
Enhanced energetic reasoning-based lower bounds for the resource constrained project scheduling...
8
Enhanced energetic reasoning-based lower bounds for the resource constrained project scheduling problem Mohamed Haouari a,b,c , Anis Kooli a,d, , Emmanuel Ne ´ ron d a Combinatorial Optimization Research Group, ROI, Ecole Polytechnique de Tunisie, BP 743, 2078 La Marsa,Tunisia b Department of Industrial Engineering, Faculty of Engineering, Ozyegin University, Istanbul, Turkey c Princess Fatimah Alnijris Research Chair for AMT, College of Engineering, King Saud University, Saudi Arabia d Laboratoire d’Informatique (EA2101), Universite´ Franc - ois Rabelais de Tours, Ecole Polytechnique de l’Universite ´ de Tours, F-37200 Tours, France article info Available online 31 May 2011 Keywords: Resource constrained project scheduling problem Lower bounds Energetic reasoning Dual feasible functions abstract We present new and effective lower bounds for the resource constrained project scheduling problem. This problem is widely known to be notoriously difficult to solve due to the lack of lower bounds that are both tight and fast. In this paper, we propose several new lower bounds that are based on the concept of energetic reasoning. A major contribution of this work is to investigate several enhanced new feasibility tests that prove useful for deriving new lower bounds that consistently outperform the classical energetic reasoning- based lower bound. In particular, we present the results of a comprehensive computational study, carried out on 1560 benchmark instances, that provides strong evidence that a deceptively simple dual feasible function- based lower bound is highly competitive with a state-of-the-art lower bound while being extremely fast. Furthermore, we found that an effective shaving procedure enables to derive an excellent lower bound that often outperforms the best bound from the literature while being significantly simpler. & 2011 Elsevier Ltd. All rights reserved. 1. Introduction The resource constrained project scheduling problem (RCPSP) is a central problem in scheduling theory that has great relevance in project management and more specifically to the crucial issue of allocating scarce resources to activities. Formally, the RCPSP is defined as follows: We consider a project that consists of a set A of n activities to be scheduled nonpreemptively. A set R of K renewable resources are required for processing these activities. Each resource k ðk A RÞ is continuously available from time zero onwards with resource capa- city B k . The processing of an activity j ðj A AÞ lasts p j units of time, and requires b jk units of resource k ðk A RÞ. Moreover, the activities are interrelated through precedence constraints. These time restrictions are often modeled using an appropriate activity-on-node graph G ¼ðV , AÞ. In this graph, V ¼f0, 1, ... , n þ 1g is the set of nodes corresponding to the n activities, in addition to two dummy zero- duration activities 0 and n þ 1 that represent the start and the end of the project, respectively. The arcset A represents the precedence restrictions (that is, ði, jÞ A A3 i is an immediate predecessor of jÞ. The objective is to minimize the project completion time (or, makespan). The RCPSP is a fundamental scheduling problem that has been extensively investigated in the operations research literature. We refer to the excellent book by Demeulemeester and Herroelen [19] for a comprehensive review of the impressive research effort that has been devoted to the study of the RCPSP. It is well known that the RCPSP is strongly NP-hard [1]. Moreover, from a computational perspective, the RCPSP turns out to be an extremely hard nut to crack. Indeed, to give an insight of the notorious intractability of the RCPSP, we mention that state-of-the-art exact algorithms fail to solve some well-known 60-activity benchmark instances that are still open about 50 years after their publication (see [2]). Actually, it is widely recognized that the effectiveness of exact enumerative algorithms strongly relies on the performance of the embedded lower bounds. Indeed, the lower bounding procedure that is invoked within the enumerative algorithm should ideally be both effective and efficient (that is, it should yield a tight lower bound while requiring a short computing time). However, a review of the lower bounds that have been proposed for the RCPSP (see Section 2) reveals that these bounds can be roughly classified into two categories. A first category includes fast lower bounds that exhibit an erratic (i.e., nonrobust) behavior. By contrast, the second category includes tight lower bounds that require a substantial computing burden. Clearly, none of these two categories is fully satisfactory with regard to the effective solution of large-scale RCPSPs. The objective of this paper is to propose new lower bounds that would prove both tight and fast. More precisely, we make the following contributions: 1. We propose new lower bounds that are derived through enhan- cing the energetic reasoning (ER) [3]. These enhancements are Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/caor Computers & Operations Research 0305-0548/$ - see front matter & 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.cor.2011.05.022 Corresponding author at: Combinatorial Optimization Research Group, ROI, Ecole Polytechnique de Tunisie, BP 743, 2078 La Marsa, Tunisia. E-mail address: [email protected] (A. Kooli). Computers & Operations Research 39 (2012) 1187–1194
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of Enhanced energetic reasoning-based lower bounds for the resource constrained project scheduling...

Computers & Operations Research 39 (2012) 1187–1194
Contents lists available at ScienceDirect
Computers & Operations Research
0305-05
doi:10.1
� Corr
Ecole Po
E-m
journal homepage: www.elsevier.com/locate/caor
Enhanced energetic reasoning-based lower bounds for the resourceconstrained project scheduling problem
Mohamed Haouari a,b,c, Anis Kooli a,d,�, Emmanuel Neron d
a Combinatorial Optimization Research Group, ROI, Ecole Polytechnique de Tunisie, BP 743, 2078 La Marsa,Tunisiab Department of Industrial Engineering, Faculty of Engineering, Ozyegin University, Istanbul, Turkeyc Princess Fatimah Alnijris Research Chair for AMT, College of Engineering, King Saud University, Saudi Arabiad Laboratoire d’Informatique (EA2101), Universite Franc-ois Rabelais de Tours, Ecole Polytechnique de l’Universite de Tours, F-37200 Tours, France
a r t i c l e i n f o
Available online 31 May 2011
Keywords:
Resource constrained project scheduling
problem
Lower bounds
Energetic reasoning
Dual feasible functions
48/$ - see front matter & 2011 Elsevier Ltd. A
016/j.cor.2011.05.022
esponding author at: Combinatorial Optimi
lytechnique de Tunisie, BP 743, 2078 La Mar
ail address: [email protected] (A. Kooli).
a b s t r a c t
We present new and effective lower bounds for the resource constrained project scheduling problem. This
problem is widely known to be notoriously difficult to solve due to the lack of lower bounds that are both
tight and fast. In this paper, we propose several new lower bounds that are based on the concept of energetic
reasoning. A major contribution of this work is to investigate several enhanced new feasibility tests that
prove useful for deriving new lower bounds that consistently outperform the classical energetic reasoning-
based lower bound. In particular, we present the results of a comprehensive computational study, carried out
on 1560 benchmark instances, that provides strong evidence that a deceptively simple dual feasible function-
based lower bound is highly competitive with a state-of-the-art lower bound while being extremely fast.
