
Mobile sensor networks for modelling environmental pollutant distribution
16
This article was downloaded by: [University of Essex], [Bowen Lu] On: 08 July 2011, At: 05:06 Publisher: Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK International Journal of Systems Science Publication details, including instructions for authors and subscription information: http:/ / www.tandfonline.com/ loi/ tsys20 Mobile sensor networks for modelling environmental pollutant distribution Bowen Lu a , John Oyekan a , Dongbing Gu a , Huosheng Hu a & Hossein Farid Ghassem Nia a a School of Computer Science and Electronic Engineering, University of Essex, Wivenhoe Park, Colchester, UK Available online: 1 January 2011 To cite this article: Bowen Lu, John Oyekan, Dongbing Gu, Huosheng Hu & Hossein Farid Ghassem Nia (2011): Mobile sensor networks for modelling environmental pollutant distribution, International Journal of Systems Science, DOI:10.1080/ 00207721.2011.572198 To link to this article: ht t p:/ / dx.doi.org/ 10.1080/ 00207721.2011.572198 PLEASE SCROLL DOWN FOR ARTICLE Full terms and conditions of use: http://www.tandfonline.com/page/terms-and-conditions This article may be used for research, teaching and private study purposes. Any substantial or systematic reproduction, re-distribution, re-selling, loan, sub-licensing, systematic supply or distribution in any form to anyone is expressly forbidden. The publisher does not give any warranty express or implied or make any representation that the contents will be complete or accurate or up to date. The accuracy of any instructions, formulae and drug doses should be independently verified with primary sources. The publisher shall not be liable for any loss, actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directly or indirectly in connection with or arising out of the use of this material.
Transcript of Mobile sensor networks for modelling environmental pollutant distribution

This art icle was downloaded by: [ University of Essex] , [ Bowen Lu]On: 08 July 2011, At : 05: 06Publisher: Taylor & FrancisI nforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mort imer House,37-41 Mort imer St reet , London W1T 3JH, UK
International Journal of Systems SciencePublicat ion det ails, including inst ruct ions for aut hors and subscript ion informat ion:ht t p: / / www. t andfonl ine.com/ loi/ t sys20
Mobile sensor networks for modelling environmentalpollutant distributionBowen Lu a , John Oyekan a , Dongbing Gu a , Huosheng Hu a & Hossein Farid Ghassem Nia a
a School of Comput er Science and Elect ronic Engineering, Universit y of Essex, WivenhoePark, Colchest er, UK
Available onl ine: 1 January 2011
To cite this article: Bowen Lu, John Oyekan, Dongbing Gu, Huosheng Hu & Hossein Farid Ghassem Nia (2011): Mobilesensor net works for model l ing environment al pol lut ant dist ribut ion, Int ernat ional Journal of Syst ems Science,DOI:10.1080/ 00207721.2011.572198
To link to this article: ht t p: / / dx.doi.org/ 10.1080/ 00207721.2011.572198
PLEASE SCROLL DOWN FOR ARTI CLE
Full terms and condit ions of use: ht tp: / / www.tandfonline.com/ page/ terms-and-condit ions
This art icle may be used for research, teaching and private study purposes. Any substant ial or systemat icreproduct ion, re-dist r ibut ion, re-selling, loan, sub- licensing, systemat ic supply or dist r ibut ion in any form toanyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representat ion that the contentswill be complete or accurate or up to date. The accuracy of any inst ruct ions, form ulae and drug doses shouldbe independent ly verified with pr imary sources. The publisher shall not be liable for any loss, act ions, claims,proceedings, demand or costs or damages whatsoever or howsoever caused arising direct ly or indirect ly inconnect ion with or ar ising out of the use of this m aterial.

International Journal of Systems Science
2011, 1–15, iFirst
Mobile sensor networks for modelling environmental pollutant distribution
Bowen Lu*, John Oyekan, Dongbing Gu, Huosheng Hu and Hossein Farid Ghassem Nia
School of Computer Science and Electronic Engineering, University of Essex, Wivenhoe Park, Colchester, UK
(Received 2 September 2010; final version received 23 February 2011)
This article proposes to deploy a group of mobile sensor agents to cover a polluted region so that they are able toretrieve the pollutant distribution. The deployed mobile sensor agents are capable of making point observation inthe natural environment. There are two approaches to modelling the pollutant distribution proposed in thisarticle. One is a model-based approach where the sensor agents sample environmental pollutant, build up anenvironmental pollutant model and move towards the region where high density pollutant exists. The modellingtechnique used is a distributed support vector regression and the motion control technique used is a distributedlocational optimising algorithm (centroidal Voronoi tessellation). The other is a model-free approach where thesensor agents sample environmental pollutant and directly move towards the region where high density pollutantexists without building up a model. The motion control technique used is a bacteria chemotaxis behaviour.By combining this behaviour with a flocking behaviour, it is possible to form a spatial distribution matched to theunderlying pollutant distribution. Both approaches are simulated and tested with a group of real robots.
Keywords: mobile sensor network; model-based; model-free; pollutant monitoring
1. Introduction
Environmental pollutant distribution is a spatial
phenomenon. Modelling spatial phenomena requires
a distributed sensing capability of wireless mobile
sensor networks. There has been a number of research
projects in climatology, forestry and oceanography for
modelling environmental spatial phenomena (Merino,
Caballero, de Dios, and Ferruz 2006; Corrigan,
Roberts, Ramana, Kim, and Ramanathan 2007;
Leonard et al. 2007). The distribution nature of
mobile sensor agents in the natural environment
could be used to monitor pollutants more efficiently
and reliably, and could also be used to form a visual
representation of the pollutant. The importance of
forming a visual representation of the pollutant
becomes more obvious if the pollutant is invisible
and hazardous to human health. Such visual informa-
tion could enable emergency services strategically
evacuate populated areas in the event of a leak
especially if resources are scarce.
