
On Balancing Energy Consumption in Wireless Sensor Networks 1 2
16
IEEE Proof IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY 1 On Balancing Energy Consumption in Wireless Sensor Networks 1 2 Fatma Bouabdallah, Nizar Bouabdallah, and Raouf Boutaba 3 Abstract—Wireless sensor networks (WSNs) require protocols 4 that make judicious use of the limited energy capacity of the 5 sensor nodes. In this paper, the potential performance improve- 6 ment gained by balancing the traffic throughout the WSN is 7 investigated. We show that sending the traffic generated by each 8 sensor node through multiple paths, instead of a single path, allows 9 significant energy conservation. A new analytical model for load- 10 balanced systems is complemented by simulation to quantitatively 11 evaluate the benefits of the proposed load-balancing technique. 12 Specifically, we derive the set of paths to be used by each sensor 13 node and the associated weights (i.e., the proportion of utilization) 14 that maximize the network lifetime. 15 Index Terms—Energy conservation, load balancing, perfor- 16 mance analysis, routing, wireless sensor networks (WSNs). 17 I. I NTRODUCTION 18 T HE LIMITED energy capacity of sensor nodes dictates 19 how communications must be performed inside wireless 20 sensor networks (WSNs). WSN protocols must make judicious 21 use of the finite-energy resources. Typically, sensor nodes avoid 22 direct communication with a distant destination since a high 23 transmission power is needed to achieve a reliable transmission 24 [1], [2]. Instead, sensor nodes communicate by forming a 25 multihop network to forward messages to the collector node, 26 which is also called the sink node. In this regard, efficient 27 routing in such multihop networks becomes crucial in achieving 28 energy efficiency. In addition to using multihop communication 29 for reducing the energy requirements for communication, an 30 efficient routing protocol is needed to decrease the end-to-end 31 energy consumption when reporting data to the sink node. 32 To improve the network lifetime, extensive research on de- 33 signing energy-efficient medium-access control (MAC) proto- 34 cols has been conducted in the literature [3]–[5]. Accordingly, 35 the sensor nodes turn off some hardware components when they 36 are unused. As such, the wasted energy due to idle listening 37 Manuscript received March 13, 2008; revised August 17, 2008 and September 30, 2008. The review of this paper was coordinated by Dr. W. Zhuang. F. Bouabdallah is with the Institut National de Recherche en Informatique et en Automatique, 35042 Rennes, France (e-mail: fatma.bouabdallah_othman@ inria.fr). N. Bouabdallah is with the Institut National de Recherche en Informatique et en Automatique, 35042 Rennes, France, and also with the David R. Cheriton School of Computer Science, University of Waterloo, Waterloo, ON N2L 3G1, Canada (e-mail: [email protected]). R. Boutaba is with the School of Computer Science, University of Waterloo, Waterloo, ON N2L 3G1, Canada (e-mail: [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TVT.2008.2008715 to the medium is reduced. Indeed, a transceiver that constantly 38 senses the channel will quickly deplete the sensor node energy 39 and dramatically shorten the network lifetime. Thus, it is im- 40 perative that the idle sensor nodes enter sleep mode as often as 41 possible [11]. However, each sensor node must coordinate with 42 its neighbors to ensure communications when needed. To do so, 43 the works in [3]–[10] suggested wake-up scheduling schemes at 44 the MAC layer to activate sleeping nodes when needed. On the 45 other hand, the works in [12] and [13] addressed the problem at 46 the network layer by proposing new routing solutions that take 47 into account the sleep state of some network nodes. 48 To date, much of the work on WSNs has focused on the 49 energy minimization problem, taking into consideration the 50 individual sensor node performance, i.e., finding methods that 51 allow each sensor node to consume the minimum amount of en- 52 ergy subject to a given traffic load for handling. However, there 53 has been little focus on how traffic is balanced throughout mul- 54 tihop WSNs and how it impacts the overall network lifetime. 55 In this paper, the use of multiple paths between each sensor 56 node and the sink node is considered. It is shown that the 57 network lifetime can be improved by efficiently routing (i.e., 58 balancing) the traffic inside the WSN. 59 Assuming the network lifetime as the time for the first node 60 in the WSN to fail, a perfect routing protocol would slowly and 61 uniformly drain energy among nodes, leading to the death of 62 all nodes nearly at the same time. Typically, an ideal routing 63 protocol would avoid the fast drain of sensor nodes with high 64 energy consumption. To achieve this, we propose balancing the 65 energy consumption throughout the network by sending the 66 traffic generated by each sensor node through multiple paths, 67 instead of always forwarding through the same path. In fact, 68 always routing through the same path will quickly deplete the 69 energy of the sensor nodes contained therein. The problem 70 then consists of determining the set of routes to be used by 71 each sensor node and the associated weights (i.e., the routing 72 configuration) that maximize the network lifetime. 73 Using a classical contention-based access method to the data 74 channel and the most commonly used acknowledgment (ACK) 75 model to ensure reliable transmissions, a new analytical model 76 is developed for calculating the energy consumption at each 77 sensor node per unit of time, given a specific routing config- 78 uration. The energy consumed by a sensor node corresponds 79 to that used to transmit its own generated messages and to 80 relay the pass-through traffic of other sensor nodes. Moreover, 81 to better evaluate the real behavior of WSNs, we consider the 82 wasted energy due to retransmissions, overhearing, and idle 83 listening, which is not the case in many models developed in 84 the literature [13], [19]. Building on these results, we derive 85 0018-9545/$25.00 © 2009 IEEE
Transcript of On Balancing Energy Consumption in Wireless Sensor Networks 1 2
IEEE
Proo
f
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY 1
On Balancing Energy Consumption inWireless Sensor Networks
1
2
Fatma Bouabdallah, Nizar Bouabdallah, and Raouf Boutaba3
Abstract—Wireless sensor networks (WSNs) require protocols4that make judicious use of the limited energy capacity of the5sensor nodes. In this paper, the potential performance improve-6ment gained by balancing the traffic throughout the WSN is7investigated. We show that sending the traffic generated by each8sensor node through multiple paths, instead of a single path, allows9significant energy conservation. A new analytical model for load-10balanced systems is complemented by simulation to quantitatively11evaluate the benefits of the proposed load-balancing technique.12Specifically, we derive the set of paths to be used by each sensor13node and the associated weights (i.e., the proportion of utilization)14that maximize the network lifetime.15
Index Terms—Energy conservation, load balancing, perfor-16mance analysis, routing, wireless sensor networks (WSNs).17
I. INTRODUCTION18
THE LIMITED energy capacity of sensor nodes dictates19
how communications must be performed inside wireless20
sensor networks (WSNs). WSN protocols must make judicious21
use of the finite-energy resources. Typically, sensor nodes avoid22
direct communication with a distant destination since a high23
transmission power is needed to achieve a reliable transmission24
[1], [2]. Instead, sensor nodes communicate by forming a25
multihop network to forward messages to the collector node,26
which is also called the sink node. In this regard, efficient27
routing in such multihop networks becomes crucial in achieving28
energy efficiency. In addition to using multihop communication29
for reducing the energy requirements for communication, an30
efficient routing protocol is needed to decrease the end-to-end31
energy consumption when reporting data to the sink node.32
To improve the network lifetime, extensive research on de-33
signing energy-efficient medium-access control (MAC) proto-34
cols has been conducted in the literature [3]–[5]. Accordingly,35
the sensor nodes turn off some hardware components when they36
are unused. As such, the wasted energy due to idle listening37
Manuscript received March 13, 2008; revised August 17, 2008 andSeptember 30, 2008. The review of this paper was coordinated byDr. W. Zhuang.
F. Bouabdallah is with the Institut National de Recherche en Informatique eten Automatique, 35042 Rennes, France (e-mail: [email protected]).
N. Bouabdallah is with the Institut National de Recherche en Informatiqueet en Automatique, 35042 Rennes, France, and also with the David R. CheritonSchool of Computer Science, University of Waterloo, Waterloo, ON N2L 3G1,Canada (e-mail: [email protected]).
R. Boutaba is with the School of Computer Science, University of Waterloo,Waterloo, ON N2L 3G1, Canada (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TVT.2008.2008715
to the medium is reduced. Indeed, a transceiver that constantly 38
senses the channel will quickly deplete the sensor node energy 39
and dramatically shorten the network lifetime. Thus, it is im- 40
perative that the idle sensor nodes enter sleep mode as often as 41
possible [11]. However, each sensor node must coordinate with 42
its neighbors to ensure communications when needed. To do so, 43
the works in [3]–[10] suggested wake-up scheduling schemes at 44
the MAC layer to activate sleeping nodes when needed. On the 45
other hand, the works in [12] and [13] addressed the problem at 46
the network layer by proposing new routing solutions that take 47
into account the sleep state of some network nodes. 48
To date, much of the work on WSNs has focused on the 49
energy minimization problem, taking into consideration the 50
individual sensor node performance, i.e., finding methods that 51
allow each sensor node to consume the minimum amount of en- 52
ergy subject to a given traffic load for handling. However, there 53
has been little focus on how traffic is balanced throughout mul- 54
tihop WSNs and how it impacts the overall network lifetime. 55
In this paper, the use of multiple paths between each sensor 56
node and the sink node is considered. It is shown that the 57
network lifetime can be improved by efficiently routing (i.e., 58
balancing) the traffic inside the WSN. 59
Assuming the network lifetime as the time for the first node 60
in the WSN to fail, a perfect routing protocol would slowly and 61
uniformly drain energy among nodes, leading to the death of 62
all nodes nearly at the same time. Typically, an ideal routing 63
protocol would avoid the fast drain of sensor nodes with high 64
energy consumption. To achieve this, we propose balancing the 65
energy consumption throughout the network by sending the 66
traffic generated by each sensor node through multiple paths, 67
instead of always forwarding through the same path. In fact, 68
always routing through the same path will quickly deplete the 69
energy of the sensor nodes contained therein. The problem 70
then consists of determining the set of routes to be used by 71
each sensor node and the associated weights (i.e., the routing 72
configuration) that maximize the network lifetime. 73
Using a classical contention-based access method to the data 74
channel and the most commonly used acknowledgment (ACK) 75
model to ensure reliable transmissions, a new analytical model 76
is developed for calculating the energy consumption at each 77
sensor node per unit of time, given a specific routing config- 78
uration. The energy consumed by a sensor node corresponds 79
to that used to transmit its own generated messages and to 80
relay the pass-through traffic of other sensor nodes. Moreover, 81
to better evaluate the real behavior of WSNs, we consider the 82
wasted energy due to retransmissions, overhearing, and idle 83
listening, which is not the case in many models developed in 84
the literature [13], [19]. Building on these results, we derive 85
0018-9545/$25.00 © 2009 IEEE

IEEE
Proo
f
2 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY
the optimal routing configuration that maximizes the network86
lifetime. For the numerical results, a variety of network topolo-87
gies are considered, including regular and arbitrary meshed88
topologies and varying network sizes. As a main contribution89
of our paper, we show that, by efficiently balancing the traffic90
inside the network, significant energy savings of up to 15% can91
be achieved, compared to the basic routing protocols.92
Section II presents the state of the art related to the focus of93
this paper. Section III formulates the general problem statement94
and presents the system model to be studied. This model is95
then formally studied in Section IV. Specifically, we derive the96
energy consumed by each sensor node per unit of time, given97
a specific routing configuration. The results are provided in98
Section V, where we evaluate the performance of our proposal,99
using two well-known routing protocols as baseline examples.100
This paper concludes with a summary of our conclusions and101
contributions.102
II. RELATED WORK103
To minimize the energy consumption in WSNs, several104
energy-efficient MAC protocols [3]–[5] and energy-efficient105
routing protocols [12], [13] have been proposed in the literature.106
These schemes aim at decreasing the energy consumption by107
using sleep schedules [14]. The key idea behind this concept is108
completely turning off some parts of the sensor circuitry (e.g.,109
microprocessor, memory, and radio) when it does not receive110
or transmit data, instead of keeping the sensor node in the idle111
mode. This scheme simply attempts to reduce wasted energy112
due to idle listening, i.e., lost energy while listening to receive113
possible traffic that is not sent. To do so, the works in [3]–[10]114
