Heat production: Longitudinal versus torsional phacoemulsification

INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROLInt. J. Robust Nonlinear Control (2013)Published online in Wiley Online Library (wileyonlinelibrary.com). DOI: 10.1002/rnc.3100
Constraint adaptive output regulation of output feedback systemswith application to electrostatic torsional micromirror
Weijie Sun1,*,†, Jianglin Lan1 and John T. W. Yeow2
1College of Automation Science and Engineering, South China University of Technology, Wushan,Guangzhou 510640, China
2Advanced Micro/Nano Devices Laboratory, Systems Design Engineering, University of Waterloo,Waterloo, ON, N2L 3G1, Canada
SUMMARY
This paper studies a constraint adaptive output regulation design for a class of nonlinear systems with anunknown exosystem by output feedback control. First, by introducing an internal model with some knowndesign parameter, our concerned problem may be formulated as a specific regulation problem with outputconstraint. Then, the barrier Lyapunov function technique is further integrated to approach the problem. Itis shown that such a constraint adaptive output regulation problem is solvable without constraint violation.In particular, the constructed regulator cannot only keep the boundedness of the closed-loop system signalsbut also guarantees the parameter convergence for the unknown parameter vector in the exosystem. As anapplication, it is illustrated that our result is applicable in tracking the control of an electrostatic torsionalmicromirror with physical geometry constraint. Copyright © 2013 John Wiley & Sons, Ltd.
Received 24 April 2013; Accepted 8 October 2013
KEY WORDS: nonlinear systems; internal model; microelectromechanical systems; output feedback;robust control; adaptive control
1. INTRODUCTION
The output regulation is a general feedback control problem that aims to design a controller suchthat, in addition to closed-loop stability, the real output of the controlled plant could achieveasymptotic tracking of reference trajectories and/or asymptotic rejection of external disturbances.The reference as well as the disturbance is usually modeled and can be generated by the so-called exosystem. Linear output regulation has been studied since the 1970s [1]. The nonlinearoutput regulation problem has been extensively studied in the last more than three decades. See[2, 3] for a brief overview. Established in [4], nonlinear output regulation can be systematicallytackled on the basis of a general framework that essentially provides two steps to construct aregulator. The first step is the internal model design. Then, in the second step, one can considera relatively more tractable stabilization problem for an augmented system that is defined as acombination of the plant dynamics and the designed internal model. The solution to the stabiliza-tion problem can lead to the desired regulator. Thus, the internal model design and some tractableaugmented system derivation are the keys to achieve the output regulation. Nonetheless, stabiliza-tion may be challenging, especially when dealing with augmented systems [5–9]. On the basis ofthis framework, various scenarios of the output regulation problem have been addressed in [4–9]and some references therein. It has also promoted a wide variety of application studies such as
*Correspondence to: Weijie Sun, College of Automation Science and Engineering, South China University ofTechnology, Wushan, Guangzhou 510640, China.
†E-mail: [email protected]
Copyright © 2013 John Wiley & Sons, Ltd.
W. SUN, J. LAN AND J. T. W. YEOW
chaos cancelation or synchronization of nonlinear dynamic systems by feedback control [10, 11],speed tracking control of a PM synchronous motor [12], attitude tracking and disturbance rejec-tion of spacecraft [13, 14], tracking control of microelectromechanical systems (MEMS) [8], andcooperative control of multi-agent systems [15–17].
Recently, Zhang and Lan [18] studied the output regulation problem for linear systems with inputsaturation, in which the transient performance was carefully addressed using a composite nonlinearfeedback control technique. Although the enhanced output regulation performance for linear sys-tems has been considered [18], very few results are found for the nonlinear output regulation. Withthis consideration, it motivates us to study an output regulation problem of nonlinear systems with anotable error output constraint. By constraint output regulation design, the desired regulator shouldnot only regulate the error output to zero asymptotically but also confine the regulation error withinsome prior boundary during its transient period. Our theoretical study is important in practice. Forexample, as it will be shown later in this paper, the MEMS in nanoscale are quite sensitive to phys-ical geometry constraints [8, 19]. Sun et al. [8] have shown that when dealing with the situation oferror constraint, the traditional quadratic Lyapunov function (QLF) design in the output regulationproblem is of lowered efficiency. Thus, we have to employ a suitable barrier Lyapunov function(BLF) to cope with this physical challenge.
In the last few years, the BLF technique has been successfully applied to deal with variableconstraint problems. The basic idea of this technique is to tailor the Lyapunov function based on theactual requirements of the constraint control problem. In contrast to the conventional QLF, the mainproperty of BLF is that it may increase to infinity as long as its argument approaches its fixed finiteboundary [20], similar to the radially unbounded condition normally imposed on the Lyapunov func-tion in global stability. This boundary limit can be carefully assigned to meet with the actual desiredconstraint barriers. Therefore, it is useful in constraint feedback control and if a BLF is boundedfor the closed-loop system, then the desired barriers would not be transgressed. Indeed, BLF-baseddesign has been applied for the constraint problem of nonlinear systems [8, 20–23]. The works[20–22] focused on adaptive asymptotic tracking control problems for nonlinear systems, whereasYan and Wang [23] applied multiple BLFs to a three-stage switching control for a non-equilibriumtransient trajectory shaping problem. For output regulation design, Sun et al. [8] have addressed astatic constraint output regulation problem for a parallel-plate electrostatic actuator. However, theoutput regulation problem with static constraint makes the design conservative because it definesthe barrier limit based on the constant bound of error output under the worst case.
On the basis of the time-varying symmetric BLF, the objective of this paper is to investigatethe realistic situation of time-varying constraint adaptive output regulation for a class of nonlinearsystems with an unknown exosystem. Specifically, in the time-varying constraint case, the barrierlimit is expected to vary with the desired trajectory in time. Thus, the time-varying constraint outputregulation design is much more applicable to the complicated control environment particularly inthe field of nanopositioning control [24]. The main contribution is summarized as follows. First,by employing a time-varying constraint, it is shown that a much more stringent requirement maybe imposed on the transient behavior of the error output. Second, the constraint adaptive outputregulation problem proposed in this paper includes the output regulation problem with static outputconstraint as a special case. Finally, we apply the result to an electrostatic torsional micromirrorto improve its performance beyond the pull-in limit, which shows the potential effectiveness of theconstraint adaptive output regulation design in practice.
The rest of this paper is organized as follows. In Section 2, the constraint adaptive output reg-ulation problem is formulated and further transformed into a constraint regulation problem byemploying the adaptive internal model principle. In Section 3, the solution of the constraint reg-ulation problem is presented by using BLF technique, which in turn implies the solution of theconstraint adaptive output regulation problem. In Section 4, BLF and QLF approaches are com-pared, and some practical design considerations are discussed. In Section 5, an application to anelectrostatic torsional micromirror is shown to illustrate the effectiveness of the constraint adaptiveoutput regulation design. Finally, Section 6 gives some conclusions.
Throughout this paper, we denote by Rn the n-dimensional Euclidean space, RC is the set ofnon-negative real numbers, In is the n�n identity matrix, and k � k is the Euclidean vector norm of
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

