Localized topology control algorithms for heterogeneous wireless networks
12
IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 6, DECEMBER 2005 1313 Localized Topology Control Algorithms for Heterogeneous Wireless Networks Ning Li, Student Member, IEEE, and Jennifer C. Hou, Senior Member, IEEE Abstract—Most existing topology control algorithms assume homogeneous wireless networks with uniform maximal trans- mission power, and cannot be directly applied to heterogeneous wireless networks where the maximal transmission power of each node may be different. We present two localized topology control algorithms for heterogeneous networks: Directed Relative Neigh- borhood Graph (DRNG) and Directed Local Spanning Subgraph (DLSS). In both algorithms, each node independently builds its neighbor set by adjusting the transmission power, and defines the network topology by using only local information. We prove that: 1) both DRNG and DLSS can preserve network connectivity; 2) the out-degree of any node in the resulting topology generated by DRNG or DLSS is bounded by a constant; and 3) DRNG and DLSS can preserve network bi-directionality. Simulation results indicate that DRNG and DLSS significantly outperform existing topology control algorithms for heterogeneous networks in several aspects. Index Terms—Connectivity, energy management, heterogeneous networks, topology control. I. INTRODUCTION M ANY new challenges have emerged in the system de- sign and analysis of wireless ad hoc networks. Energy efficiency [7] and network capacity [5] are among the most fun- damental issues. Various topology control algorithms have been proposed to address these two challenges. Instead of transmit- ting with the maximal power, all nodes in a wireless ad hoc net- work collaboratively determine the transmission power and de- fine the network topology by forming the proper neighbor rela- tion. By enabling wireless nodes to use proper transmission power (which is usually much smaller than the maximal transmission power), topology control can not only save energy and prolong network lifetime, but also improve spatial reuse (and hence the network capacity) and mitigate the MAC-level medium contention [15]. Several topology control algorithms [2], [8], [9], [11], [13], [15]–[17], [20] have been proposed to create power-efficient network topology in wireless multi-hop net- works with limited mobility. However, most of them (except [17] and [20]) assume homogeneous wireless nodes with uniform maximal transmission power. Manuscript received July 1, 2004; approved by IEEE/ACM TRANSACTIONS ON NETWORKING Editor N. Shroff. This work was supported in part by the Na- tional Science Foundation under Grant ANI-0221357 and by MURI/AFOSR under Contract F49620-00-1-0330. Any opinions, findings, and conclusions or recommendations expressed in this paper are those of the authors and do not necessarily reflect the views of the funding agency. A preliminary version of this paper was presented at the IEEE INFOCOM, Hong Kong, March 2004. The authors are with the Department of Computer Science, University of Illinois at Urbana-Champaign, Urbana, IL 61801-2302 USA (e-mail: [email protected]; [email protected]). Digital Object Identifier 10.1109/TNET.2005.860095 The assumption of homogeneous networks does not always hold in practice, since even devices of the same type may have slightly different maximal transmission power, and there also exist devices of dramatically different capabilities in the net- work. As will be illustrated in Section IV, most existing al- gorithms cannot be directly applied to heterogeneous wireless multi-hop networks in which the maximal transmission power of each node may be different. In this paper, we propose two localized topology control algorithms for heterogeneous wireless multi-hop networks with nonuniform maximal transmission power: Directed Relative Neighborhood Graph (DRNG) and Directed Local Spanning Subgraph (DLSS). In both algorithms, the topology is con- structed by having each node adjust its transmission power based on the locally collected information. It can be proved that: 1) the topology derived by DRNG or DLSS preserves network connectivity, i.e., if the original topology generated by having each node use its maximal transmission power is strongly connected, then the topology generated by DRNG or DLSS is also strongly connected; 2) the out-degree of any node in the topology generated by DRNG or DLSS is bounded by a constant; and 3) the topology generated by DRNG or DLSS preserves network bi-directionality, i.e., if the original topology by having each node use its maximal transmission power is bi-directional, then the topology generated by DRNG or DLSS is also bi-directional after some simple operations. Simulation results indicate that, compared with other ex- isting topology control algorithms that can be applied to heterogeneous networks, DRNG and DLSS derive topologies with smaller average node degrees (both logical and physical), smaller average link lengths, and smaller average radii. To the best of our knowledge, this is among the first efforts to formally address the connectivity and bi-directionality issues in the context of topology control for heterogeneous wireless networks. The rest of the paper is organized as follows. The network model is first described in Section II. We then summarize pre- vious work on topology control in Section III, and give examples to show why existing algorithms cannot be directly applied to heterogeneous networks in Section IV. We present DRNG and DLSS algorithms in Section V, and prove several of their nice properties in Section VI. Finally, we evaluate the performance of the proposed algorithms in Section VII, and conclude the paper in Section VIII. II. NETWORK MODEL The topology of a heterogeneous wireless network can be represented by a directed simple graph in the plane, where is the set of 1063-6692/$20.00 © 2005 IEEE
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Localized topology control algorithms for heterogeneous wireless networks

IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 6, DECEMBER 2005 1313
Localized Topology Control Algorithms forHeterogeneous Wireless Networks
Ning Li, Student Member, IEEE, and Jennifer C. Hou, Senior Member, IEEE
Abstract—Most existing topology control algorithms assumehomogeneous wireless networks with uniform maximal trans-mission power, and cannot be directly applied to heterogeneouswireless networks where the maximal transmission power of eachnode may be different. We present two localized topology controlalgorithms for heterogeneous networks: Directed Relative Neigh-borhood Graph (DRNG) and Directed Local Spanning Subgraph(DLSS). In both algorithms, each node independently builds itsneighbor set by adjusting the transmission power, and defines thenetwork topology by using only local information. We prove that:1) both DRNG and DLSS can preserve network connectivity; 2)the out-degree of any node in the resulting topology generatedby DRNG or DLSS is bounded by a constant; and 3) DRNG andDLSS can preserve network bi-directionality. Simulation resultsindicate that DRNG and DLSS significantly outperform existingtopology control algorithms for heterogeneous networks in severalaspects.
Index Terms—Connectivity, energy management, heterogeneousnetworks, topology control.
I. INTRODUCTION
MANY new challenges have emerged in the system de-sign and analysis of wireless ad hoc networks. Energy
efficiency [7] and network capacity [5] are among the most fun-damental issues. Various topology control algorithms have beenproposed to address these two challenges. Instead of transmit-ting with the maximal power, all nodes in a wireless ad hoc net-work collaboratively determine the transmission power and de-fine the network topology by forming the proper neighbor rela-tion.
By enabling wireless nodes to use proper transmission power(which is usually much smaller than the maximal transmissionpower), topology control can not only save energy and prolongnetwork lifetime, but also improve spatial reuse (and hencethe network capacity) and mitigate the MAC-level mediumcontention [15]. Several topology control algorithms [2], [8],[9], [11], [13], [15]–[17], [20] have been proposed to createpower-efficient network topology in wireless multi-hop net-works with limited mobility. However, most of them (except[17] and [20]) assume homogeneous wireless nodes withuniform maximal transmission power.
Manuscript received July 1, 2004; approved by IEEE/ACM TRANSACTIONS
ON NETWORKING Editor N. Shroff. This work was supported in part by the Na-tional Science Foundation under Grant ANI-0221357 and by MURI/AFOSRunder Contract F49620-00-1-0330. Any opinions, findings, and conclusions orrecommendations expressed in this paper are those of the authors and do notnecessarily reflect the views of the funding agency. A preliminary version ofthis paper was presented at the IEEE INFOCOM, Hong Kong, March 2004.
