
Non-parametric estimation of a time varying GARCH model
38
Non-parametric estimation of a time varying GARCH model by Neelabh Rohan and T. V. Ramanathan Technical Report 3/2011 Department of Statistics and Centre for Advanced Studies University of Pune, 411 007, INDIA May, 2012 (Revised) 1
-
Upload
kedarunipune -
Category
Documents
-
view
1 -
download
0
Transcript of Non-parametric estimation of a time varying GARCH model
Non-parametric estimation of a timevarying GARCH model
by Neelabh Rohan and T. V. Ramanathan
Technical Report 3/2011
Department of Statistics and Centre for Advanced StudiesUniversity of Pune, 411 007, INDIA
May, 2012 (Revised)
1

Non-parametric estimation of a timevarying GARCH model
Neelabh Rohan1 and T. V. Ramanathan2
Department of Statistics and Centre for Advanced StudiesUniversity of Pune, 411 007, INDIA
Abstract
In this paper, a non-stationary time-varying GARCH (tvGARCH) model has beenintroduced by allowing the parameters of a stationary GARCH model to vary as functionsof time. It is shown that the tvGARCH process is locally stationary in the sense that itcan be locally approximated by stationary GARCH processes at fixed time points. Wedevelop a two step local polynomial procedure for the estimation of the parameter func-tions of the proposed model. Several asymptotic properties of the estimators have beenestablished including the asymptotic optimality. It has been found that the tvGARCHmodel performs better than many of the standard GARCH models for various real datasets.
Mathematical Subject classification: 62M10, 62G05
Keywords: Local polynomial estimation, time-varying GARCH, volatility modelling.
1Corresponding author Email: [email protected]: [email protected]
2

1 Introduction
The first decade of the 21st century left the global economies grappling with the conse-
quences of the financial crisis followed by an uninvited rash of currency wars. Many of
the emerging economies started receiving large capital inflows that have the potential to
destabilizing the economy. Perhaps, the most deleterious consequence of capital inflows
has been the strengthening of domestic currency, which can lead to a loss in export com-
petitiveness. This, in turn led to currency wars-the phenomenon of several emerging and
developed countries intervening in currency market simultaneously in order to ensure that
their currency will not be the only one that appreciates. Such a phenomenon may induce
instability and hence non-stationarity in the bilateral exchange rate volatility process,
implying the failure of standard stationary volatility models. In this paper, we address
this problem by considering a GARCH model with time varying parameters.
Non-stationary volatility models have got considerable attention recently, see for ex-
ample Mercurio and Spokoiny (2004), Mikosch and Starica (2004), Starica and Granger
(2005), Dahlhaus and Subba Rao (2006), Amado and Terasvirta (2008), Fryzlewicz, Sap-
atinas and Subba Rao (2008) and Chen and Hong (2009) and among others. Dahlhaus
and Subba Rao (2006) proposed a time-varying ARCH (tvARCH) model for the volatil-
ity process by allowing the parameters of a stationary ARCH model to change slowly
through time. Fryzlewicz et al. (2008) developed a least-squares estimation procedure
for such a tvARCH model. We generalize the tvARCH model introduced by Dahlhaus
and Subba Rao (2006) to time varying GARCH (tvGARCH) by allowing the parameters
of a stationary GARCH model to vary as functions of time.
Dahlhaus and Subba Rao (2006) showed that the tvARCH model can be approxi-
mated by stationary ARCH processes locally. We extend their results to the tvGARCH
model and show that a non-stationary tvGARCH process can be locally approximated by
stationary processes at specific time points. Therefore, the tvGARCH model is asymp-
totically locally stationary at every point of observation, but it is globally non-stationary
because of time-varying parameters. Such an approximation further helps us in deriving
the asymptotic distribution of the estimators.
An alternative approach to incorporate non-stationarity in the volatility process is the
varying coefficient GARCH model (see Cizek and Spkoiny (2009) and references therein).
The estimation of a varying coefficient GARCH model requires the search for local time
3

intervals of homogeneity over the entire period, such that the parameters of the process
remain nearly a constant over each interval. The estimation is carried out using the
quasi-maximum likelihood (QML) approach. However, the QML procedure is not very
reliable when the sample size is small, since the quasi-likelihood tends to be shallow about
the minimum for small sample sizes, see Shephard (1996), Bose and Mukherjee (2003)
and Fryzlewicz et al. (2008). In addition, the QML estimator does not admit a closed
form solution. The model and estimation procedure of Amado and Terasvirta (2008) also
suffers from similar drawbacks.
We develop a two-step local polynomial estimation procedure for the estimation of the
proposed tvGARCH model. One can refer to Wand and Jones (1995), Fan and Gijbels
(1996) and Fan and Zhang (1999) among others for the application of local polynomial
techniques in various regression models. The proposed two-step estimation procedure
requires the estimation of a tvARCH model initially in the first step. In the second step,
we obtain the estimator of the tvGARCH model using the initial estimator. Expressions
for the asymptotic bias and variance of the estimators in both the steps are derived and
asymptotic normality is established. It is found that the asymptotic MSE of estimators
of the parameter functions of tvGARCH model remain invariable for a wide range of the
initial step bandwidths, thus making it computation friendly. Moreover, our estimator
achieves the optimal rate of convergence under a higher order differentiability assumption
of the parameter functions.
Even though this paper deals with tvGARCH (1,1) process only, the results presented
here can be extended to a general tvGARCH (p, q) with appropriate modifications. In
the empirical analysis of financial data, lower order GARCH (1,1) model has often been
found appropriate to account for the conditional heteroscedasticity. It usually describes
the dynamics of conditional variance of many economic time series quite well, see for
example Palm (1996). Therefore, in this paper we concentrate on tvGARCH (1,1) model.
We illustrate the performance of the tvGARCH model using various bilateral ex-
change rate and stock indices data in the past decade. The tvGARCH model is shown
to outperform several stationary GARCH as well as tvARCH models in terms of both
in-sample and out of sample prediction. The model is also found to be performing better
than a long memory model in predicting the volatility.
The rest of the paper is organized as follows. A tvGARCH model and its properties
4

have been discussed in Section 2. Section 3 develops a two step local polynomial estima-
tion procedure for the model. We establish the asymptotic properties of the estimators
in Section 4. Several applications of the tvGARCH model are given in Section 5. All the
proofs are deferred to the Appendix.
2 A time varying GARCH model
Let ǫt be a process such that E(ǫt|Ft−1) = 0 and E(ǫ2t |Ft−1) = σ2
t , where Ft−1 =
σ(ǫt−1, ǫt−2, . . .). Suppose vt is a sequence, independent of ǫt, of real valued indepen-
dent and identically distributed random variables, having mean 0 and variance 1. Then
a GARCH model with time varying parameters is defined as
ǫt = σtvt,σ2
t = ω(t) + α(t)ǫ2t−1 + β(t)σ2
t−1
(1)
where ω(·), α(·) and β(·) are certain non-negative functions of time.
In order to obtain a meaningful asymptotic theory, we rescale the domain of the
parameter functions of (1) to unit interval. That is, we study the following process,
ǫt = σtvt,
σ2t = ω
(tn
)+ α
(tn
)ǫ2t−1 + β
(tn
)σ2
t−1, t = 1, 2, . . . , n.(2)
The sequence of stochastic processes ǫt, t = 1, 2, . . . , n is said to follow a tvGARCH
process if it satisfies (2). Here ω(u), α(u), β(u) ≥ 0 ∀ u ∈ (0, 1] ensure the non-negativity
of σ2t . We define ω(u), α(u), β(u) = 0 for u < 0. Such a rescaling is a common technique in
non-parametric regression and it does not affect the estimation procedure, see Dahlhaus
and Subba Rao (2006).
Now we show that the tvGARCH process can be locally approximated by stationary
GARCH processes at specific time points. This allows us to refer the tvGARCH as a lo-
cally stationary process. Towards this, first we state the following technical assumptions:
Assumption 1. (i) There exists δ > 0 such that
0 < α(u) + β(u) ≤ 1 − δ, ∀ 0 < u ≤ 1 and supu
ω(u) < ∞.
(ii) There exist finite constants M1,M2 and M3 such that ∀ u1, u2 ∈ (0, 1],
|ω(u1) − ω(u2)| ≤ M1|u1 − u2||α(u1) − α(u2)| ≤ M2|u1 − u2||β(u1) − β(u2)| ≤ M3|u1 − u2|.
5

The Assumption 1 (i) here is similar in spirit to the stationarity condition for GARCH
(1,1) model discussed by Nelson (1991). This condition is required for the existence
of a well defined unique solution to the tvGARCH process. It is also sufficient for the
tvGARCH to be a short memory process. The Lipschitz continuity condition for the
parameters in Assumption 1 (ii) is required for the local stationarity of the tvGARCH
process. Similar condition is also assumed by Dahlhaus and Subba Rao (2006) for pa-
rameters of the tvARCH process. Notice that we do not make any assumption on the
density function of ǫt. Therefore, the methodology introduced in the paper will be useful
for analyzing data with heavy tailed distributions which is a common phenomenon in
financial time series.
Before proceeding further, we show in Proposition 2.1 that the tvGARCH process
possesses a well defined unique solution. In the Proposition 2.2, we derive the covariance
structure of the tvGARCH process and show that tvGARCH is a short memory process.
Proposition 2.1. Let the Assumption 1 (i) hold. Then the variance process (2) has
a well defined unique solution given by
σ2t = ω
(tn
)+
∞∑i=1
i∏j=1
(α(
t−j+1n
)v2
t−j + β(
t−j+1n
))ω(
t−in
),
such that |σ2t − σ2
t | → 0 a.s., if σ20 (starting point) is finite with probability one. Also,
infu
ω(u)/(1 − infu
β(u)) ≤ σ2t < ∞ ∀ t a.s.
Proposition 2.2. Suppose that the Assumption 1 (i) is satisfied for the tvGARCH
process. Further assume that E|vt|4 < ∞. Then for a fixed k ≥ 0 and 0 < δ < 1,
Cov(ǫ2t , ǫ
2t+k) = O
((1 − δ)k
).
Now we define a stationary GARCH (1,1) process, which locally approximates the original
process (2) in the neighborhood of a fixed point (see Proposition 2.3). Let ǫt(u0), u0 ∈(0, 1] be a process with E(ǫt(u0)|Ft−1) = 0 and E(ǫ2
t (u0)|Ft−1) = σ2t (u0) where Ft−1 =
σ(ǫt−1, ǫt−2, . . .). Then ǫt(u0) is said to follow a stationary GARCH process associated
with (2) at time point u0 if it satisfies,
ǫt(u0) = σt(u0)vt,σ2
t (u0) = ω(u0) + α(u0)ǫ2t−1(u0) + β(u0)σ
2t−1(u0).
(3)
6