suggest wake-up scheduling schemes at the MAC layer to115
activate sleeping nodes when needed. On the other hand, the116
works in [12] and [13] address the problem at the network layer117
by proposing new routing solutions that take into account the118
sleep state of some network nodes. Additional solutions for re-119
ducing energy consumption, based on congestion control, have120
also been proposed in [15] and [16]. These mechanisms aim121
at achieving further energy conservation by reducing the en-122
ergy wastage resulting from the frequently occurring collisions123
in WSNs.124
Although there is significant energy savings achieved by such125
schemes based on the sleep schedules, the WSN keeps sending126
redundant data. Typically, WSNs rely on the cooperative effort127
of the densely deployed sensor nodes to report detected events.128
As a result, multiple sensor nodes may report the same event.129
To further decrease energy consumption, we have proposed in130
[17] a MAC scheme that eliminates the transmission of useless131
redundant information by profiting from the spatial correlation132
between nodes, as in [18].133
While the previous approaches are quite useful, the energy134
efficiency of these protocols can considerably be affected if the135
traffic is far from being uniformly distributed in the network.136
Typically, these protocols aim at minimizing the energy con-137
sumed by each sensor node subject to a given traffic load for138
handling. However, there has been little focus on how traffic139
is balanced throughout multihop WSNs and how it impacts the140
network lifetime.141
In view of this, significant energy savings can be achieved 142
at the routing level when considering the multihop ability. Our 143
work is motivated by the results presented in [19], where the 144
authors investigated the problem of lifetime maximization in 145
WSNs under the constraint of end-to-end transmission suc- 146
cess probability. To do so, the authors adopted a cross-layer 147
strategy that considers the physical layer (i.e., power control), 148
the MAC layer (i.e., transmission control), and the network 149
layer (i.e., routing control). Specifically, regarding the network 150
layer, the authors formulated the problem of multihop routing 151
in the context of WSNs by considering the energy constraint 152
required for reliable end-to-end transmission. Building on this 153
formulation, the authors derived, for each sensor node, the path 154
with the minimum energy consumption, assuming collision- 155
free transmissions on the shared channel. This problem, which 156
is also well known as the minimum total energy (MTE) routing 157
problem, has extensively been addressed in the context of 158
ad-hoc networks [20]–[22]. The MTE problem consists of 159
finding the route that minimizes the total consumed energy 160
between any pair of source and destination nodes. 161
Nevertheless, using the MTE routing, i.e., always routing 162
through the path with the minimum energy consumption, will 163
quickly deplete the energy of the sensor nodes contained 164
therein. To address this issue, Kwon et al. [19] introduced the 165
concept of routing packets such that energy consumption is bal- 166
anced among multiple paths. However, in doing so, Kwon et al. 167
considered a simplistic scenario such as that when the medium 168
is slotted, i.e., for each transmission, all the network nodes are 169
supposed to be in sleep state, except for the sender and receiver 170
nodes. Thus, collision-free transmission is ensured. As such, 171
the typical energy wasted by the sensor nodes due to collisions, 172
overhearing, and idle listening was not considered. 173
In this paper, a general scenario with a conventional 174
contention-based access method to the wireless channel is 175
considered. We provide an in-depth analysis of load balancing 176
through multihop WSNs. Although this work takes inspiration 177
from [19], it differs in several ways. First, a more realistic sce- 178
nario with multiple-access nodes competing to access the com- 179
mon wireless channel is considered. This reveals some of the 180
major strengths of the WSN capabilities, e.g., the cooperative 181
effort of the densely deployed sensor nodes to report detected 182
events. It also allows for direct comparison with basic systems 183
(i.e., where traffic balancing is not considered), without any ad- 184
ditional assumptions, showing the clear benefit of load balanc- 185
ing. Our model indeed captures the real behavior of WSNs by 186
considering the wasted energy due to retransmissions, overhear- 187
ing, and idle listening. Second, this paper explores the impact of 188
collisions and the unreliability of links on the energy consump- 189
tion, considering the hidden-node problem that is typical in 190
multihop networks. This paper shows how collisions (i.e., con- 191
gestion) can be reduced through load balancing. In other words, 192
this paper illustrates how spatial reuse of the wireless channel 193
can be exploited to achieve additional energy conservation. 194
As an alternative to our multiple-path-routing approach for 195
achieving load balancing, the works in [23]–[26] proposed 196
instead the use of adaptive routing schemes, where the routing 197
decisions are made on the fly by considering the current residual 198
energy at the sensor nodes. These schemes balance between 199
IEEE
Proo
f
BOUABDALLAH et al.: ON BALANCING ENERGY CONSUMPTION IN WSNs 3
the MTE and the max-min residual energy routing [27], which200
selects the path whose minimum residual energy fraction after a201
packet delivery is the maximum. References [23]–[26] have the202
same design philosophy. They attempt to use the path with the203
minimum energy consumption while avoiding the nodes with204
small residual energy.205
In our study, we opt for the preconfigured static routing, in-206
stead of the adaptive on-the-fly routing for three main reasons:207
First, in our study, the sensor nodes are not mobile. Hence,208
the network topology is static, as opposed to typical ad-hoc209
networks, where on-the-fly routing is required to adapt to the210
frequent topological changes.211
The second reason behind using the preconfigured routing212
is the traffic pattern. In our study, we consider continuous-213
monitoring applications, where each node periodically reports214
its data to the sink node. The amount of information generated215
by each sensor node is therefore known a priori, as opposed216
to event-driven applications, where the generated information217
at each sensor node is not known a priori since it depends on218
the arbitrary occurrence of specific events. In such event-driven219
WSNs, it may be useful to make routing decisions on the fly for220
each occurring event by considering the current network state221
(i.e., the residual energy at each sensor node). However, this is222
not required in our targeted continuous-monitoring networks.223
To be more precise, it is not recommended for the third reason224
given here.225
Performing on-the-fly routing for each generated information226
induces considerable exchange of signaling messages. This227
routing scheme requires global and online information about228
the network state in making routing decisions. In computer229
networks where packets are large, the small control packets230
may impose little overhead. However, in WSNs where the231
packet size is small, they constitute a large overhead. This can232
extremely be costly since a large amount of energy has to be233
spent to route the control packets.234
In response to these challenges, we propose our preconfig-235
ured balanced routing scheme. From a performance evalua-236
tion perspective, we develop a model for energy consumption237
that captures the real behavior of WSNs, as opposed to pre-238
vious works, where many simplistic assumptions have been239
considered.240
III. MODEL AND PROBLEM DESCRIPTION241
A. Network Model242
We represent a WSN by directed graph G(V,E), which243
is called a connectivity graph. Each sensor node v ∈ V is244
characterized by a circular transmission range Rt(v) and a245
carrier-sensing range Rh(v) (which is also called the hearing246
range). In our study, we suppose that all the sensor nodes have247
the same transmission and carrier-sensing ranges denoted by248
Rt and Rh, respectively. During the transmission of node v,249
all the nodes inside its carrier-sensing range, which is denoted250
by H(v), sense the channel to be busy and cannot access251
the medium. Hereinafter, we denote by H+(v) = H(v) ∪ {v}252
and H−(v) the set of nodes that node v cannot hear, i.e.,253
H−(v) = V \H+(v).254
On the other hand, during the transmission of node v, all the 255
nodes residing in its transmission range and thus representing 256
its neighborhood denoted by Ne(v) receive the signal from 257
v with a power strength such that correct decoding is possi- 258
ble with high probability. A bidirectional wireless link exists 259
between v and every neighbor u ∈ Ne(v) and is represented 260
by the directed edges (u, v) and (v, u) ∈ E. Note that, the 261
proposed network model assumes the knowledge of sets H(v) 262
andNe(v) for each sensor node v ∈ V . To obtain such inputs in 263
practice, we assume that the cartography of the sensor network 264
is known in advance. 265
We represent the graph connectivity by a connectivity matrix. 266
The connectivity matrix of G(V,E) is a matrix whose rows and 267
columns are labeled by the graph vertices V , with a 1 or a 0 in 268
position (m,n), according to whether vm and vn are directly 269
connected or not. In other words, placing 1 in position (m,n) 270
means that vm and vn are within the transmission range of 271
each other (i.e., the two nodes can communicate). In our study, 272
all the sensor nodes periodically transmit their reports to the 273
sink node, which is denoted by S. Here, we target continuous- 274
monitoring applications, which represent an important class of 275
WSN applications. The average number of reports sent per 276
unit of time by each sensor node v is denoted by A(v). The 277
transmitted packet by v can follow one of the possible paths in 278
graph G(V,E) that connects v to sink node S. The set of paths 279
between vertex v and S is denoted by P (v). 280
In WSNs, the reporting sensor nodes compete to access 281
the common data channel to report their sensing data to the 282
sink nodes. In our study, access to the medium among the 283
competing nodes is arbitrated by the well-known IEEE 802.11- 284
like sensor network protocol [28], [29]. The IEEE 802.11 285
distributed coordination function access method is based on the 286
carrier-sense multiple-access/collision-avoidance (CSMA/CA) 287
technique. Thus, considering IEEE 802.11 in the context of 288
WSNs allows determining a general case study for all WSN 289
protocols based on the CSMA/CA technique. Note that SMAC AQ1290
[4] and TMAC [5] are WSN MAC protocols that rely on the 291
CSMA/CA technique to coordinate the access to the wireless 292
channel between all competing nodes. Thus, our study also 293
remains valid for those WSN MAC protocols. 294
According to the CSMA/CA technique, a host, wishing to 295
transmit a frame, first senses channel activity until an idle 296
period that is equal to distributed interframe space (DIFS) 297
is detected. Then, to avoid collisions, the station waits for a 298
random backoff interval before transmitting. The backoff time 299
counter is decremented in terms of time slots as long as the 300
channel is sensed to be free. The counter is suspended once 301
a transmission is detected on the channel. It resumes with the 302
old remaining backoff interval when the channel is sensed to 303
be idle again for a DIFS period. The station transmits its frame 304
when the backoff time becomes zero. If the frame is correctly 305
received, the receiving host sends an ACK frame after a short 306
interframe space (SIFS). If an ACK is not received by the sender 307
within an ACK timeout, the transmitted frame is supposed to be 308
lost (due to either collision or channel error). 309
In this case, the sending host attempts to send its frame 310
again when the channel is free for a DIFS period augmented 311
by the new backoff, which is sampled according to the binary 312

IEEE
Proo
f
4 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY
exponential backoff (BEB) process. Specifically, for each new313
transmission attempt, the backoff interval is uniformly chosen314
from the range [0, CW ] in terms of time slots. At the first315
transmission attempt of a frame, CW is equal to the initial316
backoff window size CWmin. Following each unsuccessful317
transmission,CW is doubled until a maximum backoff window318
size value CWmax is reached. Once the frame is successfully319
transmitted, the CW value is reset to CWmin.320
In our analysis, we assume that there is no limit on theAQ2 321
number of retransmissions over a link. Hence, a packet is never322
discarded by a node and continues to be retransmitted until it is323
successfully delivered.324
The procedure previously described is referred to as the325
basic access mode. An optional request-to-send (RTS)/clear-326
to-send (CTS) mechanism can also be used to avoid collision327
among data packets due to the hidden terminal problem [30],328
[31]. Using the RTS/CTS mechanism, collisions still occur but329
among the small RTS frames, instead of the relatively large data330
packets. However, the actual payload of a data packet in WSNs331
is usually small. For instance, the CC2420 low-cost transceiver332
[32] has a transmit buffer of 128 B and a data packet payload333
of 30–50 B. For this reason, the RTS/CTS mechanism is usu-334
ally disabled in WSNs. Moreover, it was shown in [33] that335
RTS/CTS increases the overhead without really improving the336
network performance. In view of this, we consider the basic ac-337
cess mode, but the same study with slight modifications can eas-338
ily be adapted to the case where the RTS/CTS option is enabled.339
B. Problem Description340
In this paper, we approach the efficient routing of reports to341