Furthermore, we found that an effective shaving procedure enables to derive an excellent lower bound that
often outperforms the best bound from the literature while being significantly simpler.
& 2011 Elsevier Ltd. All rights reserved.
1. Introduction
The resource constrained project scheduling problem (RCPSP) is acentral problem in scheduling theory that has great relevance inproject management and more specifically to the crucial issue ofallocating scarce resources to activities. Formally, the RCPSP is definedas follows: We consider a project that consists of a setA of n activitiesto be scheduled nonpreemptively. A set R of K renewable resourcesare required for processing these activities. Each resource k ðkARÞ iscontinuously available from time zero onwards with resource capa-city Bk. The processing of an activity j ðjAAÞ lasts pj units of time, andrequires bjk units of resource k ðkARÞ. Moreover, the activities areinterrelated through precedence constraints. These time restrictionsare often modeled using an appropriate activity-on-node graphG¼ ðV ,AÞ. In this graph, V ¼ f0,1, . . . ,nþ1g is the set of nodescorresponding to the n activities, in addition to two dummy zero-duration activities 0 and nþ1 that represent the start and the end ofthe project, respectively. The arcset A represents the precedencerestrictions (that is, ði,jÞAA3 i is an immediate predecessor of jÞ. Theobjective is to minimize the project completion time (or, makespan).
The RCPSP is a fundamental scheduling problem that has beenextensively investigated in the operations research literature. We
ll rights reserved.
zation Research Group, ROI,
sa, Tunisia.
refer to the excellent book by Demeulemeester and Herroelen [19] fora comprehensive review of the impressive research effort that hasbeen devoted to the study of the RCPSP. It is well known that theRCPSP is strongly NP-hard [1]. Moreover, from a computationalperspective, the RCPSP turns out to be an extremely hard nut to crack.Indeed, to give an insight of the notorious intractability of the RCPSP,we mention that state-of-the-art exact algorithms fail to solve somewell-known 60-activity benchmark instances that are still open about50 years after their publication (see [2]). Actually, it is widelyrecognized that the effectiveness of exact enumerative algorithmsstrongly relies on the performance of the embedded lower bounds.Indeed, the lower bounding procedure that is invoked within theenumerative algorithm should ideally be both effective and efficient
(that is, it should yield a tight lower bound while requiring a shortcomputing time). However, a review of the lower bounds that havebeen proposed for the RCPSP (see Section 2) reveals that these boundscan be roughly classified into two categories. A first category includesfast lower bounds that exhibit an erratic (i.e., nonrobust) behavior. Bycontrast, the second category includes tight lower bounds that requirea substantial computing burden. Clearly, none of these two categoriesis fully satisfactory with regard to the effective solution of large-scaleRCPSPs. The objective of this paper is to propose new lower boundsthat would prove both tight and fast. More precisely, we make thefollowing contributions:
1.
We propose new lower bounds that are derived through enhan-cing the energetic reasoning (ER) [3]. These enhancements are
M. Haouari et al. / Computers & Operations Research 39 (2012) 1187–11941188
achieved through nontrivial generalizations of the so-calledrevisited energetic reasoning (RER) that was initially developedby Hidri et al. [4] in the context of multiprocessor scheduling.
2.
We introduce the concept of reduced instance and show how itcould be used to derive a new enhanced lower bound usingpreviously proposed lower bounds.3.
We introduce a further improvement of ER using dual feasiblefunctions (DFFs).
4. We present the results of a comprehensive computationalstudy that provides evidence that the best proposed lowerbound exhibits an excellent performance while requiring amodest computing time.
The remainder of this paper is organized as follows. In Section 2, webegin by reviewing the lower bounds from the literature. In Section3, we present several generalizations of the revisited energeticreasoning. In Section 4, we show how the definition of a reducedauxiliary RCPSP instance offers an interesting way for deriving neweffective lower bounds. In Section 5, we explain how these boundsmight be subsequently improved through using DFFs. The results ofa comprehensive computational study of the proposed bounds arepresented in Section 6. Finally, we present, in Section 7, someconcluding remarks and directions for future research.
2. Review of classical lower bounds for the RCPSP
In this section, we briefly review classical lower bounds fromthe literature. For the sake of brevity, we restrict our attention tothe lower bounds that we shall use in the subsequent sections.For a comprehensive and thorough survey of lower bounds for theRCPSP, the reader is referred to Artigues et al. [2].
2.1. The capacity bound
To begin with, we introduce a simple O(Kn) bound that is oftenreferred to as the capacity bound, and that is based on a relaxationof the precedence constraints while considering each resourceseparately. This lower bound is computed as follows:
LBC ¼maxkAR
XjAA
bjkpj
Bk
2666
3777
2.2. The critical path bound
The critical path bound is a second simple lower bound that isbased on a relaxation of the capacity constraints. The critical pathcorresponds to the longest path from 0 to nþ1 in the precedencegraph G. We define lnðj,sÞ as the longest path in the precedencegraph between activity j and activity s. The release date rj ofactivity j (j¼ 0, . . . ,nþ1Þ is defined as lnð0,jÞ. According to thesedefinitions, the critical path value LBCP is equal to rnþ1.
