Derivative free filtering in hydraulic systems for fault identification
9
Derivative free filtering in hydraulic systems for fault identification $ Vishal Mahulkar a, , Douglas E. Adams a , Mark Derriso b a 1500 Kepner Drive, Lafayette IN 47905, USA b USAF Air Vehicles Directorate, Air Force Research Laboratory, Dayton OH, USA article info Article history: Received 25 March 2010 Accepted 8 January 2011 Available online 6 May 2011 Keywords: Divided difference filtering Hydraulic system Fault identification Estimation System identification Leakage abstract Diagnosis of incipient faults in hydraulic systems is of prime importance due to the performance and reliability demands. This paper outlines the application of derivative free filtering in hydraulic systems for the purpose of real-time fault identification. A flexible experimental setup is constructed in order to simulate different types of faults. The method in this paper deals with internal leakage faults. A detailed non-linear model of the hydraulic actuator experimental setup is developed and validated. Robust control strategies typically hide the presence of faults during incipient stages, making identification of the fault difficult. A partial feedback linearization based robust position control strategy is also presented and faults are identified in the presence of robust control. Faults in the hydraulic systems are modeled as parametric faults and second order divided difference filtering (DDF) is used to estimate the states and the parameters. The efficacy of this estimation algorithm is demonstrated using different fault levels as well as different fault growth profiles. The accuracy and the reliability of the methodology are also demonstrated by identifying faults as small as .01 l/s. & 2011 Published by Elsevier Ltd. 1. Introduction Hydraulic systems are popular in the industrial fields due to the size to power ratio of hydraulics and the ability to exhibit fast response times in the application of large forces and torques (Jelali & Kroll, 2004). Their industrial application include positioning (Shih & Sheu, 1991; Sohl & Bobrow, 1999; Tafazoli, de Silva, & Lawrence, 1998), active suspensions (Alleyne & Hedrick, 1995; Alleyne & Liu, 2000; Lin & Kanellakopoulos, 1995), material testing, aircraft, and industrial hydraulic systems. These applications place high impor- tance on reliability and safety of hydraulic systems, which when compounded with the arduous work conditions, necessitates devel- opment of reliable and efficient fault identification techniques. Fault diagnosis of electro-hydraulic systems is a very challen- ging task due to the presence of highly non-linear dynamic behaviors such as dead-band and hysteresis of control valves, non-linear pressure-flow relations, and variation of fluid volumes due to the movement of the actuator (Merritt, 1967). It is also difficult to model any system accurately resulting in parametric uncertainties and uncertain non-linearities, which are observed by the control algorithm as well as the fault identification algorithm. Other disturbances such as external forces, friction, etc. cannot be modeled. The fault identification algorithm thus needs to be robust to these uncertainties and disturbances. A variety of methods have been proposed in the literature for early detection of faults in dynamical systems. These methods are broadly divided into two main types: hardware redundancy based and analytical redundancy based methods (Watton, 1992). Analy- tical redundancy based methods are further divided into signal model based methods and process model based methods (Isermann, 2006; Patton, Frank, & Clark, 2000). An excellent review of fault detection and diagnosis methods is available in several survey papers (Dash & Venkatasubhamanian, 2000; Isermann, 1993; Patton, 1991, 1997). The most important of the analytical redun- dancy based approaches fall under parity space techniques, para- meter estimation techniques, statistical techniques, and observer based techniques (Hammouri, Kabore, Othman, & Biston, 2002). Model based techniques have received much attention in the last few decades Isermann (2005). A number of observer-based techni- ques have been proposed for linear systems, for example, eigen- structure assignment (Patton & Chen, 1992, 1997), unknown input observer (Kudva, Vishwanadham, & Ramakrishna, 1980; Patton, Clark, & Frank, 1989; Patton et al., 2000), etc., and for non-linear systems, for example, robust observer based methods (Hammouri et al., 2002; Preston, Shields, & Daley, 1996). A drawback of observer- based methods in isolating faults is that they utilize the different directions of the different faults in the state space of the model, and, as a result, these methods are not capable of isolating faults that have the same direction in the system state space (Yu, 1997). Parameter estimation techniques (Isermann, 1984), on the other hand, can detect and isolate faults, and may diagnose fault size, even for faults Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/conengprac Control Engineering Practice 0967-0661/$ - see front matter & 2011 Published by Elsevier Ltd. doi:10.1016/j.conengprac.2011.01.003 $ (DISTRIBUTION A. Approved for public release; distribution unlimited) WPAFB case number (88ABW-2010-1259). Corresponding author. Tel.: + 1 765 586 2044. E-mail addresses: [email protected], [email protected] (V. Mahulkar), [email protected] (D.E. Adams), [email protected] (M. Derriso). Control Engineering Practice 19 (2011) 649–657
Transcript of Derivative free filtering in hydraulic systems for fault identification

Control Engineering Practice 19 (2011) 649–657
Contents lists available at ScienceDirect
Control Engineering Practice
0967-06
doi:10.1
$(DIS
case nu� Corr
E-m
vishal.m
mark.de
journal homepage: www.elsevier.com/locate/conengprac
Derivative free filtering in hydraulic systems for fault identification$
Vishal Mahulkar a,�, Douglas E. Adams a, Mark Derriso b
a 1500 Kepner Drive, Lafayette IN 47905, USAb USAF Air Vehicles Directorate, Air Force Research Laboratory, Dayton OH, USA
a r t i c l e i n f o
Article history:
Received 25 March 2010
Accepted 8 January 2011Available online 6 May 2011
Keywords:
Divided difference filtering
Hydraulic system
Fault identification
Estimation
System identification
Leakage
61/$ - see front matter & 2011 Published by
016/j.conengprac.2011.01.003
TRIBUTION A. Approved for public release; di
mber (88ABW-2010-1259).
esponding author. Tel.: +1 765 586 2044.