Recently, learning an environmental spatial func-
tion and optimising coverage control simultaneously
has attracted many researchers’ attention. Different
combinations between learning algorithms and cover-
age control algorithms have been researched. Lloyd’s
algorithm for optimising centroidal Voronoi tessella-
tion (CVT ) has been used as a locational optimising
algorithm in Cortes, Martinez, Karatas, and Bullo
(2004) and Pimenta, Kumar, Mesquita, and Pereira
(2008), where the environmental spatial function is
established as a prior knowledge. Using Lloyd’s
algorithm for coverage control with a radial basis
function (RBF ) neural network learning an environ-
mental spatial function has been implemented in
Schwager, Rus, and Slotine (2009). A consensus
algorithm is required to maintain the distributed
implementation.
With RBF neural networks, flocking algorithm is
another choice for coverage control, as has been
implemented in Lynch, Schwartz, Yang, and
Freeman (2008). Besides RBF neural networks, the
environmental spatio-temporal function can be learnt
by using a Kriging Kalman filter with a CVT coverage
control in Cortes (2009) and with a flocking coverage
control algorithm in Choi, Lee, and Oh (2008). A
Kalman filter and a weighting interpolation method
have been used to learn an environmental spatial
function in Martinez (2010). All these are model-based
approaches where a model needs to be built up first
based on sampled observations and then mobile agents
make their decisions to move based on the model. At
the early stage of the process, the model is not perfect
due to lack of information. Gradually, the perfor-
mance can be improved when mobile sensor agents
move closer to the source and the model is more
accurate.
*Corresponding author. Email: [email protected]
ISSN 0020–7721 print/ISSN 1464–5319 online
� 2011 Taylor & Francis
DOI: 10.1080/00207721.2011.572198
http://www.informaworld.com
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

There has also been an interest in the use of
model-free approaches to provide coverage control to
an environmental spatio-temporal function as in
Mesquita, Hespanha, and Astrom (2008) and
Oyekan, Hu, and Gu (2010). This involves the use of
a source seeking controller in combination with a
flocking controller. The source seeking controller is
used to drive the mobile agents towards the source of
environmental spatio-temporal function in the envir-
onment without the need to rely on models. As a result,
inaccuracies in controlling the agents in the early stage
of process are avoided. Many researchers have
investigated the use of bacteria chemotaxis behaviours
as a source seeking controller. The bacteria chemotaxis
behaviour is a stochastic optimisation approach to
seeking to find the extremum of a function. Dhariwal,
Sukhatme, and Requicha (2004) has used a bacteria
chemotaxis behaviour as a basis for developing the
controller. Marques, Nunes, and Almeida (2002) have
investigated the use of a silkworm moth algorithm and
a direct gradient following method on a robot.
Other approaches of source seeking behaviours
include Baronov and Baillieul’s work in Baronov and
Baillieul (2008) where a reactive controller can
navigate a single, sensor-enabled vehicle to ascend or
descend a scalar potential field. Mayhew, Sanfelice,
and Teel (2008) have used a hybrid controller that
combines a line minimisation-based algorithm and a
vehicle path planning algorithm to find the
extremum of a function. Their approach does not
need the agent’s position information or any knowl-
edge of the function to be mapped a prior. Lilienthal
and Duckett (2003) have used a Braitenberg vehicle
approach to find an ethanol source in their own
experiments.
In this article, we investigate the use of a
model-based approach and a model-free approach
and propose two novel algorithms for modelling
environmental pollutants using mobile sensor net-
works. The first one we used (SVR-CVT ) is based on
a distributed support vector regression (SVR) com-
bined with a CVT algorithm, which is a model-based
approach. Focusing on an instance of environmental
pollutant samples, our proposed SVR-CVT algorithm
can cover as much as the most polluted area and
produce an estimated pollutant spatial model. SVR is a
method for solving the function regression problem
(Smola and Scholkopf 2004). This method is able to
find a global minimum as it can be formulated in a
constrained quadratic optimisation problem. The
research of using kernel methods for function regres-
sion over sensor networks has been already conducted
in Predd, Kulkarni, and Poor (2006).
With the property of additive structure, the
minimisation problem has been solved using an
incremental sub-gradient method in Rabbat and
Nowak (2006). The incremental sub-gradient method
is proposed working in a sequential way with the need
of constructing a message passing path. Constructing a
message passing path is not scalable and robust in
wireless sensor networks. In our proposed SVR-CVT
algorithm, a distributed or parallel version is devel-
oped, which can directly be applied for wireless sensor
networks without the need for constructing a message
passing path. Our distributed algorithm is built on a
finite support kernel function in SVR. It only requires
local communication capability of wireless sensor
networks between neighbour sensor agents. In contrast
to the consensus algorithm used in RBF neural
networks, which requires multiple information
exchanges to achieve the consensus on interested
values among the neighbours at each time step, this
local algorithm requires one information exchange at
each time step and thus less intensive local commu-
nication. With the established model, the CVT algo-
rithm is able to control mobile sensor agents to move.
The second one we used (BCT-FLK ) is based on a
bacteria chemotaxis behaviour (BCT ) combined with
a flocking algorithm, which is a model-free approach.
Bacterial chemotaxis behaviour can make agents
swarm with a certain nutrition distribution, as in
Mesquita et al. (2008), that is consistent with the
environmental pollutant distribution so that even if the
pollutant distribution is invisible to the human eye, it is
possible to be observed by visible agent distribution.
The Berg and Brown model was chosen over other
complex models such as Yi, Huang, Simon, and Doyle
(2000) because of its ease of analysis and its ability to
find the source of a pollutant using a random walk
method. In addition, the parameters of this behaviour
model offers the user of the system a potential ability
to control mobile sensor agents to balance the
exploration and exploitation behaviours in order to
avoid local minima (Oyekan and Hu 2010) without the
need to model the environmental pollutant distribu-
tion. The mobile sensor agents obtain concentration
readings of the environmental spatio-temporal func-
tion such as pollution on the spot and use the readings
to calculate the gradient of the function. Also a
flocking behaviour is integrated with the bacteria
chemotaxis behaviour to keep the mobile sensor
agents moving as a group without collision.