Under Assumption 1(i), (3) is a stationary ergodic process. It is also sufficient for ǫt(u0)
to be weakly stationary. A unique stationary ergodic solution to (3) is
σ2t (u0) = ω (u0) +
∞∑i=1
i∏j=1
(α (u0) v2
t−j + β (u0))ω (u0) . (4)
Here |σ2t (u0) − σ2
t (u0)| → 0 a.s. (see Nelson (1991)). Now in the following proposition,
we show that if the time point (t/n) is close to u0, then (3) can be locally considered as
an approximation to (2).
Proposition 2.3. Suppose that the Assumptions 1 (i) and (ii) are satisfied, then the
process ǫ2t can be approximated locally by a stationary ergodic process ǫ2
t (u0). That
is, there exists a well defined stationary ergodic process Vt independent of u0 and a con-
stant Q < ∞ such that
|ǫ2t − ǫ2
t (u0)| ≤ Q(∣∣∣ t
n− u0
∣∣∣+ 1n
)Vt a.s.
or equivalently
ǫ2t = ǫ2
t + OP
(∣∣∣ tn− u0
∣∣∣+ 1n
).
We can also write (2) by recursive substitution,
σ2t = α0(
tn) +
t−1∑k=1
αk(tn)ǫ2
t−k + σ20
t∏i=1
β(
t−i+1n
), (5)
where
α0(tn) = ω
(tn
)+
t−1∑k=1
ω(
t−kn
) k∏i=1
β(
t−i+1n
), αk(
tn) = α
(t−k+1
n
) k−1∏i=1
β(
t−i+1n
),
k = 1, 2, . . . t − 1.
Here we take0∏
i=1β(
t−i+1n
)= 1. Notice that the functions αk(·) here are geometrically
decaying as k → ∞ under Assumption 1(i). Also, if σ20 is finite with probability one, then
σ20
t∏i=1
β(
t−i+1n
)P→ 0 as t → ∞, n → ∞. Here,
P→ denotes convergence in probability.
3 Local polynomial estimation
The local polynomial estimation of the tvGARCH model (2) can be carried out in two
steps. In Step 1, we obtain a preliminary estimate of σ2t using a time varying ARCH
(p) model, exploiting the representation (5) of tvGARCH. In the second step, we finally
7

reach the estimators of the parameter functions of tvGARCH. It has been shown that
with appropriately chosen bandwidth, the rate of convergence of the MSE of final esti-
mates become independent of the initial step estimates.
Step 1. First, we obtain a preliminary estimate of σ2t using the following tvARCH
(p) model;
σ2t = α0(
tn) + α1(
tn)ǫ2
t−1 . . . + αp(tn)ǫ2
t−p
which can also be written as
ǫ2t = α0(
tn) + α1(
tn)ǫ2
t−1 . . . + αp(tn)ǫ2
t−p + σ2t (v
2t − 1).
Here, p is such that p = pn → ∞ as n → ∞. Among several choices of such a p, one
specific choice is log n. The asymptotic results derived in Section 4 for the tvGARCH
model hold for pn → ∞. However, we drop the suffix n for notational simplicity. We
use local polynomial technique to estimate the functions αi(u), i = 0, 1, . . . p, treating
σ2t (v
2t −1) as error. Now onwards, we will denote (t/n) = ut. We assume that the function
αi(·) possesses a bounded continuous derivative up to order d + 1, (d ≥ 1) (see Section
4). Using Taylor’s series expansion, the function αi(u) can locally be approximated in
the neighborhood of a point u0 by,
αi(ut) ≈ αi0 + αi1(ut − u0) + . . . + αid(ut − u0)d, i = 0, 1, . . . , p
where αij, j = 0, 1, . . . d are constants. Therefore, given a Kernel function K(·), we get
the estimator by minimizing,
L =n∑
i=p+1
(ǫ2i −
d∑k=0
(α0k +p∑
j=1αjkǫ
2i−j)(ui − u0)
k
)2
Kh1(ui − u0) (6)
where Kh1(·) = (1/h1)K(·/h1) and h1 denotes the bandwidth. Define
Ut = [1, (ut − u0), . . . , (ut − u0)d]1×(d+1) t = 1, 2, . . . , n ,
X1 =
Up+1 ǫ2pUp+1 . . . ǫ2
1Up+1
Up+2 ǫ2p+1Up+2 . . . ǫ2
2Up+2...
.... . .
...Un ǫ2
n−1Un . . . ǫ2n−pUn
,
W1 = diag(Kh1(up+1 − u0), . . . , Kh1(un − u0)) and Y1 = [ǫ2p+1, . . . ǫ
2n]⊤.
8

The estimator of αi(u0) as a solution to least-squares problem (6) can be expressed as,
αi(u0) = e⊤i(d+1)+1,(p+1)(d+1)(X⊤1 W1X1)
−1X⊤1 W1Y1, i = 0, 1, . . . , p. (7)
Here and throughout the paper, we use the notation ek,m for a column vector of length
m with 1 at kth position and 0 elsewhere. Therefore, an initial estimate of σ2t is obtained
by,
σ2t = α0(ut) +
p∑k=1
αk(ut)ǫ2t−k,
where α0(ut) and αk(ut) represent the estimators of α0(ut) and αk(ut) respectively. They
are calculated using (7) at ut. We set ǫ2t = 0, ∀ t ≤ 0 for the practical implementation.
This method can also be used for the estimation of a tvARCH (p) model of Dahlhaus
and Subba Rao (2006).
Step 2. In this step, we use the conditional variance initially estimated in Step 1 to
get the estimates of the parameter functions of tvGARCH process. The parameter func-
tions ω(·), α(·) and β(·) are assumed to be continuously differentiable up to order d + 1.
Using Taylor’s series expansion, we can write,
ω(ut) ≈ ω02 + ω12(ut − u0) + . . . + ωd2(ut − u0)d
α(ut) ≈ a02 + a12(ut − u0) + . . . + ad2(ut − u0)d
β(ut) ≈ b02 + b12(ut − u0) + . . . + bd2(ut − u0)d
where ωi2, ai2 and bi2, i = 0, 1, . . . , d are constants. We can write (2) as
ǫ2t = ω( t
n) + α( t
n)ǫ2
t−1 + β( tn)σ2
t−1 − β( tn)(σ2
t−1 − σ2t−1) + σ2
t (v2t − 1). (8)
Corollary 2 (in Section 4) shows that for a particular choice of the Step 1 bandwidth
h1 = o(h2), E(σ2t−1 − σ2
t−1) is asymptotically negligible. Here h2 denotes the bandwidth
in the Step 2. The estimates are obtained by minimizing
L =n∑
i=2
(ǫ2i −
d∑k=0
(ωk2 + ak2ǫ2i−1 + bk2σ
2i−1)(ui − u0)
k
)2
Kh2(ui − u0).
Define
X2 =
U2 ǫ21U2 σ2
1U2
U3 ǫ22U3 σ2
2U3...
......
Un ǫ2n−1Un σ2
n−1Un
,
W2 = diag(Kh2(u2 − u0), . . . , Kh2(un − u0)), and Y2 = [ǫ22, . . . , ǫ
2n]⊤.
9

Then, the exact expressions for the estimators are given by
ω(u0) = e⊤1,3(d+1)(X⊤2 W2X2)
−1X⊤2 W2Y2,
α(u0) = e⊤d+2,3(d+1)(X⊤2 W2X2)
−1X⊤2 W2Y2 and
β(u0) = e⊤2d+3,3(d+1)(X⊤2 W2X2)
−1X⊤2 W2Y2.
The final estimates of σ2t in tvGARCH model can be obtained using these estimators.
These estimators achieve the optimal rate of convergence when an optimal bandwidth is
used (see Section 4).
3.1 Bandwidth selection
As will be discussed in the next section, the two step estimator is not very sensitive to the
choice of initial bandwidth h1 as long as it is small enough, so that the bias in the first
step is asymptotically negligible. Therefore, one can simply apply the standard univariate
bandwidth selection procedures to select the smoothing parameter for Step 2. The initial
smoothing parameter can be chosen according to the second step bandwidth. For the
practical implementation, we select the optimal bandwidth (h2) using the cross validation
method based on the best linear predictor of ǫ2t given the past (see Hart (1994)), which
is, ω(
tn
)+ α
(tn
)ǫ2t−1 + β
(tn
)σ2
t−1. That is, such a bandwidth (h2) is chosen for which,
CV (h2) = 1n−1
n∑t=2
(ǫ2t − ω−t(ut) − α−t(ut)ǫ
2t−1 − β−t(ut)σ
2t−1
)2(9)
is minimum, where ω−t(ut), α−t(ut) and β−t(ut) denote the local polynomial estimators
of ω(
tn
), α(
tn
)and β
(tn
)obtained by leaving the tth observation. A pilot bandwidth is
chosen initially to get the initial estimate of σ2t−1 using the full data. Using the similar
arguments as in Hart (1994), asymptotically it can be shown that such a bandwidth is
a minimizer of the mean squared prediction error of ǫ2t . The pilot bandwidth should be
small enough to be of o(h2) and at the same time, should satisfy nh1 → ∞. In case, if
h2 comes out be such that the pilot bandwidth is not of o(h2), the above cross validation
procedure can be repeated by choosing even smaller initial bandwidth.
However, it is not feasible to compute (9) practically, as it requires the repeated
refitting of the model after deletion of the data points each time. The bandwidth selection
procedure is computationally too cumbersome, specially when n is large. Therefore we
provide a simplified version of (9) to reduce the computational complexity and make the
bandwidth selection easy and doable. This has been described in the Appendix B.
10

4 Asymptotic results
Towards proving the asymptotic results corresponding to estimators in Steps 1 and 2, we
first state the following standard technical assumptions and then introduce some nota-
tions:
Assumption 2. (i) The functions ω(·), α(·) and β(·) (and hence αj(·)) have the bounded
and continuous derivatives up to order d+1 (d ≥ 1), in a neighborhood of u0, u0 ∈ (0, 1].
(ii) K(u) is a symmetric density function of bounded variation with a compact support.
(iii) The bandwidths h1 and h2 are such that h1 → 0, h2 → 0 and nh1 → ∞, nh2 → ∞as n → ∞.
(iv) E|vt|4 < ∞.
Notations.
µi =∫
uiK(u)du, νi =∫
uiK2(u)du,
S = S(u0) = E([1, ǫ2
t−1(u0), . . . , ǫ2t−p(u0)]
⊤[1, ǫ2t−1(u0), . . . , ǫ
2t−p(u0)]
),
Cj = Cj(u0) = E(ǫ2t (u0) ǫ2
t−j(u0)),
Ω = Ω(u0) = E(σ4
t (u0)[1, ǫ2t−1(u0), . . . , ǫ
2t−p(u0)]
⊤[1, ǫ2t−1(u0), . . . , ǫ
2t−p(u0)]
),
wj = E(ǫjt(u0)), αtvARCH(u0) = [α0(u0), α1(u0), . . . , αp(u0)]
⊤,Di = [µd+1, hiµd+2, . . . , h
di µ2d+1]
⊤, i = 1, 2,em = a column vector of length m with 1 everywhere,
Ai =
1 hiµ1 . . . hdi µd
hiµ1 h2i µ2 . . . hd+1
i µd+1...
.... . .
...hd
i µd hd+1i µd+1 . . . h2d
i µ2d
,
Bi =
ν0 hiν1 . . . hdi νd
hiν1 h2i ν2 . . . hd+1
i νd+1...
.... . .
...hd
i νd hd+1i νd+1 . . . h2d
i ν2d
, i = 1, 2.
In the following theorem, we obtain the exact expressions for the biases of the estimators
of tvARCH (p) of Step 1.
Theorem 4.1 Let the Assumptions 1 and 2 be satisfied. Then the asymptotic bias of
αj(u0), j = 0, 1, . . . , p is given by,
Bias(αj(u0)) =hd+11
(d+1)!
(α
(d+1)j (u0)
)e⊤1,d+1A
−11 D1 + oP (hd+1
1 ).
11

