
Control de actuador AC 01.2/ACExC 01.2
160
Control → Paralelo Profibus DP Modbus RTU Modbus TCP/IP Foundation Fieldbus HART Control de actuador AC 01.2/ACExC 01.2 Operación y ajuste Manual
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Control de actuador AC 01.2/ACExC 01.2
Control
→ Paralelo
Profibus DP
Modbus RTU
Modbus TCP/IP
Foundation Fieldbus
HART
Control de actuador
AC 01.2/ACExC 01.2
Operación y ajusteManual
¡Lea primero las instrucciones!● Observe las instrucciones de seguridad.
Finalidad de este documento:
Este documento contiene información destinada al personal de puesta en servicio, operación y mantenimientoy su finalidad es ayudar en el manejo local del dispositivo y en el cambio de ajustes.
Documentos de referencia:● Instrucciones de servicio (montaje, manejo, puesta en servicio) del actuador
La documentación de referencia se puede conseguir en Internet: www.auma.com o se puede solicitar directamentea AUMA (véase <Direcciones>).
Índice Página
81. Instrucciones de seguridad...................................................................................................81.1. Requisitos para la manipulación segura del producto91.2. Rango de aplicación91.3. Avisos y advertencias91.4. Indicaciones y símbolos
112. Descripción breve..................................................................................................................
123. Operación................................................................................................................................123.1. Operación local del actuador123.2. Operación remota del actuador133.3. Manejo del menú mediante los pulsadores (para ajustes y visualización)143.3.1. Estructura y navegación153.4. Nivel de usuario, contraseña 163.4.1. Introducir contraseña163.4.2. Cambiar contraseña173.4.3. Bloqueo temporal en caso de entrada incorrecta de la contraseña173.5. Idioma en pantalla173.5.1. Cambiar idioma
194. Indicadores.............................................................................................................................194.1. Indicaciones durante la puesta en servicio194.2. Indicaciones en pantalla204.2.1. Señales de actuador y válvula224.2.2. Indicaciones de estado según la clasificación de AUMA234.2.3. Indicaciones de estado según la recomendación NAMUR254.3. Lámparas indicadoras en los mandos locales254.3.1. Cambiar el color de las lámparas indicadoras
275. Señales (señales de salida)...................................................................................................275.1. Señales de estado mediante contactos de salida (salidas digitales)275.1.1. Configuración de las salidas275.1.2. Codificación de las salidas275.2. Señales de estado configurables285.3. Señales analógicas (salidas analógicas)285.3.1. Asignación de la salida analógica 1295.3.2. Rango de señal de la salida analógica 1 295.3.3. Ajuste fino de la salida analógica 1 305.3.4. Asignación de la salida analógica 2
2
Control de actuadorÍndice AC 01.2/ACExC 01.2
305.3.5. Rango de señal de la salida analógica 2305.3.6. Ajuste fino de la salida analógica 2
316. Funcionamiento .....................................................................................................................316.1. Modo de operación Off 316.2. Modo de operación Local316.2.1. Contacto mantenido o Auto-retención Local326.3. Modo de operación Remoto326.3.1. Contacto mantenido o Auto-retención Remoto336.4. Modo de operación EMERGENCIA336.5. Modo de operación Paro de EMERGENCIA336.6. Modo de operación Bloqueado336.7. Modo de operación Servicio
357. Ajustes básicos para la puesta en servicio.........................................................................357.1. Tipo de desconexión para posiciones finales357.1.1. Ajuste del tipo de desconexión367.2. Limitadores de par377.2.1. Ajuste de los limitadores de par387.3. Final de carrera387.3.1. Ajustar el final de carrera417.3.2. Ajustar la posición final mediante la carrera437.4. Fecha y hora447.5. Formatos de visualización447.5.1. Formato de fecha447.5.2. Formato de hora447.5.3. Formato numérico447.5.4. Unidad de par457.5.5. Unidad de temperatura457.5.6. Unidades de posición467.5.7. Unidades de magnitud de procesos467.5.8. Unidades de valores de trabajo analógicos (AIN)477.5.9. Unidades de salidas de señal analógicas (AOUT)477.6. Contraste
488. Funciones de aplicación........................................................................................................488.1. Posiciones intermedias488.1.1. Definir puntos de pivote de las posiciones intermedias488.1.2. Ajustar el comportamiento de señal de las posiciones intermedias498.1.3. Ajustar la histéresis para las posiciones intermedias508.2. Perfil de actuación (comportamiento operativo) en posiciones intermedias508.2.1. Activar el perfil de actuación508.2.2. Establecer el comportamiento operativo para las posiciones intermedias (puntos de
pivote)518.2.3. Ajustar los tiempos de pausa para las posiciones intermedias (puntos de pivote)518.3. Control de dos hilos528.4. Posicionador (modo de operación Remoto SETPOINT):528.4.1. Activar el posicionador528.4.2. Activar/desactivar el comportamiento adaptativo538.4.3. Ajustar manualmente el post-recorrido (banda muerta interior) 548.4.4. Ajustar manualmente la desviación de regulación máx. (banda muerta exterior)548.4.5. Ajustar el tiempo muerto
3
Control de actuadorAC 01.2/ACExC 01.2 Índice
548.4.6. Ajustar la histéresis para el posicionador548.4.7. Cerrar herméticamente/abrir por completo (tolerancia de posiciones finales para el
setpoint)558.4.8. Limitar el rango de operación558.4.9. Cambio entre control ABRIR - CERRAR y control de setpoint568.4.10. Entrada Setpoint de posición568.4.11. Rango de entrada del setpoint de posición568.4.12. Funcionamiento con rango partido578.5. Controlador de procesos588.5.1. Activar el controlador de procesos588.5.2. Ajustar el comportamiento de regulación del controlador de procesos608.5.3. Origen de setpoint (entrada para setpoint de procesos)608.5.4. Comportamiento en caso de fallo de setpoint de procesos608.5.5. Operación inversa608.5.6. Setpoint de procesos interno618.5.7. Procedimiento para el ajuste618.5.8. Ajustar la ganancia proporcional Kp618.5.9. Ajustar el tiempo de reset Ti618.5.10. Ajustar el tiempo de acción Td628.5.11. Origen del valor real (entrada para el valor real del proceso)628.6. Modo por pasos 638.6.1. Activar el modo por pasos638.6.2. Modo de operación para modo por pasos648.6.3. Inicio y fin de modo por pasos648.6.4. Tiempos de marcha y tiempos de pausa648.7. Función de by-pass668.7.1. Activar la función de by-pass668.7.2. Configurar la aplicación de by-pass668.8. Lift Plug Valve (LPV)698.8.1. Activar la función LPV698.8.2. Configurar el tipo de actuador de la LPV708.8.3. Configurar el tiempo de retardo del actuador principal de la LPV708.8.4. Configurar el tiempo de retardo del actuador secundario de la LPV708.9. Sistema automático de lavado718.9.1. Activar la función Sistema automático de lavado718.9.2. Ajustar el tiempo de maniobra para la maniobra en sentido opuesto718.9.3. Ajustar el número de intentos de lavado718.9.4. Ajustar el rango de tolerancia728.10. Sistema de calefacción y calefacciones728.10.1. Sistema de calefacción en el control728.10.2. Calefacción de la unidad de mando (actuador)738.10.3. Calefacción del motor
749. Funciones de seguridad........................................................................................................749.1. Tiempo de bloqueo de inversión749.2. Comportamiento en fallo en caso de pérdida de señal749.2.1. Comportamiento de activación en caso de pérdida de señal759.2.2. Ajustar el origen del fallo (motivo del fallo) para una maniobra de fallo759.2.3. Operación en fallo (reacción del actuador) en caso de pérdida de señal769.2.4. Establecer la posición de seguridad769.2.5. Establecer la posición de seguridad de la MPV
4
Control de actuadorÍndice AC 01.2/ACExC 01.2
769.2.6. Ajustar el tiempo de retardo769.3. Comportamiento de EMERGENCIA779.3.1. Activar el comportamiento de EMERGENCIA789.3.2. Comportamiento de activación de EMERGENCIA789.3.3. Ajustar el origen del fallo (motivo del fallo) para una operación de EMERGENCIA789.3.4. Modo de operación para comportamiento de EMERGENCIA799.3.5. Operación de EMERGENCIA799.3.6. Posición de EMERGENCIA799.3.7. Posición de EMERGENCIA de MPV799.3.8. By-pass de limitadores de par809.3.9. By-pass de protección de motor 809.3.10. By-pass de temporizador809.3.11. By-pass del perfil de actuación809.3.12. By-pass de interlock819.3.13. By-pass de paro local819.3.14. Ajustar el retardo para el comportamiento de EMERGENCIA819.4. Habilitación de los mandos locales829.4.1. Activar la función de habilitación829.4.2. Comportamiento de la función de habilitación829.5. Prioridad REMOTO839.5.1. Activar Prioridad REMOTO839.5.2. Comportamiento de Prioridad REMOTO849.6. Interlock (habilitación de órdenes de maniobra)849.6.1. Activar Interlock859.6.2. Ajustar el origen de fallo para la señal de habilitación de Interlock859.6.3. Modo de operación para Interlock859.6.4. Comportamiento de Interlock (sentido de maniobra)859.7. Paro local869.7.1. Comportamiento operativo869.8. Función Paro de EMERGENCIA879.9. Partial Valve Stroke Test (PVST)879.9.1. Activar el PVST889.9.2. Ajustar el origen de fallo para el PVST889.9.3. Modo de operación para el PVST889.9.4. Establecer el comportamiento operativo del PVST889.9.5. Ajustar una carrera parcial para el PVST899.9.6. Ajustar el tiempo de vigilancia para el PVST899.9.7. Ajustar el tiempo de maniobra para el PVST899.9.8. Ajustar el tiempo de inversión para el PVST899.9.9. Recordatorio para PVST909.10. Interface Bluetooth activable y desconectable
9310. Funciones de vigilancia.........................................................................................................9310.1. Vigilancia de par9310.1.1. By-pass de limitador de par9410.1.2. Limitación de par del by-pass de limitador de par9510.2. Vigilancia de protección del motor (vigilancia térmica)9510.3. Vigilancia del modo de operación (arrancadas y tiempo de marcha del motor)9710.4. Vigilancia del tiempo de maniobra9710.5. Vigilancia de reacción 9810.6. Detección de movimiento
5
Control de actuadorAC 01.2/ACExC 01.2 Índice
9810.6.1. Activar la detección de movimiento9810.6.2. Tiempo de detección dt9910.6.3. Diferencia de recorrido dx9910.6.4. Tiempo de retardo9910.7. Vigilancia de la alimentación de tensión del sistema electrónico
10010.8. Vigilancia de la temperatura10010.9. Vigilancia del sistema de calefacción/la calefacción10110.10. Comprobación de sub-conjuntos10110.11. Vigilancia de pérdida de fase10210.12. Detección de secuencia de fases y corrección del sentido de giro
10311. Activar y habilitar funciones.................................................................................................10311.1. Activar10311.2. Habilitar
10512. Variantes de producto............................................................................................................10512.1. Funciones de multiport valve10512.1.1. Ajustar/comprobar el tipo de actuador10512.1.2. Ajustar/comprobar la desmultiplicación del reductor10612.1.3. Número de puertos (posiciones)10612.1.4. Establecer Homeport (ajuste cero)10712.1.5. Fijar/comprobar las posiciones (de las conexiones de válvula)10712.1.6. Maniobra a posición mediante los pulsadores de los mandos locales10912.1.7. Maniobra remota a posición10912.1.8. Banda muerta11012.1.9. Corrección de post-recorrido11012.1.10. Compensación de holgura11012.1.11. Ajustar/comprobar el comportamiento de señal de las posiciones11112.1.12. Ajustar la histéresis para la señal de las posiciones intermedias
11213. Funciones de servicio...........................................................................................................11213.1. Sentido de giro11213.2. Ajustes de fábrica11313.3. Recargar idiomas11313.4. Exportación de datos11413.5. Importación de datos11413.6. Aceptar la configuración real actual11413.7. Actualización del firmware11413.8. Software de servicio
11614. Diagnosis................................................................................................................................11614.1. Identificación electrónica del dispositivo11614.2. Diagnosis de conexión Bluetooth11714.3. Diagnosis de interface11814.4. Diagnosis para transmisor de posición y potenciómetro11914.5. Diagnosis del transmisor de posición RWG11914.6. Diagnosis del transmisor de posición MWG11914.7. Diagnosis del posicionador12014.8. Diagnosis de vigilancia de duración de conexión (ED)12014.9. Diagnosis de controlador de procesos12014.10. Diagnosis FQM (Fail-Safe)12114.11. Simulación (acción de comprobación y test)12114.11.1. Señales del actuador
6
Control de actuadorÍndice AC 01.2/ACExC 01.2
12114.11.2. Señales de interface
12315. Asset Management.................................................................................................................12315.1. Datos operativos12415.2. Protocolo de eventos12515.3. Curvas características12515.3.1. Curva característica de par-carrera12715.3.2. Curva característica de posición-tiempo12815.3.3. Curva característica de temperatura-tiempo12915.4. Histogramas12915.4.1. Tiempo de marcha del motor-Posición (histograma)12915.4.2. Tiempo de marcha del motor-Temperatura (histograma)13015.4.3. Tiempo de marcha del motor-Par (histograma)13115.5. Mantenimiento (informaciones y señales)13215.6. Mostrar tiempos de operación13315.7. Mostrar las temperaturas del dispositivo
13416. Solución de fallos...................................................................................................................13416.1. Fusibles primarios13416.2. Señales de fallo y avisos
14217. Anexo......................................................................................................................................14217.1. Lista de selección de contactos de salida y lámparas indicadoras (salidas digitales DOUT)14617.2. Lista de selección de señales binarias para entradas digitales (DIN)
149Índice alfabético.....................................................................................................................
154Relación de parámetros.........................................................................................................
7
Control de actuadorAC 01.2/ACExC 01.2 Índice
1. Instrucciones de seguridad
1.1. Requisitos para la manipulación segura del producto
Normas/Directivas El usuario de la instalación y el constructor de la misma deberán observar todos losrequisitos legales, directivas, disposiciones, reglamentos nacionales yrecomendaciones en lo tocante a montaje, instalación eléctrica, puesta en servicioy funcionamiento en el lugar de instalación.
Entre ellos se encuentran, por ejemplo, normas y directivas como la IEC 60079«Atmósferas explosivas»:
● Parte 14: Diseño, elección y realización de instalaciones eléctricas.● Parte 17: Inspección y mantenimiento de instalaciones eléctricas.
Instrucciones de seguri-dad/
Avisos
Las personas que trabajen con este dispositivo deben familiarizarse con lasinstrucciones de seguridad y las indicaciones de aviso de estas instrucciones ydeben observarlas. Las instrucciones de seguridad y las indicaciones de aviso enel producto se deben observar para evitar daños personales y materiales.
Cualificación del perso-nal
El montaje, la conexión eléctrica, la puesta en servicio, la operación y elmantenimiento deben ser realizados sólo por personal especializado y formado quehaya sido autorizado por el usuario de la instalación o por el constructor de la misma.
Antes de proceder a trabajar con este producto, el personal debe haber leído yentendido estas instrucciones, así como conocer y observar los reglamentosreconocidos en materia de seguridad laboral.
Los trabajos en zona Ex están sometidos a disposiciones especiales que se debenobservar. El usuario de la instalación o el constructor de la misma son losresponsables de la observancia y control de estas disposiciones, normas y leyes.
Cargaelectrostática
Deben excluirse en todo momento los procesos de generación de cargas fuertes(procesos más fuertes que la fricción manual) en la superficie del dispositivo, ya queestos pueden dar lugar a descargas en penacho con deslizamiento superficial y,por lo tanto, a la ignición de una atmósfera explosiva.
Esto también se aplica a los revestimientos o envoltorios de protección contra elfuego disponibles opcionalmente.
Peligros de ignición Para los reductores se ha realizado una evaluación de los peligros de ignición segúnDIN EN ISO 80079-36/ -37 conforme al estado actual de las normas. Las superficiescalientes, las chispas generadas mecánicamente, así como la electricidad estáticay las corrientes eléctricas de compensación, se han identificado y evaluado comoimportantes fuentes potenciales de ignición. En consecuencia, se han aplicado alos reductores medidas de protección para evitar que las fuentes de ignición sehagan efectivas. Esto incluye en particular la lubricación del reductor, el grado deprotección IP y las indicaciones (de aviso) de estas instrucciones de servicio.
Puesta en servicio Antes de proceder a la puesta en servicio se debe comprobar si todos los ajustescoinciden con los requisitos de la aplicación. Un ajuste incorrecto puede suponerpeligros relacionados con la aplicación, como p. ej., el deterioro de la válvula o dela instalación. El fabricante no se hará responsable de los posibles daños resultantesde ello. Ese riesgo será asumido completamente por el usuario.
Funcionamiento Condiciones para una operación correcta y segura:
● Transporte, almacenamiento, colocación, montaje y puesta en servicio correctos.● Operar el producto sólo en un estado perfecto bajo observancia de estas ins-
trucciones.● Informar inmediatamente de fallos y daños y eliminarlos (encomendar su elimi-
nación).● Observar los reglamentos reconocidos de seguridad laboral.● Observar las disposiciones nacionales.
8
Control de actuadorInstrucciones de seguridad AC 01.2/ACExC 01.2
● Durante el funcionamiento, la carcasa se calienta y las temperaturas de sussuperficies pueden llegar a ser > 60 °C. Como protección contra posiblesquemaduras, recomendamos medir la temperatura del dispositivo con un ter-mómetro adecuado antes de proceder a realizar los trabajos y, de ser necesario,utilizar guantes protectores.
Medidas de seguridad El responsable de la toma de medidas de seguridad necesarias en el lugar de lainstalación, como cubiertas o dispositivos de protección personal, es el usuario dela instalación o el constructor de la misma.
Mantenimiento Las instrucciones de mantenimiento aquí descritas deben ser observadas para podergarantizar un funcionamiento seguro del dispositivo.
Los cambios en el dispositivo solo están permitidos previo consentimiento por escritodel fabricante.
1.2. Rango de aplicación
Los controles de actuador de AUMA están diseñados exclusivamente para lamaniobra de actuadores de AUMA.
Otras aplicaciones precisan de la autorización expresa (por escrito) del fabricante.Así, su uso no está permitido para:
● Control de motores● Control de bombasNo nos responsabilizaremos por las consecuencias que pueda acarrear un usoincorrecto o no adecuado.
La observancia de estas instrucciones se considera como parte del uso adecuado.
1.3. Avisos y advertencias
Para resaltar procesos relevantes para la seguridad en estas instrucciones, tienenvalidez las siguientes indicaciones de aviso que vienen caracterizadas con la palabrade advertencia correspondiente (PELIGRO, ADVERTENCIA, ATENCIÓN, AVISO).
Situación peligrosa inmediata con alto riesgo. La no observancia de este avisotiene como consecuencia la muerte o graves lesiones para la salud.
Situación posiblemente peligrosa con riesgo medio. La no observancia deeste aviso puede suponer la muerte o graves lesiones para la salud.
Situación posiblemente peligrosa con riesgo bajo. La no observancia de esteaviso puede suponer lesiones leves o de gravedad media. Puede utilizarsetambién en combinación con la advertencia de daños materiales.
Situación posiblemente peligrosa. La no observancia de este aviso puedeacarrear daños materiales. No se utiliza para advertir de daños personales.
El símbolo de seguridad avisa del peligro de sufrir lesiones.
La palabra señalizadora (aquí, PELIGRO) indica el grado del riesgo.
1.4. Indicaciones y símbolos
En estas instrucciones se utilizan las siguientes indicaciones y símbolos:
Información El término Información que precede al texto da importantes indicaciones e informa-ciones.
Símbolo para CERRADO (válvula cerrada).
9
Control de actuadorAC 01.2/ACExC 01.2 Instrucciones de seguridad
Símbolo para ABIERTO (válvula abierta).
Mediante el menú al parámetro
Describe la ruta en el menú hasta el parámetro. Mediante los pulsadores de losmandos locales se puede encontrar rápidamente en la pantalla el parámetro buscado.Los textos de pantalla se presentan con fondo gris: Pantalla.
➥ Resultado de una intervención
Describe el resultado de la intervención anterior.
10
Control de actuadorInstrucciones de seguridad AC 01.2/ACExC 01.2
2. Descripción breve
Control de actuador El control de actuador sirve para controlar los actuadores AUMA y se entrega listopara funcionar.
Las funciones del control de actuador van desde el control convencional de la válvulaen la operación ABRIR – CERRAR, hasta las regulaciones de posición, regulacionesde procesos, registro de datos de servicio y las funciones de diagnosis.
Mandos locales/AUMA CDT
La operación, los ajustes y las visualizaciones se pueden realizar localmente en elcontrol de actuador.
Localmente, existe la posibilidad
● De manejar el actuador y realizar ajustes mediante los mandos locales (pulsa-dores y pantalla) (contenido de estas instrucciones).
● De, con ayuda del software AUMA CDT (accesorio) y un ordenador (portátil oPC), leer y seleccionar datos, cambiar ajustes y guardarlos. La conexión entreel ordenador y el control de actuador es inalámbrica mediante interface Blue-tooth (no forma parte de estas instrucciones).
Intrusivo - No intrusivo● Modelo intrusivo (unidad de mando: electro-mecánica):
El ajuste de carrera y de par se realiza mediante un interruptor en el actuador.● Modelo no intrusivo (unidad de mando: electrónica):
El ajuste de carrera y de par se realiza mediante el control de actuador, paralo que no es necesario abrir la carcasa del actuador ni la del control. Para ellose ha montado un MWG (transmisor magnético de carrera y par) en el actuadorque posibilita también una señal analógica de respuesta/visualización del pary una señal de posición/indicador de posición analógica/o en una salida delcontrol de actuador.
11
Control de actuadorAC 01.2/ACExC 01.2 Descripción breve
3. Operación
3.1. Operación local del actuador
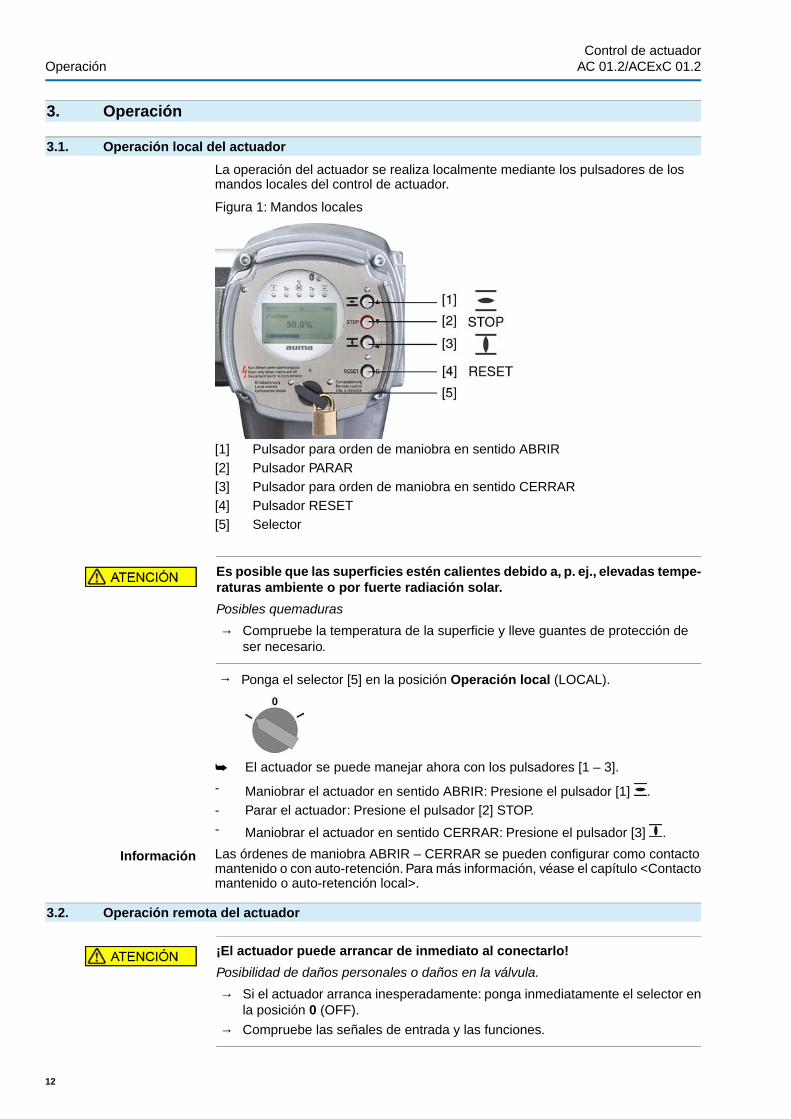
La operación del actuador se realiza localmente mediante los pulsadores de losmandos locales del control de actuador.
Figura 1: Mandos locales
[1] Pulsador para orden de maniobra en sentido ABRIR[2] Pulsador PARAR[3] Pulsador para orden de maniobra en sentido CERRAR[4] Pulsador RESET[5] Selector
Es posible que las superficies estén calientes debido a, p. ej., elevadas tempe-raturas ambiente o por fuerte radiación solar.
Posibles quemaduras
→ Compruebe la temperatura de la superficie y lleve guantes de protección deser necesario.
→ Ponga el selector [5] en la posición Operación local (LOCAL).
➥ El actuador se puede manejar ahora con los pulsadores [1 – 3].
- Maniobrar el actuador en sentido ABRIR: Presione el pulsador [1] .- Parar el actuador: Presione el pulsador [2] STOP.- Maniobrar el actuador en sentido CERRAR: Presione el pulsador [3] .
Información Las órdenes de maniobra ABRIR – CERRAR se pueden configurar como contactomantenido o con auto-retención. Para más información, véase el capítulo <Contactomantenido o auto-retención local>.
3.2. Operación remota del actuador
¡El actuador puede arrancar de inmediato al conectarlo!
Posibilidad de daños personales o daños en la válvula.
→ Si el actuador arranca inesperadamente: ponga inmediatamente el selector enla posición 0 (OFF).
→ Compruebe las señales de entrada y las funciones.
12
Control de actuadorOperación AC 01.2/ACExC 01.2
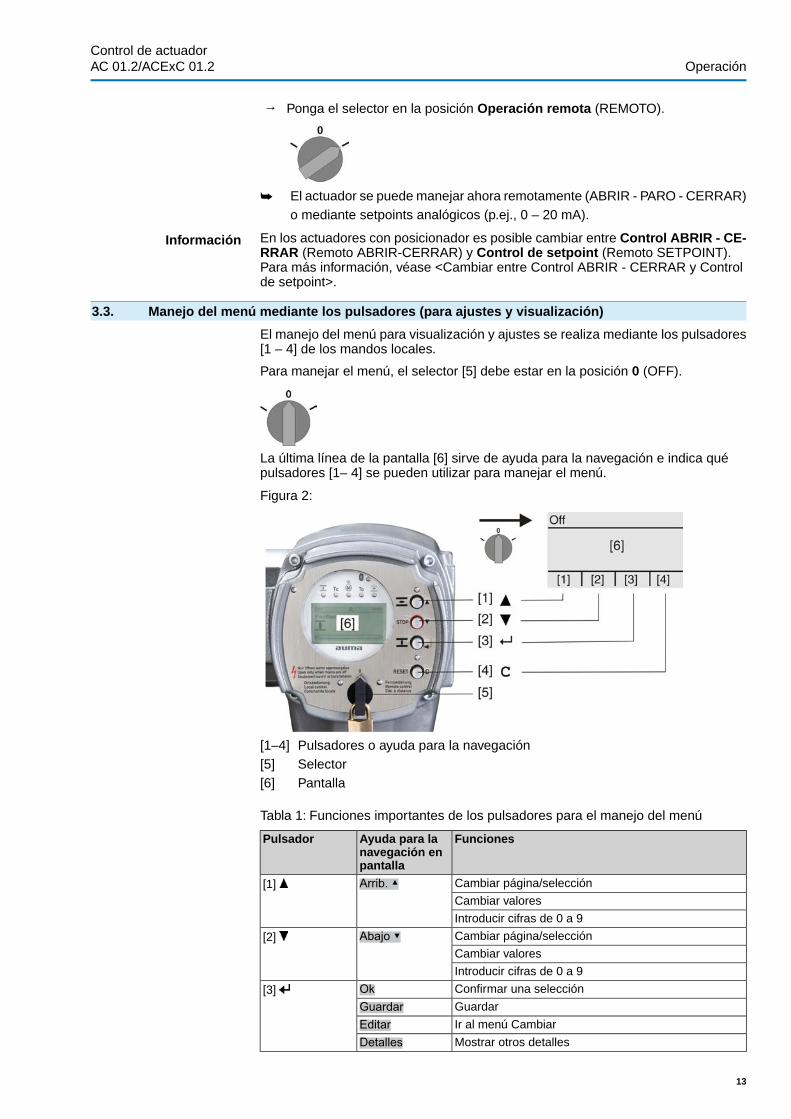
→ Ponga el selector en la posición Operación remota (REMOTO).
➥ El actuador se puede manejar ahora remotamente (ABRIR - PARO - CERRAR)o mediante setpoints analógicos (p.ej., 0 – 20 mA).
Información En los actuadores con posicionador es posible cambiar entre Control ABRIR - CE-RRAR (Remoto ABRIR-CERRAR) y Control de setpoint (Remoto SETPOINT).Para más información, véase <Cambiar entre Control ABRIR - CERRAR y Controlde setpoint>.
3.3. Manejo del menú mediante los pulsadores (para ajustes y visualización)
El manejo del menú para visualización y ajustes se realiza mediante los pulsadores[1 – 4] de los mandos locales.
Para manejar el menú, el selector [5] debe estar en la posición 0 (OFF).
La última línea de la pantalla [6] sirve de ayuda para la navegación e indica quépulsadores [1– 4] se pueden utilizar para manejar el menú.
Figura 2:
[1–4] Pulsadores o ayuda para la navegación[5] Selector[6] Pantalla
Tabla 1: Funciones importantes de los pulsadores para el manejo del menú
FuncionesAyuda para lanavegación enpantalla
Pulsador
Cambiar página/selecciónArrib. ▲[1] Cambiar valores
Introducir cifras de 0 a 9
Cambiar página/selecciónAbajo ▼[2] Cambiar valores
Introducir cifras de 0 a 9
Confirmar una selecciónOk[3] GuardarGuardarIr al menú CambiarEditarMostrar otros detallesDetalles
13
Control de actuadorAC 01.2/ACExC 01.2 Operación
FuncionesAyuda para lanavegación enpantalla
Pulsador
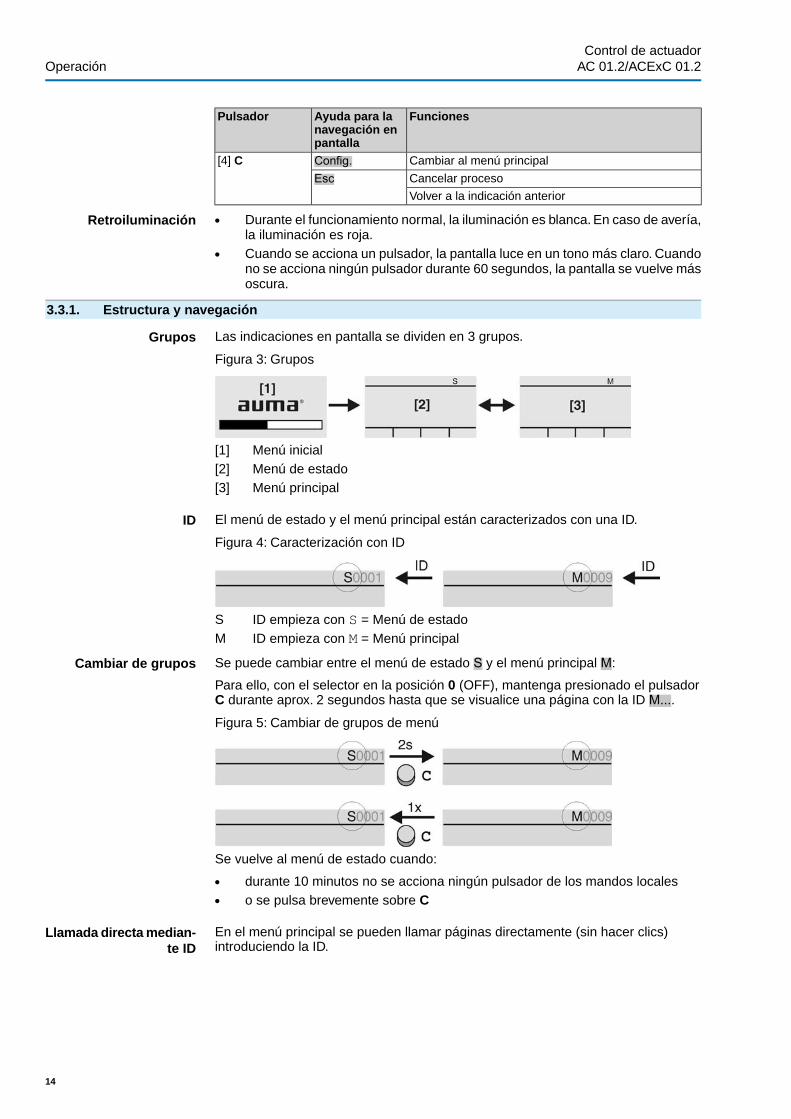
Cambiar al menú principalConfig.[4] CCancelar procesoEscVolver a la indicación anterior
Retroiluminación ● Durante el funcionamiento normal, la iluminación es blanca. En caso de avería,la iluminación es roja.
● Cuando se acciona un pulsador, la pantalla luce en un tono más claro. Cuandono se acciona ningún pulsador durante 60 segundos, la pantalla se vuelve másoscura.
3.3.1. Estructura y navegación
Grupos Las indicaciones en pantalla se dividen en 3 grupos.
Figura 3: Grupos
[1] Menú inicial[2] Menú de estado[3] Menú principal
ID El menú de estado y el menú principal están caracterizados con una ID.
Figura 4: Caracterización con ID
S ID empieza con S = Menú de estadoM ID empieza con M = Menú principal
Cambiar de grupos Se puede cambiar entre el menú de estado S y el menú principal M:
Para ello, con el selector en la posición 0 (OFF), mantenga presionado el pulsadorC durante aprox. 2 segundos hasta que se visualice una página con la ID M....Figura 5: Cambiar de grupos de menú
Se vuelve al menú de estado cuando:
● durante 10 minutos no se acciona ningún pulsador de los mandos locales● o se pulsa brevemente sobre C
Llamada directa median-te ID
En el menú principal se pueden llamar páginas directamente (sin hacer clics)introduciendo la ID.
14
Control de actuadorOperación AC 01.2/ACExC 01.2
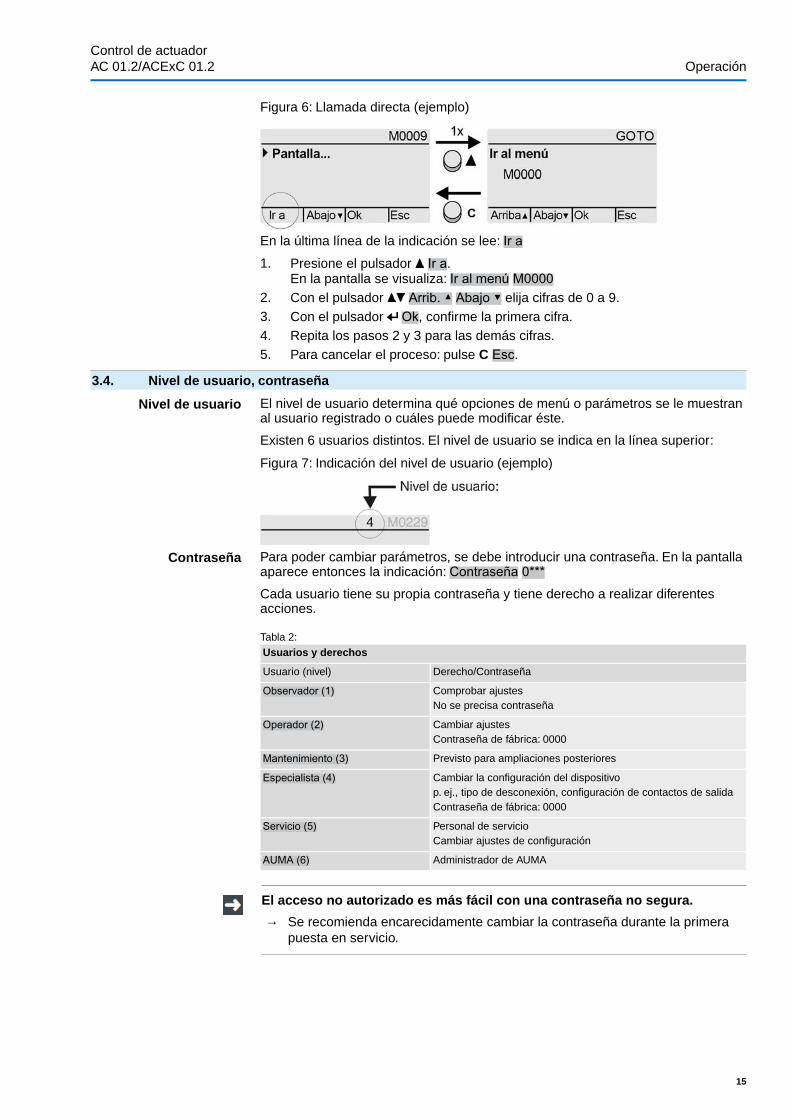
Figura 6: Llamada directa (ejemplo)
En la última línea de la indicación se lee: Ir a1. Presione el pulsador Ir a.
En la pantalla se visualiza: Ir al menú M00002. Con el pulsador Arrib. ▲ Abajo ▼ elija cifras de 0 a 9.3. Con el pulsador Ok, confirme la primera cifra.4. Repita los pasos 2 y 3 para las demás cifras.5. Para cancelar el proceso: pulse C Esc.
3.4. Nivel de usuario, contraseña
Nivel de usuario El nivel de usuario determina qué opciones de menú o parámetros se le muestranal usuario registrado o cuáles puede modificar éste.
Existen 6 usuarios distintos. El nivel de usuario se indica en la línea superior:
Figura 7: Indicación del nivel de usuario (ejemplo)
Contraseña Para poder cambiar parámetros, se debe introducir una contraseña. En la pantallaaparece entonces la indicación: Contraseña 0***Cada usuario tiene su propia contraseña y tiene derecho a realizar diferentesacciones.
Tabla 2:Usuarios y derechos
Derecho/ContraseñaUsuario (nivel)
Comprobar ajustesNo se precisa contraseña
Observador (1)
Cambiar ajustesContraseña de fábrica: 0000
Operador (2)
Previsto para ampliaciones posterioresMantenimiento (3)
Cambiar la configuración del dispositivop. ej., tipo de desconexión, configuración de contactos de salidaContraseña de fábrica: 0000
Especialista (4)
Personal de servicioCambiar ajustes de configuración
Servicio (5)
Administrador de AUMAAUMA (6)
El acceso no autorizado es más fácil con una contraseña no segura.
→ Se recomienda encarecidamente cambiar la contraseña durante la primerapuesta en servicio.
15
Control de actuadorAC 01.2/ACExC 01.2 Operación
3.4.1. Introducir contraseña
1. Seleccione el menú que desee y mantenga presionado el pulsador duranteaprox. 3 segundos.
➥ La indicación muestra el nivel de usuario ajustado, p. ej., Observador (1)2. Con Arrib. ▲ seleccione un nivel de usuario más alto y confirme con Ok.
➥ En la pantalla se visualiza: Contraseña 0***3. Con el pulsador Arrib. ▲ Abajo ▼, elija cifras de 0 a 9.4. Con el pulsador Ok, confirme la primera cifra de la contraseña.5. Repita los pasos 3 y 4 para las demás cifras.
➥ Cuando se haya confirmado la última cifra con Ok, se podrá acceder a todoslos parámetros dentro del nivel de usuario si se ha introducido correctamentela contraseña.
3.4.2. Cambiar contraseña
Sólo se pueden cambiar las contraseñas que tengan el mismo nivel de usuario ouno inferior.
Ejemplo: El usuario está registrado como Especialista (4), entonces puede cambiarlas contraseñas de los niveles de usuario (1) a (4).
Config. dispositivo M0053Funciones de servicio M0222Cambiar contraseñas M0229
La opción de menú Funciones de servicio M0222 está sólo visible cuando el nivelde usuario está ajustado a Especialista (4) o superior.
Seleccionar el menúprincipal
1. Ponga el selector en la posición 0 (OFF).
2. Mantenga presionado el pulsador C Config. durante aprox. 3 segundos.
➥ La indicación cambia al menú principal y muestra: ▶ Pantalla...Cambiar contraseñas 3. Seleccione los parámetros Cambiar contraseñas, o bien:
→ mediante el menú haciendo clic hasta el parámetro, o bien→ mediante llamada directa: pulse e introduzca la ID M0229
- En la pantalla se visualiza: ▶ Cambiar contraseñas- En la primera línea se indica el nivel del usuario (1 – 6), p. ej.:
- En el nivel de usuario 1 (sólo visualizar) no se puede cambiar ninguna contra-seña. Para cambiar contraseñas se debe cambiar a un nivel de usuario superior.Para ello se debe introducir una contraseña mediante un parámetro.
4. En un nivel de usuario de 2 – 6: presione el pulsador Ok.
➥ La indicación muestra el nivel de usuario más alto, p. ej.: Para usuario 45. Con el pulsador Arrib. ▲ Abajo ▼ seleccione el nivel de usuario y confirme
con Ok.
➥ En la pantalla se visualiza: ▶ Cambiar contraseñas Contraseña 0***6. Introduzca la contraseña actual (→ Introducir contraseña).
➥ En la pantalla se visualiza: ▶ Cambiar contraseñas Contraseña (nueva) 0***
16
Control de actuadorOperación AC 01.2/ACExC 01.2
7. Introduzca la contraseña nueva (→ Introducir contraseña).
➥ En la pantalla se visualiza: ▶ Cambiar contraseñas Para usuario 4 (ejemplo)
8. Con el pulsador Arrib. ▲ Abajo ▼ seleccione el nivel de usuario siguiente ocancele el proceso con Esc.
3.4.3. Bloqueo temporal en caso de entrada incorrecta de la contraseña
El control de actuador está equipado con un bloqueo temporal en caso de entradaincorrecta de la contraseña. De este modo se evita el uso no autorizado medianteel procedimiento de prueba y error sistemático. El bloqueo temporal se activa tantoen caso de entradas incorrectas a través de los mandos locales, como en caso deentradas incorrectas mediante herramientas de software (AUMA CDT, app AUMAAssistant). Tras cinco intentos fallidos consecutivos se bloquea la entrada duranteun minuto. Tras cada intento fallido siguiente, este tiempo de bloqueo se duplica.El bloqueo activo se visualiza en la pantalla. Cada nivel de usuario tiene un bloqueotemporal individual. Esto significa que, por ejemplo, si el nivel de usuario 4 estábloqueado, puede iniciar sesión con el nivel de usuario 3.
El contador de intentos fallidos se restablece de dos maneras:
1. Mediante una autorización exitosa con la contraseña correcta.2. Transcurridas ocho horas tras el último intento fallido.
3.5. Idioma en pantalla
El idioma en pantalla se puede cambiar.
3.5.1. Cambiar idioma
Pantalla... M0009Idioma M0049
Seleccionar el menúprincipal
1. Ponga el selector en la posición 0 (OFF).
2. Mantenga presionado el pulsador C Config. durante aprox. 3 segundos.
➥ La indicación cambia al menú principal y muestra: ▶ Pantalla...Cambiar idioma 3. Pulse Ok .
➥ En la pantalla se visualiza: ▶ Idioma4. Pulse Ok .
➥ La indicación muestra el idioma ajustado, p. ej.: ▶ Deutsch5. La última línea de la indicación muestra:
→ Guardar → continúe con el paso 10→ Editar → continúe con el paso 6
6. Pulse Editar .➥ En la pantalla se visualiza: ▶ Observador (1)7. Con Arrib. ▲ Abajo ▼ seleccione el nivel de usuario, los símbolos significan:
→ triángulo negro: ▶ = ajuste actual→ triángulo blanco: ▷ = selección (aún sin guardar)
8. Pulse Ok .
➥ En la pantalla se visualiza: Contraseña 0***9. Introduzca la contraseña (→ Introducir contraseña).
➥ En la pantalla se visualiza: ▶ Idioma y Guardar (última línea)
17
Control de actuadorAC 01.2/ACExC 01.2 Operación

Selección de idioma 10. Seleccione un nuevo idioma con Arrib. ▲ Abajo ▼, los símbolos significan:→ triángulo negro: ▶ = ajuste actual→ triángulo blanco: ▷ = selección (aún sin guardar)
11. Confirme la selección con Guardar.➥ La indicación cambia al nuevo idioma. El nuevo ajuste de idioma se ha guarda-
do.
18
Control de actuadorOperación AC 01.2/ACExC 01.2
4. Indicadores
4.1. Indicaciones durante la puesta en servicio
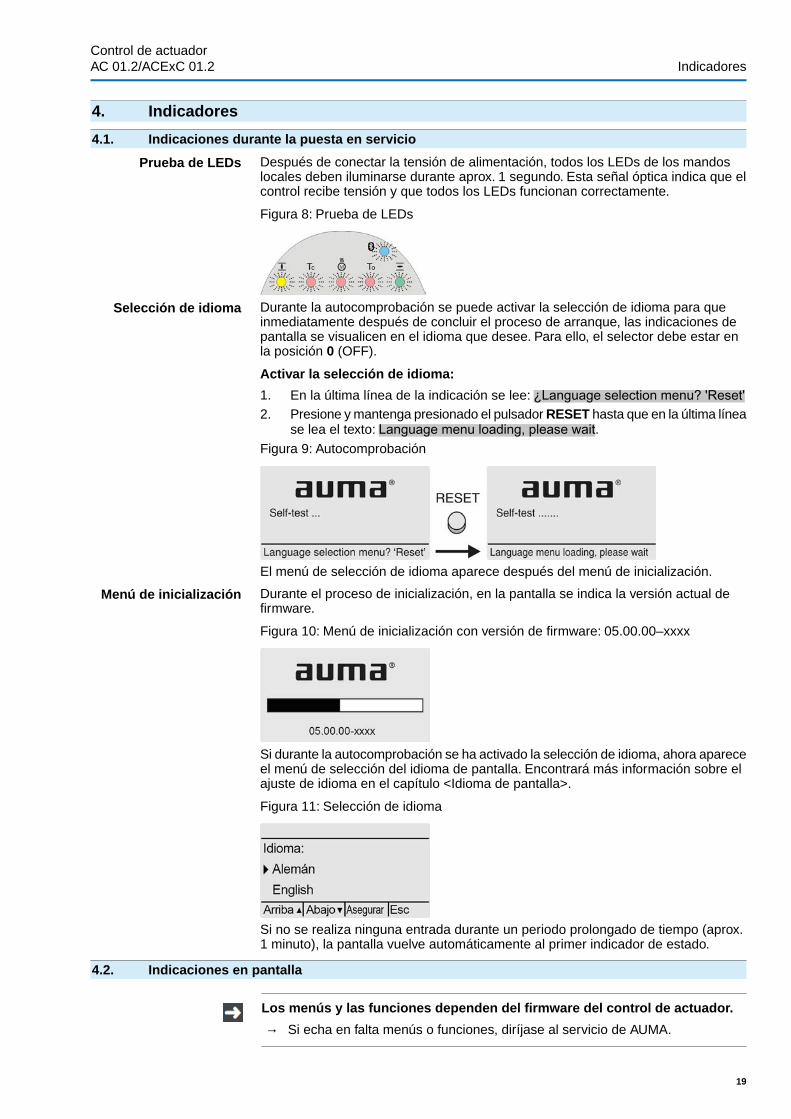
Prueba de LEDs Después de conectar la tensión de alimentación, todos los LEDs de los mandoslocales deben iluminarse durante aprox. 1 segundo. Esta señal óptica indica que elcontrol recibe tensión y que todos los LEDs funcionan correctamente.
Figura 8: Prueba de LEDs
Selección de idioma Durante la autocomprobación se puede activar la selección de idioma para queinmediatamente después de concluir el proceso de arranque, las indicaciones depantalla se visualicen en el idioma que desee. Para ello, el selector debe estar enla posición 0 (OFF).
Activar la selección de idioma:
1. En la última línea de la indicación se lee: ¿Language selection menu? 'Reset'2. Presione y mantenga presionado el pulsador RESET hasta que en la última línea
se lea el texto: Language menu loading, please wait.Figura 9: Autocomprobación
El menú de selección de idioma aparece después del menú de inicialización.
Menú de inicialización Durante el proceso de inicialización, en la pantalla se indica la versión actual defirmware.
Figura 10: Menú de inicialización con versión de firmware: 05.00.00–xxxx
Si durante la autocomprobación se ha activado la selección de idioma, ahora apareceel menú de selección del idioma de pantalla. Encontrará más información sobre elajuste de idioma en el capítulo <Idioma de pantalla>.
Figura 11: Selección de idioma
Si no se realiza ninguna entrada durante un periodo prolongado de tiempo (aprox.1 minuto), la pantalla vuelve automáticamente al primer indicador de estado.
4.2. Indicaciones en pantalla
Los menús y las funciones dependen del firmware del control de actuador.
→ Si echa en falta menús o funciones, diríjase al servicio de AUMA.
19
Control de actuadorAC 01.2/ACExC 01.2 Indicadores
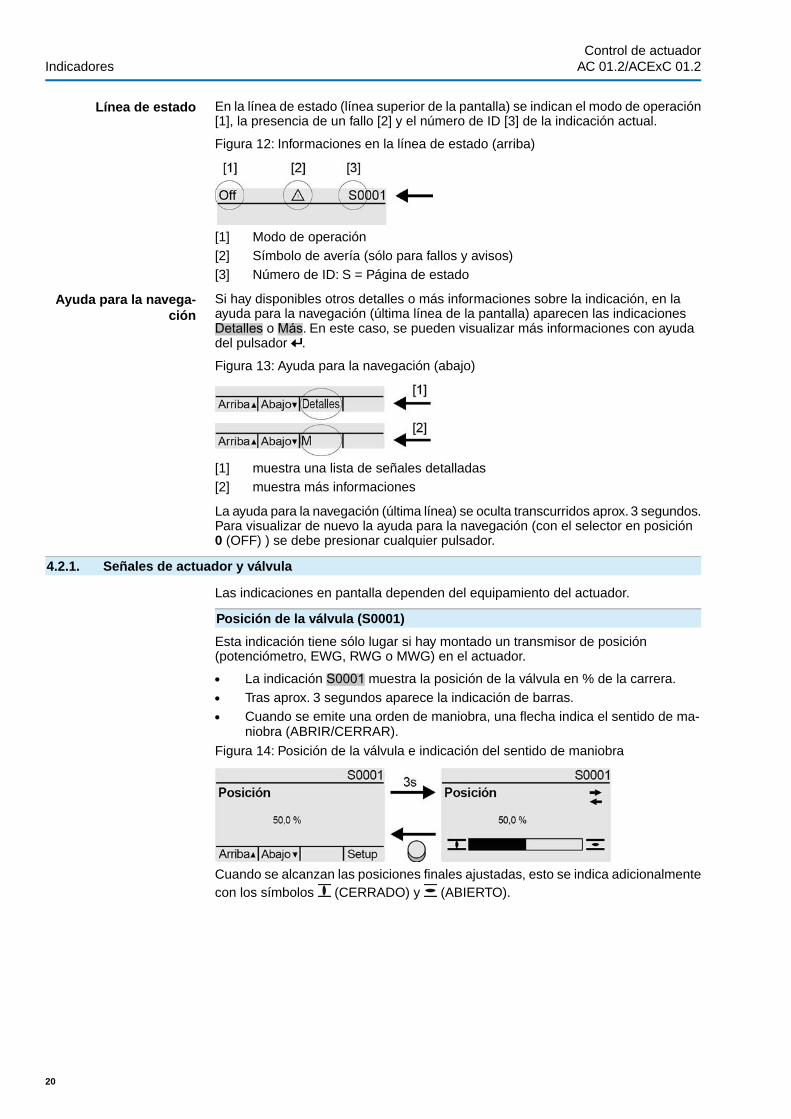
Línea de estado En la línea de estado (línea superior de la pantalla) se indican el modo de operación[1], la presencia de un fallo [2] y el número de ID [3] de la indicación actual.
Figura 12: Informaciones en la línea de estado (arriba)
[1] Modo de operación[2] Símbolo de avería (sólo para fallos y avisos)[3] Número de ID: S = Página de estado
Ayuda para la navega-ción
Si hay disponibles otros detalles o más informaciones sobre la indicación, en laayuda para la navegación (última línea de la pantalla) aparecen las indicacionesDetalles o Más. En este caso, se pueden visualizar más informaciones con ayudadel pulsador .
Figura 13: Ayuda para la navegación (abajo)
[1] muestra una lista de señales detalladas[2] muestra más informaciones
La ayuda para la navegación (última línea) se oculta transcurridos aprox. 3 segundos.Para visualizar de nuevo la ayuda para la navegación (con el selector en posición0 (OFF) ) se debe presionar cualquier pulsador.
4.2.1. Señales de actuador y válvula
Las indicaciones en pantalla dependen del equipamiento del actuador.
Posición de la válvula (S0001)
Esta indicación tiene sólo lugar si hay montado un transmisor de posición(potenciómetro, EWG, RWG o MWG) en el actuador.
● La indicación S0001 muestra la posición de la válvula en % de la carrera.● Tras aprox. 3 segundos aparece la indicación de barras.● Cuando se emite una orden de maniobra, una flecha indica el sentido de ma-
niobra (ABRIR/CERRAR).
Figura 14: Posición de la válvula e indicación del sentido de maniobra
Cuando se alcanzan las posiciones finales ajustadas, esto se indica adicionalmentecon los símbolos (CERRADO) y (ABIERTO).
20
Control de actuadorIndicadores AC 01.2/ACExC 01.2
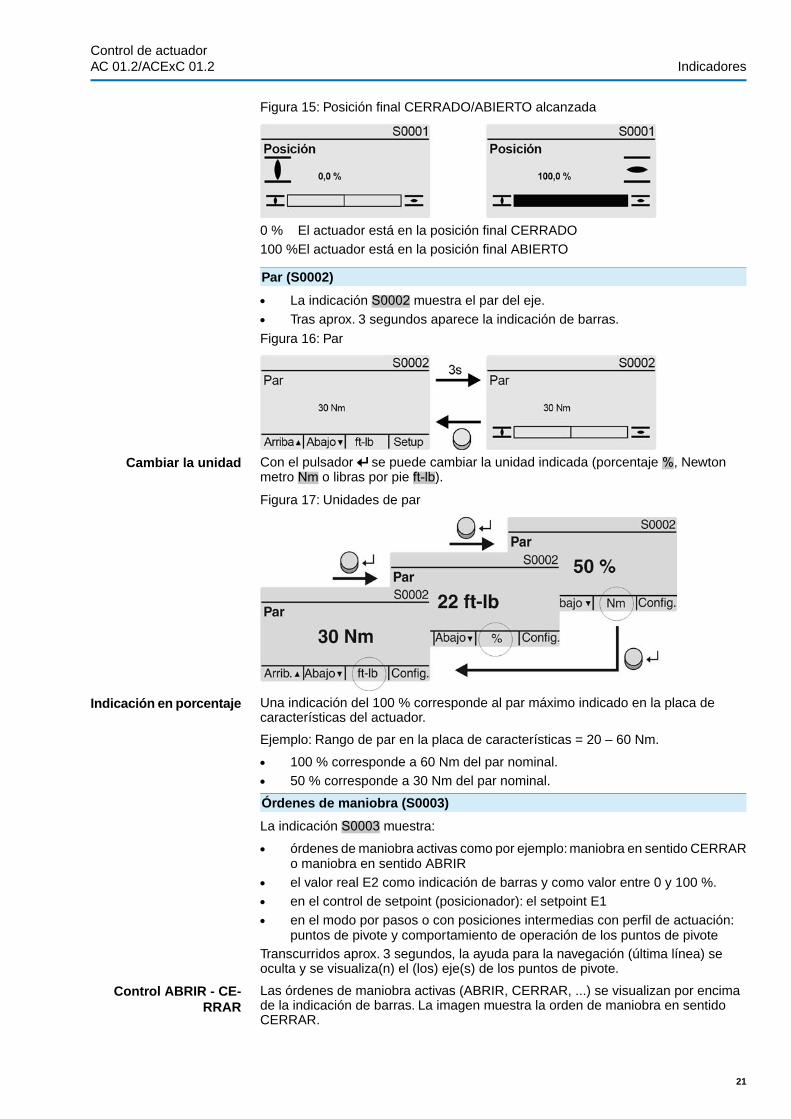
Figura 15: Posición final CERRADO/ABIERTO alcanzada
0 % El actuador está en la posición final CERRADO100 %El actuador está en la posición final ABIERTO
Par (S0002)
● La indicación S0002 muestra el par del eje.● Tras aprox. 3 segundos aparece la indicación de barras.
Figura 16: Par
Cambiar la unidad Con el pulsador se puede cambiar la unidad indicada (porcentaje %, Newtonmetro Nm o libras por pie ft-lb).
Figura 17: Unidades de par
Indicación en porcentaje Una indicación del 100 % corresponde al par máximo indicado en la placa decaracterísticas del actuador.
Ejemplo: Rango de par en la placa de características = 20 – 60 Nm.
● 100 % corresponde a 60 Nm del par nominal.● 50 % corresponde a 30 Nm del par nominal.
Órdenes de maniobra (S0003)
La indicación S0003 muestra:
● órdenes de maniobra activas como por ejemplo: maniobra en sentido CERRARo maniobra en sentido ABRIR
● el valor real E2 como indicación de barras y como valor entre 0 y 100 %.● en el control de setpoint (posicionador): el setpoint E1● en el modo por pasos o con posiciones intermedias con perfil de actuación:
puntos de pivote y comportamiento de operación de los puntos de pivoteTranscurridos aprox. 3 segundos, la ayuda para la navegación (última línea) seoculta y se visualiza(n) el (los) eje(s) de los puntos de pivote.
Control ABRIR - CE-RRAR
Las órdenes de maniobra activas (ABRIR, CERRAR, ...) se visualizan por encimade la indicación de barras. La imagen muestra la orden de maniobra en sentidoCERRAR.
21
Control de actuadorAC 01.2/ACExC 01.2 Indicadores
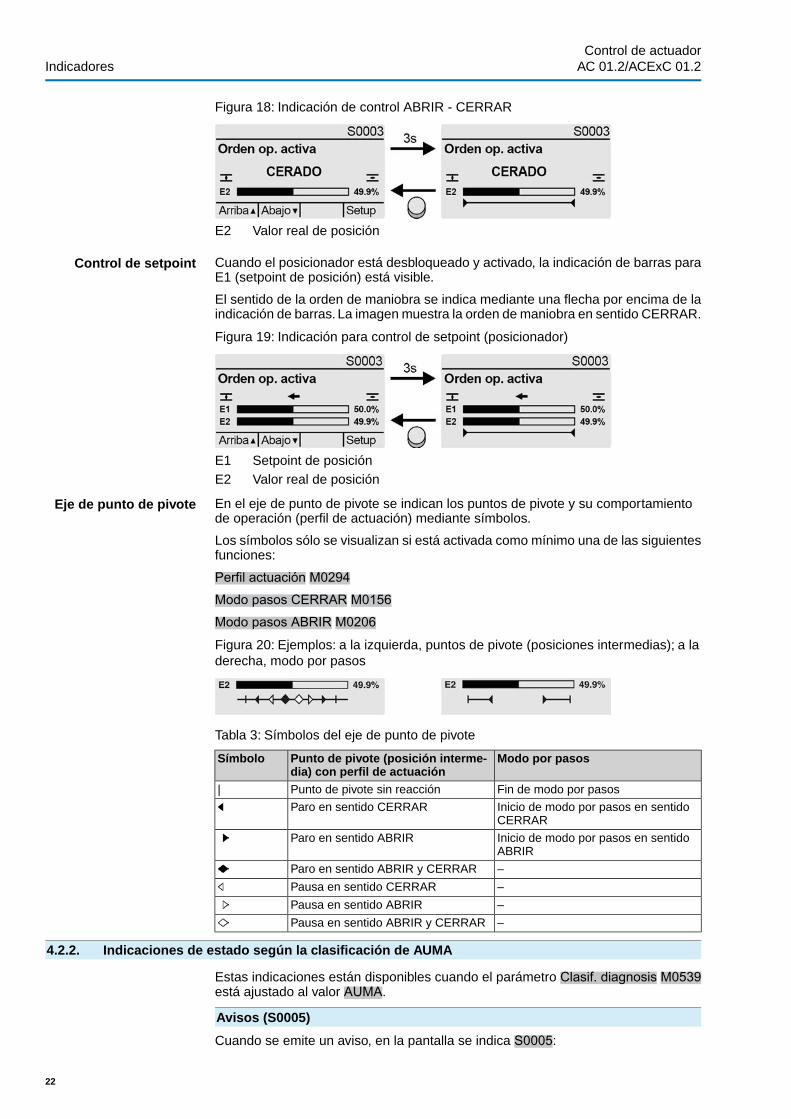
Figura 18: Indicación de control ABRIR - CERRAR
E2 Valor real de posición
Control de setpoint Cuando el posicionador está desbloqueado y activado, la indicación de barras paraE1 (setpoint de posición) está visible.
El sentido de la orden de maniobra se indica mediante una flecha por encima de laindicación de barras. La imagen muestra la orden de maniobra en sentido CERRAR.
Figura 19: Indicación para control de setpoint (posicionador)
E1 Setpoint de posiciónE2 Valor real de posición
Eje de punto de pivote En el eje de punto de pivote se indican los puntos de pivote y su comportamientode operación (perfil de actuación) mediante símbolos.
Los símbolos sólo se visualizan si está activada como mínimo una de las siguientesfunciones:
Perfil actuación M0294Modo pasos CERRAR M0156Modo pasos ABRIR M0206Figura 20: Ejemplos: a la izquierda, puntos de pivote (posiciones intermedias); a laderecha, modo por pasos
Tabla 3: Símbolos del eje de punto de pivote
Modo por pasosPunto de pivote (posición interme-dia) con perfil de actuación
Símbolo
Fin de modo por pasosPunto de pivote sin reacción|
Inicio de modo por pasos en sentidoCERRAR
Paro en sentido CERRAR
Inicio de modo por pasos en sentidoABRIR
Paro en sentido ABRIR
–Paro en sentido ABRIR y CERRAR
–Pausa en sentido CERRAR
–Pausa en sentido ABRIR
–Pausa en sentido ABRIR y CERRAR
4.2.2. Indicaciones de estado según la clasificación de AUMA
Estas indicaciones están disponibles cuando el parámetro Clasif. diagnosis M0539está ajustado al valor AUMA.
Avisos (S0005)
Cuando se emite un aviso, en la pantalla se indica S0005:
22
Control de actuadorIndicadores AC 01.2/ACExC 01.2
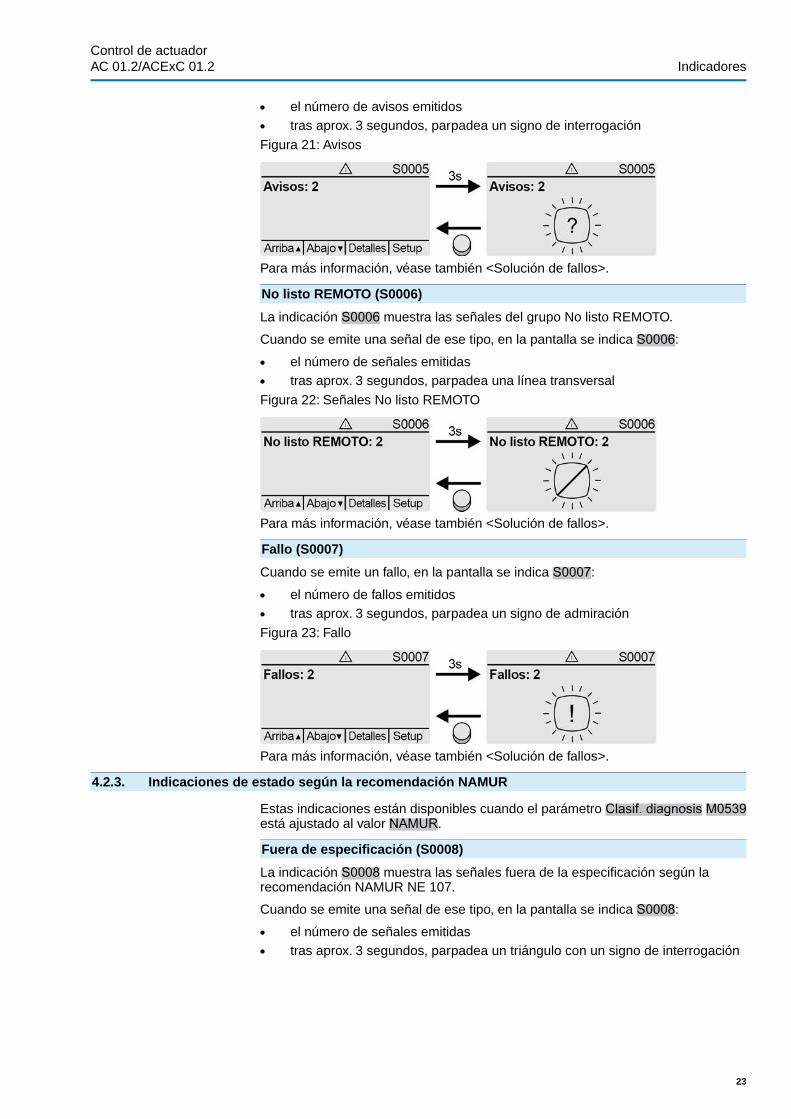
● el número de avisos emitidos● tras aprox. 3 segundos, parpadea un signo de interrogación
Figura 21: Avisos
Para más información, véase también <Solución de fallos>.