Both approaches are simulated with multiple
mobile sensor agents. A testing platform has been set
up in our lab where six networked robots (wifibots) are
used to test two approaches. Due to the lack of real
pollutant data and realistic pollutant models, several
smooth mathematical functions are used as the
pollutant distribution in simulations and even in real
tests. In the following sections, Section 2 presents
2 B. Lu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

SVR-CVT algorithm and Section 3 presents BCT-FLK
algorithm. The simulation results are given in
Section 4. The experimental results are provided in
Section 5. Finally, our conclusion and future work are
given in Section 6.
2. The model-based approach
2.1. Distributed SVR
In an SVR algorithm, the problem is defined as
follows. Q�R2 is a 2D convex environment for a
sensor network with N agents. An arbitrary point in it
is denoted by q. The ith agent’s position in Q is denoted
by qi¼ [xi, yi]T, and zi denotes a sensory observation of
ith agent (i¼ 1, . . . ,N ). The sample set of sensory
observation is defined as S ¼ ðqiT, ziÞ
Ni¼1. Finding a
function f (q)¼wT�(q)þ b, which can give a regression
result to the sample set S with a limited error ", is the
goal of "-SVR (Vapnik 1999). �(q) is a feature space
function, which maps q from R2 to a higher-dimen-
sional space. b is a biased constant. Weight parameter
w can be found by solving the following constrained
convex optimising problem (Smola and Scholkopf
2004):
minw,�i,�
�i
1
2wTwþ C
�
X
N
i¼1
�i þX
N
i¼1
��i
�
( )
ð1Þ
subject to
zi � hw,�ðqiÞi � b � "þ �i
hw,�ðqiÞi þ b� zi � "þ ��i
�i, ��i � 0
8
>
<
>
:
where h�, �i denotes inner products. �i and ��i are slack
variables, and constant C4 0 is a scaler of slack
variables. These three parameters determine the trade-
off between the flatness of regression function f and the
error " tolerance. For solving this problem with the
inequality constraints, a dual optimisation problem
should be solved (Smola and Scholkopf 2004):
min�i,�
�i
J ¼1
2
X
N
i,j¼1
ð�i � ��i Þð�j � ��j ÞKðqi, qj Þ
þ "X
N
i¼1
ð�i þ ��i Þ �X
N
i¼1
zið�i � ��i Þ ð2Þ
subject to
X
N
i¼1
ð�i � ��i Þ ¼ 0
0 � �i,��i � C
8
>
<
>
:
where �i and ��i are non-negative Lagrange multipliers,
and weight parameter w can be obtained from the
equation below:
w ¼X
N
i¼1
ð�i � ��i Þ�ðqiÞ ð3Þ
With the above equations, the regression function
f (q)¼wT�(q)þ b can be reformulated as below:
f ðqÞ ¼X
N
i¼1
ð�i � ��i Þh�ðqiÞ,�ðqÞi þ b ð4Þ
In (4), h�(qi),�(q)i can be replaced with a kernel
function by using the kernel trick. A kernel function
K(qi, qj) for SVR needs to satisfy Mercer’s conditions:
(1) K(qi, qj) is continuous;
(2) K(qi, qj) is symmetrical K(qi, qj)¼K(qj, qi);
(3) K(qi, qj) is semi-positive definite.
Choosing a kernel function for SVR depends on the
underlying spatial property and the prior knowledge
about the underlying function. The following
modified cosine function (5) is selected for our SVR
algorithm.
Kðqi,qj Þ ¼
1
21þ cos
�kqi�qj k
B
� �� �
, kqi�qj k2 ½0,B�
0, otherwise
8
<
:
ð5Þ
This function has a finite support with radius equal to
B, and B’s value is related to the wireless communica-
tion range of each agent. In our simulations and
experiments, this kernel function provides a good
performance. With the selected kernel function, the
regression function is converted as below:
f ðqÞ ¼X
N
i¼1
ð�i � ��i ÞKðqi, qÞ þ b ð6Þ
A sequential method for solving �, ��i and b has been
given by Vijayakumar and Wu (1999). It is an
incremental sub-gradient algorithm. Basically the
gradient of each sample data, constrained by
the constraints on the parameters, is used to update
the parameters. It can be converted into a distributed
or parallel algorithm using the finite support kernel
function. The distributed algorithm maintains a
regression function f (q) in each node i.
f ðqÞ ¼X
j2Ni[i
ð�i � ��i ÞKðqj, qÞ þ b ð7Þ
International Journal of Systems Science 3
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

where Ni is the set of neighbour sensor agents of i. Our
distributed SVR learning algorithm is showed as in
Algorithm 1.
Algorithm 1: Distributed SVR algorithm
Initialise �i ¼ 0, ��i ¼ 0, t ¼ 0
Loops until the terminal condition is met:
Each sensor node obtains the distance kqi� qjk
from its neighbour set Ni
Each sensor node calculates the kernel function
K(qi, qj)
Ei ¼ zi �P
j2Ni[ið�i � ��i Þ½Kðqi, qj Þ þ �2�
��i¼min{max[�(Ei� "), ��i],C� �i}
���i ¼ minfmax½�ð�Ei � "Þ,���i �,C� ��i g
Update �i¼ �iþ ��iUpdate ��i ¼ ��i þ ���it tþ 1
end
2.2. Distributed CVT
In a CVT algorithm, the location is optimised based
on a Voronoi graph. A sensor agent position qi in a
convex space Q is termed as a generating point. An
arbitrary point in Q is denoted by q. The ith sensor’s
Voronoi cell Vi is defined as below:
Vi ¼ q 2 Qj q� qi�
�
�
� � q� qj�
�
�
�, 8i 6¼ j
ð8Þ
CVT is a special Voronoi tessellation, in which each
generating point moves forward to the mass centre of
each Voronoi cell. In our research, the mass is related
with pollutant distribution. The optimisation algo-
rithm of CVT is able to move the sensor agents
towards the high concentration region while still
located inside one of the Voronoi cells. Finally, all
the sensor agents are distributed in the monitoring
environment according to the pollutant distribution.
