Persistency of Excitation and Performance of Deterministic Learning
8
Persistency of Excitation and Performance of Deterministic Learning YUAN Chengzhi, WANG Cong College of Automation and the Center for Control and Optimization, South China University of Technology, Guangzhou 510640, P. R. China E-mail: [email protected], [email protected] Abstract: Recently, a deterministic learning theory was proposed for locally-accurate identification of nonlinear systems. In this paper, we investigate the performance of deterministic learning, including the learning speed and learning accuracy. By analyzing the convergence properties of a class of linear time-varying (LTV) systems, explicit relations between the persistency of excitation (PE) condition (especially the level of excitation) and the convergence properties of the LTV systems are derived. It is shown that the learning speed increases with the level of excitation and decreases with the upper bound of PE. The learning accuracy also increases with the level of excitation, in particular, when the level of excitation is large enough, locally-accurate learning can be achieved to the desired accuracy, whereas low level of PE may result in the deterioration of the learning performance. This paper reveals that the performance analysis of deterministic learning can be established on the basis of classical results on stability and convergence of adaptive control. Simulation studies on the Moore-Greitzer model, a well-known axial flow compressor model, are included to illustrate the effectiveness of the results. Key Words: Persistency of excitation (PE), deterministic learning, linear time-varying (LTV) systems, adaptive control. 1 Introduction Adaptation and learning are two closely related topics that had been extensively studied in the 1960s. At that time, adaptive control and learning control were competing terms having similar but somewhat undeveloped meanings (see, [1, 2] and the references therein). Since 1970s, there has been many fundamental developments of adaptive control, see the surveys and books including [2–6] and the references therein. Adaptive control has as a key feature the ability to adapt to, or ‘learn’ the unknown parameters during on- line adjustment of controller parameters in order to achieve stability and control performance. However, the learning ability of adaptive control is actually very limited. In the process whereby an adaptive control algorithm adjusts on- line the controller parameters so that closed-loop stability is maintained, it is not required that the parameters converge to their true values. The adaptive controllers need to recalcu- late the controller parameters even for repeating exactly the same control task [7]. Learning is clearly a very desirable characteristic of ad- vanced control systems, however, learning from a dynam- ical closed-loop control process is a very difficult problem. This problem is related to closed-loop identification, or more generally, learning in a nonstationary (dynamic) environ- ment [1], and has remained unresolved for a long period of time. To achieve accurate identification of system dynamic- s, it is required that the persistent excitation (PE) condition be satisfied [8], and exponential stability of a class of linear time-varing (LTV) systems arising in adaptive identification and control be established [5, 6]. The PE condition is one of the most important concepts in identification and adap- tive control. The past decades have witnessed a considerable progress on the investigation concerning the PE condition, such as the PE of neural networks [9–11], the PE in fuzzy systems [12], and the PE in passive learning control [13]. This work was supported by the National Basic Research Program (973) of China under Grant No. 2007CB311005. For general nonlinear systems, however, the PE condition is very difficult to characterize and usually cannot be verified a priori [8, 14]. Recently, a deterministic learning (or dynamic learning) ap- proach was proposed for identification and adaptive control of nonlinear systems [15, 16]. By using the localized radi- al basis function network (RBFN), a partial PE condition, i.e., the PE condition of a certain regression subvector con- structed out of the radial basis functions (RBFs) along a re- current trajectory is proven to be satisfied. This partial PE condition leads to exponential stability of the identification error system which is in the form of the LTV systems arising in identification and adaptive control. Consequently, accu- rate NN identification of the nonlinear dynamics (including closed-loop dynamics) is achieved within a local region a- long the recurrent trajectory. This approach is referred to as “deterministic learning” since it is developed not by using s- tatistical principles (e.g. [17]), but by utilizing deterministic algorithms from adaptive control (e.g. [5, 6]). The determin- istic learning approach provides an effective solution to the problem of learning in dynamic environments, and is use- ful in many applications such as dynamical pattern recogni- tion [18], learning and control of robotics [19], and oscilla- tion faults diagnosis [20]. It has been shown that the nature of deterministic learning is related to the PE condition and the exponential convergence of the class of LTV systems. Concerning the stability of the class of LTV systems, many significant results have been achieved (see, e.g., [5, 6, 21–23]). By employing the con- cept of uniform complete observability (UCO), exponential convergence of the LTV system was established under the satisfaction of the PE condition [4, 6, 21]. Interpretations of the relationship among PE, UCO and exponential stability of the LTV system are nicely summarized in [21]. In [5], com- prehensive discussions on the PE condition and parameter convergence were provided. [24, 25] placed more emphasis on the issues of robustness and effects of disturbances on Proceedings of the 30th Chinese Control Conference July 22-24, 2011, Yantai, China 2764
Transcript of Persistency of Excitation and Performance of Deterministic Learning

Persistency of Excitation and Performance of DeterministicLearning
YUAN Chengzhi, WANG Cong
College of Automation and the Center for Control and Optimization, South China University of Technology, Guangzhou 510640, P. R.China
E-mail: [email protected], [email protected]
Abstract: Recently, a deterministic learning theory was proposed for locally-accurate identification of nonlinear systems. In thispaper, we investigate the performance of deterministic learning, including the learning speed and learning accuracy. By analyzingthe convergence properties of a class of linear time-varying (LTV) systems, explicit relations between the persistency of excitation(PE) condition (especially the level of excitation) and the convergence properties of the LTV systems are derived. It is shown thatthe learning speed increases with the level of excitation and decreases with the upper bound of PE. The learning accuracy alsoincreases with the level of excitation, in particular, when the level of excitation is large enough, locally-accurate learning can beachieved to the desired accuracy, whereas low level of PE may result in the deterioration of the learning performance. This paperreveals that the performance analysis of deterministic learning can be established on the basis of classical results on stability andconvergence of adaptive control. Simulation studies on the Moore-Greitzer model, a well-known axial flow compressor model,are included to illustrate the effectiveness of the results.
Key Words: Persistency of excitation (PE), deterministic learning, linear time-varying (LTV) systems, adaptive control.