No listo REMOTO (S0006)
La indicación S0006 muestra las señales del grupo No listo REMOTO.
Cuando se emite una señal de ese tipo, en la pantalla se indica S0006:
● el número de señales emitidas● tras aprox. 3 segundos, parpadea una línea transversal
Figura 22: Señales No listo REMOTO
Para más información, véase también <Solución de fallos>.
Fallo (S0007)
Cuando se emite un fallo, en la pantalla se indica S0007:
● el número de fallos emitidos● tras aprox. 3 segundos, parpadea un signo de admiración
Figura 23: Fallo
Para más información, véase también <Solución de fallos>.
4.2.3. Indicaciones de estado según la recomendación NAMUR
Estas indicaciones están disponibles cuando el parámetro Clasif. diagnosis M0539está ajustado al valor NAMUR.
Fuera de especificación (S0008)
La indicación S0008 muestra las señales fuera de la especificación según larecomendación NAMUR NE 107.
Cuando se emite una señal de ese tipo, en la pantalla se indica S0008:
● el número de señales emitidas● tras aprox. 3 segundos, parpadea un triángulo con un signo de interrogación
23
Control de actuadorAC 01.2/ACExC 01.2 Indicadores
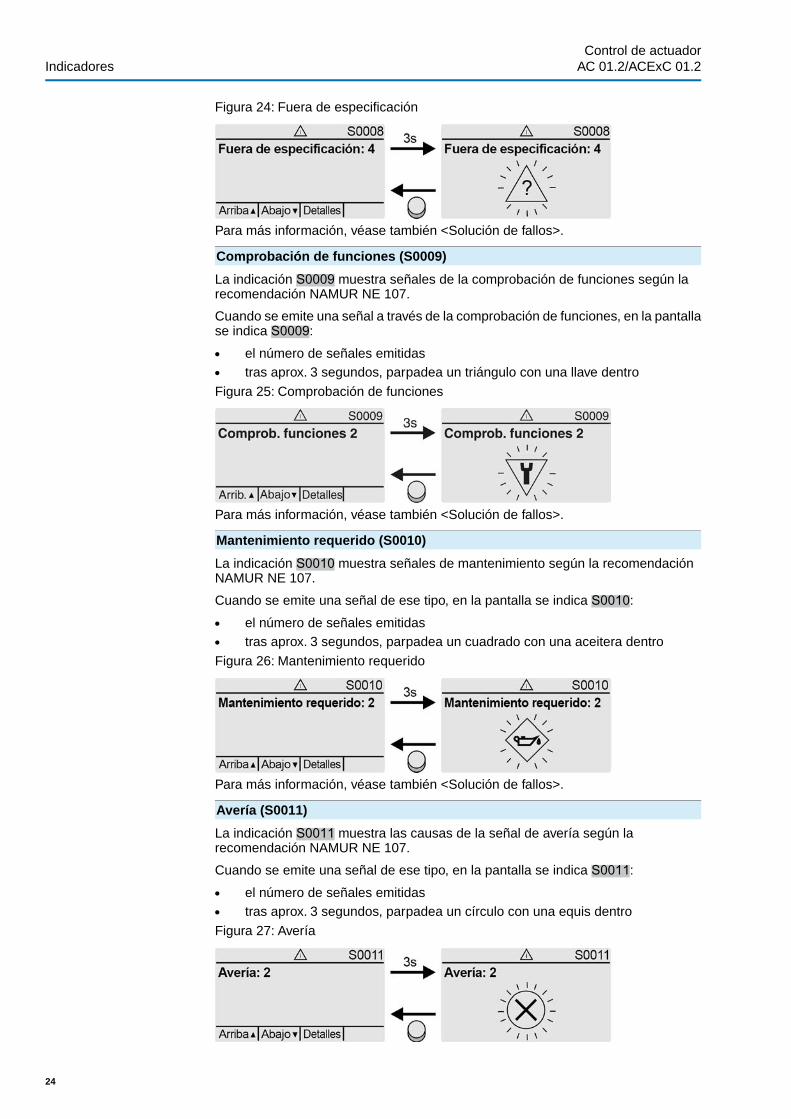
Figura 24: Fuera de especificación
Para más información, véase también <Solución de fallos>.
Comprobación de funciones (S0009)
La indicación S0009 muestra señales de la comprobación de funciones según larecomendación NAMUR NE 107.
Cuando se emite una señal a través de la comprobación de funciones, en la pantallase indica S0009:
● el número de señales emitidas● tras aprox. 3 segundos, parpadea un triángulo con una llave dentro
Figura 25: Comprobación de funciones
Para más información, véase también <Solución de fallos>.
Mantenimiento requerido (S0010)
La indicación S0010 muestra señales de mantenimiento según la recomendaciónNAMUR NE 107.
Cuando se emite una señal de ese tipo, en la pantalla se indica S0010:
● el número de señales emitidas● tras aprox. 3 segundos, parpadea un cuadrado con una aceitera dentro
Figura 26: Mantenimiento requerido
Para más información, véase también <Solución de fallos>.
Avería (S0011)
La indicación S0011 muestra las causas de la señal de avería según larecomendación NAMUR NE 107.
Cuando se emite una señal de ese tipo, en la pantalla se indica S0011:
● el número de señales emitidas● tras aprox. 3 segundos, parpadea un círculo con una equis dentro
Figura 27: Avería
24
Control de actuadorIndicadores AC 01.2/ACExC 01.2
Para más información, véase también <Solución de fallos>.
4.3. Lámparas indicadoras en los mandos locales
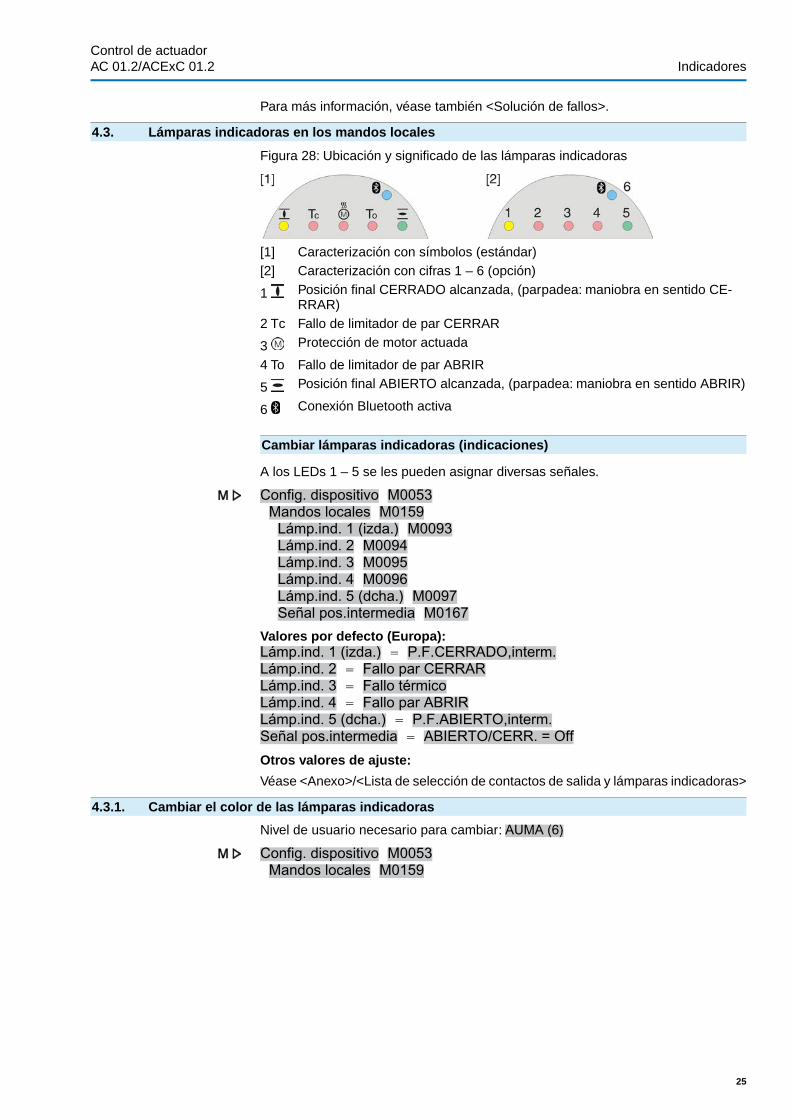
Figura 28: Ubicación y significado de las lámparas indicadoras
[1] Caracterización con símbolos (estándar)[2] Caracterización con cifras 1 – 6 (opción)
1 Posición final CERRADO alcanzada, (parpadea: maniobra en sentido CE-RRAR)
2 Tc Fallo de limitador de par CERRAR
3 Protección de motor actuada
4 To Fallo de limitador de par ABRIR
5 Posición final ABIERTO alcanzada, (parpadea: maniobra en sentido ABRIR)
6 Conexión Bluetooth activa
Cambiar lámparas indicadoras (indicaciones)
A los LEDs 1 – 5 se les pueden asignar diversas señales.
Config. dispositivo M0053Mandos locales M0159Lámp.ind. 1 (izda.) M0093Lámp.ind. 2 M0094Lámp.ind. 3 M0095Lámp.ind. 4 M0096Lámp.ind. 5 (dcha.) M0097Señal pos.intermedia M0167
Valores por defecto (Europa):Lámp.ind. 1 (izda.) = P.F.CERRADO,interm.Lámp.ind. 2 = Fallo par CERRARLámp.ind. 3 = Fallo térmicoLámp.ind. 4 = Fallo par ABRIRLámp.ind. 5 (dcha.) = P.F.ABIERTO,interm.Señal pos.intermedia = ABIERTO/CERR. = OffOtros valores de ajuste:
Véase <Anexo>/<Lista de selección de contactos de salida y lámparas indicadoras>
4.3.1. Cambiar el color de las lámparas indicadoras
Nivel de usuario necesario para cambiar: AUMA (6)
Config. dispositivo M0053Mandos locales M0159
25
Control de actuadorAC 01.2/ACExC 01.2 Indicadores
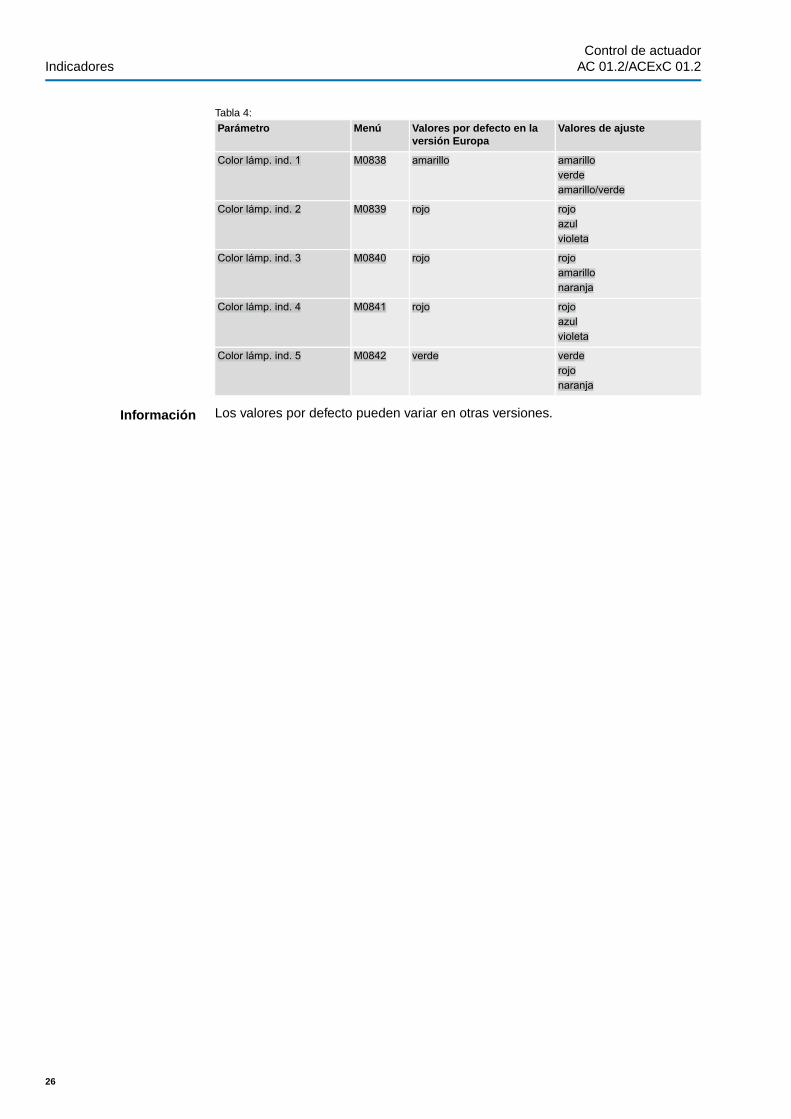
Tabla 4:Valores de ajusteValores por defecto en la
versión EuropaMenúParámetro
amarilloverdeamarillo/verde
amarilloM0838Color lámp. ind. 1
rojoazulvioleta
rojoM0839Color lámp. ind. 2
rojoamarillonaranja
rojoM0840Color lámp. ind. 3
rojoazulvioleta
rojoM0841Color lámp. ind. 4
verderojonaranja
verdeM0842Color lámp. ind. 5
Información Los valores por defecto pueden variar en otras versiones.
26
Control de actuadorIndicadores AC 01.2/ACExC 01.2
5. Señales (señales de salida)
5.1. Señales de estado mediante contactos de salida (salidas digitales)
Propiedades Mediante los contactos de salida se pueden emitir señales de estado (p. ej., cuandose alcanza la posición final, la posición del selector, averías, ...) como señalesbinarias al puesto de mando.
Las señales de estado sólo tienen dos estados: activo o no activo. Activo quieredecir que se cumplen las condiciones para la señal.
5.1.1. Configuración de las salidas
Los contactos de salida (salidas DOUT 1 – 12) se pueden configurar con diversasseñales.
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Interface I/O M0139Salidas digitales M0110Señal DOUT 1 M0109
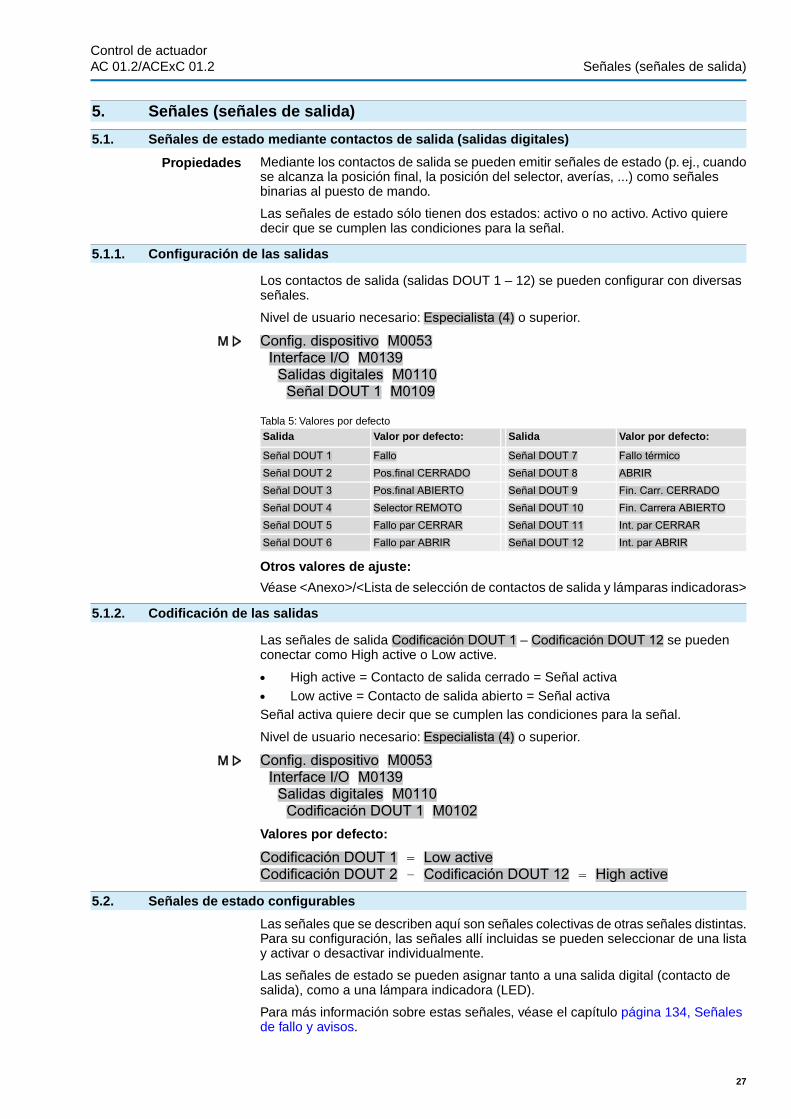
Tabla 5: Valores por defectoValor por defecto:SalidaValor por defecto:Salida
Fallo térmicoSeñal DOUT 7FalloSeñal DOUT 1ABRIRSeñal DOUT 8Pos.final CERRADOSeñal DOUT 2Fin. Carr. CERRADOSeñal DOUT 9Pos.final ABIERTOSeñal DOUT 3Fin. Carrera ABIERTOSeñal DOUT 10Selector REMOTOSeñal DOUT 4Int. par CERRARSeñal DOUT 11Fallo par CERRARSeñal DOUT 5Int. par ABRIRSeñal DOUT 12Fallo par ABRIRSeñal DOUT 6
Otros valores de ajuste:
Véase <Anexo>/<Lista de selección de contactos de salida y lámparas indicadoras>
5.1.2. Codificación de las salidas
Las señales de salida Codificación DOUT 1 – Codificación DOUT 12 se puedenconectar como High active o Low active.
● High active = Contacto de salida cerrado = Señal activa● Low active = Contacto de salida abierto = Señal activaSeñal activa quiere decir que se cumplen las condiciones para la señal.
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Interface I/O M0139Salidas digitales M0110Codificación DOUT 1 M0102
Valores por defecto:
Codificación DOUT 1 = Low activeCodificación DOUT 2 – Codificación DOUT 12 = High active
5.2. Señales de estado configurables
Las señales que se describen aquí son señales colectivas de otras señales distintas.Para su configuración, las señales allí incluidas se pueden seleccionar de una listay activar o desactivar individualmente.
Las señales de estado se pueden asignar tanto a una salida digital (contacto desalida), como a una lámpara indicadora (LED).
Para más información sobre estas señales, véase el capítulo página 134, Señalesde fallo y avisos.
27
Control de actuadorAC 01.2/ACExC 01.2 Señales (señales de salida)
Configurar señales de estado
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Conf. de señales M0860Avería (configurable) M0879Fallo (Cfg) M0880Advertencias (Cfg) M0881No listo REMOTO (Cfg) M0882
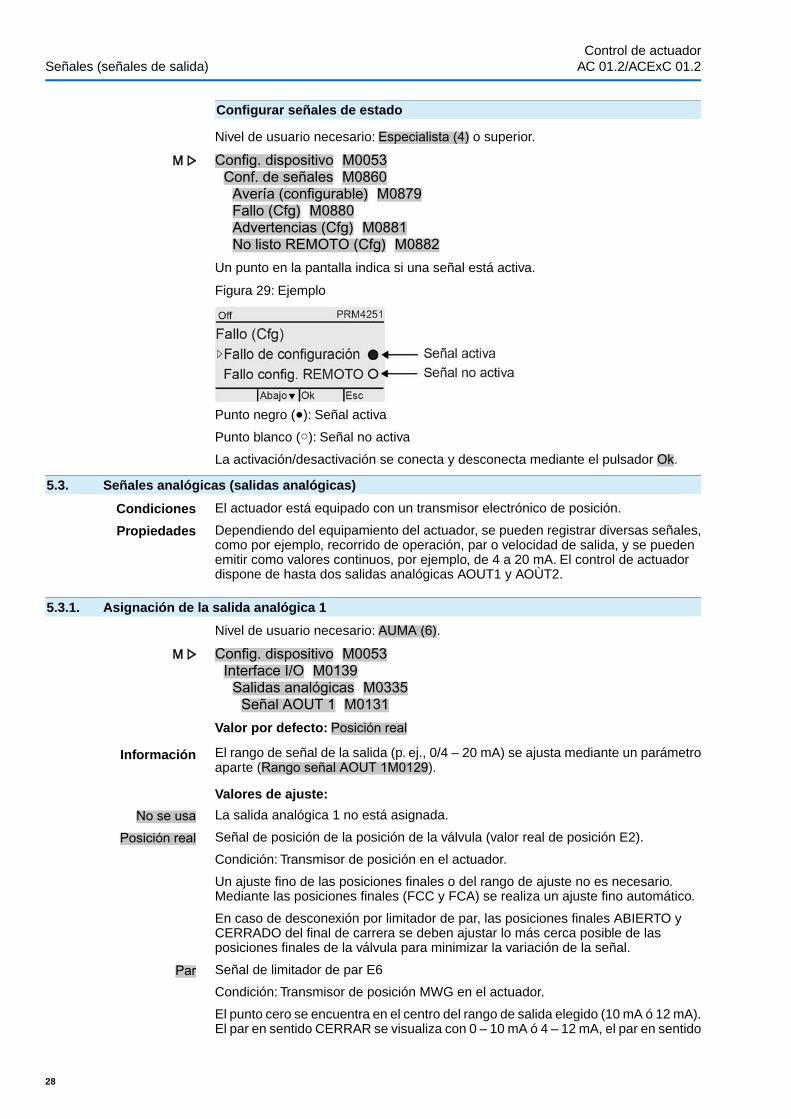
Un punto en la pantalla indica si una señal está activa.
Figura 29: Ejemplo
Punto negro (●): Señal activa
Punto blanco (○): Señal no activa
La activación/desactivación se conecta y desconecta mediante el pulsador Ok.
5.3. Señales analógicas (salidas analógicas)
Condiciones El actuador está equipado con un transmisor electrónico de posición.
Propiedades Dependiendo del equipamiento del actuador, se pueden registrar diversas señales,como por ejemplo, recorrido de operación, par o velocidad de salida, y se puedenemitir como valores continuos, por ejemplo, de 4 a 20 mA. El control de actuadordispone de hasta dos salidas analógicas AOUT1 y AOÙT2.
5.3.1. Asignación de la salida analógica 1
Nivel de usuario necesario: AUMA (6).
Config. dispositivo M0053Interface I/O M0139Salidas analógicas M0335Señal AOUT 1 M0131
Valor por defecto: Posición real
Información El rango de señal de la salida (p. ej., 0/4 – 20 mA) se ajusta mediante un parámetroaparte (Rango señal AOUT 1M0129).
Valores de ajuste:
No se usa La salida analógica 1 no está asignada.
Posición real Señal de posición de la posición de la válvula (valor real de posición E2).
Condición: Transmisor de posición en el actuador.
Un ajuste fino de las posiciones finales o del rango de ajuste no es necesario.Mediante las posiciones finales (FCC y FCA) se realiza un ajuste fino automático.
En caso de desconexión por limitador de par, las posiciones finales ABIERTO yCERRADO del final de carrera se deben ajustar lo más cerca posible de lasposiciones finales de la válvula para minimizar la variación de la señal.
Par Señal de limitador de par E6
Condición: Transmisor de posición MWG en el actuador.
El punto cero se encuentra en el centro del rango de salida elegido (10 mA ó 12 mA).El par en sentido CERRAR se visualiza con 0 – 10 mA ó 4 – 12 mA, el par en sentido
28
Control de actuadorSeñales (señales de salida) AC 01.2/ACExC 01.2
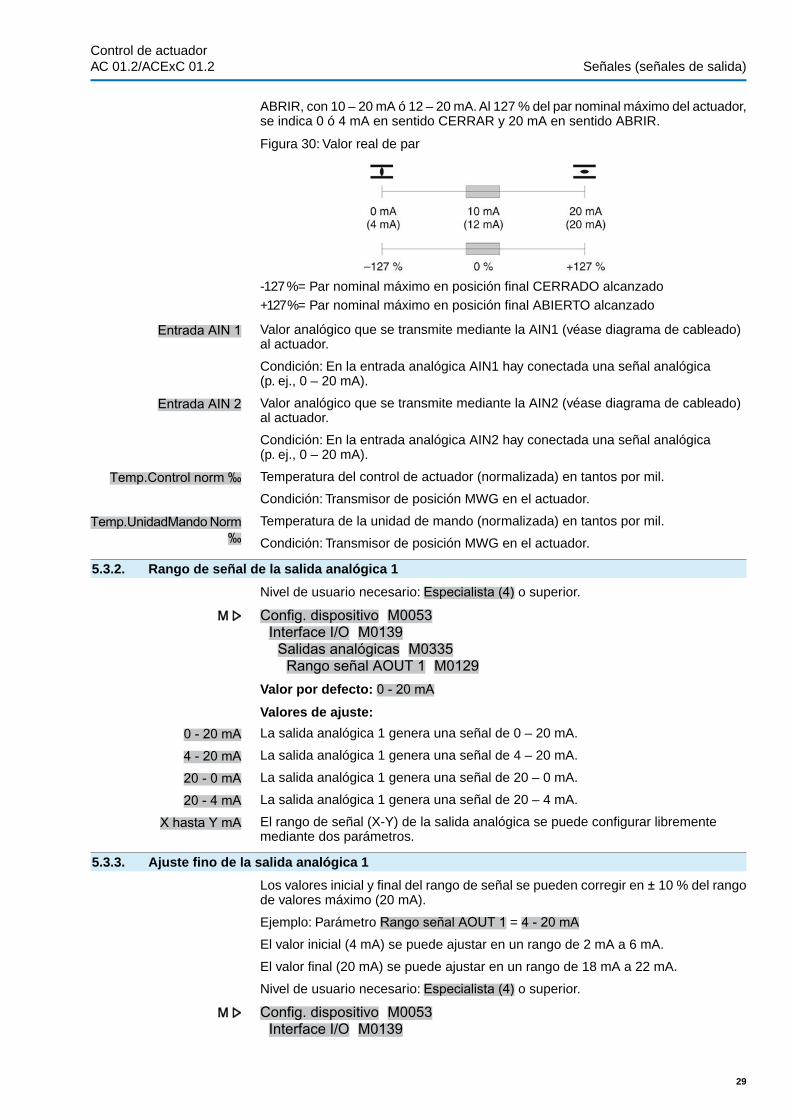
ABRIR, con 10 – 20 mA ó 12 – 20 mA. Al 127 % del par nominal máximo del actuador,se indica 0 ó 4 mA en sentido CERRAR y 20 mA en sentido ABRIR.
Figura 30: Valor real de par
-127 %= Par nominal máximo en posición final CERRADO alcanzado+127 %= Par nominal máximo en posición final ABIERTO alcanzado
Entrada AIN 1 Valor analógico que se transmite mediante la AIN1 (véase diagrama de cableado)al actuador.
Condición: En la entrada analógica AIN1 hay conectada una señal analógica(p. ej., 0 – 20 mA).
Entrada AIN 2 Valor analógico que se transmite mediante la AIN2 (véase diagrama de cableado)al actuador.
Condición: En la entrada analógica AIN2 hay conectada una señal analógica(p. ej., 0 – 20 mA).
Temp.Control norm ‰ Temperatura del control de actuador (normalizada) en tantos por mil.
Condición: Transmisor de posición MWG en el actuador.
Temp.UnidadMandoNorm‰
Temperatura de la unidad de mando (normalizada) en tantos por mil.
Condición: Transmisor de posición MWG en el actuador.
5.3.2. Rango de señal de la salida analógica 1
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Interface I/O M0139Salidas analógicas M0335Rango señal AOUT 1 M0129
Valor por defecto: 0 - 20 mAValores de ajuste:
0 - 20 mA La salida analógica 1 genera una señal de 0 – 20 mA.
4 - 20 mA La salida analógica 1 genera una señal de 4 – 20 mA.
20 - 0 mA La salida analógica 1 genera una señal de 20 – 0 mA.
20 - 4 mA La salida analógica 1 genera una señal de 20 – 4 mA.
X hasta Y mA El rango de señal (X-Y) de la salida analógica se puede configurar librementemediante dos parámetros.
5.3.3. Ajuste fino de la salida analógica 1
Los valores inicial y final del rango de señal se pueden corregir en ± 10 % del rangode valores máximo (20 mA).
Ejemplo: Parámetro Rango señal AOUT 1 = 4 - 20 mAEl valor inicial (4 mA) se puede ajustar en un rango de 2 mA a 6 mA.
El valor final (20 mA) se puede ajustar en un rango de 18 mA a 22 mA.
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Interface I/O M0139
29
Control de actuadorAC 01.2/ACExC 01.2 Señales (señales de salida)
Salidas analógicas M0335Ajuste fino AOUT 1 M05440/4 mA (valor inicial) M014020 mA (valor final) M0210
Valores por defecto: 0Rangos de ajuste: -10,0 ... 10,0 % (en %)
5.3.4. Asignación de la salida analógica 2
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Interface I/O M0139Salidas analógicas M0335Señal AOUT 2 M0132
Valor por defecto: ParValores de ajuste:
Descripción, véase <Asignación de la salida analógica 1>.
5.3.5. Rango de señal de la salida analógica 2
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Interface I/O M0139Salidas analógicas M0335Rango señal AOUT 2 M0130
Valor por defecto: 0 - 20 mAValores de ajuste:
0 - 20 mA La salida analógica 2 genera una señal de 0 – 20 mA.
4 - 20 mA La salida analógica 2 genera una señal de 4 – 20 mA.
20 - 0 mA La salida analógica 2 genera una señal de 20 – 0 mA.
20 - 4 mA La salida analógica 2 genera una señal de 20 – 4 mA.
X hasta Y mA El rango de señal (X-Y) de la salida analógica se puede configurar librementemediante dos parámetros.
5.3.6. Ajuste fino de la salida analógica 2
Los valores inicial y final del rango de señal se pueden corregir en ± 10 % del rangode valores máximo (20 mA).
Ejemplo: Parámetro Rango señal AOUT 1 = 4 - 20 mAEl valor inicial (4 mA) se puede ajustar en un rango de 2 mA a 6 mA.
El valor final (20 mA) se puede ajustar en un rango de 18 mA a 22 mA.
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Interface I/O M0139Salidas analógicas M0335Ajuste fino AOUT 2 M05450/4 mA (valor inicial) M014120 mA (final value) M0211
Valores por defecto: 0Rangos de ajuste: -10,0 ... 10,0 % (en %)
30
Control de actuadorSeñales (señales de salida) AC 01.2/ACExC 01.2
6. FuncionamientoExisten distintos modos (estados) de operación. El modo de operación actual seindica en la primera línea de la pantalla:
Figura 31: Ejemplo: Modo de operación Off
Este capítulo describe las propiedades de los distintos modos de operación; lasfunciones vinculadas a ellos se describen en capítulos aparte.
6.1. Modo de operación Off
El selector está en posición 0 (OFF).
Propiedades ● La primera línea de la pantalla indica: Off● No es posible la operación eléctrica (tampoco la operación de EMERGENCIA).● El control aún puede emitir señales (la tensión de alimentación del control se
mantiene).● Los pulsadores C se pueden utilizar para manejar el menú mediante la
pantalla.
6.2. Modo de operación Local
El selector está en posición Operación local (LOCAL).
Propiedades ● La primera línea de la pantalla indica: Local● El actuador se puede controlar localmente con los pulsadores (ABRIR),
PARO, (CERRAR) en la operación motorizada.● Los fallos y los avisos sin Reset automático se pueden confirmar con el pulsador
RESET.
6.2.1. Contacto mantenido o Auto-retención Local
El parámetro Auto-retenc. LOCAL M0076 determina el comportamiento operativodel actuador con las órdenes de maniobra emitidas mediante los pulsadores locales.
Ajustes del cliente M0041Mandos locales M0075Auto-retenc. LOCAL M0075
Valor por defecto: ABRIR y CERRARValores de ajuste:
OFF (mantenido) Contacto mantenido on, auto-retención off
El actuador maniobra en sentido ABRIR o CERRAR sólo mientras exista una ordende maniobra. Si la orden de maniobra se cancela, el actuador se para.
ABRIR En sentido ABRIR = Auto-retención (en sentido CERRAR, contacto mantenido):
Tras una orden de maniobra en sentido ABRIR, el actuador sigue maniobrandoaunque la orden de maniobra se cancele (auto-retención). El actuador se paramediante la orden PARO o cuando se alcanza la posición final ABIERTO o unaposición intermedia en sentido ABRIR.
31
Control de actuadorAC 01.2/ACExC 01.2 Funcionamiento
CERRAR En sentido CERRAR = Auto-retención (en sentido ABRIR, contacto mantenido):
Tras una orden de maniobra en sentido CERRAR, el actuador sigue maniobrandoaunque la orden de maniobra se cancele (auto-retención). El actuador se paramediante la orden PARO o cuando se alcanza la posición final CERRADO o unaposición intermedia en sentido CERRAR.
ABRIR y CERRAR En sentido ABRIR y CERRAR = Auto-retención:
Tras una orden de maniobra, el actuador sigue maniobrando en sentido ABRIR oCERRAR aunque la orden de maniobra se cancele (auto-retención). El actuador separa o bien con la orden PARO, o bien cuando se alcanza una posición final o unaintermedia.
La inversión directa del sentido de maniobra no es posible. Una orden de maniobraen un sentido ABRIR o CERRAR se debe detener primero con la orden PARO. Sólodespués es posible la orden de maniobra en el sentido opuesto.
A & C sin PARO En sentido ABRIR y CERRAR = Auto-retención sin paro:
La inversión directa del sentido de maniobra es posible también sin la orden PARO.Sin embargo, la maniobra se puede detener en cualquier momento con la ordenPARO.
6.3. Modo de operación Remoto
El selector está en posición Operación remota (REMOTO).
Propiedades La primera línea de la pantalla indica la fuente ajustada para las órdenes de maniobra:
● Remoto (Interface paralelo)● Remoto II (Interface paralelo, cajetín de manejo)
Dependiendo del tipo de control se distingue entre:
● Control ABRIR - CERRAR (modo de operación Remoto ABRIR - CERRAR):Control mediante órdenes de maniobra binarias ABRIR, PARO, CERRAR.(o con la función de multiport valve activada mediante las órdenes de maniobraCW, CCW)
● Control de setpoint (modo de operación Remoto SETPOINT):Control mediante órdenes de maniobra analógicas, por ejemplo, 4 – 20 mA.
Información ● Las señales binarias (p. ej., +24 V DC) transmitidas a través de entradas digi-tales sólo se reconocen como órdenes de maniobra válidas si la señal llegadurante un mínimo de 10 ms.
● Si hay instalado un posicionador o un controlador de procesos, se puedecambiar entre el control ABRIR - CERRAR (modo de operación Remoto ABRIR- CERRAR) y el control de setpoint (modo de operación Remoto SETPOINT).Véase el capítulo <Cambio entre control ABRIR - CERRAR y control de set-point>.
6.3.1. Contacto mantenido o Auto-retención Remoto
Los parámetros Auto-retenc. REMOTO M0100, Auto-retención M01193 y Auto-ret.REMOTO II M0101 determinan el comportamiento de maniobra del actuador conlas órdenes de maniobra binarias (ABRIR, PARO, CERRAR o CW, CCW), quecontrolan el actuador “desde remoto” mediante el interface I/O.
Ajustes del cliente M0041Interface I/O M0015
Valores por defecto:
Auto-retención = OFF (mantenido)Auto-ret. REMOTO II = ABRIR y CERRAR
32
Control de actuadorFuncionamiento AC 01.2/ACExC 01.2
6.4. Modo de operación EMERGENCIA
Véase también: Función de seguridad <Comportamiento de EMERGENCIA>
Propiedades ● La primera línea de la pantalla indica: EMERGENC.● El modo de operación EMERGENCIA se activa mediante la señal EMERGEN-
CIA.● El actuador ejecuta una acción de EMERGENCIA definida. Por ejemplo, ma-
niobra a una posición de EMERGENCIA predeterminada (p. ej., posición finalABIERTO o posición final CERRADO).
● Mientras la señal EMERGENCIA siga presente, el actuador no reacciona aotras órdenes de maniobra (la señal EMERGENCIA tiene la máxima prioridad).
¡El actuador puede arrancar de inmediato al conectarlo!
Posibilidad de daños personales o daños en la válvula.
→ Asegúrese de que la señal EMERGENCIA está presente al conectar.→ Si el actuador arranca inesperadamente: Ponga el selector en la posición 0
(OFF).
6.5. Modo de operación Paro de EMERGENCIA
Véase también: Función de seguridad <Función Paro de EMERGENCIA>
Condición En la conexión eléctrica o fuera de ella se encuentra un pulsador de Paro deEMERGENCIA (con retención).
Propiedades ● La primera línea de la pantalla indica: Paro EMRG● Con el pulsador de paro de EMERGENCIA se puede interrumpir la alimentación
de corriente al control del motor (contactores o tiristores) en una situación deemergencia.
● El modo de operación Paro de EMERGENCIA tiene prioridad sobre los demásmodos de operación.
● Después de haber activado el pulsador de paro de EMERGENCIA, éste sedebe desbloquear y el modo de operación Paro de EMERGENCIA se debeborrar mediante una orden de Reset antes de que se pueda ejecutar una nuevaorden de maniobra.
● En cuanto el modo de operación Paro de EMERGENCIA se ha cancelado (ordenReset), las órdenes de maniobra analógicas pendientes (p. ej., 0/4 – 20 mA)se ejecutan de nuevo inmediatamente.
6.6. Modo de operación Bloqueado
Véase también: Función de aplicación <Habilitación de los mandos locales>
Propiedades ● La primera línea de la pantalla indica: Deshab.● El manejo mediante los pulsadores de los mandos locales está bloqueado.● El modo de operación Deshab. es posible con el selector en las posiciones
LOCAL y OFF.
Tabla 6: Funciones según la posición del selector:
Función con la indicación = Deshab.Selector en posiciónNo es posible la operación local del actua-dor
Operación local (LOCAL)
No es posible el manejo local del menú0 (OFF)
● El bloqueo o la habilitación se realizan mediante una entrada digital, con laseñal Habilitar LOCAL.
6.7. Modo de operación Servicio
Condiciones Selector = Posición Operación local (LOCAL) u Operación remota (REMOTO).
33
Control de actuadorAC 01.2/ACExC 01.2 Funcionamiento
Indicación en la primera línea: ServicioPropiedades ● La primera línea de la pantalla indica: Servicio
● Para el modo de operación Servicio se necesita un PC u ordenador portátil conel software de servicio AUMA CDT. De este modo, el servicio de AUMA puederealizar ajustes en el control de actuador (p. ej, durante la puesta en servicioo el mantenimiento).
Información Con el selector en posición Operación local (LOCAL) se puede salir del modo deoperación Servicio y activar el modo de operación Local oprimiendo cualquier pulsa-dor.
34
Control de actuadorFuncionamiento AC 01.2/ACExC 01.2
7. Ajustes básicos para la puesta en servicio
Definición Los ajustes básicos de tipo de desconexión, par y final de carrera son necesariospara una puesta en servicio segura del control de actuador con el actuador. Losajustes básicos de visualización, como la fecha y la hora o los formatos devisualización, se pueden cambiar cuando sea necesario.
7.1. Tipo de desconexión para posiciones finales
Función ● Selección del tipo de desconexión (según la especificación del fabricante dela válvula):- Desconexión por final de carrera en la posición final- Desconexión por limitador de par en la posición final
● Para las posiciones finales ABIERTO y CERRADO se puede ajustar por sepa-rado:
Desconexión por final de carrera
El control de actuador desconecta el actuador en las posiciones finales(ABIERTO/CERRADO) ajustadas mediante el final de carrera.
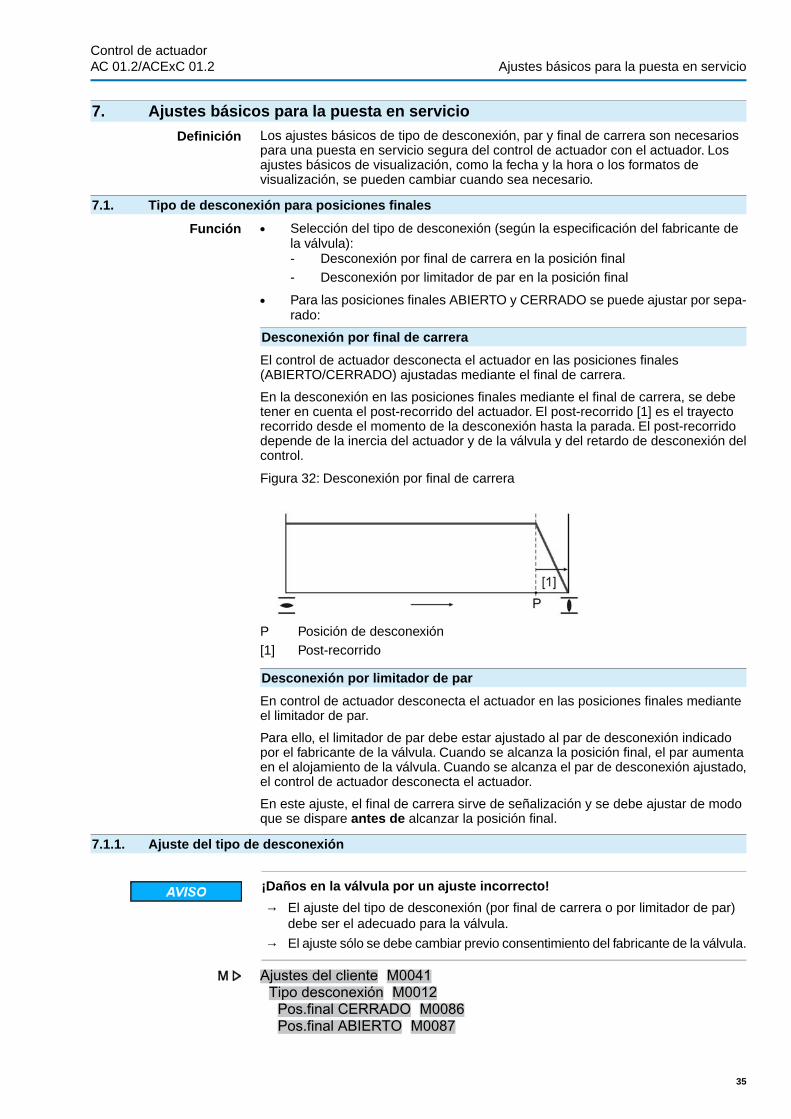
En la desconexión en las posiciones finales mediante el final de carrera, se debetener en cuenta el post-recorrido del actuador. El post-recorrido [1] es el trayectorecorrido desde el momento de la desconexión hasta la parada. El post-recorridodepende de la inercia del actuador y de la válvula y del retardo de desconexión delcontrol.
Figura 32: Desconexión por final de carrera
P Posición de desconexión[1] Post-recorrido
Desconexión por limitador de par
En control de actuador desconecta el actuador en las posiciones finales medianteel limitador de par.
Para ello, el limitador de par debe estar ajustado al par de desconexión indicadopor el fabricante de la válvula. Cuando se alcanza la posición final, el par aumentaen el alojamiento de la válvula. Cuando se alcanza el par de desconexión ajustado,el control de actuador desconecta el actuador.
En este ajuste, el final de carrera sirve de señalización y se debe ajustar de modoque se dispare antes de alcanzar la posición final.
7.1.1. Ajuste del tipo de desconexión
¡Daños en la válvula por un ajuste incorrecto!
→ El ajuste del tipo de desconexión (por final de carrera o por limitador de par)debe ser el adecuado para la válvula.
→ El ajuste sólo se debe cambiar previo consentimiento del fabricante de la válvula.
Ajustes del cliente M0041Tipo desconexión M0012Pos.final CERRADO M0086Pos.final ABIERTO M0087
35
Control de actuadorAC 01.2/ACExC 01.2 Ajustes básicos para la puesta en servicio
Valor por defecto: CarreraValores de ajuste:
Carrera Desconexión en las posiciones finales mediante finales de carrera.
Par Desconexión en las posiciones finales mediante limitadores de par.
Seleccionar el menúprincipal
1. Ponga el selector en la posición 0 (OFF).
2. Mantenga presionado el pulsador C Config. durante aprox. 3 segundos.
➥ La indicación cambia al menú principal y muestra: ▶ Pantalla...Seleccionar parámetros 3. Seleccione los parámetros, o bien:
→ mediante el menú haciendo clic hasta el parámetro, o bien→ mediante llamada directa: Pulse e introduzca el ID M0086 o M0087
➥ En la pantalla se visualiza: Pos.final CERRADOCERRAR o ABRIR 4. Seleccione con Arrib. ▲ Abajo ▼:
→ ▶ Pos.final CERRADO→ ▶ Pos.final ABIERTO
➥ El triángulo negro ▶ indica la selección actual.
5. Pulse Ok.
➥ La indicación muestra el siguiente ajuste: Carrera o Par
➥ La última línea de la indicación muestra o bien:
- Editar → continúe con el paso 6, o bien- Guardar → continúe con el paso 106. Pulse Editar.➥ En la pantalla se visualiza: ▶ Especialista (4)
Registrar usuario 7. Seleccione el usuario con Arrib. ▲ Abajo ▼:Información: Nivel de usuario necesario: Especialista (4) o superior.
➥ Los símbolos significan:
- triángulo negro: ▶ = ajuste actual- triángulo blanco: ▷ = selección (aún sin guardar)8. Pulse Ok.
➥ En la pantalla se visualiza: Contraseña 0***9. Introduzca la contraseña (→ Introducir contraseña).
➥ La indicación muestra con un triángulo negro ▶ el tipo de desconexión ajustado(▶Carrera o ▶Par).
Cambiar el ajuste 10. Seleccione el nuevo ajuste con Arrib. ▲ Abajo ▼.
➥ Los símbolos significan:
- triángulo negro: ▶ = ajuste actual- triángulo blanco: ▷ = selección (aún sin guardar)11. Guarde la selección con Guardar.➥ El tipo de desconexión queda ajustado.
12. Volver al paso 4 (CERRAR o ABRIR): pulse Esc.
7.2. Limitadores de par
Condiciones Transmisor magnético de carrera y par (MWG) en el actuador (versión no intrusiva).
36
Control de actuadorAjustes básicos para la puesta en servicio AC 01.2/ACExC 01.2
Si hay limitadores de par en el actuador (versión intrusiva), el ajuste de los limitadoresde par se realiza tal y como se describe en las instrucciones de servicio del actuadorcorrespondiente.
Función ● Protección de sobrecarga de la válvula frente a aumentos de par en todo elrecorrido de operación
● Desconexión en las posiciones finales (con tipo de desconexión por limitadorde par)
● Activación también posible en la operación manual● Visualización o ajuste en porcentaje %, Newton metro Nm o en Pounds per
foot ft-lb
Más información Capítulo <Vigilancia de par>
7.2.1. Ajuste de los limitadores de par
Cuando se alcanza el par de desconexión ajustado aquí, el control desconecta elactuador (protección contra sobrecarga de la válvula).
Información El limitador de par puede activarse también en el modo manual.
¡Daños en la válvula por un ajuste demasiado elevado del par de desconexión!
→ El par de desconexión debe ser adecuado para la válvula.→ El ajuste sólo se debe cambiar previo consentimiento del fabricante de la válvula.
Ajustes del cliente M0041Limitadores de par M0013Par descon. CERRAR M0088Par descon. ABRIR M0089
Valor estándar: el especificado en el pedido
Rango de ajuste: rango de par conforme a la placa de características del actuador
Seleccionar el menúprincipal
1. Ponga el selector en la posición 0 (OFF).
2. Mantenga presionado el pulsador C Config. durante aprox. 3 segundos.
➥ La indicación cambia al menú principal y muestra: ▶ Pantalla...Seleccionar parámetros 3. Seleccione los parámetros, o bien:
→ mediante el menú haciendo clic hasta el parámetro, o bien→ mediante llamada directa: pulse e introduzca la ID M0088
➥ En la pantalla se visualiza: Par descon. CERRARCERRAR o ABRIR 4. Seleccione con Arrib. ▲ Abajo ▼:
→ ▶ Par descon. CERRAR→ ▶ Par descon. ABRIR
➥ El triángulo negro ▶indica la selección actual.
5. Pulse Ok.
➥ Se visualiza el valor ajustado.
➥ La última línea muestra: Editar Esc6. Pulse Editar.➥ En la pantalla se visualiza:
- Especialista (4) → continúe con el paso 7- en la última línea Arrib. ▲ Abajo ▼ Esc → continúe con el paso 11
37
Control de actuadorAC 01.2/ACExC 01.2 Ajustes básicos para la puesta en servicio
Registrar usuario 7. Seleccione el usuario con Arrib. ▲ Abajo ▼:Información: Nivel de usuario necesario: Especialista (4) o superior.
➥ Los símbolos significan:
- triángulo negro: ▶ = ajuste actual- triángulo blanco: ▷ = selección (aún sin guardar)8. Ok .
➥ En la pantalla se visualiza: Contraseña 0***9. Introduzca la contraseña (→ Introducir contraseña).
➥ Se visualiza el valor ajustado.
➥ La última línea muestra: Editar Esc10. Pulse Editar.
Cambiar el valor 11. Con Arrib. ▲ Abajo ▼ introduzca el nuevo valor para el par de desconexión.Información: El rango de par ajustable se muestra entre paréntesis.
12. Guarde el nuevo valor con Guardar.➥ El par de desconexión queda ajustado.
13. Volver al paso 4 (CERRAR o ABRIR): Pulse Esc.
Información Las siguientes señales de fallo se emiten cuando el par aquí ajustado se alcanzaantes de la posición final:● En la pantalla de los mandos locales: Indicación de estado S0007 Fallo =
Fallo par ABRIR o Fallo par CERRAR
Antes de poder continuar maniobrando, se debe confirmar el fallo: la confirmaciónse puede realizar:
1. Con una orden de maniobra en sentido contrario.- Para Fallo par ABRIR: orden de maniobra en sentido CERRAR- Para Fallo par CERRAR: orden de maniobra en sentido ABRIR
2. O bien, cuando el par actual es menor que el par de desconexión ajustado:- Con el selector en posición Operación local (LOCAL) mediante el pulsador
RESET.- Con el selector en posición Operación remota (REMOTO):
- Mediante una entrada digital (interface I/O) con el comando Reset,si se ha configurado una entrada digital para la señal RESET.
7.3. Final de carrera
Condiciones Unidad de mando electrónica con MWG en el actuador (versión no intrusiva)
Si hay una unidad de mando electromecánica con switches en el actuador (versiónintrusiva), el ajuste del final de carrera se realiza tal y como se describe en lasinstrucciones de servicio.
Funciones ● Desconexión en las posiciones finales (con tipo de desconexión por final decarrera)
● Señalización de las posiciones finales (con tipo de desconexión por limitadorde par)
7.3.1. Ajustar el final de carrera
Si la válvula no se puede maniobrar durante la puesta en servicio, sólo sepuede ajustar una posición final. La otra posición final se debe ajustar mediantela carrera.
→ Véase página 41, Ajustar la posición final mediante la carrera.
38
Control de actuadorAjustes básicos para la puesta en servicio AC 01.2/ACExC 01.2
¡Daños en la válvula/el reductor en caso de un ajuste incorrecto!
→ Durante el ajuste en la operación motorizada: Interrumpa la maniobra a tiempoantes del tope (oprima el pulsador STOP).
→ En la desconexión por final de carrera, tenga en cuenta un margen suficienteentre la posición final y el tope mecánico por motivo de un posible post-recorrido.
Ajustes del cliente M0041Finales de carrera M0010Ajust. P.F.CERRADO? M0084Ajust. P.F.ABIERTO? M0085
Seleccionar el menúprincipal
1. Ponga el selector en la posición 0 (OFF).
2. Mantenga presionado el pulsador C durante aprox. 3 segundos.
➥ La indicación cambia al menú principal y muestra: ▶ Pantalla...Seleccionar parámetros 3. Seleccione los parámetros, o bien:
→ mediante el menú haciendo clic hasta el parámetro, o bien→ mediante llamada directa: Pulse el introduzca el ID M0084
➥ En la pantalla se visualiza: Ajust. P.F.CERRADO?CERRAR o ABRIR 4. Seleccione con Arrib. ▲ Abajo ▼:
→ ▶ Ajust. P.F.CERRADO? M0084→ ▶ Ajust. P.F.ABIERTO? M0085
➥ El triángulo negro ▶ indica la selección actual.
5. Ok .
➥ En la pantalla se visualiza o bien:
- Ajuste P.F. CERRADO? CMD0009 → continúe con el paso 9- Ajuste P.F. ABIERTO? CMD0010 → continúe con el paso 12- Especialista (4) → continúe con el paso 6
Registrar usuario 6. Seleccione el usuario con Arrib. ▲ Abajo ▼:Información: Nivel de usuario necesario: Especialista (4) o superior.
➥ Los símbolos significan:
- triángulo negro: ▶ = ajuste actual- triángulo blanco: ▷ = selección (aún sin guardar)7. Ok Pulse para confirmar el usuario seleccionado.
➥ En la pantalla se visualiza: Contraseña 0***8. Introduzca la contraseña (→ Introducir contraseña).
➥ En la pantalla se visualiza o bien:
- Ajuste P.F. CERRADO? CMD0009 → continúe con el paso 9- Ajuste P.F. ABIERTO? CMD0010 → continúe con el paso 12
39
Control de actuadorAC 01.2/ACExC 01.2 Ajustes básicos para la puesta en servicio
Ajustar la posición finalCERRADO CMD0009
9. Ajustar de nuevo la posición final CERRADO:
9.1 Si la carrera es grande: Ponga el selector en posición de Operación local(LOCAL) y maniobre el actuador en operación motorizada con el pulsador
(CERRADO) en dirección a la posición final.Información: Para evitar deterioros, interrumpa la maniobra a tiempoantes del tope (oprima el pulsador STOP).
9.2 Active la operación manual.
9.3 Gire el volante hasta que la válvula esté cerrada.
9.4 Gire el volante el post-recorrido observado en sentido contrario.
9.5 Ponga el selector en la posición 0 (OFF).
➥ En la pantalla se visualiza: Ajuste P.F. CERRADO? Sí NoConfirmar la nueva posi-
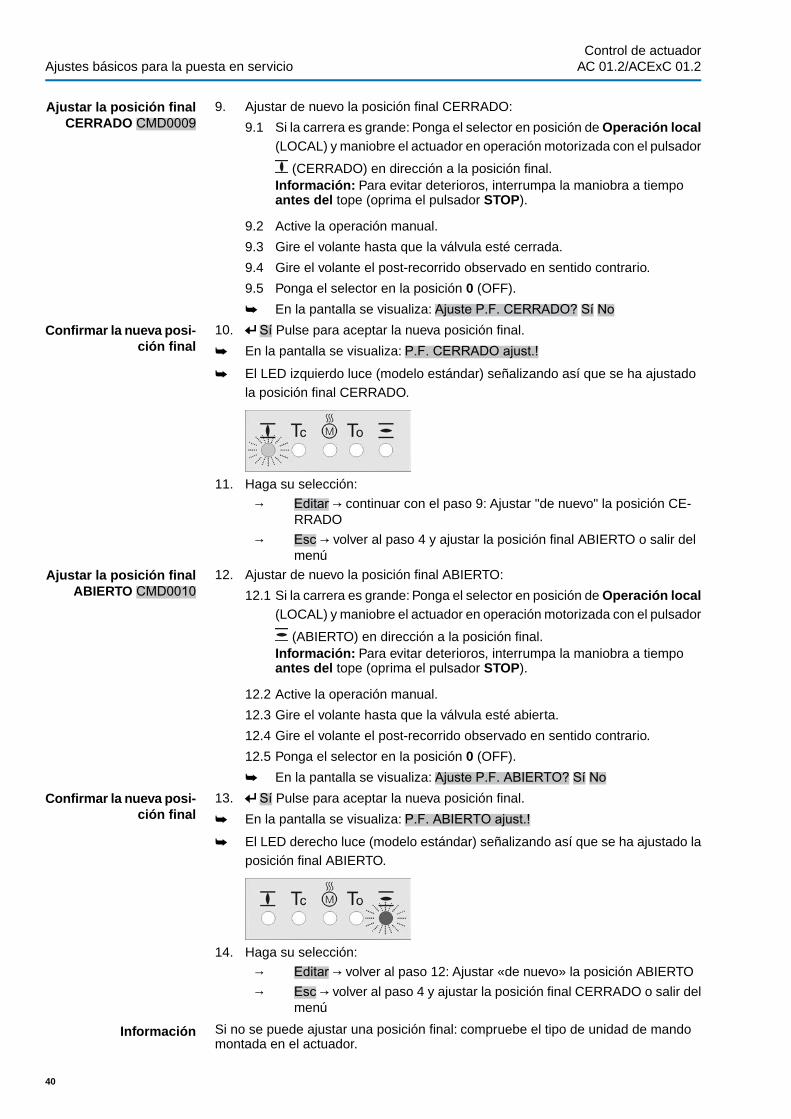
ción final10. Sí Pulse para aceptar la nueva posición final.
➥ En la pantalla se visualiza: P.F. CERRADO ajust.!
➥ El LED izquierdo luce (modelo estándar) señalizando así que se ha ajustadola posición final CERRADO.
11. Haga su selección:→ Editar → continuar con el paso 9: Ajustar "de nuevo" la posición CE-
RRADO→ Esc → volver al paso 4 y ajustar la posición final ABIERTO o salir del
menú
Ajustar la posición finalABIERTO CMD0010
12. Ajustar de nuevo la posición final ABIERTO:
12.1 Si la carrera es grande: Ponga el selector en posición de Operación local(LOCAL) y maniobre el actuador en operación motorizada con el pulsador
(ABIERTO) en dirección a la posición final.Información: Para evitar deterioros, interrumpa la maniobra a tiempoantes del tope (oprima el pulsador STOP).
12.2 Active la operación manual.
12.3 Gire el volante hasta que la válvula esté abierta.
12.4 Gire el volante el post-recorrido observado en sentido contrario.
12.5 Ponga el selector en la posición 0 (OFF).
➥ En la pantalla se visualiza: Ajuste P.F. ABIERTO? Sí NoConfirmar la nueva posi-
ción final13. Sí Pulse para aceptar la nueva posición final.
➥ En la pantalla se visualiza: P.F. ABIERTO ajust.!
➥ El LED derecho luce (modelo estándar) señalizando así que se ha ajustado laposición final ABIERTO.
14. Haga su selección:→ Editar → volver al paso 12: Ajustar «de nuevo» la posición ABIERTO→ Esc → volver al paso 4 y ajustar la posición final CERRADO o salir del
menú
Información Si no se puede ajustar una posición final: compruebe el tipo de unidad de mandomontada en el actuador.
40
Control de actuadorAjustes básicos para la puesta en servicio AC 01.2/ACExC 01.2
7.3.2. Ajustar la posición final mediante la carrera
En los casos de aplicación en los que no es posible maniobrar la válvula du-rante la puesta en servicio, la segunda posición final se puede ajustar mediantela carrera.
→ La base para ello la constituyen los valores incrementales MWG que se repre-sentan en este capítulo.
→ La primera posición final CERRADO o ABIERTO en la que la válvula se encuen-tra durante la puesta en servicio se puede ajustar de la forma habitual medianteel final de carrera. Véase página 38, Ajustar el final de carrera.
¡Daños en la válvula/el reductor en caso de un ajuste incorrecto!
→ Durante el ajuste en la operación motorizada: Interrumpa la maniobra a tiempoantes del tope (oprima el pulsador STOP).
→ En la desconexión por final de carrera, tenga en cuenta un margen suficienteentre la posición final y el tope mecánico por motivo de un posible post-recorrido.
Valores incrementalesMWG
en función del tipo deactuador
El MWG del control de actuador puede representar en función de la generación lassiguientes vueltas:
Generación 1: 512 vueltas con un valor de 16 bits
Generación 2: 544 vueltas con un valor de 16 bits
Información La generación montada en el actuador se puede consultar en el punto «Transmisorde posición» en la hoja de datos del pedido. A esta hoja de datos se puede accederen el sitio web www.auma.com bajo «Service & Support».
Tabla 7: Determinar la generación mediante la hoja de datos del pedidoGeneración MWGValor en la hoja de datos del pedido
130.1
230.2, 30.4, 30.5
En la tabla siguiente se indica el número de valores incrementales por vuelta en lasalida del actuador correspondiente.
Tabla 8: Valores incrementales por vuelta (actuador multivueltas)Valores incrementales por vueltaGeneración 2
Valores incrementales por vueltaGeneración 1
Actuador
118,108125,490SA 07.2 / SA 07.6
120.461128SA 10.2
120,041127.543SA 14.2 / SA 14.6
120.461128SA 16.2
Tabla 9: Valores incrementales por vuelta (actuador de fracción de vuelta)Valores incrementales por 1/4 de vueltaGeneración 2
Valores incrementales por 1/4 de vueltaGeneración 1
Actuador
626.397665.546SQ 05.2
626.397665.546SQ 07.2
801.788851.899SQ 10.2
1603.5751703.798SQ 12.2
3688.2223918.737SQ 14.2
Seguidamente, sólo tiene que multiplicar los valores incrementales por vueltas porla carrera. Después se puede ajustar la posición final mediante la carrera.
Ajustes del cliente M0041Finales de carrera M0010
41
Control de actuadorAC 01.2/ACExC 01.2 Ajustes básicos para la puesta en servicio
Ajust. P.F.CERRADO? M0084Ajust. P.F.ABIERTO? M0085
Seleccionar el menúprincipal
1. Ponga el selector en la posición 0 (OFF).
2. Mantenga presionado el pulsador C durante aprox. 3 segundos.
➥ La indicación cambia al menú principal y muestra: ▶ Pantalla...Seleccionar parámetros 3. Seleccione los parámetros, o bien:
→ mediante el menú haciendo clic hasta el parámetro, o bien→ mediante llamada directa: Pulse el introduzca el ID M0084
➥ En la pantalla se visualiza: Ajust. P.F.CERRADO?CERRAR o ABRIR 4. Seleccione con Arrib. ▲ Abajo ▼:
→ ▶ Ajust. P.F.CERRADO? M0084→ ▶ Ajust. P.F.ABIERTO? M0085
➥ El triángulo negro ▶ indica la selección actual.
5. Ok .
Información Si la posición final CERRADO (o la posición final ABIERTO) se debe ajustar mediantela carrera, primero se debe ajustar la posición final ABIERTO (o la posición finalCERRADO) mediante el final de carrera.Véase página 38, Ajustar el final de carrera.
➥ En la pantalla se visualiza o bien:
- Ajuste P.F. CERRADO? CMD0009 → continúe con el paso 9- Ajuste P.F. ABIERTO? CMD0010 → continúe con el paso 12- Especialista (4) → continúe con el paso 6
Registrar usuario 6. Seleccione el usuario con Arrib. ▲ Abajo ▼:Información: Nivel de usuario necesario: Especialista (4) o superior.
➥ Los símbolos significan:
- triángulo negro: ▶ = ajuste actual- triángulo blanco: ▷ = selección (aún sin guardar)7. Ok Pulse para confirmar el usuario seleccionado.
➥ En la pantalla se visualiza: Contraseña 0***8. Introduzca la contraseña (→ Introducir contraseña).
➥ En la pantalla se visualiza o bien:
- Ajuste P.F. CERRADO? CMD0009 → continúe con el paso 9- Ajuste P.F. ABIERTO? CMD0010 → continúe con el paso 12
Ajustar la posición finalCERRADO mediante la
carrera CMD0009
Información: Si la posición final CERRADO se debe ajustar mediante la carrera,la posición final ABIERTO debe estar ya ajustada mediante el final de carrera.Véase página 38, Ajustar el final de carrera.
9. En la pantalla se visualiza: Ajuste P.F. CERRADO? Carrera Sí No10. Abajo ▼ .
➥ Los valores incrementales para la posición final CERRADO se pueden ajustarahora.
42
Control de actuadorAjustes básicos para la puesta en servicio AC 01.2/ACExC 01.2
11. Ajuste el valor incremental con Arrib. ▲ Abajo ▼ según la tabla al principiodel capítulo.
Como valor incremental no se puede introducir 0 ya que, de otro modo, ambasposiciones finales ajustadas se encontrarían en la misma posición de la vál-vula.
Confirmar el valor incre-mental
12. Guardar Pulse para aceptar la nueva posición final.
➥ En la pantalla se visualiza: P.F. CERRADO ajust.!
➥ El LED izquierdo luce (modelo estándar) señalizando así que se ha ajustadola posición final CERRADO.
13. Haga su selección:→ Editar → volver al paso 9: Ajustar "de nuevo" la posición CERRADO→ Esc → volver al paso 4 y ajustar la posición final ABIERTO o salir del
menú
Ajustar la posición finalABIERTO mediante la
carrera CMD0010
Información: Si la posición final ABIERTO se debe ajustar mediante la carrera,la posición final CERRADO debe estar ya ajustada mediante el final de carrera.Véase página 38, Ajustar el final de carrera.
14. En la pantalla se visualiza: Ajuste P.F. CERRADO? Carrera Sí No15. Abajo ▼ .
➥ Los valores incrementales para la posición final ABIERTO se pueden ajustarahora.
16. Ajuste el valor incremental con Arrib. ▲ Abajo ▼ según la tabla al principiodel capítulo.
Como valor incremental no se puede introducir 0 ya que, de otro modo, ambasposiciones finales ajustadas se encontrarían en la misma posición de la vál-vula.
