
Using the k-Nearest Problems for Adaptive Multicriteria Planning

Ann Oper ResDOI 10.1007/s10479-007-0228-7
Multicriteria optimisation and simulation: an industrialapplication
D. Duvivier · O. Roux · V. Dhaevers · N. Meskens ·A. Artiba
© Springer Science+Business Media, LLC 2007
Abstract This paper deals with multicriteria discrete-continuous problems of schedulingnonpreemptable jobs. The need for reusability and modularity leads us to build a “generic”optimisation and simulation framework, while the need to quickly generate good compro-mises between conflicting objectives requires the implementation of multicriteria schedulingmodels. This paper describes the practical possibilities of three hybrid models within thisframework. The validation of the framework is presented in terms of its application to areal, highly constrained, discrete-continuous problem. The optimisation model is based onthe hybridisation of a classical hill-climber meta-heuristic with the Promethee II multicrite-ria method.
Keywords Stochastic optimisation · Multicriteria decision-making · Simulation ·Scheduling · Performance improvement
Scheduling problems (Carlier and Chrétienne 1988; Pinedo 1995; Pinedo and Chao 1999)occur in a lot of application fields. In the particular context of discrete or discrete-continuousproduction processes, we are developing a “generic” framework dedicated to the optimisa-tion and simulation of real-life multicriteria planning and scheduling problems. When con-sidering these problems, it clearly appears that exact methods are limited in the size of theproblems they can handle because of their time/space requirements. More specifically, an ar-gument against exact methods based on mathematical models is the difficulty of translatingthe reality into a mathematical-model-based formalism.
D. Duvivier (�)L.I.L., Université du Littoral Cote d’opale, 50 Rue Ferdinand Buisson, BP 719, 62228 Calais Cedex,Francee-mail: [email protected]
O. Roux · V. Dhaevers · N. MeskensCatholic University of Mons, Mons, Belgium
A. ArtibaE.T.S., Montréal, Canadae-mail: [email protected]

Ann Oper Res
In the light of these facts, our framework is mainly based on several hybrid models com-posed of a simulator and several optimisation tools. The simulation model is used to captureall the details of the functioning of real-life problems (Iassinovski et al. 2003; Duvivier etal. 2003). In this paper, we focus on dispatching rules and hill-climbers as simple optimi-sation methods to be hybridised with our simulation model. In many applications, it hasbeen shown that the hybridisation of simple methods such as local search techniques withan additional mechanism, which aims at avoiding being trapped by poor local optima, canimprove the efficiency and efficacy of simple isolated algorithms (Jain and Meeran 1999;Hoos and Stützle 2005; Rayward-Smith et al. 1996).
We are perfectly aware that, when it comes to assessing the solutions found with thesemethods, there are some limitations in the theoretical results. However, we think that hybridmethods might provide some useful tools for addressing real-life problems. Another argu-ment for this kind of hybrid is the need for reactivity. Indeed, the speed of decision-makingcan be crucial in the context of present-day competitiveness. An “effective” solution is notnecessarily an optimal solution but rather a “good” solution obtained in a small amount oftime (compatible with the reactivity constraints mentioned above). Finally, when tacklingreal-life problems, the objective is rarely to optimise one criterion or to find a global op-timum. In most cases the objective is to balance criteria to generate a good compromisebetween conflicting criteria. In this paper, our aim is to optimise several criteria simultane-ously, as described in Sect. 1.3.
Previous work on the integration of multicriteria methods into optimisation and simula-tion tools has already been published, but to the best of our knowledge this is the first timethat an hybrid model, including the simulation of the scheduling of an actual highly con-strained discrete-continuous problem and Promethee II (Preference Ranking OrganisationMETHod for Enrichment Evaluations), has been presented. In addition to the hybridisationof methods derived from several different fields (modelling, optimisation, simulation andperformance), one of the original aspects of our work is that we take into account auxil-iary resources in the simulation model. This describes the context for the validation of ourframework.
In the remainder of this paper, our hybrid models are applied to optimise the schedulingpart of a real-life problem based on the Fontainunion plant (in Fontaine-Lévêque, Belgium).This plant produces high quality steel wires and strands that are used in pre-stressed con-crete and major civil engineering projects (such as oilrigs, bridges, airports, stadiums andhotels) all over the world. The process is composed of continuous and discrete operations.Planning is carried out by an ERP (Enterprise Requirement Planning) system, so we focusour description on the scheduling part of the problem.
The rest of this paper is organised as follows. In Sect. 1 we present our framework.In Sect. 2, we describe the Fontainunion problem. In Sect. 3, we set out the results of ouranalysis. Finally, in Sect. 4 we present our conclusions and discuss some of the issues arisingfrom this work.
1 The PlanOrdo framework
1.1 Description
The aim of our framework, named PlanOrdo, is to provide decision-makers with a frame-work for optimisation and simulation of discrete-continuous planning and scheduling prob-lems. Using a divide-and-conquer paradigm, our framework is based on a model composed