1 Introduction
Adaptation and learning are two closely related topics that
had been extensively studied in the 1960s. At that time,
adaptive control and learning control were competing terms
having similar but somewhat undeveloped meanings (see,
[1, 2] and the references therein). Since 1970s, there has
been many fundamental developments of adaptive control,
see the surveys and books including [2–6] and the references
therein. Adaptive control has as a key feature the ability
to adapt to, or ‘learn’ the unknown parameters during on-
line adjustment of controller parameters in order to achieve
stability and control performance. However, the learning
ability of adaptive control is actually very limited. In the
process whereby an adaptive control algorithm adjusts on-
line the controller parameters so that closed-loop stability is
maintained, it is not required that the parameters converge to
their true values. The adaptive controllers need to recalcu-
late the controller parameters even for repeating exactly the
same control task [7].
Learning is clearly a very desirable characteristic of ad-
vanced control systems, however, learning from a dynam-
ical closed-loop control process is a very difficult problem.
This problem is related to closed-loop identification, or more
generally, learning in a nonstationary (dynamic) environ-
ment [1], and has remained unresolved for a long period of
time. To achieve accurate identification of system dynamic-
s, it is required that the persistent excitation (PE) condition
be satisfied [8], and exponential stability of a class of linear
time-varing (LTV) systems arising in adaptive identification
and control be established [5, 6]. The PE condition is one
of the most important concepts in identification and adap-
tive control. The past decades have witnessed a considerable
progress on the investigation concerning the PE condition,
such as the PE of neural networks [9–11], the PE in fuzzy
systems [12], and the PE in passive learning control [13].
This work was supported by the National Basic Research Program
(973) of China under Grant No. 2007CB311005.
For general nonlinear systems, however, the PE condition is
very difficult to characterize and usually cannot be verified apriori [8, 14].
Recently, a deterministic learning (or dynamic learning) ap-
proach was proposed for identification and adaptive control
of nonlinear systems [15, 16]. By using the localized radi-
al basis function network (RBFN), a partial PE condition,
i.e., the PE condition of a certain regression subvector con-
structed out of the radial basis functions (RBFs) along a re-
current trajectory is proven to be satisfied. This partial PE
condition leads to exponential stability of the identification
error system which is in the form of the LTV systems arising
in identification and adaptive control. Consequently, accu-
rate NN identification of the nonlinear dynamics (including
closed-loop dynamics) is achieved within a local region a-
long the recurrent trajectory. This approach is referred to as
“deterministic learning” since it is developed not by using s-
tatistical principles (e.g. [17]), but by utilizing deterministic
algorithms from adaptive control (e.g. [5, 6]). The determin-
istic learning approach provides an effective solution to the
problem of learning in dynamic environments, and is use-
ful in many applications such as dynamical pattern recogni-
tion [18], learning and control of robotics [19], and oscilla-
tion faults diagnosis [20].
It has been shown that the nature of deterministic learning is
related to the PE condition and the exponential convergence
of the class of LTV systems. Concerning the stability of the
class of LTV systems, many significant results have been
achieved (see, e.g., [5, 6, 21–23]). By employing the con-
cept of uniform complete observability (UCO), exponential
convergence of the LTV system was established under the
satisfaction of the PE condition [4, 6, 21]. Interpretations of
the relationship among PE, UCO and exponential stability of
the LTV system are nicely summarized in [21]. In [5], com-
prehensive discussions on the PE condition and parameter
convergence were provided. [24, 25] placed more emphasis
on the issues of robustness and effects of disturbances on
Proceedings of the 30th Chinese Control ConferenceJuly 22-24, 2011, Yantai, China
2764

adaptive algorithms. By extending the definition of the PE
condition, and using modern tools which are ”integral” ver-
sions of classical Lyapunov theorems, stability and conver-
gence of a class of nonlinear time-varying (NLTV) systems
arising in nonlinear adaptive identification were investigat-
ed [22]. These results contribute greatly to the development
of adaptive control, as well as to the establishment of deter-
ministic learning.
In this paper, we further investigate the performance of deter-
ministic learning, including the learning speed and learning
accuracy. This is a very important issue for both theoret-
ical and practical reasons. The speed and accuracy of de-
terministic learning is studied by analyzing the convergence
properties of the class of LTV systems. Specifically, explicit
relations between the PE condition (especially the level of
excitation) and the convergence properties of the LTV sys-
tems are derived. The convergence rate and residual error of
the perturbed LTV system are subsequently obtained. It is
thus shown that the learning speed increases with the level
of excitation and decreases with the upper bound of PE. The
learning accuracy also increases with the level of excitation,
in particular, when the level of excitation is large enough,
locally-accurate learning can be achieved to the desired ac-
curacy, whereas low level of PE may result in the deteriora-
tion of the learning performance. The attraction of this paper
lies in that it reveals that the performance analysis of deter-
ministic learning can be conducted via convergence analysis
of the class of LTV systems arising in adaptive control, and
thus classical results on stability and convergence of adap-
tive control play a significant role in the establishment and
development of the new dynamic learning methodology.
The rest of the paper is organized as follows: Preliminary
results and problem formulation are contained in Section I-
I. Convergence properties of the perturbed LTV system and
performance of deterministic learning are analyzed in Sec-
tion III. Section IV is devoted to the simulation studies on
the Moore-Greitzer model. Section V concludes the paper.
2 Preliminaries and Problem Formulation
2.1 Localized RBF Networks and PEThe RBF networks can be described by fnn(Z) =∑N
i=1 wisi(Z) = WTS(Z) [26], where Z ∈ ΩZ ⊂ Rq
is the input vector, W = [w1, · · · , wN ]T ∈ RN is the
weight vector, N is the NN node number, and S(Z) =[s1(‖Z − ξ1‖), · · · , sN (‖Z − ξN‖)]T , with si(·) being a
radial basis function, and ξi (i = 1, · · · , N ) being distinct
points in state space. The Gaussian function si(‖Z − ξi‖)= exp
[−(Z−ξi)
T (Z−ξi)η2i
]is one of the most commonly used
radial basis functions, where ξi = [ξi1, ξi2, · · · , ξiq]T is the
center of the receptive field and ηi is the width of the re-
ceptive field. The Gaussian function belongs to the class of
RBFs in the sense that si(‖Z − ξi‖) → 0 as ‖Z‖ → ∞.