Confirmar el valor incre-mental
17. Guardar Pulse para aceptar la nueva posición final.
➥ En la pantalla se visualiza: P.F. ABIERTO ajust.!
➥ El LED derecho luce (modelo estándar) señalizando así que se ha ajustado laposición final ABIERTO.
18. Haga su selección:→ Editar → volver al paso 12: Ajustar «de nuevo» la posición ABIERTO→ Esc → volver al paso 4 y ajustar la posición final CERRADO o salir del
menú
Información Si no se puede ajustar una posición final: compruebe el tipo de unidad de mandomontada en el actuador.
7.4. Fecha y hora
Tras la puesta en servicio se deben comprobar y ajustar la fecha y la hora. La fechay la hora son necesarias para la función del protocolo de eventos.
En caso de un fallo de corriente de la red, la fecha y la hora se mantienen guardadas.Sólo se deben comprobar tras periodos prolongados de parada.
43
Control de actuadorAC 01.2/ACExC 01.2 Ajustes básicos para la puesta en servicio
Pantalla... M0009Fecha y hora M0221
Información ● El formato de la fecha, por ejemplo, Día/Mes/año, se puede cambiar medianteel parámetro Formato de fecha M0310 .
● El formato de la hora, por ejemplo, 12/24h, se puede cambiar mediante el pa-rámetro Formato de hora M0050 .
.
7.5. Formatos de visualización
Las indicaciones en pantalla se pueden visualizar en diversos formatos. De estemodo se puede, por ejemplo, tener en consideración los estilos de escrituraespecíficos de los países.
7.5.1. Formato de fecha
La fecha se puede indicar en los formatos Día/Mes/Año o Año/Mes/Día.
Pantalla... M0009Formato de fecha M0310
Valor por defecto: DD.MM.AAAAValores de ajuste:
MM/DD/AAAA Indicación en: Mes/Día/Año, ejemplo: 01/21/2009
DD.MM.AAAA Indicación en: Día/Mes/Año, ejemplo: 21.01.2009
AAAA-MM-DD Indicación en: Año/Mes/Día, ejemplo: 2009-01-21
7.5.2. Formato de hora
La hora se puede indicar en formato de 12 o 24 horas.
Pantalla... M0009Formato de hora M0050
Valor por defecto: 24hValores de ajuste:
12h Indicación de Hora/Minutos/Segundos en formato de 12 horas, ejemplo: 02:25:09PM
24h Indicación de Hora/Minutos/Segundos en formato de 24 horas, ejemplo: 14:25:09
7.5.3. Formato numérico
El formato numérico determina el carácter para la indicación de decimales. Paraseparar entre los números enteros y los fraccionarios, se puede utilizar una comao un punto.
Pantalla... M0009Formato de número M0231
Valores por defecto:
● Con el idioma de pantalla inglés = xx.x● Con los demás idiomas de pantalla = xx,xValores de ajuste:
xx.x Indicación de las cifras decimales con punto, ejemplo: 20.0 mA
xx,x Indicación de las cifras decimales con coma, ejemplo: 20,0 mA
7.5.4. Unidad de par
El par se puede indicar en distintas unidades.
Pantalla... M0009Unidad de par M0051
44
Control de actuadorAjustes básicos para la puesta en servicio AC 01.2/ACExC 01.2
Valor por defecto: NmValores de ajuste:
Nm Indicación en Nm
ft-lb Indicación en Pounds per foot
% Indicación en porcentaje
7.5.5. Unidad de temperatura
La unidad de temperatura se puede indicar en Celsius [C°] o en Fahrenheit [°F].
Pantalla... M0009Unidad temperatura M0052
Valor por defecto: °CRango de ajuste: °C o °F
7.5.6. Unidades de posición
La posición de la válvula (p. ej., posición real, posición de setpoint, ...) u otrasposiciones (p. ej., puntos de pivote) se representan en la pantalla del control deactuador en porcentaje del recorrido de operación (ajuste por defecto). Activandoel parámetro Posición se puede seleccionar otra unidad física para la representaciónde posiciones en lugar de la indicación porcentual. Además también se puedencambiar el escalado y el valor máximo. El cambio tiene efecto en todas lasindicaciones que muestran una posición. Entre ellas se encuentran las páginas deestado S0001 S0003, así como la representación de curvas características (p. ej.,de posición-tiempo) y los histogramas.
Activar unidades de posición
Nivel de usuario necesario: Especialista (4) o superior.
Pantalla... M0009Unidades M1205Posición M1206Posición de activación M1207
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Unidades de posición> desconectada. Las indicaciones de posición en lapantalla (p. ej., la posición de la válvula S0001) se representan en valoresporcentuales.
Función activa Función <Unidades de posición> conectada. Las indicaciones de posición en lapantalla no se representan en valores porcentuales, sino en la unidad de los valoresajustados en el grupo de parámetros Posición.
Ajustar valor máx., escalado y unidad
Nivel de usuario necesario: Especialista (4) o superior.
Pantalla... M0009Unidades M1205Posición M1206Valor máx. al 100,0 % M1208Escalada M1209Unidad M1210
Valores por defecto:Valor máx. al 100,0 % = 1000Escalada = 1Unidad = mARangos/valores de ajuste:Valor máx. al 100,0 % = 1 – 1000
45
Control de actuadorAC 01.2/ACExC 01.2 Ajustes básicos para la puesta en servicio
Escalada = 0.001 – 1000 (Multiplikator für Einheit)Unidad = mA; °C; bar; m³/h; m³/min; m; cm; mm; °
7.5.7. Unidades de magnitud de procesos
Las magnitudes de procesos (p. ej., setpoint de procesos, valor real de procesos ...)se representan en la pantalla del control de actuador como porcentaje del recorridode operación (ajuste por defecto). Activando el parámetro Magnitud de proceso sepuede seleccionar otra unidad física en lugar de la indicación porcentual. El cambiotiene efecto en todas las indicaciones que muestran un valor de procesos.
Activar unidades de magnitud de procesos
Nivel de usuario necesario: Especialista (4) o superior.
Pantalla... M0009Unidades M1205Magnitud de proceso M1211Magnitud proceso activación M1212
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Unidades de magnitud de procesos> desconectada. Las indicaciones deposición en la pantalla se representan en valores porcentuales.
Función activa Función <Unidades de magnitud de procesos> conectada. Las indicaciones deposición en la pantalla no se representan en valores porcentuales, sino en la unidadde los valores ajustados en el grupo de parámetros Magnitud de proceso.
Ajustar valor máx., escalado y unidad
Nivel de usuario necesario: Especialista (4) o superior.
Pantalla... M0009Unidades M1205Magnitud de proceso M1211Valor máx. al 100,0 % M1213Escalada M1214Unidad M1215
Valores por defecto:Valor máx. al 100,0 % = 1000Escalada = 1Unidad = mARangos/valores de ajuste:Valor máx. al 100,0 % = 1 – 1000Escalada = 0.001 – 1000 (multiplicador para unidad)Unidad = mA; °C; bar; m³/h; m³/min; m; cm; mm; °
7.5.8. Unidades de valores de trabajo analógicos (AIN)
Activar las unidades de valores de trabajo (AIN)
Nivel de usuario necesario: Especialista (4) o superior.
Pantalla... M0009Unidades M1205Valores de trabajo (AIN) M1216Val. trab. act. (AIN) M1217
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Unidades de valores de trabajo (AIN)> desconectada.
Función activa Función <Unidades de valores de trabajo (AIN)> conectada.
46
Control de actuadorAjustes básicos para la puesta en servicio AC 01.2/ACExC 01.2
Ajustar valor máx., escalado y unidad
Nivel de usuario necesario: Especialista (4) o superior.
Pantalla... M0009Unidades M1205Valores de trabajo (AIN) M1216Valor máx. al 100.0 % M1217Escalada M1218Unidad M1219
Valores por defecto:Valor máx. al 100.0 % = 1000Escalada = 1Unidad = mARangos/valores de ajuste:Valor máx. al 100.0 % = 1 – 1000Escalada = 0.001 – 1000 (Multiplikator für Einheit)Unidad = mA; °C; bar; m³/h; m³/min; m; cm; mm; °
7.5.9. Unidades de salidas de señal analógicas (AOUT)
Activar las unidades de salidas de señal (AOUT)
Nivel de usuario necesario: Especialista (4) o superior.
Pantalla... M0009Unidades M1205Salidas señaliz (AOUT) M1221Activ. sal. señ. (AOUT) M1222
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Unidades de salidas de señal (AOUT)> desconectada.
Función activa Función <Unidades de salidas de señal (AOUT)> conectada.
Ajustar valor máx., escalado y unidad
Nivel de usuario necesario: Especialista (4) o superior.
Pantalla... M0009Unidades M1205Salidas señaliz (AOUT) M1221Valor máx. al 100.0 % M1223Escalada M1224Unidad M1225
Valores por defecto:Valor máx. al 100.0 % = 1000Escalada = 1Unidad = mARangos/valores de ajuste:Valor máx. al 100,0 % = 1 – 1000Escalada = 0.001 – 1000 (Multiplikator für Einheit)Unidad = mA; °C; bar; m³/h; m³/min; m; cm; mm; °
7.6. Contraste
Mediante el contraste se puede cambiar la iluminación de la pantalla (fondo másclaro u oscuro).
Pantalla... M0009Contraste M0230
47
Control de actuadorAC 01.2/ACExC 01.2 Ajustes básicos para la puesta en servicio
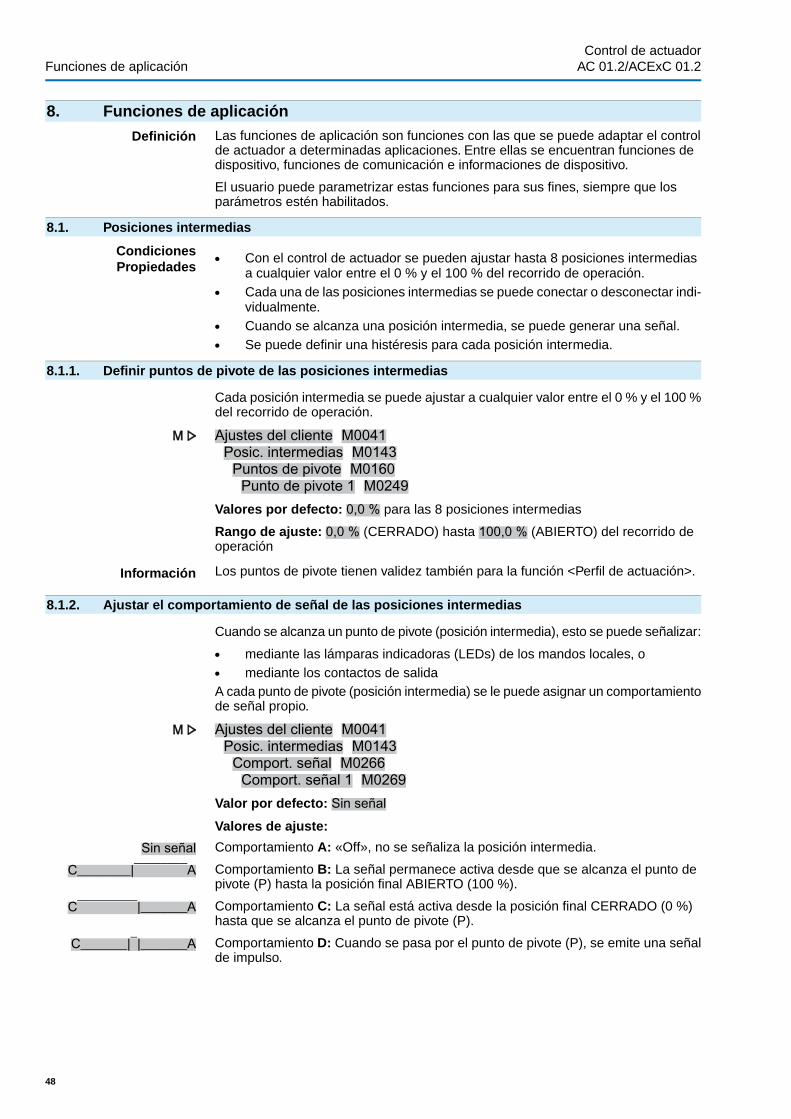
8. Funciones de aplicación
Definición Las funciones de aplicación son funciones con las que se puede adaptar el controlde actuador a determinadas aplicaciones. Entre ellas se encuentran funciones dedispositivo, funciones de comunicación e informaciones de dispositivo.
El usuario puede parametrizar estas funciones para sus fines, siempre que losparámetros estén habilitados.
8.1. Posiciones intermedias
CondicionesPropiedades
● Con el control de actuador se pueden ajustar hasta 8 posiciones intermediasa cualquier valor entre el 0 % y el 100 % del recorrido de operación.
● Cada una de las posiciones intermedias se puede conectar o desconectar indi-vidualmente.
● Cuando se alcanza una posición intermedia, se puede generar una señal.● Se puede definir una histéresis para cada posición intermedia.
8.1.1. Definir puntos de pivote de las posiciones intermedias
Cada posición intermedia se puede ajustar a cualquier valor entre el 0 % y el 100 %del recorrido de operación.
Ajustes del cliente M0041Posic. intermedias M0143Puntos de pivote M0160Punto de pivote 1 M0249
Valores por defecto: 0,0 % para las 8 posiciones intermedias
Rango de ajuste: 0,0 % (CERRADO) hasta 100,0 % (ABIERTO) del recorrido deoperación
Información Los puntos de pivote tienen validez también para la función <Perfil de actuación>.
8.1.2. Ajustar el comportamiento de señal de las posiciones intermedias
Cuando se alcanza un punto de pivote (posición intermedia), esto se puede señalizar:
● mediante las lámparas indicadoras (LEDs) de los mandos locales, o● mediante los contactos de salidaA cada punto de pivote (posición intermedia) se le puede asignar un comportamientode señal propio.
Ajustes del cliente M0041Posic. intermedias M0143Comport. señal M0266Comport. señal 1 M0269
Valor por defecto: Sin señalValores de ajuste:
Sin señal Comportamiento A: «Off», no se señaliza la posición intermedia.
C________|¯¯¯¯¯¯¯¯A Comportamiento B: La señal permanece activa desde que se alcanza el punto depivote (P) hasta la posición final ABIERTO (100 %).
C¯¯¯¯¯¯¯¯¯|_______A Comportamiento C: La señal está activa desde la posición final CERRADO (0 %)hasta que se alcanza el punto de pivote (P).
C_______|¯|_______A Comportamiento D: Cuando se pasa por el punto de pivote (P), se emite una señalde impulso.
48
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
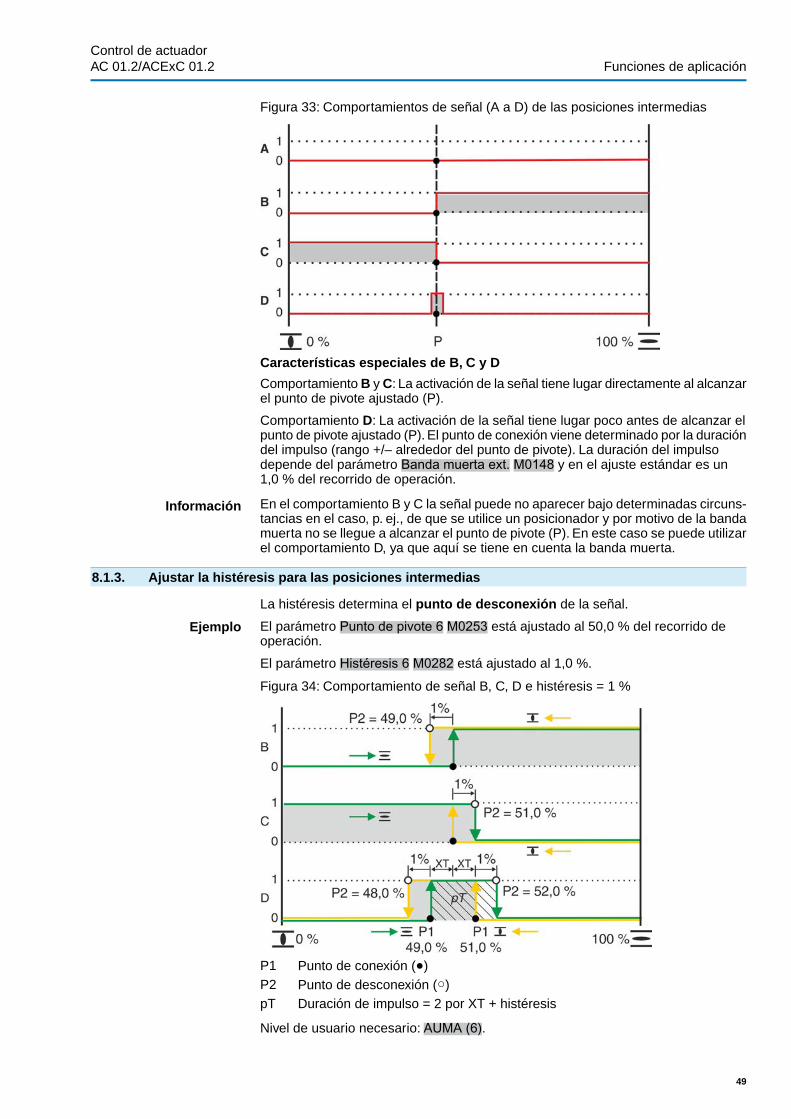
Figura 33: Comportamientos de señal (A a D) de las posiciones intermedias
Características especiales de B, C y D
Comportamiento B y C: La activación de la señal tiene lugar directamente al alcanzarel punto de pivote ajustado (P).
Comportamiento D: La activación de la señal tiene lugar poco antes de alcanzar elpunto de pivote ajustado (P). El punto de conexión viene determinado por la duracióndel impulso (rango +/– alrededor del punto de pivote). La duración del impulsodepende del parámetro Banda muerta ext. M0148 y en el ajuste estándar es un1,0 % del recorrido de operación.
Información En el comportamiento B y C la señal puede no aparecer bajo determinadas circuns-tancias en el caso, p. ej., de que se utilice un posicionador y por motivo de la bandamuerta no se llegue a alcanzar el punto de pivote (P). En este caso se puede utilizarel comportamiento D, ya que aquí se tiene en cuenta la banda muerta.
8.1.3. Ajustar la histéresis para las posiciones intermedias
La histéresis determina el punto de desconexión de la señal.
Ejemplo El parámetro Punto de pivote 6 M0253 está ajustado al 50,0 % del recorrido deoperación.
El parámetro Histéresis 6 M0282 está ajustado al 1,0 %.
Figura 34: Comportamiento de señal B, C, D e histéresis = 1 %
P1 Punto de conexión (●)P2 Punto de desconexión (○)pT Duración de impulso = 2 por XT + histéresis
Nivel de usuario necesario: AUMA (6).
49
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
Ajustes del cliente M0041Posic. intermedias M0143Histéresis M0267Histéresis 1 M0277
Valores por defecto: 0,5 % para las 8 posiciones
Rango de ajuste:0,0 % al 5,0 % del recorrido de operación (de ABIERTO aCERRADO).
Información En el caso de comportamiento de señal D, el valor XT (parámetro Banda muertaext. M0148) determina la duración de impulso pT e influye así en el punto de cone-xión P1.
8.2. Perfil de actuación (comportamiento operativo) en posiciones intermedias
Condiciones Función <Posicionador>, parámetro Posicionador M0158 = Función activa (nivel deusuario necesario: Especialista (4) o superior)
Propiedades Mediante la función <Perfil de actuación> se puede definir el comportamientooperativo del actuador cuando alcanza una posición intermedia. Ejemplo: El actuadorse para y continúa maniobrando sólo después de una nueva orden de maniobra.
La función es necesaria en aplicaciones especiales para evitar aumentos bruscosde presión, eventualmente también en combinación con el temporizador.
8.2.1. Activar el perfil de actuación
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Perfil actuación M0294
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Perfil de actuación> desactivada.
Función activa Función <Perfil de actuación> activada.
8.2.2. Establecer el comportamiento operativo para las posiciones intermedias (puntos de pivote)
El comportamiento operativo del actuador cuando se alcanza una posición intermediase puede ajustar.
Ajustes del cliente M0041Posic. intermedias M0143Comport. operación M0257Comport. operación 1 M0258
Valor por defecto: OffValores de ajuste:
Off Sin parada intermedia, el actuador sigue maniobrando.
Paro en ABRIR ● Durante la maniobra en sentido ABRIR, el actuador se para en el punto de pi-vote.
● Para continuar maniobrando, se debe emitir de nuevo una orden de maniobra.● Esta función no es efectiva en el modo de operación Remoto SETPOINT.
Paro en CERRAR ● Durante la maniobra en sentido CERRAR, el actuador se para en el punto depivote.
● Para continuar maniobrando, se debe emitir de nuevo una orden de maniobra.● Esta función no es efectiva en el modo de operación Remoto SETPOINT.
Paro en ABR + CERR. ● Cuando se alcanza el punto de pivote, el actuador se para.
50
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
● Para continuar maniobrando, se debe emitir de nuevo una orden de maniobra.● Esta función no es efectiva en el modo de operación Remoto SETPOINT.
Tiempo pausa ABR. Durante la maniobra en sentido ABRIR, el actuador se para en el punto de pivote.Cuando una vez expirado el tiempo de pausa llega una orden de maniobra en sentidoABRIR, el actuador sigue maniobrando en sentido ABRIR. Si durante el tiempo depausa llega una orden de maniobra en sentido CERRAR, la pausa se cancela y lamaniobra se reanuda en sentido CERRAR.
Tiempo pausa CERR. Durante la maniobra en sentido CERRAR, el actuador se para cuando llega al puntode pivote. Cuando una vez expirado el tiempo de pausa llega una orden de maniobraen sentido CERRAR, el actuador sigue maniobrando en sentido CERRAR. Si duranteel tiempo de pausa llega una orden de maniobra en sentido ABRIR, la pausa secancela y la maniobra se reanuda en sentido ABRIR.
Tiempo pausa A + C Cuando se alcanza el punto de pivote, el actuador se para. Cuando una vez expiradoel tiempo de pausa llega una orden de maniobra en sentido ABRIR o CERRAR, elactuador sigue maniobrando de acuerdo con la orden de maniobra.
Información En cada posición intermedia activada que tenga asignado el comportamiento opera-tivo Paro en ABRIR, Paro en CERRAR o Paro en ABR + CERR., el actuador para.
8.2.3. Ajustar los tiempos de pausa para las posiciones intermedias (puntos de pivote)
Se puede definir un tiempo de pausa para cada punto de pivote.
Cuando se alcanza un punto de pivote con el comportamiento operativo Tiempopausa ABR., Tiempo pausa CERR. o Tiempo pausa A + C, el control de actuadorgenera durante el tiempo de pausa la señal Pausa oper. activa.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Posic. intermedias M0143Tiempos pausa M0268Tiempo pausa 1 M0285
Valores por defecto: 00:01,0 min:s (1 segundo)
Rangos de ajuste: 00:00,2 ... 30:00,0 min : s (0,2 segundos – 30 minutos)
8.3. Control de dos hilos
Condiciones Modo de operación Remoto (Selector = Posición Operación remota).
Propiedades Con la función de control de dos hilos, el actuador se puede maniobrar medianteuna entrada digital a las posiciones finales ABIERTO o CERRADO.
Información En esta función, el actuador reacciona sólo a las órdenes de la entrada ABRIR /CERRAR. Las otras entradas a las que se les han asignado las órdenes de maniobraABRIR, PARO, CERRAR, carecen de función.
Ejecutar órdenes de maniobra mediante la entrada digital:
Nombre de la entrada digital: ABRIR / CERRARNombre en el diagrama de cableado: ABRIR/CERRAR
Ajuste por defecto ● Entrada ABRIR / CERRAR = nivel Low (0 V DC o entrada abierta):El actuador maniobra en sentido CERRAR.
● Entrada ABRIR / CERRAR = nivel High (estándar: +24 V DC):El actuador maniobra en sentido ABRIR.
Configuración de la entrada digital
Para un control de dos hilos debe haber configurada una entrada digital para la señalABRIR / CERRAR.
Nivel de usuario necesario: Especialista (4)
Config. dispositivo M0053
51
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
Interface I/O M0139Entradas digitales M0116
Ejemplo Utilizar entrada DIN 5 para señal ABRIR / CERRAR :
Parámetro: Señal DIN 5 M0122 = ABRIR/CERRAR
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 6 M0128) es la entrada High active o Low active.El ajuste por defecto es High active.
8.4. Posicionador (modo de operación Remoto SETPOINT):
Condiciones Condición para esta función es uno de los siguientes equipamientos:
● Unidad de mando electrónica (versión no intrusiva)● Potenciómetro● Transmisor electrónico de posición EWG/RWGOtras condiciones para el modo de operación del posicionador:
● Posicionador habilitado y activado.● Modo de operación Remoto (Selector = Posición Operación remota).
Propiedades El posicionador registra el setpoint de posición E1 y el valor real de posición E2 ylos compara. Dependiendo de la desviación entre ellos, el motor se opera en sentidoABRIR o CERRAR.
Información ● Si el actuador se controla mediante una especificación de setpoint(p. ej., 0 – 20 mA), la indicación de estado S0003 de la pantalla muestra tantoel setpoint de posición E1, como el valor real de posición E2.
● Si la indicación de estado S0003 muestra sólo el valor real de posición E2, elcontrol ABRIR - CERRAR está activo, no tiene lugar ningún control de setpointmediante el posicionador. En este caso se debe cambiar antes al control desetpoint, véase el capítulo <Cambio entre control ABRIR - CERRAR y controlde setpoint>.
8.4.1. Activar el posicionador
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Posicionador M0158
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Posicionador> desactivada.
Función activa Función <Posicionador> activada.
8.4.2. Activar/desactivar el comportamiento adaptativo
La regulación adaptativa puede reducir el número de arrancadas y compensar elpost-recorrido del actuador.
Ajustes del cliente M0041Posicionador M0145Comp. adaptativo M0147
Valor por defecto: Adaptativo IValores de ajuste:
Off Comportamiento adaptativo desconectado.
Adaptativo I Comportamiento adaptativo para posicionamiento exacto (elevada exactitud deregulación).
52
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
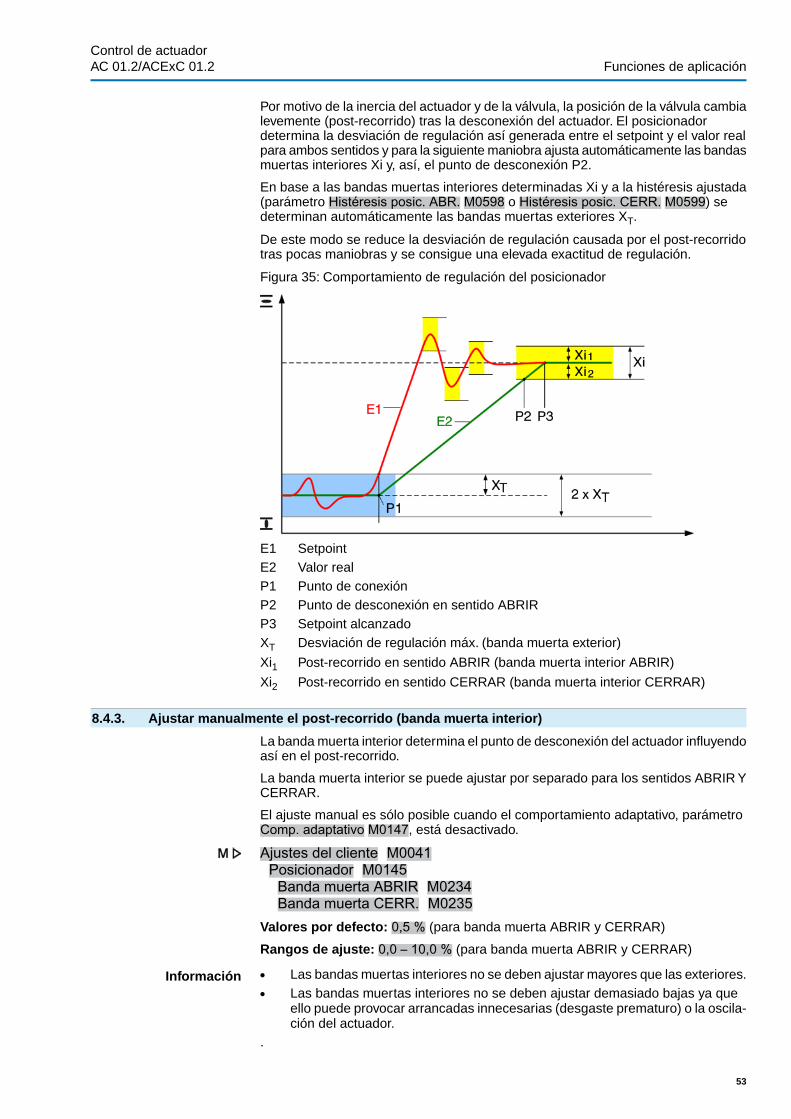
Por motivo de la inercia del actuador y de la válvula, la posición de la válvula cambialevemente (post-recorrido) tras la desconexión del actuador. El posicionadordetermina la desviación de regulación así generada entre el setpoint y el valor realpara ambos sentidos y para la siguiente maniobra ajusta automáticamente las bandasmuertas interiores Xi y, así, el punto de desconexión P2.
En base a las bandas muertas interiores determinadas Xi y a la histéresis ajustada(parámetro Histéresis posic. ABR. M0598 o Histéresis posic. CERR. M0599) sedeterminan automáticamente las bandas muertas exteriores XT.
De este modo se reduce la desviación de regulación causada por el post-recorridotras pocas maniobras y se consigue una elevada exactitud de regulación.
Figura 35: Comportamiento de regulación del posicionador
E1 SetpointE2 Valor realP1 Punto de conexiónP2 Punto de desconexión en sentido ABRIRP3 Setpoint alcanzadoXT Desviación de regulación máx. (banda muerta exterior)
Xi1 Post-recorrido en sentido ABRIR (banda muerta interior ABRIR)
Xi2 Post-recorrido en sentido CERRAR (banda muerta interior CERRAR)
8.4.3. Ajustar manualmente el post-recorrido (banda muerta interior)
La banda muerta interior determina el punto de desconexión del actuador influyendoasí en el post-recorrido.
La banda muerta interior se puede ajustar por separado para los sentidos ABRIR YCERRAR.
El ajuste manual es sólo posible cuando el comportamiento adaptativo, parámetroComp. adaptativo M0147, está desactivado.
Ajustes del cliente M0041Posicionador M0145Banda muerta ABRIR M0234Banda muerta CERR. M0235
Valores por defecto: 0,5 % (para banda muerta ABRIR y CERRAR)
Rangos de ajuste: 0,0 – 10,0 % (para banda muerta ABRIR y CERRAR)
Información ● Las bandas muertas interiores no se deben ajustar mayores que las exteriores.● Las bandas muertas interiores no se deben ajustar demasiado bajas ya que
ello puede provocar arrancadas innecesarias (desgaste prematuro) o la oscila-ción del actuador.
.
53
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
8.4.4. Ajustar manualmente la desviación de regulación máx. (banda muerta exterior)
La banda muerta exterior determina el punto de conexión del actuador.
El motor se conecta cuando el valor real (señal de entrada E2) o un cambio delsetpoint es mayor que la desviación de regulación máxima determinada por la bandamuerta exterior.
El ajuste manual es sólo posible cuando el comportamiento adaptativo, parámetroComp. adaptativo M0147, está desactivado.
Ajustes del cliente M0041Posicionador M0145Banda muerta ext. M0148
Valor por defecto: 1,0 %Rango de ajuste: 0,1 – 10,0 %
8.4.5. Ajustar el tiempo muerto
El tiempo muerto evita, dentro del intervalo especificado, la realización de unamaniobra a una nueva posición de setpoint.
Ajustes del cliente M0041Posicionador M0145Tiempo muerto M0149
Valor por defecto: 3,0 sRango de ajuste: 0,2 – 60,0 s segundos
Información Desde el control de actuador se debe asegurar que no se supere el número máximoadmisible de arrancadas del motor del actuador. Esto se puede conseguir ajustandoel tiempo muerto a un valor lo bastante grande.
8.4.6. Ajustar la histéresis para el posicionador
La histéresis determina la exactitud de las arrancadas. De este modo se puede, p.ej., reducir el número de arrancadas.
El ajuste es sólo posible cuando el comportamiento adaptativo, parámetro Comp.adaptativo M0147, está ajustado a Adaptativo I .
Ajustes del cliente M0041Posicionador M0145Histéresis posic. ABR. M0598Histéresis posic. CERR. M0599
Valores por defecto: 0,5 % para ABIERTO y CERRADO
Rango de ajuste: 0,2 % a 5,0 % del recorrido de operación (de ABIERTO aCERRADO).
8.4.7. Cerrar herméticamente/abrir por completo (tolerancia de posiciones finales para el setpoint)
Si por falta de exactitud de la señal analógica de setpoint (0/4 mA o 20 mA) no sealcanzan las posiciones finales, se puede ajustar una tolerancia para el setpoint enlas posiciones finales. Cuando no se alcanzan o se superan las tolerancias, elactuador continúa maniobrando hasta que ha alcanzado por completo la posiciónfinal. De este modo se asegura que el actuador se abra o se cierre por completo.
Ajustes del cliente M0041Posicionador M0145Tolerancia CERRAR M0150Tolerancia ABRIR M0151
Valores por defecto:Tolerancia CERRAR = 0,0 %Tolerancia ABRIR = 100,0 %
54
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
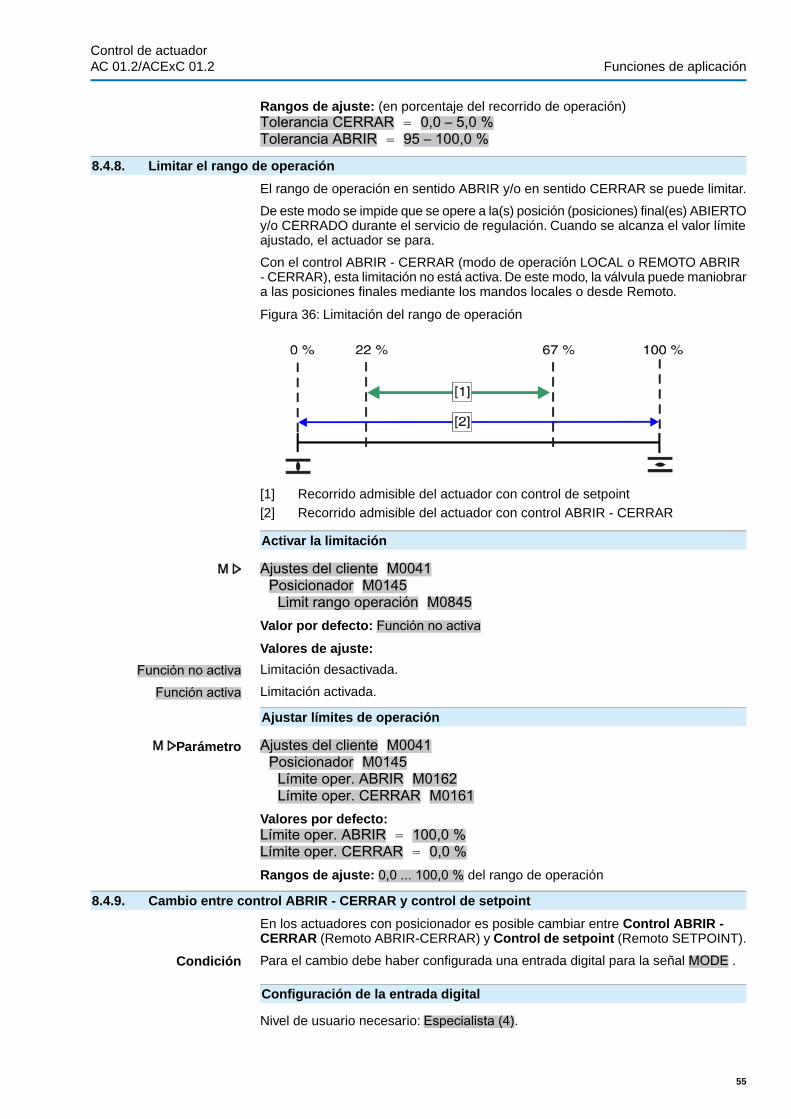
Rangos de ajuste: (en porcentaje del recorrido de operación)Tolerancia CERRAR = 0,0 – 5,0 %Tolerancia ABRIR = 95 – 100,0 %
8.4.8. Limitar el rango de operación
El rango de operación en sentido ABRIR y/o en sentido CERRAR se puede limitar.
De este modo se impide que se opere a la(s) posición (posiciones) final(es) ABIERTOy/o CERRADO durante el servicio de regulación. Cuando se alcanza el valor límiteajustado, el actuador se para.
Con el control ABRIR - CERRAR (modo de operación LOCAL o REMOTO ABRIR- CERRAR), esta limitación no está activa. De este modo, la válvula puede maniobrara las posiciones finales mediante los mandos locales o desde Remoto.
Figura 36: Limitación del rango de operación
[1] Recorrido admisible del actuador con control de setpoint[2] Recorrido admisible del actuador con control ABRIR - CERRAR
Activar la limitación
Ajustes del cliente M0041Posicionador M0145Limit rango operación M0845
Valor por defecto: Función no activaValores de ajuste:
Función no activa Limitación desactivada.
Función activa Limitación activada.
Ajustar límites de operación
Parámetro Ajustes del cliente M0041Posicionador M0145Límite oper. ABRIR M0162Límite oper. CERRAR M0161
Valores por defecto:Límite oper. ABRIR = 100,0 %Límite oper. CERRAR = 0,0 %Rangos de ajuste: 0,0 ... 100,0 % del rango de operación
8.4.9. Cambio entre control ABRIR - CERRAR y control de setpoint
En los actuadores con posicionador es posible cambiar entre Control ABRIR -CERRAR (Remoto ABRIR-CERRAR) y Control de setpoint (Remoto SETPOINT).
Condición Para el cambio debe haber configurada una entrada digital para la señal MODE .
Configuración de la entrada digital
Nivel de usuario necesario: Especialista (4).
55
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Utilizar la entrada DIN1 para el cambio:
Parámetros: Señal DIN 1 M0118Valor de ajuste: MODE (Nombre en el diagrama de cableado: MODE)
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 4 M0126) es la entrada High active o Low active.El ajuste por defecto de la entrada MODE es Low active.
Cambio mediante la entrada digital MODE
Comportamiento de conmutación en la codificación Low active:
(Ajuste de fábrica)
● Entrada MODE= nivel Low (0 V DC o entrada abierta) = Remoto SETPOINT:El actuador reacciona a una señal de setpoint (p. ej., 0/4 – 20 mA)
● Entrada MODE = nivel High (estándar: +24 V DC = Remoto ABRIR-CERRAR:El actuador reacciona a las órdenes de maniobra ABRIR, PARO, CERRAR.
8.4.10. Entrada Setpoint de posición
El valor de setpoint de posición se suele realizar mediante la entrada AIN 1, perotambién se puede hacer mediante AIN 2.
Nivel de usuario necesario: AUMA (6).
Config. dispositivo M0053Interface I/O M0139Entradas analógicas M0389Señal AIN 1 M0135Señal AIN 2 M0138
Valor por defecto AIN 1: Posición Setpoint
8.4.11. Rango de entrada del setpoint de posición
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Interface I/O M0139Entradas analógicas M0389Límite inferior AIN 1 M0133Límite superior AIN 1 M0134Valores por defecto:
Límite inferior AIN 1 = 0 mALímite superior AIN 1 = 20 mAValores de ajuste: 0 ... 20 mA
8.4.12. Funcionamiento con rango partido
Condiciones ● La función <Posicionador> debe estar habilitada y activada.
Función El rango partido permite que el setpoint de posición E1 sea compartido por hastatres posicionadores. Un ejemplo típico de aplicación es una tubería con by-pass. Elactuador montado en el by-pass reacciona al rango inferior (p. ej., 0 – 10 mA) y elactuador de la válvula principal reacciona al rango superior (10 – 20 mA). Si elsetpoint de posición queda dentro del rango de setpoint definido para el actuadorcorrespondiente, el actuador se comporta como en el funcionamiento de posicionadornormal. Si el setpoint de posición queda por encima del límite superior o por debajodel límite inferior del rango de setpoint del actuador correspondiente, el actuadormaniobra a la posición ABIERTO o CERRADO.
56
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
El límite superior y el inferior de setpoint del actuador correspondiente se definemediante su entrada analógica. (<Rango de entrada del setpoint de posición>)
Además se debe definir un límite de rango superior e inferior del setpoint total (válidopara todos los actuadores reunidos en un funcionamiento de rango partido).
Activar el funcionamiento con rango partido
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Modo de rango partido M01650
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Funcionamiento con rango partido> desconectada.
Función activa Función <Funcionamiento con rango partido> conectada.
Ajustar el rango de setpoint total
En el funcionamiento con rango partido se utiliza el límite inferior de setpoint totalajustado aquí como origen de fallo para el comportamiento en fallo. <Comportamientoen fallo en caso de pérdida de señal>
Ajustes del cliente M0041Posicionador M0145Setpoint Low-Limit M01651Setpoint High-Limit M01652
Valores por defecto:Setpoint Low-Limit = 0,0 mASetpoint High-Limit = 20,0 mARangos de ajuste: 0,0 ... 20,0 mA
8.5. Controlador de procesos
Condiciones Condición para esta función es uno de los siguientes equipamientos:
● Unidad de mando electrónica con MWG (versión no intrusiva)● Potenciómetro● Transmisor electrónico de posición EWG/RWGOtras condiciones para el modo de operación del controlador de procesos:
● Controlador de procesos habilitado y activado.● Modo de operación Remoto (Selector = Posición Operación remota).
Propiedades La siguiente figura muestra el modo de funcionamiento del controlador de procesos:
El controlador de procesos [2] recibe el setpoint del proceso E7 y el valor real delproceso E4 (p. ej., de un sensor). A partir de estos valores determina el setpoint deposición E1 para el posicionador [3]. El posicionador [3] compara esta especificacióndel setpoint con el valor real de posición E2 de la válvula y envía las órdenes demaniobra (ABRIR- CERRAR) al actuador.
57
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
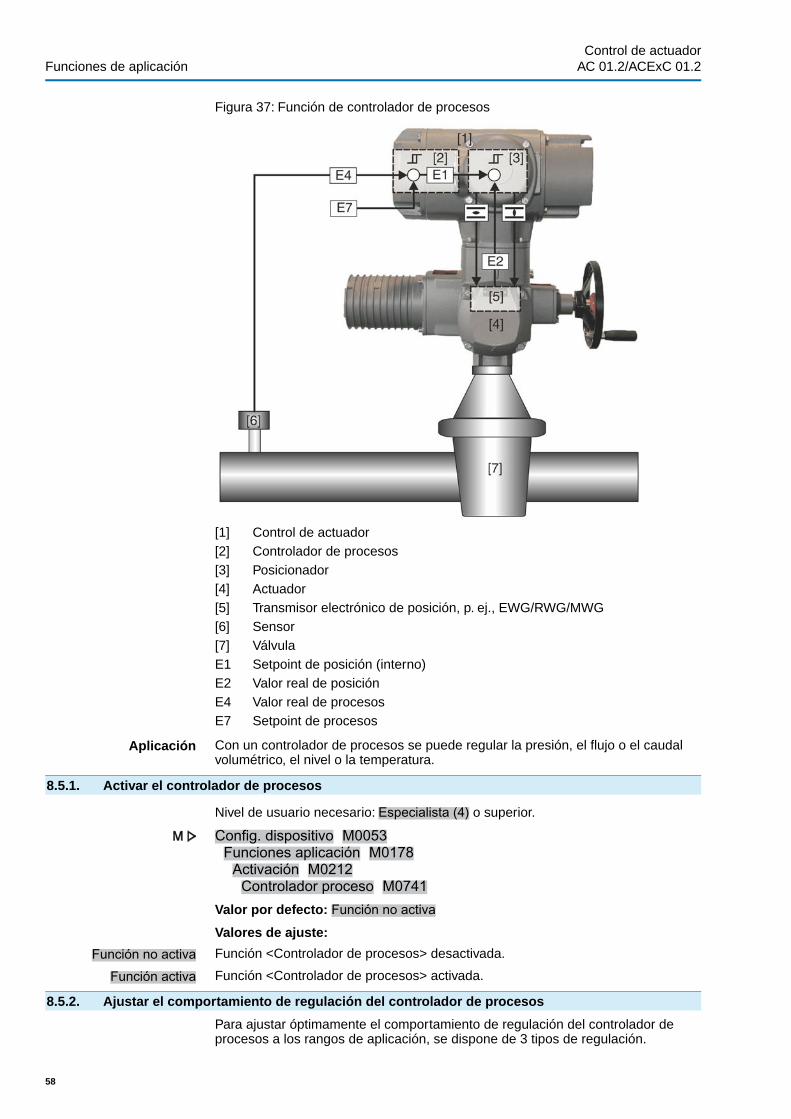
Figura 37: Función de controlador de procesos
[1] Control de actuador[2] Controlador de procesos[3] Posicionador[4] Actuador[5] Transmisor electrónico de posición, p. ej., EWG/RWG/MWG[6] Sensor[7] VálvulaE1 Setpoint de posición (interno)E2 Valor real de posiciónE4 Valor real de procesosE7 Setpoint de procesos
Aplicación Con un controlador de procesos se puede regular la presión, el flujo o el caudalvolumétrico, el nivel o la temperatura.
8.5.1. Activar el controlador de procesos
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Controlador proceso M0741
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Controlador de procesos> desactivada.
Función activa Función <Controlador de procesos> activada.
8.5.2. Ajustar el comportamiento de regulación del controlador de procesos
Para ajustar óptimamente el comportamiento de regulación del controlador deprocesos a los rangos de aplicación, se dispone de 3 tipos de regulación.
58
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
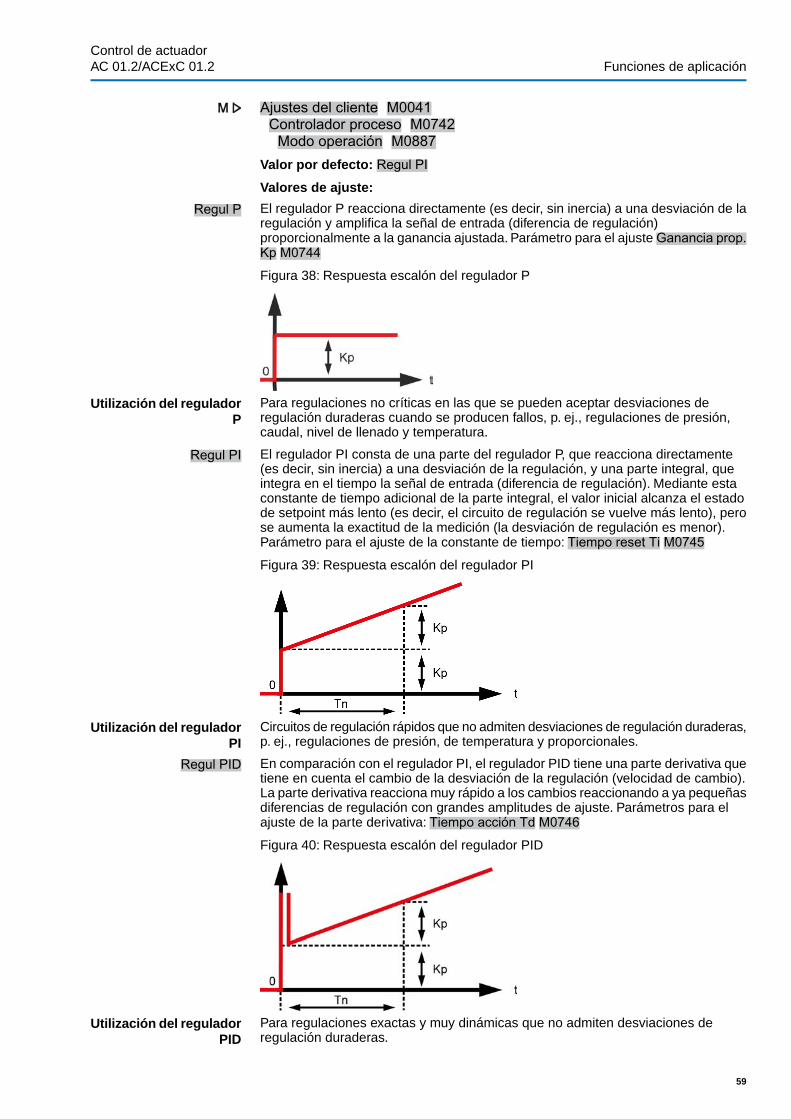
Ajustes del cliente M0041Controlador proceso M0742Modo operación M0887
Valor por defecto: Regul PIValores de ajuste:
Regul P El regulador P reacciona directamente (es decir, sin inercia) a una desviación de laregulación y amplifica la señal de entrada (diferencia de regulación)proporcionalmente a la ganancia ajustada. Parámetro para el ajuste Ganancia prop.Kp M0744Figura 38: Respuesta escalón del regulador P
Utilización del reguladorP
Para regulaciones no críticas en las que se pueden aceptar desviaciones deregulación duraderas cuando se producen fallos, p. ej., regulaciones de presión,caudal, nivel de llenado y temperatura.
Regul PI El regulador PI consta de una parte del regulador P, que reacciona directamente(es decir, sin inercia) a una desviación de la regulación, y una parte integral, queintegra en el tiempo la señal de entrada (diferencia de regulación). Mediante estaconstante de tiempo adicional de la parte integral, el valor inicial alcanza el estadode setpoint más lento (es decir, el circuito de regulación se vuelve más lento), perose aumenta la exactitud de la medición (la desviación de regulación es menor).Parámetro para el ajuste de la constante de tiempo: Tiempo reset Ti M0745Figura 39: Respuesta escalón del regulador PI
Utilización del reguladorPI
Circuitos de regulación rápidos que no admiten desviaciones de regulación duraderas,p. ej., regulaciones de presión, de temperatura y proporcionales.
Regul PID En comparación con el regulador PI, el regulador PID tiene una parte derivativa quetiene en cuenta el cambio de la desviación de la regulación (velocidad de cambio).La parte derivativa reacciona muy rápido a los cambios reaccionando a ya pequeñasdiferencias de regulación con grandes amplitudes de ajuste. Parámetros para elajuste de la parte derivativa: Tiempo acción Td M0746Figura 40: Respuesta escalón del regulador PID
Utilización del reguladorPID
Para regulaciones exactas y muy dinámicas que no admiten desviaciones deregulación duraderas.
59
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
8.5.3. Origen de setpoint (entrada para setpoint de procesos)
Ajustes del cliente M0041Controlador proceso M0742Origen setpoint M0743
Valor por defecto: Interface I/OValores de ajuste:
Interface I/O El setpoint del proceso se especifica mediante una entrada analógica (AIN 1 o AIN2) del interface I/O.
Setpoint interno El setpoint del proceso es generado internamente por el control de actuador.Parámetro Setpoint interno 1 M0749 / Setpoint interno 2 M0750
Información Para poder utilizar el setpoint interno 2 debe haber configurada una entrada digitalpara ello.
8.5.4. Comportamiento en caso de fallo de setpoint de procesos
Ajustes del cliente M0041Controlador proceso M0742Comp. a fallo setpoint M0747
Valor por defecto: Setpoint interno 1Valores de ajuste:
Setpoint interno 1 En caso de pérdida de señal de setpoint del proceso, el control de actuador conmutaa un setpoint interno 1. Parámetro Setpoint interno 1 M0749
Setpoint interno 2 En caso de pérdida de señal de setpoint del proceso, el control de actuador conmutaa un setpoint interno 2. Parámetro Setpoint interno 2 M0750
Comp. en fallo En caso de pérdida de señal de setpoint del proceso, se activa el comportamientoen fallo. Parámetro Comport. en fallo M0378
Último valor nominal En caso de pérdida de señal de setpoint del proceso se utiliza el último setpoint deprocesos disponible como setpoint.
8.5.5. Operación inversa
De forma estándar, el actuador para servicio de regulación abre la válvula en cuantoel valor real del proceso es menor que el setpoint del proceso. Sin embargo,dependiendo del proceso puede ser necesario que una válvula se cierre cuando elvalor real del proceso sea menor que el setpoint del proceso. En este caso elcontrolador de procesos se puede conmutar a la operación inversa medianteparámetros.
Ajustes del cliente M0041Controlador proceso M0742Operación inversa M0748
Valor por defecto: Función no activaValores de ajuste:
Función no activa La operación inversa está desactivada.
Función activa La operación inversa está activada.
8.5.6. Setpoint de procesos interno
Con este parámetro se puede ajustar un setpoint interno de proceso. El setpointinterno de proceso se utiliza cuando:
● el parámetro Origen setpoint M0743 está ajustado al valor Setpoint interno o● el parámetro Comp. a fallo setpoint M0747 está ajustado al valor Setpoint interno
1 o Setpoint interno 2 .
Ajustes del cliente M0041Controlador proceso M0742
60
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
Setpoint interno 1 M0749Setpoint interno 2 M0750
Valor por defecto: 50,0 %Rango de ajuste: 0,0 ... 100,0 %
8.5.7. Procedimiento para el ajuste
El ajuste del controlador de procesos depende en gran medida del entorno operativodel regulador. En la mayoría de las aplicaciones, un regulador PI es suficiente.
Procedimiento 1. Utilizar el regulador como regulador PI, es decir, ajustar los parámetros del si-guiente modo:- Ganancia proporcional Kp = 1- Tiempo de reset Ti = 1.000 s- Tiempo de acción Td = 0
2. Doblar la ganancia proporcional Kp hasta que el circuito empiece a vibrar.3. Reducir la ganancia proporcional Kp al 60 % del valor ajustado.4. Reducir el tiempo de reset Ti hasta que la diferencia de regulación sea igual a
cero.
8.5.8. Ajustar la ganancia proporcional Kp
Cuando se produce una diferencia de regulación, la parte proporcional cambiadirectamente (es decir, sin inercia) la magnitud del ajuste proporcionalmente a ladiferencia de regulación.
Si una pequeña desviación de la regulación requiere ya un cambio grande en laposición de la válvula, la ganancia proporcional Kp se debe aumentar.
Información Si la reacción es demasiado fuerte (vibración excesiva), el valor se debe reducir. Sila reacción es demasiado débil, el valor se debe aumentar.
Ajustes del cliente M0041Controlador proceso M0742Ganancia prop. Kp M0744
Valor por defecto: 1,0Rango de ajuste: 0,1 ... 10,0
8.5.9. Ajustar el tiempo de reset Ti
El tiempo de reset determina la parte integral del regulador. Cuanto más lento seaun sistema, mayor se debe ajustar este valor.
Información ● En caso de tendencia a las vibraciones se debe aumentar el Ti.● Si las reacciones son demasiado lentas, se debe reducir el Ti.● Valor inicial para procesos rápidos (p. ej., presión): 10 s● Valor inicial para procesos lentos (p. ej., temperatura): 1000 s
Ajustes del cliente M0041Controlador proceso M0742Tiempo reset Ti M0745
Valor por defecto: 1000 s (segundos)
Rango de ajuste: 1 ... 1000 s
8.5.10. Ajustar el tiempo de acción Td
El tiempo de acción determina la parte derivativa del regulador. Normalmente, aquíno es necesario ningún ajuste (= 0) ya que el actuador y la válvula – por motivo deltiempo de maniobra – no pueden reaccionar escalonadamente a una diferencia deregulación repentina.
61
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
Información ● En caso de tendencia a las vibraciones se debe aumentar el Td.● Valor inicial para actuadores 0 s
Ajustes del cliente M0041Controlador proceso M0742Tiempo acción Td M0746
Valor por defecto: 0 s (segundos)
Rango de ajuste: 1 ... 100 s
8.5.11. Origen del valor real (entrada para el valor real del proceso)
Ajustes del cliente M0041Controlador proceso M0742Origen valor real M0756
Valor por defecto: Inteface I/OValores de ajuste:
Inteface I/O El valor real del proceso se especifica mediante una entrada analógica (AIN 1 oAIN 2) del interface I/O.
8.6. Modo por pasos
Condiciones Condición para esta función es uno de los siguientes equipamientos:
● Unidad de mando electrónica (versión no intrusiva)● Potenciómetro● Transmisor electrónico de posición EWG/RWG
Propiedades ● Con el modo por pasos se puede prolongar el tiempo de maniobra en rangosparciales o en todo el recorrido de operación.
● El modo por pasos se puede activar por separado para los sentidos ABRIR yCERRAR.
62
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
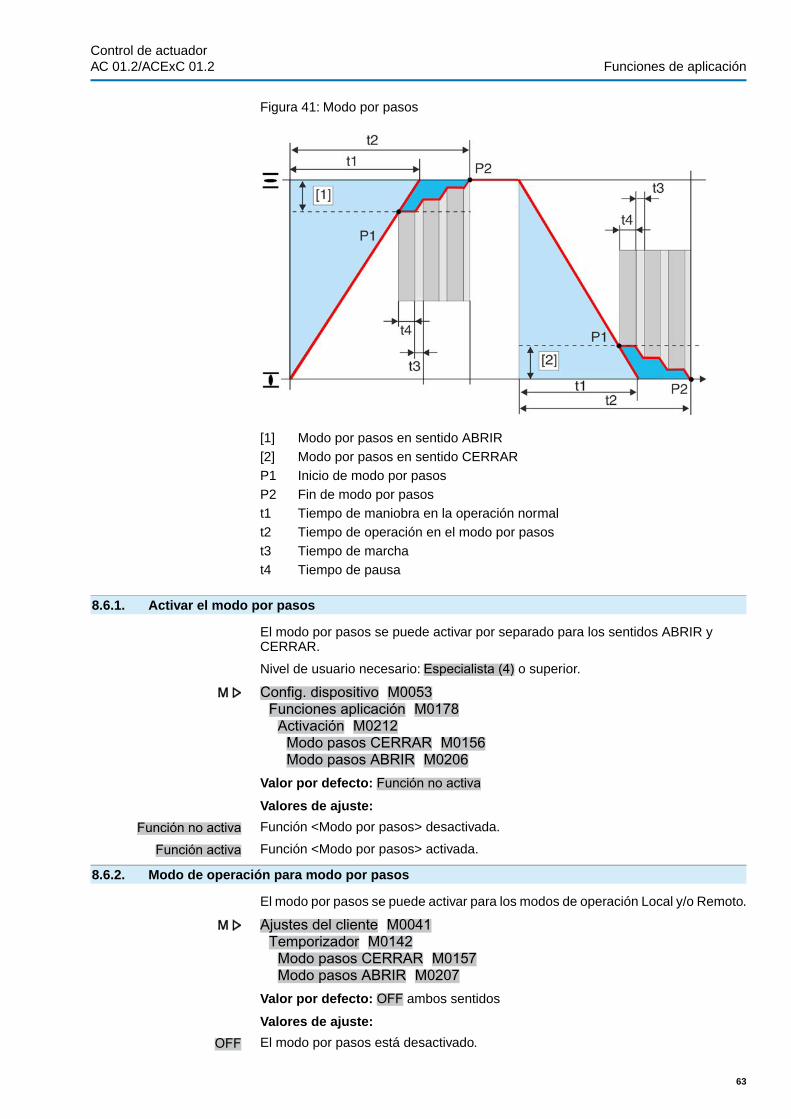
Figura 41: Modo por pasos
[1] Modo por pasos en sentido ABRIR[2] Modo por pasos en sentido CERRARP1 Inicio de modo por pasosP2 Fin de modo por pasost1 Tiempo de maniobra en la operación normalt2 Tiempo de operación en el modo por pasost3 Tiempo de marchat4 Tiempo de pausa
8.6.1. Activar el modo por pasos
El modo por pasos se puede activar por separado para los sentidos ABRIR yCERRAR.
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Modo pasos CERRAR M0156Modo pasos ABRIR M0206
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Modo por pasos> desactivada.
Función activa Función <Modo por pasos> activada.
8.6.2. Modo de operación para modo por pasos
El modo por pasos se puede activar para los modos de operación Local y/o Remoto.
Ajustes del cliente M0041Temporizador M0142Modo pasos CERRAR M0157Modo pasos ABRIR M0207
Valor por defecto: OFF ambos sentidos
Valores de ajuste:
OFF El modo por pasos está desactivado.
63
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
REMOTO El modo por pasos está activo en los modos de operación:Remoto, Remoto II, BusLOCAL El modo por pasos está activo en los modos de operación: Local, Servicio
REMOTO+LOCAL El modo por pasos está activo en los modos de operación:Remoto, Remoto II, Bus,Local, Servicio
Información El temporizador se puede puentear en el <Modo de operación EMERGENCIA>.
8.6.3. Inicio y fin de modo por pasos
El inicio y el fin del modo por pasos se pueden ajustar por separado para ambossentidos.
Ajustes del cliente M0041Temporizador M0142Fin pasos CERRAR M0152Inicio pasos CERRAR M0153Inicio pasos ABRIR M0154Fin pasos ABRIR M0155
Valores por defecto:Fin pasos CERRAR = 0,0 %Inicio pasos CERRAR = 100,0 %Inicio pasos ABRIR = 0,0 %Fin pasos ABRIR = 100,0 %Rangos de ajuste:Fin pasos CERRAR = 0,0 – 99,9 %Inicio pasos CERRAR = 0,1 – 100,0 %Inicio pasos ABRIR = 0,0 – 99,9 %Fin pasos ABRIR = 0,1 – 100,0 %
8.6.4. Tiempos de marcha y tiempos de pausa
Los tiempos de marcha y de pausa se pueden ajustar independientemente para lossentidos ABRIR y CERRAR.
Ajustes del cliente M0041Temporizador M0142Tiempo marcha CERR M0163Tiempo pausa CERR. M0164Tiempo marcha ABR. M0165Tiempo pausa ABR. M0166
Valores por defecto: 00:05,0 min : s (= 5 segundos; para todos los tiempos demarcha y de pausa)
Rangos de ajuste: 00:01,0 ... 30:00,0 min : s (1 segundo hasta 30 minutos; paratodos los tiempos de marcha y de pausa)
8.7. Función de by-pass
Aplicación La función de by-pass se utiliza, p. ej., en tuberías de calor a distancia. Cuando lapresión en la tubería es alta, no se puede accionar la compuerta de la válvulaprincipal, por lo que antes de ello es necesaria una compensación de presiónmediante una válvula by-pass.
Modo de funcionamiento Dos válvulas – una válvula principal y una válvula by-pass – se acoplan mediantelas señales de habilitación Bypass Sync In y Bypass Sync Out entre sí. Una ordende maniobra se puede ejecutar sólo cuando uno de los dos actuadores le da al otrola señal de habilitación. La habilitación depende las posiciones finales. De este modose asegura que sólo se puedan ejecutar las siguientes órdenes de maniobra:
● La válvula principal sólo puede maniobrar en sentido ABRIR o CERRARcuando la válvula by-pass se encuentra en la posición final ABIERTO.
64
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
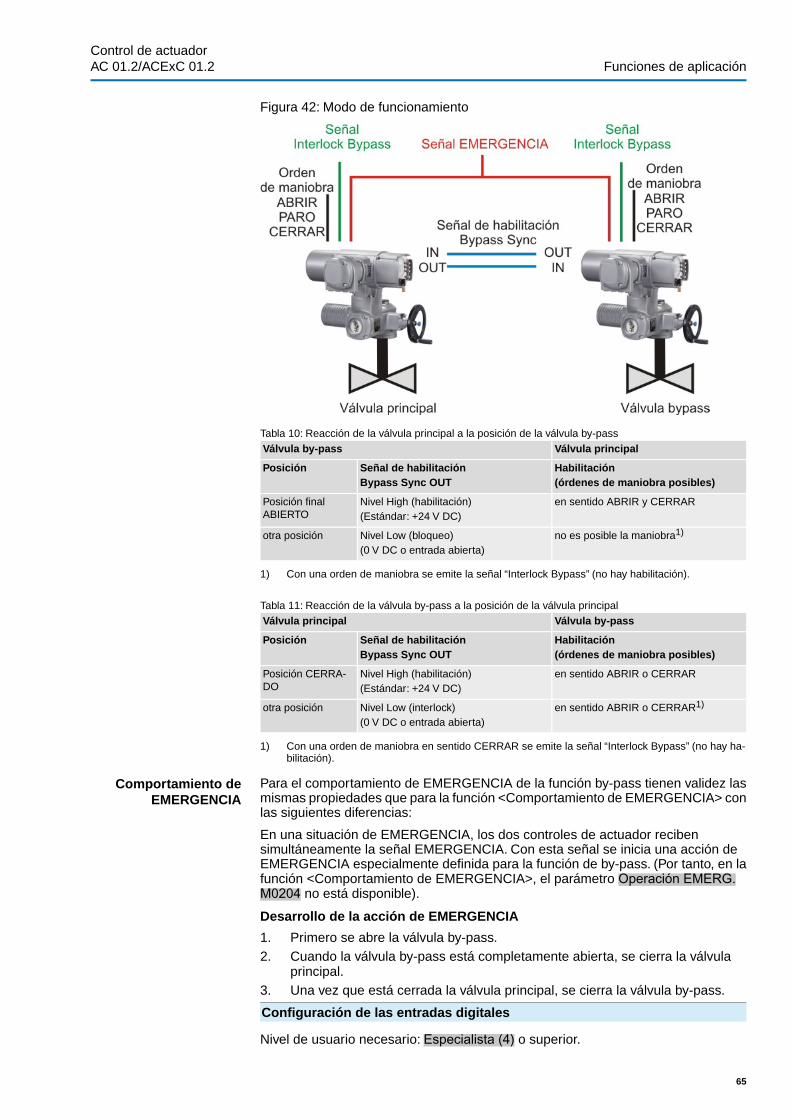
Figura 42: Modo de funcionamiento
Tabla 10: Reacción de la válvula principal a la posición de la válvula by-passVálvula principalVálvula by-pass
Habilitación(órdenes de maniobra posibles)
Señal de habilitaciónBypass Sync OUT
Posición
en sentido ABRIR y CERRARNivel High (habilitación)(Estándar: +24 V DC)
Posición finalABIERTO
no es posible la maniobra1)Nivel Low (bloqueo)(0 V DC o entrada abierta)
otra posición
Con una orden de maniobra se emite la señal “Interlock Bypass” (no hay habilitación).1)
Tabla 11: Reacción de la válvula by-pass a la posición de la válvula principalVálvula by-passVálvula principal
Habilitación(órdenes de maniobra posibles)
Señal de habilitaciónBypass Sync OUT
Posición
en sentido ABRIR o CERRARNivel High (habilitación)(Estándar: +24 V DC)
Posición CERRA-DO
en sentido ABRIR o CERRAR1)Nivel Low (interlock)(0 V DC o entrada abierta)
otra posición
Con una orden de maniobra en sentido CERRAR se emite la señal “Interlock Bypass” (no hay ha-bilitación).
