Application of Artificial Intelligence to Rotating Machine ...

ARTICLE IN PRESS
International Journal of Mechanical Sciences 51 (2009) 256–268
Contents lists available at ScienceDirect
International Journal of Mechanical Sciences
0020-74
doi:10.1
� Corr
E-m
journal homepage: www.elsevier.com/locate/ijmecsci
Dynamic analysis of a rotating beam subjected to repeating axial andtransverse forces for simulating a lathing process
Y.M. Huang �, M.L. Yang
Department of Mechanical Engineering, National Central University, Chung-Li, Taiwan 320, ROC
a r t i c l e i n f o
Article history:
Received 10 March 2008
Received in revised form
28 November 2008
Accepted 11 December 2008Available online 25 December 2008
Keywords:
Vibration of rotating shaft
Rayleigh beam
Repeating external forces
Stability analysis
03/$ - see front matter & 2009 Elsevier Ltd. A
016/j.ijmecsci.2008.12.005
esponding author. Tel.: +886 3 426 7345; fax:
ail address: [email protected] (Y.M. Hu
a b s t r a c t
The dynamics of the workpiece of a lathe is simulated in the presented paper. A rotating Rayleigh beam
is chosen as a simple model of the workpiece. The beam or the workpiece is subjected to forces from the
cutting tool of the lathe. The external forces, in transverse and axial directions, are traveling in a
repeating or periodic motion. The force in the axial direction is a large cutting force resulting in coupled
bending deformation while forces in the transverse directions are the contacting forces.
In this paper, the governing equations of the rotating Rayleigh beam are derived by Hamilton’s
principle. The external, periodic forces resulted from the tool are expressed in Fourier series. Galerkin’s
method is then chosen for disceretizing the partial differential equations. The instability regions of the
responses are determined by using the method of multiple scales and the Floquet theory. Fast Fourier
transform gives the frequency domain responses for examining the dynamic characteristics. The
numerical results are discussed. Parametric studies are also performed.
& 2009 Elsevier Ltd. All rights reserved.
1. Introduction
High-speed machining processes are popular recently. Whenthe machining speed is increased, chatter becomes an importantsource of inaccuracy. The phenomenon of chatter usually comesfrom the dynamic coupling effects of the machining tool and theworkpiece. This manuscript then concentrates on the character-istics of a rotating beam subjected to external periodic axial andtransverse forces for simulating the dynamic responses of thelathing workpiece.
Many related problems arise from the dynamics of civilstructures such as bridges. Early investigation of a moving forceon the beam can be traced back to the paper by Timoshenko [1].More recently, Katz et al. [2] studied the dynamic characteristicsof a nonrotating Euler beam to a motion-dependent movingforce and showed the increasing stiffness of the beam due to theforce. Katz et al. [3] also looked into the vibration problem of arotating beam based on different beam models affected by movingloads. Huang and Chen [4] focused on the critical speed of amoving harmonic force to a spinning orthotropic beam. Argentoand Scott [5], Argento [6], and Argento and Morano [7] havepresented a series of papers about Rayleigh or Timoshenko beamssubject to accelerating, harmonic, displacement dependent, anddistributed forces. In their papers, the time responses of therotating beam and their stability are obtained by numerical
ll rights reserved.
+886 3 425 4501.
ang).
methods. A paper written by Lee et al. [8] focused on theresponses of a rotating Timoshenko beam to external axialand transverse forces. A manuscript by Lee [9] discussed howthe present of a constant axial force affects the transient responseof the rotating shaft. The compressive axial force tends tocause drastic changes in the deflection. Huang and Chang [10]and Huang and Lee [11] have contributed methods of simulatingthe vibration of the workpiece of a lathing machine by a rotatingRayleigh beam subjected to a motion-dependent load. Here,the long-term time responses of the rotating beam can beobtained by applying a periodic load [11]. Following the previouswork, the transient responses of the workpiece of a lathingmachine were obtained by analyzing the coupled system of arotating shaft and a simple subsystem, including a mass and aspring, representing the dynamics of the cutting tool [12]. In thepaper by Katz [13], the transient dynamic response of a rotatingshaft subject to an axially moving and rotating load wasinvestigated. Cheng and Lin [14] introduced shear force termsinto the rotating Rayleigh beam model and studied the naturalfrequencies and the critical speed under the influence of movingforces. A finite-element method was also used to solve for therotating beam with nonlinear characteristics [15,16]. A series ofmanuscripts [17,18] have presented the transient responses of arotating Timoshenko beam subject to three-dimensional movingloads.
For simulating the dynamics of the workpiece of a lathe, arotating Rayleigh beam is considered here. This manuscriptintroduces external repeating, moving forces, in the axial andtransverse directions, for representing the main cutting and the

ARTICLE IN PRESS
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268 257
contacting forces due to the cutting tool to the beam. Thetransverse moving forces are assumed to be motion dependentand may yield instability to the system. Compared with Ref. [11],an additional moving force, in the axial direction, is introduced tothe system for simulating the cutting force from the tool.Existence of the axial force may also result in instability motion.Instead of short term, transient responses analyzed in [17,18]; thismanuscript focuses on the long-term dynamic characteristics andstability of the rotating beam. Here, the method of multiple scalesis employed to determine the stability characteristics of thesystem. Furthermore, fast Fourier transformation (FFT) is adoptedto perform the frequency domain analysis of the responses of thebeam. Numerical results are then presented and parametricstudies are also given in this manuscript.
2. Equations of motion of the rotating beam
In this manuscript, a rotating beam with simply supportedboundaries, shown in Fig. 1, is chosen to represent a latheworkpiece. The radius and the length of the beam are denotedas r and ‘, respectively. The beam rotates about the axial direction(x-axis) in a constant angular rotating speed O. Coordinates y andz are inertial frames in the transverse directions. Notation V(x, t)and W(x, t) represent transverse displacements of the beam in they and z directions, respectively.
2.1. Hamilton’s principle
The rotating angular vector of the flexible beam can beexpressed as [10]
~o ¼ O cos y cos f~iþ �@y@tþO cos y sin f
� �~jþ �
@f@tþO sin y
� �~k
(1)
where y ¼ @W(x, t)/@x and f ¼ @V(x, t)/@t are slopes in the y and z
directions due to bending, respectively. Previous expression ofrotating angular velocity is further reduced to
~o ¼ O~iþ �@y@tþOf
� �~jþ �
@f@tþOy
� �~k (2)
by assuming small deflections.The total kinetic energy of the rotating beam, based on the
Rayleigh beam theory, is written as
T ¼1
2
Z ‘
0rA
@V
@t
� �2
þ@W
@t
� �2" #(
þ rI 2O2þ �
@y@tþOf
� �2"
þ �@f@tþOy
� �2#)
dx (3)
Ω
vt
z
y
vt
z
y
z
y
vt
z
y
x
2px
yf
zf
Fig. 1. The schematic diagram of the beam and the external forces.
where r is the density per unit length, A the cross-section area,and I the area moment of inertia for bending of the beam. Inexpression (3), the kinetic energy due to bending translation andthe rotating kinetic energy from bending slopes are both takeninto account. On the other hand, the potential energy of thebeam is
U ¼1
2
Z ‘
oEI
@2V
@x2
!2
þ@2W
@x2
!224
35
8<: þ P
@V
@x
� �2
þ@W
@x
� �2" #)
dx
�
Z ‘
0½FyV þ FzW �dx (4)
in which E is Young’s modulus of the beam material, P(x, t) is theinternal axial tension, Fy(x, t) and Fz(x, t) are the externaltransverse forces resulted from the lathe cutting process. In Eq.(4), the first part in the first integral represents the potentialenergy due to bending, the second part is that from axialdeformation, and the second integral is the energy from externalforces.
The equations of motion of the rotating beam can be obtainedby substituting energies T and U in the formulation of theHamilton principle
dZ t2
t1
ðT � UÞdt ¼ 0 (5)
The equations of motion are then expressed in the form of
EIq4V
qx4� P
q2V
qx2þ rA
q2V
qt2� rI
q4V
qx2qt2� 2rIO
q3W
qx2qt
þrIO2q2V
qx2¼ Fyðx; tÞ
EIq4W
qx4� P
q2W
qx2þ rA
q2W
qt2� rI
q4W
qx2qt2þ 2rIO
q3V
qx2qt
þrIO2q2W
qx2¼ Fzðx; tÞ
8>>>>>>>>>>>>><>>>>>>>>>>>>>:
(6)
The first and third terms in each equation can be foundfrom Euler beam formulation. The second term represents theeffect resulted form internal axial force P(x, t). The last threeterms, in the left-hand side of each equation, are due torotary inertia, the Coriolis effect, and the centripetal effect,respectively.