It has been shown in [11, 26] that for any continuous func-
tion f (Z) : ΩZ → R where ΩZ ⊂ Rq is a compact
set, and for the NN approximator, where the node num-
ber N is sufficiently large, there exists an ideal constan-
t weight vector W ∗, such that for each ε∗ > 0, f (Z) =W ∗TS (Z) + ε, ∀Z ∈ ΩZ , where |ε| < ε∗ is the approx-
imation error. Moreover, for any bounded trajectory Zζ(t)
within the compact set ΩZ , f(Z) can be approximated by
using a limited number of neurons located in a local re-
gion along the trajectory: f(Z) = W ∗Tζ Sζ(Z) + εζ , where
Sζ(Z) = [sj1(Z), · · · , sjζ (Z)]T ∈ RNζ , with Nζ < N ,
|sji | > ι (ji = j1, · · · , jζ), ι > 0 is a small positive con-
stant, W ∗ζ = [w∗
j1, · · · , w∗
jζ]T , and εζ is the approximation
error, with εζ = O(ε) = O(ε∗).Based on the previous results on the PE property of RBF
networks [9, 10, 14], it is shown in [16] that for a localized
RBF network WTS(Z) whose centers are placed on a reg-
ular lattice, almost any recurrent trajectory Z(t) can lead to
the satisfaction of the PE condition of the regressor subvec-
tor Sζ(Z).
2.2 Deterministic Learning and Problem FormulationIn deterministic learning, identification of system dynamic-
s of general nonlinear systems is achieved according to the
following elements: (i) employment of localized RBF net-
works; (ii) satisfaction of a partial PE condition; (iii) expo-
nential stability of the adaptive system along the periodic or
recurrent orbit; (iv) locally-accurate NN approximation of
the unknown system dynamics [16].
Consider a general nonlinear dynamical system:
x = F (x; p), x(t0) = x0 (1)
where x = [x1, · · · , xn]T ∈ Rn is the state of the sys-
tem, which is measurable, p is a system parameter vector,
F (x; p) = [f1(x; p), · · · , fn(x; p)]T is a smooth but un-
known nonlinear vector field.
Assumption 1. The state x remains uniformly bounded, i.e.,x(t) ∈ Ω ⊂ Rn, ∀t ≥ t0, where Ω is a compact set.Moreover, the system trajectory starting from x0, denotedas ϕζ(x0), is a recurrent trajectory.
The recurrent trajectory represents a large class of trajecto-
ries generated from nonlinear dynamical systems, includ-
ing not only periodic trajectories, but also quasi-periodic,
almost-periodic and even some chaotic trajectories. Rough-
ly, a recurrent trajectory is characterized as follows: given
ν > 0, there exists a finite T (ν) > 0 such that the trajectory
returns to the ν-neighborhood of any point on the trajectory
within a time not greater than T (ν). Please refer to [27] for
a rigorous definition of recurrent trajectory.
Consider the following dynamical RBF network for identifi-
cation of the unknown system dynamics F (x; p).
˙xi = −ai(xi − xi) + WTi Si(x), i = 1, · · · , n (2)
where x = [x1, · · · , xn]T is the state vector, x is the state of
system (1), ai > 0 is the design constant, and WTi Si(x) is a
RBF network used to approximate the unknown nonlinearity
fi(x; p) of (1). The weight estimates Wi in (2) are updated
by using the following Lyapunov-based learning law
˙Wi = −ΓiSi(x)xi (3)
where Γi = ΓTi > 0.
Define xi = xi − xi and Wi = Wi − W ∗i . According to
the properties of localized RBF networks, the identification
2765

error system can be derived as follows [16].[˙xi
˙Wζi
]=
[ −ai Sζi(x)T
−ΓζiSζi(x) 0
][xi
Wζi
]+
[−ε′ζi0
](4)
and˙Wζi =
˙Wζi = −ΓζiSζi(x)xi (5)
where subscripts (·)ζi and (·)ζi stand for the regions close to
and away from the trajectory, respectively, Sζi(ϕζ) is a sub-
vector of Si(x), Wζi is the corresponding weight subvector,
and |ε′ζi| is close to ε∗i where ε∗i is the ideal approximation
error (as given in Section 2.1). The following assumption is
given with regarding Sζi(x) in (4).
Assumption 2. There exists a constant k1 > 0 such that forall t ≥ 0, the following bound is satisfied,
max
{‖Sζi(x)‖,
∥∥∥∥dSζi(x)
dt
∥∥∥∥}
≤ k1 (6)
As analyzed in [16], PE of Sζi(x) is guaranteed under As-
sumption 1. Thereby, exponential stability of the LTV sys-
tem (4) is derived. Consequently, a locally-accurate NN ap-
proximation for the unknown fi(x; p) is obtained along the
trajectory ϕζ(x0) as
fi(x; p) = WTζiSζi(x) + εζi1 (7)
or by the entire RBF network as
fi(x; p) = WTi Si(x) + εi1 (8)
where εζi1 = O(ε∗i ) and εi1 = O(ε∗i ) are the practical ap-
proximation errors.
It is obvious that the above results are obtained on the basis
of qualitative analysis. The purpose of this paper is to fur-
ther analyze quantitatively the performance of deterministic
learning. Specifically, our objective is to derive explicit ex-
pression of the solution of system (4) in the following form
‖χζi(t)‖ ≤ me−λ(t−t0)‖χζi(t0)‖+ b, ∀t ≥ t0 (9)
where χζi(t) �[xi W
Tζi
]T, λ and b represent respective-
ly the convergence rate and the bound of the residual error
of system (4). On such a stage, performance of determinis-
tic learning, including learning speed and learning accuracy,
will be revealed in terms of λ, b, and εi1 , respectively. Re-
lationship between the PE level of Sζi(x) and the learning
performance will also be established.
3 Main Results
In this section, we firstly derive exponential convergence rate
and bound for the residual error of the perturbed LTV sys-
tem (4), and then analyze the performance of deterministic
learning.