Ann Oper Res
of several cooperating sub-models: at least one of them is dedicated to simulation and an-other one deals with the optimisation aspects of the whole problem. In the project describedhere, the field of research is generalised job-shop planning and scheduling problems.
The basic aim of our framework is to provide an environment to be used as a test-bed forcomparing the performance of different multicriteria scheduling strategies. Each schedul-ing strategy is composed of a dispatching rule—providing an initial solution/schedule—enhanced by an optimisation method. The results of five scheduling strategies are comparedto the results of dispatching rules used without optimisation.
In order to compare and rank the results of the scheduling strategies on the basis ofseveral criteria, PlanOrdo embeds a lexicographical sort or the Promethee II multicriteriamethod (Pomerol and Barba-Romero 2000).
The simulation model is based on the RAO simulator (Artiba et al. 1998). Generallyspeaking, our RAO simulation model is composed of a generic set of patterns definingthe functioning of common/generic resources, plus some specific patterns dedicated to theFontainunion problem.
The graphical user interface of PlanOrdo controls several units, which are briefly de-scribed below. The scheduling unit comprises a set of widely used dispatching rules, suchas Shortest Processing Time (SPT) enhanced by several meta-heuristics. These simple dis-patching rules are not only quick and easy to implement, to control and to run, but alsoeasy to explain to workers. Another advantage is that these rules apply to a wide range ofscheduling problems. Major drawbacks are that they do not always produce good results, andthey are not stable when some parameters, such as the load of the simulated process, varied(Smith and Seidmann 1983; Carlier and Chrétienne 1988; Waikar et al. 1995; Hansmannand Hoeck 1997). To tackle this problem and increase the robustness of dispatching-rule-generated solutions, the optimisation unit is composed of several meta-heuristics.
Several units of PlanOrdo can be assembled to implement a wide range of hybrid meth-ods based on various models. In this paper, the performance of three hybrid models is com-pared: the first one is very fast but too weak to face heavily loaded periods; the secondone requires more computational time to give efficient results, and only applies to problemswhere it is possible to strictly rank the criteria to be optimised according to their relativeimportance; the last one is as efficient as the second one, but it does not require the opti-mised criteria to be strictly ranked. In addition, it allows the introduction of gradations andfuzziness in the criteria, thanks to an embedded multicriteria method. These hybrids are de-scribed in the following sections. All the hybrids presented here have been implemented tobe used either directly in our framework, or as standalone optimisers.
1.2 Description of the hybrid models
Our first hybrid model (Hybrid1) is composed of a set of dispatching rules and a simulationmodel. Dispatching rules compute the initial solutions to be sent to the simulation model.Provided with an initial solution, the simulation model then generates a final solution com-posed of a list of scheduled orders and a set of related performance measures (see Fig. 1).
In this hybrid model, the impact of different dispatching rules on the criteria under con-sideration (see Sect. 1.3) was investigated. Starting from simple dispatching rules, such asSPT and LPT (Longest Processing Time), these rules have been extended and combined toobtain a set of accurate experimental dispatching rules. These dispatching rules are greedyalgorithms. They work by sorting orders according to predefined sorting keys, for examplebased on the processing time of orders. The dispatching rules are used to compute initial so-lutions. In our implementation, an initial solution is a permutation of integers representing

Ann Oper Res
Fig. 1 The first hybrid model
the ranking of each shop-order to be produced by our simulation model, and by the actualplant if the proposed solution is accepted by the human planner (HP). Five representativedispatching rules have been selected from the set of available rules. They are D+F+HP,D+F+SPT, D+F+LPT, SPT+F+D and LPT+F+D, where D is the starting date, and F is thedue-date. The notation Key1+Key2+Key3 means that the dispatching rule under consid-eration sorts orders first according to Key1, then Key2 and finally Key3 (lexicographicalsorting algorithm). The D+F+HP rule is a special one, since it uses information provided bythe human planner.
This first hybrid model is really fast, easy to understand and to tune, but it is not robustenough to systematically generate good, or even satisfactory, solutions during periods ofheavy load (due to the number of orders in the shop and/or the overheads resulting frommalfunctions).
A second hybrid model (Hybrid2) was developed to improve these results. It is based ona general local iterative search method, named “hill-climber”. This iterative improvementalgorithm belongs to the widely used Stochastic Local Search methods (Hoos and Stützle2005). In order to speed up the local search, the hill-climber is based on the first improve-ment strategy as explained below. This is very easy to design and does not require hugecomputational resources. However, it can easily become trapped in a local optimum.
Basically, when applying the hill-climber to a maximisation problem, the functioning isthe following: starting from an initial solution, the hill-climber tries to move uphill thanks toan operator. This operator is applied to the current solution to generate a new one, perform-ing an elementary movement of the hill-climber in the search space. If this new solution,according to the selection function, is better than the current solution then the new solutionreplaces the current solution. The operator is applied to the new current solution in orderto generate another solution and this cycle is iterated until a predefined stopping criterionis met. The cycle is called “an iteration”. To be more precise, it performs the algorithmdisplayed in Fig. 2.
In this hill-climber, there are two main parameters: the operator and the selection func-tion. In our implementation, the operator swaps the ranks associated with two randomlyselected orders. It is responsible for moving the hill-climber from one solution to a neigh-bouring solution in the search space. Using this “simple” operator, we can focus on theselection function itself. In this hybrid, the selection function is based on a lexicographicalsort, which allows us to rank solutions according to the criteria computed by the simula-tion model. So, in the particular case of our hybridisation, the evaluation of each solutionrequires one “run” of the simulation model.
We will not go into more detail about our hybrid model because that would require a thor-ough presentation of its components, which is beyond the scope of this paper (see Duvivieret al. 2003).
Hybrid2, based on a lexicographical sort, requires to formulate the problem so that it ispossible to strictly rank the criteria to be optimised. The relative importance of these criteria,