The authors are with the Department of Computer Science, Universityof Illinois at Urbana-Champaign, Urbana, IL 61801-2302 USA (e-mail:[email protected]; [email protected]).
Digital Object Identifier 10.1109/TNET.2005.860095
The assumption of homogeneous networks does not alwayshold in practice, since even devices of the same type may haveslightly different maximal transmission power, and there alsoexist devices of dramatically different capabilities in the net-work. As will be illustrated in Section IV, most existing al-gorithms cannot be directly applied to heterogeneous wirelessmulti-hop networks in which the maximal transmission powerof each node may be different.
In this paper, we propose two localized topology controlalgorithms for heterogeneous wireless multi-hop networks withnonuniform maximal transmission power: Directed RelativeNeighborhood Graph (DRNG) and Directed Local SpanningSubgraph (DLSS). In both algorithms, the topology is con-structed by having each node adjust its transmission powerbased on the locally collected information. It can be provedthat: 1) the topology derived by DRNG or DLSS preservesnetwork connectivity, i.e., if the original topology generatedby having each node use its maximal transmission power isstrongly connected, then the topology generated by DRNG orDLSS is also strongly connected; 2) the out-degree of any nodein the topology generated by DRNG or DLSS is bounded bya constant; and 3) the topology generated by DRNG or DLSSpreserves network bi-directionality, i.e., if the original topologyby having each node use its maximal transmission power isbi-directional, then the topology generated by DRNG or DLSSis also bi-directional after some simple operations.
Simulation results indicate that, compared with other ex-isting topology control algorithms that can be applied toheterogeneous networks, DRNG and DLSS derive topologieswith smaller average node degrees (both logical and physical),smaller average link lengths, and smaller average radii. Tothe best of our knowledge, this is among the first efforts toformally address the connectivity and bi-directionality issuesin the context of topology control for heterogeneous wirelessnetworks.
The rest of the paper is organized as follows. The networkmodel is first described in Section II. We then summarize pre-vious work on topology control in Section III, and give examplesto show why existing algorithms cannot be directly applied toheterogeneous networks in Section IV. We present DRNG andDLSS algorithms in Section V, and prove several of their niceproperties in Section VI. Finally, we evaluate the performance ofthe proposed algorithms in Section VII, and conclude the paperin Section VIII.
II. NETWORK MODEL
The topology of a heterogeneous wireless network can berepresented by a directed simple graphin the plane, where is the set of
1063-6692/$20.00 © 2005 IEEE

1314 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 6, DECEMBER 2005
nodes (vertices) in the network and is the set of links(edges). Assume that the area that a transmission can cover isa disk centered at the transmitter (we will relax this assump-tion in Section VI-E). We define the transmission range of anode , denoted , as the radius of the disk that can coverusing its maximal transmission power. In a heterogeneous net-work, the transmission ranges of nodes may be different. Let
and .An ordered pair represents an edge from node to nodeif , where is the Euclidean distance. Note
that and are two different edges. A unique id (suchas an IP/MAC address) is assigned to each node.
In the proposed algorithms, the information needed by eachnode is the the knowledge of the existing edges in the localneighborhood. An edge that was not formed in the network, ei-ther because the two end-nodes are not within the transmissionrange of each other, or because there exists an obstacle in be-tween, does not have any impact on the results. As long as theoriginal topology (which has taken into account the obstacles inthe network) is strongly connected, our algorithms can be ap-plied to preserve the connectivity. This implies that whether ornot obstacles exist in the deployment area does not affect thevalidity of the proposed algorithms.
Before delving into the technical discussion and algorithmdescription, we give several definitions that will be usedthroughout the paper.
Definition 1 (Visible Neighborhood): The visible neighbor-hood is the set of nodes that node can reach by using itsmaximal transmission power, i.e.,
. For each node , letbe the induced subgraph of such that .
Each edge in is assigned a weight. Two points are worthmentioning here. Firstly, to build the power-efficient spanninggraph, the weight of an edge should be the minimal trans-mission power for to reach . As power consumption is gen-erally in the form of ( ), which is a strictlyincreasing function of the Euclidean distance, for now it suf-fices to use the Euclidean distance. More discussions will begiven in Section VI-E on how to use the power consumption asthe measure of weight. Secondly, to ensure that two edges withdifferent end-vertices have different weights, we use the ids ofthe end-vertices as tie-breakers.
Definition 2 (Weight Function): For any edge , theweight function maps to a 3-tuple, i.e.,
.Given two edges ,
It is obvious that two edges with different end-vertices have dif-ferent weights, and two edges with the same end-vertices havethe same weight, i.e., .
Definition 3 (Neighbor Set): Node is an out-neighbor ofnode (and is an in-neighbor of ) under an algorithm ALG,denoted , if and only if there exists an edge inthe topology generated by the algorithm. In particular, we use
to denote the neighbor relation in . if andonly if and . The Out-Neighbor Set of nodeis , and the In-Neighbor
Set of is .Definition 4 (Radius): The radius, , of node is defined
as the Euclidean distance between and its farthest neighbor,i.e, .
Definition 5 (Degree): The out-degree of a node underan algorithm ALG, denoted , is the number of out-neighbors of , i.e., . Similarly, thein-degree of a node , denoted , is the number ofin-neighbors, i.e., .
What we just defined is usually referred as the logical nodedegree. It is often necessary to consider the physical node de-gree, i.e., the number of nodes within the transmission radius.
Definition 6 (Topology): The topology gener-ated by an algorithm ALG is a directed graph
, where ,
and .Definition 7 (Connectivity): For any topology gener-
ated by an algorithm ALG, node is said to be con-nected to node (denoted ) if there exists a path
such that, where . It fol-
lows that if and for some .Definition 8 (Bi-Directionality): A topology generated by an
algorithm ALG is bi-directional, if for any two nodes, implies . In other
words, the topology generated by A is bi-directional if all edgesin the topology are bi-directional.
Definition 9 (Bi-Directional Connectivity): For anytopology generated by an algorithm ALG, node is saidto be bi-directionally connected to node (denoted )if there exists a path
such that , where. It follows that
if and for some .Deriving network topologies consisting of only bi-direc-
tional links facilitates link level acknowledgment in wirelessnetworks, which is a critical operation for data transmissionsand retransmissions over unreliable wireless media. Bi-direc-tionality is also crucial to the correctness of the floor acquisitionmechanisms such as the RTS/CTS in IEEE 802.11.
Definition 10 (Addition and Removal): The Addition oper-ation is to add an extra edge into if
and . The Removal operation isto delete any edge if .Let and denote the resulting topologies after ap-plying Addition and Removal to , respectively.

LI AND HOU: LOCALIZED TOPOLOGY CONTROL ALGORITHMS FOR HETEROGENEOUS WIRELESS NETWORKS 1315
Both Addition and Removal attempt to create a bi-directionaltopology by either converting uni-directional edges into bi-di-rectional ones or removing all uni-directional edges. For ho-mogeneous networks, the resulting topology after Addition orRemoval is alway bi-directional. For heterogeneous networks,the resulting topology after Removal is alway bi-directional, al-though it may not be strongly connected. The resulting topologyafter Addition is not necessarily bi-directional, as the operationmay attempt to increase the transmission power of a node to alevel beyond its capability.
III. RELATED WORK
In this section, we summarize several topology control algo-rithms [2], [8], [9], [11], [13], [15]–[17], [20]. Examples will begiven in the next section to explain why these algorithms cannotbe directly applied to heterogeneous networks.