Further, if E|vt|8 < ∞, then the asymptotic variance of the estimator is
V ar(α0(u0), . . . , αp(u0))= 1
nh1e⊤1,d+1A
−11 B1A
−11 e1,d+1V ar(v2
t )S−1ΩS−1(1 + oP (1)),
Interestingly, the bias expression for αj(u0) depends on the (d+1)th derivative of αj(u0)
only due to the structure of the model. The procedure introduced in Step 1 can be
used for the estimation of a time varying ARCH (p) model. Now it is clear that the
MSE of the estimator αj(u0) is OP (h2d+21 + (nh1)
−1). Also, when the optimal bandwidth
h1 = O(n−1/(2d+3)) is used, then the local polynomial estimator achieves the optimal rate
of convergence OP (n−(2d+2)/(2d+3)) for estimating αj(u0). Notice that for d = 3, the opti-
mal convergence rate is OP (n−8/9). Now in the following corollary, we show the asymptotic
normality of the estimator as a simple application of the martingale central limit theorem.
Corollary 4.1. Under the same assumptions as that of Theorem 4.1,
√nh1 (αtvARCH(u0) − αtvARCH(u0) − b(u0))
D→Np+1
(0, e⊤1,d+1A
−11 B1A
−11 e1,d+1V ar(v2
t )S−1ΩS−1
)
where b(u0) = Bias(αtvARCH(u0)) andD→ denotes the convergence in distribution.
Corollary 4.2. Let σ2t = αtvARCH(ut)
⊤[1, ǫ2t−1, . . . , ǫ
2t−p]
⊤(p+1)×1. Then under the Assump-
tions 1 and 2,
Bias(σ2t ) = E(σ2
t − σ2t ) = OP (hd+1
1 ) + O(ρpn)
where 0 < ρ < 1 and pn → ∞ as n → ∞.
Corollary 4.2 can be proved using Proposition 2.2, equation (5) and Theorem 4.1. It
shows that the choice of pn will contribute towards the bias of the conditional variance
in the initial step by a term which decays geometrically. Therefore, this term will have
negligible effect on final estimators as pn → ∞. In Theorem 4.2, we derive the asymp-
totic bias and the variance of the estimators of tvGARCH parameter functions obtained
in Step 2. Towards this, first we introduce few more notations.
12