To develop a distributed CVT, the limited wireless
communication range of each agent is utilised to
redefine a range-limited Voronoi region Wi (Cortes
and Bullo 2005):
Wi ¼ fq 2 Qj�i \ Vig
where �i¼ {q2Qjkqi� qk�B} is a circle region of
radius B for agent i. The cost function of locational
optimisation problem is defined as Schwager et al.
(2009):
Hð p1, . . . , pnÞ ¼X
n
i¼1
Z
Wi
1
2q� pi
�
�
�
�
2f ðqÞdq ð9Þ
The following definitions are used:
MWi¼
Z
Wi
f ðqÞdq
LWi¼
Z
Wi
qf ðqÞdq
CWi¼
LWi
MWi
where MWi, LWi
and CWidenote the mass, first
moment and mass centre of the ith range-limited
Voronoi cell. The gradient of the cost function is used
as the controller for mobile sensor agents:
ui ¼ �@H
@qi
¼ MWiðCWi
� qiÞ ð10Þ
where ui is ith agent’s speed input and is a step length
of agent motion. The distributed CVT algorithm is
given in Algorithm 2:
Algorithm 2: Distributed CVT algorithm
Initialise MWi¼ 0,LWi
¼ 0
Agent qi is randomly located at a certain region
Loops until the terminal condition is met:
Sample environmental variable ziExecute the distributed SVR algorithm
Obtain the updated f (q) from SVR
MWi¼
R
Wif ðqÞdq
LWi¼
R
Wiqf ðqÞdq
Calculate the new mass centre CWi¼ LWi
=MWi
Move qi towards CWiwith a certain speed
end
3. The model-free approach
3.1. BCT behaviour
Based on the Berg and Brown model (Brown and Berg
1974), a bacterium motion is composed of a combina-
tion of tumble and run phases. The frequency of these
phases depends on the measured concentration gradi-
ent in the surrounding environment. The run phase is
generally a straight line while the tumble phase is a
random change in direction with a mean of about 68
in the E. Coli bacterium. If the bacterium is moving up
a favourable gradient, it tumbles less thereby increas-
ing the length of the run phase and vice versa if going
down an unfavourable gradient. This behaviour was
formulated by Berg and Brown by fitting the results
of their experimental observations with a best
4 B. Lu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

fit equation:
¼ 0 exp �d �Pb
dt
� �
d �Pb
dt¼
1
m
Z t
�1
dPb
dexp
� t
m
� �
d
dPb
dt¼
kD
ðkD þ C Þ2dz
dt
ð11Þ
where is the mean run time and 0 is the mean run
time in the absence of concentration gradients. � is a
constant of the system based on the chemotaxis
sensitivity factor of the bacteria. Pb is the fraction of
the chemical receptor bound at concentration z. z is the
present concentration reading taken by the sensor
agent. kD is the dissociation constant of the bacterial
chemoreceptor. d�Pb
dtis the weighted rate of change of Pb.
m is the time constant of the bacterial system.
The above equations determine the time between
tumbles and hence the length of runs between tumbles.
During the tumble phase, the agent can randomly
choose a range of angles in the set � 2 {0, . . . , 360}. The
range of the angle makes it possible for the mobile
sensor agents to backtrack if there is a favourable
gradient behind them. From above, it can
be summarised that the higher the pollutant level, the
smaller the length of runs between tumbles and the
smaller the pollutant level, the higher the length
of runs.
During the run phase, the speed function of BCT
behaviour is based upon the ideal gas law and the
Graham’s gas law of diffusion. The ideal gas law states
that by increasing the temperature of a gas system, a
larger volume is occupied by the gas. The Graham’s
gas law of diffusion states that the rate of diffusion of a
gas is inversely proportional to its density. Following
these laws, a speed function ubi of BCT behaviour as
below results:
ubi ¼u0T
zi
where u0 is the standard speed without any reading.
By using the BCT behaviour, each agent can be
viewed as a randomly vibrating gas molecule with bias
towards the source of the pollutant. By increasing T,
each agent vibrates more so that the distance covered
by each of the bacteria is increased per unit time and
the sensor agents spread more across the area of the
pollutant. As zi increases, the speed ubi of the bacteria
reduces making it dwell in areas of ‘rich food’ source.
A higher pollutant reading means smaller agent
vibration resulting in a small area covered whilst a
lower pollutant reading results in higher agent vibra-
tion resulting in a larger area being covered.
More detailed information on BCT behaviour can be
found in our previous publications (Oyekan et al. 2010;
Oyekan and Hu 2010).
3.2. Flocking behaviour
The flocking behaviour is used to keep the agents
together with a certain distance between each other
and to aid each individual ‘bacteria’ agent in finding
the source of the pollutant through group reinforce-
ment foraging. For the flocking behaviour, a general-
ised Morse potential given below is used.
ufi ¼ GG GR exp �
r
20
� �
� GA exp �r
20
� �� �
where the repulsion gain GR¼ 1 and the attractant gain
GA¼ 0.99 are used in our simulations and experiments,
and r is the Euclidean distance between two mobile
agents. It was discovered that it is possible to control
how closely the agents get to each other whilst not
colliding by adjusting the GG gain.