3.1 Convergence Properties of the Perturbed LTV Sys-tem
Consider the nominal part of (4) as described below. We
have the following result.[˙xi
˙Wζi
]=
[ −ai STζi(x)
−ΓζiSζi(x) 0
] [xi
Wζi
]
� Aζi(x)χζi(t)
(10)
Lemma 1. Consider the LTV system (10), Under Assump-tions 1 and 2, the solution of system (10) satisfies
‖χζi(t)‖ ≤ me−λ(t−t0)‖χζi(t0)‖ (11)
with m and λ being as (12) and (13), where λmin(P ) =min {1,Γ−1
ζi }, λmax(P ) = max {1,Γ−1ζi }, N is the dimen-
sion of vector Sζi(x), and m′′, n′′ > 0 are two positive con-stants.
Proof. The proof is decomposed into three steps.
Step 1: Firstly, consider the following linear time-invariant
(LTI) system:
xLTI(t) = −aixLTI(t) + u(t)
y′(t) = xLTI(t), xLTI(t0) = 0(14)
Obviously, the transfer function of the LTI system is sta-
ble, minimum phase and rational. We choose here u(t) =STζi(x)c, where c is a constant vector. According to the anal-
ysis in [15], Assumption 1 leads to the satisfaction of the PE
condition of Sζi(x), i.e., there exist constants α1, α2, T0 >0, such that
α1 ≤∫ t0+T0
t0
‖Sζi(x(τ))T c‖2dτ ≤ α2, ∀t0 ≥ 0, ∀c ∈ RN
(15)
where α1 is referred to as the level of PE, and α2 as the upper
bound of PE. Then, under Assumption 2, and according to
the Lemma 2.6.7 in [6], we have:
α′1‖c‖2 ≤
∫ t0+δ′
t0
y′(τ)2dτ ≤ α′2‖c‖2 (16)
where α′1 = α1
2a2i, α′
2 = α2
a2i, δ′ = T0.
Step 2: In this part, we need to prove system (10) with the
output defined as
y(t) = [1, 0, . . . , 0]χζi(t) � Cχζi(t) (17)
is uniform complete observable (UCO).
In order to apply the invariant theory of UCO under output
injection [4, 6], we define the following matrixes.
A(t) =
[ −ai STζi(x)
0 0
], K(t) =
[0
−ΓζiSζi(x)
](18)
Thus, according to (15),
∫ t0+T0
t0
‖K(τ)‖2dτ
=
∫ t0+T0
t0
‖ΓζiSζi(x(τ))‖2dτ
≤∫ t0+T0
t0
‖Γζi‖2‖Sζi(x(τ))‖2dτ
= ‖Γζi‖2tr[∫ t0+T0
t0
Sζi(x(τ))Sζi(x(τ))T dτ
]
≤ N‖Γζi‖2α2 � kT0
(19)
2766

m =
√λmax(P )/λmin(P )
1− (aiα1)/[λmax(P )(ai + ‖Γζi‖α2(m′′ + n′′)√2N)2]
(12)
λ =1
2(m′′ + n′′)T0· ln
(1
1− α1/[λmax(P )(√ai + (‖Γζi‖α2(m′′ + n′′)
√2N)/
√ai)2]
)(13)
As a result, system (10) with (17) is UCO is equivalent to
system (20) is UCO.[˙xi
˙Wζi
]=
[ −ai STζi(x)
0 0
] [xi
Wζi
]= A(t)χζi(t)
y′′(t) = Cχζi(t)
(20)
The output of system (20) can be expressed as:
y′′(t) = xi(t) = e−ai(t−t0)xi(t0)
+
∫ t
t0
e−ai(t−τ)Sζi(x(τ))T Wζi(t0)dτ
� y′′1 (t) + y′′2 (t)(21)
As for y′′2 (t), by taking u(t) of (14) as Sζi(x(τ))T Wζi(t0),
it follows
α′1‖Wζi(t0)‖2 ≤
∫ t0+T0
t0
y′′2 (τ)2dτ ≤ α′
2‖Wζi(t0)‖2
(22)
On the other hand, since −ai is stable and [A(t), C] is ob-
servable, there exist γ1, γ2 > 0 and γ3(m′′T0) which in-
crease along with m′′T0 , such that∫ ∞
t0+m′′T0
y′′1 (τ)2dτ ≤ γ1‖xi(t0)‖2e−γ2m
′′T0 (23)
∫ t0+m′′T0
t0
y′′1 (τ)2dτ ≥ γ3(m
′′T0)‖xi(t0)‖2 (24)
for all t0, xi(t0) and an integer m′′ > 0 to be defined later.
Now, we choose δ′′ = (m′′ + n′′)T0. In light of inequality
(a+ b)2 ≥ 0.5a2 − b2, and following the proof of Theorem
2.6.5 in [6], it yields
∫ t0+δ′′
t0
y′′(τ)2dτ
=
∫ t0+m′′T0
t0
(y′′1 (τ) + y′′2 (τ))2dτ
+
∫ t0+δ′′
t0+m′′T0
(y′′1 (τ) + y′′2 (τ))2dτ
=[0.5γ3(m
′′T0)− γ1e−γ2m
′′T0
]‖xi(t0)‖2
+ [0.5n′′α′1 −m′′α′
2] ‖Wζi(t0)‖2
(25)
Let m′′, n′′ satisfy
0.5γ3(m′′T0)− γ1e
−γ2m′′T0 ≥ 0.25γ3(m
′′T0)
0.5n′′α′1 −m′′α′
2 ≥ α′1
(26)
Then, we have∫ t0+δ′′
t0
y′′(τ)2dτ ≥ min{α′1, 0.25γ3(m
′′T0)}‖χζi(t0)‖2
� α′′1‖χζi(t0)‖2
(27)
Similarly, applying inequality (a+b)2 ≤ 2a2+2b2, we have∫ t0+δ′′
t0
y′′(τ)2dτ ≤ max{2(m′′ + n′′)α′2, 2γ1}‖χζi(t0)‖2
� α′′2‖χζi(t0)‖2
(28)
Consequently, we achieve the following results for this step:
α′′1‖χζi(t0)‖2 ≤
∫ t0+δ′′
t0
y′′(τ)2dτ ≤ α′′2‖χζi(t0)‖2 (29)
where
α′′1 = min {α′
1, 0.25γ3(m′′T0)} =
α1
2a2i
α′′2 = max {2(m′′ + n′′)α′
2, 2γ1} = 2(m′′ + n′′)α2
a2iδ′′ = (m′′ + n′′)T0
(30)
with m′′, n′′ > 0 large enough.
