Feature extraction of metal oxide gas sensors using dynamic moments
8
Sensors and Actuators B 122 (2007) 219–226 Feature extraction of metal oxide gas sensors using dynamic moments Alexander Vergara a , Eduard Llobet a,∗ , Eugenio Martinelli b , Corrado Di Natale b,c , Arnaldo D’Amico b,c , Xavier Correig a a MINOS, Department of Electronic Engineering, Universitat Rovira i Virgili, Avda. Pa¨ ısos Catalans 26, 43007 Tarragona, Spain b Department of Electronic Engineering, University of Rome “Tor Vergata”, Via del Politecnico 1, 00133 Rome, Italy c CNR-IMM, Via del Fosso del Cavaliere, 00133 Rome, Italy Received 30 January 2006; received in revised form 12 May 2006; accepted 22 May 2006 Available online 27 June 2006 Abstract Phase-space methods combined with metal oxide gas sensors are introduced for the first time. The usefulness of the method is assessed by analysing the transient response of metal oxide gas sensors either to a step change in gas concentration or to thermal modulation. The first application considered consists in sorting samples from the headspace of crisps according to their rancidity state. It is shown that using the new dynamic features results in an improvement of rancidity classification: 85.4% instead of the 68.7% reached when standard features are used (G). In the second step, the method is applied to analyse the response of temperature-modulated micro-hotplate sensors. In this case, phase-space methods give the opportunity to use novel features that describe sensor trajectories while adsorption and reaction kinetics are altered by the temperature modulation. Tungsten oxide-based sensors are employed to detect ammonia, nitrogen dioxide and their binary mixtures at different concentrations. Dynamic features are used to build and validate PLS-DA classifiers and good results are obtained, not only ameliorating the gas identification rate (95.6%), but also dramatically reducing the time needed to perform measurements (less than 2% of the response transient is needed to perform the analysis). © 2006 Elsevier B.V. All rights reserved. Keywords: Micro-hotplate metal oxide gas sensors; Dynamic sensor response; Dynamic moments; Phase space; Temperature modulation; Feature extraction 1. Introduction Although metal oxide gas sensors are inexpensive and very sensitive to different toxic species, they suffer from serious shortcomings such as poor selectivity (i.e., sensors are gener- ally responsive to a wide spectrum of gases), low repeatability (i.e., memory effects cause sensor response to depend not only on the species being measured but also on the previous history of the sensor) and response drift (e.g. due to aging of the sensitive layer). Among the different approaches envisaged to fight these drawbacks, modulating the operating temperature of gas sensors has been, in fact, remarkably successful in many applications [1–4]. Temperature modulation alters the kinetics of the adsorp- tion and reaction processes that take place at the sensor surface Based on results presented at the ISOEN 2005, Barcelona, Spain. ∗ Corresponding author. Tel.: +34 977558502; fax: +34 977559605. E-mail address: [email protected] (E. Llobet). while detecting reducing or oxidising species in the presence of atmospheric oxygen. This leads to the development of response patterns, which are characteristic of the species being detected. In other words, by retrieving information from response dynam- ics, new response features are obtained that can confer more selectivity to metal oxide sensors. Indeed, several authors have developed this strategy and applied several techniques to extract features that are important for the discrimination or quantifica- tion of gases. Very often the fast Fourier transform (FFT) and the discrete wavelet transform (DWT) have been used as feature extraction tools [4–9]. Even though the results obtained with temperature modula- tion are very promising, the frequency or frequencies used to modulate the operating temperature of gas sensors had been selected in a non-systematic way by a trial and error procedure. Recently, we introduced a novel method, borrowed from the field of system identification, to systematically choose an opti- mal set of temperature-modulation frequencies. The method, which relies on the use of pseudo-random binary or multi-level sequences, was applied to the identification and quantification 0925-4005/$ – see front matter © 2006 Elsevier B.V. All rights reserved. doi:10.1016/j.snb.2006.05.028
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Feature extraction of metal oxide gas sensors using dynamic moments

A
aadtgmD(a©
K
1
ssa(otl
dh[t
0d
Sensors and Actuators B 122 (2007) 219–226
Feature extraction of metal oxide gas sensors using dynamic moments�
Alexander Vergara a, Eduard Llobet a,∗, Eugenio Martinelli b, Corrado Di Natale b,c,Arnaldo D’Amico b,c, Xavier Correig a
a MINOS, Department of Electronic Engineering, Universitat Rovira i Virgili, Avda. Paısos Catalans 26, 43007 Tarragona, Spainb Department of Electronic Engineering, University of Rome “Tor Vergata”, Via del Politecnico 1, 00133 Rome, Italy
c CNR-IMM, Via del Fosso del Cavaliere, 00133 Rome, Italy
Received 30 January 2006; received in revised form 12 May 2006; accepted 22 May 2006Available online 27 June 2006
bstract
Phase-space methods combined with metal oxide gas sensors are introduced for the first time. The usefulness of the method is assessed bynalysing the transient response of metal oxide gas sensors either to a step change in gas concentration or to thermal modulation. The firstpplication considered consists in sorting samples from the headspace of crisps according to their rancidity state. It is shown that using the newynamic features results in an improvement of rancidity classification: 85.4% instead of the 68.7% reached when standard features are used (�G). Inhe second step, the method is applied to analyse the response of temperature-modulated micro-hotplate sensors. In this case, phase-space methodsive the opportunity to use novel features that describe sensor trajectories while adsorption and reaction kinetics are altered by the temperatureodulation. Tungsten oxide-based sensors are employed to detect ammonia, nitrogen dioxide and their binary mixtures at different concentrations.