2.2. Dimensionless equations of motion
For simplifying the analysis, we define the following dimen-sionless system variables:
xn ¼ x=‘; tn ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiEI=rA
p=‘2
� �t
Vn¼ V=‘; Wn
¼W=‘
rn ¼ffiffiffiffiffiffiffiI=A
p=‘; On
¼ O= b21
ffiffiffiffiffiffiffiffiffiffiffiffiffiEI=rA
p� �Fn
y ¼ ð‘2=EIÞFy; Fn
z ¼ ð‘2=EIÞFz
Pn¼ ð‘2=EIÞP
(7)
Herein, the eigenvalues bm (m ¼ 1,2,y) of the nonrotating,simply supported Euler beam and the corresponding dimension-less parameters bn
m are expressed as
bm ¼ mp=‘ ¼ffiffiffiffiffiffiffiffiffiffioEmp
ffiffiffiffiffiffiffirA
EI
4
rand bn
m ¼ bm‘ ¼ mp (8)

ARTICLE IN PRESS
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268258
with oEm being the mth natural frequency. Thus, the dimension-less equations of motion become
Vn0000� PnVn00
þ €Vn� rn2 €V
n00
� 2rn2Onbn21_Wn00
þrn2On2bn41 Vn00
¼ Fny
Wn0000� PnWn00
þ €Wn� rn2 €W
n00
þ 2rn2Onbn21_Vn00
þrn2On2bn41 Wn00
¼ Fnz
8>>>>>><>>>>>>:
(9)
In above equations, dot means the derivative respect to thevariable t* and prime indicates the derivative respect to thevariable x*.
3. External forces
For simulating the cutting process of the lathe, the externalforces are assumed to move along the longitudinal direction of thebeam with constant velocity v. The schematic diagram of theapplied forces is given in Fig. 1. After the tool finishes one cycle ofcutting, it quickly goes back to the original position and starts anew cycle. Therefore, the tool actually yields external repeating orperiodic forces to the rotating beam. The lathe tool can result intwo types of forces to the beam, that is, the main cutting axialforce Px and the transverse contacting forces Fy and Fz.
l
vt
l
vt
l
vt
l
vt
l
vt
l
vtvt
2 xp xpxp
Fig. 2. The axial force and the reactions.
3.1. The transverse forces
Consider the external transverse forces Fy and Fz representingcontacting forces due to the cutting tool of the lathe workpieceand moving along the x direction with constant speed v. Theforces start from x ¼ 0, travel to the end point x ¼ ‘, and take time‘1�‘/v before moving backward to the starting point x ¼ 0. Theseforces can travel in this pattern in a repeating manner and giveperiodic excitations to the beam. Define vn ¼ ð‘=
ffiffiffiffiffiffiffiffiffiffiffiffiffiEI=rA
pÞv the
dimensionless moving speed of the transverse external forces. Thetransverse forces, in the dimensionless form, to the rotating beamcan therefore be expressed as
Fny ðx
n; tnÞ ¼ f nyd tn �xn
vn
� �
Fnz ðx
n; tnÞ ¼ f nz d tn �xn
vn
� �8>>>><>>>>:
for tnp1
vnand
Fny ðx
n; tnÞ ¼ 0
Fnz ðx
n; tnÞ ¼ 0
8<: for
1
vnotnp
‘n1vn
(10)
with ‘n1 ¼ ‘1=‘. Herein, f ny ¼ ‘2=EIÞf y and f nz ¼ ‘
2=EIÞf z are dimen-
sionless force amplitudes, and d represents the unit impulsefunction. The external transverse forces are actually periodic
forces with the dimensionless forcing frequency O1 ¼ bn1‘
nc vn=
‘n1vnEC . Herein, the first dimensionless critical moving speed vn
EC ¼
‘nc bn21 =ð2pÞ is determined when O1 matches the fundamental
natural frequency of the nonrotating Euler beam. Notation ‘nc ¼ 2
is the wave length of the first mode of the simply supported Eulerbeam. Thus, the forces can be represented by Fourier series in theform of
Fny ðx
n; tnÞ ¼ f nyPNn¼0
½An cosðOntnÞ þ Bn sinðOntnÞ�
Fnz ðx
n; tnÞ ¼ f nzPNn¼0
½An cosðOntnÞ þ Bn sinðOntnÞ�
8>>>><>>>>:
(11)
with On ¼ nO1. Fourier coefficients An and Bn are functions of xn,
vn and ‘nc [11,19].
In this manuscript, the amplitude of the main contacting forcef ny is further assumed to be motion dependent because therotating beam exhibits the bending deflection Vn. On the otherhand, the force amplitude f nz is kept constant since it is muchsmall than f ny and of less importance. Then, the force amplitudesare rewritten as
f ny ¼ fn
y � g1Vnðxn; tnÞ
f nz ¼ fn
z
8<: (12)
where fn
y and fn
z are average amplitudes, g1 is a constant, thecontacting point between the forces to the beam is at xn ¼ vntn,and Vn
ðxn; tnÞ represents y displacement at xn.
3.2. The axial forces
The axial reactions exist at ends of beam because theseforces support the rotating beam against the axial cutting force2px (Fig. 2). The internal dimensionless axial force becomes
Pnðxn; tnÞ ¼
pnx �1þ 2u tn �
xn
vn
� � for tnp
1
vnand
0 for1
vnotnp
‘n1vn
8>>><>>>:
(13)
in which dimensionless pnx ¼ ð‘
2=EIÞpx is the dimensionless axialforce and u denotes the unit step function. Since the cutting forcemoves in a periodic manner, the internal axial force is also aperiodic function with forcing frequency O1. Furthermore, it canbe written in the Fourier form of
Pnðxn; tnÞ ¼ pn
x
XI
i¼0
½Ci cosðOitnÞ þ Di sinðOit
n� (14)
with Ci and Di the Fourier coefficients given in [19].
4. Discretized equations of motion
For discretizing the equations of motion, Galerkin’s method isadopted in this research. The dimensionless displacements areapproximately written in the form of
Vn¼PM
m¼1
zmðtnÞXmðxnÞ
Wn¼PM
m¼1
ZmðtnÞXmðxnÞ
8>>>><>>>>:
(15)
where zm and Zm are generalized coordinates, and M is number ofterms used in the method. The trial functions XmðxnÞ; m ¼ 1;2;. . .M, are chosen as
XmðxnÞ ¼
ffiffiffi2p
sinðbnmxnÞ (16)

ARTICLE IN PRESS
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268 259
and are bending mode shapes of the nonrotating Euler beam withsimply supported boundaries.
The equations of motion of the rotating beam subjected to thespecified external forces are transformed to ordinary differentequations
€zm þ Gm _Zm þ Kmzm þbn2
m pnx
a�mPI
i¼1
fa1mi cosðOitnÞ þ a2mi sinðOit
nÞgzm
þpn
x
anmPM
j¼1;jam
PIi¼0
½a3mji cosðOitnÞ þ a4mji sinðOit
n�bn2j zj
( )
þg1b
n21 ‘nc vn
panm‘n1vnEC
PNn¼0
f½a5mn cosðOntnÞ þ a6mn sinðOntnÞ� sinðOmtnÞgzm
þg1b
n21 ‘nc vn
panm‘n1vnEC
PMk¼1;kam
PNn¼0
½a5mkn cosðOntnÞ þ a6mkn sinðOntnÞ� sinðOktnÞzk
� �
¼fn
ybn21 ‘nc vnffiffiffi
2p
panm‘n1vnEC
PNn¼0
½a5mn cosðOntnÞ þ a6mn sinðOnt�Þ�
€Zm � Gm_zm þ KmZm þ
bn2m pn
x
a�mPIi¼1
fa1mi cosðOitnÞ þ a2mi sinðOit
nÞgZm
þpn
x
anmPM
j¼1;jam
PIi¼0
½a3mji cosðOitnÞ þ a4mji sinðOit
�Þ�b�2j Zj
( )
¼fn
z ‘nc b
n21 vnffiffiffi
2p
panm‘n1vnEC
PNn¼0
½a5mn cosðOntnÞ þ a6mn sinðOntnÞ�
8>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>:
(17)
for m ¼ 1,y,M. In the previous equations, anm ¼ ð1þ rn2bn2m Þ,
Gm ¼ ð2rn2Onbn21 bn2
m Þ=anm, Km ¼ ðbn4m � rn2On2bn4
1 bn2m Þ=anm, Ok ¼
‘nc bn21 bn
k vn=2pvnEC , and other parameters are given in [19].