the sink node by balancing the energy consumption throughout342
the network. By doing so, we aim at improving the WSN life-343
time. For each sensor node v, generated reports to the sink can344
follow one of the possible |P (v)| paths. We associate a weight345
w(p) to each path p ∈ P (v), such that∑
p∈P (v) w(p) = 1.346
Vector W (v) = (w(p))p∈P (v) represents the fraction of utiliza-347
tion of each path p ∈ P (v) used to send the traffic from node v348
to the sink node.349
The number of packets per unit of time that go through350
link (u, v) ∈ E is denoted by λ(u, v). It represents the rate of351
packets transmitted by node u to node v. These packets can be352
generated by either u or other sensor nodes and relayed by u to353
attain their final destination (i.e., the sink node). Rate λ(u, v)354
can simply be expressed as follows:355
λ(u, v) =∑k∈V
∑p∈P (k)
w(p) ×A(k) × 1∣∣(u,v)∈p(1)
where 1|(u,v)∈p is the indicator function of the condition that356
link (u, v) belongs to path p. Moreover, the packet rate trans-357
mitted by node u is given by358
λu =∑
n∈Ne(u)
λ(u, n). (2)
Note that (1) is derived by considering the system working359
in the unsaturated regime, which is more likely the case of360
real WSNs. WSNs indeed produce light traffic, compared with 361
traditional wireless networks. Unless explicitly notified, we 362
consider the WSN working under the unsaturated regime in the 363
reminder of this paper. 364
Let us consider a path p ∈ P (v). We denote the average 365
energy consumed by node u due to the successful delivery of a 366
packet transmitted by v to the sink node through path p.E(u, p) 367
includes only the energy consumed in transmission or reception 368
(i.e., it does not include the energy consumed by a sensor node 369
during the idle state). The average amount of energy consumed 370
by node u per unit of time due to the different transmissions 371
inside the WSN, which is denoted by E(u), can therefore be 372
expressed as follows: 373
E(u) = Eidle(u) +∑v∈V
∑p∈P (v)
w(p) ×A(v) × E(u, p) (3)
where Eidle(u) is the average amount of energy consumed by 374
node u per unit of time during its idle state. The lifetime of 375
sensor node u is then given by 376
T (u) =Einit
E(u)(4)
where Einit is the initial amount of energy provided to each 377
sensor node. 378
The network lifetime is defined as the time spent from the 379
deployment until the drain of the first sensor node. Hence, 380
to maximize the network lifetime, we have to maximize the 381
lifetime of the greediest node in the network in terms of energy 382
consumption. The problem then consists of minimizing the 383
following function: 384
maxW
T (u) = minW
(maxu∈V
E(u)). (5)
Indeed, to maximize the network lifetime, we have to avoid 385
the fast drain of sensor nodes with high energy consumption. 386
We therefore need to balance the energy consumption inside the 387
network by efficiently routing the data packets. This is achieved 388
by determining the optimal set of vectors (W (v))v∈V = W that 389
enables to minimize the energy consumption of the greediest 390
sensor nodes to maximize the network lifetime. 391
C. Motivating Balanced Routing Through an Example 392
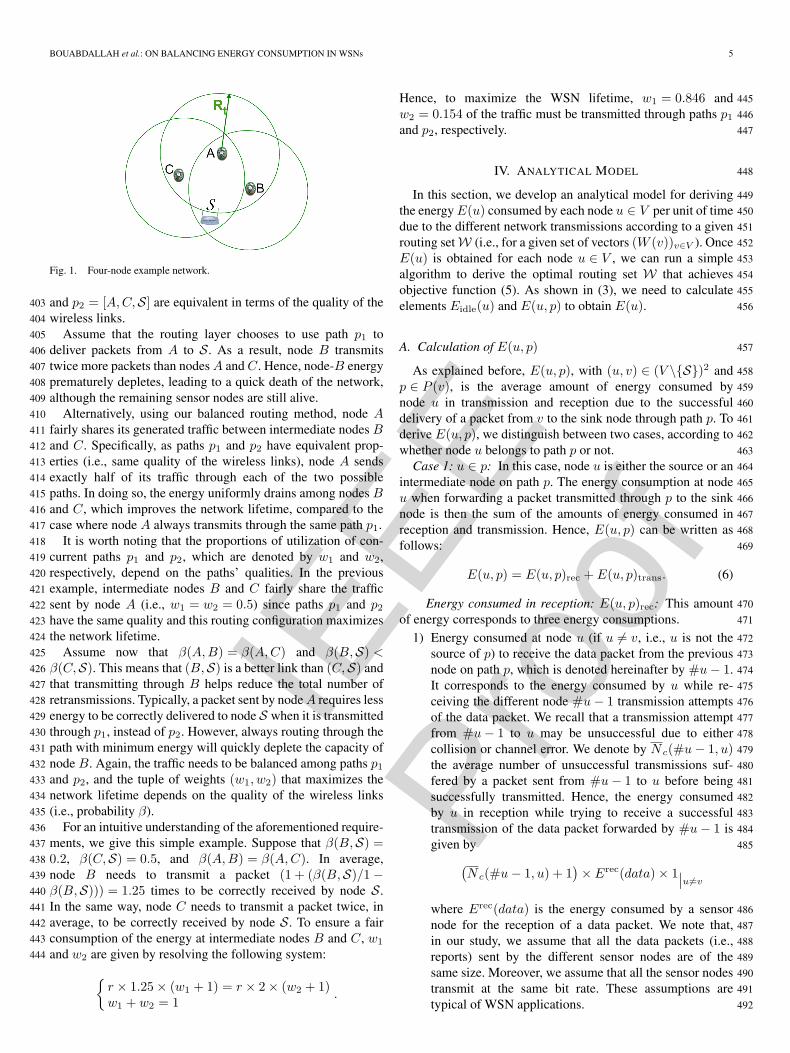
Consider the sample scenario shown in Fig. 1, where each 393
sensor node among A, B, and C transmits r reports per unit of 394
time to sink node S. Nodes B and C directly transmit their data 395
packets to S since S is within the B and C transmission ranges. 396
On the other hand, node A has to transmit through B or C to 397
reach S. 398
We denote by (1 − β(A,B)) the packet delivery success 399
probability from A to B. β(A,B) represents the quality of the 400
wireless link between nodes A and B. Assume that β(A,B) = 401
β(A,C) = β(B,S) = β(C,S). As such, paths p1 = [A,B,S] 402
IEEE
Proo
f
BOUABDALLAH et al.: ON BALANCING ENERGY CONSUMPTION IN WSNs 5
Fig. 1. Four-node example network.
and p2 = [A,C,S] are equivalent in terms of the quality of the403
wireless links.404
Assume that the routing layer chooses to use path p1 to405
deliver packets from A to S. As a result, node B transmits406
twice more packets than nodesA andC. Hence, node-B energy407
prematurely depletes, leading to a quick death of the network,408
although the remaining sensor nodes are still alive.409
Alternatively, using our balanced routing method, node A410
fairly shares its generated traffic between intermediate nodes B411
and C. Specifically, as paths p1 and p2 have equivalent prop-412
erties (i.e., same quality of the wireless links), node A sends413
exactly half of its traffic through each of the two possible414
paths. In doing so, the energy uniformly drains among nodes B415
and C, which improves the network lifetime, compared to the416
case where node A always transmits through the same path p1.417
It is worth noting that the proportions of utilization of con-418
current paths p1 and p2, which are denoted by w1 and w2,419
respectively, depend on the paths’ qualities. In the previous420
example, intermediate nodes B and C fairly share the traffic421
sent by node A (i.e., w1 = w2 = 0.5) since paths p1 and p2422
have the same quality and this routing configuration maximizes423
the network lifetime.424
Assume now that β(A,B) = β(A,C) and β(B,S) <425
β(C,S). This means that (B,S) is a better link than (C,S) and426
that transmitting through B helps reduce the total number of427
retransmissions. Typically, a packet sent by nodeA requires less428
energy to be correctly delivered to node S when it is transmitted429
through p1, instead of p2. However, always routing through the430
path with minimum energy will quickly deplete the capacity of431
node B. Again, the traffic needs to be balanced among paths p1432
and p2, and the tuple of weights (w1, w2) that maximizes the433
network lifetime depends on the quality of the wireless links434
(i.e., probability β).435
For an intuitive understanding of the aforementioned require-436
ments, we give this simple example. Suppose that β(B,S) =437
0.2, β(C,S) = 0.5, and β(A,B) = β(A,C). In average,438
node B needs to transmit a packet (1 + (β(B,S)/1 −439
β(B,S))) = 1.25 times to be correctly received by node S.440
In the same way, node C needs to transmit a packet twice, in441
average, to be correctly received by node S. To ensure a fair442
consumption of the energy at intermediate nodes B and C, w1443
and w2 are given by resolving the following system:444
{r × 1.25 × (w1 + 1) = r × 2 × (w2 + 1)w1 + w2 = 1
.
Hence, to maximize the WSN lifetime, w1 = 0.846 and 445
w2 = 0.154 of the traffic must be transmitted through paths p1 446
and p2, respectively. 447
IV. ANALYTICAL MODEL 448
In this section, we develop an analytical model for deriving 449
the energyE(u) consumed by each node u ∈ V per unit of time 450
due to the different network transmissions according to a given 451
routing set W (i.e., for a given set of vectors (W (v))v∈V ). Once 452
E(u) is obtained for each node u ∈ V , we can run a simple 453
algorithm to derive the optimal routing set W that achieves 454
objective function (5). As shown in (3), we need to calculate 455
elements Eidle(u) and E(u, p) to obtain E(u). 456
A. Calculation of E(u, p) 457
As explained before, E(u, p), with (u, v) ∈ (V \{S})2 and 458
p ∈ P (v), is the average amount of energy consumed by 459
node u in transmission and reception due to the successful 460
delivery of a packet from v to the sink node through path p. To 461
derive E(u, p), we distinguish between two cases, according to 462
whether node u belongs to path p or not. 463
Case 1: u ∈ p: In this case, node u is either the source or an 464
intermediate node on path p. The energy consumption at node 465
u when forwarding a packet transmitted through p to the sink 466
node is then the sum of the amounts of energy consumed in 467
reception and transmission. Hence, E(u, p) can be written as 468
follows: 469
E(u, p) = E(u, p)rec + E(u, p)trans. (6)
Energy consumed in reception: E(u, p)rec: This amount 470
of energy corresponds to three energy consumptions. 471
1) Energy consumed at node u (if u �= v, i.e., u is not the 472
source of p) to receive the data packet from the previous 473
node on path p, which is denoted hereinafter by #u− 1. 474
It corresponds to the energy consumed by u while re- 475
ceiving the different node #u− 1 transmission attempts 476
of the data packet. We recall that a transmission attempt 477
from #u− 1 to u may be unsuccessful due to either 478
collision or channel error. We denote by N c(#u− 1, u) 479
the average number of unsuccessful transmissions suf- 480
fered by a packet sent from #u− 1 to u before being 481
successfully transmitted. Hence, the energy consumed 482
by u in reception while trying to receive a successful 483
transmission of the data packet forwarded by #u− 1 is 484
given by 485(N c(#u− 1, u) + 1
)× Erec(data) × 1∣∣u�=v
where Erec(data) is the energy consumed by a sensor 486
node for the reception of a data packet. We note that, 487
in our study, we assume that all the data packets (i.e., 488
reports) sent by the different sensor nodes are of the 489
same size. Moreover, we assume that all the sensor nodes 490
transmit at the same bit rate. These assumptions are 491
typical of WSN applications. 492

IEEE
Proo
f
6 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY
In turn, N c(#u− 1, u) can be calculated as follows:493
Let Nc(#u− 1, u) be a random variable representing494
the number of unsuccessful transmissions experienced495
by a packet before being successfully transmitted from496
#u− 1 to u. We denote by β(#u− 1, u) the probability497
that a transmission attempt from #u− 1 to u is unsuc-498
cessful. Nc(#u− 1, u) is a geometric random variable,499
and thus, we have500
E [Nc(#u−1, u)]=N c(#u−1, u) =β(#u−1, u)
1−β(#u−1, u). (7)
In the next section, we will show how to derive the501
probability β(#u− 1, u).502
2) The second amount of energy consumed by node u503
in reception is the energy consumed while overhear-504
ing unintended data transmissions. It corresponds to the505
data transmissions that are not intended for node u506
and performed by nodes inside its carrier-sensing range507
while relaying the packet transmitted on path p to508
its final destination. Such set of nodes is denoted by509
Z(u, p) = {k ∈ V/k ∈ H(u) ∩ p}. Each of the node k ∈510
(Z(u, p)\{#u− 1}) transmissions is overheard by node511
u and induces the following energy consumption at u:512 (N c(k,#k + 1) + 1
)× Erec(data)
where #k + 1 denotes the subsequent node to k on513
path p.514
3) The third amount of energy consumed by node u in515
reception is the energy spent while receiving an ACK516
frame from the next node (downstream node) on path p517
(i.e., from node #u+ 1) or overhearing unintended ACK518
frames sent by the other intermediate nodes on path p.519
Hence, the total amount of energy consumed by node u520
in reception during the delivery of a packet to the sink node521
through path p is given by522
E(u, p)rec =∑
k∈Z(u,p)
[ (N c(k,#k + 1) + 1
)
×Erec(data) + Erec(ACK) × 1∣∣k �=v
]. (8)
Note that, in our study, we assume that ACK frames are not523
subject to collision. To justify such assumption, let us first recall524
that following a correct transmission of a data packet through525
wireless link (u, v) (i.e., the data packet is correctly received526
by node v), the ACK message may not correctly be delivered to527
node u due to the reason given here.528
• A collision occurs at node u when receiving the ACK529
message, i.e., the ACK signal overlaps with other trans-530
missions at node u. This improbable event occurs when531
node v and a hidden node from v within the interfer-532
ence range of u (which is denoted hereinafter by n, n ∈533
H−(v) ∩H(u)) transmit at the same time. Note that such534
case happens if node n accesses the medium during the535
period of SIFS + tACK. In other words, if the backoff536
counter of node n expires during the SIFS + tACK period537
of time, then a collision on the ACK frame is perceived by 538
node u. Recall that, after the completion of u’s DATA 539
packet transmission, all the nodes in H−(v) ∩H(u) 540
will resume their access after DIFS + Backoff (see 541
Section III-A). Therefore, an ACK’s collision at u happens 542
only if DIFS + Backoff < SIFS + tACK. Considering the 543
scarcity of such event, we have neglected collisions on the 544
ACK frames. 545
Energy consumed in transmission: E(u, p)trans: This 546
amount of energy corresponds to two energy consumptions. 547
1) Energy consumed by node u during the different attempts 548
to successfully transmit the data packet to node #u+ 1. 549
It is simply given by 550(N c(u,#u+ 1) + 1
)× Etrans(data)
where Etrans(data) is the energy consumed by a sensor 551
node for the transmission of a data packet. 552
2) Energy consumed by node u (if u �= v, i.e., u is not the 553
source of p) to transmit an ACK frame to node #u− 1. 554
The total amount of energy consumed by node u in transmis- 555
sion is therefore given by 556
E(u, p)trans =(N c(u,#u+ 1) + 1
)× Etrans(data)
+ Etrans(ACK) × 1∣∣u�=v. (9)
Case 2: u /∈ p: In this case, we calculate the energy possibly 557
consumed by u due to the successful delivery of a packet 558
through path p, although u /∈ p. It is the energy that u may 559
consume due to the reception of signals that are not necessarily 560
intended for u, i.e., the signals transmitted by neighboring 561
nodes to u that participate in forwarding the data packet on p. 562
To calculate this amount of energy, let us consider again the set 563
Z(u, p) = {k ∈ V/k ∈ H(u) ∩ p}. This set of nodes simply 564
corresponds to nodes that jointly belong to path p and within 565
the node-u carrier-sensing range. These nodes, whose transmis- 566
sions are heard by node u, participate in the transmission of 567
the data packet through p. Specifically, each node k ∈ Z(u, p) 568
induces two energy consumptions at node u. 569
1) Energy consumed by node uwhile overhearing the differ- 570
ent transmission attempts of the data packet from node k 571
to node #k + 1 of path p. This amount of energy can be 572
expressed as follows: 573(N c(k,#k + 1) + 1
)× Erec(data).