Ann Oper Res
Fig. 2 Overview of the secondhybrid model
defined by the decision-maker, determines this ranking. However, this is neither easy norrealistic when considering underlying real-life problems. Moreover, when comparing twoscheduling strategies, a decision-maker often accepts a solution that is worse from the pointof view of the main criterion if this solution leads to significant improvements in some (orall the) other criteria. The choice of the “best” strategy taking into account several criteria isnot evident. The best way to achieve this goal is to incorporate a multicriteria method intothe hill-climber itself, which is done in our third hybrid model.
Our third hybrid (Hybrid3) is composed of a set of dispatching rules, a simulation model,and the Promethee II multicriteria method (Pomerol and Barba-Romero 2000). PrometheeII provides a complete ranking based on pairwise comparisons of solutions. This method isused to compare and rank solutions according to selected criteria. This outranking methodwas chosen due to its efficiency and to the fact that it is easy to understand and to tune bydecision-makers.
The decision-maker has to give some information on each criterion: the preference func-tion and the weight (wj ). According to the chosen preference function, uncertainty concern-ing the values of the criterion can be introduced via indifference (q) and/or preference (p)
thresholds. The preference function of a criterion Pj (a, b) allows to measure the intensityof the preference for solution a over solution b with regards to the considered criterion. Sixpossible shapes of preference function are available: usual, U-shape, V-shape, levels, linear,Gaussian.
An index of preference, which represents the strength of the decision-maker’s prefer-ence for solution a over solution b, is computed for each pair of solutions a and b as theweighted average of preferences calculated for each criterion. On the basis of these indexes,Promethee calculates positive and negative preference flows for each solution. The positiveflow expresses how much one solution is dominating the others, and the negative flow howmuch it is dominated by the others. Based on the difference between these flows, a net flow(Phi) is obtained and is used to rank the solutions.
Ann Oper Res
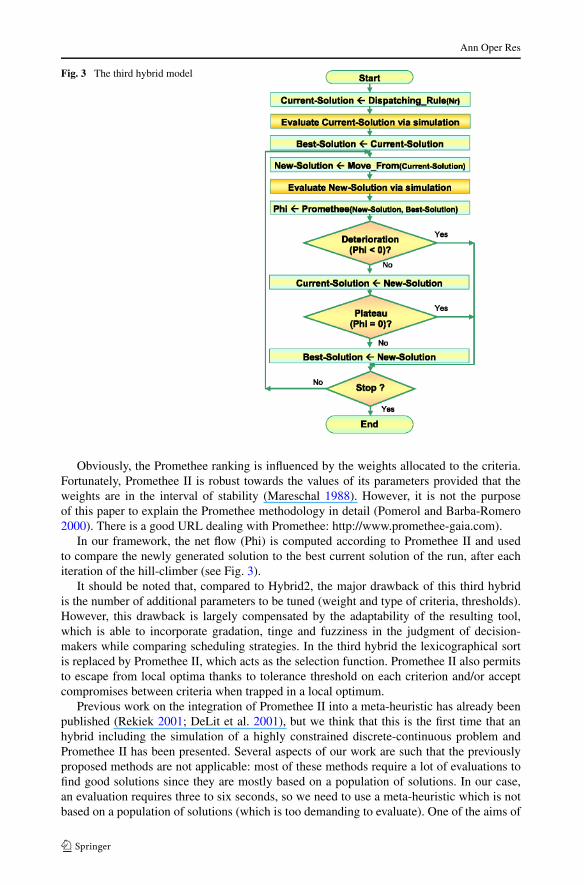
Fig. 3 The third hybrid model
Obviously, the Promethee ranking is influenced by the weights allocated to the criteria.Fortunately, Promethee II is robust towards the values of its parameters provided that theweights are in the interval of stability (Mareschal 1988). However, it is not the purposeof this paper to explain the Promethee methodology in detail (Pomerol and Barba-Romero2000). There is a good URL dealing with Promethee: http://www.promethee-gaia.com).
In our framework, the net flow (Phi) is computed according to Promethee II and usedto compare the newly generated solution to the best current solution of the run, after eachiteration of the hill-climber (see Fig. 3).
It should be noted that, compared to Hybrid2, the major drawback of this third hybridis the number of additional parameters to be tuned (weight and type of criteria, thresholds).However, this drawback is largely compensated by the adaptability of the resulting tool,which is able to incorporate gradation, tinge and fuzziness in the judgment of decision-makers while comparing scheduling strategies. In the third hybrid the lexicographical sortis replaced by Promethee II, which acts as the selection function. Promethee II also permitsto escape from local optima thanks to tolerance threshold on each criterion and/or acceptcompromises between criteria when trapped in a local optimum.
Previous work on the integration of Promethee II into a meta-heuristic has already beenpublished (Rekiek 2001; DeLit et al. 2001), but we think that this is the first time that anhybrid including the simulation of a highly constrained discrete-continuous problem andPromethee II has been presented. Several aspects of our work are such that the previouslyproposed methods are not applicable: most of these methods require a lot of evaluations tofind good solutions since they are mostly based on a population of solutions. In our case,an evaluation requires three to six seconds, so we need to use a meta-heuristic which is notbased on a population of solutions (which is too demanding to evaluate). One of the aims of