ail addresses: [email protected],
[email protected] (V. Mahulkar), deadams
[email protected] (M. Derriso).
a b s t r a c t
Diagnosis of incipient faults in hydraulic systems is of prime importance due to the performance and
reliability demands. This paper outlines the application of derivative free filtering in hydraulic systems
for the purpose of real-time fault identification. A flexible experimental setup is constructed in order to
simulate different types of faults. The method in this paper deals with internal leakage faults. A detailed
non-linear model of the hydraulic actuator experimental setup is developed and validated. Robust
control strategies typically hide the presence of faults during incipient stages, making identification of
the fault difficult. A partial feedback linearization based robust position control strategy is also
presented and faults are identified in the presence of robust control. Faults in the hydraulic systems are
modeled as parametric faults and second order divided difference filtering (DDF) is used to estimate the
states and the parameters. The efficacy of this estimation algorithm is demonstrated using different
fault levels as well as different fault growth profiles. The accuracy and the reliability of the
methodology are also demonstrated by identifying faults as small as .01 l/s.
& 2011 Published by Elsevier Ltd.
1. Introduction
Hydraulic systems are popular in the industrial fields due to thesize to power ratio of hydraulics and the ability to exhibit fastresponse times in the application of large forces and torques (Jelali &Kroll, 2004). Their industrial application include positioning (Shih &Sheu, 1991; Sohl & Bobrow, 1999; Tafazoli, de Silva, & Lawrence,1998), active suspensions (Alleyne & Hedrick, 1995; Alleyne & Liu,2000; Lin & Kanellakopoulos, 1995), material testing, aircraft, andindustrial hydraulic systems. These applications place high impor-tance on reliability and safety of hydraulic systems, which whencompounded with the arduous work conditions, necessitates devel-opment of reliable and efficient fault identification techniques.
Fault diagnosis of electro-hydraulic systems is a very challen-ging task due to the presence of highly non-linear dynamicbehaviors such as dead-band and hysteresis of control valves,non-linear pressure-flow relations, and variation of fluid volumesdue to the movement of the actuator (Merritt, 1967). It is alsodifficult to model any system accurately resulting in parametricuncertainties and uncertain non-linearities, which are observedby the control algorithm as well as the fault identificationalgorithm. Other disturbances such as external forces, friction,
Elsevier Ltd.
stribution unlimited) WPAFB
@purdue.edu (D.E. Adams),
etc. cannot be modeled. The fault identification algorithm thusneeds to be robust to these uncertainties and disturbances.
A variety of methods have been proposed in the literature forearly detection of faults in dynamical systems. These methods arebroadly divided into two main types: hardware redundancy basedand analytical redundancy based methods (Watton, 1992). Analy-tical redundancy based methods are further divided into signalmodel based methods and process model based methods (Isermann,2006; Patton, Frank, & Clark, 2000). An excellent review of faultdetection and diagnosis methods is available in several surveypapers (Dash & Venkatasubhamanian, 2000; Isermann, 1993;Patton, 1991, 1997). The most important of the analytical redun-dancy based approaches fall under parity space techniques, para-meter estimation techniques, statistical techniques, and observerbased techniques (Hammouri, Kabore, Othman, & Biston, 2002).
Model based techniques have received much attention in the lastfew decades Isermann (2005). A number of observer-based techni-ques have been proposed for linear systems, for example, eigen-structure assignment (Patton & Chen, 1992, 1997), unknown inputobserver (Kudva, Vishwanadham, & Ramakrishna, 1980; Patton,Clark, & Frank, 1989; Patton et al., 2000), etc., and for non-linearsystems, for example, robust observer based methods (Hammouriet al., 2002; Preston, Shields, & Daley, 1996). A drawback of observer-based methods in isolating faults is that they utilize the differentdirections of the different faults in the state space of the model, and,as a result, these methods are not capable of isolating faults that havethe same direction in the system state space (Yu, 1997). Parameterestimation techniques (Isermann, 1984), on the other hand, candetect and isolate faults, and may diagnose fault size, even for faults

V. Mahulkar et al. / Control Engineering Practice 19 (2011) 649–657650
having the same direction in the state space of the model. Applica-tion of parameter estimation techniques to linearized models havebeen discussed in the literature (Yu, 1997). Extended Kalman Filters(EKF) (An & Sepehri, 2003) and adaptive observers (Cho & Rajamani,1997; Garimella & Yao, 2005; Rajamani & Hedrick, 1995) have alsofound application in hydraulic fault detection.
In this paper, faults are modeled as parametric faults andadvances in derivative free filtering (Norgaard, Poulsen, & Ravn,2000) are used to estimate the unknown parameters. The initialfault considered is a leakage fault, which is a general symptom ofworn hydraulic components. In most cases, leakage increasesprogressively over a long period of time causing the systemdynamics to also change. Based on the location, the leakage canbe classified into: (i) internal (crossport) leakage, where the fluidleaks to another part of the circuit within the hydraulic system, forexample, from one chamber of the hydraulic actuator to the otherand (ii) external leakage where the fluid leaks out of the hydrauliccircuit. Whereas external leakage can be found through visualinspection, internal leakage caused by seal damage cannot bedetected easily until the actuator seal is severely damaged result-ing in degraded performance. Thus, it is important to identify thisfault as part of any health monitoring strategy. The paper isorganized as follows. The details of the experimental setup capableof simulating different types of faults including leakage faults arepresented in Section 2. The dynamic model of the hydraulicactuator system used in the fault identification process is pre-sented in Section 3. A brief overview of the parameter estimationmethod is presented in Section 4. Experimental results are dis-cussed in Section 5 and the conclusions are discussed in Section 7.