2) Energy consumed by node u while listening to the ACK 574
frame sent by node k to node #k − 1 on path p, if k is 575
not the source of p. 576
Hence, the total amount of energy consumed by node u, 577
which does not belong to p, due to the transmission of a packet 578
through path p is given by 579
E(u, p) =∑
k∈Z(u,p)
[ (N c(k,#k + 1) + 1
)× Erec(data)
+ Erec(ACK) × 1∣∣k �=source(p)
]. (10)

IEEE
Proo
f
BOUABDALLAH et al.: ON BALANCING ENERGY CONSUMPTION IN WSNs 7
B. Calculation of Eidle(u)580
It is the energy consumed by node u in the idle state and the581
energy dissipated by node u when it is neither transmitting nor582
receiving (i.e., while listening to the idle channel). Eidle(u) can583
be expressed as follows:584
Eidle(u) = 1 −∑v∈V
∑p∈P (v)
w(p) ×A(v)
×[ ∑
k∈Z(u,p)
[N c(k,#k + 1)Tdata + TACK × 1|k �=v
]
+[N c(u,#u+ 1)Tdata + TACK × 1|u�=v
]× 1|u∈p
]
(11)
where Eidle is the amount of energy consumed per unit of585
time by a sensor node in the idle state, and Tdata and TACK586
are the transmission times of data reports and ACK messages,587
respectively. Note that (11) is always positive since we consider588
the unsaturated regime.589
Finally, by substituting (6), (10), and (11) into (3), we obtain590
the amount of energy E(u) consumed by each node u ∈ V591
per unit of time due to the different network transmissions592
according to a given routing set W . It is easy to see that the593
only unknown variable that remains to be calculated to obtain594
E(u) is β(k, n)∀(k, n) ∈ V 2.595
C. Calculation of β(u, v)596
Let us consider edge (u, v) ∈ E. As stated before, β(u, v) is597
defined as the probability of a transmission attempt from u to v598
to be unsuccessful due to either collision or channel error.599
In our study, the access to the medium is arbitrated by600
the well-known IEEE 802.11-like sensor network protocol. In601
the following, we derive probability β(u, v), considering the602
basic access mode case (i.e., Data/ACK). The same calculation603
methodology can simply be adapted to derive β(u, v) in the604
RTS/CTS-based access mode case.605
We note that various studies in the literature addressed the606
calculation of β(u, v), considering simplistic assumptions and607
particular network topologies [34]–[36]. Specifically, Bianchi608
[36] assumed that the network operates under saturation con-609
ditions, i.e., the transmission queue of each node is assumed610
to be always nonempty. In addition, Bianchi [36] assumed that611
all the nodes are within each others’ carrier-sensing range (i.e.,612
no hidden terminals). Medepalli and Tobagi [34] and Garetto613
[35] extended the calculation of β(u, v) for the multihop case614
with finite load. However, simplistic assumptions still need to615
be accounted for. For instance, the authors assumed that each616
node always transmits to the same neighbor, regardless of the617
packets’ source and destination nodes. As such, each sensor618
node transmits through a single fixed route to the sink node,619
and all the routes to the sink form a set of trees where the root620
is the sink node and the sensors are the leaf nodes.621
This assumption is impractical in WSNs, where routes622
change over time since the WSN topology changes, due to the623
drain of sensor nodes. In addition, the assumption considered624
in [34] is incompatible with the balanced routing philosophy,625
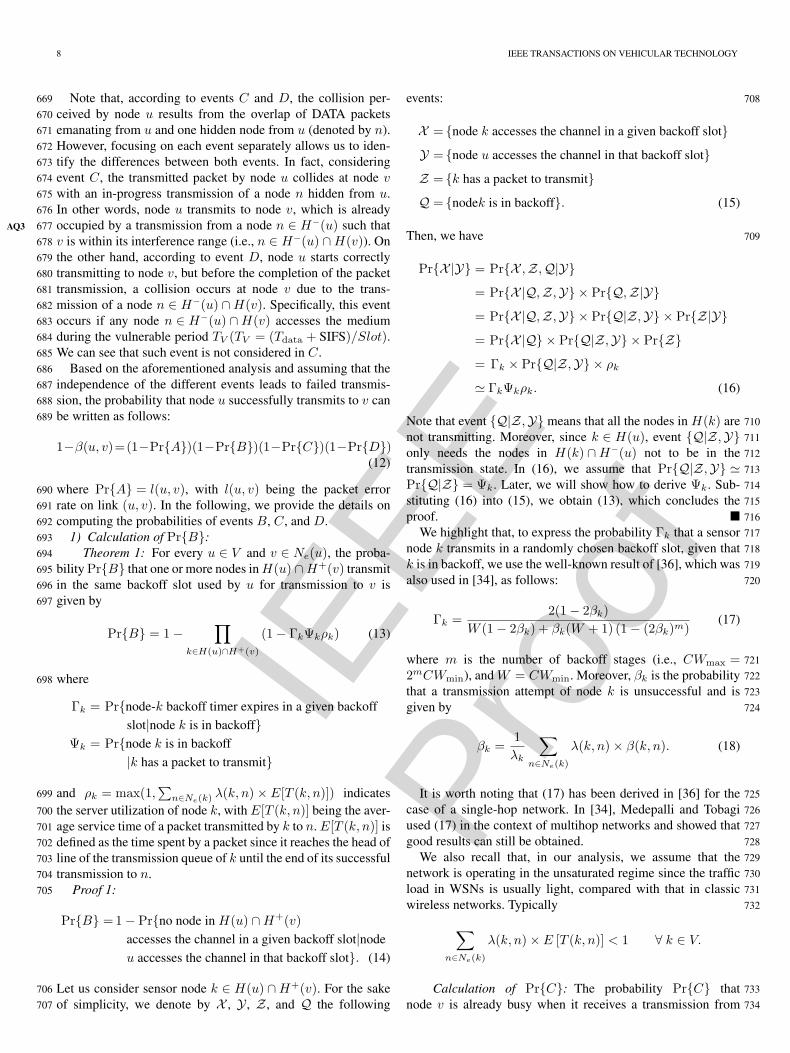
Fig. 2. Node n as a hidden node to node u.
which allows the traffic generated by each sensor node to 626
be bifurcated over different weighted routes to improve the 627
network lifetime. 628
To alleviate the aforementioned limitations, we recalculate 629
β(u, v), considering a general case by extending the works in 630
[34] and [36]. We follow the same philosophy used in [34] and 631
[36] since it yields very good results. This modeling approach 632
dictates the consideration of the different events arbitrating the 633
channel access for each node. The probabilities of these events 634
are then related in terms of each other through fixed-point 635
equations, which can be solved using numerical techniques. 636
Due to the complexity of solving such equations, we provide 637
hereinafter only the framework for deriving these equations. In 638
the performance evaluation section, we instead use simulations 639
to calculate β(u, v). 640
Let us consider Fig. 2. A transmission from node u is 641
unsuccessfully received by node v if one or more of four events 642
occur. 643
1) A: A packet error occurs during the transmission on 644
wireless link (u, v). 645
2) B: One or more sensor nodes, within both the carrier- 646
sensing ranges of u and v, transmit in the same backoff 647
slot as u. 648
3) C: Node u transmits while v is already busy with the 649
transmission of hidden nodes from u. For instance, as- 650
sume that node n is transmitting a packet to node v, as 651
shown in Fig. 2. Node n is outside the carrier-sensing 652
range of node u (i.e., n is a hidden node from u). As such, 653
node u still senses the channel to be idle and can transmit 654
a packet to v during node-n transmission. If this happens, 655
the newly arriving packet from u cannot be received by v 656
since it is already busy. Effectively, the packet from u to 657
v experiences a collision. 658
4) D: Node v receives transmissions from hidden nodes 659
from u, whereas the transmission of the latter is still 660
in progress. Typically, if, during the packet transmission 661
from u to v plus SIFS (also called the vulnerable period), 662
node n transmits a packet to any of its neighboring nodes, 663
the receiving node v will not return an ACK frame to u. 664
Node u therefore considers the packet as unsuccessfully 665
transmitted and schedules for a retransmission later. We 666
note that, in our analytical model, we do not consider the 667
signal capture property. 668
IEEE
Proo
f
8 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY
Note that, according to events C and D, the collision per-669
ceived by node u results from the overlap of DATA packets670
emanating from u and one hidden node from u (denoted by n).671
However, focusing on each event separately allows us to iden-672
tify the differences between both events. In fact, considering673
event C, the transmitted packet by node u collides at node v674
with an in-progress transmission of a node n hidden from u.675
In other words, node u transmits to node v, which is already676
occupied by a transmission from a node n ∈ H−(u) such thatAQ3 677
v is within its interference range (i.e., n ∈ H−(u) ∩H(v)). On678
the other hand, according to event D, node u starts correctly679
transmitting to node v, but before the completion of the packet680
transmission, a collision occurs at node v due to the trans-681
mission of a node n ∈ H−(u) ∩H(v). Specifically, this event682
occurs if any node n ∈ H−(u) ∩H(v) accesses the medium683
during the vulnerable period TV (TV = (Tdata + SIFS)/Slot).684
We can see that such event is not considered in C.685
Based on the aforementioned analysis and assuming that the686
independence of the different events leads to failed transmis-687
sion, the probability that node u successfully transmits to v can688
be written as follows:689
1−β(u, v)=(1−Pr{A})(1−Pr{B})(1−Pr{C})(1−Pr{D})(12)
where Pr{A} = l(u, v), with l(u, v) being the packet error690
rate on link (u, v). In the following, we provide the details on691
computing the probabilities of events B, C, and D.692
1) Calculation of Pr{B}:693
Theorem 1: For every u ∈ V and v ∈ Ne(u), the proba-694
bility Pr{B} that one or more nodes inH(u) ∩H+(v) transmit695
in the same backoff slot used by u for transmission to v is696
given by697
Pr{B} = 1 −∏
k∈H(u)∩H+(v)
(1 − ΓkΨkρk) (13)
where698
Γk = Pr{node-k backoff timer expires in a given backoff
slot|node k is in backoff}Ψk = Pr{node k is in backoff
|k has a packet to transmit}
and ρk = max(1,∑
n∈Ne(k) λ(k, n) × E[T (k, n)]) indicates699
the server utilization of node k, with E[T (k, n)] being the aver-700
age service time of a packet transmitted by k to n.E[T (k, n)] is701
defined as the time spent by a packet since it reaches the head of702
line of the transmission queue of k until the end of its successful703
transmission to n.704
Proof 1:705
Pr{B} = 1 − Pr{no node in H(u) ∩H+(v)accesses the channel in a given backoff slot|node
u accesses the channel in that backoff slot}. (14)
Let us consider sensor node k ∈ H(u) ∩H+(v). For the sake706
of simplicity, we denote by X , Y , Z , and Q the following707
events: 708
X = {node k accesses the channel in a given backoff slot}Y = {node u accesses the channel in that backoff slot}Z = {k has a packet to transmit}Q = {nodek is in backoff}. (15)
Then, we have 709
Pr{X |Y} = Pr{X ,Z,Q|Y}= Pr{X |Q,Z,Y} × Pr{Q,Z|Y}= Pr{X |Q,Z,Y} × Pr{Q|Z,Y} × Pr{Z|Y}= Pr{X |Q} × Pr{Q|Z,Y} × Pr{Z}= Γk × Pr{Q|Z,Y} × ρk
� ΓkΨkρk. (16)
Note that event {Q|Z,Y} means that all the nodes in H(k) are 710
not transmitting. Moreover, since k ∈ H(u), event {Q|Z,Y} 711
only needs the nodes in H(k) ∩H−(u) not to be in the 712
transmission state. In (16), we assume that Pr{Q|Z,Y} � 713
Pr{Q|Z} = Ψk. Later, we will show how to derive Ψk. Sub- 714
stituting (16) into (15), we obtain (13), which concludes the 715
proof. � 716
We highlight that, to express the probability Γk that a sensor 717
node k transmits in a randomly chosen backoff slot, given that 718
k is in backoff, we use the well-known result of [36], which was 719
also used in [34], as follows: 720
Γk =2(1 − 2βk)
W (1 − 2βk) + βk(W + 1) (1 − (2βk)m)(17)
where m is the number of backoff stages (i.e., CWmax = 721
2mCWmin), and W = CWmin. Moreover, βk is the probability 722
that a transmission attempt of node k is unsuccessful and is 723
given by 724
βk =1λk
∑n∈Ne(k)
λ(k, n) × β(k, n). (18)
It is worth noting that (17) has been derived in [36] for the 725
case of a single-hop network. In [34], Medepalli and Tobagi 726
used (17) in the context of multihop networks and showed that 727
good results can still be obtained. 728
We also recall that, in our analysis, we assume that the 729
network is operating in the unsaturated regime since the traffic 730
load in WSNs is usually light, compared with that in classic 731
wireless networks. Typically 732
∑n∈Ne(k)
λ(k, n) × E [T (k, n)] < 1 ∀ k ∈ V.