Ann Oper Res
Table 1 Notation of optimised criteria
Notation Description Criterion Description
n Number of jobs (1) NT Number of tardy jobs
dj Due date of job j (2) T = 1n
∑Tj Average tardiness
Cj Completion time of job j (3) Cmax = maxCj Completion time of jobs (makespan)
Ej = max(0, dj − Cj ) Earliness of job j (4) E = 1n
∑Ej Average earliness
the present research is to study the combination of the simulation model and the multicriteriahill-climber illustrated by Hybrid3. In the next step of our research our hybrid models willuse more efficient/sophisticated meta-heuristics such as simulated annealing, taboo searchor ant colony optimisation.
1.3 Description of the optimised criteria
At the present time, our simulation model includes four criteria. Table 1 gives our notationsand a short description of each optimised criterion (1) to (4). Criteria (2) to (4) are con-verted into hours (H). Additional criteria, such as lacks of auxiliary resources, are indirectlyoptimised while choosing amongst the set of scheduling strategies generated by PlanOrdo.
In this paper, the objectives are to minimise criteria (1) to (3), and maximise (4). Criteria(1) to (3) are classical ones, but it might seem strange to maximise the average earliness(Criterion (4)). In fact, this criterion is maximised to cope with malfunctioning aspects inorder to meet the deadlines as far as possible. These criteria have been chosen according todecision-makers of the considered plant, but PlanOrdo is not limited to them.
Having now defined the scope of our framework, we will describe the problem at Fontain-union below.
2 The industrial problem
The validation of our approach is performed on the Fontainunion plant, which is organisedas a generalised job-shop composed of seventeen machines (see Figure 4). In a job-shoporganisation, every job has its own predefined route (i.e. it is processed on machines in aspecified order which may differ from that of other jobs). In a simple job-shop, each jobhas a single route and there is exactly one machine per stage. A generalised job-shop is ajob-shop where at least one stage is composed of more than one machine and/or where atleast one product may follow more than one route. At Fontainunion, the shop comprisesseven stages (sets of machines): cleaning, stretching, stranding, stabilisation, packaging,sheathing, and packing. In the process being studied, continuous and discrete operations arelinked thanks to soldering and cutting operations in order to store semi-finished productson bobbins. Thus, stretching, stranding and stabilisation are continuous operations. Thiscontinuous part of the problem is easily modelled by simple mathematical equations. Thusit is possible to formulate the whole problem (i.e. discrete and continuous parts) using ourRAO discrete-event simulator.
Production is divided into four main families according to external diameter: simplewires, small strands, medium strands and big strands. These products are obtained fromraw wires and galvanised wires. Each product is composed of a sequence of operations that

