elektronika Daya
198
BAB I PENDAHULUAN 1.1 PENGGUNAAN ELEKTRONIKA DAYA Semakin meningkatnya pemanfaatan tenaga listrik dalam bidang industri terutama dalam sistem pengaturan bidang kelistrikan. Salah satu bidang utama dalam bidang teknik kelistrikan adalah bidang Elektronika Daya yang memiliki kemampuan yang sangat efektif dalam pengontrolan dari penggerak motor listrik Sistem elektronika daya merupakan gabungan dari daya, listrik, elektronika, dan sistem kontrol. Elektronika Daya sangat dapat dimanfaatkan dalam sistemrangkaian listrik statis dan sistem rangkaian listrik dinamis. Elektronika Daya telah dikembangkan dalam posisi teknologi modern seperti beberapa variasi sistem seperti, kontrol, pengontrolan cahaya, kontrol motor, kontrol suplay daya dan sistem transmisi arus searah. Hal-hal tersebut dapat dilihat pada tabel 1.1 Hubungan antara Elektronika Daya dengan daya listrik, elektronika, dan sistem kontrol dapat dilihat pada gambar 1.1 Peralatan Daya Listrik Statik dan Dinamik Perangkat elektronika dan Rangkaian Kontrol Analog Kontrol Digital
Transcript of elektronika Daya

BAB I
PENDAHULUAN
1.1 PENGGUNAAN ELEKTRONIKA DAYA
Semakin meningkatnya pemanfaatan tenaga listrik dalam
bidang industri terutama dalam sistem pengaturan bidang
kelistrikan. Salah satu bidang utama dalam bidang teknik
kelistrikan adalah bidang Elektronika Daya yang memiliki
kemampuan yang sangat efektif dalam pengontrolan dari
penggerak motor listrik
Sistem elektronika daya merupakan gabungan dari daya,
listrik, elektronika, dan sistem kontrol. Elektronika Daya
sangat dapat dimanfaatkan dalam sistemrangkaian listrik statis
dan sistem rangkaian listrik dinamis. Elektronika Daya telah
dikembangkan dalam posisi teknologi modern seperti beberapa
variasi sistem seperti, kontrol, pengontrolan cahaya, kontrol
motor, kontrol suplay daya dan sistem transmisi arus searah.
Hal-hal tersebut dapat dilihat pada tabel 1.1
Hubungan antara Elektronika Daya dengan daya listrik,
elektronika, dan sistem kontrol dapat dilihat pada gambar 1.1
Peralatan Daya
Listrik Statik
dan Dinamik
Perangkat
elektronika
dan Rangkaian
Kontrol Analog
Kontrol
Digital

Gambar 1.1 Hubungan antara Elektronika daya pada daya listrik,
elektronika, dan sistem kontrol
Rangkaian Elektronika Daya dapat diklafikasi dalam 4 tipe
secara umum
1. AC/DC Converter
a. AC/DC Converter ( Uncontroller Rectifier )
b. AC/DC Converter ( Controller Rectifier )
2. AC/AC Converters ( AC Voltage Controllers )
3. DC/DC Converters ( DC Chopper )
4. DC/AC Converters ( Inverter )
Sistem blok suatu elektronika daya dengan beban-beban ( Motor,
Lampu, R,L,C ) dapat dilihat pada gambar 1.2
DC
AC
AC
AC
AC
DC
DC
DC

Keterangan :
1. Beban Motor AC
2. Beban Motor DC
3. Beban RLC
4. Beban Lampu
Gambar 1.2 Sistem blok Elektronika Daya dengan beban Motor,
Lampu, dan R,L,C
Tabel 1.1 BEBERAPA PEMANFAATAN ELEKTRONIKA DAYA
ADVERTISINGAIR CONDITIONINGAIRCRAFT POWER SUPPLIESALARMSAPPLIANCESAUDIO AMPILIFIERSBATTERY CHARGESBLOWERSBURGLAR ALARMCEMENT KILNCHEMICAL PROCESSINGCLOTHES DRYERSCOMPUTERSCONVEYERSCRANES 2 NOISTS
DIMMERSDISPLAYSELECTRIC BLANKETSELECTRIC DRYERSELECTRIC FANSELECTRIC VEHICLESELECTROMAGNETELECTRO PLATINGELECTRONIC IGNITIONELECTROSTATIC PRECIPITATORSELEVATORSFANSFOOD MIXERSFOOD WARMERSFLASHERS

FORKLIFT TRUCKSFURNACESGAMESGARAGE DOOR OPENERSGAS TURBINE STARTINGGENERATOR EXCETERSGRINDERSHAND POWER TOOLSHEAAT CONTROLHIGH FREQUENCY LIGHTINGHIGH VOLTAGE DCINDUCTION HEATINGLASER POWER SUPPLIERSLATCHING RELAYSLIGHT DIMMERLIGHT FLASHERSLINER INDUCTION MOTOR CONTROLSLOCOMOTIVESMAGNETIC RECORDINGMACHINE TOOLSMAGNETSMERCURY ARC LAMP BALLASTMININGMODEL TRAINSMOTOR CONTROLSMOTOR DRIVERSMOVIE PROJECTORSNUCLEAR REACTORS CONTROLDILWELL DRILLINGOVEN CONTROLSPAPER MILLSPARTICLE ACCELERATORPEOPLE MOVERSPHONGGRAPHSPHOTO COPIESPHOTOGRAPHIC SUPPLIES
POWER SUPPLYPRINTING PRESSPUMPS DAN COMPRESSORRADAR DAN SONAR POWER SUPPLYRANGE SURFACE UNITREFRIGERATOR POWER SUPPLIESREGULATORSRF-AMPSECURITY SYSTEMSEWING MACHINESSOLAR POWER SUPPLYSOLID STATE CONVACTORSSOLID STATE RELAYSSPACE POWER SUPPLYSTATIC SIRCUIT BREAKERSTATIC RELAYSTEEL MILLSSYNCHRONOUS MACHINE STARTINGSYNTETICS FIBERSTELEVISION CIRCUITSTEMPERATUR CONTROLTIMERSTV DEFLECTIONULTRASONIC GENERATORSUPSVACUM CLEANERSV.A.R COMPENSATIONVENDING MACHINEVLF TRANSMITTERVOLTAGE REGULATORSWASHING MACHINEWELDINGPLC : PROGRAMABLE LOGIC CONTROLDC-PM MOTOR APPLICATIONCNC-MACHINE CONTROL
CONTOH SEDERHANA
I. AC/DC CONVERTERS
a. AC/DC CONVERTER (Uncontroller Rectifier)
Rl
D1
D2
Vs
t
Vs

b. AC/DC CONVERTER (Controller Rectifier
II. AC/DC CONVERTER (Controller Rectifier)
III. DC/DC CONVERTER (CHOPPER)
Rl
D1
D2
t
Rl
T1
T2
Vs
t
t
Rl
TRIAC
Vs
t
t
Vs
tt T

IV. DC/AC CONVERTER (INVERTER
1.2 PERANGKAT SEMIKONDUKTOR DAYA
T1
D1 Rl
DC SUPPLY
t
Vs
t T
DC SUPPLY
Q1
Q2
Q3
R1
tTT/2
Vs
tT/2
TVs
tTT/2
Vs

Sejak tahun 1970 beberapa tipe dari perangkat semikonduktor
daya dibuat dan menjadi sangat komersial dibagi dalam 4 tipe :
1. Dioda Daya
2. Thyristor
3. Power Bipolar Junction Transistor (BJT)
4. Power Mosfet
Thyristor dapat dibagi atas tipe-tipe
a. Forced commutated thyristor
b. Line commutated thyristor
c. Gate turn off thyristor
d. Reverse conducting thyristor
e. Static induction thyristor
f. Gate assisted turn off thyristor
g. Light activated silicon controlled rectifier
Pada table 1.2 memperlihatkan konfigurasi beberapa piranti
semikonduktor daya
Pada table 1.3 memperlihatkan karakteristik v.1 dan symbol
dari piranti semikonduktor daya yang dipakai secara umum.
Tabel 1.2 rating dari perangkat-perangkat semikonduktor daya
TIPEVOLTAGE/CURRENTRATING
SWITCHINGTIME (MS)
ON VOLTAGEAND CURRENT
DIODA
Generalreverse
High speedSchottky
3000 V /3500 A
3000 V /1000 A
400 / 60 A
-2 – 50,23
1,6 V / 10KA2 V / 3000KA0,58 V / 60 A
FORCED TURNOFF
THYRISTOR
ReverseblockingHigh speedReverse
3000 V/1000A1200V/1500A2500V/400A2500V/1000A
400204040
2,5V/10KA2,1V/4500A2,7V/1250A2,1V/1000A

blockingReverse
conductingGattLight
triggered
1200V/400A6000V/1500A
8200-400
2,8V/1250A2,4V/4000A
TRIAC 1200V/300A 1,5 V / 420 A
SELF TURNEDOFF
THYRISTOR
Gto sith 3600 V / 600A
4000 V/ 2200A
256,5
2,5 V / 1000A2,3 V / 400 A
POWERTRANSISTOR
SingleDarlington
400 V / 250A
400 V / 40 A630 V / 50 A900 V / 200A
961,740
1 V / 250 A1,5 V / 49 A0,3 V / 20 A
2 V
STT - 1200 V/ 10 A 0,55 1,2 OHM
POWERMOSFET
- 500 V / 8,6A
1000 V / 4,7A
500 V / 10 A
0,70,90,6
0,62
0,4
RANCANGAN DARI POWER ELECTRONICS EQUIPMENT
Dalam perancangan peralatan elektronika dapat dibagi kedalam 4
bagian utama
1. Rancangan dari rangkaian daya
2. Proteksi dari piranti daya
3. Perhitungan dari strategi control
4. Rancangan dari logic dan rangkaian gatenya
Bagaimanapun, suatu rancangan, dengan analisis sederhana
dari suatu rangkaian adalah sangat berguna untuk dimengerti
cara kerja rangkaian dan menetapkan karakteristik dan strategi
control. Cara kerja dari Konverter daya didasarkan pada saklar
dari piranti semikonduktor daya dan sebagai suatu hasil dari
arus dan tegangan harmonic kedalam system sumber dan pada

keluaran converter. Hal tersebut yang dapat muncul persoalan
distorsi pada tegangan output, generasi harmonic ke system
supply dan interferensi dengan komunikasi dan rangkaian
signal. Secara normal diterapakan system filter kedalam input
dan output converter tersebut, untuk meredam harmonic.
Pada gambar berikut memperlihatkan blok diagram dari
converter secara umum
Gambar 1.4 Struktur Konverter Daya Secara Umum
Gambar 1.5 Struktur Konverter-konverter secara keseluruhan
(Multi-Converter)
Input
Filte
r
Power
Converter
Output
Filter
Switching Control
Signal Generator
~~
~=
==
=~
~ = = ~Motor AC Motor DC Motor DC Motor AC
AC AC DC DC AC

Sebagai Contoh
1. AC/AC Converter
Input : Output :
Tegangan Vi Tegangan V0
Arus Ii Arus I0
Frekuensi Fi Frekuensi F0
Daya Pi Daya P0
Vi = Vmi Sin (t) Vo = Vmo Sin (t)
Ii = Imi Sin (t) Io = Imo Sin (t)
~~
INPUT
OUTPUT
Vs
t
Vs
t
Vo
Io
Vo
Io

KESIMPULAN
Sebagai suatu teknologi untuk piranti semikonduktor daya
dan pengembangan rangkaian terintegrasi. Pentingnya untuk
pemanfaatan elektronika daya menjadi sangat luas. Telah banyak
sekali piranti elektronika daya yang secara konvensioanl
sangat mampu dan pengembangan bidang ini sangat berlanjut
terus. Konverter daya secara umum dikategorikan dalam (1)
AC/DC Konverter (Rectifier), (2) AC/AC Konverter, (3) DC/DC
Konverter, (4) DC/AC Konverter (Inverter). Rancangan rangkaian
elektronika daya dinginkan rancangan daya dan rangkaian
control. Tegangan dan arus harmonic yang dibangkitkan oleh
converter daya dapat dikurangi (meminimalkan) dengan pilihan
yang menguntungkan dengan strategi control.

BAB II
PIRANTI ELEKTRONIKA DAYA
2.1 PERANGKAT ELEKTRONIKA DAYA
Sejak perangkat utama elektronika daya dibuat dengan
teknologi yang sangat baik terutama pengaruh dari penemuan
dari perangkat konduktor daya. Maka sejak tahun 1970,
perangkat piranti seperti thyristor telah dipakai dengan
sangat spesifik dan efektif pada pemanfaatan terutama di
industry yang berkaitan dengan elektronika daya.
Sesuai dengan penemuan tersebut, maka piranti perangkat
utama dapat diklafikasi ke dalam 4 tipe yaitu : 1) Dioda Daya,
2)Thyristor, 3)Power Bipolar Junction Transistor (BJT), dan

4)MOSFET-Daya. Akibat perkembangan dengan pemanfaatan yang
sangat efektif, maka perangkat Thyristor diklafikasi ke dalam
7 tipe yaitu
1. Forced Commutated Thyristor
2. Line Commutated Thyristor
3. Gate Turn Off Thyristor (GTO)
4. Reverse Conducting Thyristor (RCT)
5. Static Induction Thyristor (SITH)
6. Gate Assisted Turn Off Thyristor (GATT)
7. Light Activated Silicon Controlled Rectifier (LASCR)
2.2 KARAKTERISTIK PIRANTI ELEKTRONIKA
a) Dioda
b) Thyristor

c) Transistor
d) MOSFET

2.3 KARAKTERISTIK KONTROL DARI PIRANTI DAYA
Piranti semikonduktor daya dapat di operasikan sebagai
sakelardengan menggunakan sinyal control pada terminal GATE
dari THYRISTOR. Keluaran yang diinginkan diperoleh dengan
variasi-variasi waktu konduktion dari saklar-saklar tersebut,
pada gambar berikut memperlihatkan tegangan keluaran dan
karakteristik control dari yang secara umum dipakai pada
perangkat-perangkat saklar daya.
Piranti-piranti saklar semikonduktor daya dapat
diklafikasi sesuai dengan sebagai berikut :
1. Uncontrolled Turn On and Off ( Contoh Dioda)
2. Controlled Turn On and Controlled Turn Off ( Contoh
SCR)
3. Karakteristik Controlled Turn On and Off ( Contoh :
BJT, MOSFET, GTO)
4. Continous Gate Sinyal Requirment (BJT, MOSFET)
5. Pulse Gate Requirement ( contoh : SCR, GTO )
6. Bipolar Voltage Withstanding Capability (SCR)
7. Unipolar Voltage Withstanding Capability (BJT, MOSFET,
GTO)

8. Bidirectional Current Capability (RCT, TRIAC)
9. Unidirectional Current Capability ( Dioda, SCR, GTO,
BJT, MOSFET)
2.4 TIPE-TIPE RANGKAIAN ELEKTRONIKA DAYA
Rangkaian elektronika daya dapat diklafikasi ke dalam 4 tipe :
1. a. AC-DC Uncontrolled Converters (Uncontrolled Rectifiers
= Diode Rectifiers)
b.AC-DC Converters (Controlled Rectifier)
2. AC-DC Converters (AC Voltage Controllers)
3. DC-DC Converters (DC Choppers)
4. DC-AC Converters (Inverters)
Contoh Sederhana
1.
a. AC – DC Uncontrolled Converters
Gambar 2.2.a
b. AC – DC Controlled Converters

Gambar 2.2.b
2. AC – AC Converter Single Phase
Gambar 2.3
3. DC – DC Converters ( DC – Chopper )

Gambar 2.4
4. DC – AC Converter ( Inverter )
Gambar 2.5
2..5 RANCANGAN DARI PERALATAN ELEKTRONIKA DAYA
Perencanaan peralatan elektronika daya dapat dibagi kedalam 4
bagian
1. Rancangan Rangkaian Daya
2. Pengamanan Piranti Daya
3. Perhitungan dari Strategi control
4. Rancangan Logik dan Rangkaian Gate
Input
Filte
r
Power
Coverter
Output
Filter
Switching
Control Sicnal
Generator
Sumber Daya

Gambar 2.6 Structur Umum Dari Converter Daya
Pada penjelasan sebelumnya, ada beberapa tipe rangkaian
elektronika-daya yang berupa uraian dan analisa dasar. Pada
analisa-analisa tersebut, perangkat daya diasumsikan sebagai
suatu saklar, dan berupa rangkaian efektif dari tahanan, dan
induktansi. Bagaimana pun rancangan awal suatu analisa yang
sederhana dari suatu rangkaian adalah sangat berguna dan
dimengerti. Cara kerja dari rangkaian dan menetapkan
karakteristik dan strategi control.
Sebelum prototype dibuat, rancangan dapat dianalisi dari
parameter-parameter rangkaian dan akan dimodifikasi rancangan
bila perlu.
2.6 KESIMPULAN
Suatu teknologi untuk piranti semikonduktor daya dan
membentuk rangkaian terintegrasi, maka potensi untuk
penggunaan elektronika daya menjadi sangat luas. Telah banyak
piranti semikonduktor daya yang komersial dengan baik.
Konverter daya yang secara umum terdiri atas 1) AC-DC
Converters, 2) AC-AC Converters, 3)DC-DC Converters, 4)DC-AC
Converters. Rancangan dari rangkaian Elektronika Daya
diharapkan dengan perencanaan daya dan rangkaian control.
2.7 PERTANYAAN
1. Berikan penjelasan tentang Elektronika Daya
2. Berikan uraian tentang komponen elektronika daya

3. Berikan uraian tentang prinsip AC-DC Converter
4. Berikan uraian tentang prinsip AC-AC Converter
5. Berikan uraian tentang prinsip DC-DC Converter
6. Berikan uraian tentang prinsip DC-AC Converter
BAB III
KONVERTER AC – DC
3.1 PENDAHULUAN
Piranti elektronika yang sangat luas pemakaiannya dalam
system penyearah ( AC/DC Converter ) adalah diode. Rangkaian
perangkat diode secara umum dipakai di elektronika daya untuk
proses signal dalam mengkonversi system AC ke system DC.
Konverter AC-DC secara umum dikenal sebagai suatu penyearah
(rectifier), dan penyearah diode menghasilkan tegangan
keluaran searah yang tepat dan ideal.
Suatu converter AC-DC dapat dianalisa dengan menginput
tegangan arus yang bersifat bolak-balik dan memiliki sifat
gelombang berharmonik atau tidak berharmonik. Sehingga
keluaran gelombang searahnya dapat berupa gelombang searah
yang berharmonik atau tak berharmonik, seperti pada gambar 3.1
DC
AC
ωt
V2V2
ωt
V2 V2

‘
Pemakaian AC/DC Converter digunakan pada Industri-industri,
Kontrol, Motor DC dengan Variable Speed
Tipe
1. Uncontrol Converter ( 1 Phasa, 2 Phasa,dan Multiphase )
2. Control Rectifier ( 1 Phasa, 2 Phasa,dan Multiphase )
Klasifikasi
1. Single Phase
2. Three Phase
3. Multi Phase
3.2 PENAMPILAN PARAMETER-PARAMETER
Nilai Rata-Rata Dari Tegangan Keluaran (Beban), Vdc
Nilai Rata-Rata Dari Arus Keluaran (Beban), Idc
ωt ωt
Gambar 3.1 Karakter Gelombang AC-DC

Daya Keluaran DC : Pdc = Vdc.Idc
Nilai Efektif Tegangan Keluaran Vrms
Nilai Efektif Arus Keluaran Irms
Daya Keluaran AC : Pac = Vrms.Irms
Efisiensi : η=PdcPac
Nilai Komponen Efektif dari komponen AC dari tegangan keluaran
Vac=√Vrms2−Vdc2
Faktor Bentuk (Form-Factor)
FF= VrmsVdc
Faktor Riak (Ripple Factor) :
RF= VacVdc
RF=√Vrms2−Vdc2
Vdc =√(VrmsVdc )2
+12=√FF2−12
Transform Utilization Factor : TUF
TUF=PdcVsIs
Displacement Factor
DF=cosϕ
Harmonic Factor :
A=(Is2−Ii2
Ii2 )1/2
=[(IsIi )2
−1]1 /2
Input power Factor :
PF= VsIiVsIs
cosϕ=IiIs
cosϕ

3.3 TEKNIK KOMUTASI THYRISTOR
Pendahuluan.
Suatu Thyristor secara normal membuat ON dengan
menggunakan sebuah pulsa sinyal gate. Ketika sebuah Thyristor
dalam keadaan konduksi tegangan turun 0,25 ke 2 volt. Ada
banyak teknik untuk mengkomutasi sebuah Thyristor, dibagi
dalam 2 tipe :
1. Natural Commutation
2. Forced Commutation
Natural Commutation.
Bila tegangan input adalah AC, arus thyristor menjadi nol
dan tegangan mundur muncul lewat thyristor. Piranti secara
otomatis menjadi off seharusnya terhadap sifat asli dari
tegangan sumber : ini disebut natural commutation atau Line
Commutation
Forced Commutation
Dalam beberapa rangkaian thyristor, tegangan input adalah
DC dan arus maju dari thyristor ditekan kezoo dengan menambah
rangkaian komutasi untuk mengoff kan thyristor, Cara ini
disebut forced commutation dan secara normal dipakai dalam DC-
DC converter dan DC-DC converter (Inverter). Ada beberapa
klafikasi
1. Self Commuttation
2. Impluse Commutation
3. Resonant Pulse Commutation

4. Complementary Commutation
5. External Pulse
6. Load Side Commutation
7. Line Side Commutation
T1 Rl
T1
c
LVm
t
2 t
Vm
t
t
Vs
Thyristor dengan natural commutation
V3=VL+VC=Ldidt
+1C∫1dt+Vc(t=0)
Initial Condition VC (t=0) i
i (t )=Vs√CL sinωmtVC (t )=Vs¿
ωm=1
√LC
t
Vs