CONSTRAINT ADAPTIVE OUTPUT REGULATION OF OUTPUT FEEDBACK SYSTEMS
�. The notations 2 and � in the expression such as w 2W � Rp mean that w is a member of W ,and W is a compact subset of Rp . For a number of m column vectors x1, : : : , xm, .x1, : : : , xm/> is
used to denote�x>1 , : : : , x>m
�>.
2. PROBLEM FORMULATION AND PRELIMINARIES
Consider a class of nonlinear systems described by
P D F.w/´CG.y, v,w/y CD1.v,w/
Py DH.w/´CK.y, v,w/y C b.w/�1CD2.v,w/
P�i D��i�i C �iC1, i D 1, : : : , r � 2
P�r�1 D��r�1�r�1C u
e D y � q.v,w/ (1)
where .´, y/> 2Rn and � D .�1, : : : , �r�1/> 2Rr�1 are the states, y 2R is the output, u 2R is thecontrol input, e 2 R is the tracking error, w 2W � Rp is the uncertain parameter, and v 2 V � Rqis the exogenous signal generated by the exosystem
Pv D A1.�/v (2)
where � 2 S � Rl represents the unknown constant parameter. It is assumed that all the functionsin system (1) are sufficiently smooth with D1.0,w/ D 0,D2.0,w/ D 0, q.0,w/ D 0, and F.w/ isHurwitz for each w 2W .
To formulate the constraint adaptive output regulation problem, we suppose that a time-varyingconstraint kb1.t/ is given to be bounded 0 < kb1.t/ 6 Kb0 and its time derivatives satisfy
j k.i/
b1.t/ j6Kbi , i D 1, : : : , r � 1, for positive constants Kb0 and Kbi , 8t > 0.
The problem is stated as follows. For a given S and a time-varying constraint kb1.t/ describedearlier, we find a dynamic feedback control law depending on .e, �/ such that for each .v.0/,w, �/ 2V�W�S and each other initial conditions with e.0/ in a fixed and known compact set, the trajectoryof the closed-loop system exists and is bounded for all t > 0. Moreover, the tracking error e.t/approaches zero asymptotically and satisfies
je.t/j< kb1.t/, 8t > 0.
The aforementioned output regulation problem is challenging because of the following. As usual,the error output should asymptotically approach zero under the unknown exosystem. An addi-tional condition here is that the error evolution should be confined within a desired region which ischaracterized by the time-varying function kb1.t/.
In the following, we shall employ the internal model approach in [6] to convert such a constraintadaptive output regulation problem of system (1) into a specific regulation problem of a semi-translated augmented system with output constraint. For this purpose, let us list some standingassumptions [6].
Assumption 2.1All eigenvalues of A1.�/ are distinct with zero real parts for all � 2 S .
Assumption 2.2b.w/ > 0 for all w 2W .
Assumption 2.3For all v 2Rq and w 2W , there exists a sufficiently smooth function z.v,w, �/ with z.0, 0, 0/D 0such that
@z.v,w, �/
@vA1.�/v D F.w/z.v,w, �/CG.q.v,w/, v,w/q.v,w/CD1.v,w/.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

W. SUN, J. LAN AND J. T. W. YEOW
Assumption 2.3 guarantees the existence of a solution to the regulator equations associatedwith the controlled system (1) and unknown exosystem (2). Denote the solution as .z.v,w, �/,y.v,w/,„.v,w, �//, and u.v,w, �/ corresponding to the state .´,y, �/ and input u, respectively.If the first element of „.v,w, �/, that is, „1.v,w, �/, is a polynomial in v with coefficientsdepending on w and � , then there exists �.v,w, �/ D .„1.v,w, �/, P„1.v,w, �/, : : : ,„s�11
.v,w, �//> for some positive constant s such that
d�.v,w, �/
dtDˆ.�/�.v,w, �/
„1.v,w, �/D‰�.v,w, �/ (3)
for all .v,w, �/ 2Rq �W � S , where
ˆ.�/D
�0.s�1/�1 Is�1
a1.�/ Œa2.�/ � � � as.�/�
�, ‰ D
�1 0 � � � 0
�.
Choose a controllable pair .M ,N/, where M 2 Rs�s is any Hurwitz matrix and N 2 Rs�1.Because the pair .‰,ˆ.�// is observable and all the eigenvalues of ˆ.�/ have zero real parts, thereis a unique and nonsingular matrix T .�/ 2Rs�s satisfying the Sylvester equation
T .�/ˆ.�/�MT.�/DN‰.
Let �.v,w, �/D T .�/�.v,w, �/, then
d�.v,w, �/
dtD T .�/ˆ.�/T �1.�/�.v,w, �/
„1.v,w, �/D‰T �1.�/�.v,w, �/. (4)
System (4) is called a linearly observable steady-state generator with output �1 of the systems (1)and (2). On the basis of the steady-state generator (4), we can define a dynamic system [6]
P�DM�CN�1 (5)
which is an internal model of the systems (1) and (2) with output �1.Performing on the system composed of (1) and (5) the following coordinate transformation
N D ´� z.v,w, �/
e D y � q.v,w/
N�D �� �.v,w, �/�Nb�1.w/e (6)
yields the so-called semi-translated augmented system in a lower triangular form [6]
PN D F.w/ N C QG.x1,/x1PN�DM N�CMNb�1.w/x1 �Nb
�1.w/�H.w/ N C QK.x1,/x1
�Px1 DH.w/ N C QK.x1,/x1C‰
�Nx1C b.w/‰� N�C b.w/ .x2 �‰
��/
Pxi D��i�1xi C xiC1, i D 2, : : : , r (7)
where x D .x1, : : : , xr/> D .e, �/>, xrC1 D u, D .v,w/>, ‰� D ‰T �1.�/, QG.x1,/x1 DG.qC x1,/.qC x1/�G.q,/q, and QK.x1,/x1 DK.qC x1,/.qC x1/�K.q,/q.
Remark 2.1The transformation of the original system (1) into (7) follows the standard procedure provided in [6].In this respect, if we can solve the regulation problem with output constraint for system (7) viewingx1 as the output, then the solution of the original constraint adaptive output regulation problem forsystem (1) can be determined. In contrast to solving the regulation problem of the semi-translatedaugmented system in [6], a much more rigorous issue is proposed. The specific transformed
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