ynamic features are used to build and validate PLS-DA classifiers and good results are obtained, not only ameliorating the gas identification rate95.6%), but also dramatically reducing the time needed to perform measurements (less than 2% of the response transient is needed to perform thenalysis).
2006 Elsevier B.V. All rights reserved.
Dyna
wapIisdftte
eywords: Micro-hotplate metal oxide gas sensors; Dynamic sensor response;
. Introduction
Although metal oxide gas sensors are inexpensive and veryensitive to different toxic species, they suffer from serioushortcomings such as poor selectivity (i.e., sensors are gener-lly responsive to a wide spectrum of gases), low repeatabilityi.e., memory effects cause sensor response to depend not onlyn the species being measured but also on the previous history ofhe sensor) and response drift (e.g. due to aging of the sensitiveayer).
Among the different approaches envisaged to fight theserawbacks, modulating the operating temperature of gas sensors
as been, in fact, remarkably successful in many applications1–4]. Temperature modulation alters the kinetics of the adsorp-ion and reaction processes that take place at the sensor surface� Based on results presented at the ISOEN 2005, Barcelona, Spain.∗ Corresponding author. Tel.: +34 977558502; fax: +34 977559605.
E-mail address: [email protected] (E. Llobet).
tmsRfimws
925-4005/$ – see front matter © 2006 Elsevier B.V. All rights reserved.oi:10.1016/j.snb.2006.05.028
mic moments; Phase space; Temperature modulation; Feature extraction
hile detecting reducing or oxidising species in the presence oftmospheric oxygen. This leads to the development of responseatterns, which are characteristic of the species being detected.n other words, by retrieving information from response dynam-cs, new response features are obtained that can confer moreelectivity to metal oxide sensors. Indeed, several authors haveeveloped this strategy and applied several techniques to extracteatures that are important for the discrimination or quantifica-ion of gases. Very often the fast Fourier transform (FFT) andhe discrete wavelet transform (DWT) have been used as featurextraction tools [4–9].
Even though the results obtained with temperature modula-ion are very promising, the frequency or frequencies used toodulate the operating temperature of gas sensors had been
elected in a non-systematic way by a trial and error procedure.ecently, we introduced a novel method, borrowed from the
eld of system identification, to systematically choose an opti-al set of temperature-modulation frequencies. The method,hich relies on the use of pseudo-random binary or multi-levelequences, was applied to the identification and quantification

2 Actu
o[
pfDrattmsta
fmafngsyDwu
ebo
icrutd
2
sotsatotifs
oddo
srted
[
tleaemjo
pgtat
M
M
M
M
M
wapotdfir
srgIt
20 A. Vergara et al. / Sensors and
f pollutant gases using a four-element micro-hotplate array10,11].
Additionally, we introduced for the first time the use of thehase space (PS) and dynamic moments (DM) as alternativeeature extraction techniques to the more traditional FFT andWT [12,13]. The methods were applied to the analysis of
esponse transients from QCM sensors, which resulted frompplying a stepwise change in the analyte concentration (adsorp-ion/desorption of chemicals from the sensor surface). In the PS,he temporal evolution of a sensor is represented by a time para-
etric trajectory, and DM introduce a set of descriptors for thehape of trajectories in the phase space. The use of such descrip-ors for qualitative gas analysis results in improved performances compared with the standard steady-state features.
In this paper, we introduce for the first time the DM as aeature extraction method when the working temperature oficro-hotplate gas sensors is modulated by means of eithermulti-level pseudo-random sequence (MLPRS) or a multi-
requency sinusoidal signal (e.g. five-frequency sinusoidal sig-al). The objective is to discriminate among different pollutantases and their binary mixtures using a four-element metal oxideemiconductor gas sensor microarray. The qualitative gas anal-sis results obtained by combining thermal modulation with theM feature extraction are compared against the ones obtainedhen classical feature extraction methods (e.g. the FFT) aresed.