Symmetrically, let C be a trial value, then the deadline dj of activityj (j¼ 0, . . . ,nþ1Þ is defined as dj ¼ C�lnðj,nþ1Þþpj. Hence, a time-window ½rj,dj� is associated with each activity j. Stinson et al. [5] hasproposed an improvement of the critical path lower bound. Activitiesthat cannot be processed simultaneously, due to at least one resourceconstraint, are identified. First, the critical path CP is computed. Next,if an activity j=2CP cannot be processed simultaneously with iACP,then ej
i the amount of time during which the two activities cannot beprocessed simultaneously is computed (according to both criticalpath and time-windows of activity). Then, emin
j ¼miniACPeij is com-
puted which is the minimal increasing of the LBCP value in order notto violate resource constraints. A valid lower bound, hereafter referred
to as the critical sequence bound, is
LBCS ¼ LBCPþ maxjAA\CP
eminj
The complexity of LBCS is Oðn2Þ:
2.3. The m-machine bound
The m-machine lower bound [6] is based on a relaxation of theRCPSP as a parallel machine problem with heads and tails (that is,Pjrj,qjjCmaxÞ: A relaxed instance is derived as follows:
�
Let m be the number of machines ðmA ½1,m� is a parameter andm represents the maximal number of machines. In ourexperiments, we empirically set m ¼ 5). For each resource kðkARÞ, we set umk ¼ Bk=ðmþ1Þ
� �þ1.
�
Let Emk ¼ fjAA : bjkZumk g be the set of jobs to be scheduled.� �
� For each job jAEmk , ajk ¼ bjk=umk is the number of jobs
associated with j. All these ajk jobs have a processing time pj,a head rj and a tail qj ¼ dnþ1�dj. Let Sm
k be the set containingall the jobs associated to jobs jAEm
k .
Thus, a Pjrj,qjjCmax instance is obtained. A valid OðnlognÞ boundfor this problem is
LBPðk,mÞ ¼1
mr1þ � � � þrmþ
XjASm
k
pjþq1þ � � � þqm
0@
1A
2666
3777
where r i and qi represent the ith smallest heads and tails of theactivities of the set Sm
k , respectively.Hence, a RCPSP valid bound is
LBP ¼maxkAR
maxmA ½1,m �
fLBPðk,mÞg
In the sequel, we refer to LBP as the m-machine bound.
2.4. The energetic reasoning
In this paper, the energetic reasoning is a central issue. Lowerbounds that we propose are based on this approach, using forinstance the concept of mandatory part of an activity in a giventime-interval. All these bounds belong to the class of destructive
lower bounds. At this point, it is worth recalling that a destructivebound could be derived using the following general approach.Starting from a trial value C, feasibility tests are carried out todetect an infeasibility (that is, the makespan cannot be shorterthan C). If an infeasibility is detected, then Cþ1 is a valid lowerbound (or, alternatively a dichotomous search might be used).The process is reiterated until no infeasibility is detected. In thissection, we briefly review both feasibility tests and time-boundadjustments of classical energetic reasoning, initially discussed byLahrichi [3], Erschler et al. [20] and Baptiste et al. [7].
Let ½t1,t2� be a time-interval. The work of an activity j ðjAAÞ inthis time-interval is given by the minimum between its left workdenoted Wl
jkðt1,t2Þ, i.e., when the activity starts at its release date,and its right work denoted as Wr
jkðt1,t2Þ, i.e., when the activityends at its deadline.
Wljkðt1,t2Þ ¼ bjkminðt2�t1,pj,maxð0,rjþpj�t1ÞÞ
Wrjkðt1,t2Þ ¼ bjkminðt2�t1,pj,maxð0,t2�djþpjÞÞ
Wjkðt1,t2Þ ¼minðWljkðt1,t2Þ,W
rjkðt1,t2ÞÞ

M. Haouari et al. / Computers & Operations Research 39 (2012) 1187–1194 1189
The total work Wkðt1,t2Þ over the time-interval ½t1,t2� and resourcek is defined as follows:
Wkðt1,t2Þ ¼XjAA
Wjkðt1,t2Þ
Property 1. If there exists a resource kAR such that
Wkðt1,t2Þ4Bkðt2�t1Þ then the instance is infeasible. Consequently,Cþ1 is a valid lower bound on the project duration.
If no contradiction (i.e., infeasibility) is detected, then a time-bound adjustment may be considered [7] using the concept ofslack of one activity jAA for a given resource kAR on a giventime-interval ½t1,t2�:
sjkðt1,t2Þ ¼ Bkðt2�t1Þ�fWkðt1,t2Þ�Wjkðt1,t2Þg ð1Þ
Property 2. (Adjustment procedure)
If sjkðt1,t2ÞoWljkðt1,t2Þ then rj’max rj,t2�
sjkðt1,t2Þ
bjk
� �� �
If sjkðt1,t2ÞoWrjkðt1,t2Þ then dj’min dj,t1þ
sjkðt1,t2Þ
bjk
� �� �
These time-bound adjustments are propagated on the precedence
graph G.
Notice that an important issue is related to the determinationof the relevant set of time-intervals on which it may be useful toboth check feasibility conditions and time-bound adjustments.Baptiste et al. [7] have proved that there is a quadratic number ofsuch time-intervals.
3. Revisited energetic reasoning
In this section, we introduce new bounds for the RCPSP thatare based on the so-called revisited energetic reasoning (RER). TheRER was initially introduced by Hidri et al. [4] in the context ofparallel machine scheduling with heads and tails. It aims atstrengthening the classical ER by improving the computation ofthe work through formulating an integer programming (IP)problem. It is noteworthy that a preliminary version of thissection has been published in a conference proceedings [8]. Inthe following, we introduce some additional notation and then wepresent several variants of RER-based lower bounds.
3.1. Notation
Define Aðt1,t2Þ ¼ fjAA : ðrjþpj4t1Þ4ðdj�pjot2Þg the set ofactivities that are necessarily processed during ½t1,t2�.
Moreover, let A0ðt1,t2Þ ¼ fjAAðt1,t2Þ : ðrjþpjZt2Þ 4ðdj�pj rt1Þg. Each activity jAA0ðt1,t2Þ must be scheduled over the wholeinterval ½t1,t2�. Thus, we can then remove activity j from Aðt1,t2Þ
and decrease the capacity Bk of resource k by bjk units. Hence, theactual resource capacity mkðt1,t2Þ is computed as follows:
mkðt1,t2Þ’Bk�X
jAA0ðt1 ,t2Þ
bjk
In the sequel, we shall say that an activity j is:
�
placed at the left position if it is scheduled at its release date; � placed at the right position if it finishes processing at itsdue date;
� placed at the inside position if it is entirely processed withinthe time-interval.