CONSTRAINT ADAPTIVE OUTPUT REGULATION OF OUTPUT FEEDBACK SYSTEMS
regulation problem here requires that the constraint regulation state x1, that is, e, should approachzero while satisfying jx1.t/j< kb1.t/ with some prescribed given time-varying function kb1.t/.
In what follows, we will focus on solving the constraint regulation problem for system (7). Tothis end, we introduce the following lemma adopted from [20].
Lemma 2.1Let Z D ¹# 2R Wj # j< 1º �R and N DRl �Z �RlC1 be open sets. Consider the system
P�D h.t , �/
where � D .,#/> 2 N and h W RC � N ! RlC1 are piecewise continuous in t and locallyLipschitz in �, uniformly in t , on RC �N . Suppose that there exist functions U W Rl �RC! RCand V1 W Z ! RC, continuously differentiable and positive definite in their respective domains,such that
V1.#/!1 as j # j! 1
�1.kk/6 U., t /6 �2.kk/
where �1 and �2 are class K1 functions. Let V.�/D V1.#/CU., t / and #.0/ 2 Z . If
PV D@V
@�h6 0
in the set # 2 Z , then #.t/ 2 Z , 8t > 0.
3. MAIN RESULT
In this section, we will design an output feedback control law to solve the constraint adaptiveoutput regulation problem proposed in Section 2. According to Remark 2.1, we only need to solvethe constraint regulation problem of system (7) with x1 as the output.
3.1. Barrier Lyapunov function-based design
Let us first introduce two inequalities to be used later. Because QG.x1,/ and QK.x1,/ aresufficiently smooth functions satisfying QG.0,/ D 0 and QK.0,/ D 0, for each 2 RqCp andx1 2 R, there exist sufficiently smooth functions qi ./ > 1 and ai .x1/ > 1, i D 1, 2, such thatj QG.x1,/x1j2 6 q1./a1.x1/x21 and j QK.x1,/x1j2 6 q2./a2.x1/x21 .
Furthermore, it can be seen that the zero dynamics of system (7) with x1 as the output is given bythe subsystem . N , N�/. And the zero dynamic is input-to-state stable for all with x1 as an input. Infact, choose
U D Nl N> QP .w/ N C Nh N�>P N� (8)
where Nl and Nh are some positive constants, and QP .w/ and P are the positive definite solutions to theLyapunov equations
QP .w/F.w/CF>.w/ QP .w/D�In�1
PM CM>P D�Is
because both F.w/ and M are Hurwitz. Then, the time derivative of U along the subsystem . N , N�/satisfies
PU 6 ��Nl.1� �1k QP .w/k
2/� Nh��12 kH.w/k2�k Nk2
� Nh�1� �2kPMNb
�1.w/k2 � 2�2kPNb�1.w/k2
�k N�k2
C�Nl��11 q1./a1.x1/C Nh�
�12 q2./a2.x1/C 1
�x21
6 �lk Nk2 � hk N�k2C Nq1./s1.x1/x21
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

W. SUN, J. LAN AND J. T. W. YEOW
where l D Nl�1� �1k QP .w/k
2�� Nh��12 kH.w/k
2, h D Nh�1� �2kPMNb
�1.w/k2 � 2�2k
PNb�1.w/k2�, Nq1./ > max
�Nl��11 q1./, Nh��12 q2./, 1
�, and s1.x1/ D a1.x1/ C a2.x1/ C 1,
8�1, �2 > 0.Next, define Qx1 D x1
Qx2 D x2 � ˛1
�x1, k, kb1 , O‰, �
˛1
�x1, k, kb1 , O‰, �
D�k
�k2b1 � Qx
21
. Qx1/ Qx1C O‰�
�0 D 0
�1�x1, kb1 , �
�D�
�> Qx1
k2b1� Qx21
and for i D 2, : : : , r ,
QxiC1 D xiC1 � ˛i
�x1, : : : , xi , k, kb1 , O‰, �, Ob
˛i
�x1, : : : , xi , k, kb1 , O‰, �, Ob
D �i�1 � Qxi�1 � Qxi �
@˛i�1
@ Qx1
�2Qxi C �i
@˛i�1
@ O‰
C
0@ Ob � i�2X
jD2
QxjC1@˛j
@ Ob
1A @˛i�1
@ Qx1
�x2 � O‰�
�i�1
�x1, : : : , xi , k, kb1 , O‰, �, Ob
D �i�1xi C
@˛i�1
@kb1
Pkb1 C@˛i�1
@kPkC
i�1XjD2
@˛i�1
@xjPxj
C@˛i�1
@ Qx1�>
i�2XjD1
@˛j
@ O‰QxjC1C
@˛i�1
@�P�C
@˛i�1
@ Ob�i�1
�i�1
�x1, : : : , xi , k, kb1 , O‰, �, Ob
D �i�2 �
@˛i�1
@ Qx1Qxi
�x2 � O‰�
�i
�x1, : : : , xi , k, kb1 , O‰, �, Ob
D �i�1C
@˛i�1
@ Qx1�> Qxi .
In the aforementioned notations, . Qx1/ is a continuous positive design function determined inthe proof of Lemma 3.1, k is a dynamically generated high gain to dominate the uncertainties.� ,w/, and Ob and O‰ are the estimations of b.w/ and ‰� , respectively. Now, we can establish thefollowing lemma.
Lemma 3.1The feedback control law
uD ˛r
�x1, : : : , xr , k, kb1 , O‰, �, Ob
Pk D . Qx1/ Qx
21
POb D �r�1
�x1, : : : , xr , k, kb1 , O‰, �, Ob
PO‰ D �r
�x1, : : : , xr , k, kb1 , O‰, �, Ob
(9)
solves the constraint regulation problem of system (7).
ProofLet
Vblf D logk2b1.t/
k2b1.t/� Qx21.t/
(10)
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