2. Experimental Setup
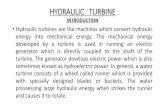
The picture of the experimental setup is shown in Fig. 1(a). Thesetup consists of two parts. The actuator loop, which simulates theactual hydraulic actuator, and the load loop, which is used tointroduce user-defined loading on the actuator. Fig. 1(b) shows thecircuit diagram of the experimental setup. The part left of the ‘‘Loadcell’’ is the main actuator loop and the part to the right is the load
Fig. 1. Experimental setup. (a) Act
loop. The complete hydraulic system is powered using a pressurecompensated pump (label 1) operating at 6.89 MPa (1000 psi). Thepressure compensation is required to maintain the pressure con-stant in pressure of different supply flow rates or load on thesystem. The pressure in the actuator (label 4) is controlled using aParker D1FH directional proportional valve (label 5). The positionof the actuator piston is measured using an analog position sensor(label 8). The pressures in the two chambers of the cylinder and thevalve spool position can also be measured. Flowmeters (label f1–f4) are added to the circuit to measure the flow rates in the internaland external leakage loops. The load cylinder is controlled with aParker D1FX directional proportional valve (label 9). The load loopalso has safety features such as pressure reducing valve (label 11)and pressure relief valves (label 10). Pressures in the load loop canalso be measured to allow implementation force control loop.
A dSPACE embedded system is used to acquire data and runcontrollers and the fault identification algorithm in real time. Theactuator loop has the ability to simulate different kinds of faultssuch as internal leakage faults using proportional valve (label 6),external leakage faults using needle valves (label 7), supply flowrate and pressure faults at the pump (label 1), etc. The internalleakage fault is simulated by connecting the two chambers of thecylinder externally using a Parker D1FH directional proportionalvalve. This valve can be controlled electronically and is used tosimulate the actual wear process of the internal seal.
Physics based models of such a setup are well documented inthe literature, so the focus in this paper is utilizing these modelsfor system identification and control. The next section gives anoverview of the dynamic model and the robust controllers usedfor position control.
3. Problem formulation and dynamic model
The non-linear equations of motion of a double rod hydraulicactuator are given as (Merritt, 1967)
m €xL ¼ PLA�b _xL�Ffcþ~f ð1Þ
ual setup. (b) Circuit diagram.

1 2 3 4 5 6 7 81.4
1.41
1.42
1.43
1.44
1.45
1.46
1.47
1.48
1.49
x 10−8
Cdw √
(uni
ts)
Run
�
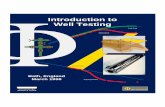
Fig. 2. Identification of flow coefficient.
1 2 3 4 5 6 7 80.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5x 10−12
Vt
4�e
(uni
ts)
Run
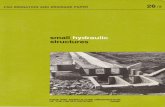
Fig. 3. Identification of bulk modulus.
−0.5 0 0.5−1000
−800
−600
−400
−200
0
200
400
600
800
1000
Velocity m/s
Forc
e N
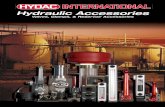
Fig. 4. Identification of cylinder friction.
V. Mahulkar et al. / Control Engineering Practice 19 (2011) 649–657 651
Vt
4be
_PL ¼�A _xL�Ctm
ffiffiffiffiffiffiffiffijPLj
psgn PLþQL ð2Þ
tv _xv ¼�xvþkvi ð3Þ
where xL is the displacement of the piston, PL¼P1�P2 is the loadpressure of the cylinder, A is the ram area of the cylinder, Ffc
represents the modeled Coulomb friction force, ~f represents theexternal disturbances such as unmodeled friction forces, and Ctm
represents the coefficient of the total internal leakage of thecylinder. The spool dynamics are modeled using a simplified firstorder equation. xv is the displacement of the spool of thedirectional proportional valve. QL is the load flow and is relatedto the spool displacement as follows (Merritt, 1967):
QL ¼ Cdwxv
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiPs�sgnðxvÞPL
r
sð4Þ
A new set of parameters are defined as follows:
PL ¼PL
Sc3
, xv ¼xv
Sc4
, b ¼b
ASc3
K v ¼kv
Sc4
, y1 ¼ASc3
m, C tm ¼
ffiffiffiffiffiffiSc3
pSc4
ffiffiffiffirpCdw
Ctm
y2 ¼ dn, y3 ¼4be
Vt
Sc4ffiffiffiffirp CdwffiffiffiffiffiffiSc3
p , A ¼1
Sc4
ffiffiffiffiffiffiSc3
p ffiffiffiffirpCdw
A ð5Þ
where Sc3and Sc4
are scaling constants used to achieve moreaccurate numerical results. The system dynamic equations canthen be written as
_x1 ¼ x2
_x2 ¼ y1ðx3�bx2�F fcÞþy2þ~d
_x3 ¼ y3ð�Ax2�C tm
ffiffiffiffiffiffiffiffijx3j
px3þg3x4Þ
_x4 ¼�1
tvxvþ
kv
tvu ð6Þ
where ðx1 x2 x3 x4Þ ¼ ðxL _xL PL xvÞ, and g3 is a suitably definedfunction.
3.1. System identification
The parameters of the system were determined by using anopen loop pseudo-random binary signal followed by least-squaresestimation. For example, the parameters Vt=4be and Cdw=r wereidentified using about 30 independent runs and the median wasused in the calculations. Figs. 2 and 3 show the parameterestimation results of eight different runs. The cylinder frictionwas also identified as shown in Fig. 4. The friction characteristicclearly shows the effects of Stribeck, Coulomb, and viscouscomponents typically used to model friction. The values used inthe simulation and control development are
Vt
4be
¼ 1:14� 10�12 m3
Pað7Þ
and
Cdwffiffiffiffirp ¼ 1:47� 10�8 m2
sffiffiffiffiffiffiPap ð8Þ
3.2. Position control
The robust position control strategy is based on feedbacklinearizing control of the pressure dynamics equation (2). Thedesired force trajectory is calculated based on the desired position

15 20 25−0.06
−0.05
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
Time (s)
Pis
ton
posi
tion
(m)
ReferenceExperimentalSimulated
Fig. 5. Trajectory following for simulated model and experimental setup.