Impulse Commutation
T1 Rl
T1
c
L
t
Tipe rangkaian dimana kapasitor voltage Vo
Bilamana T1 dinyalakan Arus mengalir dalam rangkaian
[Ldidt +1C∫idt+Vc(t=0)]=0
VC (t=0 )=−Vodani (t=0 )=¿0
maka persamaan memberi arus pada C
i (t )=Vo√CL sinωmtdan tegangan kapasitor C
VC (t )=−Vocosωmt
T1
Dm
T2
C
T1
Dm
T2
C
L
T3Vs
t
t
Vs

Contoh Soal :
Rangkaian komutasi mempunyai kapasitansi ¿20μF , L=25μH,initial tegangan kapasitor sama dengan tegangan inputV0=Vδ=200V1, Bila arus Im RA 50 = 200 A. Tentukan variasi dari
waktu tq
T1
Dm
T2
L
CT3
L
tc=i+im
Vc=1C∫
icdt+VC (t=0)=−L1didt=−L1
didt
¿¿
V0=1C∫0
tqImdt=
ImtqC
tq=V0CIm
Im=arusbebankonstan
T1
Dm
T2
L
C

Initial condition IC (t=0 )=Im
dan VC (t=0 )=−V1=−Vs=−Vs
ic (t )=V0√ CL1sinω1t+Imcosω1t
VC (t )=Im√L1C sinω1t+Imcosω1t
dimana ω1=1
√L1C bila VC (t=tq )=0
tq=√CL1tan−1 ¿
C L1 V0 Im tq
20 μF 25 μH 200 V 50 A 29,0 μs
20 μF 25 μH 200 V 100 A
23,7 μs
20 μF 25 μH 200 V 200 A
16,3 μs
3.3.3 RESONANT PULSE COMMUTATION
T1
C L
T2
T3
Dm
t
Vs

:
Bila T2 menyala, rangkaian resonant di bentukoleh C1 T1 dan T2
Arus resonant
i (t )=v0√CL sinωmt tq=CV1
Im
¿IPsinωmt
pada saat i (t=t1 )=−v0cosωmt t1=√LCsin−1¿)
Vc (t=t1 )=−V1=−V0cosωmt1
Contoh :
Rangkaian komutasi pulsa resonant C = 30 μF, L = 4 μH, Initial
tegangan kapasitor V0 = 200 V, Hitung waktu pembukaan tq bila
arus dalam Im --- a) 250 A, b) 50 A
a) Im = 250 A t1=√4x30sin−1(250200 √ 430 )=5,192μs
ωm=1
√LC = 91.287,1 rad/det
ωmt1=0,474rad
t

V1=200cos (0,474 )=177,95V dari persamaan tq=CV1
Im
tq=177,95x30200
=21,35μs
b) Im = 50 A
t1=√4x30sin−1( 50200 √ 430 )=1,0095μs
ωm=1
√LC = 9.287,1 rad/det
ωmt1=0,0914rad
V1=200cos (0,0914 )=199,16Vdari persamaan tq=CV1
Im
tq=199,16x30250
=119,5μs
3.3.4 Complimentary Commutation
C
R1 R2
T1 T2

V3=1C∫idt+VC (t=0 )+Ri
Bila VC (t=0 )=−V0=Vs
i (t )=2VRe
−tRC
Vc
Vs
t
t
t
t

Vc (t )=Vs(1−2e−tRC )
VC (t=tq )=0 tq=RCln(2)
3.4AC/DC CONVERTER
1. AC/DC Uncontrolled Converter
2. AC/DC Controlled Converter
1.1 Single Phase Half Wave Rectifier
D1
2
-Vm
t2
VD
t
t
Vm
t
VmVS
Vl
i2
2

I. Analisis
a. Diketahui : Beban R, f = 1/T
ω=2πf, Vs=Vmsinωt
b. Ditanyakan
1. Efisiensi = 𝛈
2. Form Factor = FF
3. Ripple Factor = RF
4. Transform Utilitation Factor = TUF
5. Peak Invers Voltage = PIV
II. Rencana
Vdc=1T∫VL (t)dt=
1T∫0
T2
Vmsinωtdt
¿−Vm
Tω¿
IDC=VDC
R=0,318
Vm
Rf=1 /T ω=2πf
Vrms=[1T∫0T
VL2 (t)dt]
1 /2
Bila VL (t )=Vmsinωt untuk 0≤t≤T /2
Nilai efektif dari tegangan keluaran
Vrms=¿¿
III. Penyelesaian

1. Pdc=VdcIdc=(0,318Vm )2/R; Pac=VrmsIrms=(0,5Vm )2/R
Efisiensi ¿η=Pdc
Pac =
(0,318Vm )2
(0,5Vm)2 =40,5%
2. Form Factor = FF=Vrms
Vdc=
0,5Vm
0,318Vm=1,57=157%
3. Ripple Factor = RF=√1,572−1=1,21=121%
4. TUF=Pdc/VsIs tegangan efektif sekunder trafo adalah
Vs=¿¿
Arus efektif dari sekunder trafo sama dengan arus beban
= IS = 0,5 Vm/R, TUF = (0,318 Vm)2/R / (0,707 Vm) (0,5
Vm)R = TUF = 0,3182 / (0,707x0,5) = 0,286
5. PIV = Vm
3.5 RANCANGAN DAN RANGKAIAN KONVERTER
Dalam hal control REC,, rating arus dari piranti
tergantung pada sudut delay. Rating dari piranti daya harus
dirancang berdasarkan kondisi kasus – jelek, dan ini terjadi
ketika converter mendapat tegangan keluaran rata-rata max
(Vdm)
Keluaran converter berisi harmonic dan tergantung pada
Kontrol sudut, dan kondisi jeleknya berlaku terhadap tegangan
output minimum, maka input/output filter harus dirancang atas
kondisi tegangan keluaran minimum
3.6 KESIMPULAN
Tegangan keluarann rata-rata (daya) dari AC-DC terkontrol
converter dapat dikontrol dengan berbagai waktu konduksi dari

thyristor, tergantung dari tipe-tipe sumber, converter dapat
dalam bentuk 1 fasa, 3 fasa, dan setiap tipe bias dalam bentuk
½ gelombang.
Setengah dan semi serta full converter 3 phasa dipakai
untuk daya dan tegangan tinggi factor daya masukan yang
tergantung pada beban dan dapat diperbaiki, serta rating
tegangan dapat dinaikkan.

BAB IV
KONVERTER AC/AC
4.1 PENDAHULUAN
Suatu switch thyristor dihubungkan antara sumber AC
dengan beban yang mengalir dapat dikontrol dengan berbagai
nilai tegangan rms-nya yang digunakan ke beban.Tipe rangkaian
daya ini dikenal sebagai AC Voltage Controllers.Pemakaian AC
Voltage Controllers kebanyakan digunakan pada industrial
heating,load transformer tap charging,light control,speed control of
polyphase,induction motor and AC magnet control.
Ada 2 tipe control secara umum dipakai yaitu :
1. ON-OFF Control
2. PHASE ANGEL Control
AC Voltage Control diklarifikasikan kedalam 2 tipe yaitu :
1. Single phase controllers
2. Three phase controllers
Kedua tipe ini masing-masing dibagi atas :
a. Unidirectional atau Half wave control
b. Bidirectional atau Full Wave Control
4.2 PRINSIP KONTROL ON-OFF

Prinsip control On-Off dapat dijelaskan dengan sebuah
pengendali gelombang penuh atau satu fasa seperti yang
diperlihatkan pada gambar 4.1(a). Saklar thyristor
menghubungkan sumber AC dengan beban untuk tn, saklar ditutup
dengan sebuah gerbang penghambat pulsa untuk to waktu On, tn,
biasanya terdiri dari sejumlah integral siklus. Thyristor akan
On pada tegangan nol melalui tegangan masukan AC. Pulsa-pulsa
gerbang untuk thyristor T1 dan T2, dan bentuk gelombang masukan
dan keluaran diperlihatkan pada gambar 4.1(b).
Persamaan matematis :
Vs=Vmsint (4.1)
Untuk dibeban is connected n cycle disconnecting m cycle
Vo=[ n2π(n+m)
∫0
2π
2Vs2sin2ωt.d (ωt )]
1 /2
(4.2)
¿Vs√ nn+m
=Vs√K, K=Duty Cycle
n = Switch On
m = Switch Off

Gambar 4.1 Kontrol ON-OFF
Arus Maksimum Thyristor,
Im=¿
Vm
R¿ (4.3)
Im=
n2π (n+m )
∫0
π
Imsinωt .d (ωt)
¿Imn
π (n+m )=K.Imπ
(4.4)
Arus rms dari thyristor,
Ir=[ n2π(n+m)
∫0
πImsinωt.d (ωt)]
1/2
¿Im2 √ n
(n+m )=Im√K2
(4.5)
Contoh 4.1 :
Suatu AC Voltage Controller beban R= 10 Ohm, tegangan input
rms 120V 60Hz, dengan m=75 dan n=25 cyclus. Hitunglah :

a. Tegangan Output rms
b. Daya output
c. Power factor
d. Arus rms
e. Peak thyristor maximum current dan rms current
Jawab :
Diketahui :
Vs = 120V, f=60Hz
R = 10 ohm
m= 75 cyclus; n= 25 cyclus
Ditanyakan :
a. Vo (rms) = ……..?
b. Po = ……..?
c. PF = ……..?
d. Io = ……..?
e. Im,IR = ……..?
Penyelesaian :
Vm=√2.120=169,7V
K=n
n+m=
2525+75
=25100
=0,25
Maka :
a. Vo (rms )=Vs√K
¿120√0,25=60V

Io (rms )=Vo(rms)
R=6010
=6Ampere
b. Po=Io2.R=62.10=360Watt
c. PF=Po
VA,dimanaVA=Vs.Is=120x6=720Watt
¿ 360720=0,5lagging
AtauBisajugaPF=√K=√0,25=0,5
d. Io (rms )=6Ampere
e. The peak Thyristor
Im=Vm
R=169,7V
10=16,97A
Im=n
2π (n+m )∫0
π
Imsinωt.d (ωt)
¿Imn
π (n+m )=K.Imπ
0,25x16,97π
=1,35A
Arus rms Thyristor,
IR=[ n2n(n+m)
∫0
π
Imsinωt.d(ωt)]1 /2
¿Im2 √ n
(n+m )=Im√K2

¿(16,97 )√0,25
2=4,24A
4.3 PRINSIP KONTROL FASA (Phase angel Control)
Prinsip control fasa dapat dijelaskan berdasarkan gambar
4.2(a). Energi yang mengalir kebeban dikontrol dengan menunda
sudut tembak thyristor T1. Gambar 4.2(b) mengilustrasikan
pulsa-pulsa gerbang thyristor T1 dan bentuk gelombang tegangan
masukan dan keluarannya. Dengan adanya diode D1, daerah hanya
dapat bervariasi antara 70,7% dan 100%
Tegangan keluaran dan arus masuk tidak simetris mengandung
komponen DC. Jika ada sebuah trafo masukan akan dapat
menyebabkan masalah kejenuhan. Rangkaian ini adalah pengendali
setengah gelombang satu fasa dan cocok hanya untuk beban
resistif berdaya rendah, seperti pemanasan dab pencahayaan,
karena aliran daya dikontrol oleh setengah gelombang positif
tegangan masukan, jenis pengontrol ini dikenal juga dengan
pengontrol banyak arah(Unidirectional).
Persamaan matematis :
Vs=Vmsinωt
(4.6)
¿√2Vssinωt
Delay angel T1 --- t=α
Rms output voltage,

Vo=( 12π [∫α
π2Vs2sin2ωt.d (ωt)+∫
α
2πsin2ωt.d(ωt)])
1 /2
¿( 12π [∫α
π(1−cos2ωt ).d (ωt)+∫
α
2π(1−cos2ωt).d(ωt)])
1/2
(4.7)
¿Vs[ 12π (2π−α+sin2α
3 )]1 /2
GAMBAR 4.2 KONTROL SUDUT 1 FASA

Nilai tenggangan output rata-rata,
Vdc=( 12π [∫απ2Vs2sin2ωt.d (ωt )+∫
α
2π
√2Vs2sin2ωt.d (ωt)])1 /2
(4.8)
¿2Vs
2π(cosα−1)
Contoh 4.2 :
Single phase AC Voltage controller R=10 Ohm, tegangan input
Vs=120V,60Hz,delay angle T1 α=π/2.Hitunglah :
a. Vo(rms) = …….?
b. PF input = …….?
c. Vdc (Average) = …….?
d. Idc = …….?
Jawab:
Diketahui :
Vs = 120 V, f=60Hz
R = 10 Ohm
α = π/2
Dintanyakan :
a. Vo(Rms) = …….?
b. PF input = …….?
c. Vdc (Average) = …….?
d. Idc (Avarage) = …….?
Penyelesaian :

a. V0 (rms )=120√34 ¿103,92V
b. PF-
I0 (rms )=V0 (rms )
R=103,9210
=10,392A
Load power,
P0=I02.R=(10,392)2.10=1079,94Watt
VA=Vs.I0=120x10,392=1247,04VA
PF=P0
VA=1079,941247,04
=0,866Lagging
c. Vdc = −120 √2π
=−27V
d. Idc = Vdc
R=−27
10=−2,7Ampere
Catatan :
Tanda negative berarti arus input selama setengah siklus
positif kurang dibandingkan arus masukan selama setengah
siklus negative. Jika ada sebuah masukan trafo, inti trafo
dapat terjadi saturasi. Pada prakteknya control unidirectional
ini tidak dapat digunakan.
4.4 Pengontrol Dua Arah Satu Fasa Dengan Beban Resitif
Masalah arus masukan DC dapat dicegah dengan menggunakan
control dua arah atau gelombang penuh.Pengontrolan satu fasa

gelombang penuh dengan beban resitif, rangkaiannya ditunjukkan
pada gambar 4.3(a). Selama tegangan masukan setengah siklus
positif, daya yang mengalir dikontrol oleh beberapa sudut
tunda dari thyristor T1, dan Thyristor T2 mengontrol daya
selama tegangan masukan setengah siklus negative. Pulsa-pulsa
yang dihasilkan pada thyristor T1 dan T2 terpisah 180o. Bentuk
gelombang tegangan masukan, tegangan keluaran dan sinyal
gerbang T1 dan T2 diperlihatkan pada gambar 4.3(b).
Gambar 4.3 pengontrol gelombang penuh 1 fasa

Persamaan matematis :
Vs=Vmsinωt
(4.9)
¿√Vssinωt
Delay angel T1 dan T2 -- α1 = α2 = α
Rms output Voltage,
V0=(2π [∫απ2Vs2sin
2ωt.d (ωt)])1 /2
¿(4Vs2
4π [∫απ
(1−cos2ωt).d (ωt )])1/2
(4.10)
¿Vs[ 1π (π−α+sin2α
2 )]1/2
Arus Beban rms,
Io (rms )=Vo(rms)
R(4.11)
VA = Vs.Is
Po=Io2.RWatt
Faktor Daya Input, PF
PF=Po
VA=V0
Vs=[ 1π (π−α+
sin2α2 )]
1 /2
(4.12)

Arus rata-rata Thyristor,
IA=1
2πR∫o
π
√2Vssinωt.d (ωt )
¿ √2Vs
2πRcos(α+1)
(4.13)

Arus rms thyristor,
IR=( 12πR2 [∫α
π2Vs2sin2ωt.d (ωt) ])
1/2
¿ [ 2V2
4πR2∫α
π(1−cos2ωt).d (ωt)]
1 /2
(4.14)
¿Vs
√2R [ 1π (π−α+sin2α
2 ) ]1/2
Contoh 4.3 :
Sebuah single phase full wave AC Voltage Controller dengan
beban resitif R=10 Ohm, tegangan input rms 120 V 60 Hz, delay
angel T1,T2 α1, α2, α=π/2. Hitungla :
a. Rms output voltage Vo
b. Input Power Factor, PF
c. Average Current Thyristor, IA
d. Rms current of thyristor, IR
Jawab :
Diketahui :
Vs = 120Volt, F=60Hz
R = 10Ohm
α = π/2
Ditanyakan :
a. Vo (rms) = ……..?
b. PF = ……..?

c. IA = ……..?
d. IR = ……..?
Penyelesaian :
a. Rms output Voltage,
Vo (rms )=120√2
=84,85Volt
b. Rms load current,
Io (rms )=Vo(rms)
R=84,8510
=8,485Ampere
VA=Vs.Is=120x8,485=1018,2VAPo=Io
2.R=(8,485)2.10=719,95Watt
PF=Po
VA=Vo
Vs=[1π (π−α+
sin2α2 )]
1 /2
¿ 719,951018,2=0,707lagging
c. Average Thyristor Current,
IA=1
2πR∫α
π
√2Vssinωt.d (ωt )
¿ √2Vs2πR
cos(α−1)
¿ √2x1202π.10
=5,7A
d. Rms Thyristor Current,
IR=( 12πR2 [∫α
π2Vs2sin2ωt.d (ωt) ])
1/2
¿(2Vs2
4πR2∫α
π(1−cos2ωt ).d (ωt))
1 /2
¿Vs
√2R [ 1π (π−α+sin2α
2 ) ]1/2

¿ 1202x10
=6A
4.5 Pengontrol satu fasa dengan beban Induktif
Telah diuraikan pengontrol satu fasa dengan beban resistif
pada bagian 4.4 pada prakteknya, hamper semua beban adalah
bersifat induktif. Pengontrol gelombang dengan beban RL
ditunjukkan pada gambar 4.4(a). Kita asumsikan bahwa Thyristor
T1 Firing pada waktu setengah siklus positif dan membawa arus
beban. Karena induktansi pada rangkaian, arus thyristor T1
tidak akan menuju nol pada t=π, ketika tegangan masukan mulai
menjadi negative, Thyristor T1 akan terus terhubung sampai
arus i1 jatuh menjadi nol pada t=β. Sudut konduksi thyristor
T1 adalah δ=β−α dan tergantung pada sudut tunda α dan sudutfactor daya beban θ. Bentuk gelombang dan pulsa-pulsa gerbangdiperlihatkan pada gambar 4.4(b).
Sinyal-sinyal gerbang thyristor dapat berupa pulsa-pulsa
pendek untuk pengontrol dengan beban resitif. Namun demikian
pulsa-pulsa pendek tersebut tidak cocok untuk beban induktif.
Sebagaimana diperlihatkan pada gambar 4.4(b). Ketika thyristor
T2 firing pada ωt=π+α, thyristor T1 masih terhubung karena
beban induksi. Pada saat arus thyristor T1 jatuh menjadi nol
dan T1 menjadi off pada ωt=β=a+δ, pulsa gerbang thyristor T2
telah berhenti dan mengakibatkan T2 tidak menjadi On. Hasilnya
hanya thyristor T1 akan beroperasi, yang mengakibatkan
gelombang tidak simetris pada arus dan tegangan keluaran.
Kesulitan ini dapat diatas dengan menggunakan sinyal-sinyal
gerbang yang kontinyu dengan masa durasi (π-α) seperti pada
gambar 4.4(c). Namun demikian,pulsa gerbang yang kontinyu akan

menyebabkan meningkatnya rugi saklar thyristor dan memerlukan
trafo isolasi yang lebih besar untuk rangkaian
gerbang.Biasanya digunakan pulsa-pulsa dengan durasi pendek
untuk mengatasi masalah ini seperti gambar 4.4(d).
Gambar rangkaian 4.4 pengontrol gelombang penuh 1 fasa bebanRL
Persamaan matematis :
Vs= VL + VR
¿L didt+R.i1 (t )=√2Vssinωt (4.15)

i1=√2Vs
Z.sin (ωt−θ)+A1e−tR /L (4.16)
Z=[R2+(ω )2 ]1/2,ωt=α,i1=0 (4.17)
A1=−√2Vs
Z .sin (ωt−θ ).e(RL )(
aw )
(4.18)
i1=√2Vs
Z[sin (ωt−θ)−sin (α−θ ).e
(RL
)(aw−t)] (4.19)
Sudut β,Saat i1 ke zero dan T1 ke off,didapat i1 (ωt=β )=0,
sin (ωt−θ ).e(RL)(α−
βω)
Dimana β=extending angel
V0 (rms )=( 22π [∫α
β2VS
2sin2ωt.d(ωt)])1 /2
¿¿¿ (4.20)
Vs=[ 1π (β−α+sin2β
2 )]1 /4
Arus rms thyristor,
IR=( 12π [∫α
βi12.d(ωt)])
1/2
¿Vs
Z¿¿ (4.21)
¿Vs
√2R¿¿

I0 (rms )=(IR2+IR2 )=√2.IR
(4.22)
Arus rata-rata thyristor,
IA=12π∫α
β
i.d(ωt)
¿ √2Vs
2πZ ∫α
β [sin (ωt)−sin (α−β )e(RL)( aw−t)]d.(ωt)
(4.23)
Catatan :
1. α=0,makasin (β−θ )=sin (β−α )=0;β−α=δ=π