Calculation of Pr{C}: The probability Pr{C} that 733
node v is already busy when it receives a transmission from 734
fbouabda
Barrer
IEEE
Proo
f
BOUABDALLAH et al.: ON BALANCING ENERGY CONSUMPTION IN WSNs 9
u can be written as follows:735
Pr{C} = Pr{node v is already busy|node u accesses
the channel to transmits to v}= Pr{node v is busy only due
to nodes hidden from u}= Pr{node v is busy only due to nodes hidden from
u | v is busy} × Pr{v is busy}. (19)
The first element of the expression of Pr{C} is typically the736
fraction of access attempts from only the nodes hidden from u737
to all the nodes in H+(v). Hence, we obtain738
Pr{node v is busy only due to
nodes hidden from u|v is busy}
=
[1−
∏k∈H−(u)∩H(v)
(1−αk)
] ∏k∈H+(u)∩H+(v)
(1−αk)
[1−
∏k∈H+(v)
(1−αk)
] (20)
where αk is the probability that node k transmits on the medium739
in a given slot. To derive αk, let us define the following events:740
X = {node k backoff timer expires in a given slot}Y = {node k is in backoff}Z = {k has a packet to transmit}.
Then, αk can be expressed as follows:741
αk = Pr{X |Y} × Pr{Y}= Pr{X |Y} × Pr{Y|Z} × Pr{Z}=ΓkΨkρk (21)
where Ψk = Pr{Y|Z} is the fraction of time that node k spends742
in backoff when attempting to successfully transmit a packet.743
Ψk is simply given by744
Ψk =bk
E[Tk](22)
where E[Tk] = (1/λk)∑
n∈Ne(k) λ(k, n) × E[T (k, n)] is the745
average service time of a packet successfully transmitted by746
node k. Moreover, bk = (1/λk)∑
n∈Ne(k) λ(k, n) × b(k, n) is747
the average total time spent by node k in backoff when at-748
tempting to successfully transmit a packet, where b(k, n) is the749
average total time spent by node k in backoff when attempting750
to transmit a packet to n.751
The second element of the expression of Pr{C} can be752
written as follows:753
Pr{v is busy} =1 − Pr{v is not busy}
=1 −∏
k∈H+(v)
δ(v, k) (23)
where δ(v, k) is the probability that v is not occupied by a 754
transmission from k. δ(v, k) is given by 755
δ(v, k) = 1 −∑
n∈Ne(k)
λ(k, n) ×(N c(k, n) + 1
)× Tdata −
∑n∈Ne(k)
λ(n, k) × TACK (24)
where Tdata and TACK are the transmission times of a data 756
packet and an ACK frame, respectively. 757
Finally, substituting (20) and (23) into (19), we obtain the 758
expression of Pr{C}. 759
Calculation of Pr{D}: We denote by TV = (Tdata + 760
SIFS)/Slot the vulnerable period of time, which is expressed 761
in terms of backoff slots, during which the transmission of a 762
hidden node from u and within the carrier-sensing range of 763
v prevents the success of the in-progress transmission from 764
u to v. Hence, the probability Pr{D} that node v receives 765
transmissions from hidden nodes from u while the transmission 766
of node u is still in progress can be derived as follows: 767
Pr{D} =1 − Pr{no node in H−(u) ∩H(v)transmits during TV slots}
=1 −∏
k∈H−(u)∩H(v)
(1 − αk)TV . (25)
Finally, substituting (13), (19), and (25) into (12), we obtain 768
the expression of β(u, v). We can see that the only remaining 769
unknown variable that needs to be calculated to be able to 770
compute β(u, v) is E[T (k, n)], i.e., the average time taken in 771
successfully transmitting a packet from node k to n. 772
D. Calculation of E[T (k, n)] 773
To derive E[T (k, n)], we extend the average cycle analysis 774
proposed in [34] to handle the case in which a node can transmit 775
to all its neighbors. Accordingly, E[T (k, n)] is expressed as 776
follows: 777
E [T (k, n)] = d(k, n) + b(k, n) + s(k, n) + c(k, n). (26)
Here, d(k, n) is the average time taken by a successful trans- 778
mission attempt of a packet from k to n. d(k, n) can simply be 779
given by 780
d(k, n) = d = DIFS + Tdata + SIFS + TACK. (27)
b(k, n) is the average total time spent by node k in backoff when 781
attempting to transmit a packet to n and can be expressed as 782
follows: 783
b(u,#u+ 1) =
[CWm
2× βm(u,#u+ 1)
+m−1∑i=0
CWi
2× βi(u,#u+ 1)
× (1 − β(u,#u+ 1))
]× Slot (28)

IEEE
Proo
f
10 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY
Fig. 3. Markovian chain. (a) The state transition diagram. (b) The transitionprobability matrix.
where we recall that m is the number of backoff stages in the784
BEB, CWi = 2iCWmin (i.e., CWm = CWmax), and Slot is785
the duration of a backoff slot. Recall that, in (28), we assume,786
as in [36], that a packet is never discarded by a node and thus787
continues to be retransmitted until being successfully delivered788
(i.e., there is no retry limit). s(k, n) is the average time taken by789
the successful transmissions of other nodes in H(k) during the790
service of node k packet to node n. c(k, n) is the average time791
taken by the unsuccessful transmissions, regardless whether k is792
involved or not, which suspend the transmission of node k to n.793
To derive s(k, n) and c(k, n), let us consider the state transi-794
tion diagram of the Markov chain and its associated transition795
probability matrix shown in Fig. 3, where states E, F , and G796
are defined here.797
1) E :{A successful transmission is made by798
node k to n|X ,Y .799
2) F :{Unsuccessful transmission is made in H+(k)|X ,Y .800
3) G :{successful transmission is made by nodes other801
than k in H+(k)|X ,Y .802
Here, X and Y represent the following events:803
X = {at least one node in H+(k)has attempted to transmit}Y = {node k has a packet to transmit to n in its queue head}.
804
As shown in Fig. 3, Pi,j is the transition probability from805
states i to j, and Pi is the probability of remaining in the806
same state i, following a new transmission attempt by the nodes807
in H+(k). In our case, we have Pi,j = Pj∀i, j ∈ {E,F,G}808
since the probability of visiting state j, following the next809
transmission attempt by nodes in H+(k), does not depend of810
the current system state. We denote by NF the random variable811
representing the number of unsuccessful transmissions made812
before a successful transmission is achieved again by node k to813
node n. It is the number of times that state F is visited between814
two successive visits of state E. Hence, c(k, n) is given by815
c(k, n) = E[NF ] × d. (29)
In the same way, we obtain 816
s(k, n) = E[NG] × d (30)
where NG is the random variable representing the number 817
of times that state G is visited between two successive visits 818
of state E. In other words, E[NG] is the average number of 819
successful transmissions done by other nodes in H(k) during 820
the service of a packet from k to n. 821
Let Q denote the following event: 822
Q={state E is left between two successive visits of state E}.
Hence, based on [37], we have 823
Pr{NF = i|Q} ={
1 − rF , if i = 0rF × (hF )i−1 × (1 − hF ), otherwise
where rF and hF are given by 824
{rF = ηF + ηG(1 − PG)−1PG,F
hF = PF + PF,G(1 − PG)−1PG,F
with 825
ηF = Pr{The system leaves state E to F |the system has left state E}
=PF
1 − PE
ηG = 1 − ηF = Pr{The system leaves state E to G|the system has left state E}.
Hence, we obtain 826
E[NF |Q]=+∞∑i=1
i×rF ×(hF )i−1×(1−hF )=PF
PE(1−PE).
Then, we have 827
E[NF ]=E[NF |Q]×Pr{Q}=E[NF |Q]×(1−PE)=PF
PE.
(31)
In the same way, we also obtain 828
E[NG] =PG
PE. (32)
According to (31) and (32), we need to derive probabilities PE , 829
PF , and PG to derive E[NF ] and E[NG]. To achieve this, let us 830
define the probabilities θ(k, n) and θ(k) as follows: 831
θ(k, n) = Pr{node k successfully transmits in a given
slot to node n| k has a packet to transmit
to n in its queue head}= (1 − β(k, n)) × Γk × Ψ(k, n) (33)

IEEE
Proo
f
BOUABDALLAH et al.: ON BALANCING ENERGY CONSUMPTION IN WSNs 11
where832
Ψ(k, n) =b(k, n)
E [T (k, n)]. (34)
Moreover, θ(k) is defined as833
θ(k) = Pr{node k successfully transmits in a given slot|k has a packet to transmit}
=1λk
∑n∈Ne(k)
λ(k, n) × θ(k, n). (35)
Let us now derive the probability PF that an unsuccessful834
transmission is made in H+(k), given that at least one node in835
H+(k) has attempted to transmit and that node k has a packet836
to transmit to n in its queue head. Let Z denote the following837
event:838
Z ={
successful transmission is made in H+(k)}.