Rodoplu et al. [17] (denoted R&M) introduced the notion ofrelay region and enclosure for the purpose of power control.Instead of transmitting directly, a node chooses to relay throughother nodes if less power will be consumed. It is shown thatthe network is strongly connected if every node maintains linkswith the nodes in its enclosure and the resulting topology isa minimum power topology. The major drawback of R&M isthat it requires an explicit radio propagation model to computethe relay region, hence the resulting topology is sensitive to themodel used in the computation. Also, it assumes there is onlyone data sink (destination) in the network.
Ramanathan et al. [16] presented two centralized algorithmsto minimize the maximal power used per node while main-taining the (bi)connectivity of the network. They introduced twodistributed heuristics for mobile networks. Both centralized al-gorithms require global information, and thus cannot be directlydeployed in the case of mobility. And the distributed heuristicscannot guarantee the preservation of network connectivity.
COMPOW [15] and CLUSTERPOW [8] are approaches im-plemented in the network layer. Both hinge on the idea that ifeach node uses the smallest common power required to main-tain network connectivity, the traffic carrying capacity of the en-tire network is maximized, the battery life is extended, and theMAC-level contention is mitigated. The major drawback is itssignificant message overhead, since each node has to run mul-tiple daemons, each of which has to exchange link state infor-mation with the counterparts at other nodes.
[9] is a localized algorithm in which each nodefinds the minimum power such that the maximum angle betweenany two consecutive neighbors is at most . The algorithm hasbeen proved to preserve network connectivity if . Sev-eral optimization methods are also discussed to further reducethe transmitting power.
To facilitate the following discussion, we first define the Rel-ative Neighborhood Graph (RNG) [19], [18].
Definition 11 (Neighbor Relation in RNG): if andonly if there does not exist a third node such that
and . Or equivalently, there is nonode inside the shaded area in Fig. 1(a).
Borbash and Jennings [2] proposed to use RNG for topologyinitialization of wireless networks. Based on the local knowl-
Fig. 1. Definitions. (a) Relative neighborhood graph (RNG). (b) Modifiedrelative neighborhood graph (MRNG) (to be defined in Section IV). (c) Directedrelative neighborhood graph (DRNG) (to be defined in Section V).
edge, each node makes decisions to derive the network topologybased on RNG. The derived network topology has been reportedto exhibit good performance in terms of power usage, interfer-ence, and reliability. The XTC algorithm proposed by Watten-hofer and Zollinger [20] is also based on RNG.
Li et al. [13] presented the Localized Delaunay Triangulation,a localized protocol that constructs a planar spanner of the UnitDisk Graph (UDG). The topology contains all edges that areboth in the unit-disk graph and the Delaunay triangulation ofall nodes. It is proved that the shortest path in this topologybetween any two nodes and is at most a constant factor of theshortest path connecting and in UDG. However, the notionof UDG and Delaunay triangulation cannot be directly extendedto heterogeneous networks.
In [11], we proposed Local Minimum Spanning Tree (LMST)for topology control in homogeneous wireless multi-hop net-works. In this algorithm, each node builds its local minimumspanning tree independently and only keeps on-tree nodes thatare one-hop away as its neighbors in the final topology. It isproved that: 1) the topology derived under LMST preserves thenetwork connectivity; 2) the node degree of any node in theresulting topology is bounded by 6; and 3) the topology canbe transformed into one with bi-directional links (without im-pairing the network connectivity) after removal of all uni-direc-tional links. Simulation results show that LMST can increasethe network capacity as well as reduce the energy consumption.

1316 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 6, DECEMBER 2005
Fig. 2. CBTC((2=3)�) may render disconnectivity in heterogeneousnetworks. (a) Original topology (without topology control) is stronglyconnected. (b) Topology by CBTC is not strongly connected: there is no pathfrom v to v .
Fig. 3. RNG may render disconnectivity in heterogeneous networks.(a) Original topology (without topology control) is strongly connected.(b) Topology by RNG is not strongly connected: there is no path from v to v .
IV. PROBLEMS OF EXISTING ALGORITHMS
Most existing topology control algorithms (except [17] and[20]) assume homogeneous wireless nodes with uniform trans-mission ranges. When directly applied to heterogeneous net-works, these algorithms may render disconnectivity. In this sec-tion, we give several examples to motivate the need for newtopology control algorithms in heterogeneous networks.
As shown in Fig. 2 (note that in Figs. 2–5 we use arrows toindicate the direction of the links), the network topology de-rived under [9] (without optimization) maynot preserve the connectivity, when the algorithm is directly ap-plied to a heterogeneous network. There is no path from to
due to the loss of edge , which is discarded bysince and have already provided the necessary coverage.
also has the same problem.Similarly, we show in Fig. 3 that the network topology derived
under RNG may be disconnected when the algorithm is directlyapplied to a heterogeneous network. There is no path fromto due to the loss of edge , which is discarded since
, and . As RNG isdefined for undirected graphs only, one may tailor its definitionfor directed graphs.
Definition 12 (Neighbor Relation in MRNG): For Mod-ified Relative Neighborhood Graph (MRNG),if and only if there does not exist a third node such that
, and ,[Fig. 1(b)].
As shown in Fig. 4, the topology derived under MRNG maystill be disconnected. There is no path from to due tothe loss of edge , which is discarded since
, and .One possible extension of LMST [11] is for each node to
build a local directed minimum spanning tree [3], [4], [1] andkeep only neighbors within one hop. Unfortunately, as shownin Fig. 5, the resulting topology does not preserve the strong
Fig. 4. MRNG may render disconnectivity in heterogeneous networks.(a) Original topology (without topology control) is strongly connected.(b) Topology by MRNG is not strongly connected: there is no path from v tov .
Fig. 5. An example that shows the algorithm in which each node builds alocal directed minimum spanning tree and only keeps the one-hop neighborsmay result in disconnectivity. (a) Original topology (without topology control)is strongly connected. (b) The local directed MST rooted at v . (c) The localdirected MST rooted at v . (d) The resulting topology is not strongly connected:there is no path from v to v .
connectivity. In the next section, we will modify this approachto preserve the connectivity.
V. DRNG AND DLSS
In this section, we propose two localized topology control al-gorithms for heterogeneous wireless multi-hop networks withnonuniform transmission ranges: Directed Relative Neighbor-hood Graph (DRNG) and Directed Local Spanning Subgraph(DLSS). Neither DRNG nor DLSS relies on any specific radiopropagation model. Being fully localized, they adapt well to mo-bility and incur less overhead.
In both algorithms, the network topology is constructed byhaving each node adjust its transmission power based on locallycollected information. Both algorithms are composed of threephases:
1) Information Collection: each node locally collects the in-formation of its visible neighborhood;
2) Topology Construction: each node defines the proper setof neighbors for the final topology, based on the informa-tion of the visible neighborhood.
3) Construction of Topology with Only Bi-Directional Links(Optional): each node adjusts its set of neighbors to makesure that all the edges are bi-directional.
A. Information Collection
In the stage of information collection, every node collectsthe information of its visible neighborhood . For homoge-neous networks, the information can be obtained locally if each

LI AND HOU: LOCALIZED TOPOLOGY CONTROL ALGORITHMS FOR HETEROGENEOUS WIRELESS NETWORKS 1317
Fig. 6. An example that shows having each node broadcast a Hello messageusing its maximal transmission power may be insufficient for some nodes (e.g.,node v ) to know their visible neighborhood. This figure also serves to showthat given an arbitrary direct graph, it may be impossible to derive a connected,bi-directional subgraph.
node broadcasts periodically a Hello message using its maximaltransmission power. The Hello message should at least includethe id, the maximal transmission power, and the position of thenode. Here we assume that each node is able to gather its lo-cation information via special hardware or localization serviceprovided by the network (see, for example, [6] for a summary).