Notations.
bj = bj(u0) = Bias(αj(u0)), δj = δj(u0) = αj(u0) + bj(u0), j = 0, 1, . . . , p,
λ1 = δ0 +p∑
j=1δjw2, λ2 = δ0w2 +
p∑j=1
δjCj,
λ3 = δ20 + 2δ0w2
p∑j=1
δj +p∑
j=1δ2j w4 + 2
p∑i,j=1(i<j)
δiδjCj−i,
λ1b = b0 +p∑
j=1bjw2, λ2b = b0w2 +
p∑j=1
bjCj,
λ3b = δ0b0 + (b0
p∑j=1
δj + δ0
p∑j=1
bj)w2 +p∑
j=1bj
p∑j=1
δjw4,
Ω2 = E
(σ4
t (u0)[1, ǫ2t−1(u0), δ0 +
p∑j=1
δj ǫ2t−j−1(u0)]
⊤[1, ǫ2t−1(u0), δ0 +
p∑j=1
δj ǫ2t−j−1(u0)]
),
D∗ = [1, h2µ1, . . . , hd2µd]
⊤, S2 =
1 w2 λ1
w2 w4 λ2
λ1 λ2 λ3
.
Theorem 4.2 Under the Assumptions 1 and 2, the asymptotic biases of the estimates of
parameters in the two step procedure are given as
Bias(ω(u0)) =hd+12
(d+1)!
(ω(d+1)(u0)
)e⊤1,d+1A
−12 D2
−β(u0)|S2|
(λ1b(λ3w4 − λ22) − λ2b(λ3w2 − λ1λ2)
+λ3b(λ2w2 − λ1w4))e⊤1,d+1A
−12 D∗ + oP (hd+1
2 ),
Bias(α(u0)) =hd+12
(d+1)!
(α(d+1)(u0)
)e⊤1,d+1A
−12 D2
−β(u0)|S2|
(−λ1b(λ3w2 − λ1λ2) + λ2b(λ3 − λ21)
−λ3b(λ2 − λ1w2)) e⊤1,d+1A−12 D∗ + oP (hd+1
2 ),
Bias(β(u0)) =hd+12
(d+1)!
(β(d+1)(u0)
)e⊤1,d+1A
−12 D2
−β(u0)|S2|
(λ1b(λ2w2 − λ1w4) − λ2b(λ2 − λ1w2)
+λ3b(w4 − w22)) e⊤1,d+1A
−12 D∗ + oP (hd+1
2 )
and under the additional assumption that, E|vt|8 < ∞, the asymptotic variance is
V ar(ω(u0), α(u0), β(u0)) =1
nh2e⊤1,d+1A
−12 B2A
−12 e1,d+1V ar(v2
t )S−12 Ω2S
−12 (1 + oP (1)).
In the expressions of the bias above, the second part (containing λ1b, λ2b and λ3b) is due
to the initial approximation of σ2t as in Step 1 (see proof of Theorem 4.2). However,
each λib, i = 1, 2, 3 and hence this part is OP (hd+11 ) using Theorem 4.1. Therefore, if we
choose h1 = o(h2) then the bias expression becomes free of the bias due to the first step
asymptotically. That is, if h1 = o(h2), then
Bias(ω(u0)) =hd+12
(d+1)!
(ω(d+1)(u0)
)e⊤1,d+1A
−12 D2 + oP (hd+1
2 ),
Bias(α(u0)) =hd+12
(d+1)!
(α(d+1)(u0)
)e⊤1,d+1A
−12 D2 + oP (hd+1
2 ),
Bias(β(u0)) =hd+12
(d+1)!
(β(d+1)(u0)
)e⊤1,d+1A
−12 D2 + oP (hd+1
2 )
13
It is interesting to note that the bias expressions are free of the derivatives of other pa-
rameter functions. Also, if h1 = o(h2), then δj = αj(u0) + oP (hd+12 ) and the variance
of the estimator does not depend on the first step bandwidth. This means that when
the optimal bandwidth is used, then the estimation remains unaffected for a large choice
of initial step bandwidth. This makes the estimation procedure relatively easy to imple-
ment. The MSE of the final estimator is OP (h2d+22 +(nh2)
−1), which is independent of the
initial step bandwidth. Notice that this MSE achieves the optimal rate of convergence at
an order of n−(2d+2)/(2d+3) for an optimal bandwidth h2 of order n−1/(2d+3) and h1 = o(h2).
Now in the following corollary, we prove the asymptotic normality of the estimator using
martingale central limit theorem.
Corollary 4.3. Under the same assumptions as that of Theorem 4.2,
√nh2
(βtvGARCH(u0) − βtvGARCH(u0) − btvGARCH(u0)
)
D→ N3
(0, e⊤1,d+1A
−12 B2A
−12 e1,d+1V ar(v2
t )S−12 Ω2S
−12
)
where βtvGARCH(u0) = [ω(u0), α(u0), β(u0)]⊤ and btvGARCH(u0) =
[Bias(ω(u0)), Bias(α(u0)), Bias(β(u0))]⊤.
Remark 4.1. Above results have led us to the following two important issues, which
need further investigation.
1. The asymptotic distributions of the estimators of the parameter functions depend
on the parameters of the stationary approximation to tvGARCH defined in (3),
which is unobservable. Therefore, to derive a confidence band (or point-wise con-
fidence intervals), one can use the bootstrap methods. Fryzlewicz, Sapatinas and
Subba Rao (2008) used residual bootstrap methods of Franke and Kreiss (1992)
to construct point-wise confidence intervals for the least-squares estimator of the
tvARCH model. To avoid instability of the generated process, they modified their
estimator so that the sum of all the estimated coefficients remain less than one.
However, their method does not guarantee the estimators to be non-negative. This
results in some of the bootstrapped residual squares to be negative. In order to
tackle this problem, one needs to carefully formulate a bootstrap procedure and
establish its working. Another approach would be to modify the estimation proce-
dure itself to satisfy these constraints, see for example Bose and Mukherjee (2009).
14
This problem is under investigation.
2. Our method assumes that all the three tvGARCH parameter functions have the
same degree of smoothness and hence they can be approximated equally well in the
same interval. But if the functions possess different degrees of smoothness, then the
proposed method may not give the optimal estimators (see Fan and Zhang (1999)).
Therefore, one has to construct an estimator that is adaptive to different degrees
of smoothness in different parameter functions.
5 Modelling and forecasting volatility using tvGARCH
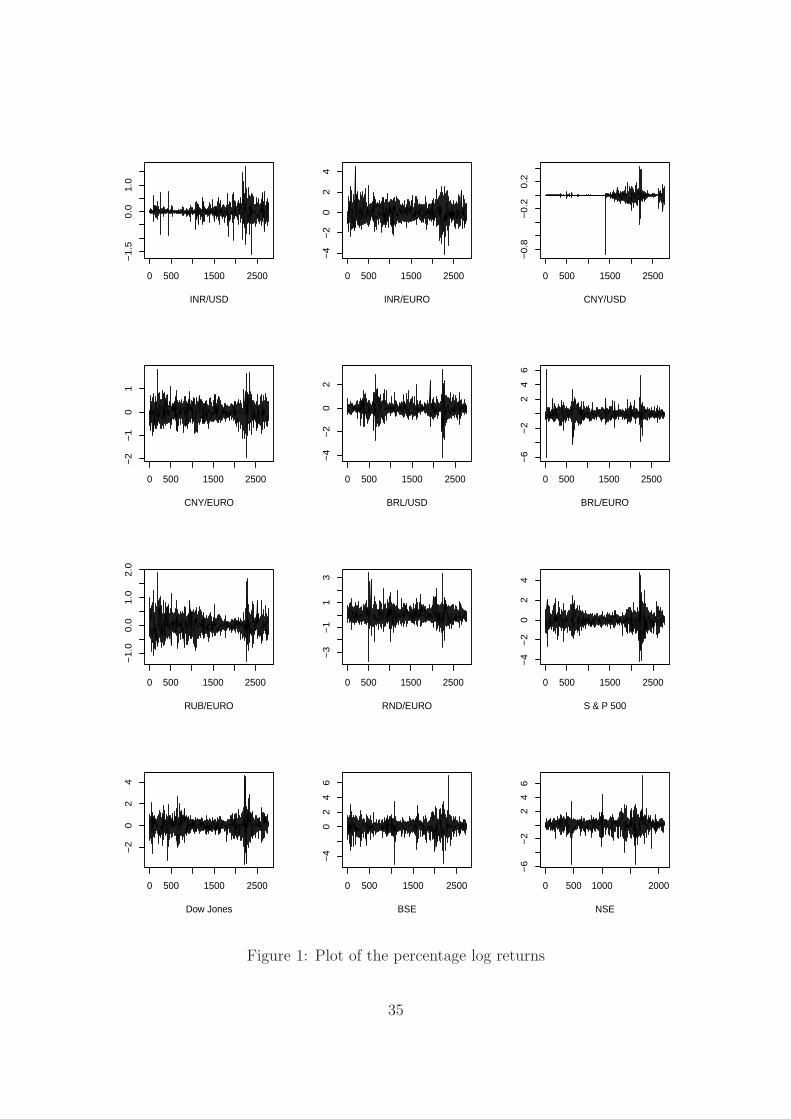
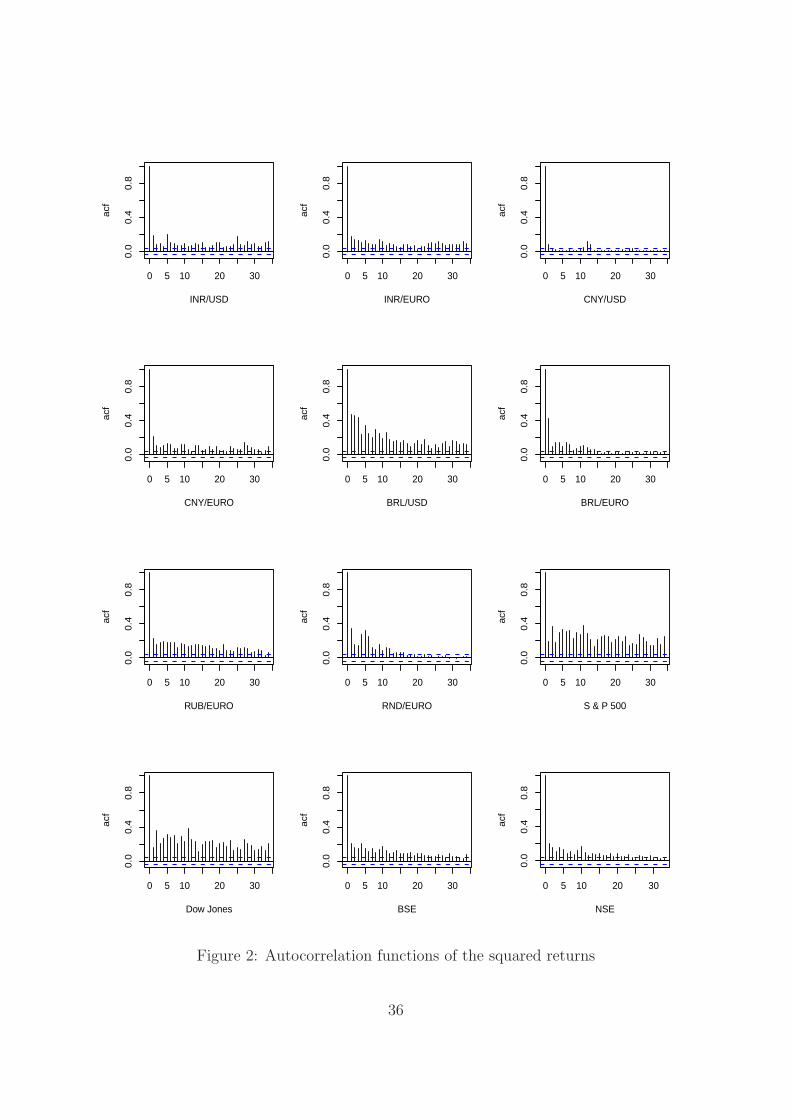
We analyze the currency exchange rates between five major developing economies in the
forefront of global economic recovery viz. Brazil (BRL), Russia (RUB), India (INR),
China (CNY) and South Africa (RND) (so called ‘BRICS’) and the developed economies
viz. United States (USD) and Europe (EURO). The last decade saw the ‘BRICS’ mak-
ing their mark on the global economic landscape. In recent times, these economies are
severely affected due to the global financial crisis and currency wars. This was our mo-
tivational factor in analyzing these exchange rates data using tvGARCH. Applications
of the tvGARCH model has also been discussed in four stock indices, S & P 500, Dow
Jones, Bombay stock exchange (BSE, India) and National stock exchange (NSE, India).
All the data sets consist of daily percent log returns ranging from the beginning of 2000
(dates varying) to December 31, 2010 except NSE data, which start from January 2002.
The data are available from the websites of US Federal Reserve, European Central Bank
and www.finance.yahoo.com. Figures 1 and 2 depict the plot of the return data and au-
tocorrelation functions of squared returns. In Table 1, we provide the summary statistics
of of the data.
To compare the in-sample prediction performance of tvGARCH with several other
well known existing models, we compute the aggregated mean squared error (AMSE)
(see Fryzlewicz, Sapatinas and Subba Rao (2008)):
AMSE =n∑
t=1(ǫ2
t − σ2t )
2,
where σ2t and ǫ2
t are the predicted volatility and squared return at time t and n denotes
the sample size. These are reported in Table 2. The lowest AMSEs are presented in
bold letters. Here, GARCH (1,1), EGARCH (1,1) and GJR (1,1) (see Engle and Ng
15
(1993) and references therein) models are estimated using SAS, while MATLAB is used
for the estimation of FIGARCH (1, d0, 1) model, where d0 is the fractional differencing
parameter to be estimated from the data (Baillie (1996)). The definitions of these models
are provided in Appendix C. R codes have been written for the estimation of tvGARCH
(with d = 3, 1 and p = log n) and tvARCH models using Epanechnikov kernel. All the
codes can be made available on from authors. The choices of d = 3, 1 facilitate the optimal
rate of convergence of the order of n−8/9 and n−4/5 respectively and p = log n requires
lesser number of parameters to be estimated in Step 1 as compared to other choices of
p such as√
n. The bandwidth is selected using the cross-validation method as described
in Section 3.1. Estimation of the tvARCH model has been carried out using Step 1
methodology of Section 3 with bandwidth chosen using cross validation, minimizing the
mean-squared prediction error for tvARCH (Hart (1994)). EGARCH model could not be
estimated for the CNY/USD data due to convergence problems.
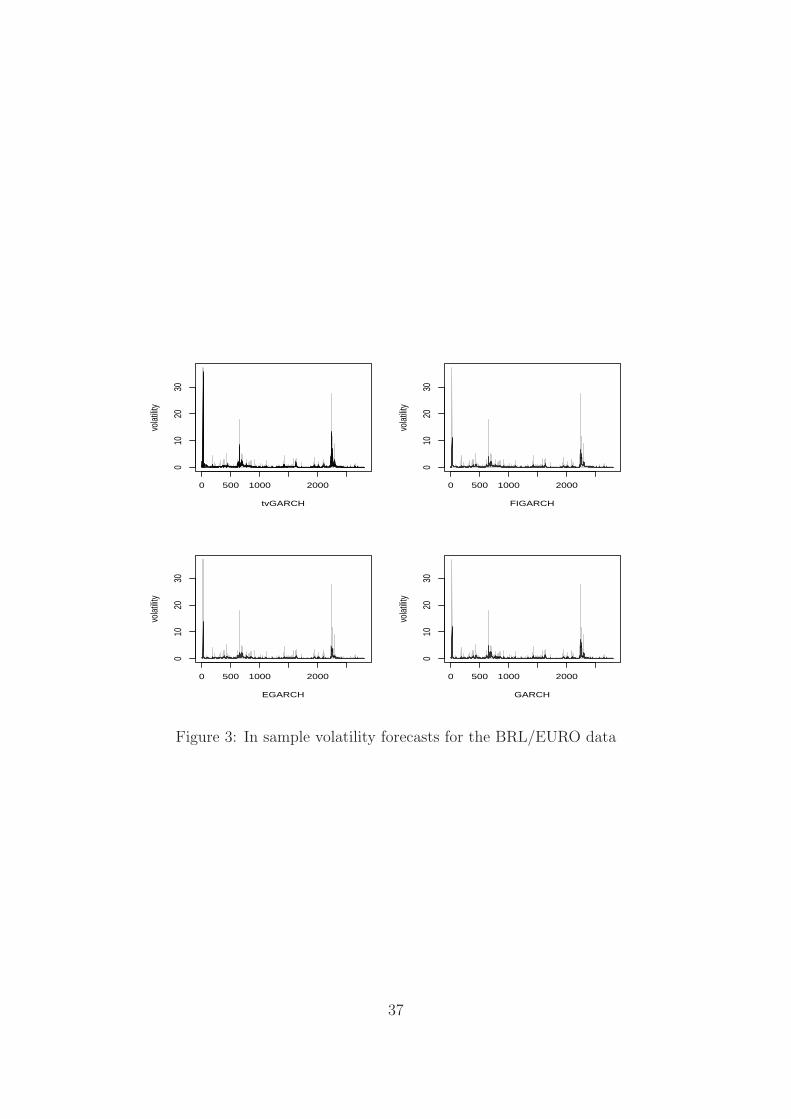
Superiority of the tvGARCH model is evident from the Table 2. The non-stationary
models have clearly outperformed stationary as well as long memory models. The AMSEs
of tvGARCH with d = 3 are smaller than that with d = 1 in most of the cases. However,
the difference between the two is not very high. An illustrative comparison of tvGARCH
(d = 3) model is also shown in Figure 3 for BRL/EURO data. The faint plot depicts
the squared returns and the dark plot is the predicted volatility with the corresponding
model. Clearly, the tvGARCH model has captured the ups and downs in the volatility
more accurately.
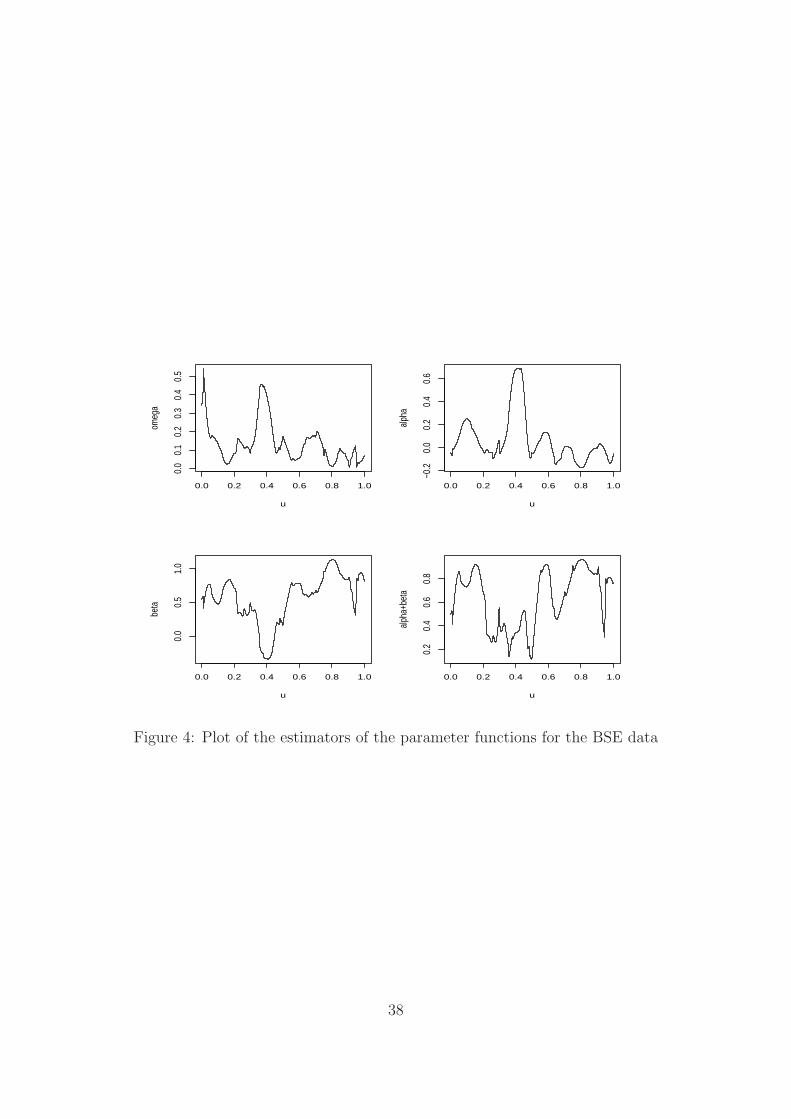
In Figure 4, we plot the the estimators ω(u), α(u), β(u) and α(u) + β(u) against
u ∈ (0, 1] for the BSE data. Notice that similar to the least squares estimators of
Fryzlewicz, Sapatinas and Subba Rao (2008), the local polynomial estimators are not
guaranteed to be non-negative. Although, the estimators satisfy α(u) + β(u) < 1 for this
data, this may not be the case in general depending on the behaviour of the data.
To compare the performance of the tvGARCH model further, in Table 3, we report
the AMSE for the in-sample monthly volatility (of 22 trading days) forecasts for the
same data sets, based on the monthly returns. The monthly returns are calculated
as rmt = log(Pt/Pt−1), t = 1, 2, . . . , T , where Pt denotes the closing price on the last
day of tth month and T is the total number of complete months in the data. All the
datasets are of size around 125 except NSE dataset which has the size 95. This analysis
16
provides insight into the nature of the tvGARCH model for small data sets. Our numerical
evidences indicated that the asymptotic properties derived in Section 4 regarding the
bandwidth selection also hold for these moderate sized monthly datasets. We did not
multiply the returns with 100 to avoid large values. This, together with small data size
has resulted in very small AMSEs. However, for comparative purposes, this does not
make any difference. Clearly, the tvGARCH is performing better than other models even
for small sample sizes.
One interesting conclusion that can be drawn from the above analyses is that the
global crisis and specially the currency wars have vehemently turned the exchange rates
volatility towards non-stationarity and short memory. This is quite possible as the fre-
quent manipulation of the currencies may lead the currency rates to lose its widespread
notion of the long memory behaviour.
The ‘out of sample forecasting’ performance of the tvGARCH model has been judged
using 50 daily forecasts computed by a rolling-window scheme. The out of sample fore-
casts of the tvGARCH model are computed as follows. Use the n1 = n− 50 observations
for the in-sample estimation. Then, forecast into the future using the ‘last’ estimated
coefficient values, that is, the estimate of coefficient functions at t = n1. Forecasts into
the future are computed in the same way as in a stationary GARCH model using these
last coefficient estimates. Similar method has also been used by Fryzlewicz et al. (2008)
for the future forecasts using the tvARCH model. Let σ2t+1|t, t = n1, n1 + 1, . . . , n − 1
denote the one-step ahead out of sample forecasts using the previous n1 observations.
We compare σ2t+1|t with ǫ2
t+1, t = n − 50, n − 49, . . . , n − 1 to get the AMSEs, which are
reported in Table 4.
The out of sample forecasts using tvGARCH model are better than those of the other
models. The tvGARCH attains the lowest AMSE for 7 data sets, while tvARCH (2) is
better in 1 case. The FIGARCH and EGARCH models have shown good forecasts for
two data sets each, while GARCH and GJR models are performing abysmally.
It is noticeable that the tvGARCH model with d = 1 performs better than the tv-
GARCH with d = 3 in the out of sample forecasting. However, there is not much of a
difference between AMSEs of tvGARCH with d = 3 and d = 1. The better performance
of tvGARCH (d = 3) than tvGARCH (d = 1) in the in-sample forecasting can be ex-
plained to some extent by the fact that bigger d yields a higher convergence rate of MSE.
17
However, this need not be the case in out of sample forecasting. Since the difference
between the tvGARCH models with d = 3 and d = 1 is not very high, it seems better
and more practical to use small d = 1. One more advantage of d = 1 is that it reduces
the number of parameters to be estimated.
Acknowledgments
The first author would like to acknowledge the Council of Scientific and Industrial Re-
search (CSIR), India, for the award of a junior research fellowship. The second author’s
research is supported by a research grant from CSIR under the head 25(0175)/09/ EMR-
II.
Appendix A: Proofs
In this Appendix, we provide the proofs of the results discussed in Sections 2 and 4
along with some auxiliary lemmas.
Proof of Proposition 2.1. By recursive substitution in (2), we obtain
σ2t = ω
(tn
)+
t−1∑i=1
i∏j=1
(α(
t−j+1n
)v2
t−j + β(
t−j+1n
))ω(
t−in
)
+t∏
i=1
(α(
in
)v2
i−1 + β(
in
))σ2
0
(10)
Suppose u1 = argmax(α(u) + β(u)) then using strong law of large numbers as t → ∞,
t∏i=1
(α(
in
)v2
i−1 + β(
in
))σ2
0 ≤t∏
i=1
(α (u1) v2
i−1 + β (u1))σ2
0 → σ20exp(tγ∗) → 0
as γ∗ = E[log (α(u1)v2t + β(u1))] < 0 using Assumption 1(i). The proof of uniqueness of
the solution is similar to the proof of Proposition 1 of Dahlhaus and Subba Rao (2006).
The lower limit for σ2t is easy to obtain using the series.
Proof of Proposition 2.2. Notice that
Cov(ǫ2t , ǫ
2t+h) = Cov(σ2
t v2t , σ
2t+hv
2t+h).
Now the result can be proved using the expansion for σ2t as in (10) above and by using
Assumption 1(i). We omit the details.
18