Hence, PF can be written as follows:839
PF =1 − Pr{Z,X|Y}Pr{X |Y}
=1 − Pr{X |Z,Y} × Pr{Z|Y}Pr{X |Y}
=1 − Pr{Z|Y}Pr{X |Y}
=1 −θ(k, n) +
∑m∈H(k)
θ(m) × ρm
1 −[Γk × Ψ(k, n) ×
∏m∈H(k)
(1 − αm)
] . (36)
In the same way, we obtain PG given by840
PG =
∑m∈H(H)
θ(m) × ρm
1 −[Γk × Ψ(k, n) ×
∏m∈H(k)(1 − αm)
] . (37)
Finally, PE is simply given by PE = 1 − PF − PG. Then,841
substituting (27)–(30) into (26), we obtain the expression of842
E[T (k, n)].843
V. PERFORMANCE EVALUATION844
In this section, we present the performance evaluation results.845
We first analyze the results regarding our balanced routing846
algorithms. We study the impact of traffic balancing on both847
the packet delivery success probability over the WSN links848
and on the energy consumption at each sensor node. Building849
on these results, we provide the optimal routing configuration850
that maximizes the network lifetime using simple illustration851
networks. The results are derived using both analytical and852
simulation approaches. A simulation model has been developed853
using ns-2 [38] to calculate the probability of unsuccessful854
transmission on each link (i.e., β) according to the routing con-855
TABLE IPARAMETER SETTING
Fig. 4. Simple seven-node multihop WSN.
figuration. Then, the analytical framework in Section IV-A-1. 856
is used to calculate the energy consumption at each sensor node. 857
In our study, we use the hop-based spanning trees (HSTs) 858
[39], [40] and expected transmission count (ETX)-based span- 859
ning trees (ETX) [41] as baselines to which the balanced 860
routing improvements can be compared. Both baselines take 861
advantage of the global information of the network state to 862
make routing decisions. Specifically, the HST protocol uses 863
flooding to select the shortest path in terms of the hop count. 864
This technique may lead to the use of slow and unreliable 865
links. The ETX protocol alleviates this issue since it takes 866
into account the quality of the wireless links in the routing 867
operation. Typically, each link in the network is assigned an 868
ETX cost metric to indicate its quality. 869
In our model, the sensor nodes achieve continuous moni- 870
toring of the supervised area. Each sensor node periodically 871
reports with rate A the local data to one of the existing sink 872
nodes over several hops. At each hop, the traffic originating 873
from the local sensor must be merged with route-through traffic. 874
The access to the data channel is arbitrated by the IEEE 802.11- 875
like sensor network protocol. The parameters setting in our 876
analysis are listed in Table I. 877
A. Impact of the Routing Decision on the Quality of the 878
Wireless Links and the Energy Consumption 879
In this section, we use a simple seven-node multihop WSN, 880
as shown in Fig. 4, to illustrate the impact of the traffic distribu- 881
tion inside the network on the packet delivery success probabil- 882
ity over the WSN links and on the energy efficiency. Recall that 883
the increase in the probability of a failed transmission β(u, v) 884
on a link (u, v) increases the number of retransmissions, which 885
amplifies the energy wastage. 886
In Fig. 4, the distance between consecutive nodes is fixed to 887
10 m, the transmission range of each sensor node is 12 m, and 888
the carrier-sensing range is 24 m. Nodes 2, 4, and 7 play the 889
IEEE
Proo
f
12 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY
TABLE IICOLLISIONS AND ENERGY CONSUMPTION IN A
SEVEN-NODE MULTIHOP WSN
role of sink nodes. Assume that only nodes 1 and 5 monitor the890
supervised area and periodically send their reports to one of the891
sink nodes with rates A = 20 reports/s and A = 0.5 reports/s,892
respectively. Straightforwardly, node 1 reports its data to sink893
node 2, and node 5 can report its data to either node 4 or894
node 7.895
One can presume that node-5 reporting through either896
p1 = [5, 4] or p2 = [5, 6, 7] is always performed without any897
collisions with regard to the transmissions of node 1. In other898
words, one may think that transmitting through route p1 =899
[5, 4] or p2 = [5, 6, 7] is collision free since nodes 4–7 are900
outside the carrier-sensing range of sender node 1. Hence,901
a priori reporting of node-5 data to sink node 4 is a betterAQ4 902
choice since node 5 is only at one hop from node 5 and sink903
node 7 is at two hops from node 5. This, however, is untrue, as904
shown in Table II, which reports the results regarding collisions905
and energy consumption according to whether path p1 or p2 is906
adopted by node 5 to report its data to one of the sink nodes.907
Specifically, if node 5 reports its data to sink node 7,908
collision-free transmission is ensured in all the WSN links, as909
shown in Table II. However, if node 5 chooses to communicate910
with sink node 4, wireless links (1, 2) and (5, 4) suffer from a911
serious problem of collision, as will be explained here.912
Although node 5 is outside the carrier-sensing ranges of both913
sender node 1 and receiver node 2, a node-1 transmission can914
fail due to collision caused by node-5 transmission. How can915
this happen?916
It is worth noting that a collision may occur on link (1, 2)917
(i.e., at receiver node 2) only due to the transmissions of the918
hidden node 4. However, in our scenario, node 4 is a sink919
node and does not generate reports. Nevertheless, it transmits920
ACK frames to node 5. These ACK frames can overlap with921
node-1 transmissions at receiver node 2, thus causing collisions.922
In particular, node-1 transmission to node 2 fails in one of923
two cases.924
1) Node 1 transmits while node 2 is already overhearing an925
ACK frame transmitted from nodes 4 to 5.926
2) Sink node 4 acknowledges node 5 while the transmission927
of node 1 to node 2 is still in progress.928
Typically, if node 1 transmits at t1 a report to node 2,929
∆ units of time after a data transmission from 5 to 4 (i.e., t1 =930
t5 + ∆), with ∆ ∈ [SIFS, Tdata + SIFS + TACK], the node-1931
transmission fails. The ACK frame sent by node 4 to node 5932
will overlap at node 2 with the data packet sent by node 1, and933
a collision is pronounced by node 2 at exactly t1 + ∆′, where934
∆′ = max(Tdata + SIFS − ∆, 0).935
This example is an illustration of the unforeseen collisions936
that may occur in multihop networks due to the well-known937
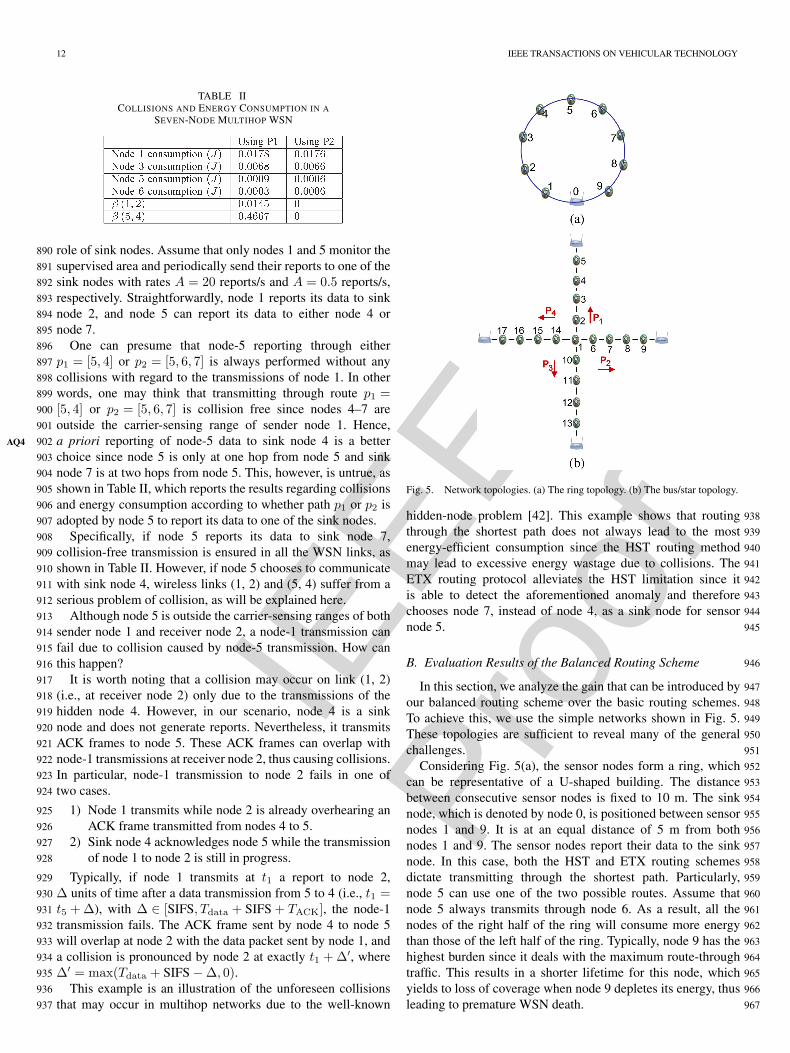
Fig. 5. Network topologies. (a) The ring topology. (b) The bus/star topology.
hidden-node problem [42]. This example shows that routing 938
through the shortest path does not always lead to the most 939
energy-efficient consumption since the HST routing method 940
may lead to excessive energy wastage due to collisions. The 941
ETX routing protocol alleviates the HST limitation since it 942
is able to detect the aforementioned anomaly and therefore 943
chooses node 7, instead of node 4, as a sink node for sensor 944
node 5. 945
B. Evaluation Results of the Balanced Routing Scheme 946
In this section, we analyze the gain that can be introduced by 947
our balanced routing scheme over the basic routing schemes. 948
To achieve this, we use the simple networks shown in Fig. 5. 949
These topologies are sufficient to reveal many of the general 950
challenges. 951
Considering Fig. 5(a), the sensor nodes form a ring, which 952
can be representative of a U-shaped building. The distance 953
between consecutive sensor nodes is fixed to 10 m. The sink 954
node, which is denoted by node 0, is positioned between sensor 955
nodes 1 and 9. It is at an equal distance of 5 m from both 956
nodes 1 and 9. The sensor nodes report their data to the sink 957
node. In this case, both the HST and ETX routing schemes 958
dictate transmitting through the shortest path. Particularly, 959
node 5 can use one of the two possible routes. Assume that 960
node 5 always transmits through node 6. As a result, all the 961
nodes of the right half of the ring will consume more energy 962
than those of the left half of the ring. Typically, node 9 has the 963
highest burden since it deals with the maximum route-through 964
traffic. This results in a shorter lifetime for this node, which 965
yields to loss of coverage when node 9 depletes its energy, thus 966
leading to premature WSN death. 967
IEEE
Proo
f
BOUABDALLAH et al.: ON BALANCING ENERGY CONSUMPTION IN WSNs 13
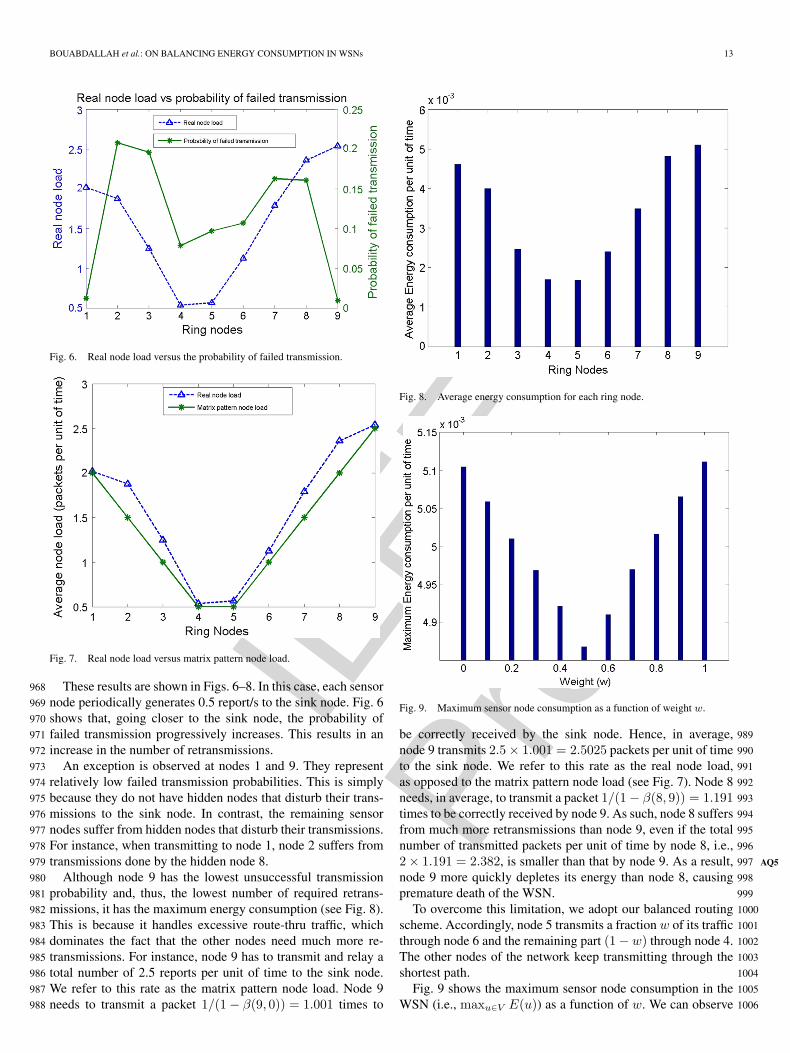
Fig. 6. Real node load versus the probability of failed transmission.
Fig. 7. Real node load versus matrix pattern node load.