CONSTRAINT ADAPTIVE OUTPUT REGULATION OF OUTPUT FEEDBACK SYSTEMS
where log.�/ denotes the natural logarithm of �. Denoting # D Qx1.t/kb1 .t/
, we can rewrite (10) into
Vblf D log 11�#2
. Clearly, Vblf is positive definite and continuously differentiable in the set j#j< 1.Then, we have
PVblf D2 Qx1
k2b1� Qx21
PQx1 � Qx1
Pkb1kb1
!
6 kH.w/k2k Nk2Ckb.w/‰�k2k N�k2
C
0B@q2./a2. Qx1/C 5�
k2b1� Qx21
2 Ck‰�N k2C Pkb1kb1
!21CA Qx21� 2b.w/k PkC
2b.w/ Qx1 Qx2
k2b1� Qx21
C 2b.w/�O‰ �‰�
Qx1�
k2b1� Qx21
.
Letting
V1 D U C Vblf C b.w/.k � Nk/2C b.w/k O‰ �‰�k2 (11)
yields
PV1 6 �.l � kH.w/k2/k Nk2 � .h� kb.w/‰�k2/k N�k2
C
0B@ Nq1./s1. Qx1/C q2./a2. Qx1/Ck‰�N k2C
Pkb1kb1
!2C
5�k2b1� Qx21
21CA Qx21
C2b.w/ Qx1 Qx2
k2b1� Qx21
� 2b.w/ Nk PkC 2b.w/�O‰ �‰�
�PO‰ � �1
>
where �1 D��> Qx1k2b1�Qx21
and Nk is some positive constant to be defined later.
Further, define
Vi D V1C
iXjD2
Qx2j C�Ob � b.w/
2PVi 6 �
�l � .2i � 1/kH.w/k2
�k Nk2 � .h� .2i � 1/kb.w/‰�k2/k N�k2
C
0@ Nq./s. Qx1/C .2i � 1/q2./a2. Qx1/C .2i � 1/k‰�N k2C
Pkb1kb1
!2
C5�
k2b1� Qx21
2 C b2.w/�k2b1� Qx21
2 C 1� 2b.w/ Nk . Qx1/1CA Qx21
C 2
[email protected]/ O‰ � b.w/‰� � i�1X
jD1
QxjC1
@˛j
@ O‰
�>1A� PO‰ � �i>
C 2
0@ Ob � i�1X
jD2
QxjC1@˛j
@ Ob� b.w/
1A� POb � �i�1� iX
jD2
Qx2j C 2 Qxi QxiC1
where we can obtain Nq./>max. Nq1./, b2.w/C 1/ and s. Qx1/> s1. Qx1/C 1.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

W. SUN, J. LAN AND J. T. W. YEOW
In the last step, by taking the control law (9) and noting QxrC1 D 0, we have
PVr 6 ��l � .2r � 1/kH.w/k2
�k Nk2 �
�h� .2r � 1/kb.w/‰�k2
�k N�k2
C��., Qx1, kb1/� 2b.w/
Nk . Qx1/�Qx21 �
rXjD2
Qx2j
where
��, Qx1, kb1
�D Nq./s. Qx1/C .2r � 1/q2./a2. Qx1/C .2r � 1/k‰
�N k2C
Pkb1kb1
!2
C5�
k2b1� Qx21
2 C b2.w/�k2b1� Qx21
2 C 1.
Because w 2 W with W is a compact set, it can be concluded that there exist positiveconstants Nl and Nh to ensure l � .2r � 1/kH.w/k2 > 1 and h � .2r � 1/kb.w/‰�k2 > 1.Noticing that v 2 V for a compact set V , we can obtain some positive function
�w, Qx1, kb1
�satisfying
�w, Qx1, kb1
�> 1=2 � b�1.w/
���, Qx1, kb1
�C 1
�. Then, there exist smooth positive
functions Nq�w, kb1
�and . Qx1/ with the property that Nq
�w, kb1
� . Qx1/ >
�w, Qx1, kb1
�. Choosing
Nk > Nq�w, kb1
�yields Nk . Qx1/ >
�w, Qx1, kb1
�. This leads to the fact that 2b.w/ Nk . Qx1/ �
��, Qx1, kb1
�> 1.
Hence,
PVr 6 �kNk2 � kN�k2 �rXjD1
Qx2j . (12)
Define Qxc D�N , N�, Qx1, Qx2, : : : , Qxr , k, Ob, O‰
>. Because Vr is positive definite and satisfies (12), we
can conclude that Qxc is bounded for all t > 0. Using (12) implies that N , N�, and Qxi , i D 1, : : : , rare square integrable on Œ0,1/. By Barbalat’s lemma, N , N� and Qxi , i D 1, : : : , r , approach zeroas t ! 1. According to the definition of N� in (6), � is bounded because v and w are bounded.Thus, xi as well as ˛i , i D 1, : : : , r , are bounded. Therefore, all the states and their derivativesof the closed-loop system composed of (7) and (9) are bounded. Furthermore, it is known that
limj Qx1j!kb1 logk2b1
k2b1�Qx21
D1. Using Lemma 2.1, we know that je.t/j< kb1.t/ if the initial condition
of e.t/ lies inside a pre-required region, that is, je.0/j< kb1.0/. Finally, the controller (9) solves theregulation problem for system (7) with output constraint. This completes the proof. �
Lemma 3.2The closed-loop system composed of (7) and (9) has the property that limt!1. O‰.t/�‰
� /D 0.
Proof
To show the property limt!1
�O‰.t/�‰�
D 0, we first notice that T .�/ is nonsingular, and
�.v.t/,w, �/ is persistently exciting [6]. Then, we would show that O‰.t/ satisfies
limt!1PO‰.t/D 0 (13)
limt!1
�O‰.t/�‰�
T .�/�.v.t/,w, �/D 0. (14)
In fact, (13) is easy to verify because ( Qx1, : : : , Qxr ) approaches zero as t !1 and PO‰.t/ is a linearfunction of Qx1, : : : , Qxr as can be seen from (9).
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