2.θ<α<πBAB V
KONVERTER DC/DC (Chopper)
5.1 PENDAHULUAN
Pada banyak aplikasi industry, diperlukan untuk
mengubah sumber tegangan dc tetap menjadi sumber tegangan dc
yang bersifat variable. DC Chopper mengubah secara lansung
dari dc ke dc dan biasanya hal ini biasa disebut disebut
converter dc ke dc.Chopper dapat disebut sebagai dc, sama
dengan trafo ac dengan mengsuplai tegangan yang variable
secara terus menerus. Seperti trafo, chopper dapat digunakan
untuk menaikkan dan menurunkan sumber tegangan dc.
DC Chopper merupakan rangkaian yang mengkonversi input
DC yang tidak dikontrol ke output DC yang dikontrol dengan
tingkat tegangan yang diinginkan.Ada dua macam cara pengolahan
daya : tipe linier dan tipe peralihan(Switching).Tergantung
dari jenis aplikasinya, masing-masing tipe memiliki kelebihan
dan kekurangan.
Namun dalam perkembangannya, tipe peralihan Nampak
semakin terlihat kepopulerannya terutama karena kelebihannya
dalam mengubah daya secara jauh ebih efisien dan pemakaian
komponen ukurannya lebih kecil. Pengubah daya DC-DC (DC-DC
Converter) tipe peralihan dikenal juga dengan sebutan DC
Chopper.
DC Chopper dimamfaatkan terutama untuk penyediaan
tegangan keluaran DC yang bervariasi besarannya sesuai dengan
permintaan pada beban. Daya masukan dari proses DC-DC tersebut

adalah berasal dari sumber daya DC yang biasanya memiliki
tegangan masukan yang tetap.
Pada dasarnya, penghasilan tegangan keluaran DC yang
ingin dicapai adalah dengan cara pengaturan lamanya waktu
penghubungan antara sisi keluaran dan sisi masukan pada
rangkaian yang sama.Komponen yang digunakan untuk menjalankan
fungsi penghubung tersebut tidak lain adalah swith (Solid
State electronic switch) seperti misalnya
Thyristor,MOSFET,IGBT,GTO.
Chopper secara luas digunakan untuk mengkontrol
perputaran motor traksi pada automobile elektrik, mobil
trolley,kapal pengangkut, truk forklift dan lain-lain. Chopper
menghasilkan putaran yang baik, efisiensi yang tinggi dan
respons dinamik yang tepat.
Selain itu dapat pula digunakan untuk pengereman
regenerative pada motor-motor DC untuk mengembalikan energy
pada sumber, dan hal ini menghasilkan adanya penghematan
energy transportasi dengan adanya penghentian yang sering
dilakukan. Chopper digunakan pada regulator tegangan dc dan
juga digunakan pada penghubung dengan inductor,untuk
membangkitkan sumber arus dc,terutama untuk pembalik arus.
Secara umum ada dua fungsi pengoperasian dari DC
Chopper yaitu penaikan tegangan (step-up)dimana tegangan
keluaran yang dihasilkan lebih tinggi dari tegangan masukan,
dan penurunan tegangan(step-down) dimana tegangan keluaran
lebih rendah dari tegangan masukan.
5.2 PRINSIP KERJA DC CHOPPER

DC Chopper mempunyai Prinsip kerja diantara lain :
a. Prinsip kerja step-Down
Prinsip kerja step down dapat dijelaskan melalui gambar
5.1(a).Ketika saklar SW ditutup selama waktu t1,tegangan
masukan Vs muncul melalui beban.Bila saklar tetap off
selama waktu t2, tegangan melalui beban dan arus beban
juga ditunjukkan pada gambar 5.1(b)
Tegangan keluaran rata-rata diberikan oleh :
Vo=1T∫
0
t1Vodt=
t1
TVs=ftVs=kVs (5.1)
Dan arus beban rata-rata,
Ia=Va
R=kVs/R (5.2)
Dengan T adalah periode chopping, k=t1/T adalah duty cycle
chopper, dan f adalah frekuensi chopping. Nilai rms tegangan
keluaran ditentukan dari :
V0 (rms )=(1T [∫0kTvo2.dt])
1/2
(5.3)
¿√kVs
Pi=1T∫0
kTvo2.dt=
1T∫0
kT.Vo2
Rdt=k
Vs2
R(5.4)

Gambar 5.1 Chopper Step-down dengan beban resistif
Dengan mengasumsikan bahwa tidak ada rugi-rugi pada
chopper maka daya masukan pada chopper sama dengan daya yang
diberikan dengan, resistansi masukan efektif yang dilihat dari
sumber adalah :
R1=Vs
Iα=
Vs
kVs/R=Rk
(5.5)
Duty cycle k dapat divariasikan dari 0 sampai 1 dengan
bervariasi menurut t1, T dan f. Maka tegangan keluaran V0 dapat
divariasikan dari 0 sampai Vs dengan mengatur k, dan aliran
daya dapat diatur melalui :
1. Operasi pada frekuensi konstan.
Frekuensi chopping f(atau periode chopping T) dijaga tetap
dan waktu on t1 divariasikan. Lebar pulsa bervariasi dan
control jenis ini dikenal dengan nama control pulse-width-
modulation(PWM).

2. Operasi Pada frekuensi yang variable
Frekuensi chopping f bervariasi. Pada waktu on t1 atau pada
waktu off t2 dijaga tetap. Ini disebut modulasi
frekuensi.Frekuensi divariasikan untuk batasan yang lebar
untuk mendapatkan batasan tegangan keluaran yang penug.Kontrol
jenis ini membangkitkan harmonisa pada frekuensi yang tidak
bias ditentukan sehingga akan sangat sulit untuk merancang
filter.
Contoh 5.1 :
Chopper dc gambar diatas (Gambar 5.1), dengan nilai tahanan
R=10 Ohm, dan Vs=220V, Voltage drop 2V,Frekuensi chopping f=1
kHz, duty cycle 50%. Hitung :
a. Tegangan output rata-rata
b. Tegangan rms output
c. Efesiensi
d. Tahanan input efektif
e. Harga rms dari komponen fundamental dari teganga harmonic
keluaran
Jawab :
Diketahui :
R= 10 Ohm, Vs=220 V, Voltage drop=Vch 2 V, frekuensi
chopping
F= 1 kHz, Duty Cycle=k=50%=0,5
Dintanyakan :
a. V0 = ……….?
b. V0(rms) = ……….?
c. N = ……….?
d. Ri = ……….?

e. V0(t) = ……….?
Penyelesaian :
a. V0=kVs=(0,5 ). (220−2 )=109V
b. V0 (rms )=√kVs=¿
c. Daya Keluaran :
P0=1T∫0
kT.Vo2
Rdt=¿∫
0
kT.
(Vs−Vch)1 /2
Rdt=k
Vs−Vch
R¿
¿0,5 220−210
=2376,2Watt
Daya masukkan :
P1=1T∫0
kTVs.idt=∫
0
kT.Vs (Vs−Vch)
R dt=k Vs (Vs−Vch )R
¿0,5 (220 ).(220−2)
10=2398Watt
n=P0P1
=2376,22398
x100%=99,09%
d. Ri=Vs
Ia=
Vs
(k.V)2=Rk
= 100,5
=20Ohm=Ra
e. V0 (t )=kVs+Vs
n.π∑n=1
∞sin2nπkcos2nπft+
Vs
n.π∑n=1
∞¿¿¿¿¿
n=1,
V1 (t )=Vs
π¿
¿ 220−2π [sin (2π.1000t)]=140,06sin (6283,2t)
¿140,06
√2=99,04V
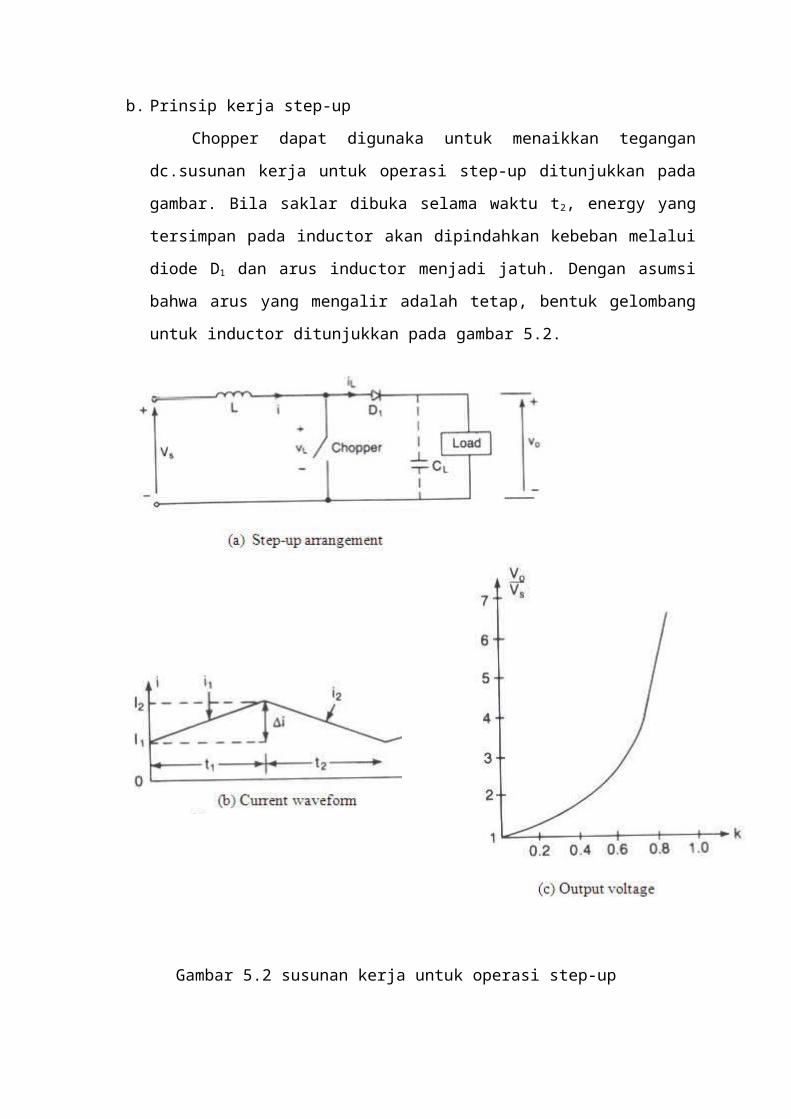
b. Prinsip kerja step-up
Chopper dapat digunaka untuk menaikkan tegangan
dc.susunan kerja untuk operasi step-up ditunjukkan pada
gambar. Bila saklar dibuka selama waktu t2, energy yang
tersimpan pada inductor akan dipindahkan kebeban melalui
diode D1 dan arus inductor menjadi jatuh. Dengan asumsi
bahwa arus yang mengalir adalah tetap, bentuk gelombang
untuk inductor ditunjukkan pada gambar 5.2.
Gambar 5.2 susunan kerja untuk operasi step-up

Bila chopper di On-kan, tegangan yang melalui inductor adalah ;
VL=Ldidt (5.6)
Dan ini memberika arus ripple puncak pada inductor,
∆I=VsLt1 (5.7)
Tegangan keluaran instantaneous adalah :
V0=Vs+L∆It2
=Vs(1+t1t2 )=Vs
11−k
(5.8)
Bila sebuah kapasitor CL dihubungkan dengan beban seperti
terlihat pada garis putus-putus pada gambar 5.3, Tegangan
keluaran akan tetap dan V0 akan menjadi nilai rata-rata Va.
Instantaneous bahwa tegangan yang melalui beban dapat
dinaikkan dengan memvariasikan duty cycle, k dan tegangan
keluaran minimum adalah Vs bila k=0.
Namun demikian chopper tidak dapat On terus- menerus
shingga k=1. Untuk nilai k yang cenderung menuju satu,
tegangan keluaran menjadi sangat besar dan sangat sensitive
untuk mengubah nilai k, seperti terlihat pada gambar 5.3(a).
Prinsip ini dapat diaplikasikan untuk memindahkan energy
dari satu sumber tegangan ke lainnya seperti terlihat pada

gambar 5.3(a). Rangkaian ekivalen untuk mode-mode operasi
ditunjukkan pada gmabar 3.11(c). Arus inductor untuk mode I
diberikan sebagai berikut.
Vs=Ldi1
dt(5.9)
Dan dinyatakan sebagai,
I1 (t )=Vs
Lt+I1 (5.10)

Gambar 5.3 susunan gelombang arus
Dimana i1 adalah arus mula untuk mode 1. Selama mode 1, arus
harus menungkat dan kondisi yang penting adalah,
didt
>0Untuk Vs>0
Arus untuk mode 2 diberikan sebagai berikut,
Vs=Ldi2
dt+E (5.11)
Dan penyelesaian adalah ;
i2 (t )=Vs−EL
t+I2 (5.12)
Dengan I2 adalah arus mula untuk mode 2. Untuk system yang
stabil, arus harus turun dan kondisi yang memenuhi adalah;
di2dt
<0danVs<E
Bila kondisi ini tidak memenuhi, arus inductor akan tetap
naik dan akan menjadi tidak stabil. Maka, kondisi untuk
pemindahan daya yang terkontrol adalah :

0<Vs<E
Persamaan (5.12) menyatakan bahwa sumber tegangan Vs,
Harus lebih kecil dari tegangan E agar transfer daya dari
sumber yang tetap (atau Variable) ketegangan DC tetap bias
dilakukan, pada pengereman elektris motor-motor dc, dengan
motor-motor bekerja sebagai generator dc, tegangan terminalnya
akan jatuh bila kecepatan mesin berkurang. Chopper dapat
memindahkan daya kesumber dc tetap atau rheostat.
Bila chopper di-on-kan, energy akan dipindahkan dari
sumber Vs ke inductor L. dan bila chopper di-off-kan sejumlah
energy yang tersimpan pada inductor akan dipindahkan ke
baterai E.
5.3 RANCANGAN RANGKAIAN CHOPPER
Yang paling diharapkan untuk rancangan ragkaian komtasi
adalah mendapat sesuatu yang memuaskan waktu turn-off untuk
mensaklar thyristor utama ke-off. Analisis-analisis dari
bentuk persamaan untuk chopper klasik, memperlihatkan bahwa
waktu turn-off tergantung pada tegangan kapasitor komutasi Vc.
Adalah sangatlah lebih sederhana merancang rangkaian
komutasi bila induktansi sumber dapat diabaikan atau arus
beban tidak tinggi, tetapi dikasus arus beban lebih tinggi
induktansi kesasar yang selalu muncul dalam praktek.
Induktansi sumber membuat persoalan rancangan non-linier dan
metode interactive diharapkan menghitung komponen komutasi

dari piranti daya tergantung pada induktansi seumber dan arus
beban.
Tidak ada aturan yang tetap untuk merancang rangkaian
chopper dan berbagai rancangan dengan tipe rangkaian yang
terpakai. Perancangan memiliki batasan-batasan luas dari
pilihan dan nilai komponen Lm, C. komponen dipengaruhi oleh
tegangan puncak dan tegangan yang diizinkan. Batas-batas
tegangan dan arus komponen Lm,C dan piranti memberikan batasan
maksimum.
Langkah-langkah dalam perancangan :
1. Identifikasi tipe-tipe operasi untuk rangkaian chopper.
2. Hitung rangkaian equivalen sesuai tipe.
3. Hitung arus dan tegangan sesuai tipe dan bentuk
gelombangnya.
4. Evaluasi nilai komponen komutasi Lm, C yang cocok
dengan batas rancangan.
5. Hitung batas tegangan dan arus dari komponen dan
piranti.
Kita dapat mencatat bahwa tegangan keluaran berisi harmonic-
harmonik, sehingga filter tipe C, tipe L dan LC bias
dihubungkan ke output yang diharapkan untuk mengurangi
keluaran harmonic.
Sebuah chopper dengan beban induktif yang tinggi seperti
ditunjukkan pada gambar 5.4. arus beban ripple diabaikan(∆I=0¿
. Bila arus beban rata-rata adalah Ia , arus beban puncak
adalah

inh (t )=kIa+Ianπ∑
n=1
∞sin2πk.cos2nπft+¿
Ianπ∑
n=1
∞(1−cos2πfk¿)sin2nπf ¿¿
(5.13)
Komponen fundamental (n=1), arus harmonis yang
dibangkitkan chopper pada bagian masukan diberikan,
iIh (t )=Iaπsin2πk.cos2πft+
Ia
π(1−cos2πk )sin2πft
(5.14)
Nilai Harmonis ke-n pada sumber dapat dihitung,
ins (t )= 11+(2πf)2LeCe
Inh=1
1+(nff0
)2
(5.15)
Gambar 5.4 bentuk gelobang arus masukan chopper
Dimana f adalah frekuensi chopper dan f0=1 /(2π√LeCe) adalahfrekuensi resosinansi system. Bila (f/f0) >>1, yang merupakan
kasus umum, arus hermonis ke-n pada sumber menjadi,

Ins=Inh( f0
nf ) (5.16)
Frekuensi chopping yang tinggi mengurangi jumlah elemen
filter masukan. Namun frekuensi harmonis yang dibangkitkan
oleh chopper pada sumber line juga meningkat, hal ini dapat
menyebabkan masalah interfensi terhadap sinyal control dan
komunikasi.
Gambar 5.5 Chopper dengan filter masukan

Gambar 5.6 rangkaian pengganti untuk arus harmonik
Contoh 5.2 :
Diinginkan merancang chopper komutasi impulse seperti
gambar rangkaian berikut (gambar 5.7), dioperasikan dengan
sumber tegangan Vs=220V dan arus beban puncak Im=440A. tegangan
keluaran minimum harus harus lebih kecil 5% Vs dan arus
resonansi puncak dibatasi menjadi 80% Im . waktu turn-off
diingkan Ioff = 25 μs dan induktansi sumber L=4μH. Hitunglah :a. Nilai komponen LmC
b. Frekuensi chopping maksimum yang diinginkan
c. Rating semua komponen dan divais asumsikan bahwa arus
ripple diabaikan.
d. Gambar 5.7 Chopper tiga thyristor impuls-commutated
Gambar 5.7 Chopper tiga thyristor impuls-commutated

Jawab :
Diketahui :
Vs = 220 V
Im = 440 A
Ioff = 25μsVo(min) = 0,05 x 220 = 11 V
L = 4μHDitanyakan :
a. LmC = ……?
b. Fchopping = ……?
c. Rating Komponen = ……?
Penyelesaian :
a. Waktu turn-off adalah :
toff=Vs.CIm
=(Vs+Im√Ls
C )CI=Vs.CIm
+√LC
Atau
(toff−Vs.CIm )
2
=t2off+( Vs.CIm )
2
−2V2.Ctoff
Im=LsC
Dengan mengsubtitusikan nilai : 25C2 – 29C + 625 = 0
didapatkan C=87,4 μF atau 28,6μF. Pilih nilai C terkecil yaitu28,6μF dibulatkan 30μF.
b. Tegangan lebih adalah ∆ V=440√ 430
=160V
Tegangan Kapasitor adalah Vc=Vs=220+160=380Volt
Arus resonansi puncak adalah :
Ip=380√30Lm=0.8x440=352

Atau Lm = 34,96 μHMisalkan nilai Lm = 35μH dan arus balik
tr=π√35x30=101,8μS,waktuturn−offmenjadi
toff=380x( 30440 )=25,9μsdandiperolehnilaitd=220x( 30440)=15μsdanwaktukomutasitc=25,9+15=40,9μs.
Frekuensi chopping dapat ditentukan melalui kondisi
tegangan minimum sebagai berikut :
¿∨¿f [(220x110,8 )+ (0,5x40,9)x (380+220 )x10−6 ]atauf=317Hz

Gambar 5.8 bentuk gelombang contoh 5.2
C. Penentuan rating peralatan dan piranti :
T1 : Arus rata-rata Iav = 440 A ( asumsi duty cycle k=1)
Arus puncak Ip = 440 + (0,8x 3340)=792 A
Arus rms maksimum karena beban Irms = 440 A
Arus rms karena resonansi balik.
BAB VI
DC/AC KONVERTER ( INVERTER )
6.1 PENDAHULUAN
Konverter DC/AC dikenal sebagai INVERTER. Fungsi suatu
inverter adalah merubah tegangan input DC ketegangan output AC

yang simetris dengan besar frekuensi tertentu. Tegangan
keluaran dapat berbentuk tetap atau variable dan pada
frekuensi tetap ataupun variable.
Inverter sebagain luas penggunaannya dalam industry :
Variabel Speed AC Motor Drives
Inducting Heating
Standby Power Supplies
Uninterrupted Power Supplies
Ballast Elektronik
Microwave Heating
Static VAR Generators
FACTS (Flexible AC Transmission System)
Filter Daya Aktif
Penyearah
Input Inverter bias berupa : baterei, fuell-cell dan sumber DC
lainnya.
Tipe keluaran :
1 fasa :
120 Volt, 60 Hz,
115 Volt, 400 Hz,
220 Volt, 50 Hz
3 fasa :
220/380 Volt, 50 Hz,
115/200 Volt, 400 Hz
120/208 Volt, 60 Hz
Inverter dapat diklasifikasikan ke dalam 2 tipe yaitu :

1. Inverter satu fasa
2. Inverter tiga fasa
Setiap tipe dibagi atas 4 kategori :
a. Pulse width modulation (PWM) inverter
b. Resonant inverter
c. Auxiliary commutated inverter
d. Complementary commutated inverter
Inverter dengan tegangan input tetap disebut Voltage-Fed
Inverter (VFI)
Inverter dengan arus input tetap disebut Current-Fed Inverter
(CFI)
Inverter dengan tegangan input terkontrol disebut Variable
DC Linked Inverter
6.2 PRINSIP KERJA INVERTER
Suatu inverter memiliki prinsip dasar yaitu mengkonversi
system arus searah ke system arus bolak-balik. Prinsip kerja
inverter seperti pada gambar 6.1(a) dimana terdiri dari 2
choppers. Bila hanya transistor Q1 menyala ON pada saat waktu
T0/2 maka tegangan instantenaous yang lewat dibeban Vo adalah
Vs/2. Bila transistor Q2 menyala ON pada saat waktu T0/2 maka
nilai – Vs/2 akan lewat beban. Maka rangkaian logikanya dapat
dirancang sesuai dengan Q1 dan Q2 tidak boleh dinyalakan ON
bersamaan waktu. Seperti pada gambar dengan beban R.