Proof of Proposition 2.3. We can write
|ǫ2t − ǫ2
t (u0)| ≤∣∣∣ǫ2
t − ǫ2t
(tn
)∣∣∣+∣∣∣ǫ2
t
(tn
)− ǫ2
t (u0)∣∣∣ .
Now using Proposition 2.1 and equation (4),∣∣∣ǫ2
t − ǫ2t
(tn
)∣∣∣ =∣∣∣σ2
t − σ2t
(tn
)∣∣∣ v2t =
∣∣∣σ2t − σ2
t
(tn
)∣∣∣ v2t a.s., but
∣∣∣σ2t − σ2
t
(tn
)∣∣∣ ≤(α(
tn
)v2
t−1 + β(
tn
)) ( ∞∑i=1
∣∣∣(α(
tn
)v2
t−2 + β(
tn
)
+ Mn
(1 + v2
t−2)) i∏
j=3
(α(
t−j+1n
)v2
t−j + β(
t−j+1n
))ω(
t−in
)
−i∏
j=2
(α(
tn
)v2
t−j + β(
tn
))ω(
tn
)∣∣∣)
,
using Assumption 1(ii) (Lipschitz continuity of the parameters). Here we take M =
max(M1,M2,M3) andi−k∏j=i
(α(
tn
)v2
t−j + β(
tn
))= 1, ∀ k > 0. Proceeding in a similar way,
that is, replacing α(
t−j+1n
)and β
(t−j+1
n
)for each j with α
(tn
)and β
(tn
)successively
using Lipschitz continuity, after some algebra, we reach to
∣∣∣ǫ2t − ǫ2
t
(tn
)∣∣∣ ≤ Mv2t
n
(∞∑i=1
i−1∏j=1
(α(
tn
)v2
t−j + β(
tn
)) ((α(
t−i+1n
)i + ω
(tn
)(i − 1)
)v2
t−i
+(β(
t−i+1n
)i + ω
(tn
)(i − 1)
))+
∞∑i=3
i∑k=3
k−2∏l=1
(α( t
n)v2
t−l + β( tn))
× (1 + v2t−k+1)ω
(t−in
)(k − 2)
i∏j=k
(α( t−j+1
n)v2
t−j + β( t−j+1n
)))
Now suppose Q∗ = max (supu
ω(u), supu
α(u), supu
β(u)) < ∞ and
u1 = argmax(α(u) + β(u)). Then
∣∣∣ǫ2t − ǫ2
t
(tn
)∣∣∣ ≤ QnVt, where Q = MQ∗ and
Vt = v2t
∞∑i=1
i−1∏j=1
(α(u1)v2t−j + β(u1))(1 + v2
t−i)(2i − 1)
+v2t
∞∑i=3
i∑k=3
k−2∏l=1
(α(u1)v2t−l + β(u1))(1 + v2
t−k+1)(k − 2)i∏
j=k(α(u1)v
2t−j + β(u1))
It can be shown that Vt is a stationary ergodic process (Stout (1996), Theorem 3.5.8)
with,
E|Vt| ≤∞∑i=1
2(1 − δ)i−1(2i − 1) +∞∑i=3
i∑k=3
2(k − 2)(1 − δ)i−1 < ∞,
using Assumption 1 (i). In a similar way, we can show that
∣∣∣ǫ2t (
tn) − ǫ2
t (u0)∣∣∣ ≤ Q
∣∣∣ tn− u0
∣∣∣Vt.
19

Hence the proposition follows.
In the following lemmas, we prove the results for a general bandwidth h, so that the
results are applicable for both h1 and h2.
Lemma A.1. Let Zt be a sequence of ergodic random variables with E|Zt| < ∞.
Suppose that Assumption 2(ii) is satisfied. Then
(i)n∑
k=p+1
1nh
(uk − u0)iK
(uk−u0
h
)Zk
P→ hiµiE(Zt),
(ii)n∑
k=p+1
1nh
(uk − u0)iK2
(uk−u0
h
)Zk
P→ hiνiE(Zt), i = 1, 2, . . . , 2d.
where h is a bandwidth such that h → 0 and nh → ∞ as n → ∞.
Proof. The lemma can be proved using similar techniques as in Dahlhaus and Subba
Rao (2006, Lemmas A.1 and A.2). We omit the details.
Lemma A.2. Let the Assumptions 1 and 2 be satisfied. Then
(i)n∑
k=p+1
1nh
(uk − u0)iK
(uk−u0
h
)ǫ2lk−j1
ǫ2mk−j2
P→ hiµiE(ǫ2lk−j1
(u0)ǫ2mk−j2
(u0)),
∀ l,m ∈ 0, 1, 2 and j1, j2 ∈ 1, 2, . . . , p, j1 6= j2
(ii)n∑
k=p+1
1nh
(uk − u0)iK2
(uk−u0
h
)σ4
kǫ2lk−j1
ǫ2mk−j2
P→ hiνiE(σ4k(u0)ǫ
2lk−j1
(u0)ǫ2mk−j2
(u0)),∀ l,m ∈ 0, 1 and j1, j2 ∈ 1, 2, . . . , p,
where (ii) is true for l,m > 0 only if E|vt|8 < ∞.
Proof. (i) We will prove it for l = m = 2. Other cases can be similarly shown. Using
Lemma A.1 it is clear that
n∑k=p+1
1nh
(uk − u0)iK
(uk−u0
h
)ǫ2lk−j1
(u0)ǫ2mk−j2
(u0)
P→ hiµiE(ǫ2lk−j1
(u0)ǫ2mk−j2
(u0)).(11)
20

Now consider
n∑k=p+1
1nh
(uk − u0)iK
(uk−u0
h
) ∣∣∣ǫ4k−j1
(u0)ǫ4k−j2
(u0) − ǫ4k−j1
ǫ4k−j2
∣∣∣
≤n∑
k=p+1
1nh
(uk − u0)iK
(uk−u0
h
) (ǫ4k−j2
(u0)(ǫ2k−j1
(u0) + ǫ2k−j1
)
×∣∣∣ǫ2
k−j1(u0) − ǫ2
k−j1
∣∣∣ +ǫ4k−j1
(ǫ2k−j2
(u0) + ǫ2k−j2
)∣∣∣ǫ2
k−j2(u0) − ǫ2
k−j2
∣∣∣)
≤ Qhi+1R = OP (hi+1), where
R =n∑
k=p+1
1nh
(uk−u0
h)iK
(uk−u0
h
) (ǫ4k−j2
(u0)(ǫ2k−j1
(u0) + ǫ2k−j1
)(|uk−j1
−u0
h|
+ 1nh
)Vk−j1 +ǫ4
k−j1(ǫ2
k−j2(u0) + ǫ2
k−j2)(|uk−j2
−u0
h| + 1
nh
)Vk−j2
)
(using Proposition 2.3). Now using Proposition 2.3 for ǫ2k−j1
and ǫ2k−j2
in the expression
of R and Lemma A.1, it can be shown that E|R| < ∞. Hence using (11), the lemma
holds as n → ∞.
(ii) Using the form (5) of tvGARCH model, we can write
σ2t = α0(
tn) + α1(
tn)ǫ2
t−1 . . . + αpn( t
n)ǫ2
t−pn+ OP (ρpn)
where 0 < ρ < 1 and pn → ∞ as n → ∞. The parameter functions αj(u), j = 0, 1, . . . , pn
are bounded and continuous under the Assumption 2 (i). The result can be proved using
this form of σ2t in a similar way as in (i) above. We omit the details.
Lemma A.3. Under Assumptions 1 and 2,
1
nX⊤
1 W1X1P→ S ⊗ A1
where ⊗ denotes the Kronecker product.
Proof. Proof follows using the expansion of X⊤1 W1X1 and Lemma A.2 (i).
Lemma A.4. Suppose the Assumptions 1 and 2 are satisfied. In addition assume that
E|vt|8 < ∞. Then
V ar
(n∑
k=p+1(uk − u0)
iKh(uk − u0)(v2k − 1)σ2
k[1, ǫ2k−1, . . . , ǫ
2k−p]
⊤
)
= nh2i−1ν2iV ar(v2t )Ω(1 + oP (1)), i = 1, 2, . . . , d.
21