CONSTRAINT ADAPTIVE OUTPUT REGULATION OF OUTPUT FEEDBACK SYSTEMS
To prove (14), notice limt!1
�x2.t/� O‰�.t/
D 0 because . Qx1, Qx2/ approaches zero as
t ! 1. Next, it is known that limt!1 x1 D 0 and Px1 is uniformly continuous becauseRx1 is bounded. Using Barbalat’s lemma concludes limt!1 Px1 D 0. In addition, N , N� and x1approach zero as t ! 1. Thus, we obtain limt!1.x2.t/ � ‰
��.t// D 0 from the subsystem
x1 of (7). This leads to limt!1
�O‰ �‰�
�.t/ D 0. From the third equation of (6), noting
limt!1.� � T .�/�.v.t/,w, �// D 0 yields (14). By Theorem 4.1 of [6], O‰.t/ will converge to‰� asymptotically if a controller containing a minimal internal model is employed. �
Using Lemmas 3.1 and 3.2 provides our main result as follows.
Theorem 3.1Under Assumptions 2.1–2.3, the feedback controller composed of (5) and (9) solves the constraintadaptive output regulation problem of system (1) under exosystem (2).
3.2. Selection of error output constraint kb1.t/
In this paper, we employ a time-varying BLF technique to propose a constraint adaptive outputregulation design. It offers us a greater flexibility to incorporate various desired constraint area forthe error output. For example, we can select kb1.t/ D Le�ct C " with L, ", and c some positiveconstants that satisfy LC "6maxt>0¹je.t/jº. Its corresponding constraint area for the error outputis shown in Figure 1.
It could be seen that such a choice of constraint area theoretically features itself in the followingaspects. On the one hand, it imposes a much more stringent requirement on the transient behavior oferror output than using the static error output constraint LC ". On the other hand, by appropriatelyselecting the exponential convergence rate c and parameter ", the shorter time for error output toapproach zero could be expected.
Remark 3.1In our constraint adaptive output regulation design, any function .t/ that holds the followingproperties can be a candidate of kb1.t/: (i) .t/ is a smooth and bounded positive definitefunction and its time derivatives satisfy j .i/.t/ j6 i , i D 1, : : : , r � 1, for positive constants i , 8t > 0 and (ii) .t/ is monotone decreasing and asymptotically converges to a positive steadyvalue as t !1. There are many functions that satisfy the aforementioned properties, for example, .t/D 1
tCcC " with some positive constants c and ". However, in the constraint barrier kb1.t/, we
Figure 1. The constraint area.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

W. SUN, J. LAN AND J. T. W. YEOW
prefer an exponential function due to its easy realization in practical application. And it is somewhatlike the so-called performance function .t/ in [25]
.t/D . 0 � 1/e�lt C 1
where 0 and 1 are the initial and steady values of the performance function, respectively, and lis the exponential convergence rate of the error.
The time-varying function kb1.t/ can also be chosen to be static, which is defined on the basisof the allowed constant bound of error output e.t/ under the worst case, that is, maxt>0¹je.t/jº.This means that our proposed control design is applicable for the case of static error outputconstraint [8].
4. CONTROL REGION SPECIFICATION
4.1. Comparison with quadratic Lyapunov function
If the initial conditions of error output belong to some sets, it is possible to guarantee the constraintsatisfaction by appropriately selecting the controller parameters in QLF-based design. In this sub-section, we compare the initial error output requirements of BLF-based output regulation designwith those based on the use of QLF.
First, we consider the case where the BLF technique is used. According to Lemma 2.1, becausePVr 6 0, together with the definition of Vblf in (10), we can conclude that j#j D j Qx1.t/
kb1 .t/j < 1
leading to
j Qx1.t/j< kb1.t/. (15)
Thus, the initial error output requirement with BLF-based design is
j Qx1.0/j< kb1.0/. (16)
Remark 4.1Because PVr 6 0, it is known that Vr.t/ 6 Vr.0/. With the expression of V1 in (11) and theassumption that 0 < bmin 6 b.w/6 bmax , we know that Vr.0/ satisfies
Vr.0/6 �max. QP .w// Nlk N.0/k2C �max.P / Nhk N�.0/k2C logk2b1.0/
k2b1.0/� Qx21.0/
C 2bmax�k2.0/C Nk2
�
C 2bmax.k O‰.0/k2Ck‰�k2/C 2
�Ob2.0/C b2max
C
rXjD2
Qx2j .0/
D NVr
which implies that Vr.t/ 6 NVr . Then, we have logk2b1
k2b1�Qx21
6 NVr yieldingk2b1
k2b1�Qx21
6 e NVr . Because
k2b1.t/� Qx21.t/ > 0, we can obtain
j Qx1.t/j6 kb1.t/p1� e� NVr < kb1.t/ (17)
which shows that Qx1.t/ is in fact in a subset of (15), that is,
D D°Qx1 2R W j Qx1.t/j6 kb1.t/
p1� e� NVr
±, 8t > 0.
However, the initial error output requirement is more restrictive when QLF is employed. As theprevious output regulation design [6], we should replace Vblf with Qx21 and let
Vr D
rXjD1
Qx2j CU C b.w/�k � Nk
�2C b.w/k O‰ �‰�k2C
�Ob � b.w/
2.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