15 20 25−2
−1
0
1
2x 10−3
Time (s)
Err
or (m
)
Simulated
15 20 25−2
−1
0
1
2x 10−3
Time (s)
Err
or (m
)
Experimental
Fig. 6. Trajectory following errors.
−1
0
1
2
3
4
5
Inpu
ts
SimulatedExperimental
V. Mahulkar et al. / Control Engineering Practice 19 (2011) 649–657652
trajectory. The spool dynamics are almost 10 times faster than thehydraulic actuator dynamics and, hence, the spool dynamics canbe neglected and xv ¼ K vu for position control purposes. Byneglecting the internal leakage dynamics, the force dynamicsequation can be derived as follows:
F ¼ PLA ð9Þ
) _F ¼ _PLA ð10Þ
¼4be
VtAð�A _xLþQLÞ ð11Þ
¼4be
VtA �A _xLþCdwxv
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiPs�sgnðxvÞPL
r
s !ð12Þ
Define
B¼ 4be
VtACdw
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiPs�sgnðxvÞPL
r
sð13Þ
and let Fd be the desired force trajectory to be achieved. Thefollowing control input is then considered:
xv ¼1
B4beA2 _xL
Vtþ _F d�kf ðF�FdÞ
� �ð14Þ
A Lyapunov type function is also defined as
V ¼ 12klðF�FdÞ
2ð15Þ
and then differentiated,
_V ¼ klð_F� _F dÞðF�FdÞ ð16Þ
_V ¼ kl4beA2 _xL
VtþBxv�dotFd
� �ðF�FdÞ ð17Þ
_V ¼�klkf ðF�FdÞ2
ð18Þ
producing a negative semi-definite function. Using Barbalatt’sLemma, it can show that the error F�Fd goes to zero exponen-tially. The desired force trajectory is chosen as follows:
Fd ¼m €xd�kvð _xL� _xdÞ�kpðxL�xdÞþ f ð19Þ
where xd is the desired position trajectory and f is the estimate offrictional forces on the cylinder. Using this trajectory, it can beshown that the position error is upper bounded by er 1
2
� �jdj at
steady state, where d¼ f�~f .
3.3. Model validation and verification
To validate the developed model, the designed control strategywas implemented on the model and the experimental setup. Thecontrol parameters that were used are given in Table 1. The kf
parameter used in the experiments is smaller because thatparameter defines the time constant of the error signal. Largerkf results in a smaller time constant requiring larger systembandwidth for chatter free operation. This choice of kf leads tochatter free operation in the experimental response characteris-tics. Figs. 5–7 show the comparison of the experimental andsimulated results for a randomly generated input signal. From the
Table 1Control parameters.
Simulation Experiments
kv 1�102 1�102
kp 1�106 1�106
kf 80 30
15 20 25−4
−3
−2
Time (s)
Fig. 7. Input voltage comparison.

V. Mahulkar et al. / Control Engineering Practice 19 (2011) 649–657 653
error plots (Fig. 6) and the input comparisons (Fig. 7), it isconcluded that the model that has been developed is sufficientlyaccurate and the model and control strategy are assumed to beverified.
4. Fault identification
In this section, a brief introduction of divided differencefiltering is given and then this method is modified to identifythe actuator states and parameters.
4.1. Divided difference filtering
Although the Kalman Filter (KF) has been used to solve theproblem of optimal state filtering in linear models with Gaussiannoise, there is no such solution available for non-linear systems.Instead, a number of estimators may be found in the literaturethat are basically extensions of the KF based on approximations ofthe non-linear system equations. The most prominent and widelyused method among these is the Extended Kalman Filter (EKF)(Boutayeb & Aubry, 1999; Gunther, Yaz, & Unbehauen, 1999;Ljung, 1979), which is obtained by first order linearization of thesystem equations so that the traditional KF can be applied at eachstep. Extensive use of the EKF over the past few decades hasshown that, in several important practical problems, the firstorder approximation provides insufficient accuracy, resulting insignificant bias or even convergence problems (Simon, 2006).Moreover, the derivation of the Jacobian matrix, which is neces-sary for the first order approximation, is non-trivial in manyapplications.
Recently, efficient derivative free filtering techniques, whichdo not require evaluation of the Jacobian matrix, have beenproposed. These filters have a computational complexity similarto the EKF but are much simpler to implement. Schei (1997) usesa first order approximation of a non-linear transformation thatimplements divided differences for the propagation of the meanand covariance of the state distribution. Quine (2006) uses aminimal ensemble set of state vectors to propagate the first twomoments of the state distribution to obtain a filter that is shownto be equivalent to the EKF in a limiting case. More accuratefilters, which are called Sigma Point Kalman Filters (SPKFs) (vander Merwe, Julier, Bogdanov, Harvey, & Hunt, 2004), have alsobeen proposed that use second or higher order approximations ofthe non-linear transformation. This class of filters include theUnscented Kalman Filter (UKF), which is based on the unscentedtransform, a technique for propagating the mean and covarianceof a distribution through a non-linear transformation (Julier &Uhlmann, 2004), and the divided difference filter (DDF), which isbased on a second order approximation using Stirling’s interpola-tion formula (Norgaard et al., 2000).
