LÊ TIÊN PHONG LUẬN ÁN TIẾN SĨ KỸ THUẬT - TNUT
183
BỘ GIÁO DỤC VÀ ĐÀO TẠO ĐẠI HỌC THÁI NGUYÊN LÊ TIÊN PHONG NGHIÊN CỨU MỘT SỐ PHƯƠNG PHÁP NÂNG CAO HIỆU QUẢ KHAI THÁC NGUỒN PIN MẶT TRỜI LUẬN ÁN TIẾN SĨ KỸ THUẬT THÁI NGUYÊN – NĂM 2017
-
Upload
khangminh22 -
Category
Documents
-
view
17 -
download
0
Transcript of LÊ TIÊN PHONG LUẬN ÁN TIẾN SĨ KỸ THUẬT - TNUT
BỘ GIÁO DỤC VÀ ĐÀO TẠO ĐẠI HỌC THÁI NGUYÊN
LÊ TIÊN PHONG
NGHIÊN CỨU MỘT SỐ PHƯƠNG PHÁP
NÂNG CAO HIỆU QUẢ KHAI THÁC NGUỒN PIN MẶT TRỜI
LUẬN ÁN TIẾN SĨ KỸ THUẬT
THÁI NGUYÊN – NĂM 2017
B0 crAo DUC vA DAo rAo,
DAI HOC THAI NGTryENa a
lf, rrtN PHoNG
NGHrfll.I cuU Mgr s6 Pnrloxc PSAP
nAnc cAo HrSu quA KIrAr rnAc xcuox PrN h,tlT TRor
Chuy0n nginh: Ki thu$t Aidu mi6n vi Tg tlQng h6a
Mn s6 z 62.52.02.16
LUaN AN ilnN Si Kv rHUaT
NGTIOT HUofc DAN KHoA HQC:
1. PGS.TS. Nguy6n VIn Li6n |W2. PGS.TS. Ngd Dftc Minh N
THAI NCUTSN-NAM zlfi

i
LỜI CAM ĐOAN
Tôi xin cam đoan rằng bản luận án này là thành quả nghiên cứu của bản thân
tôi dưới sự hướng dẫn của PGS.TS. Nguyễn Văn Liễn – Viện Điện, Trường Đại học
Bách Khoa Hà Nội, PGS.TS. Ngô Đức Minh – Khoa Điện, trường Đại học Kỹ thuật
Công Nghiệp, Đại học Thái Nguyên và tập thể các nhà khoa học khoa Điện trường
Đại học Kỹ thuật Công nghiệp, Đại học Thái Nguyên. Kết quả nghiên cứu của luận
án là trung thực và chưa được công bố trên bất cứ một công trình nào khác.
Thái Nguyên, ngày tháng năm 2017
Tác giả luận án
Lê Tiên Phong
-ii-
LỜI CẢM ƠN
Đầu tiên, tôi xin bày tỏ lời cảm ơn sâu sắc đến hai thầy hướng dẫn khoa học
trực tiếp, PGS.TS. Nguyễn Văn Liễn và PGS.TS. Ngô Đức Minh đã trực tiếp hướng
dẫn, định hướng khoa học trong quá trình nghiên cứu. Tôi cũng xin được gửi lời
cảm ơn chân thành và kính trọng đến tập thể các nhà khoa học khoa Điện, trường
Đại học Kỹ thuật Công nghiệp, Đại học Thái Nguyên, các bạn bè đồng nghiệp đã
đóng góp những ý kiến quý báu về chuyên môn trong suốt thời gian thực hiện luận
án.
Tác giả luận án xin trân trọng cảm ơn Ban giám hiệu, Phòng Đào tạo, Ban chủ
nhiệm khoa Điện, Trường Đại học Kỹ thuật Công nghiệp, Đại học Thái Nguyên đã
tạo điều kiện thuận lợi nhất cho nghiên cứu sinh trong suốt quá trình học tập và
nghiên cứu.
Cuối cùng, tôi cũng muốn nói lời cảm ơn sâu sắc đến bố mẹ, anh chị, vợ và
các con đã luôn bên tôi, hết lòng quan tâm, sẻ chia, ủng hộ, động viên tinh thần, tạo
điều kiện giúp tôi có nghị lực vượt qua những giai đoạn khó khăn nhất, vất vả nhất
để hoàn thành luận án này.
Tác giả luận án
Lê Tiên Phong

-iii-
MỤC LỤC KÝ HIỆU VIẾT TẮT .......................................................................................................... vii
KÝ HIỆU .............................................................................................................................. ix
DANH MỤC CÁC HÌNH VẼ ............................................................................................. xii
DANH MỤC CÁC BẢNG .................................................................................................. xv
MỞ ĐẦU ............................................................................................................................... 1
CHƯƠNG 1 ........................................................................................................................... 5
TỔNG QUAN VẤN ĐỀ NGHIÊN CỨU .............................................................................. 5
1.1 Khái quát về nguồn pin mặt trời ................................................................................... 5
1.2 Cấu trúc chung của hệ thống khai thác nguồn pin mặt trời .......................................... 6
1.3 Tình hình nghiên cứu trên thế giới và trong nước về pin mặt trời ............................... 7
1.3.1 Tình hình nghiên cứu trên thế giới ......................................................................... 7
1.3.2 Tình hình nghiên cứu trong nước ......................................................................... 11
1.4 Một số vấn đề còn tồn tại và đề xuất hướng giải quyết .............................................. 12
1.4.1 Một số vấn đề còn tồn tại ..................................................................................... 12
1.4.2 Tiếp cận vấn đề .................................................................................................... 15
1.4.3 Đề xuất hướng giải quyết ..................................................................................... 16
1.5 Kết luận chương 1 ...................................................................................................... 17
CHƯƠNG 2 ......................................................................................................................... 19
MÔ HÌNH HÓA ĐẦY ĐỦ VÀ NHẬN DẠNG CHÍNH XÁC ĐIỂM CÔNG SUẤT CỰC
ĐẠI CHO NGUỒN PIN MẶT TRỜI .................................................................................. 19
2.1 Mô hình toán học của nguồn pin mặt trời .................................................................. 19
2.2 Xây dựng giải pháp nhận dạng các thông số ẩn cho nguồn pin mặt trời ở điều kiện
vận hành tiêu chuẩn .......................................................................................................... 23
2.2.1 Nêu vấn đề ............................................................................................................ 23
2.2.2 Thiết lập các phương trình tại các điểm đặc biệt ở điều kiện tiêu chuẩn ............. 24
2.2.3 Phương pháp xác định các thông số ẩn ................................................................ 26
2.2.4 Xây dựng thuật toán xác định các thông số ẩn ..................................................... 27
-iv-
2.2.5 Áp dụng xác định thông số ẩn cho một số loại pin quang điện ........................... 29
2.3 Giải pháp mới nhận dạng chính xác điểm công suất cực đại cho nguồn pin mặt trời 31
2.3.1 Nội dung giải pháp đề xuất .................................................................................. 31
2.3.2 Đánh giá tính chính xác của giải pháp đề xuất..................................................... 34
2.4 Mô hình hóa đầy đủ cho nguồn pin mặt trời .............................................................. 35
2.4.1 Quy đổi giá trị các thông số từ điều kiện vận hành tiêu chuẩn về điều kiện vận
hành bất kỳ .................................................................................................................... 35
2.4.2 Xây dựng mới hàm số n(T) .................................................................................. 38
2.4.3 Mô hình hóa đầy đủ cho nguồn pin mặt trời ........................................................ 43
2.5 Kết luận chương 2 ...................................................................................................... 44
CHƯƠNG 3 ......................................................................................................................... 45
THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN NGUỒN PIN MẶT TRỜI THEO MÔ HÌNH ĐẦY
ĐỦ ........................................................................................................................................ 45
3.1 Cấu trúc điều khiển hệ thống ...................................................................................... 45
3.2 Cơ sở lý thuyết điều khiển và mô tả toán học các bộ biến đổi ................................... 47
3.2.1 Cơ sở lý thuyết điều khiển ................................................................................... 47
3.2.1.1 Kỹ thuật điều khiển trượt trong các bộ biến đổi DC/DC ............................... 47
3.2.1.2 Kỹ thuật điều khiển điện áp trung bình .......................................................... 50
3.2.2 Mô tả toán học bộ biến đổi DC/DC buck ............................................................. 51
3.2.2.1 Bộ biến đổi DC/DC buck ............................................................................... 51
3.2.2.2 Bộ biến đổi DC/DC boost .............................................................................. 52
3.3 Điều khiển khai thác điểm công suất cực đại của nguồn pin mặt trời theo mô hình
đầy đủ ở điều kiện vận hành bất kỳ .................................................................................. 54
3.3.1 Phương pháp IB-SMC .......................................................................................... 54
3.3.1.1 Nguyên lý chung của phương pháp IB-SMC ................................................ 54
3.3.1.2 Phương pháp IB-SMC cho BBĐ DC/DC buck ............................................. 55
3.3.1.3 Phương pháp IB-SMC cho BBĐ DC/DC boost ............................................ 58
3.3.1.4 Chiến lược điều khiển BBĐ DC/DC theo phương pháp IB-SMC ................. 60
-v-
3.3.1.5 Mô phỏng đánh giá phương pháp IB-SMC ................................................... 62
3.3.2 Phương pháp IB-AVC .......................................................................................... 69
3.3.2.1 Nguyên lý chung của phương pháp IB-AVC ................................................ 69
3.3.2.2 Phương pháp IB-AVC cho BBĐ DC/DC buck ............................................. 71
3.3.2.3 Phương pháp IB-AVC cho BBĐ DC/DC boost ............................................ 73
3.3.2.4 Chiến lược điều khiển BBĐ DC/DC theo phương pháp IB-AVC ................. 75
3.3.2.5 Kết quả mô phỏng phương pháp IB-AVC ..................................................... 77
3.3.3 So sánh hiệu quả năng lượng và khả năng ứng dụng ........................................... 81
3.4 Điều khiển ghép nối lưới cho nguồn pin mặt trời ...................................................... 86
3.4.1 Cấu trúc điều khiển ghép nối lưới ........................................................................ 86
3.4.2 Mô phỏng hệ thống điều khiển ghép nối lưới cho nguồn pin mặt trời ................. 87
3.5 Kết luận chương 3 ...................................................................................................... 97
CHƯƠNG 4 ......................................................................................................................... 99
KIỂM CHỨNG KẾT QUẢ NGHIÊN CỨU TRÊN MÔ HÌNH THIẾT BỊ THỰC ............ 99
4.1 Xây dựng mô hình cấu trúc thiết bị thực .................................................................... 99
4.2 Các thiết bị chính ...................................................................................................... 101
4.2.1 Cảm biến đo công suất của bức xạ mặt trời ....................................................... 101
4.2.2 Cảm biến đo nhiệt độ ......................................................................................... 102
4.2.3 Ắc quy ................................................................................................................ 102
4.2.4 Sơ đồ đấu nối mạch lực và điều khiển ............................................................... 102
4.2.5 Lắp đặt các thiết bị và cài đặt ............................................................................. 105
4.3 Phương thức vận hành mô hình thiết bị thực ........................................................... 106
4.4 Kết quả thực nghiệm................................................................................................. 109
4.4.1 Kiểm chứng tính chính xác của giải pháp đã đề xuất ........................................ 109
4.4.2 Đánh giá hiệu quả năng lượng của giải pháp đã đề xuất .................................... 110
4.5 Kết luận chương 4 .................................................................................................... 115
KẾT LUẬN VÀ KIẾN NGHỊ ........................................................................................... 117
-vi-
DANH MỤC CÔNG TRÌNH KHOA HỌC CÓ LIÊN QUAN ĐẾN LUẬN ÁN ĐÃ CÔNG
BỐ ...................................................................................................................................... 119
TÀI LIỆU THAM KHẢO ................................................................................................. 120
PHỤ LỤC .......................................................................................................................... 132
-vii-
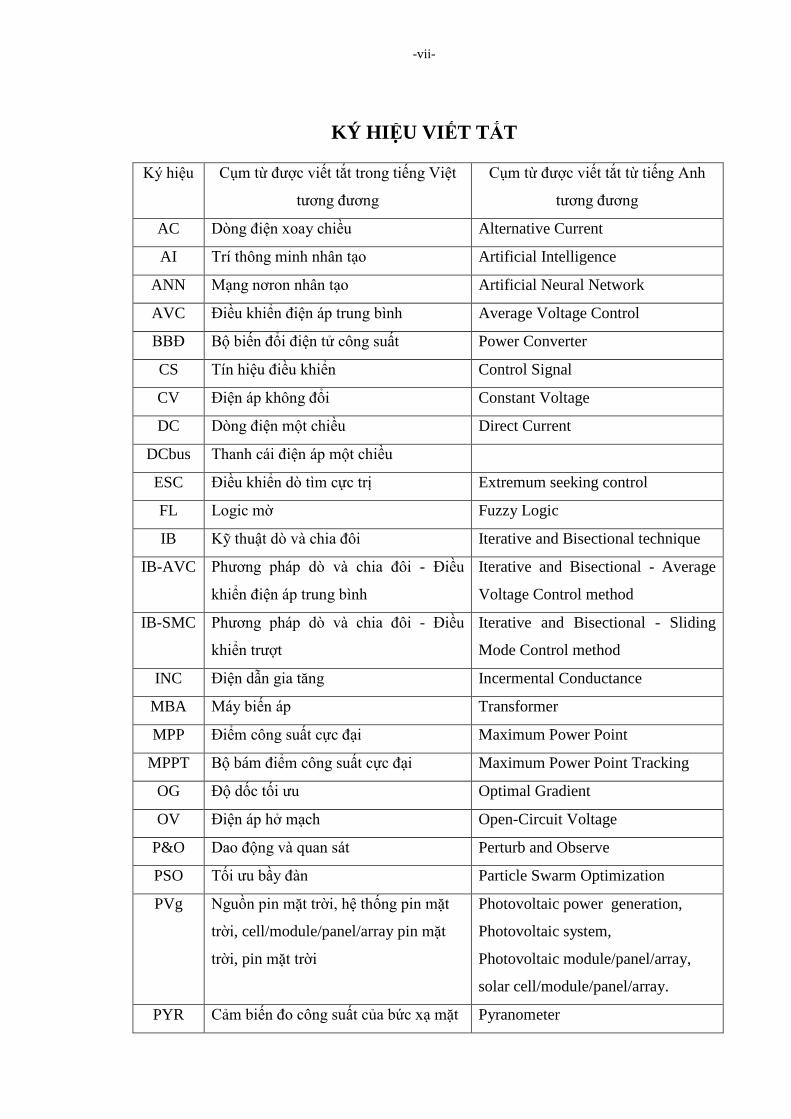
KÝ HIỆU VIẾT TẮT
Ký hiệu Cụm từ được viết tắt trong tiếng Việt
tương đương
Cụm từ được viết tắt từ tiếng Anh
tương đương
AC Dòng điện xoay chiều Alternative Current
AI Trí thông minh nhân tạo Artificial Intelligence
ANN Mạng nơron nhân tạo Artificial Neural Network
AVC Điều khiển điện áp trung bình Average Voltage Control
BBĐ Bộ biến đổi điện tử công suất Power Converter
CS Tín hiệu điều khiển Control Signal
CV Điện áp không đổi Constant Voltage
DC Dòng điện một chiều Direct Current
DCbus Thanh cái điện áp một chiều
ESC Điều khiển dò tìm cực trị Extremum seeking control
FL Logic mờ Fuzzy Logic
IB Kỹ thuật dò và chia đôi Iterative and Bisectional technique
IB-AVC Phương pháp dò và chia đôi - Điều
khiển điện áp trung bình
Iterative and Bisectional - Average
Voltage Control method
IB-SMC Phương pháp dò và chia đôi - Điều
khiển trượt
Iterative and Bisectional - Sliding
Mode Control method
INC Điện dẫn gia tăng Incermental Conductance
MBA Máy biến áp Transformer
MPP Điểm công suất cực đại Maximum Power Point
MPPT Bộ bám điểm công suất cực đại Maximum Power Point Tracking
OG Độ dốc tối ưu Optimal Gradient
OV Điện áp hở mạch Open-Circuit Voltage
P&O Dao động và quan sát Perturb and Observe
PSO Tối ưu bầy đàn Particle Swarm Optimization
PVg Nguồn pin mặt trời, hệ thống pin mặt
trời, cell/module/panel/array pin mặt
trời, pin mặt trời
Photovoltaic power generation,
Photovoltaic system,
Photovoltaic module/panel/array,
solar cell/module/panel/array.
PYR Cảm biến đo công suất của bức xạ mặt Pyranometer
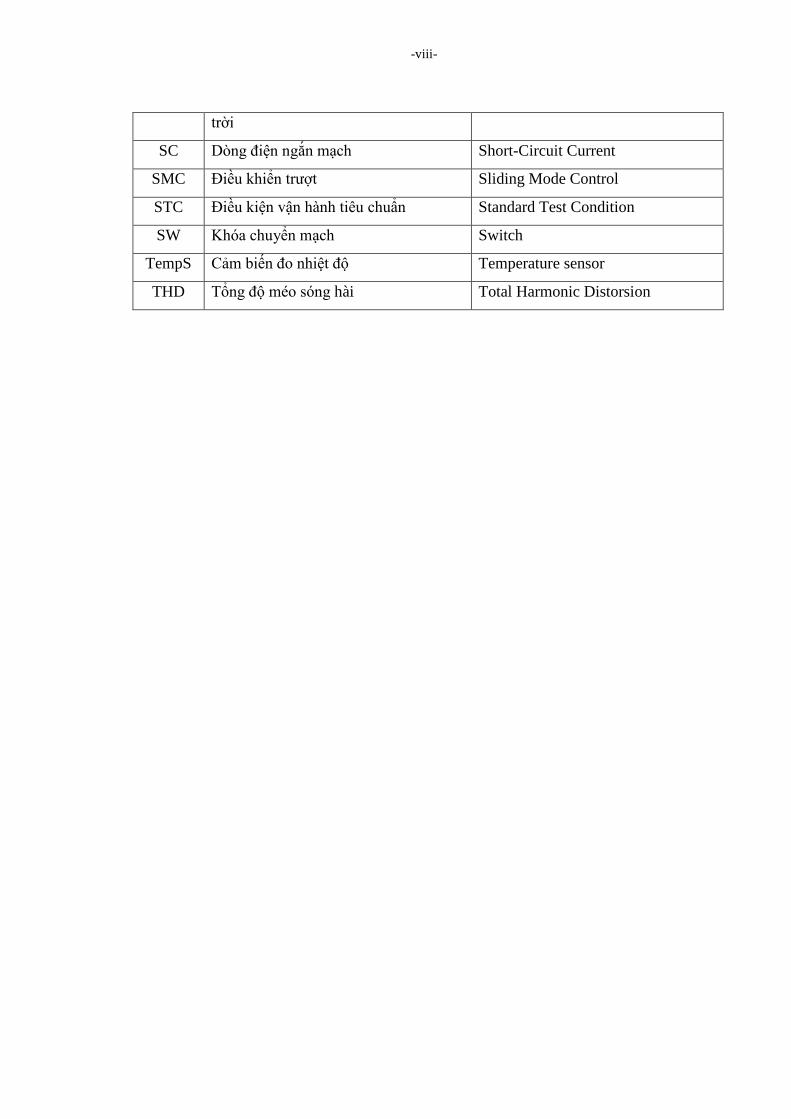
-viii-
trời
SC Dòng điện ngắn mạch Short-Circuit Current
SMC Điều khiển trượt Sliding Mode Control
STC Điều kiện vận hành tiêu chuẩn Standard Test Condition
SW Khóa chuyển mạch Switch
TempS Cảm biến đo nhiệt độ Temperature sensor
THD Tổng độ méo sóng hài Total Harmonic Distorsion

-ix-
KÝ HIỆU
Ký hiệu Đơn vị Ý nghĩa
C F Điện dung
CTI %/0C hoặc mA/0C Hệ số thay đổi của dòng điện theo nhiệt độ
CTP %/0C Hệ số thay đổi của Pmpp theo nhiệt độ
CTV %/0C hoặc mV/0C Hệ số thay đổi của điện áp theo nhiệt độ
D, d Hệ số điều chế độ rộng xung trung bình hoặc tức thời
fS kHz Tần số phát xung
G W/m2 Công suất của bức xạ mặt trời
g 1/Ω Điện dẫn tải của PVg
I01, I0 A Dòng quang điện bão hòa
Id1, Id A Dòng điện chạy qua diode của PVg
ig A Dòng điện các pha tức thời tại điểm liên kết với lưới
Ig A Biên độ dòng điện các pha tại điểm liên kết với lưới
IL, iL A Dòng điện trung bình hoặc tức thời qua cuộn cảm BBĐ
Impp A Dòng điện tại MPP
Ip1, Ip A Dòng điện chạy qua điện trở song song của PVg
Iph1, Iph A Dòng quang điện phát ra của PVg
ipv1, ipv,
Ipv
A Dòng điện tức thời hoặc trung bình phát ra từ PVg
ISC1, ISC A Dòng điện ngắn mạch của PVg
k eV/K Hằng số Boltzmann
Ka W/A Đánh giá độ trượt của công suất theo dòng điện và có ảnh
hưởng đến dải trễ của đường đặc tính công suất
Kb Đặc trưng cho dải trễ của điện áp phát ra từ PVg,
Kc V/A Đánh giá độ trượt của điện áp theo dòng điện
kVmppDC Hệ số tương quan về dòng điện tại MPP so với ISC

-x-
kVmppOV Hệ số tương quan về điện áp tại MPP so với VOC
L H Điện cảm
n Hệ số đặc trưng của diode
Np Số lượng đơn vị ghép song song của PVg
NS Số lượng đơn vị ghép nối tiếp của PVg
Pdc kW Công suất trên DCbus
Pinv kW Công suất tác dụng ở phía AC của BBĐ DC/AC
Pmpp W, kW Công suất tại MPP
q C Điện tích của electron
Qinv kVA Công suất phản kháng ở phía AC của BBĐ DC/AC
Rdc, R Ω Điện trở cuộn cảm phía DCbus và điện trở phía AC của
BBĐ DC/AC
Req Ω Điện trở tương đương của PVg
Rp1, Rp Ω Điện trở song song của PVg
RS1, RS Ω Điện trở nối tiếp của PVg
T 0C hoặc 0K Nhiệt độ lớp tiếp giáp p-n
Tamb 0C hoặc 0K Nhiệt độ môi trường
Ti s Hằng số thời gian của khâu lọc tín hiệu đo dòng điện
TS s Chu kỳ phát xung
Tv s Hằng số thời gian của khâu lọc tín hiệu đo điện áp
Ug V Biên độ điện áp pha của lưới điện
ug V Điện áp pha tức thời tại điểm liên kết với lưới điện
Ug V Biên độ điện áp tại điểm liên kết với lưới điện
uinv V Điện áp pha tức thời ở đầu ra BBĐ DC/AC
ueq,
ueqref
Tín hiệu điều khiển tương đương
Vdc, vdc V Điện áp trung bình hoặc tức thời trên DCbus
-xi-
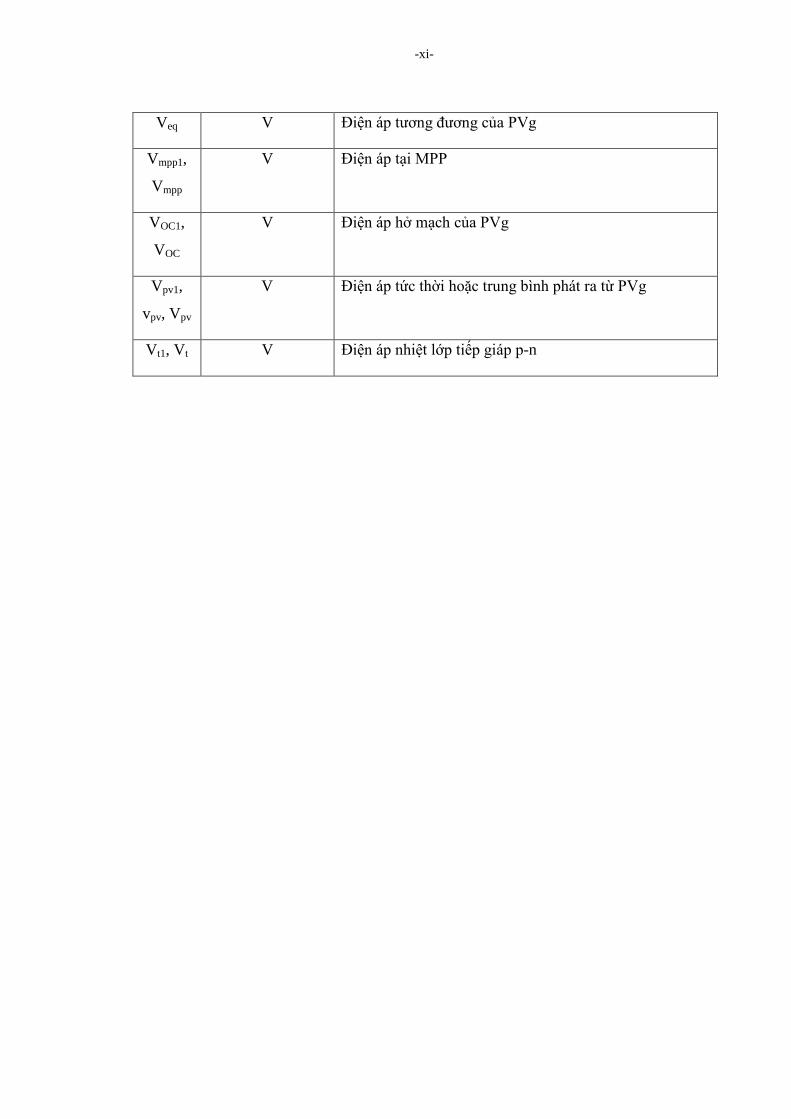
Veq V Điện áp tương đương của PVg
Vmpp1,
Vmpp
V Điện áp tại MPP
VOC1,
VOC
V Điện áp hở mạch của PVg
Vpv1,
vpv, Vpv
V Điện áp tức thời hoặc trung bình phát ra từ PVg
Vt1, Vt V Điện áp nhiệt lớp tiếp giáp p-n

-xii-
DANH MỤC CÁC HÌNH VẼ
Hình 1. 1 Phương pháp tổ hợp PVg ....................................................................................... 6
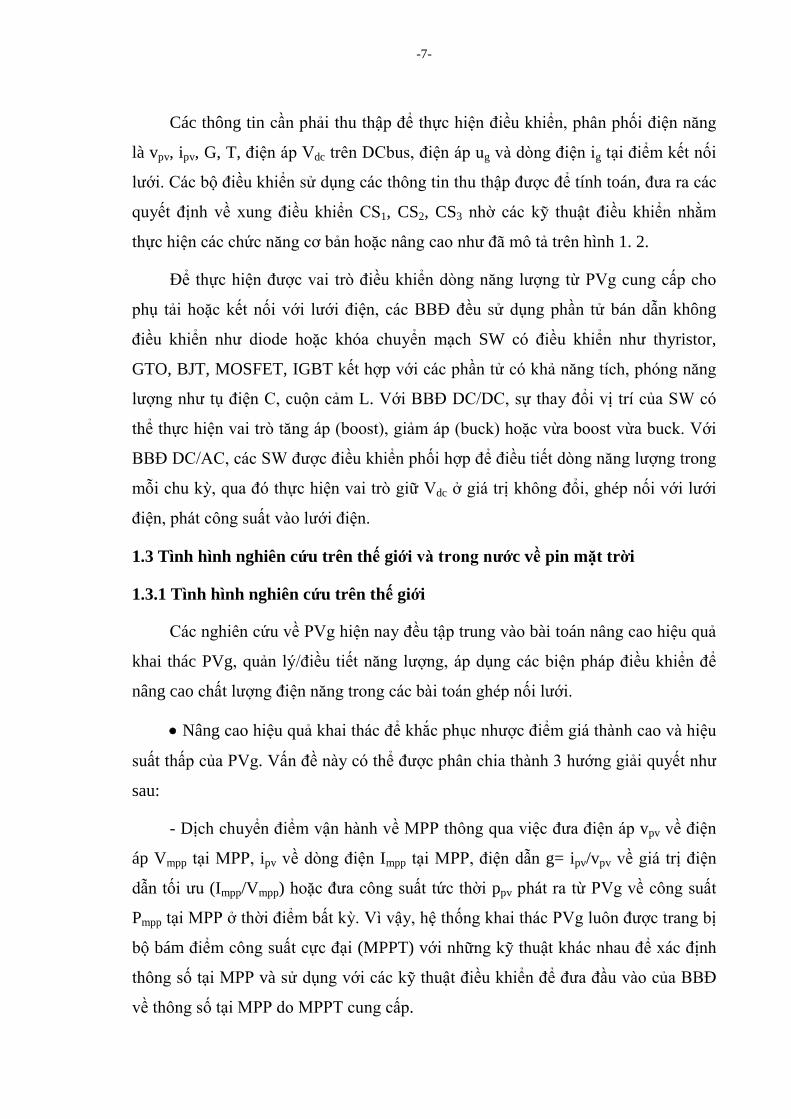
Hình 1. 2 Cấu trúc chung của hệ thống khai thác PVg .......................................................... 6
Hình 1. 3 Phân loại kỹ thuật tìm MPP ................................................................................. 14
Hình 2. 1 Sơ đồ mạch tương đương mỗi cell của PVg ........................................................ 19
Hình 2. 2 Đường đặc tính vpv-ipv và vpv-ppv trên mặt phẳng v-i, v-p ................................... 20
Hình 2. 3 Đường đặc tính vpv-ipv của tổ hợp NS cell nối tiếp hoặc Np cell song song ......... 22
Hình 2. 4 Độ dốc đường tiếp tuyến tại điểm ngắn mạch của đường đặc tính vpv-ipv ........... 24
Hình 2. 5 Phương pháp Newton-Raphson .......................................................................... 26
Hình 2. 6 Thuật toán Newton-Raphson xác định thông số ẩn của PVg .............................. 29
Hình 2. 7 Thuật toán xác định cặp giá trị tương ứng giữa vpv(i) với ipv
(i) ............................. 32
Hình 2. 8 Trạng thái dịch chuyển của các điểm kế tiếp nhau .............................................. 32
Hình 2. 9 Quá trình dò tìm MPP trên đường đặc tính vpv-ppv .............................................. 33
Hình 2. 10 Thuật toán IB tìm MPP ...................................................................................... 34
Hình 2. 11 Thuật toán kiểm tra hệ phương trình mô tả PVg ............................................... 36
Hình 2. 12 Đường cong mô tả các số liệu rời rạc ................................................................ 38
Hình 2. 13 Đường cong mô tả hàm số n(T) ứng với MF165EB3 và SV-55 ....................... 40
Hình 2. 14 Đồ thị VOC, ISC, Pmpp tính toán được của MF165EB3 ........................................ 41
Hình 2. 15 Đồ thị VOC, ISC, Pmpp tính toán được của SV-55 ................................................ 41
Hình 2. 16 Đường đặc tính vpv-ipv, vpv-ppv tương ứng với MF165EB3 ............................... 42
Hình 2. 17 Đường đặc tính vpv-ipv, vpv-ppv tương ứng với SV-55 ........................................ 42
Hình 2. 18 Mô hình hóa đầy đủ PVg ................................................................................... 43
Hình 3. 1 Sơ đồ cấu trúc điều khiển hệ thống khai thác PVg theo mô hình đầy đủ ............ 45
Hình 3.2 Quá trình di chuyển của các điểm vận hành khi sử dụng phương pháp IB-AVC 47
Hình 3. 3 Sơ đồ cấu tạo mạch lực BBĐ DC/DC buck ......................................................... 51
Hình 3.4 Sơ đồ mạch tương đương trạng thái đóng cắt BBĐ DC/DC buck ....................... 51
Hình 3.5 Sơ đồ mạch tương đương ở trạng thái tín hiệu nhỏ BBĐ DC/DC buck ............... 52
Hình 3. 6 Sơ đồ cấu tạo mạch lực BBĐ DC/DC boost ........................................................ 53
Hình 3.7 Sơ đồ mạch tương đương trạng thái đóng cắt BBĐ DC/DC boost ...................... 53
Hình 3.8 Sơ đồ mạch tương đương ở trạng thái tín hiệu nhỏ BBĐ DC/DC boost .............. 53
Hình 3. 9 Cấu trúc điều khiển PVg theo phương pháp IB-SMC ......................................... 55
Hình 3.10 Dạng quỹ đạo trượt về MPP mới khi điều khiển theo phương pháp IB-SMC ... 61
Hình 3.11 Chiến lược điều khiển theo phương pháp IB-SMC cho BBĐ DC/DC ............... 62

-xiii-
Hình 3. 12 Kịch bản biến thiên của G .................................................................................. 63
Hình 3. 13 Sơ đồ mô phỏng trên Matlab/Simulink điều khiển BBĐ DC/DC buck theo
phương pháp IB-SMC .......................................................................................................... 65
Hình 3. 14 Sơ đồ mô phỏng trên Matlab/Simulink điều khiển BBĐ DC/DC boost theo
phương pháp IB-SMC .......................................................................................................... 66
Hình 3. 15 Sơ đồ mô phỏng trên Matlab/Simulink khối PVg và bộ điều khiển IB-SMC ... 67
Hình 3. 16 Đặc tính ppv, Pmpp, A(t) khi điều khiển BBĐ DC/DC theo phương pháp IB-SMC
............................................................................................................................................. 68
Hình 3. 17 Mạch vòng điều khiển PVg theo phương pháp IB-AVC ................................... 69
Hình 3.18 Cấu trúc mạch vòng dòng điện và mạch vòng điện áp điều khiển BBĐ DC/DC
............................................................................................................................................. 70
Hình 3. 19 Mô hình Thevenin mạch điện tương đương của PVg ........................................ 72
Hình 3.20 Chiến lược điều khiển theo phương pháp IB-AVC cho BBĐ DC/DC ............... 77
Hình 3. 21 Sơ đồ mô phỏng bộ điều khiển IB-AVC ........................................................... 77
Hình 3. 22 Sơ đồ mô phỏng trên Matlab/Simulink điều khiển BBĐ DC/DC buck theo
phương pháp IB-AVC .......................................................................................................... 78
Hình 3. 23 Sơ đồ mô phỏng trên Matlab/Simulink điều khiển BBĐ DC/DC boost theo
phương pháp IB-AVC .......................................................................................................... 79
Hình 3. 24 Đặc tính ppv, Pmpp, A(t) khi điều khiển BBĐ DC/DC theo phương pháp IB-AVC
............................................................................................................................................. 80
Hình 3. 25 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC buck và G=1000 W/m282
Hình 3. 26 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC buck và G=600 W/m2 . 82
Hình 3. 27 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC buck và G=200 W/m2 . 83
Hình 3. 28 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC boost và G=1000 W/m2
............................................................................................................................................. 83
Hình 3. 29 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC boost và G=600 W/m2 84
Hình 3. 30 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC boost và G=200 W/m2 84
Hình 3. 31 Cấu trúc điều khiển phía lưới ............................................................................. 87
Hình 3.32 Cấu trúc ghép nối PVg từ các panel MF165EB3 ................................................ 88
Hình 3.33 Đặc tính vpv-ipv và vpv-ppv của cấu trúc PVg ghép .............................................. 89
Hình 3.34 Cấu trúc mô phỏng toàn hệ thống trên Matlab/Simulink .................................... 91
Hình 3.35 Đặc tính ppv(t), Pmpp(t), A(t) của PVg cấu trúc ghép ........................................... 92
Hình 3.36 Đặc tính vpv(t), Vmpp(t) của PVg cấu trúc ghép ................................................... 92
Hình 3.37 Đặc tính ipv(t), Impp(t) của PVg cấu trúc ghép ..................................................... 93
-xiv-
Hình 3.38 Đặc tính ppv(t) và công suất phát vào lưới .......................................................... 94
Hình 3. 39 Dòng điện iinv và điện áp uinv ở đầu ra BBĐ DC/AC thời điểm 1s .................... 95
Hình 3. 40 Dòng điện iinv và điện áp uinv ở đầu ra BBĐ DC/AC thời điểm 2s .................... 95
Hình 3. 41 Phổ tần số và hàm lượng sóng hài của iinv ......................................................... 96
Hình 3. 42 Phổ tần số và hàm lượng sóng hài của uinv ........................................................ 96
Hình 4. 1 Mô hình thiết bị thực của hệ thống 1 ................................................................. 100
Hình 4. 2 Mô hình thiết bị thực của hệ thống 2 ................................................................. 100
Hình 4. 3 Cảm biến PYR-BTA đo công suất của bức xạ mặt trời ..................................... 101
Hình 4. 4 Cảm biến LM35 đo nhiệt độ .............................................................................. 102
Hình 4. 5 Cấu trúc mạch lực và mạch điều khiển thực nghiệm ......................................... 104
Hình 4. 6 Các thiết bị trên mô hình thực ........................................................................... 105
Hình 4. 7 Thuật toán điều khiển của hệ thống 1 ................................................................ 106
Hình 4. 8 Thuật toán điều khiển/quản lý năng lượng của hệ thống 2 ................................ 107
Hình 4. 9 Chương trình giám sát/điều khiển trên máy tính ............................................... 107
Hình 4. 10 Phương thức vận hành mô hình thiết bị thực ................................................... 108
Hình 4. 11 Kiểm chứng tính chính xác của các điểm mới trong luận án ........................... 109
Hình 4. 12 Đồ thị G, T, Pmpp, ppv khi so sánh kỹ thuật IB với kỹ thuật P&O .................... 111
Hình 4. 13 Đồ thị G, T, Pmpp, ppv khi so sánh kỹ thuật IB với kỹ thuật CV ....................... 113
Hình 4. 14 Đồ thị G, T, Pmpp, ppv khi so sánh kỹ thuật IB với kỹ thuật Temp ................... 114
-xv-
DANH MỤC CÁC BẢNG
Bảng 2.1 Datasheet của PVg ở STC ................................................................................... 30
Bảng 2. 2 Kết quả tính toán thông số ẩn của PVg ở STC .................................................... 30
Bảng 2. 3 Kết quả xác định thông số tại MPP sử dụng kỹ thuật IB .................................... 35
Bảng 2. 4 Kiểm tra giá trị của Pmpp khi G thay đổi, T=Tstc .................................................. 37
Bảng 2. 5 Kiểm tra giá trị của Pmpp khi T thay đổi, G=Gstc ................................................. 37
Bảng 2. 6 Kiểm tra lại ảnh hưởng của T khi G=Gstc, T biến thiên tới Pmpp ......................... 40
Bảng 3. 1 Giá trị các thông số mô phỏng của cấu trúc PVg ghép ....................................... 88
Bảng 4. 1 So sánh hiệu quả năng lượng của kỹ thuật IB với kỹ thuật P&O ...................... 112
Bảng 4. 2 So sánh hiệu quả năng lượng của kỹ thuật IB với kỹ thuật CV ........................ 112
Bảng 4. 3 So sánh hiệu quả năng lượng của kỹ thuật IB với kỹ thuật Temp.................... 114
1
MỞ ĐẦU
Tính cấp thiết của đề tài
Trong bối cảnh các nguồn năng lượng truyền thống như nhiệt điện, thủy
điện,... ngày càng cạn kiệt và gây ô nhiễm môi trường, động lực sử dụng các nguồn
năng lượng tái tạo như mặt trời, gió đang ngày càng trở nên mạnh mẽ. Tỷ trọng các
loại nguồn này đang tăng lên theo cấp số nhân qua các năm, nhận được sự quan tâm
của chính phủ các quốc gia trên toàn thế giới, các nhà khoa học ở tất cả lĩnh vực
liên quan.
Nguồn pin mặt trời (PVg) với ưu thế không gây tiếng ồn, có thể lắp đặt ở mọi
nơi kể cả trong khu dân cư đã giúp cho quá trình phổ biến loại nguồn này trong hệ
thống điện nhanh hơn so với các nguồn khác. Trong đó, vấn đề khai thác tối đa khả
năng phát công suất nhờ các biện pháp tìm điểm công suất cực đại (MPP) và các kỹ
thuật điều khiển bộ biến đổi (BBĐ) hoặc các loại BBĐ khác nhau trong hệ thống
khai thác PVg là mục tiêu trọng tâm trong các nghiên cứu cả trong nước và trên thế
giới của các nhà điều khiển học.
Hiện nay, đã có rất nhiều các nghiên cứu về tìm MPP. Tuy nhiên, chưa có
nghiên cứu nào giải quyết một cách trọn vẹn vấn đề khai thác tối đa công suất ở
điều kiện vận hành bất kỳ dựa trên mô hình đầy đủ của PVg, qua đó chưa đánh giá
được hiệu quả năng lượng thực sự đầy đủ, chính xác trong quá trình khai thác PVg.
Nguyên nhân của điều này là trước đây các thiết bị đo công suất của bức xạ mặt trời
(G), nhiệt độ T của lớp tiếp giáp p-n chưa thực sự phổ biến, chưa phù hợp với mỗi
chủng loại PVg, giá thành cao. Đặc biệt, mô hình toán học của PVg phục vụ cho
quá trình mô hình hóa, mô phỏng, thực nghiệm cũng chưa nhận được sự quan tâm
và giải quyết triệt để.
Bởi vậy tác giả chọn đề tài nghiên cứu "Nghiên cứu một số phương pháp
nâng cao hiệu quả khai thác nguồn pin mặt trời " nhằm hoàn thiện các vấn đề
còn đang bỏ ngỏ hoặc chưa quan tâm đầy đủ như đã kể trên.
-2-
Mục đích nghiên cứu
Đề tài tập trung nghiên cứu hoàn thiện mô hình toán học cho PVg, xây dựng
giải pháp giúp xác định chính xác thông số tại MPP, qua đó thiết lập các biện pháp
điều khiển khai thác tối đa công suất của PVg trong mọi điều kiện vận hành thực tế,
có xét tới sự thay đổi ngẫu nhiên của (G, T).
Đối tượng và phạm vi nghiên cứu
- Đối tượng nghiên cứu: Cấu trúc hệ thống khai thác PVg được làm từ chất
bán dẫn cấu trúc tinh thể trong mạng điện phân tán công suất vừa và nhỏ.
- Phạm vi nghiên cứu: các cell của PVg là đồng nhất và làm việc trong điều
kiện giống nhau.
Trọng tâm nghiên cứu của luận án
- Nghiên cứu áp dụng phương pháp Newton-Raphson xác định các thông số ẩn
cho PVg.
- Đề xuất áp dụng kỹ thuật IB (dò và chia đôi) xác định thông số tại MPP và
mối quan hệ giữa hệ số đặc trưng của n với nhiệt độ T của lớp tiếp giáp p-n.
- Kết hợp kỹ thuật IB trong bộ bám điểm công suất cực đại (MPPT) với kỹ
thuật điều khiển trượt (SMC) hoặc kỹ thuật điều khiển điện áp trung bình (AVC) để
điều khiển BBĐ DC/DC buck và BBĐ DC/DC boost nhằm đạt được mục tiêu bám
đuổi được MPP ở mọi thời điểm, qua đó nâng cao hiệu quả khai thác năng lượng từ
PVg.
- Hoàn thiện cấu trúc ghép nối lưới cho PVg, thực hiện việc điều khiển khai
thác tối đa công suất thu được từ PVg.
- Xây dựng cấu trúc mô phỏng hệ thống bằng Matlab để kiểm chứng các kết
quả nghiên cứu lý thuyết, đồng thời kết hợp cho cài đặt điều khiển trên mô hình
thiết bị thực.
Phương pháp nghiên cứu
- Phân tích hệ thống và xác định đặc thù của đối tượng nghiên cứu thông qua
nhiều cách tiếp cận.

-3-
- Lựa chọn và xây dựng những công cụ tính toán toán học cần thiết cho nghiên
cứu.
- Lựa chọn công cụ đánh giá và kiểm chứng kết quả nghiên cứu, cụ thể là: Mô
hình hóa mô phỏng bằng phần mềm Matlab và cài đặt thử nghiệm thuật toán điều
khiển trên mô hình thiết bị thực.
Ý nghĩa khoa học và thực tiễn của đề tài
- Ý nghĩa khoa học chính của đề tài là hoàn thiện được mô hình toán học cho
cấu trúc PVg bất kỳ, xây dựng và giải quyết được bài toán xác định chính xác thông
số tại MPP ở điều kiện vận hành thực tế, qua đó thiết lập các biện pháp điều khiển
giúp khai thác hoàn toàn công suất ở mọi điều kiện vận hành với các giá trị bất kỳ
của (G, T).
- Ý nghĩa thực tiễn chính là xây dựng mô hình toán đầy đủ của PVg bổ sung
cho các tài liệu, sách, đồng thời làm cơ sở cho các nghiên cứu chuyên sâu về lĩnh
vực điều khiển khai thác loại nguồn này. Hơn nữa, đề tài cũng đem lại những kinh
nghiệm cài đặt và điều khiển đối với hệ thống khai thác PVg nói riêng và các dạng
nguồn phân tán sử dụng năng lượng tái tạo khác nói chung.
Cấu trúc luận án
Luận án được bố cục thành 4 chương.
Chương 1: Giới thiệu tổng quan về vấn đề nghiên cứu thông qua cách tiếp cận
khoa học dựa trên nguồn tài liệu cập nhật là các công bố khoa học trên thế giới liên
quan đến hướng nghiên cứu của đề tài. Phân tích và xác định những vấn đề cần
nghiên cứu cho đề tài.
Chương 2: Trình bày những nghiên cứu chính về PVg.
- Xây dựng mô hình đầy đủ cho PVg, bổ sung những thông số mới chưa được
nói tới trong các nghiên cứu trước đây.
- Xây dựng thuật toán mới xác định chính xác MPP đối với mô hình PVg đầy
đủ.
-4-
- Đề xuất áp dụng kết quả nghiên cứu trên trong cấu trúc nguồn phân tán công
suất vừa và nhỏ.
Chương 3: Thiết kế hệ thống điều khiển PVg đáp ứng mục tiêu của đề tài.
- Xây dựng mô hình đối tượng điều khiển là mạch lực hệ thống khai thác PVg
có kết nối lưới.
- Thiết kế bộ điều khiển có áp dụng thuật toán mới đã xây dựng được trong
chương 2.
- Mô phỏng điều khiển hoạt động của hệ thống, so sánh chất lượng điều khiển
với các phương pháp trước đây.
Chương 4: Xây dựng mô hình thực nghiệm với quy mô nhỏ, đủ để kiểm chứng
một số kết quả nghiên cứu.
- Xây dựng sơ đồ lắp đặt và đấu nối các thiết bị mạch lực với thiết bị đo, thiết
bị điều khiển.
- Cài đặt điều khiển trên thiết bị thực.
- Đánh giá các kết quả thực nghiệm thu được để thấy được tính đúng đắn của
sự kết hợp giữa kỹ thuật IB và AVC. Đồng thời, so sánh hiệu quả năng lượng trong
cùng một điều kiện vận hành thực tế đối với hệ thống có áp dụng kết quả nghiên
cứu mới và với hệ thống áp dụng một số phương pháp điều khiển trước đây.
Kết luận chung của luận án và kiến nghị.

-5-
CHƯƠNG 1
TỔNG QUAN VẤN ĐỀ NGHIÊN CỨU
1.1 Khái quát về nguồn pin mặt trời
PVg phổ biến hiện nay được cấu thành từ các chất bán dẫn cấu trúc tinh thể
(các nguyên tố thuộc phân nhóm chính nhóm IV trong bảng tuần hoàn các nguyên
tố hóa học) như Silicon, Germanium và hình thành một lớp tiếp xúc bán dẫn p-n có
khả năng biến đổi trực tiếp năng lượng bức xạ mặt trời thành điện năng nhờ hiệu
ứng quang điện bên trong. Các nguyên tố như Boron, Photpho, Gallium, Cadmium
và Tellurium cũng được sử dụng như các chất phụ gia để gia tăng khả năng dẫn
điện cho PVg. Khi chiếu sáng lớp tiếp xúc p-n, các cặp điện tử - lỗ trống được tạo
thành, do tác dụng của điện trường tiếp xúc nên các cặp bị tách ra, bị gia tốc về các
phía đối diện và tạo nên một sức điện động quang điện.
Một đặc điểm cơ bản của PVg là luôn phát dòng điện một chiều ra mạch ngoài
khi có tải và bức xạ mặt trời chiếu vào. Mối quan hệ giữa dòng điện ipv và điện áp
vpv phát ra từ PVg là một mối quan hệ phi tuyến phức tạp, trong đó công suất phát
ra tại mỗi thời điểm phụ thuộc vào nhiệt độ T của lớp tiếp giáp p-n, công suất của
bức xạ mặt trời G và mức tiêu thụ của phụ tải [71]. Đồng thời, quá trình chuyển từ
trạng thái vận hành này sang trạng thái vận hành khác là tức thời và không bị ảnh
hưởng bởi các yếu tố liên quan đến quán tính.
Mặt khác, PVg luôn tồn tại một trạng thái vận hành mà công suất phát ra là
lớn nhất tương ứng với mỗi cặp giá trị (G, T). Khai thác được trạng thái vận hành
này sẽ giúp khắc phục được nhược điểm hiệu suất thấp, giá thành cao của dạng
nguồn này. Điều này có thể đạt được nhờ điều chỉnh lượng tải hấp thụ tương ứng
với công suất tại MPP.
Xuất phát từ các cell đơn lẻ với công suất và điện áp nhỏ, PVg thường được sử
dụng dưới dạng tổ hợp các cell thành module, tổ hợp các module thành panel, tổ
hợp các panel thành array như mô tả trên hình 1. 1 [58]. Trong đó, các nhà sản xuất
cung cấp ra thị trường các sản phẩm được đóng gói dưới dạng các panel.
-6-
Hình 1. 1 Phương pháp tổ hợp PVg
1.2 Cấu trúc chung của hệ thống khai thác nguồn pin mặt trời
PVg được khai thác trong mạng điện cô lập hoặc kết nối với lưới điện (1 pha
hoặc 3 pha) qua các BBĐ, máy biến áp (MBA). Cấu trúc chung của hệ thống này
được mô tả trên hình 1. 2 [48], [73], [74], [87], [95], [97], [103].
Hình 1. 2 Cấu trúc chung của hệ thống khai thác PVg
Phụ tải DC
DC ~
Giám sát/điều khiển
ipv vpv ug ig
Lưới điện
Vdc CS1 CS2
Điều khiển dòng/áp
Điều khiển Vdc
Đồng bộ với lưới
MPPT Chức năng cơ bản
Bù sóng hài
Điều khiển (P, Q, f)
Tích trữ điện năng
Chức năng nâng cao
Thông tin G, T
Truyền thông tin
L
DCbus
Kho điện Kết nối lưới
Mạng cô lập
CS3
DC
MBA
Thu thập thông tin, điều khiển, phân phối điện năng
PVg
DC
AC
DC
DC
Phụ tải AC
-7-
Các thông tin cần phải thu thập để thực hiện điều khiển, phân phối điện năng
là vpv, ipv, G, T, điện áp Vdc trên DCbus, điện áp ug và dòng điện ig tại điểm kết nối
lưới. Các bộ điều khiển sử dụng các thông tin thu thập được để tính toán, đưa ra các
quyết định về xung điều khiển CS1, CS2, CS3 nhờ các kỹ thuật điều khiển nhằm
thực hiện các chức năng cơ bản hoặc nâng cao như đã mô tả trên hình 1. 2.
Để thực hiện được vai trò điều khiển dòng năng lượng từ PVg cung cấp cho
phụ tải hoặc kết nối với lưới điện, các BBĐ đều sử dụng phần tử bán dẫn không
điều khiển như diode hoặc khóa chuyển mạch SW có điều khiển như thyristor,
GTO, BJT, MOSFET, IGBT kết hợp với các phần tử có khả năng tích, phóng năng
lượng như tụ điện C, cuộn cảm L. Với BBĐ DC/DC, sự thay đổi vị trí của SW có
thể thực hiện vai trò tăng áp (boost), giảm áp (buck) hoặc vừa boost vừa buck. Với
BBĐ DC/AC, các SW được điều khiển phối hợp để điều tiết dòng năng lượng trong
mỗi chu kỳ, qua đó thực hiện vai trò giữ Vdc ở giá trị không đổi, ghép nối với lưới
điện, phát công suất vào lưới điện.
1.3 Tình hình nghiên cứu trên thế giới và trong nước về pin mặt trời
1.3.1 Tình hình nghiên cứu trên thế giới
Các nghiên cứu về PVg hiện nay đều tập trung vào bài toán nâng cao hiệu quả
khai thác PVg, quản lý/điều tiết năng lượng, áp dụng các biện pháp điều khiển để
nâng cao chất lượng điện năng trong các bài toán ghép nối lưới.
• Nâng cao hiệu quả khai thác để khắc phục nhược điểm giá thành cao và hiệu
suất thấp của PVg. Vấn đề này có thể được phân chia thành 3 hướng giải quyết như
sau:
- Dịch chuyển điểm vận hành về MPP thông qua việc đưa điện áp vpv về điện
áp Vmpp tại MPP, ipv về dòng điện Impp tại MPP, điện dẫn g= ipv/vpv về giá trị điện
dẫn tối ưu (Impp/Vmpp) hoặc đưa công suất tức thời ppv phát ra từ PVg về công suất
Pmpp tại MPP ở thời điểm bất kỳ. Vì vậy, hệ thống khai thác PVg luôn được trang bị
bộ bám điểm công suất cực đại (MPPT) với những kỹ thuật khác nhau để xác định
thông số tại MPP và sử dụng với các kỹ thuật điều khiển để đưa đầu vào của BBĐ
về thông số tại MPP do MPPT cung cấp.

-8-
Kỹ thuật tìm MPP đơn giản nhất là điện áp hằng (CV) chỉ sử dụng một cảm
biến đo điện áp trên cơ sở coi điện áp tại MPP gần như không thay đổi so với giá trị
Vmpp ở STC. Giá trị này sẽ được bộ điều khiển duy trì không đổi trong suốt quá
trình vận hành PVg [71], [77], [78].
Kỹ thuật dòng điện ngắn mạch (SC) sử dụng một phần tử đóng cắt theo chu kỳ
mắc song song vào hai đầu PVg để gây ngắn mạch và một cảm biến đo giá trị dòng
điện ngắn mạch (ISC) tại thời điểm xét. Tương tự, kỹ thuật điện áp hở mạch (OV) sử
dụng một phần tử đóng cắt theo chu kỳ mắc nối tiếp với PVg và một cảm biến đo
điện áp để đo giá trị điện áp hở mạch (VOC) tại thời điểm xét. Hai kỹ thuật này có
cách thực hiện khá tương đồng, thông tin về MPP được xác định bởi tích của hệ số
dòng kImppSC so với dòng điện ngắn mạch hoặc hệ số áp kVmppOV so với điện áp hở
mạch [30], [71], [77], [78].
Các kỹ thuật tạo nhiễu loạn và quan sát (P&O), điện dẫn gia tăng (INC), dò
tìm cực trị (ESC), trọng lượng 3 điểm đều sử dụng cảm biến đo dòng điện và điện
áp ở đầu ra của PVg tại mỗi thời điểm đo để đưa ra nhận định về điểm vận hành.
Trong đó, kỹ thuật P&O đánh giá dấu độ lệch sự biến thiên công suất với điện áp
(dppv/dvpv) giữa hai thời điểm liên tiếp trong khi kỹ thuật INC lại đánh giá dấu của
độ lệch điện dẫn tức thời g với độ gia tăng điện dẫn dipv/dvpv (dipv/dvpv+g) giữa hai
thời điểm liên tiếp [30], [68], [71], [72], [77], [78]. Kỹ thuật ESC thực hiện quan sát
dao động dựa trên việc thêm một sóng dao động hình sin vào tín hiệu vpv (hoặc ipv)
để đánh giá dao động công suất [30], [32], [71], [81], [82]. Kỹ thuật trọng lượng 3
điểm (three-point weight) là một kỹ thuật giúp tìm MPP thông qua quá trình thay
đổi độ rộng xung và quan sát công suất thu được của 3 trạng thái gần nhất thông qua
quá trình chủ động thay đổi độ rộng xung để thử phản ứng của PVg nên kỹ thuật
trọng lượng 3 điểm khá tương đồng với kỹ thuật P&O, INC [54], [71]
Kỹ thuật nhiệt độ (Temp) đưa ra thông tin về Vmpp nhờ việc sử dụng giá trị
điện áp tại MPP ở STC, hệ số thay đổi điện áp theo nhiệt độ (CTV) và thông tin về T
nhờ cảm biến đo nhiệt độ (TempS) [39], [71]. Kỹ thuật này không đánh giá ảnh
hưởng sự thay đổi của G đến Vmpp.
-9-
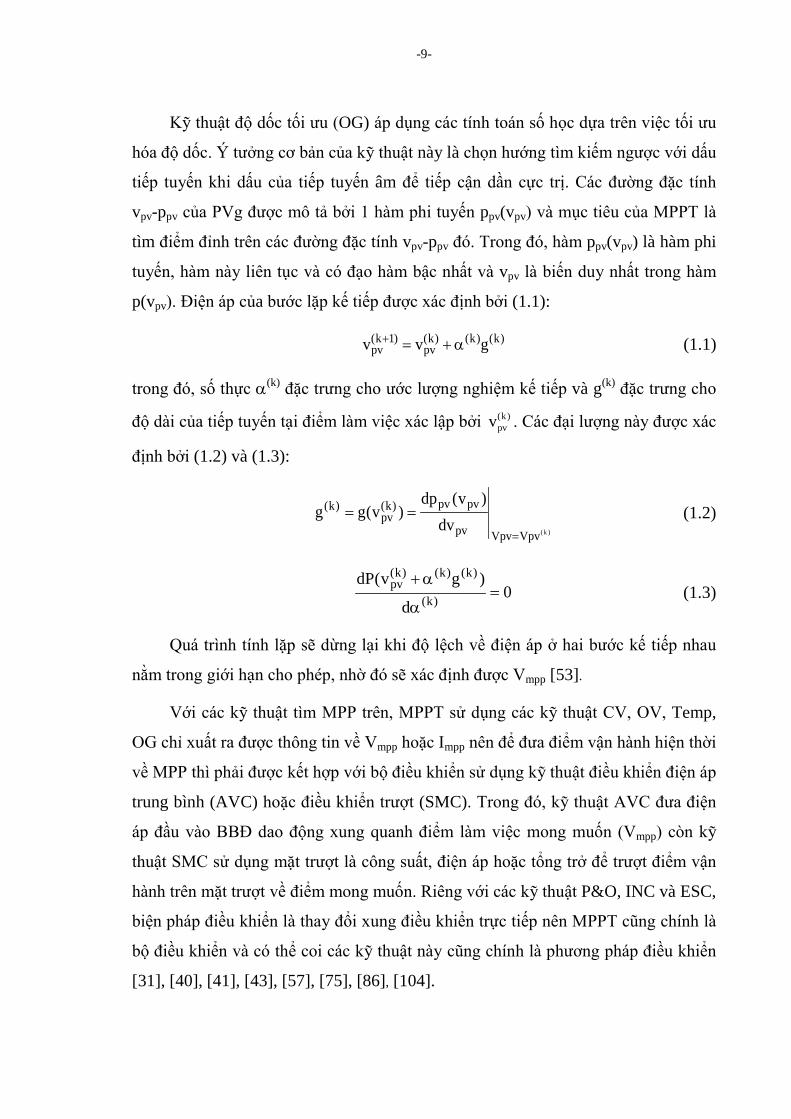
Kỹ thuật độ dốc tối ưu (OG) áp dụng các tính toán số học dựa trên việc tối ưu
hóa độ dốc. Ý tưởng cơ bản của kỹ thuật này là chọn hướng tìm kiếm ngược với dấu
tiếp tuyến khi dấu của tiếp tuyến âm để tiếp cận dần cực trị. Các đường đặc tính
vpv-ppv của PVg được mô tả bởi 1 hàm phi tuyến ppv(vpv) và mục tiêu của MPPT là
tìm điểm đỉnh trên các đường đặc tính vpv-ppv đó. Trong đó, hàm ppv(vpv) là hàm phi
tuyến, hàm này liên tục và có đạo hàm bậc nhất và vpv là biến duy nhất trong hàm
p(vpv). Điện áp của bước lặp kế tiếp được xác định bởi (1.1):
)k()k()k(pv
)1k(pv gvv α+=+ (1.1)
trong đó, số thực α(k) đặc trưng cho ước lượng nghiệm kế tiếp và g(k) đặc trưng cho
độ dài của tiếp tuyến tại điểm làm việc xác lập bởi (k)pvv . Các đại lượng này được xác
định bởi (1.2) và (1.3):
)k(VpvVpvpv
pvpv)k(pv
)k(
dv)v(dp
)v(gg=
== (1.2)
0d
)gv(dP)k(
)k()k()k(pv =
α
α+ (1.3)
Quá trình tính lặp sẽ dừng lại khi độ lệch về điện áp ở hai bước kế tiếp nhau
nằm trong giới hạn cho phép, nhờ đó sẽ xác định được Vmpp [53].
Với các kỹ thuật tìm MPP trên, MPPT sử dụng các kỹ thuật CV, OV, Temp,
OG chỉ xuất ra được thông tin về Vmpp hoặc Impp nên để đưa điểm vận hành hiện thời
về MPP thì phải được kết hợp với bộ điều khiển sử dụng kỹ thuật điều khiển điện áp
trung bình (AVC) hoặc điều khiển trượt (SMC). Trong đó, kỹ thuật AVC đưa điện
áp đầu vào BBĐ dao động xung quanh điểm làm việc mong muốn (Vmpp) còn kỹ
thuật SMC sử dụng mặt trượt là công suất, điện áp hoặc tổng trở để trượt điểm vận
hành trên mặt trượt về điểm mong muốn. Riêng với các kỹ thuật P&O, INC và ESC,
biện pháp điều khiển là thay đổi xung điều khiển trực tiếp nên MPPT cũng chính là
bộ điều khiển và có thể coi các kỹ thuật này cũng chính là phương pháp điều khiển
[31], [40], [41], [43], [57], [75], [86], [104].

-10-
Một cách tiếp cận vấn đề tìm MPP khác, đó là chỉ sử dụng kỹ thuật SMC hoặc
mạng nơron (ANN) như MPPT. Với kỹ thuật SMC, tài liệu [41] sử dụng mặt trượt
là dipv/dt trên cơ sở coi tổng trở tải của PVg không thay đổi trong quá trình điều
khiển trong khi tài liệu [57] sử dụng kỹ thuật SMC với mặt trượt là công suất để
đánh giá sự biến thiên về dấu của công suất của các bước kế tiếp nhau. Đồng thời,
các tài liệu [38], [40], [43], [75], [76], [86], [104] sử dụng kỹ thuật SMC kết hợp
với kỹ thuật P&O hoặc ESC. Với kỹ thuật ANN, bộ điều khiển phải thực hiện quá
trình huấn luyện để có được cơ sở dữ liệu về mối tương quan giữa độ rộng xung
điều khiển, MPP với cặp giá trị của (G, T) [21], [22], [24], [27], [71], [83].
Kết hợp logic mờ (FL) với ANN hoặc P&O cũng là một hướng tiếp cận với
vấn đề tìm MPP [24], [30], [71], [80], [85]. Bản chất của cách thực hiện này là làm
giảm thời gian huấn luyện của ANN hoặc giảm bước nhảy khi đạt đỉnh.
Các phân tích trên cho thấy có nhiều cách để nhận dạng và đưa PVg vận hành
ở MPP, trong đó tài liệu [30] đã đề xuất chia các kỹ thuật này thành ba nhóm là
nhóm các kỹ thuật offline, nhóm các kỹ thuật online và nhóm lai FL với ANN hoặc
P&O. Các kỹ thuật online (bao gồm P&O, INC, ESC) sử dụng thông tin tức thời về
dòng điện và điện áp của PVg, các kỹ thuật offline (như OV, SC, ANN) sử dụng mô
hình cơ bản, thường là các thông số vật lý của PVg để nhận dạng MPP.
Các kỹ thuật dò tìm MPP và kỹ thuật điều khiển đã phân tích ở trên chỉ áp
dụng cho các trường hợp các cell của PVg là đồng nhất và có điều kiện làm việc
hoàn toàn giống nhau. Với các trường hợp làm việc không đồng nhất hoặc không
giống nhau như bị che khuất hay hư hỏng một phần PVg, việc phân biệt MPP thực
sự với MPP lân cận khó khăn hơn và không có nhiều biện pháp giải quyết vấn đề
này, thường có sự kết hợp giữa ANN với P&O hoặc PSO [42], [49], [50], [63], [64],
[93].
- Điều khiển góc nghiêng của PVg để bức xạ mặt trời luôn đến vuông góc với
bề mặt PVg cũng là một cách nâng cao khả năng phát điện của PVg. Ý tưởng này
khó khả thi khi thực hiện với quy mô lắp đặt PVg lớn hoặc phải mất một phần năng
lượng để thực hiện thay đổi góc nghiêng nên không có nhiều nghiên cứu theo
hướng này [16], [35], [94].