Note that our algorithms can still operate if the position in-formation is unavailable, as only the knowledge of all the edgesin is required. can be constructed locally asfollows. First, each node periodically broadcasts, using itsmaximal transmission power, a very short Hi message whichincludes only its node id and its maximal transmission power.Upon receiving such a message from a neighbor node , es-timates the length of the edge based on the attenuationincurred in the transmission. Let the set of edges incident tobe denoted as . After node collectsthe information on , it can then broadcast this information inan Edge message. Each node will be able to infer basedon the Edge messages received from all of its neighbors. Al-though this solution may incur more communication and com-putation overhead, and make our algorithms less “localized,” iteliminates the need for the position information.
Another issue that is unique to heterogeneous networks canfurther complicate the process of obtaining . To obtain
, it may be insufficient for each node to broadcast peri-odically a Hello message using its maximal transmission power.For example, as shown in Fig. 6, is unable to know the po-sition of since cannot reach directly. For the ease ofpresentation, we assume for now that every node obtains its
by the end of the first phase. We will revisit this issuein Section VI-D.
B. Topology Construction
After obtaining , the neighbor relation in both algo-rithms can be defined as follows.
Definition 13 (Neighbor Relation in DRNG): For DirectedRelative Neighborhood Graph (DRNG), if and onlyif and there does not exist a third node suchthat and[see Fig. 1(c)].
Definition 14 (Neighbor Relation in DLSS): For DirectedLocal Spanning Subgraph (DLSS), if and only if
Fig. 7. DLSS algorithm.
, where is the output of (Fig. 7).Hence node is a neighbor of node if and only if node ison node ’s directed local spanning graph , and is one-hopaway from node .
DLSS is a natural extension of LMST [11] to heterogeneousnetworks. Instead of computing a directed local MST (whichminimizes the total cost of all the edges in the subgraph, and isshown to be incapable of maintaining connectivity in heteroge-neous networks in Section IV), each node computes a directedlocal subgraph according to the algorithm in Fig. 7 (which mini-mizes the maximum cost of all edges in the subgraph) and takeson-tree nodes that are one-hop away as its neighbors.
Each node broadcasts its own maximal transmission powerin the Hello or Hi message. By measuring the receiving powerof the messages, each node can determine the specific powerlevel required to reach each of its out-neighbors [11]. Nodethen uses the power level that can reach its farthest neighbor asits transmission power. This approach can be applied withoutknowing the actual radio propagation model.
C. Construction of Topology With Only Bi-Directional Edges
Since the final topology is determined independently by eachnode, some links in or may be uni-directional(see Fig. 12). We can apply either Addition or Removal to
and to obtain bi-directional topologies. Morediscussions will be given in Section VI-B.
VI. PROPERTIES OF DRNG AND DLSS
In this section, we prove the connectivity and bi-directionalityof DRNG and DLSS and derive the bounds for node degreein Sections VI-A–VI-C. Then we discuss how to deal with theproblem that arises in obtaining the visible neighborhoodin heterogeneous networks in Section VI-D, and how to relaxthe assumption of perfect omni-directional antenna patterns inSection VI-E . We always assume is strongly connected, i.e.,
in for any .
A. Connectivity
Lemma 1: For any edge , we have in.
Proof: Let all the edges be sorted in as-cending order of weight, i.e.,
1318 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 6, DECEMBER 2005
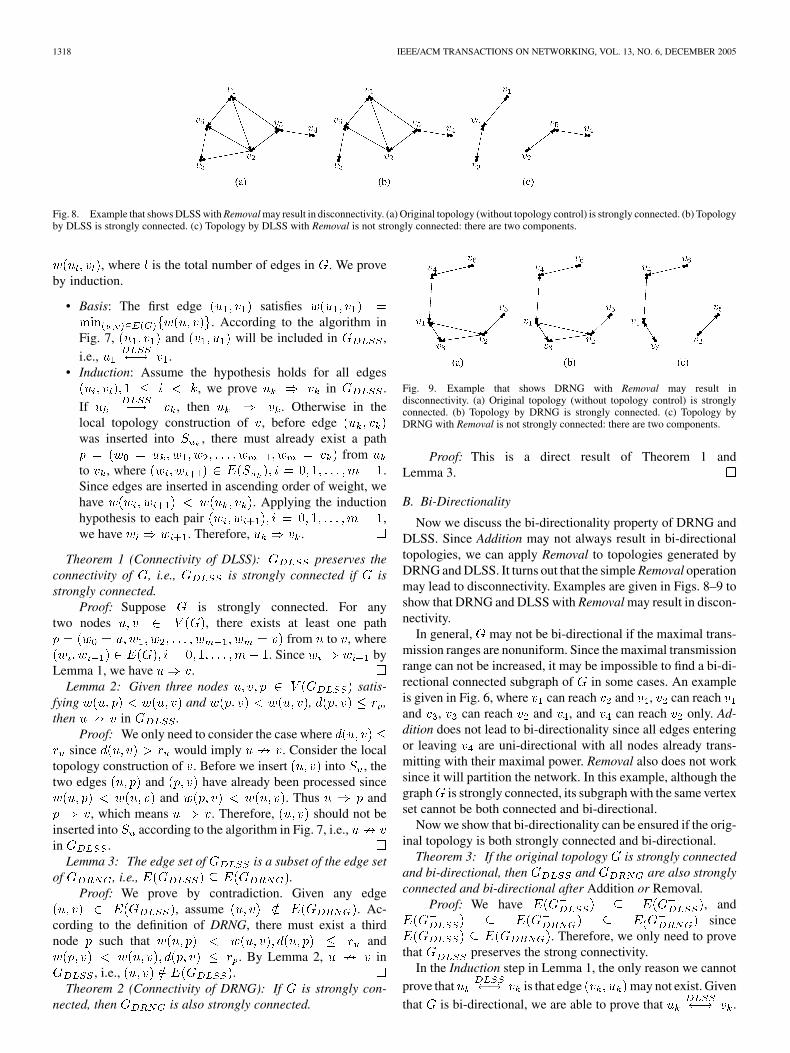
Fig. 8. Example that shows DLSS with Removal may result in disconnectivity. (a) Original topology (without topology control) is strongly connected. (b) Topologyby DLSS is strongly connected. (c) Topology by DLSS with Removal is not strongly connected: there are two components.
, where is the total number of edges in . We proveby induction.
• Basis: The first edge satisfies. According to the algorithm in
Fig. 7, and will be included in ,
i.e., .• Induction: Assume the hypothesis holds for all edges
, we prove in .
If , then . Otherwise in thelocal topology construction of , before edgewas inserted into , there must already exist a path
fromto , where .Since edges are inserted in ascending order of weight, wehave . Applying the inductionhypothesis to each pair ,we have . Therefore, .
Theorem 1 (Connectivity of DLSS): preserves theconnectivity of , i.e., is strongly connected if isstrongly connected.
Proof: Suppose is strongly connected. For anytwo nodes , there exists at least one path
from to , where. Since by
Lemma 1, we have .Lemma 2: Given three nodes satis-
fying and , ,then in .
Proof: We only need to consider the case wheresince would imply . Consider the local
topology construction of . Before we insert into , thetwo edges and have already been processed since
and . Thus and, which means . Therefore, should not be
inserted into according to the algorithm in Fig. 7, i.e.,in .
Lemma 3: The edge set of is a subset of the edge setof , i.e., .