As a previous step, the usefulness of the DM method forxtracting features from metal oxide gas sensors was assessedy studying a typical electronic nose problem: the classificationf potato crisps according to their rancidity state.
The organisation of the paper is as follows: Section 2 brieflyntroduces the phase space and dynamic moments, and how theyan be used to extract important characteristics from the dynamicesponse of gas sensors. Section 3 describes the experimental setp for the crisp rancidity and pollutant gases databases. In Sec-ion 4 the results are presented and discussed. The conclusionserived from this work are presented in Section 5.
. Phase space and dynamic moments
The nature of the sensing mechanisms ruling of chemicalensors is still far from full comprehension. The extractionf features from the response of chemical sensors consists inhe selection of some characteristics of their temporal responseequence, which results from the interaction between sensorsnd the compounds to be detected. The extracted features arehen input to pattern recognition systems. From a general pointf view, a chemical sensor can be considered as a dynamic sys-em whose response signal temporally evolves following, withts proper dynamics, the concentration of the analytes. There-ore, any of the currently available tools usually employed totudy the properties of dynamic systems may be employed [14].
The phase space (PS) is a central concept in the analysis
f dynamic systems. Given a system whose state is completelyescribed by m scalar variables, different states correspond toifferent points in a m-dimension vector space defined by anrthonormal basis where each direction correspond to one of thegdct
ators B 122 (2007) 219–226
calar variables. The fundamental property of the PS is the cor-espondence between each point and the instantaneous state ofhe system. A generic PS can be defined considering the Taken’smbedding theorem [15]. Given an observable quantity s(t) andefining a time lag τ, the space coordinates are
s(t) s(t + τ) . . . s(t + (k − 1)τ) ] (1)
The time evolution of s(t) results in a trajectory containinghe dynamic properties of the system. Trajectories assume aarge variety of shapes depending of the nature of the phenom-na. Neglecting the scale effects, the shapes of the trajectoriesre expected to be associated to the properties of the phenom-na. From this point of view, it is interesting to define someorphological descriptors able to encode the shape of the tra-
ectories. These morphological descriptors can then be used tobtain information about the system dynamics.
Here, sets of morphological descriptors representing thearameters analogous to the second moments of the area of aeometrical figure in a 2D space are considered. These quanti-ies are sometimes called dynamic moments (DM) [16,17]. Theyre calculated considering both the coordinates and bisectors ofhe phase space:
D2 = 1
n
n∑
i=0
xiyi (2)
D3PB =√
2
2n
n∑
i=0
x2i yi − xiy
2i (3)
D3SB =√
2
2n
n∑
i=0
2x3i + 3(x2
i yi − xiy2i ) (4)
D3x = 1
2n
n∑
i=0
x3i − 3xiy
2i (5)
D3y = 1
2n
n∑
i=0
x3i − 3x2
i yi (6)
here PB and SB are principal and secondary bisectors, x and yre the PS axis. Each of the moments describes the different mor-hological features of the trajectory, so that the collective usef more than one moment is required for an exhaustive descrip-ion. It is also important to emphasize that the moments’ valueepends on the time lag generating the PS. In Refs. [12,13] therst attempts to introduce the PS and DM to represent the tempo-al evolution of chemical sensor signals (QCM) was presented.
The temperature modulation has a two-fold effect on theensor signal. One is due to the straight relationship betweenesistance and temperature (thermistor effect) and the other isiven by temperature dependence of the sensitivity to the gas.ndeed, it is rather well known that for each gas an optimalemperature range exists. The combination of these two effects
ives rise to a complex signal not simply disentangled in the timeomain. On the other hand, nonlinear system theory claims thatomplex signals may find a more clear representation in alterna-ive space. From this point of view, the dynamic moments gives
Actuators B 122 (2007) 219–226 221
at
3
geiimDs
3i
ssAw
•
•
ceafifh(p1lcwp
3u
rlasr[mm
Fcf
rcaiugd
iv1dficdof the micro-hotplate gas sensors was modulated with a MLPRSsignal. In Fig. 2 a fragment of the signal used and a typical tran-sient response of a gas sensor are shown. Every measurement
A. Vergara et al. / Sensors and
information content synthesis in few descriptors of the sensorrajectory spanned in the phase space.