Proof. Let Ft−1 = σ(ǫ2t−1, ǫ
2t−2, . . .). Then
V ar
(n∑
k=p+1(uk − u0)
iKh(uk − u0)(v2k − 1)σ2
k[1, ǫ2k−1, . . . , ǫ
2k−p]
⊤
)
= E
(n∑
k=p+1(uk − u0)
2iK2h(uk − u0)V ar
((v2
k − 1)σ2k[1, ǫ
2k−1, . . . , ǫ
2k−p]
⊤|Fk−1
))
=
E
(n∑
k=p+1(uk − u0)
2iK2h(uk − u0)V ar(v2
k)(σ4
k[1, ǫ2k−1, . . . , ǫ
2k−p]
⊤[1, ǫ2k−1, . . . , ǫ
2k−p]
))
= nh2i−1ν2iV ar(v2t )Ω(1 + oP (1)), (using Lemma A.2(ii))
Proof of Theorem 4.1. Let us denote β1 = [α00, α01, . . . , α0d, . . . , αp0, . . . , αpd]⊤. Using
Taylor’s series expansion, we can write,
Y1 = X1
[α0(u0), α
(1)0 (u0), . . .
α(d)0 (u0)
d!, α1(u0), . . . , αp(u0), . . .
α(d)p (u0)
d!
]⊤
+1
(d + 1)!
α(d+1)0 (ζ0(p+1))(up+1 − u0)
d+1
...
α(d+1)0 (ζ0(n))(un − u0)
d+1
+1
(d + 1)!
p∑
j=1
α(d+1)j (ζj(p+1))(up+1 − u0)
d+1ǫ2p+1−j
...
α(d+1)j (ζj(n))(un − u0)
d+1ǫ2n−j
+σ2 ∗ (v2 − en−p)
where σ2 = [σ2p+1, σ
2p+2, . . . , σ
2n]⊤, v2 = [v2
p+1, v2p+2, . . . , v
2n]⊤, ∗ denotes the component
wise product3 of vectors and ζjk, j = 0, 1, . . . , p, k = p + 1, . . . , n are between uk and u0.
Multiplying both sides by (X⊤1 W1X1)
−1X⊤1 W1,
β1(u0) = β1(u0) +1
(d + 1)!(X⊤
1 W1X1)−1X⊤
1 W1
×
α(d+1)0 (ζ0(p+1))(up+1 − u0)
d+1
...
α(d+1)0 (ζ0(n))(un − u0)
d+1
+
1
(d + 1)!
p∑
j=1
(X⊤1 W1X1)
−1X⊤1 W1
×
α(d+1)j (ζj(p+1))(up+1 − u0)
d+1ǫ2p+1−j
...
α(d+1)j (ζj(n))(un − u0)
d+1ǫ2n−j
+ (X⊤
1 W1X1)−1X⊤
1 W1(σ2 ∗ (v2 − en−p)). (12)
Now it is not difficult to show using Lemma A.2 (i) that
X⊤1 W1
α(d+1)0 (ζ0(p+1))(up+1 − u0)
d+1
...
α(d+1)0 (ζ0(n))(un − u0)
d+1
3Let x = [x1, x2, . . . , xp]⊤ and y = [y1, y2, . . . , yp]
⊤, then x ∗ y = [x1y1, x2y2, . . . , xpyp]⊤.
22

= nhd+11 α
(d+1)0 (u0)[1, e
⊤p w2]
⊤(1 + oP (1)) ⊗ D1,
X⊤1 W1
α(d+1)j (ζj(p+1))(up+1 − u0)
d+1ǫ2p+1−j
...
α(d+1)j (ζj(n))(un − u0)
d+1ǫ2n−j
= nhd+11 α
(d+1)j (u0)[w2, Cj−1, . . . , Cj−p]
⊤(1 + oP (1)) ⊗ D1,
and using Lemma A.3,
(X⊤1 W1X1)
−1 = (1/n)S−1(1 + oP (1)) ⊗ A−11 .
Hence, the asymptotic bias is given as,
E(β1(u0) − β1(u0))
=hd+11
(d+1)!
(α
(d+1)0 (u0)(S
−1 ⊗ A−11 )[(1, w2e
⊤p ]⊤ ⊗ D1)
+p∑
j=1α
(d+1)j (u0)(S
−1 ⊗ A−11 )([w2, Cj−1, . . . , Cj−p]
⊤ ⊗ D1))
+ oP (hd+11 ).
Notice that C0 = w4. Now
E(β1(u0) − β1(u0))
=hd+11
(d+1)!(S−1 ⊗ A−1
1 )((
α(d+1)0 (u0)[1, w2e
⊤p ]⊤
+p∑
j=1α
(d+1)j (u0)[w2, Cj−1, . . . , Cj−p]
⊤)⊗ D1
)+ oP (hd+1
1 )
=hd+11
(d+1)!(S−1 ⊗ A−1
1 )(S[α
(d+1)0 (u0), α
(d+1)1 (u0), . . . , α
(d+1)p (u0)]
⊤ ⊗ D1
)
+ oP (hd+11 )
=hd+11
(d+1)!
([α
(d+1)0 (u0), α
(d+1)1 (u0), . . . , α
(d+1)p (u0)]
⊤ ⊗ A−11 D1
)+ oP (hd+1
1 )
Notice that Bias (αj(u0))= e⊤j(d+1)+1,(p+1)(d+1) Bias (β1(u0)). Hence the bias expression is
obtained.
Now the asymptotic variance is
V ar(β1(u0))= (1/n)(S−1(1 + oP (1)) ⊗ A−1
1 )V ar(X⊤1 W1(σ
2 ∗ (v2 − en−p)))× (1/n)(S−1(1 + oP (1)) ⊗ A−1
1 ).= (1/n)(S−1(1 + oP (1)) ⊗ A−1
1 )((n/h1)V ar(v2t )Ω(1 + oP (1)) ⊗ B1)
× (1/n)(S−1(1 + oP (1)) ⊗ A−11 ).
using Lemma A.4. The desired expression can be obtained after some simplification using
the properties of Kronecker product.
23

Lemma A.5. Suppose that the Assumptions 1 and 2 are satisfied. Then
(i) 1nh2
n∑t=2
(ut − u0)iK(ut−u0
h2)σ2
t−1P→ hi
2µiλ1
(ii) 1nh2
n∑t=2
(ut − u0)iK(ut−u0
h2)σ2
t−1ǫ2t−1
P→ hi2µiλ2
(iii) 1nh2
n∑t=2
(ut − u0)iK(ut−u0
h2)σ4
t−1P→ hi
2µiλ3
Proof. (i) It is evident from (12) (in the proof of Theorem 4.1) that for j = 0, 1, . . . , p
αj(u0) = δj(u0) + e⊤j(d+1)+1,(p+1)(d+1)(X⊤1 W1X1)
−1X⊤1 W1(σ
2 ∗ (v2 − en−p)).
Therefore
σ2t−1 = δ0(ut−1) +
p∑j=1
δj(ut−1)ǫ2t−j−1 + R∗
1, (13)
where, R∗1 = (e⊤1,(p+1)(d+1) +
p∑j=1
e⊤j(d+1)+1,(p+1)(d+1)ǫ2t−j)
× (X⊤1 W1X1)
−1X⊤1 W1(σ
2 ∗ (v2 − en−p))
Clearly, E(R∗1) = 0. Here δj(·)’s are continuous functions. Substituting this expression
for σ2t−1 (13) in (i), and by using Lemma A.2, the result can be proved. Here,
1nh2
n∑t=2
(ut − u0)iK(ut−u0
h2)σ2
t−1
= 1nh2
n∑t=2
(ut − u0)iK(ut−u0
h2)(δ0(ut−1) +
p∑j=1
δj(ut−1)ǫ2t−j)
+ 1nh2
n∑t=2
(ut − u0)iK(ut−u0
h2)R∗
1.
Now the first term of the above expression converges in probability to hi2µiE(δ0(ut−1) +
p∑j=1
δj(ut−1)ǫ2t−j(u0)) = hi
2µiλ1. Now using the similar methodology as in Lemma A.2, it
can be shown that
1nh2
n∑t=2
(ut − u0)iK(ut−u0
h2)ǫ2l
t−jσ2t (v
2t − 1)
P→ hi2µiE(ǫ2l
t−j(u0)σ2t (u0)(v
2t − 1))
= 0, l ∈ 0, 1, j = 1, 2, . . . , p.
This implies that X⊤1 W1σ
2(v2 − en−p)P→ 0. Therefore, using Lemma A.3, R∗
1P→ 0. Hence
the proof follows. Other parts of the lemma can be proved similarly.
Lemma A.6. Suppose that the Assumptions 1 and 2 are satisfied.
1nX⊤
2 W2X2P→ S2 ⊗ A2
Proof. Notice that
X⊤2 W2X2 =
n∑t=2
Kh2(ut − u0)([1, ǫ2
t−1, σ2t−1]
⊤[1, ǫ2t−1, σ
2t−1] ⊗ U⊤
t Ut
).
24