Proof: We prove by contradiction. Given any edge, assume . Ac-
cording to the definition of DRNG, there must exist a thirdnode such that and
. By Lemma 2, in, i.e., .
Theorem 2 (Connectivity of DRNG): If is strongly con-nected, then is also strongly connected.
Fig. 9. Example that shows DRNG with Removal may result indisconnectivity. (a) Original topology (without topology control) is stronglyconnected. (b) Topology by DRNG is strongly connected. (c) Topology byDRNG with Removal is not strongly connected: there are two components.
Proof: This is a direct result of Theorem 1 andLemma 3.
B. Bi-Directionality
Now we discuss the bi-directionality property of DRNG andDLSS. Since Addition may not always result in bi-directionaltopologies, we can apply Removal to topologies generated byDRNG and DLSS. It turns out that the simple Removal operationmay lead to disconnectivity. Examples are given in Figs. 8–9 toshow that DRNG and DLSS with Removal may result in discon-nectivity.
In general, may not be bi-directional if the maximal trans-mission ranges are nonuniform. Since the maximal transmissionrange can not be increased, it may be impossible to find a bi-di-rectional connected subgraph of in some cases. An exampleis given in Fig. 6, where can reach and , can reachand , can reach and , and can reach only. Ad-dition does not lead to bi-directionality since all edges enteringor leaving are uni-directional with all nodes already trans-mitting with their maximal power. Removal also does not worksince it will partition the network. In this example, although thegraph is strongly connected, its subgraph with the same vertexset cannot be both connected and bi-directional.
Now we show that bi-directionality can be ensured if the orig-inal topology is both strongly connected and bi-directional.
Theorem 3: If the original topology is strongly connectedand bi-directional, then and are also stronglyconnected and bi-directional after Addition or Removal.
Proof: We have , andsince
. Therefore, we only need to provethat preserves the strong connectivity.
In the Induction step in Lemma 1, the only reason we cannotprove that is that edge may not exist. Giventhat is bi-directional, we are able to prove that .

LI AND HOU: LOCALIZED TOPOLOGY CONTROL ALGORITHMS FOR HETEROGENEOUS WIRELESS NETWORKS 1319
Fig. 10. The definition of Cone(u; �; v).
Hence for any edge , we have in .The removal of asymmetric edges in does not affect thisproperty. Therefore, is still strongly connected.
C. Degree Bound
In this section, we derive the bound on the node degree inthe topology by DRNG and DLSS. It has been observed thatany minimum spanning tree of a simple undirected graph inthe plane has a maximum out-degree of 6 [14]. However, thisbound does not hold for directed graphs. An example is shownin Fig. 11, where node has 18 out-neighbors.
Definition 15 (Disk): denotes a disk of radius ,centered at node .
Definition 16 (Cone): denotes an unboundedshaded region as shown in Fig. 10.
The following lemma is a direct result of the definition ofDRNG.
Lemma 4: Given three nodes satis-fying and , ,then in .
The following corollary is a direct result of Lemma 2 andLemma 4.
Corollary 1: If is an out-neighbor of in or, and , then can not have any other
out-neighbor inside .Theorem 4: For any node in or , the
number of out-neighbors that are inside is atmost 6.
Proof: Let be the set of out-neighbors of inor that are inside . Let the nodes
in be ordered such that for the th node and theth node ( ), . By Lemma 2 and
Lemma 4, we have (otherwise). Thus , i.e., node cannot reside inside
. Thus cannot have neighbors other thannode inside . By induction on the rank ofnodes in , the maximal number of out-neighbors thatcan have is at most 6.
Theorem 5 (Out-Degree Bound): The out-degree of any nodein or is bounded by a constant that dependsonly on and .
Proof: By Theorem 4, for any node inor , there are at most six out-neighbors inside
. And by Corollary 1, the set of disks
Fig. 11. An example that shows the out-degree in a heterogeneous networkcan be very large. The transmission range of u is r and the transmissionrange for all other nodes is r , where r = 2(r + �), � > 0. Allnodes are so arranged that the distance between any node and its closest neighboris r + �. Therefore, the only links in the network are those from u to allthe other nodes. Since relaying packets is impossible, u has to use its maximaltransmission power and keeps all 18 neighbors.
are disjoint. Therefore, the total number of out-neighbors ofis bounded by
where . In Fig. 11, the maximum out-degreeof is achieved if . Therefore, we can further tightenthe bound. Since the hexagonal area (as shown in Fig. 11) cen-tered at every neighbor of is disjoint with each other, the totalnumber of neighbors of is bounded by
Theorem 6 (In-Degree Bound): The in-degree of any node inor is bounded by 6.
Proof: Let be the set of in-neighbors of inor . Sort the nodes in such that for the
th node and the th node ( ), .By Lemma 2 and Lemma 4, we have(otherwise ). Thus , i.e., node cannotreside inside . Therefore, node cannot havein-neighbors other than node inside . Byinduction on the rank of nodes in , the maximal numberof in-neighbors that can have is at most six.
The bound given in Theorem 4 is the same for DRNG andDLSS, but the out-degree of the same node in is alwayssmaller than that in since .This bound is quite large since it describes the worst scenario.The average out-degree of nodes is actually not as large. In par-ticular, since , we have
1320 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 6, DECEMBER 2005
. Wewill also show in Section VII that the average maximum out-de-gree is far less than the bound for networks with randomly dis-tributed nodes.
Note that what has been discussed so far is the logical nodedegree, i.e., the number of logical neighbors. In practice, it ismore important to consider the physical node degree, i.e., thenumber of nodes within the transmission radius. If omni-di-rectional antennas are used, the physical degree cannot bebounded for an arbitrary topology. However, with the help ofdirectional antennas, we can bound the physical degree giventhat the logical degree is bounded under DLSS (except in someextreme cases, e.g., a large number of nodes are of the samedistance from one node). Essentially when transmitting to aspecific neighbor, node should adjust the direction and limitthe transmission power so that no other nodes will be affected.
D. Obtaining Visible Neighborhood inHeterogeneous Networks
Each node at least has to know the information of its visibleneighborhood to be able to preserve the network connectivity.As mentioned in Section V, to obtain in a heterogeneousnetwork, it is sometimes insufficient for each node to broad-cast its own position information to all the other nodes within
(Fig. 6). This problem is common to any distributed/local-ized topology control algorithm.
For a general heterogeneous network, there is no guaranteethat this problem can be solved locally. The only solution is foreach node to not only broadcast its own information to all theother nodes within , but also relay such messages from othernodes. Given that the original topology is strongly connected,each node will eventually obtain the information on its visibleneighborhood. This solution is, however, not localized.
Fortunately, the problem can still be solved locally for mostcases. Consider a subgraph of : , where
. Forany edge , since , wehave , which means is bi-directional. Gen-erally speaking, has fewer edges than does, and may notbe strongly connected even if is strongly connected. Unlessis only “barely” connected, which seldom occurs, is usuallystrongly connected.
Define ,, where since for any
, . Let and. By requiring each node to broadcast its posi-
tion and id to all other nodes within , we are able to determineand . We can then apply DRNG and DLSS to and
prove that Theorems 1–5 still hold if the original topology is .Theorem 7: Theorems 1, 2, 3, 4, 5, and 6 continue to hold if
the original topology is .Proof: We replace , , , , and with ,
, , and in the proof of Lemmas 1, 2, 3, and 4and Theorems 1, 2, 3, 4, 5, and 6. By following the same lineof arguments, we can prove that they still hold if the originaltopology is .