The outputs from the bacteria chemotaxis and
flocking behaviours are fused together to generate a
final speed control output ui for agent i:
ui ¼ GFufi þ GBu
bi
where the gains of GB¼ 0.8 and GF¼ 0.8 are used in
our simulations and experiments.
4. Simulation results
In the simulations, each agent knew its position in the
simulated arena. Only local communication between
neighbour sensor agents was allowed to exchange
information. For the SVR-CVT algorithm, the
exchanged information includes agent position and
model parameters. For the BCT-FLK algorithm, the
exchanged information includes agent position only.
4.1. SVR-CVT results
The simulation environment was constructed in a 1 1
area. The targeted pollutant distribution was a static
function with doughnut shape:
f ðqÞ ¼ 0:5 exp �ðx� 0:5Þ2 þ ð y� 0:5Þ2
�21
� �
� 0:5 exp �ðx� 0:5Þ2 þ ð y� 0:5Þ2
�22
� �
where �21 ¼ 0:07 and �2
2 ¼ 0:025. A mobile sensor
network with N¼ 25 agents was used, and the
communication range of each agent was set to 0.2.
The SVR algorithm with 10 loops was nested in each
iteration of the CVT algorithm.
International Journal of Systems Science 5
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

At the beginning of this simulation, 25 agents were
randomly deployed at a corner of the simulation
environment, as shown in the bottom right panel of
Figure 1. The initial result is in the top right panel of
Figure 1. When comparing it with the true pollutant
distribution in the top left panel of Figure 1, they are
quite different. This is because the agents did not have
enough knowledge about the environment and their
locations were not optimised. The error curve in the
bottom left panel of Figure 1 shows the modelling
error in the first CVT loop.
Figures 2, 3, and 4 show how the agents optimise
their locations and learn the pollutant model at 20, 40
and 60 CVT loops, respectively. The true distribution
(top left), the modelling distribution (top right), the
modelling error (bottom left) and the agent distribu-
tion (bottom right) clearly show the process of all the
agents simultaneously modelling the observation and
exploiting the model to cover as much of the area as
possible. The final modelling distribution is very close
to the true distribution after 60 loops.
4.2. BCT-FLK results
The BCT-FLK simulation was conducted with 50
mobile agents in a 100 100 area. The agents were able
to communicate with agents within a radius of
5 around them. In the simulations, the distribution
functions were not directly sampled, but the particles
sampled from the distribution functions using Monte
Carlo methods were used. The particles simulated the
pollutant particles and the sensors were able to sample
the particle concentration.
Figures 5 to 8 show how the mobile sensor agents
are distributed at the final stage in different pollutant
distributions within the same time step. Four distribu-
tions were used: skewed Gaussian distribution,
Gaussian distribution, double Gaussian distribution
and doughnut distribution. They were used to demon-
strate that the BCT-FLK algorithm was able to explore
the different environments and the agents were
distributed in the same way as the underlying true
distributions.
5. Experimental results
Six networked wifibots were used to test two
approaches. The testing environment was chosen in a
4000 4000mm rectangle area with a range from
�2000mm to 2000mm in x and y axis in our Robotic
Arena. The location of each robot was provided by
VICON motion capture system equipped in the arena.
As the testing environment was limited, the pollutant
Figure 1. Initial state of simulation.
6 B. Lu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

Figure 2. Simulation result after 20 loops.
Figure 3. Simulation result after 40 loops.
International Journal of Systems Science 7
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

Figure 4. Simulation result after 60 loops.
Figure 5. Skewed Gaussian distribution.
8 B. Lu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

Figure 6. Gaussian distribution.
Figure 7. Double Gaussian distribution.
International Journal of Systems Science 9
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

was only simulated by a Gaussian distribution in a
computer:
f ðqÞ ¼ Ae�ðx�aÞ2þð y�bÞ2
�2 ð12Þ
where A, a, b and � were defined individually in SVR-
CVT and BCT-FLK algorithms.
5.1. SVR-CVT results
The parameters of Equation (12) were defined as
follows: A¼ 0.5, a¼ 0.5, b¼ 0.5 and �2¼ 0.05. Figure 9
shows the trajectories of six wifibots, which were
recorded by VICON motion capture system. In
Figure 9, the blue circles show the initial positions of
agents and red squares show the optimised positions of
each of them. Curves are the trajectories travelled by
six wifibots with the SVR-CVT algorithm. The dotted
lines show the Voronoi tessellation cells at the end of
the test.
Figures 10 and 11 are two snap shots from a video
clip captured by a downward camera during the test.
Figure 10 shows the initial distribution of six wifibots,
which were randomly deployed. Figure 11 shows the
final optimised distribution of six wifibots. Their
locations were matched to the true distribution.