-11-
- Tăng cường khả năng làm mát bằng cách cho nước chảy ở mặt sau các panel
của PVg [19]. Thông thường, G lớn nhất vào thời điểm giữa trưa trong khi T ở
những thời điểm này rất cao nên đã hạn chế công suất phát của PVg. Vì vậy, bản
chất của làm mát là làm giảm T và khá khó thực hiện trên phạm vi rộng, có thể làm
cho nhiệt độ không đồng đều nên cũng không có nhiều nghiên cứu theo hướng này.
• Xây dựng các chương trình quản lý/điều tiết năng lượng trong những hệ
thống lai ghép giữa PVg với kho điện (ắc quy, pin nhiên liệu, siêu tụ), điện gió, lưới
điện. Mục tiêu của bài toán này này là xây dựng các biểu đồ vận hành tối ưu cho
mỗi phần tử trong hệ thống, qua đó đạt được hàm mục tiêu giảm thiểu chi phí mua
điện từ lưới tại điểm kết nối lưới hoặc giảm thiểu lượng điện huy động từ lưới trong
khoảng thời gian xét (xây dựng các ốc đảo vận hành ở chế độ bán cô lập) [48], [73],
[74], [95], [103]. Để thực hiện bài toán này, hệ thống điện phải được vận hành theo
cấu trúc của mạng điện thông minh bao gồm hệ thống dự báo thời tiết chuyên cho
khai thác năng lượng tái tạo, hệ thống truyền tin và các chuyên gia điều độ vận hành
[6], [52], [106].
• Áp dụng các các kỹ thuật điều khiển để được các mục tiêu như phát công
suất vào lưới điện, hòa lưới, nâng cao chất lượng điện năng. PVg có thể được kết
nối vào lưới điện 3 pha (hoặc 1 pha) với cùng một cấu trúc (sử dụng BBĐ DC/DC
và DC/AC) [97]. Trong đó, BBĐ DC/AC (1 pha hoặc 3 pha) có vai trò giữ ổn định
điện áp trên DCbus ở giá trị đặt, duy trì kết nối lưới và đảm bảo hàm lượng sóng hài
của dòng điện, điện áp nằm trong giới hạn cho phép nên đều có cấu trúc điều khiển
hai mạch vòng (dòng điện và điện áp) [33], [66], [96], [97]. Các kỹ thuật điều khiển
cũng như cách thức xác định thông số của các bộ điều khiển đã trở thành kinh điển,
đã được các nhà nghiên cứu tập trung và giải quyết khá triệt để.
1.3.2 Tình hình nghiên cứu trong nước
Tài liệu [4] đã chỉ ra một số biện pháp nâng cao chất lượng và hiệu suất cho hệ
thống khai thác PVg như vận hành tại MPP, sử dụng các BBĐ hiệu suất cao, kết
hợp với điện gió, cải tiến cell. Trong đó có phân biệt các kỹ thuật tìm MPP thành
hai nhóm là nhóm kỹ thuật tìm kiếm và nhóm kỹ thuật dựa trên mô hình toán học.
Nhóm kỹ thuật tìm kiếm dễ thực hiện với chi phí thấp nhưng mất nhiều thời gian
-12-
mới hội tụ về MPP trong khi nhóm kỹ thuật dựa trên mô hình toán hội tụ nhanh hơn
nhưng đòi hỏi phải biết chính xác thông số của PVg, phải trang bị các thiết bị đo G,
T và phải sử dụng máy tính tốc độ cao.
Các nghiên cứu trong nước về vấn đề tìm MPP đều tập trung vào nhóm kỹ
thuật tìm kiếm như INC, P&O hay SC [1], [7], [15]. Tài liệu [8] đã thực hiện việc
quan sát dao động dựa trên kỹ thuật FL thông qua việc so sánh công suất hiện thời
với công suất lần lấy mẫu trước: nếu nhỏ hơn (hoặc lớn hơn) thì điều khiển điện áp
đầu ra theo hướng ngược lại, nếu không thì duy trì điện áp đầu ra không đổi. Tài
liệu [10] đã kết hợp kỹ thuật P&O và kỹ thuật FL để chia vùng đường cong vpv-ppv,
nhờ đó bộ điều khiển tự động giảm độ lớn bước nhảy khi điểm vận hành tiến dần
đến đỉnh. Đồng thời các tài liệu [2], [5] cũng thực hiện xây dựng cấu trúc điều khiển
cho hệ ghép giữa PVg với điện gió hoặc pin nhiên liệu. Một số nghiên cứu khác tập
trung vào vấn đề điều khiển BBĐ, cải thiện các bộ biến đổi để mang lại khả năng
điều khiển dạng nguồn năng lượng tái tạo tốt hơn như BBĐ nguồn Z, BBĐ đa mức
[11], [14], [17], [18].
Các phân tích trên cho thấy các nghiên cứu trong nước chủ yếu tập trung vào
giải quyết các bài toán điều khiển BBĐ hoặc xây dựng các BBĐ mà chưa có những
nghiên cứu đi sâu vào bản chất của PVg.
Các nghiên cứu trên thế giới và trong nước đã tập trung vào một số hướng
nghiên cứu khác nhau nhưng đều tập trung vào giải quyết bài toán khai thác tối ưu
nhất nguồn năng lượng phát ra từ PVg và đây cũng sẽ là đối tượng nghiên cứu của
luận án. Trong đó, tập trung vào vấn đề xác định chính xác các thông số tại MPP để
làm thông số đặt cho bộ điều khiển, qua đó nâng cao hiệu quả khai thác PVg.
1.4 Một số vấn đề còn tồn tại và đề xuất hướng giải quyết
1.4.1 Một số vấn đề còn tồn tại
• Vấn đề vận hành ở MPP cho đến nay vẫn tồn tại những nhược điểm, cụ thể:
- Kỹ thuật CV chỉ tương đối phù hợp khi vận hành ở điều kiện gần với STC
[71], [77], [78].
- Kỹ thuật Temp chỉ tương đối phù hợp ở mức G cao [39], [71].
-13-
- Kỹ thuật OG sử dụng thông tin về (G, T) và cần cung cấp đầy đủ các thông
số của chủng loại PVg. Việc giải (1.3) gặp nhiều khó khăn và thiếu chính xác do
phải sử dụng mô hình toán học giản lược của PVg (lược bớt thành phần dòng điện ở
1 vế trong phương trình mô tả PVg để giảm bớt tính đa biến), việc xác định dấu và
độ lớn của độ dốc gặp nhiều khó khăn [53].
- Kỹ thuật P&O, INC và ESC không bao giờ tồn tại một trạng thái vận hành
ổn định do thông tin có được từ thiết bị đo lường luôn dao động khiến cho bộ điều
khiển luôn đi tìm điểm làm việc mới và luôn gây tổn hao dao động công suất trong
mạch. Hơn nữa, độ tổn hao công suất khi sử dụng các kỹ thuật này trong các điều
kiện vận hành thực tế còn phụ thuộc vào bước nhảy độ rộng xung ∆d nên không
thực sự khai thác được hết năng lượng của PVg [7], [68], [71], [72], [77], [78], [81],
[82].
- Kỹ thuật ANN sử dụng thông tin về (G, T) với bản chất là áp dụng ngay kỹ
thuật điều khiển trong MPPT nên phải dùng các máy tính tốc độ cao, bộ nhớ lớn,
mất nhiều thời gian để thu thập nhiều mẫu giá trị, đánh giá thử nghiệm, huấn luyện
đặc biệt cho mỗi cấu trúc của PVg rồi mới sử dụng được [21], [22], [27], [30], [71],
[83], [85]. Kỹ thuật ANN, FL kết hợp với kỹ thuật P&O để dập dao động thông qua
quá trình theo dõi và thay đổi ∆d khi đang ở gần MPP thường không có ý nghĩa
trong thực tiễn bởi vì giá trị của G trong thực tế không thực sự giữ ổn định nên PVg
luôn làm việc ở trạng thái dao động [10], [24], [71], [80].
- Kỹ thuật OV và SC luôn gây dao động trong mạch, gây mất mát năng lượng
trong những khoảng thời gian gây hở mạch hoặc ngắn mạch và bộ điều khiển thích
ứng trở lại [15], [71], [78].
- Giải pháp tiếp cận MPP sử dụng kỹ thuật SMC như MPPT trong tài liệu [41],
[57] chưa đánh giá đúng bản chất của PVg khi coi tổng trở tải là không đổi hoặc
chưa đưa ra được giải pháp xác định thông tin công suất tại MPP để đánh giá điểm
dừng của chế độ trượt. Giải pháp kết hợp kỹ thuật SMC với kỹ thuật P&O hoặc
ESC trong các tài liệu [38], [40], [43], [75], [76], [86], [104] vẫn giữ những nhược
điểm của kỹ thuật P&O, ESC.

-14-
Các phân tích trên cho thấy có rất nhiều các nghiên cứu tập trung vào vấn đề
tìm MPP và có nhiều cách tiếp cận MPP từ nhiều hướng khác nhau. Mặc dù hầu hết
các kỹ thuật trên đều đưa ra nhận định về MPP theo thời gian thực khi vận hành
thực tế nhưng sự phân loại các kỹ thuật này chưa thống nhất và không thể hiện được
bản chất của mỗi dạng kỹ thuật đó. Vì vậy, luận án đề xuất phân chia các kỹ thuật
này thành hai dạng như trên hình 1. 3.
Hình 1. 3 Phân loại kỹ thuật tìm MPP
Nhóm thứ nhất là kỹ thuật offline, bao gồm kỹ thuật Temp, OG, ANN, CV.
Đặc điểm chung của nhóm kỹ thuật này là đưa ra dự đoán về MPP trước rồi mới
đưa ra tín hiệu điều khiển để BBĐ đưa PVg về chế độ vận hành mong muốn và cần
phải cung cấp các thông số của PVg cho bộ điều khiển. Cho đến thời điểm hiện tại,
nhóm kỹ thuật này tồn tại nhược điểm chưa khắc phục được như chỉ chính xác khi
điều kiện vận hành gần với STC (G=Gstc=1000 W/m2, T=Tstc=250C) hoặc mất nhiều
thời gian để bộ điều khiển thích ứng được với chủng loại PVg được sử dụng.
Nhóm thứ hai là kỹ thuật online, bao gồm OV, CV, P&O, INC, trọng lượng 3
điểm, ESC, ANN, FL kết hợp P&O. Đặc điểm chung của nhóm kỹ thuật này là chủ
động can thiệp vào mạch bằng xung điều khiển để thử phản ứng của PVg rồi mới
đưa ra dự đoán về MPP. Để thực hiện, các kỹ thuật này không cần cung cấp đầy đủ
các thông số của PVg, dễ thực hiện do chủ yếu dựa trên thông tin về dòng điện, điện
áp tức thời ở đầu ra của PVg. Nhược điểm chủ yếu của nhóm kỹ thuật này là tạo
Các kỹ thuật tìm
MPP
Offline
Online
Sử dụng cảm biến đo G, T
Không sử dụng cảm biến đo G, T CV
ANN
Temp
Sử dụng 1 cảm biến đo V hoặc I
Sử dụng 2 cảm biến đo V, I
OV
SC P&O, INC, ESC
hoặc trọng lượng 3 điểm
OG
ANN, FL kết hợp P&O
-15-
dao động trong mạch, gây tổn thất năng lượng nên không thể khai thác được toàn bộ
năng lượng có thể phát ra từ PVg ở các thông số vận hành khác nhau của (G, T).
• Vấn đề mô hình hóa PVg
Vấn đề tồn tại bên cạnh tìm MPP là các nhà sản xuất không công bố đầy đủ
các thông số của mỗi panel. Hơn nữa, PVg lại thường có những cấu trúc ghép nhiều
panel với nhau khiến cho các thông số trên mô hình toán học của cấu trúc ghép
cũng là những yếu tố ẩn. Những tham số ẩn này khiến việc thực hiện mô hình hóa,
mô phỏng PVg thiếu chính xác và không đánh giá được toàn diện phản ứng của
PVg trong những điều kiện vận hành khác nhau.
Giá trị của các thông số ẩn như dòng quang điện Iph, điện áp nhiệt lớp tiếp giáp
Vt, điện trở nối tiếp RS, điện trở song song Rp, dòng quang điện bão hòa I0 ở STC đã
được đề xuất xác định bởi phương pháp Gauss-Seidel hoặc phương pháp Newton-
Raphson [25], [27], [36]. Riêng hệ số đặc trưng n của diode lại không được xác định
và thường được nhà nghiên cứu về điều khiển bỏ qua khiến cho việc xác định MPP
khó khăn và không chính xác.
1.4.2 Tiếp cận vấn đề
Phân tích các kỹ thuật online một cách chi tiết hơn cho thấy nguyên nhân của
việc luôn phải đi dò tìm điểm làm việc mới để phán đoán về MPP là không đánh giá
được sự thay đổi của biến đầu vào (G, T). Bên cạnh đó, khi xem xét vấn đề tìm
MPP ở góc nhìn khác, kỹ thuật Temp, OG hay ANN sử dụng thông tin về (G, T) tuy
còn tồn tại những nhược điểm riêng nhưng đã đưa ra một ý tưởng khá tốt để vận
hành PVg. Ý tưởng đó chính là ấn định một xung điều khiển phù hợp tương ứng với
sự thay đổi của (G, T) giúp khắc phục yếu tố đặc điểm dễ dao động của PVg, qua đó
gây tránh gây hao hụt công suất trong mạch. Trong đó, kỹ thuật ANN mặc dù sử
dụng thông tin về (G, T) nhưng không yêu cầu thông tin chi tiết về thông số của
PVg nên các giá trị này chỉ có ý nghĩa xây dựng lịch sử vận hành về đối tượng
PVg. Mặt khác, tài liệu [53] đưa ra ý tưởng về kỹ thuật OG sử dụng mô hình toán
học chính xác của PVg, chưa xây dựng được phương pháp luận giải tìm hệ số ước
lượng nghiệm αk khiến việc xác định MPP gặp nhiều khó khăn và thông tin của (G,
-16-
T) nhưng phải lược bỏ bớt thành phần phi tuyến, trong đó T là thông tin về nhiệt độ
môi trường Tamb có được nhờ sử dụng một cảm biến đo nhiệt độ (TempS).
Những nhận định trên cho thấy PVg cũng giống như bất kỳ loại nguồn điện
nào khác, muốn khai thác được tối đa công suất thì phải xác định được chính xác
MPP ở mọi điều kiện vận hành tương ứng với cặp giá trị (G, T) và loại PVg sử dụng
để cung cấp cho bộ điều khiển. Lý do trước đây ý tưởng này chưa được các nhà
nghiên cứu tập trung vì gặp phải hạn chế vấn đề mô hình toán học mô tả PVg (chưa
đầy đủ) và hạn chế về thiết bị đo. Với hạn chế về thiết bị đo, cần phải sử dụng PYR
(pyranometer) có dải bước sóng bức xạ mặt trời đo được phù hợp với dải bước sóng
bức xạ mặt trời mà PVg có thể hấp thụ cũng như cách lấy thông tin về T khi sử
dụng TempS.
Với thông tin về G, trên thị trường hiện nay có nhiều loại với nhiều dải bước
sóng hấp thụ và giá thành khác nhau. Trong đó PYR-BTA của hãng Vernier có dải
bước sóng hấp thụ từ (380 ÷ 1140) nm rất phù hợp với PVg làm từ chất bán dẫn cấu
trúc đa tinh thể có giá chỉ vài triệu đồng [100].
Với thông tin về T, các tài liệu [20], [23], [59] đã đề xuất sử dụng các đại
lượng (G, Tamb, tốc độ gió) để quy đổi Tamb về T tuy nhiên cách quy đổi này không
thực sự chính xác vì nhiệt độ lớp tiếp giáp p-n là nhiệt độ của vật rắn nên thay đổi
rất chậm và không hoàn toàn giống quy luật của G. Các tài liệu [65] và [67] đã chỉ
ra một phương pháp xác định T, đó là sử dụng TempS gắn ở mặt sau của PVg và
thông tin về nhiệt độ có được từ TempS là do quá trình truyền nhiệt từ panel PVg
vào TempS và ít chịu ảnh hưởng của nhiệt từ bức xạ mặt trời nhất. Bởi vậy, việc
gắn TempS ở mặt sau của panel PVg sẽ giúp có được thông tin về T gần với giá trị
thực nhất.
1.4.3 Đề xuất hướng giải quyết
Bài toán vận hành PVg tại MPP chỉ được sử dụng trong những hệ thống có
khả năng hấp thụ công suất không giới hạn như kho điện hoặc lưới điện. Bản chất
của bài toán này là sự hợp nhất của hai bài toán: đưa ra nhận định về MPP và sử
dụng các kỹ thuật điều khiển để đưa PVg về vận hành ở MPP. Với mục tiêu nâng
cao hiệu quả khai thác PVg, cụ thể là xây dựng phương pháp luận cụ thể để cải tiến
-17-
MPPT và thiết lập các giải pháp điều khiển, luận án sẽ tập trung vào một số vấn đề
sau:
- Giải quyết vấn đề xác định thông số ẩn của PVg với việc áp dụng phương
pháp Newton-Raphson. Trên cơ sở đó, đề xuất một kỹ thuật offline mới, kỹ thuật dò
và chia đôi (sau đây gọi là kỹ thuật IB), để xác định chính xác thông số tại MPP,
qua đó cung cấp thông tin cho bộ điều khiển. Đồng thời, hoàn thiện mô hình toán
cho PVg thông qua đề xuất sử dụng phương pháp bình phương cực tiểu để xây dựng
hàm n(T) giúp nâng cao tính chính xác cho MPPT đã đề xuất ở điều kiện vận hành
bất kỳ.
- Xây dựng hai phương pháp điều khiển IB-SMC và IB-AVC (kết hợp kỹ
thuật IB với kỹ thuật SMC và AVC) áp dụng cho BBĐ DC/DC buck và BBĐ
DC/DC boost giúp nâng cao hiệu quả khai thác PVg (PVg được coi là nguồn áp).
Hơn nữa, luận án sẽ tiến hành mô phỏng so sánh phương pháp điều khiển đề xuất
với một vài phương pháp điều khiển sử dụng kỹ thuật tìm MPP truyền thống như
CV, OV, Temp, P&O dựa trên tiêu chí hiệu quả năng lượng. Đồng thời, thông qua
công tác mô phỏng, luận án sẽ đánh giá khả năng áp dụng vào thực tế của phương
pháp IB-SMC và phương pháp IB-AVC để áp dụng cho bài toán điều khiển kết nối
lưới và thực nghiệm.
- Xây dựng cấu trúc điều khiển cho hệ thống khai thác PVg kết nối lưới để
phát toàn bộ công suất khai thác được tại MPP vào lưới điện.
1.5 Kết luận chương 1
• Đúc kết từ các tài liệu tham khảo chọn lọc, chương 1 đã chỉ ra được những
vấn đề còn thiếu trong các nghiên cứu về PVg như sau:
- Giá trị các thông số trên mô hình toán của PVg không được nhà sản xuất
công bố đầy đủ.
- Thông số tại MPP (Vmpp, Impp, Pmpp) ở điều kiện vận hành bất kỳ tương ứng
với các cặp giá trị khác nhau về (G, T) và các cell của PVg hoàn toàn giống nhau đã
không được xác định chính xác.

-18-
- Biện pháp điều khiển đưa điểm vận hành hiện thời của PVg về điểm vận
hành mong muốn (MPP) vẫn chưa thống nhất và có nhiều biện pháp đã được sử
dụng nhưng vẫn còn tồn tại những nhược điểm.
• Dựa trên các phân tích về những vấn đề còn thiếu, các chương tiếp theo sẽ
thực hiện giải quyết các vấn đề sau:
- Xây dựng giải pháp xác định các thông số ẩn cho cấu trúc PVg bất kỳ.
- Xây dựng mô hình toán học đầy đủ và nhận dạng chính xác MPP cho PVg ở
điều kiện vận hành bất kỳ.
- Xây dựng cấu trúc điều khiển theo mô hình toán học chính xác của PVg cho
BBĐ DC/DC và BBĐ DC/AC có kết nối lưới.
- Kiểm chứng kết quả nghiên cứu trên phần mềm Matlab và trên mô hình thiết
bị thực.

-19-
+
-
vpv1
ipv1 RS1
Rp1
Ip1 Id1 Iph1
A
Diode + -
CHƯƠNG 2
MÔ HÌNH HÓA ĐẦY ĐỦ VÀ NHẬN DẠNG CHÍNH XÁC ĐIỂM
CÔNG SUẤT CỰC ĐẠI CHO NGUỒN PIN MẶT TRỜI
2.1 Mô hình toán học của nguồn pin mặt trời
Sơ đồ thay thế mỗi cell của PVg thường được sử dụng là mô hình mạch điện
một diode như trên hình 2. 1 [26], [28], [52], [58], [70], [71], [83].
Hình 2. 1 Sơ đồ mạch tương đương mỗi cell của PVg
Áp dụng định luật Kirchhoff 1 tại nút A cho sơ đồ hình 2. 1 có (2.1):
ph1 p1 d1 pv1I I I i= + +
pv1 pv1 S1 pv1 pv1 S1pv1 ph1 01
p1
q(v i R ) v i Ri I I exp 1
nkT R + + ⇔ = − − −
(2.1)
trong đó: Iph1 là dòng quang điện phát ra từ 1 cell (A),
ipv1 là dòng điện phát ra mạch ngoài của 1 cell (A),
vpv1 là điện áp đặt lên mạch ngoài của 1 cell (V),
Id1 là dòng điện qua diode của 1 cell (A),
I01 là dòng quang điện bão hòa của 1 cell (A),
Ip1 là dòng điện chạy qua điện trở song song của 1 cell (A),
k là hằng số Boltzmann, k=1.38x10-23 (J/K),
q là điện tích của electron, q=1.6x10-19 (C),

-20-
RS1 là điện trở nối tiếp của 1 cell (Ω),
Rp1 là điện trở song song của 1 cell (Ω),
n là hệ số đặc trưng cho diode.
Đặt Vt1=kT/q (được gọi là điện áp nhiệt lớp tiếp giáp của 1 cell), quan hệ giữa
ipv1 và vpv1 điện áp (2.1) được viết lại dưới dạng [29]:
pv1 pv1 S1 pv1 pv1 S1pv1 ph1 01
t1 p1
v i R v i Ri I I exp 1
nV R + + = − − −
(2.2)
Công suất tức thời phát ra từ mỗi cell được xác định theo (2.7):
pv1 pv1 pv1p v i= (2.3)
Đường đặc tính vpv-ipv biểu diễn (2.2) và đường đặc tính vpv-ppv biểu diễn (2.3)
cho mỗi cell như trên hình 2. 2 cho thấy luôn luôn tồn tại 3 điểm đặc biệt là điểm
ngắn mạch, điểm hở mạch và MPP. Các điểm đặc biệt này sẽ được đặc trưng bởi
giá trị dòng điện ngắn mạch của mỗi cell (ISC1), thông số tại MPP của mỗi cell (điện
áp Vmpp1, dòng điện Impp1, công suất Pmpp1) và điện áp hở mạch của mỗi cell (VOC1).
Hình 2. 2 Đường đặc tính vpv-ipv và vpv-ppv trên mặt phẳng v-i, v-p
Các cell của PVg đều có chung một đặc điểm là điện áp, dòng điện, công suất
phát ra khá nhỏ nên không được sử dụng dưới dạng đơn lẻ trong những ứng dụng
thực tế. Các nhà sản xuất thường tổ hợp nối tiếp NS cell, song song Np cell trong
mỗi sản phẩm panel được thương mại hóa. Nếu các cell đồng nhất, theo nguyên tắc
xếp chồng dòng điện và điện áp cũng như quy tắc tính điện trở tương đương của các
phần tử mắc nối tiếp hoặc song song, mối quan hệ giữa các đại lượng của cấu trúc
p i
v
Vmpp1
Impp1
MPP
(VOC1, 0)
(0, ISC1)
Đường đặc tính vpv-ipv
Đường đặc tính vpv-ppv
Điểm hở mạch
Điểm ngắn mạch
Đỉnh đường đặc tính vpv-ppv
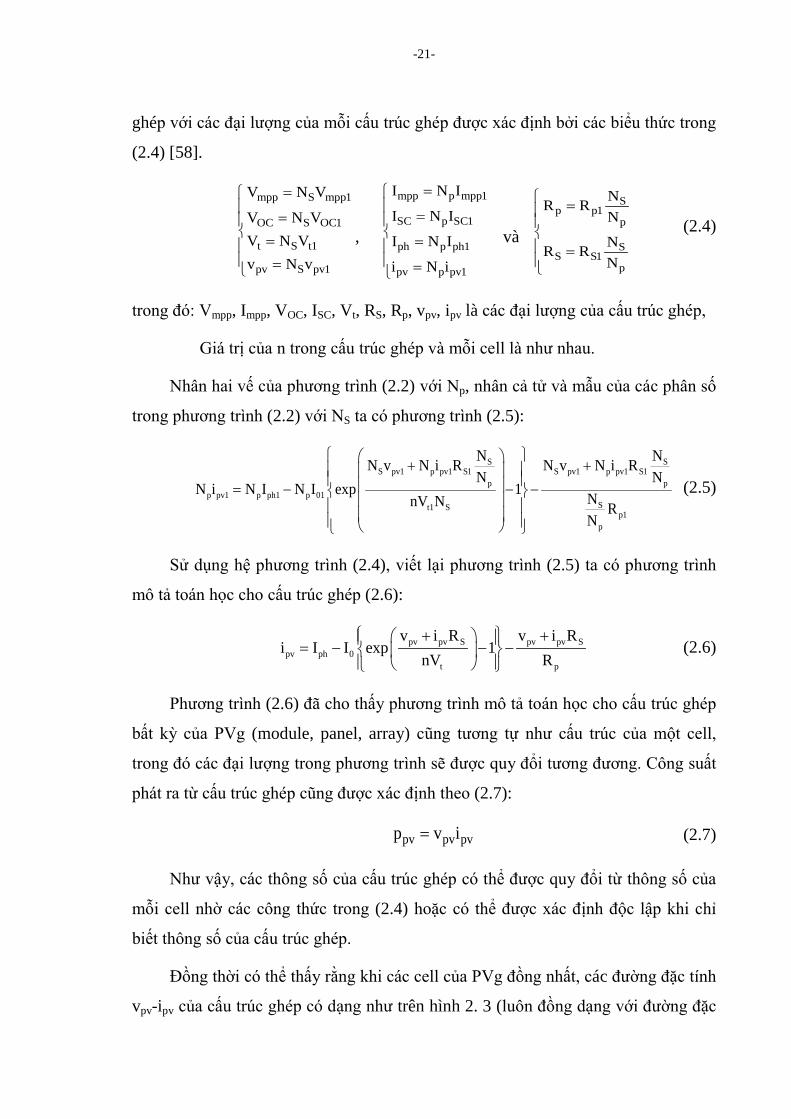
-21-
ghép với các đại lượng của mỗi cấu trúc ghép được xác định bởi các biểu thức trong
(2.4) [58].
mpp S mpp1
OC S OC1
t S t1
pv S pv1
V N V
V N VV N Vv N v
=
= = =
,
mpp p mpp1
SC p SC1
ph p ph1
pv p pv1
I N I
I N I
I N I
i N i
=
= = =
và
Sp p1
p
SS S1
p
NR RN
NR RN
= =
(2.4)
trong đó: Vmpp, Impp, VOC, ISC, Vt, RS, Rp, vpv, ipv là các đại lượng của cấu trúc ghép,
Giá trị của n trong cấu trúc ghép và mỗi cell là như nhau.
Nhân hai vế của phương trình (2.2) với Np, nhân cả tử và mẫu của các phân số
trong phương trình (2.2) với NS ta có phương trình (2.5):
S SS pv1 p pv1 S1 S pv1 p pv1 S1
p pp pv1 p ph1 p 01
St1 Sp1
p
N NN v N i R N v N i RN N
N i N I N I exp 1 NnV N RN
+ + = − − −
(2.5)
Sử dụng hệ phương trình (2.4), viết lại phương trình (2.5) ta có phương trình
mô tả toán học cho cấu trúc ghép (2.6):
pv pv S pv pv Spv ph 0
t p
v i R v i Ri I I exp 1
nV R + + = − − −
(2.6)
Phương trình (2.6) đã cho thấy phương trình mô tả toán học cho cấu trúc ghép
bất kỳ của PVg (module, panel, array) cũng tương tự như cấu trúc của một cell,
trong đó các đại lượng trong phương trình sẽ được quy đổi tương đương. Công suất
phát ra từ cấu trúc ghép cũng được xác định theo (2.7):
pv pv pvp v i= (2.7)
Như vậy, các thông số của cấu trúc ghép có thể được quy đổi từ thông số của
mỗi cell nhờ các công thức trong (2.4) hoặc có thể được xác định độc lập khi chỉ
biết thông số của cấu trúc ghép.
Đồng thời có thể thấy rằng khi các cell của PVg đồng nhất, các đường đặc tính
vpv-ipv của cấu trúc ghép có dạng như trên hình 2. 3 (luôn đồng dạng với đường đặc
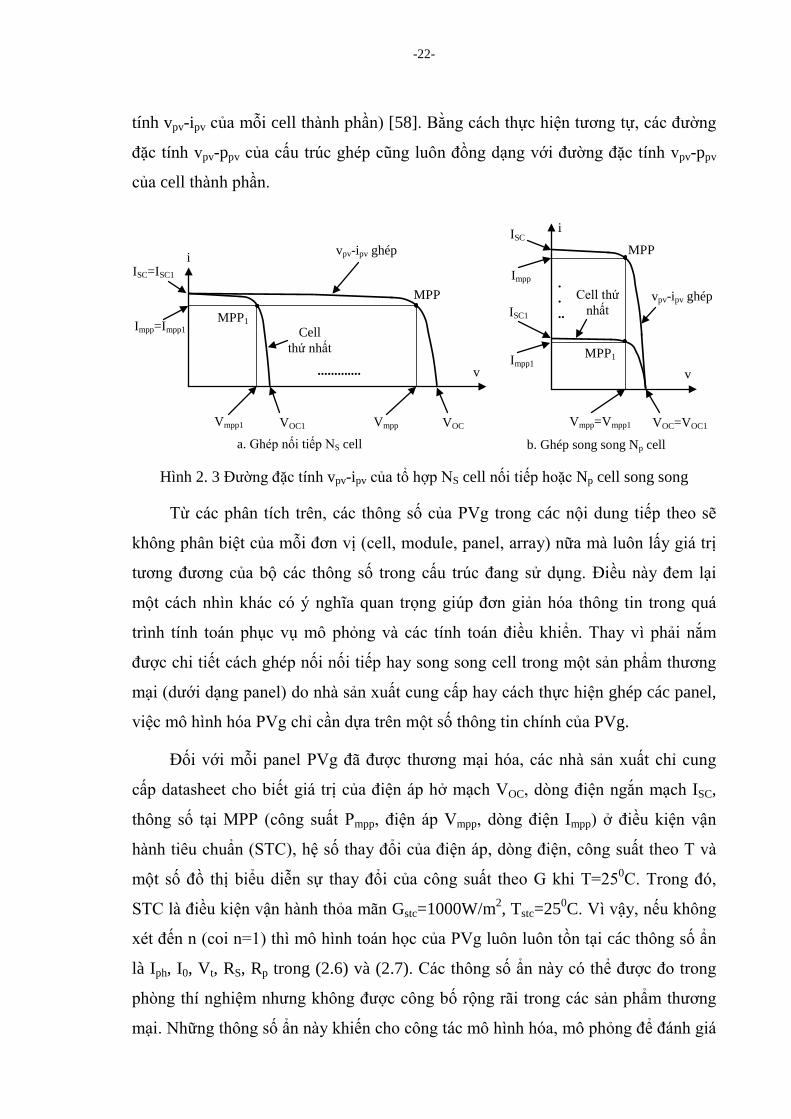
-22-
tính vpv-ipv của mỗi cell thành phần) [58]. Bằng cách thực hiện tương tự, các đường
đặc tính vpv-ppv của cấu trúc ghép cũng luôn đồng dạng với đường đặc tính vpv-ppv
của cell thành phần.
Hình 2. 3 Đường đặc tính vpv-ipv của tổ hợp NS cell nối tiếp hoặc Np cell song song
Từ các phân tích trên, các thông số của PVg trong các nội dung tiếp theo sẽ
không phân biệt của mỗi đơn vị (cell, module, panel, array) nữa mà luôn lấy giá trị
tương đương của bộ các thông số trong cấu trúc đang sử dụng. Điều này đem lại
một cách nhìn khác có ý nghĩa quan trọng giúp đơn giản hóa thông tin trong quá
trình tính toán phục vụ mô phỏng và các tính toán điều khiển. Thay vì phải nắm
được chi tiết cách ghép nối nối tiếp hay song song cell trong một sản phẩm thương
mại (dưới dạng panel) do nhà sản xuất cung cấp hay cách thực hiện ghép các panel,
việc mô hình hóa PVg chỉ cần dựa trên một số thông tin chính của PVg.
Đối với mỗi panel PVg đã được thương mại hóa, các nhà sản xuất chỉ cung
cấp datasheet cho biết giá trị của điện áp hở mạch VOC, dòng điện ngắn mạch ISC,
thông số tại MPP (công suất Pmpp, điện áp Vmpp, dòng điện Impp) ở điều kiện vận
hành tiêu chuẩn (STC), hệ số thay đổi của điện áp, dòng điện, công suất theo T và
một số đồ thị biểu diễn sự thay đổi của công suất theo G khi T=250C. Trong đó,
STC là điều kiện vận hành thỏa mãn Gstc=1000W/m2, Tstc=250C. Vì vậy, nếu không
xét đến n (coi n=1) thì mô hình toán học của PVg luôn luôn tồn tại các thông số ẩn
là Iph, I0, Vt, RS, Rp trong (2.6) và (2.7). Các thông số ẩn này có thể được đo trong
phòng thí nghiệm nhưng không được công bố rộng rãi trong các sản phẩm thương
mại. Những thông số ẩn này khiến cho công tác mô hình hóa, mô phỏng để đánh giá
b. Ghép song song Np cell
Vmpp=Vmpp1
Impp1
i
v
MPP
MPP1
vpv-ipv ghép
Cell thứ nhất
Impp
i
v
Cell thứ nhất
vpv-ipv ghép
Impp=Impp1
Vmpp1 Vmpp
MPP
MPP1
a. Ghép nối tiếp NS cell
.............
VOC1 VOC
ISC=ISC1
VOC=VOC1
ISC1
ISC
.
.
..
-23-
chính xác hoạt động của một đối tượng như PVg trước khi đưa ra lắp đặt trên thực
tế gặp nhiều khó khăn. Vì vậy, cần phải xây dựng một phương pháp luận để xác
định giá trị các thông số ẩn cho cấu trúc PVg bất kỳ.
2.2 Xây dựng giải pháp nhận dạng các thông số ẩn cho nguồn pin mặt trời ở
điều kiện vận hành tiêu chuẩn
2.2.1 Nêu vấn đề
Như đã phân tích trong mục 2.1, các phương trình (2.6) và (2.7) luôn luôn
đúng và sẽ tồn tại bộ thông số ẩn mới thỏa mãn các phương trình này tương ứng với
mỗi cấu trúc ghép. Giải pháp xác định bộ thông số ẩn cho mỗi cấu trúc ghép của
PVg trong luận án sẽ không quan tâm đến số lượng hay cách ghép song song, nối
tiếp từ các đơn vị thành phần mà chỉ quan tâm đến bộ các thông số đã biết tương
đương trên datasheet của cấu trúc đó.
Datasheet của một cấu trúc PVg bất kỳ sẽ cho biết giá trị các thông số được
kiểm nghiệm ở STC. Các thông số đã biết bao gồm Pmpp, Vmpp, Impp, VOC, ISC, hệ số
thay đổi dòng điện theo nhiệt độ CTI, hệ số thay đổi của điện áp theo nhiệt độ CTV,
hệ số thay đổi của công suất theo nhiệt độ CTP và đồ thị thể hiện mối quan hệ giữa
Pmpp với G khi T=Tstc. Khi PVg vận hành ở STC, các thông số đã biết sẽ tuân thủ
đúng theo các giá trị công bố của nhà sản xuất. Việc xác định giá trị của các thông
số ẩn là một yêu cầu quan trọng để thực hiện mô hình hóa, đánh giá phản ứng của
PVg khi thay đổi chế độ vận hành cũng như xây dựng các bài toán điều khiển.
Giải quyết bài toán xác định thông số ẩn của PVg ở STC chính là giải một hệ
phương trình phi tuyến với 5 ẩn số là RS, Rp, I0, Iph, Vt (n=1 ở STC) khi thành lập đủ
5 phương trình có chứa 5 ẩn này. Trên hình 2. 2, tồn tại 3 điểm đặc biệt trên đường
đặc tính vpv-ppv, vpv-ipv là điểm hở mạch, điểm ngắn mạch và MPP. Các phương
trình thiết lập được 3 điểm đặc biệt này đều dựa trên việc thỏa mãn (2.6) và (2.7)
hay điều kiện về độ dốc (đạo hàm riêng) tại các điểm đó.

-24-
2.2.2 Thiết lập các phương trình tại các điểm đặc biệt ở điều kiện tiêu chuẩn
2.2.2.1 Phương trình thiết lập tại điểm ngắn mạch
- Phương trình (2.8) được thiết lập tại điểm ngắn mạch bằng cách sử dụng điều
kiện cặp giá trị vpv=0, ipv=ISC luôn thỏa mãn (2.6) [26], [27], [28], [29], [36], [52]:
p
SSC
t
SSC0phSC R
RI1V
RIexpIII −
−
−= (2.8)
- Phương trình (2.9) được thiết lập tại điểm ngắn mạch bằng cách sử dụng điều
kiện về độ dốc (đạo hàm của ipv theo vpv) như mô tả trên hình 2. 4 [26], [27], [28],
[29], [36], [44], [52]:
Hình 2. 4 Độ dốc đường tiếp tuyến tại điểm ngắn mạch của đường đặc tính vpv-ipv
pv
pv SC
pv
v 0pv pi I
di 1 0dv R=
=
+ = (2.9)
Thực hiện đạo hàm hai vế (2.6) theo biến vpv có (2.10):
p
S
t
Spvpv
t
S0
pt
Spvpv
t
0
pv
pv
RR
VRiv
expVRI1
R1
VRiv
expVI
dvdi
+
++
+
+
−= (2.10)
Thay cặp giá trị vpv=0, ipv=ISC vào (2.10) và kết hợp với (2.9) có (2.11):
0RR
VRIexp1
RR
VI
2p
S
t
SSC
p
S
t
0 =+
− (2.11)
i
v
(VOC, 0)
(0, ISC) Độ dốc= p
1R
− Rp=∞, RS=0
Rp≠∞
p
VIR
∆ =
-25-
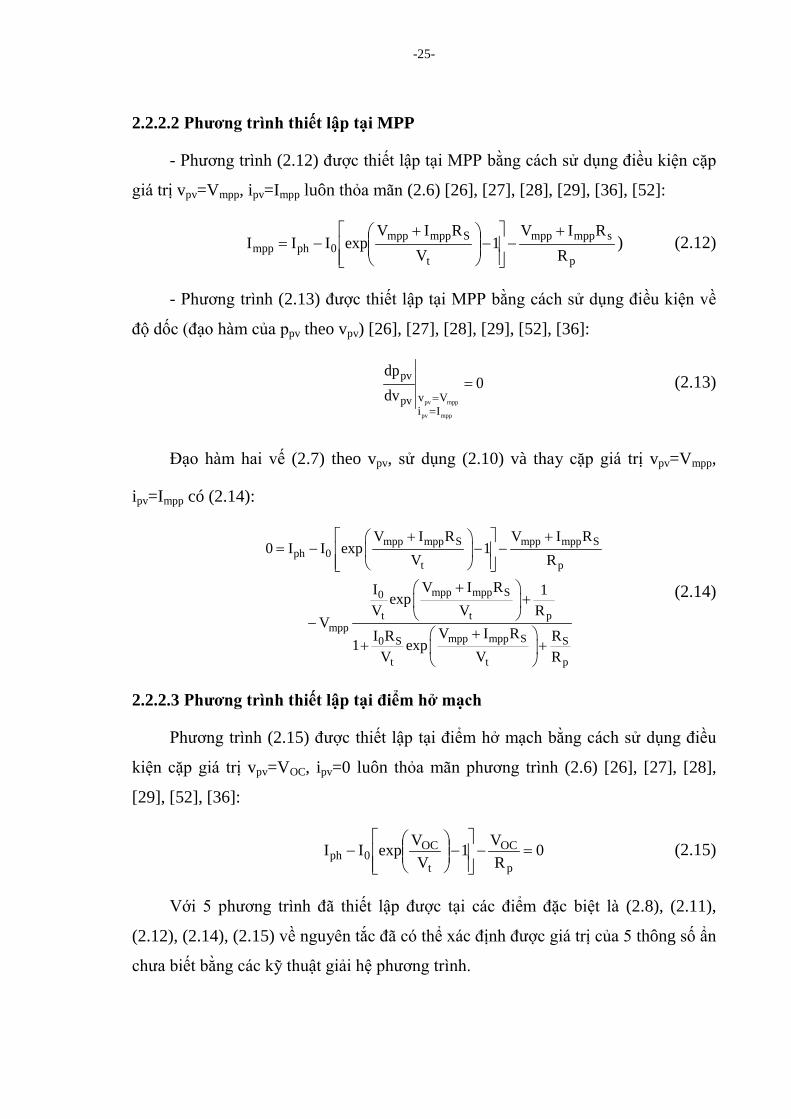
2.2.2.2 Phương trình thiết lập tại MPP
- Phương trình (2.12) được thiết lập tại MPP bằng cách sử dụng điều kiện cặp
giá trị vpv=Vmpp, ipv=Impp luôn thỏa mãn (2.6) [26], [27], [28], [29], [36], [52]:
p
smppmpp
t
Smppmpp0phmpp R
RIV1
VRIV
expIII+
−
−
+−= ) (2.12)
- Phương trình (2.13) được thiết lập tại MPP bằng cách sử dụng điều kiện về
độ dốc (đạo hàm của ppv theo vpv) [26], [27], [28], [29], [52], [36]:
0dvdp
mpppv
mpppvIiVvpv
pv =
==
(2.13)
Đạo hàm hai vế (2.7) theo vpv, sử dụng (2.10) và thay cặp giá trị vpv=Vmpp,
ipv=Impp có (2.14):
mpp mpp S mpp mpp Sph 0
t p
mpp mpp S0
t t pmpp
mpp mpp S0 S S
t t p
V I R V I R0 I I exp 1
V R
V I RI 1expV V R
VV I RI R R1 exp
V V R
+ + = − − −
+
+ −
+ + +
(2.14)
2.2.2.3 Phương trình thiết lập tại điểm hở mạch
Phương trình (2.15) được thiết lập tại điểm hở mạch bằng cách sử dụng điều
kiện cặp giá trị vpv=VOC, ipv=0 luôn thỏa mãn phương trình (2.6) [26], [27], [28],
[29], [52], [36]:
0R
V1V
VexpIIp
OC
t
OC0ph =−
−
− (2.15)
Với 5 phương trình đã thiết lập được tại các điểm đặc biệt là (2.8), (2.11),
(2.12), (2.14), (2.15) về nguyên tắc đã có thể xác định được giá trị của 5 thông số ẩn
chưa biết bằng các kỹ thuật giải hệ phương trình.

-26-
2.2.3 Phương pháp xác định các thông số ẩn
Do tính chất phức tạp của hệ phương trình thiết lập từ các phương trình (2.8),
(2.11), (2.12), (2.14), (2.15) nên cần phải xây dựng cách xác định giá trị các thông
số ẩn một cách chung nhất và giảm được khối lượng tính toán.
Bài toán tìm nghiệm của hệ phương trình phi tuyến đa ẩn nói chung thường
được xác định theo phương pháp lặp như Gauss-Seidel hoặc Newton-Raphson.
Trong đó, phương pháp Newton-Raphson có thể khắc phục các nhược điểm của
phương pháp Gauss-Seidel về tính chính xác và tốc độ hội tụ nhờ việc xác định các
vector tiếp tuyến (đạo hàm riêng) nên phương pháp Newton-Raphson được đề xuất
sử dụng để xác định giá trị của các thông số ẩn cho PVg bất kỳ.
Xét hàm số y=F(X). Tập các biến và giá trị tương ứng của hàm số được xác
định như sau:
=
k
2
1
x...xx
X và
=
)x,...,x,x(F...
)x,...,x,x(F)x,...,x,x(F
)X(F
k21k
k212
k211
trong đó, k∈N* là số lượng biến và hàm trong hệ phương trình.
Tại một điểm nào đó gần với nghiệm thực của phương trình F(X)=0, kẻ một
tiếp tuyến với đồ thị hàm số thì đường thẳng này cắt trục hoành tại một điểm nào đó
gần với nghiệm thực của phương trình hơn so với điểm ban đầu đã lựa chọn. Như
vậy, bằng cách tìm tiếp tuyến của đường cong y=F(X) tại một điểm lân cận của
nghiệm, ta có thể lặp các bước tính để tiến sát tới nghiệm thực của phương trình.
Hình 2. 5 mô tả quá trình lặp tiến dần về nghiệm thực của F(X)=0.
Hình 2. 5 Phương pháp Newton-Raphson
X(0) X(1) X(2) 0
F(X) F(X(0))
F(X(1))
F(X(2))
Nghiệm thực
X

-27-
Trong đó: X(0) là nghiệm khởi tạo ban đầu,
X(1), X(2),... là các nghiệm tìm được ở các bước dò.
Tổng quát hóa các bước tìm nghiệm trên hình 2. 5 ta có nghiệm thứ (i+1) được
xác định từ nghiệm thứ (i) theo (2.16) [51], [84], [91], [101]:
(i 1) (i) 1 (i)X X J F(X )+ −= − (2.16)
trong đó:
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
k
k
2
k
1
k
k
2
2
2
1
2k
1
2
1
1
1
xF...
xF
xF
............xF...
xF
xF
xF...
xF
xF
J là ma trận Jacobi (ma trận đạo hàm riêng),
1J− là nghịch đảo của ma trận Jacobi.
Để bài toán tìm nghiệm của hệ phương trình chắc chắn hội tụ và tốc độ hội tụ
nhanh, cần phải lựa chọn các giá trị của điểm khởi đầu X(0) sao cho gần với nghiệm
thực và J-1≠0 [84].
2.2.4 Xây dựng thuật toán xác định các thông số ẩn
Áp dụng cho bài toán xác định thông số ẩn ở STC, các giá trị cần xác định
(các biến) và các thông số đã biết được ký hiệu lại cho phù hợp với quy ước ký hiệu
của phương pháp Newton-Raphson như sau:
=
=
p
S
t
0
ph
5
4
3
2
1
RRVI
I
xxxxx
X và
=
=
mpp
mpp
OC
SC
4
3
2
1
I
VVI
aaaa
A
Viết lại các phương trình (2.8), (2.11), (2.12), (2.14), (2.15) sau khi thay các
biến và thông số ta có hệ phương trình sau:

-28-
3 4 4 3 4 41 1 2 2 4
3 5
a a x a a xF x x exp x a 0x x
+ += − + − − =
1 4 1 42 1 2 2 1
3 5
a x a xF x x exp x a 0x x
= − + − − =
2 23 2 2 1
3 5
a aF x exp x x 0x x
= + − − =
3 4 42
3 3 53 4 4 3 4 44 1 2 3
3 5 3 4 42 4 4
3 3 5
a a xx 1expx x xa a x a a xF x x exp 1 a 0
x x a a xx x x1 expx x x
++ + + = − − − − = + + +
2 4 1 4 45 2
3 5 3 5
x x a x xF 1 exp 0x x x x
= − + =
Ma trận đạo hàm riêng Jacobian:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
5
5
4
5
3
5
2
5
1
5
5
4
4
4
3
4
2
4
1
4
5
3
4
3
33
3
2
3
1
3
5
2
4
2
3
2
2
2
1
2
5
1
4
1
3
1
2
1
1
1
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
xxF
J
Nội dung thuật toán Newton-Raphson áp dụng xác định các thông số ẩn của
PVg được mô tả trên hình 2. 6.
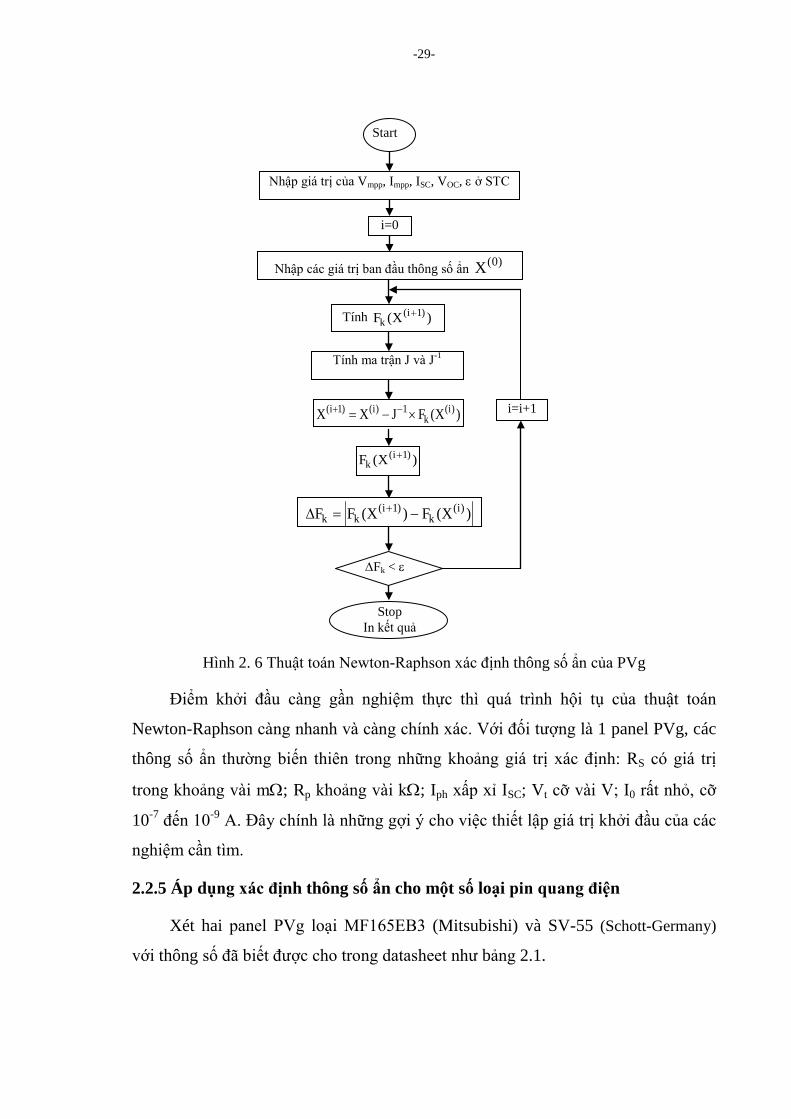
-29-
Hình 2. 6 Thuật toán Newton-Raphson xác định thông số ẩn của PVg
Điểm khởi đầu càng gần nghiệm thực thì quá trình hội tụ của thuật toán
Newton-Raphson càng nhanh và càng chính xác. Với đối tượng là 1 panel PVg, các
thông số ẩn thường biến thiên trong những khoảng giá trị xác định: RS có giá trị
trong khoảng vài mΩ; Rp khoảng vài kΩ; Iph xấp xỉ ISC; Vt cỡ vài V; I0 rất nhỏ, cỡ
10-7 đến 10-9 A. Đây chính là những gợi ý cho việc thiết lập giá trị khởi đầu của các
nghiệm cần tìm.
2.2.5 Áp dụng xác định thông số ẩn cho một số loại pin quang điện
Xét hai panel PVg loại MF165EB3 (Mitsubishi) và SV-55 (Schott-Germany)
với thông số đã biết được cho trong datasheet như bảng 2.1.
Nhập giá trị của Vmpp, Impp, ISC, VOC, ε ở STC
i=0
Nhập các giá trị ban đầu thông số ẩn )0(X
Tính )X(F )1i(k
+
Tính ma trận J và J-1
(i 1) (i) 1 (i)kX X J F (X )+ −= − ×
)X(F )1i(k
+
)X(F)X(FF )i(k
)1i(kk −=∆ +
Stop In kết quả
∆Fk < ε
Start
i=i+1
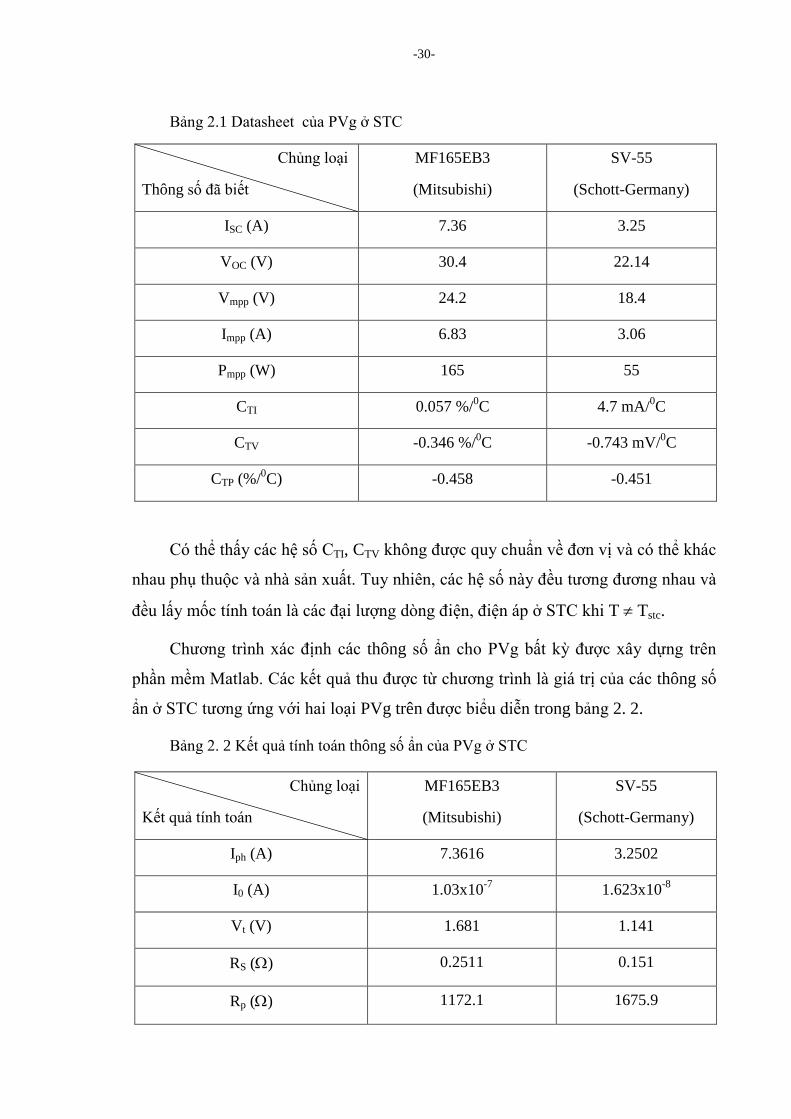
-30-
Bảng 2.1 Datasheet của PVg ở STC
Chủng loại
Thông số đã biết
MF165EB3
(Mitsubishi)
SV-55
(Schott-Germany)
ISC (A) 7.36 3.25
VOC (V) 30.4 22.14
Vmpp (V) 24.2 18.4
Impp (A) 6.83 3.06
Pmpp (W) 165 55
CTI 0.057 %/0C 4.7 mA/0C
CTV -0.346 %/0C -0.743 mV/0C
CTP (%/0C) -0.458 -0.451
Có thể thấy các hệ số CTI, CTV không được quy chuẩn về đơn vị và có thể khác
nhau phụ thuộc và nhà sản xuất. Tuy nhiên, các hệ số này đều tương đương nhau và
đều lấy mốc tính toán là các đại lượng dòng điện, điện áp ở STC khi T ≠ Tstc.
Chương trình xác định các thông số ẩn cho PVg bất kỳ được xây dựng trên
phần mềm Matlab. Các kết quả thu được từ chương trình là giá trị của các thông số
ẩn ở STC tương ứng với hai loại PVg trên được biểu diễn trong bảng 2. 2.
Bảng 2. 2 Kết quả tính toán thông số ẩn của PVg ở STC
Chủng loại
Kết quả tính toán
MF165EB3
(Mitsubishi)
SV-55
(Schott-Germany)
Iph (A) 7.3616 3.2502
I0 (A) 1.03x10-7 1.623x10-8
Vt (V) 1.681 1.141
RS (Ω) 0.2511 0.151
Rp (Ω) 1172.1 1675.9
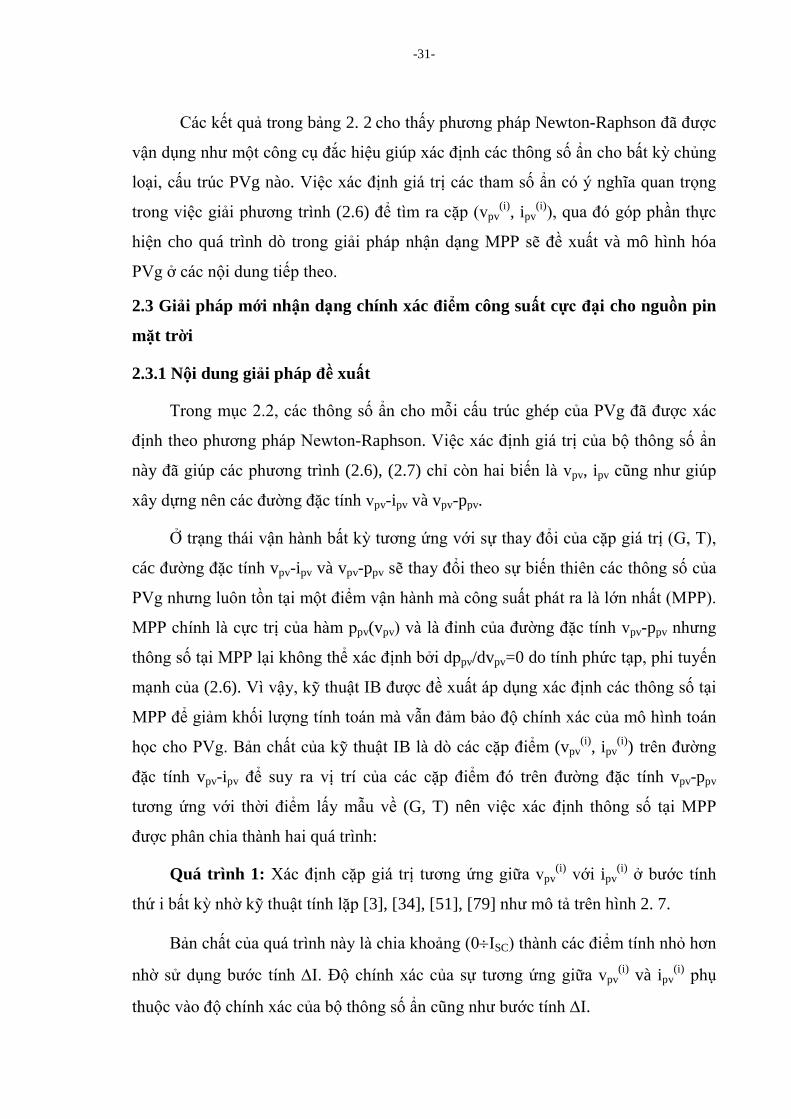
-31-
Các kết quả trong bảng 2. 2 cho thấy phương pháp Newton-Raphson đã được
vận dụng như một công cụ đắc hiệu giúp xác định các thông số ẩn cho bất kỳ chủng
loại, cấu trúc PVg nào. Việc xác định giá trị các tham số ẩn có ý nghĩa quan trọng
trong việc giải phương trình (2.6) để tìm ra cặp (vpv(i), ipv
(i)), qua đó góp phần thực
hiện cho quá trình dò trong giải pháp nhận dạng MPP sẽ đề xuất và mô hình hóa
PVg ở các nội dung tiếp theo.
2.3 Giải pháp mới nhận dạng chính xác điểm công suất cực đại cho nguồn pin
mặt trời
2.3.1 Nội dung giải pháp đề xuất
Trong mục 2.2, các thông số ẩn cho mỗi cấu trúc ghép của PVg đã được xác
định theo phương pháp Newton-Raphson. Việc xác định giá trị của bộ thông số ẩn
này đã giúp các phương trình (2.6), (2.7) chỉ còn hai biến là vpv, ipv cũng như giúp
xây dựng nên các đường đặc tính vpv-ipv và vpv-ppv.
Ở trạng thái vận hành bất kỳ tương ứng với sự thay đổi của cặp giá trị (G, T),
các đường đặc tính vpv-ipv và vpv-ppv sẽ thay đổi theo sự biến thiên các thông số của
PVg nhưng luôn tồn tại một điểm vận hành mà công suất phát ra là lớn nhất (MPP).
MPP chính là cực trị của hàm ppv(vpv) và là đỉnh của đường đặc tính vpv-ppv nhưng
thông số tại MPP lại không thể xác định bởi dppv/dvpv=0 do tính phức tạp, phi tuyến
mạnh của (2.6). Vì vậy, kỹ thuật IB được đề xuất áp dụng xác định các thông số tại
MPP để giảm khối lượng tính toán mà vẫn đảm bảo độ chính xác của mô hình toán
học cho PVg. Bản chất của kỹ thuật IB là dò các cặp điểm (vpv(i), ipv
(i)) trên đường
đặc tính vpv-ipv để suy ra vị trí của các cặp điểm đó trên đường đặc tính vpv-ppv
tương ứng với thời điểm lấy mẫu về (G, T) nên việc xác định thông số tại MPP
được phân chia thành hai quá trình:
Quá trình 1: Xác định cặp giá trị tương ứng giữa vpv(i) với ipv
(i) ở bước tính
thứ i bất kỳ nhờ kỹ thuật tính lặp [3], [34], [51], [79] như mô tả trên hình 2. 7.
Bản chất của quá trình này là chia khoảng (0÷ISC) thành các điểm tính nhỏ hơn
nhờ sử dụng bước tính ∆I. Độ chính xác của sự tương ứng giữa vpv(i) và ipv
(i) phụ
thuộc vào độ chính xác của bộ thông số ẩn cũng như bước tính ∆I.
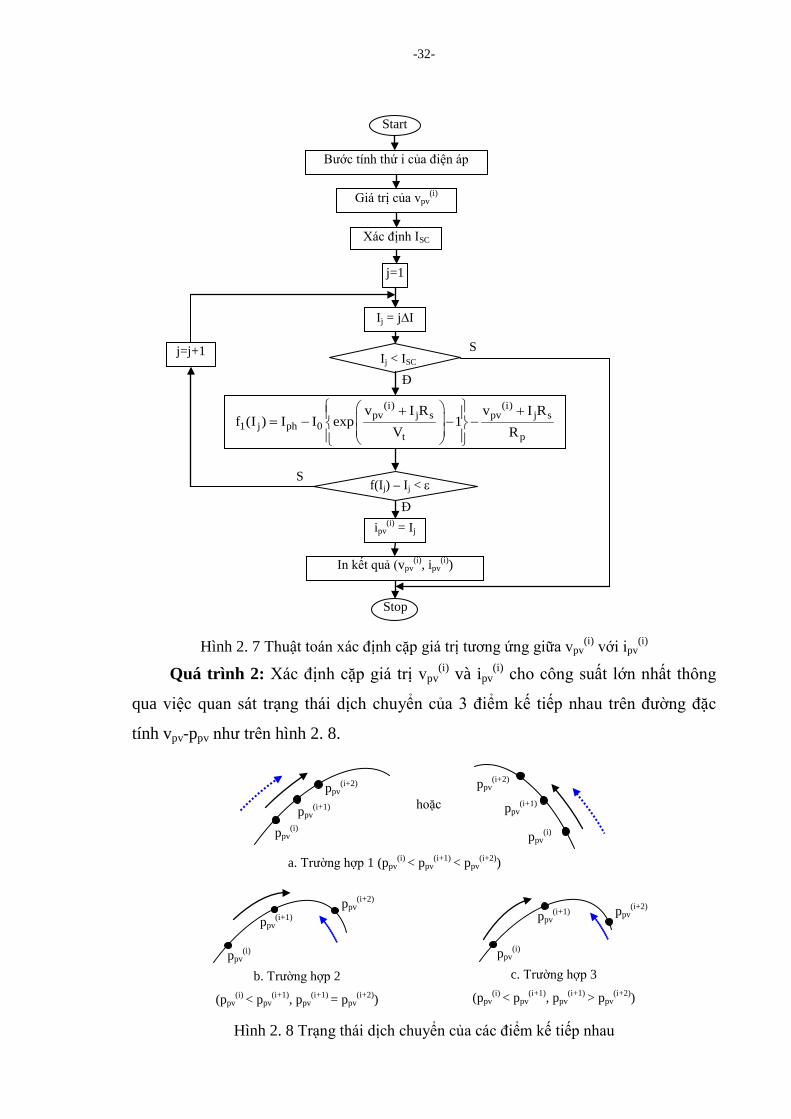
-32-
Hình 2. 7 Thuật toán xác định cặp giá trị tương ứng giữa vpv(i) với ipv
(i)
Quá trình 2: Xác định cặp giá trị vpv(i) và ipv
(i) cho công suất lớn nhất thông
qua việc quan sát trạng thái dịch chuyển của 3 điểm kế tiếp nhau trên đường đặc
tính vpv-ppv như trên hình 2. 8.
Hình 2. 8 Trạng thái dịch chuyển của các điểm kế tiếp nhau
Start
Xác định ISC
Bước tính thứ i của điện áp
Giá trị của vpv(i)
j=1
Ij = j∆I
(i) (i)pv j s pv j s
1 j ph 0t p
v I R v I Rf (I ) I I exp 1
V R
+ + = − − −
f(Ij) – Ij < ε
ipv(i) = Ij
Ij < ISC
Đ
S
Đ
j=j+1
Stop
In kết quả (vpv(i), ipv
(i))
S
ppv(i)
ppv(i+1)
ppv(i+2)
a. Trường hợp 1 (ppv(i)
< ppv(i+1)
< ppv(i+2))
ppv(i)
ppv(i+1)
ppv(i+2)
hoặc
ppv(i)
ppv(i+1)
ppv(i+2)
b. Trường hợp 2
(ppv(i) < ppv
(i+1), ppv(i+1) = ppv
(i+2))
ppv(i)
ppv(i+1)
ppv
(i+2)
c. Trường hợp 3
(ppv(i) < ppv
(i+1), ppv(i+1) > ppv
(i+2))