These results are shown in Figs. 6–8. In this case, each sensor968
node periodically generates 0.5 report/s to the sink node. Fig. 6969
shows that, going closer to the sink node, the probability of970
failed transmission progressively increases. This results in an971
increase in the number of retransmissions.972
An exception is observed at nodes 1 and 9. They represent973
relatively low failed transmission probabilities. This is simply974
because they do not have hidden nodes that disturb their trans-975
missions to the sink node. In contrast, the remaining sensor976
nodes suffer from hidden nodes that disturb their transmissions.977
For instance, when transmitting to node 1, node 2 suffers from978
transmissions done by the hidden node 8.979
Although node 9 has the lowest unsuccessful transmission980
probability and, thus, the lowest number of required retrans-981
missions, it has the maximum energy consumption (see Fig. 8).982
This is because it handles excessive route-thru traffic, which983
dominates the fact that the other nodes need much more re-984
transmissions. For instance, node 9 has to transmit and relay a985
total number of 2.5 reports per unit of time to the sink node.986
We refer to this rate as the matrix pattern node load. Node 9987
needs to transmit a packet 1/(1 − β(9, 0)) = 1.001 times to988
Fig. 8. Average energy consumption for each ring node.
Fig. 9. Maximum sensor node consumption as a function of weight w.
be correctly received by the sink node. Hence, in average, 989
node 9 transmits 2.5 × 1.001 = 2.5025 packets per unit of time 990
to the sink node. We refer to this rate as the real node load, 991
as opposed to the matrix pattern node load (see Fig. 7). Node 8 992
needs, in average, to transmit a packet 1/(1 − β(8, 9)) = 1.191 993
times to be correctly received by node 9. As such, node 8 suffers 994
from much more retransmissions than node 9, even if the total 995
number of transmitted packets per unit of time by node 8, i.e., 996
2 × 1.191 = 2.382, is smaller than that by node 9. As a result, AQ5997
node 9 more quickly depletes its energy than node 8, causing 998
premature death of the WSN. 999
To overcome this limitation, we adopt our balanced routing 1000
scheme. Accordingly, node 5 transmits a fraction w of its traffic 1001
through node 6 and the remaining part (1 − w) through node 4. 1002
The other nodes of the network keep transmitting through the 1003
shortest path. 1004
Fig. 9 shows the maximum sensor node consumption in the 1005
WSN (i.e., maxu∈V E(u)) as a function of w. We can observe 1006
IEEE
Proo
f
14 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY
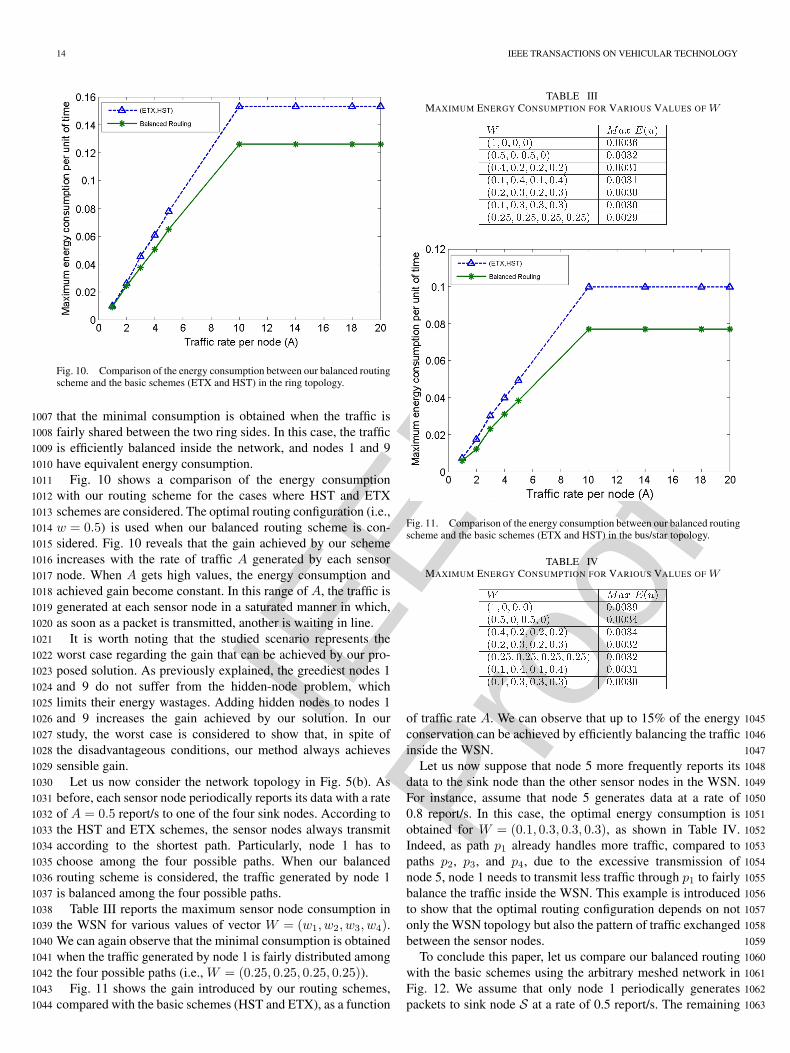
Fig. 10. Comparison of the energy consumption between our balanced routingscheme and the basic schemes (ETX and HST) in the ring topology.
that the minimal consumption is obtained when the traffic is1007
fairly shared between the two ring sides. In this case, the traffic1008
is efficiently balanced inside the network, and nodes 1 and 91009
have equivalent energy consumption.1010
Fig. 10 shows a comparison of the energy consumption1011
with our routing scheme for the cases where HST and ETX1012
schemes are considered. The optimal routing configuration (i.e.,1013
w = 0.5) is used when our balanced routing scheme is con-1014
sidered. Fig. 10 reveals that the gain achieved by our scheme1015
increases with the rate of traffic A generated by each sensor1016
node. When A gets high values, the energy consumption and1017
achieved gain become constant. In this range of A, the traffic is1018
generated at each sensor node in a saturated manner in which,1019
as soon as a packet is transmitted, another is waiting in line.1020
It is worth noting that the studied scenario represents the1021
worst case regarding the gain that can be achieved by our pro-1022
posed solution. As previously explained, the greediest nodes 11023
and 9 do not suffer from the hidden-node problem, which1024
limits their energy wastages. Adding hidden nodes to nodes 11025
and 9 increases the gain achieved by our solution. In our1026
study, the worst case is considered to show that, in spite of1027
the disadvantageous conditions, our method always achieves1028
sensible gain.1029
Let us now consider the network topology in Fig. 5(b). As1030
before, each sensor node periodically reports its data with a rate1031
of A = 0.5 report/s to one of the four sink nodes. According to1032
the HST and ETX schemes, the sensor nodes always transmit1033
according to the shortest path. Particularly, node 1 has to1034
choose among the four possible paths. When our balanced1035
routing scheme is considered, the traffic generated by node 11036
is balanced among the four possible paths.1037
Table III reports the maximum sensor node consumption in1038
the WSN for various values of vector W = (w1, w2, w3, w4).1039
We can again observe that the minimal consumption is obtained1040
when the traffic generated by node 1 is fairly distributed among1041
the four possible paths (i.e., W = (0.25, 0.25, 0.25, 0.25)).1042
Fig. 11 shows the gain introduced by our routing schemes,1043
compared with the basic schemes (HST and ETX), as a function1044
TABLE IIIMAXIMUM ENERGY CONSUMPTION FOR VARIOUS VALUES OF W
Fig. 11. Comparison of the energy consumption between our balanced routingscheme and the basic schemes (ETX and HST) in the bus/star topology.
TABLE IVMAXIMUM ENERGY CONSUMPTION FOR VARIOUS VALUES OF W
of traffic rate A. We can observe that up to 15% of the energy 1045
conservation can be achieved by efficiently balancing the traffic 1046
inside the WSN. 1047
Let us now suppose that node 5 more frequently reports its 1048
data to the sink node than the other sensor nodes in the WSN. 1049
For instance, assume that node 5 generates data at a rate of 1050
0.8 report/s. In this case, the optimal energy consumption is 1051
obtained for W = (0.1, 0.3, 0.3, 0.3), as shown in Table IV. 1052
Indeed, as path p1 already handles more traffic, compared to 1053
paths p2, p3, and p4, due to the excessive transmission of 1054
node 5, node 1 needs to transmit less traffic through p1 to fairly 1055
balance the traffic inside the WSN. This example is introduced 1056
to show that the optimal routing configuration depends on not 1057
only the WSN topology but also the pattern of traffic exchanged 1058
between the sensor nodes. 1059
To conclude this paper, let us compare our balanced routing 1060
with the basic schemes using the arbitrary meshed network in 1061
Fig. 12. We assume that only node 1 periodically generates 1062
packets to sink node S at a rate of 0.5 report/s. The remaining 1063
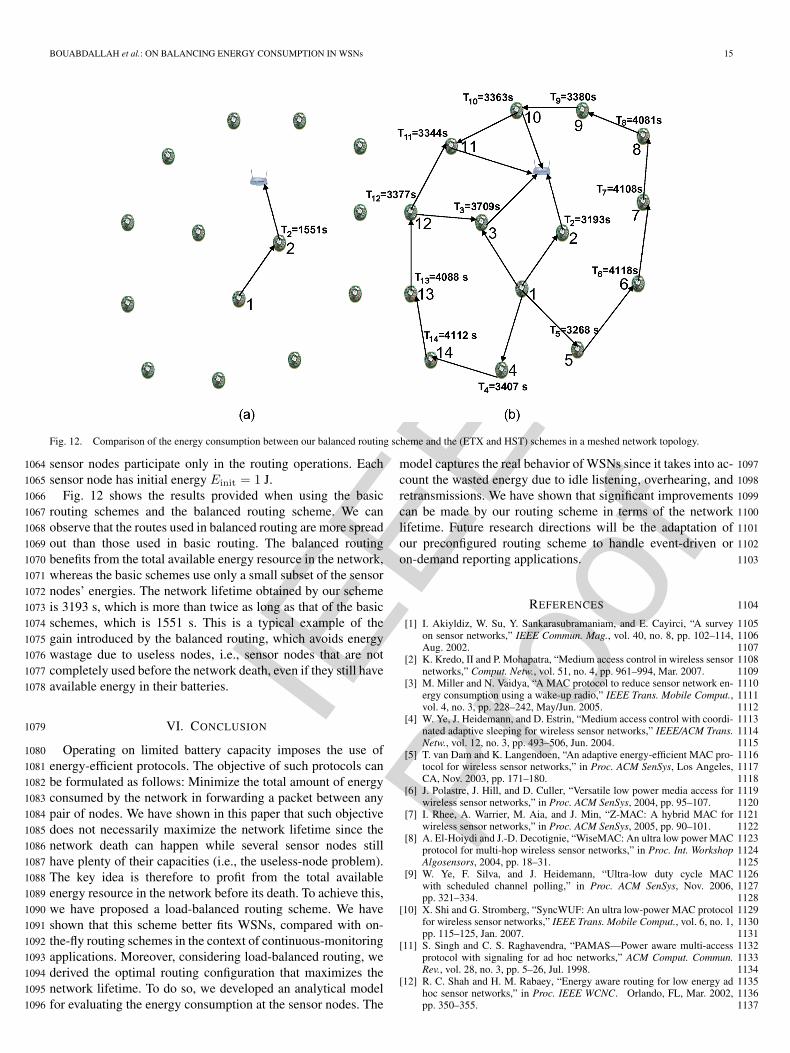
IEEE
Proo
f
BOUABDALLAH et al.: ON BALANCING ENERGY CONSUMPTION IN WSNs 15
Fig. 12. Comparison of the energy consumption between our balanced routing scheme and the (ETX and HST) schemes in a meshed network topology.