1)
Comportamiento deEMERGENCIA
Para el comportamiento de EMERGENCIA de la función by-pass tienen validez lasmismas propiedades que para la función <Comportamiento de EMERGENCIA> conlas siguientes diferencias:
En una situación de EMERGENCIA, los dos controles de actuador recibensimultáneamente la señal EMERGENCIA. Con esta señal se inicia una acción deEMERGENCIA especialmente definida para la función de by-pass. (Por tanto, en lafunción <Comportamiento de EMERGENCIA>, el parámetro Operación EMERG.M0204 no está disponible).
Desarrollo de la acción de EMERGENCIA
1. Primero se abre la válvula by-pass.2. Cuando la válvula by-pass está completamente abierta, se cierra la válvula
principal.3. Una vez que está cerrada la válvula principal, se cierra la válvula by-pass.
Configuración de las entradas digitales
Nivel de usuario necesario: Especialista (4) o superior.
65
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Utilizar entrada DIN5 para señal Bypass Sync In :
Utilizar entrada DIN6 para señal EMERGENCIA :
Valores de ajuste:
● Señal DIN 5 M0122 = Bypass Sync In(Nombre en el diagrama de cableado: BYPASS SYNC IN)
● Señal DIN 6 M0121 = EMERGENCIA(Nombre en el diagrama de cableado: EMERGENCIA/EMERGENCY)
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 6 M0128) es la entrada High active o Low active.El ajuste por defecto es High active.
Configuración de la salida digital
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Interface I/O M0139Salidas digitales M0110
Ejemplo Utilizar salida DOUT6 para señal Bypass Sync Out :Parámetro: Señal DOUT 6 M0111Valor de ajuste: Bypass Sync Out (Nombre en el diagrama de cableado: BYPASSSYNC OUT)
8.7.1. Activar la función de by-pass
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Función Bypass M0941
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función de by-pass desactivada.
Función activa Función de by-pass activada.
8.7.2. Configurar la aplicación de by-pass
Los actuadores para ambas válvulas se deben configurar de acuerdo a su aplicación(válvula principal o válvula by-pass).
Ajustes del cliente M0041Función Bypass M0942Aplicación by-pass M0943
Valor por defecto: Válv. principalValores de ajuste:
Válv. principal Actuador para válvula principal.
Válv. by-pass Actuador para válvula principal.
8.8. Lift Plug Valve (LPV)
Aplicación Una «Lift Plug Valve» es una válvula especial que, para abrir o cerrar su elementode cierre, éste se debe «sacar» primero de un alojamiento o un bloqueo antes deque se pueda girar. De este modo se puede realizar un bloqueo de la válvula y/o
66
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
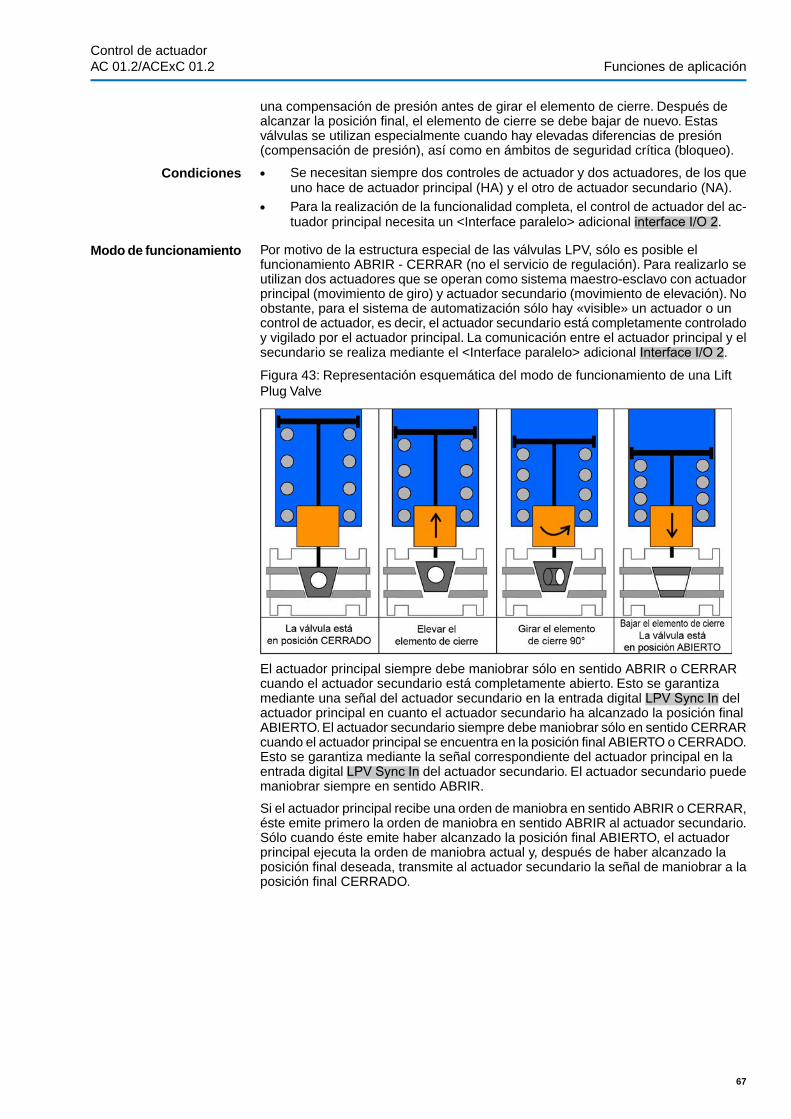
una compensación de presión antes de girar el elemento de cierre. Después dealcanzar la posición final, el elemento de cierre se debe bajar de nuevo. Estasválvulas se utilizan especialmente cuando hay elevadas diferencias de presión(compensación de presión), así como en ámbitos de seguridad crítica (bloqueo).
Condiciones ● Se necesitan siempre dos controles de actuador y dos actuadores, de los queuno hace de actuador principal (HA) y el otro de actuador secundario (NA).
● Para la realización de la funcionalidad completa, el control de actuador del ac-tuador principal necesita un <Interface paralelo> adicional interface I/O 2.
Modo de funcionamiento Por motivo de la estructura especial de las válvulas LPV, sólo es posible elfuncionamiento ABRIR - CERRAR (no el servicio de regulación). Para realizarlo seutilizan dos actuadores que se operan como sistema maestro-esclavo con actuadorprincipal (movimiento de giro) y actuador secundario (movimiento de elevación). Noobstante, para el sistema de automatización sólo hay «visible» un actuador o uncontrol de actuador, es decir, el actuador secundario está completamente controladoy vigilado por el actuador principal. La comunicación entre el actuador principal y elsecundario se realiza mediante el <Interface paralelo> adicional Interface I/O 2.
Figura 43: Representación esquemática del modo de funcionamiento de una LiftPlug Valve
El actuador principal siempre debe maniobrar sólo en sentido ABRIR o CERRARcuando el actuador secundario está completamente abierto. Esto se garantizamediante una señal del actuador secundario en la entrada digital LPV Sync In delactuador principal en cuanto el actuador secundario ha alcanzado la posición finalABIERTO. El actuador secundario siempre debe maniobrar sólo en sentido CERRARcuando el actuador principal se encuentra en la posición final ABIERTO o CERRADO.Esto se garantiza mediante la señal correspondiente del actuador principal en laentrada digital LPV Sync In del actuador secundario. El actuador secundario puedemaniobrar siempre en sentido ABRIR.
Si el actuador principal recibe una orden de maniobra en sentido ABRIR o CERRAR,éste emite primero la orden de maniobra en sentido ABRIR al actuador secundario.Sólo cuando éste emite haber alcanzado la posición final ABIERTO, el actuadorprincipal ejecuta la orden de maniobra actual y, después de haber alcanzado laposición final deseada, transmite al actuador secundario la señal de maniobrar a laposición final CERRADO.
67
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
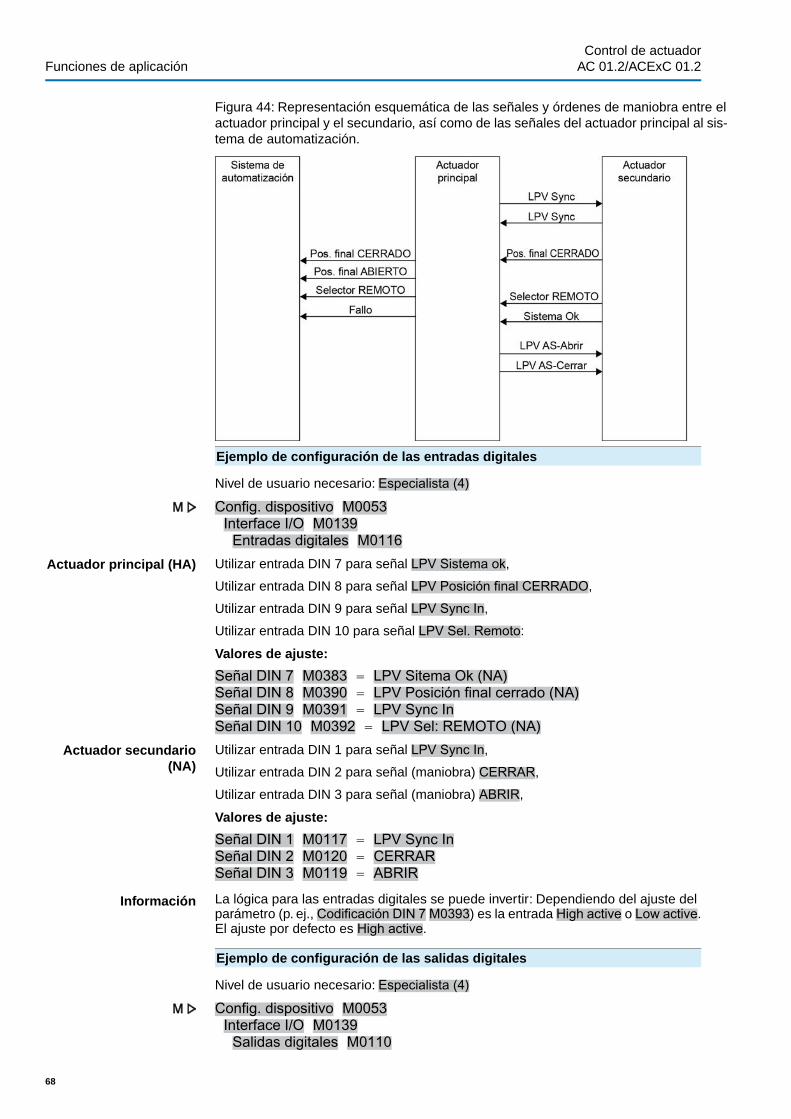
Figura 44: Representación esquemática de las señales y órdenes de maniobra entre elactuador principal y el secundario, así como de las señales del actuador principal al sis-tema de automatización.
Ejemplo de configuración de las entradas digitales
Nivel de usuario necesario: Especialista (4)
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Actuador principal (HA) Utilizar entrada DIN 7 para señal LPV Sistema ok,
Utilizar entrada DIN 8 para señal LPV Posición final CERRADO,
Utilizar entrada DIN 9 para señal LPV Sync In,
Utilizar entrada DIN 10 para señal LPV Sel. Remoto:
Valores de ajuste:
Señal DIN 7 M0383 = LPV Sitema Ok (NA)Señal DIN 8 M0390 = LPV Posición final cerrado (NA)Señal DIN 9 M0391 = LPV Sync InSeñal DIN 10 M0392 = LPV Sel: REMOTO (NA)
Actuador secundario(NA)
Utilizar entrada DIN 1 para señal LPV Sync In,
Utilizar entrada DIN 2 para señal (maniobra) CERRAR,
Utilizar entrada DIN 3 para señal (maniobra) ABRIR,
Valores de ajuste:
Señal DIN 1 M0117 = LPV Sync InSeñal DIN 2 M0120 = CERRARSeñal DIN 3 M0119 = ABRIR
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 7 M0393) es la entrada High active o Low active.El ajuste por defecto es High active.
Ejemplo de configuración de las salidas digitales
Nivel de usuario necesario: Especialista (4)
Config. dispositivo M0053Interface I/O M0139Salidas digitales M0110
68
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
Actuador principal (HA) Se presentan sólo las salidas para el control del actuador secundario, las salidas alsistema de automatización están preasignadas de forma estándar (p. ej., Pos.finalCERRADO, Pos.final ABIERTO, Selector en REMOTO, Fallo (Cfg))Utilizar salida DOUT 8 para señal LPV NA-ZU,
Utilizar salida DOUT 9 para señal LPV NA-AUF,
Utilizar salida DOUT 10 para señal LPV Sync Out,Valores de ajuste:
Señal DOUT 8 M0398 = LPV marcha CERRAR (NA)Señal DOUT 9 M0399 = LPV marcha ABRIR (NA)Señal DOUT 10 M0400 = LPV Sync Out
Actuador secundario(NA)
Utilizar salida DOUT 1 para señal Sistema Ok,
Utilizar salida DOUT 2 para señal Pos.final CERRADO,
Utilizar salida DOUT 3 para señal LPV Sync Out,Utilizar salida DOUT 4 para señal Selector REMOTO,
Valores de ajuste:
Señal DOUT 1 M0109 = Sistema OkSeñal DOUT 2 M0115 = Pos.final CERRADOSeñal DOUT 3 M0114 = LPV Sync OutSeñal DOUT 4 M0113 = Selector en REMOTO
Información La lógica para las salidas digitales se puede invertir. Dependiendo del ajuste delparámetro (p. ej., Codificación DOUT 1M0102) es la salida High active o Low active.El ajuste por defecto es High active.
8.8.1. Activar la función LPV
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Función LPV M1087
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función desactivada.
Función activa Función activada.
8.8.2. Configurar el tipo de actuador de la LPV
Nivel de usuario necesario: Especialista (4) o superior.
Cuando se utiliza la función LPV, en cada control de actuador se debe definir si éstecontrola el actuador principal o el secundario.
Ajustes del cliente M0041Lift Plug Valve M1089Selec. act. princ/sec M1090
Valor por defecto: HA Actuador princip/giroValores de ajuste:
HA Actuador princip/giro El control de actuador del actuador es como actuador principal el responsable delgiro del elemento de cierre.
NA Actuador secunda-rio/carrera
El control de actuador del actuador es como actuador secundario el responsable dela carrera del elemento de cierre.
69
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
8.8.3. Configurar el tiempo de retardo del actuador principal de la LPV
Configurar el tiempo de retardo para la maniobra en sentido ABRIR
En la posición final CERRADO del actuador principal se puede definir un tiempo deretardo para la maniobra en sentido ABRIR. Cuando se alcanza la posición finalABIERTO del actuador secundario, se retrasa el proceso siguiente de apertura dela válvula en este tiempo antes de que el actuador principal empiece a maniobraren sentido ABRIR.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Lift Plug Valve M1089Delay HA sentido ABRIR M1091
Valor por defecto: 02:00,0Rangos de ajuste: 00:00,0 ... 15:00,0 min:s (minutos:segundos)
Configurar el tiempo de retardo para la maniobra en sentido CERRAR
En la posición final ABIERTO del actuador principal se puede definir un tiempo deretardo para la maniobra en sentido CERRAR. Cuando se alcanza la posición finalABIERTO del actuador secundario, se retrasa el proceso siguiente de cierre de laválvula en este tiempo antes de que el actuador principal empiece a maniobrar ensentido CERRAR.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Lift Plug Valve M1089Delay HA sentido CERRAR M1092
Valor por defecto: 0:00,0Rangos de ajuste: 00:00,0 ... 15:00,0 min:s (minutos:segundos)
8.8.4. Configurar el tiempo de retardo del actuador secundario de la LPV
En las posiciones finales ABIERTO y CERRADO del actuador principal se puededefinir un tiempo de retardo para la maniobra en sentido CERRAR del actuadorsecundario. Cuando se alcanza la posición final ABIERTO o CERRADO del actuadorprincipal, se retrasa el proceso siguiente de apertura o cierre de la válvula en estetiempo antes de que el actuador secundario empiece a maniobrar en sentidoCERRAR.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Lift Plug Valve M1089Delay NA sentido CERRAR M1093
Valor por defecto: 0:00,0Rangos de ajuste: 00:00,0 ... 15:00,0 min:s (minutos:segundos)
8.9. Sistema automático de lavado
Condiciones Condición para esta función es uno de los siguientes equipamientos:
● Unidad de mando electrónica● Transmisor electrónico de posición EWG/RWGEsta función NO se puede combinar con las siguientes funciones:
● Lift Plug Valve● Función de by-pass● Perfil de actuación● Cuando en el posicionador se ha limitado el rango de operación (parámetro
Limit rango operación M0845 = Función activa)
70
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
Arranque repentino del actuador.
Cuando se utiliza el sistema automático de lavado con evaluación de comandocontrolada por nivel y se intenta solucionar un fallo de par a dos lados (los fallos depar en sentido ABRIR y CERRAR se presentan simultáneamente), puede producirseun arranque repentino del actuador en el sentido no esperado.
→ Utilice el sistema automático de lavado sólo en combinación con evaluación decomando controlada por flancos (parámetro Eval. orden REMOTO M1709).
Propiedades Si se produce una desconexión por limitador de par en la posición intermedia (esdecir, antes de alcanzar la posición final), el actuador intenta ejecutarautomáticamente de nuevo la orden de maniobra propiamente dicha a la posiciónfinal mediante una maniobra en el sentido opuesto.
Mientras se ejecuta el sistema automático de lavado, la señal de fallo de par sesuprime. Sólo cuando se vuelve a producir un fallo de par tras la secuencia de lavadoajustada, el actuador se desconecta y el control de actuador emite un fallo de par.
8.9.1. Activar la función Sistema automático de lavado
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Automático de lavado M1678
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función desactivada.
Función activa Función activada.
8.9.2. Ajustar el tiempo de maniobra para la maniobra en sentido opuesto
El control de actuador memoriza la 1. posición de desconexión y maniobra el actuadoren sentido opuesto durante el tiempo de maniobra ajustado aquí.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Automático de lavado M1680Tpo deplaz. sentido contr. M1681
Valor por defecto: 3 sRangos de ajuste: 1 ... 60 s (segundos)
8.9.3. Ajustar el número de intentos de lavado
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Automático de lavado M1680Intentos de lavado M1682
Valor por defecto: 3Rangos de ajuste: 1 ... 5
8.9.4. Ajustar el rango de tolerancia
Rango de tolerancia (+/–) para la posición de desconexión por limitador de paroriginal dentro del cual se emite un fallo de par después de un proceso de lavadosin éxito.
Nivel de usuario necesario: Especialista (4) o superior.
71
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
Ajustes del cliente M0041Automático de lavado M1680Rango de tolerancia M1683
Valor por defecto: 10 %Rangos de ajuste: 5 ... 30% (porcentaje del tiempo de maniobra en sentido opuesto)
8.10. Sistema de calefacción y calefacciones
Componentes posibles:
● Sistema de calefacción en el control● Calefacciones en el actuador:
- Calefacción de la unidad de mando (en el recinto de interruptores)- Calefacción del motor (en la carcasa del motor)
8.10.1. Sistema de calefacción en el control
El sistema de calefacción se suele utilizar con bajas temperaturas (en el modelo debaja temperatura, hasta –60 °C). Si hay un sistema de calefacción instalado, lasotras calefacciones (unidad de mando, calefacción del motor) se conectan tambiénal sistema de calefacción.
Nombre en el diagrama de cableado: R5 H
Identificación de las variantes en la clave del diagrama de cableado (11. posición):
● B = 115 V AC o 230 V AC alimentación externa● C, E, H = alimentación interna mediante el control de actuadorEl sistema de calefacción tiene regulación de temperatura. El sistema de calefacciónse conecta en un rango de temperatura de –5 °C a –10 °C y garantiza que latemperatura en la carcasa del control no baje de –20 °C.
8.10.2. Calefacción de la unidad de mando (actuador)
Propiedades Para los actuadores AUMA con el control de actuador AC, en la unidad de mando(en el recinto de interruptores del actuador) se ha instalado una calefacción deresistencia.
La calefacción reduce la formación de condensados en el recinto de interruptoresdel actuador.
Nombre en el diagrama de cableado: R1 H
Identificación en la clave del diagrama de cableado: 11. Posición = A – H
Información El funcionamiento de la calefacción se puede vigilar. Para más información, véaseel capítulo <Vigilancia del sistema de calefacción/calefacción>.
Conectar/desconectar la calefacción de la unidad de mando
La calefacción de la unidad de mando del actuador se puede conectar/desconectar.La conexión o la desconexión pueden tener lugar de forma permanente, oautomáticamente cuando se superan o no se alcanzan valores de temperaturaestablecidos. Para el ajuste automático se necesita una unidad de mando electrónica(MWG).
Información Cuando la calefacción está desconectada, no se realiza vigilancia de calefacción(parámetro Vigilancia calefacción).
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Actuador M0168Calefacción unidad mando M1338
Valor por defecto: Auto
72
Control de actuadorFunciones de aplicación AC 01.2/ACExC 01.2
Valores de ajuste:
Off La calefacción está desconectada.
On La calefacción está conectada.
Auto El control de actuador conecta/desconecta automáticamente la calefacción:
● Cuando se superan los +40 °C en el recinto de interruptores = off● Cuando no se alcanzan los +35 °C en el recinto de interruptores = on
8.10.3. Calefacción del motor
La calefacción del motor evita la formación de agua de condensación y mejora elcomportamiento de arranque a temperaturas extremadamente bajas.
Nombre en el diagrama de cableado: R4 H
Identificación en la clave del diagrama de cableado: 11. posición = D (alimentaciónexterna de la calefacción del motor), G (alimentación interna de la calefacción delmotor)
73
Control de actuadorAC 01.2/ACExC 01.2 Funciones de aplicación
9. Funciones de seguridad
Definición Las funciones de seguridad se activan por motivo de determinados eventos yprovocan una acción definida del control o del actuador. La activación de una acciónde seguridad puede tener origen manual (por ejemplo, oprimiendo un interruptor deparo de EMERGENCIA). Por lo general, una acción de seguridad es activadaautomáticamente por una señal de fallo de una función de vigilancia (por ejemplo,en caso de pérdida de señal).
9.1. Tiempo de bloqueo de inversión
Aplicación Para evitar estados operativos inadmisibles, como por ejemplo: Orden de maniobraen sentido ABRIR, pero el actuador maniobra aún en sentido CERRAR por motivodel tiempo de post-recorrido.
Propiedades El tiempo previo de inversión (tiempo de pausa entre dos órdenes de maniobra ensentido contrario) impide que, tras la desconexión del motor, éste arranque de nuevoen sentido contrario durante un tiempo definido.
Parámetros e indicaciones para el ajuste
Nivel de usuario necesario: AUMA (6).
Config. dispositivo M0053Disp. maniobra motor M0173Tiempo prev.inversión M0174
Valores por defecto: Con motores de corriente trifásica = 1,0 s segundo
Con motores de corriente alterna = 2,5 s segundos
Rango de ajuste: 0,3 ... 30,0 s segundos
9.2. Comportamiento en fallo en caso de pérdida de señal
Propiedades Mediante el comportamiento en fallo se puede establecer cómo debe reaccionar elAC en caso de pérdida de una señal o de que la señal sea defectuosa.
En el modo de operación Remoto, el comportamiento en fallo reacciona sólo al fallode una señal. En el modo de operación Local u Off, no hay reacción.
9.2.1. Comportamiento de activación en caso de pérdida de señal
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. en fallo M0378Comport. en fallo M0379
Valor por defecto: Señal buena antesValores de ajuste:
Señal buena antes El <Comportamiento en fallo> sólo se activa cuando se pierde la señal vigilada(flanco de señal descendente).
Con este ajuste se asegura que, cuando falte la señal, el actuador no arranque deinmediato al conectarlo (señal buena antes).
Activo inmediato El <Comportamiento en fallo> se activa de inmediato cuando falta la señal vigilada(no llega).
74
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
Con el ajuste Activo inmediato:
¡El actuador puede arrancar de inmediato al conectarlo!
Posibilidad de daños personales o daños en la válvula.
→ Asegúrese de que la señal ajustada bajo el parámetro Origen del fallo M0385llega al conectar.
→ Si el actuador arranca inesperadamente: ponga inmediatamente el selector enla posición Operación local (LOCAL) o 0 (OFF).
9.2.2. Ajustar el origen del fallo (motivo del fallo) para una maniobra de fallo
Ajustes del cliente M0041Comport. en fallo M0378Origen del fallo M0385
Valor por defecto: Interface I/OValores de ajuste:
Interface I/O En caso de fallo de setpoints (setpoint de posición, setpoint de procesos, valor realde procesos), se activa el comportamiento en fallo.
La vigilancia depende del rango de setpoints ajustado, p. ej.:
● Setpoint = 4 – 20 mA, E1 menor de 3,7 mA = Pérdida de señal● Setpoint = 10 – 20 mA, E1 menor de 9,7 mA = Pérdida de señal
Información ● En un rango de setpoint de 0 – 20 mA no es posible la vigilancia.● El control de actuador reacciona sólo al fallo de una señal de setpoint cuando
a la entrada MODE llega una señal, es decir, que el control de actuador seencuentra en el modo de operación REMOTO Setpoint (control de setpoint).
9.2.3. Operación en fallo (reacción del actuador) en caso de pérdida de señal
Mediante la operación en fallo se establece qué acción debe realizar el actuadorcuando se activa el comportamiento en fallo.
Ajustes del cliente M0041Comport. en fallo M0378Operación en fallo M0384
Valor por defecto: PAROValores de ajuste:
PARO El actuador se para en la posición actual.
CERRAR El actuador maniobra hacia la posición final CERRADO.
ABRIR El actuador maniobra hacia la posición final ABIERTO.
Alcanzar posición El actuador maniobra hacia una posición predeterminada. Condiciones:
● La función <Posicionador> está activada.● El parámetro Origen del fallo M0385 está ajustado a Interface I/O
Ejec. última orden El actuador ejecuta la última orden de maniobra y se para entonces.
Si la última orden de maniobra ha sido una especificación de setpoint mediante unaentrada analógica (AIN 1/AIN 2), el valor inferior del setpoint de posicióncorrespondiente se utiliza como «última orden de maniobra» (parámetro Límiteinferior AIN 1/Límite inferior AIN 2). El actuador maniobra entonces a la posiciónfinal prevista para ello, que suele ser la posición final CERRADO.
Comportamiento según la posición del selector
Si se ha activado el comportamiento en fallo, se maniobra a la posición especificada.Si después se maniobra el actuador a otra posición (p. ej., mediante el mando
75
Control de actuadorAC 01.2/ACExC 01.2 Funciones de seguridad
manual), intentará ejecutar la operación en fallo ajustada mientras el selector estéen la posición Operación remota (REMOTO).
Información Para impedir que durante la operación con el volante se produzca una nueva manio-bra a la posición de seguridad, el selector se debe colocar en la posición Operaciónlocal (LOCAL) o 0 (OFF), antes de manejar el volante.
9.2.4. Establecer la posición de seguridad
Si la operación en fallo Alcanzar posición está ajustada, el actuador maniobra a laposición de seguridad aquí indicada.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. en fallo M0378Posición de seguridad ABRIR CERRAR M0387
Valor por defecto: 50,0 %Rango de ajuste: 0,0 ... 100,0 % (de posición final ABIERTO a posición finalCERRADO)
9.2.5. Establecer la posición de seguridad de la MPV
Este parámetro está sólo disponible en la versión Multiport Valve.
Si la operación en fallo Alcanzar posición está ajustada, el actuador maniobra a laposición de seguridad aquí indicada.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. en fallo M0378Pos. seguridad MPV M1172
Valor por defecto: 0.0°Rango de ajuste: 0.0 ... 360°
9.2.6. Ajustar el tiempo de retardo
Una acción de seguridad se ejecuta sólo después de haber transcurrido el tiempode retardo. De este modo se puede evitar que un fallo de corta duración de unaseñal, que no tendrá efectos para el proceso, provoque una acción de seguridadinmediata.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. en fallo M0378Tiempo de retardo M0386
Valor por defecto: 00:03,0 min:s (3 segundos)
Rango de ajuste: 0,0 ... 30:00,0 min:s (30 minutos)
9.3. Comportamiento de EMERGENCIA
Aplicación Mediante el comportamiento de EMERGENCIA se puede establecer cómo se debecomportar el actuador, p. ej., en una situación de emergencia.
Propiedades ● La función <Comportamiento de EMERGENCIA> se activa mediante la señalEMERGENCIA.
● El actuador ejecuta una operación de EMERGENCIA definida. Por ejemplo,maniobra a una posición de EMERGENCIA predeterminada (p. ej., posiciónfinal ABIERTO o posición final CERRADO).
● Mientras la señal EMERGENCIA siga presente, el actuador no reacciona aotras órdenes de maniobra (la señal EMERGENCIA tiene la máxima prioridad).
76
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
● Una vez activado el comportamiento de EMERGENCIA, las órdenes de manio-bra binarias (mediante entradas digitales) se deben transmitir de nuevo.
● Las órdenes de maniobra analógicas (p. ej., 0/4 – 20 mA) se ejecutan de nuevoinmediatamente.
Condición Para la función Comportamiento de EMERGENCIA debe haber configurada unaentrada digital para la señal EMERGENCIA .
Configuración de la entrada digital
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Utilizar entrada DIN4 para señal EMERGENCIA :
Parámetro: Señal DIN 4 M0118Valor de ajuste: EMERGENCIA (Nombre en el diagrama de cableado:EMERGENCIA)
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 4 M0126) es la entrada High active o Low active.Por motivos de seguridad, la entrada para la señal EMERGENCIA se suele ajustarLow active .
Ejecutar la operación de EMERGENCIA mediante entrada digital
Comportamiento de conmutación en la codificación Low active:● Entrada EMERGENCIA = nivel Low (0 V DC o entrada abierta)
Se dispara la operación de EMERGENCIA● Entrada EMERGENCIA = nivel High (estándar: +24 V DC)
Sin operación de EMERGENCIA
9.3.1. Activar el comportamiento de EMERGENCIA
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Comp. EMERGENCIA M0589
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Comportamiento de EMERGENCIA> desactivada.
Función activa Función <Comportamiento de EMERGENCIA> activada.
Con el comportamiento de EMERGENCIA activado:
El actuador puede arrancar por motivo de una señal de EMERGENCIA.
Posibilidad de daños personales o daños en la válvula.
→ Durante la puesta en servicio y los trabajos de mantenimiento: Ponga el selectoren la posición 0 (OFF). El control del motor sólo se puede interrumpir con elselector en esta posición.
→ Si el actuador arranca inesperadamente: ponga inmediatamente el selector enla posición 0 (OFF).
77
Control de actuadorAC 01.2/ACExC 01.2 Funciones de seguridad
Información El comportamiento de EMERGENCIA debe estar completamente configurado durantela primera activación. Es decir, el ajuste de los parámetros, especialmente de lossiguientes, se debe adaptar al comportamiento solicitado del actuador: Comporta-miento de activación EMERG. Origen fallo EMERG. Modo oper. EMERGENC.Operación EMERG. Posición EMERGENC.
9.3.2. Comportamiento de activación de EMERGENCIA
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198Comportamiento de activación EMERG. M0203
Valor por defecto: Señal buena antesValores de ajuste:
Señal buena antes El <Comportamiento de EMERGENCIA> se activa cuando la señal EMERGENCIAcambia de High a Low. Ejemplo: con una entrada binaria de EMERGENCIA de+24 V DC a 0 V. Con esto se evita que cuando se conecte el control de actuador yfalte la señal EMERGENCIA se active de inmediato el <Comportamiento deEMERGENCIA>.
Activo inmediato El <Comportamiento de EMERGENCIA> se activa cuando el nivel en la señalEMERGENCIA es Low. Con este ajuste, la señal EMERGENCIA debe tener un nivelHigh antes de conectar el control de actuador, pues de otro modo se activa el<Comportamiento de EMERGENCIA> inmediatamente después de conectar.
Con el ajuste Activo inmediato:
¡El actuador puede arrancar de inmediato al conectarlo!
Posibilidad de daños personales o daños en la válvula.
→ Asegúrese de que la señal EMERGENCIA está presente al conectar.→ Si el actuador arranca inesperadamente: Ponga el selector en la posición 0
(OFF).
9.3.3. Ajustar el origen del fallo (motivo del fallo) para una operación de EMERGENCIA
Ajustes del cliente M0041Comport. EMERGENC. M0198Origen fallo EMERG. M0591
Valor por defecto: Interface I/OValores de ajuste:
Interface I/O Si deja de recibirse la señal EMERGENCIA, se activa el comportamiento deEMERGENCIA.
Interface activo Si falla el interface activo, se activa el comportamiento de EMERGENCIA. Es decir,que cuando cambia el origen de la orden, cambia también el origen del fallo para laseñal EMERGENCIA.
9.3.4. Modo de operación para comportamiento de EMERGENCIA
El comportamiento de EMERGENCIA se puede activar para los modos de operaciónRemoto y/o Local.
Ajustes del cliente M0041Comport. EMERGENC. M0198Modo oper. EMERGENC. M0202
Valor por defecto: Sólo REMOTO
78
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
Valores de ajuste:
Sólo REMOTO El comportamiento de EMERGENCIA está activo en los modos de operación:Remoto, Remoto II, Bus
REMOTO y LOCAL El comportamiento de EMERGENCIA está activo en los modos de operación:Remoto, Remoto II, Bus, Local, Servicio
Información En el modo de operación Off (selector en posición 0) no se ejecuta ningún compor-tamiento de EMERGENCIA.
9.3.5. Operación de EMERGENCIA
Mediante la operación de EMERGENCIA se establece qué acción debe realizar elactuador cuando se activa el comportamiento de EMERGENCIA.
Ajustes del cliente M0041Comport. EMERGENC. M0198Operación EMERG. M0204
Valor por defecto: PAROValores de ajuste:
PARO El actuador se para en la posición actual.
CERRAR El actuador maniobra hacia la posición final CERRADO.
ABRIR El actuador maniobra hacia la posición final ABIERTO.
Alcanzar pos.EMERG. El actuador maniobra hacia una posición predeterminada.
9.3.6. Posición de EMERGENCIA
Si la acción EMERGENCIA Alcanzar pos.EMERG. está ajustada, el actuadormaniobra a la posición de EMERGENCIA aquí indicada.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198Posición EMERGENC. M0232Valor por defecto: 0,0 %Rango de ajuste: 0,0 ... 100,0 % (de posición final ABIERTO a posición finalCERRADO)
9.3.7. Posición de EMERGENCIA de MPV
Este parámetro está visible en la variante del producto Multiport Valve y sustituyeal parámetro Posición de EMERGENCIA.
Si la acción EMERGENCIA Alcanzar pos.EMERG. está ajustada, el actuadormaniobra a la posición de EMERGENCIA aquí indicada.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198Pos. EMERGENCIA MPV M1171
Valor por defecto: 0.0°Rango de ajuste: 0.0° ... 360.0° (grados)
9.3.8. By-pass de limitadores de par
Si se activa una operación de EMERGENCIA, los limitadores de par se puedenpuentear en by-pass durante esta maniobra.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198
79
Control de actuadorAC 01.2/ACExC 01.2 Funciones de seguridad
By-pass par M0199Valor por defecto: Off
Valores de ajuste:
Off Sin by-pass del limitador de par.
On Las señales de los limitadores de par en el actuador se puentean en by-pass.
9.3.9. By-pass de protección de motor
Si se activa una operación de EMERGENCIA, la protección del motor se puedepuentear en by-pass durante esta maniobra.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198By-pass térmico M0200
Valor por defecto: OffValores de ajuste:
Off Sin by-pass de la protección del motor.
On Se puentean en by-pass las señales de los termostatos o termistores del devanadodel motor.
Información En los actuadores con protección anti-explosión no es posible el by-pass de la pro-tección del motor.
9.3.10. By-pass de temporizador
Si se activa una operación de EMERGENCIA, el temporizador se puede puentearen by-pass durante esta operación.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198By-pass temporizador M0201
Valor por defecto: OffValores de ajuste:
Off Sin by-pass del temporizador.
On Con by-pass del temporizador.
9.3.11. By-pass del perfil de actuación
Si se activa una operación de EMERGENCIA, el perfil de actuación (comportamientooperativo) ajustado se puede puentear en by-pass durante esta operación.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198By-pass perfil operac. M0596
Valor por defecto: OffValores de ajuste:
Off Sin by-pass del perfil de actuación.
On Con by-pass del perfil de actuación.
9.3.12. By-pass de interlock
Cuando la función Interlock está activada, esta función se puede puentear en by-passdurante una operación de EMERGENCIA para impedir que la operación deEMERGENCIA requiera una orden de habilitación.
80
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198By-pass Enclav. M0668
Valor por defecto: OffValores de ajuste:
Off El by-pass está desactivado. La función Interlock está activa también durante laoperación de EMERGENCIA.
On El by-pass está activado. La función Interlock está desactivada durante la operaciónde EMERGENCIA.
9.3.13. By-pass de paro local
Cuando la función Paro local está activada, esta función se puede puentear enby-pass durante una operación de EMERGENCIA para impedir que la operación deEMERGENCIA se pueda ver interrumpida cuando se oprime el pulsador STOP.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198By-pass PARO local M0682
Valor por defecto: OffValores de ajuste:
Off El by-pass está desactivado. La función Paro local está activa también durante laoperación de EMERGENCIA.
On El by-pass está activado. La función Paro local está desactivada durante la operaciónde EMERGENCIA.
9.3.14. Ajustar el retardo para el comportamiento de EMERGENCIA
Una operación de EMERGENCIA se ejecuta sólo después de haber transcurrido eltiempo de retardo. De este modo se puede evitar que un fallo de corta duración deuna señal, que no tendrá efectos en el proceso, provoque una operación deEMERGENCIA inmediata.
Nivel de usuario necesario: AUMA (6) o superior.
Ajustes del cliente M0041Comport. EMERGENC. M0198Retardo M0804
Valor por defecto: 00:01,00 min : sRango de ajuste: 00:00,0 ... 30:00,0 min : s
9.4. Habilitación de los mandos locales
Aplicación ● Protección contra un manejo no autorizado de los mandos locales● Protección contra una parametrización no autorizada de los mandos locales
Propiedades La funciones del selector LOCAL y/u OFF se pueden habilitar o bloquear.
Condición Para la función de habilitación de los mandos locales debe haber configurada unaentrada digital para la señal Habilitar LOCAL.
Configuración de la entrada digital
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Utilizar entrada DIN 5 para señal Habilitar LOCAL :
81
Control de actuadorAC 01.2/ACExC 01.2 Funciones de seguridad
Parámetro: Señal DIN 5 M0122Valor de ajuste: Habilitar LOCAL (Nombre en el diagrama de cableado: Liberarmodo LOCAL)
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 5 M0127) es la entrada High active o Low active.El ajuste por defecto es High active.
Habilitar/bloquear los mandos locales mediante la entrada digital
Comportamiento de conmutación en la codificación High active:● Entrada Habilitar LOCAL = nivel High (estándar: +24 V DC):
Operación desde los mandos locales habilitada.● Entrada Habilitar LOCAL = nivel Low (0 V DC o entrada abierta):
Operación desde los mandos locales bloqueada.
9.4.1. Activar la función de habilitación
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Habilitar LOCAL M0631
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Habilitación de los mandos locales desde REMOTO> desactivada.
Función activa Función <Habilitación de los mandos locales desde REMOTO> activada.
9.4.2. Comportamiento de la función de habilitación
Con el comportamiento de habilitación se establece qué funciones del selector(LOCAL, OFF) requieren una señal de habilitación adicional.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Mandos locales M0075Habilitar LOCAL M0628
Valor por defecto: Selector localValores de ajuste:
Selector local El bloqueo o la habilitación sólo son efectivos en el modo de operación LOCAL (elselector se encuentra en la posición Operación local). Si no llega ninguna señalde habilitación, la operación mediante los pulsadores locales está bloqueada y enla pantalla se muestra el mensaje: Deshab..
Sel. local + off El bloqueo o la habilitación son efectivos en los modos de operación LOCAL y OFF(posiciones del selector Operación local y 0). Si no llega ninguna señal dehabilitación, la operación mediante los pulsadores locales está bloqueada y en lapantalla se muestra el mensaje: Deshab..
Información Si la función <Prioridad REMOTO> también está activada, ambas funciones debentener valores de ajuste diferentes. Si el valor de ajuste es el mismo, p. ej., Sel. local+ off, la función <Habilitación de los mandos locales> no tiene funcionalidad ya quecuando falta la señal de habilitación, el control de actuador se encuentra únicamenteen el modo de operación REMOTO.
9.5. Prioridad REMOTO
Propiedades Mediante una señal de mando se le puede dar al control desde REMOTO prioridadante la operación del actuador desde los mandos locales (independientemente dela posición del selector).
82
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
Esta función utiliza la misma señal de entrada que la función <Habilitación de losmandos locales>.
Aplicación No se puede conmutar mediante el selector LOCAL.
Condición Para la función <Prioridad REMOTO> debe haber configurada una entrada digitalpara la señal Habilitar LOCAL.
Configuración de la entrada digital
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Utilizar entrada DIN 5 para señal Habilitar LOCAL :
Parámetro: Señal DIN 5 M0122Valor de ajuste: Habilitar LOCAL (Nombre en el diagrama de cableado: Liberarmodo LOCAL)
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 5 M0127) es la entrada High active o Low active.El ajuste por defecto es High active.
Prioridad REMOTO mediante entrada digital
Comportamiento de conmutación en la codificación High active:● Entrada Habilitar LOCAL = nivel High (estándar: +24 V DC):
Operación desde los mandos locales habilitada.● Entrada Habilitar LOCAL = nivel Low (0 V DC o entrada abierta):
Prioridad REMOTO: Operación desde los mandos locales bloqueada.
9.5.1. Activar Prioridad REMOTO
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Prioridad REMOTO M0770
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Prioridad REMOTO> desconectada.
Función activa Función <Prioridad REMOTO> conectada.
9.5.2. Comportamiento de Prioridad REMOTO
Con esta función se establece qué función del selector (LOCAL, OFF) requiere unaseñal de habilitación adicional.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Mandos locales M0075Prioridad REMOTO M0773
Valor por defecto: Selector localValores de ajuste:
Selector local La prioridad para el control desde REMOTO sólo es efectiva en el modo de operaciónLOCAL (el selector se encuentra en la posición Operación local). Si no llega ningunaseñal de habilitación, la operación mediante los pulsadores locales está bloqueada,
83
Control de actuadorAC 01.2/ACExC 01.2 Funciones de seguridad
el actuador sólo se puede controlar desde REMOTO, el control muestra en la primeralínea de la pantalla (menú S0001) el símbolo .
Sel. local + off La prioridad para el control desde REMOTO es efectiva en los modos de operaciónLOCAL y OFF (posiciones del selector Operación local y 0). Si no llega ningunaseñal de habilitación, la operación mediante los pulsadores locales está bloqueada,el actuador sólo se puede controlar desde REMOTO, el control muestra en la primeralínea de la pantalla (menú S0001) el símbolo .
9.6. Interlock (habilitación de órdenes de maniobra)
Propiedades ● Una orden de maniobra se ejecuta sólo si llega una señal de habilitación adi-cional para la orden de maniobra.
● La habilitación para las órdenes de maniobra ABRIR y CERRAR se puede ac-tivar o desactivar por separado.
● La habilitación se puede ajustar para los distintos modos de operación.
Condición Para la función Interlock debe haber configuradas una y/o dos entradas digitalespara las señales Habilitar ABRIR o Habilitar CERRAR.
Configuración de la entrada digital
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Utilizar la entrada DIN 5 para habilitar órdenes de maniobra en sentido CERRAR:
Parámetro: Señal DIN 5 M0122Valor de ajuste: Habilitar CERRAR (Nombre en el diagrama de cableado:Interlock CERRAR)
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 5 M0127) es la entrada High active o Low active.El ajuste por defecto es High active.
Habilitar/bloquear órdenes de maniobra mediante entrada digital
Comportamiento de conmutación en la codificación High active:● Entrada Habilitar ABRIR o Habilitar CERRAR = nivel Low (0 V DC o entrada
abierta):Orden de maniobra habilitada.
● Entrada Habilitar ABRIR o Habilitar CERRAR = nivel High (estándar: +24 VDC):Orden de maniobra bloqueada.
9.6.1. Activar Interlock
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Enclavamiento M0663Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Interlock (habilitación de órdenes de maniobra)> desactivada.
Función activa Función <Interlock (habilitación de órdenes de maniobra)> activada.
84
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
9.6.2. Ajustar el origen de fallo para la señal de habilitación de Interlock
Ajustes del cliente M0041Enclavamiento M0664Fuente activación Interlock M1013
Valor por defecto: Fuente activa de órdenesValores de ajuste:
Fuente activa de órdenes La señal para la habilitación de las órdenes de maniobra se realiza mediante elinterface activo. Es decir, que cuando cambia el origen de la orden, cambia tambiénel origen del fallo para la señal de habilitación.
Interface La señal para la habilitación de las órdenes de maniobra debe estar configuradacomo señal binaria (estándar: +24 V DC) en una entrada digital. (Parámetro:HabilitarABRIR / Habilitar CERRAR)
9.6.3. Modo de operación para Interlock
La señal de habilitación adicional se puede activar para distintos modos de operación.
Ajustes del cliente M0041Enclavamiento M0664Modo op. Enclavam. M0665Valor por defecto: OFF ambos sentidos
Valores de ajuste:
OFF Interlock desactivado.
REMOTO Interlock está activo en los modos de operación: Remoto, Remoto II, BusLOCAL Interlock está activo en los modos de operación: Local, Servicio
REMOTO+LOCAL Interlock está activo en los modos de operación: Remoto, Remoto II, Bus, Local,Servicio
9.6.4. Comportamiento de Interlock (sentido de maniobra)
Con Interlock se establece qué órdenes de maniobra (ABRIR, CERRAR) requierenuna señal de habilitación adicional.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Enclavamiento M0664Sent.marcha Enclavam. M0666Valor por defecto: ABRIR + CERRARValores de ajuste:
ABRIR La señal de habilitación es necesaria sólo para órdenes de maniobra en sentidoABRIR.
CERRAR La señal de habilitación es necesaria sólo para órdenes de maniobra en sentidoCERRAR.
ABRIR + CERRAR La señal de habilitación es necesaria para órdenes de maniobra en sentido ABRIRy en sentido CERRAR.
9.7. Paro local
Propiedades ● Con la función Paro local se puede parar localmente una maniobra de Remotocon el pulsador STOP.
● Todas las órdenes de maniobra se interrumpen.
Información Cuando se suelta el pulsador STOP, una eventual orden de maniobra que sea aúnactual se activa inmediatamente de nuevo.
85
Control de actuadorAC 01.2/ACExC 01.2 Funciones de seguridad
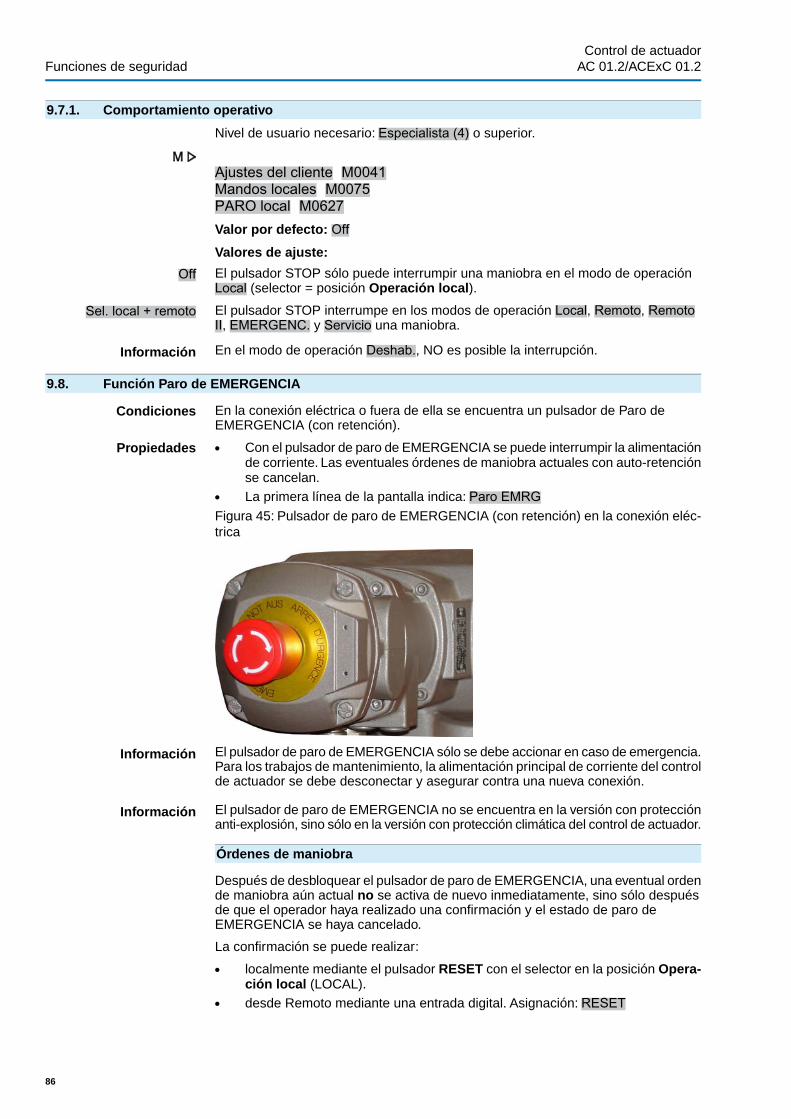
9.7.1. Comportamiento operativo
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Mandos locales M0075PARO local M0627Valor por defecto: OffValores de ajuste:
Off El pulsador STOP sólo puede interrumpir una maniobra en el modo de operaciónLocal (selector = posición Operación local).
Sel. local + remoto El pulsador STOP interrumpe en los modos de operación Local, Remoto, RemotoII, EMERGENC. y Servicio una maniobra.
Información En el modo de operación Deshab., NO es posible la interrupción.
9.8. Función Paro de EMERGENCIA
Condiciones En la conexión eléctrica o fuera de ella se encuentra un pulsador de Paro deEMERGENCIA (con retención).
Propiedades ● Con el pulsador de paro de EMERGENCIA se puede interrumpir la alimentaciónde corriente. Las eventuales órdenes de maniobra actuales con auto-retenciónse cancelan.
● La primera línea de la pantalla indica: Paro EMRGFigura 45: Pulsador de paro de EMERGENCIA (con retención) en la conexión eléc-trica
Información El pulsador de paro de EMERGENCIA sólo se debe accionar en caso de emergencia.Para los trabajos de mantenimiento, la alimentación principal de corriente del controlde actuador se debe desconectar y asegurar contra una nueva conexión.
Información El pulsador de paro de EMERGENCIA no se encuentra en la versión con protecciónanti-explosión, sino sólo en la versión con protección climática del control de actuador.
Órdenes de maniobra
Después de desbloquear el pulsador de paro de EMERGENCIA, una eventual ordende maniobra aún actual no se activa de nuevo inmediatamente, sino sólo despuésde que el operador haya realizado una confirmación y el estado de paro deEMERGENCIA se haya cancelado.
La confirmación se puede realizar:
● localmente mediante el pulsador RESET con el selector en la posición Opera-ción local (LOCAL).
● desde Remoto mediante una entrada digital. Asignación: RESET
86
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
9.9. Partial Valve Stroke Test (PVST)
Propiedades El Partial Valve Stroke Test (PVST) sirve para comprobar el funcionamiento delcontrol de actuador y del actuador. Durante este test se comprueba la movilidad dela válvula mediante apertura y cierre parciales dentro de un tiempo ajustado y sindetener el proceso. Pasado con éxito el test, el control de actuador opera de nuevoel actuador de vuelta a la posición inicial.
Si el test no se supera con éxito, el control de actuador genera las siguientes señales:Fallo PVST Cancel PVST. Para vigilar el PVST, estas señales deben ser evaluadaspor un PLC.
Condiciones ● Transmisor electrónico de posición en el actuador● Si el actuador se encuentra en un estado seguro (activado por la operación de
fallo), el test no se realiza.● El test se puede realizar con el control ABRIR - CERRAR. Con el control de
setpoint (servicio de regulación) no se puede realizar el test.Para la función PVST debe haber configurada una entrada digital para la señalEjecutar PVST.
Configuración de la entrada digital
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Utilizar entrada DIN4 para señal Ejecutar PVST :
Parámetro: Señal DIN 4 M0118Valor de ajuste: Ejecutar PVST (Nombre en el diagrama de cableado: ESD)
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 4 M0126) es la entrada High active o Low active.Por motivos de seguridad, la entrada para la señal Ejecutar PVST se suele ajustarLow active.
Ejecutar PVST mediante entrada digital
Comportamiento de conmutación en la codificación Low active:● Entrada Ejecutar PVST = nivel Low (0 V DC o entrada abierta)
Sin test● Entrada Ejecutar PVST = nivel High (estándar: +24 V DC)
Se activa el test
Ejecutar el PVST manualmente mediante los pulsadores de los mandos locales
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones de servicio M0222Ejecutar PVST M0850
El actuador se debe encontrar en la posición inicial. La posición inicial depende delajuste de los siguientes parámetros. Comport. PVST M0853, Carr PVST M0854
Información El PVST se puede cancelar enviando una orden de reset:● Localmente (manualmente) con el selector en posición Operación local me-
diante el pulsador RESET.● Desde remoto, con el selector en posición Operación remota mediante una
entrada digital. Asignación: RESET
9.9.1. Activar el PVST
Nivel de usuario necesario: Especialista (4) o superior.
87
Control de actuadorAC 01.2/ACExC 01.2 Funciones de seguridad
Config. dispositivo M0053Funciones aplicación M0178Activación M0212PVST M0851
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <PVST> desactivada.
Función activa Función <PVST> activada.
9.9.2. Ajustar el origen de fallo para el PVST
Ajustes del cliente M0041PVST M0852Origen fallo PVST M1339
Valor por defecto: Interface activoValores de ajuste:
Interface activo La señal para activar un PVST se realiza mediante el interface activo. Es decir, quecuando cambia el origen de la orden, cambia también el origen del fallo para unPVST.
Interface I/O La señal para activar un PVST debe estar configurada como señal binaria (estándar:+24 V DC) en una entrada digital.
9.9.3. Modo de operación para el PVST
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041PVST M0852Modo oper. PVST M0889
Valor por defecto: CarrValores de ajuste:
Carr PVST controlado por carrera; maniobra en una carrera definida (parámetro CarrPVST) dentro de un tiempo predeterminado (parámetro Vigilancia PVST). En estemodo de operación se puede iniciar el PVST en cualquier posición de la válvula(también fuera de la posición final).
Comprobación posición fi-nal
PVST controlado por tiempo de maniobra; maniobra durante un tiempo definido(parámetro Tiempo man. PVST) tras salir de la posición final. En este modo deoperación, el PVST se puede iniciar sólo desde las posiciones finales.
9.9.4. Establecer el comportamiento operativo del PVST
El test se puede realizar en sentido ABRIR o en sentido CERRAR.
Ajustes del cliente M0041PVST M0852Comport. PVST M0853
Valor por defecto: ABRIRValores de ajuste:
ABRIR Test con maniobra en sentido ABRIR.
CERRAR Test con maniobra en sentido CERRAR.
9.9.5. Ajustar una carrera parcial para el PVST
Si el PVST se realiza con control de carrera (parámetro Modo oper. PVST M0889= Carr), este parámetro determina la carrera parcial para un PVST.
88
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
La carrera de la válvula suele ser del 10 al 15 %. La longitud de la carrera parcialdepende de las condiciones del proceso y del grado de cobertura de diagnosisrequerido.
Ajustes del cliente M0041PVST M0852Carr PVST M0854
Valor por defecto: 10,0 %Rango de ajuste: 0,0 ... 100,0 %
9.9.6. Ajustar el tiempo de vigilancia para el PVST
El actuador se para en la posición actual si el test no se ha podido realizar al completodentro del tiempo ajustado.
Ajustes del cliente M0041PVST M0852Vigilancia PVST M0855
Valor por defecto: 01:00,0 min:s (1 minuto)
Rango de ajuste: 0:01,0 ... 50:00,0 min:s (minutos:segundos)
9.9.7. Ajustar el tiempo de maniobra para el PVST
Si el PVST se realiza con control del tiempo de maniobra (parámetro Modo oper.PVST M0889 = Comprobación posición final), este parámetro determina el tiempode maniobra PVST admisible.
Ajustes del cliente M0041PVST M0852Tiempo man. PVST M0890
Valor por defecto: 00:02,0 min:s (2 segundos)
Rango de ajuste: 00:00,1 ... 15:00,0 min:s (minutos:segundos)
9.9.8. Ajustar el tiempo de inversión para el PVST
Tiempo de espera antes de que un PVST se opere de vuelta a la posición inicial.
Ajustes del cliente M0041PVST M0852Tiempo invers PVST M0891
Valor por defecto: 00:02,0 min:s (2 segundos)
Rango de ajuste: 00:00,1 ... 15:00,0 min:s (minutos:segundos)
9.9.9. Recordatorio para PVST
Cuando la función está activada, se genera una señal si no se ha realizado ningúnPVST durante el tiempo de recordatorio.
Activar recordatorio
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041PVST M0852Recordat PVST M0892
Valor por defecto: Función no activaValores de ajuste:
Función no activa Recordatorio no activado.
Función activa Recordatorio activado.
89
Control de actuadorAC 01.2/ACExC 01.2 Funciones de seguridad
Ajustar el tiempo de recordatorio
Ajustes del cliente M0041PVST M0852Tiempo recordat PVST M0893
Valor por defecto: 0 dRango de ajuste: 0 ... 65535 d (días)
9.10. Interface Bluetooth activable y desconectable
El comportamiento del interface Bluetooth en el control de actuador se puede ajustar.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212
M0573
Información El último menú existe sólo en la configuración mediante los mandos locales. EnAUMA CDT y en la app AUMA Assistant, el parámetro se puede configurar ya enel menú Activación.
El parámetro puede tener los siguientes valores:
0 Desconectado (CDT & app)
Off (mandos locales)
1 Conectado (CDT & app)
On (mandos locales)
2 I/O o bus de campo
3 Posición del selector OFF (CDT & app)
Posición del selector (mandos locales)
Cuando el valor del parámetro es «0», el interface Bluetooth está permanentementedesconectado. El establecimiento de conexión no es posible.
Cuando el valor del parámetro es «1», el interface Bluetooth está permanentementeconectado y listo para la recepción. La conexión se puede establecer en todomomento.
A continuación se explican los valores de parámetro «2» y «3».
Activación/desactivación mediante I/O, bus de campo o posición de selectorOFF
El interface Bluetooth puede tener tres estados distintos:
BT_OFF El interface Bluetooth está desconectado. No es posible establecer una conexión através de un maestro. El LED Bluetooth (azul) de los mandos locales está apagado.
BT_READY El interface Bluetooth está conectado y espera al establecimiento de conexión porparte de un maestro. El LED Bluetooth (azul) de los mandos locales parpadea.
BT_CONNECTED El interface Bluetooth está conectado con un maestro. El LED Bluetooth lucepermanentemente.
Propiedades de las señales de entrada:
● Las entradas se activan por el flanco.● El interface Bluetooth se activa con el flanco ascendente.● El interface Bluetooth se desactiva con el flanco descendente.
Información Para los detalles sobre la representación del proceso, véase <Manual (bus decampo de integración de dispositivos) control de actuador AC.2/ACV.2>.
Cuando el parámetro corresponde al valor «2» o «3», el interface Bluetooth seencuentra en el estado «BT_OFF» cuando se conecta el control de actuador.
90
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
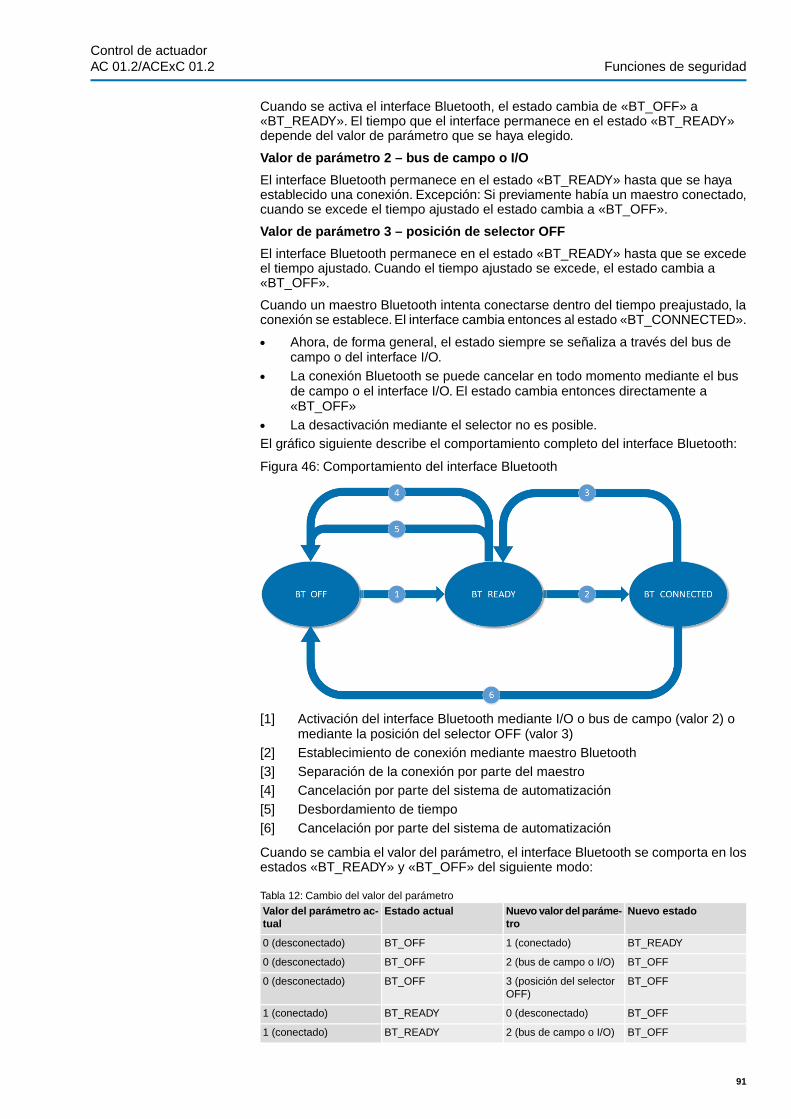
Cuando se activa el interface Bluetooth, el estado cambia de «BT_OFF» a«BT_READY». El tiempo que el interface permanece en el estado «BT_READY»depende del valor de parámetro que se haya elegido.
Valor de parámetro 2 – bus de campo o I/O
El interface Bluetooth permanece en el estado «BT_READY» hasta que se hayaestablecido una conexión. Excepción: Si previamente había un maestro conectado,cuando se excede el tiempo ajustado el estado cambia a «BT_OFF».
Valor de parámetro 3 – posición de selector OFF
El interface Bluetooth permanece en el estado «BT_READY» hasta que se excedeel tiempo ajustado. Cuando el tiempo ajustado se excede, el estado cambia a«BT_OFF».
Cuando un maestro Bluetooth intenta conectarse dentro del tiempo preajustado, laconexión se establece. El interface cambia entonces al estado «BT_CONNECTED».
● Ahora, de forma general, el estado siempre se señaliza a través del bus decampo o del interface I/O.