This section gives a brief summary of the DDF. The reader isreferred to Norgaard et al. (2000) for a detailed description andanalysis of the DDF. The class of systems for which this procedureis applicable is given below:
xðkþ1Þ ¼ fmðxðkÞ,uðkÞÞþvðkÞ ð20Þ
yðkÞ ¼HxðkÞþwðkÞ ð21Þ
where xðkÞARn is the state vector, yðkÞARp is the output vector,uðkÞARm is the input vector and fmðxðkÞ,uðkÞÞ is the non-linearplant model. It is assumed that fm is either a globally Lipschitzcontinuous function or that it is locally Lipschitz continuous withxðkÞ restricted to a compact domain DARn. vðkÞ and wðkÞ areassumed to be independent, identically distributed Gaussian
random variables with vðkÞ �N ð0,Q ðkÞÞ and wðkÞ �N ð0,RðkÞÞcalled the process and measurement noise, respectively.
The DDF filter provides an estimate of the evolution of aGaussian distribution through a non-linear transformation bymaking use of Stirling’s formula to obtain a second order approx-imation of the non-linear system around the current stateestimate. Stirling’s formula may be derived from the multi-dimensional Taylor’s series expansion by replacing the derivativeswith divided differences. The equations for computing the secondorder approximation along with those for propagating a multi-dimensional Gaussian random variable x with mean x throughthe approximated function, fsðx,xÞ, using special vectors, whichare columns of the matrix square root of the covariance of x, aregiven in the literature (Norgaard et al., 2000). Based on thisformulation, the DDF filter equations for the system in (20) can besummarized as in (26)–(32).
The filter equations have been suitably simplified based on themodel structure with a linear output equation and the assump-tion of additive Gaussian noise. In the following equations, all thequantities with a ‘‘bar’’ denote a priori estimates (before theactual output is observed) while the quantities with a ‘‘hat’’denote a posteriori estimates (after the output is observed).Further, let SxðkÞ, SxðkÞ, SvðkÞ, and SwðkÞ denote the matrix squareroots of PðkÞ (the a priori state covariance estimate), PðkÞ (the a
posteriori state covariance estimate), Q ðkÞ (the process noisecovariance) and RðkÞ (the output noise covariance), respectively.These matrices are calculated using the following equations:
PðkÞ ¼ SxðkÞSxðkÞT
ð22Þ
PðkÞ ¼ SxðkÞSxðkÞT
ð23Þ
Q ðkÞ ¼ SvðkÞSvðkÞT
ð24Þ
and
RðkÞ ¼ SwðkÞSwðkÞT
ð25Þ
Let xðkÞ denote the a priori state estimate and let sx,p denote thepth column of Sx. Then, the a priori state estimate calculated bythe DDF is given by
xðkþ1Þ ¼h2�n
h2fmðxðkÞ,uðkÞÞ
þ1
2h2
Xn
p ¼ 1
ffmðxðkÞþhsx,p,uðkÞÞþ fmðxðkÞ�hsx,p,uðkÞÞg ð26Þ
Two temporary matrices are defined, Sð1ÞxxðkÞ and Sð2Þ
xxðkÞ, whose pth
columns are computed as
Sð1ÞxxðkÞðpÞ ¼
1
2hffmðxðkÞþhsx,p,uðkÞÞ�fmðxðkÞ�hsx,p,uðkÞÞg ð27Þ
Sð2ÞxxðkÞðpÞ ¼
ffiffiffiffiffiffiffiffiffiffiffiffih2�1p
2h2ffmðxðkÞþhsx,p,uðkÞÞ
þ fmðxðkÞ�hsx,p,uðkÞÞ�2fmðxðkÞ,uðkÞÞg ð28Þ
Then the updated square root of the a priori state covariancematrix, Sxðkþ1Þ, is given by
Sxðkþ1Þ ¼HTðSð1ÞxxðkÞ Sð2Þ
xxðkÞ SwðkÞÞ ð29Þ
where HTðSÞ denotes a Householder transformation (Golub &Loan, 1996) to convert the matrix S into a square triangular formsuch that HTðSÞHTðSÞT ¼ SST . The gain matrix, Kðkþ1Þ, is calcu-lated using (30), and the square root of the a posteriori state

V. Mahulkar et al. / Control Engineering Practice 19 (2011) 649–657654
covariance matrix, Sxðkþ1Þ, is given by (31):
Kðkþ1Þ ¼ Sxðkþ1ÞSxðkþ1ÞT HTðHSxðkþ1ÞSxðkþ1ÞT HT
þRðkþ1ÞÞ�1
ð30Þ
Sxðkþ1Þ ¼HTð½ðI�Kðkþ1ÞHÞSðkþ1Þ Svðkþ1Þ�Þ ð31Þ
The innovation (output prediction error) is defined as gðkþ1Þ ¼yðkþ1Þ�Hxðkþ1Þ and xðkþ1Þ is used to denote the a posteriori
estimate after the kth observation. The state estimate is thenupdated using (32) to get the final a posteriori estimate
xðkþ1Þ ¼ xðkþ1Þ�Kðkþ1Þgðkþ1Þ ð32Þ
0 20 40 60 80 100 120 140 160 1800.075
0.08
0.085
0.09
0.095
0.1
0.105
Time (s)
Pos
ition
(m)
ReferenceResponse
Fig. 8. Square wave reference tracking.
4.2. Fault modeling
The fault in the hydraulic system under consideration ismodeled as a parametric fault (2), This unknown parameter isthen appended to the state space representation of the system.The DDF non-linear filter is then used to estimate this state and,hence, the fault parameter. The internal leakage is given as
Qleak ¼ Ctm
ffiffiffiffiffiPL
psgn PL ð33Þ
where
Ctmpxvleakð34Þ
or
Ctm ¼ kqxvleakð35Þ
This fault parameter is appended to the system (6) and convertedto discrete form using simple Euler difference as follows:
x1ðkþ1Þ ¼ x1ðkÞþTsx2ðkÞ ð36Þ
x2ðkþ1Þ ¼ x2ðkÞþTsy1ðx3ðkÞ�bx2ðkÞ�F fcÞþy2þx6ðkÞ ð37Þ
x3ðkþ1Þ ¼ x3ðkÞþTsy3ð�Ax2ðkÞ�x5ðkÞffiffiffiffiffiffiffiffiffiffiffix3ðkÞ
psgnðx3ðkÞÞ
þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiPs�sgnðx4ðkÞÞx3ðkÞ
qx4ðkÞÞ ð38Þ
x4ðkþ1Þ ¼ x4ðkÞþTs�1
tvx4ðkÞ
� �þ
Kv
tvu ð39Þ
x5ðkþ1Þ ¼ x5ðkÞ ð40Þ
x6ðkþ1Þ ¼ x6ðkÞ ð41Þ
where x1,y,x4 are states (position, velocity, load pressure andspool position), x5 is the parameter appended as a state forunknown internal leakage fault and x6 is the appended state forestimating friction. It is important to estimate friction onlinebecause of the large uncertainty associated with offline frictionestimation. The addition of the friction parameter improves theestimation accuracy significantly.