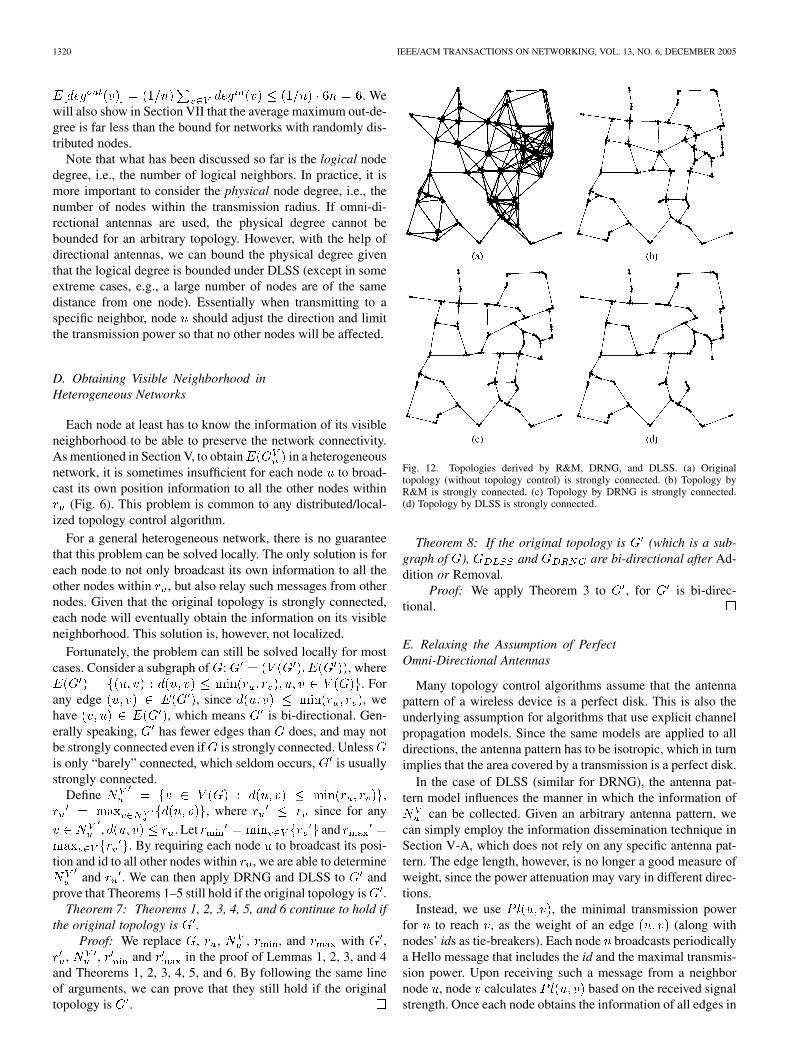
Fig. 12. Topologies derived by R&M, DRNG, and DLSS. (a) Originaltopology (without topology control) is strongly connected. (b) Topology byR&M is strongly connected. (c) Topology by DRNG is strongly connected.(d) Topology by DLSS is strongly connected.
Theorem 8: If the original topology is (which is a sub-graph of ), and are bi-directional after Ad-dition or Removal.
Proof: We apply Theorem 3 to , for is bi-direc-tional.
E. Relaxing the Assumption of PerfectOmni-Directional Antennas
Many topology control algorithms assume that the antennapattern of a wireless device is a perfect disk. This is also theunderlying assumption for algorithms that use explicit channelpropagation models. Since the same models are applied to alldirections, the antenna pattern has to be isotropic, which in turnimplies that the area covered by a transmission is a perfect disk.
In the case of DLSS (similar for DRNG), the antenna pat-tern model influences the manner in which the information of
can be collected. Given an arbitrary antenna pattern, wecan simply employ the information dissemination technique inSection V-A, which does not rely on any specific antenna pat-tern. The edge length, however, is no longer a good measure ofweight, since the power attenuation may vary in different direc-tions.
Instead, we use , the minimal transmission powerfor to reach , as the weight of an edge (along withnodes’ ids as tie-breakers). Each node broadcasts periodicallya Hello message that includes the id and the maximal transmis-sion power. Upon receiving such a message from a neighbornode , node calculates based on the received signalstrength. Once each node obtains the information of all edges in
LI AND HOU: LOCALIZED TOPOLOGY CONTROL ALGORITHMS FOR HETEROGENEOUS WIRELESS NETWORKS 1321
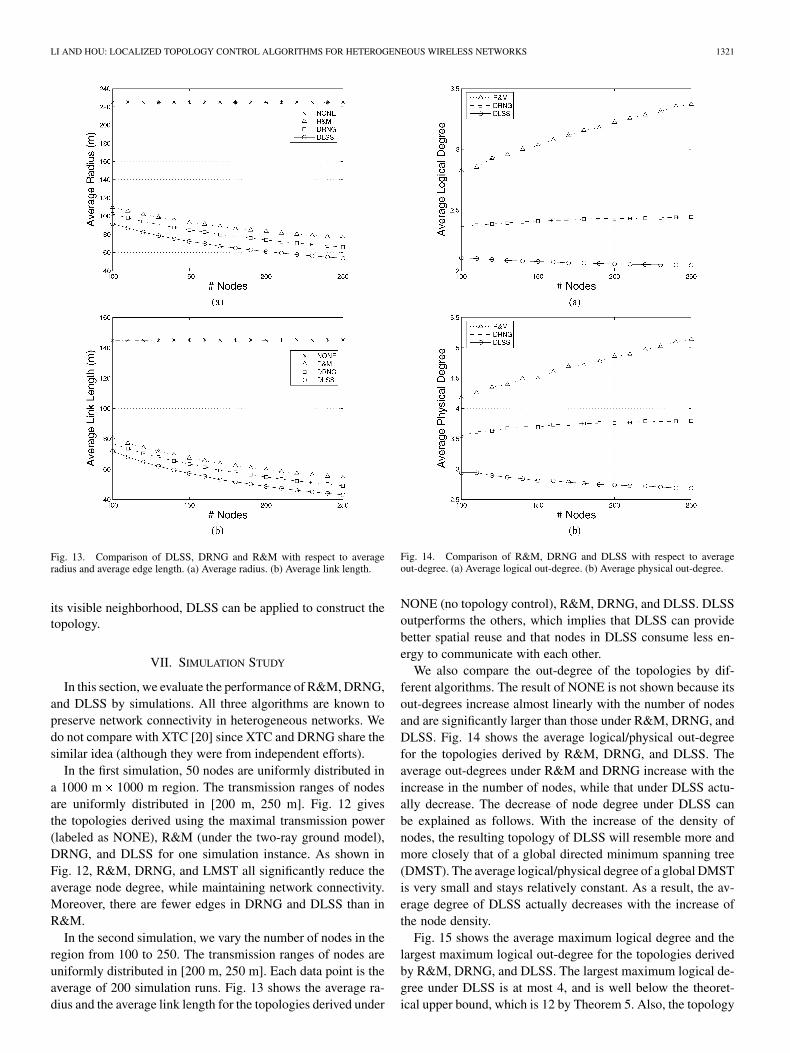
Fig. 13. Comparison of DLSS, DRNG and R&M with respect to averageradius and average edge length. (a) Average radius. (b) Average link length.
its visible neighborhood, DLSS can be applied to construct thetopology.
VII. SIMULATION STUDY
In this section, we evaluate the performance of R&M, DRNG,and DLSS by simulations. All three algorithms are known topreserve network connectivity in heterogeneous networks. Wedo not compare with XTC [20] since XTC and DRNG share thesimilar idea (although they were from independent efforts).