● La conexión Bluetooth se puede cancelar en todo momento mediante el busde campo o el interface I/O. El estado cambia entonces directamente a«BT_OFF»
● La desactivación mediante el selector no es posible.El gráfico siguiente describe el comportamiento completo del interface Bluetooth:
Figura 46: Comportamiento del interface Bluetooth
[1] Activación del interface Bluetooth mediante I/O o bus de campo (valor 2) omediante la posición del selector OFF (valor 3)
[2] Establecimiento de conexión mediante maestro Bluetooth[3] Separación de la conexión por parte del maestro[4] Cancelación por parte del sistema de automatización[5] Desbordamiento de tiempo[6] Cancelación por parte del sistema de automatización
Cuando se cambia el valor del parámetro, el interface Bluetooth se comporta en losestados «BT_READY» y «BT_OFF» del siguiente modo:
Tabla 12: Cambio del valor del parámetroNuevo estadoNuevo valor del paráme-
troEstado actualValor del parámetro ac-
tual
BT_READY1 (conectado)BT_OFF0 (desconectado)
BT_OFF2 (bus de campo o I/O)BT_OFF0 (desconectado)
BT_OFF3 (posición del selectorOFF)
BT_OFF0 (desconectado)
BT_OFF0 (desconectado)BT_READY1 (conectado)
BT_OFF2 (bus de campo o I/O)BT_READY1 (conectado)
91
Control de actuadorAC 01.2/ACExC 01.2 Funciones de seguridad
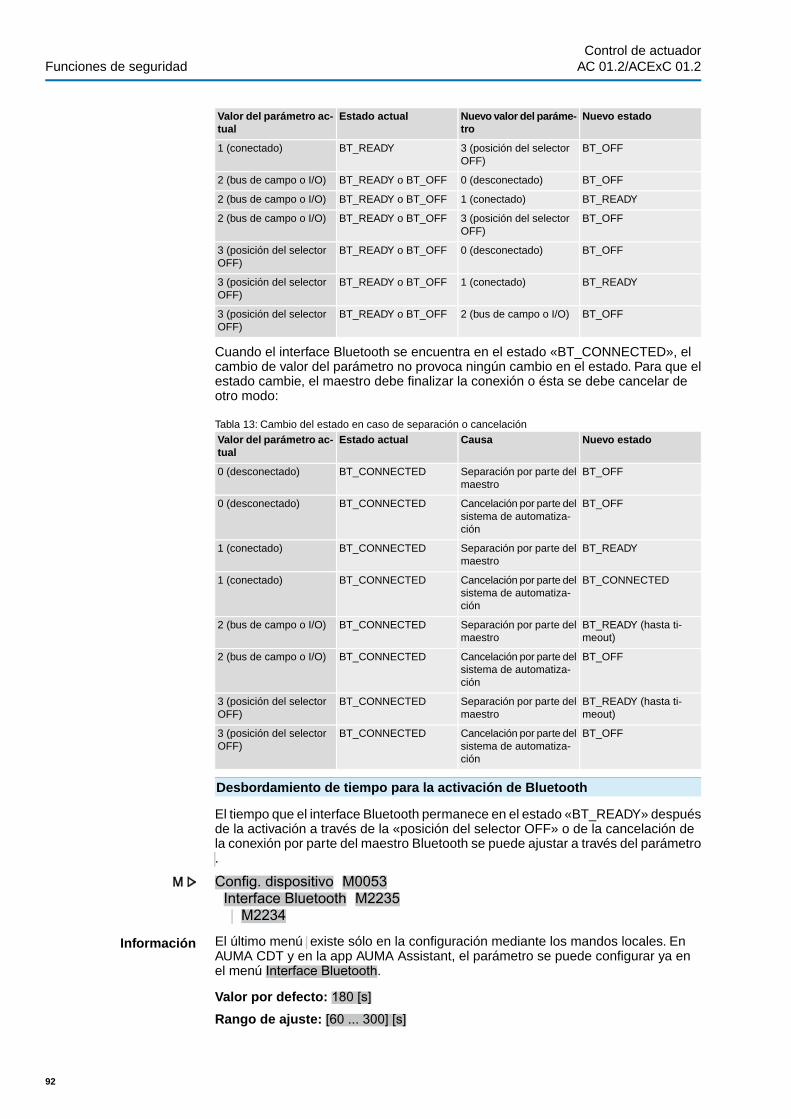
Nuevo estadoNuevo valor del paráme-tro
Estado actualValor del parámetro ac-tual
BT_OFF3 (posición del selectorOFF)
BT_READY1 (conectado)
BT_OFF0 (desconectado)BT_READY o BT_OFF2 (bus de campo o I/O)
BT_READY1 (conectado)BT_READY o BT_OFF2 (bus de campo o I/O)
BT_OFF3 (posición del selectorOFF)
BT_READY o BT_OFF2 (bus de campo o I/O)
BT_OFF0 (desconectado)BT_READY o BT_OFF3 (posición del selectorOFF)
BT_READY1 (conectado)BT_READY o BT_OFF3 (posición del selectorOFF)
BT_OFF2 (bus de campo o I/O)BT_READY o BT_OFF3 (posición del selectorOFF)
Cuando el interface Bluetooth se encuentra en el estado «BT_CONNECTED», elcambio de valor del parámetro no provoca ningún cambio en el estado. Para que elestado cambie, el maestro debe finalizar la conexión o ésta se debe cancelar deotro modo:
Tabla 13: Cambio del estado en caso de separación o cancelaciónNuevo estadoCausaEstado actualValor del parámetro ac-
tual
BT_OFFSeparación por parte delmaestro
BT_CONNECTED0 (desconectado)
BT_OFFCancelación por parte delsistema de automatiza-ción
BT_CONNECTED0 (desconectado)
BT_READYSeparación por parte delmaestro
BT_CONNECTED1 (conectado)
BT_CONNECTEDCancelación por parte delsistema de automatiza-ción
BT_CONNECTED1 (conectado)
BT_READY (hasta ti-meout)
Separación por parte delmaestro
BT_CONNECTED2 (bus de campo o I/O)
BT_OFFCancelación por parte delsistema de automatiza-ción
BT_CONNECTED2 (bus de campo o I/O)
BT_READY (hasta ti-meout)
Separación por parte delmaestro
BT_CONNECTED3 (posición del selectorOFF)
BT_OFFCancelación por parte delsistema de automatiza-ción
BT_CONNECTED3 (posición del selectorOFF)
Desbordamiento de tiempo para la activación de Bluetooth
El tiempo que el interface Bluetooth permanece en el estado «BT_READY» despuésde la activación a través de la «posición del selector OFF» o de la cancelación dela conexión por parte del maestro Bluetooth se puede ajustar a través del parámetro.
Config. dispositivo M0053Interface Bluetooth M2235
M2234
Información El último menú existe sólo en la configuración mediante los mandos locales. EnAUMA CDT y en la app AUMA Assistant, el parámetro se puede configurar ya enel menú Interface Bluetooth.
Valor por defecto: 180 [s]Rango de ajuste: [60 ... 300] [s]
92
Control de actuadorFunciones de seguridad AC 01.2/ACExC 01.2
10. Funciones de vigilancia
Definición Las funciones de vigilancia emiten un aviso o un fallo en cuanto un valor se encuentrafuera del rango admisible. Los fallos suelen provocar la desconexión del actuador.
10.1. Vigilancia de par
La vigilancia del par tiene las siguientes funciones:
● Protección de sobrecarga de la válvula frente a aumentos de par (provoca ladesconexión)
● Aviso de par antes de que se dispare la protección contra la sobrecarga (sóloen combinación con unidad de mando electrónica en el actuador)
Protección de sobrecarga
Cuando la protección de sobrecarga se dispara (el par es mayor que el par dedesconexión ajustado), el actuador se para.
El control de actuador genera una señal de fallo si:
● el aumento de par se produce entre las posiciones finales● el aumento de par se produce en las posiciones finales y el tipo de desconexión
ajustado es por final de carreraLa señal de fallo se visualiza en la pantalla:
● Indicación de estado: S0007 Fallo o S0011 Avería- Detalles: Fallo par CERRAR o Fallo par ABRIR
Antes de poder continuar maniobrando, se debe confirmar el fallo:
1. o bien mediante una orden de maniobra en sentido contrario.- Con Fallo par CERRAR: Orden de maniobra en sentido ABRIR- Con Fallo par ABRIR: Orden de maniobra en sentido CERRAR
2. o bien, cuando el par actual tras la activación vuelve a ser menor que el parde desconexión ajustado:- mediante el pulsador RESET con el selector en la posición Operación
local (LOCAL).
El ajuste de los pares de desconexión para la protección de sobrecarga se realiza,dependiendo de la versión, o bien mediante el switch en el actuador, o bien medianteparámetros de software en el control. Para el ajuste, véase el capítulo <Limitadorde par>.
Aviso de par
Condiciones Actuador con unidad de mando electrónica (MWG).
El aviso de par se puede utilizar, p. ej., para la autovigilancia o para el mantenimientopreventivo.
Ajustes del cliente M0041Limitadores de par M0013Par aviso CERRAR M0769Par aviso ABRIR M0768
Valor por defecto: 80 %Rango de ajuste: 20 ... 100 % del par nominal ajustado
Si se superan los valores límite ajustados, el actuador no se para pero el controlgenera una señal de aviso.
● Indicación de estado: S0005 Avisos o S0008 Fuera de especif.- Detalles: Av par CERRAR o Av par ABRIR
10.1.1. By-pass de limitador de par
Con el by-pass de limitador de par se desactiva la vigilancia de par durante un (breve)tiempo ajustado. Durante este tiempo se puede utilizar todo el par del actuador para,
93
Control de actuadorAC 01.2/ACExC 01.2 Funciones de vigilancia
por ejemplo, soltar el actuador de una posición final tensa o de una posiciónbloqueada.
¡Daños en la válvula por un par excesivo!
→ El by-pass de limitador de par se debe utilizar sólo previo consentimiento delfabricante de la válvula.
Activar el by-pass de limitador de par
Ajustes del cliente M0041Limitadores de par M0013By-pass par M0092
Valor por defecto:Función no activaValores de ajuste:
Función activa El by-pass de limitador de par está activado.
Función no activa El by-pass de limitador de par está desactivado.
Tiempo de duración del by-pass de limitador de par
Durante el tiempo aquí ajustado, la vigilancia de par está desactivada.
Ajustes del cliente M0041Limitadores de par M0013By-pass par [s] M0205
Valor por defecto: 0,0 sRango de ajuste: 0,0 ... 10,0 s segundos
Información Si el by-pass de limitador de par está activado, el tiempo para él debe ser más largoque el tiempo ajustado para el bloqueo de inversión para que el by-pass de limitadorde par también surta efecto con una inversión del sentido de maniobra.
10.1.2. Limitación de par del by-pass de limitador de par
Con el by-pass de limitador de par activado (parámetro By-pass par M0092) sedesactiva la vigilancia de par durante un (breve) tiempo ajustado. Con la activaciónde la limitación de par se conecta de nuevo la vigilancia de par, pero no referida alpar de desconexión ajustado, sino a un par máximo que se puede conectar aquípor separado.
Condición Unidad de mando electrónica con MWG en el actuador (versión no intrusiva)
Activar la limitación de par
Ajustes del cliente M0041Limitadores de par M0013Limitación par M1805
Valor por defecto: Función no activaValores de ajuste:
Función activa La limitación de par del by-pass de limitador de par está conectada.
Durante el tiempo de duración del by-pass de limitador de par, el actuador se paray se genera un fallo de par en cuanto se supera el par máximo admisible.
Función no activa La limitación de par del by-pass de limitador de par está desconectada.
No se realiza vigilancia de par. Durante el tiempo de duración del by-pass de limitadorde par no se genera ningún fallo de par.
Ajustar el par máximo
Ajustes del cliente M0041
94
Control de actuadorFunciones de vigilancia AC 01.2/ACExC 01.2
Limitadores de par M0013Par máximo [%] M1806
Valor por defecto: 120 %Rango de ajuste: 100 ... 150 % (referido al par de desconexión ajustado)
10.2. Vigilancia de protección del motor (vigilancia térmica)
Como protección contra el sobrecalentamiento y las temperaturas altas inadmisiblesen la superficie del actuador, en el devanado del motor se han integrado termistoreso termostatos. La protección del motor se activa en cuanto se alcanza la temperaturamáxima admisible en el devanado.
El actuador se para y se emiten las siguientes señales de fallo:
● El LED 3 (ajuste de fábrica: (protección del motor actuada) de los mandos lo-cales luce.
● El indicador de estado S0007 Fallo o S0011 Avería muestra un fallo.En Detalles se muestra el fallo Fallo térmico.
Antes de poder continuar maniobrando, el motor se debe enfriar.
En función del ajuste del parámetro (comportamiento de protección del motor),después o bien tiene lugar un reset automático de la señal de fallo, o bien se debeconfirmar manualmente la señal de fallo.
La confirmación manual se puede realizar:
● Con el selector en posición Operación local (LOCAL) mediante el pulsadorRESET.
● Con el selector en posición Operación remota (REMOTO) mediante una en-trada digital (interface I/O) con el comando Reset, si se ha configurado unaentrada digital para la señal RESET.
Además, el control de actuador comprueba cíclicamente (1 vez al mes) la capacidadde funcionamiento de la vigilancia de la protección del motor. Si la comprobaciónfalla, el control genera la señal de fallo: EI vigil.prot.mot.
Comportamiento de protección del motor
Nivel de usuario necesario: AUMA (6).
Config. dispositivo M0053Actuador M0168Modo protecc. motor M0169
Valores por defecto:
Actuadores no Ex = AutoActuadores Ex = ResetValores de ajuste:
Auto Reset automático después de enfriarse el motor.
No posible en la versión con protección anti-explosión.
Reset Reset manual.
Una vez que el motor se ha enfriado, el fallo se debe confirmar (restablecer)manualmente como se ha descrito antes.
En algunos casos, el contacto térmico de sobrecorriente se puede restablecerademás a mano. Para ello, retire la tapa que se encuentra en el lado trasero delcontrol de actuador y oprima el pulsador Reset del contacto de sobrecorriente.
10.3. Vigilancia del modo de operación (arrancadas y tiempo de marcha del motor)
Esta función vigila el modo de operación admisible (p. ej., S2 - 15 min) del actuador.
Para ello, el control de actuador vigila si se superan
● las arrancadas del motor admisibles (arrancadas) por hora
95
Control de actuadorAC 01.2/ACExC 01.2 Funciones de vigilancia
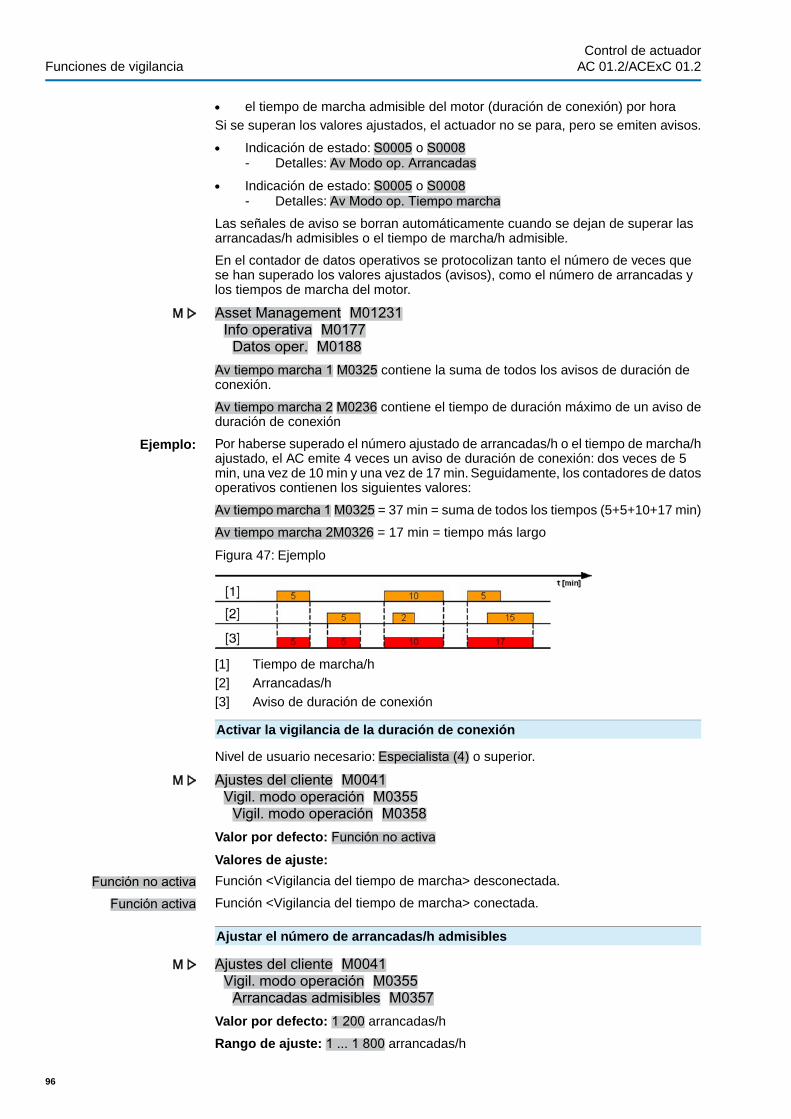
● el tiempo de marcha admisible del motor (duración de conexión) por horaSi se superan los valores ajustados, el actuador no se para, pero se emiten avisos.
● Indicación de estado: S0005 o S0008- Detalles: Av Modo op. Arrancadas
● Indicación de estado: S0005 o S0008- Detalles: Av Modo op. Tiempo marcha
Las señales de aviso se borran automáticamente cuando se dejan de superar lasarrancadas/h admisibles o el tiempo de marcha/h admisible.
En el contador de datos operativos se protocolizan tanto el número de veces quese han superado los valores ajustados (avisos), como el número de arrancadas ylos tiempos de marcha del motor.
Asset Management M01231Info operativa M0177Datos oper. M0188
Av tiempo marcha 1 M0325 contiene la suma de todos los avisos de duración deconexión.
Av tiempo marcha 2 M0236 contiene el tiempo de duración máximo de un aviso deduración de conexión
Ejemplo: Por haberse superado el número ajustado de arrancadas/h o el tiempo de marcha/hajustado, el AC emite 4 veces un aviso de duración de conexión: dos veces de 5min, una vez de 10 min y una vez de 17 min. Seguidamente, los contadores de datosoperativos contienen los siguientes valores:
Av tiempo marcha 1 M0325 = 37 min = suma de todos los tiempos (5+5+10+17 min)
Av tiempo marcha 2M0326 = 17 min = tiempo más largo
Figura 47: Ejemplo
[1] Tiempo de marcha/h[2] Arrancadas/h[3] Aviso de duración de conexión
Activar la vigilancia de la duración de conexión
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Vigil. modo operación M0355Vigil. modo operación M0358
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Vigilancia del tiempo de marcha> desconectada.
Función activa Función <Vigilancia del tiempo de marcha> conectada.
Ajustar el número de arrancadas/h admisibles
Ajustes del cliente M0041Vigil. modo operación M0355Arrancadas admisibles M0357
Valor por defecto: 1 200 arrancadas/h
Rango de ajuste: 1 ... 1 800 arrancadas/h
96
Control de actuadorFunciones de vigilancia AC 01.2/ACExC 01.2
Ajustar el tiempo de marcha/h admisible
Ajustes del cliente M0041Vigil. modo operación M0355Tiempo marcha admisible M0356
Valor por defecto: 15 min (minutos)
Rango de ajuste: 10 ... 60 min (minutos)
10.4. Vigilancia del tiempo de maniobra
Con esta función se puede vigilar el tiempo de maniobra del actuador. En cuanto elactuador necesita más tiempo del ajustado para maniobrar desde la posición finalABIERTO a la posición final CERRADO, se emite un aviso (el actuador no se para):
● Indicación de estado S0005 Avisos- Detalles: Av tiempo man.
La señal de aviso se borra automáticamente cuando se ejecuta una nueva ordende maniobra.
Si el actuador maniobra desde una posición intermedia hasta una posición final, sehace un cálculo proporcional del tiempo de vigilancia ajustado para toda la carrerapara la carrera parcial a realizar aún.
Activar el modo de operación
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Vigil. tiempo oper. M0568Modo operación M0569
Valor por defecto: OffValores de ajuste:
Off La vigilancia del tiempo de maniobra está desactivada.
Manual La vigilancia del tiempo de maniobra está activada. El tiempo de maniobra admisiblese ajusta mediante el parámetro Tiemp.op.perm.manu. M0570.
Ajustar manualmente el tiempo de maniobra admisible
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Vigil. tiempo oper. M0568Tiemp.op.perm.manu. M0570
Valor por defecto: 15:00,0 min:s (15 minutos)
Rango de ajuste: 00:00,0 ... 59:59,9 min:s (minutos:segundos)
Mostrar tiempos de maniobra
Los tiempos de maniobra se pueden mostrar mediante Asset Management. Véase<Mostrar tiempos de maniobra>.
10.5. Vigilancia de reacción
El control de actuador vigila si el actuador se mueve con una orden de maniobra.
Si dentro de un tiempo de reacción ajustable no se puede detectar ninguna reaccióndel actuador, se emitirá un aviso o una señal de fallo, dependiendo del ajuste:
● Indicación de estado: S0005 Avisos o S0008 Fuera de especif.- Detalles: Av, sin reacción
● Indicación de estado: S0007 Fallo o S0011 Avería- Detalles: Fallo sin reacción
97
Control de actuadorAC 01.2/ACExC 01.2 Funciones de vigilancia
Antes de poder continuar maniobrando tras una señal de fallo, se debe confirmarel fallo. La confirmación se puede realizar:
● Con el selector en posición Operación local (LOCAL) mediante el pulsadorRESET.
● Con el selector en posición Operación remota (REMOTO) mediante una en-trada digital (interface I/O) con el comando Reset, si se ha configurado unaentrada digital para la señal RESET.
En el caso de una maniobra iniciada desde una posición intermedia, la vigilancia dela reacción sólo tiene lugar si el actuador está equipado con señal de posición.
Activar la desconexión en caso de fallo de tiempo de reacción
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Vigilancia reacción M0632Comport. actuador M0633
Valor por defecto: No desconexiónValores de ajuste:
No desconexión La vigilancia de la reacción emite sólo un aviso.
Desconexión La vigilancia de la reacción emite una señal de fallo, el actuador se para.
Ajustar el tiempo de reacción
Ajustes del cliente M0041Vigilancia reacción M0632Tiempo de reacción M0634
Valor por defecto: 15,0 sRango de ajuste: 15,0 ... 300,0 segundos (0 segundos a 5 minutos)
10.6. Detección de movimiento
Condiciones Transmisor electrónico de posición en el actuador
Propiedades La detección de movimiento comprueba si el actuador se mueve también sin ordende maniobra (por ejemplo, por la operación manual o por no disponer deauto-retención).
El control detecta un movimiento cuando la salida se mueve dentro del tiempo dedetección ajustado más de la diferencia de recorrido ajustada. El control señalizaentonces: Acoplamiento girando
Información Los parámetros de detección de movimiento tienen influencia también en la vigilanciade la reacción.
10.6.1. Activar la detección de movimiento
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Detector movimiento M0676Detector movimiento M0675
Valor por defecto: Función activaValores de ajuste:
Función no activa Vigilancia desactivada.
Función activa Vigilancia activada.
10.6.2. Tiempo de detección dt
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041
98
Control de actuadorFunciones de vigilancia AC 01.2/ACExC 01.2
Detector movimiento M0676Tiempo detección dt M0677Tiempo det. dt (MWG) M0681
Valores por defecto:
Tiempo detección dt (Con potenciómetro/EWG/RWG en el actuador) = 00:05,0 min:s(5 segundos)
Tiempo det. dt (MWG) (Con MWG en el actuador) = 00:00,5 min:s (0,5 segundos)
Rangos de ajuste:
Tiempo detección dt = 00:01,0 ... 30:00,0 min:s (minutos:segundos)
Tiempo det. dt (MWG) = 00:00,1 ... 00:02,0 min:s (minutos:segundos)
10.6.3. Diferencia de recorrido dx
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Detector movimiento M0676Dif.recorrido dx M0678Dif.recorrido dx (MWG) M0679
Valores por defecto:
Dif.recorrido dx (Con potenciómetro /EWG/RWG en el actuador) = 1,0 %Dif.recorrido dx (MWG) (Con MWG en el actuador) = 3 (incrementos)
Rangos de ajuste:
Dif.recorrido dx = 1,0 ... 10,0 %Dif.recorrido dx (MWG) = 2 ... 20 (incrementos)
10.6.4. Tiempo de retardo
Retardo de la señal: Oper. volanteNivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041Detector movimiento M0676Retardo M0764
Valor por defecto: 6,000 s (segundos)
Rango de ajuste: 0,001 ... 65,535 s
10.7. Vigilancia de la alimentación de tensión del sistema electrónico
El control de actuador vigila las siguientes tensiones y emite un aviso (véase elcapítulo Señales de fallo):
● Tensión auxiliar de 24 V DC, p. ej., para alimentar las entradas de control● Tensión de 24 V AC para el control de contactores-inversores, para termostatos
y calefacción en el actuador y para generar la tensión auxiliar de 115 V ACpara el cliente (opción).
● Alimentación interna de 24 V DC de componentes electrónicos (en el controlde actuador y en el actuador)
● Alimentación externa de 24 V DC del sistema eléctrico (opcional)
Activar la vigilancia de la tensión auxiliar de 24 V DC
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Funciones vigilancia M0645Vigilancia 24 V DC cli. M0650
Valor por defecto: Función no activa
99
Control de actuadorAC 01.2/ACExC 01.2 Funciones de vigilancia
Valores de ajuste:
Función no activa La vigilancia está desactivada.
On La vigilancia está activada. En caso de fallo de la tensión auxiliar de 24 V DC parala alimentación de las entradas de control se emite un aviso.
Activar la vigilancia de la tensión externa de 24 V DC
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Funciones vigilancia M0645Vigilancia 24 V DC ext. M0649
Valor por defecto: Función no activaValores de ajuste:
Función no activa La vigilancia está desactivada.
On La vigilancia está activada. En caso de fallo de la tensión externa de 24 V DC seemite un aviso.
10.8. Vigilancia de la temperatura
Propiedades El control de actuador vigila distintas temperaturas siempre que los sensorescorrespondientes estén instalados.
Si se superan o no se alcanzan determinados límites de temperatura, el controlemite o bien un aviso, o bien una señal de fallo.
Condiciones ● Para la temperatura en la unidad de mando del actuador: MWG (transmisormagnético de carrera y par)
● Para la temperatura del motor: adicionalmente sensor de temperatura (PT100)en el motor
● Para la temperatura de la carcasa de engranajes: adicionalmente sensor detemperatura (PT100) en el engranaje
Información Las temperaturas actuales del dispositivo se pueden mostrar también. Véase<Mostrar temperaturas del dispositivo>.
10.9. Vigilancia del sistema de calefacción/la calefacción
El sistema de calefacción que se encuentra en el control de actuador y la calefacciónde la unidad de mando (en el recinto de interruptores del actuador) se pueden vigilar.Cuando la vigilancia está activada y el sistema de calefacción o la calefacción fallan(circuito de corriente = interrumpido), se genera la siguiente advertencia:
● En la pantalla de los mandos locales, indicación de estado S0005 Avisos- Detalles: Aviso interno Av calefacción
Encontrará más información sobre el sistema de calefacción y las calefacciones enel capítulo aparte <Sistema de calefacción y calefacciones>.
Activar la vigilancia del sistema de calefacción del control
Con la vigilancia del sistema de calefacción se vigilan los fallos de todas lascalefacciones conectadas a ella.
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Funciones vigilancia M00645Vigil. sistema calef. M0647
Valor por defecto: Función no activaValores de ajuste:
Función no activa La vigilancia de las calefacciones está desactivada.
Función activa La vigilancia de las calefacciones está activada.
100
Control de actuadorFunciones de vigilancia AC 01.2/ACExC 01.2
Activar la vigilancia de la calefacción de la unidad de mando
Información Si en el control de actuador hay instalado un sistema de calefacción, la activación/de-sactivación de la vigilancia de calefacción no se realiza mediante este parámetro,sino mediante el parámetro Vigil. sistema calef. M0647 del sistema de calefacción.
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Actuador M0168Vigilancia calefacción M0646
Valor por defecto: Función no activaValores de ajuste:
Función no activa La vigilancia de calefacción está desactivada.
Función activa La vigilancia de calefacción está activada. En caso de fallo de la calefacción, seemite una advertencia.
Información La vigilancia se puede realizar sólo cuando la calefacción está conectada (parámetroCalefacción unidad mando).
Ajustar el tiempo de reacción de la vigilancia de calefacción
La vigilancia de calefacción se dispara cuando un fallo permanece más tiempo queel tiempo de vigilancia ajustado. Los fallos que se producen brevemente, durantemenos tiempo que el tiempo de vigilancia ajustado aquí, no se emiten comoadvertencias.
Nivel de usuario necesario: AUMA (6).
Config. dispositivo M0053Actuador M0168Tiempo vigil. calef. M0859
Valor por defecto: 300,0 segundos
Rango de ajuste: 60 ... 3600 segundos (1 minuto a 1 hora)
10.10. Comprobación de sub-conjuntos
Condiciones ● Actuadores con unidad de mando electrónica
Propiedades El control comprueba si los sub-conjuntos instalados en el actuador y en el controlcorresponden a la versión deseada.
Si se han instalado sub-conjuntos incorrectos o faltan sub-conjuntos, el control emiteo bien un aviso, o bien una señal de fallo.
Para más información sobre estas señales, véase el capítulo <Señales de fallo yavisos>.
10.11. Vigilancia de pérdida de fase
Condiciones La vigilancia de pérdida de fase tiene validez sólo en caso de conexión a una redde corriente trifásica. En las versiones con corriente alterna o corriente continua noes posible la vigilancia de pérdida de fase.
Propiedades El control de actuador vigila la fase L2. Si la fase L2 se pierde durante un tiempodeterminado, el control de actuador puede emitir señales y genera una señal defallo. Como el control de actuador se alimenta mediante las fases L1 y L3, estasfases no se pueden vigilar. En caso de pérdida de L1 o L3, el control de actuadorcarece de función, el actuador se para.
Información Si durante la operación motorizada se pierde la fase L2, ello no provoca la paradaforzosa del actuador. El motivo de ello es que el propio motor en giro genera la faseque falta. Sin embargo, con ello se reduce el par de salida del motor. Si el par essuficiente para accionar la válvula, la pérdida de la fase L2 se detecta sólo con ladesconexión (p. ej., en una posición final) y se genera la señal de fallo Fallo de fase.
101
Control de actuadorAC 01.2/ACExC 01.2 Funciones de vigilancia
Configuración del tiempo de disparo
Nivel de acceso necesario: Especialista (4) o superior.
Config. dispositivo M0053Vigilancia de fase M0170Tiempo disparo M0172
Valor por defecto: 10,0 sRango de ajuste: 1,0 – 300,0 s
Información Durante el tiempo de disparo que se ajusta aquí, los fallos de tensión de alimentación(p. ej., caídas de tensión) no provocan una señal de fallo.
10.12. Detección de secuencia de fases y corrección del sentido de giro
Condiciones La detección de secuencia de fases tiene validez sólo en caso de conexión a unared de corriente trifásica. En las versiones con corriente alterna o corriente continuano es posible la detección de secuencia de fases.
Propiedades Cuando se confunden dos conductores externos cualesquiera, se produce un cambioen el sentido de giro. Si las fases L1, L2, L3 se conectan en la secuencia incorrecta,el AUMATIC lo detecta y lo corrige. De este modo se impide que el actuador gireen el sentido equivocado.
Activar la detección de secuencia de fases y la corrección del sentido de giro
Config. dispositivo M0053Vigilancia de fase M0170Adaptar sentido giro M0171
Valor por defecto:Función activaValores de ajuste:
Función activa La función <Detección de secuencia de fases y corrección del sentido de giro> estáactivada.
Función no activa La detección de secuencia de fases y corrección del sentido de giro está desactivada.
102
Control de actuadorFunciones de vigilancia AC 01.2/ACExC 01.2
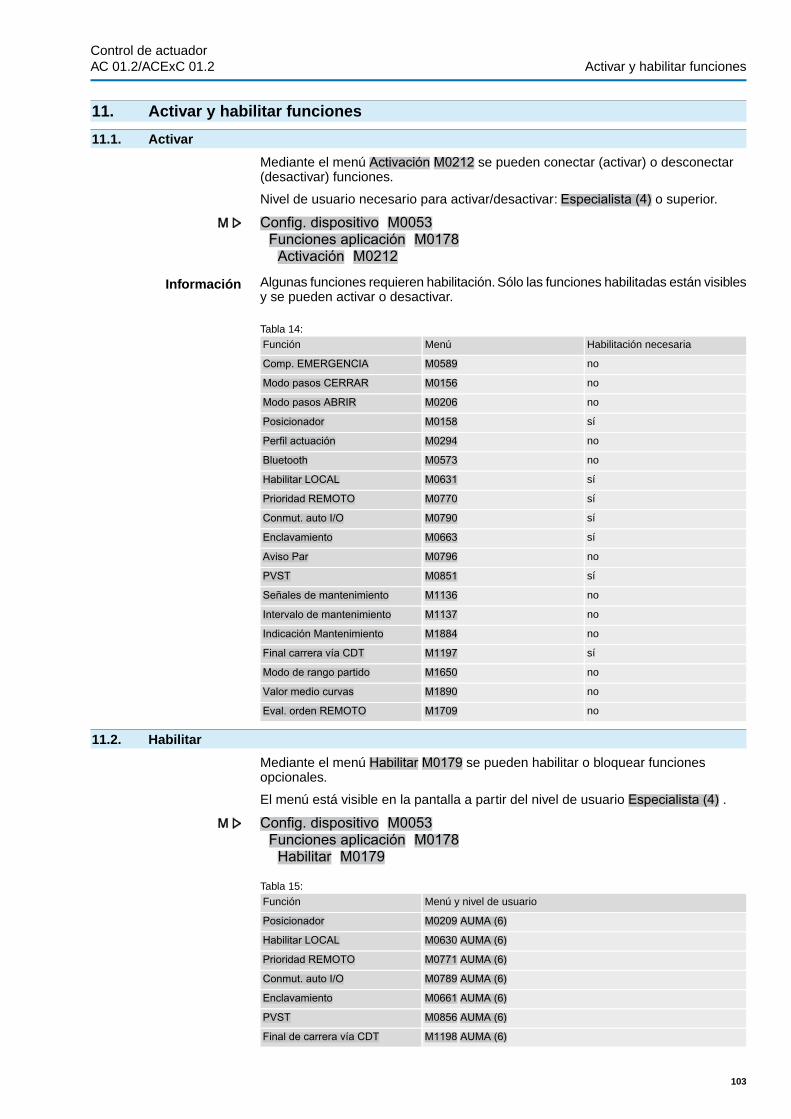
11. Activar y habilitar funciones
11.1. Activar
Mediante el menú Activación M0212 se pueden conectar (activar) o desconectar(desactivar) funciones.
Nivel de usuario necesario para activar/desactivar: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212
Información Algunas funciones requieren habilitación. Sólo las funciones habilitadas están visiblesy se pueden activar o desactivar.
Tabla 14:Habilitación necesariaMenúFunción
noM0589Comp. EMERGENCIA
noM0156Modo pasos CERRAR
noM0206Modo pasos ABRIR
síM0158Posicionador
noM0294Perfil actuación
noM0573Bluetooth
síM0631Habilitar LOCAL
síM0770Prioridad REMOTO
síM0790Conmut. auto I/O
síM0663Enclavamiento
noM0796Aviso Par
síM0851PVST
noM1136Señales de mantenimiento
noM1137Intervalo de mantenimiento
noM1884Indicación Mantenimiento
síM1197Final carrera vía CDT
noM1650Modo de rango partido
noM1890Valor medio curvas
noM1709Eval. orden REMOTO
11.2. Habilitar
Mediante el menú Habilitar M0179 se pueden habilitar o bloquear funcionesopcionales.
El menú está visible en la pantalla a partir del nivel de usuario Especialista (4) .
Config. dispositivo M0053Funciones aplicación M0178Habilitar M0179
Tabla 15:Menú y nivel de usuarioFunción
M0209 AUMA (6)Posicionador
M0630 AUMA (6)Habilitar LOCAL
M0771 AUMA (6)Prioridad REMOTO
M0789 AUMA (6)Conmut. auto I/O
M0661 AUMA (6)Enclavamiento
M0856 AUMA (6)PVST
M1198 AUMA (6)Final de carrera vía CDT
103
Control de actuadorAC 01.2/ACExC 01.2 Activar y habilitar funciones

Información Adicionalmente al nivel de usuario Especialista (4) es necesaria una contraseña dehabilitación (asociada al número de fabricación) para la habilitación de la función.La contraseña de habilitación sólo puede ser generada y asignada por el ServicioAUMA.
104
Control de actuadorActivar y habilitar funciones AC 01.2/ACExC 01.2
12. Variantes de producto
12.1. Funciones de multiport valve
La función de multiport valve es una variante del producto y debe estar activadade fábrica. Sólo con la función de multiport valve activada se dispone en el menúdel control de actuador de los parámetros correspondientes para el ajuste.
Propiedades La función de multiport valve permite en las válvulas con varias conexiones lamaniobra directa a una conexión de la válvula sin tener que detenerse en otraconexión. Ejemplo: maniobrar de la posición 2 a la posición 4 sin detenerse en laposición 3.
En el modo de operación Local se puede maniobrar hasta a 16 posiciones. En elmodo de operación Remoto, la función «Posición siguiente» permite también hasta16 posiciones.
Dependiendo del ajuste, el actuador maniobra la válvula en un sentido de giro definido(giro en sentido anti-horario o giro en sentido horario) o por el camino más cortoposible (independientemente de la posición en la que se encuentre el actuador)hasta la conexión de la válvula especificada.
Procedimiento de puesta en marcha de una multiport valve
1. Comprobar/ajustar los parámetros de la multiport valve:(suelen venir ya ajustados de fábrica en el momento de la entrega)- Tipo de actuador- Desmultiplicación del reductor- Número de puertos (posiciones)- Configuración de las entradas digitales
2. Establecer/comprobar las posiciones (de las conexiones de válvula)3. Ajustar/comprobar el comportamiento de señal de las posiciones4. Establecer Homeport (ajuste cero)5. Maniobrar a las posiciones.6. En el caso necesario, ajustar/corregir otros parámetros de la multiport valve,
como post-recorrido, banda muerta, compensación de holgura e histéresis.7. Si se han ajustado otros parámetros de Multiport Valve: Restablezca el homeport
y establézcalo de nuevo.
12.1.1. Ajustar/comprobar el tipo de actuador
El tipo de actuador se ajusta de fábrica, pero puede cambiarse posteriormente.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041multi port valve M1140Tipo de actuador M1142
Valor por defecto: Tipo de actuador de fábrica
Rangos de ajuste: Lista de selección de todos los actuadores AUMA
12.1.2. Ajustar/comprobar la desmultiplicación del reductor
Aquí se ajusta la desmultiplicación de la etapa del reductor de válvula montado enel actuador. Para facilitar los ajustes se dispone de una selección de reductorescompatibles.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041multi port valve M1140Desmultiplicación reductor M1143
Valores por defecto: GS50.3
105
Control de actuadorAC 01.2/ACExC 01.2 Variantes de producto
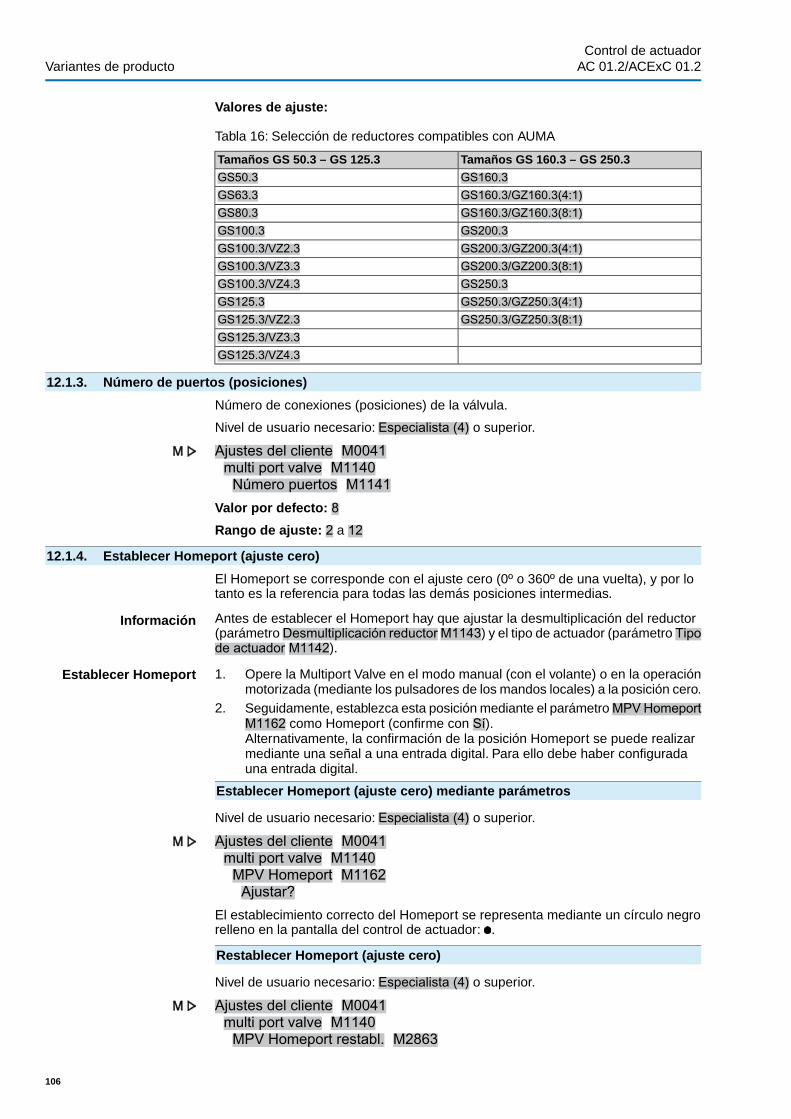
Valores de ajuste:
Tabla 16: Selección de reductores compatibles con AUMA
Tamaños GS 160.3 – GS 250.3Tamaños GS 50.3 – GS 125.3GS160.3GS50.3GS160.3/GZ160.3(4:1)GS63.3GS160.3/GZ160.3(8:1)GS80.3GS200.3GS100.3GS200.3/GZ200.3(4:1)GS100.3/VZ2.3GS200.3/GZ200.3(8:1)GS100.3/VZ3.3GS250.3GS100.3/VZ4.3GS250.3/GZ250.3(4:1)GS125.3GS250.3/GZ250.3(8:1)GS125.3/VZ2.3
GS125.3/VZ3.3GS125.3/VZ4.3
12.1.3. Número de puertos (posiciones)
Número de conexiones (posiciones) de la válvula.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041multi port valve M1140Número puertos M1141
Valor por defecto: 8Rango de ajuste: 2 a 12
12.1.4. Establecer Homeport (ajuste cero)
El Homeport se corresponde con el ajuste cero (0º o 360º de una vuelta), y por lotanto es la referencia para todas las demás posiciones intermedias.
Información Antes de establecer el Homeport hay que ajustar la desmultiplicación del reductor(parámetro Desmultiplicación reductor M1143) y el tipo de actuador (parámetro Tipode actuador M1142).
Establecer Homeport 1. Opere la Multiport Valve en el modo manual (con el volante) o en la operaciónmotorizada (mediante los pulsadores de los mandos locales) a la posición cero.
2. Seguidamente, establezca esta posición mediante el parámetro MPVHomeportM1162 como Homeport (confirme con Sí).Alternativamente, la confirmación de la posición Homeport se puede realizarmediante una señal a una entrada digital. Para ello debe haber configuradauna entrada digital.
Establecer Homeport (ajuste cero) mediante parámetros
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041multi port valve M1140MPV Homeport M1162Ajustar?
El establecimiento correcto del Homeport se representa mediante un círculo negrorelleno en la pantalla del control de actuador: .
Restablecer Homeport (ajuste cero)
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041multi port valve M1140MPV Homeport restabl. M2863
106
Control de actuadorVariantes de producto AC 01.2/ACExC 01.2
Reset?El restablecimiento correcto del Homeport se representa mediante un círculo blancocon borde negro en la pantalla del control de actuador: .
Configuración de la entrada digital
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Utilizar entrada DIN 5 para señal «Establecer Homeport»:
Parámetro: Señal DIN 5 M0122Valor de ajuste: MPV Ajustar pos. Home (Nombre en el diagrama de cableado:Homeport)
Información La lógica para las entradas digitales se puede invertir: Dependiendo del ajuste delparámetro (p. ej., Codificación DIN 5 M0127) es la entrada High active o Low active.El ajuste por defecto es High active.
12.1.5. Fijar/comprobar las posiciones (de las conexiones de válvula)
Cada posición puede ajustarse a un valor deseado entre los 0º y los 360º (una vueltade la válvula).
Información Antes de ajustar las posiciones, hay que establecer un Homeport MPV Homeport).
Éste se corresponde con el ajuste cero de la válvula (0º o 360º de una vuelta, o 0 %o 100 % de la señal de posición).
Después, hay que ajustar la posición de los puertos de la válvula.
Ajustes del cliente M0041multi port valve M1140Posiciones MPV M1149
Rangos de ajuste: 0.0 a 359.9°
Valores por defecto: 0.0° (para todas las posiciones)
Las posiciones pueden también venir preajustadas de fábrica, si se prefiere.
Ejemplo de asignación para una Multiport Valve con 8 conexiones: todas lasposiciones se distribuyen igualmente a lo largo de los 360º.
Posición 1 = 0.0 (o 359,9°)Posición 2 = 45.0Posición 3 = 90.0Posición 4 = 135.0Posición 5 = 180.0Posición 6 = 225.0Posición 7 = 270.0Posición 8 = 315.0
12.1.6. Maniobra a posición mediante los pulsadores de los mandos locales
Para maniobrar a una posición mediante los pulsadores de los mandos locales,debe aparecer la indicación de estado S0017 (véase también <Indicaciones enpantalla>).
107
Control de actuadorAC 01.2/ACExC 01.2 Variantes de producto
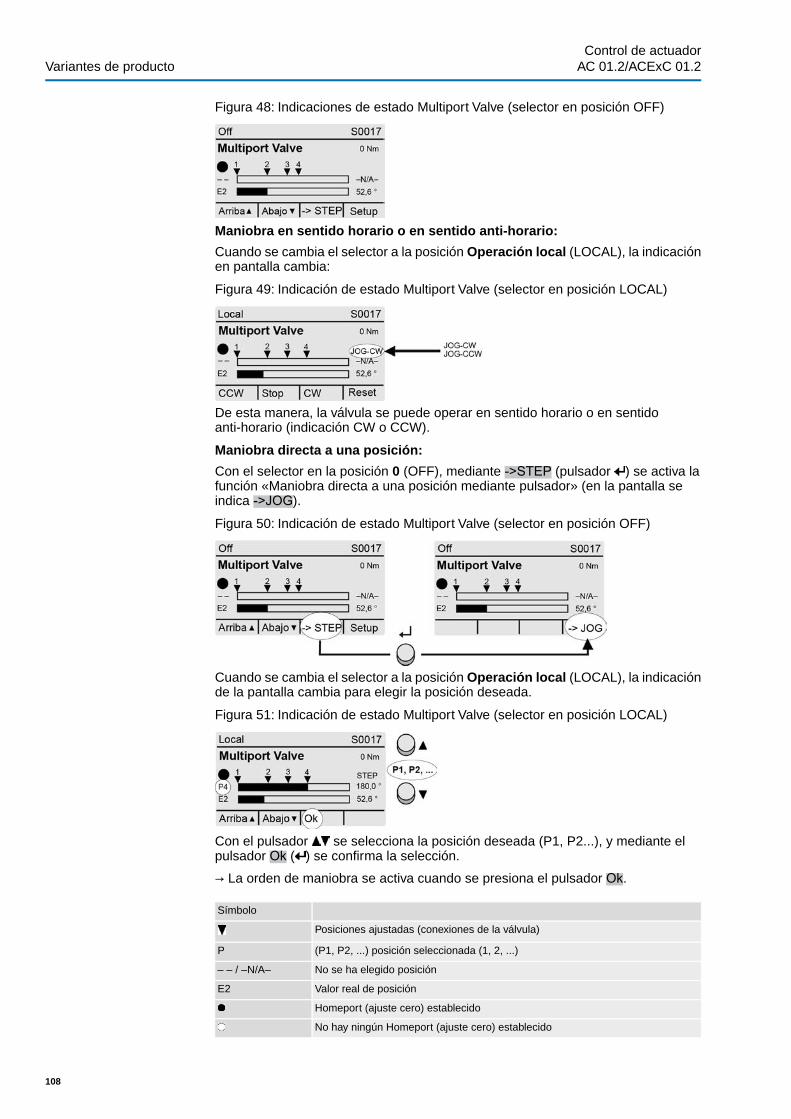
Figura 48: Indicaciones de estado Multiport Valve (selector en posición OFF)
Maniobra en sentido horario o en sentido anti-horario:
Cuando se cambia el selector a la posición Operación local (LOCAL), la indicaciónen pantalla cambia:
Figura 49: Indicación de estado Multiport Valve (selector en posición LOCAL)
De esta manera, la válvula se puede operar en sentido horario o en sentidoanti-horario (indicación CW o CCW).
Maniobra directa a una posición:
Con el selector en la posición 0 (OFF), mediante ->STEP (pulsador ) se activa lafunción «Maniobra directa a una posición mediante pulsador» (en la pantalla seindica ->JOG).
Figura 50: Indicación de estado Multiport Valve (selector en posición OFF)
Cuando se cambia el selector a la posición Operación local (LOCAL), la indicaciónde la pantalla cambia para elegir la posición deseada.
Figura 51: Indicación de estado Multiport Valve (selector en posición LOCAL)
Con el pulsador se selecciona la posición deseada (P1, P2...), y mediante elpulsador Ok ( ) se confirma la selección.
→ La orden de maniobra se activa cuando se presiona el pulsador Ok.
Símbolo
Posiciones ajustadas (conexiones de la válvula)
(P1, P2, ...) posición seleccionada (1, 2, ...)P
No se ha elegido posición– – / –N/A–
Valor real de posiciónE2
Homeport (ajuste cero) establecido
No hay ningún Homeport (ajuste cero) establecido
108
Control de actuadorVariantes de producto AC 01.2/ACExC 01.2
Para interrumpir una maniobra (orden de maniobra disparada):
→ Durante la maniobra seleccione «– – / –N/A–» y confirme con Ok (pulsador ).El actuador se detiene entonces en su posición actual.
12.1.7. Maniobra remota a posición
Para maniobrar directamente a una posición desde remoto, el selector debe estaren la posición Operación remota (REMOTO).
Maniobra a una posición mediante entradas digitales
Para cada posición (conexión a la válvula) debe haber configurada una entrada(DIN).
Configuración de las entradas digitales
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Uso de entrada DIN4 para maniobra a posición 1 por el camino más corto:
Parámetro: Señal DIN 4 M0118 = Pos. intermedia 1
Comportamiento operativo durante el controlde la entrada
Valores de ajuste para entradas digita-les (DIN)
Se maniobra a la posición ajustada por el caminomás corto
Posición intermedia 1 hastaPosición intermedia 16
Se maniobra a la posición ajustada en sentido ho-rario
MPV: CW Posición 1 hastaMPV: CW Posición 10
Se maniobra a la posición ajustada en sentido anti-horario
MPV: CCW Posición 1 hastaMPV: CCW Posición 10
El actuador maniobra en sentido horario (sin pararen una posición).
MPV DriveCW
El actuador maniobra en sentido anti-horario (sinparar en una posición).
MPV DriveCCW
Orden «Posición siguiente»
Nivel de usuario necesario: Especialista (4) o superior.
Se puede utilizar una entrada digital para seleccionar la maniobra deseada al puertomás cercano, incluyendo el sentido de maniobra. De este modo se pueden maniobrarsin conexión de bus de campo y con sólo 2 entradas hasta 16 puertos en ambossentidos.
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Ejemplo Parámetro Señal DIN 1 M0117:
● Posición siguiente CW = en sentido horario● Pos. siguiente CCW = en sentido anti-horarioAuto-retención de fábrica en ambos sentidos (CW y CCW).
12.1.8. Banda muerta
La banda muerta evita, dentro de la zona especificada, la realización de una maniobraa una nueva posición de setpoint.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041multi port valve M1140Banda muerta M1145
109
Control de actuadorAC 01.2/ACExC 01.2 Variantes de producto
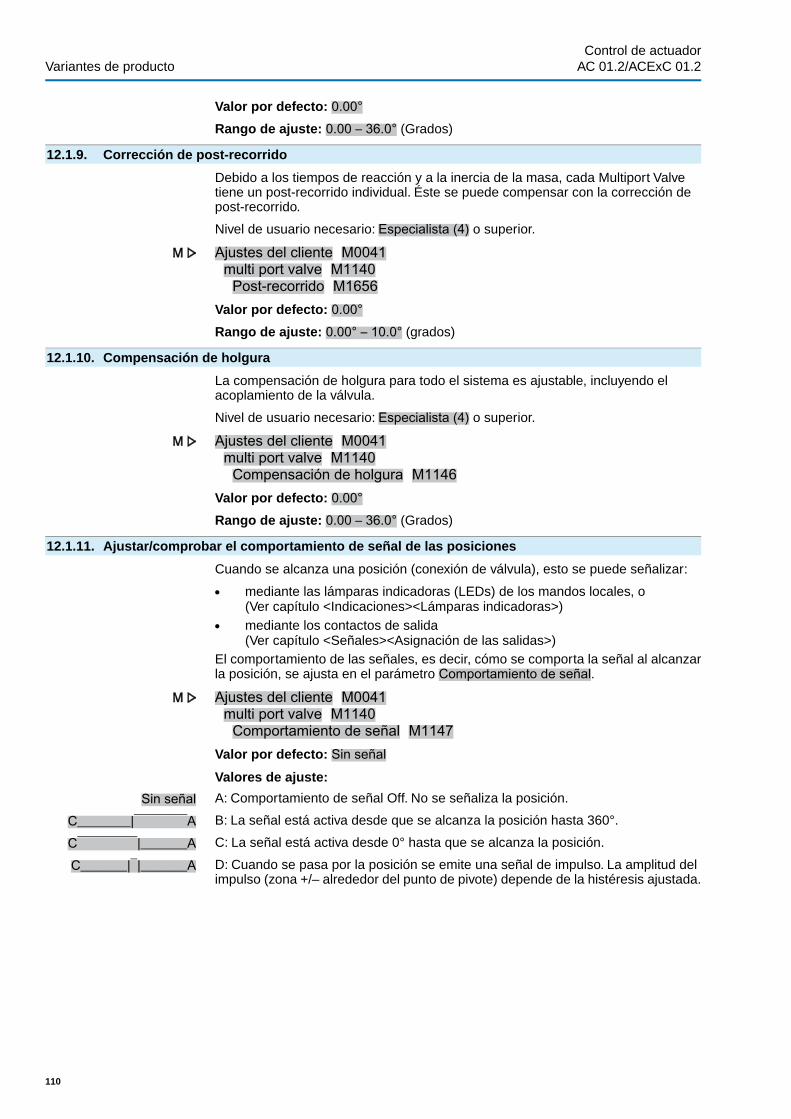
Valor por defecto: 0.00°Rango de ajuste: 0.00 – 36.0° (Grados)
12.1.9. Corrección de post-recorrido
Debido a los tiempos de reacción y a la inercia de la masa, cada Multiport Valvetiene un post-recorrido individual. Éste se puede compensar con la corrección depost-recorrido.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041multi port valve M1140Post-recorrido M1656
Valor por defecto: 0.00°Rango de ajuste: 0.00° – 10.0° (grados)
12.1.10. Compensación de holgura
La compensación de holgura para todo el sistema es ajustable, incluyendo elacoplamiento de la válvula.
Nivel de usuario necesario: Especialista (4) o superior.
Ajustes del cliente M0041multi port valve M1140Compensación de holgura M1146
Valor por defecto: 0.00°Rango de ajuste: 0.00 – 36.0° (Grados)
12.1.11. Ajustar/comprobar el comportamiento de señal de las posiciones
Cuando se alcanza una posición (conexión de válvula), esto se puede señalizar:
● mediante las lámparas indicadoras (LEDs) de los mandos locales, o(Ver capítulo <Indicaciones><Lámparas indicadoras>)
● mediante los contactos de salida(Ver capítulo <Señales><Asignación de las salidas>)
El comportamiento de las señales, es decir, cómo se comporta la señal al alcanzarla posición, se ajusta en el parámetro Comportamiento de señal.
Ajustes del cliente M0041multi port valve M1140Comportamiento de señal M1147
Valor por defecto: Sin señalValores de ajuste:
Sin señal A: Comportamiento de señal Off. No se señaliza la posición.
C________|¯¯¯¯¯¯¯¯A B: La señal está activa desde que se alcanza la posición hasta 360°.
C¯¯¯¯¯¯¯¯¯|_______A C: La señal está activa desde 0° hasta que se alcanza la posición.
C_______|¯|_______A D: Cuando se pasa por la posición se emite una señal de impulso. La amplitud delimpulso (zona +/– alrededor del punto de pivote) depende de la histéresis ajustada.
110
Control de actuadorVariantes de producto AC 01.2/ACExC 01.2
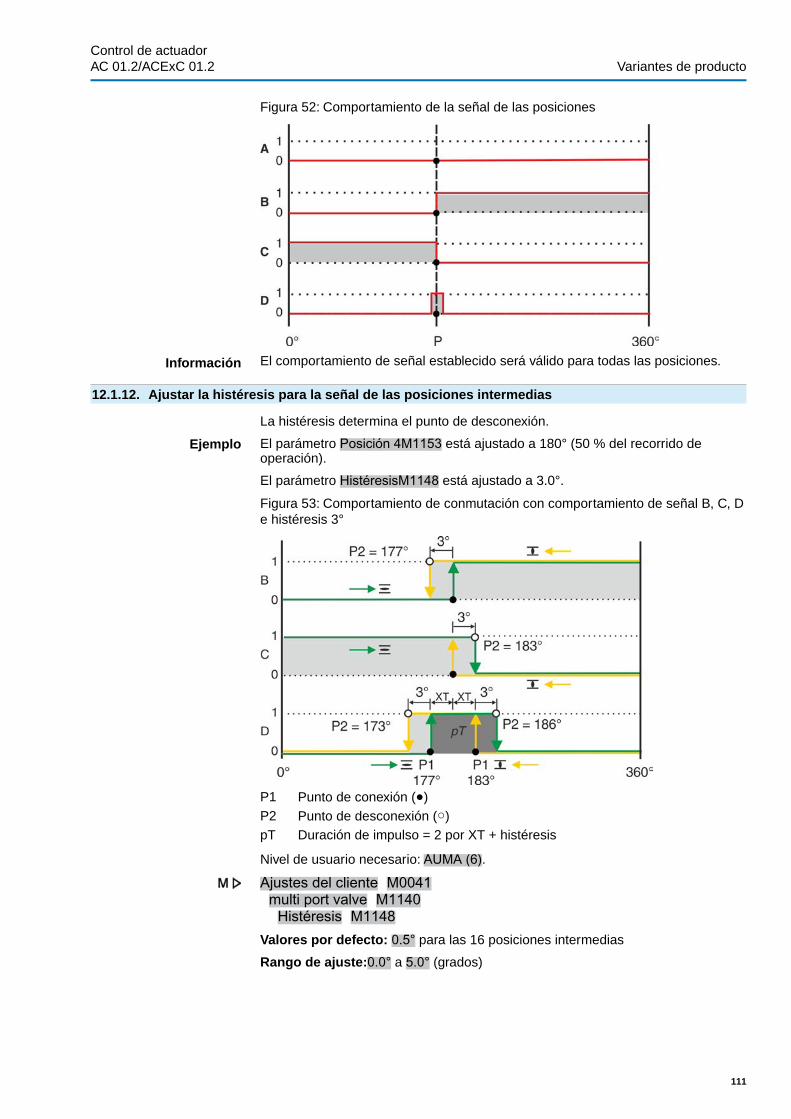
Figura 52: Comportamiento de la señal de las posiciones
Información El comportamiento de señal establecido será válido para todas las posiciones.
12.1.12. Ajustar la histéresis para la señal de las posiciones intermedias
La histéresis determina el punto de desconexión.
Ejemplo El parámetro Posición 4M1153 está ajustado a 180° (50 % del recorrido deoperación).
El parámetro HistéresisM1148 está ajustado a 3.0°.
Figura 53: Comportamiento de conmutación con comportamiento de señal B, C, De histéresis 3°
P1 Punto de conexión (●)P2 Punto de desconexión (○)pT Duración de impulso = 2 por XT + histéresis
Nivel de usuario necesario: AUMA (6).
Ajustes del cliente M0041multi port valve M1140Histéresis M1148
Valores por defecto: 0.5° para las 16 posiciones intermedias
Rango de ajuste:0.0° a 5.0° (grados)
111
Control de actuadorAC 01.2/ACExC 01.2 Variantes de producto
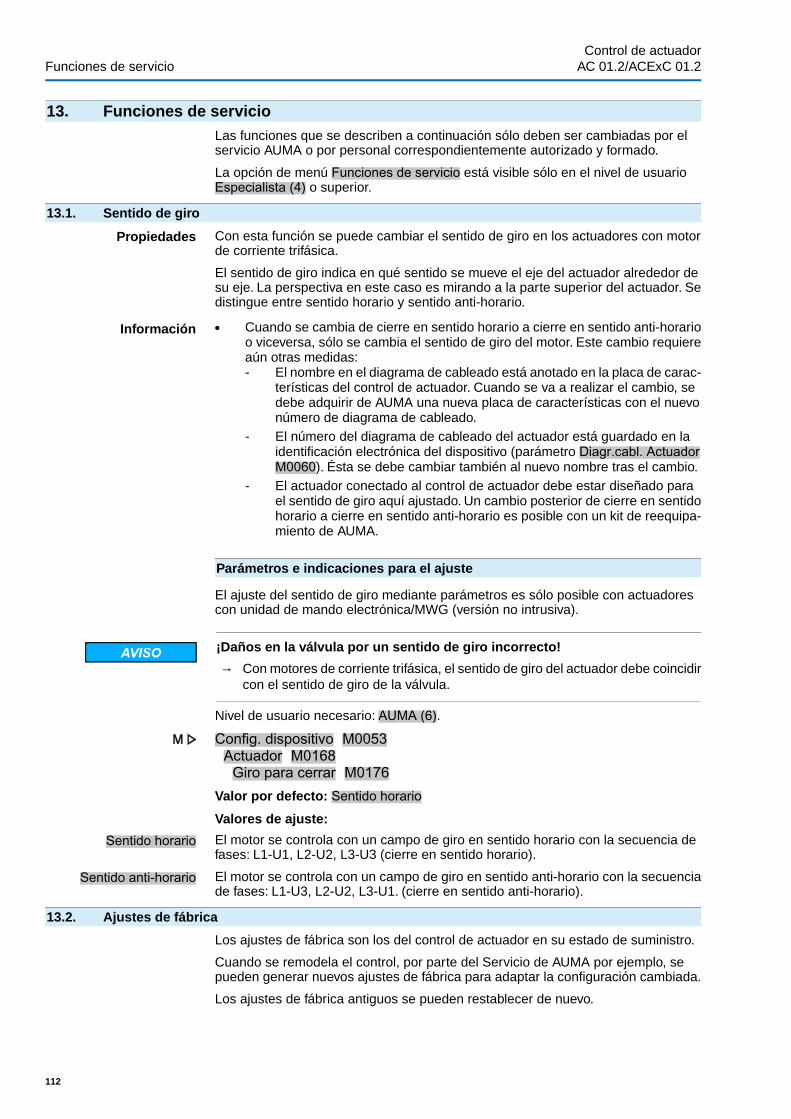
13. Funciones de servicioLas funciones que se describen a continuación sólo deben ser cambiadas por elservicio AUMA o por personal correspondientemente autorizado y formado.
La opción de menú Funciones de servicio está visible sólo en el nivel de usuarioEspecialista (4) o superior.
13.1. Sentido de giro
Propiedades Con esta función se puede cambiar el sentido de giro en los actuadores con motorde corriente trifásica.
El sentido de giro indica en qué sentido se mueve el eje del actuador alrededor desu eje. La perspectiva en este caso es mirando a la parte superior del actuador. Sedistingue entre sentido horario y sentido anti-horario.
Información ● Cuando se cambia de cierre en sentido horario a cierre en sentido anti-horarioo viceversa, sólo se cambia el sentido de giro del motor. Este cambio requiereaún otras medidas:- El nombre en el diagrama de cableado está anotado en la placa de carac-
terísticas del control de actuador. Cuando se va a realizar el cambio, sedebe adquirir de AUMA una nueva placa de características con el nuevonúmero de diagrama de cableado.
- El número del diagrama de cableado del actuador está guardado en laidentificación electrónica del dispositivo (parámetro Diagr.cabl. ActuadorM0060). Ésta se debe cambiar también al nuevo nombre tras el cambio.
- El actuador conectado al control de actuador debe estar diseñado parael sentido de giro aquí ajustado. Un cambio posterior de cierre en sentidohorario a cierre en sentido anti-horario es posible con un kit de reequipa-miento de AUMA.
Parámetros e indicaciones para el ajuste
El ajuste del sentido de giro mediante parámetros es sólo posible con actuadorescon unidad de mando electrónica/MWG (versión no intrusiva).
¡Daños en la válvula por un sentido de giro incorrecto!
→ Con motores de corriente trifásica, el sentido de giro del actuador debe coincidircon el sentido de giro de la válvula.
Nivel de usuario necesario: AUMA (6).
Config. dispositivo M0053Actuador M0168Giro para cerrar M0176
Valor por defecto: Sentido horarioValores de ajuste:
Sentido horario El motor se controla con un campo de giro en sentido horario con la secuencia defases: L1-U1, L2-U2, L3-U3 (cierre en sentido horario).
Sentido anti-horario El motor se controla con un campo de giro en sentido anti-horario con la secuenciade fases: L1-U3, L2-U2, L3-U1. (cierre en sentido anti-horario).
13.2. Ajustes de fábrica
Los ajustes de fábrica son los del control de actuador en su estado de suministro.
Cuando se remodela el control, por parte del Servicio de AUMA por ejemplo, sepueden generar nuevos ajustes de fábrica para adaptar la configuración cambiada.
Los ajustes de fábrica antiguos se pueden restablecer de nuevo.
112
Control de actuadorFunciones de servicio AC 01.2/ACExC 01.2
Generar nuevos ajustes de fábrica
Nivel de usuario necesario: Servicio (5) o superior.