To use the divided difference filter, the system model, fm, canbe easily inferred from (36)–(41). yðkÞ is the measured output ofthe system. In this case, the first four states are being measured.Hence,
H¼
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
26664
37775 ð42Þ
vðkÞ �N ð0,Q ðkÞÞ is the Gaussian process noise, with Q ðkÞ beingthe process covariance. The process covariance is estimated basedon the confidence of the system model (36)–(41). For example, for
this application the covariance is assumed to be a constant:
Q ¼ diagð½1� 10�2,1� 10�2,1,1� 10�2,8� 10�6,1�Þ ð43Þ
Eqs. (40) and (41) represent the dynamics of the internal leakagefault parameter and friction parameter, respectively. Since thefault parameter is a slow varying quantity, its process covarianceis very low (6� 10�6), whereas for the friction parameter, whichcan vary suddenly, the process noise covariance is assumed to be 1.
wðkÞ �N ð0,RðkÞÞ represents the Gaussian measurement with Rrepresenting the noise covariance. The measurement noise covar-iance is estimated from experimental data. In the current applica-tion, it is assumed to be constant:
R¼ diagð½1� 10�6 1� 10�2 1� 107 1� 10�2�Þ ð44Þ
The initial variance estimate for the state estimates is assumed to be
P¼ diagð1� 102� ½1 1 1 1 1 1�Þ ð45Þ
5. Experimental result
To ensure the presence of persistent excitation condition duringthe execution of estimation algorithm, all of the estimations wereperformed while the actuator was tracking a square wave refer-ence signal. The reference and response is shown in Fig. 8. Fig. 9shows the results of the fault identification method with stepchanges in the leakage valve commanded input voltage. A stepchange helps understand the response of the filtering algorithmwhen there is a sudden failure in the system. Fig. 9(a) shows theestimated leakage coefficient, C tm, as described in Eq. (5) as well asthe input voltage to the valve controlling the internal leakage. They-axis on the left is for the flow coefficient and the y-axis on theright is for the input voltage. The two axes are scaled differently toallow comparison of the response. As can be seen the estimatedflow coefficient tracks the changes in the input voltages very well.Actual leakage flow rate can then be calculated from the estimatedflow coefficient. This is depicted in Fig. 9(b) along with themeasured flow rate from the flow meters. The agreement betweenthe estimated and the measured flow is very good. The measuredflow rate shows periodic spikes because the flow meters onlymeasure the magnitude of the flow rate. Whenever the pistonchanges direction, the flow rate also changes direction so momen-tarily the flow rate is zero, resulting in spikes. These physicaldynamics are also estimated very well by the filtering algorithm.Furthermore, when the piston stops moving, the pressures in the

0 50 100 150 200 250
0
1
2
Time (s)
Est
imat
ed le
akag
e co
effc
ient
Ctm¯
0
5
Leak
age
valv
e co
mm
ande
d (v
olts
)
0 50 100 150 200 2500
0.005
0.01
0.015
0.02
0.025
0.03
0.035
Time (s)
Leak
age
rate
(ltrs
/s)
EstimatedMeasured
Fig. 9. Estimation of leakage coefficient and leakage rate for step changes in leakage control valve input. (a) Estimation of leakage coefficient C tm. (b) Comparison of
estimated and measured leakage.
0 50 100 150 200 250
0
1
2
Time (s)
Est
imat
ed le
akag
e co
effic
ient
0
5Le
akag
e va
lve
com
man
ded
(vol
ts)
0 50 100 150 200 2500
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
Time (s)
Leak
age
rate
EstimatedMeasured
Fig. 10. Estimation of leakage coefficient and leakage rate for a slow ramp leakage control valve input. (a) Estimation of leakage coefficient C tm . (b) Comparison of
estimated and measured leakage.
V. Mahulkar et al. / Control Engineering Practice 19 (2011) 649–657 655
two chambers of the cylinder start to equalize resulting indecreasing flow rate. This phenomenon is also estimated well bythe algorithm as seen in Fig. 9(b).
The second example considered is for a slow ramp increase in theinput voltage to the valve controlling the internal leakage. Thisexample helps understand the behavior of the fault estimationalgorithm when there is slow fault growth due to physical phenom-ena such as wear. Fig. 10 shows the results for a slow 200 s rampinput to the leakage control valve. Again, Fig. 10(a) shows theleakage coefficient and the input voltage to the leakage valve. Thetwo axes are scaled differently to allow comparison of the trackingability of the fault identification algorithm. Except for the initialerror, the algorithm is able to track the input very well.Fig. 10(b) show the comparison of the measured and the estimatedleakage flow rate. This figure also affirms the two physical phenom-ena of spikes and reduction in flow rate when piston stops movingas described earlier. Both these physical phenomenon are estimatedaccurately by the fault identification algorithm.