. Experimental
The performance of DM as feature extractor from metal oxideas sensors has been evaluated with the help of three differentxperiments. In particular, the first experiment, which consistsn the detection and classification of rancidity in potato crisps,s aimed at assessing the usefulness of the DM method withetal oxide gas sensors. The second and third experiments studyM combined with temperature modulated micro-hotplate gas
ensors.
.1. Experiment 1: detection and classification of rancidityn potato crisps
The first experiment was performed with a metal oxide gasensor-based e-nose. A 12-element TGS-type metal oxide gasensor array was used for this experiment. Four boxes (labelled, B, C and D) with 200 g packs of crisps (12 packs per category)ere prepared [18]:
Crisps in box A were stored during 18 days in a dry anddark conservation chamber, where their temperature was keptaround 20 ◦C.Crisps B, C and D were kept during 6, 12 and 18 days, respec-tively, in a rancidity accelerating chamber at around 40 ◦C.
The sample delivery system consisted of two temperature-ontrolled stainless-steel vessels (a sampling vessel and a ref-rence vessel). These chambers were identical and kept heatedt 70 ◦C. The measurement procedure was as follows: in therst step (concentration phase), the crisps were heated at 70 ◦Cor 30 min inside a sampling vessel in order to concentrate theeadspace. In the second step (measurement phase), the airflow150 ml/min) was re-circulated, which caused a dynamic sam-ling of the crisps’ headspace. During this phase, which lasted0 min, the resistance of the sensors was acquired and stored forater processing. Finally, in the third step (cleaning phase) therisps were removed from the sampling chamber and the systemas cleaned with dry air during 20 min, before the concentrationhase of a new measurement could start.
.2. Experiment 2: gas sensor temperature modulationsing multi-level PRS signals
The theory behind the generation of multi-level pseudo-andom sequences (MLPRS) based on multi-level maximumength signals, is well developed [19]. These kind of signalsre periodic, deterministic and have an autocorrelation functionimilar to white noise. MLPRS signals are generated using a shift
egister and modulo q addition, where q is the number of levels11,19]. When an MLPRS signal is applied to the heating ele-ent of a micro-hotplate gas sensor, its working temperature isodulated in a wide frequency range. An estimate of the impulseFsp
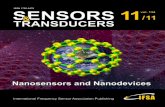
ig. 1. Encapsulated four-element sensor microarray. Sensor membranes areoated with screen-printed nano-particle tungsten oxide layers doped with dif-erent noble-metal catalysts (Pt, Pd and Au).
esponse of the sensor-gas system can be computed via the cir-ular cross-correlation of the temperature modulating MLPRSnd the sensor response signal. By using spectral analysis on thempulse response estimate, the modulation frequencies that areseful to discriminate between different gases and to estimateas concentration can be obtained in a systematic way [11]. Theata set was obtained as follows.
Four tungsten oxide gas microsensors (see Fig. 1) were placedn a 20-ml volume test chamber and were used to measureapours of three different concentrations of NH3 (100, 500 and000 ppm), NO2 (0.5, 1 and 2 ppm), and their binary mixturesiluted in dry air [10,11]. Each measurement was replicatedve times. The total gas flow was set to 200 ml/min and keptonstant. Moisture level was 10% RH (measured at 30 ± 1 ◦C)uring all the measurement process. The working temperature
ig. 2. A fragment of the MLPRS applied to the heating element of a microsen-or (top) and corresponding resistance transient of the WO3-based film in theresence of 100 ppm of NH3 (bottom).

2 Actu
ttctfstfpnt
3m
ttomu4stmc1tl
4
4
g
Fos
IttpGbsAtiai6cBcts
ecmτ
fs
fiTorf
22 A. Vergara et al. / Sensors and
ook approximately 10 min to complete, which corresponded tohe acquisition of 2.5 sequences of length 624 generated with alock frequency (fc) of 2 Hz. This frequency allows the sensorso be tested at temperature-modulating frequencies that rangerom 0 up to 0.45fc (i.e., near 1 Hz). The sampling frequency waset to 10 Hz. This sampling frequency is far above the fc usedo generate the MLPRS signal and the temperature modulatingrequency range used. This avoids the occurrence of aliasingroblems and, therefore, an incorrect reconstruction of the sig-al during its processing. More details on this experiment andhe sensors used can be found elsewhere [11].