-33-
Trong đó:
mũi tên nét liền để chỉ trạng thái dịch chuyển của các điểm hiện thời,
mũi tên nét đứt để chỉ trạng thái cần dịch chuyển của điểm kế tiếp.
Vấn đề ở đây là cần phải có cách cung cấp thông tin về giá trị của vpv(i), vpv
(i+1),
vpv(i+2) để số lượng bước tính là nhỏ nhất mà vẫn đảm bảo độ chính xác. Theo kỹ
thuật chia đôi, điện áp của bước kế tiếp sẽ tăng nhờ đưa vào bước nhảy điện áp ∆V
ở giai đoạn tiến thông thường và giảm 1 nửa ∆V ở giai đoạn chia đôi như mô tả trên
hình 2. 9 [3], [34], [51], [79].
Hình 2. 9 Quá trình dò tìm MPP trên đường đặc tính vpv-ppv
Kết hợp quá trình 1 và quá trình 2, thuật toán sử dụng kỹ thuật IB mô tả trên
hình 2. 10 được đề xuất để xác định giá trị các thông số tại MPP.
Với việc sử dụng kỹ thuật IB, số bước lặp đã giảm đáng kể. Không nên chọn
∆V lớn vì có thể vượt quá VOC khi thực hiện tăng V. Kinh nghiệm cho thấy nên
chọn ∆V< (VOC – Vmpp) thì chắc chắn chương trình sẽ hội tụ.
Giai đoạn chia đôi
p
v
∆V ∆V/2
2 1
Giai đoạn tiến thông thường
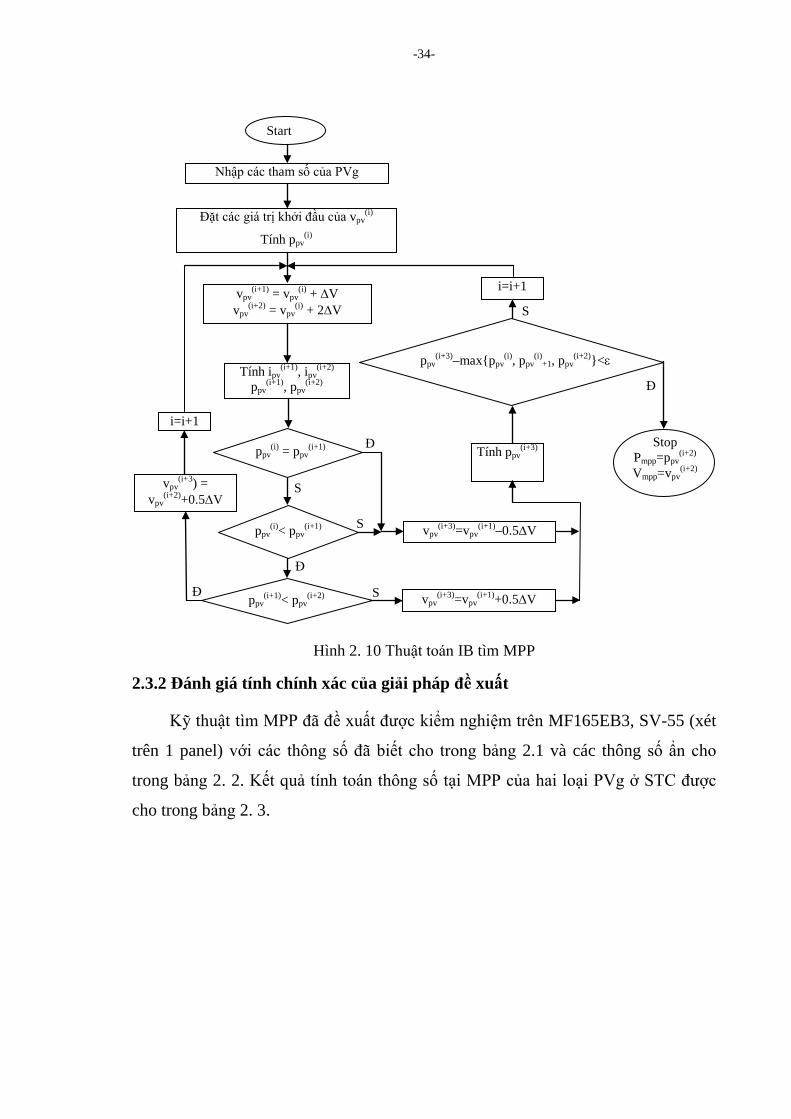
-34-
Hình 2. 10 Thuật toán IB tìm MPP
2.3.2 Đánh giá tính chính xác của giải pháp đề xuất
Kỹ thuật tìm MPP đã đề xuất được kiểm nghiệm trên MF165EB3, SV-55 (xét
trên 1 panel) với các thông số đã biết cho trong bảng 2.1 và các thông số ẩn cho
trong bảng 2. 2. Kết quả tính toán thông số tại MPP của hai loại PVg ở STC được
cho trong bảng 2. 3.
Start
Đặt các giá trị khởi đầu của vpv(i)
Tính ppv(i)
vpv(i+1) = vpv
(i) + ∆V vpv
(i+2) = vpv(i) + 2∆V
Nhập các tham số của PVg
Tính ipv(i+1), ipv
(i+2) ppv
(i+1), ppv(i+2)
ppv(i) = ppv
(i+1)
ppv(i)< ppv
(i+1)
ppv(i+1)< ppv
(i+2)
Đ
S
Đ
S
Đ S
ppv(i+3)–maxppv
(i), ppv(i)
+1, ppv(i+2)<ε
Stop Pmpp=ppv
(i+2) Vmpp=vpv
(i+2)
i=i+1
i=i+1
Đ
S
vpv(i+3)=vpv
(i+1)–0.5∆V
vpv(i+3)=vpv
(i+1)+0.5∆V
vpv(i+3) =
vpv(i+2)+0.5∆V
Tính ppv(i+3)
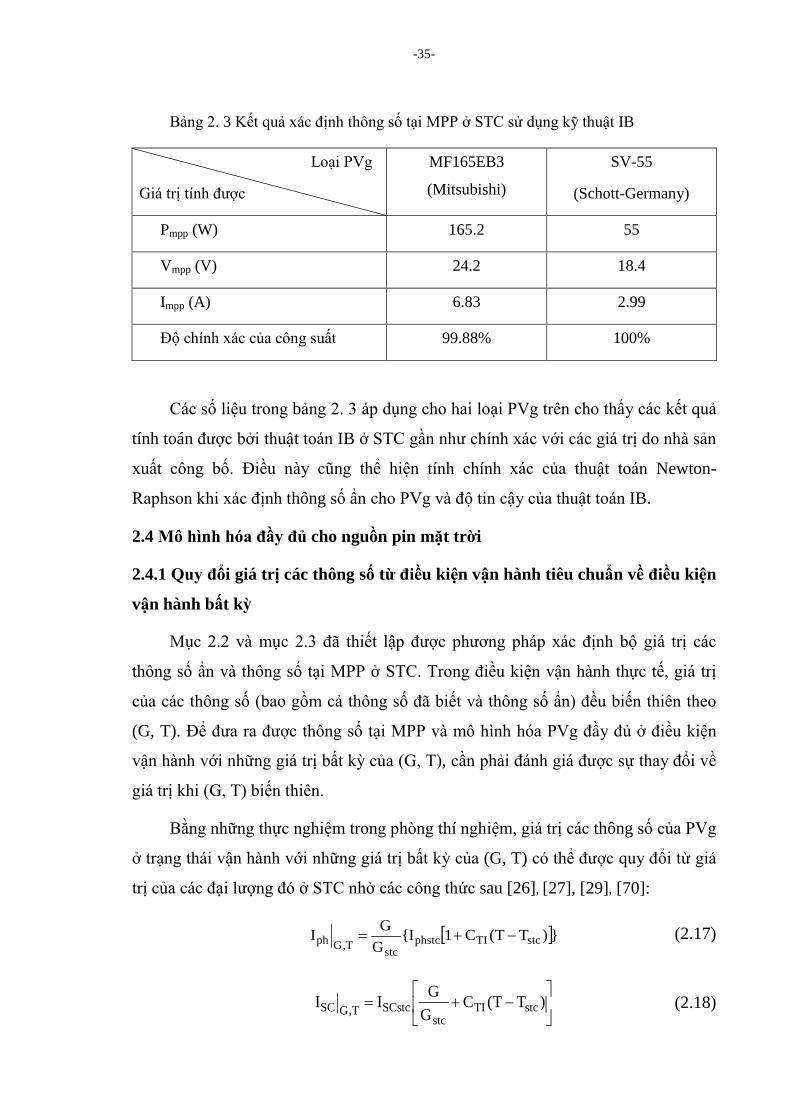
-35-
Bảng 2. 3 Kết quả xác định thông số tại MPP ở STC sử dụng kỹ thuật IB
Loại PVg
Giá trị tính được
MF165EB3
(Mitsubishi)
SV-55
(Schott-Germany)
Pmpp (W) 165.2 55
Vmpp (V) 24.2 18.4
Impp (A) 6.83 2.99
Độ chính xác của công suất 99.88% 100%
Các số liệu trong bảng 2. 3 áp dụng cho hai loại PVg trên cho thấy các kết quả
tính toán được bởi thuật toán IB ở STC gần như chính xác với các giá trị do nhà sản
xuất công bố. Điều này cũng thể hiện tính chính xác của thuật toán Newton-
Raphson khi xác định thông số ẩn cho PVg và độ tin cậy của thuật toán IB.
2.4 Mô hình hóa đầy đủ cho nguồn pin mặt trời
2.4.1 Quy đổi giá trị các thông số từ điều kiện vận hành tiêu chuẩn về điều kiện
vận hành bất kỳ
Mục 2.2 và mục 2.3 đã thiết lập được phương pháp xác định bộ giá trị các
thông số ẩn và thông số tại MPP ở STC. Trong điều kiện vận hành thực tế, giá trị
của các thông số (bao gồm cả thông số đã biết và thông số ẩn) đều biến thiên theo
(G, T). Để đưa ra được thông số tại MPP và mô hình hóa PVg đầy đủ ở điều kiện
vận hành với những giá trị bất kỳ của (G, T), cần phải đánh giá được sự thay đổi về
giá trị khi (G, T) biến thiên.
Bằng những thực nghiệm trong phòng thí nghiệm, giá trị các thông số của PVg
ở trạng thái vận hành với những giá trị bất kỳ của (G, T) có thể được quy đổi từ giá
trị của các đại lượng đó ở STC nhờ các công thức sau [26], [27], [29], [70]:
[ ])TT(C1IGGI stcTIphstcstcT,Gph −+= (2.17)
−+= )TT(C
GGII stcTIstc
SCstcT,GSC (2.18)
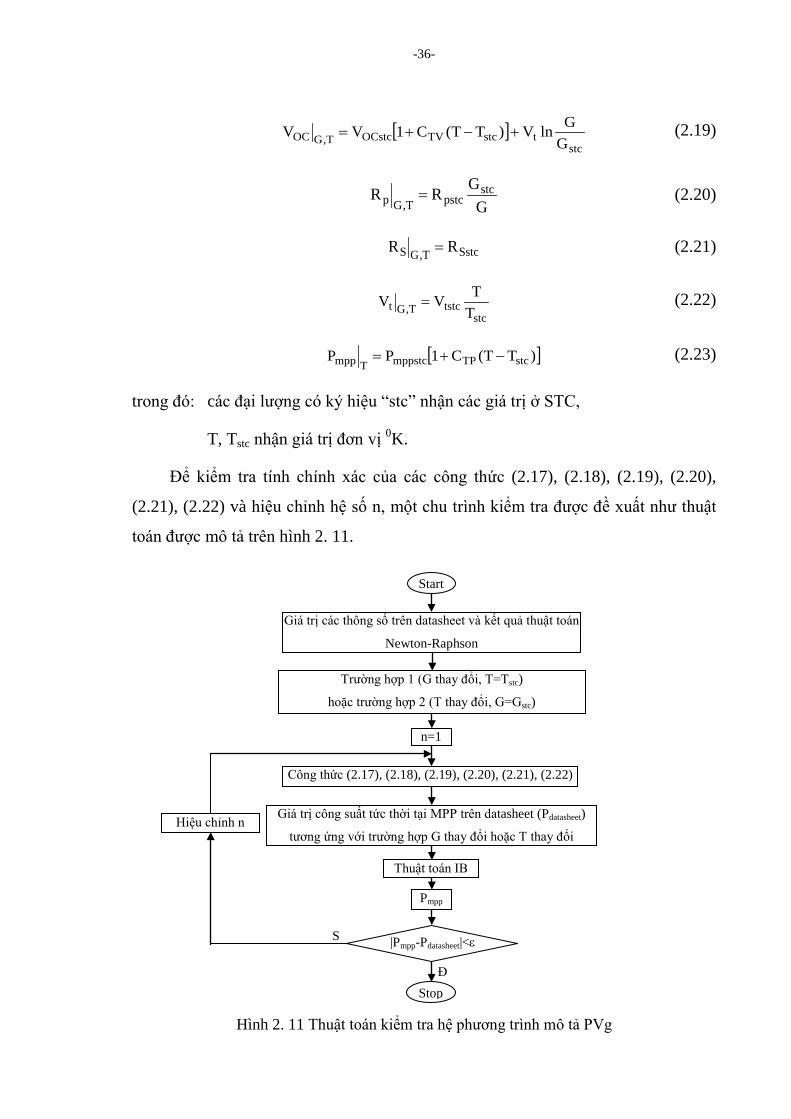
-36-
[ ]stc
tstcTVOCstcT,GOC GGlnV)TT(C1VV +−+= (2.19)
G
GRR stcpstcT,Gp = (2.20)
SstcT,GS RR = (2.21)
stc
tstcT,Gt TTVV = (2.22)
[ ])TT(C1PP stcTPmppstcTmpp −+= (2.23)
trong đó: các đại lượng có ký hiệu “stc” nhận các giá trị ở STC,
T, Tstc nhận giá trị đơn vị 0K.
Để kiểm tra tính chính xác của các công thức (2.17), (2.18), (2.19), (2.20),
(2.21), (2.22) và hiệu chỉnh hệ số n, một chu trình kiểm tra được đề xuất như thuật
toán được mô tả trên hình 2. 11.
Hình 2. 11 Thuật toán kiểm tra hệ phương trình mô tả PVg
Start
Giá trị các thông số trên datasheet và kết quả thuật toán
Newton-Raphson
Trường hợp 1 (G thay đổi, T=Tstc)
hoặc trường hợp 2 (T thay đổi, G=Gstc)
Công thức (2.17), (2.18), (2.19), (2.20), (2.21), (2.22)
Thuật toán IB
n=1
Pmpp
|Pmpp-Pdatasheet|<ε
Hiệu chỉnh n Giá trị công suất tức thời tại MPP trên datasheet (Pdatasheet)
tương ứng với trường hợp G thay đổi hoặc T thay đổi
Đ
S
Stop

-37-
Bước khởi đầu xét với n=1, kết quả thu được tương ứng với trường hợp 1
được cho trong bảng 2. 4 và tương ứng với trường hợp 2 được cho trong bảng 2. 5.
Bảng 2. 4 Kiểm tra giá trị của Pmpp khi G thay đổi, T=Tstc
Chủng loại
PVg
G (W/m2)
Pmpp (W) 1000 800 600 400 200
MF165EB3 Tính toán 165.2 132 98.4 64.6 31.1
Datasheet 165.2 131.83 98.13 64.43 30.9
SV-55 Tính toán 55 43.7 32.5 21.4 10.1
Datasheet 55 43.8 32.6 21.4 10.2
Bảng 2. 5 Kiểm tra giá trị của Pmpp khi T thay đổi, G=Gstc
Chủng loại
PVg T (0C)
Pmpp (W) 25 35 45 55 65
MF165EB3 Tính toán 165.2 172.2 179.2 186.1 193.3
Datasheet 165.2 157.6 150.1 142.4 134.9
SV-55 Tính toán 55 57.4 59.5 61.55 63.74
Datasheet 55 52.4 50 47.6 45.1
Các kết quả trên bảng 2. 4 cho thấy khi sử dụng các công thức quy đổi từ
STC sang trạng thái có G biến thiên (T=Tstc) đã gần như chính xác với thông số của
nhà sản xuất. Mặt khác, các kết quả trong bảng 2. 5 cho thấy khi T tăng (G=Gstc),
Pmpp tính toán được tăng ngược chiều với thông số của nhà sản xuất. Điều này cho
thấy n phụ thuộc vào một biến duy nhất là T và biến thiên theo quy luật n giảm khi
T tăng. Một số giá trị của n dò được nhờ thuật toán IB cho thấy n không biến thiên
tuyến tính với T. Vì vậy, hàm số n(T) cần phải được xây dựng nhờ các công cụ toán
học.
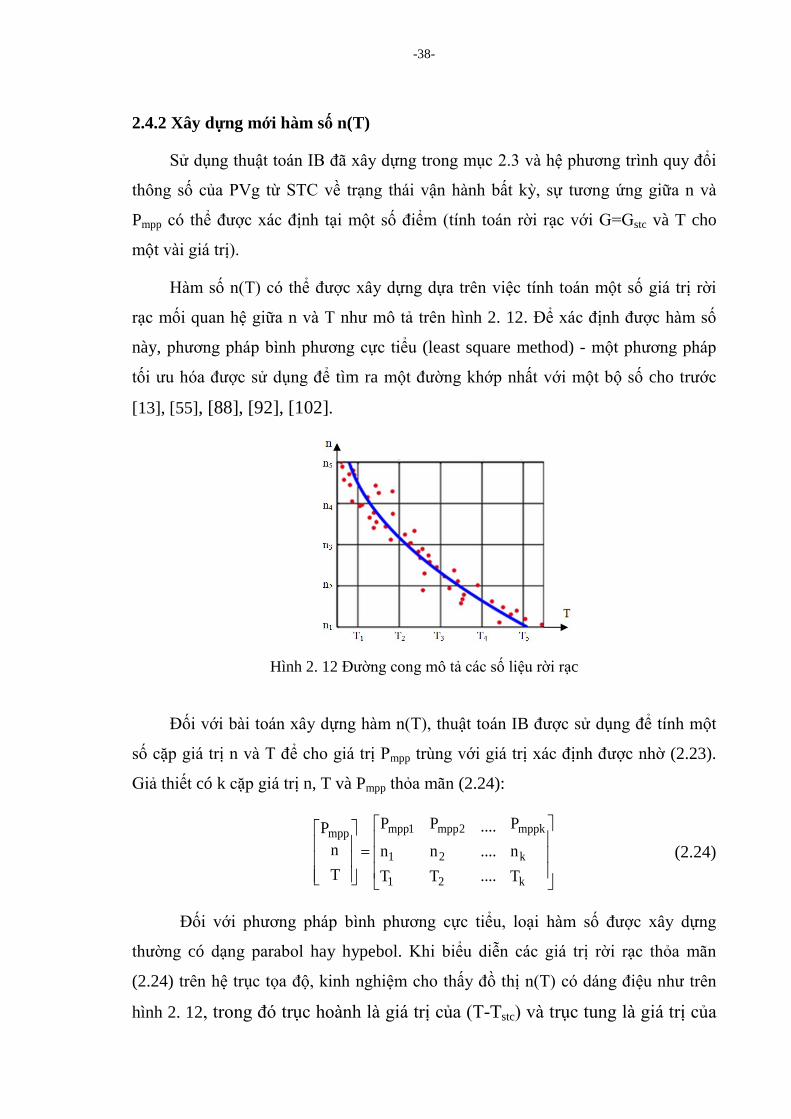
-38-
2.4.2 Xây dựng mới hàm số n(T)
Sử dụng thuật toán IB đã xây dựng trong mục 2.3 và hệ phương trình quy đổi
thông số của PVg từ STC về trạng thái vận hành bất kỳ, sự tương ứng giữa n và
Pmpp có thể được xác định tại một số điểm (tính toán rời rạc với G=Gstc và T cho
một vài giá trị).
Hàm số n(T) có thể được xây dựng dựa trên việc tính toán một số giá trị rời
rạc mối quan hệ giữa n và T như mô tả trên hình 2. 12. Để xác định được hàm số
này, phương pháp bình phương cực tiểu (least square method) - một phương pháp
tối ưu hóa được sử dụng để tìm ra một đường khớp nhất với một bộ số cho trước
[13], [55], [88], [92], [102].
Hình 2. 12 Đường cong mô tả các số liệu rời rạc
Đối với bài toán xây dựng hàm n(T), thuật toán IB được sử dụng để tính một
số cặp giá trị n và T để cho giá trị Pmpp trùng với giá trị xác định được nhờ (2.23).
Giả thiết có k cặp giá trị n, T và Pmpp thỏa mãn (2.24):
=
k
k
mppk
2
2
2mpp
1
1
1mppmpp
Tn
P
....
....
....
Tn
P
Tn
P
Tn
P (2.24)
Đối với phương pháp bình phương cực tiểu, loại hàm số được xây dựng
thường có dạng parabol hay hypebol. Khi biểu diễn các giá trị rời rạc thỏa mãn
(2.24) trên hệ trục tọa độ, kinh nghiệm cho thấy đồ thị n(T) có dáng điệu như trên
hình 2. 12, trong đó trục hoành là giá trị của (T-Tstc) và trục tung là giá trị của
-39-
n. Dáng điệu này cho thấy hàm số phù hợp nhất biểu diễn mối quan hệ giữa n và
T có dạng hàm số bậc 2 như mô tả bởi (2.25):
2cxbxan ++= (2.25)
trong đó: x= T - Tstc
Sai lệch giữa các giá trị của hàm số với giá trị mẫu được xác định theo (2.26):
−++=ε
−++=ε
−++=ε
k2kkk
22222
12111
ncxbxa
.........................ncxbxa
ncxbxa
(2.26)
Hàm mục tiêu theo phương pháp bình phương cực tiểu xác định bởi (2.27):
∑=
→ε++ε+ε=ε=k
1i
2k
22
21
2i min...)c,b,a(f (2.27)
Giá trị a, b, c sẽ thỏa mãn điều kiện (2.28), (2.29), (2.30):
0)ncxbxa(2....)ncxbxa(2af
k2kk1
211 =−++++−++=
∂∂ (2.28)
0)ncxbxa(x2....)ncxbxa(x2bf
k2kkk1
2111 =−++++−++=
∂∂ (2.29)
0)ncxbxa(x2....)ncxbxa(x2cf
k2kk
2k1
211
21 =−++++−++=
∂∂ (2.30)
Từ (2.28), (2.29), (2.30) ta lập được hệ phương trình (2.31):
++=++++++++
++=++++++++
++=++++++
2kk
211
4k
41
3k
31
2k
21
kk113k
31
2k
21k1
k12k
21k1
xn...xnc)x...x(b)x...x(a)x...x(
xn...xnc)x...x(b)x...x(a)x...x(
n...nc)x...x(b)x...x(ka
(2.31)
Các hệ số a, b, c của hàm số n(T) được xác định bởi hệ phương trình (2.31)
cho đối tượng PVg bất kỳ.
Cụ thể, hàm số n(T) áp dụng cho MF165EB3 có dạng (2.32) và cho SV-55 có
dạng (2.33):
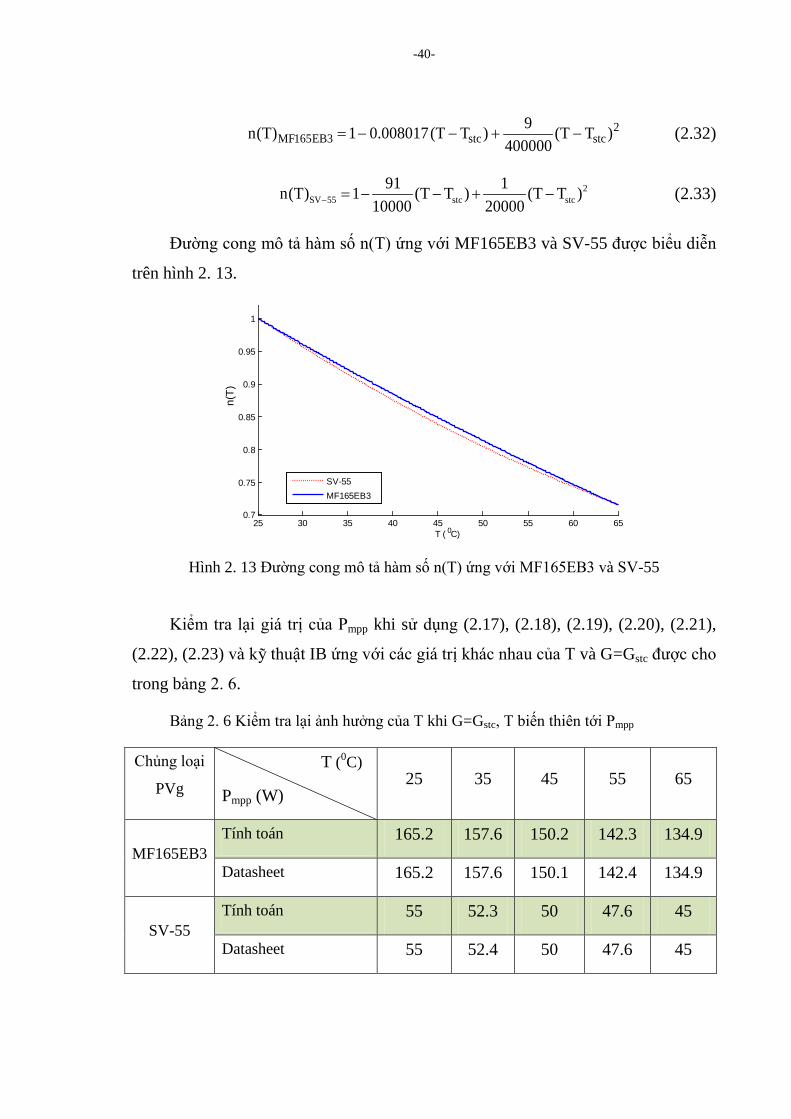
-40-
2stcstc3EB165MF )TT(
4000009)TT(008017.01)T(n −+−−= (2.32)
2SV 55 stc stc
91 1n(T) 1 (T T ) (T T )10000 20000− = − − + − (2.33)
Đường cong mô tả hàm số n(T) ứng với MF165EB3 và SV-55 được biểu diễn
trên hình 2. 13.
Hình 2. 13 Đường cong mô tả hàm số n(T) ứng với MF165EB3 và SV-55
Kiểm tra lại giá trị của Pmpp khi sử dụng (2.17), (2.18), (2.19), (2.20), (2.21),
(2.22), (2.23) và kỹ thuật IB ứng với các giá trị khác nhau của T và G=Gstc được cho
trong bảng 2. 6.
Bảng 2. 6 Kiểm tra lại ảnh hưởng của T khi G=Gstc, T biến thiên tới Pmpp
Chủng loại
PVg T (0C)
Pmpp (W) 25 35 45 55 65
MF165EB3 Tính toán 165.2 157.6 150.2 142.3 134.9
Datasheet 165.2 157.6 150.1 142.4 134.9
SV-55 Tính toán 55 52.3 50 47.6 45
Datasheet 55 52.4 50 47.6 45
25 30 35 40 45 50 55 60 650.7
0.75
0.8
0.85
0.9
0.95
1
T ( C)
n(T)
SV-55MF165EB3
0
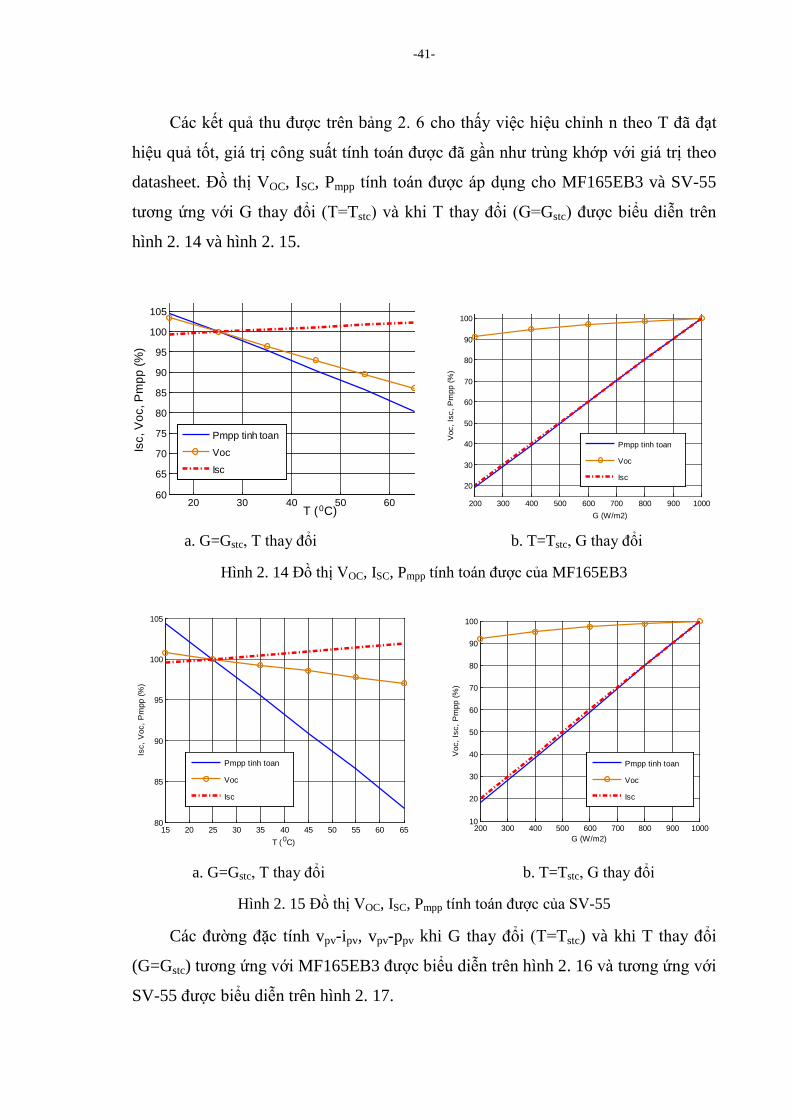
-41-
Các kết quả thu được trên bảng 2. 6 cho thấy việc hiệu chỉnh n theo T đã đạt
hiệu quả tốt, giá trị công suất tính toán được đã gần như trùng khớp với giá trị theo
datasheet. Đồ thị VOC, ISC, Pmpp tính toán được áp dụng cho MF165EB3 và SV-55
tương ứng với G thay đổi (T=Tstc) và khi T thay đổi (G=Gstc) được biểu diễn trên
hình 2. 14 và hình 2. 15.
a. G=Gstc, T thay đổi b. T=Tstc, G thay đổi
Hình 2. 14 Đồ thị VOC, ISC, Pmpp tính toán được của MF165EB3
a. G=Gstc, T thay đổi b. T=Tstc, G thay đổi
Hình 2. 15 Đồ thị VOC, ISC, Pmpp tính toán được của SV-55
Các đường đặc tính vpv-ipv, vpv-ppv khi G thay đổi (T=Tstc) và khi T thay đổi
(G=Gstc) tương ứng với MF165EB3 được biểu diễn trên hình 2. 16 và tương ứng với
SV-55 được biểu diễn trên hình 2. 17.
20 30 40 50 6060
65
70
75
80
85
90
95
100
105
T ( C)
Isc,
Voc
, Pm
pp (%
)
Pmpp tinh toan
Voc
Isc
0 200 300 400 500 600 700 800 900 1000
20
30
40
50
60
70
80
90
100
G (W/m2)
Voc
, Isc
, Pm
pp (%
)
Pmpp tinh toan
Voc
Isc
15 20 25 30 35 40 45 50 55 60 6580
85
90
95
100
105
T ( C)
Isc,
Voc
, Pm
pp (%
)
Pmpp tinh toan
Voc
Isc
0200 300 400 500 600 700 800 900 1000
10
20
30
40
50
60
70
80
90
100
G (W/m2)
Voc
, Isc
, Pm
pp (%
)
Pmpp tinh toan
Voc
Isc
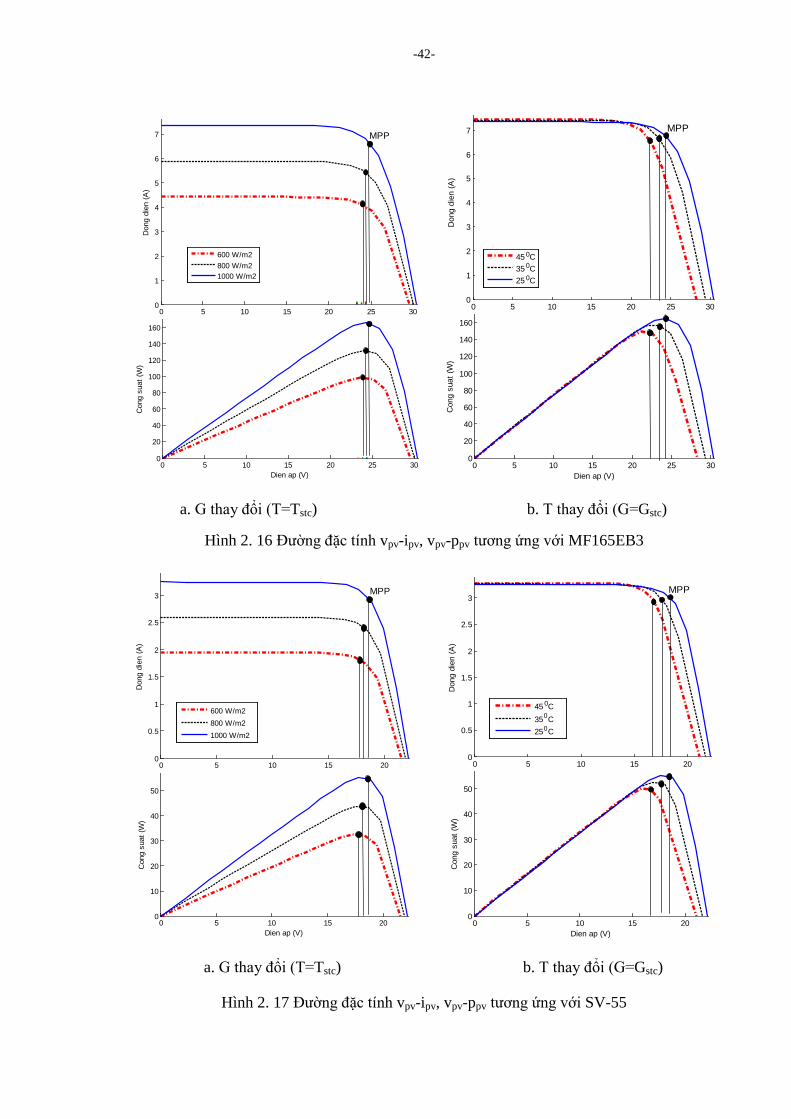
-42-
a. G thay đổi (T=Tstc) b. T thay đổi (G=Gstc)
Hình 2. 16 Đường đặc tính vpv-ipv, vpv-ppv tương ứng với MF165EB3
a. G thay đổi (T=Tstc) b. T thay đổi (G=Gstc)
Hình 2. 17 Đường đặc tính vpv-ipv, vpv-ppv tương ứng với SV-55
0 5 10 15 20 25 300
1
2
3
4
5
6
7D
ong
dien
(A)
0 5 10 15 20 25 300
20
40
60
80
100
120
140
160
Dien ap (V)
Con
g su
at (W
)
600 W/m2800 W/m21000 W/m2
MPP
0 5 10 15 20 25 300
1
2
3
4
5
6
7
Don
g di
en (A
)
0 5 10 15 20 25 300
20
40
60
80
100
120
140
160
Dien ap (V)
Con
g su
at (W
)
45 C35 C25 C
MPP
0
00
0 5 10 15 200
0.5
1
1.5
2
2.5
3
Don
g di
en (A
)
0 5 10 15 200
10
20
30
40
50
Dien ap (V)
Con
g su
at (W
)
600 W/m2800 W/m21000 W/m2
MPP
0 5 10 15 200
0.5
1
1.5
2
2.5
3
Don
g di
en (A
)
0 5 10 15 200
10
20
30
40
50
Dien ap (V)
Con
g su
at (W
)
45 C35 C25 C
0
0
0
MPP
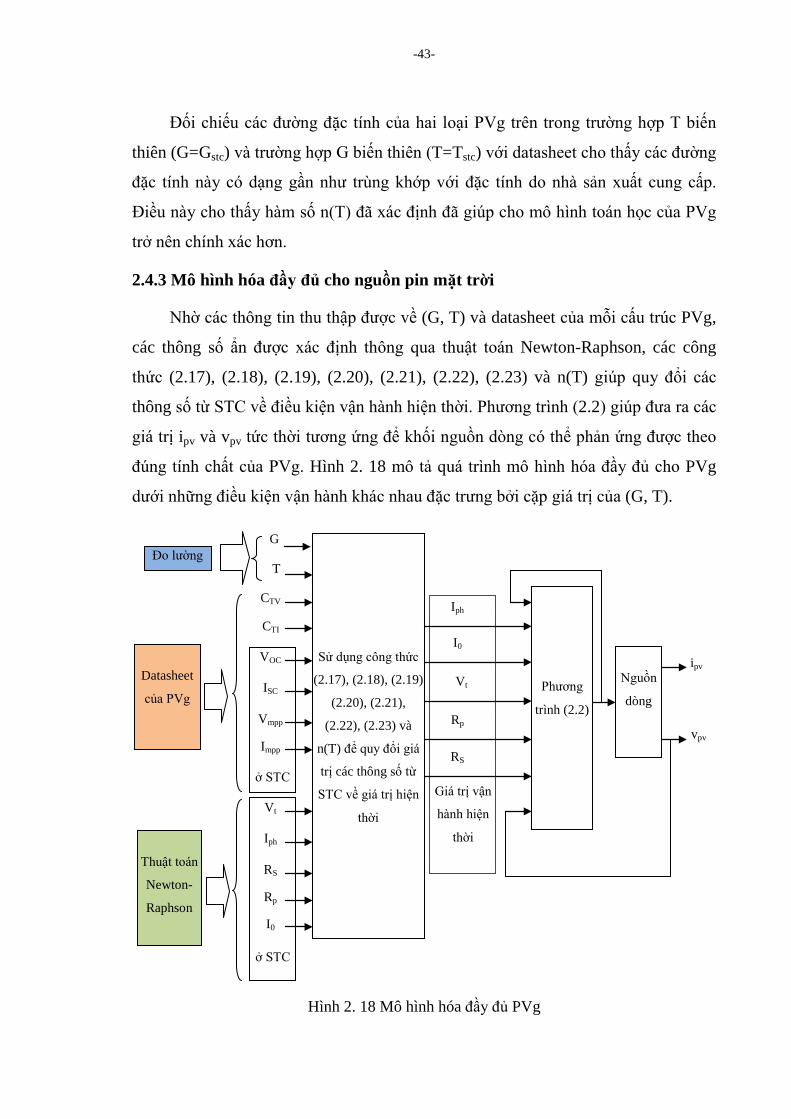
-43-
Đối chiếu các đường đặc tính của hai loại PVg trên trong trường hợp T biến
thiên (G=Gstc) và trường hợp G biến thiên (T=Tstc) với datasheet cho thấy các đường
đặc tính này có dạng gần như trùng khớp với đặc tính do nhà sản xuất cung cấp.
Điều này cho thấy hàm số n(T) đã xác định đã giúp cho mô hình toán học của PVg
trở nên chính xác hơn.
2.4.3 Mô hình hóa đầy đủ cho nguồn pin mặt trời
Nhờ các thông tin thu thập được về (G, T) và datasheet của mỗi cấu trúc PVg,
các thông số ẩn được xác định thông qua thuật toán Newton-Raphson, các công
thức (2.17), (2.18), (2.19), (2.20), (2.21), (2.22), (2.23) và n(T) giúp quy đổi các
thông số từ STC về điều kiện vận hành hiện thời. Phương trình (2.2) giúp đưa ra các
giá trị ipv và vpv tức thời tương ứng để khối nguồn dòng có thể phản ứng được theo
đúng tính chất của PVg. Hình 2. 18 mô tả quá trình mô hình hóa đầy đủ cho PVg
dưới những điều kiện vận hành khác nhau đặc trưng bởi cặp giá trị của (G, T).
Hình 2. 18 Mô hình hóa đầy đủ PVg
Phương
trình (2.2)
G
T
Sử dụng công thức
(2.17), (2.18), (2.19)
(2.20), (2.21),
(2.22), (2.23) và
n(T) để quy đổi giá
trị các thông số từ
STC về giá trị hiện
thời
VOC
ISC
Vmpp
Impp
ở STC
CTV
CTI
Vt
Iph
RS
Rp
ở STC
I0
Đo lường
Datasheet
của PVg
Thuật toán
Newton-
Raphson
Iph
I0
Vt
Rp
RS
Giá trị vận
hành hiện
thời
Nguồn
dòng
ipv
vpv
-44-
Một điều đáng lưu ý ở đây là việc mô hình hóa đầy đủ, xác định chính xác
thông số tại MPP chỉ được áp dụng trong các hệ thống có quy mô công suất lắp đặt
của PVg ở mức vừa và nhỏ. Nguyên nhân của điều này là nhằm tránh sự làm việc
không đồng đều giữa các cell của PVg trong những điều kiện vận hành thực tế.
2.5 Kết luận chương 2
PVg là một đối tượng khá phức tạp, việc mô tả toán học và thực hiện mô hình
hóa gặp nhiều khó khăn. Những khó khăn được kể đến bao gồm: có 5 thông số
không được nhà sản xuất công bố, các thông số của PVg thay đổi theo cả G và T,
quan hệ n(T) phi tuyến. Các kết quả nghiên cứu trong chương 2 đã đạt được mục
tiêu đề ra, cụ thể là:
• Xây dựng thành công bài toán xác định các thông số ẩn cho cấu trúc PVg bất
kỳ nhờ vận dụng phương pháp Newton-Raphson.
• Xây dựng mới kỹ thuật IB cho bài toán xác định chính xác thông số tại MPP:
kỹ thuật dò xác định các cặp (vpv(i), ipv
(i)) trên đường đặc tính vpv-ipv, kỹ thuật chia
đôi dựa trên quan sát trạng thái của 3 điểm kế tiếp nhau trên đường đặc tính vpv-ppv
để tìm điểm có công suất lớn nhất. Với kỹ thuật IB, nhóm các kỹ thuật offline đã
được bổ sung thêm một giải pháp tìm MPP mới với độ chính xác cao và giảm được
khối lượng tính toán.
• Xây dựng mới giải pháp xác định mối quan hệ giữa hệ số n và T: hàm số
n(T) sẽ được xác định dựa trên sự kết hợp phương pháp bình phương cực tiểu với
các công thức kinh nghiệm về sự biến thiên của các thông số theo (G, T), datasheet
của nhà sản xuất và kết quả của kỹ thuật IB. Giải pháp này giúp mô hình hóa đầy đủ
cấu trúc PVg bất kỳ trở nên rõ ràng và kết quả tìm MPP ở điều kiện vận hành bất kỳ
chính xác hơn.
Các kết quả nghiên cứu trên đây đã giúp xây dựng phương pháp luận cụ thể
cho bài toán xác định chính xác thông số tại MPP khi sử dụng thông tin thu được từ
PYR và TempS ở điều kiện vận hành bất kỳ. Đồng thời, các kết quả tính toán được
về MPP sẽ được sử dụng để cung cấp thông tin cho bộ điều khiển trong chương 3.
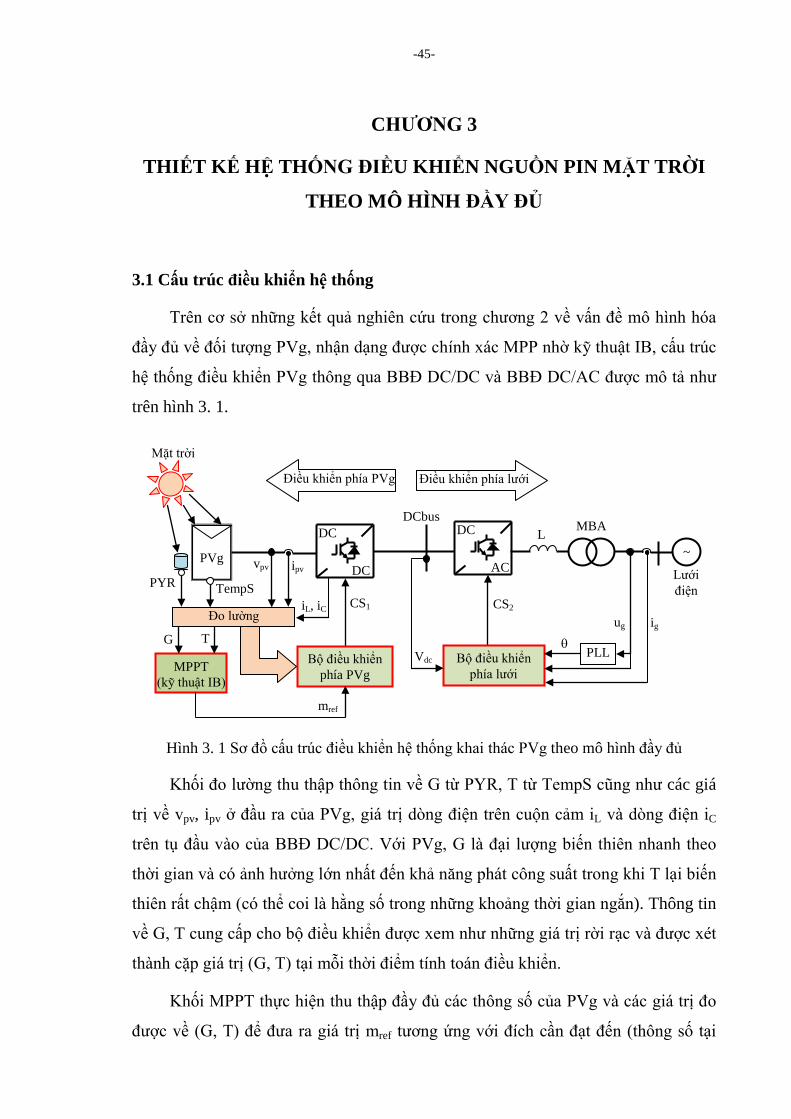
-45-
CHƯƠNG 3
THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN NGUỒN PIN MẶT TRỜI
THEO MÔ HÌNH ĐẦY ĐỦ
3.1 Cấu trúc điều khiển hệ thống
Trên cơ sở những kết quả nghiên cứu trong chương 2 về vấn đề mô hình hóa
đầy đủ về đối tượng PVg, nhận dạng được chính xác MPP nhờ kỹ thuật IB, cấu trúc
hệ thống điều khiển PVg thông qua BBĐ DC/DC và BBĐ DC/AC được mô tả như
trên hình 3. 1.
Hình 3. 1 Sơ đồ cấu trúc điều khiển hệ thống khai thác PVg theo mô hình đầy đủ
Khối đo lường thu thập thông tin về G từ PYR, T từ TempS cũng như các giá
trị về vpv, ipv ở đầu ra của PVg, giá trị dòng điện trên cuộn cảm iL và dòng điện iC
trên tụ đầu vào của BBĐ DC/DC. Với PVg, G là đại lượng biến thiên nhanh theo
thời gian và có ảnh hưởng lớn nhất đến khả năng phát công suất trong khi T lại biến
thiên rất chậm (có thể coi là hằng số trong những khoảng thời gian ngắn). Thông tin
về G, T cung cấp cho bộ điều khiển được xem như những giá trị rời rạc và được xét
thành cặp giá trị (G, T) tại mỗi thời điểm tính toán điều khiển.
Khối MPPT thực hiện thu thập đầy đủ các thông số của PVg và các giá trị đo
được về (G, T) để đưa ra giá trị mref tương ứng với đích cần đạt đến (thông số tại
DC ~
G
vpv
ug ig
Lưới điện
Vdc
DCbus MBA
MPPT (kỹ thuật IB)
Đo lường
T
Bộ điều khiển phía PVg
mref
L
Bộ điều khiển phía lưới
CS1
Điều khiển phía PVg Điều khiển phía lưới
PVg
PYR TempS CS2
Mặt trời
PLL θ
DC DC
AC ipv
iL, iC
-46-
MPP). Bộ điều khiển phía PVg sẽ thực hiện tính toán và đưa ra quyết định về độ
rộng của xung điều khiển (CS1) trước khi gửi tín hiệu điều khiển đến SW đặt trong
BBĐ DC/DC nhằm đưa được toàn bộ công suất tại MPP về phía DCbus.
Bộ điều khiển phía lưới thu thập thông tin về dòng điện, điện áp tại điểm ghép
nối với lưới điện, góc pha của điện áp lưới từ vòng lặp khóa pha (PLL) và điện áp
trên Vdc, để tính toán, đưa ra quyết định về xung điều khiển trước khi gửi đến các
SW trong BBĐ DC/AC. Nhiệm vụ của khối điều khiển phía lưới là điều khiển giữ
điện áp trên DCbus ở giá trị không đổi, hòa đồng bộ với lưới và phát được công suất
từ PVg vào lưới. Điều này cũng có nghĩa là BBĐ DC/AC có vai trò như một phần
tử trung gian liên kết DCbus với lưới và công suất từ DCbus (đã có được khi điều
khiển PVg vận hành tại MPP thông qua BBĐ DC/DC) sẽ được phát vào lưới thông
qua mạch lực của BBĐ DC/AC nhờ quá trình đồng bộ với lưới.
BBĐ DC/DC buck (giảm áp) và BBĐ DC/DC boost (tăng áp) đều có những
ứng dụng riêng trong hệ thống khai thác PVg tùy theo mục đích điện áp ở đầu ra
BBĐ DC/DC nhỏ hơn hay lớn hơn điện áp đầu vào. Vì vậy, cả hai loại BBĐ này
đều được nghiên cứu trong bài toán điều khiển khi kết hợp kỹ thuật IB trong MPPT
đã xây dựng ở chương 2 với kỹ thuật SMC hoặc AVC để khảo sát, đánh giá khả
năng khai thác năng lượng cho đối tượng là một panel của PVg với giả thiết điện áp
trên DCbus không thay đổi (DCbus đã được kết nối đến những phần tử có khả năng
hấp thụ công suất vô hạn như kho điện hoặc lưới điện).
Trong bài toán ứng dụng kết nối lưới, PVg được sử dụng với các cấu trúc ghép
để đạt công suất và điện áp theo yêu cầu. Đồng thời, BBĐ DC/DC boost được sử
dụng để điều khiển vận hành tại MPP cho PVg cấu trúc ghép có sử dụng mô hình
toán học đầy đủ.
Một đặc điểm quan trọng của PVg đã phân tích trong chương 2 cần phải lưu ý
khi thiết kế điều khiển được nhắc lại ở đây là tại mỗi thời điểm xét tương ứng với
mỗi cặp giá trị (G, T) sẽ luôn tồn tại duy nhất một đường đặc tính vpv-ipv (tương ứng
có một đường đặc tính vpv-ppv). BBĐ DC/DC được điều khiển nhằm mục tiêu khai
thác được MPP sẽ di chuyển điểm L (do sự thay đổi về (G, T) làm cho điểm vận
hành thay đổi từ điểm K trên đường đặc tính vpv1-ipv1 về điểm L trên đường đặc tính
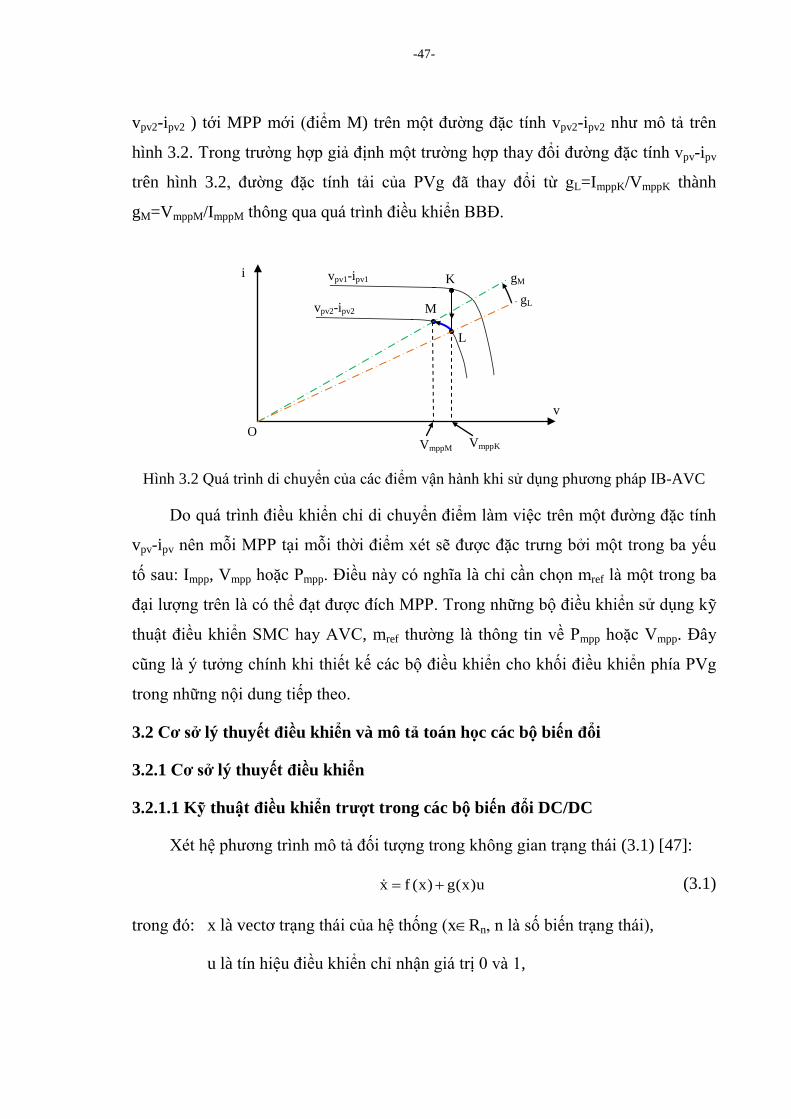
-47-
vpv2-ipv2 ) tới MPP mới (điểm M) trên một đường đặc tính vpv2-ipv2 như mô tả trên
hình 3.2. Trong trường hợp giả định một trường hợp thay đổi đường đặc tính vpv-ipv
trên hình 3.2, đường đặc tính tải của PVg đã thay đổi từ gL=ImppK/VmppK thành
gM=VmppM/ImppM thông qua quá trình điều khiển BBĐ.
Hình 3.2 Quá trình di chuyển của các điểm vận hành khi sử dụng phương pháp IB-AVC
Do quá trình điều khiển chỉ di chuyển điểm làm việc trên một đường đặc tính
vpv-ipv nên mỗi MPP tại mỗi thời điểm xét sẽ được đặc trưng bởi một trong ba yếu
tố sau: Impp, Vmpp hoặc Pmpp. Điều này có nghĩa là chỉ cần chọn mref là một trong ba
đại lượng trên là có thể đạt được đích MPP. Trong những bộ điều khiển sử dụng kỹ
thuật điều khiển SMC hay AVC, mref thường là thông tin về Pmpp hoặc Vmpp. Đây
cũng là ý tưởng chính khi thiết kế các bộ điều khiển cho khối điều khiển phía PVg
trong những nội dung tiếp theo.
3.2 Cơ sở lý thuyết điều khiển và mô tả toán học các bộ biến đổi
3.2.1 Cơ sở lý thuyết điều khiển
3.2.1.1 Kỹ thuật điều khiển trượt trong các bộ biến đổi DC/DC
Xét hệ phương trình mô tả đối tượng trong không gian trạng thái (3.1) [47]:
x f (x) g(x)u= + (3.1)
trong đó: x là vectơ trạng thái của hệ thống (x∈Rn, n là số biến trạng thái),
u là tín hiệu điều khiển chỉ nhận giá trị 0 và 1,
i
v
gM vpv1-ipv1
vpv2-ipv2 M
VmppM VmppK
K
L
gL
O

-48-
=
)x(f
)x(f)x(f
)x(f
n
2
1
được gọi là trường vectơ trôi (drift vector field),
=
)x(g
)x(g)x(g
)x(g
n
2
1
được gọi là trường vectơ điều khiển (control input field),
f(x) và g(x) là các vectơ trơn (có thể đạo hàm vô tận lần).
Mặt trượt
Trong hệ thống n chiều (n biến trạng thái) mà chỉ có duy nhất 1 biến điều
khiển u thì mặt trượt S là tập hợp các vectơ trạng thái trong không gian Rn thỏa mãn
h=0. Mặt trượt S là một đa diện trơn (n - 1) chiều trong không gian Rn (mất 1 chiều
thỏa mãn h(x) = 0).
S = x ∈ Rnh = 0
Giả thiết tồn tại một tín hiệu điều khiển phản hồi rời rạc u phù hợp thỏa mãn
u∈0, 1 làm cho quỹ đạo trạng thái x(t) thỏa mãn h trong lân cận điểm 0 hay h ≈ 0.
Sự di chuyển của trạng thái hệ thống x(t) trên mặt trượt S sẽ thỏa mãn các yêu cầu
của điều khiển hệ thống khi xem xét sự ổn định của các trạng thái hệ thống [47].
Gọi đạo hàm của h theo hướng f(x) là f ThL h f (x)
x∂
=∂
, đạo hàm của h theo
hướng g(x) là g ThL h g(x)
x∂
=∂
.
Tín hiệu điều khiển tương đương ueq
Tín hiệu điều khiển tương đương ueq (equivalent control) là sự tương đương
giữa tín hiệu điều khiển (tín hiệu 0, 1) có tần số đóng cắt vô cùng lớn và tín hiệu
điều khiển trơn. Có thể hiểu ueq là luật điều khiển phản hồi trơn có thể duy trì quỹ
đạo trạng thái lý tưởng luôn nằm trên mặt S khi trạng thái đầu tiên của hệ thống
-49-
x(t0)=x0 cũng nằm trên mặt S hay h(x0)=0. Khi đó h phải thỏa mãn điều kiện (3.2)
[12], [47]:
h xh 0 0x t∂ ∂
= ⇔ =∂ ∂
( )h f (x) g(x) u 0
x∂
⇔ + =∂
f g eqL h (L h)u 0⇔ + = (3.2)
Tín hiệu điều khiển tương đương sẽ được xác định bởi (3.3) [12], [47]:
feq
g
L huL h
= − (3.3)
trong đó: 0 < ueq < 1.
Luật điều khiển được xác định theo (3.4):
[ ]1 khi h 0 1u hay u 1 sign(h)0 khi h 0 2
<= = − >
(3.4)
Quá trình thâm nhập vào bề mặt S
Xét đạo hàm theo thời gian của h(x) tại vị trí x [47]:
[ ]d h x hh f (x) g(x)udt x t x
∂ ∂ ∂= = +∂ ∂ ∂ f gL h(x) (L h)u= +
Tại những điểm ở phía trên mặt S, tương đương h>0, tín hiệu điều khiển được
đưa ra để đưa quỹ đạo trạng thái đạt tới mặt S và nằm trên đó khi h 0< [47]. Nếu
Lgh> 0 ở lân cận S, ta phải điều khiển sao cho triệt tiêu ảnh hưởng dương của Lgh
đến h . Trường hợp này chọn tín hiệu điều khiển u=0. Nếu Lgh < 0 ở lân cận S, để
tăng cường ảnh hưởng âm của Lgh thì phải chọn tín hiệu điều khiển u=1.
Tại những điểm ở phía dưới mặt S, tương đương h< 0, tín hiệu điều khiển
được đưa ra để đưa quỹ đạo trạng thái đạt tới mặt S và nằm trên đó khi h 0> [47],
[104]. Nếu Lgh> 0 ở lân cận S, để tính đến ảnh hưởng dương của Lgh thì phải chọn
tín hiệu điều khiển u=1. Nếu Lgh < 0 ở lân cận S, để loại bỏ đến ảnh hưởng âm của
-50-
Lgh thì phải chọn tín hiệu điều khiển u=0. Nếu Lgh=0 trong một lân cận nào đó
quanh mặt trượt S thì hệ thống sẽ không điều khiển được vì h không thể đổi dấu
trong một vùng của S. Vì vậy, để tồn tại sự ổn định quanh mặt trượt, lý thuyết
Lyapunov đã chứng minh điều kiện (3.5) [90]:
h 0 u 1 u 1,h 0
h 0 u 0 u 0,h 0
dh dhlim 0dt dt
dh dhlim 0dt dt
−
+
→ = = =
→ = = =
= >
= <
(3.5)
3.2.1.2 Kỹ thuật điều khiển điện áp trung bình
Với hệ phương trình (3.1), điểm cân bằng của hệ thống có chứa các biến và
tham số (x, u) luôn thỏa mãn điều kiện (3.6):
f (x) g(x)u 0+ = (3.6)
Cũng theo lý thuyết của Lyapunov, nếu một hệ thống phi tuyến ở gần trạng
thái cân bằng và nó ổn định thì sẽ có một vùng chứa trạng thái cân bằng, nơi mà hệ
thống phi tuyến đó là ổn định. Điều này có nghĩa là hệ thống có thể được tuyến tính
hóa ở lân cận điểm cân bằng và các biến trạng thái sẽ dao động với tín hiệu nhỏ.
Bản chất của quá trình điều khiển này là tạo ra sự tương thích các biến hệ thống để
đạt được giá trị mong muốn. Nghiệm của hệ phương trình (3.1) sẽ dao động xung
quanh giá trị cân bằng theo quy tắc (3.7):
0
0
x X xu U u= +
= +
(3.7)
trong đó: các đại lượng có ký hiệu in hoa (X0, U0) xác định ở trạng thái ổn định, các
đại lượng có dấu “~” dao động với giá trị rất nhỏ nên được coi là các giá trị xác
định ở trạng thái tín hiệu nhỏ.
Với các BBĐ, bản chất của quá trình điều khiển là sử dụng phương pháp trung
bình hóa mạch đóng cắt, thay thế mạch điện bằng một mạng hai cửa với các biến là
điện áp, dòng điện ở cửa vào và cửa ra. Phương pháp trung bình hóa dựa trên cơ sở
các đại lượng cần điều khiển như điện áp, dòng điện ở đầu vào hay đầu ra BBĐ thay
đổi với tần số thấp hơn nhiều so với tần số đóng cắt của mạch điều khiển. Khi đó có

-51-
thể bỏ qua độ đập mạch của điện áp hay dòng điện và chỉ cần quan tâm đến giá trị
trung bình của chúng trong một chu kỳ đóng cắt TS. Sau khi trung bình hóa ta sẽ
loại bỏ được phần tử đóng cắt và thu được mô hình tín hiệu lớn DC và tín hiệu nhỏ
AC. Vì vậy, kỹ thuật điều khiển điện áp trung bình được áp dụng để điều khiển các
BBĐ nhằm mục đích đưa điện áp ở đầu vào về giá trị mong muốn, trong đó có kết
hợp với mô hình tín hiệu nhỏ để xác định các thông số cho bộ điều khiển.
3.2.2 Mô tả toán học bộ biến đổi DC/DC buck
3.2.2.1 Bộ biến đổi DC/DC buck
BBĐ DC/DC buck được mô tả như trên hình 3. 3 gồm có một SW và các phần
tử có khả năng tích phóng năng lượng (L, C) [41], [43], [69], [75].
Hình 3. 3 Sơ đồ cấu tạo mạch lực BBĐ DC/DC buck
Trong đó: Rdc, Ldc là điện trở và điện cảm của cuộn cảm trong BBĐ DC/DC.
Cpv là tụ điện phía PVg, Cdc là tụ điện phía DCbus.
SW có hai trạng thái vận hành trong mỗi chu kỳ xung: đóng (on) và cắt (off).
Sơ đồ mạch tương đương BBĐ DC/DC buck tương ứng với trạng thái đóng cắt
được mô tả trên hình 3.4.
Hình 3.4 Sơ đồ mạch tương đương trạng thái đóng cắt BBĐ DC/DC buck
Viết phương trình Kirchhoff 1 và 2 cho mạch trong trường hợp SW on (u=1)
và SW off (u=0) thu được (3.8):
Cpv Diode
Rdc, Ldc SW
+ +
-
DCbus
Cdc Vdc
B
-
PVg
Cpv
Rdc, Ldc iL
a. SW on
ipv
Vdc
iC
vpv
PVg
iC
Cpv
Rdc, Ldc iL ipv
b. SW off
Vdc vpv
PVg
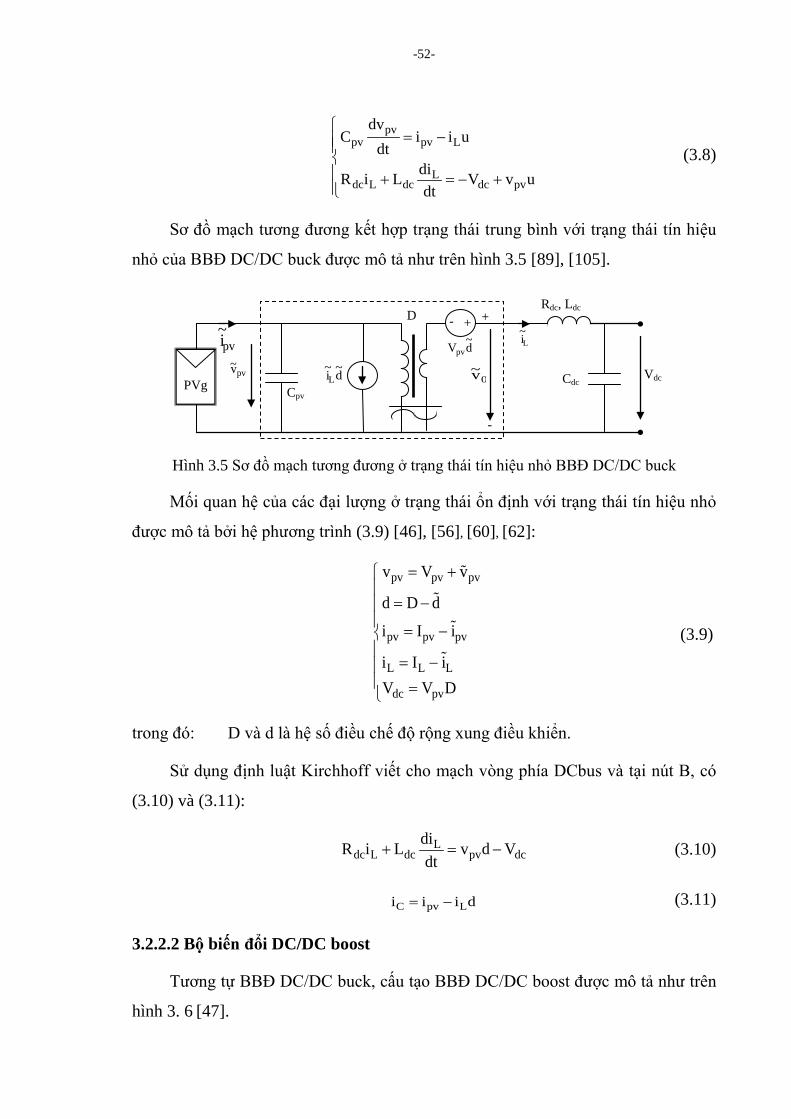
-52-
pv
pv pv L
Ldc L dc dc pv
dvC i i u
dtdiR i L V v udt
= −
+ = − +
(3.8)
Sơ đồ mạch tương đương kết hợp trạng thái trung bình với trạng thái tín hiệu
nhỏ của BBĐ DC/DC buck được mô tả như trên hình 3.5 [89], [105].
Hình 3.5 Sơ đồ mạch tương đương ở trạng thái tín hiệu nhỏ BBĐ DC/DC buck
Mối quan hệ của các đại lượng ở trạng thái ổn định với trạng thái tín hiệu nhỏ
được mô tả bởi hệ phương trình (3.9) [46], [56], [60], [62]:
pv pv pv
pv pv pv
L L L
dc pv
v V v
d D d
i I i
i I iV V D
= +
= − = −
= − =
(3.9)
trong đó: D và d là hệ số điều chế độ rộng xung điều khiển.
Sử dụng định luật Kirchhoff viết cho mạch vòng phía DCbus và tại nút B, có
(3.10) và (3.11):
Ldc L dc pv dc
diR i L v d Vdt
+ = − (3.10)
C pv Li i i d= − (3.11)
3.2.2.2 Bộ biến đổi DC/DC boost
Tương tự BBĐ DC/DC buck, cấu tạo BBĐ DC/DC boost được mô tả như trên
hình 3. 6 [47].
- +
Vdc d~i~L
pvi~
Li~
Rdc, Ldc +
-
Cdc
D
0v~
d~
Vpv
Cpv
pvv~
PVg

-53-
Hình 3. 6 Sơ đồ cấu tạo mạch lực BBĐ DC/DC boost
Sơ đồ mạch tương đương BBĐ DC/DC boost tương ứng với trạng thái đóng
cắt được mô tả như trên hình 3.7.
Hình 3.7 Sơ đồ mạch tương đương trạng thái đóng cắt BBĐ DC/DC boost
Trong đó: iC là dòng điện qua tụ Cpv đặt ở đầu vào BBĐ DC/DC.
Viết phương trình Kirchhoff 1 và 2 cho mạch trong trường hợp SW on và SW
off thu được phương trình (3.12) và (3.13):
Lpv dc dc
div L (1 u)Vdt
= + − (3.12)
pvpv pv L
dvi C i
dt= + (3.13)
Sơ đồ mạch tương đương trạng thái trung bình kết hợp tín hiệu nhỏ của BBĐ
DC/DC boost được mô tả như trên hình 3.8 [89], [105].
Hình 3.8 Sơ đồ mạch tương đương ở trạng thái tín hiệu nhỏ BBĐ DC/DC boost
- +
Vdc
2i d
pvi~
2i Rdc, Ldc
Cdc
1/(1-D)
d~
Vpv
pvv~
PVg
Cpv
Li
Diode Rdc, Ldc
SW
+ +
-
DCbus
Cdc Vdc
B
-
PVg
Cpv
Rdc, Ldc
+ +
-
DCbus
Cdc Vdc
-
PVg
b. SW off
Cpv
iL iC
Rdc, Ldc
+ +
-
Cdc Vdc
-
PVg
a. SW on
Cpv
iC iL
ipv ipv
-54-
Mối quan hệ của các đại lượng ở trạng thái ổn định với trạng thái tín hiệu nhỏ
được mô tả bởi (3.14) [46], [56], [60], [62]:
pv pv pv
pv pv pv
L L L
pv dc dc L
v V v
d D d
i I i
i I iV (1 D)V R I
= +
= − = −
= − = − +
(3.14)
Sử dụng định luật Kirchhoff viết cho mạch vòng phía DCbus và tại nút B, có
phương trình (3.13) và (3.15):
Ldc L dc pv dc
diR i L v (1 d)Vdt
+ = − − (3.15)
3.3 Điều khiển khai thác điểm công suất cực đại của nguồn pin mặt trời theo
mô hình đầy đủ ở điều kiện vận hành bất kỳ
3.3.1 Phương pháp IB-SMC
3.3.1.1 Nguyên lý chung của phương pháp IB-SMC
Trong chương 2, các thông số tại MPP (Vmpp, Pmpp) ở điều kiện vận hành bất
kỳ tương ứng với cặp giá trị (G, T) đã được xác định nhờ kỹ thuật IB. Sử dụng cấu
trúc điều khiển như đã mô tả trên hình 3. 1, phương pháp IB-SMC là sự kết hợp
giữa kỹ thuật IB với kỹ thuật SMC để điều khiển BBĐ DC/DC. Thông qua việc lựa
chọn mặt trượt h=0, tín hiệu điều khiển tương đương ueq sẽ được xác định, qua đó
giúp thiết lập xung điều khiển CS1 gửi đến SW đặt trong BBĐ DC/DC nhằm di
chuyển điểm vận hành hiện thời đến đích mref mong muốn mới (MPP mới). Với
nguyên tắc trên, cấu trúc điều khiển theo PVg theo phương pháp IB-SMC được mô
tả như trên hình 3. 9.
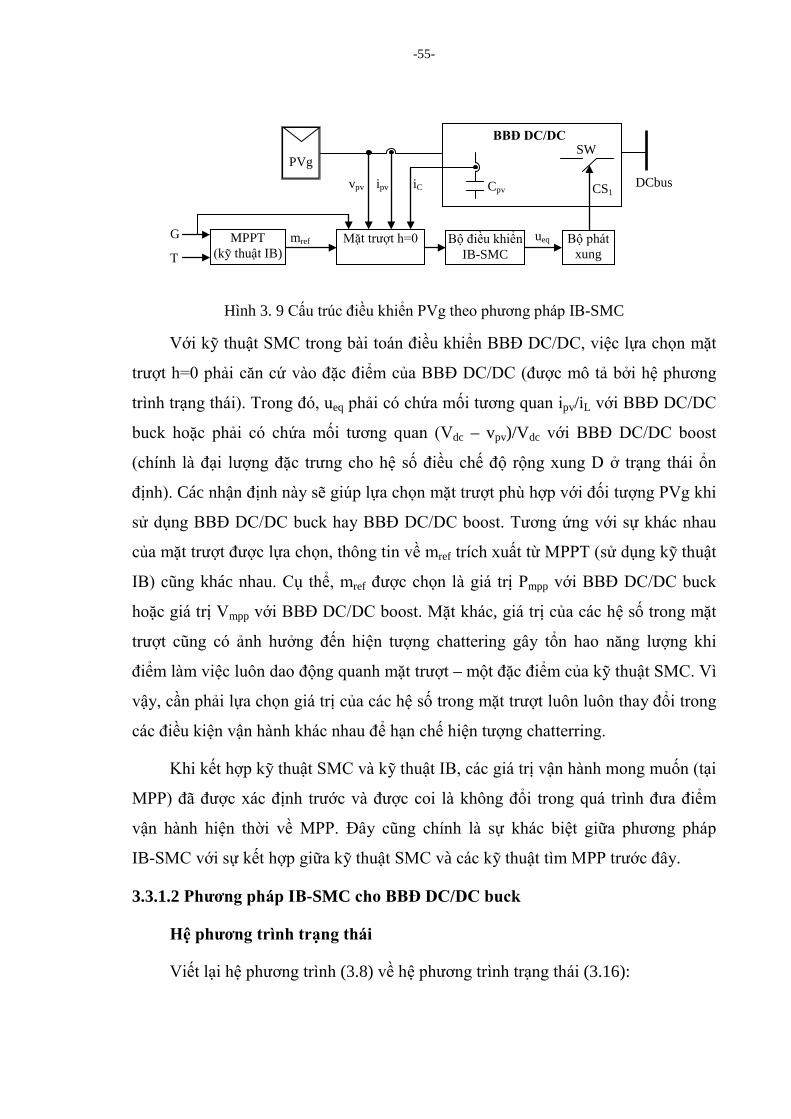
-55-
Hình 3. 9 Cấu trúc điều khiển PVg theo phương pháp IB-SMC
Với kỹ thuật SMC trong bài toán điều khiển BBĐ DC/DC, việc lựa chọn mặt
trượt h=0 phải căn cứ vào đặc điểm của BBĐ DC/DC (được mô tả bởi hệ phương
trình trạng thái). Trong đó, ueq phải có chứa mối tương quan ipv/iL với BBĐ DC/DC
buck hoặc phải có chứa mối tương quan (Vdc – vpv)/Vdc với BBĐ DC/DC boost
(chính là đại lượng đặc trưng cho hệ số điều chế độ rộng xung D ở trạng thái ổn
định). Các nhận định này sẽ giúp lựa chọn mặt trượt phù hợp với đối tượng PVg khi
sử dụng BBĐ DC/DC buck hay BBĐ DC/DC boost. Tương ứng với sự khác nhau
của mặt trượt được lựa chọn, thông tin về mref trích xuất từ MPPT (sử dụng kỹ thuật
IB) cũng khác nhau. Cụ thể, mref được chọn là giá trị Pmpp với BBĐ DC/DC buck
hoặc giá trị Vmpp với BBĐ DC/DC boost. Mặt khác, giá trị của các hệ số trong mặt
trượt cũng có ảnh hưởng đến hiện tượng chattering gây tổn hao năng lượng khi
điểm làm việc luôn dao động quanh mặt trượt – một đặc điểm của kỹ thuật SMC. Vì
vậy, cần phải lựa chọn giá trị của các hệ số trong mặt trượt luôn luôn thay đổi trong
các điều kiện vận hành khác nhau để hạn chế hiện tượng chatterring.
Khi kết hợp kỹ thuật SMC và kỹ thuật IB, các giá trị vận hành mong muốn (tại
MPP) đã được xác định trước và được coi là không đổi trong quá trình đưa điểm
vận hành hiện thời về MPP. Đây cũng chính là sự khác biệt giữa phương pháp
IB-SMC với sự kết hợp giữa kỹ thuật SMC và các kỹ thuật tìm MPP trước đây.
3.3.1.2 Phương pháp IB-SMC cho BBĐ DC/DC buck
Hệ phương trình trạng thái
Viết lại hệ phương trình (3.8) về hệ phương trình trạng thái (3.16):
PVg
BBĐ DC/DC
vpv
Bộ phát xung
ueq
CS1 DCbus
SW
Cpv
Mặt trượt h=0
ipv iC
Bộ điều khiển IB-SMC
MPPT (kỹ thuật IB)
G
T
mref