These results indicate that the estimation algorithm is accu-rate and consistent over different runs. Very low leakage rates aslow as .025 l/s were identified successfully. These results comparefavorably to a recent publication by Goharrizi, Sepehri, and Wu(2010). Very small leakage rates of up to .01 l/s are difficult toidentify as seen in Figs. 9(b) and 10(a). However, as leakagebecomes greater than .01 l/s, the estimates become very accurate.
Remark 1. The advantage of this methodology is the ability toidentify multiple fault as long as the faults can be modeledparametrically. As long as the faults enter the system equationthrough some physics, and models for those are included in thesystem equation, they will not affect the each other. If the modelsfor the faults are not included in the system equations, they willaffect the estimation. However, the effect of the unmodeleddynamics can be minimized by properly choosing the processcovariance matrix. A larger covariance matrix will mean moreuncertainty in the model or less confidence in the model. Thiswould result in a larger error covariance but the mean estimatewill still be reasonably accurate. If conservative estimates for theprocess covariance are available, the actual error covariance canbe guaranteed to be always less than calculated error covariance.
Remark 2. The main drawback of this methodology is that if thereare two faults which can be represented as simple additive para-meters in the same state equation, it would be difficult to distin-guish between them. These two faults can be represented as a singleparameter and its variation will be a combination of both faults.
6. Sensitivity to process noise covariance
The process noise covariance matrix given in Eq. (43) waschosen heuristically based on confidence in the mathematical

V. Mahulkar et al. / Control Engineering Practice 19 (2011) 649–657656
model used for the system as given by Eq. (6). For example for theleakage state estimate, a noise covariance value of 8� 10�6 wasused assuming that the leakage fault is caused by wear which is avery slow process. This value determines the speed at which theleakage coefficient estimate can respond to changes in the faultand the variability of the estimate. Fig. 11 shows the variation ofresponse for different process covariance values. The averagesteady-state value for a 5 V input is around 2.66. Fig. 12 showsthe variation of time required to reach 90% of steady-state valuewith process covariance value used for the leakage coefficientstate estimate. The basic principle of DDF follows the Kalmanfilter with a prediction update and a measurement update. Thebehavior can be explained by looking at the simple updateequations of a discrete Kalman filter. The first set of Eqs. (46)and (47) represent the prediction update and the second set(48)–(50) represent the measurement update:
xðkþ1Þ ¼ AxðkÞþBuðkÞ ð46Þ
Pðkþ1Þ ¼ APðkÞATþQ ð47Þ
0 10 20 30 40 500
1
2
3
4
5
6
Time (s)
Leak
age
coef
ficie
nt e
stim
ate
Ctm
8×10−4
1×10−4
4×10−5
8×10−6
8×10−7Input
Fig. 11. Behavior of leakage parameter Ctm estimation for different process
covariance values.
−1 0 1 2 3 4 5 6 7 8x 10−4
0
5
10
15
20
25
30
35
40
45
Process covariance value
Tim
e re
quire
d to
reac
h 90
% o
f ste
ady
stat
e
Fig. 12. Sensitivity of leakage parameter estimate response to corresponding
process covariance values.
Kðkþ1Þ ¼ Pðkþ1ÞHT ðHPðkþ1ÞHTþRÞ�1ð48Þ
xðkþ1Þ ¼ xðkþ1ÞþKðkþ1Þðyðkþ1Þ�Hxðkþ1ÞÞ ð49Þ
Pðkþ1Þ ¼ ðI�Kðkþ1ÞHÞPðkþ1Þ ð50Þ
As the a priori estimate error covariance Pðkþ1Þ approacheszero, or after the error covariances have converged and if Q issmall, the gain K weighs the residual less heavily. Specifically,
limP ðkþ1Þ-0
Kðkþ1Þ ¼ 0 ð51Þ
When this happens, the actual measurement is trusted less andless, while the prediction is trusted more and more. This results ina large inertia resulting in slow filter response to changes inmeasurements. Hence, as the process noise covariance isdecreased, the time taken to reach the 90% value increases asseen clearly in Fig. 12. This also results in smoother response.
7. Conclusions
An approach based on derivative free non-linear filtering wasdeveloped for detecting internal leakage faults in hydraulic actua-tors. The efficacy of this method was demonstrated by implement-ing it on an experimental testbed. The method was implemented inthe absence of external loading, but the authors speculate that themethod will be robust to any kind of loading that the positioncontrol strategy can accommodate because the estimation strategyworks very well despite the presence of unknown and highlyvariable frictional forces. The strategy identified the leakagecoefficients accurately and can be used in estimation of internalleakage as low as .01 l/s. This capability is very important in theidentification of incipient failures. In addition, when developingprognostics for such actuators, it is critical to identify the fault asearly as possible to ensure that predictive models can be identifiedin a timely manner. The sensitivity of the identification algorithmto the process noise covariance was also evaluated.
Appendix A. Glossary of symbols
xL
hydraulic piston position m mass of the piston A ram area PL load pressure b damping Ffc modeled Coulomb friction force ~f external disturbancesVt
total hydraulic volumebe
bulk modulus of oilCtm
internal leakage coefficient QL load flow Cd valve orifice coefficient of discharge w spool valve area gradient xv spool displacement tv spool time constant kv spool gain Ps supply pressure r oil density tvReferences
Alleyne, A., & Hedrick, K. J. (1995). Nonlinear adaptive control of active suspension.IEEE Transactions on Control System Technology, 3, 94–101.

V. Mahulkar et al. / Control Engineering Practice 19 (2011) 649–657 657
Alleyne, A., & Liu, R. (2000). A simplified approach to force control for electro-hydraulic systems. Control Engineering Practice, 8, 1347–1356.
An, L., & Sepehri, N. (2003). Hydraulic actuator circuit fault detection usingextended Kalman filters. In Proceedings of the American control conference(pp. 4261–4266).
Boutayeb, M., & Aubry, D. (1999). A strong tracking extended Kalman observer fornonlinear discrete-time systems. IEEE Transactions on Automatic Control, 44,1550–1556.