In the first simulation, 50 nodes are uniformly distributed ina 1000 m 1000 m region. The transmission ranges of nodesare uniformly distributed in [200 m, 250 m]. Fig. 12 givesthe topologies derived using the maximal transmission power(labeled as NONE), R&M (under the two-ray ground model),DRNG, and DLSS for one simulation instance. As shown inFig. 12, R&M, DRNG, and LMST all significantly reduce theaverage node degree, while maintaining network connectivity.Moreover, there are fewer edges in DRNG and DLSS than inR&M.
In the second simulation, we vary the number of nodes in theregion from 100 to 250. The transmission ranges of nodes areuniformly distributed in [200 m, 250 m]. Each data point is theaverage of 200 simulation runs. Fig. 13 shows the average ra-dius and the average link length for the topologies derived under
Fig. 14. Comparison of R&M, DRNG and DLSS with respect to averageout-degree. (a) Average logical out-degree. (b) Average physical out-degree.
NONE (no topology control), R&M, DRNG, and DLSS. DLSSoutperforms the others, which implies that DLSS can providebetter spatial reuse and that nodes in DLSS consume less en-ergy to communicate with each other.
We also compare the out-degree of the topologies by dif-ferent algorithms. The result of NONE is not shown because itsout-degrees increase almost linearly with the number of nodesand are significantly larger than those under R&M, DRNG, andDLSS. Fig. 14 shows the average logical/physical out-degreefor the topologies derived by R&M, DRNG, and DLSS. Theaverage out-degrees under R&M and DRNG increase with theincrease in the number of nodes, while that under DLSS actu-ally decrease. The decrease of node degree under DLSS canbe explained as follows. With the increase of the density ofnodes, the resulting topology of DLSS will resemble more andmore closely that of a global directed minimum spanning tree(DMST). The average logical/physical degree of a global DMSTis very small and stays relatively constant. As a result, the av-erage degree of DLSS actually decreases with the increase ofthe node density.
Fig. 15 shows the average maximum logical degree and thelargest maximum logical out-degree for the topologies derivedby R&M, DRNG, and DLSS. The largest maximum logical de-gree under DLSS is at most 4, and is well below the theoret-ical upper bound, which is 12 by Theorem 5. Also, the topology
1322 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 6, DECEMBER 2005
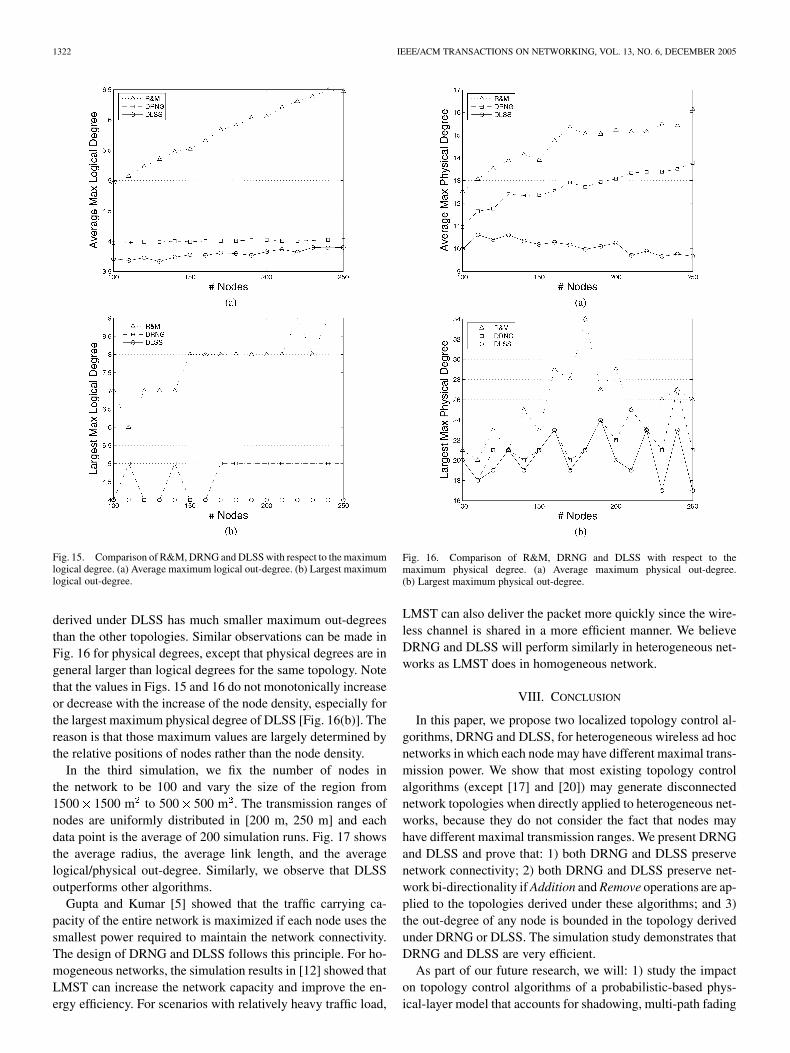
Fig. 15. Comparison of R&M, DRNG and DLSS with respect to the maximumlogical degree. (a) Average maximum logical out-degree. (b) Largest maximumlogical out-degree.
derived under DLSS has much smaller maximum out-degreesthan the other topologies. Similar observations can be made inFig. 16 for physical degrees, except that physical degrees are ingeneral larger than logical degrees for the same topology. Notethat the values in Figs. 15 and 16 do not monotonically increaseor decrease with the increase of the node density, especially forthe largest maximum physical degree of DLSS [Fig. 16(b)]. Thereason is that those maximum values are largely determined bythe relative positions of nodes rather than the node density.
In the third simulation, we fix the number of nodes inthe network to be 100 and vary the size of the region from1500 1500 m to 500 500 m . The transmission ranges ofnodes are uniformly distributed in [200 m, 250 m] and eachdata point is the average of 200 simulation runs. Fig. 17 showsthe average radius, the average link length, and the averagelogical/physical out-degree. Similarly, we observe that DLSSoutperforms other algorithms.
Gupta and Kumar [5] showed that the traffic carrying ca-pacity of the entire network is maximized if each node uses thesmallest power required to maintain the network connectivity.The design of DRNG and DLSS follows this principle. For ho-mogeneous networks, the simulation results in [12] showed thatLMST can increase the network capacity and improve the en-ergy efficiency. For scenarios with relatively heavy traffic load,
Fig. 16. Comparison of R&M, DRNG and DLSS with respect to themaximum physical degree. (a) Average maximum physical out-degree.(b) Largest maximum physical out-degree.
LMST can also deliver the packet more quickly since the wire-less channel is shared in a more efficient manner. We believeDRNG and DLSS will perform similarly in heterogeneous net-works as LMST does in homogeneous network.
VIII. CONCLUSION
In this paper, we propose two localized topology control al-gorithms, DRNG and DLSS, for heterogeneous wireless ad hocnetworks in which each node may have different maximal trans-mission power. We show that most existing topology controlalgorithms (except [17] and [20]) may generate disconnectednetwork topologies when directly applied to heterogeneous net-works, because they do not consider the fact that nodes mayhave different maximal transmission ranges. We present DRNGand DLSS and prove that: 1) both DRNG and DLSS preservenetwork connectivity; 2) both DRNG and DLSS preserve net-work bi-directionality if Addition and Remove operations are ap-plied to the topologies derived under these algorithms; and 3)the out-degree of any node is bounded in the topology derivedunder DRNG or DLSS. The simulation study demonstrates thatDRNG and DLSS are very efficient.