.3. Experiment 3: temperature modulation oficro-hotplate gas sensors using multi-sinusoidal signals
After experiment 2, a reduced set of modulating frequencieshat helped discriminating the gases and gas mixtures were iden-ified. By selecting five of the best modulating frequencies, anptimised multi-sinusoidal signal was synthesised and used toodulate the working temperature of the micro-hotplate sensors
sed in experiment 2. The selected frequencies are 39.0, 480.7,29.0, 743.0 and 141.0 mHz. Fig. 3 shows a fragment of thisignal. The gases and concentrations measured using this newemperature-modulating signal were those described in experi-
ent 2 [11]. Every measurement took approximately 6 min toomplete and the sampling frequency was set, once again, to0 Hz. Once again, this sampling frequency is far higher thanhe frequencies used to synthesise the multi-sinusoidal modu-ating signal.
. Results and discussion
.1. Classification of rancidity in potato crisps
The responses of the 12 commercially available metal oxideas sensors were used to classify the rancidity of potato crisps.
ig. 3. Response of a WO3 micro-hotplate sensor in the presence 1000 ppmf NH3 when its operating temperature is modulated using the sum of fiveinusoidal signals.
rf
rrwsi
wrt
TCia
A
ABCD
ators B 122 (2007) 219–226
nitially, the feature extracted from each sensor response washe conductance change, defined as �G = Gmax − G0. Gmax ishe maximum value of the sensor electrical conductance in theresence of the volatiles from the headspace of the crisps, and0 is the sensor conductance in the presence of air (i.e. theaseline conductance). Fig. 4(a) shows a typical sensor tran-ient after the injection of the headspace of crisps. A fuzzyRTMAP network was used to classify the samples according
o their rancidity stage. The success rate reached in rancid-ty classification was 68.75% (estimated by the leave-one-outpproach). Additionally, a PLS-DA model was built to discrim-nate among crisp samples. The success rate of this method was8.75%, identical to the one obtained by the fuzzy ARTMAPlassifier. The samples misclassified belonged to categories, C and D. In other words, although the system could dis-riminate fresh crisps from rancid ones, errors occurred inhe discrimination of rancid samples with different ranciditytates.
Considering the poor classification results obtained in thisxperiment, the dynamics moments method was used for thelassification of crisp rancidity. The DM method was imple-ented with different time lags (τL) in order to select the optimal
L’s to be used. Optimal τL’s are those that maximise the dif-erences of a given feature (e.g. MD2) for different ranciditytates.
For this database, MD2 with τL = 2 and 25 s were consideredor each sensor within the array. A PLS-DA model was built andts performance evaluated using the leave-one-out approach. Inable 1 the confusion matrix resulting from the PLS-DA modelbtained with these dynamic moments is shown. The successate in potato crisp classification was 85.4%. This comparesavourably with the result obtained when the steady-state sensoresponse was used. The cross-validated PLS-DA models wereormed with 10 latent variables.
Finally, in addition to an increase in the classification successate, the DM method does not require the analysis of the wholeesponse transient [12] (i.e. until the steady-state is reached),hich allows for shortening the time needed to perform mea-
urements (see Fig. 4(a)). A summary and comparison of resultss shown in Table 2.
According to these results, the DM method can be applied
ith success to extract important features from the transientesponse of metal oxide gas sensors and can help reducing theime needed to perform measurements.
able 1onfusion matrix and success rate (85.4%) in the classification of crisp samples
n four categories of rancidity (A, B, C and D) using the dynamic moment MD2nd PLS-DA
ctual Predicted as
A B C D
11 1 0 01 10 0 10 1 9 20 0 1 11

A. Vergara et al. / Sensors and Actuators B 122 (2007) 219–226 223
Fig. 4. Fragments of the response signals used. The fragments in bold are those used to compute the dynamic moments. (a) Transient corresponding to the injection oft a MLs
4
rtsnFq[
TCuB
P
D�
�
pnanAt
he headspace of potato crisps; (b) response to a thermal modulation by means ofignal.
.2. MLPRS temperature modulation database
As mentioned in Section 3.2, an estimate of the impulseesponse for each gas-microsensor system was calculated viahe circular cross-correlation of the temperature modulatingequence and the sensor response signal. The spectral compo-
ents of the impulse response were obtained by computing theFT and those that were important for gas identification anduantification were then selected by a process described in Ref.11]. Once the spectral components were selected, one matrixable 2omparison among the different feature extraction and classification methodssed for the classification of potato crisps in four different rancidity classes (A,, C, and D)
rocessing method used Success rate indiscrimination (%)
Fragment of the responsesignal used (%)
M and PLS-DA 85.4 75 (7.5 min)G and NN 68.75 100 (10 min)G and PLS-DA 68.75 100 (10 min)
fhtrsaptihsmt
PRS signal; (c) response to a thermal modulation by means of a multi-sinusoidal
er sensor was formed, which contained as number of rows theumber of measurements performed (i.e. 45 measurements) ands number of columns the number of selected spectral compo-ents. Each matrix was used to build and validate either fuzzyRTMAP or PLS-DA classifiers to see whether it was possible
o correctly identify the gases.Alternatively, for every measurement performed, a small
ragment of the response signal was taken (see Fig. 4(b)) andad its characteristic features extracted by the dynamic momentsechnique. The duration of the fragments was 1.1 s, which rep-esented 0.35% of the total length of the response signals. Mea-urements were aligned to ensure that the response fragmentsnalysed corresponded always to the same fragment of the tem-erature modulating MLPRS sequence (i.e. the one that causedhe highest response change). Fig. 5 shows typical trajectoriesn the phase space of a MLPRS temperature-modulated micro-
otplate sensor in the presence of the gases studied. As this figurehows, the shape of these trajectories is gas-dependent. The DMethod is applied to extract characteristic features from theserajectories in the phase space.