CONSTRAINT ADAPTIVE OUTPUT REGULATION OF OUTPUT FEEDBACK SYSTEMS
On the basis of the robust and adaptive backstepping control, it can be shown that the control law(9) is in the same form except that ˛1 D �k . Qx1/ Qx1 C O‰� and �1 D ��> Qx1. Also, it can beobtained that
PVr 6 � kNk2 � kN�k2 �rXjD1
Qx2j
from which we know that Vr.t/6 Vr.0/6 NVr , where NVr is the upper bound of Vr.0/ and is definedas follows
NVr D �max. QP .w// Nlk N.0/k2C �max.P / Nhk N�.0/k
2C 2bmax�k2.0/C Nk2
�C 2bmax
�k O‰.0/k2Ck‰�k2
C 2
�Ob2.0/C b2max
C
rXjD1
Qx2j .0/
DM0C
rXjD1
Qx2j .0/ (18)
with M0 D �max. NP .w// Nlk N.0/k2 C �max.P / Nhk N�.0/k
2 C 2bmax�k2.0/C Nk2
�C 2bmax�
k O‰.0/k2Ck‰�k2C2
�Ob2.0/C b2max
. Since j Qx1.t/j6
pNVr , a sufficient condition for j Qx1.t/j<
kb1.t/ ispNVr < kb1.t/. Noting kb1.t/6 kb1.0/, we can obtain NVr < k2b1.0/. By (18), we can obtain
the initial error output requirement for QLF-based output regulation design as
j Qx1.0/j<
vuutk2b1.0/�M0 �
rXjD2
Qx2j .0/. (19)
Because M0 CPrjD2 Qx
2j .0/ > 0, it is apparent that the initial error output requirement is
much more restrictive when employing QLF. Notice that the additional condition k2b1.0/ �M0 �Pr
jD2 Qx2j .0/ > 0 should be satisfied. Considering the fact that the control functions ˛i , i D 1, : : : , r ,
are associated withPrjD2 Qx
2j , we should carefully select the control parameters in ˛i . And even if
such a condition is satisfied, the allowed feasible initial conditions of error output are less relaxedthan those arising from using the BLF technique.
4.2. Range of control signal
By employing BLF, our proposed constraint adaptive output regulation design can guarantee theerror output to be within the given barrier kb1.t/. From the control law (9), it can be seen that the
component 1=�k2b1� Qx21
is the key to resist constraint transgression. Whenever j Qx1.t/j approaches
the constraint barrier kb1.t/, the aforementioned component will grow rapidly and generate a largecontrol action to repel Qx1.t/ from the barrier.
Unfortunately, as the term�k2b1� Qx21
becomes small, the control signal u.t/ may grow to a
large value leading to input saturation problem. However, we have theoretically established inTheorem 3.1 that the control signal is continuous and bounded. And we may limit the controlsignal within an acceptable operating range by carefully selecting the control parameters. In fact,from (17), we can first choose the optional parameters in NVr to make Qx1.t/ away from kb1.t/ asmuch as possible to relax the control effort. Also, we can see from (9) that u.t/ is dependent onx, k, kb1 , �, O‰, Ob. Thus, by selecting the parameters such as those optional ones in ˛i , i D 1, : : : , r ,we may limit the magnitude of the control signal in an acceptable range. Moreover, in some specialcases where the functions of controlled plant are bounded with known bounds [23], we can deter-mine the maximum magnitude of the control signal, based on which the control parameters can berigorously decided such that the control signal is within a desirable operating range. In summary,
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

W. SUN, J. LAN AND J. T. W. YEOW
it is a compromise between the transient performance and the available control signal u.t/ becausesmall control action will slow down the process of repelling Qx1.t/ from the desired barrier.
5. APPLICATION TO AN ELECTROSTATIC TORSIONAL MICROMIRROR
As an interesting application of the proposed method, consider the tracking control of anelectrostatic torsional micromirror [19]. The plant dynamics can be described by
I R CB P CK˛ D f .˛/V 2 (20)
where ˛ is the rotational angle of the micromirror, P is the rotational velocity, I is the moment ofinertia around the rotation axis, B is the damping coefficient,K is the stiffness of supporting hinges,and V is the actuation voltage. f .˛/ is a nonlinear function of ˛ defined by
f .˛/D"0b
2˛2
"1
1��N˛=˛max
� � 1
1� .�˛=˛max/C ln
˛max � N˛
˛max � �˛
!#(21)
where N D a2=a3 and � D a1=a3 are constants, b is the electrode width, "0 is the dielectricconstant of the surrounding medium, and ˛max D d=a3 is the maximum constrained tilting angle.The geometry parameters of micromirror d , a1, a2, a3 are defined in [19].
A well-known phenomenon in the electrostatic torsional micromirror is the pull-in position. It isa process by which the movable micromirror would crash abruptly into the fixed bottom electrodewhen it is rotated beyond a certain range. This phenomenon severely limits the stable operationalrange of electrostatically actuated micromirrors [19, 26]. Thus, various device designs have beendeveloped in order to extend the travel range of the micromirror. Some design approaches includemodifying the arrangement of the driving electrodes, changing the geometric configuration by stack-ing micromirrors [27], and adding sidewall electrodes [28]. Nevertheless, these approaches usuallyrequire significant changes to the fabrication process. And some control researchers begin to focuson using the control methods [19, 26, 29]. Besides the pull-in phenomenon, inconsistencies in thefabrication process may cause parameter variations [19] of moment inertia I , angular dampingcoefficient B , and angular stiffness K.
The purpose of our controller design is, in the presence of parameter variations, to ensure asinusoidal trajectory scanning of micromirror beyond the pull-in position. In particular, a guaranteedtransient requirement during the tracking is imposed. Its practical sense is to extend the operatingrange of micromirror as well to avoid surface damage contact and greatly increase the device life-times. The micromirror durability plays a major role in governing reliability and longevity of amicromirror-based imaging device. And the sinusoidal trajectory scanning with given frequency isimportant because it affects the imaging quality of targeted subtle tissue lesions [28].
To make the magnitude of the variables in the same order and avoid numerical problems duringsimulation, we change the time scale to � D
pK=I t . Denote y D ˛, x1 D P , and uD f .y/V 2=K
with f .�/ defined in (21). The tilting angle of the micromirror ˛ is easily obtained by an ON-TRAK position sensing detector, whereas the micromirror velocity P is not as easy to be measuredin practice [26]. In this respect, the sinusoidal trajectory scanning control problem for (20) can beformulated as
Px1 D�
rB2
KIx1 � y C u
Py D x1
Pv D A1.�/v
e D y �F.�/ (22)
where v D .v1, v2/>,A1.�/D
�0 �
�� 0
�for � 2 S D ¹� > 0º, andF.�/D v1 D Am sin.��C�/
with Am Dqv21.0/C v
22.0/ and � D arctan v1.0/
v2.0/is the tracking trajectory. By introducing the
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