Tegangan beban V0 = Vs/2
Tegangan output rms :
Vo=[2¿ ∫0¿/2 Vs2
4.dt]
1/2
=Vs2
(6.1)
Tegangan output instantaneous dengan analisa fourir :
Vo= ∑n=1,3,5,..
∞ 2Vsnπ
sinωt (6.2)
Dimana ω = 2πf0
Untuk n = 1 → V1=2Vs√2π
=0,45Vs (6.3)
Transistor dapat diganti dengan GTO atau forced commutated thyristor
Gambar 6.1 Inverter Jembatan Setengah (Half-Bridge) satu fasa
6.3 PENAMPILAN PARAMETER INVERTER

Keluaran suatu inverter dalam prakteknya berisi harmonic-
harmonik, sehingga parameter unjuk kerja (Performance parameters)
suatu inverter adalah :
1. Harmonic factor (Faktor Harmonisa) HF, perbandingan komponen
tegangan pada harmonisa ke n dengan komponen dasar
tegangan.
2. Total Harmonic Distortion (THD) mengukur kedekatan bentuk
gelombang output terhadap bentuk komponen dasar.
3. Distortion Factor (DF) ukuran tingkat keefektifan dalam
menghilangkan harmonisa.
4. Lowest-Order Harmonisa (LOH), tingkat harmonisa terrendah yang
frekuensi terdekat ke frekuensi dasar dan amplitudonya
lebih besar atau sama dengan 3% dari komponen dasarnya.
Harmonic factor (HF) :
HFn= VnV1 (6.4)
Total harmonic distortion (THD) :
THD=1V1 ( ∑
n=1,2,3..
∞Vn2)
1 /2
(6.5)
Distortion Factor (DF) :
DF= 1V1 [ ∑
n=1,2,3..
∞
(Vnn2 )2]1 /2
(6.6)

DFn= VnV1n2 faktor didistorsi ke -n
Contoh 6.1 :
Sebuah inverter setengah jembatan (half-bridge) satu fasa
seperti Gambar 6.1 mempunyai beban resitif R = 2.4 Ω dan
tegangan input dc Vs = 48 volt, hitunglah :
a. Tegangan keluaran rms pada frekuensi fundamental (V1).
b. Daya keluaran inverter (P0).
c. Arus puncak dan arus rata-rata setiap transistor.
d. Tegangan puncak balik setiap transistor.
e. Total distorsi harmonic (THD).
f. Factor distorsi (DF).
g. Factor harmonic dan factor distorsi pada harmonic order
paling rendah.
Jawab :
Diketahui : R = 2.4 Ω
Vs = 48 V
Ditanyakan :
a. V1 = …..?
b. P0 = …..?
c. Ip = ……? Dan ID = ……? Setiap transistor.
d. VB = ……?

e. THD = …….?
f. DF = ……..?
g. Faktor harmonic dan factor distorsi pada harmonic order
paling rendah, V3 = ……?
Penyelesaian :
a. Dari persamaan (6.3),
V1=2Vs√2π
=0,45Vs=0.45. (48 )=21.6V
b. Dari persamaan (6.1),
Vo=Vs2
=482
=24V
Po= Vo2
R =2422.4=240W
c. Ip= VoR
=242.4
=10A
Karena setiap transistor membagi arus 50 % selama siklus
konduksi, maka arus rata-rata tiap transistor ID = 0.5 x
10 = 5 A
d. Arus balik puncak transistor VB = 2 x V0 = 2 x 24 = 48 V
e. Dari persamaan (6.5)
THD=1V1
( ∑n=1,2,3..
∞Vn2)
1/2
Dengan,
( ∑n=1,2,3..
∞Vn2)
1 /2
=(Vo2−V12)1 /2
=0.2176Vs
THD=0.2176Vs0,45Vs
=48.34 %

f. Dari persamaan (6.6)
DF= 1V1 [ ∑
n=1,2,3..
∞
(Vnn2 )2]1 /2
Dimana,
[ ∑n=1,2,3..
∞
(Vnn2 )2]1/2
=[( V3
3 )2
+(V5
5 )2
+(V7
7 )2
+…]1 /2
=0.01712Vs
DF=0.01712Vs0.45Vs
=3.804%
g. Faktor harmonic dan factor distorsi pada harmonic order
paling rendah, V3 = V1/3, HF3 = 1/3 = 33,33 % dan DF3 =
1/27= 3.704%
6.4 INVERTER JEMBATAN SATU FASA
Suatu inverter jembatan satu fasa seperti pada Gambar
6.2(a), terdiri dari 4 chopper. Bila Q1 dan Q2 ON bersamaan, Vs
muncul lewat beban, bila Q3 dan Q4 ON bersamaan, tegangan lewat
beban di reverse sebesar –Vs, perhatikan gelombangnya maka
tegangan output rms :
Vo (rms )=[2T∫0¿/2
Vs2.dt]
1 /2
=Vs (6.7)
Bila D1 dan D2 konduksi, energy kembali kesumber dc dan
dikenal sebagai feedback diodes. Gambar 6.2(c) diperlihatkan
bentuk gelombang dari arus beban untuk beban induktif.

Tegangan intantanaous dalam bentuk fourier :
Vo= ∑n=1,2,3..
∞ 4Vs
nπsinnωt (6.8)
Untuk n = 1, tegangan komponen fundamental V1 :
V1=4Vs
√2π=0,90Vs (6.9)
Gambar 6.2 Inverter Jembatan penuh satu fasa
a. Rangkaian
b. Bentuk Tegangan c. Bentuk Gelombang
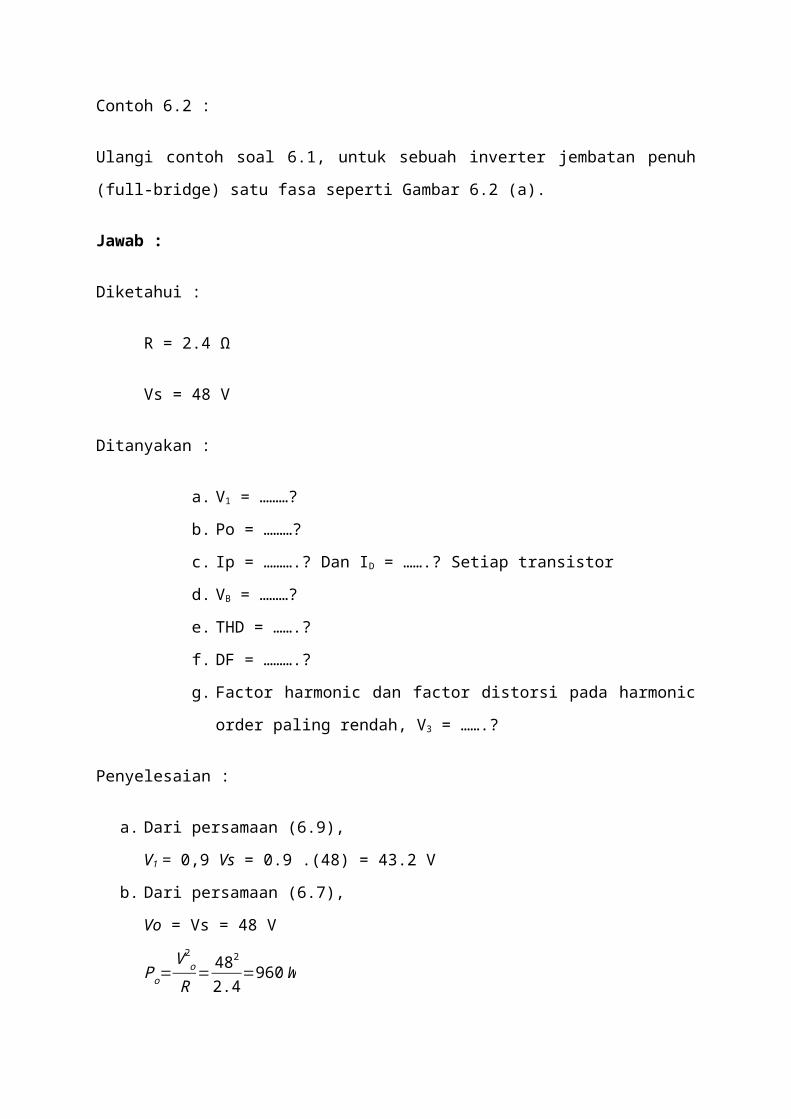
Contoh 6.2 :
Ulangi contoh soal 6.1, untuk sebuah inverter jembatan penuh
(full-bridge) satu fasa seperti Gambar 6.2 (a).
Jawab :
Diketahui :
R = 2.4 Ω
Vs = 48 V
Ditanyakan :
a. V1 = ………?
b. Po = ………?
c. Ip = ……….? Dan ID = …….? Setiap transistor
d. VB = ………?
e. THD = …….?
f. DF = ……….?
g. Factor harmonic dan factor distorsi pada harmonic
order paling rendah, V3 = …….?
Penyelesaian :
a. Dari persamaan (6.9),
V1 = 0,9 Vs = 0.9 .(48) = 43.2 V
b. Dari persamaan (6.7),
Vo = Vs = 48 V
Po=V2
o
R=4822.4
=960W

c. Ip=Vo
R= 482.4
=20A
Karena setiap transistor membagi arus 50 % selama siklus
konduksi, maka arus rata-rata tiap transistor ID = 0.5 x
20 = 10 A
d. Arus balik puncak transistor VB = 48 V
e. Dari persamaan (6.5),
THD=1V1
( ∑n=3,5,7..
∞Vn
2)1/.2
Dengan,
( ∑n=3,5,7..
∞Vn
2)1/2
=(Vo2−V1
2 )1/2=0.4352Vs
THD=0.4352Vs
0.9Vs=48.34%
f. Dari persamaan (6.6),
DF= 1V1 [ ∑
n=1,2,3..
∞ (Vn
n2 )2]1 /2
Dimana,
[ ∑n=1,2,3..
∞ (Vn
n2 )2]1 /2
=[(V3
3 )2
+( V5
5 )2
+(V7
7 )2
+…]1/2
=0.03424Vs
DF=0.03424Vs0.03424Vs
0.9Vs=3.804%

g. Factor harmonic dan factor distorsi pada harmonic order
paling rendah adalah harmonic ke-3, V3 = V1/3, HF3 = 1/3 =
33,33 % dan DF3 = 1/27 = 3.704 %
Catatan :
Tegangan puncak balik transistor dan kualitas tegangan untuk
inverter half-bridge dan full-bridge sama. Namun demikian
untuk inverter full-bridge dengan beban resitif, daya
outputnya empat kali lebih besar dan komponen fundamental dua
kali lebih dari inverter half-bridge.
6.5 INVERTER TIGA FASA
Inverter tiga fasa umumnya dipakai untuk penggunaan daya
tinggi. Inverter satu fasa penuh atau setengah dapat
dihubungkan parallel seperti Gambar 6.3.
Untuk beban delta-wye :
Untuk Beban Delta :
Tegangan phasa : tegangan line arus phasa diperoleh
secara langsung dari tegangan line to line, satu arus
phasa diketahui, arus line dapat dihitung.
Untuk Beban Wye :
Tegangan line dapat dihitung untuk arus line atau arus
phasa. Ada tiga mode untuk beban R tipe wye seperti gambar
6.5 (a)
Mode 1 ( 0 ≤ ωt ≤ π/3 ) :
Req = R + R/2 = 3R/2 (6.10)

i1=Vs
R=2Vs
3R(6.11)
Van=Vcn=i1R2
=Vs
3(6.12)
Vbn=−i1R=−2Vs3 (6.13)
Mode 2 ( π/3 ≤ ωt ≤ 2π/3 )Req = R + R/2 = 3R/2 (6.14)
i2=Vs
Req=2Vs
3R (6.15)
Van=i1R2
=Vs
3(6.16)
Vbn=−i2R=−2Vs3 (6.17)
Mode 3 ( 2π/3 ≤ ωt ≤ π )
Req = R + R/2 = 3R/2 (6.18)
i2=Vs
Req=2Vs
3R (6.19)
Van=Vbn=i3R2
=Vs
3(6.20)
Vbn=−i3R=−2Vs3 (6.21)
Gambar 6.5(b) dapat di ekspresikan ke dalam deret fourier
sebagai berikut :
Vab= ∑n=1,3,5..
∞ 4Vsnπ
cos nπ6sinn(ωt+
π6 ) (6.22)

Vbc= ∑n=1,3,5..
∞ 4Vsnπ
cos nπ6sinn(ωt−π
2 ) (6.23)
Vca= ∑n=1,3,5..
∞ 4Vsnπ
cos nπ6sinn(ωt−7π
6 ) (6.24)
Kita perhatikan persamaan (6.22), (6.23), (6.24) pada harmonic
kelipatan 3 ( n = 3, 9, 15…) diperoleh tegangan line-line sama
dengan nol, tegangan line-line rms, diperoleh :
VL=[ 22π ∫
0
2π/3
V2s.d(ωt)]1 /2
=√23 Vs=0.8165Vs (6.25)
Untuk n = 1 nilai rms komponen fundamental dari persamaan
(6.22) sebagai berikut :
Vl1 = 4Vscos30
0
2π=0.7797Vs (6.26)
Tegangan rms line-netral adalah :
Vp=Vl
√3 = √2Vs
√3=0.4714 (6.27)

Gambar 6.3 Inverter tiga fasa yang dibentuk dari tiga inverter
satu fasa

Gambar 6.4 Inverter Jembatan Tiga fasa

Gambar 6.5 Rangkaian ekuivalen hubungan wye
Contoh :
Suatu inverter tiga fasa seperti Gambar 6.4 mempunyai beban
resistif yang terhubung bintang (wye), R = 10 Ω, frekuensi
inverter 60 Hz dan tegangan input dc Vs = 220 V, a) uraikan
tegangan instantinous line to line, Vab (t) dan hitunglah b)
tegangan line rms VL, c) tegangan phasa rms, d) tegangan line
rms pada frekuensi fundamental, e) tegangan phasa rms pada
frekuensi fundamental, f) total distorsi harmonic, g) factor
distorsi, h) Faktor harmonic dan factor distorsi pada harmonic
order paling rendah, i) daya beban, P0, j) arus rata-rata
transistor dan arus rms transistor.
Jawab :
Diketahui :
R = 10 Ω
Vs = 220 V
f0 = 60 Hz
ω= 2.π x 60 = 337 rad/s
Ditanyakan :

a. Tegangan instantinous line to line, Vab (t) = …….?
b. V1 = ………?
c. Vp = ………?
d. VL1= ………?
e. Vp1= ………?
f. THD = …….?
g. DF = ……….?
h. Factor harmonic dan factor distorsi pada harmonic
order paling rendah, V5 = …….?
i. Po = ………?
j. ID = ………?
k. IR = ………?
Penyelesaian :
a. Tegangan instantinous line to line, Vab (t),
Vab (t) = 242.58 sin (377t + 30o) – 48.52 sin (377t + 30o)
-34.66 sin 7(377t + 30o) + 22.5 sin 11(377t + 30o)
+18.66 sin 13(377t + 30o) – 14.27 sin 17(377t + 30o) + ……
Tegangan phasa adalah Van (t )=Vab(t)
√3 dengan sudut delay
30o , sehingga arus phasa instantinous pada beban R = 10
ohm adalah,
Ia (t) = 14 sin(377t) – 2.801 sin 5(377t) – 2sin 7(377t)
11.273 sin 11(377t) + 1.007 sin 13(377t)…
0.824 sin 17(377t) +…

b. Dari persamaan (6.25),
VL = 0.8165Vs = 0.8165.(220) = 179.63 V
c. Dari persamaan (6.27),
Vp = 0.4714Vs = 0.4714.(220) = 103.7 V
d. Dari persamaan (6.26),
VL1 = 0.7797 Vs = 0.7797.(220) = 171.53 V
e. Vpl=VL1
√3=99.03V
f. Dari persamaan (6.26)
VL1 = 0.7797 Vs
( ∑n=5,7,11
∞Vn
2)1 /2
=(VL2−V1
2)1/2=0.2423Vs
THD=0.24236Vs0.7797Vs
=31.08%
g. [ ∑n=5,7,11…
∞ ( Vn
n2 )2]1/2
=[(V5
5 )2
+(V7
7 )2
+(V11
11 )2
+…]1/2
=0.00668Vs
DF=0.00668Vs0.7797Vs
=3.857%
h. Faktor harmonic dan factor distorsi pada harmonic order
paling rendah adalah harmonic ke 5, sehingga VL5 = VL1 / 5,
HF5 = 1/5 = 20% dan DF5 = 1/125 = 0.8%

i. Untuk beban yang terhubung wye arus saluran sama dengan
arus phasa dan arus line rms IL = Vp/10 = 103.7/10 = 10.37 A,
sehingga,
Po = 3.Vp.Ip = 3.(103.9).(10.37) = 3226.4 W
j. Ip=PoVs
=3226.4220
=14.67A
ID = 14.67/3 = 4.89 A
k. IR= IL√2
=10.37
√2=7.33A
6.6PENGENDALI TEGANGAN PADA INVERTER SATU FASA
Pada kebanyakan aplikasi industry, selalu diinginkan
untuk mengontrol tegangan keluaran dari inverter dengan maksud
:
1. Untuk mengatasi variasi tegangan input dc
2. Untuk regulasi tegangan inverter
3. Untuk tegangan dan frekuensi tetap
Ada beragam teknik untuk variasi keluaran inverter, namun
secara umum teknik yang digunakan adalah sebagai berikut :
1. Single pulse modulation
2. Multi pulse width modulation
3. Sinusoidal pulse width modulation
4. Modified sinusoidal pulse width modulation
5. Phase displacement control
6.6.1 Single Pulse Widht Modulation

Pada Single Pulse Widht Modulation hanya ada satu pulsa
persetengah siklus dan lebar pulsa divariasi untuk mengontrol
keluaran inverter. Gambar 6.6 diperhatikan bentuk gelombang
sinyal gerbang dan tegangan keluaran dari inverter jembatan
penuh satu fasa. Sinyal-sinyal gerbang secara umum
dibandingkan antara sinyal referensi (bentuk rectangular) pada
amplitude Ar, dengan sinyal pembawa (bentuk triangular) pada
amplitude Ac, Perbandingan antara AR dan AC adalah variable
control yang dikenal sebagai indeks modulasi (modulation
index/M).
M=Ar
Ac(6.28)
Tegangan output rms,
Vo=[ 22π ∫(π−δ)/2
(π+δ)/2
V2s.d(ωt)]
1 /2
=Vs√ δπ (6.29)
Tegangan output dalam deret fourier ,
Vo (t )= ∑n=1,3,5..
∞ 4Vs
nπsin nδ
2sinωt (6.30)

Gambar 6.6 Single Pulse Widht Modulation
6.6.2 Multi Pulse Widht Modulation
Keberadaan harmonic dapat direduksi dengan menggunakan
beberapa pulsa disetiap setengah siklus dari tegangan
keluaran. Secara umum sinyal gerbang untuk turn on dan turn off
ditunjukkan pada gambar 6.7(a). Tipe modulaasi ini juga
disebut Uniform Pulse Widht Modulation (UPWM). Jumlah pulsa per
setengah siklus dihitung :
N=fc
2fo(6.31)

Dengan fc adalah frekuensi carier / pembawa, fo adalah frekuensi
output dan N adalah jumlah pulsa per setengah siklus.
Variasi indeks modulasi M dari 0 sampai 1, variasi lebar pulsa
dari 0 sampai π/p dan tegangan keluaran dari 0 sampai Vs. Bentuk
tegangan keluaran dari Single Pulse Widht Modulation
ditunjukkan pada Gambar 6.7(b)
Jika δ adalah lebar setiap pulsa, maka tegangan-tegangan
keluaran :
Vo=[2p2π ∫(πp−δ)/2
(πp+δ )/2
V2s.d(ωt)]1/2
=Vs√pδπ (6.32)
Tegangan keluaran dalam deret fourier.
Vo (t )= ∑n=1,3,5…
∞
(Ancosnωt+Bnsinnωt) (6.33)

Gambar 6.7 Multiple Pulse Widht Modulation
Dengan koefisien,
An= ∑m=1…
p 4Vs
nπsin nδ
2cos (am+δ /2 ) (6.34)
Bn= ∑m=1…
p 4Vs
nπsin nδ
2sin (am+δ /2 )
(6.35)
6.6.3 Sinusiodal Pulse Width Modulation
Tipe modulasi ini umumnya digunakan pada aplikasi
industry dan dikenal dengan singkatan SPWM. Kelebihan tipe ini
disbanding dengan Multiple Pulse Widht Modulation adalah
factor distorsi dan harmonic order rendah tereduksi secara
signifikan. Bentuk gelombangnya ditunjukkan pada gambar 6.8.