Config. dispositivo M0053Funciones de servicio M0222Crear ajustes fábrica M0225
Genera nuevos ajustes de fábrica mediante la aceptación de los ajustes actuales.
Restablecer los ajustes de fábrica
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones de servicio M0222Restabl. ajustes fábr. M0226
Restablece los ajustes actuales a los ajustes de fábrica.
13.3. Recargar idiomas
En caso de que se realicen cambios en los textos o cuando hay disponible un nuevoidioma de pantalla, el archivo de idiomas se puede actualizar con el soporteinformático externo (tarjeta SD).
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones de servicio M0222Recargar idiomas M0227
13.4. Exportación de datos
Con la exportación de datos, los datos del dispositivo se guardan en un soporteinformático externo (tarjeta SD).
Exportar datos
Exportación completa de todos los datos (parámetros, datos operativos y protocolode eventos).
Los datos operativos son específicos del dispositivo.
Nivel de usuario necesario: Servicio (5) o superior.
Config. dispositivo M0053Funciones de servicio M0222Exportar todos datos M0223
Exportar parámetros
Exportar todos los parámetros. Aquí no se transmiten datos operativos.
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones de servicio M0222Exp.todos parámetros M0297
Exportar el protocolo de eventos
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones de servicio M0222Exportar inf. eventos M0298
113
Control de actuadorAC 01.2/ACExC 01.2 Funciones de servicio
13.5. Importación de datos
En la importación de datos, los datos se transfieren de un soporte informático externo(tarjeta SD) al control.
Importar parámetros
Importar todos los parámetros. Los datos operativos no se sobrescriben.
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones de servicio M0222Imp. todos parámetr. M0311
13.6. Aceptar la configuración real actual
Cuando se remodela un control, se sustituyen módulos por módulos nuevos condistinta funcionalidad.
Ejemplo: Cambio de la fuente de alimentación (otra tensión).
Si durante el inicio el control detecta un módulo cambiado, se genera la siguienteseñal de fallo: Error configuración
Aceptar la configuración real actual
Se acepta la nueva configuración real como configuración nominal.
Nivel de usuario necesario: AUMA (6).
Config. dispositivo M0053Funciones de servicio M0222Aceptar conf.actual M0590
13.7. Actualización del firmware
Una actualización del firmware es necesaria en los siguientes casos:
● Reequipamiento de nuevas funciones● Solución de fallosLa actualización del firmware se puede realizar de los siguientes modos:
1. mediante conexión Bluetooth con el software AUMA CDT2. mediante una tarjeta SD (ranura para tarjetas en los mandos locales)
Versión de firmware
La versión del firmware se puede mostrar mediante el siguiente menú:
ID dispositivo M0021Versión M0062Firmware M0077
Actualización del firmware mediante tarjeta SD
El menú Actualizar Firmware se muestra sólo si hay insertada una tarjeta SD en laranura para tarjetas de los mandos locales.
Nivel de usuario necesario: Servicio (5) o superior.
Config. dispositivo M0053Funciones de servicio M0222Actualizar Firmware M0564
13.8. Software de servicio
Con ayuda del software AUMA CDT para ordenadores de Windows (portátil o tablet)y con ayuda de la app AUMA Assistant para dispositivos Android, el actuadorpuede leer y seleccionar datos, cambiar ajustes y guardarlos. La conexión entre elordenador y el actuador AUMA se realiza sin cables mediante un interface Bluetooth.
114
Control de actuadorFunciones de servicio AC 01.2/ACExC 01.2
Con AUMA Cloud ofrecemos una plataforma interactiva con la que se puedenrecopilar y evaluar datos detallados de dispositivo de todos los actuadores de unainstalación.
AUMA CDT AUMA CDT es un programa de ajuste y manejo de fácil uso para controles deactuador AUMA.
La conexión entre el ordenador (portátil, tablet) y el control de actuador se realizasin cables mediante un interface Bluetooth.
El software AUMA CDT se puede descargar gratuitamente desde nuestra páginaweb www.auma.com.
AUMA CloudLa AUMA Cloud es el corazón del mundo digital de AUMA. Es una plataformainteractiva que permite organizar el mantenimiento de los actuadores AUMA deforma eficiente y orientada a los costes. En la AUMA Cloud se pueden recopilar losdatos del dispositivo de todos los actuadores de una instalación y representarlos deforma clara. Análisis detallados dan indicaciones sobre la necesidad de unmantenimiento. Funciones adicionales simplifican el Asset Management.
App AUMA Assistant La app AUMA Assistant se puede descargar gratuitamente de Google Play Store.
Figura 54: Enlace a Google Play Store
Activar/desactivar Bluetooth
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Bluetooth M0573
Valor por defecto: Función activaValores de ajuste:
Función no activa Función desactivada.
Función activa Función activada. Cuando la conexión está activa, luce el LED azul de los mandoslocales.
Direcciones y TAG de dispositivo
Nivel de usuario necesario: Especialista (4) o superior.
Diagnosis M0022Bluetooth M0244TAG Dispositivo M0423Dirección Bluetooth M0422Direcc.par. Bluetooth M0576
115
Control de actuadorAC 01.2/ACExC 01.2 Funciones de servicio
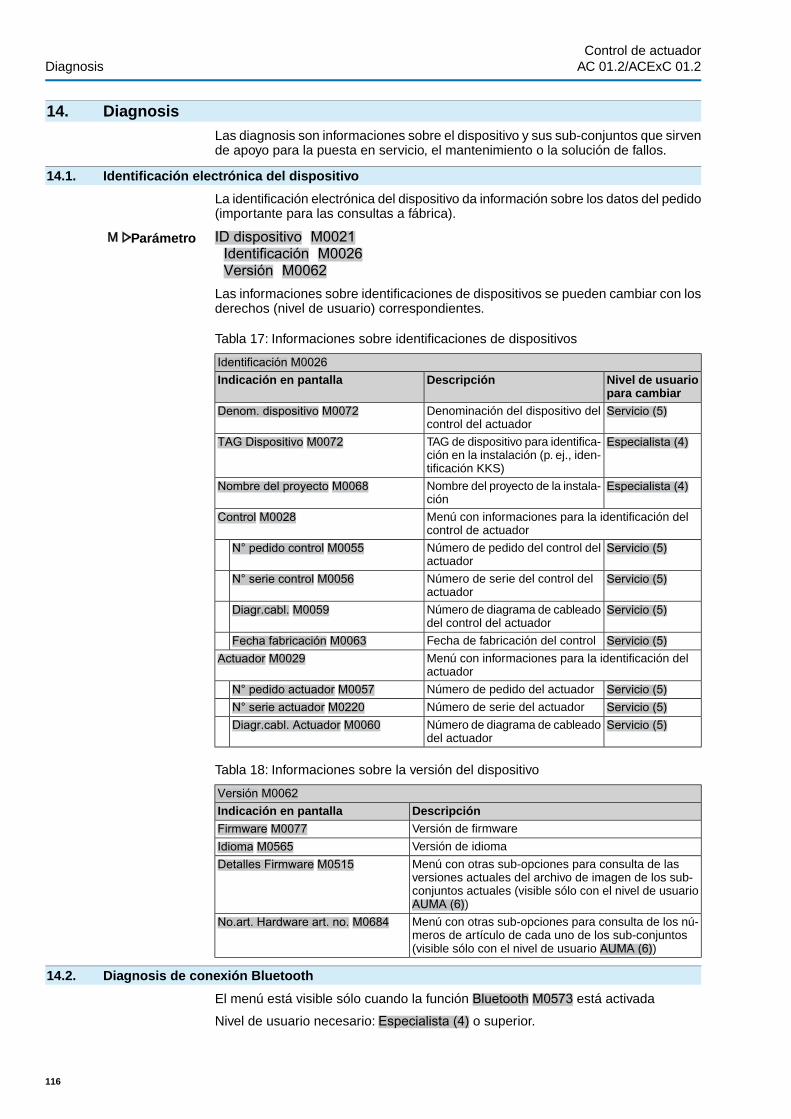
14. DiagnosisLas diagnosis son informaciones sobre el dispositivo y sus sub-conjuntos que sirvende apoyo para la puesta en servicio, el mantenimiento o la solución de fallos.
14.1. Identificación electrónica del dispositivo
La identificación electrónica del dispositivo da información sobre los datos del pedido(importante para las consultas a fábrica).
Parámetro ID dispositivo M0021Identificación M0026Versión M0062
Las informaciones sobre identificaciones de dispositivos se pueden cambiar con losderechos (nivel de usuario) correspondientes.
Tabla 17: Informaciones sobre identificaciones de dispositivos
Identificación M0026Nivel de usuariopara cambiar
DescripciónIndicación en pantalla
Servicio (5)Denominación del dispositivo delcontrol del actuador
Denom. dispositivo M0072
Especialista (4)TAG de dispositivo para identifica-ción en la instalación (p. ej., iden-tificación KKS)
TAG Dispositivo M0072
Especialista (4)Nombre del proyecto de la instala-ción
Nombre del proyecto M0068
Menú con informaciones para la identificación delcontrol de actuador
Control M0028
Servicio (5)Número de pedido del control delactuador
N° pedido control M0055
Servicio (5)Número de serie del control delactuador
N° serie control M0056
Servicio (5)Número de diagrama de cableadodel control del actuador
Diagr.cabl. M0059
Servicio (5)Fecha de fabricación del controlFecha fabricación M0063Menú con informaciones para la identificación delactuador
Actuador M0029
Servicio (5)Número de pedido del actuadorN° pedido actuador M0057Servicio (5)Número de serie del actuadorN° serie actuador M0220Servicio (5)Número de diagrama de cableado
del actuadorDiagr.cabl. Actuador M0060
Tabla 18: Informaciones sobre la versión del dispositivo
Versión M0062DescripciónIndicación en pantallaVersión de firmwareFirmware M0077Versión de idiomaIdioma M0565Menú con otras sub-opciones para consulta de lasversiones actuales del archivo de imagen de los sub-conjuntos actuales (visible sólo con el nivel de usuarioAUMA (6))
Detalles Firmware M0515
Menú con otras sub-opciones para consulta de los nú-meros de artículo de cada uno de los sub-conjuntos(visible sólo con el nivel de usuario AUMA (6))
No.art. Hardware art. no. M0684
14.2. Diagnosis de conexión Bluetooth
El menú está visible sólo cuando la función Bluetooth M0573 está activada
Nivel de usuario necesario: Especialista (4) o superior.
116
Control de actuadorDiagnosis AC 01.2/ACExC 01.2
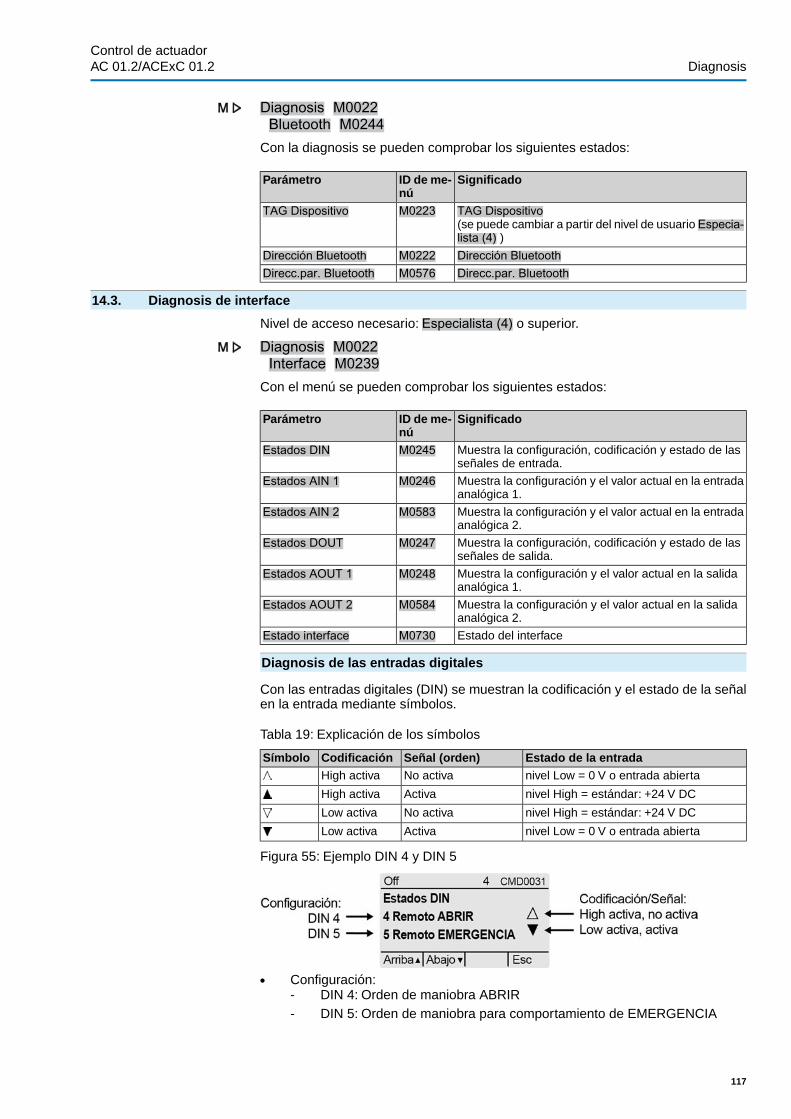
Diagnosis M0022Bluetooth M0244
Con la diagnosis se pueden comprobar los siguientes estados:
SignificadoID de me-nú
Parámetro
TAG Dispositivo(se puede cambiar a partir del nivel de usuario Especia-lista (4) )
M0223TAG Dispositivo
Dirección BluetoothM0222Dirección BluetoothDirecc.par. BluetoothM0576Direcc.par. Bluetooth
14.3. Diagnosis de interface
Nivel de acceso necesario: Especialista (4) o superior.
Diagnosis M0022Interface M0239
Con el menú se pueden comprobar los siguientes estados:
SignificadoID de me-nú
Parámetro
Muestra la configuración, codificación y estado de lasseñales de entrada.
M0245Estados DIN
Muestra la configuración y el valor actual en la entradaanalógica 1.
M0246Estados AIN 1
Muestra la configuración y el valor actual en la entradaanalógica 2.
M0583Estados AIN 2
Muestra la configuración, codificación y estado de lasseñales de salida.
M0247Estados DOUT
Muestra la configuración y el valor actual en la salidaanalógica 1.
M0248Estados AOUT 1
Muestra la configuración y el valor actual en la salidaanalógica 2.
M0584Estados AOUT 2
Estado del interfaceM0730Estado interface
Diagnosis de las entradas digitales
Con las entradas digitales (DIN) se muestran la codificación y el estado de la señalen la entrada mediante símbolos.
Tabla 19: Explicación de los símbolos
Estado de la entradaSeñal (orden)CodificaciónSímbolonivel Low = 0 V o entrada abiertaNo activaHigh activa
nivel High = estándar: +24 V DCActivaHigh activa
nivel High = estándar: +24 V DCNo activaLow activa
nivel Low = 0 V o entrada abiertaActivaLow activa
Figura 55: Ejemplo DIN 4 y DIN 5
● Configuración:- DIN 4: Orden de maniobra ABRIR- DIN 5: Orden de maniobra para comportamiento de EMERGENCIA
117
Control de actuadorAC 01.2/ACExC 01.2 Diagnosis
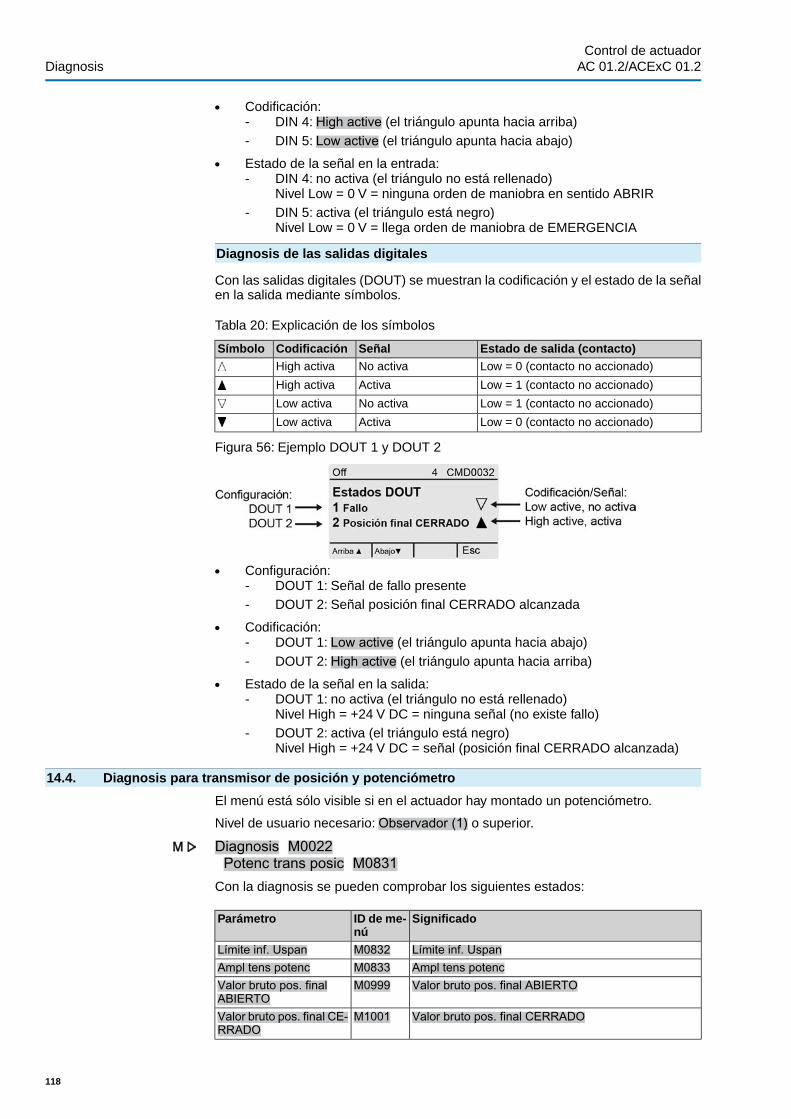
● Codificación:- DIN 4: High active (el triángulo apunta hacia arriba)- DIN 5: Low active (el triángulo apunta hacia abajo)
● Estado de la señal en la entrada:- DIN 4: no activa (el triángulo no está rellenado)
Nivel Low = 0 V = ninguna orden de maniobra en sentido ABRIR- DIN 5: activa (el triángulo está negro)
Nivel Low = 0 V = llega orden de maniobra de EMERGENCIA
Diagnosis de las salidas digitales
Con las salidas digitales (DOUT) se muestran la codificación y el estado de la señalen la salida mediante símbolos.
Tabla 20: Explicación de los símbolos
Estado de salida (contacto)SeñalCodificaciónSímboloLow = 0 (contacto no accionado)No activaHigh activa
Low = 1 (contacto no accionado)ActivaHigh activa
Low = 1 (contacto no accionado)No activaLow activa
Low = 0 (contacto no accionado)ActivaLow activa
Figura 56: Ejemplo DOUT 1 y DOUT 2
● Configuración:- DOUT 1: Señal de fallo presente- DOUT 2: Señal posición final CERRADO alcanzada
● Codificación:- DOUT 1: Low active (el triángulo apunta hacia abajo)- DOUT 2: High active (el triángulo apunta hacia arriba)
● Estado de la señal en la salida:- DOUT 1: no activa (el triángulo no está rellenado)
Nivel High = +24 V DC = ninguna señal (no existe fallo)- DOUT 2: activa (el triángulo está negro)
Nivel High = +24 V DC = señal (posición final CERRADO alcanzada)
14.4. Diagnosis para transmisor de posición y potenciómetro
El menú está sólo visible si en el actuador hay montado un potenciómetro.
Nivel de usuario necesario: Observador (1) o superior.
Diagnosis M0022Potenc trans posic M0831
Con la diagnosis se pueden comprobar los siguientes estados:
SignificadoID de me-nú
Parámetro
Límite inf. UspanM0832Límite inf. UspanAmpl tens potencM0833Ampl tens potencValor bruto pos. final ABIERTOM0999Valor bruto pos. final
ABIERTOValor bruto pos. final CERRADOM1001Valor bruto pos. final CE-
RRADO
118
Control de actuadorDiagnosis AC 01.2/ACExC 01.2
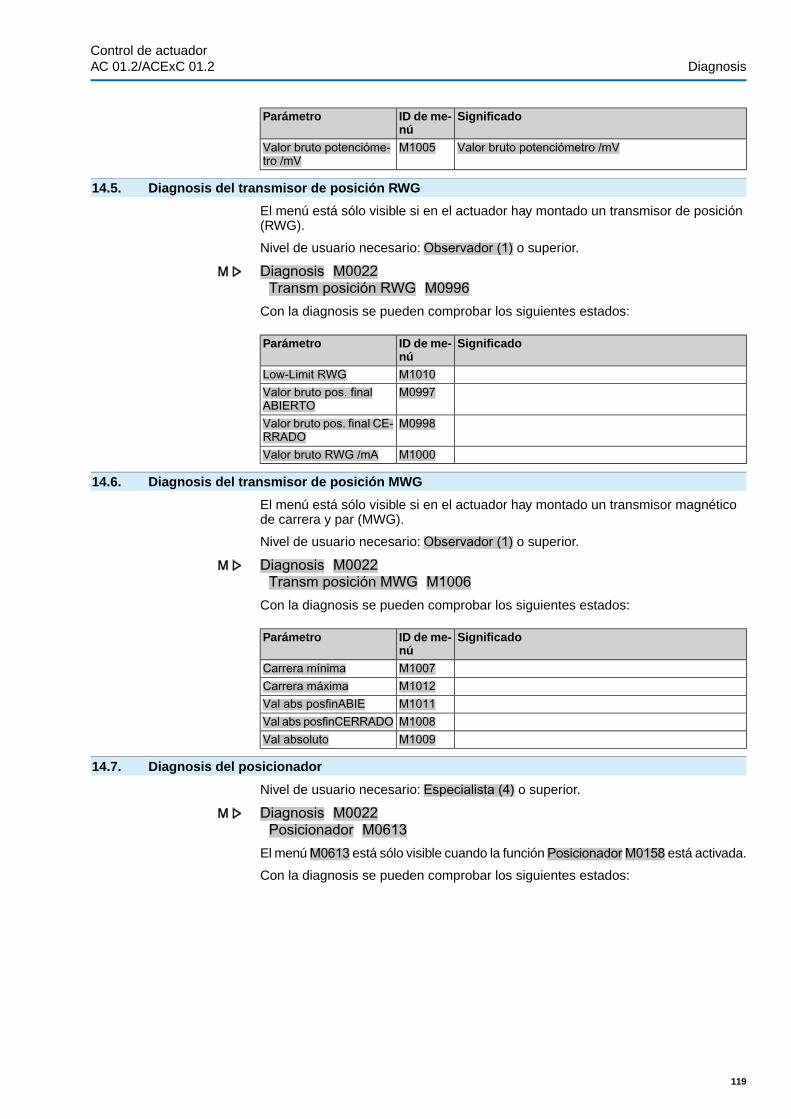
SignificadoID de me-nú
Parámetro
Valor bruto potenciómetro /mVM1005Valor bruto potencióme-tro /mV
14.5. Diagnosis del transmisor de posición RWG
El menú está sólo visible si en el actuador hay montado un transmisor de posición(RWG).
Nivel de usuario necesario: Observador (1) o superior.
Diagnosis M0022Transm posición RWG M0996
Con la diagnosis se pueden comprobar los siguientes estados:
SignificadoID de me-nú
Parámetro
M1010Low-Limit RWGM0997Valor bruto pos. final
ABIERTOM0998Valor bruto pos. final CE-
RRADOM1000Valor bruto RWG /mA
14.6. Diagnosis del transmisor de posición MWG
El menú está sólo visible si en el actuador hay montado un transmisor magnéticode carrera y par (MWG).
Nivel de usuario necesario: Observador (1) o superior.
Diagnosis M0022Transm posición MWG M1006
Con la diagnosis se pueden comprobar los siguientes estados:
SignificadoID de me-nú
Parámetro
M1007Carrera mínimaM1012Carrera máximaM1011Val abs posfinABIEM1008Val abs posfinCERRADOM1009Val absoluto
14.7. Diagnosis del posicionador
Nivel de usuario necesario: Especialista (4) o superior.
Diagnosis M0022Posicionador M0613
El menú M0613 está sólo visible cuando la función Posicionador M0158 está activada.
Con la diagnosis se pueden comprobar los siguientes estados:
119
Control de actuadorAC 01.2/ACExC 01.2 Diagnosis
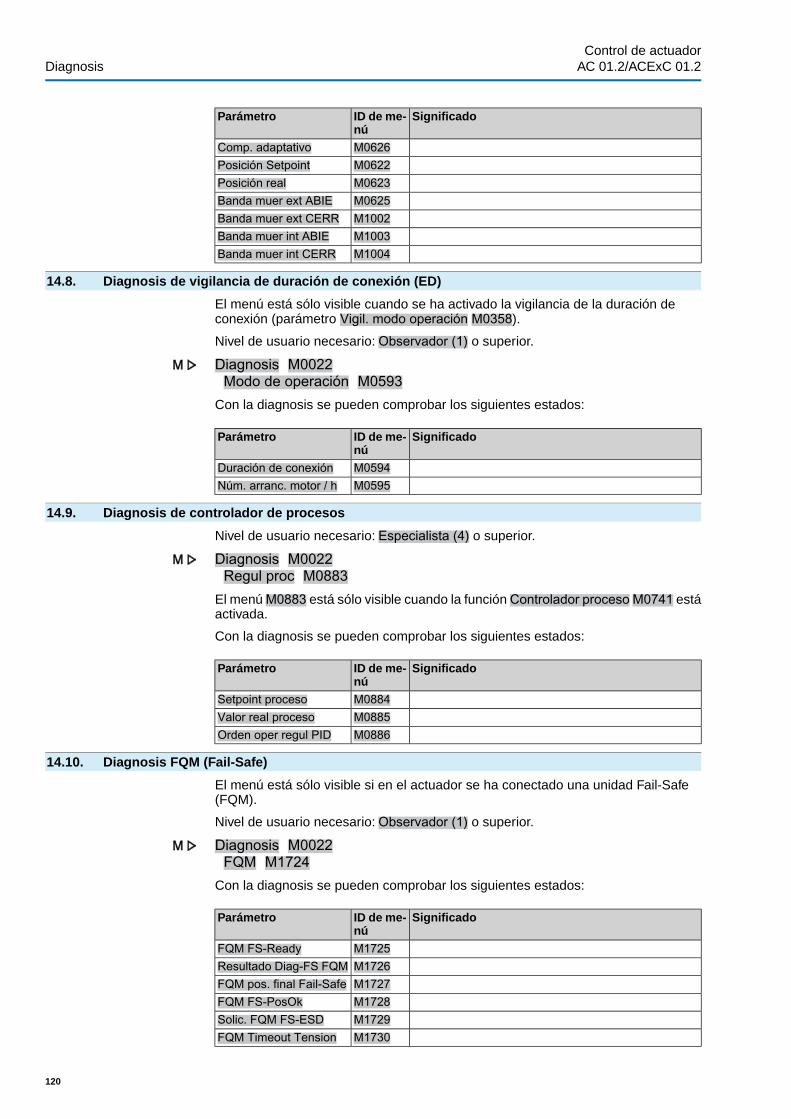
SignificadoID de me-nú
Parámetro
M0626Comp. adaptativoM0622Posición SetpointM0623Posición realM0625Banda muer ext ABIEM1002Banda muer ext CERRM1003Banda muer int ABIEM1004Banda muer int CERR
14.8. Diagnosis de vigilancia de duración de conexión (ED)
El menú está sólo visible cuando se ha activado la vigilancia de la duración deconexión (parámetro Vigil. modo operación M0358).
Nivel de usuario necesario: Observador (1) o superior.
Diagnosis M0022Modo de operación M0593
Con la diagnosis se pueden comprobar los siguientes estados:
SignificadoID de me-nú
Parámetro
M0594Duración de conexiónM0595Núm. arranc. motor / h
14.9. Diagnosis de controlador de procesos
Nivel de usuario necesario: Especialista (4) o superior.
Diagnosis M0022Regul proc M0883
El menú M0883 está sólo visible cuando la función Controlador proceso M0741 estáactivada.
Con la diagnosis se pueden comprobar los siguientes estados:
SignificadoID de me-nú
Parámetro
M0884Setpoint procesoM0885Valor real procesoM0886Orden oper regul PID
14.10. Diagnosis FQM (Fail-Safe)
El menú está sólo visible si en el actuador se ha conectado una unidad Fail-Safe(FQM).
Nivel de usuario necesario: Observador (1) o superior.
Diagnosis M0022FQM M1724
Con la diagnosis se pueden comprobar los siguientes estados:
SignificadoID de me-nú
Parámetro
M1725FQM FS-ReadyM1726Resultado Diag-FS FQMM1727FQM pos. final Fail-SafeM1728FQM FS-PosOkM1729Solic. FQM FS-ESDM1730FQM Timeout Tension
120
Control de actuadorDiagnosis AC 01.2/ACExC 01.2
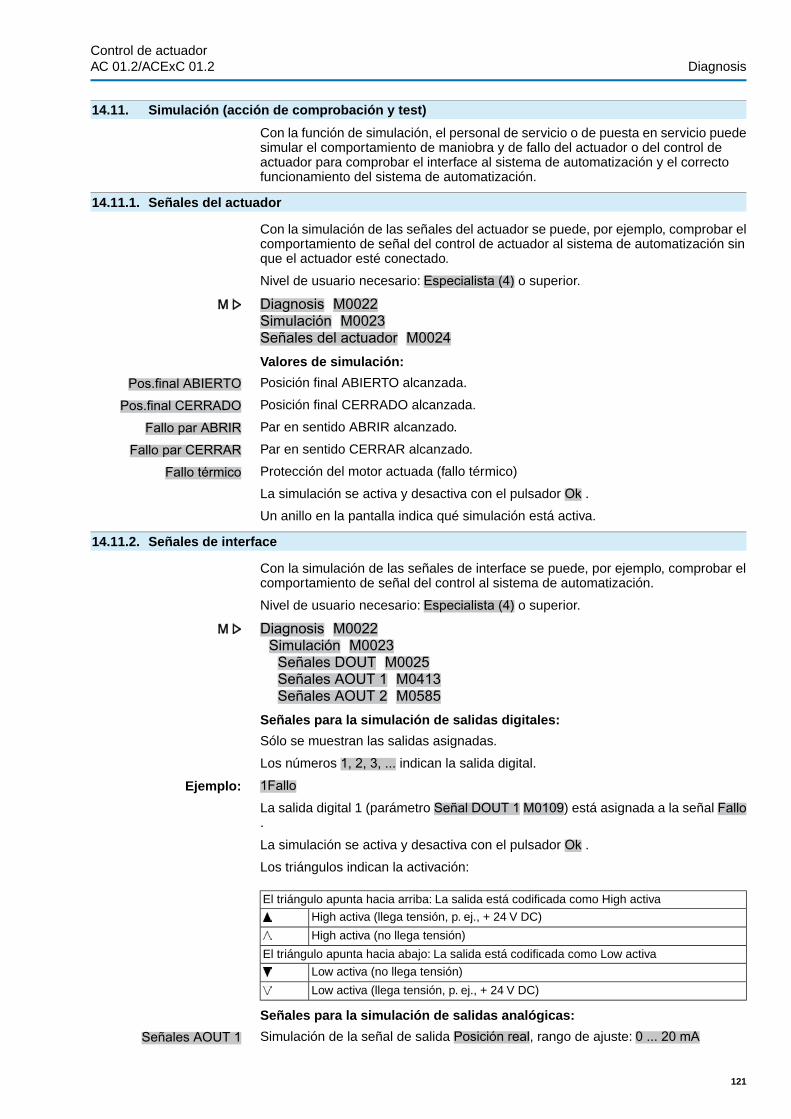
14.11. Simulación (acción de comprobación y test)
Con la función de simulación, el personal de servicio o de puesta en servicio puedesimular el comportamiento de maniobra y de fallo del actuador o del control deactuador para comprobar el interface al sistema de automatización y el correctofuncionamiento del sistema de automatización.
14.11.1. Señales del actuador
Con la simulación de las señales del actuador se puede, por ejemplo, comprobar elcomportamiento de señal del control de actuador al sistema de automatización sinque el actuador esté conectado.
Nivel de usuario necesario: Especialista (4) o superior.
Diagnosis M0022Simulación M0023Señales del actuador M0024Valores de simulación:
Pos.final ABIERTO Posición final ABIERTO alcanzada.
Pos.final CERRADO Posición final CERRADO alcanzada.
Fallo par ABRIR Par en sentido ABRIR alcanzado.
Fallo par CERRAR Par en sentido CERRAR alcanzado.
Fallo térmico Protección del motor actuada (fallo térmico)
La simulación se activa y desactiva con el pulsador Ok .
Un anillo en la pantalla indica qué simulación está activa.
14.11.2. Señales de interface
Con la simulación de las señales de interface se puede, por ejemplo, comprobar elcomportamiento de señal del control al sistema de automatización.
Nivel de usuario necesario: Especialista (4) o superior.
Diagnosis M0022Simulación M0023Señales DOUT M0025Señales AOUT 1 M0413Señales AOUT 2 M0585
Señales para la simulación de salidas digitales:
Sólo se muestran las salidas asignadas.
Los números 1, 2, 3, ... indican la salida digital.
Ejemplo: 1FalloLa salida digital 1 (parámetro Señal DOUT 1 M0109) está asignada a la señal Fallo.
La simulación se activa y desactiva con el pulsador Ok .
Los triángulos indican la activación:
El triángulo apunta hacia arriba: La salida está codificada como High activa
High activa (llega tensión, p. ej., + 24 V DC)
High activa (no llega tensión)
El triángulo apunta hacia abajo: La salida está codificada como Low activa
Low activa (no llega tensión)
Low activa (llega tensión, p. ej., + 24 V DC)
Señales para la simulación de salidas analógicas:
Señales AOUT 1 Simulación de la señal de salida Posición real, rango de ajuste: 0 ... 20 mA
121
Control de actuadorAC 01.2/ACExC 01.2 Diagnosis

Señales AOUT 2 Simulación de la señal de salida Par, rango de ajuste: 0 ... 20 mA
122
Control de actuadorDiagnosis AC 01.2/ACExC 01.2
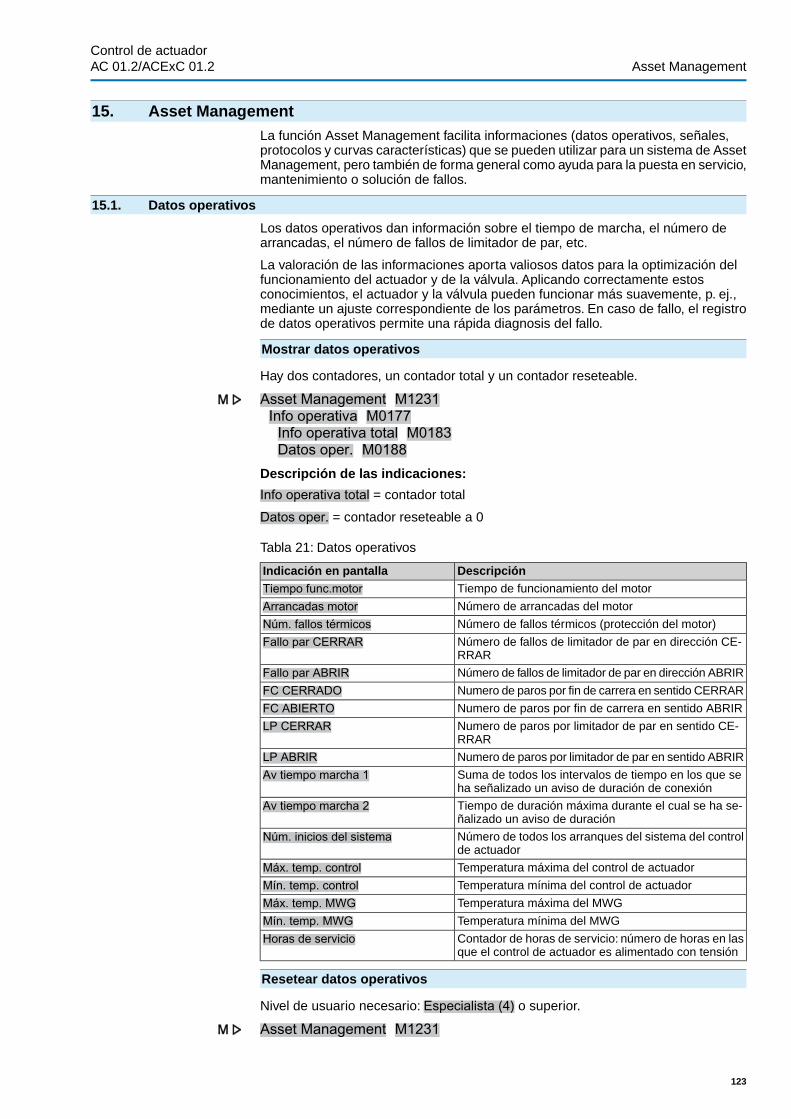
15. Asset ManagementLa función Asset Management facilita informaciones (datos operativos, señales,protocolos y curvas características) que se pueden utilizar para un sistema de AssetManagement, pero también de forma general como ayuda para la puesta en servicio,mantenimiento o solución de fallos.
15.1. Datos operativos
Los datos operativos dan información sobre el tiempo de marcha, el número dearrancadas, el número de fallos de limitador de par, etc.
La valoración de las informaciones aporta valiosos datos para la optimización delfuncionamiento del actuador y de la válvula. Aplicando correctamente estosconocimientos, el actuador y la válvula pueden funcionar más suavemente, p. ej.,mediante un ajuste correspondiente de los parámetros. En caso de fallo, el registrode datos operativos permite una rápida diagnosis del fallo.
Mostrar datos operativos
Hay dos contadores, un contador total y un contador reseteable.
Asset Management M1231Info operativa M0177Info operativa total M0183Datos oper. M0188
Descripción de las indicaciones:
Info operativa total = contador total
Datos oper. = contador reseteable a 0
Tabla 21: Datos operativos
DescripciónIndicación en pantallaTiempo de funcionamiento del motorTiempo func.motorNúmero de arrancadas del motorArrancadas motorNúmero de fallos térmicos (protección del motor)Núm. fallos térmicosNúmero de fallos de limitador de par en dirección CE-RRAR
Fallo par CERRAR
Número de fallos de limitador de par en dirección ABRIRFallo par ABRIRNumero de paros por fin de carrera en sentido CERRARFC CERRADONumero de paros por fin de carrera en sentido ABRIRFC ABIERTONumero de paros por limitador de par en sentido CE-RRAR
LP CERRAR
Numero de paros por limitador de par en sentido ABRIRLP ABRIRSuma de todos los intervalos de tiempo en los que seha señalizado un aviso de duración de conexión
Av tiempo marcha 1
Tiempo de duración máxima durante el cual se ha se-ñalizado un aviso de duración
Av tiempo marcha 2
Número de todos los arranques del sistema del controlde actuador
Núm. inicios del sistema
Temperatura máxima del control de actuadorMáx. temp. controlTemperatura mínima del control de actuadorMín. temp. controlTemperatura máxima del MWGMáx. temp. MWGTemperatura mínima del MWGMín. temp. MWGContador de horas de servicio: número de horas en lasque el control de actuador es alimentado con tensión
Horas de servicio
Resetear datos operativos
Nivel de usuario necesario: Especialista (4) o superior.
Asset Management M1231
123
Control de actuadorAC 01.2/ACExC 01.2 Asset Management
Info operativa M0177Reset datos operativos M0197
Las entradas del registro de datos operativos se pueden resetear (borrar) con estemenú.
15.2. Protocolo de eventos
Con el protocolo de eventos se protocolizan eventos del sistema y señales de estado.El protocolo de eventos se puede exportar a la tarjeta SD interna o se puede leercon el software AUMA CDT o en la app AUMA Assistant. Esto permite, p. ej., sacarconclusiones del funcionamiento anterior del actuador y de la válvula.
Información Como los eventos se protocolizan con un sello de tiempo, la fecha y la hora (pará-metro Fecha y hora M0221) deben estar correctamente ajustadas.
Filtro de eventos para eventos del sistema
El control de actuador protocoliza eventos del sistema, como por ejemplo, órdenesde maniobra o cambios en los ajustes de los parámetros. Mediante un filtro se definequé eventos del sistema se deben guardar en el protocolo de eventos.
Nivel de usuario necesario: AUMA (6).
Asset Management M1231Informe de eventos M0195Sistema filtro eventos M0334
Un evento se protocoliza (es decir, el filtro está activo) cuando en la pantalla se veun punto negro detrás del valor.
Eventos que se pueden protocolizar
Órdenes Todas las órdenes de maniobra que se han reconocido como válidas y han sidoejecutadas se protocolizan. El origen de la orden de maniobra se protocoliza también.
Parametrización Todos los cambios en los ajustes de los parámetros se protocolizan. Se guardantanto los valores antiguos, como los nuevos.
Habilitar procesos La habilitación de una función se protocoliza.
Eventos de sistema Todos los eventos del sistema importantes se protocolizan. Éstos son: inicios desistema, cambio de la fecha, descargas, cambio del filtro de eventos, reseteo dedatos operativos y conexión de la tensión de la red eléctrica.
Filtro de eventos para señales de estado
El control de actuador protocoliza señales de estado como por ejemplo, fallos, avisoso actuador en posición final CERRADO/ABIERTO. Mediante un filtro se define quéseñales de estado se deben guardar en el protocolo de eventos.
Nivel de usuario necesario: AUMA (6).
Asset Management M1231Informe de eventos M0195Eventos filtro eventos M0333
Un evento se protocoliza (es decir, el filtro está activo) cuando en la pantalla se veun punto negro detrás del valor.
Eventos que se pueden protocolizar
Los eventos que se pueden elegir aquí se describen en el capítulo <Señales de falloy avisos>.
Tamaño del archivo para el protocolo de eventos
El tamaño del archivo para el protocolo de eventos se puede cambiar paraprotocolizar más o menos eventos, según se desee. Cuando el archivo está lleno,los eventos más antiguos se sobrescriben, de modo que se protocolizan siemprelos últimos y actuales eventos.
Nivel de usuario necesario: AUMA (6).
124
Control de actuadorAsset Management AC 01.2/ACExC 01.2
Asset Management M1231Informe de eventos M0195Tam. arch. prot. eventos M0330
Valor por defecto: 548 [kByte]
Rango de ajuste: 1 ... 1 024 [kByte]
Con el rango de ajuste máx. de 1 024 kByte se pueden guardar 20 000 eventoscomo mínimo.
Información Algunos eventos se guardan en un área protegida contra la escritura. Éstos son, p.ej., cambios de parametrización, habilitaciones de funciones y determinadas funcionesespeciales.
Número de eventos en el buffer
Los eventos se guardan primero de forma intermedia en una RAM. Desde este bufferse escriben en el protocolo de eventos en función del ciclo de protocolo ajustado.Aquí se puede ajustar el número de eventos en el buffer.
Información En caso de fallo de tensión, los eventos del buffer se pierden.
Nivel de usuario necesario: AUMA (6).
Asset Management M1231Informe de eventos M0195Tamaño del buffer M0332
Valor por defecto: 50 [eventos]
Rango de ajuste: 10 ... 100 [eventos]
Intervalo de memoria
El protocolo de eventos se actualiza y guarda en un ciclo predeterminado. Este ciclo(intervalo guardar) se puede acortar o alargar.
Nivel de usuario necesario: AUMA (6).
Asset Management M1231Informe de eventos M0195Intervalo guardar M0331
Valor por defecto: 50.000Rango de ajuste: 1 000 ... 65 535 [ms]
15.3. Curvas características
15.3.1. Curva característica de par-carrera
Condiciones ● Actuadores con unidad de mando electrónica● Control de actuador (versión no intrusiva) a partir de versión de firmware
02.03.01
Propiedades Representación de la demanda de par en todo el recorrido de operación (resoluciónde 0,1 %). Con cada maniobra, el control de actuador registra continuamente lospares actuales.
Aplicación Mediante la comparación de dos curvas características (curva característica actualy curva característica archivada) se pueden sacar conclusiones sobre el desgasteen la válvula o en el actuador.
Mostrar la curva característica de par-carrera
Asset Management M1231Curvas M0313Par-Carrera M1229Curvas características M0546
125
Control de actuadorAC 01.2/ACExC 01.2 Asset Management
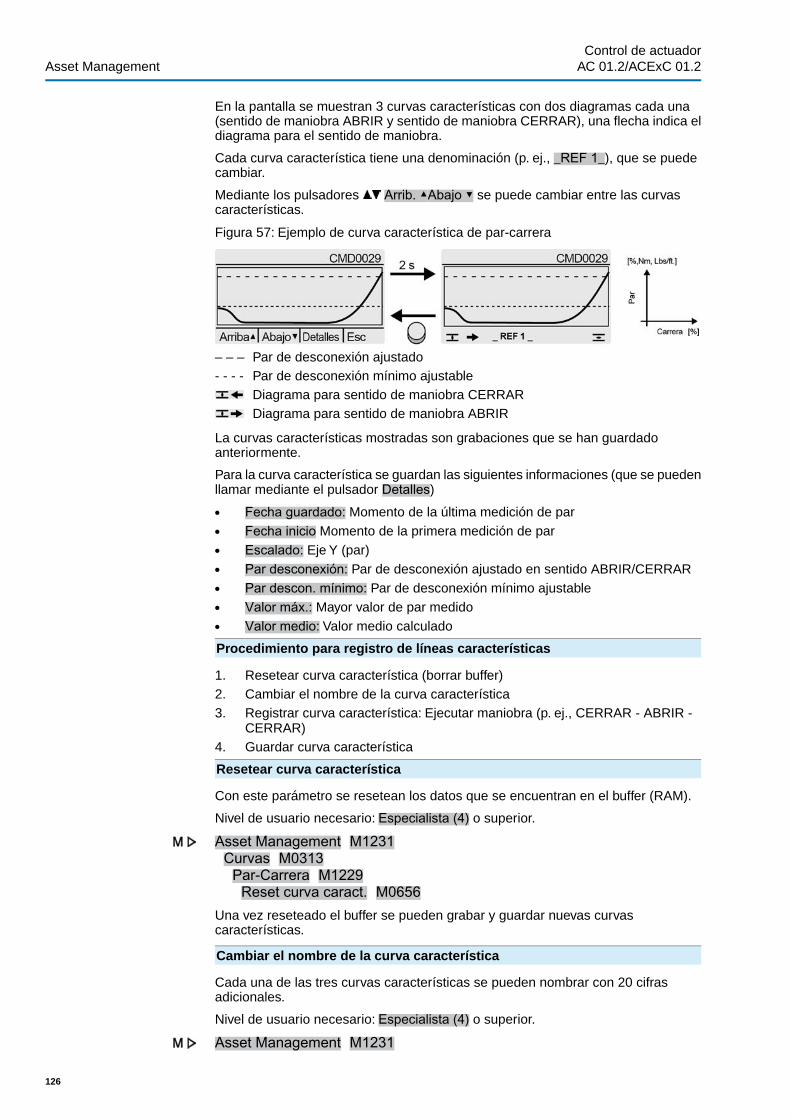
En la pantalla se muestran 3 curvas características con dos diagramas cada una(sentido de maniobra ABRIR y sentido de maniobra CERRAR), una flecha indica eldiagrama para el sentido de maniobra.
Cada curva característica tiene una denominación (p. ej., _REF 1_), que se puedecambiar.
Mediante los pulsadores Arrib. ▲Abajo ▼ se puede cambiar entre las curvascaracterísticas.
Figura 57: Ejemplo de curva característica de par-carrera
– – – Par de desconexión ajustado- - - - Par de desconexión mínimo ajustable
Diagrama para sentido de maniobra CERRARDiagrama para sentido de maniobra ABRIR
La curvas características mostradas son grabaciones que se han guardadoanteriormente.
Para la curva característica se guardan las siguientes informaciones (que se puedenllamar mediante el pulsador Detalles)
● Fecha guardado: Momento de la última medición de par● Fecha inicio Momento de la primera medición de par● Escalado: Eje Y (par)● Par desconexión: Par de desconexión ajustado en sentido ABRIR/CERRAR● Par descon. mínimo: Par de desconexión mínimo ajustable● Valor máx.: Mayor valor de par medido● Valor medio: Valor medio calculado
Procedimiento para registro de líneas características
1. Resetear curva característica (borrar buffer)2. Cambiar el nombre de la curva característica3. Registrar curva característica: Ejecutar maniobra (p. ej., CERRAR - ABRIR -
CERRAR)4. Guardar curva característica
Resetear curva característica
Con este parámetro se resetean los datos que se encuentran en el buffer (RAM).
Nivel de usuario necesario: Especialista (4) o superior.
Asset Management M1231Curvas M0313Par-Carrera M1229Reset curva caract. M0656
Una vez reseteado el buffer se pueden grabar y guardar nuevas curvascaracterísticas.
Cambiar el nombre de la curva característica
Cada una de las tres curvas características se pueden nombrar con 20 cifrasadicionales.
Nivel de usuario necesario: Especialista (4) o superior.
Asset Management M1231
126
Control de actuadorAsset Management AC 01.2/ACExC 01.2
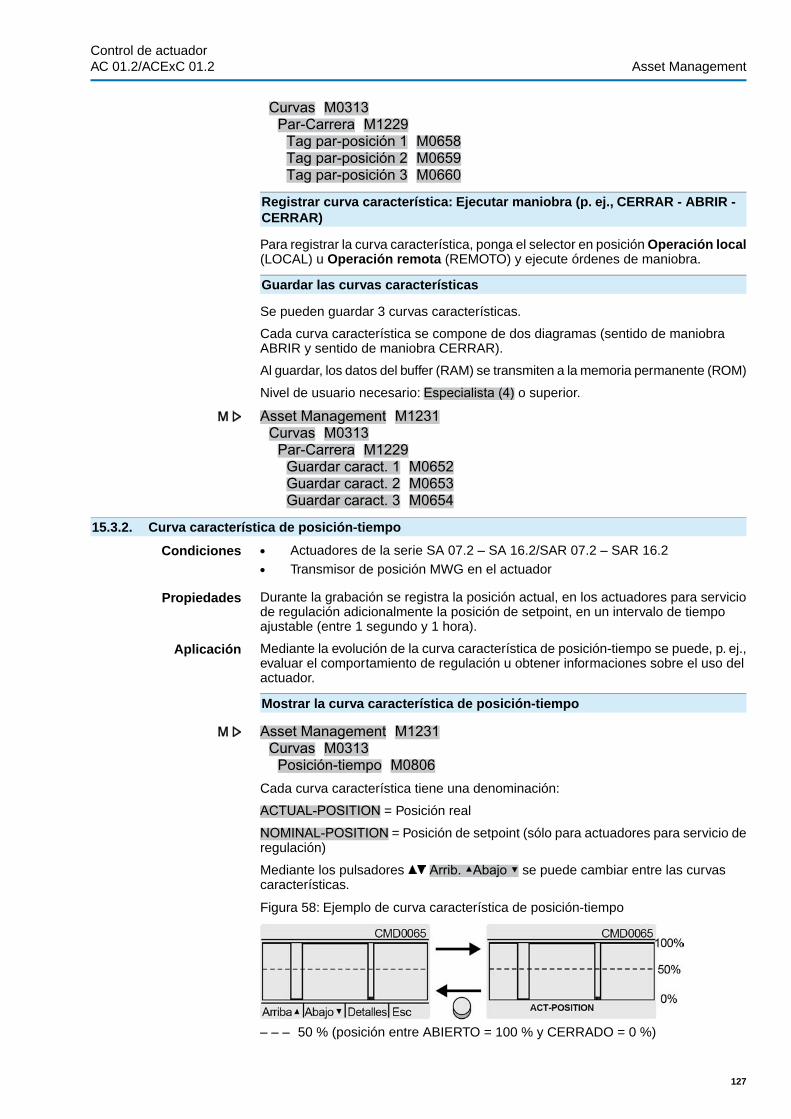
Curvas M0313Par-Carrera M1229Tag par-posición 1 M0658Tag par-posición 2 M0659Tag par-posición 3 M0660
Registrar curva característica: Ejecutar maniobra (p. ej., CERRAR - ABRIR -CERRAR)
Para registrar la curva característica, ponga el selector en posición Operación local(LOCAL) u Operación remota (REMOTO) y ejecute órdenes de maniobra.
Guardar las curvas características
Se pueden guardar 3 curvas características.
Cada curva característica se compone de dos diagramas (sentido de maniobraABRIR y sentido de maniobra CERRAR).
Al guardar, los datos del buffer (RAM) se transmiten a la memoria permanente (ROM)
Nivel de usuario necesario: Especialista (4) o superior.
Asset Management M1231Curvas M0313Par-Carrera M1229Guardar caract. 1 M0652Guardar caract. 2 M0653Guardar caract. 3 M0654
15.3.2. Curva característica de posición-tiempo
Condiciones ● Actuadores de la serie SA 07.2 – SA 16.2/SAR 07.2 – SAR 16.2● Transmisor de posición MWG en el actuador
Propiedades Durante la grabación se registra la posición actual, en los actuadores para serviciode regulación adicionalmente la posición de setpoint, en un intervalo de tiempoajustable (entre 1 segundo y 1 hora).
Aplicación Mediante la evolución de la curva característica de posición-tiempo se puede, p. ej.,evaluar el comportamiento de regulación u obtener informaciones sobre el uso delactuador.
Mostrar la curva característica de posición-tiempo
Asset Management M1231Curvas M0313Posición-tiempo M0806
Cada curva característica tiene una denominación:
ACTUAL-POSITION = Posición real
NOMINAL-POSITION = Posición de setpoint (sólo para actuadores para servicio deregulación)
Mediante los pulsadores Arrib. ▲Abajo ▼ se puede cambiar entre las curvascaracterísticas.
Figura 58: Ejemplo de curva característica de posición-tiempo
– – – 50 % (posición entre ABIERTO = 100 % y CERRADO = 0 %)
127
Control de actuadorAC 01.2/ACExC 01.2 Asset Management
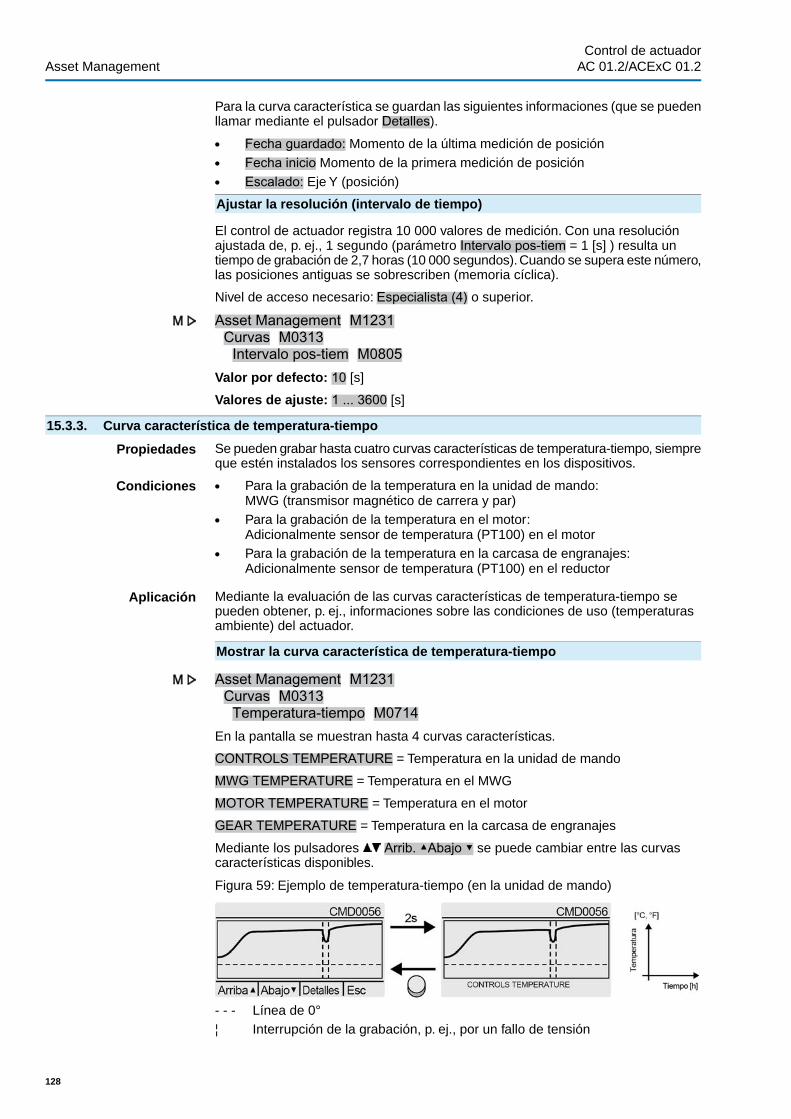
Para la curva característica se guardan las siguientes informaciones (que se puedenllamar mediante el pulsador Detalles).
● Fecha guardado: Momento de la última medición de posición● Fecha inicio Momento de la primera medición de posición● Escalado: Eje Y (posición)
Ajustar la resolución (intervalo de tiempo)
El control de actuador registra 10 000 valores de medición. Con una resoluciónajustada de, p. ej., 1 segundo (parámetro Intervalo pos-tiem = 1 [s] ) resulta untiempo de grabación de 2,7 horas (10 000 segundos). Cuando se supera este número,las posiciones antiguas se sobrescriben (memoria cíclica).
Nivel de acceso necesario: Especialista (4) o superior.
Asset Management M1231Curvas M0313Intervalo pos-tiem M0805
Valor por defecto: 10 [s]
Valores de ajuste: 1 ... 3600 [s]
15.3.3. Curva característica de temperatura-tiempo
Propiedades Se pueden grabar hasta cuatro curvas características de temperatura-tiempo, siempreque estén instalados los sensores correspondientes en los dispositivos.
Condiciones ● Para la grabación de la temperatura en la unidad de mando:MWG (transmisor magnético de carrera y par)
● Para la grabación de la temperatura en el motor:Adicionalmente sensor de temperatura (PT100) en el motor
● Para la grabación de la temperatura en la carcasa de engranajes:Adicionalmente sensor de temperatura (PT100) en el reductor
Aplicación Mediante la evaluación de las curvas características de temperatura-tiempo sepueden obtener, p. ej., informaciones sobre las condiciones de uso (temperaturasambiente) del actuador.
Mostrar la curva característica de temperatura-tiempo
Asset Management M1231Curvas M0313Temperatura-tiempo M0714
En la pantalla se muestran hasta 4 curvas características.
CONTROLS TEMPERATURE = Temperatura en la unidad de mando
MWG TEMPERATURE = Temperatura en el MWG
MOTOR TEMPERATURE = Temperatura en el motor
GEAR TEMPERATURE = Temperatura en la carcasa de engranajes
Mediante los pulsadores Arrib. ▲Abajo ▼ se puede cambiar entre las curvascaracterísticas disponibles.
Figura 59: Ejemplo de temperatura-tiempo (en la unidad de mando)
- - - Línea de 0°¦ Interrupción de la grabación, p. ej., por un fallo de tensión
128
Control de actuadorAsset Management AC 01.2/ACExC 01.2
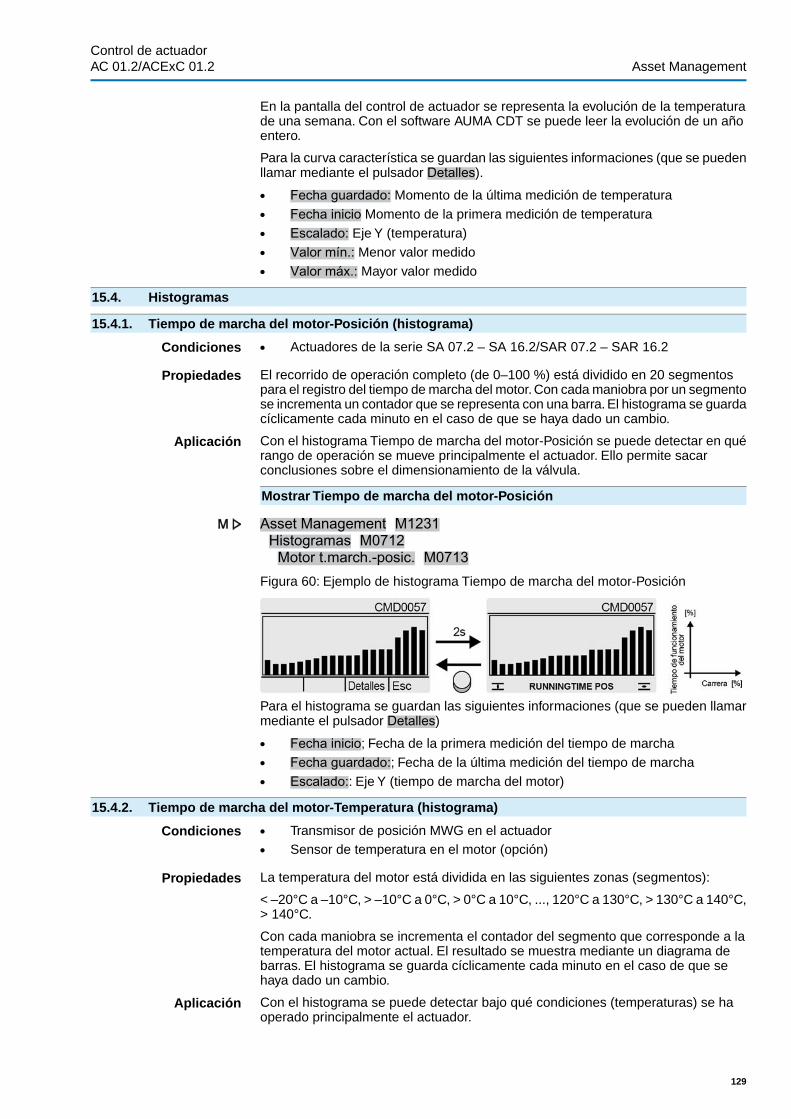
En la pantalla del control de actuador se representa la evolución de la temperaturade una semana. Con el software AUMA CDT se puede leer la evolución de un añoentero.
Para la curva característica se guardan las siguientes informaciones (que se puedenllamar mediante el pulsador Detalles).
● Fecha guardado: Momento de la última medición de temperatura● Fecha inicio Momento de la primera medición de temperatura● Escalado: Eje Y (temperatura)● Valor mín.: Menor valor medido● Valor máx.: Mayor valor medido
15.4. Histogramas
15.4.1. Tiempo de marcha del motor-Posición (histograma)
Condiciones ● Actuadores de la serie SA 07.2 – SA 16.2/SAR 07.2 – SAR 16.2
Propiedades El recorrido de operación completo (de 0–100 %) está dividido en 20 segmentospara el registro del tiempo de marcha del motor. Con cada maniobra por un segmentose incrementa un contador que se representa con una barra. El histograma se guardacíclicamente cada minuto en el caso de que se haya dado un cambio.
Aplicación Con el histograma Tiempo de marcha del motor-Posición se puede detectar en quérango de operación se mueve principalmente el actuador. Ello permite sacarconclusiones sobre el dimensionamiento de la válvula.
Mostrar Tiempo de marcha del motor-Posición
Asset Management M1231Histogramas M0712Motor t.march.-posic. M0713
Figura 60: Ejemplo de histograma Tiempo de marcha del motor-Posición
Para el histograma se guardan las siguientes informaciones (que se pueden llamarmediante el pulsador Detalles)
● Fecha inicio; Fecha de la primera medición del tiempo de marcha● Fecha guardado:; Fecha de la última medición del tiempo de marcha● Escalado:: Eje Y (tiempo de marcha del motor)
15.4.2. Tiempo de marcha del motor-Temperatura (histograma)
Condiciones ● Transmisor de posición MWG en el actuador● Sensor de temperatura en el motor (opción)
Propiedades La temperatura del motor está dividida en las siguientes zonas (segmentos):
< –20°C a –10°C, > –10°C a 0°C, > 0°C a 10°C, ..., 120°C a 130°C, > 130°C a 140°C,> 140°C.
Con cada maniobra se incrementa el contador del segmento que corresponde a latemperatura del motor actual. El resultado se muestra mediante un diagrama debarras. El histograma se guarda cíclicamente cada minuto en el caso de que sehaya dado un cambio.
Aplicación Con el histograma se puede detectar bajo qué condiciones (temperaturas) se haoperado principalmente el actuador.