Hence the result can be easily proved using Lemma A.5.
Lemma A.7. Under the similar assumptions as in Lemma A.4,
V ar
(n∑
k=p+1(uk − u0)
iKh2(uk − u0)(v2k − 1)σ2
k[1, ǫ2k−1, σ
2k−1]
)
= nh2i−12 ν2iV ar(v2
t )Ω2(1 + oP (1)), i = 1, 2, . . . , d.
Proof. This can be proved in a similar way as Lemma A.4 using (13). We omit the
details.
Proof of Theorem 4.2. Denote
β2 = (ω02, ω12, . . . , ωd2, a02, . . . , ad0, b02, . . . , bd2). Using Taylor’s series expansion in (8),
β2(u0) = β2(u0) +1
(d + 1)!(X⊤
2 W2X2)−1X⊤
2 W2
ω(d+1)(ξ02)(u2 − u0)d+1
...ω(d+1)(ξ0n)(un − u0)
d+1
+1
(d + 1)!(X⊤
2 W2X2)−1X⊤
2 W2
α(d+1)(ξ12)(u2 − u0)d+1ǫ2
1...α(d+1)(ξ1n)(un − u0)
d+1ǫ2n−1
+1
(d + 1)!(X⊤
2 W2X2)−1X⊤
2 W2
β(d+1)(ξ22))(u2 − u0)d+1σ2
1...β(d+1)(ξ2n)(un − u0)
d+1σ2n−1
−(X⊤2 W2X2)
−1X⊤2 W2
β(u2)(b0(u1) +p∑
j=1bj(u1)ǫ
21−j)
...
β(un)(b0(un−1) +p∑
j=1bj(un−1)ǫ
2n−1−j)
+(X⊤2 W2X2)
−1X⊤2 W2(σ
2 ∗ (v22 − en−1)),
where ξ0t, ξ1t and ξ2t are between ut and u0. Here v22 = [v2
2, . . . , v2n]⊤ and σ2
2 = [σ22, . . . , σ
2n]⊤.
We ignore the term O(ρpn) (see Corollary 4.2) as it is negligible asymptotically. Now using
Lemmas 6.2 and 6.5, it can be shown that
X⊤2 W2
ω(d+1)(ξ02)(u2 − u0)d+1
...ω(d+1)(ξ0n)(un − u0)
d+1
= nhd+12 ω(d+1)(u0)[1, w2, λ1]
⊤(1 + oP (1)) ⊗ D2,
25
X⊤2 W2
α(d+1)(ξ12))(u2 − u0)d+1ǫ2
1...α(d+1)(ξ1n)(un − u0)
d+1ǫ2n−1
= nhd+12 α(d+1)(u0)[w2, w4, λ2]
⊤(1 + oP (1)) ⊗ D2,
X⊤2 W2
β(d+1)(ξ22))(u2 − u0)d+1σ2
1...β(d+1)(ξ2n)(un − u0)
d+1σ2n−1
= nhd+12 β(d+1)(u0)[λ1, λ2, λ3]
⊤(1 + oP (1)) ⊗ D2
and
X⊤2 W2
β(u2)(b0(u1) +p∑
j=1bj(u1)ǫ
21−j)
...
β(un)(b0(un−1) +p∑
j=1bj(un−1)ǫ
2n−1−j)
= β(u0)[λ1b, λ2b, λ3b)(1 + oP (1)]⊤ ⊗ D∗.
Using Lemma A.6,
(X⊤2 W2X2)
−1 = (1/n)S−12 (1 + oP (1)) ⊗ A−1
2 .
Therefore,
Bias(β2(u0))
=hd+12
(d+1)!(S−1
2 (1 + oP (1)) ⊗ A−12 )
((ω(d+1)(u0)[1, w2, λ1]
⊤
+ α(d+1)(u0)[w2, w4, λ2]⊤ + β(d+1)(u0)[λ1, λ2, λ3]
⊤)
(1 + oP (1)) ⊗ A−12 D
)
− β(u0)S−12 [λ1b, λ2b, λ3b]
⊤ ⊗ A−12 D∗ + oP (hd+1
2 )
=hd+12
(d+1)!(S−1
2 ⊗ A−12 )
((S2[ω
(d+1)(u0), α(d+1)(u0), β
(d+1)(u0)]⊤) ⊗ D2
)
− β(u0)S−12 [λ1b, λ2b, λ3b]
⊤ ⊗ A−12 D∗ + oP (hd+1
2 )
=hd+12
(d+1)![ω(d+1)(u0), α
(d+1)(u0), β(d+1)(u0)]
⊤ ⊗ A−12 D2
− β(u0)S−12 [λ1b, λ2b, λ3b]
⊤ ⊗ A−12 D∗ + oP (hd+1
2 ).
The bias expressions can be obtained after some simplification by using
Bias(ω(u0)) = e⊤1,3(d+1)Bias(β2(u0)), Bias(α(u0)) = e⊤d+1,3(d+1)Bias(β2(u0))
and Bias(β(u0)) = e⊤2d+3,3(d+1)Bias(β2(u0)).
Now using Lemma A.7
V ar(β2(u0)) = (1/n)S−12 (1 + oP (1)) ⊗ A−1
2 V ar(X⊤2 W2(σ
2 ∗ (v2 − en−p)))× (1/n)S−1
2 (1 + oP (1)) ⊗ A−12
= 1nh2
V ar(v2t )(S
−12 ⊗ A−1
2 )(Ω2 ⊗ B2)(S−12 ⊗ A−1
2 )(1 + oP (1)).
26

The variance expression given in Theorem 4.2 can be arrived at after some simplification.
Appendix B
To make the cross validation bandwidth selection computationally feasible, we derive
a relation between the (ω, α, β) and (ω−t, α−t, β−t) in Proposition B.1. The idea is simi-
lar to the generalized cross validation, which simplifies the intensive computation involved
in the original cross validation (see Wabha (1977), Li and Palta (2009)).
Proposition B.1. Let β2(u0) be the local polynomial estimator of β2(u0) where β2 =
(ω02, ω12, . . . , ωd2, a02, . . . , ad0, b02, . . . , bd2). Suppose that β−t2 (u0) denotes the leave one
out (obtained by eliminating the tth observation) estimators of β2(u0). Then,
β−i2 (u0) =
(β2(u0) − (X⊤
2 W2X2)−1X⊤
2 W2I∗i Y2
)
+Zi
(β2(u0) − (X⊤
2 W2X2)−1X⊤
2 W2I∗i Y2
) (14)
where Zi = (X⊤2 W2X2)
−1X⊤2 W2
(In−1 + I∗
i X2(X⊤2 W2X2)
−1X⊤2 W2
)−1I∗i X2 and I∗
i de-
notes a matrix of order (n − 1) × (n − 1) with (i, i)th element as one and rest of them
as zero. Now ω−i(u0) = e1,3(d+1)β−i2 (u0), α−i(u0) = ed+1,3(d+1)β
−i2 (u0) and β−i(u0) =
e2d+3,3(d+1)β−i2 (u0).
Notice that to compute (9), we need to fit the model just once based on the original
sample (to obtain β2(u0)). The estimators, (ω−i(u0), α−i(u0), β−i(u0)) can then be easily
computed using the relation (14). This computation is easy and straightforward as we
do not require to delete the data points from the original sample and refit the model.
All we need is to change I∗i for each i, which can be done easily using a simple program.
Thus the relation (14) facilitates the bandwidth selection and saves enormous amount of
computing time.
Proof of Proposition B.1. Let Ip denote the identity matrix of order p. Define
the matrices
Ji =
I(i−1) 0(i−1)×(n−i−1)
01×(i−1) 01×(i−1)×(n−i−1)
0(n−i−1)×(i−1) I(n−i−1)×(n−i−1)
(n−1)×(n−2)
, i = 2, . . . , n − 1,
J1 =
[01×(n−2)
In−2
]
(n−1)×(n−2)
, Jn =
[In−2
01×(n−2)
]
(n−1)×(n−2)
.
27