Ann Oper Res
Fig
.4D
escr
iptio
nof
the
Font
ainu
nion
proc
ess

Ann Oper Res
must be scheduled with respect to resource and precedence constraints. The resource con-straints include input/output limitations, setups, and pre-emption (an operation cannot bestopped to start another one). The precedence constraints state that no operation can beginbefore the end of all the preceding operations. The duration of an operation depends onboth the product and the chosen machine. The production of the shop is not cyclic, demandvariations from one month to another are important.
In this make-to-order process, several kinds of setup are considered (sequence-dependent,sequence-independent and weight-proportional setups). A lot of additional constraintsmake this problem harder. These include: the use of bobbins (supporting products); maxi-mum/minimum input/output diameter and maximum input/output load; not all kinds of bob-bins are compatible with all machines; not all lines are able to make all products or performpackaging; some orders cannot be late (due to severe external transportation constraints forinstance). The simulation model must cope with ruptures of wire and other malfunctioningaspects. However, in this paper the number of breakdowns/ruptures is set to zero to simplifythe comparisons between our hybrids without adding extra noise. In this particular case, thesimulation model is deterministic and gives an upper bound of the capacities of the plant(i.e. ideal case with no breakdown). Holding costs and internal transport problems are notincluded because they have no significant impact on the process.
In addition to the hybridisation of several methods derived from different fields (mod-elling, optimisation, simulation, performance), one of the original aspects of our work is thatwe take into account auxiliary resources. In the Fontainunion process, these resources areexpressed in terms of bobbins. A scheduling strategy should avoid lack of bobbins. More-over, when looking at the flexibility of lines, the strategy should keep empty bobbins—as faras possible—to be able to cope with uneven demand. More generally, best schedules must(ideally) comprise a lot of additional specific characteristics (Duvivier et al. 2005).
Since all these characteristics have to be included, it is obvious that it will be difficultto solve the Fontainunion problem with mathematical models using exact methods, or evenwith simple meta-heuristics. So we have chosen to use simulation-based hybrids to tacklethe whole problem.
The next section presents our results by means of a concrete example dedicated to theFontainunion process.
3 Experimental results
In accordance with the confidentiality agreements for this project, no direct or detailedcomparisons between the simulations and reality are presented.
The objective of our hybrid models is to precisely schedule one month of productionat the Fontainunion plant. Our simulation takes three to six seconds to model this periodon a Pentium IV 1.5 GHz, the exact time depending on the number of orders in the periodand the kind of statistics computed during the simulation. The following paragraphs presentan example of the use of the three hybrid models implemented in PlanOrdo where 134orders are simulated in a period of one month. Each hybrid is evaluated on the four criteriadiscussed in Sect. 1.3, from the most important to the least important. The ranking is NT >
T > Cmax > E. This configuration is also used to rank scheduling strategies.Figure 5 shows the design of experiments. The experimental results are based on the
five selected dispatching rules. Each scheduling strategy is composed of a dispatching rule(DR0, . . . ,DR4)—providing an initial solution/schedule (IS0, . . . , IS4)—enhanced by an op-timisation method (HC). The results of five scheduling strategies (FS0i , . . . ,FS4i ) are com-pared to the results of dispatching rules used without optimisation (S0, . . . , S4).

Ann Oper Res
Fig. 5 Design of experiments
When optimising the solution of the j th dispatching rule (Sj ) via an hill-climber (HC),20 runs of 4000 iterations/evaluations are launched and average results are computed (overFSj i ) to take into account stochastic aspects of this hybrid. Each iteration requires one “run”of the simulation model.
3.1 Results of Hybrid1
Based on the dispatching rules defined above, the results of our first hybrid are comparedwith the real-life situation. In most cases, Hybrid1 is able to obtain results identical to,or better than, those generated by the human planner (in terms of delays, makespan . . .).However, in busy periods (due to the number of orders in the shop and/or overheads resultingfrom malfunctions) this first hybrid is not robust enough to systematically generate good, oreven satisfactory, solutions.
Each strategy, identified by a number “s” and by the name of the associated dispatchingrule, provides one solution in the Hybrid1. Table 2 compares them for the selected period.The best one, according to the four predefined criteria, is highlighted. The last row (denotedby “All”) gives the average values.
For the selected period and configuration, the best dispatching rule is D+F+HP. Thisshows that the best strategy consists of respecting starting dates computed by the humanplanner. However, it should be pointed out that this ranking cannot necessarily be generalisedto another period due to the influence of the parameters on the performance of dispatchingrules (as mentioned in Sect. 1).
3.2 Results of Hybrid2
In order to improve these results a second hybrid was implemented. It includes a non-deterministic hill-climber. The results obtained after 4000 iterations are summarised inTable 3. Starting from each dispatching rule, 20 runs of 4000 iterations/evaluations werelaunched and average results were computed to take into account stochastic aspects of this