sensor nodes participate only in the routing operations. Each1064
sensor node has initial energy Einit = 1 J.1065
Fig. 12 shows the results provided when using the basic1066
routing schemes and the balanced routing scheme. We can1067
observe that the routes used in balanced routing are more spread1068
out than those used in basic routing. The balanced routing1069
benefits from the total available energy resource in the network,1070
whereas the basic schemes use only a small subset of the sensor1071
nodes’ energies. The network lifetime obtained by our scheme1072
is 3193 s, which is more than twice as long as that of the basic1073
schemes, which is 1551 s. This is a typical example of the1074
gain introduced by the balanced routing, which avoids energy1075
wastage due to useless nodes, i.e., sensor nodes that are not1076
completely used before the network death, even if they still have1077
available energy in their batteries.1078
VI. CONCLUSION1079
Operating on limited battery capacity imposes the use of1080
energy-efficient protocols. The objective of such protocols can1081
be formulated as follows: Minimize the total amount of energy1082
consumed by the network in forwarding a packet between any1083
pair of nodes. We have shown in this paper that such objective1084
does not necessarily maximize the network lifetime since the1085
network death can happen while several sensor nodes still1086
have plenty of their capacities (i.e., the useless-node problem).1087
The key idea is therefore to profit from the total available1088
energy resource in the network before its death. To achieve this,1089
we have proposed a load-balanced routing scheme. We have1090
shown that this scheme better fits WSNs, compared with on-1091
the-fly routing schemes in the context of continuous-monitoring1092
applications. Moreover, considering load-balanced routing, we1093
derived the optimal routing configuration that maximizes the1094
network lifetime. To do so, we developed an analytical model1095
for evaluating the energy consumption at the sensor nodes. The1096
model captures the real behavior of WSNs since it takes into ac- 1097
count the wasted energy due to idle listening, overhearing, and 1098
retransmissions. We have shown that significant improvements 1099
can be made by our routing scheme in terms of the network 1100
lifetime. Future research directions will be the adaptation of 1101
our preconfigured routing scheme to handle event-driven or 1102
on-demand reporting applications. 1103
REFERENCES 1104
[1] I. Akiyldiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “A survey 1105on sensor networks,” IEEE Commun. Mag., vol. 40, no. 8, pp. 102–114, 1106Aug. 2002. 1107
[2] K. Kredo, II and P. Mohapatra, “Medium access control in wireless sensor 1108networks,” Comput. Netw., vol. 51, no. 4, pp. 961–994, Mar. 2007. 1109
[3] M. Miller and N. Vaidya, “A MAC protocol to reduce sensor network en- 1110ergy consumption using a wake-up radio,” IEEE Trans. Mobile Comput., 1111vol. 4, no. 3, pp. 228–242, May/Jun. 2005. 1112
[4] W. Ye, J. Heidemann, and D. Estrin, “Medium access control with coordi- 1113nated adaptive sleeping for wireless sensor networks,” IEEE/ACM Trans. 1114Netw., vol. 12, no. 3, pp. 493–506, Jun. 2004. 1115
[5] T. van Dam and K. Langendoen, “An adaptive energy-efficient MAC pro- 1116tocol for wireless sensor networks,” in Proc. ACM SenSys, Los Angeles, 1117CA, Nov. 2003, pp. 171–180. 1118
[6] J. Polastre, J. Hill, and D. Culler, “Versatile low power media access for 1119wireless sensor networks,” in Proc. ACM SenSys, 2004, pp. 95–107. 1120
[7] I. Rhee, A. Warrier, M. Aia, and J. Min, “Z-MAC: A hybrid MAC for 1121wireless sensor networks,” in Proc. ACM SenSys, 2005, pp. 90–101. 1122
[8] A. El-Hoiydi and J.-D. Decotignie, “WiseMAC: An ultra low power MAC 1123protocol for multi-hop wireless sensor networks,” in Proc. Int. Workshop 1124Algosensors, 2004, pp. 18–31. 1125
[9] W. Ye, F. Silva, and J. Heidemann, “Ultra-low duty cycle MAC 1126with scheduled channel polling,” in Proc. ACM SenSys, Nov. 2006, 1127pp. 321–334. 1128
[10] X. Shi and G. Stromberg, “SyncWUF: An ultra low-power MAC protocol 1129for wireless sensor networks,” IEEE Trans. Mobile Comput., vol. 6, no. 1, 1130pp. 115–125, Jan. 2007. 1131
[11] S. Singh and C. S. Raghavendra, “PAMAS—Power aware multi-access 1132protocol with signaling for ad hoc networks,” ACM Comput. Commun. 1133Rev., vol. 28, no. 3, pp. 5–26, Jul. 1998. 1134
[12] R. C. Shah and H. M. Rabaey, “Energy aware routing for low energy ad 1135hoc sensor networks,” in Proc. IEEE WCNC. Orlando, FL, Mar. 2002, 1136pp. 350–355. 1137
IEEE
Proo
f
16 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY
[13] J. Chang and L. Tassiulas, “Maximum lifetime routing in wireless sensor1138networks,” IEEE/ACM Trans. Netw., vol. 12, no. 4, pp. 609–619, Aug. 15,11392004.1140
[14] C. F. Chiasserini and M. Garetto, “An analytical model for wireless sensor1141networks with sleeping nodes,” IEEE Trans. Mobile Comput., vol. 5,1142no. 12, pp. 1706–1718, Dec. 2006.1143
[15] S. Tilak, N. B. Abu-Ghazaleh, and W. Heinzelman, “Infrastructure trade-1144offs for sensor networks,” in Proc. ACM WSNA, Atlanta, GA, Sep. 2002,1145pp. 49–58.1146
[16] O. B. Akan and I. F. Akyildiz, “Event-to-sink reliable transport for wire-1147less sensor networks,” IEEE/ACM Trans. Netw., vol. 13, no. 5, pp. 1003–11481016, Oct. 2005.1149
[17] F. Bouabdallah, N. Bouabdallah, and R. Boutaba, “Towards reliable and1150efficient reporting in wireless sensor networks,” IEEE Trans. Mobile1151Comput., vol. 7, no. 8, pp. 978–994, Aug. 2008.1152
[18] M. C. Vuran and I. F. Akyildiz, “Spatial correlation-based collaborative1153medium access control in wireless sensor networks,” IEEE/ACM Trans.1154Netw., vol. 14, no. 2, pp. 316–329, Apr. 2006.1155
[19] H. Kwon, T. H. Kim, S. Choi, and B. G. Lee, “A cross-layer strategy1156for energy-efficient reliable delivery in wireless sensor networks,” IEEE1157Trans. Wireless Commun., vol. 5, no. 12, pp. 3689–3699, Dec. 2006.1158
[20] D. J. Baker and A. Ephremides, “The architectural organization of a1159mobile radio network via a distributed algorithm,” IEEE Trans. Commun.,1160vol. COM-29, no. 11, pp. 1694–1701, Nov. 1981.1161
[21] A. Ephremides, J. E. Wieselthier, and D. J. Baker, “A design concept for1162reliable mobile radio networks with frequency hopping signaling,” Proc.1163IEEE, vol. 75, no. 1, pp. 56–73, Jan. 1987.1164
[22] V. Rodoplu and T. H. Meng, “Minimum energy mobile wireless1165networks,” in Proc. IEEE ICC, Atlanta, GA, Jun. 1998, vol. 31166pp. 1633–1639.1167
[23] C. K. Toh, “Maximum battery life routing to support ubiquitous mobile1168computing in wireless ad hoc networks,” IEEE Commun. Mag., vol. 39,1169no. 6, pp. 138–147, Jun. 2001.1170
[24] Q. Li, J. Aslam, and D. Rus, “Online power-aware routing in wireless1171ad hoc networks,” in Proc. ACM MobiCom, Rome, Italy, Jul. 2001,1172pp. 97–107.1173
[25] I. Stojmenovic and X. Lin, “Power-aware localized routing in wireless1174networks,” IEEE Trans. Parallel Distrib. Syst., vol. 12, no. 11, pp. 1122–11751133, Nov. 2001.1176
[26] J. H. Chang and L. Tassiulas, “Maximum lifetime routing in wireless1177sensor networks,” IEEE/ACM Trans. Netw., vol. 12, no. 4, pp. 609–619,1178Aug. 2004.1179
[27] J. H. Chang and L. Tassiulas, “Maximum lifetime routing in wireless1180sensor networks,” in Proc. ATIRP Conf., Mar. 2000, pp. 609–619.1181
[28] Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY)1182Specifications, 1999. Available: ISO/IEC IEEE 802.11 Standard.1183
[29] C. P. Chan and S. C. Liew, “Data-collection capacity of IEEE 802.11-1184like sensor networks,” in Proc. IEEE ICC, Istanbul, Turkey, Jun. 2006,1185pp. 3339–3346.1186
[30] F. A. Tobagi and L. Kleinrock, “Packet switching in radio channels—1187Part II: The hidden terminal problem in carrier sense multiple-access and1188the busy-tone solution,” IEEE Trans. Commun., vol. COM-23, no. 12,1189pp. 1417–1433, Dec. 1975.1190
[31] K. Jain, J. Padhye, V. Padmanabhan, and L. Qiu, “Impact of interference1191on multi-hop wireless network performance,” in Proc. ACM MobiCom,1192San Diego, CA, Sep. 2003, pp. 66–80.1193
[32] Chipcon, CC2420 Data Sheet. [Online]. Available: http://www.1194chipcon.com/1195
[33] J. Bicket, D. Aguayo, S. Biswas, and R. Morris, “Architecture and evalu-1196ation of an unplanned 802.11b mesh network,” in Proc. ACM MobiCom,1197Cologne, Germany, Sep. 2005, pp. 31–42.1198
[34] K. Medepalli and F. A. Tobagi, “Towards performance modeling of IEEE1199802.11 based wireless networks: A unified framework and its applica-1200tions,” in Proc. IEEE INFOCOM, Barcelona, Spain, Apr. 2006, pp. 1–12.1201
[35] M. Garetto, T. Salonidis, and E. Knightly, “Modeling per-flow throughput1202and capturing starvation in CSMA multi-hop wireless networks,” in Proc.1203IEEE INFOCOM, Barcelona, Spain, Apr. 2006, pp. 1–13.1204
[36] G. Bianchi, “Performance analysis of the IEEE 802.11 distributed coordi-1205nation function,” IEEE J. Sel. Areas Commun., vol. 18, no. 3, pp. 535–547,1206Mar. 2000.1207
[37] B. Sericola, “Closed form solution for the distribution of the total time1208spent in a subset of states of a Markov process during a finite observation1209period,” J. Appl. Probab., vol. 27, pp. 713–719, 1990.1210
[38] The Network Simulator—NS-2. [Online]. Available: http://www.isi.edu/1211nsnam/ns1212
[39] D. B. Johnson, D. A. Maltz, and J. Broch, “DSR: The dynamic source1213routing protocol for multihop wireless ad hoc networks,” in Ad Hoc1214
Networking, C. E. Perkins, Ed. Reading, MA: Addison-Wesley, 2001, 1215ch. 5, pp. 139–172. 1216
[40] C. E. Perkins and E. M. Royer, “Ad-hoc on demand distance vector 1217routing,” in Proc. WMCSA, 1999, pp. 90–100. 1218
[41] D. Couto, D. Aguayo, J. Bicket, and R. Morris, “A high-throughput path 1219metric for multi-hop wireless routing,” in Proc. ACM MOBICOM, 2003, 1220pp. 134–146. 1221
[42] M. Garetto, J. Shi, and E. Knightly, “Modeling media access in embed- 1222ded two-flow topologies of multi-hop wireless networks,” in Proc. ACM 1223MobiCom, Cologne, Germany, Aug. 2005, pp. 200–214. 1224
Fatma Bouabdallah received the B.S. degree in computer engineering from the AQ61225Ecole Nationale des Sciences de l’Informatique, Tunis, Tunisia, in 2005 and the 1226M.S. degree in network and computer science from the University of Paris VI, 1227Paris, France, in 2006. She is currently working toward the Ph.D. degree with 1228the Institut National de Recherche en Informatique et en Automatique. Rennes, 1229France. 1230
Her research interests include wireless sensor networks, cross-layer design, 1231and modeling and performance evaluation of computer networks. 1232
Nizar Bouabdallah received the B.S. degree in 1233telecommunications engineering from the Ecole 1234Superieur des Communications (Sup’Com), Tunis, 1235Tunisia, in 2001 and the M.S. and Ph.D. degrees 1236in network and computer science from the Univer- 1237sity of Paris VI, Paris, France, in 2002 and 2004, 1238respectively. 1239
In 2002, he joined Alcatel Research Laboratories, 1240Marcoussis, France. In 2005, he was with North 1241Carolina State University, Raleigh, as a Postdoctoral 1242Fellow. He is currently a Researcher with the In- 1243
stitut National de Recherche en Informatique et en Automatique, Rennes, 1244France. Since February 2007, he has been a Visitor Researcher with the 1245David R. Cheriton School of Computer Science, University of Waterloo, 1246Waterloo, ON, Canada. His research interests include optical networking, 1247wireless and sensor networks, performance evaluation, and network planning 1248and modeling. 1249
Raouf Boutaba received the M.Sc. and Ph.D. de- 1250grees in computer science from the University Pierre 1251& Marie Curie, Paris, France, in 1990 and 1994, 1252respectively. 1253
He is currently a Professor of computer science 1254with the School of Computer Science, University 1255of Waterloo, Waterloo, ON, Canada. His research 1256interests include network, resource, and service man- 1257agement in wired and wireless networks. 1258
Dr. Boutaba is currently a Distinguished Lecturer 1259of the IEEE Communications Society the Chairman 1260
of the IEEE Technical Committee on Information Infrastructure, and the 1261Director of the ComSoc Related Societies Board. He is the Founder and 1262Editor-in-Chief of the IEEE TRANSACTIONS ON NETWORK AND SERVICE 1263MANAGEMENT and is currently serving on the editorial boards of several 1264other journals. He was the recipient of several best paper awards and other 1265recognitions, such as the Premier’s Research Excellence Award. 1266




