Gambar 6.8 sinusiodal pulse width modulation
Tegangan keluaran dapat divariasikan dari 0 sampai Vs dengan
variasi indeks modulasi M dari 0 sampai 1. Seperti persamaan
(6.33) dikembangkan, sehingga tegangan keluaran rms,
Vo= Vs(∑m=1
p δmπ )
1 /2
(6.36)
Tegangan keluaran dalam deret fourier,
Vo(t)= ∑n=1,3,5…
∞
(Ancosnωt+Bnsinnωt) (6.37)
Dengan koefisien,
An= ∑m=1…
p 4Vs
nπ [sin (am+δm )−sinnam ] (6.38)

Bn= ∑m=1…
p 4Vs
nπ¿ (6.39)
6.6.4 Modified Sinusioadal Pulse Width Modulation
Tipe modulasi ini dikenal sebagai MSPWM dan bentuk
gelombang ditunjukkan pada gambar 6.9. Tipe ini modifikasi
dari karakteristik gelombang sinus dengan teknik SPWM yang
mana gelombang carrier diaplikasikan 60o selama interval
stengah siklus. ( contoh 0 ke 60o dan 120o ke 180o). Jumlah
pulsa q pada periode 60o secara normal berhubungan dengan ratio
frekuensi, pada inverter tiga fasa dirumuskan :
fcfo
=6q+3 (6.40)
Gambar 6.9 Modified Pulse Width Modulation

6.6.5 Phase Displacement Control
Pengendali tegangan bias didapatkan dari penggunaan multi
inverter dan penjumlahan tegangan keluaran pada masing-masing
inverter. Inverter jembatan penuh satu fasa yang telah
diuraikan sebelumnya dapat dikatakan sebagai penggabungan dua
inverter setengah jembatan. Gambar 6.10, menunjukkan tegangan
keluaran dan sebuah pergeseran phasa 180o dengan sudut tunda β.
Tegangan keluaran rms dapat dinyatakan sebagai :
Gambar 6.10 Phase Displacement Control
ωt
ωt
ωt
ωt
ωt
360o
360o
360o180o
180o
180o
180o
Vao
180o 360o
360o

Vo=Vs√βπ (6.41)
Vao= ∑n=1,3,5…
∞ 2Vs
nπsinnωt (6.42)
Vbo= ∑n=1,3,5…
∞ 2Vs
nπsinn (ωt−β )
(6.43)
Tegangan keluaran sesaat,
Vab=Va0−Vb0= ∑n=1,3,5…
∞ 2Vs
nπ¿ (6.44) Vab= ∑
n=1,3,5…
∞ 4Vs
nπsin nβ
2cosn (ωt−β /2 )
(6.45)
Nilai rms tegangan fundamental,
V1=4Vs
√2sin β
2(6.46)
Persamaan (6.46) mengindikasikan bahwa tegangan keluaran
dapat divariasikan dengan mengatur sudut delay β. Tipe
pengendalian ini secara khusus digunakan untuk aplikasi daya
tinggi dengan sejumlah transistor atau thyristor besar disusun
paralel.

BAB VII
MULTI KONVERTER AC-DC
7.1 PENDAHULUAN

Multi converter merupakan gabungan dari converter AC-DC,
converter AC-AC, Konverter DC-DC, dan koverter DC-AC yang
memiliki fungsi sebagai sumber AC dan sumber DC. Dalam hal
pemakaian sangat tergantung setiap beban, apakah bersifat
beban DC
Multi-konverter adalah salah satu bagian penggunaan
elektronika-Daya yang berhubungan dengan penggunaan piranti-
piranti converter, terutama dalam pemamfaatan dalam industry
dengan kapasitas yang luas. Pada gamabar berikut gambar 7.1
adalah pola system gambaran tentang ruang lingkup pemamfaatan
Multi-Konverter pada beban tertentu, terutama pada beban
Industri.
Gambar 7.1 Ruang Lingkup Multi-Konverter
Aliran Daya
Penyearah
Regulator AC
DC - CHOPPER
Penyearah
DC ke DC AC ke AC
DC ke ACAC ke DC
~= ~
=
~=~=

7.2 RUANG LINGKUP MULTI-KONVERTER
Dari ke 4 konverter dasar tersebut, maka untuk memproses
menjadi multi-konverter ada beberapa kemungkinan yang bias
dirancang seperti berikut
1. Konverter AC-AC = Konverter AC-DC
2. Konverter AC-DC = Konverter DC-DC
3. Konverter DC-DC = Konverter DC-AC
4. Konverter AC-AC = Konverter AC-DC = Konverter DC-DC
5. KOnverter AC-AC = Konverter AC-DC = Konverter DC-DC
= Konverter DC-AC
Dari ke-4 modul multi-konverter tersebut dapat
menghasilkan karateristik yang memiliki kapasitas daya yang
sesuai dengan beban, maka gambaran umum untuk multi converter
dapat dilihat pada gambar 7.2 berikut.
Gambar 7.2 Multi Konverter Daya Listrik
~~
~=
==
=~
~ = = ~Motor AC Motor DC Motor DC Motor AC

Dengan Proses dan kombinasi dari converter dasar yang 4
tipe tersebut, bila dikombinasi untuk siklus konversi daya
listrik dan dengan untuk beban yang dibutuhkan dapat dilihat
pada sirkulasi koversi daya-listrik pada gambar 7.3
Keterangan :
1. Beban Motor AC
2. Beban Motor DC
3. Beban RLC
4. Beban Lampu
DC
AC
AC
AC
AC
DC
DC
DC

Gambar 7.3 Gambaran Umum Multi Konverter untuk siklus konversi
daya listrik
Contoh 7.1
Suatu Konverter AC-AC dikonversi dengan converter AC-DC.
Tegangan Input pada converter AC-AC adalah Vs=V¿sinωt,
dihubung dengan beban R pada converter AC-DC, dimana R=10 Ohm.
Hitunglah :
a. Tegangan output converter AC-AC
b. Tegangan Output Konverter AC-DC
c. Daya output
d. Gambar diagram gelombang
Tegangan Input pada converter AC-AC
Vs=Vmsinωt=√2Vssinωt
Bila mana memiliki duty-Cycle K=√ nm+n
I. Analisis :
a. Diketahui : R= 10 Ohm
Vs= 120v, 60Hz
M= 75 Cycle, n=25 cycles
AC
~ ~~ ~AC
AC
DC
R

b. Ditanyakan :
1. (Vo)rms
2. PF
3. Irms
II. Rencana : K= n(n+m)
,Vo=Vs√R=Vs√ nm+n
Po=Io2R,VA=VsxIs,PF=Po /VA
PF=Po/VAIII. Penyelesaian:
a. Diposisi converter AC-AC
(Vo )rms=Vs√K=Vs√ nn+m
=120√ 2575+25
=60
(Io )rms=(Vo )rms
R =6010
=6A
b. Po=Io2R=62x10=360W
Input Volt ampere = VA=VsIs=VsxIo=120x6=720W
PF=360720
=0,5(lag)
BAB VIII

ELEKTRONIKA DAYA DALAM POWER SUPPLY
8.1 PENDAHULUAN
Power supply banyak dipakai secara intensif di industry,
kebanyakan memiliki spesifikasi sebagai berikut :
1. Mengisolasi antara sumber dan beban
2. Muatan daya tinggi untuk mengurangi ukuran dan berat
3. Pengontrolan arah aliran daya
4. Efesiensi konversi tinggi
5. Gelombang input/output dengan distorsi harmonic rendah
untuk filter kecil
6. Mengontrol factor daya jika sumber tegangannya AC
Power supply dapat dikategorikan kedalam 2 (dua) tipe yaitu :
1. Power Supply DC
2. Power Supply AC
8.2 POWER SUPPLY DC
Berdasarkan jenis teknik konversi dan arah pengendalian
daya, power supply DC dibagi kedalam 3 (tiga) tipe yaitu :
1. Switched-mode DC power Supply
2. Resonant DC Power Supply
3. Bidirectional DC Power Supply
8.2.1 Switched-Mode DC Power Supply

Switched-mode DC power Supply dapat dibagi menjadi 4 (empat)
kategori yaitu :
1. Flyback converter dan flyback converter with reset
winding
2. Push-pull converter
3. Half bridge converter
4. Full-bridge converter
Persamaan untuk rangkaian flyback reset winding
Voc=Vs(1+NpNr ) (8.1)
ar=NrNp
=1−kk (8.2)
Dimana Np adalah jumlah belitan primer transformator, Np adalah
jumlah belitan reset dan ar adalah ratio belitan.

Gambar 8.1 Konfigurasi Switched-mode DC power Supply
Konfigurasi push-full sebagaimana pada 8.1(c). Ketika
transistor Q1 turned on Vs muncul lewat setengah di primer
trafo, ketika Q2 turned on Vs lewat setengah yang lain dari
transformator. Tegangan diprimer bergerak dari -Vs ke Vs. Arus
rata-rata transformator idealnya adalah nol.
Tegangan output rata-ratanya adalah,
Vo=V2=Ns
NpV1=a.V1=aVs (8.3)
Transistor Q1 dan Q2 beroperasi 50% selama satu siklus
sehingga,
Tegangan rangkaian terbuka Voc = 2Vs,
Arus rata-rata dari transistor IA = Is/2
Arus puncak transistor Ip = Is
Rangkaian Half bridge converter ditunjukkan pada Gambar8.1(d). Ketika transistor Q1 turned on Vs/2 muncul lewat

setengah di primer trafo, ketika Q2 turned on, tegangan balikVs/2 lewat setengah diprimer trafo. Tegangan diprimer bergerakdari – Vs/2 ke Vs/2
Tegangan rangkaian terbuka Voc = Vs
Arus rata-rata dari transistor IA = Is
Arus puncak transistor Ip = 2 Is
Tegangan output rata-rata adalah,
Vo=V2=NsNpV1=a.V1=0.5aVs (8.4)
Rangkaian Full Bridge converter ditunjukkan pada Gambar8.1(e). Ketika transistor Q1 dan Q2 turned on, Vs lewatdiprimer trafo, ketika transistor Q3 dan Q4 turned on,transistotegangan balik primer sebesar –Vs.
Tegangan rangkaian terbuka,
Voc=Vs
Arus rata-rata dari transistor,
IA=Is/2
Arus puncak transistor,
IP=Is
Tegangan output rata-rata adalah,
Vo=V2=Ns
NpV1=a.V1=aVs (8.5)
8.2.2 Resonant DC Power Supply

Jika variasi keluaran tegangan DC tidak luas, inverterpulsa resonant dapat digunakan. Konfigurasi resonant DC powersupply dapat dilihat pada gambar 8.2
Gambar 8.2 Konfigurasi Resonant DC Power Supply
8.2.3 Bidirectional DC Power Suppply
Dalam beberapa aplikasi seperti charging dan dischargingbaterei, dapat digunakan Bidirectional DC Power Supply sepertiditunjukkan pada Gambar 8.3. Arah aliran daya ditentukan olehnilai Vo, Vs, dan perbandingan belitan transformator ( a = Ns/Np).
a) Half-Bridge Inverter
b) Full-Bridge Inverter

Untuk aliran daya dari sumber ke beban, inverter dioperasikandalam mode inversion, jika :
V0<aVs (8.6)
Untuk aliran daya dari output ke input, inverter dioperasikansebagai penyearah, jika :
V0<aVs (8.7)
Gambar 8.3 Konfigurasi Bidirectional DC Power Supply

ambar 8.4 Konfigurasi system UPS
8.3 POWER SUPPLY AC
Sama halnya dengan power supply DC, power supply AC dibagikedalam tiga tipe yaitu :
1. Switched-Mode AC Power Supply2. Resonant AC Power Supply3. Bidirectional AC Power Supply
8.3.1 Switched-Mode AC Power Supply
Ukuran trafo pada Gambar 8.4 dapat mereduksi frekuensi tinggidari dc link separti ditunjukkan pada Gambar 8.5

Gambar 8.5 Konfigurasi Switched-Mode AC Power Supply
8.3.2 Resonant AC Power Supply
Konfigurasi resonant AC Power Supply dapat dilihatseperti pada Gambar 8.6
Gambar 8.6 Konfigurasi Resonant AC Power Supply
8.3.3 Bidirectional AC Power Supply
Konfigurasi Bidirectional AC power supply dapat dilihatseperti pada Gambar 8.7
Gambar 8.7 Konfigurasi Bidirectional AC Power Supply
Contoh 8.1 :

Tegangan rata-rata DC dari power supply push-pull sepertiGambar 8.1(c), Vo = 24 V, beban resistif R = 1 Ω, tegangan jatuhpada transistor Vt = 1.2 V dan tegangan jatuh pada diode Vd = 0.7 V,factor belitan trafo a = 0.25. Hitunglah :
a. Arus input rata-rata, Is
b. Efisiensi, 𝛈c. Arus rata-rata transistor, IA
d. Arus puncak transistor, Ipe. Arus rms transistor, IR
Jawab :
Diketahui :
Vo = 24 V
R = 1 Ω
Vt = 1.2 V
Vd = 0.7 V
a = 0.25
Ditanyakan :
a. Arus input rata-rata, Is = …..?b. Efesiensi, 𝛈 = ……..?c. Arus rata-rata transistor, IA = ……?d. Arus puncak transistor, Ip = …….?e. Arus rms transistor, IR = ……..?
Penyelesaian :
a. Io = Vo/R = 24/1 = 24 APo = Vo, Io = 24.(24) = 576 WTegangan sekunder,V2 = Vo+ Vd = 24 + 0.7 = 24.7 VTegangan Primer,V1 = V2/a = (24.7)/0.25 = 98.8 V

Tegangan input,Vs = V1 + Vt = (98.8(1.2) = 100 VDaya Input,Pi = Vs. Is = 1.2 IA + 1.2 IA + Vd.Io + Po
Substitusi Ia = Is /2, diperolehIs (99.2 – 1.2) = (0.7 x 24) + 576Is = (92.8) / (98) = 6.048 A
b. Pi = Vs . Is = 100 x 6.048 = 604 W sehinggaEfisiensi, 𝛈 = 576 / 604 = 95.3 %
c. IA = Is /2d. Ip = Is = 6.048 Ae. IR=√k.Ip=√0.5. (6.048 )=4.276Af. Voc = 2 Vs = 2 x 100 = 200 V
BAB IX
ELEKTRONIKA DAYA DALAM MOTOR LISTRIK DC
9.1 PENDAHULUAN
Motor DC memiliki karateristik variable dan dipakai
secara intensif untuk penggerak kecepatan variable. Motor DC
dapat memberikan torka star tinggi dan sangat mngkin diperoleh
control kecepatan dalam skala luas.metode control kecepatan
secara normal lebih sederhana dan lebih murah dibandingkan

dengan penggerak AC. Industry modern dengan kombinasi AC/DC,
DC/AC converter akan didapatkan tegangan tepat.
Penggerak DC dapat diklarifikasian sebagai berikut :
1. Penggerak DC satu fasa (Single-pahase dc droves)
2. Pengaruh DC chopper (chopper dc drives)
3. Penggerak dc tiga fasa(single three phase drives
9.2 KARATERISTIK DASAR MOTOR DC
Sebuah motor dc berpenguatan bebas memiliki rangkaian
ekuibalen seperti gambar 9.1. persamaan dan karateristik motor
DC berpengaruh bebas seperti pada gambar 9.1 sebagai berikut :
Gambar 9.1 Rangkaian ekuivalen motor DC berpenguatan bebas
Vf=Rf.If+LfdIf
dt(9.1)
Va=Ra.Ia+LadIa
dt+eg (9.2)
eg=Ki.if+LfdIfdt
(9.3)
Vf=Kt.If.Ia
(9.4)

Td=Jdωdt
+Bω+TL (9.5)
Dimana :
= Kecepatan motor (rad/s)
B = Koefisien gesek (N.m/rad/s)
Kv = Ko’nstanta tegangan (V/A-rad/s)
La = Induktansi jangkar (H)
Lf = Induktansi medan (H)
Ra = Tahanan jangkar (Ω)
Rf = Tahanan medan (Ω)
TL = Torka beban (N.m)
If = Arus medan (A)
Ia = arus jangkar (A)
eg = Tegangan emf balik (V)
Kondisi Steady state :
vf=Rj.Rf (9.6)
Va=Ra.Ia+Eg=Ra.Ia+Kvlf (9.7)
Td=Kt.If.Ia=Bω+TL (9.8)
Daya yang berbentuk,
Pd=Td.ω (9.9)
Kecepatan motor,
ω=Va−IaRa
KvIf=Va−IaRa
KvVf/R(9.10)

Oleh karena itu, sesuai dengan persamaan (9.10), maka
kecepatan motor ditentukan berdasarkan.
1. Mengatur tegangan armature, Va dikenal sebagai control
tegangan
2. Mengatur arus medan, If dikenal sebagai control medan.
3. Mengatur torka yang terhubung dengan Ia,If
Ketiga cara control diatas disebut sebagai control dasar.
Dalam prakteknya untuk kecepatan yang lebih kecil kecepatan
dasar, arus jangkar dan arus medan diusahakan tetap.
Gambar 9.2 Karateristik motor DC berpenguatan bebas
Untuk motor DC tipe seri rangkaian ekuivalen seperti gambar
9.3(a) dan karateristiknya seperti pada gambar 9.3(b).

Gambar 9.3 a) Motor DC tipe seri,
B) Karateristik motor DC
tipe seri
Persamaan matematis berdasarkan rangkaian motor DC tipe seri
tersebut sebagai berikut :
Eg=KvIa (9.11)
Va=Ra.Ia+Eg=Ra.Ia+Kvla (9.12)
Td=Kt.IaIa+Bω+TL (9.13)
9.3 PENGGERAK DC SATU FASA (Single-Phase-Dc-Drives)
Penggerak DC satu fasa dibagi atas 4 (Empat) kelompok
yaitu :
1. Single-phase half-wave-converter Drives (Penggerak
converter satu fasa setengah gelombang)
2. Single-Phase-Converter Drives (Penggerak converter
satu fasa penuh)
3. Single-Phase Full-Coonverter Drivers (Penggerak
converter satu fasa penuh)

4. Single-Phase dual-converter Drives (Penggerak dual
converter satu fasa)
Gambar 9.4 Rangkaian Dasar Dari single-Phase-DC-Drives.
9.3.1 Single-Phase Half-Wave-Converter Drives
Gambar rangkaian, bentuk gelombang dari single-Phase
Half-Wave-Converter Drives ditunjukkan pada gambar 9.5
Persamaan rangkaian,
Va=Vm2π (I+cosαa) Untuk 0≤αa≤π (9.14)
Vf=Vmπ (I+cosαf ) Untuk 0≤αf≤π (9.15)
Dimana :
Va = Tegangan Jangkar rata-rata
Vf = Tegangan Medan rata-rata
Vm = Tegangan puncak dari sumber AC

Gambar 9.5 Single-Phase Half-Wave-Converter Drives
9.3.2 Single-Phase semikonverter-Drives
Gambar rangkaian, bentuk gelombang dari single-Phase
semikonverter Drives ditunjukkan pada gambar 9.6
Persamaan rangkaian,
Va=Vmπ
(1+cosαa) Untuk 0≤αa≤π (9.16)
Vf=Vmπ
(1+cosαf) Untuk 0≤αf≤π (9.17)

Gambar 9.6 Single-Phase semi converter Drives.

9.3.3 Single-Phase Full-Converter Drives
Gambar rangkaian, bentuk gelombang dari single-phase
full-converter Drives ditunjukkan pada gambar 9.7
Gambar 9.7 Single-Phase full-converter Drives.
Persamaan rangkaian,
Va=Vmπcosαa Untuk 0≤αa≤π (9.18)
Va=2Vmπ
cosαf Untuk 0≤αa≤π (9.19)
9.3.4 Single-Phase Dual-Converter Drives
Gambar rangkaian, bentuk gelombang dari single-phase
dual-converter Drives ditunjukkan pada gambar 9.8

Gambar 9.8 Single-Phase dual-Converter Drives.
Persamaan rangkaian,
Jika converter 1 beroperasi pada sudut delay aI, Maka :
Va=2Vmπ
cosαaI Untuk 0≤αa2≤π
(9.20)
Jika converter 2 beroperasi pada sudut delay a2, maka :
Va=2Vmπ
cosαa2 Untuk 0≤αa2≤π
(9.21)
Dimana a2=π−a1 dan
Vf=2Vmπ
cosαf Untuk 0≤αf≤π
(9.22)

BAB X
ELEKTRONIKA DAYA DALAM MOTOR LISTRIK AC
10.1 PENDAHULUAN
Motor AC memiliki keuntungan :
Ringan (20%-40%) dibandingkan dengan motor DC
Murah
Perawatan/Maintenance rendah
Pengaturan kecepatan motor AC dapat dilakukan dengan :
1. Kontrol frekuensi
2. Control tegangan
3. Control arus
Converter daya, inverter dan control tegangan AC dapat
mengontrol :
Frekuensi
Tegangan

Arus
Ada 2 (dua) tipe penggerak AC yaitu :
1. Motor penggerak induksi
2. Motor penggerak Sinkron
10.2 PENGGERAK MOTOR INDUKSI
Motor adalah tiga fasa secara umum dipakai pada
pengaturan kecepatan dan memiliki belitan tiga fasa pada rotot
dan startor. Gambar 10.1 adalah rangkaian ekuivalen motor AC.
Kecepatan medan sinkron,
ωs=2ωP (10.1)
Tegangan fasa stator,
Vs=√2Vssinωt (10.2)
Fluks lingkage,
∅ (t )=∅mcos (ωmt+δ−ωst) (10.3)
Tegangan induksi per fasa pada belitan rotor,
er=nrd∅dt
=Nrddt (∅mcos [ωmt+δ−ωst ])
¿Nr∅m (ωs−ωm )sin [(ωs−ωm )t−δ ] (10.4)
¿−sEmsin (sωst−δ)
¿−s√2Ersin (sωt−δ)dimana,
Nr = Jumlah belitan rotor/fasa
t = Kecepatan sudut rotor
δ = Posisi relative rotor
Er = Tegangan rms induksi rotor
Bila ada slip,

S=Jωs−ωm
ωs+Bω+TL (10.5)
Gambar 10.1 Rangkaian Ekuivalen Motor AC
10.2.1 Karateristik Performance
Rugi chopper stator,
Psu=3.Is2.Rs
(10.6)
Rugi chopper motor,
Pru=3.Ir2.Rr
(10.7)
Rugi Inti,