5.2. BCT-FLK results
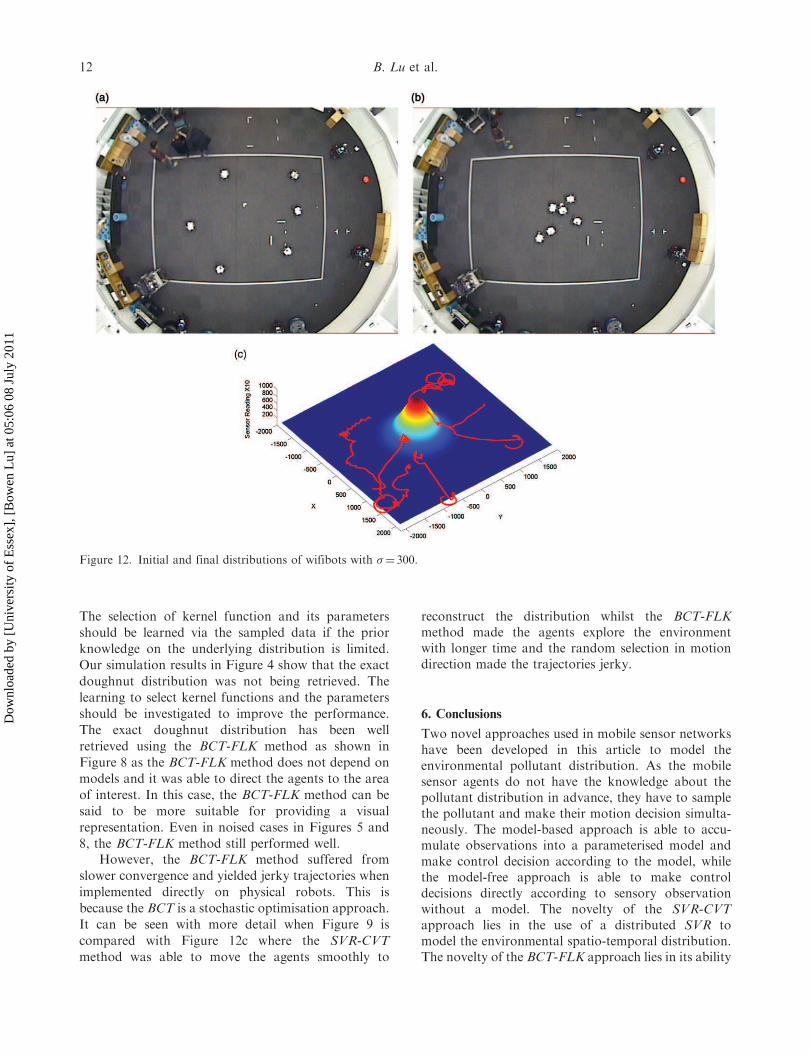
The test was conducted using two different Gaussian
distributions with the same values of A¼ 100, a¼ 0,
b¼ 0 and different standard deviations of �¼ 300 and
�¼ 1000. Figures 12a and 13 show how the six wifibots
formed the distribution. The initial locations are shown
in Figures 12a and 13a, the final locations are shown in
Figures 12b and 13b and the trajectories with the true
distribution are shown in Figures 12c and 13c. It can be
found that the trajectories were not very smooth and
there were some circles where the robots turned around
at the initial stage. This is due to the nature of the
bacteria chemotaxis behaviour, i.e. they are explora-
tory. However, the behaviour became more and more
stable when the agents got closer to the centre of the
pollutant source. In the end, the wifibots were able to
distribute themselves based upon the true Gaussian
distributions.
5.3. Discussions
In mobile sensor networks, collision avoidance is one
of the fundamental functions. The SVR-CVT method
deals with collision avoidance implicitly due to the fact
that each agent is controlled to move to the mass centre
of its Voronoi cell. The BCT-FLK method deals with
collision avoidance explicitly via the use of an artificial
separation potential functions. Our simulation and real
experimental results have demonstrated this point.
As it has been stated that the kernel function of the
SVR-CVT method is related to the underlying
distribution, the finite support kernel function we
used is just for implementing a distributed SVR.
Figure 8. Doughnut distribution.
10 B. Lu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011
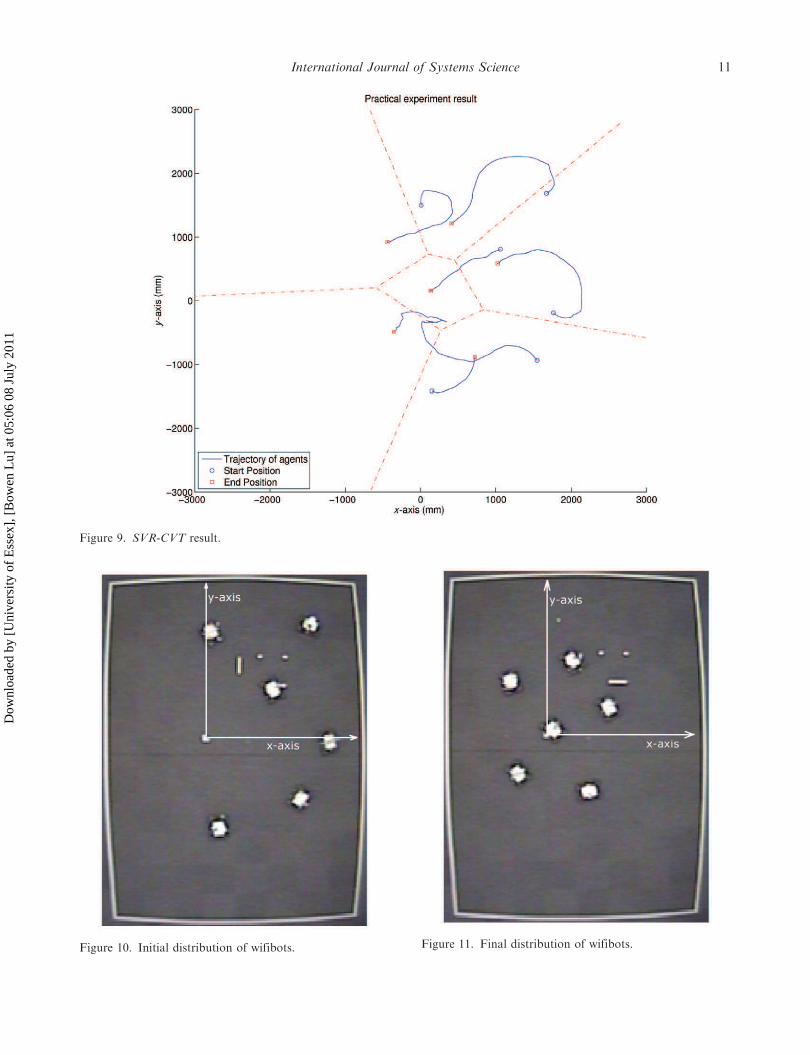
Figure 9. SVR-CVT result.
Figure 10. Initial distribution of wifibots. Figure 11. Final distribution of wifibots.