5. Stability analysis
External periodic transverse and axial forces to the rotatingbeam can result in parametrically excited equations and maylead to instability even though the terms in the right-handside of Eq. (17) do not exist. Unstable motion can degrade theaccuracy of cutting and should be avoided. For simplicity, theeffects of the motion-dependent transverse force and the axialinternal force are discussed separately. Stability analysis of thehomogeneous, parametrically excited equations of motion is doneby employing an asymptotic method named the method ofmultiple scales [20].
5.1. The axial forces
First, consider only the mth mode of the vibration. Inother words, the interaction between different modes is nottaken into account. The homogeneous equations of motion arewritten as
€zm þ Gm _Zm þ Km þ �1an1C1b
n2m
anm
!PIi¼1
½Ami cosðOitn � cmiÞ�
( )zm ¼ 0
€Zm � Gm_zm þ Km þ �1
an1C1bn2m
anm
!PIi¼1
½Ami cosðOitn � cmiÞ�
( )Zm ¼ 0
8>>>>><>>>>>:
(18)
where Ami ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffia2
1mi þ a22mi
q, cmi ¼ tan�1ða2mi=a1miÞ, and �1 ¼
ðpnx Þ=ðan1C1Þ51 is a small parameter. Parameters e1 and C1
are defined for the requirement of the chosen method.Note that system parameter g1 in Eq. (17) is set to zero sincethe stability due to only the axial force is investigated in thissection.
The key point of the method of multiple scales is theassumption of the solution including terms of differenttime scales Tn ¼ e1
nt*. More specific, the solution can beexpressed as
zmðtÞ ¼ zmð0ÞðT0; T1; . . .Þ þ �1zmð1ÞðT0; T1; . . .Þ
þ�21zmð2ÞðT0; T1; . . .Þ þ � � �
ZmðtÞ ¼ Zmð0ÞðT0; T1; � � �Þ þ �1Zmð1ÞðT0; T1; . . .Þ
þ�21Zmð2ÞðT0; T1; . . .Þ þ � � �
8>>>>><>>>>>:
(19)
From chain rule, one has the following expression ofderivatives:
d
dt�¼
@
@T0þ �1
@
@T1þ �2
1
@
@T2þ � � � ¼ D0 þ �1D1 þ �2
1D2 þ � � �
d2
dt�2¼ D2
0 þ 2�1D0D1 þ �21ðD
21 þ 2D0D2Þ þ � � �
8>>><>>>:
(20)
with Dn ¼ @[email protected] Eq. (19) into Eq. (18) and using Eq. (20) yield
complicated equations. Rearranging the equations according todifferent orders of small parameter e1 can give the followingequations:
e10 Equations:
D20zmð0Þ þ GmD0Zmð0Þ þ Kmzmð0Þ ¼ 0
D20Zmð0Þ � GmD0zmð0Þ þ KmZmð0Þ ¼ 0
8<: (21)
e11 Equations:
D20zmð1Þ þ GmD0Zmð1Þ þ Kmzmð1Þ ¼ �2D0D1zmð0Þ � GmD1Zmð0Þ
�an1C1b
n2m
anmPIi¼1
½Ami cosðOiT0 �cmiÞ�zmð0Þ
D20Zmð1Þ � GmD0zmð1Þ þ KmZmð1Þ ¼ �2D0D1Zmð0Þ � GmD1zmð0Þ
�an1C1b
n2m
anmPIi¼1
½Ami cosðOiT0 �cmiÞ�Zmð0Þ
8>>>>>>>>>>><>>>>>>>>>>>:
(22)
Note that the expressions in the left-hand side of Eqs. (21) and(22) are in the same form. Equations of 2nd and higher orders aretoo complicated to list here.
Analysis of e10 equations (21) can lead to characteristic equation
in the form of o4�(Gm
2+2Km)o2+K2m ¼ 0. Natural frequencies of
the mth mode are solutions to the characteristic equation andare denoted as om1 and om2 (om24om140). Then, the solution toEq. (21) is written as
zmð0Þ ¼ Om1 expðjom1T0Þ þ Om2 expðjom2T0Þ þ c:c:
Zmð0Þ ¼jðKm �o2
m1Þ
Gmom1Om1 expðjom1T0Þ
þjðKm �o2
m2Þ
Gmom2Om2 expðjom2T0Þ þ c:c:
8>>>>>><>>>>>>:
(23)
wherein Om1 and Om2 are complex functions of T1, T2,y and willbe discussed later. Notation c.c. represents all the correspondingcomplex conjugate terms for keeping zm(0) and Zm(0) real.

ARTICLE IN PRESS
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268260
Using Eq. (23) in the right-hand side of e11 equations (22)
results in
D20zmð1Þ þ GmD0Zmð1Þ þ Kmzmð1Þ
¼ �jðKm þo2
m1Þ
om1O0m1 expðjom1T0Þ �
jðKm þo2m2Þ
om2O0m2 expðjom2T0Þ
�an1C1b
n2m
2a�mPIi¼1
f½Ami½Om1 expðjðOi þom1ÞT0Þ
þOm1 expðjðOi �om1ÞT0Þ þ Om2 expðjðOi þom2ÞT0Þ
þOm2 expðjðOi �om2ÞT0Þ�� expð�jcmiÞ þ c:c:g
D20Zmð1Þ � GmD0zmð1Þ þ KmZmð1Þ
¼ Gm þ 2ðKm �o2
m1Þ
Gm
� �O0m1 expðjom1T0Þ
þ Gm þ 2ðKm �o2
m2Þ
Gm
� �O0m2 expðjom2T0Þ
�an1C1b
n2m
2anmPIi¼1
AmijðKm �o2
m1Þ
Gmom1Om1 expðjðOi þom1ÞT0Þ
�
�jðKm �o2
m1Þ
Gmom1Om1 expðjðOi �om1ÞT0Þ
þjðKm �o2
m2Þ
Gmom2Om2 expðjðOi þom2ÞT0Þ
�jðKm �o2
m2Þ
Gmom2Om2 expðjðOi �om2ÞT0Þ
expð�jcmiÞ þ c:c
�
8>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>:
(24)
where superscript0
means the derivative with respect to T1
and the tilde notation as in Om1 represents complex conjugate.This set of equations has the same natural frequencies asEq. (21). Therefore, resonances and unstable solutions canoccur when Oi � 2om1, Oi � 2om2, Oi � om1 þom2, orOi � om2 �om1. Possible unstable solutions are expressed inthe form of
zmð1Þ ¼ Pm1 expðjom1T0Þ þ Pm2 expðjom2T0Þ
Zmð1Þ ¼ Qm1 expðjom1T0Þ þ Qm2 expðjom2T0Þ
((25)
where Pm1, Pm2, Qm1, and Qm2 are complex functions of T1, T2,y. .Resonance conditions are discussed in different cases.