Pc=3Vm
2
Rm=3Vs
2
RmL(10.8)
Daya Celah,
Pg=3.Ir2.
Rr
ωs(10.9)
Daya terbentuk,
Pd=Pg−Pru=3Ir2.
Rr
s(1−s) (10.10)
Daya Input,
Pi=3VsIscosθm=Pc+Psu+Pg (10.11)
Daya ouput,
P0=Pd−Pnoload (10.12)
Efisiensi,
n=PoP1
=Pd−Pnoload
Pc+Psu+Pg(10.13)
Bila Pg≫(PC+Psu)danPd≫Pno,Efesiensimenjadi,
n=PdPg
=Pg(1−s)
Pg(10.14)

10.2 Pendekatan rangkaian ekuivalen per fasa

Impedansi input dari motor,
Zf=−Xm (Xs+Xr )+jXm(Rs+
Rr
s)
Rs+Rrs
+j(Xm+Xs+Xr)
(10.15)
Faktor daya motor,
∅m=π−tan−1Rs+
Rr
sXs+Xr
+tan−1 Xm+Xs+Xr
Rs+Rr /s(10.16)
Arus rotor,
Ir=Vs
[(Rs+Rr /s )2+(Xs+Xr )2]1/2
(10.17)
Subtitusi persamaan (10.17) ke persamaan (10.11) dan
(10.12) diperoleh,
Td=3Rf
2Vs2
Sω2[ (Rs+Rs/s)2+(Xs+Xr )2](10.18)
Saat star ωm=0danS=1,Torsistaradalah
Ts=3Rf
2Vs2
ω2 [(Rs+Rs/s)2+(Xs+Xr )2 ]1/2
(10.19)

Gambar 10.3 Karakteristik Torsi-Kecepatan
dTdds
=0,makaslippadatorsimaksimumadalah
Sm=±Rr
[Rs2+(Xs+Xr)
2 ]1/2 (10.20)
Jika S = Sm maka,
Tmm=3Vs
2
2ωs [Rs+√Rss+(Xs+Xr )2 ]
(10.21)
Jika S = -Sm maka torsi regenerating,
Tmr=3Vs
2
2ωs [−Rs+√Rs2+(Xs+Xr )2]
(10.22)
Bila Rs Kecil diandingkan impedansi rangkaian, maka
Td=3RrVs
2
ωs [(Rr/Rs )+(Xr+Xs)2 ] (10.23)

Ts=3RrVs
2
2ωs [Rr2+(Xr+Xs )2 ]
(10.24)
Sm=±Rr
Xr+Xs(10.25)
Tmm=−Tmr=3Vs
2
2ωs(Xs+Xr)(10.26)
Dari persamaan (10.23),(10.24) dan dilanjutkan dengan
persamaan (10.26) diperoleh,
TdTmm
=2Rr(Xr+Xs)
s [(Rr+Rs)2+(Xs/Xr )2 ]
=2ssm
Sn2+1
(10.27))
Dan,
TsTd
=2Rs
2(Xs+Xr)Rr2+(Xs+Xr)
2=2smsm2+1
(10.28)
Bila s < 1, S2 << S2 m maka
TdTmm
=2ssm
=2 (ωs−ωs)smωs
(10.29)
Maka kecepatan sebagai fungsi torka adalah,
ωm=ωs(1−sm
2TmmTd) (10.30)
Kecepatan dan torsi dari motor induksi dapat dirubah oleh
salah satu metode berikut :
1. Pengaturan tegangan stator
2. Pengaturan tegangan rotor
3. Pengaturan frekuensi

4. Pengaturan frekuensi dan tegangan stator
5. Pengaturan arus stator
6. Pengaturan tegangan, arus dan frekuensi

10.2.2 Pengaturan Tegangan Stator
Persamaan (10.18) mengintimidasikan bahwa torsi
proporsional dengan kuadrat tegangan stator dan penurunan
kecepatan. Bila tegangan terminal adalah penurunan bVs maka
persamaan (10.18) dikembangkan menjadi,
Td=3R2(bVs)
2
sω2 [(Rs+Rr/s2 )+(Xs+Xr )2 ] dimana b ≤ I
Va=bVs=Kmωθ
∅=Va
Kmω∅(10.31)
Gambar 10.4 Karakteristik Kecepatan Torsi Dengan PengaturanTegangan Stator

10.2.3 Pengaturan Tegangan Rotor
Pada belitan rotor, tahana 3 fasa eksternal dihubungkan
untuk slip ring seperti ditunjukkan gambar 10.5 tahanan 3 fasa
bias diganti dengan penyearah diode 3 fasa dan sebuah chopper
seperti ditunjukkan gambar 10.6(a), dimana GTO dipoerasikan
sebagai sebuah saklar chopper. Nduktor Ld, arus sumber
sebenarnya Id dan pengaturan tahanan efektif chopper dirumuskan
sebagai,
Rc=R (1−k )
(10.32)
Dimana k adalah selama siklus chopper. Kecepatan dapat
diatur dengan pengaturan k.
Gambar 10.5 Pengaturan kecepatan dengan resistor pada rotor

Gambar 10.6 Kontrol Slip Daya
10.2.4 Pengaturan Frekuensi
Kecepatan dan torsi motor induksi dapat dikontrol dengan
merubah frekuensi sumber. Jika tegangan sumber dijaga tetap
pada nilai ratingnya maka frekuensi dapat direduksi dibawa
nilai ratingnya, maka fluks akan meningkat, hal ini dikenal
celah fluks saturasi dan parameter motor lainnya seharusnya
tidak dipertimbangkan untuk menghitung karateristik kecepatan-
torsi, pada frekuensi rendah, reaktansi akan meningkat dan
arus motor menjadi tinggi. Tipe pengaturan frekuensi seperti
ini tidak digunakan
Jika frekuensi meningkat diatas ratingnya, fluks dan
torsi seharusnya menurun. Jika kecepatan sinkron berada pada
frekuensi rating disebut control dasar. Kecepatan sinkron dan
frekuensi menjadi,

ωs=βωb
s=βωb−ωm
βωb(10.33)
Dan torsi menjadi,
Td=3RrVa
2
sβωb [(Rs+Rr/s )2+(βXs+βXr )2](10.34)
Karateristik kecepatan-torsi ditunjukkan seperti pada gambar
10.7 untuk variasi nilai β, torsi maksimum pada kecepatan
dasar,
Tmb=3Va
2
2ωb(Xs+Xr)(10.35)
Torsi maksimum pada frekuensi lain,
Tm=3
2ωb(Xs+Xr)(Va
β )2
(10.36)
Slip maksimumnnya,
sm=Rr
β (Xs+Xr ) (10.37)
Tm
Tmb= 1β2 (10.38)
Tmβ2=Tmb (10.39)
Dari persamaan (10.38 dan 10.39) disimpulkan torsi maksimum
proporsional dengan kuadrat frekuensi

Gambar 10.7 Karakteristik Kecepatan-Torsi Dengan PengaturanFrekuensi
10.2.5 Pengaturan Tegangan dan Frekuensi
Jika tegangan frekuensi dijaga konstan, maka fluks juga
menjadi konstan. Torsi maksimum independen terhadap frekuensi,
sehingga dapat dijaga konstan. Pada frekuensi rendah fluks
celah udara mereduksi impedansi stator dan tegangan meningkat
untuk menjaga level torsi, hal ini dikenal sebagai control
Volt/Hertz. Jika ωs=βωβdan rasio tegangan frekuensi tetap, maka-
Va
ωs=d (10.40)
Torsi menjadi,
Td=3Rrd
2ωb2 (βωb−ωm )
ωb2 (Rs+Rr)
2+[(βωb−ωm ) (Xs+Xr ) ]2
(10.41)
Dan slip untuk torsi maksimum,

sm=Rr
[ (Rs2+β2)(Xs+Xr ) ]1 /2 (10.42)
Karateristik kecepatan-torsi ditunjukkan pada gambar
10.8, dengan mengatur tegangan dan frekuensi, maka torsi dan
kecepatan dapat diatur seperti hubungan persamaan diatas.
Secara normal torsi dijaga konstan dengan variasi tegangan.
Gambar 10.8 Karakteristik Kecepatan-Torsi Dengan PengaturanTegangan/Frekuensi
Gambar 10.9 adalah rangkaian pengatur tegangan dan
frekuensi yang mungkin dapat disusun dari fixed dan PWM

inverter, variable dc dan inverter, variable dc dual converter
dan inverter.
Gambar 10.9 Karateristik kecepatan-torsi engan pengaturantegangan/frekuensi.
10.2.6 Pengatur Arus
Torsi pada motor induksi dapat dikontrol dengan mengatur
arus rotor. Karateristik kecepatan-torsi dengan pengaturan
arus rotor dapat dilihat pada gambar 10.10 arus rotor didapat
dari persamaan,

Ir=jXmIi
Rs+Rr
s +j (Xm+Xs+Xr)=Ir<θ1 (10.43)
Torsi,
Td=3Rr (XmIi )2
sω2 [ (Rs+Rr/s )2 (Xm+Xs+Xr )2](10.44)
Torsi Star (s=1)
Ts=3Rr (XmIi )2
ω2 [(Rs+Rr /s )2 (Xm+Xs+Xr )2](10.45)
Gambar 10.10 Karakteristik Kecepatan-Torsi Dengan PengaturanArus Rotor
Slip untuk torsi maksimum,
sm=±Rr
[Rs2+(Xm+Xs+Xr )2 ]1 /2 (10.46)
Torsi, Td
I1 > I2 > I3 > I4

sm=±Rr
Xm+Xr(10.47)
Torsi maksimum ( s=Sm ),
Tm=3Xm
2
2ωs [Xm+Xr ]Ii2=
3Lm2
2 [Lm+Lr ]Ii2 (10.48)
Gambar 10.11 current-source inductor motor drive
10.2.7 Pengaturan tegangan, Arus, dan Frekuensi
Karateristik Kecepatan torsi pada motor induksi bergantung
pada tipe pengaturan. Hal ini diperlukan untuk mengatur
tegangan, arus dan frekuensi untuk mendapatkan torsi dan
kecepatan yang diinginkan. Ada tiga cara pengaturan pada motor
induksi yaitu :

1. Kecepatan dapat diatur dengan pengaturan tegangan/arus
pada torsi konstan
2. Motor induksi dioperasikan pada arus konstan dan slip
diatur.
3. Kecepataan diatur dengan frekuensi yang mereduksi arus
stator.
BAB XI
ELEKTRONIKA DAYA DALAM MOTOR STEPPER11.1 PENDAHULUAN
Motor step merupakan suatu alat digital yang operasinya
berdasarkan prinsip reluktansi atau motor sinkron, dimana
inputnya merupakan suatu rangkaian pulsa (train of pulses) dan
output yang dihasilkan adalah :
Putaran poros motor sebesar sudut tertentu dari
posisi awalnya, baik dalam arah jarum jam maupun
kebalikannya
Putaran poros motor dengan kecepatan tertentu
dalam arah jarum jam maupun kebalikannya.

Dalam hal tersebut diatas, maka jumlah pulsa dari suatu
rangkaian pulsa yang menjadi input dari motor step akan
menentukan besarnya perubahan posisi sudut dari poros
motornya, sedang frekuensi pulsanya akan menentukan kecepatan
putarannya.
Motor step mempunyai dua bagian utama yaitu rotor dan
stator, dengan 2, 3 dan 4 phase kumparan yang terdistribusi
secara seragam dalam slot-slot pada statornya. Gambar
11.10.2014
Step angle = sudut langkah = 360o/(sn)
S = jumlah staks
N = gigi setiap stak
Gambar 11.1 Skematis motor step (peramanent magnet)
11.2 MODE SWITCHING (Step Putaran Sebesar 90o)
Ada beberapa switching mode yang biasa dilakukan untuk
mendapatkan step putaran yang dikehendaki, misalnya step
putaran sebesar 90o atau putaran 45o.
a. Mode Switching A (Step Putaran Sebesar 90o)

Gambar 11.2 Mode switching A untuk memutar rotor searah
dengan jarum jam dan step perputaran sebesar 90o.
Tabel 11.1 Mode Switching A untuk memutar jarum jam dan
step perputaran sebesar 90o.
STEPTerminal
T1 T2 T3 T4
1 + -2 + +3 - +4 -5 + -
Tabel 11.2 Mode switching A untuk mendapatkan putaran
rotor berlawanan dengan arah putaran jarum jam
STEPTerminal
T1 T2 T3 T41 + -

2 - +3 - +4 + -5 + -
Dengan mode switching A rotor akan berputar dengan step
perputaran sebesar 90o.
Perpindahan tegangan positif dan negative dari satu
terminal ke terminal lainnya untuk menghasilkan putaran
rotor yang searah dengan jarum jam.(lihat table 11.1)
Untuk mendapatkan arah putaran yang berlawanan dengan
arah putaran jarum jam dengan mode switching A ini, maka
tegangan positif dan negative dari catu daya harus
dipindahkan dari satu terminal ke terminal lain seperti
yang ditunjukkan dalam table 11.2
b. Mode Switching B
Pada mode switching B step perputaran rotor yang
dihasilkan adalah 90o,seperti halnya pada mode switching A

Gambar 11.3 Mode Switching B.
Dimana satu step ekuivalen dengan putaran sebesar 90o dan
arah putarannya searah jarum jam.
Tabel 11.3 Mode switching B, dengan step perputaran 90o
dan arah putaran searah dengan arah putaran jarum jam.
STEPTerminal
T1 T2 T3 T4
1 + + - -2 - + + -3 - - + +4 + - - +5 + + - -
Dalam gambar 11.3 dan table 11.3 ditunjukkan mode
switching B dengan 2 kutub stator dieksitasi secara
bersamaan dan menghasilkan putaran rotor searah dengan
jarum jam dengan step perputaran sebesar 90o.
c. Mode Switching C
Mode switching C merupakan gabungan dari mode switching A
dan mode switching B yang dapat menghasilkan step
perputaran rotor sebesar 45o.

Tabel 11.4 Mode switching C. satu step sama dengan
putaran rotor sebesar 45o dan arah putaran searah dengan
arah putaran jarum jam.
STEPTerminal
T1 T2 T3 T4
1 + -2 + + -3 + -4 - + + -5 - +6 - - + +7 - +8 + - - +9 + -

Gambar 11.4 Mode switching C Satu step sama dengan
putaran rotor sebesar 45o dan arah putaran searah dengan
arah putaran jarum jam.
d. Mode Switching D, E, F dan G
Proses switching tersebut akan menjadi sederhana bila
motor step dilengkapi dengan center tap pada kumparan-
kumparan statornya, seperti yang diperlihatkan pada
gambar 11.5. Dengan cara ini kumparan stator menjadi 4
phase. Dalam prakteknya kedua center tap tersebut
dihubungkan ke tegangan positif dari catu daya secara
permanen dan terminal dari stator dihubungkan ke tegangan
negative melalui suatu peralatan switching.
Tabel-tabel 11.5, 11.6 dan 11.7 menunjukkan mode
switching pada motor step yang memilikicenter tap untuk
step perputaran sebesar 90o dan 45o dan selanjutnya
dinamakan mode D, mode E dan mode F yang memiliki
keterkaitan dengan mode A, mode B, mode C di depan.

Gambar 11.5 Kumparan stator
Tabel 11.5 Mode Switching D
Step perputaran 90o dan center tap dihubungkan ke tegangan
positif dari catu daya
STEPTerminal
T1 T2 T3 T4
1 -2 -3 -4 -
Tabel 11.6 Mode Switching E
Step perputaran 90o dan center tap dihubungkan ke tegangan
positif dari catu daya
STEPTerminal
T1 T2 T3 T4
1 - -2 - -3 - -

4 -
Tabel 11.7 Mode Switching F
Step perputaran 45o dan center tap dihubungkan ke tegangan
positif dari catu daya
STEPTerminal
T1 T2 T3 T4
1 -2 - -3 -4 - -5 -6 - -7 -8 - -
Tabel 11.8 Perbandingan dari berbagai mode switching
Mode
switching
Torsi
electromagnetDaya input
Torsi per
daya inputA 71% 25% 2,84B 100% 50% 2,00
C 84% (rata-
rata)
37,5 %
(rata-rata)
2,24 %
(rata-rata)

D 71 % 50 % 1,42E 100 % 100 % 100 %
F84 % (rata-
rata)
75 % (rata-
rata)
1,12 (rata-
rata)
Gambar 11.6 Motor Step dengan variable reluktansi
11.3 KONSTRUKSI MOTOR STEP
Ada dua jenis motor step jika ditinjau dari konstruksinya,
yaitu :
a. Motor step variable reluktansi lihat gambar 11.6
b. Motor Step denganmagnit permanen (lihat gambar 11.7)
Motor step variable reluktansi memiliki step perputaran
sebesar 18o, yaitu bila digunakan mode switching D dan E, atau
memiliki step perputaran sebesar 9o bila menggunakan mode
switching F. Center tap dari kumparan stator pada motor step
dihubungkan dengan tegangan positif dari catu daya, kemudian
terminal T1 dihubungkan ke tegangan negatifnya. Bila tegangan
negative dari catu daya dipindahkan dari terminal T1 ke
terminal T2, maka rotor akan berputar searah jarum jam sebesar
18o demikian seterusnya.

Gambar 11.7 Motor step dengan magnit permanen
Gambar 11.8 Karakteristik dari torsi perlawanan sebagai fungsi
dari posisi pergerakan rotor, karena dipaksa berputar oleh
suatu torsi dari luar.
11.4 PRESTASI (PERFORMANCE)
a. Dalam kondisi static
Apabila rotor berada pada suatu posisi keseimbangan untuk
suatu kondisi eksitasi yang tertentu, kemudian rotor

dipaksa berputar dengan memberi torsi dari luar, maka
dari dalam motor sendiri akan timbul perlawanan untuk
mempertahankan posisi keseimbangan rotornya. Tosi
perlawanan dari dalam tersebut dinamakan restoring torque.
Besarnya torsi perlawanan tersebut bervariasi secara
sinusoidal terhadap besarnya sudut perputaran. Torsi
perlawanan akan berharga maksimum bila sudut
perputarannya 90o, baik dalam arah putaran jarum jam
maupun kebalikannya (dilihat gambar 11.8).
b. Dalam kondisi dinamik
Dengan dilakukannya proses switching, maka rotor akan
berputar secara bertahap dari posisi keseimbangan yang
satu ke posisi keseimbangan yang lain, sesuai dengan arah
eksitasi medan magnet yang diberikan.
Bila selang waktu (time interval) antara suatu proses
switching ke proses switching berikutnya cukup lama,
sehingga osilasi yang terjadi dapat teredam, maka proses
switching tersebut menghasilkan suatu operasi perputaran
rotor yang stabil meskipun disertai dengan proses osilasi
yang teredam (lihat gambar 11.9). Bila laju proses
switching dipercepat (selang waktu antara proses
switching yang satu dengan proses switching yang
berikutnya menjadi berkurang) sedemikian rupa sehingga
proses perputaran yang disertai dengan osilasi
dieliminir, maka dihasilkan proses perputaran rotor
seperti yang ditunjukkan dalam gambar 11.10 Dalam gambar
11.11 ditunjukkan bagaimana laju proses switching dapat
diatur untuk menghindari terjadinya perputaran rotor yang

disertai proses isolasi, walaupun masih terjadi proses
percepatan dan perlambatan dalam perputaran rotor yang
relative lebih halus (smooth).
Gambar 11.9 Proses switching yang menghasilkan perputaran
rotor yang stabil, walaupun disertai dengan terjadinya
proses osilasi yang teredam.

Gambar 11.10 Proses switching yang diatur sedemikian rupa
sehingga mengeliminir terjadinya proses osilasi teredam
perputaran rotor.

Gamabr 11.11 Pull rate, pull out rate, daerah respond an
slew range dari motor step sebagai fungsi dari laju
switching.
11.5 CONTOH APLIKASI
Motor step merupakan alat digital yang tidak memiliki
saingan jika digunakan dalam system penggerak dengan loop
terbuka (open loop). Output dari motor step adalah putaran
rotor dengan kecepatan dan posisi akhir yang tertentu dan
merupakan fungsi dari frekuensi pulsa dan jumlah pulsa yang
menjadi inputnya. Dalam daerah responnya, motor step dapat
digunakan sebagai penggerak dari suatu system positioning
dengan loop terbuka.
Motor step dapat digunakan sebagai system penggerak dari
beberapa peralatan seperti printer, recorder, plotter dan
system positioning lainnya. Dalam table 11.9 ditunjukkan
spesifikasi ari 2 buah motor step.
Tabel 11.9 Spesifikasi teknik dari beberapa motor step.
Spesifikas
i
Merek
motor dan
tipe
Unit
Perputaran rotor per
pulsaDerajat
Laju switching
maksimumPps
Daya output WattTorsi output
(static)
Nm

……………………………….
……………………………….
……………………………….
……………………………….
……………………………….
………………..
………………..
………………..
………………..
………………..Inersia beban yang
diizinkanKgm2
11.12 Sistem Pengontrolan Motor Step
Sistem control untuk penggerak motor step (stepper motor
driver) pada umumnya terdiri dari tiga bagian utama, yaitu :
Generator pembangkit pulsa, yang berupa suatu unit
perangkat keras (hardware) atau berupa program (software)
dalam suatu computer.
Rangkaian logika penggerak (logic driver)
Penguat daya (amplifier)
Masing-masing bagian tersebut akan diuraikan lebih lanjut.
a. Generator Pembangkit Pulsa
Pada system NC, generator pembangkit pulsa merupakan
suatu rangkaian perangkat keras (yang berfungsi sebagai
interpolator) yang disebut DDA (Digital Differentian
Analyzer). Sedangkan pada system CNC, generator
pembangkit pulsa merupakan suatu program yang tersimpan
dalam memori CNC. Generator pembangkit pulsa ini akan
diuraikan lebih lanjut dalam bab terpisah, yaitu bab
tentang interpolator.
b. Penggerak Logika (Logic Driver)

Penggerak logika diperlukan untuk melakukan proses
switching secara elektronis, yaitu memutus dan
menghubungkan arus listrik dari sumber catu daya melalui
setiap phase dari kumparan statornya. Proses switching
dapat juga dilakukan dengan menggunakan computer. Salah
satu cara yang digunakan untuk proses switching dengan
perangkat keras adalah menggunakan rangkaian logika
(logic circuit). Rangkaianlogika tersebut (lihat gambar
11.12 terdiri dari 3 komponen utama, yaitu :
Up/Down Counter (misalnya 74 LS 193)
3 to 8 decoder (misalnya 74 LS 138)
Gerbang NAND, open collector (misalnya 74 LS 12).