129
Control de actuadorAC 01.2/ACExC 01.2 Asset Management
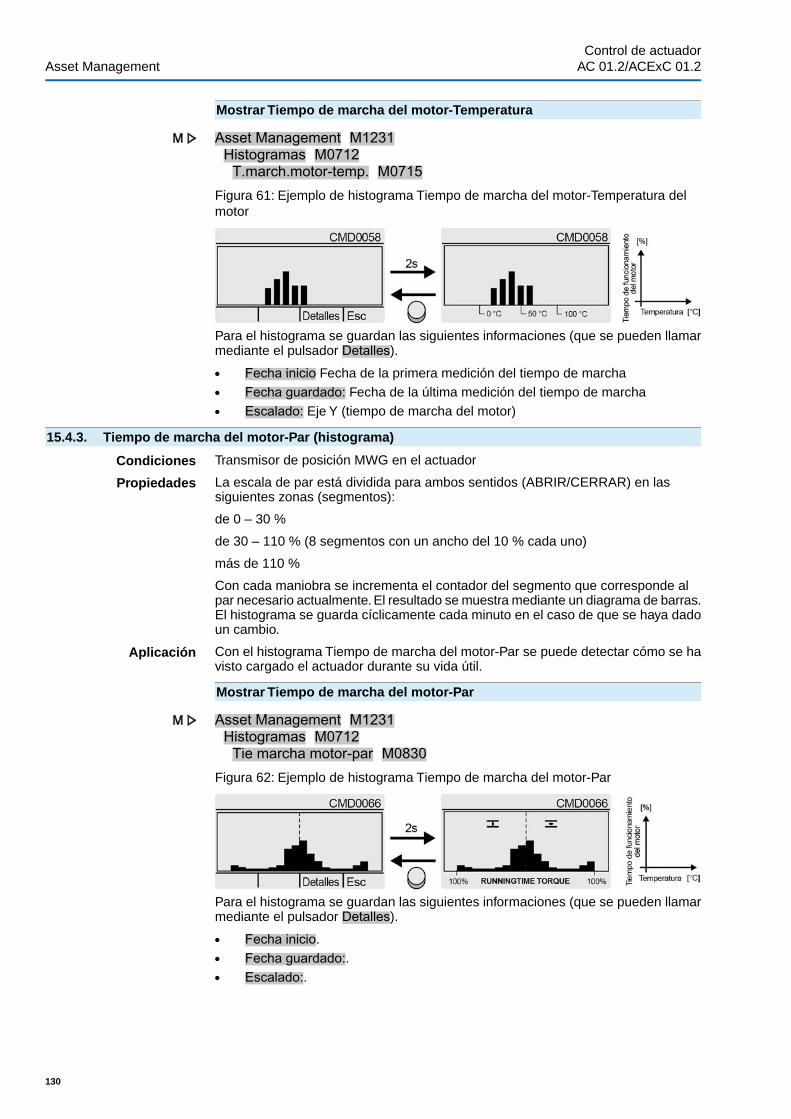
Mostrar Tiempo de marcha del motor-Temperatura
Asset Management M1231Histogramas M0712T.march.motor-temp. M0715
Figura 61: Ejemplo de histograma Tiempo de marcha del motor-Temperatura delmotor
Para el histograma se guardan las siguientes informaciones (que se pueden llamarmediante el pulsador Detalles).
● Fecha inicio Fecha de la primera medición del tiempo de marcha● Fecha guardado: Fecha de la última medición del tiempo de marcha● Escalado: Eje Y (tiempo de marcha del motor)
15.4.3. Tiempo de marcha del motor-Par (histograma)
Condiciones Transmisor de posición MWG en el actuador
Propiedades La escala de par está dividida para ambos sentidos (ABRIR/CERRAR) en lassiguientes zonas (segmentos):
de 0 – 30 %
de 30 – 110 % (8 segmentos con un ancho del 10 % cada uno)
más de 110 %
Con cada maniobra se incrementa el contador del segmento que corresponde alpar necesario actualmente. El resultado se muestra mediante un diagrama de barras.El histograma se guarda cíclicamente cada minuto en el caso de que se haya dadoun cambio.
Aplicación Con el histograma Tiempo de marcha del motor-Par se puede detectar cómo se havisto cargado el actuador durante su vida útil.
Mostrar Tiempo de marcha del motor-Par
Asset Management M1231Histogramas M0712Tie marcha motor-par M0830
Figura 62: Ejemplo de histograma Tiempo de marcha del motor-Par
Para el histograma se guardan las siguientes informaciones (que se pueden llamarmediante el pulsador Detalles).
● Fecha inicio.● Fecha guardado:.● Escalado:.
130
Control de actuadorAsset Management AC 01.2/ACExC 01.2
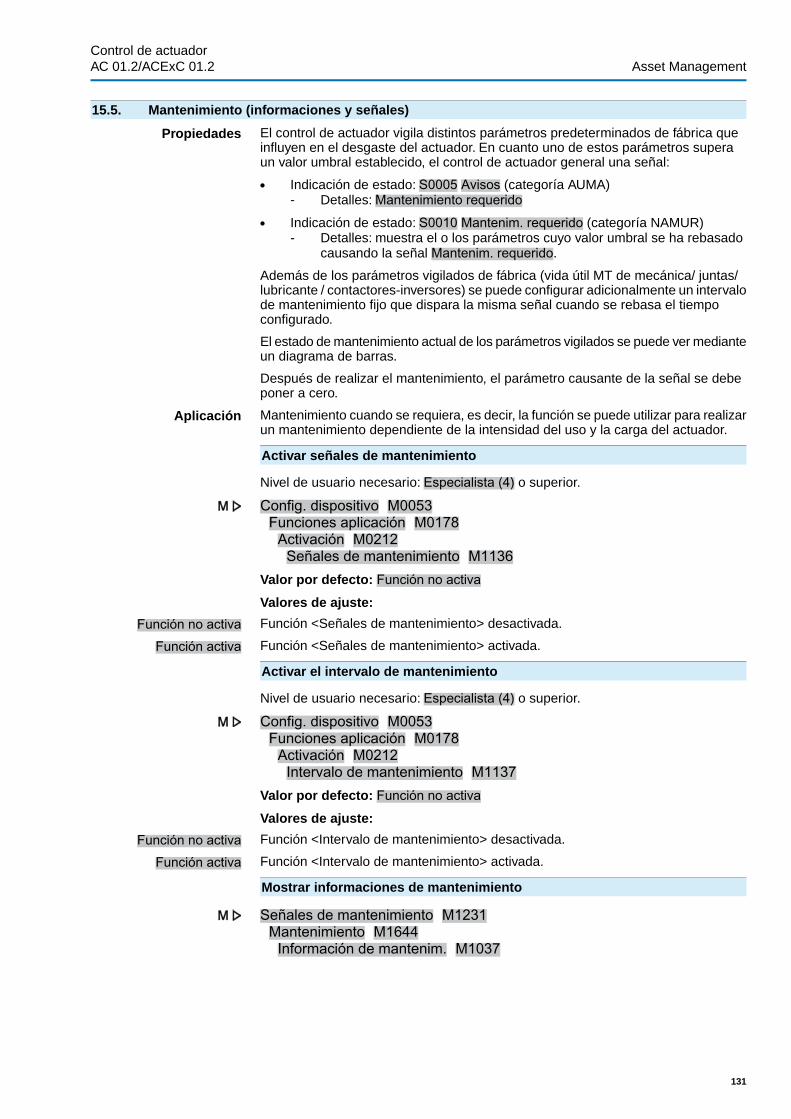
15.5. Mantenimiento (informaciones y señales)
Propiedades El control de actuador vigila distintos parámetros predeterminados de fábrica queinfluyen en el desgaste del actuador. En cuanto uno de estos parámetros superaun valor umbral establecido, el control de actuador general una señal:
● Indicación de estado: S0005 Avisos (categoría AUMA)- Detalles: Mantenimiento requerido
● Indicación de estado: S0010 Mantenim. requerido (categoría NAMUR)- Detalles: muestra el o los parámetros cuyo valor umbral se ha rebasado
causando la señal Mantenim. requerido.
Además de los parámetros vigilados de fábrica (vida útil MT de mecánica/ juntas/lubricante / contactores-inversores) se puede configurar adicionalmente un intervalode mantenimiento fijo que dispara la misma señal cuando se rebasa el tiempoconfigurado.
El estado de mantenimiento actual de los parámetros vigilados se puede ver medianteun diagrama de barras.
Después de realizar el mantenimiento, el parámetro causante de la señal se debeponer a cero.
Aplicación Mantenimiento cuando se requiera, es decir, la función se puede utilizar para realizarun mantenimiento dependiente de la intensidad del uso y la carga del actuador.
Activar señales de mantenimiento
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Señales de mantenimiento M1136
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Señales de mantenimiento> desactivada.
Función activa Función <Señales de mantenimiento> activada.
Activar el intervalo de mantenimiento
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212Intervalo de mantenimiento M1137
Valor por defecto: Función no activaValores de ajuste:
Función no activa Función <Intervalo de mantenimiento> desactivada.
Función activa Función <Intervalo de mantenimiento> activada.
Mostrar informaciones de mantenimiento
Señales de mantenimiento M1231Mantenimiento M1644Información de mantenim. M1037
131
Control de actuadorAC 01.2/ACExC 01.2 Asset Management
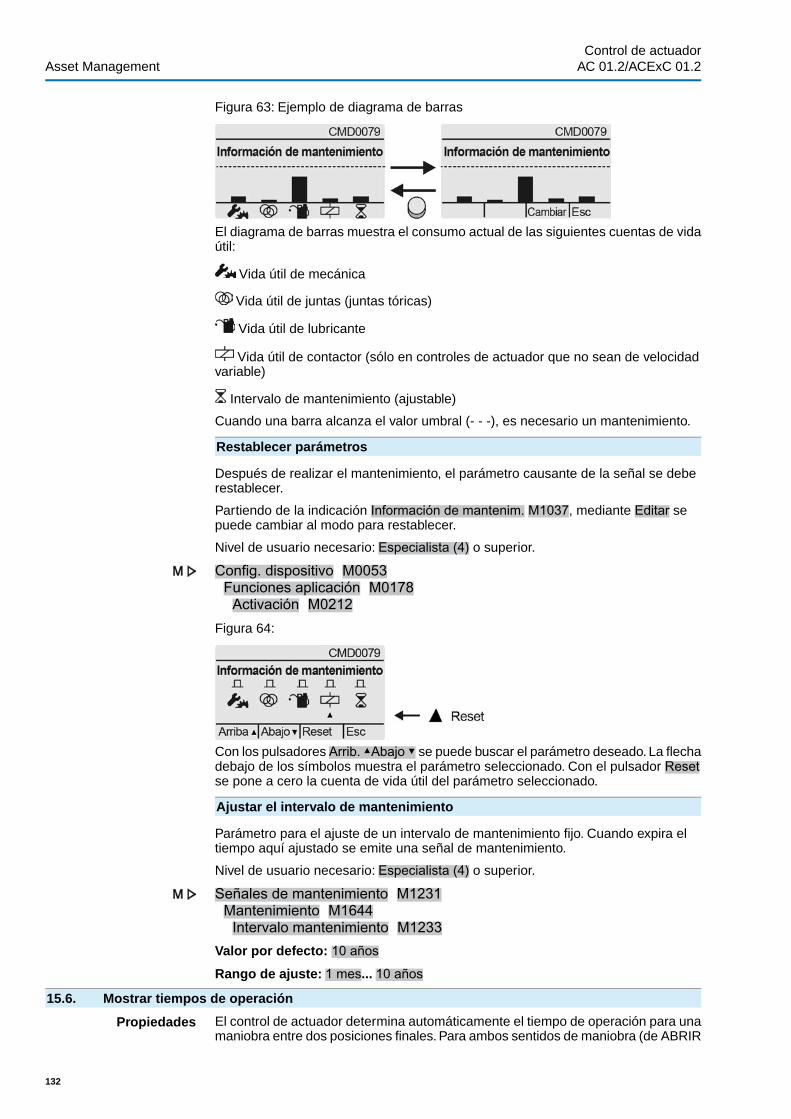
Figura 63: Ejemplo de diagrama de barras
El diagrama de barras muestra el consumo actual de las siguientes cuentas de vidaútil:
Vida útil de mecánica
Vida útil de juntas (juntas tóricas)
Vida útil de lubricante
Vida útil de contactor (sólo en controles de actuador que no sean de velocidadvariable)
Intervalo de mantenimiento (ajustable)
Cuando una barra alcanza el valor umbral (- - -), es necesario un mantenimiento.
Restablecer parámetros
Después de realizar el mantenimiento, el parámetro causante de la señal se deberestablecer.
Partiendo de la indicación Información de mantenim. M1037, mediante Editar sepuede cambiar al modo para restablecer.
Nivel de usuario necesario: Especialista (4) o superior.
Config. dispositivo M0053Funciones aplicación M0178Activación M0212
Figura 64:
Con los pulsadores Arrib. ▲Abajo ▼ se puede buscar el parámetro deseado. La flechadebajo de los símbolos muestra el parámetro seleccionado. Con el pulsador Resetse pone a cero la cuenta de vida útil del parámetro seleccionado.
Ajustar el intervalo de mantenimiento
Parámetro para el ajuste de un intervalo de mantenimiento fijo. Cuando expira eltiempo aquí ajustado se emite una señal de mantenimiento.
Nivel de usuario necesario: Especialista (4) o superior.
Señales de mantenimiento M1231Mantenimiento M1644Intervalo mantenimiento M1233
Valor por defecto: 10 añosRango de ajuste: 1 mes... 10 años
15.6. Mostrar tiempos de operación
Propiedades El control de actuador determina automáticamente el tiempo de operación para unamaniobra entre dos posiciones finales. Para ambos sentidos de maniobra (de ABRIR
132
Control de actuadorAsset Management AC 01.2/ACExC 01.2
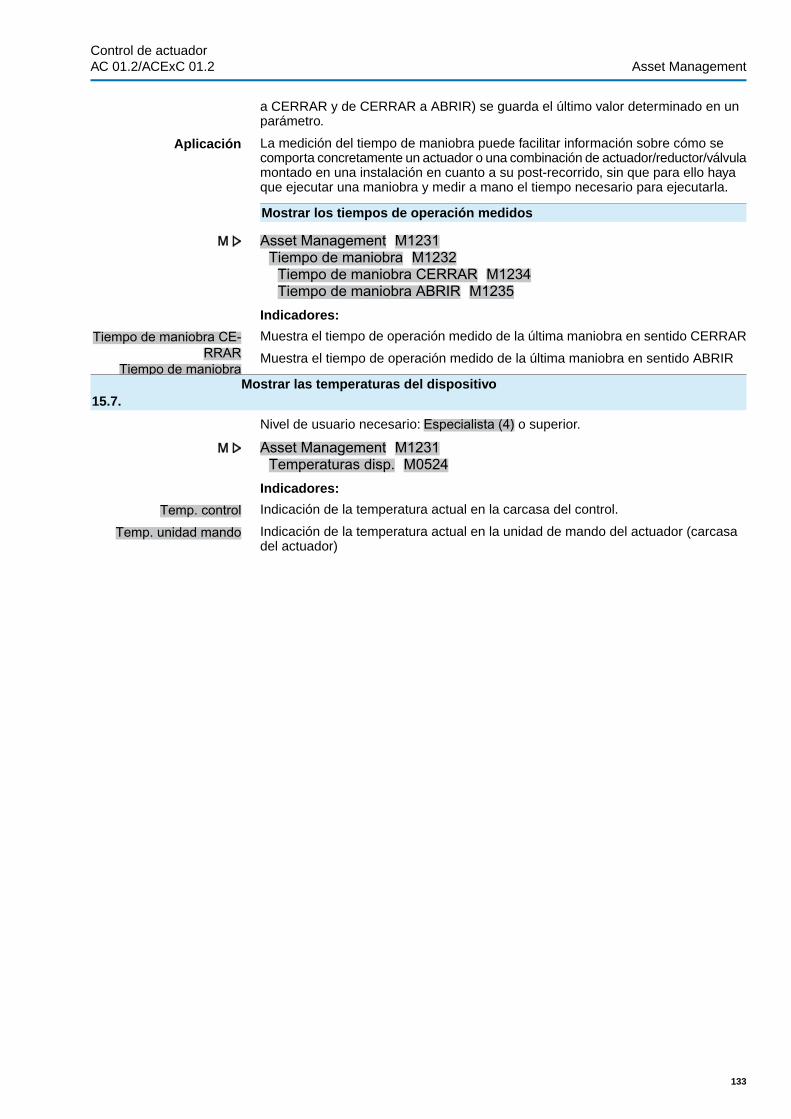
a CERRAR y de CERRAR a ABRIR) se guarda el último valor determinado en unparámetro.
Aplicación La medición del tiempo de maniobra puede facilitar información sobre cómo secomporta concretamente un actuador o una combinación de actuador/reductor/válvulamontado en una instalación en cuanto a su post-recorrido, sin que para ello hayaque ejecutar una maniobra y medir a mano el tiempo necesario para ejecutarla.
Mostrar los tiempos de operación medidos
Asset Management M1231Tiempo de maniobra M1232Tiempo de maniobra CERRAR M1234Tiempo de maniobra ABRIR M1235
Indicadores:
Tiempo de maniobra CE-RRAR
Muestra el tiempo de operación medido de la última maniobra en sentido CERRAR
Tiempo de maniobraABRIR
Muestra el tiempo de operación medido de la última maniobra en sentido ABRIR
15.7.Mostrar las temperaturas del dispositivo
Nivel de usuario necesario: Especialista (4) o superior.
Asset Management M1231Temperaturas disp. M0524
Indicadores:
Temp. control Indicación de la temperatura actual en la carcasa del control.
Temp. unidad mando Indicación de la temperatura actual en la unidad de mando del actuador (carcasadel actuador)
133
Control de actuadorAC 01.2/ACExC 01.2 Asset Management
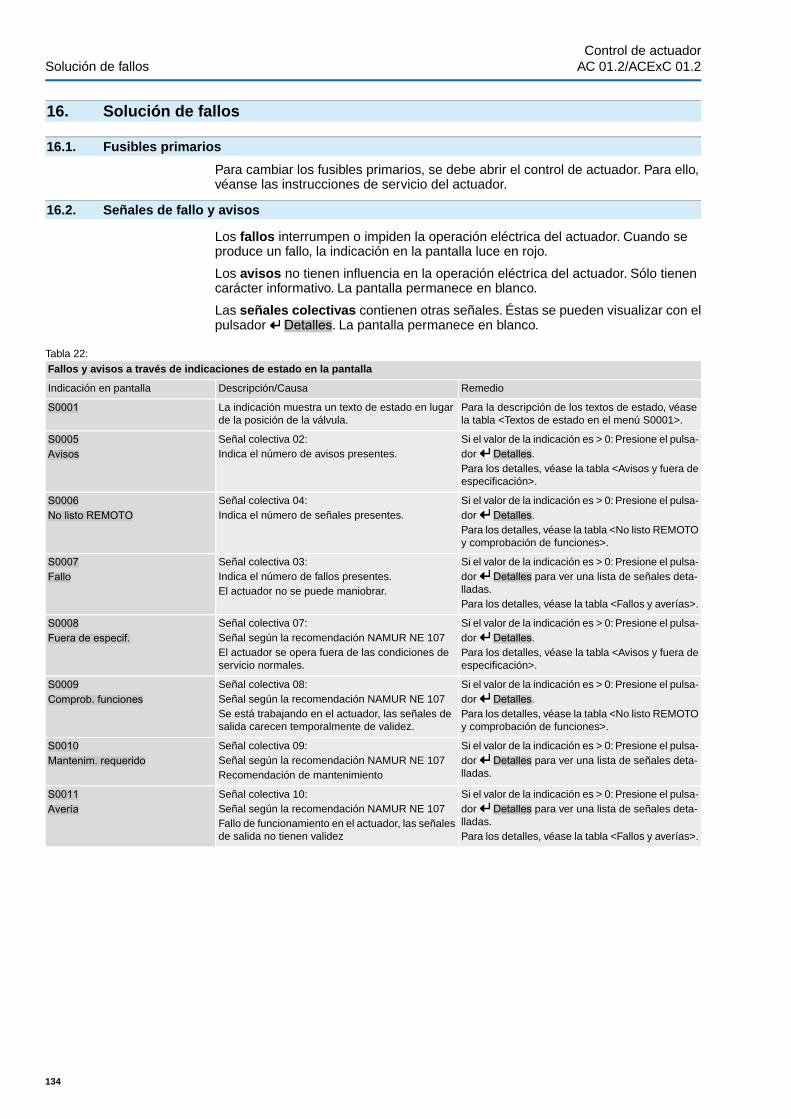
16. Solución de fallos
16.1. Fusibles primarios
Para cambiar los fusibles primarios, se debe abrir el control de actuador. Para ello,véanse las instrucciones de servicio del actuador.
16.2. Señales de fallo y avisos
Los fallos interrumpen o impiden la operación eléctrica del actuador. Cuando seproduce un fallo, la indicación en la pantalla luce en rojo.
Los avisos no tienen influencia en la operación eléctrica del actuador. Sólo tienencarácter informativo. La pantalla permanece en blanco.
Las señales colectivas contienen otras señales. Éstas se pueden visualizar con elpulsador Detalles. La pantalla permanece en blanco.
Tabla 22:Fallos y avisos a través de indicaciones de estado en la pantalla
RemedioDescripción/CausaIndicación en pantalla
Para la descripción de los textos de estado, véasela tabla <Textos de estado en el menú S0001>.
La indicación muestra un texto de estado en lugarde la posición de la válvula.
S0001
Si el valor de la indicación es > 0: Presione el pulsa-dor Detalles.Para los detalles, véase la tabla <Avisos y fuera deespecificación>.
Señal colectiva 02:Indica el número de avisos presentes.
S0005Avisos
Si el valor de la indicación es > 0: Presione el pulsa-dor Detalles.Para los detalles, véase la tabla <No listo REMOTOy comprobación de funciones>.
Señal colectiva 04:Indica el número de señales presentes.
S0006No listo REMOTO
Si el valor de la indicación es > 0: Presione el pulsa-dor Detalles para ver una lista de señales deta-lladas.Para los detalles, véase la tabla <Fallos y averías>.
Señal colectiva 03:Indica el número de fallos presentes.El actuador no se puede maniobrar.
S0007Fallo
Si el valor de la indicación es > 0: Presione el pulsa-dor Detalles.Para los detalles, véase la tabla <Avisos y fuera deespecificación>.
Señal colectiva 07:Señal según la recomendación NAMUR NE 107El actuador se opera fuera de las condiciones deservicio normales.
S0008Fuera de especif.
Si el valor de la indicación es > 0: Presione el pulsa-dor Detalles.Para los detalles, véase la tabla <No listo REMOTOy comprobación de funciones>.
Señal colectiva 08:Señal según la recomendación NAMUR NE 107Se está trabajando en el actuador, las señales desalida carecen temporalmente de validez.
S0009Comprob. funciones
Si el valor de la indicación es > 0: Presione el pulsa-dor Detalles para ver una lista de señales deta-lladas.
Señal colectiva 09:Señal según la recomendación NAMUR NE 107Recomendación de mantenimiento
S0010Mantenim. requerido
Si el valor de la indicación es > 0: Presione el pulsa-dor Detalles para ver una lista de señales deta-lladas.Para los detalles, véase la tabla <Fallos y averías>.
Señal colectiva 10:Señal según la recomendación NAMUR NE 107Fallo de funcionamiento en el actuador, las señalesde salida no tienen validez
S0011Avería
134
Control de actuadorSolución de fallos AC 01.2/ACExC 01.2
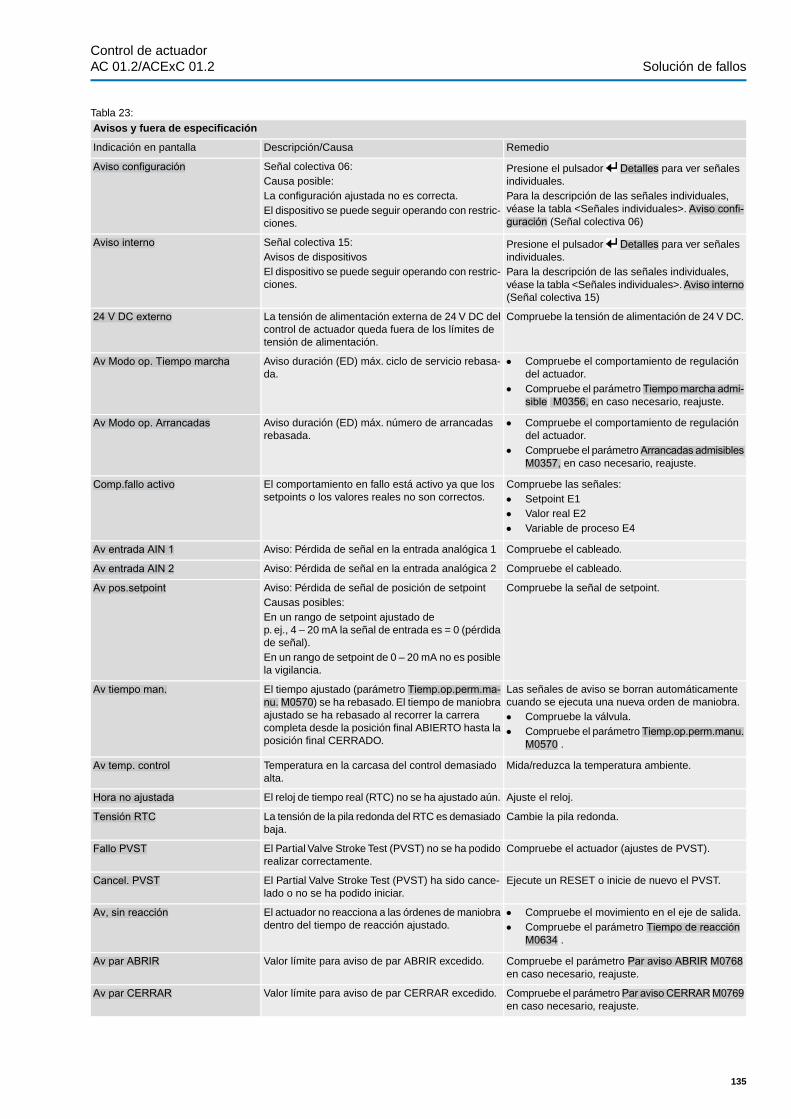
Tabla 23:Avisos y fuera de especificación
RemedioDescripción/CausaIndicación en pantalla
Presione el pulsador Detalles para ver señalesindividuales.Para la descripción de las señales individuales,véase la tabla <Señales individuales>. Aviso confi-guración (Señal colectiva 06)
Señal colectiva 06:Causa posible:La configuración ajustada no es correcta.El dispositivo se puede seguir operando con restric-ciones.
Aviso configuración
Presione el pulsador Detalles para ver señalesindividuales.Para la descripción de las señales individuales,véase la tabla <Señales individuales>.Aviso interno(Señal colectiva 15)
Señal colectiva 15:Avisos de dispositivosEl dispositivo se puede seguir operando con restric-ciones.
Aviso interno
Compruebe la tensión de alimentación de 24 V DC.La tensión de alimentación externa de 24 V DC delcontrol de actuador queda fuera de los límites detensión de alimentación.
24 V DC externo
● Compruebe el comportamiento de regulacióndel actuador.
● Compruebe el parámetro Tiempomarcha admi-sible M0356, en caso necesario, reajuste.
Aviso duración (ED) máx. ciclo de servicio rebasa-da.
Av Modo op. Tiempo marcha
● Compruebe el comportamiento de regulacióndel actuador.
● Compruebe el parámetro Arrancadas admisiblesM0357, en caso necesario, reajuste.
Aviso duración (ED) máx. número de arrancadasrebasada.
Av Modo op. Arrancadas
Compruebe las señales:● Setpoint E1● Valor real E2● Variable de proceso E4
El comportamiento en fallo está activo ya que lossetpoints o los valores reales no son correctos.
Comp.fallo activo
Compruebe el cableado.Aviso: Pérdida de señal en la entrada analógica 1Av entrada AIN 1
Compruebe el cableado.Aviso: Pérdida de señal en la entrada analógica 2Av entrada AIN 2
Compruebe la señal de setpoint.Aviso: Pérdida de señal de posición de setpointCausas posibles:En un rango de setpoint ajustado dep. ej., 4 – 20 mA la señal de entrada es = 0 (pérdidade señal).En un rango de setpoint de 0 – 20 mA no es posiblela vigilancia.
Av pos.setpoint
Las señales de aviso se borran automáticamentecuando se ejecuta una nueva orden de maniobra.● Compruebe la válvula.● Compruebe el parámetro Tiemp.op.perm.manu.
M0570 .
El tiempo ajustado (parámetro Tiemp.op.perm.ma-nu. M0570) se ha rebasado. El tiempo de maniobraajustado se ha rebasado al recorrer la carreracompleta desde la posición final ABIERTO hasta laposición final CERRADO.
Av tiempo man.
Mida/reduzca la temperatura ambiente.Temperatura en la carcasa del control demasiadoalta.
Av temp. control
Ajuste el reloj.El reloj de tiempo real (RTC) no se ha ajustado aún.Hora no ajustada
Cambie la pila redonda.La tensión de la pila redonda del RTC es demasiadobaja.
Tensión RTC
Compruebe el actuador (ajustes de PVST).El Partial Valve Stroke Test (PVST) no se ha podidorealizar correctamente.
Fallo PVST
Ejecute un RESET o inicie de nuevo el PVST.El Partial Valve Stroke Test (PVST) ha sido cance-lado o no se ha podido iniciar.
Cancel. PVST
● Compruebe el movimiento en el eje de salida.● Compruebe el parámetro Tiempo de reacción
M0634 .
El actuador no reacciona a las órdenes de maniobradentro del tiempo de reacción ajustado.
Av, sin reacción
Compruebe el parámetro Par aviso ABRIR M0768en caso necesario, reajuste.
Valor límite para aviso de par ABRIR excedido.Av par ABRIR
Compruebe el parámetro Par aviso CERRARM0769en caso necesario, reajuste.
Valor límite para aviso de par CERRAR excedido.Av par CERRAR
135
Control de actuadorAC 01.2/ACExC 01.2 Solución de fallos
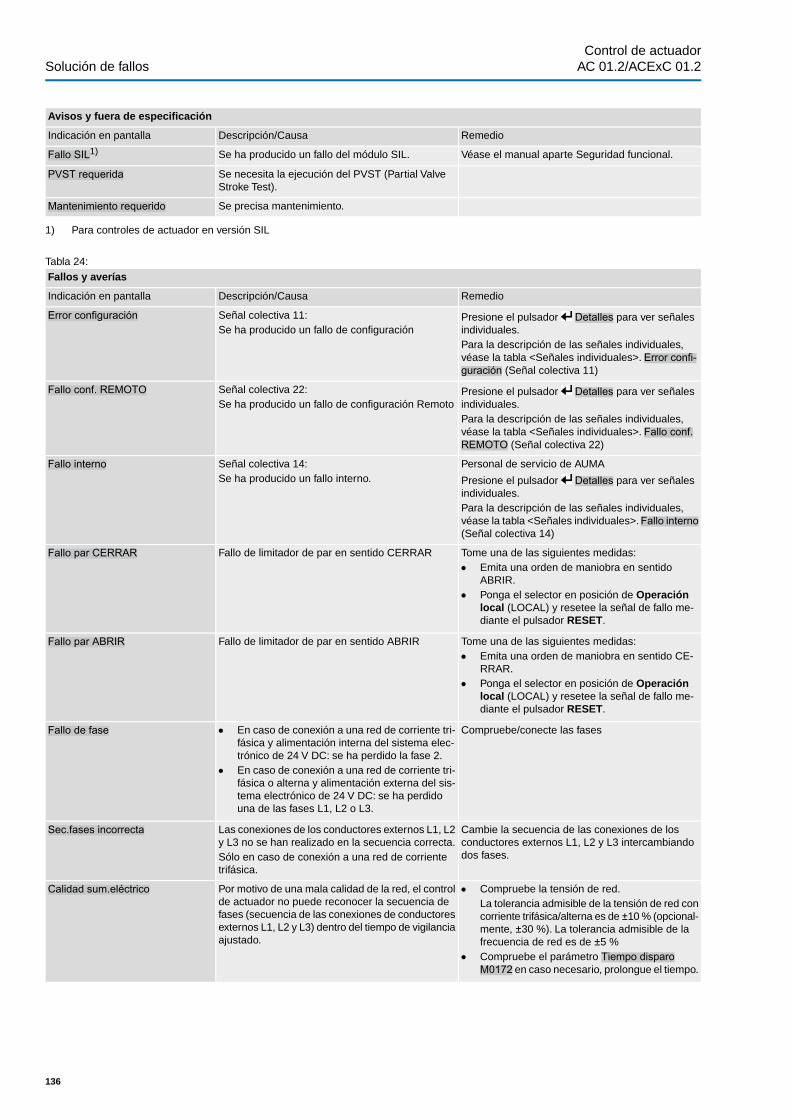
Avisos y fuera de especificación
RemedioDescripción/CausaIndicación en pantalla
Véase el manual aparte Seguridad funcional.Se ha producido un fallo del módulo SIL.Fallo SIL1)
Se necesita la ejecución del PVST (Partial ValveStroke Test).
PVST requerida
Se precisa mantenimiento.Mantenimiento requerido
Para controles de actuador en versión SIL1)
Tabla 24:Fallos y averías
RemedioDescripción/CausaIndicación en pantalla
Presione el pulsador Detalles para ver señalesindividuales.Para la descripción de las señales individuales,véase la tabla <Señales individuales>. Error confi-guración (Señal colectiva 11)
Señal colectiva 11:Se ha producido un fallo de configuración
Error configuración
Presione el pulsador Detalles para ver señalesindividuales.Para la descripción de las señales individuales,véase la tabla <Señales individuales>. Fallo conf.REMOTO (Señal colectiva 22)
Señal colectiva 22:Se ha producido un fallo de configuración Remoto
Fallo conf. REMOTO
Personal de servicio de AUMA
Presione el pulsador Detalles para ver señalesindividuales.Para la descripción de las señales individuales,véase la tabla <Señales individuales>.Fallo interno(Señal colectiva 14)
Señal colectiva 14:Se ha producido un fallo interno.
Fallo interno
Tome una de las siguientes medidas:● Emita una orden de maniobra en sentido
ABRIR.● Ponga el selector en posición de Operación
local (LOCAL) y resetee la señal de fallo me-diante el pulsador RESET.
Fallo de limitador de par en sentido CERRARFallo par CERRAR
Tome una de las siguientes medidas:● Emita una orden de maniobra en sentido CE-
RRAR.● Ponga el selector en posición de Operación
local (LOCAL) y resetee la señal de fallo me-diante el pulsador RESET.
Fallo de limitador de par en sentido ABRIRFallo par ABRIR
Compruebe/conecte las fases● En caso de conexión a una red de corriente tri-fásica y alimentación interna del sistema elec-trónico de 24 V DC: se ha perdido la fase 2.
● En caso de conexión a una red de corriente tri-fásica o alterna y alimentación externa del sis-tema electrónico de 24 V DC: se ha perdidouna de las fases L1, L2 o L3.
Fallo de fase
Cambie la secuencia de las conexiones de losconductores externos L1, L2 y L3 intercambiandodos fases.
Las conexiones de los conductores externos L1, L2y L3 no se han realizado en la secuencia correcta.Sólo en caso de conexión a una red de corrientetrifásica.
Sec.fases incorrecta
● Compruebe la tensión de red.La tolerancia admisible de la tensión de red concorriente trifásica/alterna es de ±10 % (opcional-mente, ±30 %). La tolerancia admisible de lafrecuencia de red es de ±5 %
● Compruebe el parámetro Tiempo disparoM0172 en caso necesario, prolongue el tiempo.
Por motivo de una mala calidad de la red, el controlde actuador no puede reconocer la secuencia defases (secuencia de las conexiones de conductoresexternos L1, L2 y L3) dentro del tiempo de vigilanciaajustado.
Calidad sum.eléctrico
136
Control de actuadorSolución de fallos AC 01.2/ACExC 01.2
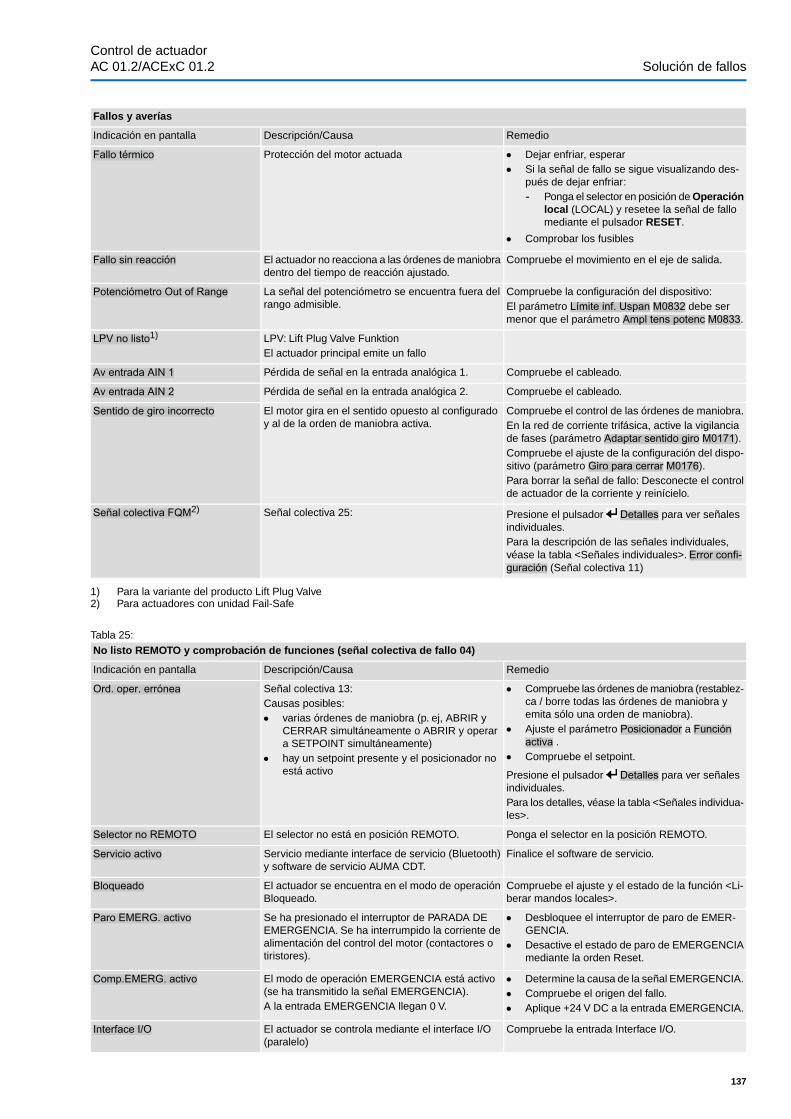
Fallos y averías
RemedioDescripción/CausaIndicación en pantalla
● Dejar enfriar, esperar● Si la señal de fallo se sigue visualizando des-
pués de dejar enfriar:- Ponga el selector en posición de Operación
local (LOCAL) y resetee la señal de fallomediante el pulsador RESET.
● Comprobar los fusibles
Protección del motor actuadaFallo térmico
Compruebe el movimiento en el eje de salida.El actuador no reacciona a las órdenes de maniobradentro del tiempo de reacción ajustado.
Fallo sin reacción
Compruebe la configuración del dispositivo:El parámetro Límite inf. Uspan M0832 debe sermenor que el parámetro Ampl tens potenc M0833.
La señal del potenciómetro se encuentra fuera delrango admisible.
Potenciómetro Out of Range
LPV: Lift Plug Valve FunktionEl actuador principal emite un fallo
LPV no listo1)
Compruebe el cableado.Pérdida de señal en la entrada analógica 1.Av entrada AIN 1
Compruebe el cableado.Pérdida de señal en la entrada analógica 2.Av entrada AIN 2
Compruebe el control de las órdenes de maniobra.En la red de corriente trifásica, active la vigilanciade fases (parámetro Adaptar sentido giro M0171).Compruebe el ajuste de la configuración del dispo-sitivo (parámetro Giro para cerrar M0176).Para borrar la señal de fallo: Desconecte el controlde actuador de la corriente y reinícielo.
El motor gira en el sentido opuesto al configuradoy al de la orden de maniobra activa.
Sentido de giro incorrecto
Presione el pulsador Detalles para ver señalesindividuales.Para la descripción de las señales individuales,véase la tabla <Señales individuales>. Error confi-guración (Señal colectiva 11)
Señal colectiva 25:Señal colectiva FQM2)
Para la variante del producto Lift Plug Valve1)Para actuadores con unidad Fail-Safe2)
Tabla 25:No listo REMOTO y comprobación de funciones (señal colectiva de fallo 04)
RemedioDescripción/CausaIndicación en pantalla
● Compruebe las órdenes de maniobra (restablez-ca / borre todas las órdenes de maniobra yemita sólo una orden de maniobra).
● Ajuste el parámetro Posicionador a Funciónactiva .
● Compruebe el setpoint.
Presione el pulsador Detalles para ver señalesindividuales.Para los detalles, véase la tabla <Señales individua-les>.
Señal colectiva 13:Causas posibles:● varias órdenes de maniobra (p. ej, ABRIR y
CERRAR simultáneamente o ABRIR y operara SETPOINT simultáneamente)
● hay un setpoint presente y el posicionador noestá activo
Ord. oper. errónea
Ponga el selector en la posición REMOTO.El selector no está en posición REMOTO.Selector no REMOTO
Finalice el software de servicio.Servicio mediante interface de servicio (Bluetooth)y software de servicio AUMA CDT.
Servicio activo
Compruebe el ajuste y el estado de la función <Li-berar mandos locales>.
El actuador se encuentra en el modo de operaciónBloqueado.
Bloqueado
● Desbloquee el interruptor de paro de EMER-GENCIA.
● Desactive el estado de paro de EMERGENCIAmediante la orden Reset.
Se ha presionado el interruptor de PARADA DEEMERGENCIA. Se ha interrumpido la corriente dealimentación del control del motor (contactores otiristores).
Paro EMERG. activo
● Determine la causa de la señal EMERGENCIA.● Compruebe el origen del fallo.● Aplique +24 V DC a la entrada EMERGENCIA.
El modo de operación EMERGENCIA está activo(se ha transmitido la señal EMERGENCIA).A la entrada EMERGENCIA llegan 0 V.
Comp.EMERG. activo
Compruebe la entrada Interface I/O.El actuador se controla mediante el interface I/O(paralelo)
Interface I/O
137
Control de actuadorAC 01.2/ACExC 01.2 Solución de fallos
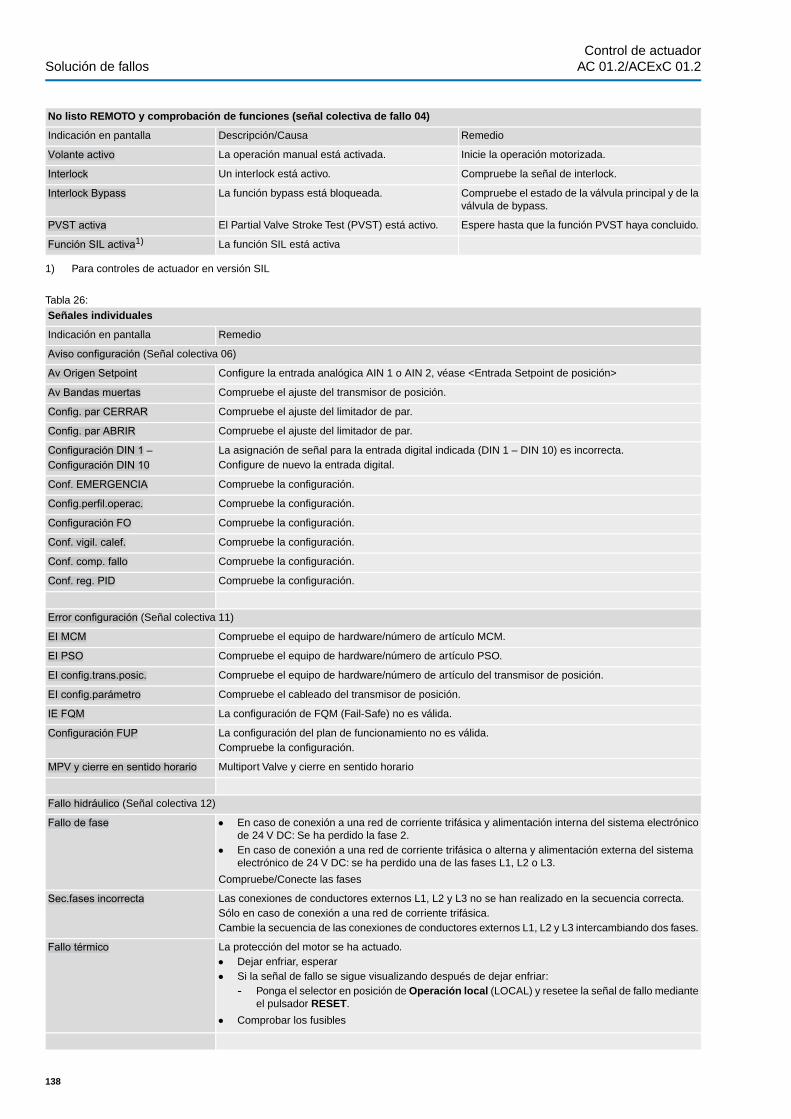
No listo REMOTO y comprobación de funciones (señal colectiva de fallo 04)
RemedioDescripción/CausaIndicación en pantalla
Inicie la operación motorizada.La operación manual está activada.Volante activo
Compruebe la señal de interlock.Un interlock está activo.Interlock
Compruebe el estado de la válvula principal y de laválvula de bypass.
La función bypass está bloqueada.Interlock Bypass
Espere hasta que la función PVST haya concluido.El Partial Valve Stroke Test (PVST) está activo.PVST activa
La función SIL está activaFunción SIL activa1)
Para controles de actuador en versión SIL1)
Tabla 26:Señales individuales
RemedioIndicación en pantalla
Aviso configuración (Señal colectiva 06)
Configure la entrada analógica AIN 1 o AIN 2, véase <Entrada Setpoint de posición>Av Origen Setpoint
Compruebe el ajuste del transmisor de posición.Av Bandas muertas
Compruebe el ajuste del limitador de par.Config. par CERRAR
Compruebe el ajuste del limitador de par.Config. par ABRIR
La asignación de señal para la entrada digital indicada (DIN 1 – DIN 10) es incorrecta.Configure de nuevo la entrada digital.
Configuración DIN 1 –Configuración DIN 10
Compruebe la configuración.Conf. EMERGENCIA
Compruebe la configuración.Config.perfil.operac.
Compruebe la configuración.Configuración FO
Compruebe la configuración.Conf. vigil. calef.
Compruebe la configuración.Conf. comp. fallo
Compruebe la configuración.Conf. reg. PID
Error configuración (Señal colectiva 11)
Compruebe el equipo de hardware/número de artículo MCM.EI MCM
Compruebe el equipo de hardware/número de artículo PSO.EI PSO
Compruebe el equipo de hardware/número de artículo del transmisor de posición.EI config.trans.posic.
Compruebe el cableado del transmisor de posición.EI config.parámetro
La configuración de FQM (Fail-Safe) no es válida.IE FQM
La configuración del plan de funcionamiento no es válida.Compruebe la configuración.
Configuración FUP
Multiport Valve y cierre en sentido horarioMPV y cierre en sentido horario
Fallo hidráulico (Señal colectiva 12)
● En caso de conexión a una red de corriente trifásica y alimentación interna del sistema electrónicode 24 V DC: Se ha perdido la fase 2.
● En caso de conexión a una red de corriente trifásica o alterna y alimentación externa del sistemaelectrónico de 24 V DC: se ha perdido una de las fases L1, L2 o L3.
Compruebe/Conecte las fases
Fallo de fase
Las conexiones de conductores externos L1, L2 y L3 no se han realizado en la secuencia correcta.Sólo en caso de conexión a una red de corriente trifásica.Cambie la secuencia de las conexiones de conductores externos L1, L2 y L3 intercambiando dos fases.
Sec.fases incorrecta
La protección del motor se ha actuado.● Dejar enfriar, esperar● Si la señal de fallo se sigue visualizando después de dejar enfriar:
- Ponga el selector en posición de Operación local (LOCAL) y resetee la señal de fallo medianteel pulsador RESET.
● Comprobar los fusibles
Fallo térmico
138
Control de actuadorSolución de fallos AC 01.2/ACExC 01.2
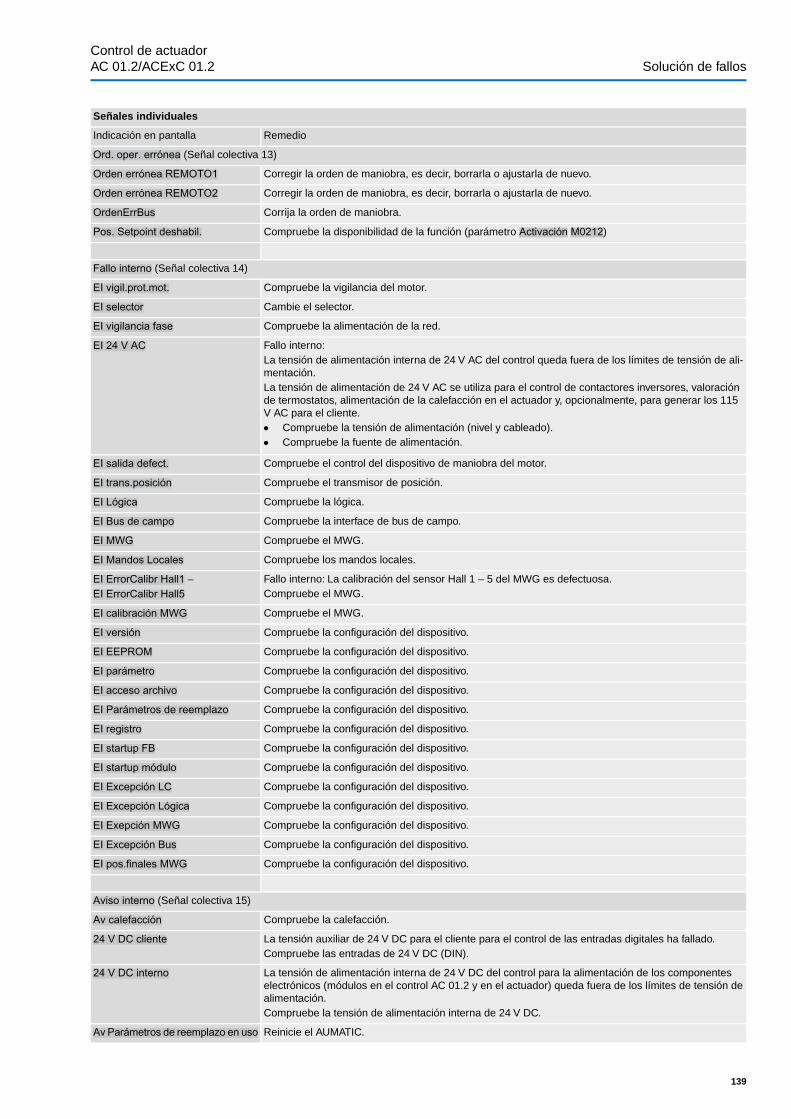
Señales individuales
RemedioIndicación en pantalla
Ord. oper. errónea (Señal colectiva 13)
Corregir la orden de maniobra, es decir, borrarla o ajustarla de nuevo.Orden errónea REMOTO1
Corregir la orden de maniobra, es decir, borrarla o ajustarla de nuevo.Orden errónea REMOTO2
Corrija la orden de maniobra.OrdenErrBus
Compruebe la disponibilidad de la función (parámetro Activación M0212)Pos. Setpoint deshabil.
Fallo interno (Señal colectiva 14)
Compruebe la vigilancia del motor.EI vigil.prot.mot.
Cambie el selector.EI selector
Compruebe la alimentación de la red.EI vigilancia fase
Fallo interno:La tensión de alimentación interna de 24 V AC del control queda fuera de los límites de tensión de ali-mentación.La tensión de alimentación de 24 V AC se utiliza para el control de contactores inversores, valoraciónde termostatos, alimentación de la calefacción en el actuador y, opcionalmente, para generar los 115V AC para el cliente.● Compruebe la tensión de alimentación (nivel y cableado).● Compruebe la fuente de alimentación.
EI 24 V AC
Compruebe el control del dispositivo de maniobra del motor.EI salida defect.
Compruebe el transmisor de posición.EI trans.posición
Compruebe la lógica.EI Lógica
Compruebe la interface de bus de campo.EI Bus de campo
Compruebe el MWG.EI MWG
Compruebe los mandos locales.EI Mandos Locales
Fallo interno: La calibración del sensor Hall 1 – 5 del MWG es defectuosa.Compruebe el MWG.
EI ErrorCalibr Hall1 –EI ErrorCalibr Hall5
Compruebe el MWG.EI calibración MWG
Compruebe la configuración del dispositivo.EI versión
Compruebe la configuración del dispositivo.EI EEPROM
Compruebe la configuración del dispositivo.EI parámetro
Compruebe la configuración del dispositivo.EI acceso archivo
Compruebe la configuración del dispositivo.EI Parámetros de reemplazo
Compruebe la configuración del dispositivo.EI registro
Compruebe la configuración del dispositivo.EI startup FB
Compruebe la configuración del dispositivo.EI startup módulo
Compruebe la configuración del dispositivo.EI Excepción LC
Compruebe la configuración del dispositivo.EI Excepción Lógica
Compruebe la configuración del dispositivo.EI Exepción MWG
Compruebe la configuración del dispositivo.EI Excepción Bus
Compruebe la configuración del dispositivo.EI pos.finales MWG
Aviso interno (Señal colectiva 15)
Compruebe la calefacción.Av calefacción
La tensión auxiliar de 24 V DC para el cliente para el control de las entradas digitales ha fallado.Compruebe las entradas de 24 V DC (DIN).
24 V DC cliente
La tensión de alimentación interna de 24 V DC del control para la alimentación de los componenteselectrónicos (módulos en el control AC 01.2 y en el actuador) queda fuera de los límites de tensión dealimentación.Compruebe la tensión de alimentación interna de 24 V DC.
24 V DC interno
Reinicie el AUMATIC.Av Parámetros de reemplazo en uso
139
Control de actuadorAC 01.2/ACExC 01.2 Solución de fallos
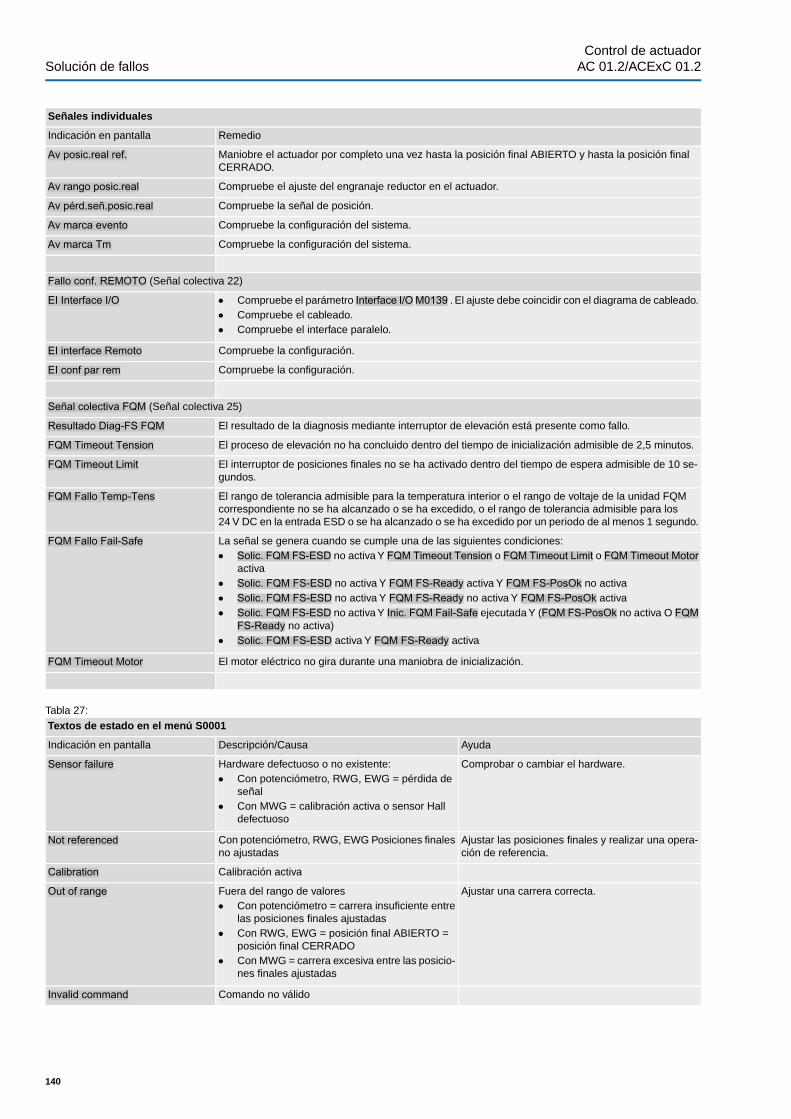
Señales individuales
RemedioIndicación en pantalla
Maniobre el actuador por completo una vez hasta la posición final ABIERTO y hasta la posición finalCERRADO.
Av posic.real ref.
Compruebe el ajuste del engranaje reductor en el actuador.Av rango posic.real
Compruebe la señal de posición.Av pérd.señ.posic.real
Compruebe la configuración del sistema.Av marca evento
Compruebe la configuración del sistema.Av marca Tm
Fallo conf. REMOTO (Señal colectiva 22)
● Compruebe el parámetro Interface I/O M0139 . El ajuste debe coincidir con el diagrama de cableado.● Compruebe el cableado.● Compruebe el interface paralelo.
EI Interface I/O
Compruebe la configuración.EI interface Remoto
Compruebe la configuración.EI conf par rem
Señal colectiva FQM (Señal colectiva 25)
El resultado de la diagnosis mediante interruptor de elevación está presente como fallo.Resultado Diag-FS FQM
El proceso de elevación no ha concluido dentro del tiempo de inicialización admisible de 2,5 minutos.FQM Timeout Tension
El interruptor de posiciones finales no se ha activado dentro del tiempo de espera admisible de 10 se-gundos.
FQM Timeout Limit
El rango de tolerancia admisible para la temperatura interior o el rango de voltaje de la unidad FQMcorrespondiente no se ha alcanzado o se ha excedido, o el rango de tolerancia admisible para los24 V DC en la entrada ESD o se ha alcanzado o se ha excedido por un periodo de al menos 1 segundo.
FQM Fallo Temp-Tens
La señal se genera cuando se cumple una de las siguientes condiciones:● Solic. FQM FS-ESD no activa Y FQM Timeout Tension o FQM Timeout Limit o FQM Timeout Motor
activa● Solic. FQM FS-ESD no activa Y FQM FS-Ready activa Y FQM FS-PosOk no activa● Solic. FQM FS-ESD no activa Y FQM FS-Ready no activa Y FQM FS-PosOk activa● Solic. FQM FS-ESD no activa Y Inic. FQM Fail-Safe ejecutada Y (FQM FS-PosOk no activa O FQM
FS-Ready no activa)● Solic. FQM FS-ESD activa Y FQM FS-Ready activa
FQM Fallo Fail-Safe
El motor eléctrico no gira durante una maniobra de inicialización.FQM Timeout Motor
Tabla 27:Textos de estado en el menú S0001
AyudaDescripción/CausaIndicación en pantalla
Comprobar o cambiar el hardware.Hardware defectuoso o no existente:● Con potenciómetro, RWG, EWG = pérdida de
señal● Con MWG = calibración activa o sensor Hall
defectuoso
Sensor failure
Ajustar las posiciones finales y realizar una opera-ción de referencia.
Con potenciómetro, RWG, EWG Posiciones finalesno ajustadas
Not referenced
Calibración activaCalibration
Ajustar una carrera correcta.Fuera del rango de valores● Con potenciómetro = carrera insuficiente entre
las posiciones finales ajustadas● Con RWG, EWG = posición final ABIERTO =
posición final CERRADO● Con MWG = carrera excesiva entre las posicio-
nes finales ajustadas
Out of range
Comando no válidoInvalid command
140
Control de actuadorSolución de fallos AC 01.2/ACExC 01.2
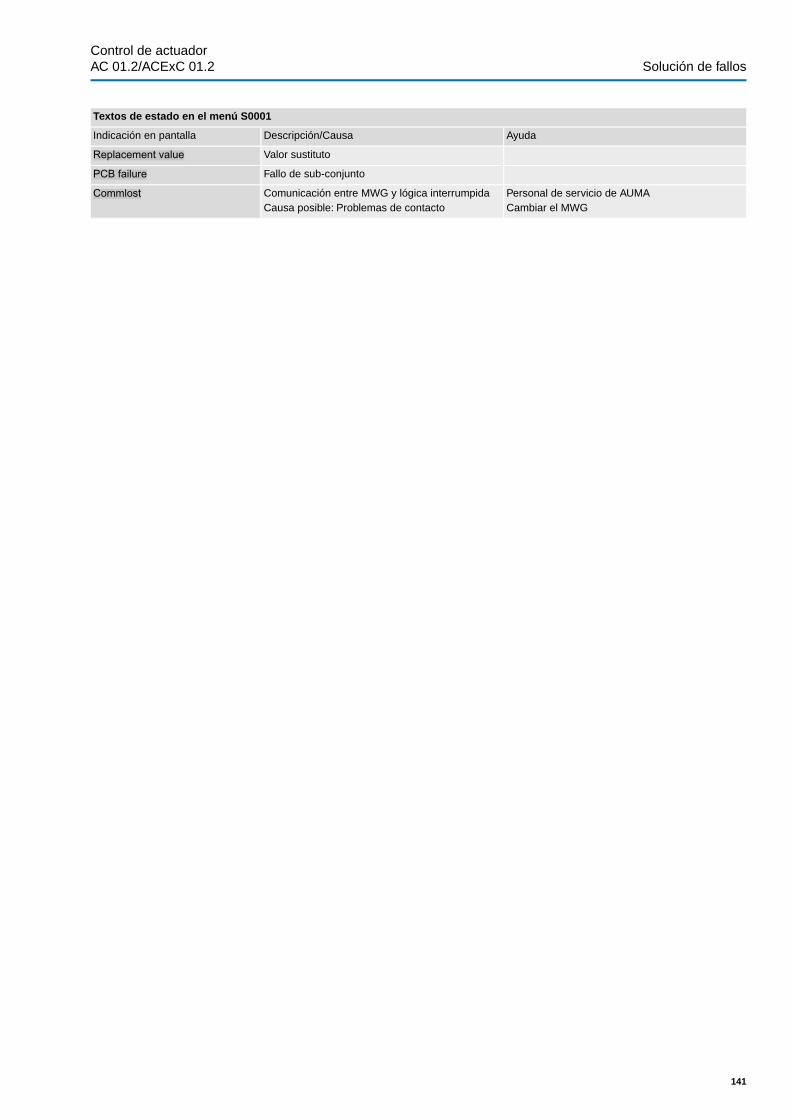
Textos de estado en el menú S0001
AyudaDescripción/CausaIndicación en pantalla
Valor sustitutoReplacement value
Fallo de sub-conjuntoPCB failure
Personal de servicio de AUMACambiar el MWG
Comunicación entre MWG y lógica interrumpidaCausa posible: Problemas de contacto
Commlost
141
Control de actuadorAC 01.2/ACExC 01.2 Solución de fallos
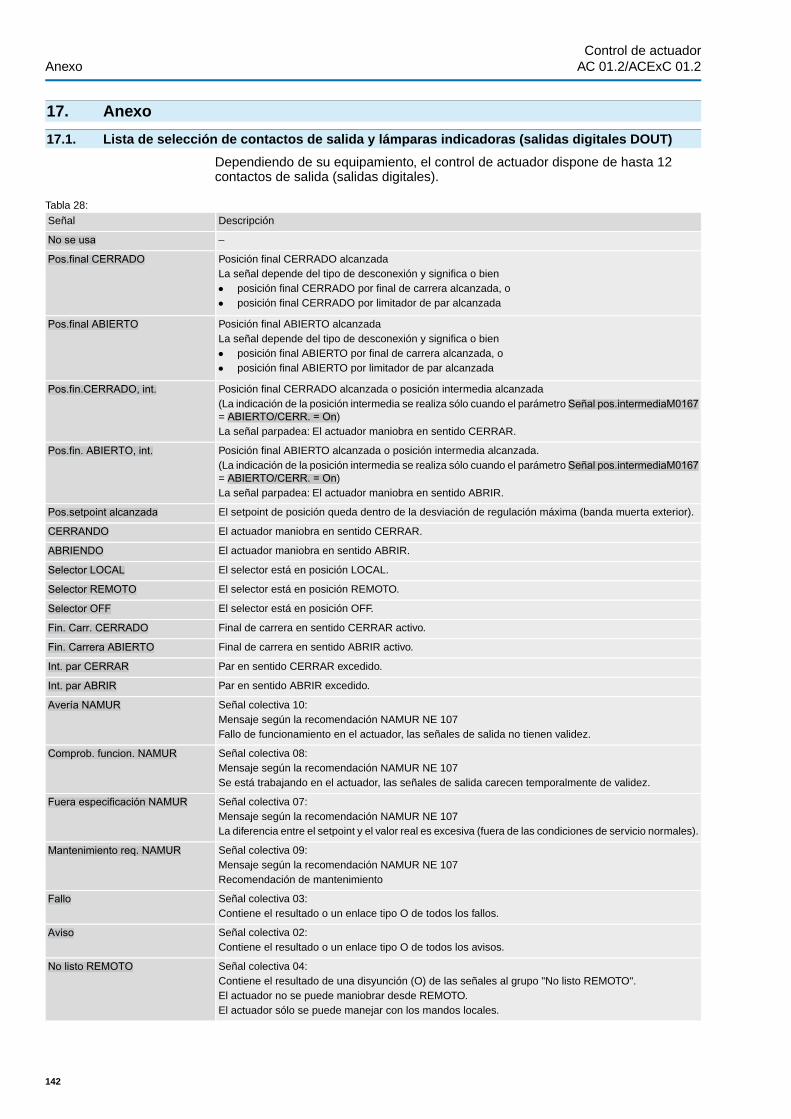
17. Anexo
17.1. Lista de selección de contactos de salida y lámparas indicadoras (salidas digitales DOUT)
Dependiendo de su equipamiento, el control de actuador dispone de hasta 12contactos de salida (salidas digitales).