No resonance:
In the nonresonant case, substituting Eq. (25) into Eq. (24) andgrouping coefficients of expðjom1T0Þ and expðjom2T0Þ yield
ðKm �o2m1ÞPm1 þ jom1GmQm1 ¼ Rm1
�jom1GmPm1 þ ðKm �o2m1ÞQm1 ¼ Rm2
(
andðKm �o2
m2ÞPm2 þ jom2GmQm2 ¼ Sm1
�jom2GmPm2 þ ðKm �o2m2ÞQm2 ¼ Sm2
( (26)
with
Rm1 ¼ �jðKm þo2
m1Þ
om1O0m1
Rm2 ¼ Gm þ2ðKm �o2
m1Þ
Gm
� �O0m1
8>>><>>>:and
Sm1 ¼ �jðKm þo2
m2Þ
om2O0m2
Sm2 ¼ Gm þ2ðKm �o2
m2Þ
Gm
� �O0m2
8>>><>>>:
(27)
Since om1 and om2 are also natural frequencies of Eq. (24), eachset of equations in Eq. (26) is dependent equation set. In other
words, one needs
Km �o2m1 Rm1
�jom1Gm Rm2
¼ 0 and
Km �o2m2 Sm1
�jom2Gm Sm2
¼ 0 (28)
for obtaining nonzero solutions. Analyzing Eq. (28) can furtherresult in O0m1 ¼ 0 and O0m2 ¼ 0. This implies that Om1 and Om2 inEq. (23) are not functions of T1 and can be treated as constants tothe first order of e1. Therefore, the solution equation (23) to e1
0
equations is harmonic and stable:
Oi � 2om1
Let Oi ¼ 2om1 þ �1s where e1 is the small parameter introducedbefore and s is the detuning parameter. Then, right-hand side ofEq. (24) contains the following oscillatory part:
expðjðOi �om1ÞT0Þ ¼ expðjsT1Þ expðjom1T0Þ (29)
which can induce resonance and instability. Substituting thesolution Eq. (25) into Eq. (24) results in Eq. (26) with coefficientsRm1 and Rm2 expressed as
Rm1 ¼ �jðKm þo2
m1Þ
om1O0m1 �
an1C1bn2m
2anmAmiOm1 expð�jcmiÞ expðjsT1Þ
Rm2 ¼ Gm þ2ðKm �o2
m1Þ
Gm
� �O0m1 �
an1C1bn2m
2anm
�Ami�jðKm �o2
m1Þ
Gmom1Om1
� �expð�jcmiÞ expðjsT1Þ
8>>>>>>>>><>>>>>>>>>:
(30)
and coefficients Sm1 and Sm2 given in Eq. (27). Following Eq. (28)leads to
O0m1 �Gm1AmiOm1 exp j sT1 � cmi þp2
� �� �¼ 0 (31)
with
Gm1 ¼a�1C1b
�2m =2a�mð�ðKm �o2
m1Þ2=ðGmom1Þ þom1GmÞ
2GmKm þ ð2ðKm �o2m1Þ
2Þ=Gm
(32)
Solution to Eq. (31) is in the form of
Om1 ¼ d exp m1T1 þ1
2j sT1 �cmi þ
p2
� �� �(33)
where d is a complex function of T1, T2,y . Substituting Eq. (33)into Eq. (31) results in
m1 ¼ �
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiG2
m1A2mi �
1
4s2
r(34)
which yields unstable solution of Om1 for real m1. Therefore, theinstability boundaries are written as s ¼72AmiGm1 or in terms ofvelocity
vn
vnEC
¼‘n1
2ibn21
ð2om1 � 2�1AmiGm1Þ (35)
These are two straight lines surrounding the instability areawhich is a function of om1 and e1. In other words, the instabilityarea is a function of rotating speed O* and the axial forceamplitude pn
x .The other possible resonant cases Oi � 2om2, Oi � om1 þom2,
and Oi � om2 �om1 can also be analyzed similar to the previouscases. The instability boundaries are determined through theprocedure of identifying the stability conditions of parameters
ARTICLE IN PRESS
Table 1Instability boundaries for the transverse forces.
Case Detuning parameter s Instability boundaries
No resonance No instability
Oi � 2om1 Oi ¼ 2om1 þ �1s vn
vnEC
¼‘n1
2ibn21
ð2om1 � 2�1AmiGm1Þ
Oi � 2om2 Oi ¼ 2om2 þ �1s vn
vnEC
¼‘n1
2ibn21
ð2om2 � 2�1AmiGm2Þ
Oi � om1 þom2 Oi ¼ om1 þom2 þ �1s vn
vnEC
¼‘n1
2ibn21
om1 þom2 � 2�1Ami
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiGm3Gm4
p� �
Oi � om2 �om1 Oi ¼ om2 �om1 þ �1s No instability
Gm1 ¼ða�1C1b
�2m Þ=ð2a�mÞðð�ðKm �o2
m1Þ2Þ=ðGmom1Þ þom1GmÞ
2GmKm þ ð2ðKm �o2m1Þ
2Þ=ðGmÞ
, Gm2 ¼an1 C1b
n2m =2anmð�ðKm �o2
m2Þ2=ðGmom2Þ þom2GmÞ
2GmKm þ ð2ðKm �o2m2Þ
2Þ=ðGmÞ
Gm3 ¼ðan1 C1b
n2m Þ=ð2anmÞ½ð�ðKm �o2
m1ÞðKm �o2m2ÞÞ=ðGmom2Þ þom1Gm�
2GmKm þ ð2ðKm �o2m1Þ
2Þ=ðGmÞ
, Gm4 ¼ðan1 C1b
n2m Þ=ð2anmÞ½�ðKm �o2
m1ÞðKm �o2m2Þ=ðGmom1Þ þom2Gm�
2GmðKm þ 2ðKm �o2m2Þ
2Þ=Gm
Table 2Instability boundaries for the transverse forces.
Case Detuning parameter s Instability boundaries
No resonance No instability
O1 � 2om1 O1 ¼ 2om1 þ �2s vn
vnEC
¼ 4om1nbn2
1
‘n1þ‘nc b
n21 bn
m
2p ð�2BmnGm5Þ
" #�1
O2 � 2om1 O2 ¼ 2om1 þ �2s vn
vnEC
¼ 4om1nbn2
1
‘n1�‘nc b
n21 bn
m
2p ð�2BmnGm5Þ
" #�1
O1 � 2om2 O1 ¼ 2om2 þ �2s vn
vnEC
¼ 4om2nbn2
1
‘n1þ‘nc b
n21 bn
m
2p ð�2BmnGm6Þ
" #�1
O2 � 2om2 O2 ¼ 2om2 þ �2s vn
vnEC
¼ 4om2nbn2
1
‘n1�‘nc b
n21 bn
m
2p ð�2BmnGm6Þ
" #�1
O1 � om1 þom2 O1 ¼ om1 þom2 þ �2s vn
vnEC
¼ 2ðom1 þom2Þnbn2
1
‘n1þ‘nc b
n21 bn
m
2p �2Bmn
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiGm5Gm6
p" #�1
O2 � om1 þom2 O2 ¼ om2 þom2 þ �2s vn
vnEC
¼ 2ðom1 þom2Þnbn2
1
‘n1�‘nc b
n21 bn
m
2p �2Bmn
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiGm5Gm6
p" #�1
O1 � om2 �om1 O1 ¼ om2 �om1 þ �2s No instability
O2 � om2 �om1 O2 ¼ om2 �om1 þ �2s No instability
Gm5 ¼ð‘nc b
n21 =2pÞðan1 C2=2anm‘n1 Þom1Gm
2GmKm þ ð2ðKm �o2m1Þ
2Þ=ðGmÞ
; Gm6 ¼ð‘n2b
n21 =2pÞðan1 C2=2anm‘n1 Þom2Gm
2GmKm þ ð2ðKm �o2m2Þ
2Þ=ðGmÞ
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268 261
Om1 and Om2. The final results are listed in Table 1 but the detailedderivations are given in [19]. In conclusion, there are threeinstability regions for each combination of m and i.