Gambar 11.12 Rangkaian logika, untuk penggerak motor step.
Gambar 11.13 Output dari up/down Counter bila pada pin UP
diberi serangkaian pulsa.
Apabila ada suatu rangkaian pulsa masuk sebagai input
pada pin UP dari UP/DOWN COUNTER, maka sebagai outputnya (pada
pin QA, QB dan QC) dihasilkan pulsa-pulsa seperti yang
ditunjukkan dalam gambar 11.13. Selanjutnya output dari
counter menjadi input dari decoder. Hubungan antara input dan
output pada decoder tersebut ditunjukkan dalam table 11.10.
Output dari decoder tersebut diatas selanjutnya digunakan
sebagai input dari Gerbang Logika NAND (NAND Gate) open
collector, sedemikian rupa sehingga output dari Gerbang logika
NAND secara bergantian melakukan proses switching, misalnya
dimulai dengan mengalirnya arus listrik menuju penguat daya
melalui titik K-N, K, K-L, L, L-M, M, M-N, N dan akhirnya
kembali ke K-N. Laju dari proses switching ini merupakan

fungsi dari frekuensi sinyal pulsa yang merupakan input dari
UP/DOWN Counter (lihat gambar 11.12 Selanjutnya output dari
Gerbang Logika NAND digunakan sebagai input dari penguat daya
(amplifier).
Tabel 11.10 Hubungan antara input dengan output dari 3 to 8
decoder.
Input OutputA B C Y7 Y6 Y6 Y4 Y3 Y2 Y1 Y0
0 0 0 1 1 1 1 1 1 1 00 0 1 1 1 1 1 1 1 0 10 1 0 1 1 1 1 1 0 1 10 1 1 1 1 1 1 0 1 1 11 0 0 1 1 1 0 1 1 1 11 0 1 1 1 0 1 1 1 1 11 1 0 1 0 1 1 1 1 1 11 1 1 0 1 1 1 1 1 1 1

Gambar 11.14 Penguat daya R/L (Resistance Limited).
Gambar 11.15 Rangkaian penggerak logika untuk motor step
dengan penguat dayanya.
c. Penguat Daya
Salah satu jenis penguat daya yang akan dijelaskan adalah
jenis L/R (Limited-Resistance) seperti yang ditunjukkan
pada gambar 11.14 Kumparan phase dari motor step
dinyatakan sebagai hambatan Rm dan induktansi L yang
dihubungkan secara seri (lihat gambar 11.14) Time
constant elektris dari motor step ini (L/Rm) biasanya

berkisar antara 10 mili-detik. Bila suatu tegangan
disuplai dari catu daya yang tegangannya konstan ke
kumparan motor step tersebut, maka besar arus listrik
yang terjadi akan mencapai 95% dari harga maksimumnya
dalam waktu 3 kali dari time constantnya, sehingga akan
mempengaruhi laju switching yang diperbolehkan.
Beberapa metoda yang dapat dipergunakan untuk mempercepat
arus listrik mencapai harga maksimumnya pada suatu
kumparan dalam suatu proses switching adlah sebagai
berikut :
a. Digunakan tegangan catu daya yang tinggi, kemudian
memasang hambatan (R) secara seri dengan kumparan
motor, sehingga time konstannya menjadi L/(Rm + R).
Suatu diode dipasang secara parallel terhadap kumparan
motor (lihat gambar 11.14) untuk proses discharging
pada akhir dari setiap proses switching OFF.
b. Berusaha mendapatkan arus konstan di kumparan motor
stepnya, untuk setiap laju switching yang dilakukan
BAB XII
ELEKTRONIKA DAYA DALAM MOTOR DC-PM
12.1. PRINSIP OPERASI
Motor servo DC-PM terdiri dari beberapa komponen utama,
yaitu(lihat gambar 12.1):
Rotor dengan kumparan armature dan komutatornya
Magnet permanen pada statornya

Sikat-sikat (brushes) dengan beserta dudukannya.
Fungsi komutator adalah membalik arah aliran arus listrik
yang melalui kumparan armaturnya, pada saat kumparan
armature berpindah dari kutub utara ke kutub selatan
(atau sebaliknya), untuk mendapatkan putaran motor sesuai
dengan yang dikehendaki. Beberapa contoh motor servo DC-
PM yang menunjukkan proses pembalikan arah aliran arus
listrik dikumparan armaturnya ditunjukkan dalam gambar
12.2. apabila arus listrik masuk kekumparan armature
motor servo DC-PM melalui titik 0 (lihat digambar 12.3),
maka arus listrik tersebut akan meninggalkan kumparan
armature melalui titik P.
Gambar 12.1 Model Dari Motor Servo Dc-Pm

Gambar 12.2 Proses pembalikan arah aliran arus listik
pada beberapa jenis motor servo DC-PM
Gambar 12.3 Formasi kumparan pada rotor dari motor DC-PM
Bila kumparan Q dihubungkan ke kumparan R yang terletak
disebelah kumparan P dan kumparan P dihubungkan kekumparan S
yang terletak didekat kumparan Q dam proses ini dilakukan
secara berkesinambungan, maka akan terbentuk suatu kumparan
tertutup pada permukaan rotor.
Gambar 12.4 Kontrak antara sikat dengan komutator

Gambar 12.5 Hubungan antara torsi T dengan tegangan arus
searah V dan putaran n, dengan beberapa batasan dari daerah
operasinya.
Tegangan arus searah (VI) yang diberikan pada terminal-
terminal dari motor DC-PM akan menghasilkan putaran motor
sebesar n rpm dengan torsi sebesar T Nm. Yang hubungannya
dinyatakan dalam gambar 12.5
12.2 KARATERISTIK MOTOR SERVO DC-PM
Suatu motor DC-PM ditunjukkan secara skematis dalam
gambar 12.6. tegangan listrik arus searah Va yang diberikan
pada kumparan armature selanjutnya dapat dinyatakan sebagai
persamaan berikut :
Va=i.R+Ldidt
+(Kv.ωr)
(12.1)
Dimana,
Va = Tegangan listrik arus searah pada kumparan
armature.
I = Arus listrik pada kumparan.
R = Hambatan pada kumparan.
L = Induktansi pada kumparan
KV = Konstanta back emf.

= d0dt=kecepatanputarrotor
Dθ = Besarnya perubahan posisi sudut rotor.
Gambar 12.6 gambar skematis dari motor DC-PM
Torsi yang dihasilkan motor DC-PM dalam gmabar 12.6
adalah sebagai berikut :
Tr=Kt.i−Jrd2θdt2
+Kddθdt2
+Tf+T1 (12.2)
Dimana,
Kt=¿ Konstanta torsi dari motor
Jr=¿ Inersia rotor
Kd=¿ Koefisien peredaman
Tf=¿ torsi untuk melawan gesekan (Friction Torque)
Tt=¿ torsi untuk melawan beban.
Apabila induktansi kumparan motor dapat diabaikan, maka
persamaan 12.1 akan menjadi :
Va=i.R+Kv.r

i=1R
[Va−Kv.ωr] (12.3)
Apabila efek peredaman(damping) dan gesekan juga
diabaikan, maka persamaan 13.4 akan menjadi :
Tr=Kt.t−Jr.d2dt2
θ+T1 (12.4)
Dari persamaan 12.3 dan persamaan 12.4 akan diperoleh :
Tr=KtR [Va−Kv.ωr ]−Jr. d
dtωr+T1
ωr=iKv.Va−
Jr.RKt.Kv
. ddt
ωr−R
Kt.Ki.T1
(12.5)
Gambar 12.7 Hubungan antara kecepatan dengan torsi/arus
listrik.
a. KARATERISTIK DALAM KONDISI STATIS
Dalam keadaan stationer ddtωr−0, sehingga persamaan 12.5
menjadi sama dengan :

r=1Kv.Va−
RKt.Kv
T1
(12.6)
Stalling toeque pada kecepatan ωr=0 adalah sama dengan :
Tstall=[ KtR ].Va
(12.7)
Dalam keadaan tanpa beban (no load) kecepatan
stationernya adalah :
ωrnoload=Va
Kv(12.8)
Selanjutnya hubungan antara kecepatan dengan torsi/arus
tersebut dapat dilihat dalam gambar 12.7.
b. KARATERISTIK DINAMIK
Dari persamaan 12.5 dapat diperoleh hubungan antara
kecepatan motor dangan tegangan listrik arus searah pada
terminal input dari motornya :
[ Jr.RKt.Kv. ddt r+r]= 1
KvVa−
RKt.Kv
.T1
(12.9)
Dimana :Jr.RKt.Kv
=tm (time constant mekanis)
Dengan transformasi laplace, persamaan 12.9 dapat diubah
menjadi dalam domain p sebagai berikuut :
[tmP+1 ]ωr (p)− 1Kv.Va (p)− 1
Kl.Kv.T1(p) (12.10)

ωr (p )−(1 /Kv ) [Va(p)]−( RKl .Kv)[T1(p) ]
1+tm.P
(12.11)
Bila kondisi awal nol, input Va berbentuk fungsi step dan
T1=0, maka solusi dari persamaan 12.11 dalam bentuk domain
waktu adalah :
ωr (t )− 1Kv
.Va [1−e−1/tm ] (12.12)
Dari persamaan 4.13 dapat dilihat bahwa solusi untuk t
mendekati tidak terhingga(telah mencapai kondisi stationer)
adalah (1 /Kv )Va.
Contoh soal 12.1
Suatu motor servo DC-PM memiliki konstanta torsi dan back
emf sebagai berikut :
K1 = 0,824 Nm/A
Kv = 0,824 Volt.detik/rad
Bila hambatan kumparan adalah 0,41 ohm dan inersia rotor
2,15.10-2 kg.m2, hitunglah
a. Time constant mekanis dari motor tersebut
b. Kecepatan putaran motor dalam kondisi stationer (Va =
85 Volt), untuk kondisi tanpa beban dan kondisi beban
penuh (13,57 Nm)
Pemecahan contoh soal 12.1
a. Time constant mekanis :
tm=Jr.Rkt.kv

¿2,15.10−2.0,41
(0,824 )2 kg.m2.ohm
[volt.detik/rad ] [N /A ]¿12,98mili−detik.
b. Kecepatan dalam kondisi stationer :
ωr=1Kv.Va−( RKt
.Kv).T1Dalam kondisi tanpa beban (T1 = 0), kecepatan adalah :
ωr=1Kv.Va
¿1
0,824.85 volt
(volt.detik)/rad¿103rad /detik
¿103 (60/2π )rpm
¿983,6rpmDalam kondisi beban penuh (T1 = 13,57Nml), kecepatannya
akan menjadi :
ωr=103 (rad/det )− R.1Kt.Kv
¿103−0,41.13,57
(0,824 )2ohm.Nm
(V.det/rad ) (Nm/A )
¿103−8,19 (rad/det)
¿94,81rad/det
¿94,81 602π
rpm
¿905,4rpm

Kecepatan motor setelah mencapai keadaan stationer, untuk
kondisi tanpa beban dan beban penuh digambarkan pada gambar
12.8
Gambar 12.8 Respon motor dalam keadaan stationer untuk kondisi
tanpa beban dan beban penuh, dari contoh soal 12.1
Perbandingan putaran motor dan ulir penggerak ditentukan
oleh perbandingan jumlah gigi dari reduksinya,
Kg=ω1
ωr−Zr
Z1(12.13)
Untuk mengetahui time constant dari system penggerak ini,
inersia beban (meja+ball screw+roda gigi) harus dipindahkan ke
rotor dari motornya.
Tm=JeqRKtKv
Dimana,
Jeq = J ekuivalen yang dinnyatakan sebagai berikut :

Jeq=Jr+Jrg1+Kg2[Jrg2+J1+m.p2(2π )2 ] (12.14)
Dimana,
Jr = Inersia motor
Jrg1 = Inersia roda gigi 1
Jrg2 = Inersia roda gigi 2
J1 = Inersia ulir penggerak
m = Masa dari meja
P = pits dari ulir gerak
1 = Kecepatan putaran ulir penggerak
r = Kecepatan putaran motor
12.3 TEKNIK PENGONTROLAN MOTOR SERVO DC-PM
Servo DC-PM yang digunakan sebagai motor penggerak
dalam mesin-mesin perkakas NC, yaitu :
- Converter DC to DC (Chopper), misalnya :
a. Pulse frequency modulation (PFM)
b. Pulse width modulation (PWM)
- Phase Controlled Rectifier (AC to DC)
Dalam bab ini yang akan dibahas lebih lanjut adalah
converter DC to DC dengan teknik PWM (Pulse Width Modulation).
Dalam gambar 12.9 ditunjukkan suatu gambar skematis
yang menjelaskan prinsip dasar dari teknik PWM untuk
mengontrol kecepatan dan arah putaran motor servo DC-PM.
Suatu catu daya tegangan searah (DC Power Suplly)
dengan tegangan sebesar V Volt dignakan untuk mengsuplai motor
DC-PM (lihat gambar 12.9a). bila saklar S ditutupi (terjadi

kontak) maka arus listrik akan mengalir melalui kumparan motor
servo DC-PM (lihat gambar 12.9a dan 12.9b).
Gambar 12.9 Prinsip dasar dari teknik PWM (Pulse Width
Modulation)
Bila saklar S dibuka, arus listrik akan mengalir dimotor
servo DC-PM, karena masih ada energy tersimpan dalam kumparan
motornya.arus ini mengalir melalui diode D dan dinamakan free
whelling current. Selanjutnya, bila saklar S ditutup kembali,
maka arus listrik dari catu daya mengalir kembali melalui
motor. Dengan demikian jelas bahwa teknik pengontrolan PWM ini
hanya menggunakan prinsip pemutusan dan penyambungan aliran
arus listrik melalui motor servo DC-PM.
Dalam gambar 12.9 dapat dilihat bahwa lebar pulsa (Pulse
Width) akan bervariasi dalam daerah 0<Ton<T, dimana T
menyatakan suatu harga konstan dan f ( frekuensi switching) =
1/T.

Dalam praktek, switching tersebut bias dilakukan denga
thyristor atau transistor. Rangkaian dasar dari chopper PWM
dapat dilihat pada gambar 12.10.
Gambar 12.10 Rangkaian dasar chopper PWM
12.10 Rangkaian dasar chopper PWM yang ditunjukkan dalam
gambar hanya dapat mengalirkan arus listrik dari catu daya ke
motor. Tetapi tidak sebalinya, dengan demikian proses
regenerasi tidak dapat dilakukan (regenerasi merupakan proses
penggeraman yang paling disukai untuk system-sistem penggerak
dengan beban energy yang tinggi, dimana energy kinetic dari
beban disisipi oleh discharging resistor atau rem gesek).
Dalam gambar 12.11 ditunjukkan rangkaian dasar chopper
PWM dua kuadran yang mampu melakukan proses regenerasi. Q1 dan
D1 berfungsi sama seperti Q dan D pada gambar 12,10
Bila beban dari motor ditambah dan ton juga ditambah untuk
mempertahankan kecepatan putaran pada kondisi pembebanan yang
meningkatkan tersebut, maka bentuk gelombang arus listrik ia
akan sama seperti yang ditunjukkan dalam gambar 12.10

Gambar 12.11 Chopper 2 kuadran.
Bila sebalinya, suatu penuruanan kecepatan harus
dilakukan dengan menurunkan harga ton, maka Q1 dan D1 untuk
sementara tidak mengalirkan arus listrik seperti yang
ditunjukkan dalam gambar 12.11c dalam hal ini, ia untuk

sementara waktu dalam periode pengereman akan berharga
negative, dan proses pengereman regenerasi. Rangkaian chopper
PWM 2 kuadran yang ditunjukkan dalam gambar 12.11 hanya dapat
memutar motor dalam satu arah saja.
Berikut ini akan ditunjukkan suatu rangkaian dasar
chopper PWM 4 kuadran, yang dapat memutar motor dalam arah CW
maupun CCW dan sekaligus dapat melakukan proses pengereman
regenerasi dalam dua arah tersebut.
Gambar 12.12 Proses modulasi lebar pulsa (PWM) dalam rangkaian
chopper 4 kuadran.
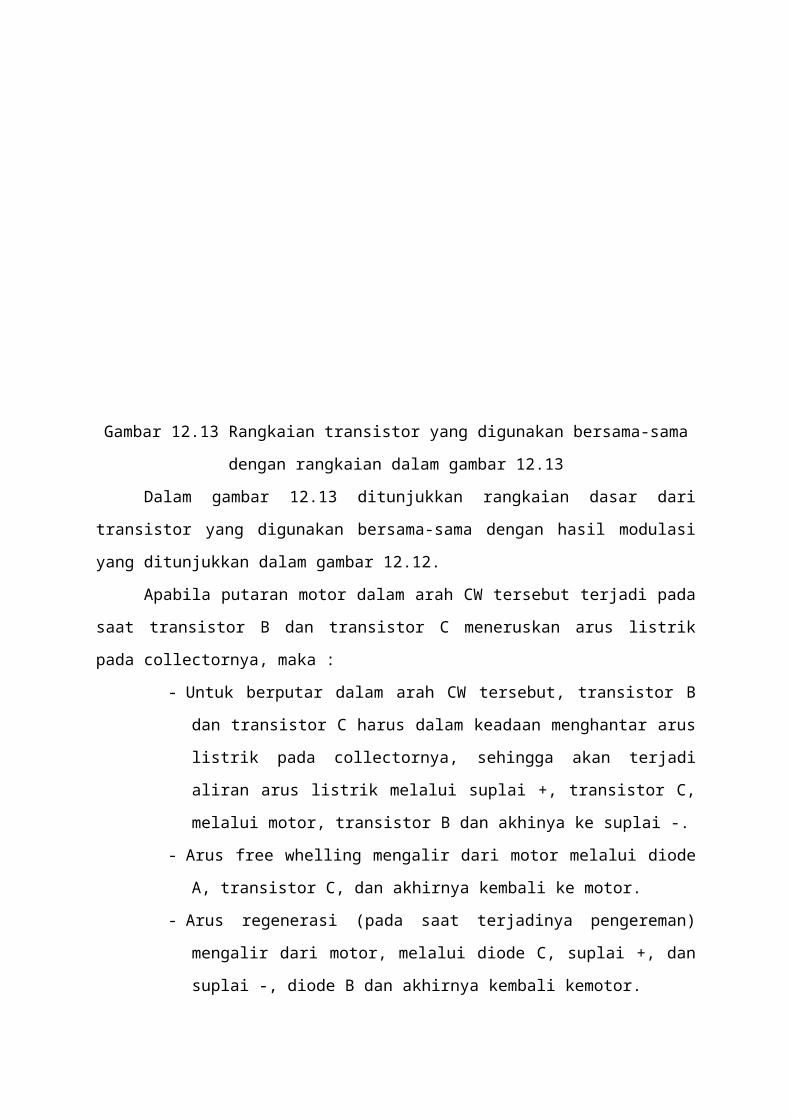
Gambar 12.13 Rangkaian transistor yang digunakan bersama-sama
dengan rangkaian dalam gambar 12.13
Dalam gambar 12.13 ditunjukkan rangkaian dasar dari
transistor yang digunakan bersama-sama dengan hasil modulasi
yang ditunjukkan dalam gambar 12.12.
Apabila putaran motor dalam arah CW tersebut terjadi pada
saat transistor B dan transistor C meneruskan arus listrik
pada collectornya, maka :
- Untuk berputar dalam arah CW tersebut, transistor B
dan transistor C harus dalam keadaan menghantar arus
listrik pada collectornya, sehingga akan terjadi
aliran arus listrik melalui suplai +, transistor C,
melalui motor, transistor B dan akhinya ke suplai -.
- Arus free whelling mengalir dari motor melalui diode
A, transistor C, dan akhirnya kembali ke motor.
- Arus regenerasi (pada saat terjadinya pengereman)
mengalir dari motor, melalui diode C, suplai +, dan
suplai -, diode B dan akhirnya kembali kemotor.