The set Aðt1,t2Þ\A0ðt1,t2Þ is partitioned into the following sevensubsets:
�
AL ¼ fjAAðt1,t2Þ\A0ðt1,t2Þ : ðrjþpjot2Þ4ðdj�pjrt1Þg. The activi-ties of this subset must be scheduled at the left position. � AR ¼ fjAAðt1,t2Þ\A0ðt1,t2Þ : ðrjþpjZt2Þ4ðdj�pj4t1Þg. The activi-ties of this subset must be scheduled at the right position :
�
AI ¼ fjAAðt1,t2Þ\A0ðt1,t2Þ : ðt1orjÞ4 ðdjot2Þg. The activities ofthis subset must be scheduled inside the time-interval. � ALI ¼ fjAAðt1,t2Þ\A0ðt1,t2Þ : ðrjrt1Þ4ðdjot2Þ4ðdj�pj4t1Þg.The activities of this subset are either scheduled at the leftposition or inside the time-interval.
� ARI ¼ fjAAðt1,t2Þ\A0ðt1,t2Þ : ðrj4t1Þ4ðdjZt2Þ4ðrjþpjot2Þg.The activities of this subset are either scheduled at the rightposition or inside the time-interval.
� ALR ¼ fjAAðt1,t2Þ\A0ðt1,t2Þ : ðrjrt1Þ4ðdjZt2Þ4ðrjþpjot2Þ4ðdj�pj4t1Þ4ðpjZt2�t1�1Þg The activities of this subset areeither scheduled at the left position or at the right position(since they cannot be inside the time-interval). � ALIR ¼ fjAAðt1,t2Þ\A0ðt1,t2Þ : ðrjrt1Þ4ðdjZt2Þ4ðrjþpjot2Þ4ðdj�pj4t1Þ4ðpjot2�t1�1Þg. The activities of this subset canbe at any position within the time-interval.We also denote by:
AL ¼ALI [ALR [ALIR; the set of activities that may be placed at
the left position:
AR ¼ARI [ALR [ALIR; the set of activities that may be placed at
the right position:
AI ¼ALI [ARI [ALIR; the set of activities that may be placed
inside the interval:In the sequel, and for the sake of clarity, we shall replace
Aðt1,t2Þ\A0ðt1,t2Þ,mkðt1,t2Þ, Wljkðt1,t2Þ, Wr
jkðt1,t2Þ and Wkðt1,t2Þ by A,
mk, Wjkl , Wr
jk and Wk, respectively.
Remark 1. Simple feasibility conditions—Hidri et al. [4] derivedseveral simple feasibility conditions that are valid for the identicalparallel machine problem with release dates and delivery times.These conditions can be easily adapted to the RCPSP. Thesefeasibility conditions are the following:
Condition 1. If there exists a resource kAR and an activity jAAsuch that bjk4mk then the instance is infeasible.
Condition 2. If there exists a resource kAR such that mko0 thenthe instance is infeasible.
Condition 3. If there exists a resource kAR such that mk ¼ 0 andan activity jAA such that bjk40 then the instance is infeasible.
Condition 4. If there exists a resource kA R and an activityjAALR such that bjk4mk�minð
PjAAL
bjk,P
jAARbjkÞ then the
instance is infeasible.
Condition 5. If there exists a resource kAR such thatmaxð
PjAAL
bjk,P
jAARbjkÞ4mk then the instance is infeasible.
Condition 6. If there exists a resource kAR such thatPjAAL[AR[ALR
bjk42mk then the instance is infeasible.
3.2. Exact revisited energetic reasoning
For each resource k ðkARÞ, we compute the residual capacitiesmk
l and mkr over the interval ½t1,t2� available for activities of the set

M. Haouari et al. / Computers & Operations Research 39 (2012) 1187–11941190
AL and AR, respectively, i.e.,
mlk ¼min
XjAAL
bjk,mk�X
jAAL
bjk
0@
1A
mrk ¼min
XjAAR
bjk,mk�X
jAAR
bjk
0@
1A
Now, we present a 0–1 programming model that computes anenhanced estimate of the total work over the time-interval ½t1,t2�
for resource k. Toward this end, we define for each activity jAAthe following binary variables:
�
xj ¼ 1 if activity j is scheduled at the left position, and0 otherwise; � yj ¼ 1 if activity j is scheduled at the right position, and0 otherwise;
� zj ¼ 1 if activity j is scheduled inside the interval, and0 otherwise.
The model is the following:
Ek ¼minX
jAAL
Wljkxjþ
XjAAR
Wrjkyjþ
XjAAI
Wijkzj ð2Þ
s:t:
xjþzj ¼ 1, 8jAALI ð3Þ
yjþzj ¼ 1, 8jAARI ð4Þ
ðP1Þ xjþyj ¼ 1, 8jAALR ð5Þ
xjþyjþzj ¼ 1, 8jAALIR ð6Þ
XjAAL
bjkxjrmlk ð7Þ
XjAAR
bjkyjrmrk ð8Þ
xj,yj,zjAf0,1g, 8jAALI [ARI [ALR [ALIR ð9Þ
where Wijk � bjkpj.
Constraints (3)–(6) require that each activity is scheduled inexactly one position (left, right or inside). Constraints (7) and (8)enforce the left and right capacities of resource k, respectively.Constraint (9) states that the variables are binary-valued.
The improved work W kðt1,t2Þ is given by
W kðt1,t2Þ ¼ EkþX
jAAL
Wljkþ
XjAAI
Wijkþ
XjAAR
Wrjk
We have the following result:
Property 3. If there exists a resource kAR such that W kðt1,t2Þ4mkðt2�t1Þ then the instance is infeasible.
3.3. Relaxed revisited energetic reasoning
Since the solution of models (2)–(9) might require an excessivecomputing time, it might be useful to consider relaxations of thismodel that are efficiently solvable. To that aim, we propose arelaxation that consists in decomposing the problem into twoindependent knapsack problems. This relaxation, hereafter calledrelaxed revisited energetic reasoning is described as follows.