Cho, Y. M., & Rajamani, R. (1997). A systematic approach to adaptive observersynthesis for nonlinear systems. IEEE Transactions on Automatic Control, 42,534–537.
Dash, S., & Venkatasubhamanian, V. (2000). Challenges in industrial applications offault diagnosis systems. Computers and Chemical Engineering, 24, 785–791.
Garimella, P., & Yao, B. (2005). Model based fault detection of an electro-hydrauliccylinder. In American control conference (pp. 484–489).
Goharrizi, A. Y., Sepehri, N., & Wu, Y. (2010). A wavelet-based approach fordiagnosis of internal leakage in hydraulic actuators using on-line measure-ments. International Journal of Fluid Power, 11, 61–69.
Golub, G. H., & Loan, C. F. V. (1996). Matrix computations (3rd ed.). The JohnHopkins University Press.
Gunther, R. K., Yaz, S. E., & Unbehauen, R. (1999). Stochastic stability of thediscrete-time extended Kalman filter. IEEE Transactions on Automatic Control,44, 714–728.
Hammouri, H., Kabore, P., Othman, S., & Biston, J. (2002). Failure diagnosis andnonlinear observer. Application to a hydraulic process. Journal of the FranklinInstitute, 339, 455–478.
Isermann, R. (1984). Process fault detection based on modeling and estimationmethods—a survey. Automatica, 20, 387–404.
Isermann, R. (1993). Fault diagnosis of machines via parameter estimation andknowledge processing: Tutorial paper. Automatica (Journal of IFAC), 29,815–835.
Isermann, R. (2005). Model-based fault-detection and diagnosis—status andapplications. Annual Reviews in Control, 29, 71–85.
Isermann, R. (2006). Fault-diagnosis systems: An introduction from fault detection tofault tolerance. Berlin: Springer-Verlag.
Jelali, M., & Kroll, A. (2004). Hydraulic servo-systems: Modeling identification andcontrol. Springer.
Julier, S. J., & Uhlmann, J. K. (2004). Unscented filtering and nonlinear estimation.Proceedings of the IEEE, 92, 401–422.
Kudva, P., Vishwanadham, N., & Ramakrishna, A. (1980). Observers for linearsystems with unknown inputs. Automatica, 22, 333–344.
Lin, J. S., & Kanellakopoulos, I. (1995). Nonlinear design of active suspensions. IEEEControl Systems Magazine, 3, 45–49.
Ljung, L. (1979). Asymptotic behaviour of the extended Kalman filter as aparameter estimator for linear systems. IEEE Transactions on Automatic Control,24, 36–50.
Merritt, H. E. (1967). Hydraulic control systems. John Wiley and Sons.Norgaard, M., Poulsen, N. K., & Ravn, O. (2000). New developments in state
estimation for nonlinear systems. Automatica, 36, 1627–1638.Patton, R., Clark, R., & Frank, P. (1989). Fault diagnosis in dynamic systems: Theory
and applications. Prentice-Hall.Patton, R. J. (1991). Fault detection and diagnosis in aerospace systems using
analytical redundancy. Computing and Control Engineering Journal, 127–136.Patton, R. J., 1997. Fault-tolerant control systems: The 1997 situation. In IFAC
symposium on fault detection supervision and safety for technical processes (Vol.3, pp. 1033–1054).
Patton, R. J., & Chen, J. (1992). Robust fault detection of jet engine sensor systemsusing eigenstructure assignment. Journal of Guidance, Control, And Dynamics,15, 1491–1497.
Patton, R. J., & Chen, J. (1997). Robust fault detection using eigenstructureassignment: A tutorial consideration and some new results. Control Engineer-ing Practice, 5, 671–682.
Patton, R. J., Frank, P. M., & Clark, R. N. (2000) (Eds.), Issues of fault diagnosis fordynamic systems. Berlin: Springer-Verlag.
Preston, G. J., Shields, D. N., & Daley, S. (1996). Application of robust nonlinear faultdetection observer to a hydraulic process. In Proceedings of UKACC internationalconference on control (pp. 1484–1489).
Quine, B. M. (2006). A derivative-free implementation of the extended Kalmanfilter. Automatica, 42, 1927–1934.
Rajamani, R., & Hedrick, J. (1995). Adaptive observers for active automotivesuspensions: Theory and experiment. IEEE Transactions on Control SystemsTechnology, 3, 86–93.
Schei, T. S. (1997). A finite-difference method for linearization in nonlinearestimation algorithms. Automatica, 33, 2051–2058.
Shih, M. C., & Sheu, Y. R. (1991). The adaptive position control of an electrohydraulic servo cylinder. JSME International Journal, 34, 370–376.
Simon, D. (2006). Optimal state estimation: Kalman, H Infinity, and nonlinearapproaches. Hoboken, NJ, USA: John Wiley and Sons, Inc.
Sohl, G. A., & Bobrow, J. E. (1999). Experiments and simulations on the nonlinearcontrol of a hydraulic servosystem. IEEE Transactions on Control SystemsTechnology, 7, 238–247.
Tafazoli, S., de Silva, C., & Lawrence, P. (1998). Tracking control of an electro-hydraulic manipulator in the presence of friction. IEEE Transactions on ControlSystems Technology, 6, 401–411.
van der Merwe, R. W. E., Julier, S., Bogdanov, A., Harvey, G., & Hunt, J. (2004).Sigma-point Kalman filters for nonlinear estimation and sensor fusion:Applications to integrated navigation. In AIAA guidance navigation and controlconference.
Watton, J. (1992). Condition monitoring and fault diagnosis in fluid power systems.Wllis Horwood.
Yu, D. (1997). Fault diagnosis for a hydraulic drive system using a parameter-estimation method. Control Engineering Practice, 5, 1283–1297.