-56-
dc dc 21 1
dc dc dc
pv 12
pv pv
V R xx x uL L L
i xx uC C
= − − + = −
(3.16)
trong đó: x= [x1 x2] = [iL vpv] là vectơ trạng thái,
dc dc1
dc dc
pv
pv
V R xL L
f (x) iC
− − =
được gọi là trường vectơ trôi,
2
dc
1
pv
xL
g(x)x
C
= −
được gọi là trường vectơ điều khiển.
Mặt trượt
Với BBĐ DC/DC buck, đích cần đạt đến là giá trị công suất tại MPP nên chọn
mref = Pmpp, hàm số mô tả mặt trượt được xác định bởi (3.17):
2 pv mpp a Ch x i P K i 0= − + = (3.17)
hay 2 pv mpp a pv 1h x i P K (i x ) 0= − + − = (3.18)
trong đó:
Pmpp là công suất tại MPP cần đạt đến tại thời điểm xét (kết quả của thuật
toán IB và được coi là hằng số tại mỗi thời điểm tương ứng với cặp giá trị (G, T)),
ipv là hàm của x2 (ipv=ipv(x2)),
Ka (W/A) là đại lượng đánh giá độ trượt của công suất theo dòng điện và có
ảnh hưởng đến dải trễ của đường đặc tính công suất.
Đạo hàm của mặt trượt theo thời gian được xác định bởi (3.19):
2 pv mpp a pv 1d x i P K (i x )dhdt dt
− + − =
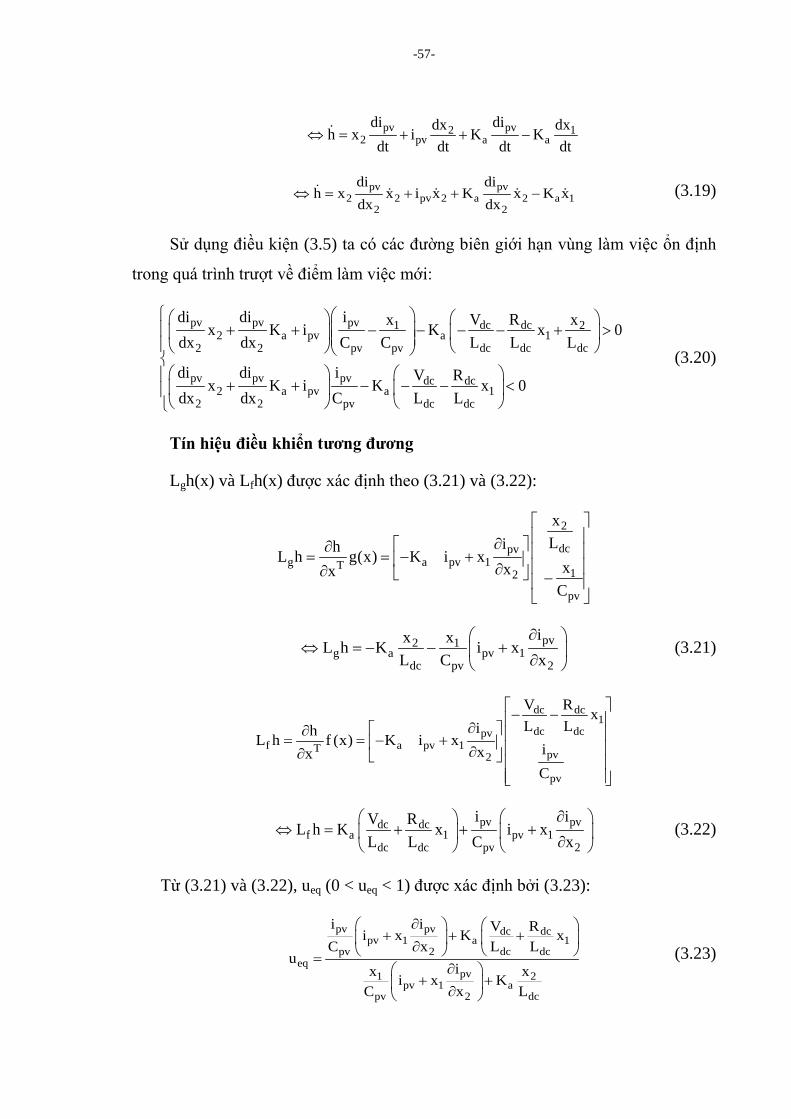
-57-
pv pv2 12 pv a a
di didx dxh x i K Kdt dt dt dt
⇔ = + + −
pv pv2 2 pv 2 a 2 a 1
2 2
di dih x x i x K x K x
dx dx⇔ = + + −
(3.19)
Sử dụng điều kiện (3.5) ta có các đường biên giới hạn vùng làm việc ổn định
trong quá trình trượt về điểm làm việc mới:
pv pv pv dc dc1 22 a pv a 1
2 2 pv pv dc dc dc
pv pv pv dc dc2 a pv a 1
2 2 pv dc dc
di di i V Rx xx K i K x 0dx dx C C L L L
di di i V Rx K i K x 0dx dx C L L
+ + − − − − + >
+ + − − − <
(3.20)
Tín hiệu điều khiển tương đương
Lgh(x) và Lfh(x) được xác định theo (3.21) và (3.22):
2
dcpvg a pv 1T
12
pv
xLihL h g(x) K i x
xxxC
∂ ∂ = = − + ∂∂ −
pv2 1g a pv 1
dc pv 2
ix xL h K i xL C x
∂ ⇔ = − − + ∂
(3.21)
dc dc1
dc dcpvf a pv 1T pv2
pv
V R xL LihL h f (x) K i x ixx
C
− − ∂ ∂ = = − + ∂∂
pv pvdc dcf a 1 pv 1
dc dc pv 2
i iV RL h K x i xL L C x
∂ ⇔ = + + + ∂
(3.22)
Từ (3.21) và (3.22), ueq (0 < ueq < 1) được xác định bởi (3.23):
pv pv dc dc
pv 1 a 1pv 2 dc dc
eqpv1 2
pv 1 apv 2 dc
i i V Ri x K xC x L L
uix xi x K
C x L
∂ + + + ∂ =
∂ + + ∂
(3.23)

-58-
Có thể thấy rằng mục tiêu xác định đúng mặt trượt để ueq có chứa mối tương
quan ipv/iL đã đạt được. Các thành phần còn lại trong biểu thức (3.23) biểu diễn ueq
có giá trị rất nhỏ nhưng đóng vai trò như thành phần dẫn trạng thái giúp biến đổi giá
trị của ueq của trạng thái hiện tại sang ueq của trạng thái mong muốn phù hợp với sự
biến đổi thông số trạng thái của BBĐ DC/DC buck cũng như của PVg.
3.3.1.3 Phương pháp IB-SMC cho BBĐ DC/DC boost
Hệ phương trình trạng thái
Viết lại hệ phương trình (3.12) về hệ phương trình trạng thái (3.24):
2 dc dc1
dc dc
pv 12
pv
x V Vx uL L
i xx
C
− = + − =
(3.24)
trong đó: x= [x1 x2] = [iL vpv] là vectơ trạng thái,
2 dc
dc
pv 1
pv
x VL
f (x) i xC
− = −
được gọi là vec tơ trôi,
dc
dc
VLg(x)0
=
là vec tơ điều khiển.
Mặt trượt
Với BBĐ DC/DC boost, chọn mref = Vmpp, hàm số mô tả mặt trượt được mô tả
bởi (3.25):
b 2 mpp c Ch K (x V ) K i 0= − + = (3.25)
hay b 2 mpp c pv 1h K (x V ) K (i x ) 0= − + − = (3.26)
trong đó:
Vmpp là công suất tại MPP cần đạt đến tại thời điểm xét (kết quả của thuật
toán IB và được coi là hằng số tại mỗi thời điểm tương ứng với cặp giá trị (G, T)),

-59-
ipv là hàm của x2 (ipv=ipv(x2)),
Kb là số thực đặc trưng cho dải trễ của mặt trượt,
Kc (V/A) là đại lượng đánh giá độ trượt của điện áp theo dòng điện [38].
Để trượt được về MPP, động học của chế độ trượt được mô tả trên miền
Laplace bởi (3.27) [38]:
2C pv
dxi Cdt
=
bpv 2 2 mpp
c
KsC x (x V )K
⇔ = − −
2
c pvmpp
b
x (s) 1K CV (s) 1 s
K
⇔ =+
(3.27)
Biểu thức (3.27) cho thấy để trượt được về MPP thì Kb và Kc phải cùng dấu.
Đạo hàm của mặt trượt theo thời gian được xác định bởi (3.28):
pv2 1b c c
didx dxdh K K Kdt dt dt dt
= + −
pv 2 dc dc2 2b c c
2 dc dc
di x V Vdx dxh K K K udt dx dt L L
−⇔ = + − +
(3.28)
Sử dụng điều kiện (3.5) ta có các đường biên giới hạn vùng làm việc ổn định
trong quá trình trượt về điểm làm việc mới:
( )
pv pv pvb c 1 b c pv c 2
2 2 dc
pv pv pvb c 1 b c pv c dc c 2
2 dc dc
di di CK K x K K i K x 0
dx dx L
di C CK K a x K K i K V K x 0
dx L L
+ − + + <
+ − + − + >
(3.29)
Tín hiệu điều khiển tương đương
Lgh và Lfh được xác định theo (3.30) và (3.31):
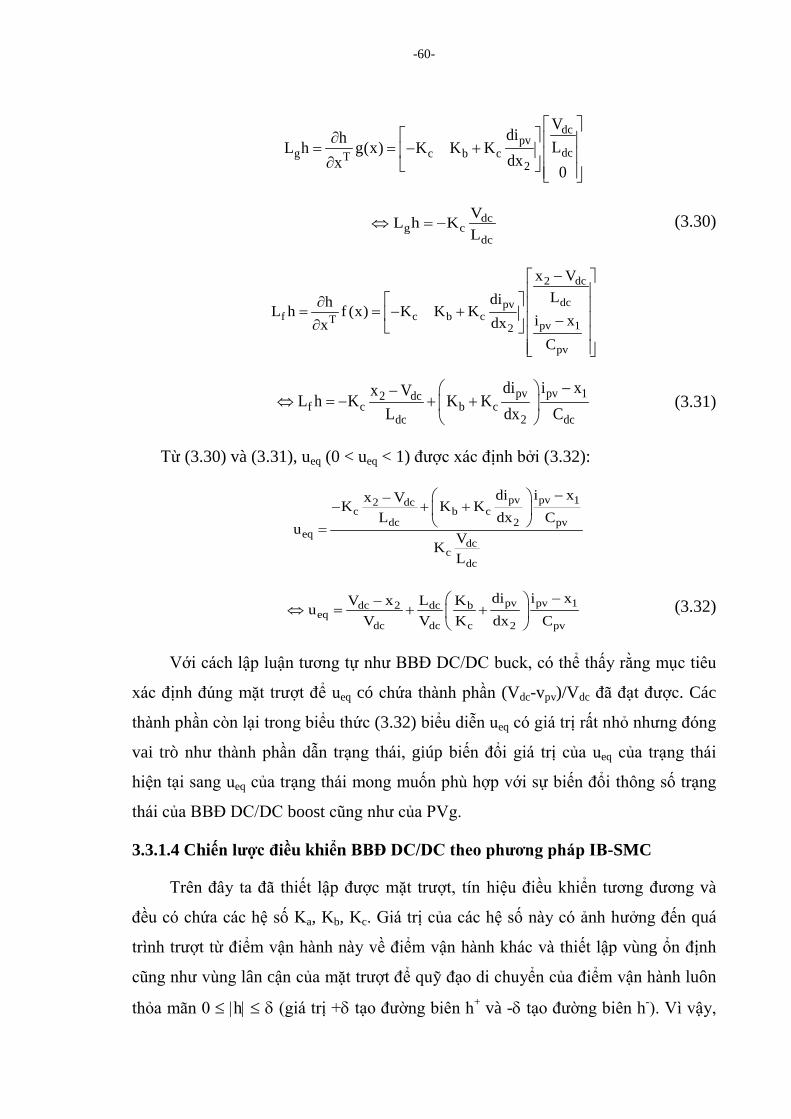
-60-
dcpv
dcg c b cT2
Vdih LL h g(x) K K Kdxx 0
∂ = = − + ∂
dcg c
dc
VL h KL
⇔ = − (3.30)
2 dc
dcpvf c b cT pv 12
pv
x VLdihL h f (x) K K K i xdxx
C
− ∂ = = − + −∂
pv pv 12 dcf c b c
dc 2 dc
di i xx VL h K K KL dx C
− −⇔ = − + +
(3.31)
Từ (3.30) và (3.31), ueq (0 < ueq < 1) được xác định bởi (3.32):
pv pv 12 dcc b c
dc 2 pveq
dcc
dc
di i xx VK K KL dx C
u VKL
− −− + +
=
pv pv 1dc 2 dc beq
dc dc c 2 pv
di i xV x L KuV V K dx C
− −⇔ = + +
(3.32)
Với cách lập luận tương tự như BBĐ DC/DC buck, có thể thấy rằng mục tiêu
xác định đúng mặt trượt để ueq có chứa thành phần (Vdc-vpv)/Vdc đã đạt được. Các
thành phần còn lại trong biểu thức (3.32) biểu diễn ueq có giá trị rất nhỏ nhưng đóng
vai trò như thành phần dẫn trạng thái, giúp biến đổi giá trị của ueq của trạng thái
hiện tại sang ueq của trạng thái mong muốn phù hợp với sự biến đổi thông số trạng
thái của BBĐ DC/DC boost cũng như của PVg.
3.3.1.4 Chiến lược điều khiển BBĐ DC/DC theo phương pháp IB-SMC
Trên đây ta đã thiết lập được mặt trượt, tín hiệu điều khiển tương đương và
đều có chứa các hệ số Ka, Kb, Kc. Giá trị của các hệ số này có ảnh hưởng đến quá
trình trượt từ điểm vận hành này về điểm vận hành khác và thiết lập vùng ổn định
cũng như vùng lân cận của mặt trượt để quỹ đạo di chuyển của điểm vận hành luôn
thỏa mãn 0 ≤ |h| ≤ δ (giá trị +δ tạo đường biên h+ và -δ tạo đường biên h-). Vì vậy,
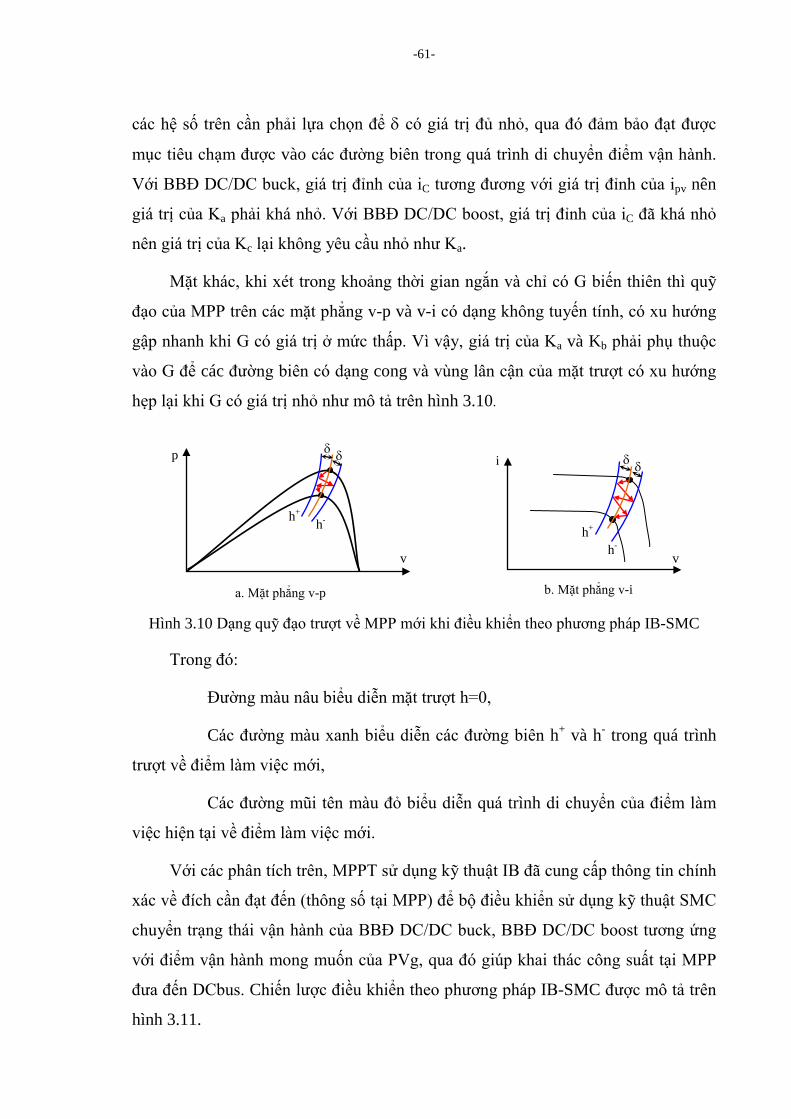
-61-
các hệ số trên cần phải lựa chọn để δ có giá trị đủ nhỏ, qua đó đảm bảo đạt được
mục tiêu chạm được vào các đường biên trong quá trình di chuyển điểm vận hành.
Với BBĐ DC/DC buck, giá trị đỉnh của iC tương đương với giá trị đỉnh của ipv nên
giá trị của Ka phải khá nhỏ. Với BBĐ DC/DC boost, giá trị đỉnh của iC đã khá nhỏ
nên giá trị của Kc lại không yêu cầu nhỏ như Ka.
Mặt khác, khi xét trong khoảng thời gian ngắn và chỉ có G biến thiên thì quỹ
đạo của MPP trên các mặt phẳng v-p và v-i có dạng không tuyến tính, có xu hướng
gập nhanh khi G có giá trị ở mức thấp. Vì vậy, giá trị của Ka và Kb phải phụ thuộc
vào G để các đường biên có dạng cong và vùng lân cận của mặt trượt có xu hướng
hẹp lại khi G có giá trị nhỏ như mô tả trên hình 3.10.
Hình 3.10 Dạng quỹ đạo trượt về MPP mới khi điều khiển theo phương pháp IB-SMC
Trong đó:
Đường màu nâu biểu diễn mặt trượt h=0,
Các đường màu xanh biểu diễn các đường biên h+ và h- trong quá trình
trượt về điểm làm việc mới,
Các đường mũi tên màu đỏ biểu diễn quá trình di chuyển của điểm làm
việc hiện tại về điểm làm việc mới.
Với các phân tích trên, MPPT sử dụng kỹ thuật IB đã cung cấp thông tin chính
xác về đích cần đạt đến (thông số tại MPP) để bộ điều khiển sử dụng kỹ thuật SMC
chuyển trạng thái vận hành của BBĐ DC/DC buck, BBĐ DC/DC boost tương ứng
với điểm vận hành mong muốn của PVg, qua đó giúp khai thác công suất tại MPP
đưa đến DCbus. Chiến lược điều khiển theo phương pháp IB-SMC được mô tả trên
hình 3.11.
p
v
a. Mặt phẳng v-p b. Mặt phẳng v-i
i
v
h+
h- h+
h-
δ δ δ δ

-62-
Hình 3.11 Chiến lược điều khiển theo phương pháp IB-SMC cho BBĐ DC/DC
3.3.1.5 Mô phỏng đánh giá phương pháp IB-SMC
Để đánh giá được khả năng bám MPP, mô phỏng được thực hiện trên
Matlab/Simulink với T=40 0C và sự biến thiên của G như mô tả trên hình 3. 12.
Kịch bản trên hình 3. 12 đều đã xét đến sự tăng giảm của G, trong đó thời gian thay
đổi từ giá trị 850 W/m2 đến 1000 W/m2 và từ 1000 W/m2 đến 800 W/m2 đều được
xét trong khoảng thời gian 0.1s.
Start
Đo G, T
MPPT (Kỹ thuật IB)
Thông số tại MPP (Vmpp, Pmpp)
Xác định ueq(t) (Kỹ thuật SMC)
h=0
Tiếp tục thực hiện (cài đặt thời gian) Stop
Đ
Duy trì ueq(t)=ueqref tại h=0
Đ
Có sự thay đổi G, T Đ
Gửi xung điều khiển đến SW
Đo vpv, ipv
Tính ppv=vpvipv
S
S
S
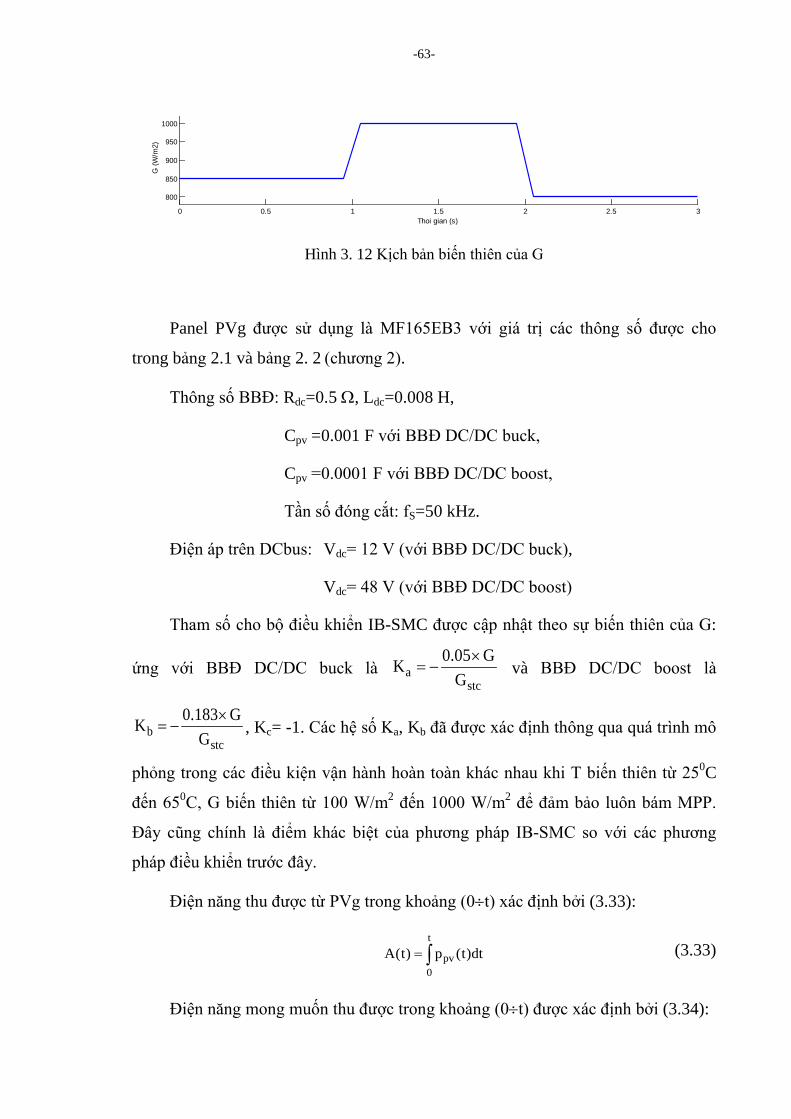
-63-
Hình 3. 12 Kịch bản biến thiên của G
Panel PVg được sử dụng là MF165EB3 với giá trị các thông số được cho
trong bảng 2.1 và bảng 2. 2 (chương 2).
Thông số BBĐ: Rdc=0.5 Ω, Ldc=0.008 H,
Cpv =0.001 F với BBĐ DC/DC buck,
Cpv =0.0001 F với BBĐ DC/DC boost,
Tần số đóng cắt: fS=50 kHz.
Điện áp trên DCbus: Vdc= 12 V (với BBĐ DC/DC buck),
Vdc= 48 V (với BBĐ DC/DC boost)
Tham số cho bộ điều khiển IB-SMC được cập nhật theo sự biến thiên của G:
ứng với BBĐ DC/DC buck là astc
0.05 GKG×
= − và BBĐ DC/DC boost là
bstc
0.183 GKG
×= − , Kc= -1. Các hệ số Ka, Kb đã được xác định thông qua quá trình mô
phỏng trong các điều kiện vận hành hoàn toàn khác nhau khi T biến thiên từ 250C
đến 650C, G biến thiên từ 100 W/m2 đến 1000 W/m2 để đảm bảo luôn bám MPP.
Đây cũng chính là điểm khác biệt của phương pháp IB-SMC so với các phương
pháp điều khiển trước đây.
Điện năng thu được từ PVg trong khoảng (0÷t) xác định bởi (3.33):
∫=t
0pv dt)t(p)t(A (3.33)
Điện năng mong muốn thu được trong khoảng (0÷t) được xác định bởi (3.34):
0 0.5 1 1.5 2 2.5 3
800
850
900
950
1000
Thoi gian (s)
G (W
/m2)

-64-
t
mpp mpp0
A (t) P (t)dt= ∫ (3.34)
Tiêu chí đánh giá hiệu quả năng lượng là so sánh mức điện năng thu được với
mức điện năng mong muốn thu được. Hiệu quả năng lượng trong khoảng thời gian
(0÷t) được xác định bởi (3.35):
mpp
A(t)H% 100%A (t)
= (3.35)
Sơ đồ mô phỏng trên Matlab/Simulink BBĐ DC/DC buck và BBĐ DC/DC
boost theo phương pháp IB-SMC được mô tả trên hình 3. 13 và hình 3. 14.
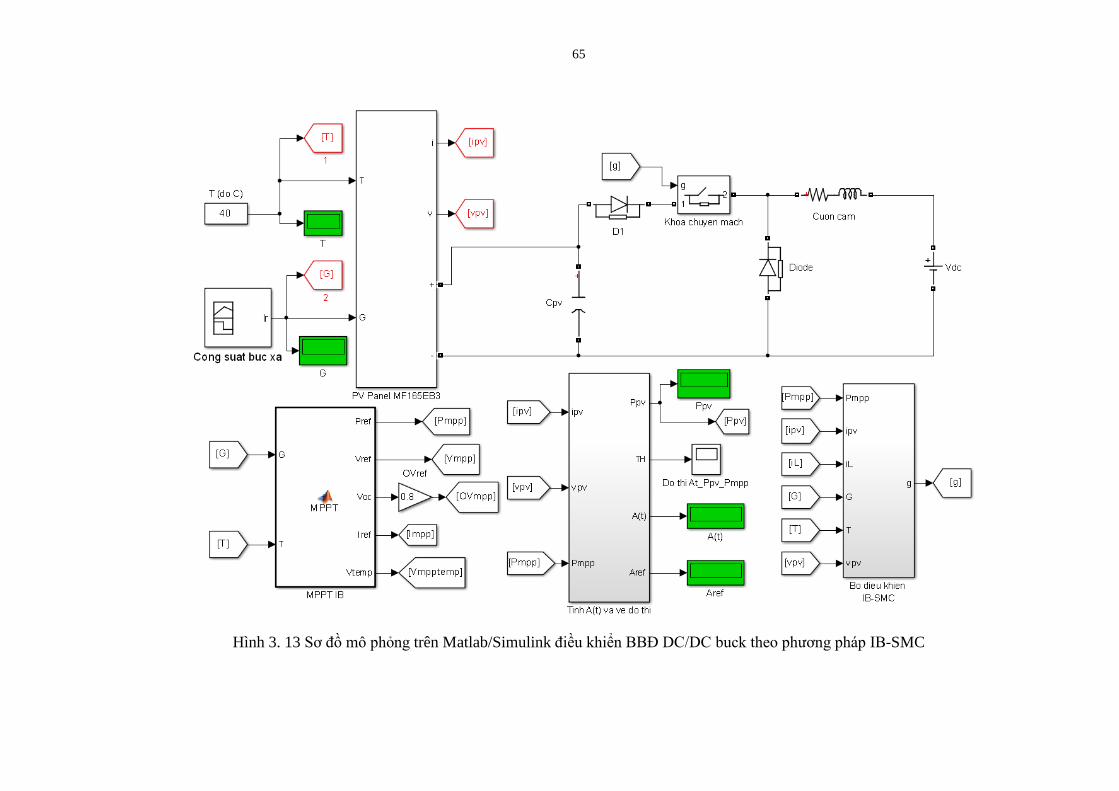
65
Hình 3. 13 Sơ đồ mô phỏng trên Matlab/Simulink điều khiển BBĐ DC/DC buck theo phương pháp IB-SMC
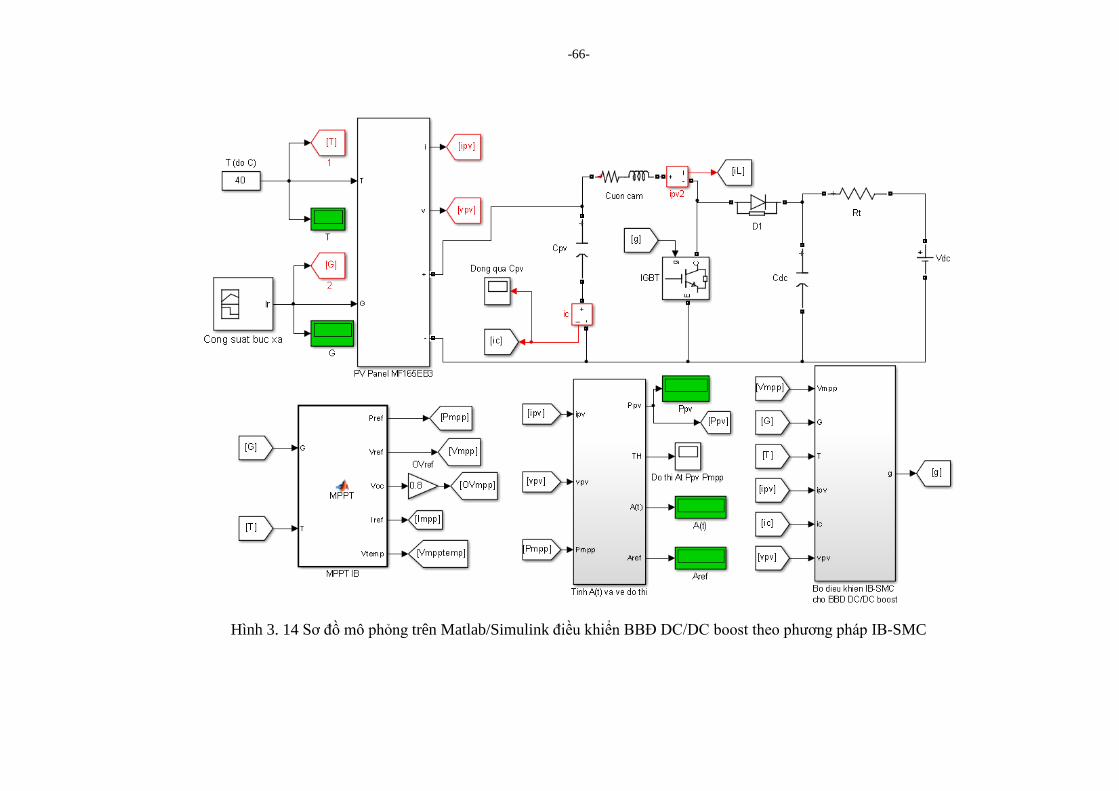
-66-
Hình 3. 14 Sơ đồ mô phỏng trên Matlab/Simulink điều khiển BBĐ DC/DC boost theo phương pháp IB-SMC
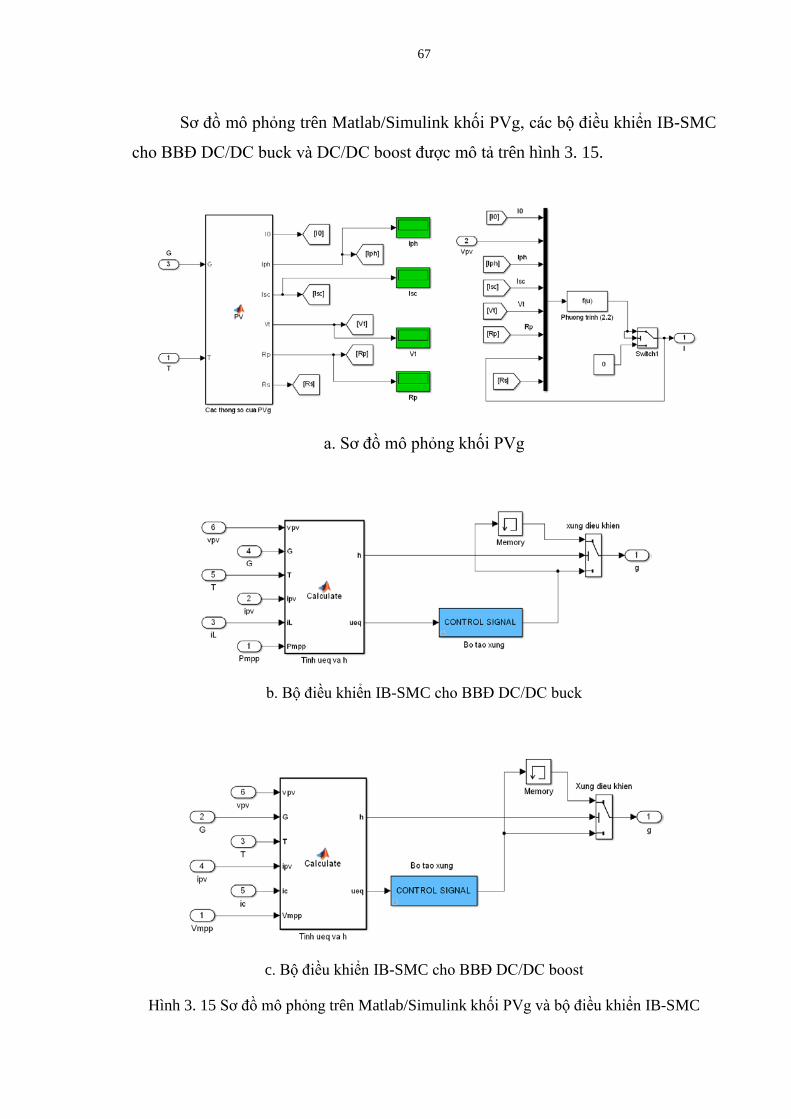
67
Sơ đồ mô phỏng trên Matlab/Simulink khối PVg, các bộ điều khiển IB-SMC
cho BBĐ DC/DC buck và DC/DC boost được mô tả trên hình 3. 15.
a. Sơ đồ mô phỏng khối PVg
b. Bộ điều khiển IB-SMC cho BBĐ DC/DC buck
c. Bộ điều khiển IB-SMC cho BBĐ DC/DC boost
Hình 3. 15 Sơ đồ mô phỏng trên Matlab/Simulink khối PVg và bộ điều khiển IB-SMC
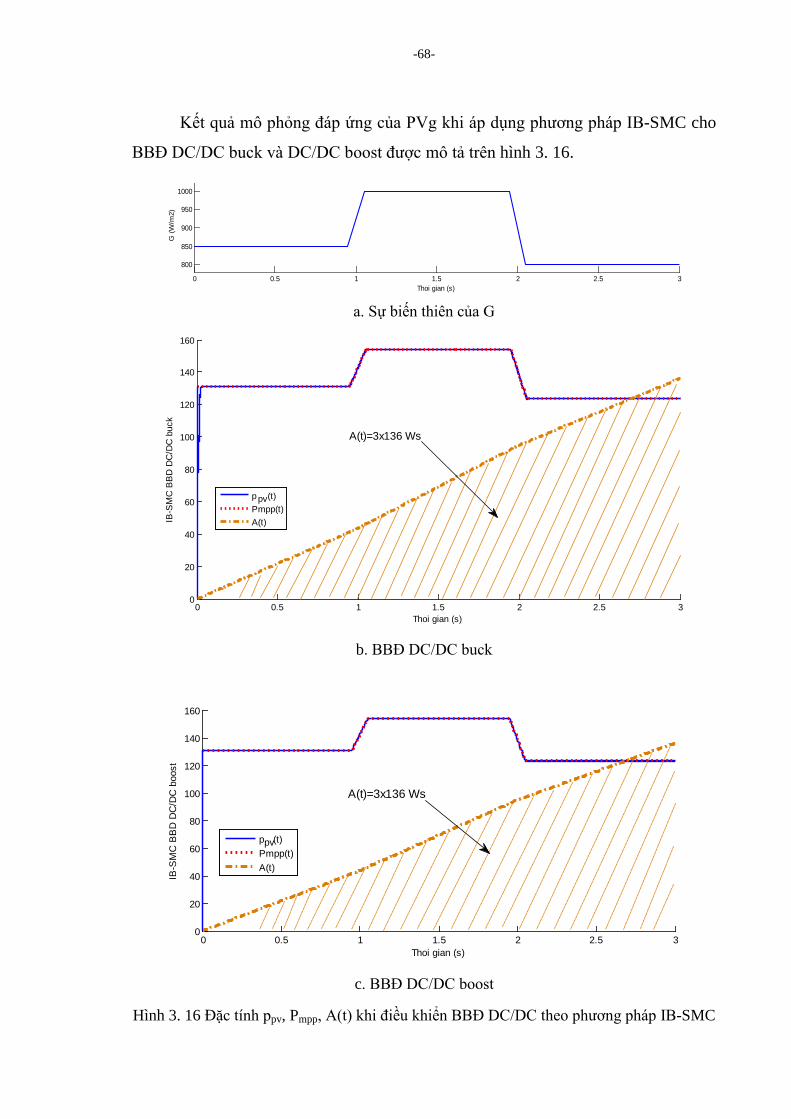
-68-
Kết quả mô phỏng đáp ứng của PVg khi áp dụng phương pháp IB-SMC cho
BBĐ DC/DC buck và DC/DC boost được mô tả trên hình 3. 16.
a. Sự biến thiên của G
b. BBĐ DC/DC buck
c. BBĐ DC/DC boost
Hình 3. 16 Đặc tính ppv, Pmpp, A(t) khi điều khiển BBĐ DC/DC theo phương pháp IB-SMC
0 0.5 1 1.5 2 2.5 3
800
850
900
950
1000
Thoi gian (s)
G (W
/m2)
0 0.5 1 1.5 2 2.5 30
20
40
60
80
100
120
140
160
Thoi gian (s)
IB-S
MC
BB
D D
C/D
C b
uck
p (t)Pmpp(t)A(t)
pv
A(t)=3x136 Ws
0 0.5 1 1.5 2 2.5 30
20
40
60
80
100
120
140
160
Thoi gian (s)
IB-S
MC
BB
D D
C/D
C b
oost
p (t)Pmpp(t)A(t)
A(t)=3x136 Ws
pv
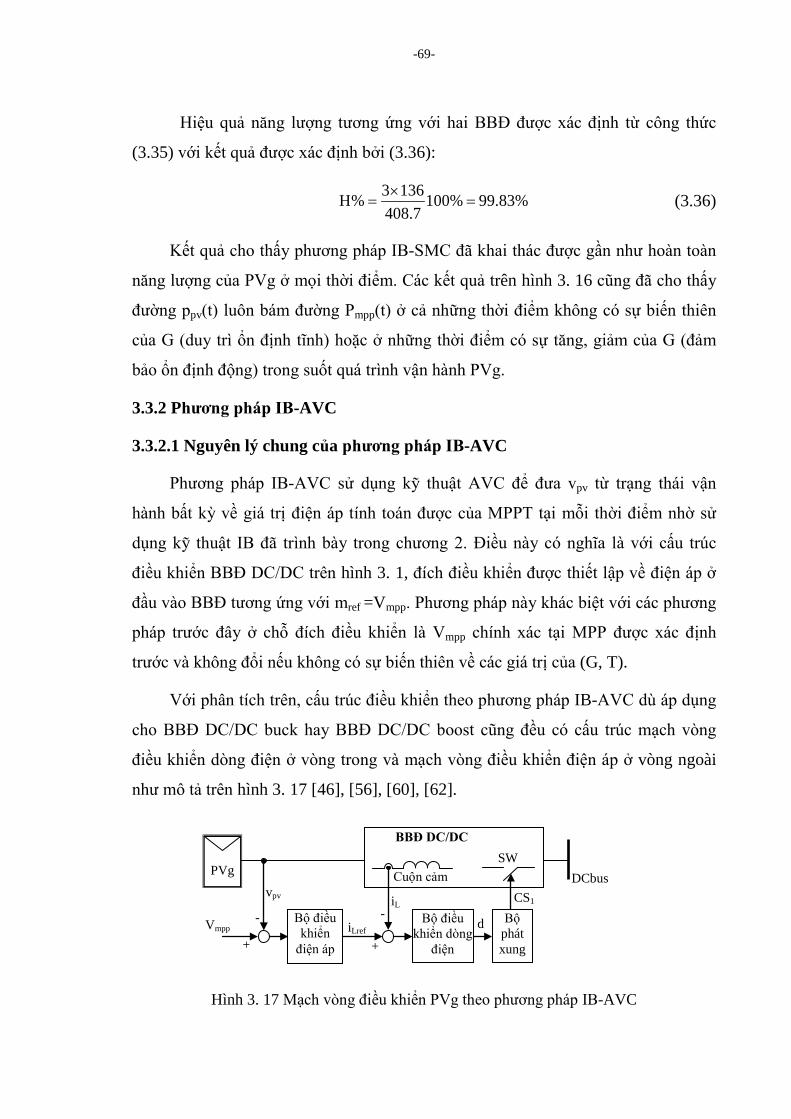
-69-
Hiệu quả năng lượng tương ứng với hai BBĐ được xác định từ công thức
(3.35) với kết quả được xác định bởi (3.36):
3 136H% 100% 99.83%408.7×
= = (3.36)
Kết quả cho thấy phương pháp IB-SMC đã khai thác được gần như hoàn toàn
năng lượng của PVg ở mọi thời điểm. Các kết quả trên hình 3. 16 cũng đã cho thấy
đường ppv(t) luôn bám đường Pmpp(t) ở cả những thời điểm không có sự biến thiên
của G (duy trì ổn định tĩnh) hoặc ở những thời điểm có sự tăng, giảm của G (đảm
bảo ổn định động) trong suốt quá trình vận hành PVg.
3.3.2 Phương pháp IB-AVC
3.3.2.1 Nguyên lý chung của phương pháp IB-AVC
Phương pháp IB-AVC sử dụng kỹ thuật AVC để đưa vpv từ trạng thái vận
hành bất kỳ về giá trị điện áp tính toán được của MPPT tại mỗi thời điểm nhờ sử
dụng kỹ thuật IB đã trình bày trong chương 2. Điều này có nghĩa là với cấu trúc
điều khiển BBĐ DC/DC trên hình 3. 1, đích điều khiển được thiết lập về điện áp ở
đầu vào BBĐ tương ứng với mref =Vmpp. Phương pháp này khác biệt với các phương
pháp trước đây ở chỗ đích điều khiển là Vmpp chính xác tại MPP được xác định
trước và không đổi nếu không có sự biến thiên về các giá trị của (G, T).
Với phân tích trên, cấu trúc điều khiển theo phương pháp IB-AVC dù áp dụng
cho BBĐ DC/DC buck hay BBĐ DC/DC boost cũng đều có cấu trúc mạch vòng
điều khiển dòng điện ở vòng trong và mạch vòng điều khiển điện áp ở vòng ngoài
như mô tả trên hình 3. 17 [46], [56], [60], [62].
Hình 3. 17 Mạch vòng điều khiển PVg theo phương pháp IB-AVC
-
PVg
BBĐ DC/DC
Vmpp
vpv
Bộ điều khiển
điện áp +
iLref
+
- iL
Bộ điều khiển dòng
điện
Bộ phát xung
d
CS1
DCbus
SW Cuộn cảm
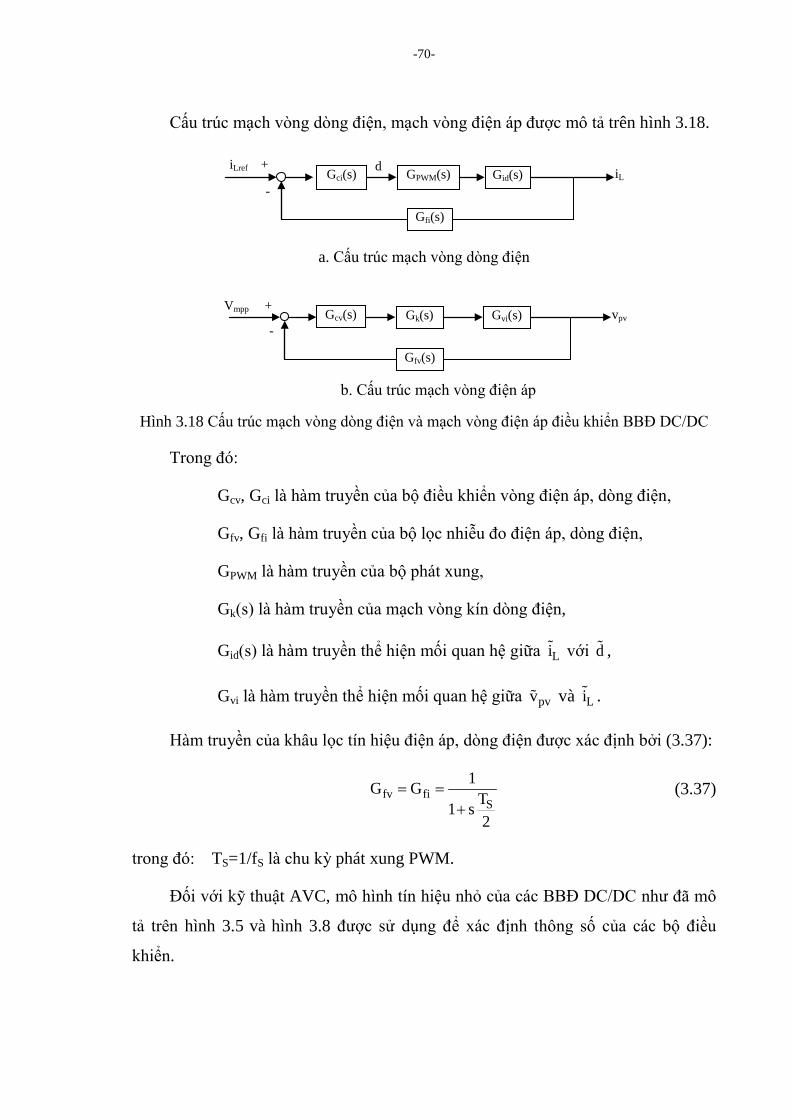
-70-
Cấu trúc mạch vòng dòng điện, mạch vòng điện áp được mô tả trên hình 3.18.
a. Cấu trúc mạch vòng dòng điện
b. Cấu trúc mạch vòng điện áp
Hình 3.18 Cấu trúc mạch vòng dòng điện và mạch vòng điện áp điều khiển BBĐ DC/DC
Trong đó:
Gcv, Gci là hàm truyền của bộ điều khiển vòng điện áp, dòng điện,
Gfv, Gfi là hàm truyền của bộ lọc nhiễu đo điện áp, dòng điện,
GPWM là hàm truyền của bộ phát xung,
Gk(s) là hàm truyền của mạch vòng kín dòng điện,
Gid(s) là hàm truyền thể hiện mối quan hệ giữa Li với d ,
Gvi là hàm truyền thể hiện mối quan hệ giữa pvv và Li .
Hàm truyền của khâu lọc tín hiệu điện áp, dòng điện được xác định bởi (3.37):
fv fiS
1G G T1 s2
= =+
(3.37)
trong đó: TS=1/fS là chu kỳ phát xung PWM.
Đối với kỹ thuật AVC, mô hình tín hiệu nhỏ của các BBĐ DC/DC như đã mô
tả trên hình 3.5 và hình 3.8 được sử dụng để xác định thông số của các bộ điều
khiển.
Gci(s) GPWM(s) Gid(s) +
-
iLref iL d
Gfi(s)
Gcv(s) Gk(s) Gvi(s) +
-
Vmpp vpv
Gfv(s)
-71-
3.3.2.2 Phương pháp IB-AVC cho BBĐ DC/DC buck
Mạch vòng dòng điện
Thay (3.9) vào (3.10) ta có (3.38) [46], [56], [60], [62]:
L Ldc L L dc pv pv dc
d(I i )R (I i ) L (V v )(D d) Vdt−
− + = + − −
⇔ Ldc L dc pv dc L pv pv pv dc
diR i L V D R I V d v D v d Vdt
− − = − − + − −
(3.38)
Viết lại (3.38) với điều kiện V0=DVpv - RdcIL lược bớt thành phần vô cùng bé
pvv d và sử dụng biến đổi Laplace, có (3.39):
dc dc L pv pv(R sL )i V d v D+ = −
(3.39)
Với vòng điều khiển dòng điện, coi rằng vpv biến thiên không nhanh so với sự
biến thiên của dòng điện (coi 0v~pv = với mạch vòng dòng điện) ta có hàm truyền
quan hệ giữa Li với d được xác định theo (3.40):
pvLid
dc dc
ViGR sLd
= =+
(3.40)
Hàm truyền xung PWM được xác định gần đúng theo (3.41) [96]:
PWMS
1G T1 s2
=+
(3.41)
Hàm truyền hệ hở của mạch vòng dòng điện được xác định bởi (3.42):
mpp
dcih ci id PWM fi ci
dcS
dc
VRG G G G G G L(1 s )(1 sT )
R
= =+ +
(3.42)
Bộ điều khiển Gci cho mạch vòng dòng điện được xác định bởi (3.43) [9]:
iici ip
KG Ks
= + (3.43)
-72-
trong đó: dcip
mpp S
LK ,2V T
= dcii
mpp S
RK2V T
=
Với thông số bộ điều khiển dòng điện Gci đã lựa chọn như (3.43), hàm truyền
Gk cho mạch vòng kín của dòng điện được xác định bởi (3.44):
ihk
ih
G (s)G (s)1 G (s)
=+
k 2 2
S S
1G (s)1 2T s 2T s
⇔ =+ +
(3.44)
Mạch vòng điện áp
Trong bài toán xây dựng bộ điều khiển, mô hình Thevenin mạch điện tương
đương của PVg có dạng như hình 3. 19, trong đó nguồn áp tương đương Veq thay
thế cho nguồn dòng, điện trở tương đương Req thay cho Rp và RS thông qua phương
trình (3.45) và (3.46) [56], [61]:
eq ph D pV (I I )R= − (3.45)
eq p SR R R= + (3.46)
Hình 3. 19 Mô hình Thevenin mạch điện tương đương của PVg
Thế hệ phương trình (3.9) vào phương trình (3.13) và sử dụng toán tử hóa
Laplace ta có phương trình (3.47):
pvpv L
dvi C i d
dt= +
eq pv pvpv pv L L L L
eq
V V vC v s I D I d i D i d
R− −
⇔ = + − − +
(3.47)
+
Req
- Veq
ipv
vpv
+
-
vpv
ipv RS
Rp
Iph-ID
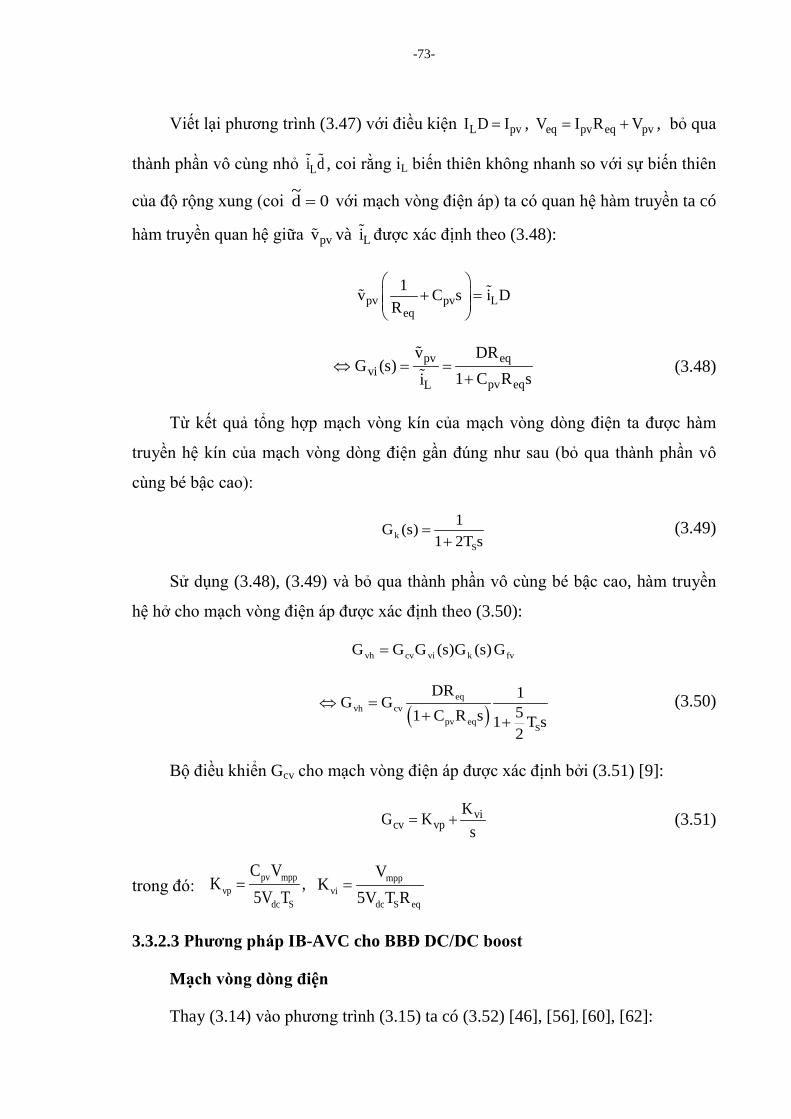
-73-
Viết lại phương trình (3.47) với điều kiện L pvI D I= , eq pv eq pvV I R V= + , bỏ qua
thành phần vô cùng nhỏ Li d , coi rằng iL biến thiên không nhanh so với sự biến thiên
của độ rộng xung (coi 0d~ = với mạch vòng điện áp) ta có quan hệ hàm truyền ta có
hàm truyền quan hệ giữa pvv và Li được xác định theo (3.48):
pv pv Leq
1v C s i DR
+ =
pv eq
vipv eqL
v DRG (s)
1 C R si⇔ = =
+
(3.48)
Từ kết quả tổng hợp mạch vòng kín của mạch vòng dòng điện ta được hàm
truyền hệ kín của mạch vòng dòng điện gần đúng như sau (bỏ qua thành phần vô
cùng bé bậc cao):
kS
1G (s)1 2T s
=+
(3.49)
Sử dụng (3.48), (3.49) và bỏ qua thành phần vô cùng bé bậc cao, hàm truyền
hệ hở cho mạch vòng điện áp được xác định theo (3.50):
vh cv vi k fvG G G (s)G (s)G=
( )eq
vh cvpv eq
S
DR 1G G 51 C R s 1 T s2
⇔ =+ +
(3.50)
Bộ điều khiển Gcv cho mạch vòng điện áp được xác định bởi (3.51) [9]:
vicv vp
KG Ks
= + (3.51)
trong đó: pv mppvp
dc S
C VK ,
5V T= mpp
vidc S eq
VK
5V T R=
3.3.2.3 Phương pháp IB-AVC cho BBĐ DC/DC boost
Mạch vòng dòng điện
Thay (3.14) vào phương trình (3.15) ta có (3.52) [46], [56], [60], [62]:

-74-
L Ldc L L dc pv pv dc
d(I i )R (I i ) L V v (1 D d)Vdt−
− + = + − − +
(3.52)
Viết lại phương trình (3.52) với điều kiện pv dc dc LV (1 D)V R I= − + , coi rằng
vpv biến thiên không nhanh so với sự biến thiên của dòng điện (coi 0v~pv = với
mạch vòng dòng điện) và sử dụng biến đổi Laplace, ta có hàm truyền ta có hàm
truyền quan hệ giữa Li với d được xác định theo (3.53):
dc dc L pv dc(R sL )i v V d+ + =
dcL
iddc dc
ViGR sLd
⇔ = =+
(3.53)
Hàm truyền hệ hở của mạch vòng dòng điện được xác định bởi (3.54):
dc
dcih ci id PWM fi ci
dc S
dc
VR 1G G G G G G L 1 T s1 sR
= =++
(3.54)
Bộ điều khiển Gci cho mạch vòng dòng điện được xác định bởi (3.55) [9]:
iici ip
KG Ks
= + (3.55)
trong đó: dcip
dc S
LK ,2V T
= dcii
dc S
RK2V T
=
Với thông số bộ điều khiển dòng điện Gci đã lựa chọn như (3.55), hàm truyền
Gk cho mạch vòng kín của dòng điện được xác định bởi (3.56):
ihk
ih
G (s)G (s)1 G (s)
=+
k 2 2
S S
1G (s)1 2T s 2T s
⇔ =+ +
(3.56)
Mạch vòng điện áp
Thế (3.14) vào (3.13) và sử dụng toán tử hóa Laplace có (3.57):
-75-
pvpv pv L
dvi C i
dt= +
eq pv pv
pv pv L Leq
V V vsC v I i
R− −
⇔ = + −
(3.57)
Viết lại (3.57) với điều kiện L pvI I= , eq pv eq pvV I R V= + có quan hệ hàm truyền
điện áp với dòng điện trên cuộn cảm:
pv pv Leq
1v ( C s) iR
+ =
pv eq
vipv eqL
v RG
1 C R si⇔ = =
+
(3.58)
Từ kết quả tổng hợp mạch vòng kín của mạch vòng dòng điện ta được hàm
truyền hệ kín của mạch vòng dòng điện gần đúng như sau (bỏ qua thành phần vô
cùng bé bậc cao):
kS
1G (s)1 2T s
=+
(3.59)
Sử dụng (3.58) và (3.59), ta có hàm truyền hệ hở cho mạch vòng điện áp:
vh cv vi k fvG G G (s)G (s)G=
eq
vh cvpv eq
S
R 1G G 51 C R s 1 T s2
⇔ =+ +
(3.60)
Bộ điều khiển Gcv cho mạch vòng điện áp được xác định bởi (3.61) [9]:
vicv vp
KG Ks
= + (3.61)
trong đó: pvvp
S
CK ,
5T= vi
S eq
1K5T R
=
3.3.2.4 Chiến lược điều khiển BBĐ DC/DC theo phương pháp IB-AVC
Như đã phân tích trong những nội dung trên, kỹ thuật AVC được sử dụng để
đưa điện áp ở đầu vào BBĐ DC/DC về giá trị mong muốn do kỹ thuật IB cung cấp.
-76-
Thông qua việc sử dụng mô hình tín hiệu nhỏ, các thông số của bộ điều khiển cho
mạch vòng điện áp đã được xác định và đều phải thay đổi theo trạng thái vận hành
hiện thời (Vmpp, Req) nên sẽ là bộ điều khiển thích nghi thông số. Với bộ thông số
điều khiển đã xác định cho mạch vòng dòng điện và điện áp, hằng số thời gian của
các bộ điều khiển được xác định theo (3.62) và (3.63).
Hằng số thời gian của mạch vòng dòng điện:
dci
dc
LTR
= (3.62)
Hằng số thời gian của mạch vòng điện áp:
v pv eqT C R= (3.63)
Trong đó, Req của PVg từ cỡ panel trở lên luôn nhận giá trị cỡ trên 1 kΩ, Ldc
thường nhận giá trị (10-2 ÷ 10-3) H, Rdc nhận giá trị cỡ từ 10-2 đến vài Ω. Đồng thời
Req có xu hướng tăng khi G giảm. Như vậy, có thể lựa chọn các thông số BBĐ để
giá trị của Ti luôn đảm bảo nhỏ hơn Tv trong mọi điều kiện vận hành. Phân tích này
đã cho thấy việc thiết kế các bộ điều khiển đã đáp ứng được các yêu cầu kỹ thuật
khi sử dụng cấu trúc hai mạch vòng xếp chồng.
Chiến lược điều khiển theo phương pháp IB-AVC được mô tả trên hình 3.20.
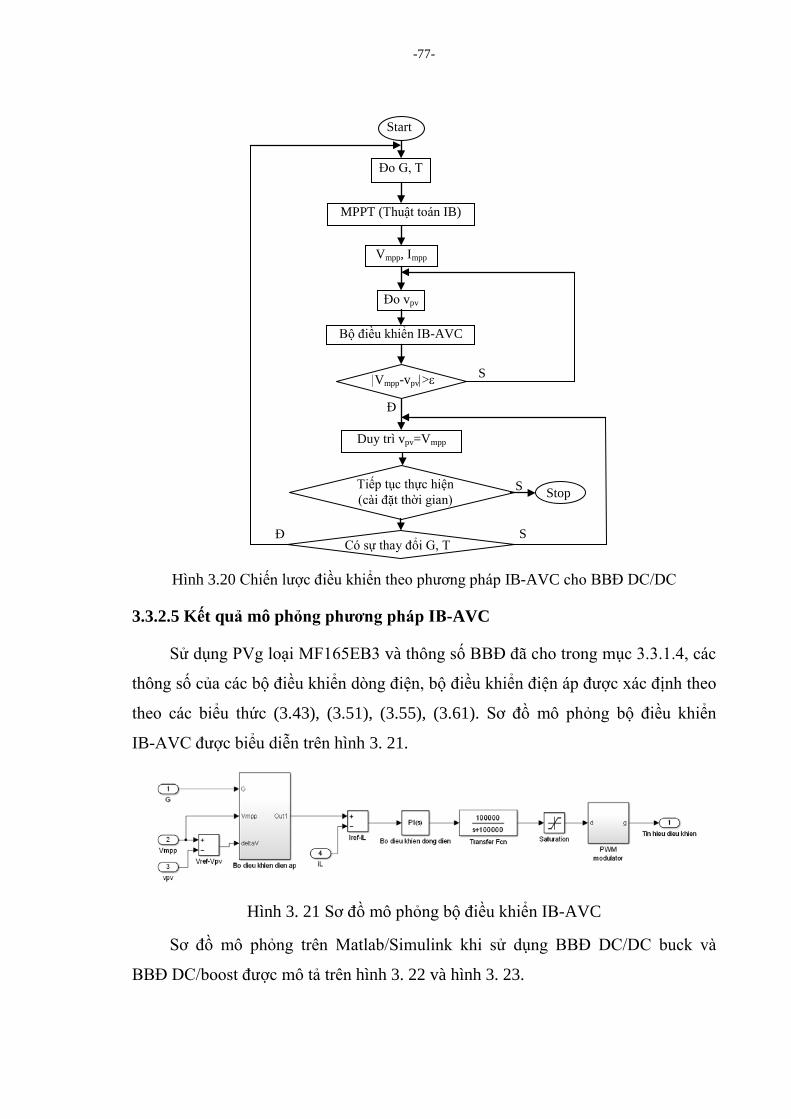
-77-
Hình 3.20 Chiến lược điều khiển theo phương pháp IB-AVC cho BBĐ DC/DC
3.3.2.5 Kết quả mô phỏng phương pháp IB-AVC
Sử dụng PVg loại MF165EB3 và thông số BBĐ đã cho trong mục 3.3.1.4, các
thông số của các bộ điều khiển dòng điện, bộ điều khiển điện áp được xác định theo
theo các biểu thức (3.43), (3.51), (3.55), (3.61). Sơ đồ mô phỏng bộ điều khiển
IB-AVC được biểu diễn trên hình 3. 21.
Hình 3. 21 Sơ đồ mô phỏng bộ điều khiển IB-AVC
Sơ đồ mô phỏng trên Matlab/Simulink khi sử dụng BBĐ DC/DC buck và
BBĐ DC/boost được mô tả trên hình 3. 22 và hình 3. 23.
Start
Đo G, T
MPPT (Thuật toán IB)
Vmpp, Impp
Tiếp tục thực hiện (cài đặt thời gian) Stop
S
Duy trì vpv=Vmpp
Có sự thay đổi G, T Đ
Bộ điều khiển IB-AVC
Đo vpv
S
S
|Vmpp-vpv|>ε
Đ
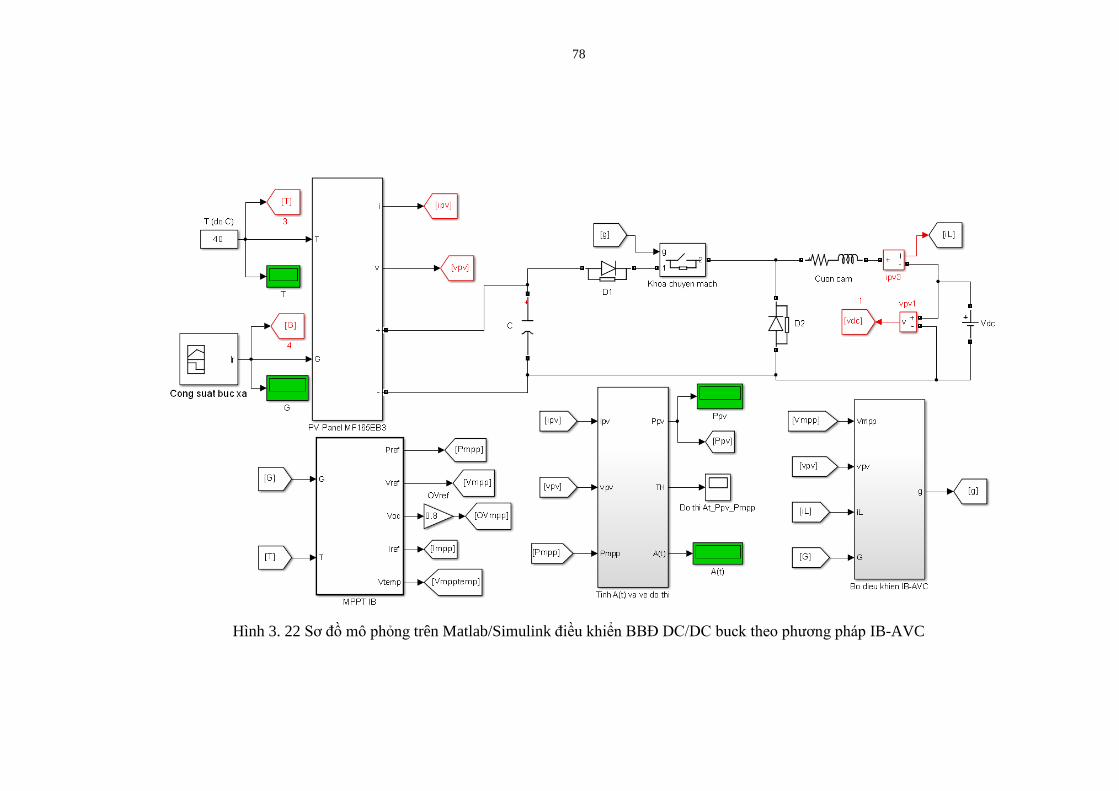
78
Hình 3. 22 Sơ đồ mô phỏng trên Matlab/Simulink điều khiển BBĐ DC/DC buck theo phương pháp IB-AVC
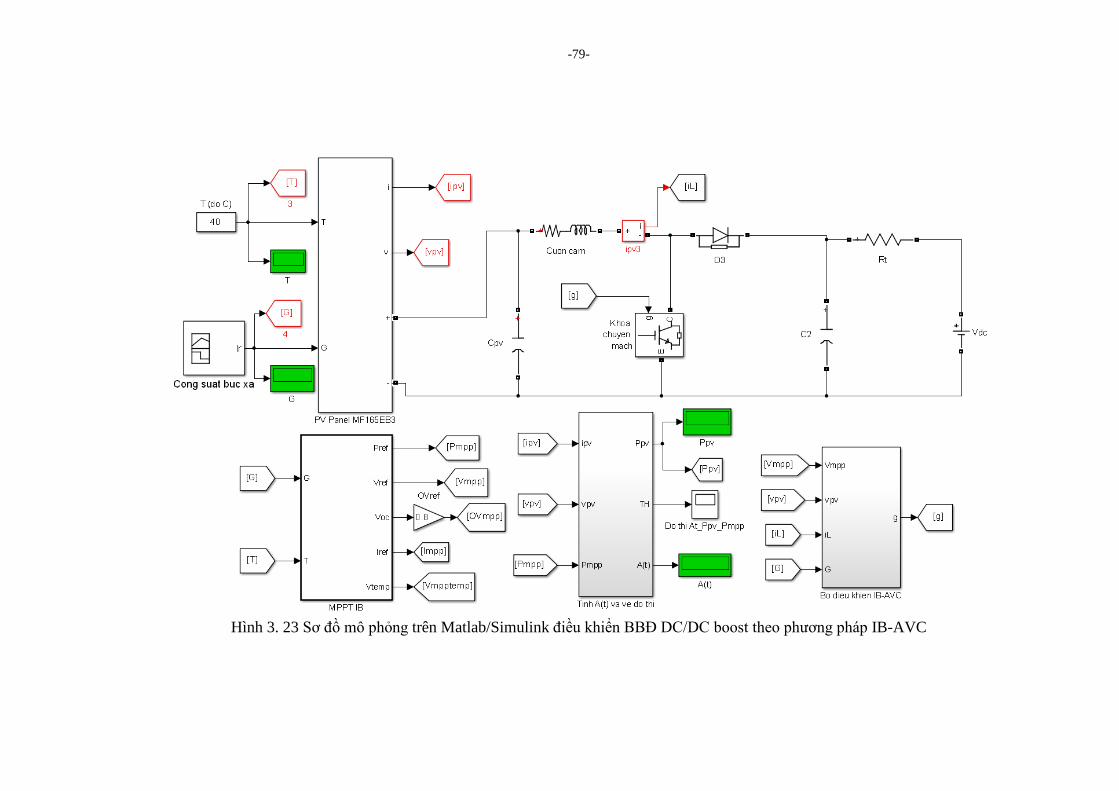
-79-
Hình 3. 23 Sơ đồ mô phỏng trên Matlab/Simulink điều khiển BBĐ DC/DC boost theo phương pháp IB-AVC
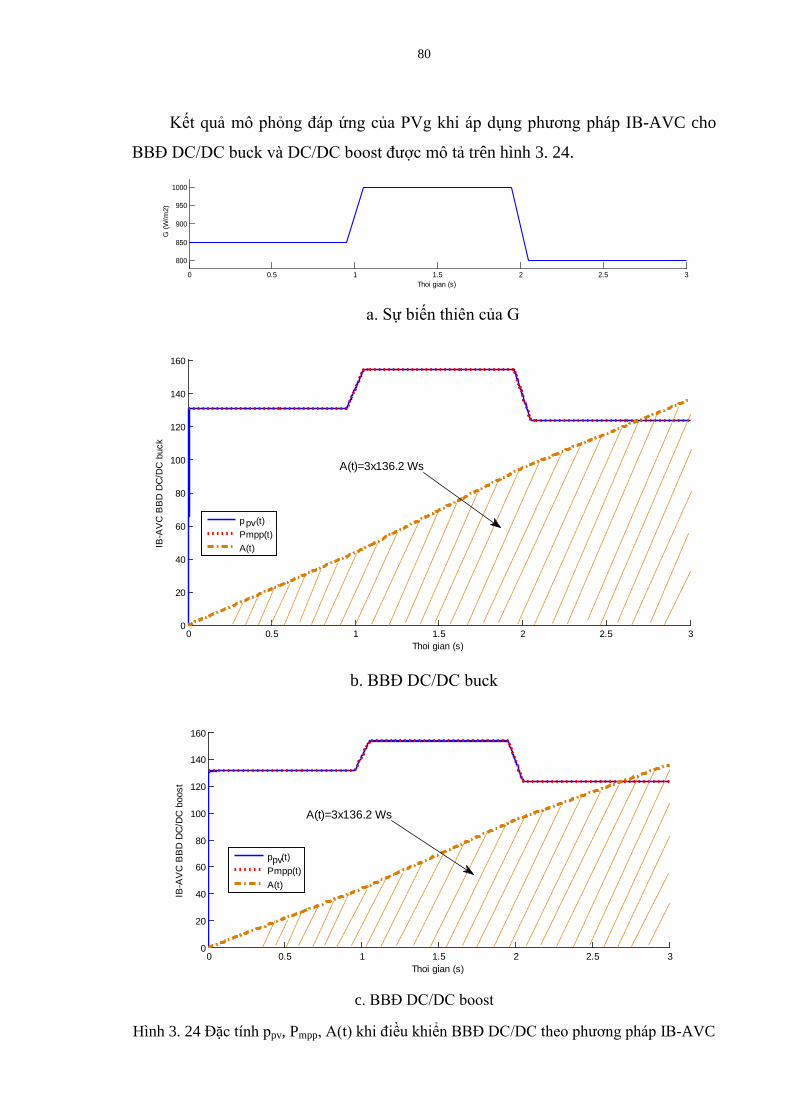
80
Kết quả mô phỏng đáp ứng của PVg khi áp dụng phương pháp IB-AVC cho
BBĐ DC/DC buck và DC/DC boost được mô tả trên hình 3. 24.
a. Sự biến thiên của G
b. BBĐ DC/DC buck
c. BBĐ DC/DC boost
Hình 3. 24 Đặc tính ppv, Pmpp, A(t) khi điều khiển BBĐ DC/DC theo phương pháp IB-AVC
0 0.5 1 1.5 2 2.5 3
800
850
900
950
1000
Thoi gian (s)
G (W
/m2)
0 0.5 1 1.5 2 2.5 30
20
40
60
80
100
120
140
160
Thoi gian (s)
IB-A
VC
BB
D D
C/D
C b
uck
p (t)Pmpp(t)A(t)
A(t)=3x136.2 Ws
pv
0 0.5 1 1.5 2 2.5 30
20
40
60
80
100
120
140
160
Thoi gian (s)
IB-A
VC
BB
D D
C/D
C b
oost
p (t)Pmpp(t)A(t)
pv
A(t)=3x136.2 Ws
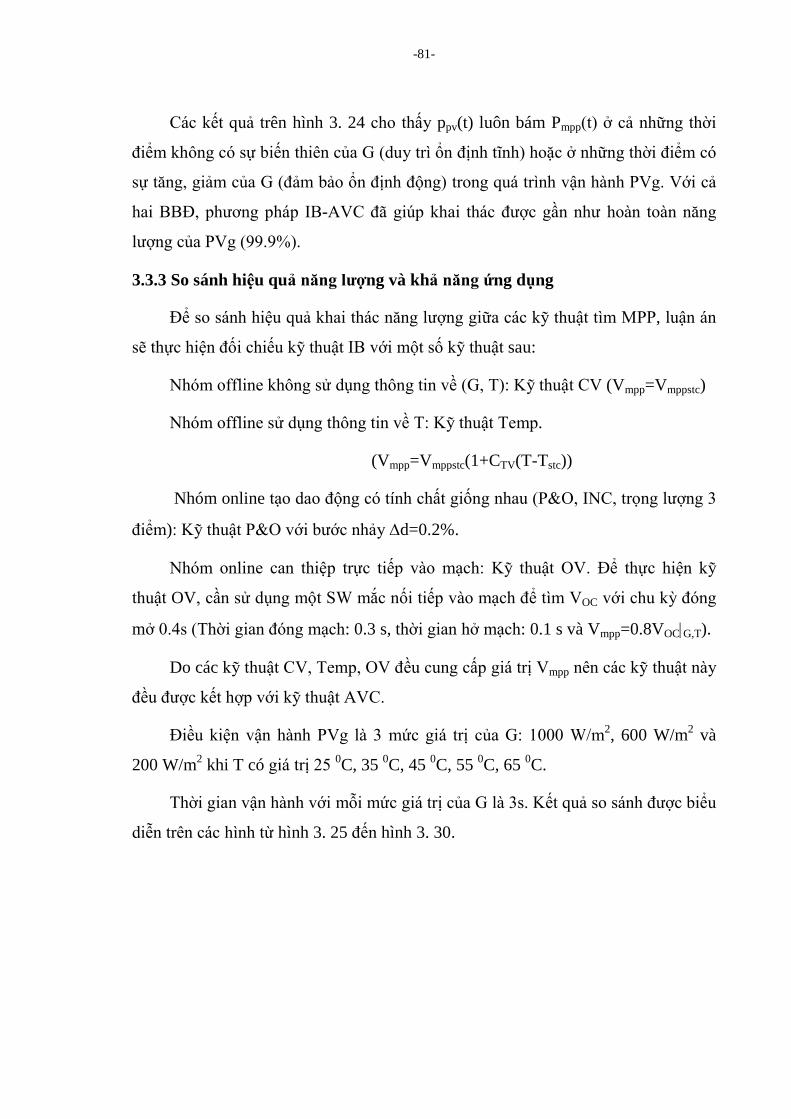
-81-
Các kết quả trên hình 3. 24 cho thấy ppv(t) luôn bám Pmpp(t) ở cả những thời
điểm không có sự biến thiên của G (duy trì ổn định tĩnh) hoặc ở những thời điểm có
sự tăng, giảm của G (đảm bảo ổn định động) trong quá trình vận hành PVg. Với cả
hai BBĐ, phương pháp IB-AVC đã giúp khai thác được gần như hoàn toàn năng
lượng của PVg (99.9%).
3.3.3 So sánh hiệu quả năng lượng và khả năng ứng dụng
Để so sánh hiệu quả khai thác năng lượng giữa các kỹ thuật tìm MPP, luận án
sẽ thực hiện đối chiếu kỹ thuật IB với một số kỹ thuật sau:
Nhóm offline không sử dụng thông tin về (G, T): Kỹ thuật CV (Vmpp=Vmppstc)
Nhóm offline sử dụng thông tin về T: Kỹ thuật Temp.
(Vmpp=Vmppstc(1+CTV(T-Tstc))
Nhóm online tạo dao động có tính chất giống nhau (P&O, INC, trọng lượng 3
điểm): Kỹ thuật P&O với bước nhảy ∆d=0.2%.
Nhóm online can thiệp trực tiếp vào mạch: Kỹ thuật OV. Để thực hiện kỹ
thuật OV, cần sử dụng một SW mắc nối tiếp vào mạch để tìm VOC với chu kỳ đóng
mở 0.4s (Thời gian đóng mạch: 0.3 s, thời gian hở mạch: 0.1 s và Vmpp=0.8VOC|G,T).
Do các kỹ thuật CV, Temp, OV đều cung cấp giá trị Vmpp nên các kỹ thuật này
đều được kết hợp với kỹ thuật AVC.
Điều kiện vận hành PVg là 3 mức giá trị của G: 1000 W/m2, 600 W/m2 và
200 W/m2 khi T có giá trị 25 0C, 35 0C, 45 0C, 55 0C, 65 0C.
Thời gian vận hành với mỗi mức giá trị của G là 3s. Kết quả so sánh được biểu
diễn trên các hình từ hình 3. 25 đến hình 3. 30.
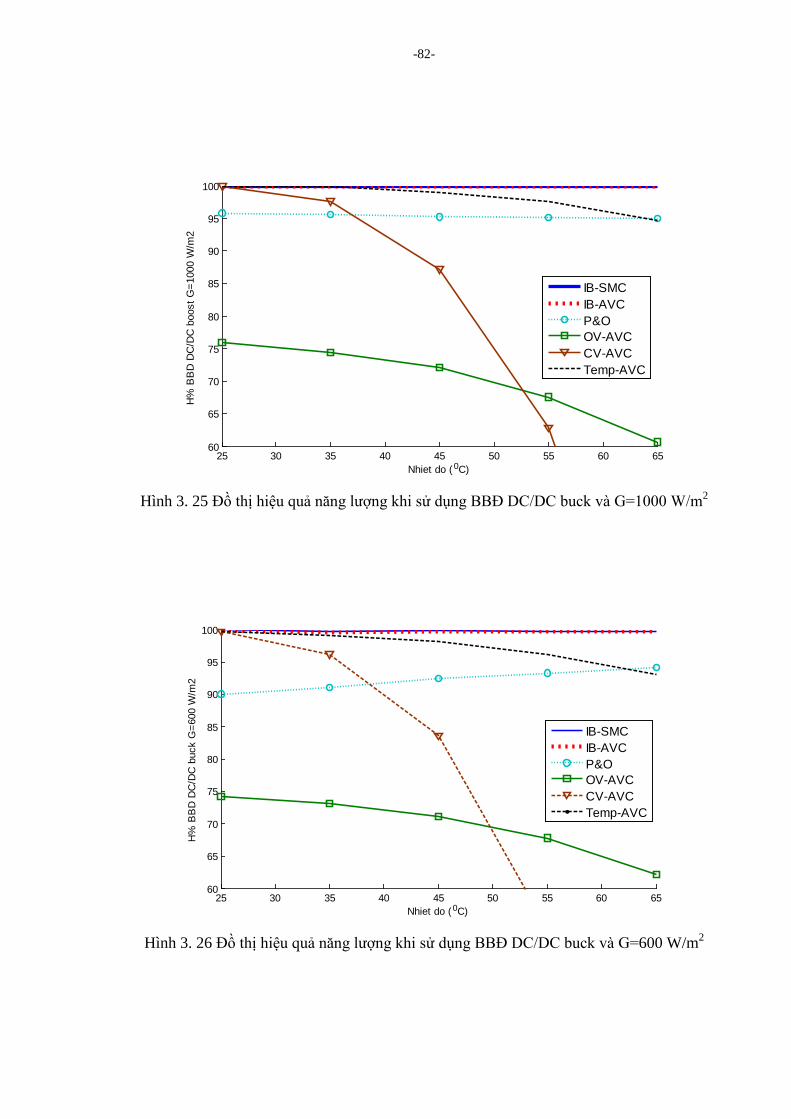
-82-
Hình 3. 25 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC buck và G=1000 W/m2
Hình 3. 26 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC buck và G=600 W/m2
25 30 35 40 45 50 55 60 6560
65
70
75
80
85
90
95
100
Nhiet do ( C)
H%
BB
D D
C/D
C b
oost
G=1
000
W/m
2
IB-SMCIB-AVCP&OOV-AVCCV-AVCTemp-AVC
0
25 30 35 40 45 50 55 60 6560
65
70
75
80
85
90
95
100
Nhiet do ( C)
H%
BB
D D
C/D
C b
uck
G=6
00 W
/m2
IB-SMCIB-AVCP&OOV-AVCCV-AVCTemp-AVC
0
-83-
Hình 3. 27 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC buck và G=200 W/m2
Hình 3. 28 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC boost và G=1000 W/m2
25 30 35 40 45 50 55 60 650
10
20
30
40
50
60
70
80
90
100
Nhiet do ( C)
H%
BB
D D
C/D
C b
uck
G=2
00 W
/m2
IB-SMCIB-AVCP&OOV-AVCCV-AVCTemp-AVC
0
25 30 35 40 45 50 55 60 6560
65
70
75
80
85
90
95
100
Nhiet do ( C)
H%
BB
D D
C/D
C b
oost
G=1
000
W/m
2
IB-SMCIB-AVCP&OOV-AVCCV-AVCTemp-AVC
0
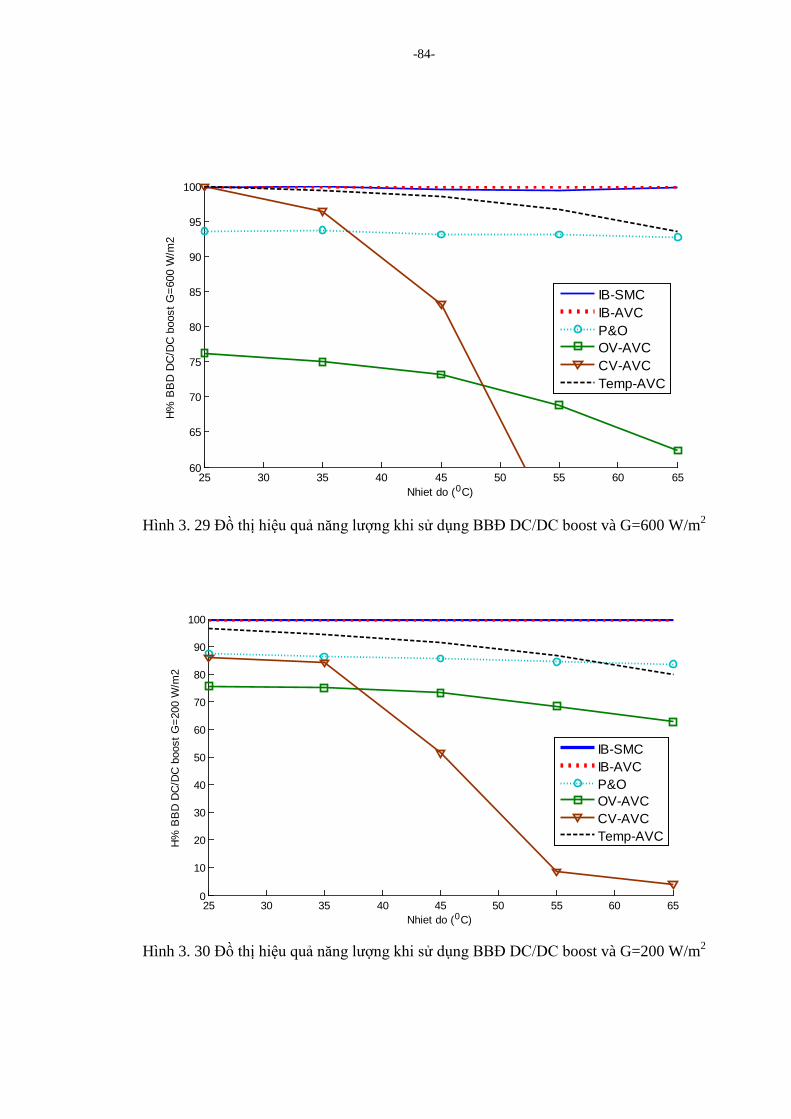
-84-
Hình 3. 29 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC boost và G=600 W/m2
Hình 3. 30 Đồ thị hiệu quả năng lượng khi sử dụng BBĐ DC/DC boost và G=200 W/m2
25 30 35 40 45 50 55 60 6560
65
70
75
80
85
90
95
100
Nhiet do ( C)
H%
BB
D D
C/D
C b
oost
G=6
00 W
/m2
IB-SMCIB-AVCP&OOV-AVCCV-AVCTemp-AVC
0
25 30 35 40 45 50 55 60 650
10
20
30
40
50
60
70
80
90
100
Nhiet do ( C)
H%
BB
D D
C/D
C b
oost
G=2
00 W
/m2
IB-SMCIB-AVCP&OOV-AVCCV-AVCTemp-AVC
0

-85-
Các đồ thị trên cho thấy MPPT sử dụng các kỹ thuật tìm MPP trước đây đã
bộc lộ những nhược điểm chỉ đạt hiệu quả năng lượng cao khi G gần với Gstc hoặc T
gần với Tstc. Điều này đã thể hiện đúng bản chất của các kỹ thuật tìm MPP truyền
thống như đã phân tích trong chương 1. Đồng thời, MPPT sử dụng kỹ thuật IB luôn
đem lại hiệu quả năng lượng cao nhất (gần như tuyệt đối) trong mọi điều kiện vận
hành về (G, T) và luôn cao hơn các kỹ thuật tìm MPP trước đây do có sự kết hợp
của mô hình đầy đủ của PVg với sự chủ động trong việc xác định sự biến thiên của
mức năng lượng đầu vào nhờ PYR và TempS. Điều này cũng cho thấy giải pháp
điều khiển sử dụng kỹ thuật IB trong MPPT kết hợp với kỹ thuật SMC hoặc AVC
sẽ giúp nâng cao khả năng khai thác năng lượng từ PVg, trong đó phương pháp
IB-SMC và IB-AVC cho hiệu quả năng lượng gần như tương đương nhau. Những
phân tích trên đã cho thấy hiệu quả khai thác năng lượng từ PVg chỉ phụ thuộc vào
kỹ thuật tìm MPP mà không phụ thuộc vào loại kỹ thuật điều khiển được sử dụng.
Mặt khác, các kết quả mô phỏng cho thấy dòng điện iC có thể được xem như
một dạng dòng điện xoay chiều xung vuông (với BBĐ DC/DC buck) hoặc xung tam
giác biên độ rất nhỏ (với BBĐ DC/DC boost) và có cùng tần số với tần số cắt của
bộ điều khiển (biểu diễn trên hình PL. 3). Kỹ thuật SMC yêu cầu độ chính xác cao
đối với các thiết bị đo lường để có được thông tin chính xác về dòng điện tức thời iC
và các giá trị của (G, T) trong khi các ứng dụng thực tế luôn gặp phải một số vấn đề
bất cập như: sai số của bản thân các thiết bị đo lường, độ trễ thời gian thu thập và
xử lý thông tin cũng như các hạn chế của thiết bị. Các vấn đề trên đều có thể khắc
phục được bằng các giải pháp kỹ thuật cao nhưng sẽ khiến cho giá thành toàn hệ
thống tăng lên rất nhiều. Khi những vấn đề về kỹ thuật và giá thành được khắc
phục, kỹ thuật SMC mới có thể áp dụng rộng rãi trong các hệ thống khai thác PVg.
Trong khi đó, việc điều khiển đưa điện áp ở đầu vào BBĐ DC/DC về giá trị
đặt đối với kỹ thuật AVC được thực hiện đơn giản hơn, mặc dù có sự dao động
xung quanh giá trị đặt với biên độ nhỏ nhưng sự dao động này khá tương đồng với
cách thức làm việc của PVg khi vpv luôn có xu hướng dao động dù chỉ có những
tương tác rất nhỏ khi tải thay đổi (do quá trình chuyển mạch SW gây nên). Hơn nữa,
giá trị của Vmpp cũng không thay đổi nhiều khi (G, T) có sai lệch nhất định nào đó
gây ra bởi sai số của các thiết bị đo lường và các tính toán trong MPPT.
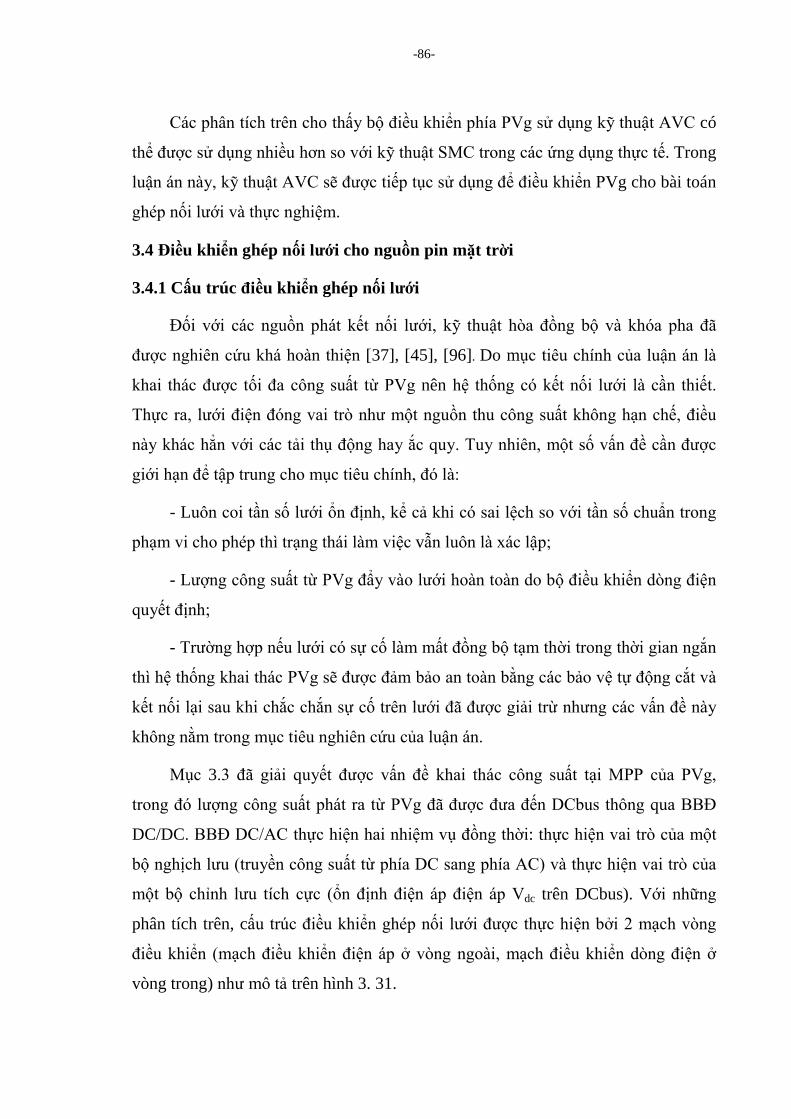
-86-
Các phân tích trên cho thấy bộ điều khiển phía PVg sử dụng kỹ thuật AVC có
thể được sử dụng nhiều hơn so với kỹ thuật SMC trong các ứng dụng thực tế. Trong
luận án này, kỹ thuật AVC sẽ được tiếp tục sử dụng để điều khiển PVg cho bài toán
ghép nối lưới và thực nghiệm.
3.4 Điều khiển ghép nối lưới cho nguồn pin mặt trời
3.4.1 Cấu trúc điều khiển ghép nối lưới
Đối với các nguồn phát kết nối lưới, kỹ thuật hòa đồng bộ và khóa pha đã
được nghiên cứu khá hoàn thiện [37], [45], [96]. Do mục tiêu chính của luận án là
khai thác được tối đa công suất từ PVg nên hệ thống có kết nối lưới là cần thiết.
Thực ra, lưới điện đóng vai trò như một nguồn thu công suất không hạn chế, điều
này khác hẳn với các tải thụ động hay ắc quy. Tuy nhiên, một số vấn đề cần được
giới hạn để tập trung cho mục tiêu chính, đó là:
- Luôn coi tần số lưới ổn định, kể cả khi có sai lệch so với tần số chuẩn trong
phạm vi cho phép thì trạng thái làm việc vẫn luôn là xác lập;
- Lượng công suất từ PVg đẩy vào lưới hoàn toàn do bộ điều khiển dòng điện
quyết định;
- Trường hợp nếu lưới có sự cố làm mất đồng bộ tạm thời trong thời gian ngắn
thì hệ thống khai thác PVg sẽ được đảm bảo an toàn bằng các bảo vệ tự động cắt và
kết nối lại sau khi chắc chắn sự cố trên lưới đã được giải trừ nhưng các vấn đề này
không nằm trong mục tiêu nghiên cứu của luận án.
Mục 3.3 đã giải quyết được vấn đề khai thác công suất tại MPP của PVg,
trong đó lượng công suất phát ra từ PVg đã được đưa đến DCbus thông qua BBĐ
DC/DC. BBĐ DC/AC thực hiện hai nhiệm vụ đồng thời: thực hiện vai trò của một
bộ nghịch lưu (truyền công suất từ phía DC sang phía AC) và thực hiện vai trò của
một bộ chỉnh lưu tích cực (ổn định điện áp điện áp Vdc trên DCbus). Với những
phân tích trên, cấu trúc điều khiển ghép nối lưới được thực hiện bởi 2 mạch vòng
điều khiển (mạch điều khiển điện áp ở vòng ngoài, mạch điều khiển dòng điện ở
vòng trong) như mô tả trên hình 3. 31.
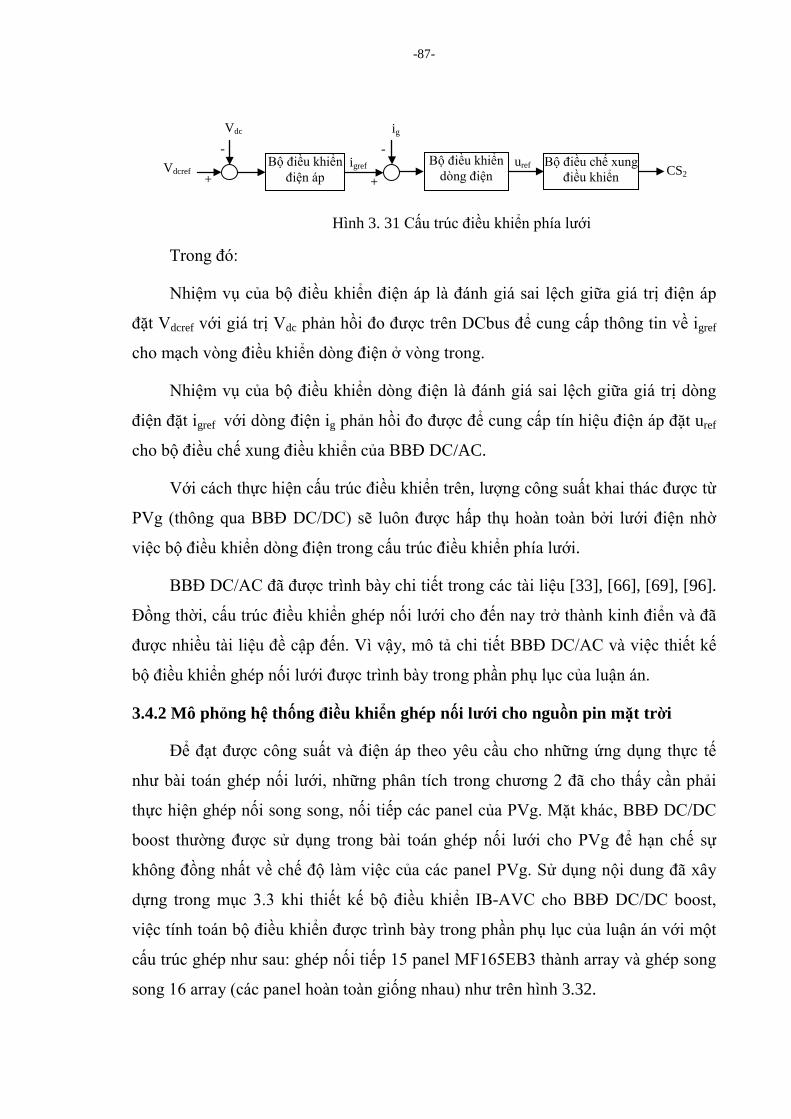
-87-
Hình 3. 31 Cấu trúc điều khiển phía lưới
Trong đó:
Nhiệm vụ của bộ điều khiển điện áp là đánh giá sai lệch giữa giá trị điện áp
đặt Vdcref với giá trị Vdc phản hồi đo được trên DCbus để cung cấp thông tin về igref
cho mạch vòng điều khiển dòng điện ở vòng trong.
Nhiệm vụ của bộ điều khiển dòng điện là đánh giá sai lệch giữa giá trị dòng
điện đặt igref với dòng điện ig phản hồi đo được để cung cấp tín hiệu điện áp đặt uref
cho bộ điều chế xung điều khiển của BBĐ DC/AC.
Với cách thực hiện cấu trúc điều khiển trên, lượng công suất khai thác được từ
PVg (thông qua BBĐ DC/DC) sẽ luôn được hấp thụ hoàn toàn bởi lưới điện nhờ
việc bộ điều khiển dòng điện trong cấu trúc điều khiển phía lưới.
BBĐ DC/AC đã được trình bày chi tiết trong các tài liệu [33], [66], [69], [96].
Đồng thời, cấu trúc điều khiển ghép nối lưới cho đến nay trở thành kinh điển và đã
được nhiều tài liệu đề cập đến. Vì vậy, mô tả chi tiết BBĐ DC/AC và việc thiết kế
bộ điều khiển ghép nối lưới được trình bày trong phần phụ lục của luận án.
3.4.2 Mô phỏng hệ thống điều khiển ghép nối lưới cho nguồn pin mặt trời
Để đạt được công suất và điện áp theo yêu cầu cho những ứng dụng thực tế
như bài toán ghép nối lưới, những phân tích trong chương 2 đã cho thấy cần phải
thực hiện ghép nối song song, nối tiếp các panel của PVg. Mặt khác, BBĐ DC/DC
boost thường được sử dụng trong bài toán ghép nối lưới cho PVg để hạn chế sự
không đồng nhất về chế độ làm việc của các panel PVg. Sử dụng nội dung đã xây
dựng trong mục 3.3 khi thiết kế bộ điều khiển IB-AVC cho BBĐ DC/DC boost,
việc tính toán bộ điều khiển được trình bày trong phần phụ lục của luận án với một
cấu trúc ghép như sau: ghép nối tiếp 15 panel MF165EB3 thành array và ghép song
song 16 array (các panel hoàn toàn giống nhau) như trên hình 3.32.
Vdc
Bộ điều khiển điện áp
Bộ điều khiển dòng điện
Bộ điều chế xung điều khiển
igref Vdcref CS2 +
-
ig
+
- uref

-88-
Hình 3.32 Cấu trúc ghép nối PVg từ các panel MF165EB3
Giá trị các thông số của cấu trúc ghép được cho trong bảng 3. 1.
Bảng 3. 1 Giá trị các thông số mô phỏng của cấu trúc PVg ghép
Loại thông số Ký hiệu Giá trị
Các thông số đã biết
ISC 117.76 A
VOC 456 V
Vmpp 363 V
Impp 109.28 A
Pmpp 39.6 kW
CTI 0.057 %/0C
CTV -0.346 %/0C
CTP -0.478 %/0C
Các thông số được xác định
bởi thuật toán Newton-
Raphson
Iph 117.79 A
I0 1.65x10-6 A
Vt 25.215 V
RS 0.2354 Ω
Rp 1098.84 Ω
Đồ thị vpv-ipv và vpv-ppv của cấu trúc PVg ghép được biểu diễn trên hình 3.33.
Panel
15
vpv
ipv
+
-
Array 1 Array 2 Array 15 Array 16
Panel
2
Panel
1
Panel
15
Panel
2
Panel
1
Panel
15
Panel 2
Panel 1
Panel
15
Panel
2
Panel
1

-89-
a. G biến thiên b. T biến thiên
Hình 3.33 Đặc tính vpv-ipv và vpv-ppv của cấu trúc PVg ghép
Hàm số n(T) được xác định theo (3.64) (đã được xác định trong chương 2):
2stc stc
9n(T) 1 0.008017 (T T ) (T T )400000
= − − + − (3.64)
Thông số BBĐ DC/DC boost: Rdc= 0.1 Ω, Ldc= 0.02 H, Cpv=10-3 F.
Thông số DCbus: Cdc=5x10-3 F, Vdc=804 V.
Tần số đóng cắt: fS=50 kHz.
Thông số MBA: SđmBA= 40 kVA, RBA = 0.00019 Ω, LBA = 8.84x10-4 H.
Lưới điện: Mạng điện 22 kV, tần số cơ bản 50 Hz.
Bộ lọc: Rlọc= 0.0001 Ω, Llọc= 4.5x10-4 H.
Thông số G và T: G được xét trong kịch bản cho trên hình 3. 12, T=40 0C.
Thông số điều khiển BBĐ DC/AC:
Bộ điều khiển dòng điện: Kii= 1.825, Kip=0.83,
Bộ điều khiển điện áp: Kui=66.1, Kup= 2.68.
0 100 200 300 4000
20
40
60
80
100
120
Don
g di
en (A
)
0 100 200 300 4000
10
20
30
40
Dien ap (V)
Con
g su
at (k
W)
600W/m800W/m1000W/m 2
22
0 100 200 300 4000
20
40
60
80
100
120
Don
g di
en (A
)
0 100 200 300 4000
10
20
30
40
Dien ap (V)C
ong
suat
(kW
)
45 C35 C25 C0
00

-90-
Sơ đồ mô phỏng khối PVg đã được biểu diễn trên hình 3. 15a,
Sơ đồ mô phỏng khối DC/DC boost đã được biểu diễn trên hình 3. 23,
Sơ đồ mô phỏng toàn hệ thống trên Matlab/Simulink được biểu diễn trên hình
3.34. Trong đó, sơ đồ khối mô phỏng bộ điều khiển ghép nối lưới và thiết lập thông
số điều khiển cho BBĐ DC/AC được biểu diễn trên hình PL. 12 và hình PL. 13.

91
Hình 3.34 Cấu trúc mô phỏng toàn hệ thống trên Matlab/Simulink
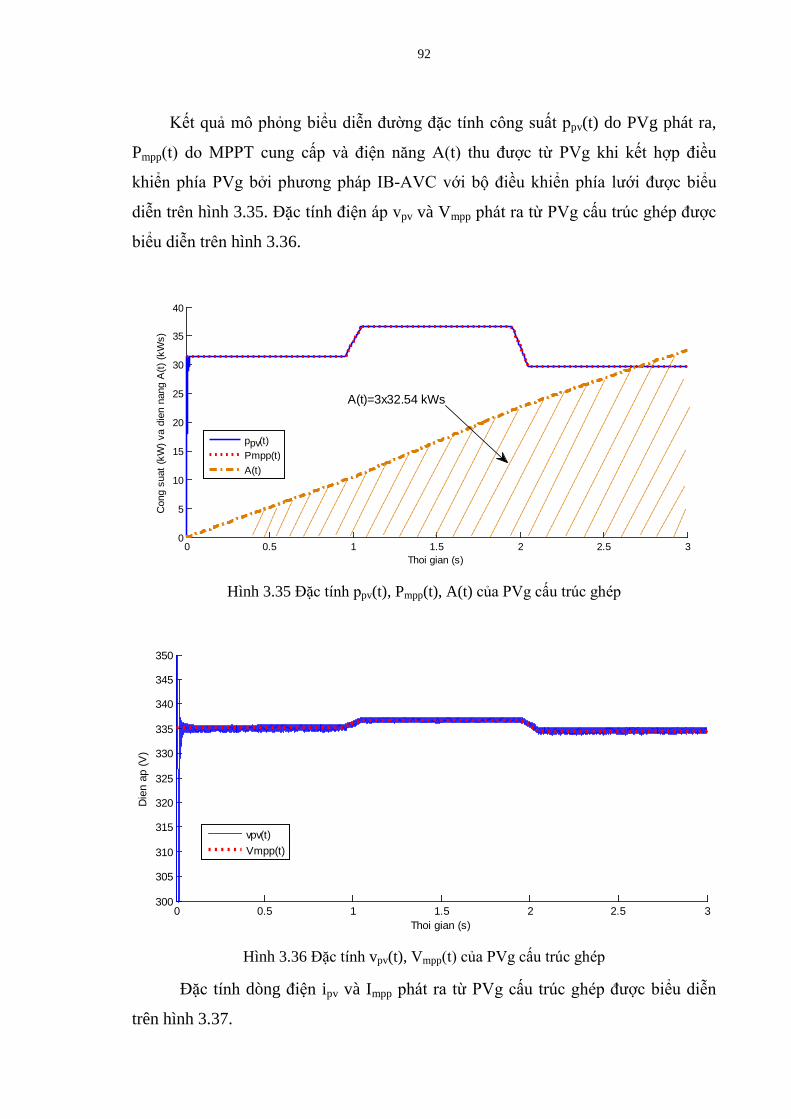
92
Kết quả mô phỏng biểu diễn đường đặc tính công suất ppv(t) do PVg phát ra,
Pmpp(t) do MPPT cung cấp và điện năng A(t) thu được từ PVg khi kết hợp điều
khiển phía PVg bởi phương pháp IB-AVC với bộ điều khiển phía lưới được biểu
diễn trên hình 3.35. Đặc tính điện áp vpv và Vmpp phát ra từ PVg cấu trúc ghép được
biểu diễn trên hình 3.36.
Hình 3.35 Đặc tính ppv(t), Pmpp(t), A(t) của PVg cấu trúc ghép
Hình 3.36 Đặc tính vpv(t), Vmpp(t) của PVg cấu trúc ghép
Đặc tính dòng điện ipv và Impp phát ra từ PVg cấu trúc ghép được biểu diễn
trên hình 3.37.
0 0.5 1 1.5 2 2.5 30
5
10
15
20
25
30
35
40
Thoi gian (s)
Con
g su
at (k
W) v
a di
en n
ang
A(t)
(kW
s)
p (t)Pmpp(t)A(t)
A(t)=3x32.54 kWs
pv
0 0.5 1 1.5 2 2.5 3300
305
310
315
320
325
330
335
340
345
350
Thoi gian (s)
Die
n ap
(V)
vpv(t)Vmpp(t)
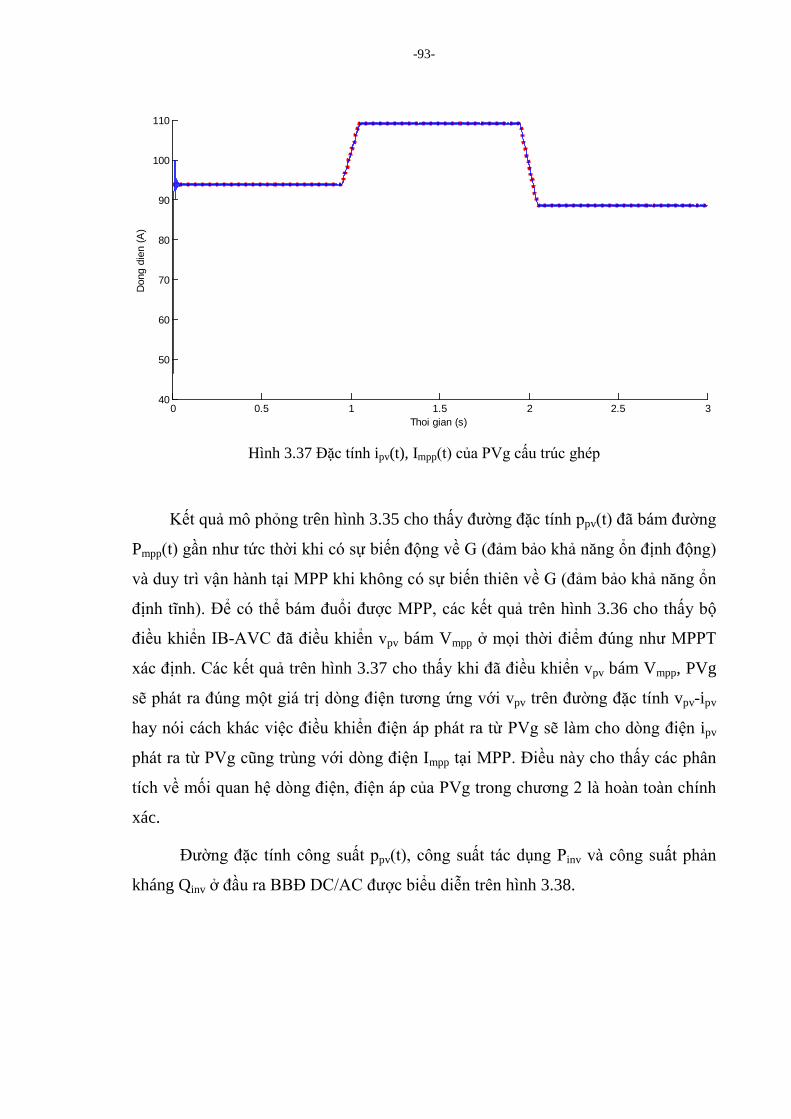
-93-
Hình 3.37 Đặc tính ipv(t), Impp(t) của PVg cấu trúc ghép
Kết quả mô phỏng trên hình 3.35 cho thấy đường đặc tính ppv(t) đã bám đường
Pmpp(t) gần như tức thời khi có sự biến động về G (đảm bảo khả năng ổn định động)
và duy trì vận hành tại MPP khi không có sự biến thiên về G (đảm bảo khả năng ổn
định tĩnh). Để có thể bám đuổi được MPP, các kết quả trên hình 3.36 cho thấy bộ
điều khiển IB-AVC đã điều khiển vpv bám Vmpp ở mọi thời điểm đúng như MPPT
xác định. Các kết quả trên hình 3.37 cho thấy khi đã điều khiển vpv bám Vmpp, PVg
sẽ phát ra đúng một giá trị dòng điện tương ứng với vpv trên đường đặc tính vpv-ipv
hay nói cách khác việc điều khiển điện áp phát ra từ PVg sẽ làm cho dòng điện ipv
phát ra từ PVg cũng trùng với dòng điện Impp tại MPP. Điều này cho thấy các phân
tích về mối quan hệ dòng điện, điện áp của PVg trong chương 2 là hoàn toàn chính
xác.
Đường đặc tính công suất ppv(t), công suất tác dụng Pinv và công suất phản
kháng Qinv ở đầu ra BBĐ DC/AC được biểu diễn trên hình 3.38.
0 0.5 1 1.5 2 2.5 340
50
60
70
80
90
100
110
Thoi gian (s)
Don
g di
en (A
)
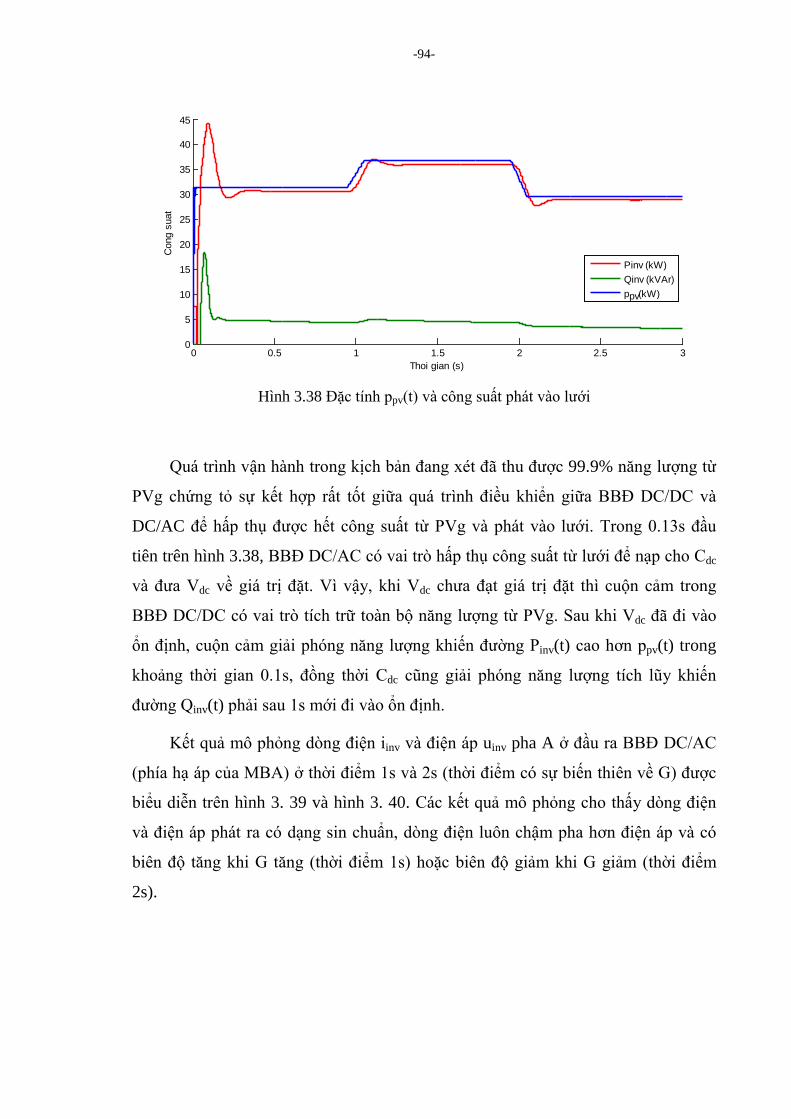
-94-
Hình 3.38 Đặc tính ppv(t) và công suất phát vào lưới
Quá trình vận hành trong kịch bản đang xét đã thu được 99.9% năng lượng từ
PVg chứng tỏ sự kết hợp rất tốt giữa quá trình điều khiển giữa BBĐ DC/DC và
DC/AC để hấp thụ được hết công suất từ PVg và phát vào lưới. Trong 0.13s đầu
tiên trên hình 3.38, BBĐ DC/AC có vai trò hấp thụ công suất từ lưới để nạp cho Cdc
và đưa Vdc về giá trị đặt. Vì vậy, khi Vdc chưa đạt giá trị đặt thì cuộn cảm trong
BBĐ DC/DC có vai trò tích trữ toàn bộ năng lượng từ PVg. Sau khi Vdc đã đi vào
ổn định, cuộn cảm giải phóng năng lượng khiến đường Pinv(t) cao hơn ppv(t) trong
khoảng thời gian 0.1s, đồng thời Cdc cũng giải phóng năng lượng tích lũy khiến
đường Qinv(t) phải sau 1s mới đi vào ổn định.
Kết quả mô phỏng dòng điện iinv và điện áp uinv pha A ở đầu ra BBĐ DC/AC
(phía hạ áp của MBA) ở thời điểm 1s và 2s (thời điểm có sự biến thiên về G) được
biểu diễn trên hình 3. 39 và hình 3. 40. Các kết quả mô phỏng cho thấy dòng điện
và điện áp phát ra có dạng sin chuẩn, dòng điện luôn chậm pha hơn điện áp và có
biên độ tăng khi G tăng (thời điểm 1s) hoặc biên độ giảm khi G giảm (thời điểm
2s).
0 0.5 1 1.5 2 2.5 30
5
10
15
20
25
30
35
40
45
Thoi gian (s)
Con
g su
at
Pinv (kW)Qinv (kVAr)p (kW)pv
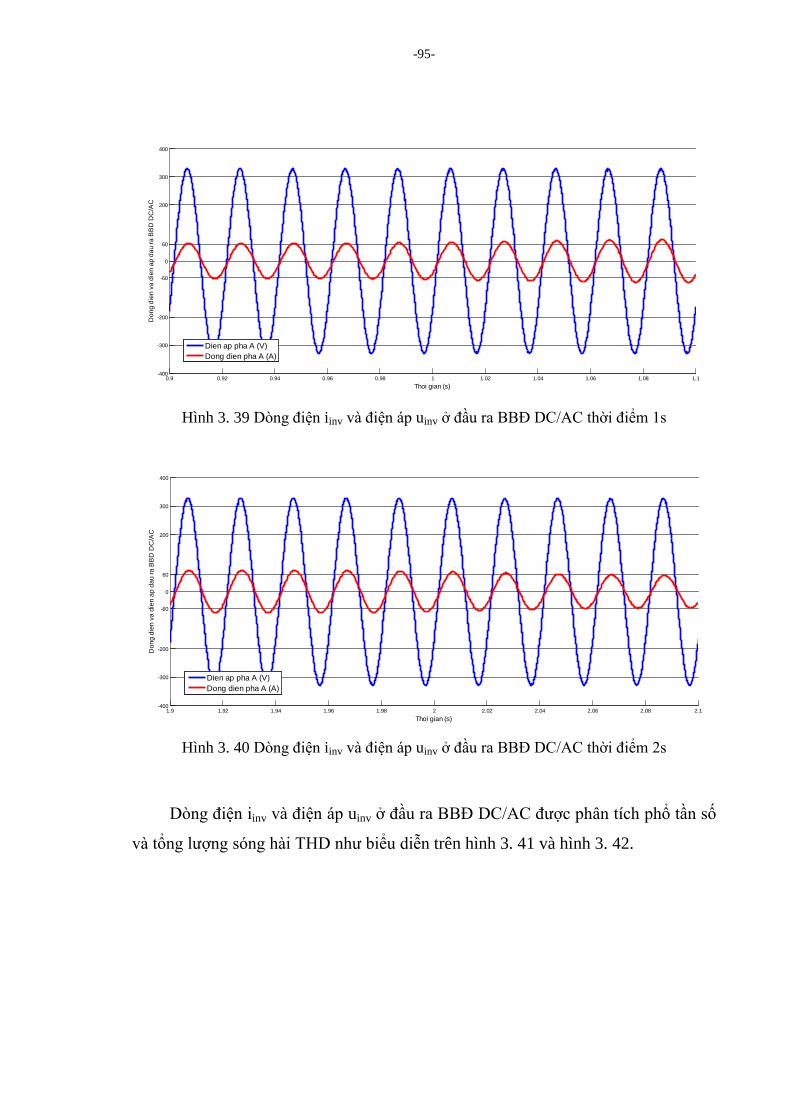
-95-
Hình 3. 39 Dòng điện iinv và điện áp uinv ở đầu ra BBĐ DC/AC thời điểm 1s
Hình 3. 40 Dòng điện iinv và điện áp uinv ở đầu ra BBĐ DC/AC thời điểm 2s
Dòng điện iinv và điện áp uinv ở đầu ra BBĐ DC/AC được phân tích phổ tần số
và tổng lượng sóng hài THD như biểu diễn trên hình 3. 41 và hình 3. 42.
0.9 0.92 0.94 0.96 0.98 1 1.02 1.04 1.06 1.08 1.1-400
-300
-200
-60
0
60
200
300
400
Thoi gian (s)
Don
g di
en v
a di
en a
p da
u ra
BB
D D
C/A
C
Dien ap pha A (V)Dong dien pha A (A)
1.9 1.92 1.94 1.96 1.98 2 2.02 2.04 2.06 2.08 2.1-400
-300
-200
-60
0
60
200
300
400
Thoi gian (s)
Don
g di
en v
a di
en a
p da
u ra
BB
D D
C/A
C
Dien ap pha A (V)Dong dien pha A (A)

-96-
Hình 3. 41 Phổ tần số và hàm lượng sóng hài của iinv
Hình 3. 42 Phổ tần số và hàm lượng sóng hài của uinv
0.3 0.35 0.4 0.45 0.5 0.55 0.6-80
-40
0
40
80Selected signal: 150 cycles. FFT window (in red): 10 cycles
Time (s)
Don
g di
en (A
)
0 1 2 3 4 5 60
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Harmonic order
Fundamental (50Hz) = 63.38 , THD= 0.31%
Mag
(% o
f Fun
dam
enta
l)
0.3 0.35 0.4 0.45 0.5 0.55 0.6-400
-200
0
200
400Selected signal: 150 cycles. FFT window (in red): 10 cycles
Thoi gian (s)
Die
n ap
(V)
0 1 2 3 4 5 60
0.002
0.004
0.006
0.008
0.01
0.012
Harmonic order
Fundamental (50Hz) = 328.2 , THD= 0.37%
Mag
(% o
f Fun
dam
enta
l)
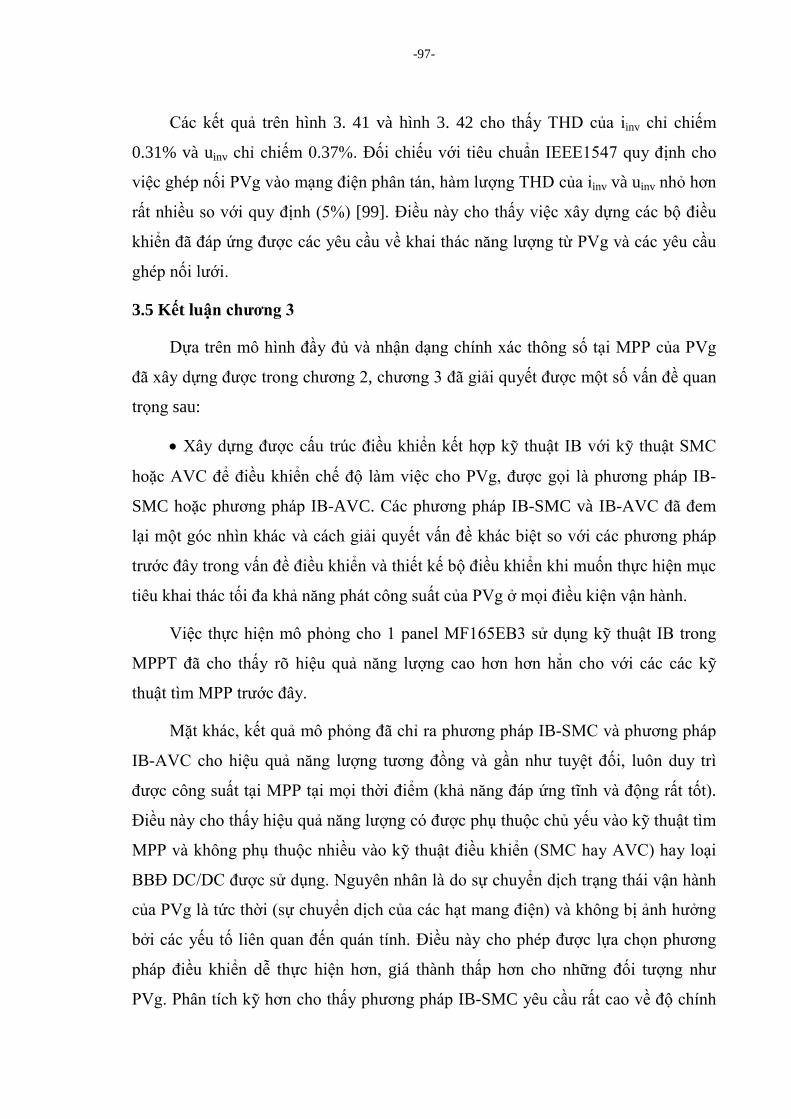
-97-
Các kết quả trên hình 3. 41 và hình 3. 42 cho thấy THD của iinv chỉ chiếm
0.31% và uinv chỉ chiếm 0.37%. Đối chiếu với tiêu chuẩn IEEE1547 quy định cho
việc ghép nối PVg vào mạng điện phân tán, hàm lượng THD của iinv và uinv nhỏ hơn
rất nhiều so với quy định (5%) [99]. Điều này cho thấy việc xây dựng các bộ điều
khiển đã đáp ứng được các yêu cầu về khai thác năng lượng từ PVg và các yêu cầu
ghép nối lưới.
3.5 Kết luận chương 3
Dựa trên mô hình đầy đủ và nhận dạng chính xác thông số tại MPP của PVg
đã xây dựng được trong chương 2, chương 3 đã giải quyết được một số vấn đề quan
trọng sau:
• Xây dựng được cấu trúc điều khiển kết hợp kỹ thuật IB với kỹ thuật SMC
hoặc AVC để điều khiển chế độ làm việc cho PVg, được gọi là phương pháp IB-
SMC hoặc phương pháp IB-AVC. Các phương pháp IB-SMC và IB-AVC đã đem
lại một góc nhìn khác và cách giải quyết vấn đề khác biệt so với các phương pháp
trước đây trong vấn đề điều khiển và thiết kế bộ điều khiển khi muốn thực hiện mục
tiêu khai thác tối đa khả năng phát công suất của PVg ở mọi điều kiện vận hành.
Việc thực hiện mô phỏng cho 1 panel MF165EB3 sử dụng kỹ thuật IB trong
MPPT đã cho thấy rõ hiệu quả năng lượng cao hơn hơn hẳn cho với các các kỹ
thuật tìm MPP trước đây.
Mặt khác, kết quả mô phỏng đã chỉ ra phương pháp IB-SMC và phương pháp
IB-AVC cho hiệu quả năng lượng tương đồng và gần như tuyệt đối, luôn duy trì
được công suất tại MPP tại mọi thời điểm (khả năng đáp ứng tĩnh và động rất tốt).
Điều này cho thấy hiệu quả năng lượng có được phụ thuộc chủ yếu vào kỹ thuật tìm
MPP và không phụ thuộc nhiều vào kỹ thuật điều khiển (SMC hay AVC) hay loại
BBĐ DC/DC được sử dụng. Nguyên nhân là do sự chuyển dịch trạng thái vận hành
của PVg là tức thời (sự chuyển dịch của các hạt mang điện) và không bị ảnh hưởng
bởi các yếu tố liên quan đến quán tính. Điều này cho phép được lựa chọn phương
pháp điều khiển dễ thực hiện hơn, giá thành thấp hơn cho những đối tượng như
PVg. Phân tích kỹ hơn cho thấy phương pháp IB-SMC yêu cầu rất cao về độ chính