CONSTRAINT ADAPTIVE OUTPUT REGULATION OF OUTPUT FEEDBACK SYSTEMS
following filter and coordinate transformation
P�1 D��1C u
´D x1 � �1 �
1�
rB2
KI
!y
we can formulate the control problem of system (22) as the following constraint adaptive outputregulation problem
P D �´�
2�
rB2
KI
!y
Py D
1�
rB2
KI
!y C ´C �1
P�1 D��1C u
Pv D A1.�/v
e D y � v1. (23)
Following the design procedure in Section 3, a specific controller for system (22) is shownas follows
uD �1C@˛1
@kb1
Pkb1 C@˛1
@kPkC O‰ P�� Qx1 � Qx2 �
@˛1
@ Qx1
�2Qx2C Ob
@˛1
@ Qx1
��1 � O‰�
CPO‰�
Pk D . Qx1/ Qx21
POb D�@˛1
@ Qx1Qx2
��1 � O‰�
P�1 D��1C u
P�DM�CN�1
PO‰ D��> Qx1
k2b1� Qx21
C@˛1
@ Qx1�> Qx2 (24)
where
. Qx1/D 1C1�
k2b1� Qx21
2˛1 D�k
�k2b1 � Qx
21
. Qx1/ Qx1C O‰�
kb1 D Le�ct C "
Qx1 D y � v1
Qx2 D �1 � ˛1.
Notice that our control law (24) is independent of the micromirror velocity P , which resultsfrom the formulation of the electrostatic torsional micromirror (20) as an output feedback sys-tem (22). This design philosophy avoids a separate velocity observer design, leading to a muchless involved controller structure. In controller (24), the dynamic k can produce a sufficiently highgain to dominate any bounded parameter uncertainty of the electrostatic torsional micromirror. Thisworks well in a noise-free or disturbance-free environment which is an ideal condition for the appli-cation of MEMS. However, in practice, there are noises or repeated disturbances, and the dynamicgain k may drift to infinity as its derivative is always non-negative. To tackle such a dilemma inpractical controller implementation, we can choose k to be some positive constant by an appropriateadjustment.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

W. SUN, J. LAN AND J. T. W. YEOW
0 0.5 1 1.5 2 2.5
−2
−1
0
0.5
1
1.5
2
0 0.04
2.1
2.2
2.3
2.4
Figure 2. Tracking performance of the micromirror.
0 0.5 1 1.5 2 2.5−0.2
−0.1
−0.05
0
0.05
0.1
Figure 3. Tracking error e.
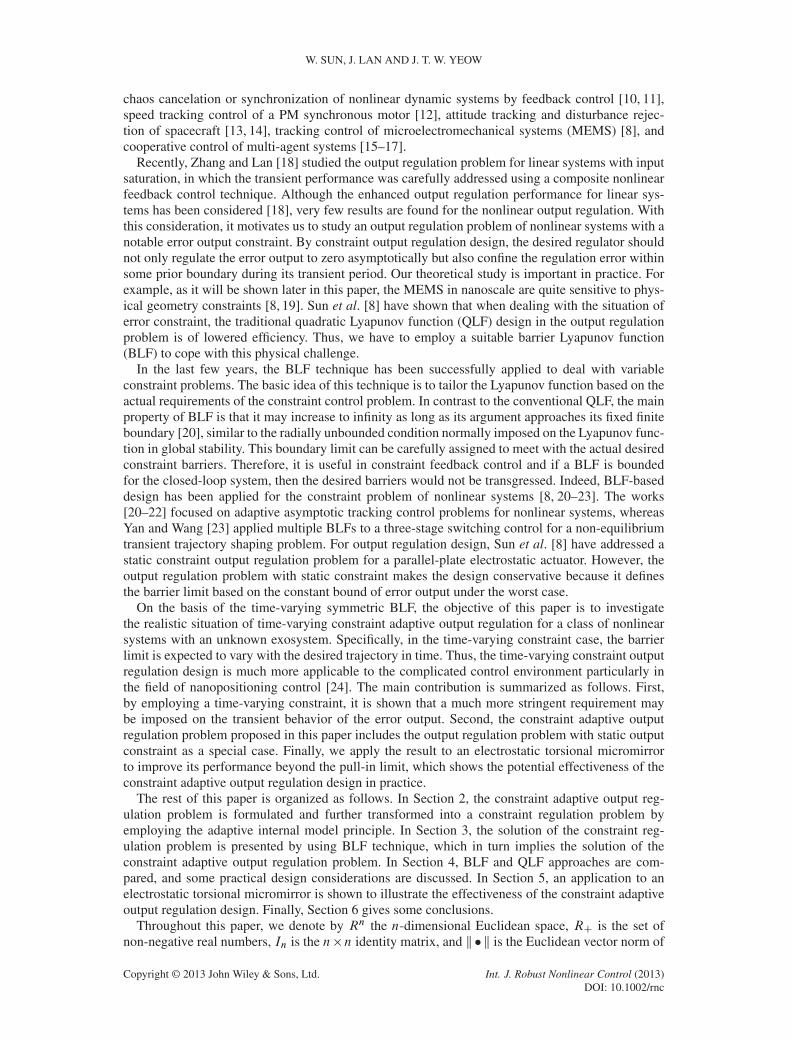
Figure 4. Output y and its constraint kc.t/.
The performance of the aforementioned constraint adaptive output regulation design is verifiedunder the micromirror parameters in [19], where the pull-in angle ˛pull�in is around 1.3ı
and the maximum tilting angle ˛max is 2.456ı. The scanning trajectory is chosen as F.t/ D2.292 sin
��t C �
2
�, from which we can choose v1.0/ D 2.292 and v2.0/ D 0. The error output
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