5.2. The motion-dependent transverse forces
Consider the mth mode of the equations of motion Eq. (17)ignoring the terms including the axial forces. The simplified
equations become
€zm þ Gm _Zm þ Km þ �2an1b
n21 C2‘
nc vn
2panm‘n1vnEC
!(
�PNn¼0
fBmn½cosðO2tn þ fmnÞ � cosðO1tn þ fmnÞ�g
�zm ¼ 0
€Zm � Gm_zm þ KmZm ¼ 0
8>>>>>>><>>>>>>>:
(36)
ARTICLE IN PRESS
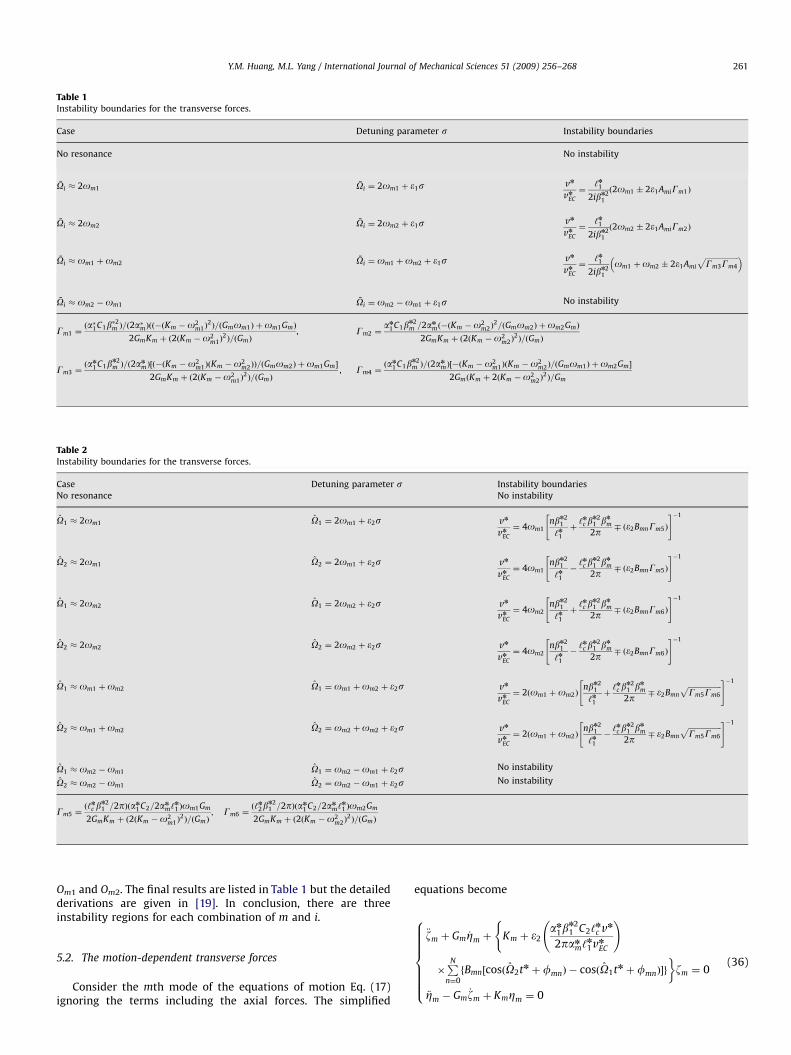
Fig. 3. Natural frequencies of the rotating Rayleigh beam.
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268262
with Bmn ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffia2
5mn þ a26mn
q, fmn ¼ tan�1ða6mn=a5mnÞ, O1 ¼ On þ Om,
O2 ¼ On � Om, a small parameter�2 ¼g1
an1
C251, and C2 for detuning
e2. Note that only the homogeneous equations are consideredhere. To analyze Eqs. (36), the method of multiple scales is againemployed. The solution to Eq. (36) is written in the same form asEq. (19). Similar procedure, to that presented in the last section, isadopted to obtain the instability boundaries. Resonances may be
found near O1 ¼ 2om1, O2 ¼ 2om1, O1 ¼ 2om2, O2 ¼ 2om2,
O1 ¼ om1 þom2; O2 ¼ om1 þom2, O1 ¼ om2 �om1, or
O2 ¼ om2 �om1. The derivations of instability boundaries arecumbersome to show here but the results are listed in Table 2. Inconclusion, there are six instability regions for each combinationof m and i.
5.3. Numerical method for stability analysis
The stability conditions obtained in the previous section can bevalidated by comparing with the results from numerical methods.Consider a linear, parametrically excited ordinary differentialequation written as
€uþ p1ðtÞ _uþ p2ðtÞu ¼ 0 (37)
wherein coefficients p1(t) and p2(t) are periodic functions withperiod T. The general solution can be expressed asu(t) ¼ c1u1(t)+c2u2(t) where the fundamental solutions u1(t) andu2(t) are linearly independent solutions. These solutions have thefollowing characteristics [20]
u1ðt þ TÞ ¼ a11u1ðtÞ þ a12u2ðtÞ
u2ðt þ TÞ ¼ a21u1ðtÞ þ a22u2ðtÞ
(or fuðt þ TÞg ¼ ½A�fuðtÞg (38)
with {u} ¼ [u1,u2]T and the constant matrix ½A� ¼a11 a12
a22 a21
" #.
Following Eq. (38), one has {u(t+nT)} ¼ [A]n{u(t)}. Consequently,the stability of the solution depends on the eigenvalues of matrix[A]. If the absolute value of any eigenvalue is greater than 1, thesystem becomes unstable. In our numerical calculation, startingfrom two independent sets of initial conditions {u(0)} ¼ [1,0]T and{u(0)} ¼ [0,1]T, the differential equations are directly integrated
from t ¼ 0 to T ¼ 2p=O1. The numerical results to these twointegrations become columns of [A]. Then, calculating theeigenvalues of [A] gives the stability condition of the system. Thismethod is usually referred to as the Floquet theory.
The equations of motion of the rotating beam, investigated inthis manuscript, are also examined by using the Floquet theory forverifying the instability determined by employing the method ofmultiple scales.
Fig. 4. Instability regions of the rotating beam to the axial force for m ¼ 1 and
i ¼ 1: (a) results by the method of multiple scale to the first order and (b) results
by the Floquet theory.
6. Numerical results and discussions
The dynamic characteristics of the rotating beam subjected toexternal repeating forces are determined and presented in thissection. Fig. 3 shows the natural frequencies om1 and om2 form ¼ 1 and 2 of the rotating beam. Each frequency of thenonrotating beam is found bifurcating into two branches whilethe rotating frequency O* increased. This is due to the effect ofintroducing rotating effects in the beam model.
6.1. Stability analysis to external axial force
In this section, the stability of the system subjected to therepeating axial force is determined and discussed. Fig. 4 illustratesthe instability regions of the responses of the beam. Fig. 4(a) gives
ARTICLE IN PRESS
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268 263
the instability boundaries, for m ¼ 1 and i ¼ 1, from the method ofmultiple scales. Each instability region is enclosed by two straightlines. There are three instability regions for each combination of m
and i as given in Table 1. A major instability region, marked by thegray area, occurs near vn=vn
EC ¼ 1 surrounded by two additionalminor instability regions. The minor regions are narrow andappear in the form of straight lines. Note that for a nonrotatingEuler beam, vn=vn
EC ¼ 1 can yield zero natural frequency andinstability. Although the minor regions can be determinedtheoretically, their widths are actually small and usually can beneglected. Fig. 4(b) shows the numerical results of the homo-genous form of Eq. (17) with g1 ¼ 0 found by the Floquet theory.Here, the unstable solutions are represented by small dots in thefigure. Because of the resolution chosen in our numerical method,some small instability regions may not be visible in Fig. 4(b). Theresults obtained by using the method of multiple scales are closeto the numerical results except a small region near vn=vn
EC ¼ 0:5due to the second-order effect.
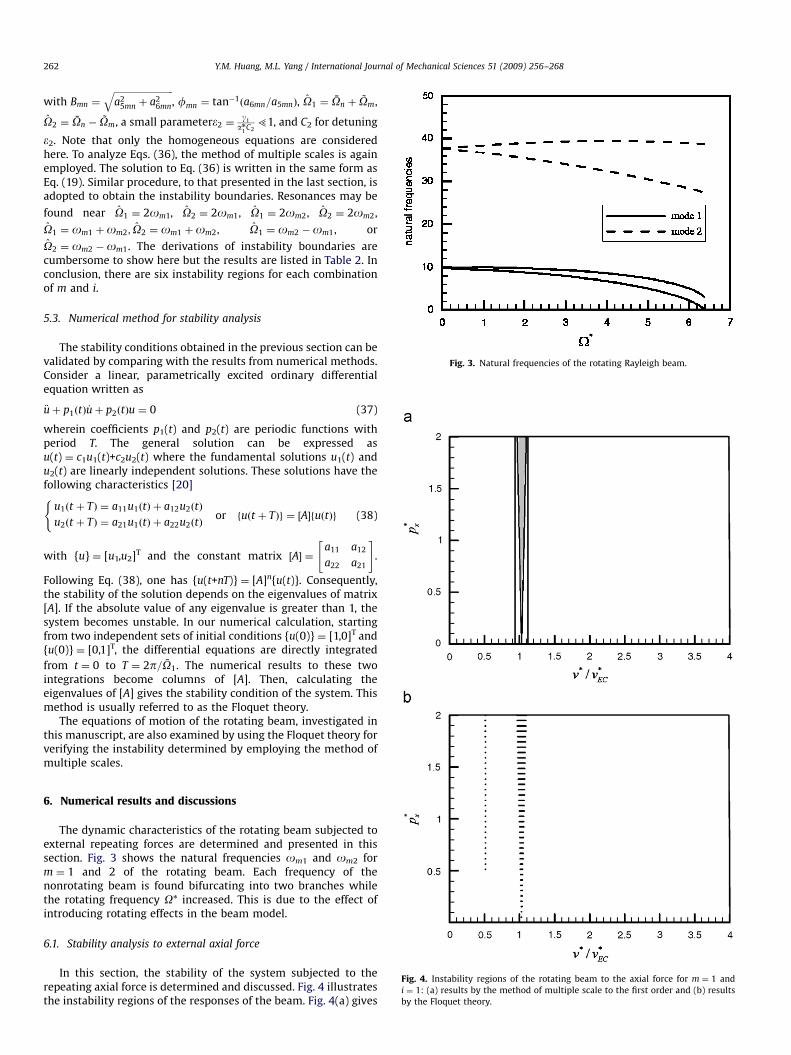
Fig. 5 shows the coupling effect of different modes m andfrequency components i in the Fourier series expansion of theperiodic axial force. Fig. 5(a) gives the instability regions fordifferent vibration modes m and i ¼ 1. Each higher mode m canbring three more regions at higher values of vn=vn
EC . This is
Fig. 6. Instability regions of the rotating beam to the axial force: (a) coupling
effects of m ¼ 1 and 2 (b) for a large axial force.