Coming back to system (10) with (17), from (19), we have∫ t0+δ′′
t0
‖K(τ)‖2dτ ≤ (m′′+n′′)N‖Γζi‖2α2 � k′T0(31)
According to the Lemma 2.5.2 in [6], ∀t ≥ t0, we have:
β1‖χζi(t0)‖2 ≤∫ t0+δ
t0
y(τ)2dτ ≤ β2‖χζi(t0)‖2 (32)
where
β1 =α′′1
(1 +√k′T0
α′′2 )
2
=α1
2[ai + ‖Γζi‖α2(m′′ + n′′)√2N ]2
β2 = α′′2e
k′T0
α′′2
δ = δ′′ = (m′′ + n′′)T0
(33)
Step 3: Choosing the following Lyapunov function candi-
date:
V =1
2x2i +
1
2WT
ζiΓ−1ζi Wζi =
1
2χTζi(t)
[1 00 Γ−1
ζi
]χζi(t)
� 1
2χTζi(t)Pχζi(t)
(34)
2767

Obviously, we have
b1‖χζi(t)‖2 ≤ V ≤ b2‖χζi(t)‖2 (35)
where b1 � λmin(P ), b2 � λmax(P ).Evaluating its time derivative along the trajectories of system
(10) yields:
V = xi˙xi + WT
ζiΓ−1ζi
˙Wζi
= xi(−aixi + WTζiSζi(x)) + WT
ζiΓ−1ζi (−ΓζiSζi(x)xi)
= −aix2i ≤ 0
(36)
Integrating both sides of (36), and based on the results from
Step 2, we have∫ t0+δ
t0
V dτ = −ai
∫ t0+δ
t0
x2i dτ = −ai
∫ t0+δ
t0
y(τ)2dτ
≤ −aiβ1‖χζi(t)‖2 � −b3‖χζi(t)‖2(37)
The lemma is proved due to the satisfaction of V in (34) to
(37), and according to Lemma 1.5.2 in [6].
Based on Lemma 1, subsequently the perturbed LTV system
(4) is studied.
Theorem 1. Consider the perturbed LTV system (4). UnderAssumptions 1 and 2, the state error xi and parameter errorWζi converge exponentially to the residual set
Re ={xi, Wζi
∣∣∣‖[xi WTζi]
T ‖ ≤ b =m
λε′∗ζi
}(38)
with the rate of convergence as λ, where m and λ are givenin Theorem 1, and ‖ε′ζi(x)‖ ≤ ε
′∗ζi.
Proof. Lemma 1 establishes that the state transition matrix
Φ(t, t0) of the system (4) satisfies
‖Φ(t, t0)‖ ≤ me−λ(t−t0) (39)
Under Assumptions 1 and 2, the solution χζi(t) of (4) can
be expressed as
χζi(t) = Φ(t, t0)χζi(t0) +
∫ t
t0
Φ(t, τ)gζi(t;x)dτ (40)
where gζi(t;x) =[−ε′ζi, 0
]T. Therefore,
‖χζi(t)‖ ≤ ‖Φ(t, t0)‖‖χζi(t0)‖
+
∫ t
t0
‖Φ(t, τ)‖‖gζi(t;x)‖dτ(41)
Using (39) and ‖ε′ζi(x)‖ ≤ ε′∗ζi, we have
‖χζi(t)‖ ≤ me−λ(t−t0)‖χζi(t0)‖+mε′∗ζi
∫ t
t0
e−λ(t−τ)dτ
≤ me−λ(t−t0)‖χζi(t0)‖+ m
λε′∗ζi
(42)
This ends the proof.
Theorem 1 provides explicit rate of exponential convergence
and bounds of residual error for system (4). Now, we are able
to give further quantitative analysis of issues concerning the
performance of deterministic learning.
3.2 Performance of Deterministic Learning3.2.1 Learning Speed
In [16], preliminary relationship between the recurrent tra-
jectories generated by the nonlinear system (1) and the PE
condition of Sζi(x) was presented, which states that
α1 = θ2τ0, α2 = s∗T0 (43)
where α1 is the level of PE, α2 is the upper bound of PE,
τ0 is the minimum amount of time that ϕζ stays within a
small neighborhood of the involved neural center, and T0
is the period by which the trajectory passes through each
center of the RBF network, θ and s∗ are constants given in
Proposition 2.1 of [16]. Moreover, it has been shown via
simulation experiments that a larger τ0 and a small T0 will
make the learning proceed at a higher speed.
From Lemma 1 and Theorem 1, the following result on
learning speed can be obtained.
Corollary 1. Consider the adaptive system consisting of thenonlinear dynamical system (1), the dynamical RBF network(2) and the learning law (3). Under Assumptions 1 and 2,we have: the learning speed λ (as given in Equation (13))increases with α1 and decreases with α2. Furthermore, λ isalso proportional to τ0 and inverse proportional to T0.
Proof. In light of Lemma 1 and Theorem 1, evaluating the
partial derivative of λ in Equation (13) with respect to α1,
α2, it can be easily obtained that dλdα1
> 0, dλdα2
< 0. This
means that λ ∝ α1, λ ∝ 1α2
. Further, from (43), α1 ∝ τ0and α2 ∝ T0. It is thus clear that λ ∝ τ0 and λ ∝ 1
T0. This
ends the proof.
Remark 1. Corollary 1 shows that the higher the PE level ofSζi(x) is, the faster the learning speed will be. Furthermore,the faster the trajectory moves, as well as that the longer theperiod of the trajectory is, the slower the learning speed willbe.
3.2.2 Learning Accuracy
The learning accuracy discussed in this part is related to both
the convergence bound b and the practical NN approximation
error εi1 (as in (8)). In the following, we further study the
relationship between the PE level and the learning accuracy,
and analyze the practical NN approximation error.
Corollary 2. Consider the adaptive system consisting of thenonlinear dynamical system (1), the dynamical RBF network(2) and the learning law (3). Under Assumptions 1 and 2, wehave: (i) there exist a positive constant α∗
1 such that ∀α1 ∈[0, α∗
1), b ∝ 1α1
and ∂b∂α1
∝ α1; (ii) there exist constants 0 <α∗1 < α∗
1 < α∗1 such that ∀α′
1 ∈ [0, α∗1] and ∀α′′
1 ∈ [α∗1, α
∗1),
b(α′1) � b(α′′
1 ); and (iii) when α1 ∈ [α∗1, α
∗1), the practical
approximation error εi1 (as given in (8)) is of the order of ε∗i ,where ε∗i is the ideal approximation error.