224 A. Vergara et al. / Sensors and Actuators B 122 (2007) 219–226
Fig. 5. Typical response of a tungsten oxide micro-hotplate sensor to ammonia (500in the phase-space domain. The first derivative of the sensor response for τL = 3 ms (y
Table 3Confusion matrix and success rate (93.3%) in gas identification using a four-element microsensor array
Actual Predicted as
NH3 NO2 NH3 + NO2
NH3 15 0 0NO2 0 14 1NH3 + NO2 0 2 13
To
wbwiddomcmaslsr
mt
TCum
P
MM
C
C
Timt
4
ushg
mlcusfic
fmfs(
he sensors’ operating temperature was modulated by a MLPRS signal and justne dynamic moment (MD3y) was input to PLS-DA models.
Initially, different dynamic moments at different time lagsere computed. MD3y at τL = 1 and 3 ms was selected touild PLS-DA classifiers. The success rate in gas identificationas 93.3%. The number of latent variables was set to 6. It is
mportant to mention that the measurements used to select theynamic moments were different than those employed to vali-ate the PLS-DA models (performance estimation was basedn a leave-one-out approach). Table 3 shows the confusionatrix. While NH3 samples could be perfectly discriminated,
onfusions occurred between samples of NO2 and NO2 + NH3ixtures. If MD2 for τL = 1 and 2 ms, MD3x and MD3y at τL = 1
nd 3 ms are used simultaneously in the PLS-DA classifiers, theuccess rate in classification increases to 95.6%. The number ofatent variables was set to 9. Increasing the length of the responseignal used to compute the dynamic moments did not improveesults.
Table 4 summarises the results obtained using the dynamicoments and compares them with the results obtained using
he selection of spectral components as described in Ref. [11].
able 4omparison among the different feature extraction and classification methodssed for the identification of gases and gas mixtures (MLPRS temperatureodulation)
rocessing method used Success rate gasdiscrimination (%)
Fragment of the responsesignal used (%)
D3y and PLS-DA 93.3 0.35 (1.1 s)D2, MD3x, MD3y andPLS-DA
95.6 0.35 (1.1 s)
ross-correlation andNN
98 100 (312 s)
ross-correlation andPLS-DA
95.6 100 (312 s)
li
MilvwoIc
(tuof
ppm), nitrogen dioxide (1 ppm) and ammonia + nitrogen dioxide (500 + 1 ppm)-axis) is plotted vs. the sensor response (x-axis).
able 4 also shows that the DM method obtains a similar gasdentification performance while dramatically reduces measure-
ent time, since a very small fragment of the sensor responseransient is needed.
.3. Multi-sinusoidal modulation database
In this experiment the sensor operating temperature was mod-lated using a multi-sinusoidal signal. This signal was synthe-ised adding five sinusoidal signals, the frequencies of whichad been found to be important for discriminating among theases and gas mixtures studied in the previous experiment.
In the first step, the response signals of the temperature-odulated microsensors were processed as follows. The abso-
ute value of the FFT was computed and the values of the dcomponent and the five harmonics corresponding to the mod-lating frequencies were extracted. Therefore, from each mea-urement, six features were extracted and used to build either auzzy ARTMAP or a PLS-DA classifier aimed at discriminat-ng between the different species measured. The classifiers wereross-validated using a leave-one-out approach.
In the second step, the DM method was employed to extracteatures from the sensor responses. The method was imple-ented at different time lags (τL) and the use of response
ragments with different lengths was considered. Finally, amall fragment of the sensor response signal was selectedi.e. 2.5 s of the response, which is about 1.8% of its totalength). The fragment of the response signal selected is shownn Fig. 4(c).