First, we replace variables zj of formulation (P1) by
zj ¼ 1�xj, 8jAALI
zj ¼ 1�yj, 8jAARI
zj ¼ 1�xj�yj, 8jAALIR
Thus, (2) becomes
minX
jAALI[ARI[ALR[ALIR
Wijkþ
XjAALðWl
jk�WijkÞxjþ
XjAARðWr
jk�WijkÞyj
Let
~Wl
jk ¼Wijk�Wl
jk, 8jAAL
~Wr
jk ¼Wrjk�Wi
jk, 8jAAR
Formulation (P1) is equivalent to
maxX
jAAL
~Wl
jkxjþX
jAAR
~Wr
jkyj ð10Þ
s:t:
xjþyj ¼ 1, 8jAALR ð11Þ
ðP2Þ xjþyjr1, 8jAALIR ð12Þ
XjAAL
bjkxjrmlk ð13Þ
XjAAR
bjkyjrmrk ð14Þ
xj,yjAf0,1g, 8jAALI [ARI [ALR [ALIR ð15Þ
If we relax constraints (11) and (12) then we obtain twoindependent knapsack problems. We solve exactly each oneseparately using dynamic programming. Let ~Ek be the sum ofthe objective functions of the two problems, then
~W kðt1,t2Þ ¼X
jAALI[ARI[ALR[ALIR
Wijkþ
XjAAL
Wljkþ
XjAAI
Wijkþ
XjAAR
Wrjk�
~Ek
is a lower bound of the total work over time-interval ½t1,t2�.Hence, we have the following property:
Property 4. If there exists a resource kAR such that~W kðt1,t2Þ4mkðt2�t1Þ then the instance is infeasible.
Remark 2. To derive better estimate of the slacks, we cansubstitute in (1) the quantity fWkðt1,t2Þ�Wjkðt1,t2Þg by Tjkðt1,t2Þ
which represents the work calculated by (P1) or (P2) if we removeactivity j from A. Nevertheless, we empirically found that thesetime-bound adjustments have not improved the quality of theproposed lower bounds.
3.4. Global revisited energetic reasoning
Since formulation (P1) seeks for minimizing the work ofactivities scheduled in the left, right, or at the inside of an interval½t1,t2� for a specified resource k, then we might have cases wherean activity is scheduled in the left position for a resource k whileit is scheduled in the right position for a resource k0ak. Hence, abetter way to make feasibility tests consists in taking into accountall the resources simultaneously. This approach is based on aformulation that is described as follows.
Let Ek ¼mkðt2�t1Þ�ðP
jAALWl
jkþP
jAARWr
jkþP
jAAIWi
jkÞ be thework available on resource k for activities of the setALI [ARI [ALR [ALIR.

M. Haouari et al. / Computers & Operations Research 39 (2012) 1187–1194 1191
The corresponding IP can be stated in the following way:
x¼minXkAR
ek ð16Þ
s:t:
xjþzj ¼ 1, 8jAALI ð17Þ
yjþzj ¼ 1, 8jAARI ð18Þ
xjþyj ¼ 1, 8jAALR ð19Þ
ðP3Þ xjþyjþzj ¼ 1, 8jAALIR ð20Þ
XjAAL
bjkxjrmlk, 8kAR ð21Þ
XjAAR
bjkyjrmrk, 8kAR ð22Þ
XjAAL
Wljkxjþ
XjAAR
Wrjkyjþ
XjAAI
Wijkzj�ekrEk,8kAR ð23Þ
xj,yj,zjAf0,1g, 8jAALI [ARI [ALR [ALIR ð24Þ
ekZ0, 8kAR ð25Þ
Constraints (17)–(22) have the same signification as in (P1).Constraint (23) is added to check whether it is possible toschedule the activities such that the sum of their works do notexceed the total work available on each resource k. The slackvariables ek are used to enforce this latter restriction. Indeed, ek isequal to zero if and only if the total work available on resource k
is enough to schedule all the activities.With this new mathematical model, we make only one feasi-
bility test (and not K tests as in the revisited energetic reasoning).This new feasibility condition may be stated as follows.
Property 5. If x40 then the instance is infeasible.
Proof. Obvious. &
In the sequel, we refer to this approach as the global revisited
energetic reasoning.
4. Improved energetic reasoning
Given a trial value C and a time-interval ½t1,t2�, we define
pjðt1,t2Þ ¼minðt2�t1,pj,maxð0,rjþpj�t1Þ,maxð0,t2�djþpjÞÞ
a lower bound on the total processing time of activity jAA during½t1,t2�.
Given an RCPSP instance, a trial value C, and a time-interval ½t1,t2�
we construct an associated reduced instance in the following way:
�
the set of activities is Aðt1,t2Þ, � the processing time of activity jAAðt1,t2Þ is pjðt1,t2Þ, � the values of the availabilities of the renewable resources, theresources requirements as well as the precedence constraintsare similar to those of the genuine instance.
Proposition 1. If the optimal makespan of the reduced instance is
strictly larger than the time-window width (t2�t1) then Cþ1 is a
valid lower bound on the optimal makespan of the genuine instance.
Proof. It suffices to observe that if the optimal makespan of thereduced instance is strictly larger than the time-window width
(t2�t1) then the mandatory parts of the activities that belong toAðt1,t2Þ cannot be completed within ½t1,t2�. Thus, the genuineinstance is infeasible. &
In our implementation, we invoke a general-purpose MIPsolver to solve an exact feasibility problem through using thefollowing time-indexed formulation [9].
Findd ð26Þ
s:t:
Xdj�pj
t ¼ maxðrj ,t1Þ
djt ¼ 1, 8jAAðt1,t2Þ, ð27Þ
Xdi�pi
t ¼ t
ditþXtþpi�1
t ¼ maxðrj ,t1Þ
djtr1, 8ði,jÞAA,tA ½rj�piþ1,di�pi� ð28Þ
XjAAðt1 ,t2Þ
bjk
Xminðt,dj�pjÞ
s ¼ maxðrj ,t�pjþ1Þ
djsrBk, 8kAR,tA ½t1,t2� ð29Þ
djt Af0,1g, 8jAAðt1,t2Þ, tA ½maxðrj,t1Þ,dj�pj� ð30Þ
where djt ¼ 1, if activity j starts at time t, and 0 otherwise,8jAAðt1,t2Þ, tA ½maxðrj,t1Þ, dj�pj�. Clearly, Constraint (27) requiresthat each activity has exactly one starting time. Constraints (28)and (29) enforce the precedence and resource constraints,respectively.
In the sequel, we denote IERn the bound based on Proposition1. In our implementation, and for the sake of efficiency, onlyreduced instances whose number of activities is smaller than 12and having a time-window width shorter than 25 are considered.