-98-
xác của các thiết bị đo lường, giá thành cao khiến cho khả năng đưa vào những ứng
dụng thực tế bị hạn chế hơn so với phương pháp IB-AVC.
• Với việc kết hợp với phương pháp điều khiển IB-AVC cho BBĐ DC/DC
boost, bộ điều khiển ghép nối lưới áp dụng cho BBĐ DC/AC được xây dựng với vai
trò giữ ổn định điện áp trên DCbus, liên kết giữa DCbus với lưới điện và phát công
suất từ PVg phát vào lưới. Nghiên cứu này được áp dụng để xây dựng cấu trúc điều
khiển hoàn chỉnh cho hệ thống khai thác năng lượng từ PVg kết nối lưới 3 pha.
Thực hiện mô phỏng cho một cấu trúc PVg ghép, các kết quả mô phỏng đã
cho thấy hiệu quả năng lượng và khả năng ứng dụng vào thực tế theo mô hình chính
xác khi kết hợp phương pháp IB-AVC để điều khiển phía PVg và cấu trúc điều
khiển phía lưới trong các bài toán kết nối lưới.
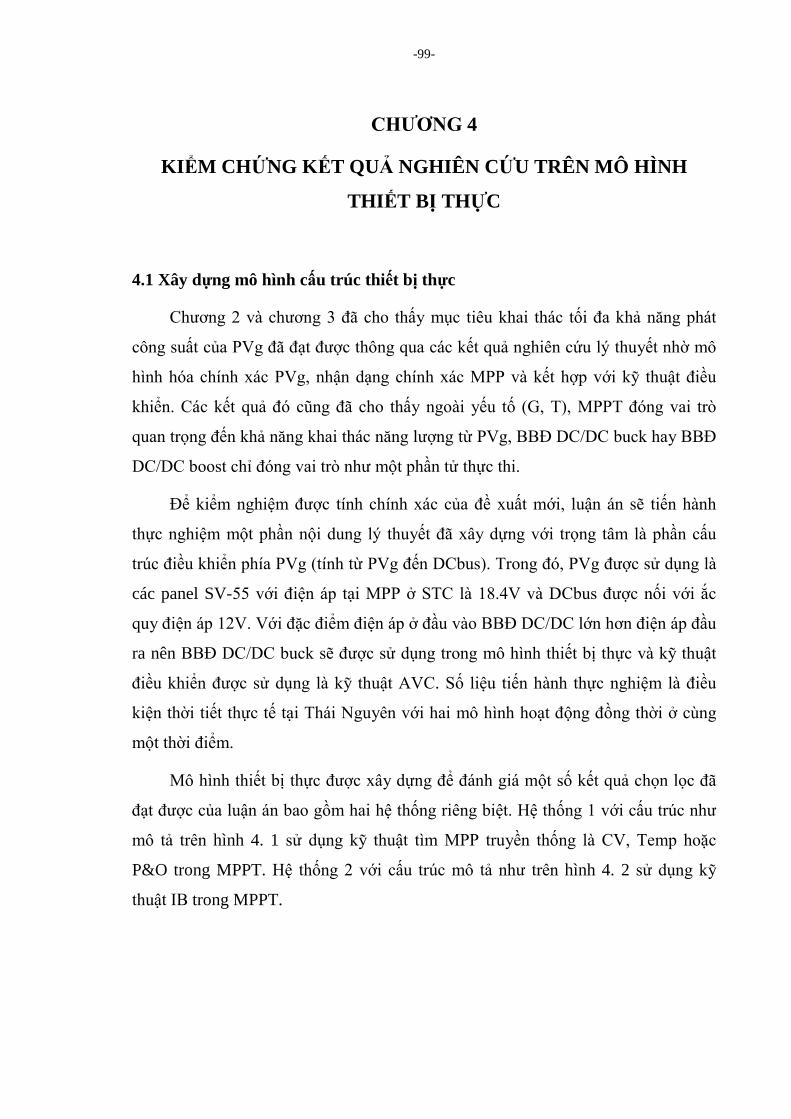
-99-
CHƯƠNG 4
KIỂM CHỨNG KẾT QUẢ NGHIÊN CỨU TRÊN MÔ HÌNH
THIẾT BỊ THỰC
4.1 Xây dựng mô hình cấu trúc thiết bị thực
Chương 2 và chương 3 đã cho thấy mục tiêu khai thác tối đa khả năng phát
công suất của PVg đã đạt được thông qua các kết quả nghiên cứu lý thuyết nhờ mô
hình hóa chính xác PVg, nhận dạng chính xác MPP và kết hợp với kỹ thuật điều
khiển. Các kết quả đó cũng đã cho thấy ngoài yếu tố (G, T), MPPT đóng vai trò
quan trọng đến khả năng khai thác năng lượng từ PVg, BBĐ DC/DC buck hay BBĐ
DC/DC boost chỉ đóng vai trò như một phần tử thực thi.
Để kiểm nghiệm được tính chính xác của đề xuất mới, luận án sẽ tiến hành
thực nghiệm một phần nội dung lý thuyết đã xây dựng với trọng tâm là phần cấu
trúc điều khiển phía PVg (tính từ PVg đến DCbus). Trong đó, PVg được sử dụng là
các panel SV-55 với điện áp tại MPP ở STC là 18.4V và DCbus được nối với ắc
quy điện áp 12V. Với đặc điểm điện áp ở đầu vào BBĐ DC/DC lớn hơn điện áp đầu
ra nên BBĐ DC/DC buck sẽ được sử dụng trong mô hình thiết bị thực và kỹ thuật
điều khiển được sử dụng là kỹ thuật AVC. Số liệu tiến hành thực nghiệm là điều
kiện thời tiết thực tế tại Thái Nguyên với hai mô hình hoạt động đồng thời ở cùng
một thời điểm.
Mô hình thiết bị thực được xây dựng để đánh giá một số kết quả chọn lọc đã
đạt được của luận án bao gồm hai hệ thống riêng biệt. Hệ thống 1 với cấu trúc như
mô tả trên hình 4. 1 sử dụng kỹ thuật tìm MPP truyền thống là CV, Temp hoặc
P&O trong MPPT. Hệ thống 2 với cấu trúc mô tả như trên hình 4. 2 sử dụng kỹ
thuật IB trong MPPT.
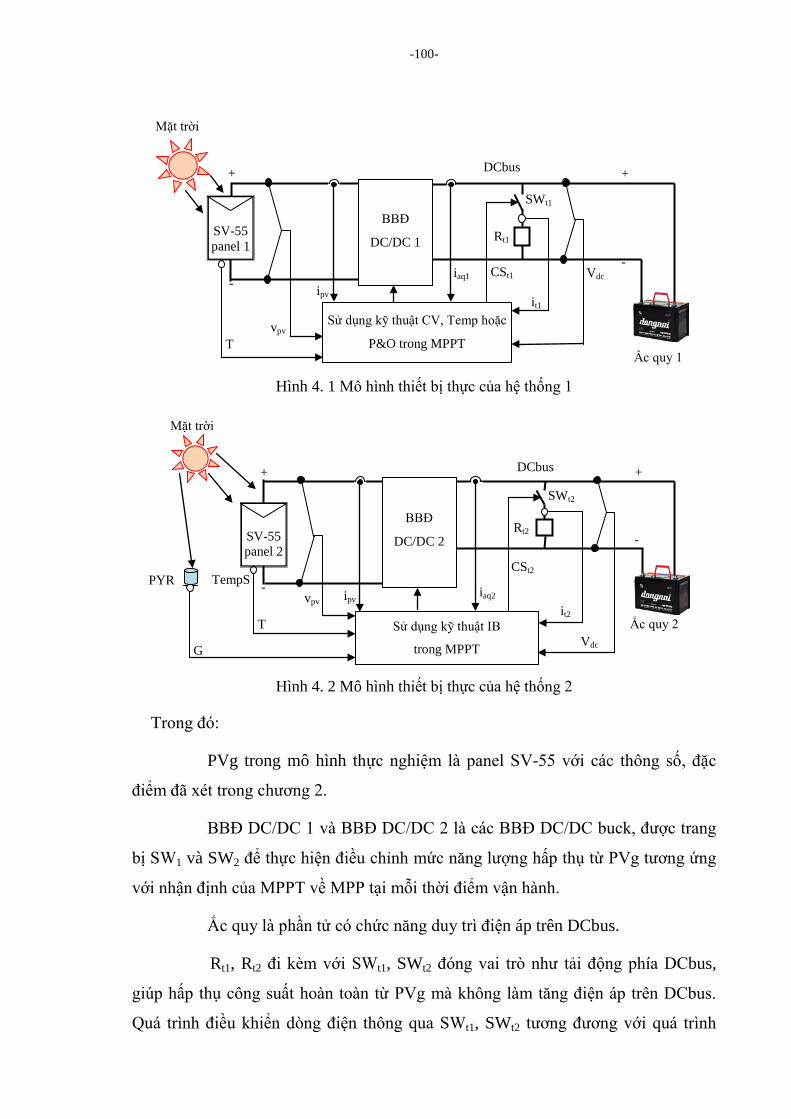
-100-
Hình 4. 1 Mô hình thiết bị thực của hệ thống 1
Hình 4. 2 Mô hình thiết bị thực của hệ thống 2
Trong đó:
PVg trong mô hình thực nghiệm là panel SV-55 với các thông số, đặc
điểm đã xét trong chương 2.
BBĐ DC/DC 1 và BBĐ DC/DC 2 là các BBĐ DC/DC buck, được trang
bị SW1 và SW2 để thực hiện điều chỉnh mức năng lượng hấp thụ từ PVg tương ứng
với nhận định của MPPT về MPP tại mỗi thời điểm vận hành.
Ắc quy là phần tử có chức năng duy trì điện áp trên DCbus.
Rt1, Rt2 đi kèm với SWt1, SWt2 đóng vai trò như tải động phía DCbus,
giúp hấp thụ công suất hoàn toàn từ PVg mà không làm tăng điện áp trên DCbus.
Quá trình điều khiển dòng điện thông qua SWt1, SWt2 tương đương với quá trình
+
-
Vdc
it1
iaq1
Ắc quy 1
SWt1
Rt1
CSt1
+ DCbus
-
Sử dụng kỹ thuật CV, Temp hoặc
P&O trong MPPT T
vpv
ipv
Mặt trời
BBĐ
DC/DC 1
SV-55 panel 1
ipv
Mặt trời
PYR TempS
G
+
-
Vdc
it2
iaq2
Ắc quy 2
SWt2
Rt2
CSt2
+ DCbus
-
Sử dụng kỹ thuật IB
trong MPPT
T
vpv
BBĐ
DC/DC 2
SV-55 panel 2
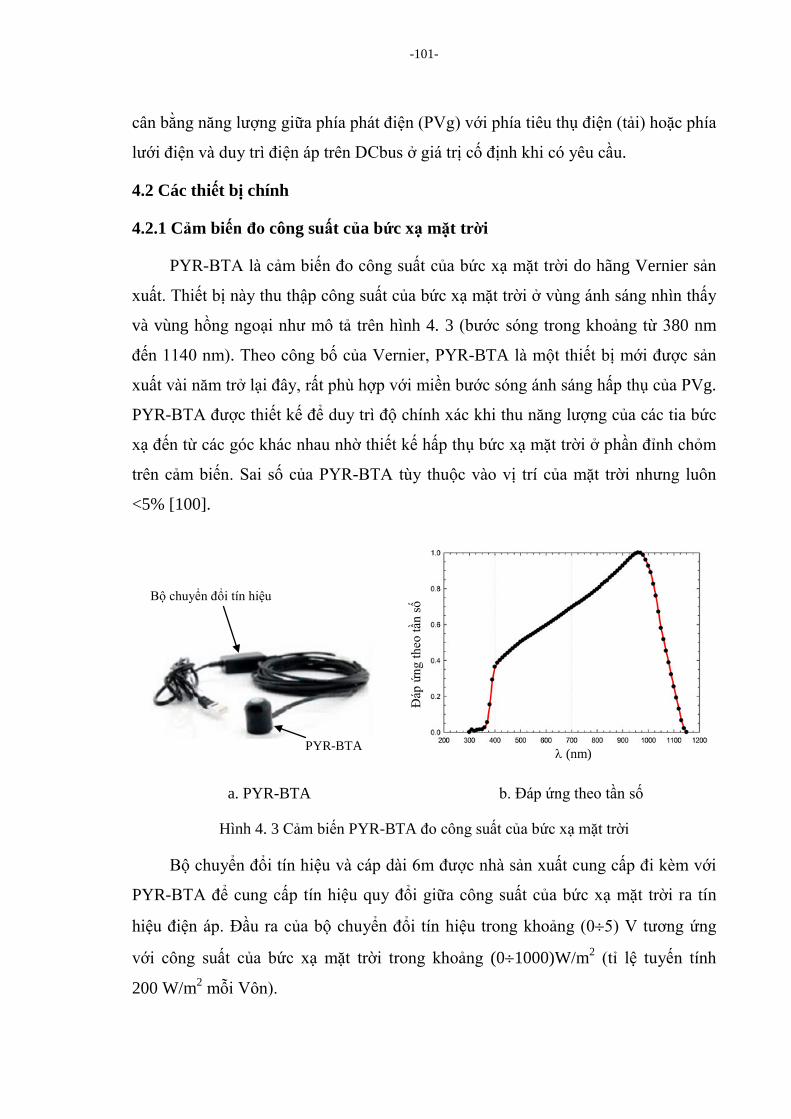
-101-
cân bằng năng lượng giữa phía phát điện (PVg) với phía tiêu thụ điện (tải) hoặc phía
lưới điện và duy trì điện áp trên DCbus ở giá trị cố định khi có yêu cầu.
4.2 Các thiết bị chính
4.2.1 Cảm biến đo công suất của bức xạ mặt trời
PYR-BTA là cảm biến đo công suất của bức xạ mặt trời do hãng Vernier sản
xuất. Thiết bị này thu thập công suất của bức xạ mặt trời ở vùng ánh sáng nhìn thấy
và vùng hồng ngoại như mô tả trên hình 4. 3 (bước sóng trong khoảng từ 380 nm
đến 1140 nm). Theo công bố của Vernier, PYR-BTA là một thiết bị mới được sản
xuất vài năm trở lại đây, rất phù hợp với miền bước sóng ánh sáng hấp thụ của PVg.
PYR-BTA được thiết kế để duy trì độ chính xác khi thu năng lượng của các tia bức
xạ đến từ các góc khác nhau nhờ thiết kế hấp thụ bức xạ mặt trời ở phần đỉnh chỏm
trên cảm biến. Sai số của PYR-BTA tùy thuộc vào vị trí của mặt trời nhưng luôn
<5% [100].
a. PYR-BTA b. Đáp ứng theo tần số
Hình 4. 3 Cảm biến PYR-BTA đo công suất của bức xạ mặt trời
Bộ chuyển đổi tín hiệu và cáp dài 6m được nhà sản xuất cung cấp đi kèm với
PYR-BTA để cung cấp tín hiệu quy đổi giữa công suất của bức xạ mặt trời ra tín
hiệu điện áp. Đầu ra của bộ chuyển đổi tín hiệu trong khoảng (0÷5) V tương ứng
với công suất của bức xạ mặt trời trong khoảng (0÷1000)W/m2 (tỉ lệ tuyến tính
200 W/m2 mỗi Vôn).
Đáp
ứng
theo
tần
số
λ (nm)
PYR-BTA
Bộ chuyển đổi tín hiệu
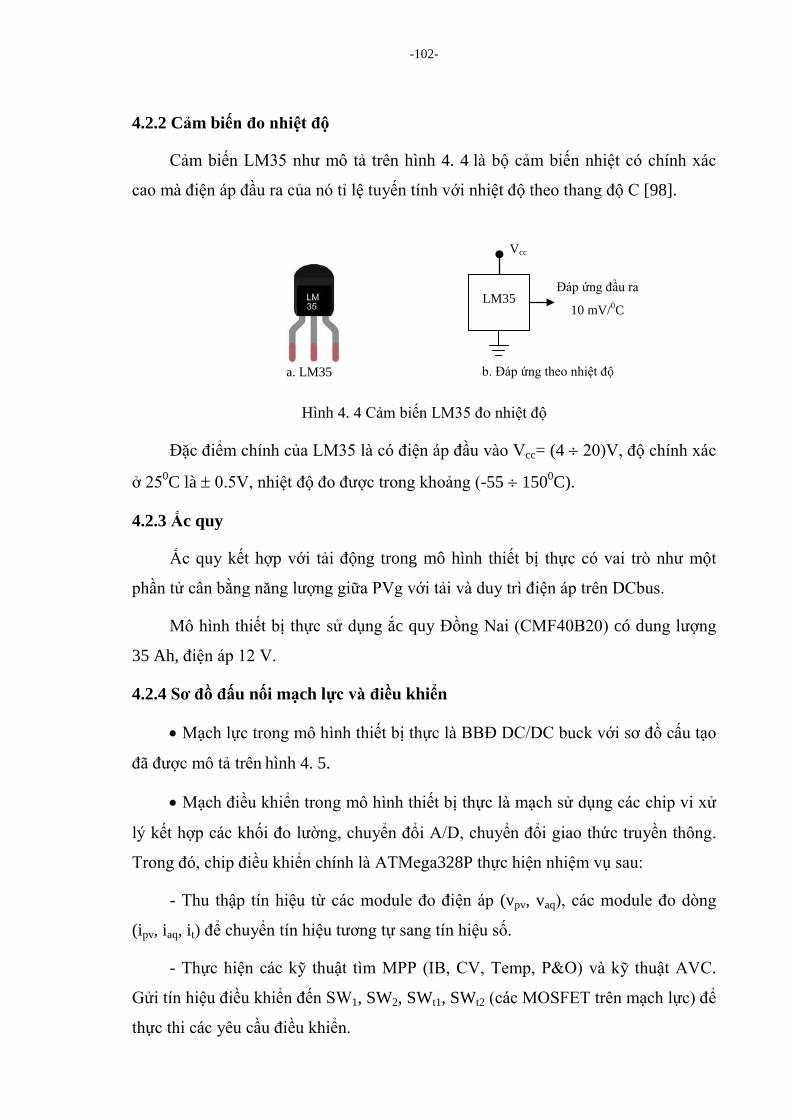
-102-
4.2.2 Cảm biến đo nhiệt độ
Cảm biến LM35 như mô tả trên hình 4. 4 là bộ cảm biến nhiệt có chính xác
cao mà điện áp đầu ra của nó tỉ lệ tuyến tính với nhiệt độ theo thang độ C [98].
Hình 4. 4 Cảm biến LM35 đo nhiệt độ
Đặc điểm chính của LM35 là có điện áp đầu vào Vcc= (4 ÷ 20)V, độ chính xác
ở 250C là ± 0.5V, nhiệt độ đo được trong khoảng (-55 ÷ 1500C).
4.2.3 Ắc quy
Ắc quy kết hợp với tải động trong mô hình thiết bị thực có vai trò như một
phần tử cân bằng năng lượng giữa PVg với tải và duy trì điện áp trên DCbus.
Mô hình thiết bị thực sử dụng ắc quy Đồng Nai (CMF40B20) có dung lượng
35 Ah, điện áp 12 V.
4.2.4 Sơ đồ đấu nối mạch lực và điều khiển
• Mạch lực trong mô hình thiết bị thực là BBĐ DC/DC buck với sơ đồ cấu tạo
đã được mô tả trên hình 4. 5.
• Mạch điều khiển trong mô hình thiết bị thực là mạch sử dụng các chip vi xử
lý kết hợp các khối đo lường, chuyển đổi A/D, chuyển đổi giao thức truyền thông.
Trong đó, chip điều khiển chính là ATMega328P thực hiện nhiệm vụ sau:
- Thu thập tín hiệu từ các module đo điện áp (vpv, vaq), các module đo dòng
(ipv, iaq, it) để chuyển tín hiệu tương tự sang tín hiệu số.
- Thực hiện các kỹ thuật tìm MPP (IB, CV, Temp, P&O) và kỹ thuật AVC.
Gửi tín hiệu điều khiển đến SW1, SW2, SWt1, SWt2 (các MOSFET trên mạch lực) để
thực thi các yêu cầu điều khiển.
a. LM35
LM35
Đáp ứng đầu ra
10 mV/0C
Vcc
b. Đáp ứng theo nhiệt độ
-103-
- Giao tiếp với chip MAX232 để chuyển đổi mức logic truyền thông (từ giao
thức truyền thông TTL (Transistor – Transistor – Logic) sang RS232 qua cổng
truyền thông nối tiếp. Chuẩn giao thức truyền thông để liên kết hai chip này với
máy tính là modbus RTU 232, trong đó máy tính là Master (thiết bị chủ) và chip là
Slave (thiết bị tớ).
- Giao tiếp với chip MCP3008 nhờ chuẩn truyền thông SPI để thu thập thông
tin về G từ PYR-BTA, thông tin về T từ TempS gắn ở mặt sau panel SV-55. Trong
đó, chip MCP3008 có vai trò chuyển tín hiệu tương tự của PYR-BTA và các TempS
sang tín hiệu số.
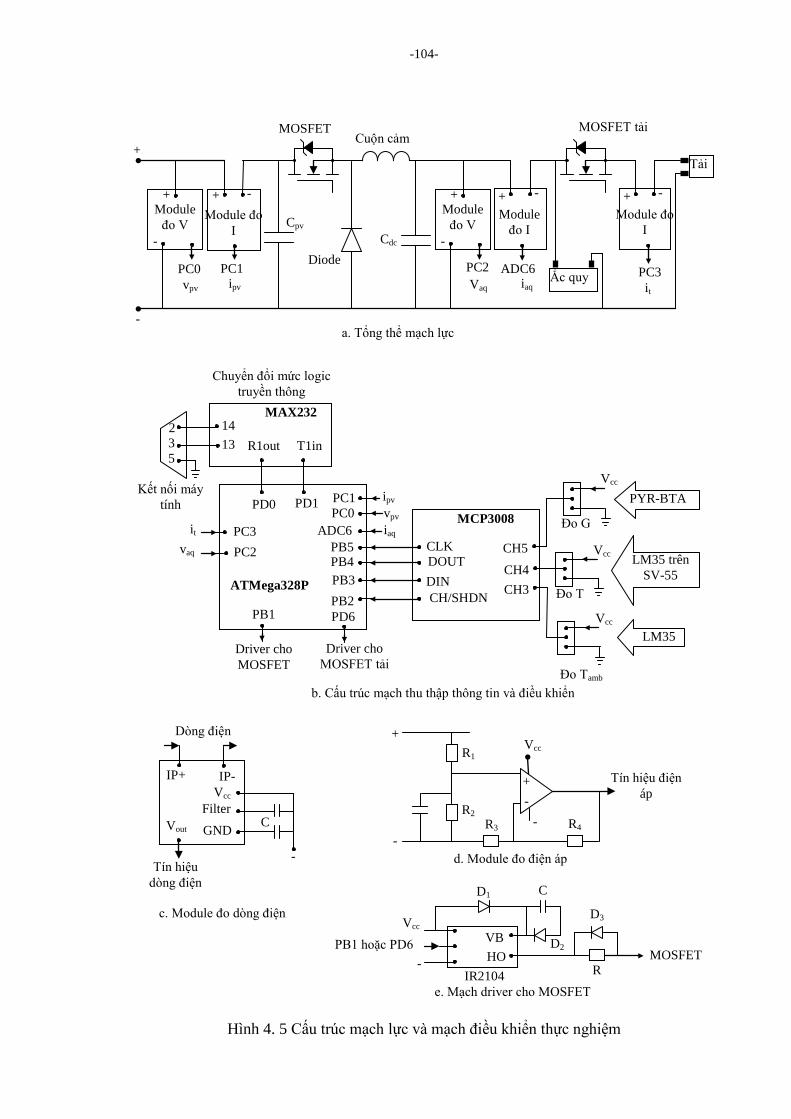
-104-
Hình 4. 5 Cấu trúc mạch lực và mạch điều khiển thực nghiệm
IP+ IP- Vcc
Vout
Filter
GND
- Tín hiệu dòng điện
C
Dòng điện
c. Module đo dòng điện
d. Module đo điện áp
-
+ -
Vcc
-
+
R2 R3 R4
Tín hiệu điện áp
R1
Vcc
PB1 hoặc PD6 VB
MOSFET
D1 C
D2
D3
R e. Mạch driver cho MOSFET
HO - IR2104
a. Tổng thể mạch lực
Cpv
Diode Ắc quy
Cdc
+ -
Module đo I
PC1
+ Module
đo V
PC0 PC2
vpv ipv iaq
ADC6
it
PC3
+
-
Cuộn cảm
Tải
MOSFET MOSFET tải
Vaq
-
+ Module
đo V
-
+ -
Module đo I
+ -
Module đo I
2 3 5
MAX232 14
13
ATMega328P
T1in
PD0
R1out
PD1 PC1 PC0
PC3
PC2
ADC6
ipv
vpv
vaq
it
Kết nối máy tính
PB1 PD6
iaq
Driver cho MOSFET
Driver cho MOSFET tải
PYR-BTA
Vcc
Đo G
Vcc
Đo T
Vcc
Đo Tamb
CH5
CH4
CH3
MCP3008
LM35 trên SV-55
LM35
PB5 CLK PB4 DOUT
DIN PB3
CH/SHDN PB2
b. Cấu trúc mạch thu thập thông tin và điều khiển
Chuyển đổi mức logic truyền thông
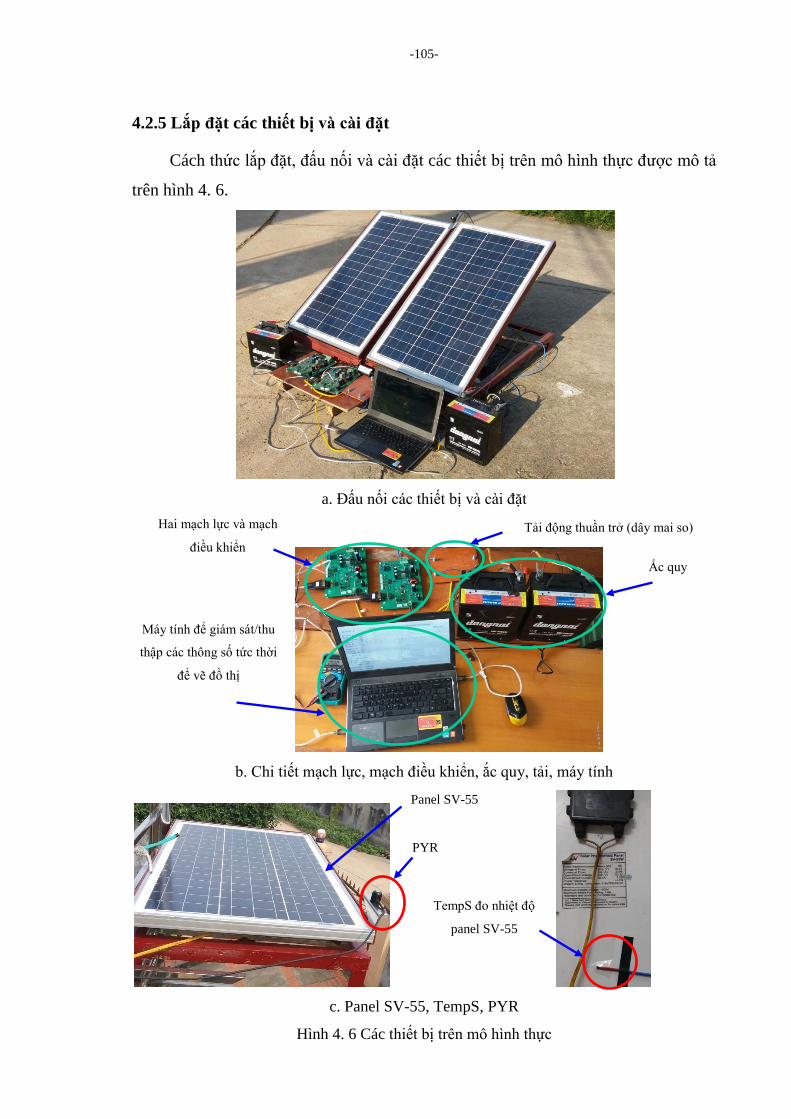
-105-
4.2.5 Lắp đặt các thiết bị và cài đặt
Cách thức lắp đặt, đấu nối và cài đặt các thiết bị trên mô hình thực được mô tả
trên hình 4. 6.
a. Đấu nối các thiết bị và cài đặt
b. Chi tiết mạch lực, mạch điều khiển, ắc quy, tải, máy tính
c. Panel SV-55, TempS, PYR
Hình 4. 6 Các thiết bị trên mô hình thực
PYR
Panel SV-55
TempS đo nhiệt độ
panel SV-55
Hai mạch lực và mạch
điều khiển Tải động thuần trở (dây mai so)
Ắc quy
Máy tính để giám sát/thu
thập các thông số tức thời
để vẽ đồ thị
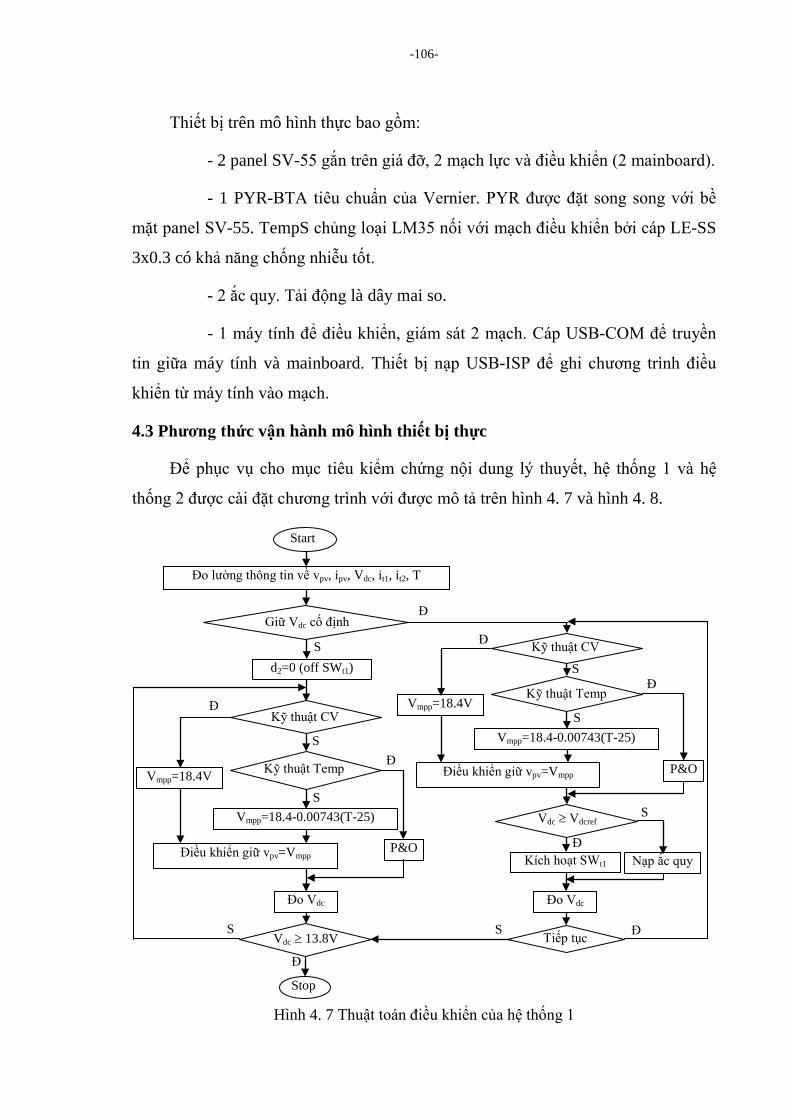
-106-
Thiết bị trên mô hình thực bao gồm:
- 2 panel SV-55 gắn trên giá đỡ, 2 mạch lực và điều khiển (2 mainboard).
- 1 PYR-BTA tiêu chuẩn của Vernier. PYR được đặt song song với bề
mặt panel SV-55. TempS chủng loại LM35 nối với mạch điều khiển bởi cáp LE-SS
3x0.3 có khả năng chống nhiễu tốt.
- 2 ắc quy. Tải động là dây mai so.
- 1 máy tính để điều khiển, giám sát 2 mạch. Cáp USB-COM để truyền
tin giữa máy tính và mainboard. Thiết bị nạp USB-ISP để ghi chương trình điều
khiển từ máy tính vào mạch.
4.3 Phương thức vận hành mô hình thiết bị thực
Để phục vụ cho mục tiêu kiểm chứng nội dung lý thuyết, hệ thống 1 và hệ
thống 2 được cài đặt chương trình với được mô tả trên hình 4. 7 và hình 4. 8.
Hình 4. 7 Thuật toán điều khiển của hệ thống 1
Kỹ thuật Temp
Start
Đo lường thông tin về vpv, ipv, Vdc, it1, it2, T
Giữ Vdc cố định
S
Đ
d2=0 (off SWt1)
S
Kỹ thuật CV Đ
Vmpp=18.4V
Kỹ thuật Temp
Vmpp=18.4-0.00743(T-25)
Đ
P&O
S
Vdc ≥ 13.8V
Đo Vdc
S
Đ
Stop
Vdc ≥ Vdcref
Nạp ắc quy Kích hoạt SWt1
Đo Vdc
Đ
S
Tiếp tục Đ S
S
Kỹ thuật CV Đ
Vmpp=18.4V
Vmpp=18.4-0.00743(T-25)
Đ
P&O
S
Điều khiển giữ vpv=Vmpp
Điều khiển giữ vpv=Vmpp
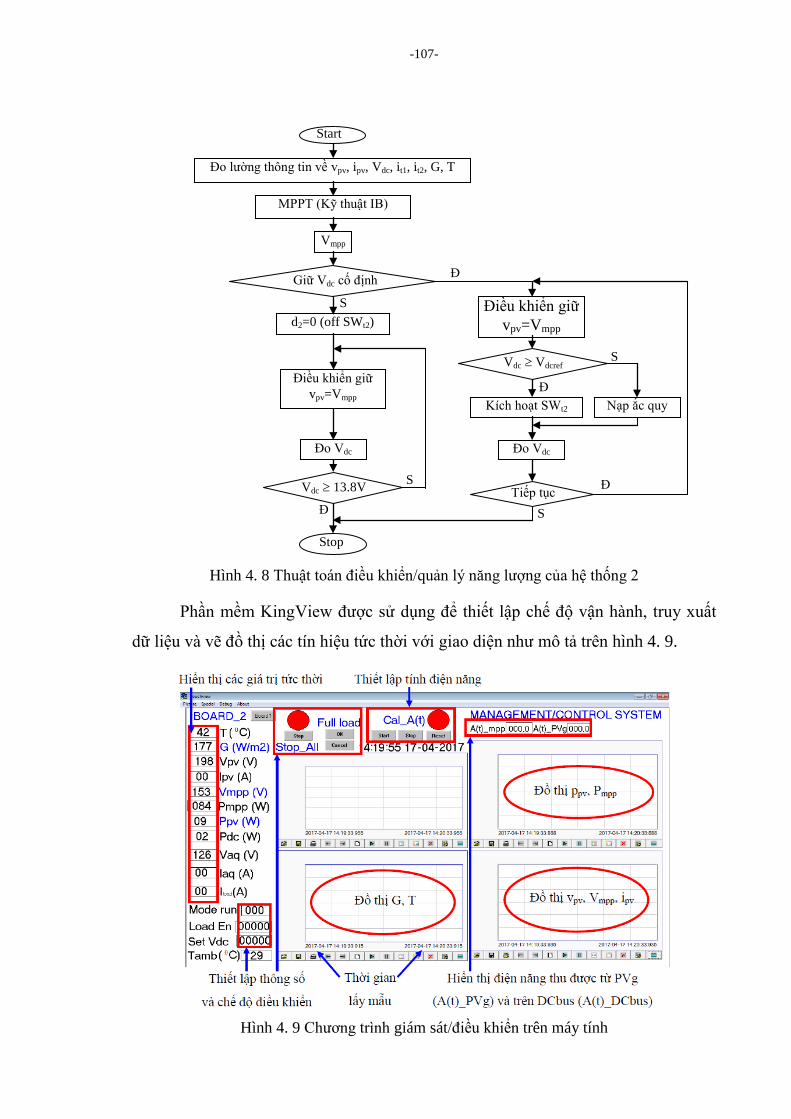
-107-
Hình 4. 8 Thuật toán điều khiển/quản lý năng lượng của hệ thống 2
Phần mềm KingView được sử dụng để thiết lập chế độ vận hành, truy xuất
dữ liệu và vẽ đồ thị các tín hiệu tức thời với giao diện như mô tả trên hình 4. 9.
Hình 4. 9 Chương trình giám sát/điều khiển trên máy tính
Điều khiển giữ vpv=Vmpp
Start
Đo lường thông tin về vpv, ipv, Vdc, it1, it2, G, T
MPPT (Kỹ thuật IB)
Vmpp
Giữ Vdc cố định
Điều khiển giữ vpv=Vmpp
d2=0 (off SWt2)
Vdc ≥ Vdcref
Vdc ≥ 13.8V
Nạp ắc quy Kích hoạt SWt2
Đo Vdc
S
Đ
Đo Vdc
S
Đ
Đ
S
Stop
Tiếp tục Đ
S
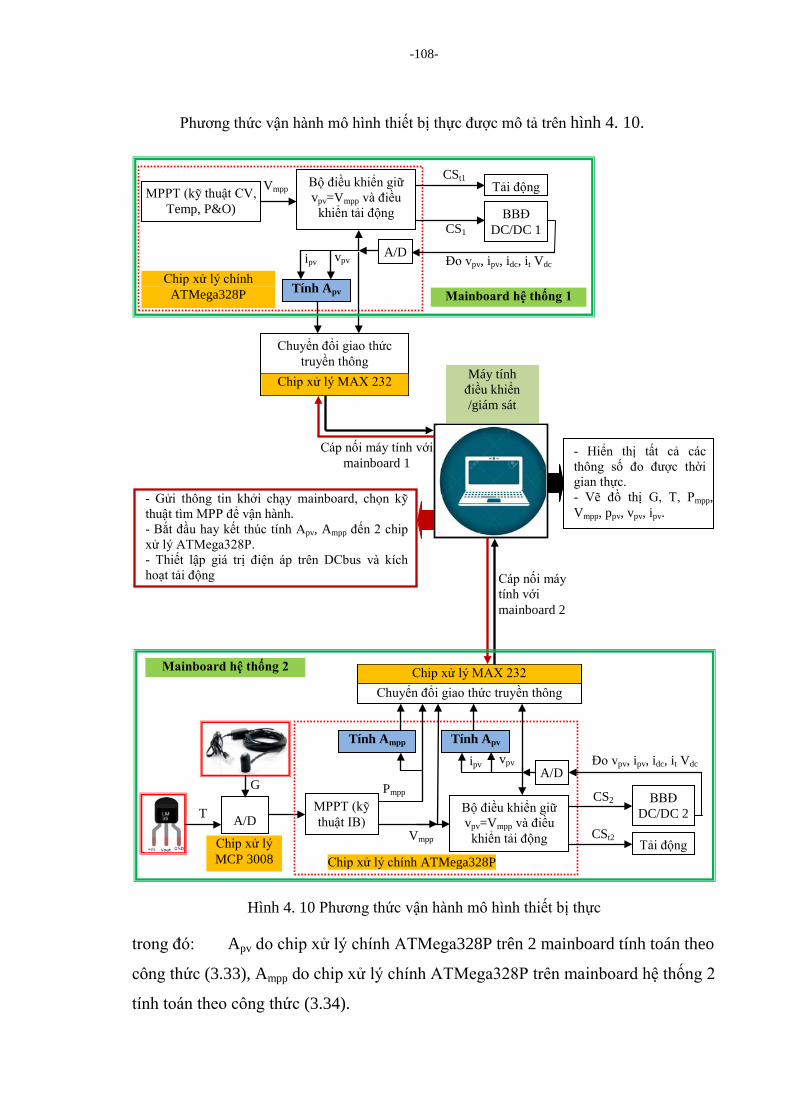
-108-
Phương thức vận hành mô hình thiết bị thực được mô tả trên hình 4. 10.
Hình 4. 10 Phương thức vận hành mô hình thiết bị thực
trong đó: Apv do chip xử lý chính ATMega328P trên 2 mainboard tính toán theo
công thức (3.33), Ampp do chip xử lý chính ATMega328P trên mainboard hệ thống 2
tính toán theo công thức (3.34).
A/D
Chip xử lý MCP 3008
MPPT (kỹ thuật IB)
Vmpp
Pmpp
Bộ điều khiển giữ vpv=Vmpp và điều
khiển tải động
BBĐ DC/DC 2
Chip xử lý chính ATMega328P
A/D
Chuyển đổi giao thức truyền thông Chip xử lý MAX 232
CS2
Tải động CSt2
MPPT (kỹ thuật CV, Temp, P&O)
Vmpp Bộ điều khiển giữ vpv=Vmpp và điều
khiển tải động
BBĐ DC/DC 1
Chip xử lý chính ATMega328P
A/D
CS1
Tải động
CSt1
Chuyển đổi giao thức truyền thông
Đo vpv, ipv, idc, it Vdc
Chip xử lý MAX 232
Tính Ampp Tính Apv
G
T
vpv ipv
Đo vpv, ipv, idc, it Vdc vpv ipv
Tính Apv
- Hiển thị tất cả các thông số đo được thời gian thực. - Vẽ đồ thị G, T, Pmpp, Vmpp, ppv, vpv, ipv.
Máy tính điều khiển /giám sát
Mainboard hệ thống 1
Mainboard hệ thống 2
- Gửi thông tin khởi chạy mainboard, chọn kỹ thuật tìm MPP để vận hành. - Bắt đầu hay kết thúc tính Apv, Ampp đến 2 chip xử lý ATMega328P. - Thiết lập giá trị điện áp trên DCbus và kích hoạt tải động
Cáp nối máy tính với mainboard 1
Cáp nối máy tính với mainboard 2
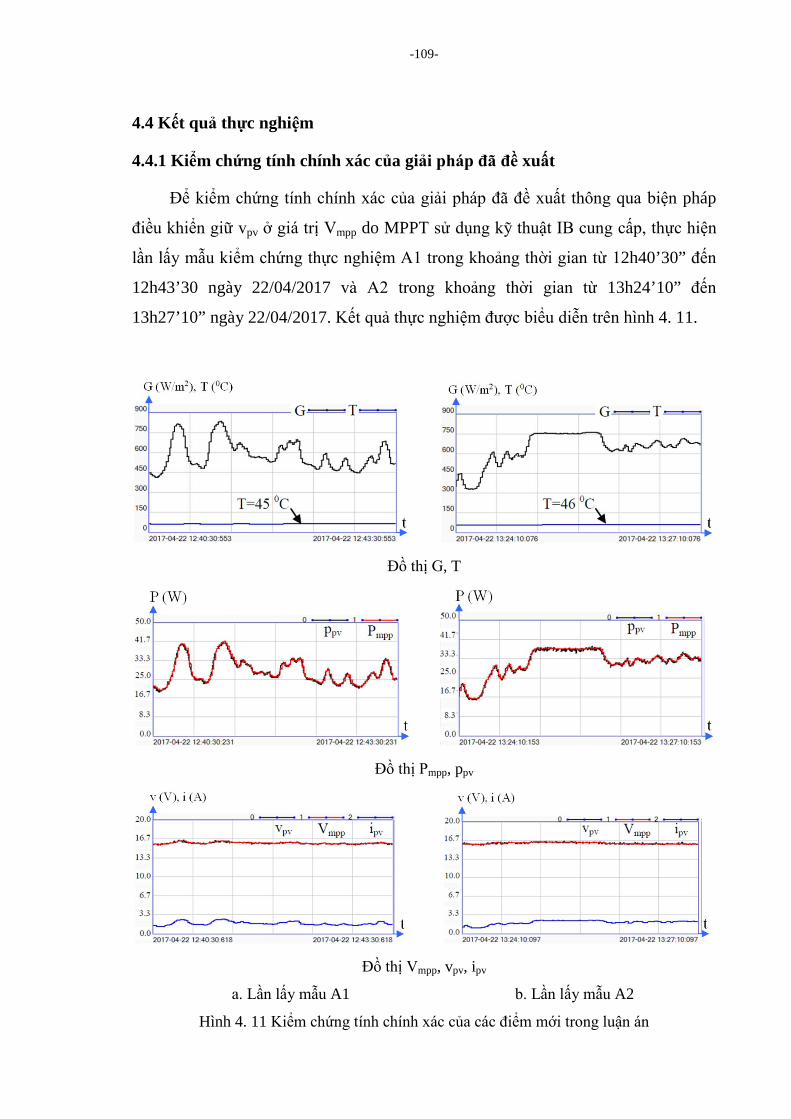
-109-
4.4 Kết quả thực nghiệm
4.4.1 Kiểm chứng tính chính xác của giải pháp đã đề xuất
Để kiểm chứng tính chính xác của giải pháp đã đề xuất thông qua biện pháp
điều khiển giữ vpv ở giá trị Vmpp do MPPT sử dụng kỹ thuật IB cung cấp, thực hiện
lần lấy mẫu kiểm chứng thực nghiệm A1 trong khoảng thời gian từ 12h40’30” đến
12h43’30 ngày 22/04/2017 và A2 trong khoảng thời gian từ 13h24’10” đến
13h27’10” ngày 22/04/2017. Kết quả thực nghiệm được biểu diễn trên hình 4. 11.
Đồ thị G, T
Đồ thị Pmpp, ppv
Đồ thị Vmpp, vpv, ipv
a. Lần lấy mẫu A1 b. Lần lấy mẫu A2
Hình 4. 11 Kiểm chứng tính chính xác của các điểm mới trong luận án
-110-
Trong đó:
Trên đồ thị G, T: đường G (màu đen, W/m2) biểu diễn giá trị tức thời của G
nhờ sử dụng PYR, đường T (màu xanh, 0C) có được nhờ sử dụng TempS.
Trên đồ thị Pmpp, ppv: Đường đỏ (Pmpp, W) biểu diễn công suất tức thời tại
MPP do chip xử lý ATMega328P tính toán được khi sử dụng thông tin về (G, T) và
kỹ thuật IB. Đường đen (ppv) biểu diễn công suất tức thời phát ra từ PVg do chip xử
lý ATMega328P tính toán được khi sử dụng thông tin của cảm biến đo dòng điện
phát ra từ PVg (ipv) và điện áp ở hai đầu PVg (vpv).
Trên đồ thị Vmpp, vpv, ipv (đều biểu thị các giá trị trung bình): đường đỏ (Vmpp)
biểu diễn điện áp tại MPP do chip xử lý ATMega328P tính toán được khi sử dụng
thông tin về (G, T) và kỹ thuật IB. Đường đen (vpv), đường xanh (ipv) biểu diễn điện
áp và dòng điện phát ra từ PVg.
Hai lần lấy mẫu A1 và A2 cho thấy G có thể có những thời điểm G chỉ tăng,
giảm đơn thuần hoặc biến thiên khá mạnh. Kết quả trên Hình 4. 11 đã cho thấy
đường ppv, vpv vận hành thực tế gần như trùng khớp với Pmpp(t), Vmpp(t) do MPPT
tính toán được (chỉ có đôi chút dao động với độ lệch rất nhỏ do ảnh hưởng của trễ,
sai số đo lường và tính toán). Sự trùng khớp giữa các đại lượng tính toán với các đại
lượng vận hành phát ra từ PVg đã chứng minh bằng thực nghiệm sự đúng đắn của
thuật toán Newton-Raphson tìm thông số ẩn của PVg, thuật toán IB tìm MPP, hàm
số n(T) các hệ phương trình quy đổi thông số từ STC về điều kiện vận hành bất kỳ
và kỹ thuật AVC và có khả năng giúp khai thác tối đa công suất thực sự của PVg.
4.4.2 Đánh giá hiệu quả năng lượng của giải pháp đã đề xuất
Để đánh giá hiệu quả năng lượng của giải pháp đã đề xuất, hiệu suất H% sẽ
được xác định thông qua các lần lấy mẫu tương ứng với từng cặp giữa kỹ thuật IB
với kỹ thuật P&O (∆d=0.2%), kỹ thuật CV với kỹ thuật Temp. Thời gian của mỗi
lần lấy mẫu là 3 phút. Điện áp trên DCbus luôn được giữ ở giá trị 12V.
• So sánh kỹ thuật IB và kỹ thuật P&O (∆d=0.2%): Thực hiện lần lấy mẫu
kiểm chứng thực nghiệm B1 trong khoảng thời gian từ 10h07’20” đến 10h10’20”

-111-
ngày 14/04/2017 và B2 trong khoảng thời gian từ 11h25’30” đến 11h28’30” ngày
22/04/2017. Kết quả thực nghiệm được biểu diễn trên hình 4. 12.
Đồ thị G, T
Đồ thị Pmpp, ppv tương ứng với kỹ thuật IB
Đồ thị Pmpp , ppv tương ứng với kỹ thuật P&O
a. Lần lấy mẫu B1 b. Lần lấy mẫu B2
Hình 4. 12 Đồ thị G, T, Pmpp, ppv khi so sánh kỹ thuật IB với kỹ thuật P&O
Hiệu quả năng lượng (đánh giá điện năng thu được từ PVg) tương ứng
với hai lần lấy mẫu B1 và B2 được biểu diễn trong bảng 4. 1, trong đó H%
được xác định theo (3.35).
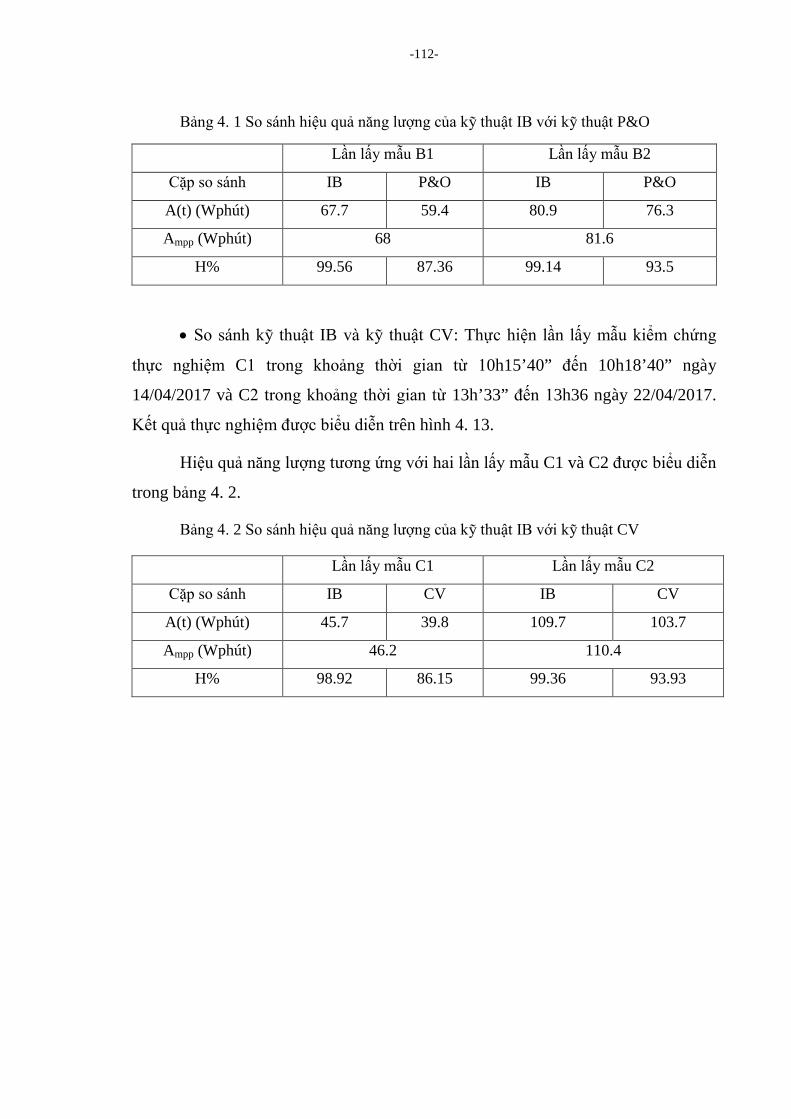
-112-
Bảng 4. 1 So sánh hiệu quả năng lượng của kỹ thuật IB với kỹ thuật P&O
Lần lấy mẫu B1 Lần lấy mẫu B2
Cặp so sánh IB P&O IB P&O
A(t) (Wphút) 67.7 59.4 80.9 76.3
Ampp (Wphút) 68 81.6
H% 99.56 87.36 99.14 93.5
• So sánh kỹ thuật IB và kỹ thuật CV: Thực hiện lần lấy mẫu kiểm chứng
thực nghiệm C1 trong khoảng thời gian từ 10h15’40” đến 10h18’40” ngày
14/04/2017 và C2 trong khoảng thời gian từ 13h’33” đến 13h36 ngày 22/04/2017.
Kết quả thực nghiệm được biểu diễn trên hình 4. 13.
Hiệu quả năng lượng tương ứng với hai lần lấy mẫu C1 và C2 được biểu diễn
trong bảng 4. 2.
Bảng 4. 2 So sánh hiệu quả năng lượng của kỹ thuật IB với kỹ thuật CV
Lần lấy mẫu C1 Lần lấy mẫu C2
Cặp so sánh IB CV IB CV
A(t) (Wphút) 45.7 39.8 109.7 103.7
Ampp (Wphút) 46.2 110.4
H% 98.92 86.15 99.36 93.93
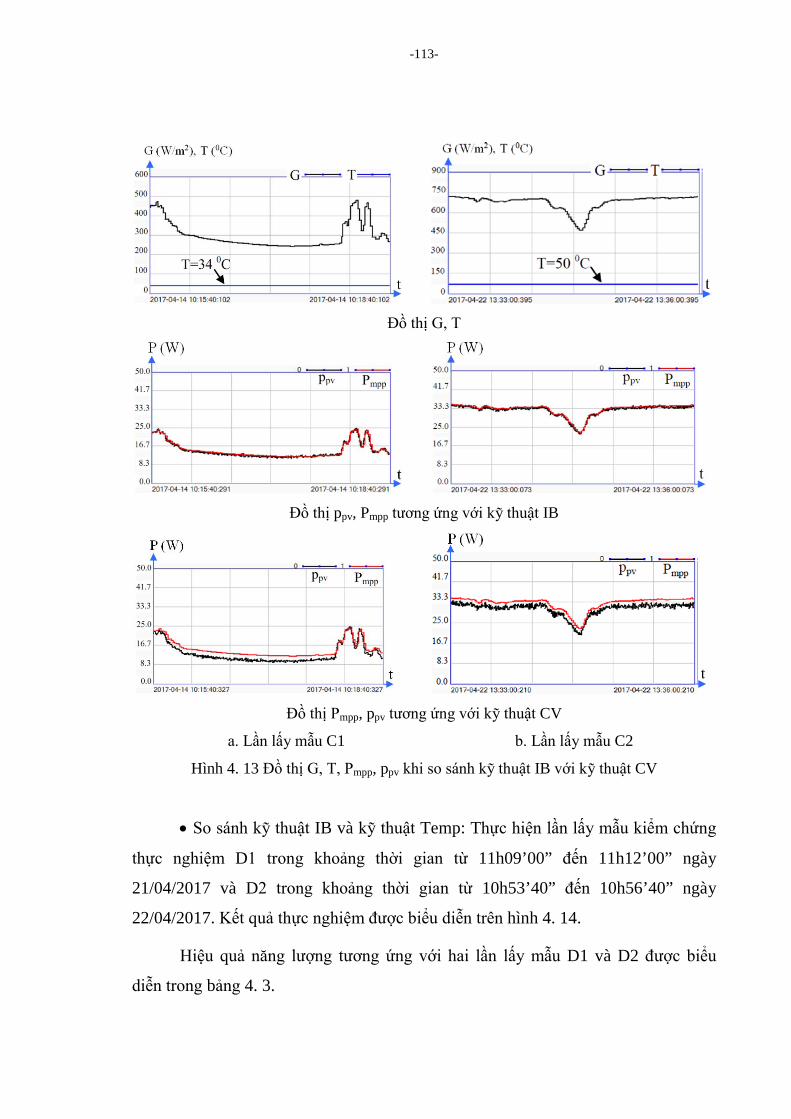
-113-
Đồ thị G, T
Đồ thị ppv, Pmpp tương ứng với kỹ thuật IB
Đồ thị Pmpp, ppv tương ứng với kỹ thuật CV
a. Lần lấy mẫu C1 b. Lần lấy mẫu C2 Hình 4. 13 Đồ thị G, T, Pmpp, ppv khi so sánh kỹ thuật IB với kỹ thuật CV
• So sánh kỹ thuật IB và kỹ thuật Temp: Thực hiện lần lấy mẫu kiểm chứng
thực nghiệm D1 trong khoảng thời gian từ 11h09’00” đến 11h12’00” ngày
21/04/2017 và D2 trong khoảng thời gian từ 10h53’40” đến 10h56’40” ngày
22/04/2017. Kết quả thực nghiệm được biểu diễn trên hình 4. 14.
Hiệu quả năng lượng tương ứng với hai lần lấy mẫu D1 và D2 được biểu
diễn trong bảng 4. 3.
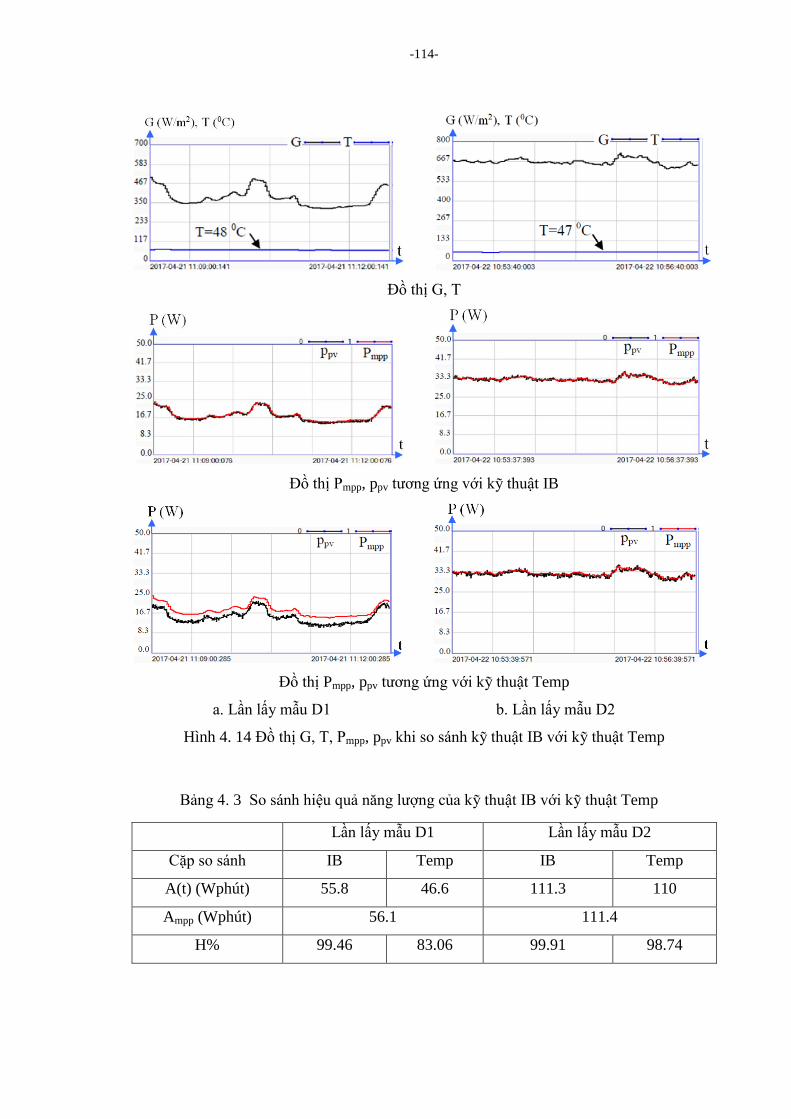
-114-
Đồ thị G, T
Đồ thị Pmpp, ppv tương ứng với kỹ thuật IB
Đồ thị Pmpp, ppv tương ứng với kỹ thuật Temp
a. Lần lấy mẫu D1 b. Lần lấy mẫu D2
Hình 4. 14 Đồ thị G, T, Pmpp, ppv khi so sánh kỹ thuật IB với kỹ thuật Temp
Bảng 4. 3 So sánh hiệu quả năng lượng của kỹ thuật IB với kỹ thuật Temp
Lần lấy mẫu D1 Lần lấy mẫu D2
Cặp so sánh IB Temp IB Temp
A(t) (Wphút) 55.8 46.6 111.3 110
Ampp (Wphút) 56.1 111.4
H% 99.46 83.06 99.91 98.74
-115-
Nhận xét chung về kết quả thực nghiệm đánh giá hiệu quả năng lượng: các
lần lấy mẫu thực nghiệm đều cho thấy MPPT sử dụng kỹ thuật IB luôn giúp đường
ppv bám sát đường Pmpp tại mọi thời điểm với mọi thông số vận hành (G, T). Đối với
MPPT sử dụng các kỹ thuật P&O, CV, Temp, đường ppv chỉ bám đường Pmpp ở một
số thời điểm nhất định hoặc luôn nằm dưới đường Pmpp tùy thuộc vào thông số của
(G, T). Kết quả so sánh hiệu quả năng lượng trong từ bảng 4. 1 đến bảng 4. 3 đều
cho thấy kỹ thuật IB đã giúp khai thác được hầu hết năng lượng khả dụng lớn nhất
có thể phát ra từ PVg (hiệu quả xấp xỉ 100%) trong khi hiệu quả năng lượng của các
kỹ thuật còn lại tùy thuộc rất nhiều vào điều kiện vận hành thực tế ở gần hay xa
STC luôn thấp hơn nhiều so với kỹ thuật IB. Các kết quả thực nghiệm trên đã phản
ánh đúng những nhận định, mô phỏng kiểm chứng trong chương 1 và chương 3.
4.5 Kết luận chương 4
Kết quả thực nghiệm đã đạt được các mục tiêu sau:
- Mô hình thực nghiệm đảm bảo cho việc kiểm chứng một số kết quả nghiên
cứu được.
- Kiểm chứng tính đúng đắn của đề xuất mới thông qua đường đặc tính ppv(t)
luôn trùng với đường Pmpp(t). Trong đó, đường đồ thị Pmpp(t) là kết quả của thuật
toán IB do chip xử lý tính toán được và đường đồ thị ppv(t) là kết quả của việc sử
dụng kỹ thuật AVC để đưa điện áp trung bình ở hai cực của PVg (đo được bằng
thiết bị đo điện áp) về giá trị tính toán được của thuật toán IB (Vmpp). Sự trùng khớp
của kết quả thực nghiệm thu được thông qua mô hình thiết bị thực đã minh chứng
tính đúng đắn của sự kết hợp giữa hệ phương trình quy đổi giá trị các thông số của
PVg từ STC về điều kiện vận hành bất kỳ, thuật toán Newton-Raphson khi xác định
giá trị các thông số ẩn, thuật toán IB trong quá trình tìm MPP, cách xây dựng hàm
n(T) theo phương pháp bình phương cực tiểu với kỹ thuật AVC. Đồng thời, các kết
quả này cũng cho thấy chủng loại PYR và TempS được sử dụng là phù hợp với PVg
sản xuất từ chất bán dẫn.
- Chứng tỏ được phương pháp điều khiển kết hợp kỹ thuật IB với kỹ thuật
AVC đã giúp khả năng bám sát MPP, đảm bảo khả năng khai thác tối đa năng lượng
từ PVg tốt hơn so với những phương pháp trước đây.

-116-
Các kết quả thực nghiệm thu được củng cố độ tin cậy của các nghiên cứu lý
thuyết. Hiện tại, TempS và PYR có độ chính xác cao phù hợp với PVg đã phổ biến
rộng rãi trên thị trường góp phần hiện thực hóa phương pháp điều khiển này cho các
ứng dụng trong thực tế.

-117-
KẾT LUẬN VÀ KIẾN NGHỊ
1. Kết luận
Kết quả nghiên cứu của luận án có đóng góp mới đảm bảo tính khoa học và
thực tiễn:
• Xây dựng mới thành công được một giải pháp giúp xác định chính xác
thông số tại MPP ở thời điểm bất kỳ tương ứng với cặp giá trị (G, T). Giải pháp này
được xây dựng dựa trên các yếu tố: phương pháp Newton-Raphson xác định giá trị
các tham số ẩn ở STC, kỹ thuật IB (dò và chia đôi) xác định thông số tại MPP, hàm
số n(T) dựa trên việc kết hợp kỹ thuật IB với phương pháp bình phương cực tiểu.
• Xây dựng mới thành công cấu trúc điều khiển sử dụng giải pháp đã đề xuất
với kỹ thuật SMC hoặc kỹ thuật AVC cho BBĐ DC/DC buck và BBĐ DC/DC
boost - một khâu thiết yếu trong hệ thống khai thác PVg. Sự kết hợp này đã đem lại
những phương pháp điều khiển khác biệt so với các phương pháp điều khiển trước
đây, giúp nâng cao hiệu quả khai thác năng lượng của PVg.
Ngoài ra, luận án còn đóng góp thêm:
• Xây dựng cấu trúc điều khiển cho BBĐ DC/AC ghép nối lưới khai thác
năng lượng từ PVg. Với cấu trúc điều khiển này, chính cấu trúc điều khiển phía
PVg đã xác định được lượng đặt chính xác về MPP làm lượng đặt cho BBĐ
DC/AC, đảm bảo đẩy được tối đa công suất từ PVg thu được vào lưới. Các kết quả
nghiên cứu đã được kiểm chứng bằng kết quả mô phỏng trong Matlab.
• Xây dựng thành công mô hình thiết bị thực kiểm chứng một số kết quả
nghiên cứu. Mô hình này sử dụng panel SV-55, BBĐ DC/DC buck, DCbus giữ điện
áp cố định, PYR đo G, TempS đo T trong điều kiện vận hành thực tế tại Việt Nam.
Các kết quả thực nghiệm đã cho thấy việc sử dụng giải pháp MPPT đã đề xuất đã
giúp khai thác gần như hoàn toàn năng lượng lớn nhất có thể phát ra từ PVg trong
mọi điều kiện vận hành và khắc phục được các nhược điểm của các kỹ thuật tìm
MPP trước đây. Điều này đã cho thấy tính đúng đắn của giải pháp đã đề xuất với
đối tượng là PVg sản xuất từ các chất bán dẫn và phương pháp điều khiển là phù
-118-
hợp giúp nâng cao khả năng khai thác loại nguồn này trong hệ thống điện, qua đó
thấy được khả năng ứng dụng vào thực tế của các nội dung lý thuyết đã xây dựng.
2. Kiến nghị
Phát triển các kết quả nghiên cứu của luận án cho các hướng nghiên cứu
cùng lĩnh vực:
• Hệ thống có sự tham gia của nhiều nguồn phân tán sử dụng năng lượng tái
tạo.
• Điều khiển các BBĐ đa mức khai thác PVg.
-119-
DANH MỤC CÔNG TRÌNH KHOA HỌC CÓ LIÊN QUAN
ĐẾN LUẬN ÁN ĐÃ CÔNG BỐ
1. Lê Tiên Phong, Ngô Đức Minh (2014), “Research on Designing an Energy Management System for Isolated Photovoltaic Source”, Tạp chí Khoa học và Công nghệ, Đại học Thái Nguyên, ISSN 1859-2171, tập 117, số 13.
2. Ngô Minh Đức, Lê Tiên Phong, Ngô Đức Minh (2015), “Nghiên cứu điều khiển bộ biến đổi điện tử công suất khai thác nguồn pin mặt trời trên mô hình thiết bị thực”, Tạp chí Khoa học và Công nghệ, Đại học Thái Nguyên, ISSN 1859-2171, Tập 132, số 02.
3. Lê Tiên Phong, Ngô Đức Minh (2015), “A New Method to Identify Maximum Power Point for Photovoltaic Generation”, Hội thảo quốc tế IEEE ComManTel 2015 tổ chức tại Đà Nẵng và IEEE Xplore, ISBN: 978-1-4673-6547-5.
4. Lê Tiên Phong, Ngô Đức Minh, Nguyễn Văn Liễn (2016), “Một phương pháp điều khiển mới nâng cao khả năng khai thác nguồn pin mặt trời”, Hội nghị toàn quốc lần thứ 8 về Cơ điện tử - VCM 2016 tổ chức tại Cần Thơ, ISBN: 978-1-4673-6547-5.
5. Lê Tiên Phong, Ngô Đức Minh, Nguyễn Văn Liễn (March 2017), “Improving Efficiency and Response for Photovoltaic Power Generation with DC/DC Buck Converter”, International Journal of Engineering Research and Technology (IJERT), ISSN: 2278-0181, Vol. 6, Issue 3.
-120-
TÀI LIỆU THAM KHẢO Tiếng Việt
[1] Lê Kim Anh (2016), “Nghiên cứu hệ thống điều khiển kết nối lưới sử dụng
nguồn pin quang điện”, Tạp chí Khoa học Đại học Thủ Dầu Một, Vol. 5 (30).
[2] Lê Kim Anh, Huỳnh Dương Khánh Linh (2015), “Điều khiển kết nối lưới cho
nguồn điện pin quang điện kết hợp với nguồn pin nhiên liệu”, Tạp chí Khoa
học Đại học An Giang, Vol. 8 (4), pp. 32-40, ISSN: 0866-8086.
[3] Tạ Văn Đĩnh (2009), “Phương pháp tính”, Nhà xuất bản giáo dục Việt Nam.
[4] Thân Ngọc Hoàn (2009), “Năng lượng điện Mặt trời và những phương pháp
nâng cao chất lượng và hiệu suất”, Tạp chí Khoa học Công nghệ Hàng hải, số
18.
[5] Lại Khắc Lãi, Vũ Nguyên Hải, Trần Gia Khánh (2014), “Điều khiển hệ thống
lai năng lượng gió và mặt trời trong lưới điện thông minh”, Tạp chí Khoa học
và Công nghệ, 118(04): 15-21.
[6] P. Nguyễn (2014), Lưới điện phân tán, Tạp chí Thông tin và Công nghệ
(STINFO), số 9/2014, ISBN 1859-2651, http://www.cesti.gov.vn/khong-gian-
cong-nghe/luoi-dien-phan-tan/content/view/8281/ 286/81/1.html.
[7] Nguyễn Viết Ngư, Lê Thị Minh Tâm, Trần Thị Thường, Nguyễn Xuân
Trường (2015), “So sánh hai thuật toán INC và P&O trong điều khiển bám
điểm công suất cực đại của hệ thống pin quang điện cấp điện độc lập”, Tạp chí
Khoa học và Phát triển, tập 13, số 8,: pp. 1452-1463.
[8] Nguyễn Viết Ngư, Wang Hong-hua, Nguyễn Xuân Trường, Võ Văn Nam, Lê
Thị Minh Tâm (2011), “Mô phỏng bám sát điểm công suất cực đại dàn pin
năng lượng mặt trời dựa trên điều khiển mờ”, Tạp chí Khoa học và Phát triển,
tập 9, số 27.
[9] Nguyễn Doãn Phước (2002), “Lý thuyết điều khiển tuyến tính”, Nhà xuất bản
Khoa học và Kỹ thuật, Quyển 1, in lần thứ 4.
[10] Hà Thị Thu Phương, Nguyễn Tiến Thư, Hồ Phạm Huy Ánh, Cao Văn Kiên
(2016), “Tối ưu công suất MPPT nguồn quang năng PV dùng thuật toán P&O
mờ thích nghi”, Hội nghị toàn quốc lần thứ 8 về Cơ Điện tử - VCM-2016,
ISBN 978-604-913-503-3.

-121-
[11] Vũ Hoàng Phương (2014), “Điều khiển nghịch lưu nguồn Z ứng dụng cho hệ
phát điện phân tán”, luận án Tiến sĩ kỹ thuật, Trường Đại học Bách Khoa Hà
Nội.
[12] Nguyễn Phùng Quang, Phan Thành Chung, Đỗ Thị Loan (2009), “Điều khiển
trượt bộ biến đổi DC-DC tăng áp và giảm áp kiểu quadratic”, Tạp chí Khoa
học và Công nghệ, số 63(1).
[13] Phạm Hữu Sy (2013), “Tương quan thực nghiệm và bình phương bé nhất”,
Tạp chí Khoa học Kỹ thuật Thủy lợi và Môi trường, số 41.
[14] Lương Hoàn Tiến, Nguyễn Minh Khai, Trần Văn Thuận, Ngô Văn Thuyên
(2016), “Bộ nghịch lưu một pha nguồn Z hình T với giải thuật ngắn mạch hỗn
hợp”, Hội nghị toàn quốc lần thứ 8 về Cơ Điện tử - VCM-2016, ISBN 978-
604-913-503-3.
[15] Ngô Mạnh Tiến, Đặng Văn Hiệp, Hà Thị Kim Duyên (2011), “Mô hình hóa,
mô phỏng và thiết kế chế tạo bộ biến đổi công suất cho hệ thống pin năng
lượng mặt trời công suất nhỏ”, Hội nghị toàn quốc về Điều khiển và Tự động
hóa – VCCA-2011.
[16] Lý Ngọc Thắng (2013), “Nghiên cứu thiết kế hệ thống tự động thích ứng với
vị trí mặt trời nhằm nâng cao hiệu quả sử dụng các thiết bị dùng năng lượng
mặt trời”, đề tài nghiên cứu khoa học và công nghệ, Viện năng lượng.
[17] Trần Văn Thuận, Nguyễn Minh Khai, Dương Trường Duy (2016), “Bộ tăng áp
độ lợi cao DC-DC không cách ly”, Hội nghị toàn quốc lần thứ 8 về Cơ Điện tử
- VCM-2016, ISBN 978-604-913-503-3.
[18] Võ Đại Vân, Nguyễn Minh Khai, Trần Tấn Tài, Nguyễn Minh Tâm, Trần Văn
Thuận, Ngô Văn Thuyên (2016), “Nghịch lưu một pha tăng áp bảy bậc”, Hội
nghị toàn quốc lần thứ 8 về Cơ Điện tử - VCM-2016, ISBN 978-604-913-503-3.
Tiếng Anh
[19] A. Elnozahy, Ali K. Abdel Rahman, Ahmed Hamza H. Ali, Mazen Abdel-
Salam, S. Ookawara (January 2016), “Thermal/Electrical Modeling of a PV
Module as Enhanced by Surface Cooling”, Journal of Clean Energy
Technologies, Vol. 4, No. 1.