Tabla 28:DescripciónSeñal
–No se usa
Posición final CERRADO alcanzadaLa señal depende del tipo de desconexión y significa o bien● posición final CERRADO por final de carrera alcanzada, o● posición final CERRADO por limitador de par alcanzada
Pos.final CERRADO
Posición final ABIERTO alcanzadaLa señal depende del tipo de desconexión y significa o bien● posición final ABIERTO por final de carrera alcanzada, o● posición final ABIERTO por limitador de par alcanzada
Pos.final ABIERTO
Posición final CERRADO alcanzada o posición intermedia alcanzada(La indicación de la posición intermedia se realiza sólo cuando el parámetro Señal pos.intermediaM0167= ABIERTO/CERR. = On)La señal parpadea: El actuador maniobra en sentido CERRAR.
Pos.fin.CERRADO, int.
Posición final ABIERTO alcanzada o posición intermedia alcanzada.(La indicación de la posición intermedia se realiza sólo cuando el parámetro Señal pos.intermediaM0167= ABIERTO/CERR. = On)La señal parpadea: El actuador maniobra en sentido ABRIR.
Pos.fin. ABIERTO, int.
El setpoint de posición queda dentro de la desviación de regulación máxima (banda muerta exterior).Pos.setpoint alcanzada
El actuador maniobra en sentido CERRAR.CERRANDO
El actuador maniobra en sentido ABRIR.ABRIENDO
El selector está en posición LOCAL.Selector LOCAL
El selector está en posición REMOTO.Selector REMOTO
El selector está en posición OFF.Selector OFF
Final de carrera en sentido CERRAR activo.Fin. Carr. CERRADO
Final de carrera en sentido ABRIR activo.Fin. Carrera ABIERTO
Par en sentido CERRAR excedido.Int. par CERRAR
Par en sentido ABRIR excedido.Int. par ABRIR
Señal colectiva 10:Mensaje según la recomendación NAMUR NE 107Fallo de funcionamiento en el actuador, las señales de salida no tienen validez.
Avería NAMUR
Señal colectiva 08:Mensaje según la recomendación NAMUR NE 107Se está trabajando en el actuador, las señales de salida carecen temporalmente de validez.
Comprob. funcion. NAMUR
Señal colectiva 07:Mensaje según la recomendación NAMUR NE 107La diferencia entre el setpoint y el valor real es excesiva (fuera de las condiciones de servicio normales).
Fuera especificación NAMUR
Señal colectiva 09:Mensaje según la recomendación NAMUR NE 107Recomendación de mantenimiento
Mantenimiento req. NAMUR
Señal colectiva 03:Contiene el resultado o un enlace tipo O de todos los fallos.
Fallo
Señal colectiva 02:Contiene el resultado o un enlace tipo O de todos los avisos.
Aviso
Señal colectiva 04:Contiene el resultado de una disyunción (O) de las señales al grupo "No listo REMOTO".El actuador no se puede maniobrar desde REMOTO.El actuador sólo se puede manejar con los mandos locales.
No listo REMOTO
142
Control de actuadorAnexo AC 01.2/ACExC 01.2
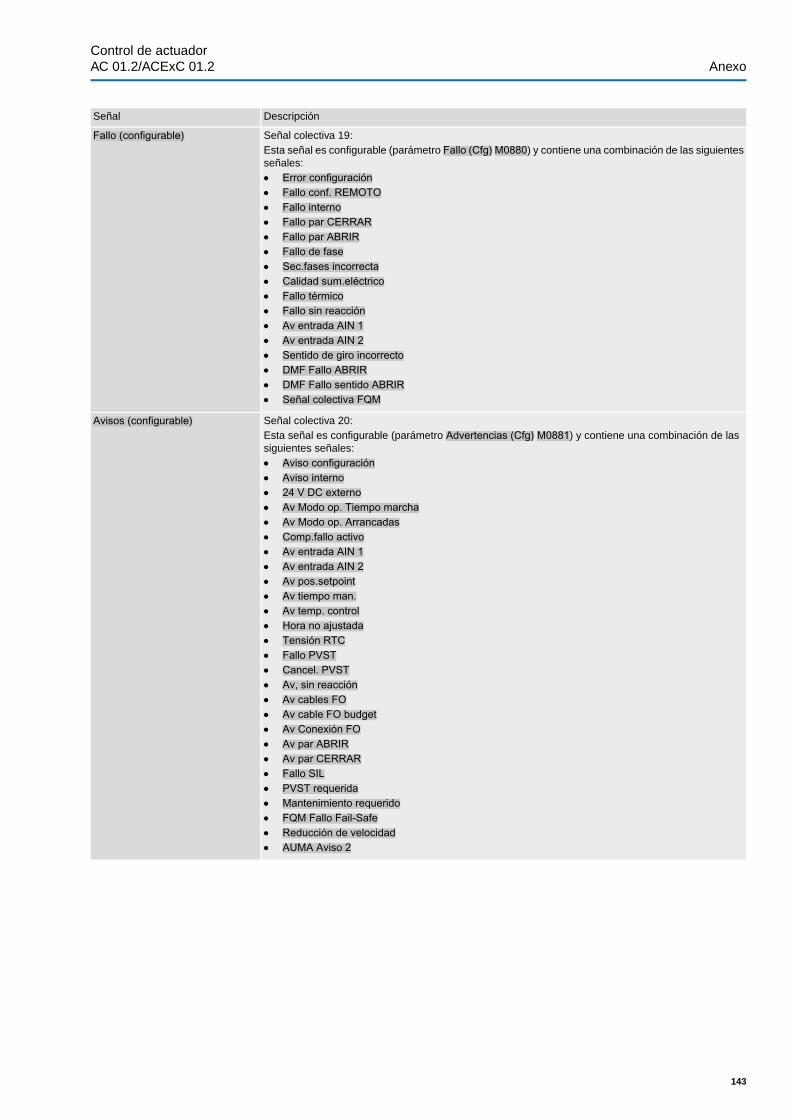
DescripciónSeñal
Señal colectiva 19:Esta señal es configurable (parámetro Fallo (Cfg) M0880) y contiene una combinación de las siguientesseñales:● Error configuración● Fallo conf. REMOTO● Fallo interno● Fallo par CERRAR● Fallo par ABRIR● Fallo de fase● Sec.fases incorrecta● Calidad sum.eléctrico● Fallo térmico● Fallo sin reacción● Av entrada AIN 1● Av entrada AIN 2● Sentido de giro incorrecto● DMF Fallo ABRIR● DMF Fallo sentido ABRIR● Señal colectiva FQM
Fallo (configurable)
Señal colectiva 20:Esta señal es configurable (parámetro Advertencias (Cfg) M0881) y contiene una combinación de lassiguientes señales:● Aviso configuración● Aviso interno● 24 V DC externo● Av Modo op. Tiempo marcha● Av Modo op. Arrancadas● Comp.fallo activo● Av entrada AIN 1● Av entrada AIN 2● Av pos.setpoint● Av tiempo man.● Av temp. control● Hora no ajustada● Tensión RTC● Fallo PVST● Cancel. PVST● Av, sin reacción● Av cables FO● Av cable FO budget● Av Conexión FO● Av par ABRIR● Av par CERRAR● Fallo SIL● PVST requerida● Mantenimiento requerido● FQM Fallo Fail-Safe● Reducción de velocidad● AUMA Aviso 2
Avisos (configurable)
143
Control de actuadorAC 01.2/ACExC 01.2 Anexo
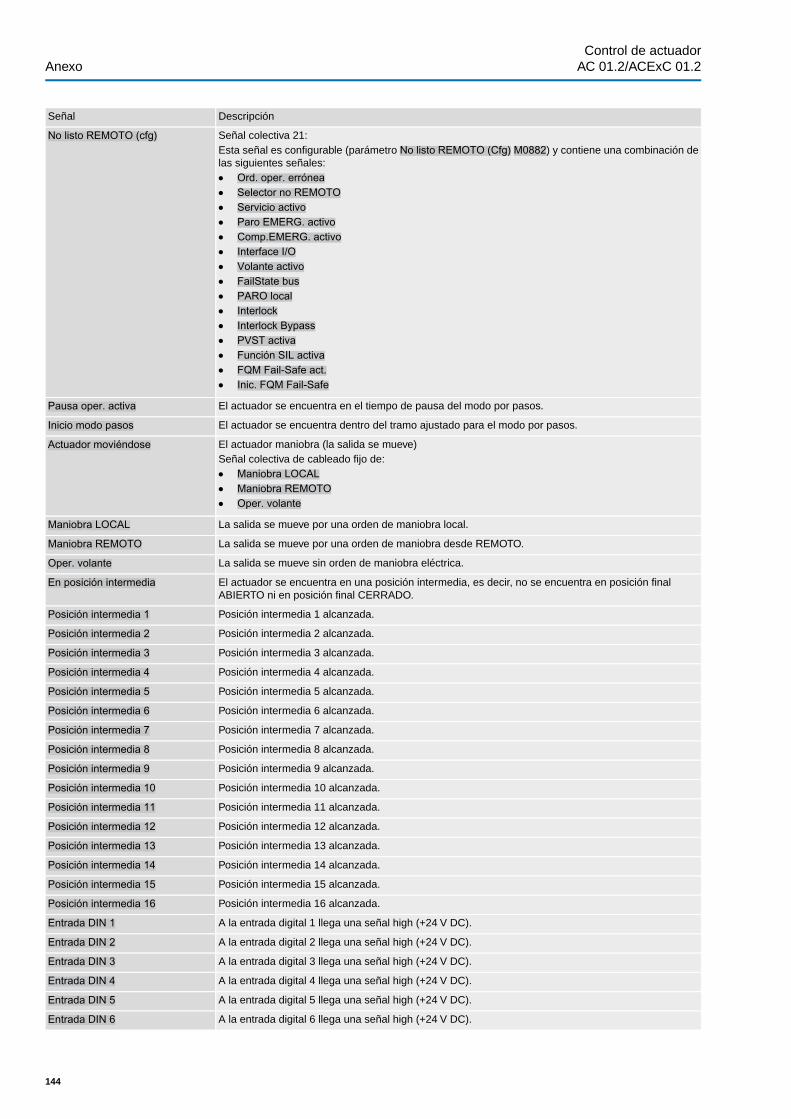
DescripciónSeñal
Señal colectiva 21:Esta señal es configurable (parámetro No listo REMOTO (Cfg) M0882) y contiene una combinación delas siguientes señales:● Ord. oper. errónea● Selector no REMOTO● Servicio activo● Paro EMERG. activo● Comp.EMERG. activo● Interface I/O● Volante activo● FailState bus● PARO local● Interlock● Interlock Bypass● PVST activa● Función SIL activa● FQM Fail-Safe act.● Inic. FQM Fail-Safe
No listo REMOTO (cfg)
El actuador se encuentra en el tiempo de pausa del modo por pasos.Pausa oper. activa
El actuador se encuentra dentro del tramo ajustado para el modo por pasos.Inicio modo pasos
El actuador maniobra (la salida se mueve)Señal colectiva de cableado fijo de:● Maniobra LOCAL● Maniobra REMOTO● Oper. volante
Actuador moviéndose
La salida se mueve por una orden de maniobra local.Maniobra LOCAL
La salida se mueve por una orden de maniobra desde REMOTO.Maniobra REMOTO
La salida se mueve sin orden de maniobra eléctrica.Oper. volante
El actuador se encuentra en una posición intermedia, es decir, no se encuentra en posición finalABIERTO ni en posición final CERRADO.
En posición intermedia
Posición intermedia 1 alcanzada.Posición intermedia 1
Posición intermedia 2 alcanzada.Posición intermedia 2
Posición intermedia 3 alcanzada.Posición intermedia 3
Posición intermedia 4 alcanzada.Posición intermedia 4
Posición intermedia 5 alcanzada.Posición intermedia 5
Posición intermedia 6 alcanzada.Posición intermedia 6
Posición intermedia 7 alcanzada.Posición intermedia 7
Posición intermedia 8 alcanzada.Posición intermedia 8
Posición intermedia 9 alcanzada.Posición intermedia 9
Posición intermedia 10 alcanzada.Posición intermedia 10
Posición intermedia 11 alcanzada.Posición intermedia 11
Posición intermedia 12 alcanzada.Posición intermedia 12
Posición intermedia 13 alcanzada.Posición intermedia 13
Posición intermedia 14 alcanzada.Posición intermedia 14
Posición intermedia 15 alcanzada.Posición intermedia 15
Posición intermedia 16 alcanzada.Posición intermedia 16
A la entrada digital 1 llega una señal high (+24 V DC).Entrada DIN 1
A la entrada digital 2 llega una señal high (+24 V DC).Entrada DIN 2
A la entrada digital 3 llega una señal high (+24 V DC).Entrada DIN 3
A la entrada digital 4 llega una señal high (+24 V DC).Entrada DIN 4
A la entrada digital 5 llega una señal high (+24 V DC).Entrada DIN 5
A la entrada digital 6 llega una señal high (+24 V DC).Entrada DIN 6
144
Control de actuadorAnexo AC 01.2/ACExC 01.2
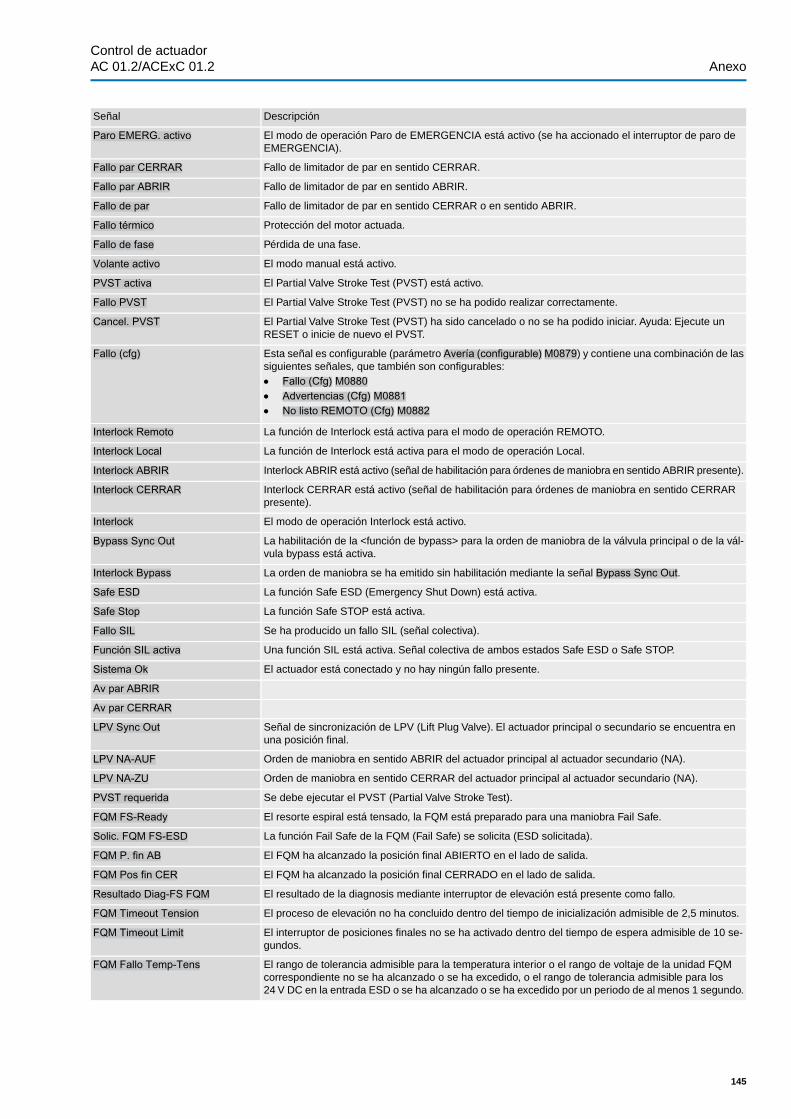
DescripciónSeñal
El modo de operación Paro de EMERGENCIA está activo (se ha accionado el interruptor de paro deEMERGENCIA).
Paro EMERG. activo
Fallo de limitador de par en sentido CERRAR.Fallo par CERRAR
Fallo de limitador de par en sentido ABRIR.Fallo par ABRIR
Fallo de limitador de par en sentido CERRAR o en sentido ABRIR.Fallo de par
Protección del motor actuada.Fallo térmico
Pérdida de una fase.Fallo de fase
El modo manual está activo.Volante activo
El Partial Valve Stroke Test (PVST) está activo.PVST activa
El Partial Valve Stroke Test (PVST) no se ha podido realizar correctamente.Fallo PVST
El Partial Valve Stroke Test (PVST) ha sido cancelado o no se ha podido iniciar. Ayuda: Ejecute unRESET o inicie de nuevo el PVST.
Cancel. PVST
Esta señal es configurable (parámetro Avería (configurable) M0879) y contiene una combinación de lassiguientes señales, que también son configurables:● Fallo (Cfg) M0880● Advertencias (Cfg) M0881● No listo REMOTO (Cfg) M0882
Fallo (cfg)
La función de Interlock está activa para el modo de operación REMOTO.Interlock Remoto
La función de Interlock está activa para el modo de operación Local.Interlock Local
Interlock ABRIR está activo (señal de habilitación para órdenes de maniobra en sentido ABRIR presente).Interlock ABRIR
Interlock CERRAR está activo (señal de habilitación para órdenes de maniobra en sentido CERRARpresente).
Interlock CERRAR
El modo de operación Interlock está activo.Interlock
La habilitación de la <función de bypass> para la orden de maniobra de la válvula principal o de la vál-vula bypass está activa.
Bypass Sync Out
La orden de maniobra se ha emitido sin habilitación mediante la señal Bypass Sync Out.Interlock Bypass
La función Safe ESD (Emergency Shut Down) está activa.Safe ESD
La función Safe STOP está activa.Safe Stop
Se ha producido un fallo SIL (señal colectiva).Fallo SIL
Una función SIL está activa. Señal colectiva de ambos estados Safe ESD o Safe STOP.Función SIL activa
El actuador está conectado y no hay ningún fallo presente.Sistema Ok
Av par ABRIR
Av par CERRAR
Señal de sincronización de LPV (Lift Plug Valve). El actuador principal o secundario se encuentra enuna posición final.
LPV Sync Out
Orden de maniobra en sentido ABRIR del actuador principal al actuador secundario (NA).LPV NA-AUF
Orden de maniobra en sentido CERRAR del actuador principal al actuador secundario (NA).LPV NA-ZU
Se debe ejecutar el PVST (Partial Valve Stroke Test).PVST requerida
El resorte espiral está tensado, la FQM está preparado para una maniobra Fail Safe.FQM FS-Ready
La función Fail Safe de la FQM (Fail Safe) se solicita (ESD solicitada).Solic. FQM FS-ESD
El FQM ha alcanzado la posición final ABIERTO en el lado de salida.FQM P. fin AB
El FQM ha alcanzado la posición final CERRADO en el lado de salida.FQM Pos fin CER
El resultado de la diagnosis mediante interruptor de elevación está presente como fallo.Resultado Diag-FS FQM
El proceso de elevación no ha concluido dentro del tiempo de inicialización admisible de 2,5 minutos.FQM Timeout Tension
El interruptor de posiciones finales no se ha activado dentro del tiempo de espera admisible de 10 se-gundos.
FQM Timeout Limit
El rango de tolerancia admisible para la temperatura interior o el rango de voltaje de la unidad FQMcorrespondiente no se ha alcanzado o se ha excedido, o el rango de tolerancia admisible para los24 V DC en la entrada ESD o se ha alcanzado o se ha excedido por un periodo de al menos 1 segundo.
FQM Fallo Temp-Tens
145
Control de actuadorAC 01.2/ACExC 01.2 Anexo
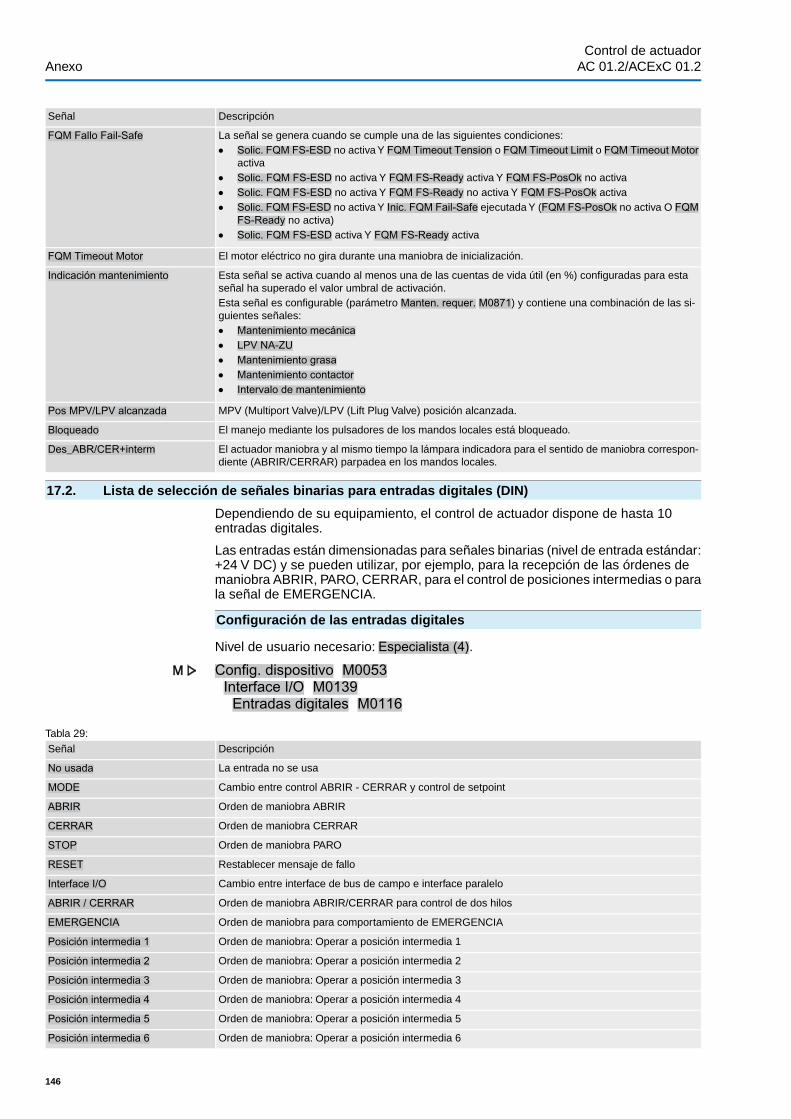
DescripciónSeñal
La señal se genera cuando se cumple una de las siguientes condiciones:● Solic. FQM FS-ESD no activa Y FQM Timeout Tension o FQM Timeout Limit o FQM Timeout Motor
activa● Solic. FQM FS-ESD no activa Y FQM FS-Ready activa Y FQM FS-PosOk no activa● Solic. FQM FS-ESD no activa Y FQM FS-Ready no activa Y FQM FS-PosOk activa● Solic. FQM FS-ESD no activa Y Inic. FQM Fail-Safe ejecutada Y (FQM FS-PosOk no activa O FQM
FS-Ready no activa)● Solic. FQM FS-ESD activa Y FQM FS-Ready activa
FQM Fallo Fail-Safe
El motor eléctrico no gira durante una maniobra de inicialización.FQM Timeout Motor
Esta señal se activa cuando al menos una de las cuentas de vida útil (en %) configuradas para estaseñal ha superado el valor umbral de activación.Esta señal es configurable (parámetro Manten. requer. M0871) y contiene una combinación de las si-guientes señales:● Mantenimiento mecánica● LPV NA-ZU● Mantenimiento grasa● Mantenimiento contactor● Intervalo de mantenimiento
Indicación mantenimiento
MPV (Multiport Valve)/LPV (Lift Plug Valve) posición alcanzada.Pos MPV/LPV alcanzada
El manejo mediante los pulsadores de los mandos locales está bloqueado.Bloqueado
El actuador maniobra y al mismo tiempo la lámpara indicadora para el sentido de maniobra correspon-diente (ABRIR/CERRAR) parpadea en los mandos locales.
Des_ABR/CER+interm
17.2. Lista de selección de señales binarias para entradas digitales (DIN)
Dependiendo de su equipamiento, el control de actuador dispone de hasta 10entradas digitales.
Las entradas están dimensionadas para señales binarias (nivel de entrada estándar:+24 V DC) y se pueden utilizar, por ejemplo, para la recepción de las órdenes demaniobra ABRIR, PARO, CERRAR, para el control de posiciones intermedias o parala señal de EMERGENCIA.
Configuración de las entradas digitales
Nivel de usuario necesario: Especialista (4).
Config. dispositivo M0053Interface I/O M0139Entradas digitales M0116
Tabla 29:DescripciónSeñal
La entrada no se usaNo usada
Cambio entre control ABRIR - CERRAR y control de setpointMODE
Orden de maniobra ABRIRABRIR
Orden de maniobra CERRARCERRAR
Orden de maniobra PAROSTOP
Restablecer mensaje de falloRESET
Cambio entre interface de bus de campo e interface paraleloInterface I/O
Orden de maniobra ABRIR/CERRAR para control de dos hilosABRIR / CERRAR
Orden de maniobra para comportamiento de EMERGENCIAEMERGENCIA
Orden de maniobra: Operar a posición intermedia 1Posición intermedia 1
Orden de maniobra: Operar a posición intermedia 2Posición intermedia 2
Orden de maniobra: Operar a posición intermedia 3Posición intermedia 3
Orden de maniobra: Operar a posición intermedia 4Posición intermedia 4
Orden de maniobra: Operar a posición intermedia 5Posición intermedia 5
Orden de maniobra: Operar a posición intermedia 6Posición intermedia 6
146
Control de actuadorAnexo AC 01.2/ACExC 01.2
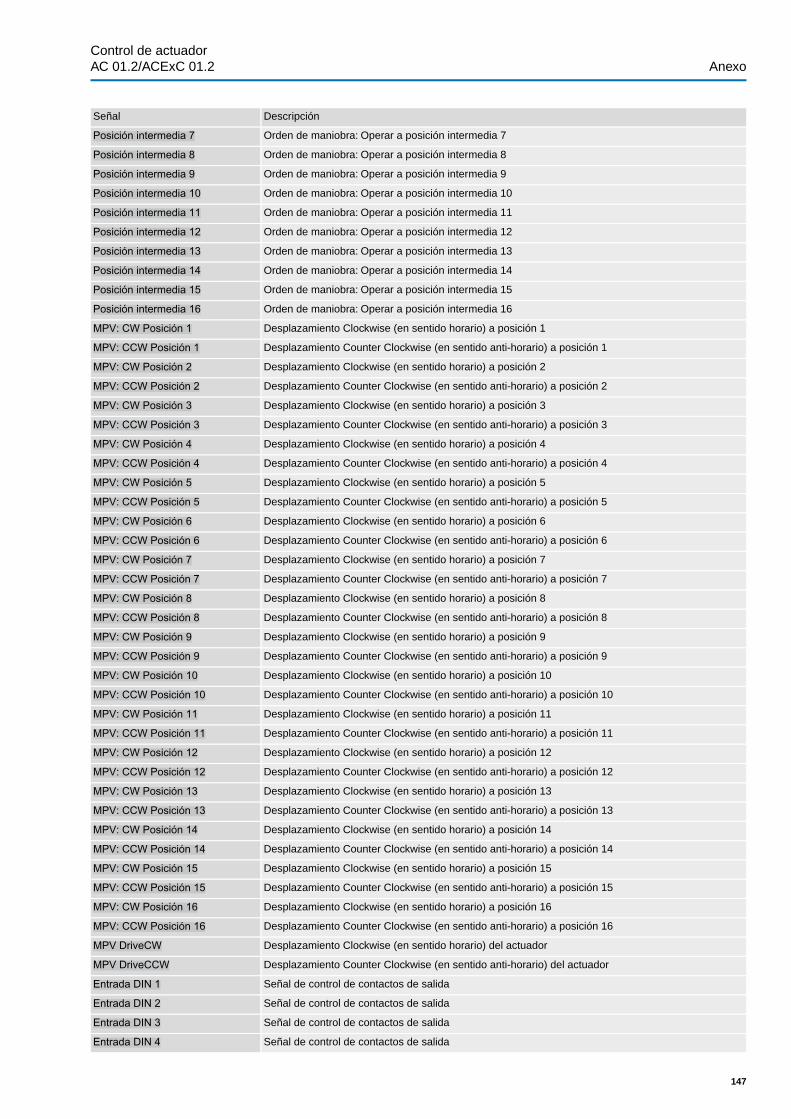
DescripciónSeñal
Orden de maniobra: Operar a posición intermedia 7Posición intermedia 7
Orden de maniobra: Operar a posición intermedia 8Posición intermedia 8
Orden de maniobra: Operar a posición intermedia 9Posición intermedia 9
Orden de maniobra: Operar a posición intermedia 10Posición intermedia 10
Orden de maniobra: Operar a posición intermedia 11Posición intermedia 11
Orden de maniobra: Operar a posición intermedia 12Posición intermedia 12
Orden de maniobra: Operar a posición intermedia 13Posición intermedia 13
Orden de maniobra: Operar a posición intermedia 14Posición intermedia 14
Orden de maniobra: Operar a posición intermedia 15Posición intermedia 15
Orden de maniobra: Operar a posición intermedia 16Posición intermedia 16
Desplazamiento Clockwise (en sentido horario) a posición 1MPV: CW Posición 1
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 1MPV: CCW Posición 1
Desplazamiento Clockwise (en sentido horario) a posición 2MPV: CW Posición 2
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 2MPV: CCW Posición 2
Desplazamiento Clockwise (en sentido horario) a posición 3MPV: CW Posición 3
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 3MPV: CCW Posición 3
Desplazamiento Clockwise (en sentido horario) a posición 4MPV: CW Posición 4
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 4MPV: CCW Posición 4
Desplazamiento Clockwise (en sentido horario) a posición 5MPV: CW Posición 5
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 5MPV: CCW Posición 5
Desplazamiento Clockwise (en sentido horario) a posición 6MPV: CW Posición 6
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 6MPV: CCW Posición 6
Desplazamiento Clockwise (en sentido horario) a posición 7MPV: CW Posición 7
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 7MPV: CCW Posición 7
Desplazamiento Clockwise (en sentido horario) a posición 8MPV: CW Posición 8
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 8MPV: CCW Posición 8
Desplazamiento Clockwise (en sentido horario) a posición 9MPV: CW Posición 9
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 9MPV: CCW Posición 9
Desplazamiento Clockwise (en sentido horario) a posición 10MPV: CW Posición 10
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 10MPV: CCW Posición 10
Desplazamiento Clockwise (en sentido horario) a posición 11MPV: CW Posición 11
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 11MPV: CCW Posición 11
Desplazamiento Clockwise (en sentido horario) a posición 12MPV: CW Posición 12
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 12MPV: CCW Posición 12
Desplazamiento Clockwise (en sentido horario) a posición 13MPV: CW Posición 13
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 13MPV: CCW Posición 13
Desplazamiento Clockwise (en sentido horario) a posición 14MPV: CW Posición 14
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 14MPV: CCW Posición 14
Desplazamiento Clockwise (en sentido horario) a posición 15MPV: CW Posición 15
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 15MPV: CCW Posición 15
Desplazamiento Clockwise (en sentido horario) a posición 16MPV: CW Posición 16
Desplazamiento Counter Clockwise (en sentido anti-horario) a posición 16MPV: CCW Posición 16
Desplazamiento Clockwise (en sentido horario) del actuadorMPV DriveCW
Desplazamiento Counter Clockwise (en sentido anti-horario) del actuadorMPV DriveCCW
Señal de control de contactos de salidaEntrada DIN 1
Señal de control de contactos de salidaEntrada DIN 2
Señal de control de contactos de salidaEntrada DIN 3
Señal de control de contactos de salidaEntrada DIN 4
147
Control de actuadorAC 01.2/ACExC 01.2 Anexo
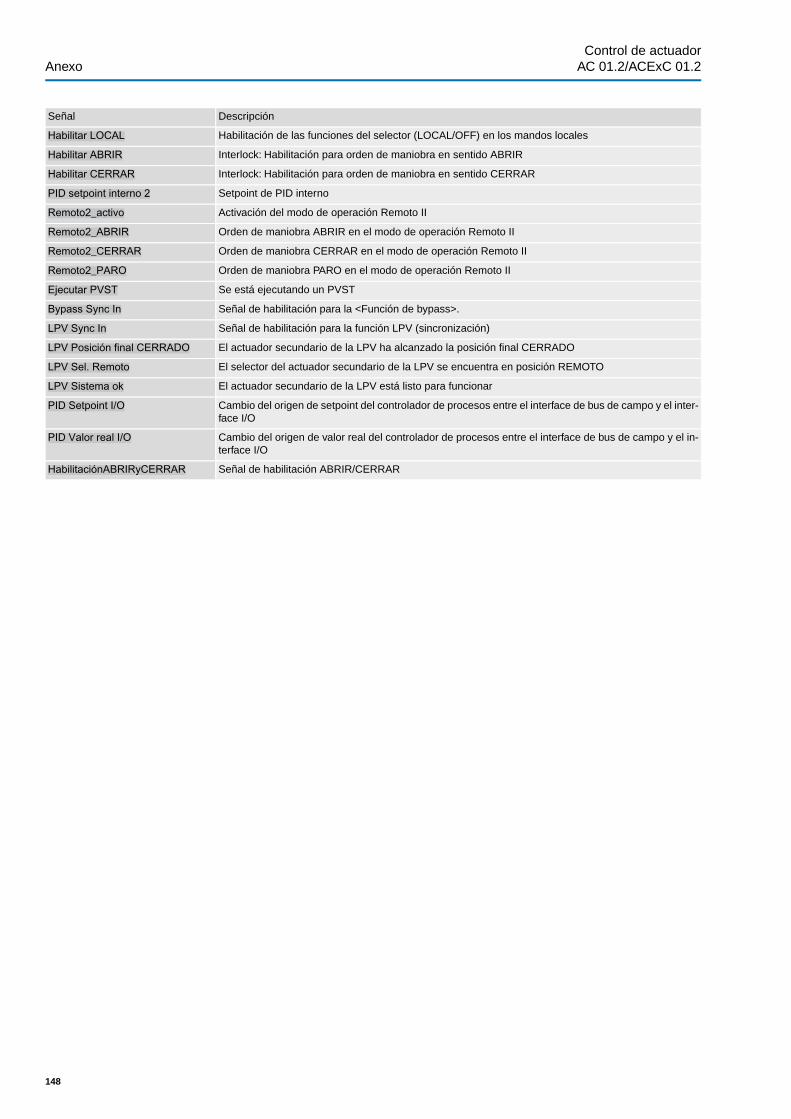
DescripciónSeñal
Habilitación de las funciones del selector (LOCAL/OFF) en los mandos localesHabilitar LOCAL
Interlock: Habilitación para orden de maniobra en sentido ABRIRHabilitar ABRIR
Interlock: Habilitación para orden de maniobra en sentido CERRARHabilitar CERRAR
Setpoint de PID internoPID setpoint interno 2
Activación del modo de operación Remoto IIRemoto2_activo
Orden de maniobra ABRIR en el modo de operación Remoto IIRemoto2_ABRIR
Orden de maniobra CERRAR en el modo de operación Remoto IIRemoto2_CERRAR
Orden de maniobra PARO en el modo de operación Remoto IIRemoto2_PARO
Se está ejecutando un PVSTEjecutar PVST
Señal de habilitación para la <Función de bypass>.Bypass Sync In
Señal de habilitación para la función LPV (sincronización)LPV Sync In
El actuador secundario de la LPV ha alcanzado la posición final CERRADOLPV Posición final CERRADO
El selector del actuador secundario de la LPV se encuentra en posición REMOTOLPV Sel. Remoto
El actuador secundario de la LPV está listo para funcionarLPV Sistema ok
Cambio del origen de setpoint del controlador de procesos entre el interface de bus de campo y el inter-face I/O
PID Setpoint I/O
Cambio del origen de valor real del controlador de procesos entre el interface de bus de campo y el in-terface I/O
PID Valor real I/O
Señal de habilitación ABRIR/CERRARHabilitaciónABRIRyCERRAR
148
Control de actuadorAnexo AC 01.2/ACExC 01.2
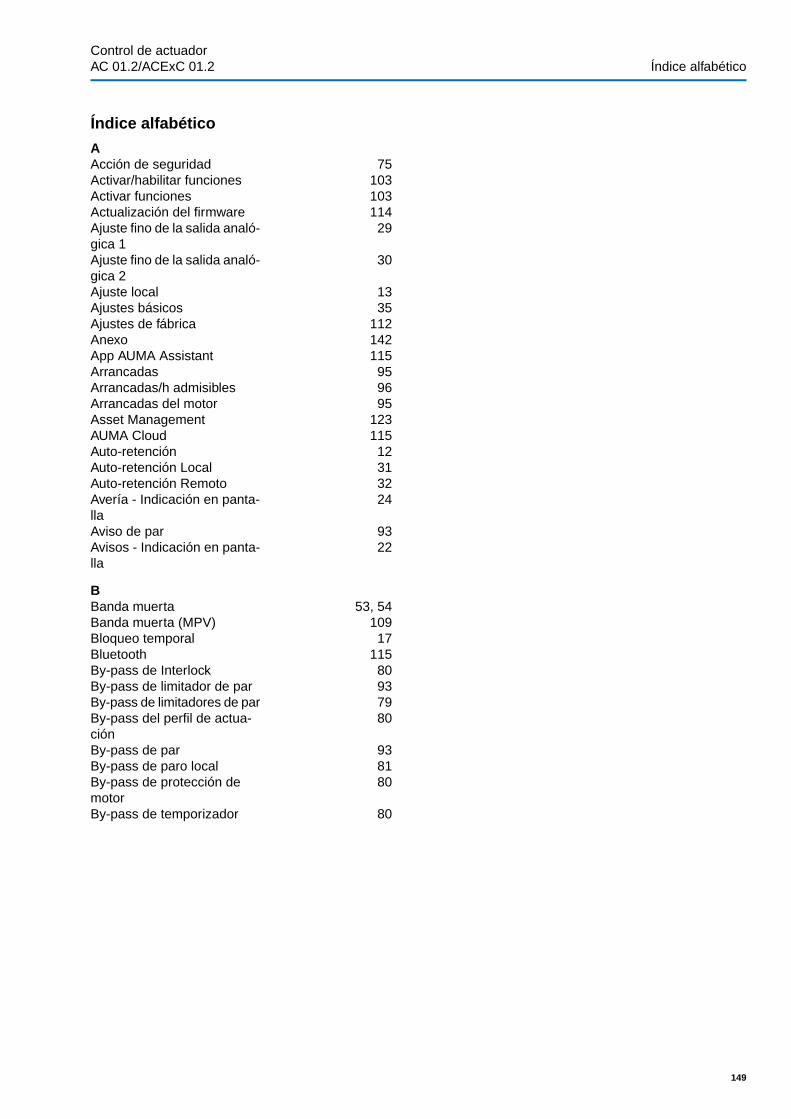
Índice alfabético
AAcción de seguridad 75Activar/habilitar funciones 103Activar funciones 103Actualización del firmware 114Ajuste fino de la salida analó-gica 1
29
Ajuste fino de la salida analó-gica 2
30
Ajuste local 13Ajustes básicos 35Ajustes de fábrica 112Anexo 142App AUMA Assistant 115Arrancadas 95Arrancadas/h admisibles 96Arrancadas del motor 95Asset Management 123AUMA Cloud 115Auto-retención 12Auto-retención Local 31Auto-retención Remoto 32Avería - Indicación en panta-lla
24
Aviso de par 93Avisos - Indicación en panta-lla
22
BBanda muerta 53, 54Banda muerta (MPV) 109Bloqueo temporal 17Bluetooth 115By-pass de Interlock 80By-pass de limitador de par 93By-pass de limitadores de par 79By-pass del perfil de actua-ción
80
By-pass de par 93By-pass de paro local 81By-pass de protección demotor
80
By-pass de temporizador 80
149
Control de actuadorAC 01.2/ACExC 01.2 Índice alfabético
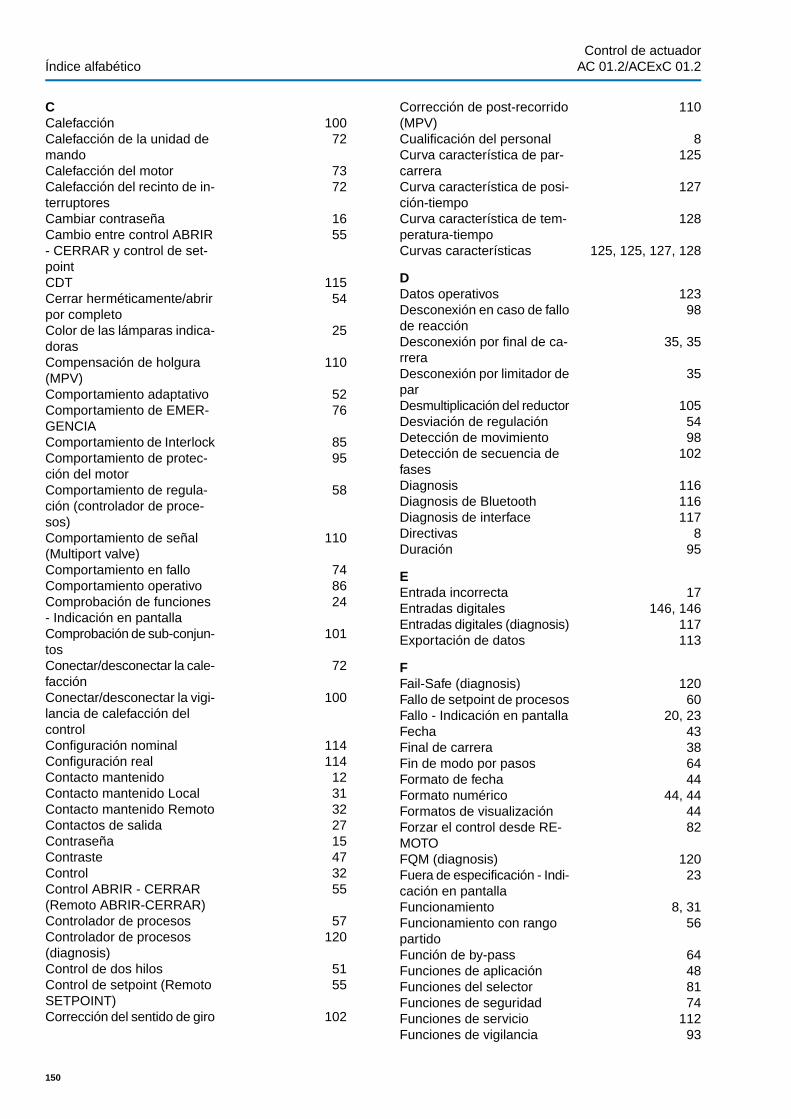
CCalefacción 100Calefacción de la unidad demando
72
Calefacción del motor 73Calefacción del recinto de in-terruptores
72
Cambiar contraseña 16Cambio entre control ABRIR- CERRAR y control de set-point
55
CDT 115Cerrar herméticamente/abrirpor completo
54
Color de las lámparas indica-doras
25
Compensación de holgura(MPV)
110
Comportamiento adaptativo 52Comportamiento de EMER-GENCIA
76
Comportamiento de Interlock 85Comportamiento de protec-ción del motor
95
Comportamiento de regula-ción (controlador de proce-sos)
58
Comportamiento de señal(Multiport valve)
110
Comportamiento en fallo 74Comportamiento operativo 86Comprobación de funciones- Indicación en pantalla
24
Comprobación de sub-conjun-tos
101
Conectar/desconectar la cale-facción
72
Conectar/desconectar la vigi-lancia de calefacción delcontrol
100
Configuración nominal 114Configuración real 114Contacto mantenido 12Contacto mantenido Local 31Contacto mantenido Remoto 32Contactos de salida 27Contraseña 15Contraste 47Control 32Control ABRIR - CERRAR(Remoto ABRIR-CERRAR)
55
Controlador de procesos 57Controlador de procesos(diagnosis)
120
Control de dos hilos 51Control de setpoint (RemotoSETPOINT)
55
Corrección del sentido de giro 102
Corrección de post-recorrido(MPV)
110
Cualificación del personal 8Curva característica de par-carrera
125
Curva característica de posi-ción-tiempo
127
Curva característica de tem-peratura-tiempo
128
Curvas características 125, 125, 127, 128
DDatos operativos 123Desconexión en caso de fallode reacción
98
Desconexión por final de ca-rrera
35, 35
Desconexión por limitador depar
35
Desmultiplicación del reductor 105Desviación de regulación 54Detección de movimiento 98Detección de secuencia defases
102
Diagnosis 116Diagnosis de Bluetooth 116Diagnosis de interface 117Directivas 8Duración 95
EEntrada incorrecta 17Entradas digitales 146, 146Entradas digitales (diagnosis) 117Exportación de datos 113
FFail-Safe (diagnosis) 120Fallo de setpoint de procesos 60Fallo - Indicación en pantalla 20, 23Fecha 43Final de carrera 38Fin de modo por pasos 64Formato de fecha 44Formato numérico 44, 44Formatos de visualización 44Forzar el control desde RE-MOTO
82
FQM (diagnosis) 120Fuera de especificación - Indi-cación en pantalla
23
Funcionamiento 8, 31Funcionamiento con rangopartido
56
Función de by-pass 64Funciones de aplicación 48Funciones del selector 81Funciones de seguridad 74Funciones de servicio 112Funciones de vigilancia 93
150
Control de actuadorÍndice alfabético AC 01.2/ACExC 01.2
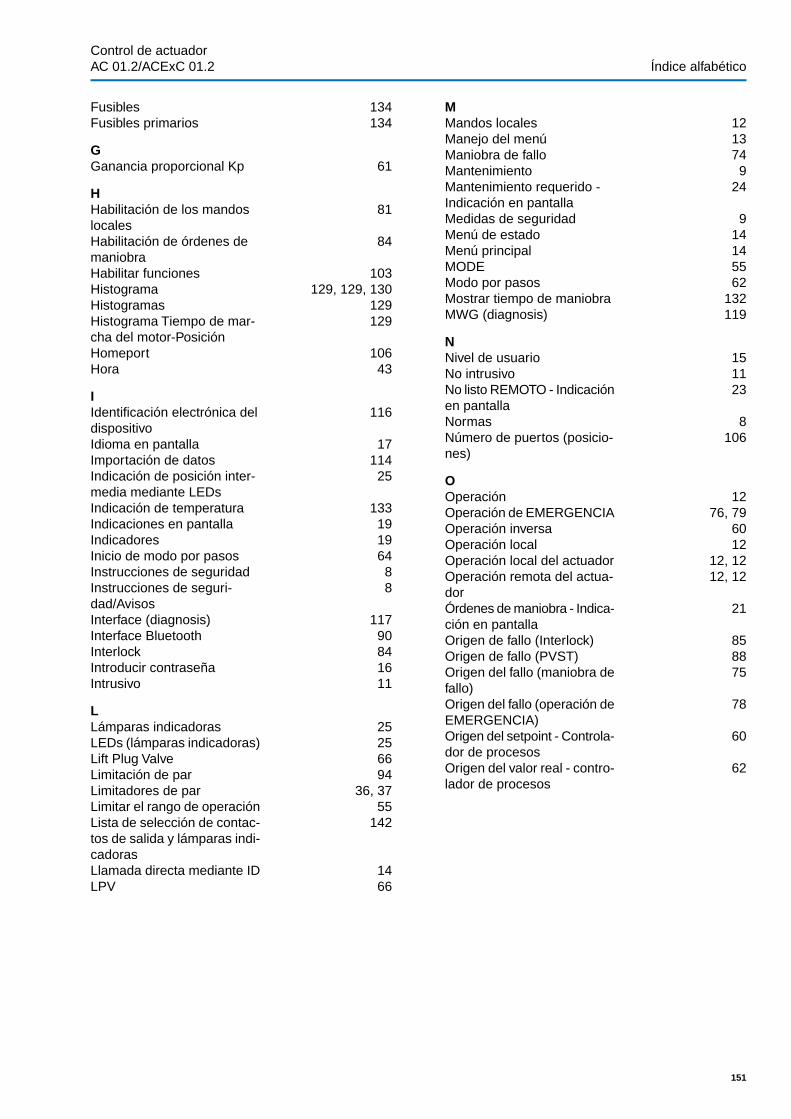
Fusibles 134Fusibles primarios 134
GGanancia proporcional Kp 61
HHabilitación de los mandoslocales
81
Habilitación de órdenes demaniobra
84
Habilitar funciones 103Histograma 129, 129, 130Histogramas 129Histograma Tiempo de mar-cha del motor-Posición
129
Homeport 106Hora 43
IIdentificación electrónica deldispositivo
116
Idioma en pantalla 17Importación de datos 114Indicación de posición inter-media mediante LEDs
25
Indicación de temperatura 133Indicaciones en pantalla 19Indicadores 19Inicio de modo por pasos 64Instrucciones de seguridad 8Instrucciones de seguri-dad/Avisos
8
Interface (diagnosis) 117Interface Bluetooth 90Interlock 84Introducir contraseña 16Intrusivo 11
LLámparas indicadoras 25LEDs (lámparas indicadoras) 25Lift Plug Valve 66Limitación de par 94Limitadores de par 36, 37Limitar el rango de operación 55Lista de selección de contac-tos de salida y lámparas indi-cadoras
142
Llamada directa mediante ID 14LPV 66
MMandos locales 12Manejo del menú 13Maniobra de fallo 74Mantenimiento 9Mantenimiento requerido -Indicación en pantalla
24
Medidas de seguridad 9Menú de estado 14Menú principal 14MODE 55Modo por pasos 62Mostrar tiempo de maniobra 132MWG (diagnosis) 119
NNivel de usuario 15No intrusivo 11No listo REMOTO - Indicaciónen pantalla
23
Normas 8Número de puertos (posicio-nes)
106
OOperación 12Operación de EMERGENCIA 76, 79Operación inversa 60Operación local 12Operación local del actuador 12, 12Operación remota del actua-dor
12, 12
Órdenes de maniobra - Indica-ción en pantalla
21
Origen de fallo (Interlock) 85Origen de fallo (PVST) 88Origen del fallo (maniobra defallo)
75
Origen del fallo (operación deEMERGENCIA)
78
Origen del setpoint - Controla-dor de procesos
60
Origen del valor real - contro-lador de procesos
62
151
Control de actuadorAC 01.2/ACExC 01.2 Índice alfabético
PPantalla (indicaciones) 19Par (histograma) 130Par - Indicación en pantalla 21Paro de EMERGENCIA 33Paro local 85Partial Valve Stroke Test 87Pérdida de señal 74, 75, 75Pérdida de señal de setpointde procesos
60
Perfil de actuación 50Posicionador 52Posicionador (diagnosis) 119Posicionador - Indicación enpantalla
22
Posición de la válvula - Indica-ción en pantalla
20
Posiciones (puntos de pivote) 48Posiciones intermedias 48Post-recorrido 53Potenciómetro (diagnosis) 118Prioridad REMOTO 82Protección de sobrecarga 93Protocolo de eventos 124Puesta en servicio 8Puesta en servicio (indicacio-nes en la pantalla)
19
PVST 87
RRango de señal de la salidaanalógica 1
29
Rango de señal de la salidaanalógica 2
30
Retardo (comportamiento deEMERGENCIA)
81
Retardo (comportamiento enfallo)
76
RWG (diagnosis) 119
SSalida analógica 1 28Salida analógica 2 30Salidas analógicas 28Salidas digitales 27Salidas digitales (diagnosis) 117Sentido de giro 102, 112, 112Señal de avería - configurable 27Señales 27Señales (analógicas) 28Señales analógicas 28Señales configurables 27Señales - configurables 27Señales de entrada binarias 146Señales de estado 27Señales de estado - configu-rables
27
Señales de mantenimiento 131Señales de salida 27Servicio 33Setpoint de procesos – fallo 60Setpoint - Indicación en pan-talla
22
Setpoint interno de proceso 60Simulación 121Sistema automático de lava-do
70
Sistema de calefacción 100Sistema de calefacción delcontrol
72
Sistema electrónico VigilanciaAlimentación de tensión
99
Solución de fallos 134
152
Control de actuadorÍndice alfabético AC 01.2/ACExC 01.2
TTemperatura (motor) 129Temperaturas del dispositivo 133Tiempo de acción Td 61Tiempo de maniobra, admisi-ble
97
Tiempo de marcha 64, 95Tiempo de marcha (motor) 129, 129, 130Tiempo de marcha del motor-Par (histograma)
130
Tiempo de marcha del motor-Temperatura (histograma)
129
Tiempo de pausa 51, 64Tiempo de pérdida 101Tiempo de reacción 98Tiempo de reacción, admisi-ble
98
Tiempo de reacción de vigilan-cia de calefacción
101
Tiempo de reset Ti 61Tiempo de vigilancia de cale-facción
101
Tiempo muerto 54Tiempo previo de inversión 74Tipo de actuador (MPV) 105Tipo de desconexión paraposiciones finales
35
Tolerancia de posiciones fina-les
54
Toolsuite 114Transmisor de posición(diagnosis)
118
UUnidad de magnitud de proce-sos
46
Unidad de par 44Unidad de posición 45Unidad de salidas de señal(AOUT)
47
Unidad de temperatura 45Unidad de valores de trabajo(AIN)
46
VValor real - Indicación enpantalla
21
Variantes de producto 105Versión de firmware 114Vigilancia de la calefacción 100Vigilancia de la duración deconexión (diagnosis)
120
Vigilancia de la protección delmotor
95, 95
Vigilancia de la temperatura 100Vigilancia del sistema de cale-facción
100
Vigilancia de par 93Vigilancia de pérdida de fase 101Vigilancia de reacción 97Vigilancia de tiempo de opera-ción
97
Vigilancia térmica 95
153
Control de actuadorAC 01.2/ACExC 01.2 Índice alfabético
Relación de parámetros
90, 90, 92, 92
00/4 mA (valor inicial) 30
220 mA (final value) 3024 V DC cliente 13924 V DC externo 13524 V DC interno 139
AAceptar conf.actual 114Activ. sal. señ. (AOUT) 47Activación 90, 90Actualizar Firmware 114Adaptar sentido giro 102Advertencias (Cfg) 28Ajust. P.F.ABIERTO? 39, 42Ajust. P.F.CERRADO? 39, 42Ajuste fino AOUT 1 30Ajuste fino AOUT 2 30Ampl tens potenc 118Aplicación by-pass 66Arrancadas admisibles 96Automático de lavado 71Auto-retenc. LOCAL 31Av, sin reacción 135Av Bandas muertas 138Av calefacción 139Av entrada AIN 1 135, 137Av entrada AIN 2 135, 137Avería 134Avería (configurable) 28Aviso configuración 135, 135, 138Aviso interno 135, 135, 139Avisos 134Av marca evento 140Av marca Tm 140Av Modo op. Arrancadas 135Av Modo op. Tiempo marcha 135Av Origen Setpoint 138Av par ABRIR 135Av Parámetros de reemplazoen uso
139
Av par CERRAR 135Av pérd.señ.posic.real 140Av pos.setpoint 135Av posic.real ref. 140Av rango posic.real 140Av temp. control 135Av tiempo man. 135Av tiempo marcha 1 96Av tiempo marcha 2 96
BBanda muer ext ABIE 120Banda muer ext CERR 120Banda muer int ABIE 120Banda muer int CERR 120Banda muerta ABRIR 53Banda muerta CERR. 53Banda muerta ext. 54Bloqueado 137By-pass Enclav. 81By-pass par 80, 94By-pass par [s] 94By-pass PARO local 81By-pass perfil operac. 80By-pass temporizador 80By-pass térmico 80
154
Control de actuadorRelación de parámetros AC 01.2/ACExC 01.2
CCalefacción unidad mando 72Calibration 140Calidad sum.eléctrico 136Cambiar contraseñas 16Cancel. PVST 135Carrera máxima 119Carrera mínima 119Carr PVST 89Codificación DOUT 1 27Color lámp. ind. 1 26Color lámp. ind. 2 26Color lámp. ind. 3 26Color lámp. ind. 4 26Color lámp. ind. 5 26Commlost 141Comp. adaptativo 52, 120Comp.EMERG. activo 137Comp. EMERGENCIA 77Comp.fallo activo 135Compensación de holgura 110Comport. actuador 98Comport. en fallo 74Comport. operación 50Comport. operación 1 50Comport. PVST 88Comport. señal 48Comport. señal 1 48Comportamiento de activa-ción EMERG.
78
Comportamiento de señal 110Comprob. funciones 134Conf. comp. fallo 138Conf. EMERGENCIA 138Conf. reg. PID 138Conf. vigil. calef. 138Config. par ABRIR 138Config. par CERRAR 138Config.perfil.operac. 138Configuración DIN 1 138Configuración FO 138Configuración FUP 138Controlador proceso 58Crear ajustes fábrica 113Curvas 125, 126, 127, 127, 127,
128, 128
DDatos oper. 123Delay HA sentido ABRIR 70Delay HA sentido CERRAR 70Delay NA sentido CERRAR 70Desmultiplicación reductor 105Detector movimiento 98Dif.recorrido dx 99Dif.recorrido dx (MWG) 99Direcc.par. Bluetooth 115, 117Dirección Bluetooth 115, 117Disp. maniobra motor 74Duración de conexión 120
EEI 24 V AC 139EI acceso archivo 139EI Bus de campo 139EI calibración MWG 139EI config.parámetro 138EI config.trans.posic. 138EI conf par rem 140EI EEPROM 139EI ErrorCalibr Hall1 139EI ErrorCalibr Hall5 139EI Excepción Bus 139EI Excepción LC 139EI Excepción Lógica 139EI Exepción MWG 139EI Interface I/O 140EI interface Remoto 140EI Lógica 139EI Mandos Locales 139EI MCM 138EI MWG 139EI parámetro 139EI Parámetros de reemplazo 139EI pos.finales MWG 139EI PSO 138EI registro 139EI salida defect. 139EI selector 139EI startup FB 139EI startup módulo 139EI trans.posición 139EI versión 139EI vigil.prot.mot. 139EI vigilancia fase 139Enclavamiento 84Entrada AIN 1 29Entrada AIN 2 29Entrada Setpoint de posición 56Error configuración 136, 136, 137, 138Escalada 45, 46, 47, 47Estado interface 117Estados AIN 1 117Estados AIN 2 117Estados AOUT 1 117Estados AOUT 2 117Estados DIN 117Estados DOUT 117Eventos filtro eventos 124Exp.todos parámetros 113Exportar inf. eventos 113Exportar todos datos 113
155
Control de actuadorAC 01.2/ACExC 01.2 Relación de parámetros
FFallo 134Fallo (Cfg) 28Fallo conf. REMOTO 136, 136, 140Fallo de fase 136, 138Fallo hidráulico 138Fallo interno 136, 136, 139Fallo par ABRIR 136Fallo par CERRAR 136Fallo PVST 135Fallo SIL 136Fallo sin reacción 137Fallo térmico 137, 138Fecha y hora 44Finales de carrera 39, 41Fin pasos ABRIR 64Fin pasos CERRAR 64Firmware 114Formato de hora 44Formato de número 44FQM 120FQM Fallo Fail-Safe 140FQM Fallo Temp-Tens 140FQM FS-PosOk 120FQM FS-Ready 120FQM pos. final Fail-Safe 120FQM Timeout Limit 140FQM Timeout Motor 140FQM Timeout Tension 120, 140Fuente activación Interlock 85Fuera de especif. 134Función Bypass 66Funciones aplicación 90Función LPV 69Función SIL activa 138
GGiro para cerrar 112
HHistéresis 50, 111Histéresis 1 50Histéresis posic. ABR. 54Histéresis posic. CERR. 54Hora no ajustada 135
IID dispositivo 116Identificación 116Idioma 17IE FQM 138Imp. todos parámetr. 114Info operativa 123, 124Info operativa total 123Informe de eventos 124, 124, 125, 125, 125Inicio pasos ABRIR 64Inicio pasos CERRAR 64Intentos de lavado 71Interface 117Interface I/O 137Interlock Bypass 138Intervalo de mantenimiento 131Intervalo guardar 125Intervalo mantenimiento 132Intervalo pos-tiem 128Invalid command 140
LLámp.ind. 1 (izda.) 25Lámp.ind. 2 25Lámp.ind. 3 25Lámp.ind. 4 25Lámp.ind. 5 (dcha.) 25Limitación par 94Límite inf. Uspan 118Límite inferior AIN 1 56Límite oper. ABRIR 55Límite oper. CERRAR 55Límite superior AIN 1 56Limit rango operación 55Low-Limit RWG 119LPV no listo 137
MMagnitud de proceso 46, 46Magnitud proceso activación 46Mantenim. requerido 134Mantenimiento requerido 136Modo de operación 120Modo de rango partido 57Modo op. Enclavam. 85Modo oper. EMERGENC. 78Modo oper. PVST 88Modo operación 59, 97Modo pasos ABRIR 63, 63Modo pasos CERRAR 63, 63MPV Homeport 106MPV Homeport restabl. 106MPV y cierre en sentido hora-rio
138
156
Control de actuadorRelación de parámetros AC 01.2/ACExC 01.2
NNo listo REMOTO 134No listo REMOTO (Cfg) 28Not referenced 140Núm. arranc. motor / h 120Número puertos 106
OOperación EMERG. 79Operación en fallo 75Ord. oper. errónea 137, 139OrdenErrBus 139Orden errónea REMOTO1 139Orden errónea REMOTO2 139Orden oper regul PID 120Origen del fallo 75Origen fallo EMERG. 78Origen fallo PVST 88Out of range 140
PPar 28Par aviso ABRIR 93Par aviso CERRAR 93Par-Carrera 125, 126, 127, 127Par descon. ABRIR 37Par descon. CERRAR 37Par máximo [%] 95Paro EMERG. activo 137PARO local 86PCB failure 141Perfil actuación 50Pos. EMERGENCIA MPV 79Pos.final ABIERTO 35Pos.final CERRADO 35Pos. seguridad MPV 76Pos. Setpoint deshabil. 139Posición 45, 45Posición de activación 45Posición de seguridad ABRIRCERRAR
76
Posición EMERGENC. 79Posición real 28, 120Posición Setpoint 120Posición-tiempo 127Potenciómetro Out of Range 137Potenc trans posic 118Punto de pivote 1 48PVST activa 138PVST requerida 136
RRango de tolerancia 72Rango señal AOUT 1 29Rango señal AOUT 2 30Recargar idiomas 113Recordat PVST 89Regul proc 120Replacement value 141Reset curva caract. 126Reset datos operativos 124Restabl. ajustes fábr. 113Resultado Diag-FS FQM 120, 140Retardo 81, 99
SSalidas señaliz (AOUT) 47, 47Sec.fases incorrecta 136, 138Selec. act. princ/sec 69Selector no REMOTO 137Sensor failure 140Sent.marcha Enclavam. 85Sentido de giro incorrecto 137Señal AIN 1 56Señal AIN 2 56Señal AOUT 1 28Señal AOUT 2 30Señal colectiva FQM 137, 140Señal DOUT 1 27, 121Señal pos.intermedia 25Servicio activo 137Setpoint de posición - entrada 56Setpoint High-Limit 57Setpoint Low-Limit 57Setpoint proceso 120Sistema filtro eventos 124Solic. FQM FS-ESD 120
157
Control de actuadorAC 01.2/ACExC 01.2 Relación de parámetros
TTAG Dispositivo 115, 117Tam. arch. prot. eventos 125Tamaño del buffer 125Temp.Control norm ‰ 29Temp.UnidadMando Norm ‰ 29Temperaturas disp. 133Temperatura-tiempo 128Tensión RTC 135Tiemp.op.perm.manu. 97Tiempo de maniobra 133Tiempo de retardo 76Tiempo det. dt (MWG) 99Tiempo detección dt 99Tiempo disparo 102Tiempo invers PVST 89Tiempo man. PVST 89Tiempo marcha ABR. 64Tiempo marcha admisible 97Tiempo marcha CERR 64Tiempo pausa 1 51Tiempo pausa ABR. 64Tiempo pausa CERR. 64Tiempo prev.inversión 74Tiempo recordat PVST 90Tiempos pausa 51Tiempo vigil. calef. 101Tipo de actuador 105Tipo desconexión 35Tolerancia ABRIR 54Tolerancia CERRAR 54Tpo deplaz. sentido contr. 71Transm posición MWG 119Transm posición RWG 119
UUnidad 45, 46, 47, 47Unidades 45, 45, 46, 46, 46,
47, 47, 47Unidad temperatura 45
VVal. trab. act. (AIN) 46Val absoluto 119Val abs posfinABIE 119Val abs posfinCERRADO 119Valor bruto pos. final ABIER-TO
118, 119
Valor bruto pos. final CERRA-DO
118, 119
Valor bruto potenciómetro/mV
119
Valor bruto RWG /mA 119Valores de trabajo (AIN) 46, 47Valor máx. al 100,0 % 45, 46Valor máx. al 100.0 % 47, 47Valor real proceso 120Versión 116Vigil. modo operación 96Vigil. sistema calef. 100Vigil. tiempo oper. 97, 97Vigilancia 24 V DC cli. 99Vigilancia 24 V DC ext. 100Vigilancia calefacción 101Vigilancia de fase 102Vigilancia PVST 89Vigilancia reacción 98, 98Volante activo 138
158
Control de actuadorRelación de parámetros AC 01.2/ACExC 01.2

159
AUMA Riester GmbH & Co. KG
P.O. Box 1362DE 79373 MuellheimTel +49 7631 809 - 0Fax +49 7631 809 - [email protected]
AUMA Iberia, S.L.U.ES 43480 Vila-Seca (Tarragona)Tel. +34 977 391 [email protected]
Y004.735/007/es/1.20
Encontrará información detallada sobre los productos de AUMA en Internet: www.auma.com




