As part of our future research, we will: 1) study the impacton topology control algorithms of a probabilistic-based phys-ical-layer model that accounts for shadowing, multi-path fading

LI AND HOU: LOCALIZED TOPOLOGY CONTROL ALGORITHMS FOR HETEROGENEOUS WIRELESS NETWORKS 1323
Fig. 17. Comparison of R&M, DRNG and DLSS under different region sizes. (a) Average radius. (b) Average link length. (c) Average logical out-degree.(d) Average physical out-degree.
and directional antennas, and 2) jointly consider topology andMAC control and study how the MAC-level interference affectsnetwork connectivity and bi-directionality.
ACKNOWLEDGMENT
The authors would like to thank the anonymous reviewers andthe editor for their insightful comments.
REFERENCES
[1] F. Bock, “An algorithm to construct a minimum spanning tree in a di-rected network,” in Developments in Operations Research. New York:Gordon and Breach, 1971, pp. 29–44.
[2] S. A. Borbash and E. H. Jennings, “Distributed topology control algo-rithm for multihop wireless networks,” in Proc. Int. Joint Conf. NeuralNetworks (IJCNN ’02), Honolulu, HI, May 2002, pp. 355–360.
[3] Y. J. Chu and T. H. Liu, “On the shortest arborescence of a directedgraph,” Science Sinica, vol. 14, pp. 1396–1400, 1965.
[4] J. Edmonds, “Optimum branchings,” J. Res. Nat. Bureau of Standards,vol. 71B, pp. 233–240, 1967.
[5] P. Gupta and P. R. Kumar, “The capacity of wireless networks,” IEEETrans. Inf. Theory, vol. 46, no. 2, pp. 388–404, Mar. 2000.
[6] T. He, C. Huang, B. M. Blum, J. A. Stankovic, and T. Abdelzaher,“Range-free localization schemes for large scale sensor networks,” inProc. 9th ACM Int. Conf. Mobile Computing and Networking (MO-BICOM), San Diego, CA, Sep. 2003, pp. 81–95.
[7] C. E. Jones, K. M. Sivalingam, P. Agrawal, and J. C. Chen, “A surveyof energy efficient network protocols for wireless networks,” WirelessNetw., vol. 7, no. 4, pp. 343–358, Aug. 2001.
[8] V. Kawadia and P. Kumar, “Power control and clustering in ad hoc net-works,” in Proc. IEEE INFOCOM, vol. 1, San Francisco, CA, Apr. 2003,pp. 459–469.
[9] L. Li, J. Y. Halpern, P. Bahl, Y.-M. Wang, and R. Wattenhofer, “Anal-ysis of a cone-based distributed topology control algorithm for wire-less multi-hop networks,” in Proc. ACM Symp. Principles of DistributedComputing (PODC), Newport, RI, Aug. 2001, pp. 264–273.
[10] N. Li and J. C. Hou, “Topology control in heterogeneous wireless net-works: Problems and solutions,” in Proc. IEEE INFOCOM, Hong Kong,Mar. 2004, pp. 232–243.
[11] N. Li, J. C. Hou, and L. Sha, “Design and analysis of an MST-basedtopology control algorithm,” in Proc. IEEE INFOCOM, vol. 3, San Fran-cisco, CA, Apr. 2003, pp. 1702–1712.
[12] , “Design and analysis of an MST-based topology control algo-rithm,” IEEE Trans. Wireless Commun., vol. 4, no. 3, pp. 1195–1206,May 2005.
[13] X.-Y. Li, G. Calinescu, and P.-J. Wan, “Distributed construction of planarspanner and routing for ad hoc networks,” in Proc. IEEE INFOCOM,vol. 3, New York, NY, Jun. 2002, pp. 1268–1277.
[14] C. Monma and S. Suri, “Transitions in geometric minimum spanningtrees,” in Proc. ACM Symp. Computational Geometry, North Conway,NH, 1991, pp. 239–249.
[15] S. Narayanaswamy, V. Kawadia, R. S. Sreenivas, and P. R. Kumar,“Power control in ad-hoc networks: Theory, architecture, algorithmand implementation of the COMPOW protocol,” in Proc. Eur. Wireless2002, Next Generation Wireless Networks: Technologies, Protocols,Services and Applications, Florence, Italy, Feb. 2002, pp. 156–162.
[16] R. Ramanathan and R. Rosales-Hain, “Topology control of multihopwireless networks using transmit power adjustment,” in Proc. IEEE IN-FOCOM, vol. 2, Tel Aviv, Israel, Mar. 2000, pp. 404–413.
[17] V. Rodoplu and T. H. Meng, “Minimum energy mobile wireless net-works,” IEEE J. Sel. Areas Commun., vol. 17, no. 8, pp. 1333–1344,Aug. 1999.

1324 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 6, DECEMBER 2005
[18] K. J. Supowit, “The relative neighborhood graph, with an applicationto minimum spanning trees,” J. ACM, vol. 30, no. 3, pp. 428–448, Jul.1983.
[19] G. T. Toussaint, “The relative neighborhood graph of a finite planar set,”Pattern Recognit., vol. 12, pp. 261–268, 1980.
[20] R. Wattenhofer and A. Zollinger, “XTC: A practical topology control al-gorithm for ad-hoc networks,” in Proc. 18th Int. Parallel and DistributedProcessing Symp. (IPDPS’04), Santa Fe, New Mexico, Apr. 2004, pp.216–223.
Ning Li (S’04) received the B.E. and M.E. degreesfrom Tsinghua University, Beijing, China, in 1998and 1999, respectively, the M.S. degree from TheOhio State University, Columbus, in 2001, andthe Ph.D. degree from the University of Illinois atUrbana-Champaign in 2005.
His research interests include design and analysisof wireless mobile ad hoc networks and sensornetworks, large-scale network simulation and emu-lation, and distributed and mobile computing.
Dr. Li has been a member of the ACM since 2004.
Jennifer C. Hou (SM’99) received the Ph.D. degreefrom The University of Michigan, Ann Arbor, in1993.
She is currently a Professor in the Department ofComputer Science, University of Illinois at Urbana-Champaign. She has been supervising several fed-erally and industry funded projects in the areas ofnetwork modeling and simualtion, network measure-ment and diagnostics, enabling communication soft-ware for assisted living, and the theoretical and pro-tocol design aspects of wireless sensor networks. She
has published (with her former advisor, students, and colleagues) over 125 pa-pers and book chapters in archived journals and peer-reviewed conferences, andreleased a truly extensible, reusable, component-based, compositional networksimulation and emulation package called J-Sim.
Dr. Hou has been a member of the ACM since 1993. She was a recipientof an ACM Recognition of Service Award in 2004, a Lumley ResearchAward from The Ohio State University in 2001, a NSF CAREER award in1996–2000, and a Women in Science Initiative Award from The Universityof Wisconsin–Madison in 1993–1995. She serves on the editorial boards ofIEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, IEEE TRANSACTIONS
ON PARALLEL AND DISTRIBUTED SYSTEMS, IEEE Wireless CommunicationMagazine, ACM/Kluwer Wireless Networks, Kluwer Computer Networks, andACM Transactions on Sensor Networks. She has also served on the TechnicalProgram Committee of several major networking, real-time, and distributedsystems conferences/symposiums, including IEEE INFOCOM, IEEE ICNP,IEEE ICDCS, IEEE RTSS, IEEE ICC, IEEE Globecom, ACM Mobicom,and ACM Sigmetrics. She is the Technical Program Co-chair of 27th IEEEINFOCOM 2008, First International Wireless Internet Conference 2005,ACM 3rd Information Processing in Sensor Networks (IPSN 2004), and IEEEReal-time Technology and Application Symposium (RTAS 2000).