-122-
[20] A. M. Muzathik (2014), “Photovoltaic Modules Operating Temperature
Estimation Using a Simple Correlation”, International Journal of Energy
Engineering, Vol. 4, Iss. 4.
[21] A. Mellit, M. Drif, A. Malek (2017), “EPNN-based prediction of
meteorological data for renewable energy systems”, Revue des Energies
Renouvelables, Vol. 13, No. 1.
[22] A.B.G. Bahgat, N.H. Helwab, G.E. Ahmadb, E.T. El Shenawy (2005),
“Maximum Power Point Tracking Controller for PV systems using neural
networks”, Renewable Energy, 30, pp 1257-1268.
[23] A.Q. Jakharani, A.K. Othman, A.R.H. Rigit, S.R. Samo (2011), “Comparison
of Solar Photovoltaic Module Temperature Models”, World Applied Sciences
Journal (Special Issue of Food and Environment), ISSN 1818-4952, Vol. 14.
[24] Abel Garcia B., Francisco R. Trejo-M., Felipe Coyotl-M., Ruben Tapia-I,
Hugo Romeo-T (July 2013), “Design and Implementation of a FLC for DC-
DC Converter in a Microcontroller for PV System”, International Journal of
Soft Computing and Engineering (IJSCE), ISSN: 2231-2307, Vol. 3, Issue 3.
[25] Abir Chatterjee (2012), “Modeling and Control of Photovoltaic Generating
Station”, dissertation for degree of philosophy in the Graduate School of the
Ohio State University, 2012.
[26] Adel El Shahat (2010), “Maximum Power Point Genetic Identification
Function for Photovoltaic System”, International Journal of Recent Research
and Applied Studies, Vol. 3(3).
[27] Adel El Shahat (2010), “PV Cell Module Modeling & ANN Simulation for
Smart Grid Application”, Journal of Theoretical & Applied Information
Technology, Vol. 16 Issue 1/2.
[28] Ahmed A. El Tayyan (2011), “PV system behavior based on datasheet”,
Journal of Electron Devices, ISSN: 1682-3427, Vol. 9.
[29] Aissa Chouder, Santiago Silvestre, Nawel Sadaoui, Lazhar Rahmani (2012),
“Modeling and Simlation of A Grid Connected PV System based on the
Evaluation of Main PV Module parameters”, Simulation Modelling Practise
and Theory, Vol. 20, Issue. 1.
-123-
[30] Ali Reza Reisi, Mohammad Hassan Moradi, Shahriar Jamasb (2013),
“Classification and comparison of maximum power point tracking techniques
for photovoltaic system: A review”, Renewable and Sustainable Energy
Reviews, 19, pp 433–443.
[31] Ankur V. Rana, Hiren H. Patel (2013), “Current Controlled Buck Converter
based Photovoltaic Emulator”, Journal of Industrial and Intelligent
Information, Vol. 1, No. 2.
[32] Anmol Ratna Saxena, Shyam Manohar Gupta (2014), “Performance Analysis
of P&O and Incremental Conductance MPPT Algorithms Under Rapidly
Changing Weather Conditions”, Journal of Electrical Systems, 10-3, 2014.
[33] Antonino Riccobono, Enrico Santi (2011), “Positive Feed-Forward Control of
Three-Phase Voltage Source Inverter for DC Input Bus Stabilization”, Applied
Power Electronics Conference and Exposition (APEC), 2011 Twenty-Sixth
Annual IEEE.
[34] Arnold Neumaier (2001), “Introduction to Numerical Analysis”, Cambridge
University Press, ISBN 0-521-33610-4.
[35] Ashok Kurmar, N.S Thakur, Rahul Makade, Maneesh Kumar Shivhare (April
2011), “Optimization of Tilt Angle for Photovoltaic Array”, International
Journal of Engineering Science and Technology (IJEST), Volt. 3, No. 4.
[36] Atul Gupta, Venu Uppuluri Srinivasa (2012), “Design, Simulation and
Verification of Generalized Photovoltaic cells Model Using First Principles
Modeling”, International Journal on Control System and Instrumentation,
Vol. 3, No. 1.
[37] Behrooz Bahrani, Stephan Kenzelmann, Alfred Rufer (July 2011),
“Multivariable-PI-Based dq Current With Superior Axis Decoupling
Capability”, IEEE Transactions on Industrial Electronics, Vol. 58, No. 7.
[38] Daniel Gonz´ alez Montoya, Carlos Andr´ es Ramos Paja, Roberto Giral
(2015), “Improved design of sliding mode controllers based on the
requirements of MPPT techniques”, IEEE Transactions on Power Electronics.
-124-
[39] Eduardo Moreira Vicente, Robson Luiz Moreno, Enio Roberto (2015), “MPPT
Technique Based on Current and Temperature Measurements”, International
Journal of Photoenergy.
[40] Emil A. Jimenez Brea, Eduardo I. Ortiz-Rivera (2010), “Simple Photovoltaic
Solar Cell Dynamic Sliding Mode Controlled Maximum Power Point Tracker
for Battery Charging Applications”, Applied Power Electronics Conference
and Exposition (APEC), 25th Annual IEEE.
[41] Fan Zhang, Jon Maddy, Giuliano Premier, and Alan Guwy (2015), “Novel
current sensing photovoltaic maximum power point tracking based on sliding
mode control strategy”, Solar Energy, Vol. 118.
[42] G. Shobana, P. Sornadeepika, Dr. Ramaprabha (2013), “Global Maximum
Power Point Tracking of Photovoltaic Array under Parital Shaded
Conditions”, International Journal of Engineering Research, Vol. 2, Issue. 3.
[43] Gaga Ahmed, Errahimi Fatima, ES-Sbai Jania (September 2015), “Design and
Simulation of a Solar Regulator Based on DC-DC Converters Using a Robust
Sliding Mode Controller”, Journal of Energy and Power Engineering, David
Publishing, Vol 9.
[44] Gilbert M.Masters (2004), “Renewable and Efficient Electric Power Systems”,
A John Wiley & Son, INC, Publishcation, ISBN: 0-471-28060-7.
[45] Hadi Malek (2014), “Control of Grid-Connected Photovoltaic Systems Using
Fractional Order Operators”, A dissertation submitted in partial fulfillment of
the requirements for the degree of Doctor Phylosophy in Electrical
Engineering, Utal State University.
[46] Hebatallah M. Ibrahim, Jimmy Peng, and Mohamed S. El Moursi (June 2013),
“Dynamic Analysis of Buck-Based Photovoltaic Array Model”, International
Journal of Electrical Energy, Vol. 1, No. 2.
[47] Hebertt Sira-Ramirez, Ramon Silva-Ortigoza, “Control Design Techniques in
Power Electronics Devices”, Springer Publisher, e-ISBN 1-84628-459-7, 2006.
[48] Hicham Fakham, Di Lu, Bruno Francois (2011), “Power Control Design of a
battery charger in a Hybrid Active PV generator for loadfollowing
-125-
applications”, IEEE Transaction on Industrial Electronics, Vol. 58, Iss. 1 , pp.
85-94, TIE-09-1370.
[49] Hiren Patel and Vivek Agarwal (2008), “Matlab-Based Modeling to Study the
Effects of Partial Shading on PV Array Characteristics”, IEEE Transactions
on Energy Conversion, Vol. 23, No. 1.
[50] Hiren Patel and Vivek Agarwal (2008), “Maximum Power Point Tracking
Scheme for PV Systems Operating Under Partially Shaded Conditions”, IEEE
Transactions on Industrial Electronics, Vol. 55, No. 4.
[51] James F. Epperson (2013), “Introduction to Numerical Methods and Analysis”,
Willey & Sons Publisher, Second Edition, ISBN 978-1-118-36759-9.
[52] Jen-Cheng Wang, Jyh-Cherng Shieh, Yu-Li Su, Kun-Chang Kuo, Yen-Wei
Chang, Yu-Ting Liang, Jui-Jen Chou, Kuo-Chi Liao, Joe-Air Jiang (2011), “A
novel method for the determination of dynamic resistance for photovoltaic
modules”, Energy, Vol. 36.
[53] Jiyong Li, Honghua Wang (2009), “Maximum Power Point Tracking of
Photovoltaic Generation Based on the Optimal Gradient Method”, Power and
Energy Engineering Conference, IEEE.
[54] Joe-Air Jiang, Tsong-Liang Huang, Ying-Tung Hsiao, Chia-Hong Chen
(2005), “Maximum Power Tracking for Photovoltaic Power Systems”,
Tamkang Journal of Science and Engineering, Vol. 8, No. 2.
[55] John O. Rawlings, Sastry G. Pantula, David A. Dickey (1998), “Applied
Regression Analysis: A Research Tool”, Springer Publisher, ISBD 0-387-
98454-2.
[56] M. G. Villalva, E. Ruppert F. (2008), “Input-controlled Buck Converter for
Photovoltaic Applications: Modeling and Design”, IET Power Eletronics,
Machines and Drives Conference (PEMD),York, UK.
[57] M. Ramesh, S. Sanjeeva Rayudu and R. Polu Raju (2015), “A New Approach
to Solve Power Balancing Problem in Grid Coupled PV System using Slide
Mode Control”, Indian Journal of Science and Technology, Vol 8(17), August,
ISSN (Online): 0974-5645.
-126-
[58] M.B. Eteiba, E.T. El Shenawy, J.H. Shazly, A.Z. Hafez (2013), “A
Photovoltaic (Cell, Module, Array) Simulation and Monitoring Model using
MATLAB/GUI Interface”, International Journal of Computer Applications,
Volume 69– No.6.
[59] M.C. Alonso Garcia, J. L. Balenzategui (2004), “Estimation of Photovoltaic
Module yearly temperature and performance based on Nominal Operation Cell
Temperature Calculations”, Renewable Energy, Vol. 29.
[60] M.G. Villalva, T.G. de Siqueira, E. Ruppert (2010), “Voltage regulation of
photovoltaic arrays: small-signal analysis and control design”, IET Power
Electronic, Vol. 3, Iss. 6, pp. 869–880.
[61] Marcelo Gradella Villalva, Ernesto Ruppert Filho (2007), “Buck Converter
with Variable Input Voltage for Photovoltaic Apllications”, Pro. 9th Brazilian
Power Electronics Conference, COPEP, Bluemenau, Brazil.
[62] Maria C. Mira, Arnold Knott, Ole C. Thomsen, Michael A. E. Andersen
(2013), “Boost Converter with Combined Control Loop for a Stand-Alone
Photovoltaic Battery Charge System”, IEEE 14th Workshop on Control and
Modeling for Power Electronics.
[63] Mei Shan Ngan, Chee Wei Tan (2011), “Multiple Peaks Tracking Algorithm
using Particle Swarm Optimization Incorporated with Artificial Neural
Network, World Academy of Science, Engineering and Technology, Vol. 58.
[64] Mei Shan Ngan, Chee Wei Tan, Multiple Peaks Tracking Algorithm using
Particle Swarm Optimization Incorporated with Artificial Neural Network”,
World Academy of Science, Engineering and Technology, Vol. 58.
[65] Miguel A. Martinez, Jose M. Andujar, Juan M. Enrique (2014), “Temperature
Measurement in PV Facilities on a Per-Panel Scale”, Sensors, ISSN 1424-
8220, Vol. 14.
[66] Mirjana Milosevic, Goran Anderson, Stevan Grabic (2006), “Decoupling
Current Control and Maximum Power Point Control in Small Power Network
with Photovoltaic Source”, 2006 IEEE PES Power Systems Conference an
Exposition, pp 1005-1011.
-127-
[67] Mohammad Akram Hossain, Yifan Xu, Timothy J. Peshek, Liang Ji, Alexis,
R. Abramson, Roger H. French (2015), “Microinverter Thermal Performance
in the Real-World: Measurements and Modeling”, Plos One, Vol. 7.
[68] Mohammed A. Elgendy, Bashar Zahawi, David J. Atkinson (2012),
“Assessment of Perturb and Observe MPPT Algorithm Implementation
Techniques for PV Pumping Applications”, IEEE Transactions on
Sustainable Energy, Vol. 3, No. 1.
[69] Muhammad H. Rashid, “Power electronics handbook”, Academic Press,
International Standard Book, Number: 0-12-581650-2, 2001.
[70] N. Seddaoui, L. Rahmani, A. Chauder (2010), “Parameters Extraction of
Photovoltaic Module at Reference and Real Conditions”, EFEEA’10
International Symposium on Environment Friendly Energies in Electrical
Applications.
[71] Nabil Karami (2013), “Control of a Hybrid System Based PEMFC and
Photovoltaic Panels”, Thesis for Philosophy Doctor degree, Aix-Marseille
University in Automation.
[72] Nicola Femia, Giovanni Petrone, Giovanni Spagnuolo, Massimo Vitelli (July
2005), “Optimization of Perturb and Observe Maximum Power Point Tracking
Method”, IEEE Transactions on Power Electronics, Vol. 20, No. 4.
[73] O. Gergaud, G. Robin, B. Multon, H. Ben Ahmed (2003), “Energy Modelling
of A Lead-Acid Battery within Hybrid Wind/Photovoltaic Systems”,
European Power Electronic Conference 2003, TOULOUSE : France.
[74] O. Gergaud, G. Robin, H. Ben Ahmed, B. Multon (2003), “Economic
Formalism for Optimizing the Design and Energy Management of A Hybrid
Wind/Photovoltaic System”, International Conference On Renewable
Energies and Power Quality 2003, Vugi (Spain).
[75] Omar Boukli-Hacene (September 2013), “Robust Regulation of the
Photovoltaic Voltage using Sliding Mode Control as Part of a MPPT
Algorithm”, International Journal of Computer Applications, (0975 – 8887),
Vol. 78, No.11.

-128-
[76] Oswaldo Lopez-Santos (2015), “Contribution to the DC-AC conversion in
photovoltaic systems: Module oriented converters”, Thesis for Philosophy
Doctor degree, Institut National des Sciences Appliquées de Toulouse (INSA
de Toulouse) in Automation.
[77] Pawan D. Kale, D.S. Chaudhari (2013), “A Review on Maximum Power Point
Tracking (MPPT) Controlling Methods for A Photovoltaic System”,
International Journal of Emerging Science and Engineering (IJESE), ISSN:
2319-6378, Volume 1, Issue 5, March.
[78] Pawan D. Kale, D.S. Chaudhari (March 2013), “A Study of Efficient
Maximum Power Point Tracking Controlling Methods for Photovoltaic
System”, International Journal of Advanced Research in Computer Science
and Software Engineering, Volume 3, Issue 3.
[79] Petr Mejzlik (1994), “A Bisection Method to Find All Solutions of a System
of Nonlinear Equations”, Contemporary Mathematics, Vol. 180.
[80] Poom Konghuay Rob, Somyot Kaitwanidvilai (2014), “Maximum Power
Point Tracking Using Hybrid Fuzzy Based P&O and Back Propagation (BP)
Neural Network for Photovotaic System”, International Journal of Innovative,
Computing, Information and Control, Vol. 10, No. 5.
[81] R. Leyva, C. Alonso, I. Queinnec, A. Cid-Pastor, D. Lagrange, L. Martinez-
Salamero (2006), “MPPT of Photovoltaic Systems using Extremum-Seeking
Control”, IEEE Transactions on Aerospace and Electronic Systems and
Electronic Systems, Vol. 42, No. 1.
[82] R. Leyva, C. Olalla, H. Zazo, C. Cabal, A. Cid-Pastor, I. Queinnec, C. Alonso
(2012), “MPPT based on Sinusoidal Extremum-Seeking Control in PV
Generation”, Internaltional Journal of Photoenergy, Hindawi Publishing
Corporation.
[83] R. Ramaprabha, B.L Mathur (January 2011), “Intelligent Controller based
Maximum Power Point Tracking for Solar PV System”, International Journal
of Computer Applications (0975-8887), Vol. 12, No. 10.
[84] Ranbir Soram, Sudipta, Soram Rakesh Singh, Memeta Khomdram, Swavana
Yaikhom, Sonamani (2013), “On the Rate of Convergence of Newton-

-129-
Raphson Method”, The International Journal of Engineering and Science
(IJES), Vol. 2, Issue 11.
[85] Ravinder K. Kharb, Md. Fahim Ansari, S. L. Shimi (2014), “Design and
Implementation of ANFIS based MPPT Scheme with Open Loop Boost
Converter for Solar PV Module”, International Journal of Advanced Research
in Electrical, Electronics and Instrumentation Engineering, Vol. 3, Issue 1.
[86] Reham Haroun, Abdelali El Aroudi, Angel Cid-Pastor, Germain Garica,
Carlos Olalla, and Luis Martinez-Salamero (June 2015), “Impedance
Matching in Photovoltaic Systems Using Cascaded Boost Converters and
Sliding-Mode Control”, IEEE Transactions on Power Electronics, Vol. 30,
No. 6, June 2015.
[87] Remus Teodorescu, Marco Liserre, Pedro Rodriguez (2011), “Grid Converter
for Photovoltaic and Wind Power System”, John Wiley and Sons Publisher,
ISBN 978-0-470-05751-3.
[88] Sanford Weiberg (2005), “Applied Linear Regression”, John Willey&Sons,
InC., Publishcation, ISBN 0-471-66379-4.
[89] Seddik Bacha, Lulian Munteanu, Antoneta Luliana Bratcu (2014), “Power
Electronic Converters Modeling and Control”, Springer Publisher, ISBN 978-
1-4471-5478-5.
[90] Siew-Chong Tan, Yuk-Ming Lai, Chi Kong Tse (2012), “Sliding Mode
Control of Switching Power Converters – Techniques and Implementation”,
CRC Press, Taylor and Francis Group.
[91] Steven C. Chapra, Raymond P. Canale (2010), “Numerical Methods for
Engineers”, McGraw-Hill, ISBN 978-0-07-340106-5.
[92] Sulaimon Mutiu O. (2015), “Application of Weighted Least Squares
Regression in Forecasting”, International Journal of Recent Research in
Interdisciplinary Sciences (IJRRIS), Vol. 2, Issue 3.
[93] Syafaruddin, Hiyama, Takashi (2008), “ANN based Optiaml Operating Points
of PV Array under Partially Shaded Condition”, The International Conference
on Electrical Engineering, Okinawa, Japan.

-130-
[94] T. Pavlovic, Z. Pavlovic, L. Pantic, Lj. Kostic (2010), “Determining Optimum
Tilt Angles and Orientations of Photovoltaic Panels in Nis, Serbia”,
Contemporary Material I-2.
[95] Tao Zhou and Bruno François (2010), “Energy Management and Power
Control of a Hybrid Active Wind Generator for Distributed Power Generation
and Grid Integration”, IEEE Transactions on Industrial Electronics.
[96] Tatjana Kalitjuka (2011), “Control of Voltage Source Converters for Power
System Applications”, Master of Science in Electric Power Engineering,
Norwegian University of Science and Technology.
[97] Teresa Orłowska-Kowalska, Frede Blaabjerg, José Rodríguez (2014),
“Advanced and Intelligent Control in Power Electronics and Drives”, Springer
Publisher, Volume 531, ISBN 978-3-319-03401-0.
[98] Texas Instrument (2013), “LM35 Precision Centigrade Temperature Sensors”,
http://www.farnell.com/datasheets/1848945.pdf.
[99] The Institute of Electrical and Electronics Engineers, Inc, IEEE Standard 1547
for Interconnecting Distributed Resources with Electric Power Systems, 28
July 2003,
http://fglongatt.org/OLD/Archivos/Archivos/SistGD/IEEE1547.pdf.
[100] Vernier (2013), http://www.vernier.cz/katalog/manualy/en/pyr-bta.pdf
[101] William H. Press, Saul A. Teukolsky, William T. Vetterling, Brian P. Flannery
(2002), “Numerical Recipes in C – The Art of Scientific Computing”, The
Press Sysndicate of University of Cambridge, ISBN 0-521-43108-5.
[102] Xin Yan, Xiao Gang Su (2009), “Linear Regression Analysis–Theory and
Computing”, World Scientific Publishing Co.Pte.Ltd, ISBN 978-981-283-410-2.
[103] Yann Riffonneau, Seddik Bacha (2011), “Optimal Power Flow Management
for Grid Connected PV Systems With Batteries”, IEEE Transactions on
Sustainable Energy, Vol. 2, No. 3.
[104] Yoash Levron and Doron Shmilovitz (March 2013), “Maximum Power Point
Tracking Employing Sliding Mode Control”, IEEE Transactions on Circuits
and Systems, Vol. 60, No. 3.

-131-
[105] Yu Zhang (2011), “Small-Signal Modeling and Analysis of Parallel-
Connected Power Converter Systems for Distributed Energy Resources”,
Dissertation for degree of Doctor of Philosophy, University of Miami.
[106] Yuan-Kang Wu, Chao-Rong Chen, Hasimah Abdul Rahman (2014), “A
Novel Hybrid Model for Short-Term Forecasting in PV Power Generation”,
International Journal of Phtoenergy, Hindawi Publishing Corporation,
Volume 14.

132
PHỤ LỤC 1. Thiết lập hệ phương trình tại các điểm đặc biệt, ma trận Jacobian và ma trậnnghịch đảo của Jacobian cho bài toán xác định thông số ẩn
- Các thành phần của ma trận Jacobian:
( )1
1
F x1
x∂
=∂
( )1 3 4 4
2 5 3
F x a a xexp 1x a x
∂ += − + ∂
( ) ( )1 2 3 4 4 3 4 42
3 5 35 3
F x x a a x a a x.expx a xa x
∂ + += ∂
( )1 3 4 44 2 4
4 5 3 5 3 5
F x a a xa x aexpx a x a x x
∂ += − − ∂
( )1 3 4 42
5 5
F x a a xx x
∂ +=
∂
( )2
1
F x1
x∂
=∂
( )2 1 4
2 5 3
F x a xexp 1x a x
∂ = − + ∂
( )2 1 4 2 1 42
3 5 3 5 3
F x a x x a xexpx a x a x
∂ = ∂
( )2 1 1 2 1 4
4 5 5 3 5 3
F x a a x a xexpx x a x a x
∂ = − − ∂
( )2 1 42
5 5
F x a xx x
∂=
∂
( )3
1
F x1
x∂
= −∂
( )3 2
2 5 3
F x aexp 1x a x
∂ = − ∂
( )3 2 2 22
3 5 3 5 3
F x a x aexpx a x a x
∂ = − ∂
( )3
4
F x0
x∂
=∂
( )3 22
5 5
F x ax x
∂= −
∂
( )4
1
F x1
x∂
=∂
( )3 3 4 4
4 3 33 4 42
2 3 3 4 42 4 4
3 3 5
a a a xexpF x x xa a x1 exp
x x a a xx x x1 expx x x
+ ∂ + = − − ∂ +
+ +
( )3 2 3 4 4 3 4 4
24 3 3 32 3 4 4
223 3 3 4 42 4 4
3 3 5
a x a a x a a x1 expF x x x xx (a a x )
x x a a xx x x1 expx x x
+ ++ ∂ + = +
∂ ++ +

-133-
3 4 44 4 2 4
4 3 3 5
3 4 4 3 4 44 2 2 4 4
3 3 3 3 5
3 4 4 3 4 42 2 4 4
3 3 5 3 3 3 53
3 4 42 4
3 3
a a xF a x aexpx x x x
a a x a a xa x x x xexp 1 expx x x x x
a a x a a xx x a x1 1exp 1 expx x x x x x x
aa a xx x1 exp
x x
+∂= − − ∂
+ ++ +
+ +
− + + + −
++
24
5
xx
+
34 4 42 2
5 5 2 3 4 42 4 45
3 3 5
aF a xx x a a xx x xx 1 exp
x x x
∂= +
∂ ++ +
2 4 1 4 45 2
5 3 5 5 3 5
x x a x xF 1 expa x x a x x
= − +
( )5
1
F x0
x∂
=∂
( )5 4 1 4
2 5 3 5 5 3
F x x a x1 1 expx a x x a x
∂ = − ∂
( ) ( )5 5 3 1 4 5 2 4 1 42 3
3 5 3 5 5 3
F x a x a x a x x a x1 expx a x x a x
∂ + = − ∂
( )5 2 1 2 4 1 42
4 5 3 5 5 3 5 3 5 5 3 5
F x x a x x a x 11 expx a x x a x a x x a x x
∂ = + − + ∂
( )5 2 4 1 4 42 3
5 5 3 5 5 3 5
F x x x a x 2xexpx a x x a x x
∂ = − − ∂
- Chương trình xác định thông số ẩn clc; clear; a1=7.36; a2=30.4; a3=24.2; a4=6.83; a5=1;
x1=7.36; x2=0.104*10^(-4); x3=1.31; x4=0.251; x5=1168; X=[x1;x2;x3;x4;x5]; esp=0.1; N=0; dk=1; while (dk==1) f1=x1-x2*exp((a3+a4*x4)/(a5*x3))+x2-(a3+a4*x4)/x5-a4;
f2=x1-x2*exp((a1*x4)/(a5*x3))+x2-(a1*x4)/x5-a1; f3=x2*exp(a2/(a5*x3))+a2/x5-x2-x1; P=x1-x2*(exp((a3+a4*x4)/(a5*x3))-1)-(a3+a4*x4)/x5; Q=-x2/(a5*x3)*exp((a3+a4*x4)/(a5*x3))-1/x5;
-134-
R=(x2*x4/(a5*x3)*exp((a3+a4*x4)/(a5*x3))+x4/x5)*(x2/(a5*x3)*exp((a3+a4*x4)/(a5*x3))+1/x5);
S=(1+x2*x4/(a5*x3)*exp((a3+a4*x4)/(a5*x3))+x4/x5); f4=P+a3*(Q+R/S); f5=(x2/(a5*x3))*(x4/x5-1)*exp(a1*x4/(a5*x3))+x4/(x5*x5);
F=[f1;f2;f3;f4;f5]; j11=1; j12=1-exp((a3+a4*x4)/(a5*x3));
j13=(x2*(a3+a4*x4)/(a5*x3*x3))*exp((a3+a4*x4)/(a5*x3)); j14=-((a4*x2)/(a5*x3))*exp((a3+a4*x4)/(a5*x3))-a4/x5; j15=(a3+a4*x4)/(x5*x5);
j21=1;j22=1-exp((a1*x4)/(a5*x3)); j23=(a1*x2*x4)/(a5*x3*x3)*exp((a1*x4)/(a5*x3)); j24=-a1/x5-(a1*x2)/(a5*x3)*exp((a1*x4)/(a5*x3)); j25=(a1*x4)/(x5*x5);
j31=-1; j32=exp(a2/(a5*x3))-1; j33=-(a2*x2)/(a5*x3*x3)*exp((a2)/(a5*x3)); j34=0; j35=-a2/(x5*x5);
j41=1; j42=1-exp((a3+a4*x4)/x3)-((a3/x3)*exp((a3+a4*x4)/x3)/(1+(x2*x4/x3)* exp((a3+a4*x4)/x3)+x4/x5)^2;
j43=x2*(a3+a4*x3)/x3^2+(a3*x2/x3^2)+(a3*x2/x3^2)*(1+(a3+a4*x4)/x3)* exp((a3+a4*x4)/x3)/ (1+(x2*x4/x3)* exp((a3+a4*x4)/x3)+x4/x5)^2;
j44=-(a4*x2/x3)* exp((a3+a4*x4)/x3)-a4/x5-a3*(-((x2/x3)* exp((a3+a4*x4)/x3)+1/x5)*((x2/x3)*(1+a4*x4/x3)* exp((a3+a4*x4)/x3)+1/x5)/ (1+(x2*x4/x3)* exp((a3+a4*x4)/x3)+x4/x5)^2;
j45=a4*x4/x5^2+a3/(x5^2*(1+(x2*x4/x3)* exp((a3+a4*x4)/x3)+x4/x5)^2); j51=0;j52=(1/(a5*x3))*(x4/x5-1)*exp((a1*x4)/(a5*x3));
j53=-(x2/(a5*x3*x3))*(x4/x5-1)*exp((a1*x4)/(a5*x3))-((a1*x2*x4)/(a5*x3*x3*x3))*(x4/x5-1)*exp((a1*x4)/(a5*x3)); j54=((x2/(a5*x3*x5))+((a1*x2)/(a5*a5*x3*x3))*(x4/x5-1))*exp((a1*x4)/(a5*x3))+1/(x5*x5); j55=-2*x4/(x5*x5*x5)-(x2*x4/(a5*x3*x5*x5))*exp((a1*x4)/(a5*x3));
J=[j11 j12 j13 j14 j15;j21 j22 j23 j24 j25;j31 j32 j33 j34 j35;j41 j42 j43 j44 j45;j51 j52 j53 j54 j55]; A=F;X=X-inv(J)*F;x1=X(1,1);x2=X(2,1);x3=X(3,1);x4=X(4,1);x5=X(5,1); f1=x1-x2*exp((a3+a4*x4)/(a5*x3))+x2-(a3+a4*x4)/x5-a4; f2=x1-x2*exp((a1*x4)/(a5*x3))+x2-(a1*x4)/x5-a1; f3=x2*exp(a2/(a5*x3))+a2/x5-x2-x1; P=x1-x2*(exp((a3+a4*x4)/(a5*x3))-1)-(a3+a4*x4)/x5; Q=-x2/(a5*x3)*exp((a3+a4*x4)/(a5*x3))-1/x5; R=(x2*x4/(a5*x3)*exp((a3+a4*x4)/(a5*x3))+x4/x5)*(x2/(a5*x3)*exp((a3+a4*x4)/(a5*x3))+1/x5);
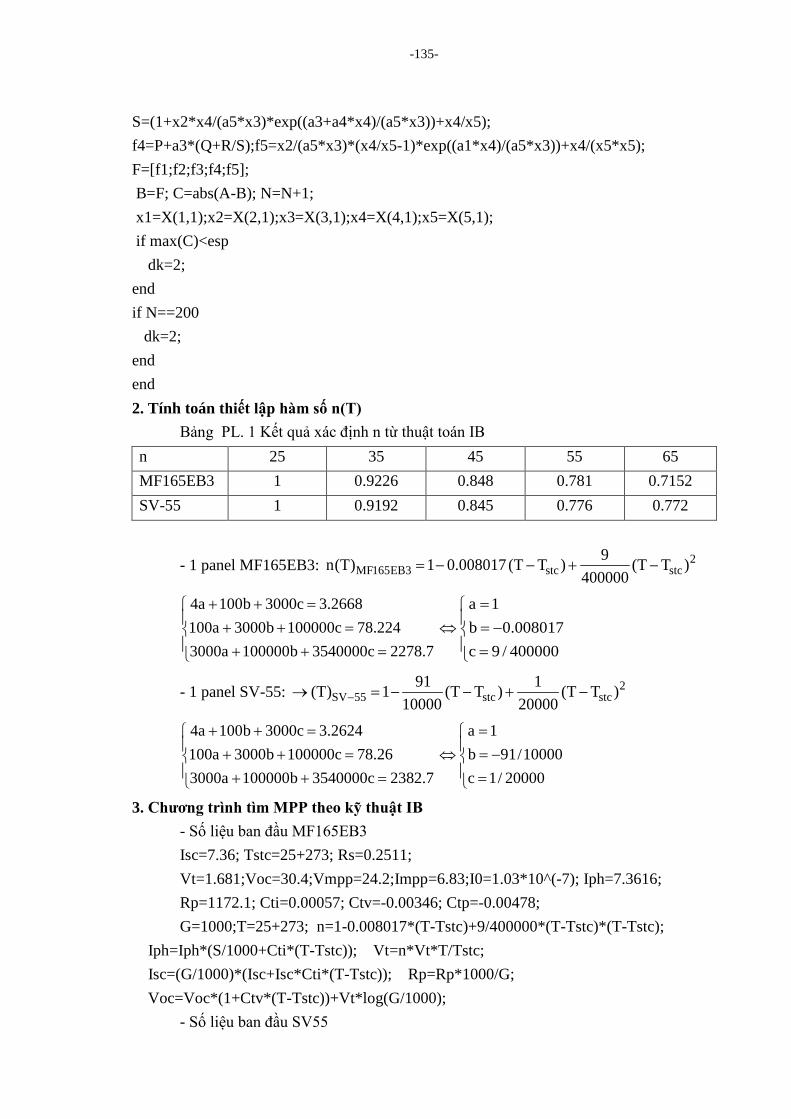
-135-
S=(1+x2*x4/(a5*x3)*exp((a3+a4*x4)/(a5*x3))+x4/x5); f4=P+a3*(Q+R/S);f5=x2/(a5*x3)*(x4/x5-1)*exp((a1*x4)/(a5*x3))+x4/(x5*x5); F=[f1;f2;f3;f4;f5]; B=F; C=abs(A-B); N=N+1; x1=X(1,1);x2=X(2,1);x3=X(3,1);x4=X(4,1);x5=X(5,1); if max(C)<esp dk=2; end if N==200 dk=2; end end 2. Tính toán thiết lập hàm số n(T) Bảng PL. 1 Kết quả xác định n từ thuật toán IB n 25 35 45 55 65 MF165EB3 1 0.9226 0.848 0.781 0.7152 SV-55 1 0.9192 0.845 0.776 0.772
- 1 panel MF165EB3:
2MF165EB3 stc stc
9n(T) 1 0.008017 (T T ) (T T )400000
= − − + −
=++=++
=++
7.2278c3540000b100000a3000224.78c100000b3000a100
2668.3c3000b100a4
=−=
=⇔
400000/9c008017.0b
1a
- 1 panel SV-55: 2SV 55 stc stc
91 1(T) 1 (T T ) (T T )10000 20000−→ = − − + −
=++=++
=++
7.2382c3540000b100000a300026.78c100000b3000a100
2624.3c3000b100a4
=−=
=⇔
20000/1c10000/91b
1a
3. Chương trình tìm MPP theo kỹ thuật IB - Số liệu ban đầu MF165EB3
Isc=7.36; Tstc=25+273; Rs=0.2511; Vt=1.681;Voc=30.4;Vmpp=24.2;Impp=6.83;I0=1.03*10^(-7); Iph=7.3616; Rp=1172.1; Cti=0.00057; Ctv=-0.00346; Ctp=-0.00478; G=1000;T=25+273; n=1-0.008017*(T-Tstc)+9/400000*(T-Tstc)*(T-Tstc);
Iph=Iph*(S/1000+Cti*(T-Tstc)); Vt=n*Vt*T/Tstc; Isc=(G/1000)*(Isc+Isc*Cti*(T-Tstc)); Rp=Rp*1000/G; Voc=Voc*(1+Ctv*(T-Tstc))+Vt*log(G/1000); - Số liệu ban đầu SV55
-136-
Isc=3.25; Tstc=25+273; Rs=0.151;Rp=1675.9; Vt=1.141;Voc=22.14; Vmpp=18.4;Impp=3.06;I0=1.623*10^(-8); Iph=3.2502; Cti=0.00047;Ctv=-0.000743;Ctp=-0.00451;
G=1000;T=25+273;n=1-91/10000*(T-Tstc)+(T-Tstc)*(T-Tstc)/20000; Iph=Iph*(G/1000+Cti*(T-Tstc)); Vt=n*Vt*T/Tstc;
Isc=S/1000*(Isc+Isc*Cti*(T-Tstc));Rp=Rp*1000/G; Voc=Voc*(1+Ctv*(T-Tstc))+Vt*log(G/1000); - Chương trình tìm MPP
% chuong trinh tinh I1 A=0.01:0.01:Isc; j=1; for n1=0.01:0.01:Isc I1=n1; dongdien=Iph-I0*(exp((V(i)+I1*Rs)/Vt)-1)-(V(i)+I1*Rs)/Rp; saiso=abs(dongdien-I1); Ci(j)=saiso; j=j+1; end B=min(Ci); L=length(Ci); for j=1:1:L if B==Ci(j) I(i)=j/100; end end clear B L Ci j A n1 saiso I1 dongdien % chuong trinh tinh I2 A=0.01:0.01:Isc; j=1; for n1=0.01:0.01:Isc I1=n1; dongdien=Iph-I0*(exp((V(i+1)+I1*Rs)/Vt)-1)-(V(i+1)+I1*Rs)/Rp; saiso=abs(dongdien-I1); Ci(j)=saiso; j=j+1; end B=min(Ci); L=length(Ci); I1=0; for j=1:1:L if B==Ci(j) I(i+1)=j/100; end end clear B L Ci j A n1 saiso I1 dongdien % chuong trinh tinh I3 A=0.01:0.01:Isc; j=1; for n1=0.01:0.01:Isc I1=n1;
-137-
dongdien=Iph-I0*(exp((V(i+2)+I1*Rs)/Vt)-1)-(V(i+2)+I1*Rs)/Rp; saiso=abs(dongdien-I1); Ci(j)=saiso; j=j+1; end B=min(Ci); L=length(Ci); I1=0; for j=1:1:L if B==Ci(j) I(i+2)=j/100; end end clear B L Ci j A n1 saiso I1 dongdien % chuong trinh tinh I4 A=0.01:0.01:Isc; j=1; for n1=0.01:0.01:Isc I1=n1; dongdien=Iph-I0*(exp((V(i+3)+I1*Rs)/Vt)-1)-(V(i+3)+I1*Rs)/Rp; saiso=abs(dongdien-I1); Ci(j)=saiso; j=j+1; end B=min(Ci); L=length(Ci); I1=0; for j=1:1:L if B==Ci(j) I(i+3)=j/100; end end clear B L Ci j A n1 saiso I1 dongdien clc; clear; nhapdulieubandau; V=zeros(1,30); I=zeros(1,30); i=1 ; V(i)=0;deltaV=a2/10; V(i+1)=V(i)+deltaV;V(i+2)=V(i)+2*deltaV; chuongtrinhtinhI1;chuongtrinhtinhI2;chuongtrinhtinhI3; P(i)=V(i)*I(i); P(i+1)=V(i+1)*I(i+1);P(i+2)=V(i+2)*I(i+2); esp=0.1; dk=1;solanlap=0; while (i<200)&(dk==1) solanlap=solanlap+1; if (P(i)<P(i+1)) if (P(i+1)>P(i+2))|(P(i+1)==P(i+2)) V(i+3)=V(i+1)+0.5*deltaV/k; k=k+1; else V(i+3)=V(i+2)+0.5*deltaV;

-138-
end end if (P(i)==P(i+1))|(P(i)>P(i+1)) V(i+3)=V(i+1)-0.5*deltaV/k; k=k+1; end chuongtrinhtinhI4; P(i+3)=V(i+3)*I(i+3); Pmax1=P(i+3); Vmax1=V(i+3); maxP1=[P(i),P(i+1),P(i+2)]; maxP=max(maxP1); saisoP=abs(P(i+3)-maxP); i=i+1; if saisoP<esp dk=2; Pmax=P(i+2); Vmax=V(i+2); Imax=I(i+2); else dk=1; end end 4. Tính toán các thông số phía BBĐ DC/DC (với 1 panel MF165EB3)
Vdc=12V, fx=50 kHz.
Thông số cuộn cảm, tụ điện phía PVg:
3dc
12L 3.51 10 H6.83 0.01 50000
−≥ = ×× ×
5pv 2
2 165 0.001C 5.63 10 F24.2
−× ×≥ = ×
Chọn Ldc=8 mH, Rdc=0.5 Ω, Cpv=1 mF với BBĐ DC/DC buck, Cpv=0.1 mF với
BBĐ DC/DC boost.
5. Thiết lập mô phỏng mặt trượt và tín hiệu điều khiển tương đương
5.1 BBĐ DC/DC buck function [h,ueq] = Calculate(vpv,G,T,ipv,ic,Pmpp) k=0;r=0;T=T+273; Iscstc=7.36; Vmppstc=24.2;Imppstc=6.83; Vocstc=30.2;Tstc=25+273;Rs=0.2511; Iphstc=7.3616;Vtstc=1.6814; I0=1.03*10^(-7); Rp=1172.1;Cti=0.00057;Ctv=-0.00346; Iph=Iphstc*(G/1000+Cti*(T-Tstc)); n=1-0.008017*(T-Tstc)+9/400000*(T-Tstc)*(T-Tstc); Vt=n*Vtstc*T/Tstc;Isc=G/1000*Iscstc*(1+Cti*(T-Tstc)); Rp=Rp*1000/G; b=-((I0/Vt)*exp((vpv+ipv*Rs)/Vt)+1/Rp)/(1+(I0*Rs/Vt)*exp((vpv+ipv*Rs)/Vt)+Rs/Rp); C=0.001;L=0.008;R=0.5;fs=50000;Vdc=12; Ka=-0.05*G/1000; ueq=((ipv+b*vpv)*ipv/C+Ka*(Vdc+R*ipv)/L)/(iL*(ipv+b*vpv)/C+Ka*vpv/L); h=(ipv*vpv-Pmpp)+Ka*ic); end 5.2 BBĐ DC/DC boost function [h,ueq] = Calculate(vpv,G,T,ipv,ic,Vmpp) ueq=0;a=0;h=0; T=T+273; Iscstc=7.36; Vmppstc=24.2;Imppstc=6.83;

-139-
Vocstc=30.2;Tstc=25+273; Gstc=1000; Rs=0.2511; Iphstc=7.3616;Vtstc=1.6814;I0=1.03*10^(-7); Rp=1172.1*1000/G;Cti=0.00057;Ctv=-0.00346; Iph=Iphstc*(G/1000+Cti*(T-Tstc)); n=1-0.008017*(T-Tstc)+9/400000*(T-Tstc)*(T-Tstc);Vt=n*Vtstc*T/Tstc; a=-((I0/Vt)*exp((vpv+ipv*Rs)/Vt)+1/Rp)/(1+(I0*Rs/Vt)*exp((vpv+ipv*Rs)/Vt)+Rs/Rp); C=0.0001;L=0.008;R=0.5;fs=50000;Vdc=48; Kb=-0.183*G/1000;Kc=-1; h=Kb*(vpv-Vmpp)+Kc*ic; ueq=(Vdc-vpv)/Vdc+L*(Kb/Kc+a)*ic/(Vdc*C); end 6. Mô phỏng với 1 panel PVg
6.1 Kết quả tính toán năng lượng thu được để vẽ đồ thị hiệu suất
Đồ thị hiệu suất đã biểu diễn trên các hình từ hình 3.29 đến hình 3.34 được thiết lập
thông qua việc tính toán năng lượng tương ứng với 3 mức G khác nhau (cao G=1000W/m2,
trung bình G=600W/m2, thấp G=200W/m2) trong khoảng thời gian vận hành 3s.
Bảng PL. 2 Kết quả tính toán với 1 panel MF165EB3 khi sử dụng các kỹ thuật tìm
MPP khác nhau tương ứng với BBĐ DC/DC buck tính trong 3s
T (0C)
G (W/m2)
IB-SMC (Ws x3)
IB-AVC (Ws x3)
P&O (Ws x3)
OV-AVC
(Ws x3)
CV-AVC
(Ws x3)
Temp-AVC
(Ws x3)
Pmpp (W x3)
25 1000 164.9 165 160.5 123.7 165 165 165.2 600 98.28 98.18 88.59 73.03 98.07 98.08 98.4 200 31.16 31.08 21.02 22.57 30.29 30.29 31.2
35 1000 157.4 157.5 153.7 115.7 153.7 157.3 157.85 600 94.36 94.26 86.11 69.22 91.04 93.77 94.63 200 30.44 30.4 21.08 21.94 26.48 28.68 30.6
45 1000 149.8 150 146.6 106.3 130.6 148.5 150.21 600 90.33 90.29 83.68 64.46 75.72 88.86 90.54 200 29.58 29.71 20.89 21.15 17.3 26.96 29.97
55 1000 142.2 142.4 139.2 95.11 90.37 138.6 142.57 600 86.17 86.18 80.58 58.56 46.71 83.15 86.4 200 29.11 28.92 20.78 20.16 0.71 24.75 29.18
65 1000 134.5 134.7 131.7 82.11 33.35 127.4 134.84 600 81.99 82.02 77.43 51.11 0.97 76.53 82.23 200 28.15 28.01 20.53 18.22 0 22.12 28.32
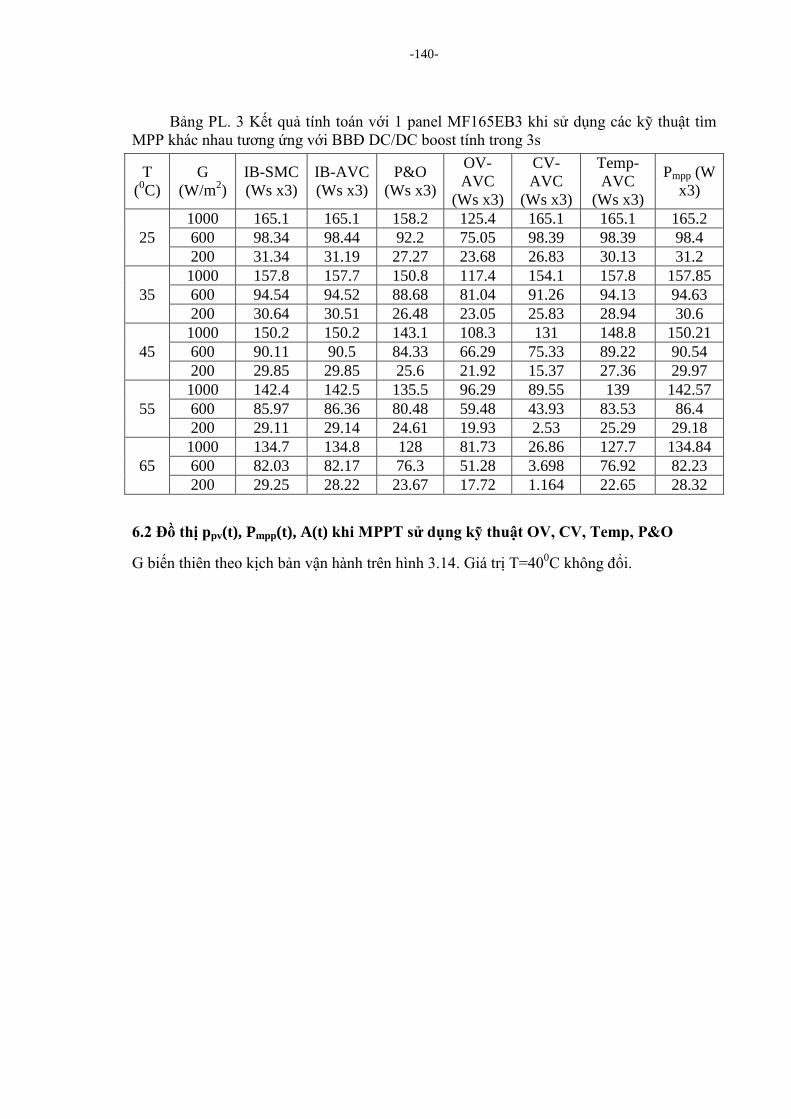
-140-
Bảng PL. 3 Kết quả tính toán với 1 panel MF165EB3 khi sử dụng các kỹ thuật tìm MPP khác nhau tương ứng với BBĐ DC/DC boost tính trong 3s
T (0C)
G (W/m2)
IB-SMC (Ws x3)
IB-AVC (Ws x3)
P&O (Ws x3)
OV-AVC
(Ws x3)
CV-AVC
(Ws x3)
Temp-AVC
(Ws x3)
Pmpp (W x3)
25 1000 165.1 165.1 158.2 125.4 165.1 165.1 165.2 600 98.34 98.44 92.2 75.05 98.39 98.39 98.4 200 31.34 31.19 27.27 23.68 26.83 30.13 31.2
35 1000 157.8 157.7 150.8 117.4 154.1 157.8 157.85 600 94.54 94.52 88.68 81.04 91.26 94.13 94.63 200 30.64 30.51 26.48 23.05 25.83 28.94 30.6
45 1000 150.2 150.2 143.1 108.3 131 148.8 150.21 600 90.11 90.5 84.33 66.29 75.33 89.22 90.54 200 29.85 29.85 25.6 21.92 15.37 27.36 29.97
55 1000 142.4 142.5 135.5 96.29 89.55 139 142.57 600 85.97 86.36 80.48 59.48 43.93 83.53 86.4 200 29.11 29.14 24.61 19.93 2.53 25.29 29.18
65 1000 134.7 134.8 128 81.73 26.86 127.7 134.84 600 82.03 82.17 76.3 51.28 3.698 76.92 82.23 200 29.25 28.22 23.67 17.72 1.164 22.65 28.32
6.2 Đồ thị ppv(t), Pmpp(t), A(t) khi MPPT sử dụng kỹ thuật OV, CV, Temp, P&O
G biến thiên theo kịch bản vận hành trên hình 3.14. Giá trị T=400C không đổi.
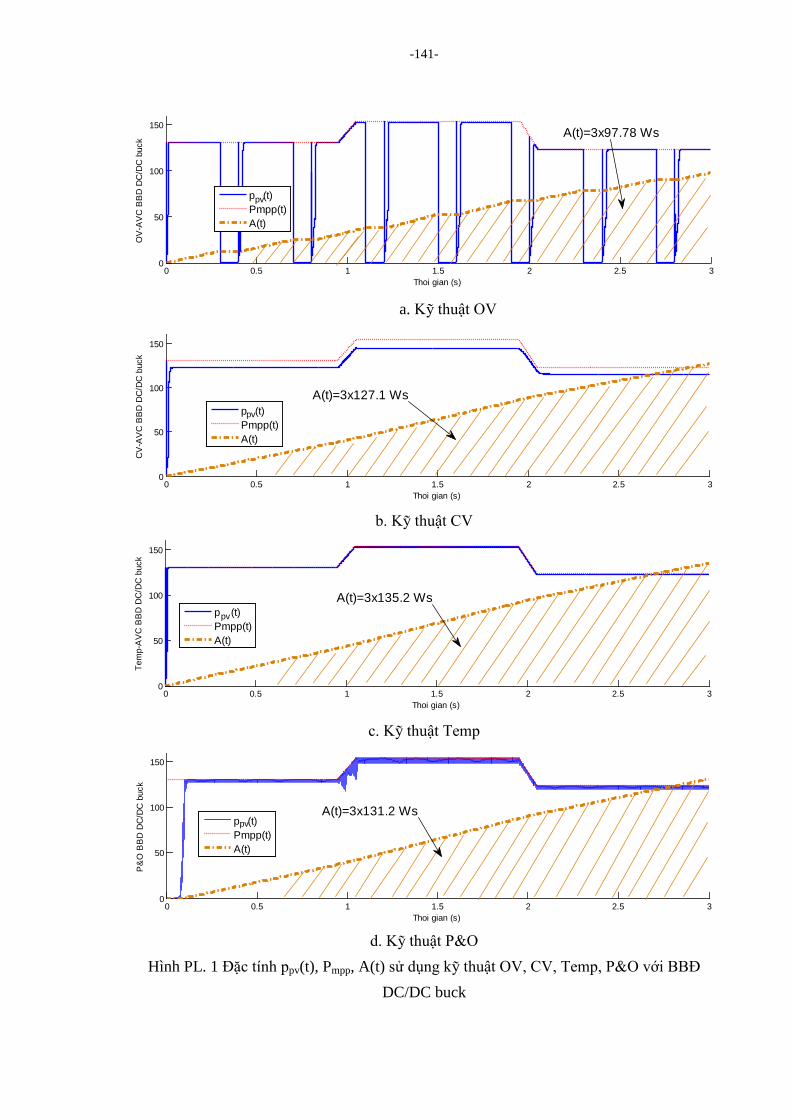
-141-
a. Kỹ thuật OV
b. Kỹ thuật CV
c. Kỹ thuật Temp
d. Kỹ thuật P&O
Hình PL. 1 Đặc tính ppv(t), Pmpp, A(t) sử dụng kỹ thuật OV, CV, Temp, P&O với BBĐ DC/DC buck
0 0.5 1 1.5 2 2.5 30
50
100
150
Thoi gian (s)
OV
-AV
C B
BD
DC
/DC
buc
k
p (t)Pmpp(t)A(t)
A(t)=3x97.78 Ws
pv
0 0.5 1 1.5 2 2.5 30
50
100
150
Thoi gian (s)
CV
-AV
C B
BD
DC
/DC
buc
k
p (t)Pmpp(t)A(t)
A(t)=3x127.1 Wspv
0 0.5 1 1.5 2 2.5 30
50
100
150
Thoi gian (s)
Tem
p-A
VC
BB
D D
C/D
C b
uck
p (t)Pmpp(t)A(t)
A(t)=3x135.2 Wspv
0 0.5 1 1.5 2 2.5 30
50
100
150
Thoi gian (s)
P&
O B
BD
DC
/DC
buc
k
p (t)Pmpp(t)A(t)
A(t)=3x131.2 Wspv
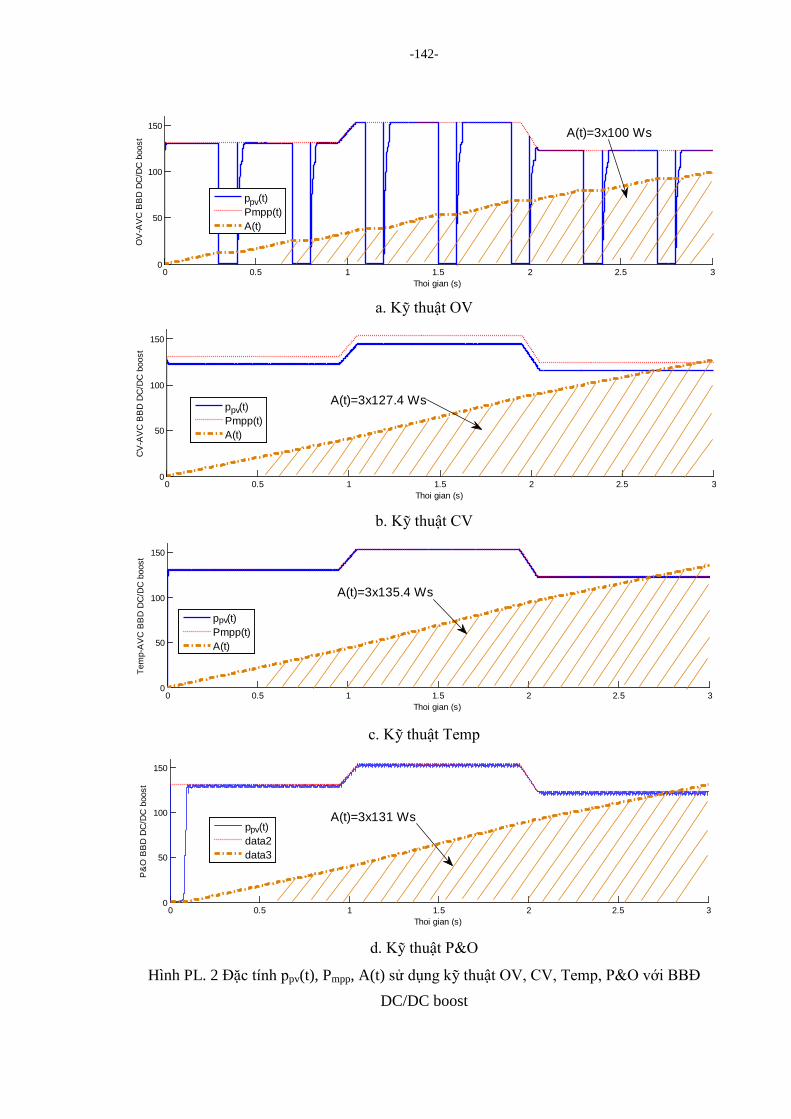
-142-
a. Kỹ thuật OV
b. Kỹ thuật CV
c. Kỹ thuật Temp
d. Kỹ thuật P&O
Hình PL. 2 Đặc tính ppv(t), Pmpp, A(t) sử dụng kỹ thuật OV, CV, Temp, P&O với BBĐ DC/DC boost
0 0.5 1 1.5 2 2.5 30
50
100
150
Thoi gian (s)
OV
-AV
C B
BD
DC
/DC
boo
st
p (t)Pmpp(t)A(t)
pv
A(t)=3x100 Ws
0 0.5 1 1.5 2 2.5 30
50
100
150
Thoi gian (s)
CV
-AV
C B
BD
DC
/DC
boo
st
p (t)Pmpp(t)A(t)
A(t)=3x127.4 Wspv
0 0.5 1 1.5 2 2.5 30
50
100
150
Thoi gian (s)
Tem
p-A
VC
BB
D D
C/D
C b
oost
p (t)Pmpp(t)A(t)
A(t)=3x135.4 Ws
pv
0 0.5 1 1.5 2 2.5 30
50
100
150
Thoi gian (s)
P&
O B
BD
DC
/DC
boo
st
p (t)data2data3
A(t)=3x131 Wspv
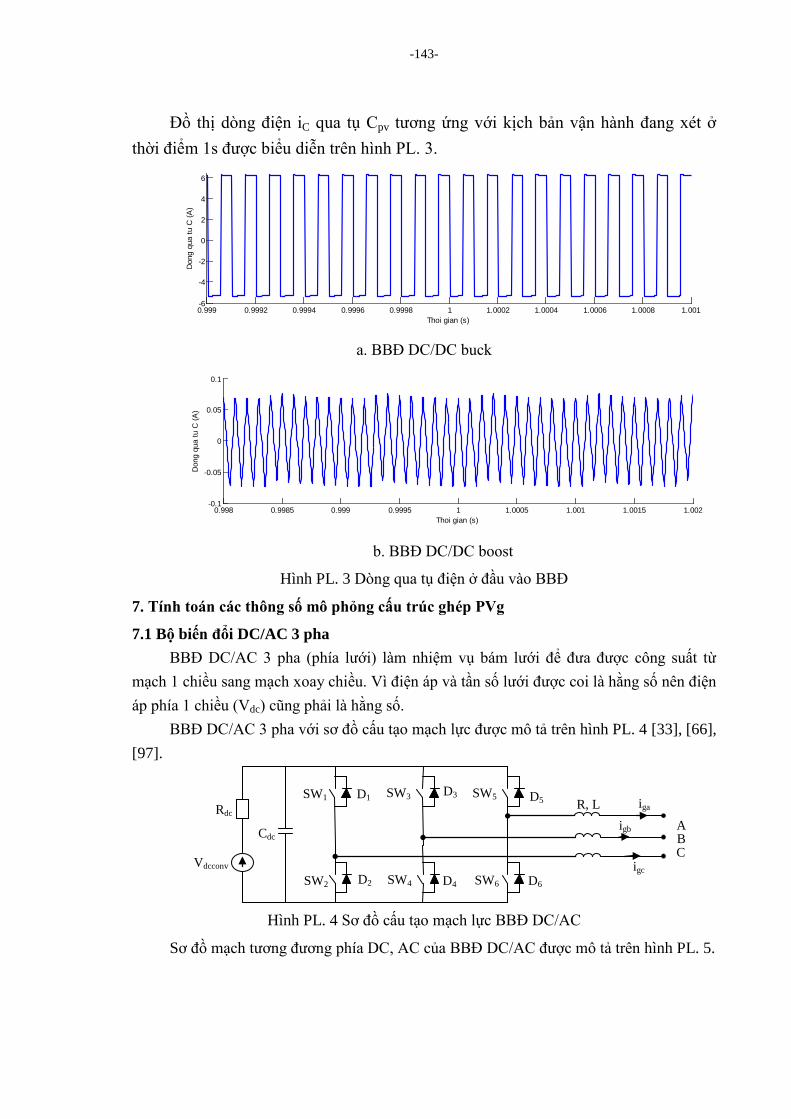
-143-
Đồ thị dòng điện iC qua tụ Cpv tương ứng với kịch bản vận hành đang xét ở thời điểm 1s được biểu diễn trên hình PL. 3.
a. BBĐ DC/DC buck
b. BBĐ DC/DC boost
Hình PL. 3 Dòng qua tụ điện ở đầu vào BBĐ
7. Tính toán các thông số mô phỏng cấu trúc ghép PVg
7.1 Bộ biến đổi DC/AC 3 pha BBĐ DC/AC 3 pha (phía lưới) làm nhiệm vụ bám lưới để đưa được công suất từ
mạch 1 chiều sang mạch xoay chiều. Vì điện áp và tần số lưới được coi là hằng số nên điện áp phía 1 chiều (Vdc) cũng phải là hằng số.
BBĐ DC/AC 3 pha với sơ đồ cấu tạo mạch lực được mô tả trên hình PL. 4 [33], [66], [97].
Hình PL. 4 Sơ đồ cấu tạo mạch lực BBĐ DC/AC
Sơ đồ mạch tương đương phía DC, AC của BBĐ DC/AC được mô tả trên hình PL. 5.
0.999 0.9992 0.9994 0.9996 0.9998 1 1.0002 1.0004 1.0006 1.0008 1.001-6
-4
-2
0
2
4
6
Thoi gian (s)
Don
g qu
a tu
C (A
)
0.998 0.9985 0.999 0.9995 1 1.0005 1.001 1.0015 1.002-0.1
-0.05
0
0.05
0.1
Thoi gian (s)
Don
g qu
a tu
C (A
)
iga
igb
igc
SW3 D5 SW1 D1 SW5 D3
Cdc
SW2 SW4 SW6
R, L
D2 D4 D6
A B C Vdcconv
Rdc
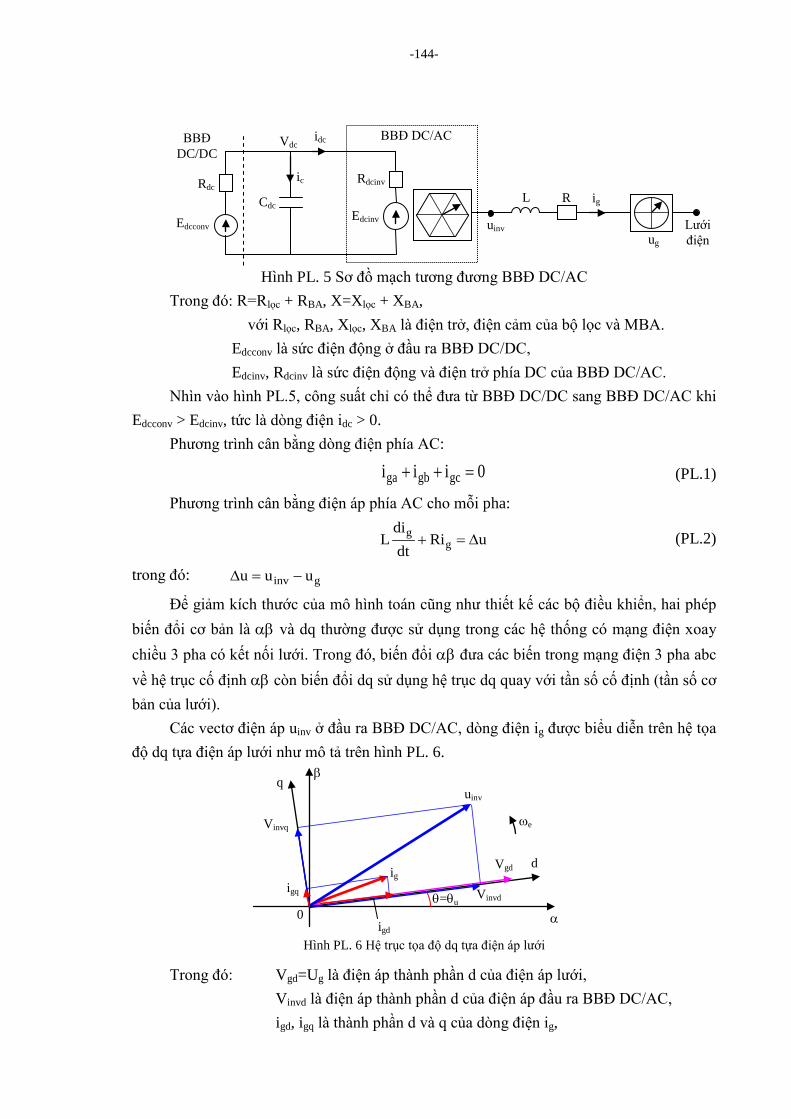
-144-
Hình PL. 5 Sơ đồ mạch tương đương BBĐ DC/AC Trong đó: R=Rlọc + RBA, X=Xlọc + XBA,
với Rlọc, RBA, Xlọc, XBA là điện trở, điện cảm của bộ lọc và MBA. Edcconv là sức điện động ở đầu ra BBĐ DC/DC, Edcinv, Rdcinv là sức điện động và điện trở phía DC của BBĐ DC/AC. Nhìn vào hình PL.5, công suất chỉ có thể đưa từ BBĐ DC/DC sang BBĐ DC/AC khi
Edcconv > Edcinv, tức là dòng điện idc > 0. Phương trình cân bằng dòng điện phía AC:
0iii gcgbga =++ (PL.1)
Phương trình cân bằng điện áp phía AC cho mỗi pha:
uRidt
diL g
g ∆=+ (PL.2)
trong đó: ginv uuu −=∆
Để giảm kích thước của mô hình toán cũng như thiết kế các bộ điều khiển, hai phép biến đổi cơ bản là αβ và dq thường được sử dụng trong các hệ thống có mạng điện xoay chiều 3 pha có kết nối lưới. Trong đó, biến đổi αβ đưa các biến trong mạng điện 3 pha abc về hệ trục cố định αβ còn biến đổi dq sử dụng hệ trục dq quay với tần số cố định (tần số cơ bản của lưới).
Các vectơ điện áp uinv ở đầu ra BBĐ DC/AC, dòng điện ig được biểu diễn trên hệ tọa độ dq tựa điện áp lưới như mô tả trên hình PL. 6.
Hình PL. 6 Hệ trục tọa độ dq tựa điện áp lưới
Trong đó: Vgd=Ug là điện áp thành phần d của điện áp lưới, Vinvd là điện áp thành phần d của điện áp đầu ra BBĐ DC/AC, igd, igq là thành phần d và q của dòng điện ig,
uinv
ωe
α
d
q
Vinvd θ=θu
β
Vinvq
igd
igq
0
Vgd ig
R
Rdc
Cdc Edcinv
L ig
ug
ic
idc Vdc
Edcconv
BBĐ DC/DC
Lưới điện
BBĐ DC/AC
uinv
Rdcinv

-145-
ugq=0, ωe = dθ/dt. Áp dụng công thức chuyển hệ trục tọa độ Park từ hệ trục 3 pha abc sang hệ trục quay
dq tựa điện áp lưới cho biến dòng điện ig và điện áp ∆u có:
d ga e gb e gc e2 2 2i i cos( t) i cos t i cos t3 3 3 π π = ω + ω − + ω +
(PL.3)
q ga e gb e gc e2 2 2i i sin( t) i sin t i sin t3 3 3 π π = − ω + ω − + ω +
(PL.4)
d a e b e b e2 2 2V u cos( t) u cos t u cos t3 3 3 π π ∆ = ∆ ω + ∆ ω − + ∆ ω +
(PL.5)
q a e b e b e2 2 2V u sin( t) u sin t u sin t3 3 3 π π ∆ = − ∆ ω + ∆ ω − + ∆ ω +
(PL.6)
trong đó: ∆ua, ∆ub, ∆uc là độ lệch điện áp tương ứng của các pha A, B, C. Đạo hàm hai vế (PL.3) theo t:
ga gb gcde e e
e ga e gb e gc e
di di didi 2 2 2cos( t) cos t cos tdt 3 dt dt 3 dt 3
2 2 2i sin( t) i sin t i sin t3 3 3
π π = ω + ω − + ω +
π π − ω ω + ω − + ω +
(PL.7)
Từ (PL.2) ta có:
−∆=
−∆=
−∆=
gccgc
gbbgb
gaaga
iLRu
L1
dtdi
iLRu
L1
dtdi
iLRu
L1
dtdi
(PL.8)
Sử dụng (PL.3), (PL.4), (PL.5), (PL.6) và hệ phương trình (PL.8) được viết lại theo hệ tọa độ dq:
de q d d
di R 1i i Vdt L L
= ω − + ∆ (PL.9)
qe d q q
di R 1i i Vdt L L
= −ω − + ∆ (PL.10)
Từ (PL.9) và (PL.10) ta có mô hình đối tượng điều khiển trên miền toán tử Laplace như mô tả trên hình PL.7.
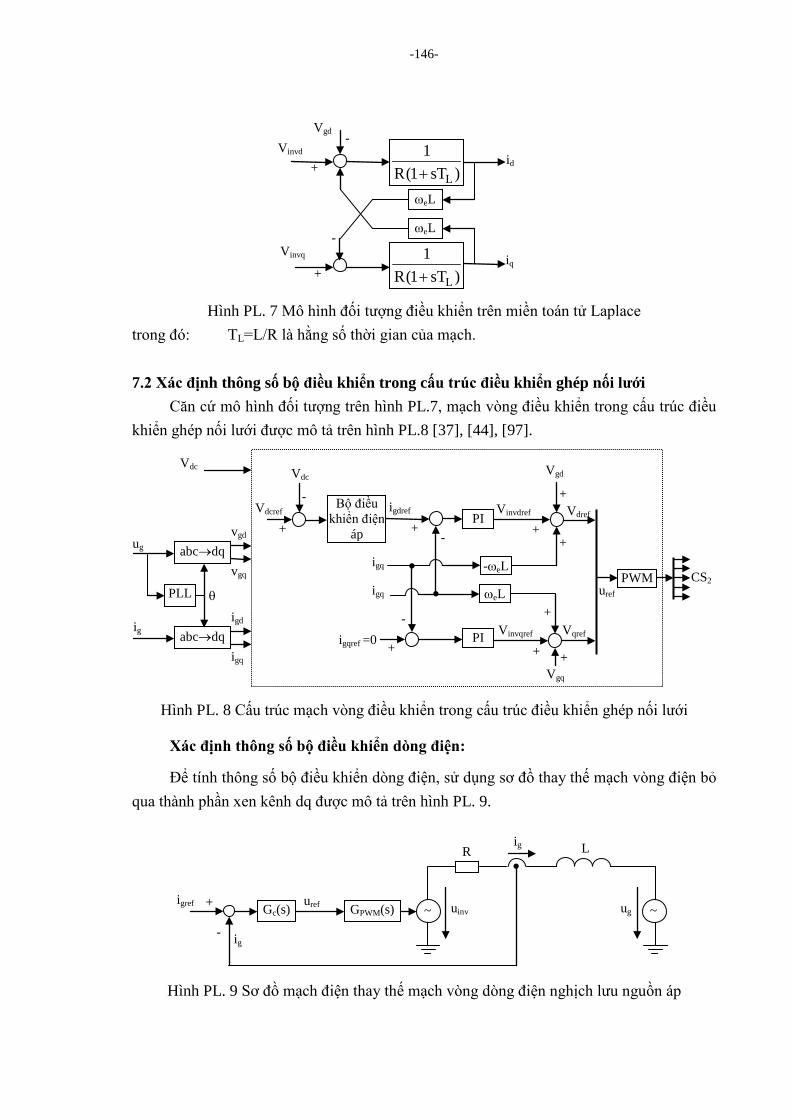
-146-
Hình PL. 7 Mô hình đối tượng điều khiển trên miền toán tử Laplace trong đó: TL=L/R là hằng số thời gian của mạch. 7.2 Xác định thông số bộ điều khiển trong cấu trúc điều khiển ghép nối lưới
Căn cứ mô hình đối tượng trên hình PL.7, mạch vòng điều khiển trong cấu trúc điều khiển ghép nối lưới được mô tả trên hình PL.8 [37], [44], [97].
Hình PL. 8 Cấu trúc mạch vòng điều khiển trong cấu trúc điều khiển ghép nối lưới
Xác định thông số bộ điều khiển dòng điện:
Để tính thông số bộ điều khiển dòng điện, sử dụng sơ đồ thay thế mạch vòng điện bỏ qua thành phần xen kênh dq được mô tả trên hình PL. 9.
Hình PL. 9 Sơ đồ mạch điện thay thế mạch vòng dòng điện nghịch lưu nguồn áp
igref +
-
Gc(s) uref ~ ~ uinv ug
R L ig
GPWM(s)
ig
id
L
1R(1 sT )+
-
ωeL
Vinvd
Vgd
+
Vinvq
+
ωeL
L
1R(1 sT )+
iq
-
CS2
Vdcref -
+
Vdc
Bộ điều khiển điện
áp + -
igdref
-ωeL igq
ωeL
Vqref PI +
igqref =0 -
+
igq
PI Vinvdref
+ +
Vgd
+
Vinvqref
Vdref
PWM
+
Vgq
+
abc→dq ug
PLL
ig
θ
abc→dq
vgd
vgq
igd
igq
Vdc
uref