BAB XIII
ELEKTRONIKA DAYA DALAM HVDC13.1 PENDAHLUAN

Sistem transmisi tegangan tinggi arus searah (HVDC)
mempunyai beberapa kelebihan dibandingkan system transmisi
tegangan tinggi arus bolak-balik, antara lain : jumlah
koduktor yang digunakan lebih sedikit dan stress tegangan yang
ditimbulkan lebih kecil. Walaupun demekian, keterbatasan dalam
perubahan nilai tegangan masih membuat system transmisi arus
searah kurang umum digunakan.
Penggunaan saluran transmisi DC dimungkinkan berdasarkan
atas pertimbangan teknis sebagai berikut :
a. Route saluran transmisi sanagat panjang
b. Intrkoneksi dari suatu system yang berbeda frekuensi
c. Kabel laut yang cukup panjang
d. Stabilisasi dari jaringan yang sudah ada
e. Pengurangan arus hubung singkat pada system penerima yang
menggunakan arus bolak-balik.
Suatu system transmisi tegangan tinggi arus searah
memerlukan converter untuk mengkonversi daya AC menjadi DC.
Thyristor dengan daya maupun tegangan yang tinggi dapat
dimanfaatkan untuk peralatan converter. System transmisi
tegangan tinggi arus searah secara umum terdiri dari sumber
tegangan, filter AC, transformator, thyristor, smoothing
reactor dan medium transmisi.
Dalam BAB 13 ini akan dibahas peranan Elektronika Daya
dalam HVDC dengan memanfaatkan converter AC-DC dan inverter
DC-AC. Dengan demikian maka :
1. Menganalisis tegangan rata-rata DC, Arus DC, dan Daya
Output DC, dengan menggunakan penyearah jembatan tiga
fase tanpa control, dan terkontrol

2. Menganalisis tegangan rata-rata AC, Arus AC daya output
AC, dengan menggunakan inverter DC-AC.
Komponen-komponen utama dari suatu system tegangan tinggi
arus searah adalah stasiun converter di sisi pengirim yang
disebut inverter, medium transmisi dan elektroda. Stasiun
converter ini memiliki beberapa komponen peralatan sebagi
berikut :
a. Thyristor
b. Transformator
c. Filter AC dan Kapasitor Bank Filter AC
d. Smoothing Reaktor
e. Filter DC
f. Sistem Kontrol
g. Medium Transmisi
Untuk transmisi daya listrik di atas daratan, medium
transmisi paling sering yang digunakan adalah saluran udara
(overhead). Saluran overhead ini secara normal berkutub dua,
yaitu dua konduktor dengan polaritas yang berbeda. Kabel
tegangan tinggi arus searah secara normal digunakan untuk
transmisi bawah laut. Paling umum digunakanjenis kabel padat
(solid) dan oil-filled. Jenis yang padat banyak digunakan
karena paling ekonomis.
Beberapa piranti lain juga diperlukan oleh stasiun
converter, seperti pemutus kontak, transducer tegangan dan
arus, surge arrester, dan lain-lain. Gambar 13.1
memperlihatkan rangkaian peralatan-peralatan pada stasiun
converter.

Gambar 13.1 Stasiun Konverter
Beberapa masalah dalam transmisi arus bolak-balik yang
saat ini dapat diatasi dengan transmisi arus searah antara
lain :
1. Transmisi tenaga listrik dengan kabel tanah ataupun kabel
laut melalui jarak-jarak yang jauh dengan tegangan tinggi
arus bolak-balik memerlukan daya reaktif yang sangat
besar. Masalah ini tidak ada pada tegangan tinggi arus
searah.
2. Operasi parallel dari dua system arus bolak-balik melalui
interkoneksi dapat mengalami masalah-masalah stabilitas,
terutama dengan daya-daya besar. Bilamana interkoneksi
dilakukan dengan tegangan tinggi arus searah maka
stabilitas tidak menjadi masalah.
3.2 KONVERTER AC-DC
Pada umumnya penyearah atau converter yang dimaksud ialah
peubah tegangan tinggi arus bolak-balik menjadi tegangan

tinggi arus searah. Komponen utama yang umum digunakan ialah
diode dan thyristor (SCR).
Apabila ditinjau dari jenis komponen yang digunakan maka
dikenal penyearah tidak terkendali dan penyearah terkendali.
Dalam makalah ini akan digunakan penyearah jembatan tiga fasa
tanpa control dan semi control.
13.3 PARAMETER-PARAMETER PENYEARAH
Penyearah adalah suatu rangkaian yang mengubah system
tegangan arus bolak-balik menjadi system tegangan arus
searah\. Konverter ini terdiri dari rangkaian diode untuk
mengubah sinyal arus bolak-balik menjadi sinyal arus searah.
Rangkaian penyearah dibutuhkan terutama untuk suplai daya arus
searah bagi rangkaian pengendali atau rangkaian-rangkaian
elektronika lainnya. Terdapat bebrapa tipe penyarah, dan
penampilannya dievaluasi dari parameter-parameter berikut :
Tegangan keluaran rata-rata, Vdc adalah :
Vdc=1T∫0
T
v (t )dt. (13-1)
Arus keluaran rata-rata, Vdc adalah :
Idc=VdcR (13-2)
Efesiensi atau perbandingan penyearah :
η=Pdc−outPac−¿
(13-3)
Daya masukkan ac, Pac adalah daya yang ditunjukkan oleh
pembacaan watt-meter yang dihubungkan pada rangkaian penyearah
dengan kumpara tegangan dihubungkan dengan belitan sekunder
transformator.

Faktor Bentuk, form factor (ff) :
ff=VrmsVdc (13-4)
Factor riak (ripple factor) :
r=Vr−rmsVdc
danr=Ir−rmsIdc
ataur=(ff2−1 )1 /2(13-5)
Regulasi tegangan :
%R=Vnl−Vfl
Vflx100% (13-6)
Transformer Utilitation Factor, TUF adalah
TUF=PdcbebanStrafo
(13-7)
13.4 TEGANGAN DAN ARUS SALURAN TRANSMISI DC
Rangkaian ekivalen untuk saluran transmisi DC ditunjukkan
pada gambar 2.4 berikut :
Gambar 13.2 Diagram satu garis saluran transmisi tegangan
tinggi arus searah
Sebuah generator 3 fasa (power sistem) menyalurkan daya
ke beban pada suatu rangkaian yang seimbang adalah 3 kali daya
pada semua fasa, karena daya rangkaian penyearah tiga fasa
ditunjukkan pada gambar 13.2. Bentuk gelombang tegangan dan
P Q P
Power
System
Beban
I I
VV

aruspada tiap bagian ari gambar 13.2 ditunjukkan pada gambar
13.3pada saat D1 dan D6 konduksi, D1 dan D6 memblok tegangan
sumber Vab dengan nilai maksimum sebesar √3Vm. Dengan demikian,tiap dioda yang digunakan harus memiliki PIV sebesar √3Vm.Dari bentuk gelombang tegangan di atas maka nilai tegangan
keluaran rata-rata dapat ditentukan:
Tegangan keluaran rata-rata :
Vdc=3π ∫
π /6
π /2
VmSin(ωt+π6 )dωt=
3√3Vmπ =1,654xVm (13-8)
Tegangan efektif pada beban adalah :
Vrms = [3π∫π6
π2
Vm2sin2(ωt+π6 )dωt]
1/2
= 1,6554 Vm (13-9)
Arus keluaran penyearah adalah :
Idc=3√3πR
Vm (13-10)

Gambar 13.3 Penyearah Jembatan Tiga Fasa Gelombang Penuh Tanpa
Control
Strafo = 3VrmsIrms, dimana Vrms = Vm/√2,sedang arus padalilitan sekunder trafo dapat tentukan dengan :
Irms=[√3VmπR ∫π6
π2
sin2(ωt+π6 )dωt+∫
π2
5π6
sin2(ωt−π6 )dωt]
12
=1,3517Vm/R
Dengan demikian,
Vm=2,8673Vm
2
R(13-12)
Dari nilai-nilai besaran tersebut di atas dapat
ditentukan parameter-parameter penyearah sebagai berikut :
Faktor bentuk :
FF=Vrms
Vdc=1,000885 (13-13)
Factor riak :
r=√[FF−1 ] = 0,042 (13-14)
faktor penyearah :
p=Pdc−out
Pac−¿
=0,998 (13-15)
dimana : Pdc−out=
(3√3π
Vm)2
R , Pac−¿=
(1,6554Vm)2
R
Transformator Utilitation Faktor :
TUF=Pdc−beban
Strafo=0,954 (13-16)

dimana : Pdc−out=
(3√3π
Vm)2
R Strafo=
(2,8673Vm)2
R
Dari beberapa parameter yang ada Nampak bahwasanya
penyearah tiga fasa sistem jembatan ini memiliki penampilan
yang jauh baik disbanding penyearah sebelumnya. selain
efesiensi dan TUF yang lebih baik serta faktor riak yang
sangat rendah pada belitan transformator sekunder, tidak akan
terjadi saturasi magnetisasi DC, karena pada lilitan
sekundernya dialiri oleh arus bolak-balik. Dengan faktor riak
yang rendah ini akan memudahkan untuk membuat filter guna
memperoleh tegangan DC yang benar-benar rata.
13.5 PENYEARAH JEMBATAN TIGA FASA SEMI CONTROL
Penyearah jembatan tiga fasa semi control adalah
mengontrol setengan gelombang saja, yang positif atau
negative. dengan semi control ini harga tegangan dc rata-rata
tidak dapat mencapai harga nol. Pada kontrol penuh, baik
gelombang positif maupun gelombang negative dikontrol
keduanya.
Penyearah semi control ini ditunjukkan pada gambar 13.4 dengan
tegangan dc rata-rata dari penyearah ini adalah :
Vdc=3√32π
Vm ¿ (13.17)
Bila diambil VdQ=3√32π
Vm, maka persamaan (17) menjadi
Vdc=12Vdo¿ (13.18)
Jika sudut overlap diabaikan, maka persamaan (18) menjadi

Vdc=12Vdo [1+cosa ] (13.19)
pada semua fasa adalah sama. Jika besarnya tegangan ke netral
Vp dan arus fasa Ip untuk suatu beban yang terhubung Y, maka
daya 3-fasa total adalah :
P=3VpIpcos∅ (13.20)
Dimana ϕ adalah sudut fasa dengan arus fase tertinggal
terhadap tegangan fasa. Jika VL dan IL berturut-turut adalah
besarnya tegangan antar-saluran dan arus saluran, maka :
Vp=VL√3 dan
Ip=IL (13.21)
Total vars adalah :
Q=3VpIpsin∅ (13.22)
Daya Voltamper dari beban adalah :
|S|=√P2+Q2 = 3VpIp (13.23)
Untuk daya pada saluran transmisi DC adalah :
Pdc=VdcxIdc (13.24)
Dan daya yang diserap oleh beban adalah :
Pbeban=V'dcxI
'dc (13.25)
Gambar 13.4 Konverter Jembatan 3 Fasa Semi Kontrol

13.6 ANALISI RANGKAIAN
DIAGRAM SATU GARIS SALURAN TRANSMISI DC
Gambar 13.5 Diagram Satu Garis Saluran Transmisi Dc
Dari diagram satu garis diatas terlihat bahwa daya yang
disalurkan sebesar 300 MW, tegangan pada sisi penerimaan
converter sebesar 250 kV, jarak saluran transmisi 300 km
dimana akan ditentukan tegangan arus searah pada sisi
pengiriman (sending) converter pada sisi penerimaan.
ANALISI
A. Penyearah Jembatan Tiga Fasa Tanpa Kontrol
Em=√2xVrms=√2x250KV=353,553KV
Tegangan keluaran rata-rata (Vdc) ialah :
Vdo=1,654xEm=1,654x353,553kV=584,777kV
Tegangan efektif pada beban (Vrms) ialah :
Vrms=1,6554xEm=1,6554x353,553kV=585,272kV
PDC=PAC=300MW
Besarnya arus yang akan mengalir melalui kabel ialah :
PDC=VDCxIDC
Transformator
300 KM Transformator
300 MW
R
S
T
AC
DC AC
DC

IDC=Pdc
Vdc= 300MW584,777KV
=513,016Ampere=0,513KA
Regulasi tegangan adalah :
VR=¿Vdo−(IDCxRDC)
= 584,77 - ( 0,0255 x 0,3048 x 300 )
= 584,777 – 1,196 = 583,581 KV
Jatuh tegangan atau Drop Voltage adalah :
∆V = VDC - VR
= 584,777 – 583,581 = 1,196 KV
Dalam persen,
1,196583,581
x100%=0,21%
B. Penyearah Jembatan 3 Fasa Semi Kontrol a=20o
Tegangan keluaran rata-rata(VDC) ialah :
VDC = 12VDO¿
= 12584,777 ¿
= 292,389 x 1,939
= 566,943 KV
Besarnya arus yang akan mengalir melalui kabel ialah :
IDC=Pdc
Vdc=
300MW566,943KV
=529,154Ampere=0,529KA
Regulasi tegangan adalah :
VR = VDO – ( IDC x RDC)
= 566,943 – ( 0,529 x 0,0255 x 0,3048 x 300 )
= 566,943 – 1,233 = 565,71 KV
Jatuh tegangan atau Drop Voltage adalah :
∆V = VDC - VR
= 516,359 – 516,007 = 0,352
Jatuh tegangan atau Drop Voltage adalah :
∆V = VDC - VR
= 566,943 – 565,71 = 1,233 KV
Dalam Persen,
1,233565,71
x100%=0,218 %
a=40o
Tegangan keluaran rata-rata(VDC) ialah :
VDC = 12VDO¿
= 12584,777 ¿
= 292,389 x 1,766
= 516,359 KV
Besarnya arus yang akan mengalir melalui kabel ialah :
IDC=Pdc
Vdc= 300MW516,359KV
=580,991Ampere=0,58KA
Regulasi tegangan adalah :
VR = VDO – ( IDC x RDC)
= 516,359 – ( 0,58 x 0,0255 x 0,3048 x 300 )
= 516,359 – 1,352 = 516,007 KV
Jatuh tegangan atau Drop Voltage adalah :
∆V = VDC - VR
= 516,359 – 516,007 = 0,352 KV
Dalam Persen,

0,352516,007
x100%=0,068%
a=60o
Tegangan keluaran rata-rata(VDC) ialah :
VDC = 12VDO¿
= 12584,777 ¿
= 292,389 x 1,5
= 438,584 KV
Besarnya arus yang akan mengalir melalui kabel ialah :
IDC=Pdc
Vdc= 300MW438,584KV
=684,019Ampere=0,684KA
Regulasi tegangan adalah :
VR = VDO – ( IDC x RDC)
= 438,584 – ( 0,684 x 0,0255 x 0,3048 x 300 )
= 438,584 – 1,595 = 436,989 KV
Jatuh tegangan atau Drop Voltage adalah :
∆V = VDC - VR
= 438,584 – 436,989 = 1,595 KV
Dalam Persen,
1,595436,989
x100%=0,365%
13.7 KESIMPULAN
Dari hasil analisis di atas dapat disimpulkan sebagai
berikut :
1. Jika semakin besar α penyuluhan pada thyristor, maka
regulasi tegangan akan semakin kecil. Sebaliknya, semakin
kecil α penyuluhan pada thyristor, maka regulasi tegangan

akan semakin besar. Hal ini berlaku hanya jika
menggunakan semi control.
2. Sudut pengoperasian thyristor yang optimal adalah 0 – 60o,
jika dioperasikan antara sudut 60o sampai sudut 120o, maka
system tidak akan optimal. Hal tersebut dikarenakan rugi
daya atau losses pada jaringan yang besar.
BAB XIV
ELEKTRONIKA DAYA DALAM SAKELAR STATIK14.1 PENDAHULUAN
Thyristor dapat dinyalakan dan dimatikan dalam beberapa
mili detik yang bias mengoperasikan sakllar cepat yang bias
menggantikan saklar sirkuit breaker mekanik dan elektro
mekanik. Untuk penggunaan daya dc daya rendah, transistor daya

dapat juga dipakai sebagai saklar-saklar. Saklar static
memiliki keuntungan-keuntungan (contoh : kecepatan pensaklaran
yang tinggi, tidak ada bagian bergerak, dan tidak ada kontak
(Loncatan bunga api) yang terjadi terhadap penutupan.
Sebagai tambahan untuk penggunaan sebagai saklar static
rangkaian thyristor (atau transistor) dapat dirancang untuk
memperoleh, time delay, latching, arus rendah dan lebih dan
pendeteksian tegangan. Transduser untuk pendeteksi mekanik,
listrik, posisi, pendekatan dan lain-lain. Sinyal-sinyal dapat
diperoleh dengan gate untuk Thyristor (atau transistor-
transistor).
Saklar static dpat diklasifikasikan ke 2 tipe yaitu Saklar AC
dan Saklar DC
1. Saklar AC dibagi atas satu fasa dan tiga fasa
Dalam hal sebagai saklar AC, thyristor0thyristor adalah
komutasi tipe natural dan kecepatan pensaklaran dibatasi
oleh frekuensi dari sumber AC dan waktu pematikan dari
thyristor-thyristor.
2. Saklar DC adalah komutasi paksa dan kecepatan pensaklaran
tergantung pada rangkaian komutasi dan waktu pematikan
dari thyristor.
Saklar DC dan saklar AC dapat dilihat pada gambar 14.1 yang
merupakan suatu gambaran prinsip dasar suatu saklar static
~~
Vo (t)Io (t)
Vi (t)Ii (t)
Saklar Statik AC
=
Vi (t)Ii (t)
Vo (t)Io (t)
Saklar Statik DC

Gambar 14.1 Prinsip dasar saklar static
14.2 ANALISIS TIPE-TIPE SAKLAR STATIS
14.2.1 Single – Phase AC – Switches
Bilamana
i (t )=ℑsinωt (14-1)
Is=[ 22π∫0π
ℑ2sin2ωtdωt]1 /2
= ℑ
√2(14-2)
Is=22π∫0
π
ℑsinωtd (ωt)= ℑπ (14-3)
Irms=[ 22π∫0π
ℑ2sin2ωtd (ωt)]1 /2
= ℑ2
(14-4)
Rangkaian seperti pada gambar 11.1(a), dimana dua
thyristor dihubungkan ddalam parallel. Thyristor T1 dinyalakan
pada ωt = 0, dan thyristor T2 dinyalakan pada ωt = π. Tegangan
= =

keluaran adalah sama tegangan masuk thyristor beraksi sebagai
saklar-saklar adalah komutasi Line. Gelombang-gelombang untuk
tegangan input tegangan ouput, arus keluaran seperti pada
gambar 14.1(b). Dengan beban induktif T1 akan menyala bila arus
lewat melalui zero crossing selama setengah siklus positif
dari tegangan input T2 menyala pada saat arus lewat melalui
zero crossing selama setengah siklus negative dari tegangan
input. Pulsa trigger untuk T1
14.2.2 Analisa Tipe-Tipe Yang Lain
a. Single Phase Bridge Diode and Thyristor AC – Switch
b. Single Phase Bridge Rectifier and Thyristor AC – Switch
Bilamana arus line instantaneous adalah (t )=Imsinωt , maka
persamaan (14.1), diperoleh Is=[ 22π∫0πIm
2sin2ωtd(ωt)]1/2
=Im
√2 , dan
Iav=Im
π, serta Irms=
Im2
sesuai dengan rumus (14.2) dan rumus
(14.3)
c. AC Switch 3 Phase
Gambar 14.5 Sakelar AC – 3 Phase
14.3 SAKELAR STATIK TIPE DC

Tegangan input adalah DC-- Transistor Daya, Thyristor
dapat dipakai
Gambar 14.6 Sakelar Statik Tipe DC
Pada gambar 14.7 berikut beberapa tipe-tipe AC solid state.
Relay dan DC solid state relay yang terkait fungsi dan
penggunaanya.
a) DC Solid State – Relay
b) AC Solid State - Relay
Gambar 14.7 AC dan DC Solid State Relay
14.4 RANCANGAN DARI STATIC SWITCHES
Sakelar Solid State adalah cocok untuk komersial denganmembatasi tegangan dan arus dengan rating antara 1 A – 50 A,tegangan sampai 440 Volt. Kalau perlu merancang SSR ( StaticSwitches Relay ). Sesuai dengan keinginan, rancangan sederhanadiinginkan menghitung rating tegangan dan arus sesuai denganpiranti daya
Prosedur Rancangan Sebagai Berikut
Contoh :
i (t )=VS√LC sinωtVL (t )=VS¿
dimana ω=1
√LC
setelah t=t0=π√LC, arus pelepasan menjadi zero, dan

1 ϕ AC Switch seperti gambar dipaki 120 V 60 Hz dan bebaninduktif, Daya beban 5 KW pf = 0,88 ( lagging)
a) Hitung rating V dan I dari Thyristorb) Hitung sudut penyalaan thyristor
P0 = 5 kw = 5000 W , pf = 0,88 lag, Vs = 120 v
a) P0=√3VIcos∅ Im=√2P0
Vcos∅= √2.5000120x0,88=66,96A
persamaan (5.2) Iav=Im
π¿
Irms=[ 12π∫0πIm
2sin2ωtdωt]1/2
=Im
2
Iav=66,96π
=21,31A
Irms=66,962
=33,48A
PIV=√2x120=169,7v
b) cos ϕ = 0,88 ϕ = 28,36o
sudut penyalaan dari T1 = α1 = 28,360 T2 - α2 = 180 +28,360
Contoh Soal :Sebuah AC Switch 1 ϕ seperti gambar 5.1a dipakai pada 120 V,60 Hz sebagai sumber. Beban induktif daya beban 5 kw, pf = 0,88laggingHitung:
a) Tegangan dan arus rating pada thyristorb) Sudut penyalaan Thyristor
I. Analisis:

a. Diketahui : AC Switch 1 ϕ Vs = 120 V, f = 60 Hz, P = 5kw, pf = 0,88 lag
b. Ditanyakan : 1. rus dan tegangan rating 2. SudutPenyalaan
II. Rencana :
Po=√3VIcos∅ Im=√2Po
Vcos∅
Irms=Imπ
Iav=12π∫0
πImsinωtdωt=
Im
π
Irms=[ 12π∫1π
Im2sin2ωtdωt]
1 /2
=Im2
PIV=√2xVs
III. Penyelesaian :
a) Im=√2P0
Vcos∅= √25000120x0,88=66,96A
Iav=66,96π
=21,31A
Irms=66,962
=33,48A
PIV=√x120=169,7Vb) Cos ϕ = 0,88 ϕ = 28,360
T1 = α1 = 28,360 T2 - α2 = 180 + 28,360 = 208,30
14.5 KESIMPULAN
Sakelar solid state AC – DC memiliki sejumlah keuntungan
terhadap sakelar / relay yang konventional. Setelah dibuat
semikonduktor dan rangkaian terintegrasi sakelar state dapat
dihitung dengan range luas. Pada penggunaan control industry.

Sakelar stattik dapat diintegrasi dengan digital atau system
control computer.