International Journal of Systems Science 11
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011
The selection of kernel function and its parameters
should be learned via the sampled data if the prior
knowledge on the underlying distribution is limited.
Our simulation results in Figure 4 show that the exact
doughnut distribution was not being retrieved. The
learning to select kernel functions and the parameters
should be investigated to improve the performance.
The exact doughnut distribution has been well
retrieved using the BCT-FLK method as shown in
Figure 8 as the BCT-FLK method does not depend on
models and it was able to direct the agents to the area
of interest. In this case, the BCT-FLK method can be
said to be more suitable for providing a visual
representation. Even in noised cases in Figures 5 and
8, the BCT-FLK method still performed well.
However, the BCT-FLK method suffered from
slower convergence and yielded jerky trajectories when
implemented directly on physical robots. This is
because the BCT is a stochastic optimisation approach.
It can be seen with more detail when Figure 9 is
compared with Figure 12c where the SVR-CVT
method was able to move the agents smoothly to
reconstruct the distribution whilst the BCT-FLK
method made the agents explore the environment
with longer time and the random selection in motion
direction made the trajectories jerky.
6. Conclusions
Two novel approaches used in mobile sensor networks
have been developed in this article to model the
environmental pollutant distribution. As the mobile
sensor agents do not have the knowledge about the
pollutant distribution in advance, they have to sample
the pollutant and make their motion decision simulta-
neously. The model-based approach is able to accu-
mulate observations into a parameterised model and
make control decision according to the model, while
the model-free approach is able to make control
decisions directly according to sensory observation
without a model. The novelty of the SVR-CVT
approach lies in the use of a distributed SVR to
model the environmental spatio-temporal distribution.
The novelty of the BCT-FLK approach lies in its ability
Figure 12. Initial and final distributions of wifibots with �¼ 300.
12 B. Lu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

to reconstruct a distribution without relying on a
model. We have found that both of them can be used
to distribute mobile sensor agents in a pattern matched
to the underlying pollutant distribution. Our simula-
tion results and experimental results presented confirm
this point.
We plan to investigate an integrated approach
using the model-free approach at the early stage to
explore the environment while using the model-based
approach at the later stage to exploit the accumulated
knowledge.
The underlying distributions we used are simple
mathematical functions. As nature pollutants have
more complex property both in spatial and in temporal
domain, simulating realistic pollutant models is one of
the current research topics. With realistic pollutant
simulation, we are able to investigate more complex
modelling techniques and motion control techniques.
Acknowledgements
This research work was financially sponsored by EuropeanUnion FP7 program, no. ICT-231646, SHOAL.
Notes on contributors
Bowen Lu is a PhD candidate in theSchool of Computer Science andElectronic Engineering, University ofEssex, United Kingdom. He receivedhis BEng in Optical InformationScience and Technology fromShenzhen University (Guangdong,P.R. China) in 2008 and his MSc inEmbedded Systems from University
of Essex. Currently, he is researching on various distributedmethods for pollution monitoring. Specifically, it includescoverage control algorithms for wireless sensor network andpollutant distribution estimation. He has served as a reviewerof ICRA, IROS and other international conferences. Also, heis a student member of IEEE.
John Oyekan received his BEng(Hons) in Electronics Technologyfrom the University of Coventry in2006 and his MSc in EmbeddedSystems and Robotics fromUniversity of Essex in 2008. He iscurrently working toward a PhDdegree at the University of Essex.His research interests include using
Figure 13. Initial and final distributions of wifibots with �¼ 1000.
International Journal of Systems Science 13
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

bio inspired methods to solve engineering problems andsolving problems related to Unmanned Aerial Vehicles. Hehas published five conference papers, over two journals andco-authored two book chapters in these areas. He is also areviewer of various international conferences such asROBIO, ICRA and IROS among others.
Dongbing Gu is a Reader in School ofComputer Science and ElectronicEngineering at the University ofEssex, UK. His current research inter-ests include multi-agent systems, wire-less sensor networks, distributedcontrol algorithms, distributed infor-mation fusion, cooperative control,reinforcement learning, fuzzy logic
and neural network based motion control and modelpredictive control. He has published over 100 papers ininternational journals and conferences. He has also served asthe member of organising committees and programmecommittees for many IEEE conferences. Dr Gu is themember of several IEEE technical committees and a seniormember of IEEE.
Huosheng Hu is a Professor in theSchool of Computer Science andElectronic Engineering, University ofEssex, UK, leading the human-centred robotics research. His researchinterests include autonomous robots,human-robot interaction, rehabilita-tion robotics, embedded systems,multi-robot collaboration, pervasive
computing, sensor integration, intelligent control and net-worked robotics. He has published over 300 papers injournals, books and conferences, and received a number ofbest paper awards. Prof Hu is a founding member of IEEERobotics and Automation Society Technical committee onNetworked Robots, a Fellow of IET and InstMC and asenior member of IEEE and ACM. He has been a ProgramChair or a Committee member for many internationalconferences such as IEEE ICRA, IROS, ICMA, ROBIO,IASTED RA, CA and CI. He currently serves as Editor-in-Chief for International Journal of Automation and Computing.He is a reviewer for many international journals such asIEEE Transactions on Robotics, Automatic Control, NeuralNetworks and the International Journal of Robotics Research.Since 2000 he has been a Guest Professor at six universitiesin China: Central South University, Shanghai University,Xiamen University, Chongqing University of Post andTelecommunication, Kunming University of Science andTechnology and Northeast Normal University
References
Baronov, D., and Baillieul, J. (2008), ‘Autonomous Vehicle
Control for Ascending/Descending Along a Potential Field
with Two Applications’, in Proceedings of the American
Control Conference, pp. 678–683.
Brown, D.A., and Berg, H.C. (1974), ‘Temporal Stimulation
of Chemotaxis in Escherichia coli’, Proceedings of the
National Academy of Science USA, 71, 1388–1392.