-147-
Hàm truyền mô tả mối quan hệ giữa dòng điện và độ lệch điện áp ở đầu ra BBĐ
DC/AC dưới dạng toán tử Laplace được xác định bởi (PL.10) [33], [97]:
gid
inv g
i (s)G (s)
u (s) u (s)=
− (PL.10)
Viết lại (PL.10) dưới dạng toán tử Laplace:
gid
g g
i (s)G (s)
Ri sLi=
+ idL
1G (s)R(1 sT )
⇔ =+
(PL.11)
Mạch vòng điều khiển dòng điện được mô tả toán học như trên hình PL.10 (tổng quát
cho cả thành phần dòng id, iq) [37].
Hình PL.10 Mô tả toán học mạch vòng điều khiển dòng điện Hàm truyền hệ hở của mạch vòng dòng điện được xác định theo (PL.12):
ih ci PWM id fiG (s) G G G G=( )( )ih ci
L S
1/ RG (s) G1 sT 1 sT
⇔ =+ +
(PL.12)
Bộ điều khiển Gci cho mạch vòng dòng điện được xác định bởi (PL.13) [9]:
iici ip
KG (s) Ks
= + (PL.13)
trong đó: ipS
LK ,2T
= iiS
RK2T
=
Xác định thông số bộ điều khiển điện áp: Viết phương trình Kirchhoff 1 ở phía DC của BBĐ DC/AC trong mô hình tín hiệu
nhỏ [33], [97]:
dc dcdc dc
tdc
dv vC idt R
= −
c tdc dcdc
tdc
v (1 s.R C )iR
+⇔ =
(PL.14)
trong đó: Rtdc là điện trở tải tương đương ở phía DCbus. Cân bằng công suất đầu vào một chiều và công suất đầu ra phía xoay chiều:
g g dc dc3U i v i=
⇔ g g g g dc dc dc dc dc dc dc dc3I U 3i U V I V i v I v i+ = + + +
(PL.15)
trong đó: Giá trị ổn định g g dc dc3I U V I= , thành phần dcdc i~v~ rất nhỏ có thể bỏ qua.
Thế (PL.14) vào (PL.15) ta có (PL.16):
igref +
-
Gci(s)
ig
d ig GPWM(s) Gid(s)
Gfi(s)
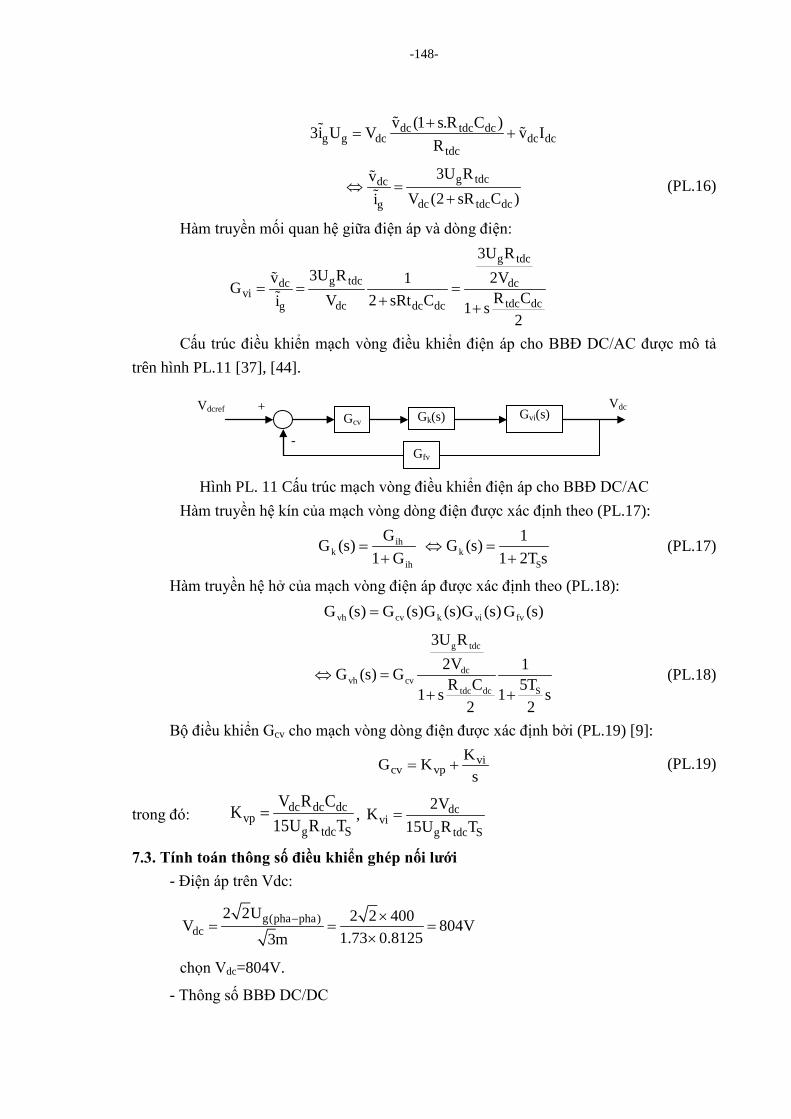
-148-
dc tdc dcg g dc dc dc
tdc
v (1 s.R C )3i U V v IR+
= +
g tdcdc
dc tdc dcg
3U RvV (2 sR C )i
⇔ =+
(PL.16)
Hàm truyền mối quan hệ giữa điện áp và dòng điện:
g tdc
g tdcdc dcvi
tdc dcdc dc dcg
3U R3U Rv 2V1G R CV 2 sRt Ci 1 s
2
= = =+ +
Cấu trúc điều khiển mạch vòng điều khiển điện áp cho BBĐ DC/AC được mô tả trên hình PL.11 [37], [44].
Hình PL. 11 Cấu trúc mạch vòng điều khiển điện áp cho BBĐ DC/AC Hàm truyền hệ kín của mạch vòng dòng điện được xác định theo (PL.17):
ihk
ih
GG (s)1 G
=+
kS
1G (s)1 2T s
⇔ =+
(PL.17)
Hàm truyền hệ hở của mạch vòng điện áp được xác định theo (PL.18): vh cv k vi fvG (s) G (s)G (s)G (s)G (s)=
g tdc
dcvh cv
tdc dc S
3U R2V 1G (s) G R C 5T1 s 1 s
2 2
⇔ =+ +
(PL.18)
Bộ điều khiển Gcv cho mạch vòng dòng điện được xác định bởi (PL.19) [9]:
vicv vp
KG Ks
= + (PL.19)
trong đó: dc dc dcvp
g tdc S
V R CK15U R T
= , dcvi
g tdc S
2VK15U R T
=
7.3. Tính toán thông số điều khiển ghép nối lưới - Điện áp trên Vdc:
g(pha pha)dc
2 2U 2 2 400V 804V1.73 0.81253m
− ×= = =
×
chọn Vdc=804V.
- Thông số BBĐ DC/DC
+
-
Vdcref Gcv
Gk(s) Gvi(s)
Vdc
Gfv

-149-
4pv 2
2 39.6 0.001C 6 10 F363
−× ×≥ = ×
dc804L 0.015H
109.27 0.001 50000≥ =
× × 3C
dc 2 2dc
2Q 2 39.6 30C 3.7 10 FV 804
−× ×≥ = = ×
Chọn Cpv=1 mF, Ldc=0.02 H, Rdc=0.1 Ω, Cdc= 5mF.
- Tính toán thông số bộ điều khiển DC/AC
Tham số của mạch phía xoay chiều của BBĐ DC/AC:
fS=50 kHz → TS=2.10-5
Bộ lọc: Rlọc=0.0001 Ω, Llọc=4.5 x 10-4 H
Máy biến áp: RBA = 0.00019 Ω, LBA = 8.84 x 10-4H, công suất định mức 40 kVA
Tính trong hệ đơn vị cơ bản trên mỗi đơn vị công suất:
6BABA(pu)
dm dcb
R 0.00019R 1.2 10P Z 40 3.98
−= = = ××
44BA
BA(pu)dm cb
L 8.84 10L 0.06 10P L 40 3.58
−−×
= = = ××
+ Tính chọn tham số bộ điều khiển dòng điện
Giá trị các đại lượng trong hệ đơn vị tương đối định mức:
cb dm2 2S S 40 26.7 kVA3 3
= = =
dcb qcb gdm2 2V V U 400 326V3 3
= = = =
cbdcb qcb
dcb
S 26700I I 81.9AV 326
= = = =
dcbdcb qcb
dcb
V 326Z Z 3.98I 81.9
= = = = Ω
cb dcbL Z 3.98H rad / s= = × 4
4BA locpu
cb
L L (8.84 4.5) 10L 3.335 10 pu s / radL 3.98
−−+ + ×
= = = × ×
45BA loc
pudcb
R R (1.9 1) 10R 7.28 10 puZ 3.98
−−+ + ×
= = = ×
5
ii 5S
R 7.3 10K 1.8252T 2 2 10
−
−×
= = =× ×
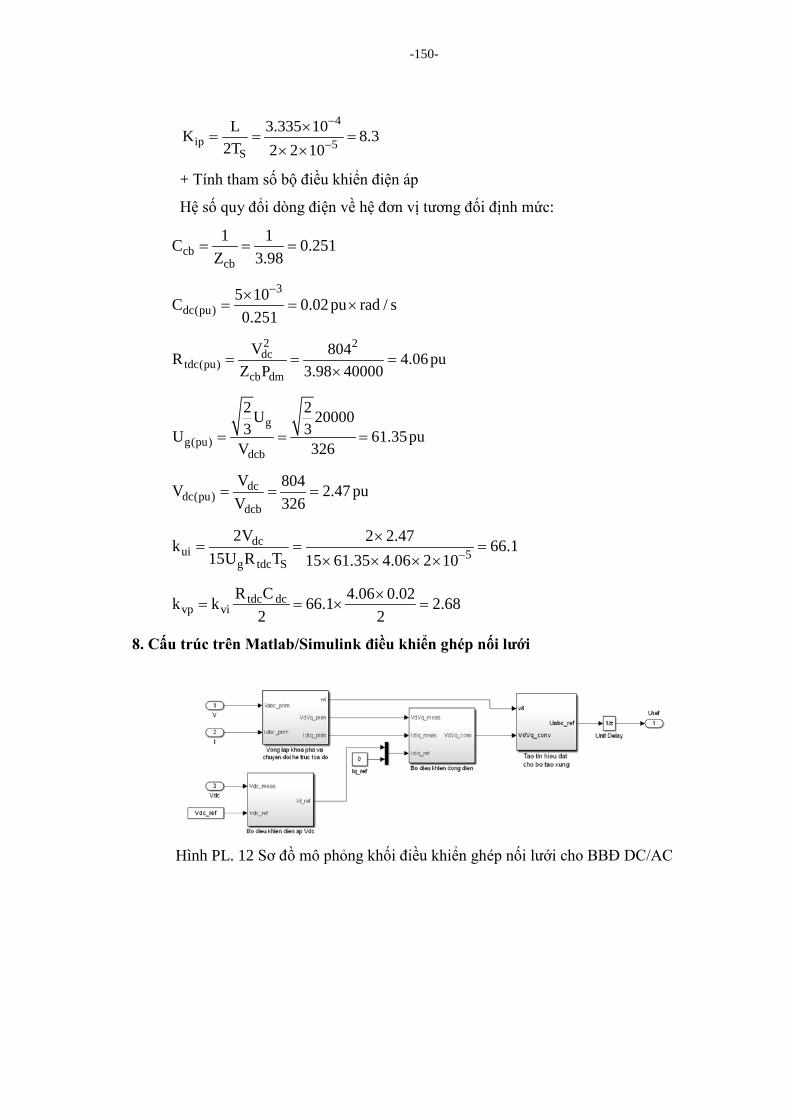
-150-
4
ip 5S
L 3.335 10K 8.32T 2 2 10
−
−×
= = =× ×
+ Tính tham số bộ điều khiển điện áp
Hệ số quy đổi dòng điện về hệ đơn vị tương đối định mức:
cbcb
1 1C 0.251Z 3.98
= = =
3
dc(pu)5 10C 0.02pu rad / s0.251
−×= = ×
2 2dc
tdc(pu)cb dm
V 804R 4.06puZ P 3.98 40000
= = =×
g
g(pu)dcb
2 2U 200003 3U 61.35pu
V 326= = =
dcdc(pu)
dcb
V 804V 2.47 puV 326
= = =
dcui 5
g tdc S
2V 2 2.47k 66.115U R T 15 61.35 4.06 2 10−
×= = =
× × × ×
tdc dcvp vi
R C 4.06 0.02k k 66.1 2.682 2
×= = × =
8. Cấu trúc trên Matlab/Simulink điều khiển ghép nối lưới
Hình PL. 12 Sơ đồ mô phỏng khối điều khiển ghép nối lưới cho BBĐ DC/AC
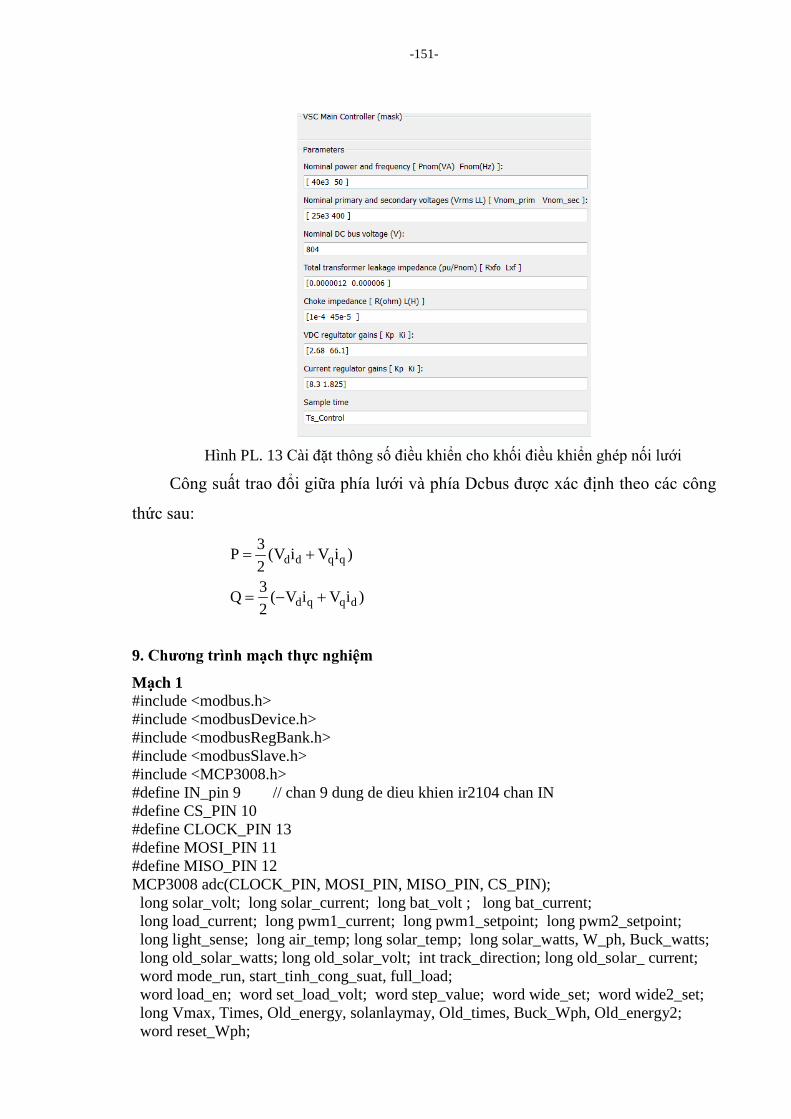
-151-
Hình PL. 13 Cài đặt thông số điều khiển cho khối điều khiển ghép nối lưới
Công suất trao đổi giữa phía lưới và phía Dcbus được xác định theo các công
thức sau:
d d q q
d q q d
3P (V i V i )23Q ( V i V i )2
= +
= − +
9. Chương trình mạch thực nghiệm
Mạch 1 #include <modbus.h> #include <modbusDevice.h> #include <modbusRegBank.h> #include <modbusSlave.h> #include <MCP3008.h> #define IN_pin 9 // chan 9 dung de dieu khien ir2104 chan IN #define CS_PIN 10 #define CLOCK_PIN 13 #define MOSI_PIN 11 #define MISO_PIN 12 MCP3008 adc(CLOCK_PIN, MOSI_PIN, MISO_PIN, CS_PIN); long solar_volt; long solar_current; long bat_volt ; long bat_current; long load_current; long pwm1_current; long pwm1_setpoint; long pwm2_setpoint; long light_sense; long air_temp; long solar_temp; long solar_watts, W_ph, Buck_watts; long old_solar_watts; long old_solar_volt; int track_direction; long old_solar_ current; word mode_run, start_tinh_cong_suat, full_load; word load_en; word set_load_volt; word step_value; word wide_set; word wide2_set; long Vmax, Times, Old_energy, solanlaymay, Old_times, Buck_Wph, Old_energy2; word reset_Wph;
-152-
enum charger_state off,startup,mppt_track charger_state; modbusDevice regBank; modbusSlave slave; void setup() regBank.setId(10); regBank.add(10003); regBank.add(10004); regBank.add(30001); regBank.add(30002); regBank.add(30003); regBank.add(30004); regBank.add(30005); regBank.add(30006); regBank.add(30007); regBank.add(30008); regBank.add(30009); regBank.add(30010); regBank.add(30011); regBank.add(30012); regBank.add(30013); regBank.add(30015); regBank.add(30016); regBank.add(40010); regBank.add(40011); regBank.add(40012); regBank.add(40013); regBank.add(40014); regBank.add(40015); regBank.add(40016); regBank.add(40017); regBank.add(40018); regBank.add(40019); slave._device = ®Bank; slave.setBaud(9600); track_direction = 1; TCCR1B = (TCCR1B & 0b11111000) | B00000001; void loop() read_sensors(); modbus_232(); run_charger(); run_load(); tinh_cong_suat(); full_load_en(); void read_sensors() int sample1=0; int sample2=0; int sample3=0; int sample4=0; int sample5=0; int sample7=0; int sample8=0; int sample9=0; for(int i=0;i<10;i++)sample1 += analogRead(A0); sample2 += analogRead(A1); sample3 += analogRead(A2); sample4 += analogRead(A3); sample5 += analogRead(A6); sample7 += adc.readADC(2); sample8 += adc.readADC(3); sample9 += adc.readADC(4); delayMicroseconds(10); solar_volt = sample1/0.2749982451; solar_current = abs((sample2-5135)/0.36472); bat_volt = sample3 /0.2702540941; load_current = abs((sample4-5145)/0.376); bat_current = abs((sample5-5130)*2.7660577718); light_sense = sample7 * 1; air_temp = sample8 * 50/1024; solar_watts = (solar_current * solar_volt)/1000 ; Buck_watts=(bat_current * bat_volt)/ 1000; Vmax =(18.58575-0.00743 * solar_temp)*10; void modbus_232() // function truyen thong 232 regBank.set(30001, (word) solar_volt/100); regBank.set(30002, (word) solar_current/100); regBank.set(30003, (word) bat_volt/100); regBank.set(30004, (word) load_current/100); regBank.set(30005, (word) pwm1_setpoint); regBank.set(30006, (word) pwm2_setpoint); regBank.set(30007, (word) light_sense); regBank.set(30008, (word) air_temp); regBank.set(30010, (word) solar_watts/100); regBank.set(30011, (word) bat_current/100); regBank.set(30012, (word) W_ph); regBank.set(30013, (word) Vmax); regBank.set(30015, (word) (Buck_watts / 100)); regBank.set(30016, (word) Buck_Wph); mode_run = regBank.get(40010); step_value = regBank.get(40011); wide_set = regBank.get(40012); wide2_set = regBank.get(40013); load_en = regBank.get (40014); set_load_volt = regBank.get (40015); solar_temp = regBank.get (40016); start_tinh_cong_suat = regBank.get (40017); full_load = regBank.get (40018); reset_Wph = regBank.get (40019); void run_charger() if ((mode_run == 0) || (bat_volt > 14000))
-153-
pwm1_setpoint =0; digitalWrite(9,LOW); if ((mode_run == 1) && (bat_volt < 13800) && (solar_volt > bat_volt + 1000)) if ((solar_volt > 18400) && (pwm1_setpoint < 250) && (solar_current <3200)) pwm1_setpoint = pwm1_setpoint + 1; if ((solar_volt < 18400) && (pwm1_setpoint > 15)) pwm1_setpoint = pwm1_setpoint - 1; analogWrite(9, pwm1_setpoint); delayMicroseconds(10); if ((mode_run == 2) && (bat_volt < 13800) && (solar_volt > bat_volt + 1000)) if ((solar_volt > Vmax*100) && (pwm1_setpoint < 250) && (solar_current <3200)) pwm1_setpoint = pwm1_setpoint + 1; if ((solar_volt < Vmax*100) && (pwm1_setpoint > 15)) pwm1_setpoint = pwm1_setpoint - 1; analogWrite(9, pwm1_setpoint); delayMicroseconds(10);
old_solar_watts = solar_watts; if((mode_run == 3) && (bat_volt < 13800) && (solar_volt > bat_volt + 2000)) if ((solar_watts > old_solar_watts) && (pwm1_setpoint < 250) && (solar_current <3200)) if (solar_volt > old_solar_volt) pwm1_setpoint = pwm1_setpoint + step_value; if (solar_volt < old_solar_volt) pwm1_setpoint = pwm1_setpoint - step_value; if ((solar_watts < old_solar_watts) && (pwm1_setpoint >15)) if (solar_volt > old_solar_volt) pwm1_setpoint = pwm1_setpoint + step_value; if (solar_volt < old_solar_volt) pwm1_setpoint = pwm1_setpoint - step_value; pwm1_setpoint = pwm1_setpoint - step_value; analogWrite(9, pwm1_setpoint); delayMicroseconds(10); old_solar_watts = solar_watts; if((mode_run == 4) && (bat_volt <= 13600) && (solar_volt > bat_volt + 2000)) if ((solar_watts >= old_solar_watts) && (pwm1_setpoint < 250) && (solar_current <3200)) pwm1_setpoint = pwm1_setpoint + step_value; if ((solar_watts < old_solar_watts) && (pwm1_setpoint >15)) pwm1_setpoint = pwm1_setpoint - step_value; analogWrite(9, pwm1_setpoint); old_solar_watts = solar_watts; if((mode_run == 4) && (bat_volt >= 13600) && (bat_volt <= 13850) && (solar_volt > bat_volt + 2000)) if ((solar_watts >= old_solar_watts) && (pwm1_setpoint < 250) && (solar_current < 186800-13.5*solar_volt ) && (solar_volt >= old_solar_volt)) pwm1_setpoint = pwm1_setpoint + step_value; if ((solar_watts < old_solar_watts) && (pwm1_setpoint >15) && (solar_current > 186800-13.5*solar_volt) && (solar_volt <= old_solar_volt)) pwm1_setpoint = pwm1_setpoint - step_value; analogWrite(9, pwm1_setpoint); old_solar_watts = solar_watts; void run_load() if (load_en == 0) pwm2_setpoint =0; digitalWrite(6,LOW); if (load_en == 1) if ((bat_volt > set_load_volt) && (pwm2_setpoint < 250) && (load_current < 5000)) pwm2_setpoint = pwm2_setpoint + 1; if (((bat_volt < set_load_volt) && (pwm2_setpoint >10)) || (load_current >= 5000)) pwm2_setpoint = pwm2_setpoint - 1; analogWrite(6, pwm2_setpoint); void tinh_cong_suat() Times = millis(); if (start_tinh_cong_suat ==1)
-154-
Old_energy = Old_energy + solar_watts*(Times - Old_times)/60000; W_ph= Old_energy/100; Old_times = Times; if (reset_Wph ==1) Old_energy = 0; void full_load_en() if (load_en == 1) if (full_load ==1 )analogWrite(6, 250); Mạch 2 #include <modbus.h> #include <modbusDevice.h> #include <modbusRegBank.h> #include <modbusSlave.h> #include <MCP3008.h> #include <avr/pgmspace.h> #define IN_pin 9 #define CS_PIN 10 #define CLOCK_PIN 13 #define MOSI_PIN 11 #define MISO_PIN 12 MCP3008 adc(CLOCK_PIN, MOSI_PIN, MISO_PIN, CS_PIN); MCP3008 long solar_volt; long solar_current; long bat_volt ; long bat_current; long load_current; long pwm1_current; long pwm1_setpoint; long pwm2_setpoint; long light_sense; long air_temp; long solar_temp; long solar_watts, W_ph, Buck_watts; long old_solar_watts; long old_solar_ current; int track_direction; word mode_run, start_tinh_cong_suat, full_load; word load_en; word set_load_volt; word step_value; word wide_set; word wide2_set; long Pmax, Vmax, Times, Old_energy, solanlaymau, Old_times, Buck_Wph, Old_energy2; word reset_Wph; const int Solar[] PROGMEM = 100, 200, 300, 400, 500, 600, 700, 800, 900, 1000; const int Pmax20[] PROGMEM = 485, 1030, 1590, 2162, 2740, 3321, 3905, 4491, 5079, 5665; const int Pmax21[] PROGMEM = 480, 1003, 1580, 2152, 2726, 3304, 3886, 4467, 5053, 5636; const int Pmax22[] PROGMEM = 480, 1020, 1574, 2142, 2713, 3287, 3864, 4445, 5025, 5600; const int Pmax23[] PROGMEM = 480, 1018, 1565, 2132, 2700, 3271, 3845, 4421, 5000, 5575; const int Pmax24[] PROGMEM = 480, 1013, 1557, 2124, 2680, 3255, 3825, 4398, 4970, 5537; const int Pmax25[] PROGMEM = 479, 1015, 1559, 2114, 2674, 3237, 3800, 4370, 4940, 5500; const int Pmax26[] PROGMEM = 480, 1009, 1551, 2101, 2656, 3217, 3777, 4340, 4908, 5472; const int Pmax27[] PROGMEM = 473, 1007, 1545, 2091, 2645, 3200, 3758, 4321, 4882, 5444; const int Pmax28[] PROGMEM = 476, 1004, 1539, 2084, 2632, 3185, 3742, 4298, 4858, 5417; const int Pmax29[] PROGMEM = 470, 1000, 1535, 2075, 2622, 3174, 3727, 4280, 4835, 5390; const int Pmax30[] PROGMEM = 473, 999, 1528, 2068, 2612, 3159, 3709, 4261, 4815, 5368; const int Pmax31[] PROGMEM = 472, 994, 1523, 2057, 2598, 3145, 3693, 4242, 4792, 5343; const int Pmax32[] PROGMEM = 478, 993, 1517, 2049, 2587, 3130, 3674, 4221, 4769, 5317; const int Pmax33[] PROGMEM = 478, 989, 1510, 2041, 2576, 3116, 3658, 4200, 4745, 5288; const int Pmax34[] PROGMEM = 477, 983, 1503, 2031, 2565, 3100, 3638, 4181, 4721, 5264; const int Pmax35[] PROGMEM = 478, 979, 1499, 2023, 2552, 3086, 3622, 4158, 4696, 5234; const int Pmax36[] PROGMEM = 479, 978, 1494, 2014, 2541, 3070, 3603, 4137, 4673, 5209; const int Pmax37[] PROGMEM = 479, 975, 1487, 2010, 2443, 2950, 3450, 4140, 4670, 5210; const int Pmax38[] PROGMEM = 480, 980, 1490, 2030, 2530, 3050, 3580, 4120, 4650, 5180; const int Pmax39[] PROGMEM = 478, 969, 1475, 1987, 2506, 3028, 3570, 4100, 4630, 5160; const int Pmax40[] PROGMEM = 476, 968, 1370, 1980, 2494, 3013, 3533, 4056, 4579, 5130; const int Pmax41[] PROGMEM = 478, 963, 1461, 1969, 2483, 2999, 3517, 4036, 4556, 5100; const int Pmax42[] PROGMEM = 478, 963, 1458, 1963, 2472, 2984, 3499, 4017, 4533, 5080; const int Pmax43[] PROGMEM = 473, 959, 1451, 1955, 2461, 2971, 3483, 3996, 4510, 5050; const int Pmax44[] PROGMEM = 470, 960, 1450, 1950, 2460, 2970, 3480, 4000, 4510, 5030;
-155-
const int Pmax45[] PROGMEM = 470, 960, 1450, 1950, 2450, 2960, 3470, 3980, 4490, 5000; const int Pmax46[] PROGMEM = 470, 950, 1440, 1940, 2440, 2940, 3450, 3960, 4470, 4980; const int Pmax47[] PROGMEM = 470, 950, 1430, 1930, 2430, 2930, 3430, 3940, 4450, 4950; const int Pmax48[] PROGMEM = 470, 950, 1430, 1920, 2420, 2920, 3420, 3920, 4420, 4930; const int Pmax49[] PROGMEM = 470, 940, 1430, 1910, 2410, 2900, 3400, 3900, 4400, 4910; const int Pmax50[] PROGMEM = 470, 940, 1420, 1910, 2400, 2896, 3390, 3890, 4380, 4880; const int Pmax51[] PROGMEM = 470, 940, 1410, 1890, 2380, 2880, 3370, 3860, 4360, 4860; const int Pmax52[] PROGMEM = 450, 940, 1390, 1880, 2370, 2860, 3360, 3850, 4340, 4840; const int Pmax53[] PROGMEM = 460, 930, 1390, 1880, 2370, 2850, 3340, 3830, 4320, 4810; const int Pmax54[] PROGMEM = 450, 930, 1390, 1870, 2350, 2840, 3320, 3830, 4320, 4790; const int Pmax55[] PROGMEM = 450, 920, 1380, 1850, 2330, 2820, 3310, 3800, 4280, 4770; const int Pmax56[] PROGMEM = 440, 920, 1380, 1850, 2330, 2820, 3300, 3780, 4270, 4750; const int Pmax57[] PROGMEM = 430, 910, 1370, 1852, 2330, 2810, 3290, 3770, 4250, 4720; const int Pmax58[] PROGMEM = 430, 910, 2370, 1830, 2310, 2790, 3270, 3750, 4230, 4700; const int Pmax59[] PROGMEM = 430, 900, 1370, 1830, 2310, 2790, 3260, 3740, 4210, 4690; const int Pmax60[] PROGMEM = 420, 890, 1370, 1830, 2300, 2775, 3240, 3720, 4200, 4630; const int Pmax61[] PROGMEM = 420, 890, 1370, 1830, 2292, 2767, 3230, 3710, 4184, 4610; const int Pmax62[] PROGMEM = 410, 880, 1360, 1810, 2288, 2750, 3220, 3690, 4160, 4590; const int Pmax63[] PROGMEM = 400, 870, 1360, 1700, 2280, 2740, 3210, 3680, 4150, 4570; const int Pmax64[] PROGMEM = 390, 860, 1350, 1800, 2270, 2730, 3200, 3660, 4130, 4550; const int Pmax65[] PROGMEM = 380, 850, 1350, 1800, 2260, 2720, 3190, 3650, 4110, 4530; const int Pmax66[] PROGMEM = 370, 840, 1350, 1790, 2250, 2710, 3180, 3640, 4100, 4500; const int Pmax67[] PROGMEM = 360, 830, 1350, 1790, 2250, 2710, 3160, 3620, 4090, 4480; const int Pmax68[] PROGMEM = 350, 800, 1340, 1780, 2240, 2700, 3150, 3610, 4070, 4460; const int Pmax69[] PROGMEM = 340, 790, 1340, 1780, 2230, 2690, 3150, 3600, 1060, 4430; const int Pmax70[] PROGMEM = 330, 780, 1340, 1780, 2230, 2680, 3140, 3590, 4000, 4410; const int Pmax71[] PROGMEM = 380, 770, 1340, 1770, 2220, 2670, 3130, 3580, 4030, 4390; const int Pmax72[] PROGMEM = 760, 1330, 1330, 1770, 2220, 2660, 3120, 3570, 4020, 4370; const int Pmax73[] PROGMEM = 750, 1320, 1330, 1750, 2200, 2660, 3100, 3560, 4010, 4350; const int Pmax74[] PROGMEM = 740, 1310, 1330, 1760, 2210, 2650, 3100, 3550, 4000, 4330; const int Pmax75[] PROGMEM = 730, 1300, 1330, 1750, 2190, 2650, 3090, 3540, 3980, 4300; const int Vmax20[] PROGMEM=1673, 1694, 1745, 1717, 1819, 1838, 1853, 1866, 1873,1887; const int Vmax21[] PROGMEM=1662, 1688, 1729, 1761, 1783, 1825, 1840, 1853, 1863, 1877; const int Vmax22[] PROGMEM=1659, 1671, 1700, 1756, 1777, 1817, 1832, 1841, 1853, 1867; const int Vmax23[] PROGMEM=1626, 1659, 1688, 1742, 1763, 1807, 1822, 1835, 1843, 1856; const int Vmax24[] PROGMEM=1600, 1638, 1671, 1739, 1760, 1797, 1812, 1825, 1836, 1853; const int Vmax25[] PROGMEM=1658, 1675, 1696, 1723, 1744, 1796, 1811, 1824, 1835, 1845; const int Vmax26[] PROGMEM=1623, 1691, 1730, 1757, 1778, 1795, 1810, 1819, 1830, 1840; const int Vmax27[] PROGMEM=1662, 1681, 1719, 1746, 1767, 1784, 1798, 1807, 1818, 1828; const int Vmax28[] PROGMEM=1642, 1671, 1708, 1735, 1756, 1772, 1787, 1800, 1806, 1816; const int Vmax29[] PROGMEM=1640, 1656, 1693, 1720, 1740, 1756, 1770, 1782, 1793, 1803; const int Vmax30[] PROGMEM=1628, 1643, 1679, 1705, 1725, 1742, 1755, 1767, 1778, 1787; const int Vmax31[] PROGMEM=1625, 1636, 1672, 1697, 1717, 1726, 1740, 1751, 1762, 1771; const int Vmax32[] PROGMEM=1595, 1620, 1656, 1681, 1701, 1717, 1730, 1740, 1750, 1759; const int Vmax33[] PROGMEM=1584, 1599, 1621, 1654, 1685, 1700, 1714, 1728, 1738, 1750; const int Vmax34[] PROGMEM=1563, 1624, 1652, 1665, 1675, 1689, 1702, 1714, 1724, 1733; const int Vmax35[] PROGMEM=1559, 1619, 1631, 1655, 1674, 1682, 1695, 1707, 1717, 1725; const int Vmax36[] PROGMEM=1542, 1600, 1620, 1644, 1663, 1672, 1685, 1696, 1706, 1715; const int Vmax37[] PROGMEM=1531, 1589, 1618, 1640, 1650, 1766, 1780, 1691, 1700, 1709; const int Vmax38[] PROGMEM=1590, 1561, 1612, 1636, 1645, 1660, 1673, 1684, 1694, 1703; const int Vmax39[] PROGMEM=1514, 1560, 1598, 1622, 1630, 1644, 1657, 1668, 1677, 1686; const int Vmax40[] PROGMEM=1502, 1549, 1692, 1611, 1621, 1635, 1648, 1658, 1668, 1676; const int Vmax41[] PROGMEM=1500, 1559, 1592, 1610, 1617, 1626, 1638, 1648, 1658, 1675; const int Vmax42[] PROGMEM=1520, 1536, 1568, 1590, 1598, 1617, 1630, 1640, 1649, 1658; const int Vmax43[] PROGMEM=1500, 1514, 1550, 1579, 1597, 1611, 1623, 1633, 1643, 1651;
-156-
const int Vmax44[] PROGMEM=1491, 1512, 1543, 1566, 1587, 1601, 1613, 1623, 1633, 1641; const int Vmax45[] PROGMEM=1490, 1511, 1543, 1565, 1580, 1595, 1606, 1617, 1626, 1634; const int Vmax46[] PROGMEM=1473, 1495, 1522, 1559, 1576, 1585, 1597, 1607, 1616, 1624; const int Vmax47[] PROGMEM=1464, 1473, 1503, 1550, 1566, 1578, 1590, 1600, 1609, 1617; const int Vmax48[] PROGMEM=1460, 1476, 1500, 1545, 1558, 1572, 1583, 1593, 1600, 1610; const int Vmax49[] PROGMEM=1460, 1483, 1513, 1535, 1549, 1563, 1574, 1584, 1593, 1600; const int Vmax50[] PROGMEM=1460, 1483, 1513, 1534, 1550, 1551, 1562, 1572, 1580, 1588; const int Vmax51[] PROGMEM=1456, 1468, 1456, 1485, 1520, 1533, 1544, 1554, 1560, 1574; const int Vmax52[] PROGMEM=1380, 1400, 1420, 1470, 1500, 1514, 1539, 1549, 1557, 1565; const int Vmax53[] PROGMEM=1360, 1398, 1417, 1471, 1504, 1517, 1528, 1538, 1449, 1555; const int Vmax54[] PROGMEM=1350, 1394, 1420, 1455, 1486, 1505, 1516, 1530, 1537, 1543; const int Vmax55[] PROGMEM=1340, 1390, 1414, 1433, 1462, 1488, 1513, 1522, 1530, 1534; const int Vmax56[] PROGMEM=1330, 1380, 1416, 1436, 1466, 1495, 1506, 1515, 1523, 1530; const int Vmax57[] PROGMEM=1320, 1370, 1400, 1435, 1466, 1494, 1505, 1514, 1522, 1629; const int Vmax58[] PROGMEM=1320, 1360, 1400, 1418, 1449, 1477, 1487, 1513, 1521, 1528; const int Vmax59[] PROGMEM=1310, 1350, 1398, 1417, 1448, 1476, 1486, 1495, 1503, 1510; const int Vmax60[] PROGMEM=1310, 1350, 1397, 1416, 1447, 1459, 1469, 1494, 1502, 1509; const int Vmax61[] PROGMEM=1300, 1340, 1396, 1415, 1430, 1458, 1468, 1493, 1501, 1508; const int Vmax62[] PROGMEM=1290, 1340, 1390, 1398, 1429, 1457, 1467, 1476, 1484, 1490; const int Vmax63[] PROGMEM=1290, 1340, 1379, 1382, 1428, 1440, 1466, 1474, 1482, 1485; const int Vmax64[] PROGMEM=1290, 1330, 1378, 1381, 1427, 1439, 1465, 1474, 1481, 1483; const int Vmax65[] PROGMEM=1280, 1320, 1370, 1380, 1410, 1422, 1448, 1456, 1463, 1470; const int Vmax66[] PROGMEM=1280, 1320, 1377, 1379, 1409, 1420, 1447, 1455, 1462, 1468; const int Vmax67[] PROGMEM=1280, 1310, 1376, 1378, 1408, 1419, 1429, 1437, 1461, 1465; const int Vmax68[] PROGMEM=1270, 1310, 1375, 1362, 1391, 1419, 1428, 1436, 1444, 1450; const int Vmax69[] PROGMEM=1260, 1300, 1359, 1361, 1390, 1417, 1427, 1435, 1443, 1449; const int Vmax70[] PROGMEM=1250, 1290, 1350, 1360, 1389, 1400, 1426, 1434, 1440, 1445; const int Vmax71[] PROGMEM=1250, 1280, 1350, 1354, 1383, 1394, 1419, 1428, 1435, 1441; const int Vmax72[] PROGMEM=1270, 1340, 1341, 1348, 1377, 1388, 1413, 1421, 1428, 1435; const int Vmax73[] PROGMEM=1260, 1330, 1325, 1332, 1360, 1387, 1396, 1420, 1427, 1433; const int Vmax74[] PROGMEM=1250, 1320, 1320, 1342, 1370, 1381, 1405, 1414, 1420, 1427; const int Vmax75[] PROGMEM=1240, 1310, 1310, 1336, 1349, 1390, 1399, 1407, 1414, 1420; int j,n; enum charger_state off,startup,mppt_track charger_state; modbusDevice regBank;modbusSlave slave; void setup() regBank.setId(12); regBank.add(10003); regBank.add(10004); regBank.add(30001); regBank.add(30002); regBank.add(30003); regBank.add(30004); regBank.add(30005); regBank.add(30006); regBank.add(30007); regBank.add(30008); regBank.add(30009); regBank.add(30010); regBank.add(30011); regBank.add(30012); regBank.add(30013); regBank.add(30014); regBank.add(30015); regBank.add(30016); regBank.add(40010); regBank.add(40011); regBank.add(40012); regBank.add(40013); regBank.add(40014); regBank.add(40015); regBank.add(40017); regBank.add(40018); regBank.add(40019); Serial.begin(9600); slave._device = ®Bank; slave.setBaud(9600); track_direction = 1; TCCR1B = (TCCR1B & 0b11111000) | B00000001; void loop() read_sensors(); modbus_232(); pmax_vmax(); run_charger(); run_load(); tinh_cong_suat(); full_load_en(); void read_sensors() int sample1=0; int sample2=0; int sample3=0; int sample4=0; int sample5=0; int sample7=0; long sample8=0; long sample9=0; for(int i=0;i<10;i++) sample1 += analogRead(A0);

-157-
sample2 += analogRead(A1); sample3 += analogRead(A2); sample4 += analogRead(A3); sample5 += analogRead(A6); sample7 += adc.readADC(2); sample8 += adc.readADC(3); sample9 += adc.readADC(4); delayMicroseconds(10); solar_volt = sample1/0.2749982451; solar_current = abs((sample2-5135)/0.36472); bat_volt = sample3 /0.2702540941; load_current = abs((sample4-5145)/0.376); bat_current = abs((sample5-5190)*2.649574468); light_sense = sample7 / 10.23; air_temp = sample8 *50/1024; solar_temp = sample9 *50/1024; solar_watts=(solar_current*solar_volt)/1000; Buck_watts=(bat_current*bat_volt) /1000; void modbus_232() // function truyen thong 232 regBank.set(30001, (word) (solar_volt/100)); regBank.set(30002, (word) solar_current/100); regBank.set(30003, (word) bat_volt/100); regBank.set(30004, (word) load_current/100); regBank.set(30005, (word) pwm1_setpoint); regBank.set(30006, (word) pwm2_setpoint); regBank.set(30007, (word) light_sense); regBank.set(30008, (word) air_temp * 10); regBank.set(30009, (word) solar_temp); regBank.set(30010, (word) solar_watts/100); regBank.set(30011, (word) bat_current/100); regBank.set(30012, (word) W_ph); regBank.set(30013, (word) (Vmax/10)); regBank.set(30014, (word) (Pmax/10)); regBank.set(30015, (word) (Buck_watts/100)); regBank.set(30016, (word) Buck_Wph); mode_run = regBank.get(40010); step_value = regBank.get(40011); wide_set = regBank.get(40012); wide2_set = regBank.get(40013); load_en = regBank.get (40014); set_load_volt = regBank.get (40015); start_tinh_cong_suat = regBank.get (40017); full_load = regBank.get (40018); reset_Wph = regBank.get (40019); void pmax_vmax() for (n = 0; n < 10; n++) word hh = pgm_read_word(Solar+n); if ((pgm_read_word(Solar+n)<=light_sense) && (pgm_read_word(Solar+n+1)>light_sense)) j=n; if (solar_temp==20)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax20+j+1)-pgm_read_word(Pmax20+j))/100)+pgm_read_word(Pmax20+j)); if (solar_temp==21)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax21+j+1)-pgm_read_word(Pmax21+j))/100)+pgm_read_word(Pmax21+j)); if (solar_temp==22)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax22+j+1)-pgm_read_word(Pmax22+j))/100)+pgm_read_word(Pmax22+j)); if (solar_temp==23)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax23+j+1)-pgm_read_word(Pmax23+j))/100)+pgm_read_word(Pmax23+j)); if (solar_temp==24)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax24+j+1)-pgm_read_word(Pmax24+j))/100)+pgm_read_word(Pmax24+j)); if (solar_temp==25)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax25+j+1)-pgm_read_word(Pmax25+j))/100)+pgm_read_word(Pmax25+j));
-158-
if (solar_temp==26)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax26+j+1)-pgm_read_word(Pmax26+j))/100)+pgm_read_word(Pmax26+j)); if (solar_temp==27)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax27+j+1)-pgm_read_word(Pmax27+j))/100)+pgm_read_word(Pmax27+j)); if (solar_temp==28)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax28+j+1)-pgm_read_word(Pmax28+j))/100)+pgm_read_word(Pmax28+j)); if (solar_temp==29)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax29+j+1)-pgm_read_word(Pmax29+j))/100)+pgm_read_word(Pmax29+j)); if (solar_temp==30)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax30+j+1)-pgm_read_word(Pmax30+j))/100)+pgm_read_word(Pmax30+j)); if (solar_temp==31)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax31+j+1)-pgm_read_word(Pmax31+j))/100)+pgm_read_word(Pmax31+j)); if (solar_temp==32)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax32+j+1)-pgm_read_word(Pmax32+j))/100)+pgm_read_word(Pmax32+j)); if (solar_temp==33)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax33+j+1)-pgm_read_word(Pmax33+j))/100)+pgm_read_word(Pmax33+j)); if (solar_temp==34)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax34+j+1)-pgm_read_word(Pmax34+j))/100)+pgm_read_word(Pmax34+j)); if (solar_temp==35)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax35+j+1)-pgm_read_word(Pmax35+j))/100)+pgm_read_word(Pmax35+j)); if (solar_temp==36)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax36+j+1)-pgm_read_word(Pmax36+j))/100)+pgm_read_word(Pmax36+j)); if (solar_temp==37)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax37+j+1)-pgm_read_word(Pmax37+j))/100)+pgm_read_word(Pmax37+j)); if (solar_temp==38)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax38+j+1)-pgm_read_word(Pmax38+j))/100)+pgm_read_word(Pmax38+j)); if (solar_temp==39)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax39+j+1)-pgm_read_word(Pmax39+j))/100)+pgm_read_word(Pmax39+j)); if (solar_temp==40)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax40+j+1)-pgm_read_word(Pmax40+j))/100)+pgm_read_word(Pmax40+j)); if (solar_temp==41)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax41+j+1)-pgm_read_word(Pmax41+j))/100)+pgm_read_word(Pmax41+j));

-159-
if (solar_temp==42)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax42+j+1)-pgm_read_word(Pmax42+j))/100)+pgm_read_word(Pmax42+j)); if (solar_temp==43)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax43+j+1)-pgm_read_word(Pmax43+j))/100)+pgm_read_word(Pmax43+j)); if (solar_temp==44)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax44+j+1)-pgm_read_word(Pmax44+j))/100)+pgm_read_word(Pmax44+j)); if (solar_temp==45)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax45+j+1)-pgm_read_word(Pmax45+j))/100)+pgm_read_word(Pmax45+j)); if (solar_temp==46)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax46+j+1)-pgm_read_word(Pmax46+j))/100)+pgm_read_word(Pmax46+j)); if (solar_temp==47)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax47+j+1)-pgm_read_word(Pmax47+j))/100)+pgm_read_word(Pmax47+j)); if (solar_temp==48)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax48+j+1)-pgm_read_word(Pmax48+j))/100)+pgm_read_word(Pmax48+j)); if (solar_temp==49)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax49+j+1)-pgm_read_word(Pmax49+j))/100)+pgm_read_word(Pmax49+j)); if (solar_temp==50)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax50+j+1)-pgm_read_word(Pmax50+j))/100)+pgm_read_word(Pmax50+j)); if (solar_temp==51)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax51+j+1)-pgm_read_word(Pmax51+j))/100)+pgm_read_word(Pmax51+j)); if (solar_temp==52)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax52+j+1)-pgm_read_word(Pmax52+j))/100)+pgm_read_word(Pmax52+j)); if (solar_temp==53)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax53+j+1)-pgm_read_word(Pmax53+j))/100)+pgm_read_word(Pmax53+j)); if (solar_temp==54)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax54+j+1)-pgm_read_word(Pmax54+j))/100)+pgm_read_word(Pmax54+j)); if (solar_temp==55)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax55+j+1)-pgm_read_word(Pmax55+j))/100)+pgm_read_word(Pmax55+j)); if (solar_temp==56)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax56+j+1)-pgm_read_word(Pmax56+j))/100)+pgm_read_word(Pmax56+j)); if (solar_temp==57)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax57+j+1)-pgm_read_word(Pmax57+j))/100)+pgm_read_word(Pmax57+j));

-160-
if (solar_temp==58)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax58+j+1)-pgm_read_word(Pmax58+j))/100)+pgm_read_word(Pmax58+j)); if (solar_temp==59)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax59+j+1)-pgm_read_word(Pmax59+j))/100)+pgm_read_word(Pmax59+j)); if (solar_temp==60)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax60+j+1)-pgm_read_word(Pmax60+j))/100)+pgm_read_word(Pmax60+j)); if (solar_temp==61)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax61+j+1)-pgm_read_word(Pmax61+j))/100)+pgm_read_word(Pmax61+j)); if (solar_temp==62)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax62+j+1)-pgm_read_word(Pmax62+j))/100)+pgm_read_word(Pmax62+j)); if (solar_temp==63)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax63+j+1)-pgm_read_word(Pmax63+j))/100)+pgm_read_word(Pmax63+j)); if (solar_temp==64)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax64+j+1)-pgm_read_word(Pmax64+j))/100)+pgm_read_word(Pmax64+j)); if (solar_temp==65)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax65+j+1)-pgm_read_word(Pmax65+j))/100)+pgm_read_word(Pmax65+j)); if (solar_temp==66)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax66+j+1)-pgm_read_word(Pmax66+j))/100)+pgm_read_word(Pmax66+j)); if (solar_temp==67)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax67+j+1)-pgm_read_word(Pmax67+j))/100)+pgm_read_word(Pmax67+j)); if (solar_temp==68)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax68+j+1)-pgm_read_word(Pmax68+j))/100)+pgm_read_word(Pmax68+j)); if (solar_temp==69)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax69+j+1)-pgm_read_word(Pmax69+j))/100)+pgm_read_word(Pmax69+j)); if (solar_temp==70)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax70+j+1)-pgm_read_word(Pmax70+j))/100)+pgm_read_word(Pmax70+j)); if (solar_temp==71)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax71+j+1)-pgm_read_word(Pmax71+j))/100)+pgm_read_word(Pmax71+j)); if (solar_temp==72)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax72+j+1)-pgm_read_word(Pmax72+j))/100)+pgm_read_word(Pmax72+j)); if (solar_temp==73)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax73+j+1)-pgm_read_word(Pmax73+j))/100)+pgm_read_word(Pmax73+j));
-161-
if (solar_temp==74)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax74+j+1)-pgm_read_word(Pmax74+j))/100)+pgm_read_word(Pmax74+j)); if (solar_temp==75)(Pmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Pmax75+j+1)-pgm_read_word(Pmax75+j))/100)+pgm_read_word(Pmax75+j)); if (solar_temp==20)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax20+j+1)-pgm_read_word(Vmax20+j))/100)+pgm_read_word(Vmax20+j)); if (solar_temp==21)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax21+j+1)-pgm_read_word(Vmax21+j))/100)+pgm_read_word(Vmax21+j)); if (solar_temp==22)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax22+j+1)-pgm_read_word(Vmax22+j))/100)+pgm_read_word(Vmax22+j)); if (solar_temp==23)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax23+j+1)-pgm_read_word(Vmax23+j))/100)+pgm_read_word(Vmax23+j)); if (solar_temp==24)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax24+j+1)-pgm_read_word(Vmax24+j))/100)+pgm_read_word(Vmax24+j)); if (solar_temp==25)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax25+j+1)-pgm_read_word(Vmax25+j))/100)+pgm_read_word(Vmax25+j)); if (solar_temp==26)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax26+j+1)-pgm_read_word(Vmax26+j))/100)+pgm_read_word(Vmax26+j)); if (solar_temp==27)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax27+j+1)-pgm_read_word(Vmax27+j))/100)+pgm_read_word(Vmax27+j)); if (solar_temp==28)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax28+j+1)-pgm_read_word(Vmax28+j))/100)+pgm_read_word(Vmax28+j)); if (solar_temp==29)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax29+j+1)-pgm_read_word(Vmax29+j))/100)+pgm_read_word(Vmax29+j)); if (solar_temp==30)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax30+j+1)-pgm_read_word(Vmax30+j))/100)+pgm_read_word(Vmax30+j)); if (solar_temp==31)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax31+j+1)-pgm_read_word(Vmax31+j))/100)+pgm_read_word(Vmax31+j)); if (solar_temp==32)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax32+j+1)-pgm_read_word(Vmax32+j))/100)+pgm_read_word(Vmax32+j)); if (solar_temp==33)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax33+j+1)-pgm_read_word(Vmax33+j))/100)+pgm_read_word(Vmax33+j));
-162-
if (solar_temp==34)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax34+j+1)-pgm_read_word(Vmax34+j))/100)+pgm_read_word(Vmax34+j)); if (solar_temp==35)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax35+j+1)-pgm_read_word(Vmax35+j))/100)+pgm_read_word(Vmax35+j)); if (solar_temp==36)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax36+j+1)-pgm_read_word(Vmax36+j))/100)+pgm_read_word(Vmax36+j)); if (solar_temp==37)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax37+j+1)-pgm_read_word(Vmax37+j))/100)+pgm_read_word(Vmax37+j)); if (solar_temp==38)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax38+j+1)-pgm_read_word(Vmax38+j))/100)+pgm_read_word(Vmax38+j)); if (solar_temp==39)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax39+j+1)-pgm_read_word(Vmax39+j))/100)+pgm_read_word(Vmax39+j)); if (solar_temp==40)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax40+j+1)-pgm_read_word(Vmax40+j))/100)+pgm_read_word(Vmax40+j)); if (solar_temp==41)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax41+j+1)-pgm_read_word(Vmax41+j))/100)+pgm_read_word(Vmax41+j)); if (solar_temp==42)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax42+j+1)-pgm_read_word(Vmax42+j))/100)+pgm_read_word(Vmax42+j)); if (solar_temp==43)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax43+j+1)-pgm_read_word(Vmax43+j))/100)+pgm_read_word(Vmax43+j)); if (solar_temp==44)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax44+j+1)-pgm_read_word(Vmax44+j))/100)+pgm_read_word(Vmax44+j)); if (solar_temp==45)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax45+j+1)-pgm_read_word(Vmax45+j))/100)+pgm_read_word(Vmax45+j)); if (solar_temp==46)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax46+j+1)-pgm_read_word(Vmax46+j))/100)+pgm_read_word(Vmax46+j)); if (solar_temp==47)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax47+j+1)-pgm_read_word(Vmax47+j))/100)+pgm_read_word(Vmax47+j)); if (solar_temp==48)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax48+j+1)-pgm_read_word(Vmax48+j))/100)+pgm_read_word(Vmax48+j)); if (solar_temp==49)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax49+j+1)-pgm_read_word(Vmax49+j))/100)+pgm_read_word(Vmax49+j));
-163-
if (solar_temp==50)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax50+j+1)-pgm_read_word(Vmax50+j))/100)+pgm_read_word(Vmax50+j)); if (solar_temp==51)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax51+j+1)-pgm_read_word(Vmax51+j))/100)+pgm_read_word(Vmax51+j)); if (solar_temp==52)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax52+j+1)-pgm_read_word(Vmax52+j))/100)+pgm_read_word(Vmax52+j)); if (solar_temp==53)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax53+j+1)-pgm_read_word(Vmax53+j))/100)+pgm_read_word(Vmax53+j)); if (solar_temp==54)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax54+j+1)-pgm_read_word(Vmax54+j))/100)+pgm_read_word(Vmax54+j)); if (solar_temp==55)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax55+j+1)-pgm_read_word(Vmax55+j))/100)+pgm_read_word(Vmax55+j)); if (solar_temp==56)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax56+j+1)-pgm_read_word(Vmax56+j))/100)+pgm_read_word(Vmax56+j)); if (solar_temp==57)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax57+j+1)-pgm_read_word(Vmax57+j))/100)+pgm_read_word(Vmax57+j)); if (solar_temp==58)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax58+j+1)-pgm_read_word(Vmax58+j))/100)+pgm_read_word(Vmax58+j)); if (solar_temp==59)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax59+j+1)-pgm_read_word(Vmax59+j))/100)+pgm_read_word(Vmax59+j)); if (solar_temp==60)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax60+j+1)-pgm_read_word(Vmax60+j))/100)+pgm_read_word(Vmax60+j)); if (solar_temp==61)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax61+j+1)-pgm_read_word(Vmax61+j))/100)+pgm_read_word(Vmax61+j)); if (solar_temp==62)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax62+j+1)-pgm_read_word(Vmax62+j))/100)+pgm_read_word(Vmax62+j)); if (solar_temp==63)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax63+j+1)-pgm_read_word(Vmax63+j))/100)+pgm_read_word(Vmax63+j)); if (solar_temp==64)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax64+j+1)-pgm_read_word(Vmax64+j))/100)+pgm_read_word(Vmax64+j)); if (solar_temp==65)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax65+j+1)-pgm_read_word(Vmax65+j))/100)+pgm_read_word(Vmax65+j));
-164-
if (solar_temp==66)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax66+j+1)-pgm_read_word(Vmax66+j))/100)+pgm_read_word(Vmax66+j)); if (solar_temp==67)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax67+j+1)-pgm_read_word(Vmax67+j))/100)+pgm_read_word(Vmax67+j)); if (solar_temp==68)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax68+j+1)-pgm_read_word(Vmax68+j))/100)+pgm_read_word(Vmax68+j)); if (solar_temp==69)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax69+j+1)-pgm_read_word(Vmax69+j))/100)+pgm_read_word(Vmax69+j)); if (solar_temp==70)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax70+j+1)-pgm_read_word(Vmax70+j))/100)+pgm_read_word(Vmax70+j)); if (solar_temp==71)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax71+j+1)-pgm_read_word(Vmax71+j))/100)+pgm_read_word(Vmax71+j)); if (solar_temp==72)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax72+j+1)-pgm_read_word(Vmax72+j))/100)+pgm_read_word(Vmax72+j)); if (solar_temp==73)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax73+j+1)-pgm_read_word(Vmax73+j))/100)+pgm_read_word(Vmax73+j)); if (solar_temp==74)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax74+j+1)-pgm_read_word(Vmax74+j))/100)+pgm_read_word(Vmax74+j)); if (solar_temp==75)(Vmax = ((light_sense-pgm_read_word(Solar+j))*(pgm_read_word(Vmax75+j+1)-pgm_read_word(Vmax75+j))/100)+pgm_read_word(Vmax75+j)); void run_charger() if ((mode_run == 0) || (bat_volt > 14000)) pwm1_setpoint =0; digitalWrite(9,LOW); if ((mode_run == 1) && (bat_volt < 13800) && (solar_volt > bat_volt +1000) && (light_sense>=100)) if ((solar_volt > Vmax*10) && (pwm1_setpoint < 250) && (solar_current <3200)) pwm1_setpoint = pwm1_setpoint + 1; if ((solar_volt < Vmax*10) && (pwm1_setpoint > 15))
pwm1_setpoint = pwm1_setpoint - 1; analogWrite(9, pwm1_setpoint); delayMicroseconds(10);
old_solar_watts = solar_watts; void run_load() if (load_en == 0) pwm2_setpoint =0; digitalWrite(6,LOW); if (load_en == 1) if ((bat_volt >= set_load_volt) && (pwm2_setpoint < 250) && (load_current < 5000)) pwm2_setpoint = pwm2_setpoint + 1; if (((bat_volt < set_load_volt) && (pwm2_setpoint >10)) || (load_current >= 5000)) pwm2_setpoint = pwm2_setpoint - 1; analogWrite(6, pwm2_setpoint);
-165-
void tinh_cong_suat() Times = millis(); if (start_tinh_cong_suat ==1) Old_energy = Old_energy + solar_watts*(Times - Old_times)/60000; W_ph= Old_energy Old_times = Times; if (reset_Wph ==1) Old_energy = 0; void full_load_en() if (load_en == 1) if (full_load ==1 ) analogWrite(6, 250); 10. Sơ đồ đi dây mạch lực và mạch điều khiển của mô hình thiết bị thực
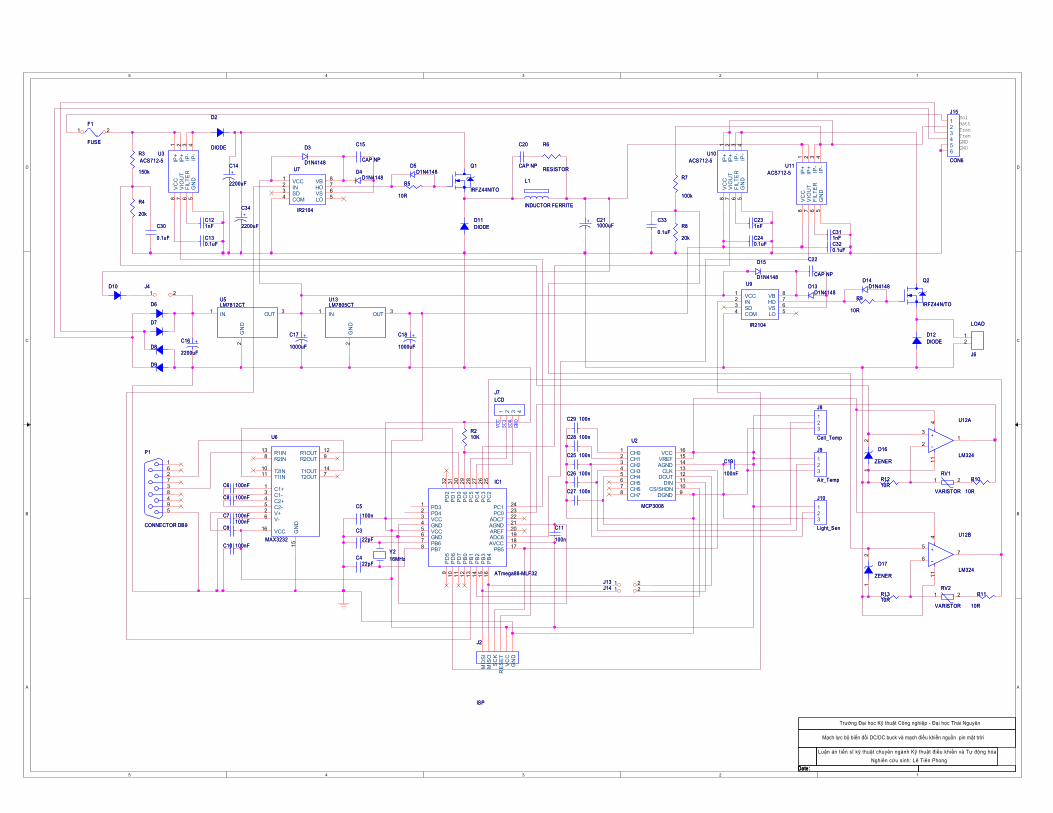
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
Date:Date:
Luận án tiến sĩ kỹ thuật chuyên ngành Kỹ thuật điều khiển và Tự động hóa
Date:
Trường Đại học Kỹ thuật Công nghiệp - Đại học Thái Nguyên
Mạch lực bộ biến đổi DC/DC buck và mạch điều khiển nguồn pin mặt trời
Nghiên cứu sinh: Lê Tiên Phong
SolBattTranTranGNDGND
C30
0.1uF
C30
0.1uF
L1
INDUCTOR FERRITE
L1
INDUCTOR FERRITE
+C17
1000uF
+C17
1000uF
C130.1uFC130.1uF
Y216MHzY216MHz
12
D16
ZENER
D16
ZENER
MO
SI
MIS
OS
CK
RE
SE
TV
CC
GN
D
J2
ISP
J2
ISP
123456
J15
CON6
J15
CON6
D4D1N4148
D4D1N4148
1 2J4J4
C26 100nC26 100n
R1310RR1310R
C33
0.1uF
C33
0.1uF
C20
CAP NP
C20
CAP NP
VCC1IN2SD3COM4
VB 8HO 7VS 6LO 5
U7
IR2104
U7
IR2104
IP+
1IP
+2
IP-
3IP
-4
VC
C8
VIO
UT
7FI
LTE
R6
GN
D5
U3ACS712-5
U3ACS712-5
D5D1N4148
D5D1N4148
D10D10
+C34
2200uF
+C34
2200uF
1 2RV2
VARISTOR
RV2
VARISTOR
C25 100nC25 100n
C28 100nC28 100n
D8D8
D14D1N4148
D14D1N4148
R1210RR1210R
123
J10
Light_Sen
J10
Light_Sen
IN1 OUT 3
GN
D2
U13LM7805CTU13LM7805CT
C5
100n
C5
100n
IN1 OUT 3
GN
D2
U5LM7812CTU5LM7812CT
1 2RV1
VARISTOR
RV1
VARISTOR
+ C211000uF
+ C211000uF
GN
D15
VCC16
R1IN13R2IN8
T2IN10T1IN11
C1+1C1-3C2+4C2-5
R1OUT 12R2OUT 9
T1OUT 14T2OUT 7
V+2V-6
U6
MAX3232
U6
MAX3232
1 2J14J14
5
67
411
+
-
U12B
LM324
+
-
U12B
LM324
+C14
2200uF
+C14
2200uF
12
D17
ZENER
D17
ZENER
R210KR210K
R3
150k
R3
150k
C240.1uFC240.1uF
C311nFC311nF
C10 100nFC10 100nF
R5
10R
R5
10R
C231nFC231nF
R10
10R
R10
10R
VCC 16VREF 15AGND 14
CLK 13DOUT 12
DIN 11CS/SHDN 10
CH01CH12CH23CH34CH45CH56CH67CH78 DGND 9
U2
MCP3008
U2
MCP3008
IP+
1IP
+2
IP-
3IP
-4
VC
C8
VIO
UT
7FI
LTE
R6
GN
D5
U11ACS712-5
U11ACS712-5
C9100nF
C9100nF
C322pF
C322pF
D7D7
R8
20k
R8
20k
R9
10R
R9
10R
C15
CAP NP
C15
CAP NP
PC
629
PD
030
PD
131
PD
232
PD31PD42VCC3GND4
PB67PB78
PD
59
PD
610
PD
711
PB
012
PB
113
PB
214
PB
315
PB
416
PB5 17AVCC 18AREF 20AGND 21
PC0 23PC1 24
PC
225
PC
326
PC
427
PC
528
GND6 VCC5ADC6 19
ADC7 22
IC1
ATmega88-MLF32
IC1
ATmega88-MLF32
123
J9
Air_Temp
J9
Air_Temp
R11
10R
R11
10R
+C16
2200uF
+C16
2200uF
R7
100k
R7
100k
C320.1uFC320.1uF
D13D1N4148
D13D1N4148
+C18
1000uF
+C18
1000uF
R4
20k
R4
20k
D6D6
C121nFC121nF
VCC1IN2SD3COM4
VB 8HO 7VS 6LO 5
U9
IR2104
U9
IR2104
C6 100nFC6 100nF
1 2J13J13
C22
CAP NP
C22
CAP NP
3
21
411
+
-
U12A
LM324
+
-
U12A
LM324
Q1
IRFZ44N/TO
Q1
IRFZ44N/TO
D12DIODED12DIODE
C19
100nF
C19
100nF
D9D9
IP+
1IP
+2
IP-
3IP
-4
VC
C8
VIO
UT
7FI
LTE
R6
GN
D5
U10ACS712-5
U10ACS712-5
D2
DIODE
D2
DIODE D3
D1N4148
D3
D1N4148
C7 100nFC7 100nF
Q2
IRFZ44N/TO
Q2
IRFZ44N/TO
C11
100n
C11
100n
C29 100nC29 100n
C8 100nFC8 100nF
D11DIODED11DIODE
12
J6
LOAD
J6
LOAD
D15
D1N4148
D15
D1N4148
1 2 3 4
VCC
GND
SCl
SDA
J7LCD
VCC
GND
SCl
SDA
J7LCD
C27 100nC27 100n
1 2F1
FUSE
F1
FUSE
C422pF
C422pF
R6
RESISTOR
R6
RESISTOR
123
J8
Cell_Temp
J8
Cell_Temp
594837261
P1
CONNECTOR DB9
P1
CONNECTOR DB9