Proof. (i) Substituting (12) and (13) into (38), and de-
note C = 2(m′′ + n′′)T0
√λmax(P )/λmin(P ) and K =
λmax(P )(√ai + (‖Γζi‖α2(m
′′ + n′′)√2N)/
√ai)
2. Then,
we have:
b =Cε
′∗ζi√
1− α1/K ln(
11−α1/K
) (44)
2768

Evaluating the partial derivative of b with respect to α1,
yields
∂b
∂α1= − Cε
′∗ζi[√
1− α1/K ln(
11−α1/K
)]2
·∂[√
1− α1/K ln(
11−α1/K
)]∂α1
= −Cε
′∗ζi
[1− 1
2 ln(
11−α1/K
)]K (1− α1/K)
32
[ln(
11−α1/K
)]2
(45)
Let ∂b∂α1
< 0, we have
1− ln
√1
1− α1/K> 0
α1 < K(1− e−2) � α∗1
(46)
Further, it can be easily obtained that b∣∣α1=0
= ∞, and
b∣∣α1=α∗
1= 1
2Ceε′∗ζi � b(α∗
1). Then, it can be concluded
that for all α1 ∈ [0, α∗1), b is monotone decreasing with α1
from ∞ to b(α∗1).
Now, we examine the speed of this monotone decreasing
variation of b. Evaluating the second derivative of b with
respect to α1, yields
∂2b
∂α21
=Cε
′∗ζi (1− α1/K)
12 ln
(1
1−α1/K
)K2 (1− α1/K)
3[ln
(1
1−α1/K
)]4·{3
4
[ln
(1
1− α1/K
)]2− 2 ln
(1
1− α1/K
)+ 2
}
(47)
According to the condition (46), it can be derived that ∂2b∂α2
1>
0, ∀α1 ∈ [0, α∗1). Moreover, calculating ∂b
∂α1at α1 = 0
and α1 = α∗1, respectively, yields ∂b
∂α1
∣∣∣α1=0
= −∞ and
∂b∂α1
∣∣∣α1=α∗
1
= 0. This means that ∀α1 ∈ [0, α∗1), b is mono-
tone decreasing from ∞ to b(α∗1) with the decreasing speed
increasing monotonously from −∞ to 0.
(ii) Based on the results that ∀α1 ∈ [0, α∗1),
∂b∂α1
<
0, ∂2b∂α2
1> 0, b(0) = ∞, ∂b
∂α1
∣∣∣α1=0
= −∞, ∂b∂α1
∣∣∣α1=α∗
1
=
0, it can be concluded that ∀ε < 0, there exists a α1ε ∈[0, α∗
1) such that ∂b∂α1
∣∣∣α1=α1ε
= ε. Thereby, α∗1 and α∗
1 can
be obtained by choosing |ε| large enough and small enough,
respectively, such that b(α∗1) � b(α∗
1).(iii) When α1 ∈ [α∗
1, α∗1), it is clearly seen that
b(α1) = O(b(α∗1)) = O(ε
′∗ζi) = O(ε∗i ) (48)
Since ‖Wζi‖ ≤ b, and from (7) and (8), it can be obtained as
in [16] that
εζi1 = εζi − WTζiSζi(ϕζ) = O(ε
′∗ζi) = O(ε∗i ) (49)
Since the neural weights Wζi will only be slightly updated,
both Wζi and WTζiSζi(x) will remain to be very small [16].
Consequently, the practical approximation error εi1 satisfies
εi1 = WTζiSζi(ϕζ) + εζi1 = O(ε∗i ) (50)
Thus, it means that the approximation errors can be made
to the order of the ideal approximation error ε∗i . Thereby,
locally accurate approximation for fi(x; p) along the trajec-
tory ϕζ to the desired level ε∗i can be achieved by using RBF
network WTi Si(x). This ends the proof.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
200
400
600
800
1000
1200
α1
b/ε ζ
i*
(a)
0.5 1 1.5 2 2.5 3 3.5 4 4.58
10
12
14
16
18
20
22
24
26
α1
b/ε ζ
i*
(b)
Fig. 1: Relationship between PE level and learning accuracy
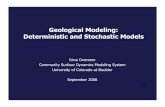
Remark 2. The relationship between b and α1 is shown inFig. 1. It is seen that b
ε′∗ζi
decrease with α1. When α1 is smal-
l, bε′∗ζi
is very large, which implies that low PE level α1 leads
to large convergence error b (as shown in Fig. 1(a)), and inturn, large approximation error εi1 . In this case, accuratelearning cannot be achieved. On the other hand, when α1
is large enough, bε′∗ζi
becomes small, and as shown in Fig.
1(b), b = O(ε′∗ζi) = O(ε∗i ) holds, which means that accurate
learning can be achieved. Moreover, the larger τ0 (whichmeans the slower the trajectory moves), and the shorter theperiod T0 of the trajectory will yield better learning accura-cy.
4 Simulation Studies on the Moore-Greitzer Mod-el
Modeling and control for axial flow compression systems
have received great attention in recent years (see [28] and
the references therein). Two of the important and challeng-
ing topics in this field are identification and detection of ro-
tating stall and surge in compressor, which can effectively
reduce engine performance, and consume a major fraction
of an engine development program [28].
In this section, the Moore-Greitzer model, a low-order non-
linear state-space model developed by Moore and Greitzer
[29] that captures the nonlinear dynamics of the compressor
system through its bifurcation characteristic [28], is prelimi-
narily taken as an example for simulation study.
According to [30], the Moore-Greitzer model provided by
[29] can be reduced to a set of three ordinary differential
equations as:
dΦ
dξ= −Ψ+Ψc(Φ)− 3ΦR+ p
dΨ
dξ=
1
β2(Φ− ΦT (Ψ)) + p
dR
dξ= σR(1− Φ2 −R)
(51)
2769

where ξ stands for the time nondimensionalized by the ro-
tor speed, Ψ is the pressure rise coefficient, Φ represents the
axial flow coefficient, R denotes the square of amplitude of
angular disturbance of axial-flow coefficient, and ΦT (Ψ) is
the inverse function of Ψ which satisfies Ψ = 1γ (ΦT + 1)2,
and where γ is proportional to the cross-sectional area of
the throttle, and is used to control the exit mass flow [30].