Choi, J., Lee, J., and Oh, S. (2008), ‘Swarm Intelligence for
Achieving the Global Maximum using Spatio-temporal
Gaussian Processes’, in American Control Conference,
pp. 135–140.
Corrigan, C.E., Roberts, G.C., Ramana, M.V., Kim, D., and
Ramanathan, V. (2007), ‘Capturing Vertical Profiles of
Aerosols and Black Carbon Over the Indian Ocean using
Autonomous Unmanned Aerial Vehicles’, Atmospheric
Chemistry and Physics Discussions, 7, 11429–11463.
Cortes, J. (2009), ‘Distributed Kriged Kalman Filter for
Spatial Estimation’, IEEE Transactions on Automatic
Control, 54, 2816–2827.
Cortes, J., and Bullo, F. (2005), ‘Coordination and
Geometric Optimisation via Distributed Dynamical
Systems’, SIAM Journal of Control Optimization, 44,
1543–1574.
Cortes, J., Martinez, S., Karatas, T., and Bullo, F. (2004),
‘Coverage Control from Mobile Sensing Networks’, IEEE
Transactions on Robotics and Automation, 20, 243–255.
Dhariwal, A., Sukhatme, G.S., and Requicha, A.A.G.
(2004), ‘Bacterium-inspired Robots for Environmental
Monitoring’, in Proceedings of IEEE International
Conference on Robotics and Automation, New Orleans,
LA, April, pp. 1436–1443.
Leonard, N.E., Paley, D., Lekien, F., Sepulchre, R.,
Fratantoni, D.M., and Davis, R. (2007), ‘Collective
Motion, Sensor Networks and Ocean Sampling’,
Proceedings of the IEEE, 95, 48–74.
Lilienthal, A., and Duckett, T. (2003), ‘Experimental
Analysis of Smelling Braitenberg Vehicles’,
in Proceedings of the IEEE International Conference on
Advanced Robotics (ICAR), pp. 375–380.
Lynch, K.M., Schwartz, I.B., Yang, P., and Freeman, R.A.
(2008), ‘Decentralised Environmental Modelling by
Mobile Sensor Networks’, IEEE Transactions on
Robotics, 24, 710–724.
Marques, L., Nunes, U., and Almeida, T.D. (2002),
‘Olfaction-based Mobile Robot Navigation’, Thin Solid
Films, 418, 51–58.
Martinez, S. (2010), ‘Distributed Interpolation Schemes for
Field Estimation by Mobile Sensor Networks’, IEEE
Transactions on Control Systems Technology, 18, 491–500.
Mayhew, C.G., Sanfelice, R.G., and Teel, A.R. (2008),
‘Robust Source-seeking Hybrid Controllers for
Nonholonomic Vehicles’, in Proceedings of the American
Control Conference, pp. 2722–2727.
Merino, L.F., Caballero, J.R., de Dios, J.M., and Ferruz,
A.O. (2006), ‘A Cooperative Perception System for
Multiple UAVs: Application to Automatic Detection of
Forest Fires’, Journal of Field Robotics, 23, 165–184.
Mesquita, A., Hespanha, J., and Astrom, K. (2008),
‘Optimotaxis: A Stochastic Multi-agent Optimisation
Procedure with Point Measurements’, Hybrid Systems:
Computation and Control, 4981, 358–371.
Oyekan, J., and Hu, H. (2010), ‘Bacteria Controller
Implementation on a Physical Platform for Pollution
Monitoring’, In 2010 IEEE International Conference on
Robotics and Automation (ICRA), 3–7 May, Anchorage,
AK, pp. 3781–3786.
14 B. Lu et al.
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011

Oyekan, J., Hu, H., and Gu, D. (2010), ‘Bio-inspired
Coverage of Invisible Hazardous Substances in
the Environment’, International Journal of Information
Acquisition, 7, 193–204.
Pimenta, L.C.A., Kumar, V., Mesquita, R.C., and Pereira,
G.A.S. (2008), ‘Sensing and Coverage for a Network of
Heterogeneous Robots’, in Proceedings of the IEEE
Conference on Decision and Control, pp. 3947–3952.
Predd, J.B., Kulkarni, S.R., and Poor, H.V. (2006),
‘Distributed Learning in Wireless Sensor Networks’,
IEEE Signal Processing Magazine, 23, 56–69.
Rabbat, M.G., and Nowak, R.D. (2006), ‘Quantized
Incremental Algorithms for Distributed Optimisation’,
IEEE Journal of Special Areas Comunication, 23, 798–808.
Schwager, M., Rus, D., and Slotine, J. (2009),
‘Decentralised, Adaptive Coverage Control for
Networked Robots’, International Journal of Robotics
Research, 28, 357–375.
Smola, A.J., and Scholkopf, B. (2004), ‘A Tutorial on
Support Vector Regression’, Statistics and Computing, 14,
199–222.
Vapnik, V.N. (1999), The Nature of Statistical Learning
Theory (Statistics for Engineering and Information Science)
(2nd ed.), eds. M. Jordan and S.L. Lauritzen, New York:
Springer Verlag.
Vijayakumar, S., and Wu, S. (1999), ‘Sequential Support
Vector Classifiers and Regression’, [Online]. Available at:
citeseer.ist.psu.edu/article/vijayakumar99sequential.html
Yi, T., Huang, Y., Simon, M., and Doyle, J. (2000), ‘Robust
Perfect Adaptation in Bacterial Chemotaxis Through
Integral Feedback Control’, Proceedings of the National
Academy of Science, 97, 4649–4653.
International Journal of Systems Science 15
Dow
nloa
ded
by [
Uni
vers
ity o
f E
ssex
], [
Bow
en L
u] a
t 05:
06 0
8 Ju
ly 2
011




