A straightforward (and practically useful) consequence ofProposition 1 is the following:
Corollary 1. If a lower bound on the optimal makespan of the
reduced instance is strictly larger than the time-window width
(t2�t1) then Cþ1 is a valid lower bound on the optimal makespan
of the genuine instance.
In the sequel, we refer to improved energetic reasoning thevariant of the energetic reasoning that is based on Proposition 1or Corollary 1. Within this context, it is easy to realize that if thecapacity bound is used then the improved energetic reasoningamounts to the classical energetic reasoning. In our experiments,we implemented the improved energetic reasoning together withthe critical sequence as well as the m-machine lower bounds.
5. Energetic reasoning and dual feasible functions
Definition 1. A function f is said to be discrete dual feasible if forany discrete finite set S of nonnegative integers, we haveXxA S
xrB)XxA S
f ðxÞr f ðBÞ
where B is a nonnegative integer.Dual feasible functions (DFFs) have been extensively used for
deriving lower bounds both for one- and two-dimensional binpacking problems (see [10–12]). The main idea is based on using aDFF to transform the item height and width and then to compute alower bound on the transformed instance. Fekete and Schepers [10]show that this latter bound is indeed valid for the genuine instance.

M. Haouari et al. / Computers & Operations Research 39 (2012) 1187–11941192
Interestingly, it is possible to use a very similar idea within theframework of energetic reasoning for the RCPSP. To that aim, afterderiving a reduced instance, we use an appropriate discrete DFF togenerate a modified instance by transforming the resource require-ments and the resource availabilities as well. Next, the capacitybound, the critical sequence bound, and the m-machine bound arecomputed in turn. Eventually, the largest bound is retained. Wedenote the resulting bound by DFF: Moreover, we implemented asecond, and much simpler, DFF-based lower bound in the followingway: we simply use the simple feasibility conditions (see Remark 1)to detect an infeasibility of the transformed instance. We refer thederived lower bound by DFFn:
Remark 3. It is easy to see that the lower bound that is based onProperty 1 reduces to a trivial case of DFF.
Remark 4. Following the idea of Tercinet and Neron [13], we canuse the modified instance for time-bound adjustments.
After performing extensive experiments to assess the computa-tional performance of the DFFs proposed in Fekete and Schepers[10] and Carlier et al. [12], we found that the best performance isobtained though the combination of the two following DFFs.
The first one, f s1ð1rsrB=2Þ, was proposed in Carlier et al. [12].
It is defined as follows:
f s1 : ½0,B�-½0,MBðB,IÞ�
x/
MBðB,IÞ�MBðB�x,IÞ if x4B=2
1 if srxrB=2
0 otherwise
8><>:
where MBðB,IÞ is the solution of the knapsack problem defined byitems of the set I¼ fiA ½1,n� : srcirB=2g ðs¼ 1, . . . ,B=2Þ, capacityB, and where the objective is to maximize the number of selecteditems.
Remark 5. In a strict sense, f s1 is a data dependent feasible
function (see [12]).
The second DFF that we used has been proposed in Fekete andSchepers [10] and is defined (in a slightly different way) asfollows:
f s2 : ½0,B�-½0,B�
x/
x ifxðsþ1Þ
BAZ
xðsþ1Þ
B
� �B
sotherwise
8>>><>>>:
with s¼1,2.
Table 1Results of the bounds on KSD60.
MGAP (%) MTime (s) #ðLB¼UBÞ #ðLB¼maxLBÞ #ðLB4CERÞ TAD
CER 7.96 0.03 56 160 0 0
EER 3.08 1.50 326 448 290 1713
RER 3.09 0.04 326 446 288 1711
GER 3.07 0.31 327 453 295 1719
GER_LP 3.09 0.35 326 446 288 1711
IER 2.92 0.05 330 461 303 1779
IERn 2.87 32.33 332 476 317 1801
6. Experimental results
To assess the performance of the proposed lower bounds, weconsidered PSPLIP the well-known set of benchmark instancesproposed by Kolisch et al. [15]. These instances were generatedaccording to three parameters: network complexity (NC),resource factor (RF) and resource strength (RS). For each triplet(NC,RF,RS), Kolish et al. generated 10 instances for a total of 480instances for 60 and 90 activities (KSD60 and KSD90), respec-tively, and 600 instances for 120 activities (KSD120). Hence, ourtestbed includes a total of 1560 instances.
All the experiments were conducted on a personal computerPentium IV 3 GHz with 1 GB of RAM and running under Windows XP.All the bounds were coded in C language and all the LPs and IPs were
solved using CPLEX 11. Moreover, for computing the energeticreasoning-based lower bounds, we considered the set S of intervalsthat is defined as follows: S¼ fðt1,t2Þ; t1AO1,t2AO2g, where
�
O1 ¼ frj,j¼ 1, . . . ,ng [ fdj�pj,j¼ 1, . . . ,ng; � O2 ¼ fdj,j¼ 1, . . . ,ng [ frjþpj,j¼ 1, . . . ,ng.It is worth mentioning that, for the sake of efficiency, S includesfewer time-intervals than those previously considered in Baptisteet al. [7].
6.1. First set of experiments: computational performance of the
proposed lower bounds
We conducted a first set of experiments to assess the perfor-mance of the following seven lower bounds:
�
CER: the classical energetic reasoning-based bound (seeSection 2.4); � EER: the exact revisited energetic reasoning-based bound (seeSection 3.2);
� RER: the relaxed revisited energetic reasoning-based bound(see Section 3.3);
� GER: the global energetic reasoning-based bound (see Section 3.4); � GER_LP: LP relaxed variant of GER; � IER: the improved energetic reasoning bound that is based onCorollary 1 and where the feasibility test is based on thesimple bound that is equal to maxðLBC ,LBCS,LBPÞ;
� IERn: the improved energetic reasoning bound that is based onProposition 1.
All these bounds include time-bound adjustments described inProperty 2, i.e., the feasibility tests are reiterated until neitherfurther adjustments are achieved nor infeasibility is detected.