Fig. 7. Instability regions of the rotating beam to the axial force with different
rotating speeds.
Fig. 5. Instability regions of the rotating beam to the axial force: (a) for i ¼ 1 and
different m and (b) for m ¼ 1 and different i.
ARTICLE IN PRESS
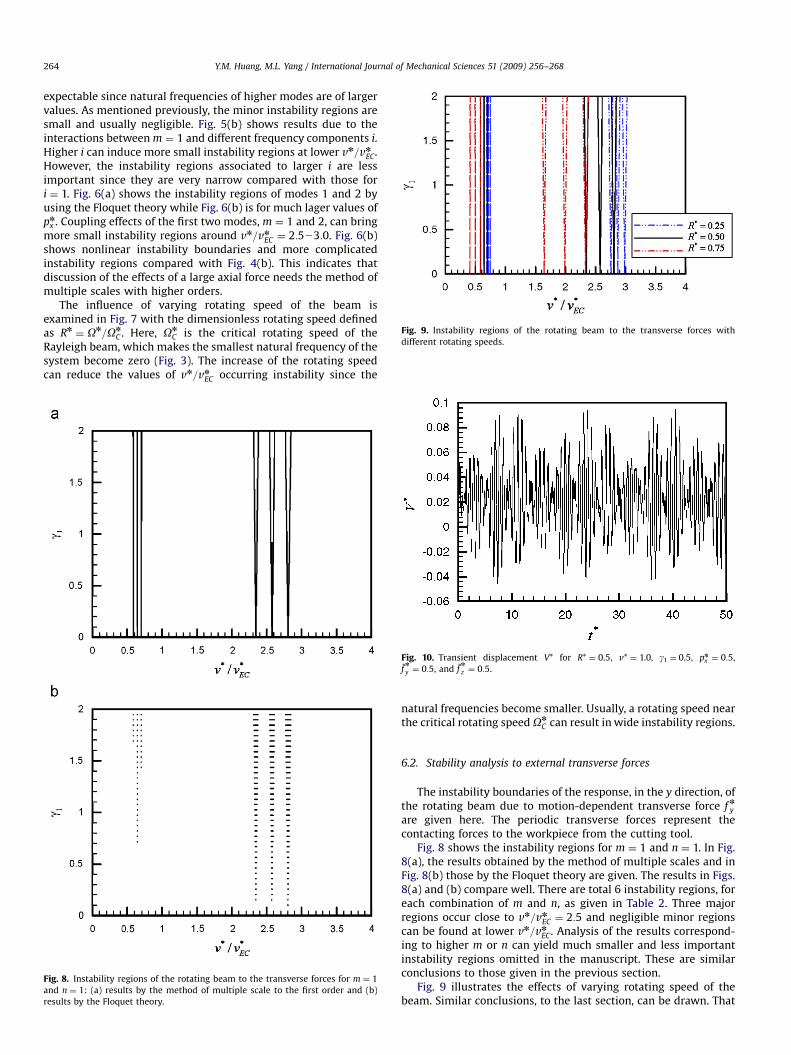
Fig. 9. Instability regions of the rotating beam to the transverse forces with
different rotating speeds.
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268264
expectable since natural frequencies of higher modes are of largervalues. As mentioned previously, the minor instability regions aresmall and usually negligible. Fig. 5(b) shows results due to theinteractions between m ¼ 1 and different frequency components i.Higher i can induce more small instability regions at lower vn=vn
EC.However, the instability regions associated to larger i are lessimportant since they are very narrow compared with those fori ¼ 1. Fig. 6(a) shows the instability regions of modes 1 and 2 byusing the Floquet theory while Fig. 6(b) is for much lager values ofpn
x . Coupling effects of the first two modes, m ¼ 1 and 2, can bringmore small instability regions around vn=vn
EC ¼ 2:523:0. Fig. 6(b)shows nonlinear instability boundaries and more complicatedinstability regions compared with Fig. 4(b). This indicates thatdiscussion of the effects of a large axial force needs the method ofmultiple scales with higher orders.
The influence of varying rotating speed of the beam isexamined in Fig. 7 with the dimensionless rotating speed definedas Rn
¼ On=OnC . Here, On
C is the critical rotating speed of theRayleigh beam, which makes the smallest natural frequency of thesystem become zero (Fig. 3). The increase of the rotating speedcan reduce the values of vn=vn
EC occurring instability since the
Fig. 10. Transient displacement V* for R* ¼ 0.5, v* ¼ 1.0, g1 ¼ 0.5, pnx ¼ 0:5,
fn
y ¼ 0:5, and fn
z ¼ 0:5.
Fig. 8. Instability regions of the rotating beam to the transverse forces for m ¼ 1
and n ¼ 1: (a) results by the method of multiple scale to the first order and (b)
results by the Floquet theory.
natural frequencies become smaller. Usually, a rotating speed nearthe critical rotating speed On
C can result in wide instability regions.
6.2. Stability analysis to external transverse forces
The instability boundaries of the response, in the y direction, ofthe rotating beam due to motion-dependent transverse force f nyare given here. The periodic transverse forces represent thecontacting forces to the workpiece from the cutting tool.
Fig. 8 shows the instability regions for m ¼ 1 and n ¼ 1. In Fig.8(a), the results obtained by the method of multiple scales and inFig. 8(b) those by the Floquet theory are given. The results in Figs.8(a) and (b) compare well. There are total 6 instability regions, foreach combination of m and n, as given in Table 2. Three majorregions occur close to vn=vn
EC ¼ 2:5 and negligible minor regionscan be found at lower vn=vn
EC. Analysis of the results correspond-ing to higher m or n can yield much smaller and less importantinstability regions omitted in the manuscript. These are similarconclusions to those given in the previous section.
Fig. 9 illustrates the effects of varying rotating speed of thebeam. Similar conclusions, to the last section, can be drawn. That
ARTICLE IN PRESS
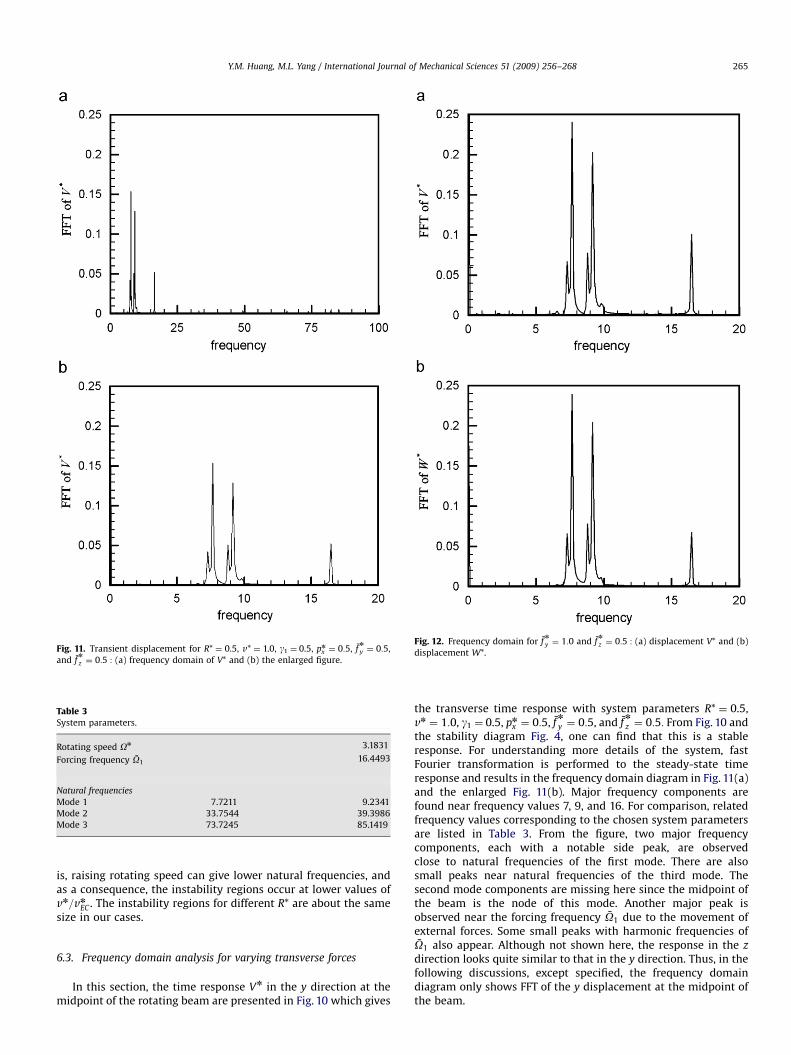
Table 3System parameters.