According to [29, 30], if the value of γ decreases, the sta-
bility margin of system (51) follows to decrease, which can
consequently lead to the occurrence of rotating stall. To il-
lustrate these variance more explicitly, a small disturbance
signal p = 110 (sin (ξ) + cos (ξ)) is added to the original dy-
namics with respect to Φ and Ψ, respectively (as denoted by
the last term of the corresponding equations in (51)). We
refer readers to [29] and [30] for definitions of the rest coef-
ficients and more specific descriptions. Details are omitted
here due to the space limitations.
Assume that the state vector defined as [Ψ,Φ, J ]T � x are
available from measurement, and the system dynamics dΦdξ �
f1(x),dΨdξ � f2(x) and dJ
dξ � f3(x) are mostly unknown to
the identifier. The RBF network identifiers are obtained as in
(2) and (3) to learn the unknown system dynamics fi(x), i =1, 2, 3.
The relationship between the learning speed and α1, α2 as
presented by Corollary 1 can be illustrated by simulations in
[16]. Thus, the corresponding simulations are omitted here
due to limitation of space. The following simulations are
devoted to illustrating the identification results of rotating
stall associated with different PE levels.
According to [30], by setting different values of γ, we
can obtained different corresponding trajectories of stability
leading to the inception of rotating stall. For the concise-
ness of presentation, we only focus on the identification of
the system dynamic f1(x) undergoing a pattern of the incep-
tion of rotating stall which can be generated by by setting
γ = 1.02. Comparison experiments are given to illustrate
the results in Corollary 2.
We construct the RBF network with the centers μ evenly
placed on [0.4, 1.5]× [3, 4.4]× [−0.5, 0.5], and the neurons
constructed in the phase pace as 11×11×11. The rest param-
eters are fixed as a = 3.5, Γ = 3, the initial weights W (0) =0, and the initial conditions x(0) = [1.375, 3.75, 4]T and
x(0) = [0.2, 0.3, 0]T . Different PE levels will be generat-
ed and indicated by choosing different values of η, i.e., the
width of the receptive field (as described in section 2.1).
Figs. 2(a) and 2(b) respectively display the pattern of the
inception of rotating stall in phase space and states x of the
pattern.
Firstly, the value of η is respectively set as 0.15, 0.2 to ob-
tain two different but large enough PE levels. Accordingly,
compare the NN parameter convergence in Fig. 3(a) with
that in Fig. 4(a), and the function approximation result in
Fig. 3(b) with that in Fig. 4(b). It is shown that under large
enough PE levels, the learning results in both cases are sat-
isfactory, the approximation errors are both on the small lev-
els. Consequently, locally accurate learning can be achieved
to a desired accuracy level.
Secondly, let η = 0.08 and η = 0.4 to yield the correspond-
ing learning results presented by Figs. 5 and 6. It can be
clearly seen that approximation errors in Figs. 5(b) and 6(b)
are apparently larger than those in Figs. 3(b) and 4(b). As
the statement in Corollary 2, when the PE level cannot be
guaranteed to be large enough (i.e., α1 does not locate in
[α∗1, α
∗1)), approximation errors of the corresponding learn-
ing result may suddenly become very large.
From the preliminary experiments on the Moore-Greitzer
model presented above, it is seen that based on the deter-
ministic learning theory, with large enough PE levels being
guaranteed by appropriately constructing the RBFs, the non-
linear dynamics of the Moore-Greitzer model can be locally
accurately identified along recurrent pattern trajectories to
the desired error level. However, locally accurate learning
may be violated when the PE level can not be guaranteed
to be large enough. Furthermore, it is worth noticing that
the nonlinear dynamics of the compressor undergoing a tra-
jectory of the inception of rotating stall can be accurately
identified. From a perspective of practical applications, this
identification result provides a dispensable basis for further
detecting/predicting rotating stall and surge in compressors.
5 Conclusions
In this paper, performance analysis of deterministic learning
including the learning speed and accuracy has been investi-
gated. By analyzing the convergence properties of a class
of LTV systems arising in adaptive control, explicit rela-
tions between the PE condition (especially the level of ex-
citation) and the convergence properties of the LTV systems
have been derived. It has been shown that the learning speed
increases with the level of excitation and decreases with the
upper bound of PE; the learning accuracy also increases with
the level of excitation, and in particular, when the level of
excitation is large enough, locally-accurate learning can be
achieved to the desired accuracy, whereas low level of PE
may result in the deterioration of the learning performance.
As an application, it has been shown that local-accurate iden-
tification of the nonlinear dynamics of the Moore-Greitzer
model can be achieved along variant patterns, which is sub-
stantial for further research on the rapid detection of rotating
stall and surge of axial compression systems.
−0.50
0.51
1.5
2
3
4
50
1
2
3
4
Φ
Trajectory in phase space
Ψ
J
(a) System trajectory in phase s-
pace
0 50 100 150 200 250 300−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Time(Seconds)
Periodic states
(b) System states: Φ : ”− ”; Ψ :”−−”; R : ” · · · ”
Fig. 2: Trajectory of the inception of rotating stall
REFERENCES[1] K. S. Fu, Learning Control Systems. NY: Plenum Press, 1969.
[2] Y. Z. Tsypkin, Adaptation and Learning in Automatic Systems.
NY: Academic Press, 1971.
[3] K. J. Astrom, “Theory and applications of adaptive control, a
survey,” Automatica, vol. 19, no. 5, pp. 471–486, 1983.
[4] P. A. Ioannou and J. Sun, Robust Adaptive Control. Engle-
wood Cliffs, NJ: Prentice Hall, 1995.