The dynamic moments used to build PLS-DA classifiers wereD2 and MD3y at the time lags τL = 1 and 3 ms. The success rate
n gas and gas mixture identification was 95.6% (estimated byeave-one-out cross-validation). PLS-DA models used five latentariables. Table 5 shows the confusion matrix of this analysis:hile NH3 samples could be perfectly discriminated, confusionsccurred between samples of NO2 and NO2 + NH3 mixtures.ncreasing the length of the response signal fragment used toalculate the dynamic moments did not improve these results.
Fig. 6 shows the scores plot of the two first latent variablesLV) of a PLS-DA model built using the DM features. The first
wo LV captured more than 99.92% of data variance. As this fig-re shows, the cluster of ammonia samples is well apart from thether ones, while some overlapping exists between the clustersor nitrogen dioxide and for nitrogen dioxide and ammonia mix-
A. Vergara et al. / Sensors and Actu
Table 5Confusion matrix and success rate (95.6%) in gas identification using a four-element microsensor array
Actual Predicted as
NH3 NO2 NH3 + NO2
NH3 15 0 0NO2 1 13 1NH3 + NO2 0 0 15
The sensors’ operating temperature was modulated by a multi-sinusoidal sig-nal and different dynamic moments (MD2 and MD3y) were input to PLS-DAmodels.
Fta
tm
mitbm
sTr
TCut
P
DFF
an
trioccnAh
5
tfiTtkiiDemnc
stt
A
setUi(C
ig. 6. Thermal modulation by a sum of five sinusoidal signals: scores plot ofhe first two latent variables of the PLS-DA model calculated using the MD2nd MD3y dynamic moments as input features.
ures. These results illustrate the errors shown in the confusionatrix (Table 5).Table 6 summarises the results obtained using the dynamic
oments and compares them with the results obtained employ-ng the features extracted from the whole response signal usinghe FFT. Table 6 shows that the DM method obtains a slightlyetter gas identification performance while dramatically reduceseasurement time.Considering the datasets analysed, it clearly appears that the
election of the best dynamic moments is not straightforward.he relation between the information content of the DM and the
ecognition power does not follow an analytical law (either with
able 6omparison among the different feature extraction and classification methodssed for the identification of gases and gas mixtures (multi-sinusoidal tempera-ure modulation)
rocessing method used Success rate gasdiscrimination (%)
Fragment of the responsesignal used (%)
M and PLS-DA 95.6 1.8 (2.5 s)FT and PLS-DA 91.0 100 (142 s)FT and NN 93.3 100 (142 s)
st
R
ators B 122 (2007) 219–226 225
maximum or a convergence criterion) and its behaviour hasot been investigated yet.
Then, the performance of the classifier is not correlated withhe order of the moment and, in particular, the amount of cor-ect classifications does not reach a convergence value whilencreasing the order of DM. This situation is rather similar to theptimisation of the number of principal components in principalomponent regression (PCR), where the order of the principalomponents, proportional to the correspondent eigenvalue, isot correlated with their predictability of the regressed variable.lso in this case the optimal choice of principal components iseuristically carried out [20].
. Conclusions
In this paper, phase-space methods combined with tempera-ure-modulated metal oxide gas sensors were introduced for therst time in the analysis and evaluation of gas sensor responses.he phase space gives the opportunity to introduce novel fea-
ures, describing the trajectory while adsorption and reactioninetics are altered by the modulation of the sensors’ work-ng temperature. The usefulness of the new features for gasdentification was demonstrated by building and validating PLS-A classifiers. Tungsten oxide micro-hotplate gas sensors weremployed to detect ammonia, nitrogen dioxide and their binaryixtures at different concentrations. Good results were obtained
ot only ameliorating the discrimination rate, but also dramati-ally reducing the time needed to perform measurements.
Finally, by using the crisp rancidity database, it has beenhown that phase-space methods are also useful to extract impor-ant features from the transient response of metal oxide sensorso a step change in gas concentration.
cknowledgements
A. Vergara gratefully acknowledges a pre-doctoral scholar-hip FI2003 (ref. 1323 U07 E20) from the Autonomous Gov-rnment of Catalonia and the support and encouragement fromhe people of the Department of Electronic Engineering at theniversity of Rome “Tor Vergata”. This work has been funded
n part by the Spanish Commission for Science and TechnologyCICYT) under grant no. TIC2003-06301. We are grateful to Dr.ane and Dr. Gracia, who supplied us with the micro-hotplate
ubstrates and to Dr. Ivanov who deposited the gas-sensitivehick films.
eferences
[1] W.M. Sears, K. Colbow, F. Consadori, General characteristics of ther-mally cycled tin oxide gas sensors, Semicond. Sci. Technol. 4 (1989) 351–359.