Rotating speed On 3.1831
Forcing frequency O1 16.4493
Natural frequencies
Mode 1 7.7211 9.2341
Mode 2 33.7544 39.3986
Mode 3 73.7245 85.1419
Fig. 12. Frequency domain for fn
y ¼ 1:0 and fn
z ¼ 0:5 : (a) displacement V* and (b)
displacement W*.Fig. 11. Transient displacement for R* ¼ 0.5, v* ¼ 1.0, g1 ¼ 0.5, pnx ¼ 0:5, f
n
y ¼ 0:5,
and fn
z ¼ 0:5 : (a) frequency domain of V* and (b) the enlarged figure.
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268 265
is, raising rotating speed can give lower natural frequencies, andas a consequence, the instability regions occur at lower values ofvn=vn
EC . The instability regions for different R* are about the samesize in our cases.
6.3. Frequency domain analysis for varying transverse forces
In this section, the time response Vn in the y direction at themidpoint of the rotating beam are presented in Fig. 10 which gives
the transverse time response with system parameters R* ¼ 0.5,vn ¼ 1:0, g1 ¼ 0.5, pn
x ¼ 0:5, fn
y ¼ 0:5, and fn
z ¼ 0:5: From Fig. 10 andthe stability diagram Fig. 4, one can find that this is a stableresponse. For understanding more details of the system, fastFourier transformation is performed to the steady-state timeresponse and results in the frequency domain diagram in Fig. 11(a)and the enlarged Fig. 11(b). Major frequency components arefound near frequency values 7, 9, and 16. For comparison, relatedfrequency values corresponding to the chosen system parametersare listed in Table 3. From the figure, two major frequencycomponents, each with a notable side peak, are observedclose to natural frequencies of the first mode. There are alsosmall peaks near natural frequencies of the third mode. Thesecond mode components are missing here since the midpoint ofthe beam is the node of this mode. Another major peak isobserved near the forcing frequency O1 due to the movement ofexternal forces. Some small peaks with harmonic frequencies ofO1 also appear. Although not shown here, the response in the z
direction looks quite similar to that in the y direction. Thus, in thefollowing discussions, except specified, the frequency domaindiagram only shows FFT of the y displacement at the midpoint ofthe beam.
ARTICLE IN PRESS
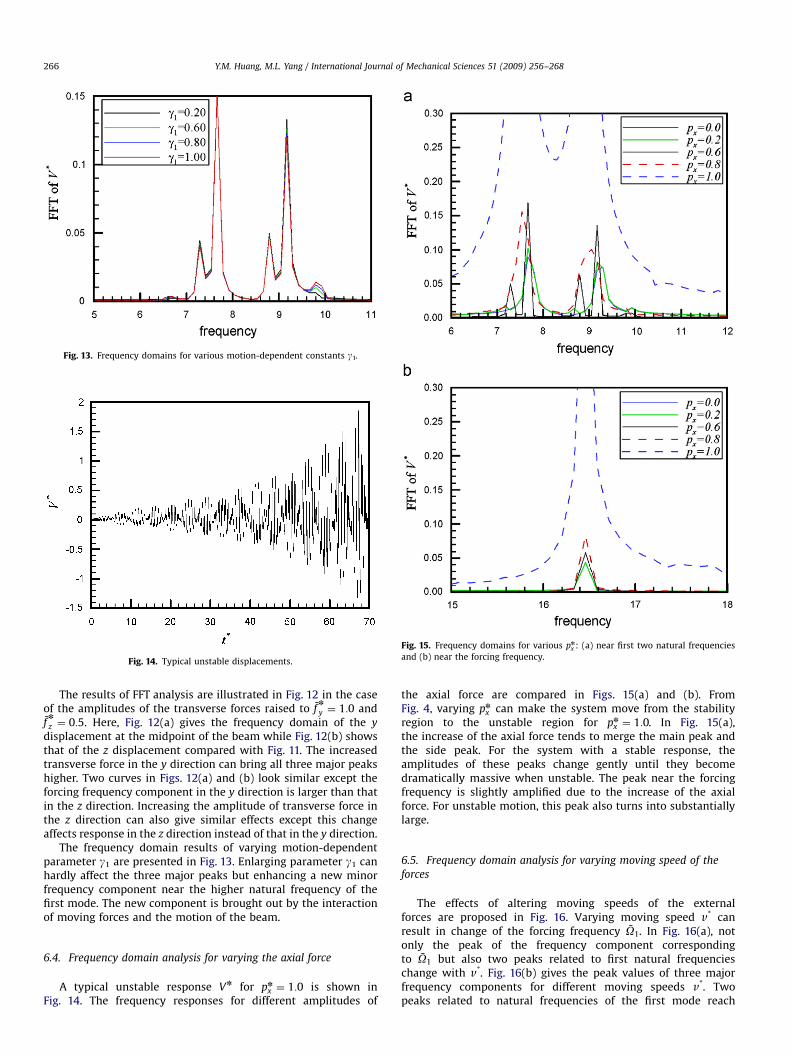
Fig. 15. Frequency domains for various pnx : (a) near first two natural frequencies
and (b) near the forcing frequency.
Fig. 13. Frequency domains for various motion-dependent constants g1.
Fig. 14. Typical unstable displacements.
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268266
The results of FFT analysis are illustrated in Fig. 12 in the caseof the amplitudes of the transverse forces raised to f
n
y ¼ 1:0 andfn
z ¼ 0:5. Here, Fig. 12(a) gives the frequency domain of the y
displacement at the midpoint of the beam while Fig. 12(b) showsthat of the z displacement compared with Fig. 11. The increasedtransverse force in the y direction can bring all three major peakshigher. Two curves in Figs. 12(a) and (b) look similar except theforcing frequency component in the y direction is larger than thatin the z direction. Increasing the amplitude of transverse force inthe z direction can also give similar effects except this changeaffects response in the z direction instead of that in the y direction.
The frequency domain results of varying motion-dependentparameter g1 are presented in Fig. 13. Enlarging parameter g1 canhardly affect the three major peaks but enhancing a new minorfrequency component near the higher natural frequency of thefirst mode. The new component is brought out by the interactionof moving forces and the motion of the beam.
6.4. Frequency domain analysis for varying the axial force
A typical unstable response Vn for pnx ¼ 1:0 is shown in
Fig. 14. The frequency responses for different amplitudes of
the axial force are compared in Figs. 15(a) and (b). FromFig. 4, varying pn
x can make the system move from the stabilityregion to the unstable region for pn
x ¼ 1:0. In Fig. 15(a),the increase of the axial force tends to merge the main peak andthe side peak. For the system with a stable response, theamplitudes of these peaks change gently until they becomedramatically massive when unstable. The peak near the forcingfrequency is slightly amplified due to the increase of the axialforce. For unstable motion, this peak also turns into substantiallylarge.