2770

0 50 100 150 200 250 300−0.1
−0.05
0
0.05
0.1
0.15
Time(Seconds)
Partial parameter convergence:W1
(a) NN parameter convergence of
W1
270 275 280 285 290 295 300−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time(Seconds)
Function approximation
(b) Function approximation: f1 :” − ”; WT
1 S1 : ” − −”; ε11 :” · · · ”
Fig. 3: Learning results of f1(x) with η = 0.15
0 50 100 150 200 250 300−0.04
−0.02
0
0.02
0.04
0.06
0.08
Time(Seconds)
Partial parameter convergence:W1
(a) NN parameter convergence of
W1
270 275 280 285 290 295 300−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time(Seconds)
Function approximation
(b) Function approximation: f1 :” − ”; WT
1 S1 : ” − −”; ε11 :” · · · ”
Fig. 4: Learning results of f1(x) with η = 0.2
[5] K. S. Narendra and A. M. Annaswamy, Stable Adaptive Sys-tems. NJ: Prentice-Hall, 1989.
[6] S. Sastry and M. Bodson, Adaptive Control: Stability, Conver-gence, and Robustness. Englewood Cliffs, NJ: Prentice-Hall,
1989.
[7] J. Farrell and W. Baker, Learning Control Systems. Norwell,
MA: Kluwer Academic, 1993.
[8] L. Ljung, System Identification: Theory for the User, 2nd ed.
Englewood Cliffs, NJ: Prentice Hall, 1999.
[9] D. Gorinevsky, “On the persistency of excitation in radial basis
function network identification of nonlinear systems,” IEEETrans. Neural Netw., vol. 6, no. 5, Sep. 1995.
[10] A. J. Kurdila, F. J. Narcowich, and J. D. Ward, “Persistency of
excitation in identification using radial basis function approx-
imations,” SIAM J. Control and Optimization, vol. 33, no. 2,
pp. 625–642, Mar. 1995.
[11] M. J. D. Powell, The Theory of Radial Basis Function Ap-proximation in 1990. Oxford University Press, 1992.
[12] C. K. Chak, G. Feng, and S. G. Cao, “On the persistency of
excitation in fuzzy systems,” in Proc. 5th. IEEE on Fuzzy Sys-tems, New Orleans, LA, Sep. 1996, pp. 824–827.
[13] J. A. Farrell, “Persistence of excitation conditions in passive
learning control,” Automatica, vol. 33, pp. 699–703, 1997.
[14] S. Lu and T. Basar, “Robust nonlinear system identifica-
tion using neural-network models,” IEEE Trans. Neural Netw.,vol. 9, no. 3, pp. 407–429, 1998.
[15] C. Wang and D. J. Hill, “Learning form neural control,” IEEETrans. Neural Netw., vol. 17, no. 1, Jan. 2006.
[16] C. Wang and D. J. Hill, Deterministic Learning Theory forIdentification, Recognition and Control. Boca Raton, FL:
CRC Press, 2009.
[17] V. N. Vapnik, Statistical Learning Theory: Adaptive andlearning systems for signal processing, communications, andcontrol, 1998.
[18] C. Wang and D. J. Hill, “Deterministic learning and rapid
dynamical pattern recognition,” IEEE Trans. Neural Netw.,vol. 18, pp. 617–630, 2007.
[19] Z. Xue, C. Wang, and T. Liu, “Deterministic learning and
0 50 100 150 200 250 300−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Time(Seconds)
Partial parameter convergence:W1
(a) NN parameter convergence of
W1
270 275 280 285 290 295 300−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Time(Seconds)
Function approximation
(b) Function approximation: f1 :” − ”; WT
1 S1 : ” − −”; ε11 :” · · · ”
Fig. 5: Learning results of f1(x) with η = 0.08
0 50 100 150 200 250 300−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
Time(Seconds)
Partial parameter convergence:W1
(a) NN parameter convergence of
W1
270 275 280 285 290 295 300−0.5
0
0.5
1
Time(Seconds)
Function approximation
(b) Function approximation: f1 :” − ”; WT
1 S1 : ” − −”; ε11 :” · · · ”
Fig. 6: Learning results of f1(x) with η = 0.4
robot manipulator control,” in Proc. IEEE on Intel. Confer.Robotics Biom., Sanya, China, Dec. 2007.
[20] C. Wang and T. Chen, “Rapid detection of oscillation faults
via deterministic learning,” in Proc. of 8th IEEE Intel. Congr.on Contr. Automation, Xiamen, China, 2010.
[21] B. O. Anderson, “Exponential stability of linear equations
arising in adaptive identification,” IEEE Trans. Autom. Con-trol, vol. AC-22, pp. 83–88, Jan. 1977.
[22] E. Panteley, A. Loria, and A. Teel, “Relaxed persistency of
excitation for uniform asymptotic stability,” IEEE Trans. Au-tom. Control, vol. 46, no. 12, Dec. 2001.
[23] A. P. Morgan and K. S. Narendra, “On the uniform asymptot-
ic stability of certain linear nonautonomous differential equa-
tions,” SIAM J. Control and Optimization, vol. 15, no. 1, Jan.
1977.
[24] G. Feng, “Analysis of a new algorithm for continuous-time
robust adaptive control,” IEEE Trans. Autom. Control, vol. 44,
pp. 1764–1768, Aug. 2002.
[25] H. F. Chen and L. Guo, “Robustness analysis of identifica-
tion and adaptive control for stochastic systems,” Syst. ControlLett., vol. 9, pp. 131–140, 1987.
[26] J. Park and I. W. Sandberg, “Universal approximation using
radial-basis-function networks,” Neural Comput., vol. 3, no. 2,
pp. 246–257, 1991.
[27] L. P. Shilnikov, Methods of Qualitative Theory in NonlinearDynamics, Part II. Singapore: World Scientific, 2001.
[28] G. Gu, A. Sparks, and S. S. Banda, “An overview of rotat-
ing stall and surge control for axial flow compressors,” IEEETrans. Control Syst. Technol., vol. 7, no. 6, pp. 639–647, Nov.
1999.
[29] F. K. Moore and E. M. Greitzer, “A theory of poststall tran-
sients in axial compressors, part i: Development of the equa-
tions,” ASME J. Engr. Gas Turbines Power, vol. 108, pp. 68–
76, 1986.
[30] F. E. McCaughan, “Bifurcation analysis of axial flow com-
pressor stability,” SIAM Journal of Appl. Math., vol. 20, pp.
1232–1253, 1990.
2771