Ann Oper Res
Table 2 Hybrid1, comparison of several dispatching rules
Table 3 Results of Hybrid2 after 4000 iterations
hybrid. For each strategy, this table gives its identification number as well as the averagevalue and standard deviation of each optimised criterion. For a given criterion, the “averagegain” is the absolute difference between its initial value (obtained via the related dispatchingrule) and its average final value (measured on final solutions). The sign is positive wheneveran improvement is obtained. The best strategy, according to the four predefined criteria,is highlighted. The bottom row (denoted by “All”) gives the average values and standarddeviations for all the strategies together. In this hybrid a lexicographical sort is applied todetermine the best strategy.
Our second hybrid obtains better results than dispatching rules on all criteria. A majordrawback of this hybrid is that each run requires from three to six hours on a Pentium IV1.5 GHz-based PC (according to the number of orders in the selected period and the kind ofstatistics computed during the simulation). However, Table 3 shows two important results:first, that, at the end of each run, there are no late orders (columns NT and T are filledwith zeros); and second, that Hybrid2 reduces the makespan (Cmax) by an average of at leasteight hours. This latter result means that a minimum of eight hours is gained in the workingtime of a team of eleven workers during the simulated month. Similar results were obtainedwhen running Hybrid2 over other time-periods. The exception was for very heavily loadedperiods. In this case, the results obtained by Hybrid2 are close to those obtained by thehuman planner, but still (much) better than Hybrid1.

Ann Oper Res
3.3 Results of Hybrid3
When a lexicographical sort is used a small gain on a criterion may induce significant losseson other less weighted criteria. In real-life problems, when comparing two scheduling strate-gies, a decision-maker often accepts a solution that is slightly worse from the point of viewof the main criterion if this solution leads to significant improvements in some (or all the)other criteria. This problem results from the impossibility to introduce the concept of grada-tions and fuzziness in each criterion. Similarly, the simulator computes the schedules with agreat accuracy whereas process times can vary by a significant factor when considering theproduction process (mainly due to workers’ interactions). Consequently, it is more realisticto add a threshold on the criteria that are expressed in hours.
In order to improve our Hybrid2 so that it is possible to introduce equally ranked criteriaand/or gradation, Hybrid3 embeds the Promethee II multicriteria method. This method al-lows to introduce indifference (q) and/or preference (p) thresholds for each criterion. In thisresearch, three sets of parameters have been tested according to the decision-makers. Table 4summarises the used parameters and the obtained results. In the sets of parameters relatedto Hybrid3.1 and Hybrid3.2 the criterion NT is considered to be a “usual” one whereas inHybrid3.3 it is defined as a linear criterion. For Hybrid3.1, the other criteria are V-shape typewhereas they are linear in the two other hybrids. The values of the parameters are detailedin Table 4.
For instance, considering Hybrid3.2, if two solutions differ of at least four hours (p = 4)
on the makespan (Cmax) one solution will be preferred over the other on the basis of this cri-terion. On the other hand, if the difference is less than an half hour (q = 0.5) this differenceis not significant and the two solutions are considered as equivalent for this criterion.
Hybrid3.1 is used to demonstrate (experimentally) that our multicriteria hill-climber isable to provide similar solutions to those generated by Hybrid2 without the inherent re-strictions of the lexicographical sort, which needs to strictly rank the criteria. Hybrid3.2and Hybrid3.3 illustrate the possibility of softly adjusting the relative importance of criteriaaccording to the decision-makers’ judgement.
Table 4 shows that there is no dominant strategy for the considered sets of parameters.So, in order to determine the “best” strategy (highlighted in Table 4) for the three sets ofparameters, two methods have been used: a lexicographical sort and the Promethee II multi-criteria method. Similar results have been obtained excepted for Hybrid3.3. For this hybridthe “best” solution according to the lexicographical sort is the strategy 4 whereas using thePromethee II multicriteria method the best compromise corresponds to the strategy 1.
This shows that the multicriteria method allows to depreciate the Cmax criterion (of0.91 H) while improving the E criterion (of 6.09 H). This perfectly matches a situationwhere, while comparing two scheduling strategies, a decision-maker accepts a solution thatis worse than another one on one of the criteria if this solution leads to significant improve-ments in some (or all) of the other criteria. Moreover a sensitivity analysis shows us thatthese results are robust when the weights vary.
The average results from the various hybrids are compared. These results show that Hy-brid2 and Hybrid3 clearly outperform Hybrid1, which is (only) used when fast results areneeded. Moreover, the average results from Hybrid3 (based on a multicriteria hill-climber)are similar to those generated by Hybrid2 (based on a lexicographical sort) according to theconfiguration NT > T > Cmax > E. Table 4 shows that Hybrid3.1 provides us with simi-lar solutions to those generated by Hybrid2 so that it is possible to parameterise Hybrid3so that its internal multicriteria objective function matches the lexicographical sort of Hy-brid2. In this particular case Hybrid3 obtains exactly same results as Hybrid2, provided that