[2] W.M. Sears, K. Colbow, F. Consadori, Algorithms to improve the selec-tivity of thermally cycled tin oxide gas sensors, Sens. Actuators 19 (1989)333–349.
[3] S. Nakata, Y. Kaneda, H. Nakamura, K. Yoshikawa, Detection and quan-tification of CO gas based on the dynamic response of a ceramic sensor,Chem. Lett. (1991) 1505–1508.
[4] S. Nakata, H. Nakamura, K. Yoshikawa, New strategy for the devel-opment of a gas sensor based on the dynamic characteristics: prin-

2 Actu
[
[
[
[
[
[
[
[
[
26 A. Vergara et al. / Sensors and
ciple and preliminary experiment, Sens. Actuators B 8 (1992) 187–189.
[5] R.E. Cavicchi, J.S. Suehle, K.G. Kreider, M. Gaitan, P. Chaparala, Fasttemperature programmed sensing for micro-hotplate gas sensors, IEEEElectron Device Lett. 16 (1995) 286–288.
[6] R.E. Cavicchi, J.S. Suehle, K.G. Kreider, M. Gaitan, P. Chaparala, Opti-mized temperature-pulse sequences for the enhancement of chemicallyspecific response patterns from micro-hotplates gas sensors, Sens. Actua-tors B 33 (1996) 142–146.
[7] A. Heiling, N. Barsan, U. Weimer, M. Schweizer-Berberich, J.W. Gardner,W. Gopel, Gas identification by modulating temperatures of SnO2-basedthick film sensors, Sens. Actuators B 43 (1997) 45–51.
[8] E. Llobet, R. Ionescu, S. Al-Khalifa, J. Brezmes, X. Vilanova, X. Correig,N. Barsan, J.W. Gardner, Multicomponent gas mixture analysis using asingle tin oxide sensor and dynamic pattern recognition, IEEE Sens. J. 1(2001) 207–213.
[9] E. Llobet, J. Brezmes, R. Ionescu, X. Vilanova, S. Al-Khalifa, J.W. Gardner,N. Barsan, X. Correig, Wavelet transform fuzzy ARTMAP based patternrecognition for fast gas identification using a micro-hotplate gas sensor,Sens. Actuators B 83 (2002) 238–244.
10] A. Vergara, E. Llobet, J. Brezmes, P. Ivanov, X. Vilanova, I. Gracia, C.
Cane, X. Correig, Optimized temperature modulation of micro-hotplate gassensors through pseudorandom binary sequences, IEEE Sens. J. 5 (2005)1369–1378.11] A. Vergara, E. Llobet, J. Brezmes, P. Ivanov, X. Vilanova, I. Gracia, C.Cane, X. Correig, Optimised temperature modulation of metal oxide micro-
[
[
ators B 122 (2007) 219–226
hotplates gas sensors through multi-level pseudo random sequences, Sens.Actuators B 111–112 (2005) 271–280.
12] E. Martinelli, C. Falconi, C. Di Natale, A. D’amico, Feature extraction ofchemical sensors in phase space, Sens. Actuators B 95 (2003) 132–139.
13] E. Martinelli, G. Pennazza, C. Di Natale, A. D’amico, Chemical sensorsclustering with the dynamic moments approach, Sens. Actuators B 101(2004) 346–352.
14] L. Ljung, T. Glad, Modelling of Dynamic Systems, Prentice Hall, Engle-wood Cliffs, NJ, 1994.
15] F. Takens, Detecting strange attractors in turbulence, in: D. Rand, L.S.Young (Eds.), Dynamical Systems and Turbulence, Warwick, 1980, pp.366–381.
16] A. Fichera, C. Losenno, A. Pagano, Clustering of chaotic dynamics of alean gas-turbine combustor, Appl. Energy 69 (2001) 101–117.
17] M. Annunziato, H.D.I. Abarbanel, Nonlinear dynamics for classificationof multiple flow regimes, in: Proceedings of the International Conferenceon Soft Computing, SOCO, Genoa, 1999.
18] M. Vinaixa, A. Vergara, C. Duran, E. Llobet, C. Badia, J. Brezmes, X.Vilanova, X. Correig, Fast detection of rancidity in potato crisps using e-noses based on mass spectrometry or gas sensors, Sens. Actuators B 106(2005) 67–75.
19] K. Godfrey, Perturbation Signals for System Identification, Prentice Hall,UK, 1993.
20] D.L. Massart, B.G. Vendeginste, S.N. Deming, Y. Michotte, L. Kaufman,Chemometrics: a textbook Data Handling in Science and Technology, vol.2, Elsevier Science, Amsterdam, The Netherlands, 1988.