Table 1 displays a summary of the computational results thatwere obtained on the 60-activity set of instances. For each lowerbound, we provide: MGAP: the mean percentage deviation withrespect to the best known upper bound, MTime: the mean CPU time(in seconds), #ðLB¼UBÞ: number of times where the lower bound isequal to the best known upper bound, #ðLB¼maxLBÞ : number oftimes where the lower bound is maximal, #ðLB4CERÞ : number oftimes where the lower bound outperforms the classical energeticreasoning-based bound, and TAD : total absolute deviation from CER.
A first striking observation is that all the proposed enhancedenergetic reasoning-based lower bounds consistently outperform theclassical energetic reasoning-based lower bound. More precisely, weobserve that the two variants of the reduced instance-based lowerbounds IERn and IER exhibit a very good performance. Indeed, IERn
yields the tightest average deviation and strictly dominates CER in317 instances out of 480 (66%), while IER yields the second bestaverage deviation but is extremely fast. Moreover, we observe thatbounds EER, RER, GER, and GER_LP have a quite similar overallperformance (even though, GER stands out marginally by its qualityand RER is the quickest). Surprisingly, we observe that the 0–1
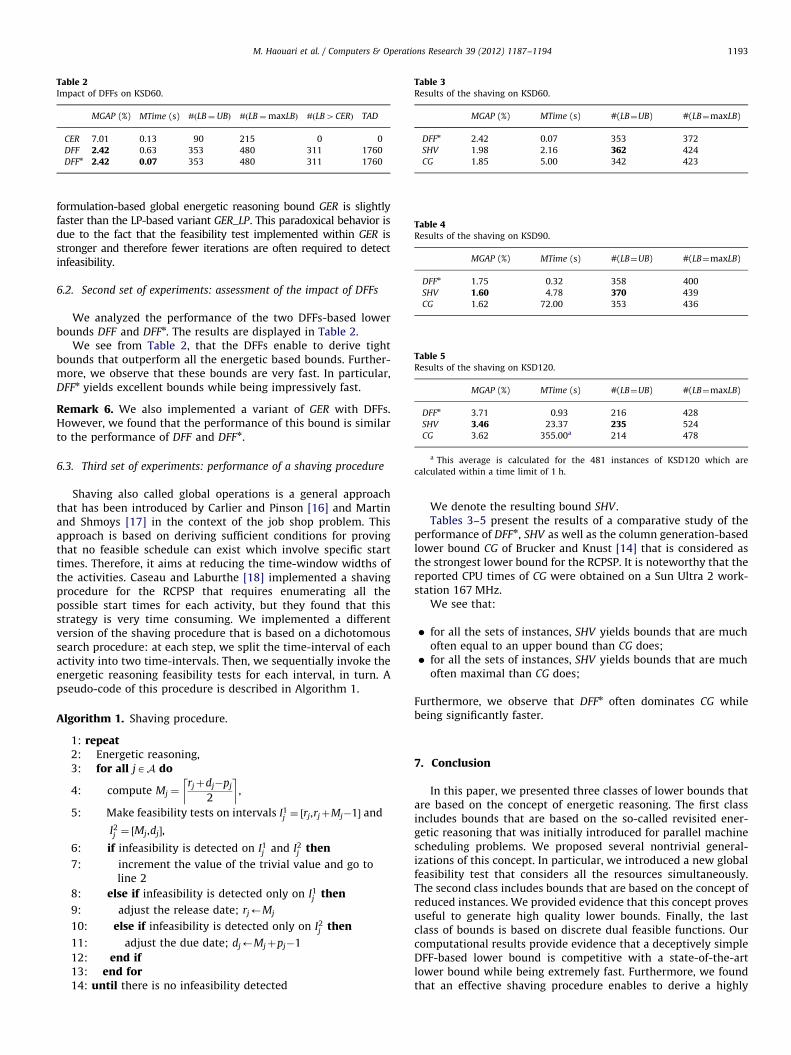
Table 2Impact of DFFs on KSD60.
MGAP (%) MTime (s) #ðLB¼UBÞ #ðLB¼maxLBÞ #ðLB4CERÞ TAD
CER 7.01 0.13 90 215 0 0
DFF 2.42 0.63 353 480 311 1760
DFFn 2.42 0.07 353 480 311 1760
Table 3Results of the shaving on KSD60.
MGAP (%) MTime (s) #(LB¼UB) #(LB¼maxLB)
DFFn 2.42 0.07 353 372
SHV 1.98 2.16 362 424
CG 1.85 5.00 342 423
Table 4Results of the shaving on KSD90.
MGAP (%) MTime (s) #(LB¼UB) #(LB¼maxLB)
DFFn 1.75 0.32 358 400
SHV 1.60 4.78 370 439
CG 1.62 72.00 353 436
Table 5Results of the shaving on KSD120.
MGAP (%) MTime (s) #(LB¼UB) #(LB¼maxLB)
DFFn 3.71 0.93 216 428
SHV 3.46 23.37 235 524
CG 3.62 355.00a 214 478
a This average is calculated for the 481 instances of KSD120 which are
calculated within a time limit of 1 h.
M. Haouari et al. / Computers & Operations Research 39 (2012) 1187–1194 1193
formulation-based global energetic reasoning bound GER is slightlyfaster than the LP-based variant GER_LP. This paradoxical behavior isdue to the fact that the feasibility test implemented within GER isstronger and therefore fewer iterations are often required to detectinfeasibility.
6.2. Second set of experiments: assessment of the impact of DFFs
We analyzed the performance of the two DFFs-based lowerbounds DFF and DFFn. The results are displayed in Table 2.
We see from Table 2, that the DFFs enable to derive tightbounds that outperform all the energetic based bounds. Further-more, we observe that these bounds are very fast. In particular,DFFn yields excellent bounds while being impressively fast.
Remark 6. We also implemented a variant of GER with DFFs.However, we found that the performance of this bound is similarto the performance of DFF and DFFn.
6.3. Third set of experiments: performance of a shaving procedure
Shaving also called global operations is a general approachthat has been introduced by Carlier and Pinson [16] and Martinand Shmoys [17] in the context of the job shop problem. Thisapproach is based on deriving sufficient conditions for provingthat no feasible schedule can exist which involve specific starttimes. Therefore, it aims at reducing the time-window widths ofthe activities. Caseau and Laburthe [18] implemented a shavingprocedure for the RCPSP that requires enumerating all thepossible start times for each activity, but they found that thisstrategy is very time consuming. We implemented a differentversion of the shaving procedure that is based on a dichotomoussearch procedure: at each step, we split the time-interval of eachactivity into two time-intervals. Then, we sequentially invoke theenergetic reasoning feasibility tests for each interval, in turn. Apseudo-code of this procedure is described in Algorithm 1.