Ann Oper Res
Tabl
e4
Res
ults
ofH
ybri
d3af
ter
4000
itera
tions

Ann Oper Res
the pseudo-random number generators of both hybrids are initialised with the same seed.These results are not presented to reduce the size of this section (we have used the resultsof Hybrid3.1 as the closest one to Hybrid2, even though Hybrid3.1 tends to favour E to thedetriment of Cmax). In a similar way it is possible to parameterise Hybrid3 to favour solu-tions with at most (or exactly) one late order. The parameters must reflect the schedulingstrategies applied by the human planner to the underlying industrial problem. So the setsof parameters related to Hybrid3.1 to Hybrid3.3 have been chosen as a good compromisebetween the possibilities of Hybrid3 and the possibilities of the underlying process.
At this point, two main results may be highlighted: firstly Hybrid3 performs (at least)as well as Hybrid2 which experimentally demonstrates the efficiency of our multicriteriahill-climber; secondly, thanks to the embedded multicriteria method, Hybrid3 is able toincorporate gradation in the judgment of decision-makers (illustrated by the three sets ofparameters associated with Hybrid3) which experimentally demonstrates the versatility ofour multicriteria hill-climber.
In order to pursue our comparisons, we can compare average values/tendencies relatedto the strategies given by Table 4 (paying close attention to the standard deviations). Theseresults show that there is a tendency for the average gains on all the criteria to fall as wemove from Hybrid3.1 to Hybrid3.3. However there is a problem with this conclusion. Directcomparison of average values of a given criterion between hybrids is only possible if thestandard deviations of the solutions are quite similar. Unfortunately, this is not the case here(see Table 4).
One way to overcome this difficulty is to use additional statistical methods to characterisethese dispersions. Another one is to compare the set of best solutions using a lexicographicalsorting algorithm. This might lead to another pitfall, due to the stochastic aspects of ourhybrid models: in the context of the assessment of the usability of stochastic algorithms, itis quite useless to give the best solution ever found if we do not know how often it is found.
4 Conclusions and perspectives
In this paper we have presented a multicriteria optimisation-and-simulation approach to areal-life industrial scheduling problem, pointing out the importance of the criteria embeddedin the objective function. In the study, the use of a multicriteria method is motivated by theunderlying real-life problem. Thus, when comparing two scheduling strategies, a decision-maker often accepts a solution that is worse than another one on one of the criteria if thissolution leads to significant improvements in some (or all) of the other criteria.
In this paper we have applied a set of very simple heuristics (dispatching rules) enhancedby a multicriteria hill-climber to optimise the scheduling part of a real-life problem. The re-sults obtained are similar to or better than those generated by the human planner, even whenconsidering heavily loaded periods. The results are consistent with and show the robustnessof the generic multicriteria optimisation-and-simulation model that was developed. As wellas the automation of the tedious scheduling task, our framework provides decision-makerswith a set of solutions, resulting from a panel of scheduling strategies. In this paper, we havealso experimentally demonstrated the efficiency and the versatility of the hybrid modelspresented. Thus the proposed approach is not restricted to the Fontainunion problem.
It appears that the particular context of time-limited decision-making, which implies thatimplemented methods must be ran in a small amount of time, that is a limited number ofevaluations, leads to the fact that “more efficient meta-heuristics” embedding diversifica-tion mechanisms does not have enough time to converge towards good solutions. So we

Ann Oper Res
have chosen to implement fast meta-heuristics with no diversification mechanism (i.e. hill-climbers), hybridized with dispatching rules which are chosen so as to start hill-climbersfrom good sparse solutions in the search space.
We have studied the behaviour of our hybrids over several periods; the results remainconsistent with those generated by the human planner (in terms of delays and makespan).Which of the three hybrids is most likely to be selected by decision-makers will depend onthe required and/or expected gain over several optimised criteria and the amount of timeavailable to optimise initial solutions:
– Hybrid1 is able to generate a panel of solutions (resulting from simple dispatching rules)in a few seconds without an optimisation stage;
– Hybrid2 is able to improve the solutions given by Hybrid1 in three to six hours (dependingon various parameters such as the accuracy required on the optimised criteria) with veryfew parameters to tune, provided that it is possible to rank, using a total order, the criteriato be optimised according to their relative importance;
– Hybrid3 is as efficient as, and much more versatile than, Hybrid2 thanks to the PrometheeII multicriteria method, but it needs several additional parameters to be tuned to capturethe gradations and fuzziness in the judgment of decision-makers.
However, the results obtained lead us to promote our hybrids on the grounds of the aver-age number of evaluations required to generate best solutions, as well as on the grounds ofthe quality of the solutions. We have also implemented several variants of our hill-climberincluding more efficient meta-heuristics (such as taboo search). As explained in the intro-duction to this paper, we have focused on another aspect of our study, the introduction ofmulticriteria aspects into our schedule builder. In this context, it is preferable to considera simple hill-climber (with fewer parameters to tune) before generalising this approach tomore efficient meta-heuristics. In order to be able to assess the effect of the hybridisationof our hill-climber with the Promethee II multicriteria method without multiplying the pa-rameters, we have chosen a very simple algorithm: a non-deterministic hill-climber. How-ever, when considering efficiency aspects it is clear that this simple hill-climber must bereplaced by more efficient meta-heuristics. The next step of our study will use more effi-cient meta-heuristics such as simulated annealing or taboo search. These meta-heuristicsare not based on populations of solutions, but they do require additional parameters to betuned. Finally, the use of population-based meta-heuristics such as genetic algorithm or antcolonies depends on the duration of our simulation model: in fact, the application of thesemeta-heuristics is conditional on the reduction of their computational time, since they tradi-tionally require many more evaluations of solutions (i.e. simulations) to obtain same qualityof solutions as our hill-climber, according to the pre-defined criteria.
We are currently working on the acceleration of our simulation model as well as the im-plementation of new dispatching rules, to improve our hybrids and diversify our schedulingstrategies.
The next version of PlanOrdo will be completed soon and will include a powerful mul-ticriteria performance unit. Its aim is to synthesise pertinent measures into scorecards. Thisversion will include financial criteria as well as other aspects (such as maintenance optimisa-tion (Jamali et al. 2004)). This unit will also include several tools to guide decision-makerswhen they are tuning our multicriteria hybrids. For example, it will be possible to perform asensitivity analysis on the results to compute the weight intervals stability. By extension, itwill be possible to obtain information about the robustness of the proposed solutions.
This performance unit will transform our framework into an effective multicriteriacomputer-aided decision tool.