Let W−i2 denote the matrix W2 with ith row and ith column deleted. Similarly, suppose
X−i2 and Y −i
2 denote the X2 and Y2 with ith row omitted. It is obvious that
X−i2 = J⊤
i X2, W−i2 = J⊤
i W2Ji and Y −i2 = J⊤
i Y2.
Now, notice that J⊤i Ji = In−2 and JiJ
⊤i = In−1−I∗
i . Using these relations and after some
algebra, it can be shown that,
X−i⊤2 W−i
2 X−i2 = X⊤
2 W2X2 − X⊤2 W2I
∗i X2
and
X−i⊤2 W−i
2 Y −i2 = X⊤
2 W2Y2 − X⊤2 W2I
∗i Y2.
Therefore, using the Woodbury formula,4
(X−i⊤2 W−i
2 X−i2 )−1 = (X⊤
2 W2X2)−1 + Zi(X
⊤2 W2X2)
−1,
where Zi is as defined in Proposition B.1. After some algebraic simplification, this leads
toβ−i
2 (u0) = (X−i⊤2 W−i
2 X−i2 )−1X−i⊤
2 W−i2 Y −i
2
=(β2(u0) − (X⊤
2 W2X2)−1X⊤
2 W2I∗i Y2
)
+ Zi
(β2(u0) − (X⊤
2 W2X2)−1X⊤
2 W2I∗i Y2
).
Appendix C
In this appendix, we provide the definitions of the GARCH models used in Section 5.
The return process ǫt with E(ǫt|Ft−1) = 0 and E(ǫ2t |Ft−1) = σ2
t , is said to follow
(i) a GARCH process, if
σ2t = ω + αǫ2
t−1 + βσ2t−1,
where ω, α, β > 0,
(ii) an EGARCH process if
log σ2t = ω + α
∣∣∣∣∣ǫt−1
σt−1
∣∣∣∣∣−√
2
π
+ γ
ǫt−1
σt−1
+ β log σ2t−1,
4Let Ap×p, Bp×q and Cq×p denotes the matrices, then according to the Woodbury formula,
(A + BC)−1 = A−1 −(A−1B(Ip + CA−1B)−1CA−1
)
where Ip denotes the identity matrix.
28
(iii) a GJR process if
σ2t = ω + αǫ2
t−1 + βσ2t−1 + γI[ǫt<0]ǫ
2t−1,
where ω, α, β, γ > 0,
(iv) a FIGARCH (1,d0,1) process if
σ2t = ω +
∞∑
i=1
λiǫ2t−1
whereδ1 = d0
λ1 = φ − β + d0
δi = i−1−d0
iδi−1, i = 1, 2, . . .
λi = βλi−1 + δi − φδi−1, i = 2, 3, . . . .
and ω, φ, β > 0, 0 < d0 < 1.
References
Amado, C. and Terasvirta, T. (2008). Modeling conditional and unconditional het-
eroskedasticity with smoothly time-varying structure. working paper series in Economics
and Finance NIPE WP 3 / 2008, Universidade do Minho.
Baillie, R. (1996). Long memory processes and fractional integration in econometrics. J.
Econometrics 73, 5-59.
Bose, A. and Mukherjee, K. (2003). Estimating the ARCH parameters by solving linear
equations. J. Time Series Anal. 24, 127-136.
Bose, A. and Mukherjee, K. (2009). Bootstrapping a weighted linear estimator of the
ARCH parameters. J. Time Series Anal. 30, 315-331.
Chen, B. and Hong, Y. (2009). Detecting for smooth structural changes in GARCH
models. Working paper.
Cizek, P. and Spokoiny, V. (2009). Varying coefficient GARCH models. In Handbook
of Financial Time Series (Edited by T. G. Andersen, R. A. Davis, J. P. Kreib and T.
Mikosch), 169-186. Springer-Verlag, Berlin Heidelberg.
Dahlhaus, R. and Subba Rao, S. (2006). Statistical inference for time-varying ARCH
processes. Ann. Statist. 34, 1075-1114.
Engle, R.F. and Ng, V.K. (1993). Measuring and testing the impact of news on volatility.
29
Journal of Finance 48, 1749-1778.
Fan, J. and Gijbels, I. (1996). Local Polynomial Modeling and Its Applications. Chapman
and Hall, London.
Fan, J. and Zhang, W. (1999). Statistical estimation in varying coefficient models. Ann.
Statist. 27, 1491-1518.
Franke, J. and Kreiss, J.P. (1992). Bootstrapping stationary autoregressive moving av-
erage models. J. Time Series Anal. 13, 297-317.
Fryzlewicz, P., Sapatinas, T. and Subba Rao, S. (2008). Normalized least-squares esti-
mation in time-varying ARCH models. Ann. Statist. 36, 742-786.
Hart, J. D. (1994). Automated kernel smoothing of dependent data by using time series
cross- validation. J. R. Stat. Soc. Ser. B Stat. Methodol. 56, 529-542.
Li, J. and Palta, M. (2009). Bandwidth selection through cross-validation for semi-
parametric varying-coefficient partially linear models. J. Stat. Comput. Simul. 79,
1277-1286.
Mercurio, D. and Spokoiny, V. (2004). Statistical inference for time-inhomogeneous
volatility models. Ann. Statist. 32, 577-602.
Mikosch, T. and Starica, C. (2004). Nonstationarities in financial time series, the long-
range dependence and the IGARCH effects. Rev. Econ. Statist. 86, 378-390.
Nelson, D. B. (1990). Stationarity and persistence in the GARCH (1,1) model. Econo-
metric Theory 6, 318-334.
Palm, F. C. (1996). GARCH models for volatility. In Handbook of Statistics (Edited by
G. S. Maddala and C. R. Rao). 14, 209-240. Elsevier Science, North Holand.
Shephard, N. (1996). Statistical aspects of ARCH and stochastic volatility. In Time
Series Models in Econometric, Finance and Other Fields (Edited by D. R. Cox, D. V.
Hinkleyand O. E. Barndorff-Nielsen). Chapman and Hall, London.
Starica, C. and Granger, C.W.J. (2005). Non-stationarities in stock returns. Rev. Econ.
Statist. 8, 503-522.
Stout, W. (1996). Almost Sure Convergence. Academic Press, New York.
Wabha, N. (1977). A survey of some smoothing problems and the method of generalized
cross-validation for solving them. In Applications of Statistics (Edited by P.R. Krishna-
iah). North-Holland, Amsterdam.
Wand, M. P. and Jones, M. C. (1995). Kernel Smoothing. Chapman and Hall, London.
30
Table 1: Summary statistics of the datasets
Series Sample Mean Standard Minimum Quantile 1 Median Quantile 3 Maximumsize deviation
INR/USD 2765 0.0004 0.1754 −1.6127 −0.0553 0.0000 0.0498 1.7104INR/EURO 2805 0.0103 0.6638 −4.1176 −0.3804 0.0000 0.3987 4.5343CNY/USD 2767 −0.0036 0.0381 −0.8767 −0.0032 0.0000 0.0010 0.4283
CNY/EURO 2806 0.0005 0.2886 −1.9487 −0.1616 0.0004 0.1641 1.8262BRL/USD 2766 −0.0013 0.4728 −4.1989 −0.2240 −0.0105 0.2059 3.2796
BRL/EURO 2806 0.0026 0.5668 −6.0820 −0.2764 −0.0090 0.2683 6.1018RUB/EURO 2815 0.0059 0.2612 −1.2866 −0.1277 0.0000 0.1255 1.8967RND/EURO 2815 0.0054 0.4612 −3.6862 −0.2579 −0.0164 0.2372 3.3931
S & P 500 2766 −0.0014 0.5969 −4.1126 −0.2703 0.0230 0.2695 4.7586Dow Jones 2767 0.0004 0.5609 −3.5614 −0.2507 0.0182 0.2559 4.5637
BSE 2724 0.0213 0.7527 −5.1287 −0.3301 0.0588 0.4134 6.9444NSE 2101 0.0381 0.7545 −5.6692 −0.2866 0.0513 0.4157 7.0939
31
Table 2: Aggregated mean squared errors of the ‘in sample forecasts’
Series tvGARCH tvGARCH tvARCH (1) tvARCH (2) GARCH EGARCH GJR FIGARCH(d = 3) (d = 1)
INR/USD 35.59 35.12 36.37 33.27 40.23 38.03 40.26 38.68INR/EURO 2119.02 2162.22 2158.96 2137.97 2234.45 2524.83 2234.46 2249.93CNY/USD 0.72 0.72 0.74 0.71 1.03 − 1.22 0.96
CNY/EURO 76.64 77.58 80.12 79.75 84.02 84.17 84.55 85.73BRL/USD 1174.72 1197.15 1276.72 1117.56 1249.60 1163.88 1312.59 1221.22
BRL/EURO 3563.09 3603.22 4295.43 3844.53 4942.11 4402.06 5320.83 4861.54RUB/EURO 65.27 65.36 68.77 68.34 73.98 72.81 74.04 69.34RND/EURO 935.43 940.02 977.31 966.16 993.15 981.79 1016.55 989.07
S & P 500 2154.41 2620.90 2979.67 2652.07 2614.41 2476.76 2679.29 2572.90Dow Jones 1715.59 2063.03 2330.29 2067.89 2075.91 1951.45 2125.98 2025.00
BSE 5688.85 5702.34 6170.73 6026.22 6358.63 6095.25 6539.42 6381.01NSE 6205.13 6244.79 6764.44 6556.36 7134.17 6765.58 7398.32 7112.78
32
Table 3: Aggregated mean squared errors of the monthly volatility forecasts
Series tvGARCH tvGARCH tvARCH (1) tvARCH (2) GARCH EGARCH GJR FIGARCH(d = 3) (d = 1)
INR/USD (×10−5) 5.9571 6.2781 6.3978 6.0262 7.4865 7.5525 7.6340 7.5385INR/EURO (×10−4) 1.4162 1.5060 1.6407 1.5872 1.8460 1.8557 1.8557 1.8806CNY/USD (×10−7) 2.5545 3.0306 3.0607 3.0216 4.3104 3.3115 4.2701 4.8166
CNY/EURO (×10−4) 1.4054 1.5678 1.6280 1.5514 1.9860 1.6661 1.9820 1.9929BRL/USD 0.0029 0.0031 0.0031 0.0030 0.0040 0.0037 0.0052 0.0048
BRL/EURO 0.0108 0.0120 0.0119 0.0118 0.0136 0.0136 0.0133 0.0135RUB/EURO (×10−4) 4.0295 4.3653 4.3969 4.4216 5.8115 6.5392 5.8298 5.5266
RND/EURO 0.0121 0.0131 0.0130 0.0128 0.0149 0.0147 0.0149 0.0149S & P 500 0.0079 0.0085 0.0085 0.0079 0.0125 0.0151 0.0180 0.0137Dow Jones 0.0047 0.0051 0.0052 0.0047 0.0065 0.0065 0.0148 0.0085
BSE 0.0205 0.0216 0.0217 0.0204 0.0245 0.0244 0.0245 0.0245NSE 0.0147 0.0161 0.0161 0.0149 0.0187 0.0173 0.0187 0.0187
33
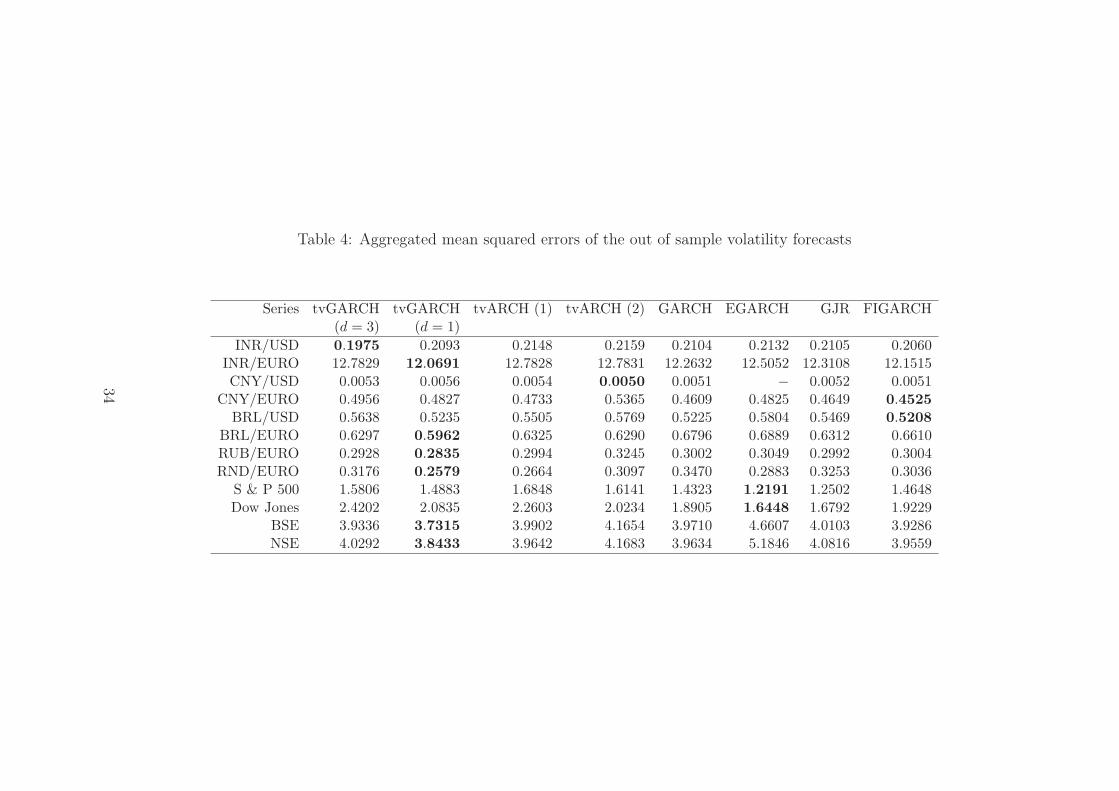
Table 4: Aggregated mean squared errors of the out of sample volatility forecasts
Series tvGARCH tvGARCH tvARCH (1) tvARCH (2) GARCH EGARCH GJR FIGARCH(d = 3) (d = 1)
INR/USD 0.1975 0.2093 0.2148 0.2159 0.2104 0.2132 0.2105 0.2060INR/EURO 12.7829 12.0691 12.7828 12.7831 12.2632 12.5052 12.3108 12.1515CNY/USD 0.0053 0.0056 0.0054 0.0050 0.0051 − 0.0052 0.0051
CNY/EURO 0.4956 0.4827 0.4733 0.5365 0.4609 0.4825 0.4649 0.4525
BRL/USD 0.5638 0.5235 0.5505 0.5769 0.5225 0.5804 0.5469 0.5208
BRL/EURO 0.6297 0.5962 0.6325 0.6290 0.6796 0.6889 0.6312 0.6610RUB/EURO 0.2928 0.2835 0.2994 0.3245 0.3002 0.3049 0.2992 0.3004RND/EURO 0.3176 0.2579 0.2664 0.3097 0.3470 0.2883 0.3253 0.3036
S & P 500 1.5806 1.4883 1.6848 1.6141 1.4323 1.2191 1.2502 1.4648Dow Jones 2.4202 2.0835 2.2603 2.0234 1.8905 1.6448 1.6792 1.9229
BSE 3.9336 3.7315 3.9902 4.1654 3.9710 4.6607 4.0103 3.9286NSE 4.0292 3.8433 3.9642 4.1683 3.9634 5.1846 4.0816 3.9559
34
INR/USD
0 500 1500 2500
−1
.50
.01
.0
INR/EURO
0 500 1500 2500
−4
−2
02
4
CNY/USD
0 500 1500 2500
−0
.8−
0.2
0.2
CNY/EURO
0 500 1500 2500
−2
−1
01
BRL/USD
0 500 1500 2500
−4
−2
02
BRL/EURO
0 500 1500 2500
−6
−2
24
6
RUB/EURO
0 500 1500 2500
−1
.00
.01
.02
.0
RND/EURO
0 500 1500 2500
−3
−1
13
S & P 500
0 500 1500 2500
−4
−2
02
4
Dow Jones
0 500 1500 2500
−2
02
4
BSE
0 500 1500 2500
−4
02
46
NSE
0 500 1000 2000
−6
−2
24
6
Figure 1: Plot of the percentage log returns
35
0 5 10 20 30
0.0
0.4
0.8
INR/USD
acf
0 5 10 20 30
0.0
0.4
0.8
INR/EUROa
cf
0 5 10 20 30
0.0
0.4
0.8
CNY/USD
acf
0 5 10 20 30
0.0
0.4
0.8
CNY/EURO
acf
0 5 10 20 30
0.0
0.4
0.8
BRL/USD
acf
0 5 10 20 30
0.0
0.4
0.8
BRL/EUROa
cf
0 5 10 20 30
0.0
0.4
0.8
RUB/EURO
acf
0 5 10 20 30
0.0
0.4
0.8
RND/EURO
acf
0 5 10 20 30
0.0
0.4
0.8
S & P 500
acf
0 5 10 20 30
0.0
0.4
0.8
Dow Jones
acf
0 5 10 20 30
0.0
0.4
0.8
BSE
acf
0 5 10 20 30
0.0
0.4
0.8
NSE
acf
Figure 2: Autocorrelation functions of the squared returns
36
tvGARCH
vola
tility
0 500 1000 2000
010
2030
FIGARCH
vola
tility
0 500 1000 2000
010
2030
EGARCH
vola
tility
0 500 1000 2000
010
2030
GARCH
vola
tility
0 500 1000 2000
010
2030
Figure 3: In sample volatility forecasts for the BRL/EURO data
37
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.1
0.2
0.3
0.4
0.5
u
omeg
a
0.0 0.2 0.4 0.6 0.8 1.0
−0.2
0.0
0.2
0.4
0.6
u
alph
a
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.5
1.0
u
beta
0.0 0.2 0.4 0.6 0.8 1.0
0.2
0.4
0.6
0.8
u
alph
a+be
ta
Figure 4: Plot of the estimators of the parameter functions for the BSE data
38




