Algorithm 1. Shaving procedure.
1: repeat
2: Energetic reasoning,3: for all jAA do
4: compute Mj ¼rjþdj�pj
2
� ,
5: Make feasibility tests on intervals I1j ¼ ½rj,rjþMj�1� and
I2j ¼ ½Mj,dj�,
6: if infeasibility is detected on I1j and I2
j then
7: increment the value of the trivial value and go toline 2
8: else if infeasibility is detected only on I1j then
9: adjust the release date; rj’Mj
10: else if infeasibility is detected only on I2j then
11: adjust the due date; dj’Mjþpj�1
12: end if
13: end for 14: until there is no infeasibility detectedWe denote the resulting bound SHV .Tables 3–5 present the results of a comparative study of the
performance of DFFn, SHV as well as the column generation-basedlower bound CG of Brucker and Knust [14] that is considered asthe strongest lower bound for the RCPSP. It is noteworthy that thereported CPU times of CG were obtained on a Sun Ultra 2 work-station 167 MHz.
We see that:
�
for all the sets of instances, SHV yields bounds that are muchoften equal to an upper bound than CG does; � for all the sets of instances, SHV yields bounds that are muchoften maximal than CG does;
Furthermore, we observe that DFFn often dominates CG whilebeing significantly faster.
7. Conclusion
In this paper, we presented three classes of lower bounds thatare based on the concept of energetic reasoning. The first classincludes bounds that are based on the so-called revisited ener-getic reasoning that was initially introduced for parallel machinescheduling problems. We proposed several nontrivial general-izations of this concept. In particular, we introduced a new globalfeasibility test that considers all the resources simultaneously.The second class includes bounds that are based on the concept ofreduced instances. We provided evidence that this concept provesuseful to generate high quality lower bounds. Finally, the lastclass of bounds is based on discrete dual feasible functions. Ourcomputational results provide evidence that a deceptively simpleDFF-based lower bound is competitive with a state-of-the-artlower bound while being extremely fast. Furthermore, we foundthat an effective shaving procedure enables to derive a highly

M. Haouari et al. / Computers & Operations Research 39 (2012) 1187–11941194
competitive lower bound that often outperforms the best boundfrom the literature while being significantly simpler.
The lower bounds derived in this paper constitute an encoura-ging first step toward the development of an effective branch-and-bound procedure for solving the RCPSP. The development ofsuch exact solution approach is part of our ongoing research.
Acknowledgements
Dr. Mohamed Haouari would like to thank Fatimah AlnijrisResearch Chair for Advanced Manufacturing Technology for thefinancial support provided for this research.
References
[1] Blazewicz J, Lenstra JK, Rinnooy Kan AHG. Scheduling subject to resourceconstraints: classification and complexity. Discrete Applied Mathematics1983;5:11–24.
[2] Artigues C, Demassey S, Neron E. Resource-constrained project scheduling:models, algorithms, extension and applications. Wiley; 2008.
[3] Lahrichi A. Ordonnancements: La notion de parties obligatoires et sonapplication aux probl�emes cumulatifs. RAIRO-RO 1982;16:241–62.
[4] Hidri L, Gharbi A, Haouari M. Energetic reasoning revisited: application toparallel machine scheduling. Journal of Scheduling 2008;11:239–52.
[5] Stinson J, Davis E, Khumawala B. Multiple resource constrained schedulingusing branch and bound. AIEE Transactions 1978;10:252–9.
[6] Carlier J, Latapie B. Une methode arborescente pour resoudre les probl�emescumulatifs. RAIRO-RO 1991;25:311–40.
[7] Baptiste P, Le Pape C, Nuijten W. Satisfiability tests and time boundadjustments for cumulative scheduling problems. Annals of OperationsResearch 1999;92:305–33.
[8] Kooli A, Haouari M, Hidri L, Neron E. IP-based energetic reasoning for theresource constrained project scheduling problem. Electronic Notes in Dis-crete Mathematics 2010;36:359–66.
[9] Christofides N, Alvarez-Valdes R, Tamarit J. Project scheduling with resourceconstraints: a branch and bound approach. European Journal of Operational
Research 1987;29:262–73.[10] Fekete S, Schepers J. New classes of lower bounds for bin-packing problems.
In: Lecture notes in computer science, vol. 1412; 1998. p. 257–70.[11] Haouari M, Gharbi A. Fast lifting procedures for the bin packing problem.
Discrete Optimization 2005;2:201–18.[12] Carlier J, Clautiaux F, Moukrim A. New reduction procedures and lower
bounds for the two-dimensional bin packing problem with fixed orientation.
Computers & Operations Research 2007;34:2223–50.[13] Tercinet F, Neron E. Energetic reasoning and bin-packing problem for
bounding a parallel machine problem. 4’OR 2006;4:297–317.[14] Brucker P, Knust S. A linear programming and constraint propagation based
lower bound for the RCPSP. European Journal of Operational Research2000;127:355–62.
[15] Kolisch R, Sprecher A, Drexl A. PSPLIB—a project scheduling library. EuropeanJournal of Operational Research 1997;96:205–16.
[16] Carlier J, Pinson E. Adjustment of heads and tails for the job-shop problem.European Journal of Operational Research 1994;78:146–61.
[17] Martin P, Shmoys DB. A new approach to computing optimal schedules forthe job-shop scheduling problem. In: Lecture notes in computer science,Integer programming and combinatorial optimization, Proceedings of the
fifth international IPCO conference, 1996.[18] Caseau Y, Laburthe F. Cumulative scheduling with task intervals. In: Maher
M, editor. Proceedings of the joint international conference and symposiumon logic programming. MIT Press; 1996. p. 363–77.
[19] Demeulemeester E, Herroelen W. Project scheduling: a research handbook.Kluwer Academic Publisher; 2002.
[20] Erschler J, Lopez P, Thuriot C. Raisonnement temporel sous contraintes deressources et probl�emes d’ordonnancement. Revue d’Intelligence Artificielle1991;5:7–36.




