Ann Oper Res
Acknowledgements This work is part of three projects subsidised by the Walloon Region of Belgium andthe European Social Fund. The authors would like to thank the staff at Fontainunion who contributed to thiswork.
References
Artiba, A., Emelyanov, V. V., & Iassinovski, S. I. (1998). Introduction to intelligent simulation: the RAOlanguage. Boston: Kluwer Academic.
Carlier, J., & Chrétienne, P. (1988). Problèmes d’ordonnancement, modélisation, complexité, algorithmes.Paris: Masson.
De Lit, P., Latinne, P., Rekiek, B., & Delchambre, A. (2001). An ordering genetic algorithm for assemblyplanning. International Journal of Production Research, 39(16), 3623–3640.
Duvivier, D., Dhaevers, V., Bachelet, B., & Artiba, A. (2003). Integrating simulation and optimization of man-ufacturing systems. IEEE—Systems, Man, and Cybernetics, Part C: Applications and Reviews, 33(2),186–192.
Duvivier, D., Dhaevers, V., & Artiba, A. (2005). Simulation based performance measurement and analysis: anindustrial application. International Journal of Computer Integrated Manufacturing, 18(5), 402–407.
Hansmann, K.-W., & Hoeck, M. (1997). Production control of a flexible manufacturing system in a job shopenvironment. International Transactions in Operational Research, 4(5/6), 341–351.
Hoos, H. H., & Stützle, T. (2005). Stochastic local search—foundations and applications. San Mateo: MorganKaufmann.
Iassinovski, S., Artiba, A., Bachelet, V., & Riane, F. (2003). Integration of simulation and optimization forsolving complex decision making problems. International Journal of Production Economics, 85(1), 3–10.
Jain, A., & Meeran, S. (1999). Deterministic job-shop scheduling: past, present and future. European Journalof Operational Research, 113, 390–434.
Jamali, M. A., Roux, O., Ait-Kadi, D., & Artiba, A. (2004). An integrated approach using optimizationmethods and simulation in maintenance strategies analysis. In proc. of 14th international institution forproduction engineering research, CIRP Design Seminar, Cairo, Egypt.
Mareschal, B. (1988). Weight stability intervals in multicriteria decision aid. European Journal of Opera-tional Research, 33, 54–64.
Pinedo, M. (1995). Scheduling—theory, algorithms, and systems. New York: Prentice-Hall.Pinedo, M., & Chao, X. (1999). Operations scheduling with applications in manufacturing and services. New
York: Irwin/McGraw-Hill.Pomerol, J.-C., & Barba-Romero, S. (2000). Multicriterion decision making in management: principles and
practice. New York: Kluwer.Rayward-Smith, V. J., Osman, I. H., Reeves, C. R., & Smith, G. D. (1996). Modern heuristic search methods.
New York: Wiley.Rekiek, B. (2001). Assembly line design multiple objective grouping genetic algorithm and the balancing of
mixed-model hybrid assembly line. PhD thesis, Université Libre de Bruxelles, Bruxelles, Belgium.Smith, M. L., & Seidmann, A. (1983). Due date selection procedures for job-shop simulation. Computers and
Industrial Engineering Journal, 7(3), 199–207.Waikar, A. M., Sarker, B. R., & Lal, A. M. (1995). A comparative study of some priority dispatching rules
under different shop loads. Production Planning Control, 6(4), 301–310.
Copyright © 2022 FDOKUMEN




