6.5. Frequency domain analysis for varying moving speed of the
forces
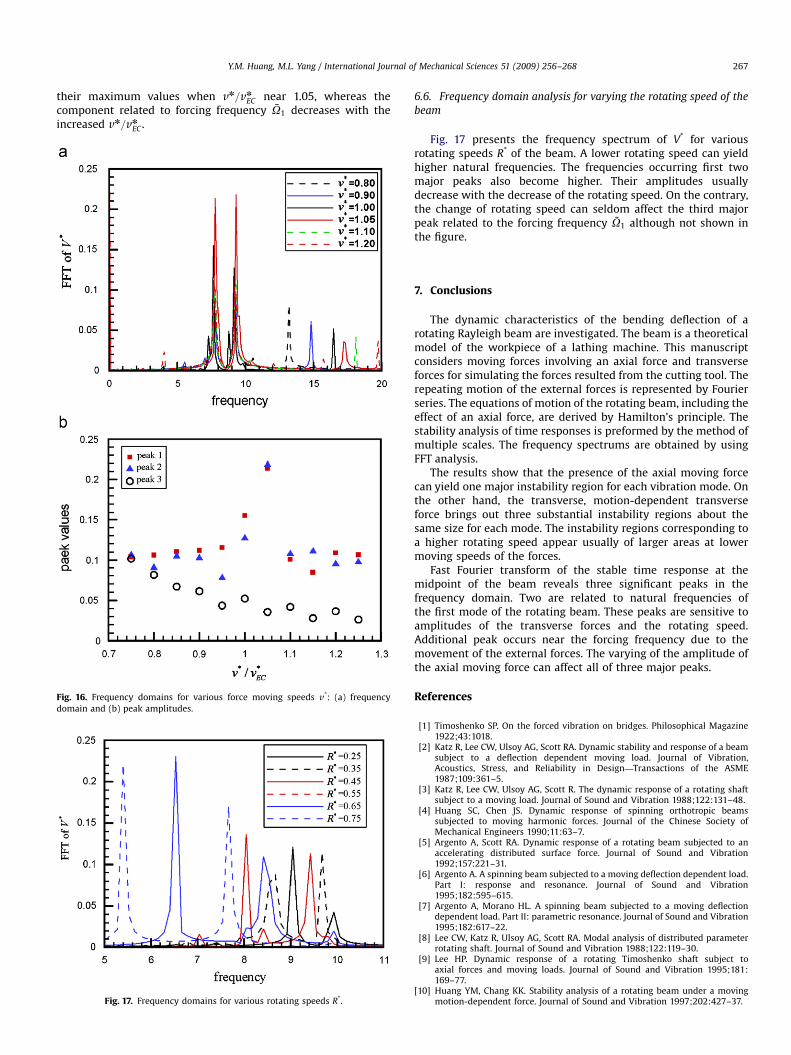
The effects of altering moving speeds of the externalforces are proposed in Fig. 16. Varying moving speed v* canresult in change of the forcing frequency O1. In Fig. 16(a), notonly the peak of the frequency component correspondingto O1 but also two peaks related to first natural frequencieschange with v*. Fig. 16(b) gives the peak values of three majorfrequency components for different moving speeds v*. Twopeaks related to natural frequencies of the first mode reach
ARTICLE IN PRESS
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268 267
their maximum values when vn=vnEC near 1.05, whereas the
component related to forcing frequency O1 decreases with theincreased vn=vn
EC .
Fig. 16. Frequency domains for various force moving speeds v*: (a) frequency
domain and (b) peak amplitudes.
Fig. 17. Frequency domains for various rotating speeds R*.
6.6. Frequency domain analysis for varying the rotating speed of the
beam
Fig. 17 presents the frequency spectrum of V* for variousrotating speeds R* of the beam. A lower rotating speed can yieldhigher natural frequencies. The frequencies occurring first twomajor peaks also become higher. Their amplitudes usuallydecrease with the decrease of the rotating speed. On the contrary,the change of rotating speed can seldom affect the third majorpeak related to the forcing frequency O1 although not shown inthe figure.
7. Conclusions
The dynamic characteristics of the bending deflection of arotating Rayleigh beam are investigated. The beam is a theoreticalmodel of the workpiece of a lathing machine. This manuscriptconsiders moving forces involving an axial force and transverseforces for simulating the forces resulted from the cutting tool. Therepeating motion of the external forces is represented by Fourierseries. The equations of motion of the rotating beam, including theeffect of an axial force, are derived by Hamilton’s principle. Thestability analysis of time responses is preformed by the method ofmultiple scales. The frequency spectrums are obtained by usingFFT analysis.
The results show that the presence of the axial moving forcecan yield one major instability region for each vibration mode. Onthe other hand, the transverse, motion-dependent transverseforce brings out three substantial instability regions about thesame size for each mode. The instability regions corresponding toa higher rotating speed appear usually of larger areas at lowermoving speeds of the forces.
Fast Fourier transform of the stable time response at themidpoint of the beam reveals three significant peaks in thefrequency domain. Two are related to natural frequencies ofthe first mode of the rotating beam. These peaks are sensitive toamplitudes of the transverse forces and the rotating speed.Additional peak occurs near the forcing frequency due to themovement of the external forces. The varying of the amplitude ofthe axial moving force can affect all of three major peaks.
References
[1] Timoshenko SP. On the forced vibration on bridges. Philosophical Magazine1922;43:1018.
[2] Katz R, Lee CW, Ulsoy AG, Scott RA. Dynamic stability and response of a beamsubject to a deflection dependent moving load. Journal of Vibration,Acoustics, Stress, and Reliability in Design—Transactions of the ASME1987;109:361–5.
[3] Katz R, Lee CW, Ulsoy AG, Scott R. The dynamic response of a rotating shaftsubject to a moving load. Journal of Sound and Vibration 1988;122:131–48.
[4] Huang SC, Chen JS. Dynamic response of spinning orthotropic beamssubjected to moving harmonic forces. Journal of the Chinese Society ofMechanical Engineers 1990;11:63–7.
[5] Argento A, Scott RA. Dynamic response of a rotating beam subjected to anaccelerating distributed surface force. Journal of Sound and Vibration1992;157:221–31.
[6] Argento A. A spinning beam subjected to a moving deflection dependent load.Part I: response and resonance. Journal of Sound and Vibration1995;182:595–615.
[7] Argento A, Morano HL. A spinning beam subjected to a moving deflectiondependent load. Part II: parametric resonance. Journal of Sound and Vibration1995;182:617–22.
[8] Lee CW, Katz R, Ulsoy AG, Scott RA. Modal analysis of distributed parameterrotating shaft. Journal of Sound and Vibration 1988;122:119–30.
[9] Lee HP. Dynamic response of a rotating Timoshenko shaft subject toaxial forces and moving loads. Journal of Sound and Vibration 1995;181:169–77.
[10] Huang YM, Chang KK. Stability analysis of a rotating beam under a movingmotion-dependent force. Journal of Sound and Vibration 1997;202:427–37.

ARTICLE IN PRESS
Y.M. Huang, M.L. Yang / International Journal of Mechanical Sciences 51 (2009) 256–268268
[11] Huang YM, Lee CY. Dynamics of a rotating Rayleigh beam subject to arepetitively traveling force. International Journal of Mechanical Sciences1998;40:779–92.
[12] Fan CC. Coupling dynamic effects of the workpiece and the cutting tool in thelathing process. Master thesis, National Central University, Taiwan, ROC, 1999.
[13] Katz R. The dynamic response of a rotating shaft subject to an axially movingand rotating load. Journal of Sound and Vibration 2001;246:757–75.
[14] Cheng CC, Lin JK. Modeling a rotating shaft subjected to a high-speed movingforce. Journal of Sound and Vibration 2003;261:955–65.
[15] El-Saeidy FMA. Finite element modeling of rotor-shaft-rolling bearingsystems with consideration of bearing nonlinearities. Journal of Vibrationand Control 1998;4:541–602.
[16] El-Saeidy FMA. Finite-element dynamic analysis of a rotating shaft with orwithout nonlinear boundary conditions subject to a moving load. NonlinearDynamics 2000;21:377–408.
[17] Ouyang H, Wang M. A dynamic model for a rotating beam subjected to axiallymoving forces. Journal of Sound and Vibration 2007;308:674–82.
[18] Ouyang H, Wang M. Dynamics of a rotating shaft subject to a three-directional moving load. ASME Journal of Vibration and Acoustics—Transac-tions of the ASME 2007;129:386–9.
[19] Yang ML. Dynamics of a rotating beam subjected to reciprocating axial andtransverse forces for simulating a lathing process. Master thesis, NationalCentral University, Taiwan, ROC, 2005.
[20] Nayfeh AH, Mook DT. Nonlinear oscillations. New York: Wiley; 1979.
Copyright © 2022 FDOKUMEN