CONSTRAINT ADAPTIVE OUTPUT REGULATION OF OUTPUT FEEDBACK SYSTEMS
Figure 5. The estimated frequency � .
Figure 6. The estimation performance of changing frequency � .
constraint is kb1.t/ D Le�ct C " with L D 0.1554, c D 0.03, and " D 0.005. Consider tworepresentative initial outputs y.0/D 2.2 and y.0/D 2.4, which are denoted as init. cond. 1 and init.cond. 2, respectively. Other initial conditions are x1.0/ D 0, �.0/ D .0, 0/>, Ob.0/ D 0, k.0/ D 0,�1.0/D 0, and O‰.0/D Œ0.2 1.5�. The parameters are � D 0.3,M D Œ0 1I �0.5 �2� andN D Œ0I 1�.Thus, ‰� D Œ0.5� �2 2�.
For both initial conditions, we can see from Figure 2 that the output y.t/ converges to thedesired trajectory F.t/. From Figure 3, we can see that the tracking error e.t/ converges to 0 andsatisfies j˛.t/ � F.t/j < 0.1554e�0.03t C 0.005,8t > 0. In Figure 4, the profiles of thetilting angle ˛ and its constraint kc.t/ are shown, where the upper bound and lower bound ofkc.t/ are Nkc.t/ D F.t/ C kb1.t/ and kc.t/ D F.t/ � kb1.t/, respectively. A simple calcula-tion shows that the maximum value of Nkc.t/ is Nkc.t/max D 2.4524ı, and the minimum valueof kc.t/ is kc.t/min D �2.4524ı. This means that the controlled micromirror can achieve awider range of sinusoidal trajectory scanning beyond the pull-in angle. As a result, contactsbetween the fixed bottom electrodes and movable micromirror are avoided. Figure 5 shows thatthe estimated frequency of the unknown parameter � converges to its real value 0.3. Figure 6shows the estimation performance of � when there is a change from 0.3 to 0.5 at t D 2.7 ms.The simulation shows the satisfactory performance of the proposed constraint adaptive outputregulation design.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

W. SUN, J. LAN AND J. T. W. YEOW
6. CONCLUSION
In this paper, a control design has been proposed to achieve constraint adaptive output regulationfor a class of nonlinear systems with an unknown exosystem. We first transformed the probleminto a regulation problem with output constraint by applying the adaptive internal model principle.Then, we further incorporated the BLF technique to solve the problem which guaranteed the con-straint satisfaction. Our result has been applied to the tracking control of an electrostatic torsionalmicromirror with physical geometry constraint. It has been effectively demonstrated in widening thescanning range of electrostatically actuated micromirrors with enhanced transient performance. Theconstraint adaptive output regulation design technique has shown its huge potential in increasing thestroke length of MEMS actuators. Although we have only considered the constraint output regula-tion problem with unknown linear exosystems, such a design methodology can be further applied tothe case with nonlinear exosystems.
ACKNOWLEDGEMENT
This work is supported by the National Natural Science Foundation (NNSF) of China under Grant61004010 and partially supported by Guangdong Province Science and Technology Project under Grant2011B090400186.
REFERENCES
1. Francis BA, Wonham WM. The internal model principle of control theory. Automatica 1976; 12(5):457–465.2. Isidori A, Byrnes CI. Output regulation of nonlinear systems. IEEE Transactions on Automatic Control 1990;
35(2):131–140.3. Huang J. Nonlinear Output Regulation: Theory and Applications. SIAM: Philadelphia, 2004.4. Huang J, Chen Z. A general framework for tackling the output regulation problem. IEEE Transactions on Automatic
Control 2004; 49(12):2203–2218.5. Chen Z, Huang J. Dissipativity, stabilization, and regulation of cascade-connected systems. IEEE Transactions on
Automatic Control 2004; 49(5):635–650.6. Liu L, Chen Z, Huang J. Parameter convergence and minimal internal model with an adaptive output regulation
problem. Automatica 2009; 45(5):1306–1311.7. Sun W, Huang J, Sun Z. Global robust stabilization for a class of time-varying output feedback systems. International
Journal of Robotics and Automation 2011; 26(1):93–99.8. Sun W, Yeow JTW, Sun Z. Robust adaptive control of a one degree of freedom electrostatic microelectromechanical
systems model with output-error-constrained tracking. IET Control Theory and Applications 2012; 6(1):111–119.9. Yang X, Huang J. New results on robust output regulation of nonlinear systems with a nonlinear exosystem.
International Journal of Robust and Nonlinear Control 2012; 22(15):1703–1719.10. Sun W, Huang J. Output regulation for a class of nonlinear systems with nonlinear exosystem and its application.
Science in China, Series F: Information Sciences 2009; 52(11):2172–2179.11. Xu D, Huang J. Robust adaptive control of a class of nonlinear systems and its applications. IEEE Transactions on
Circuits and Systems-I: Regular Papers 2010; 57(11):691–702.12. Ping Z, Huang J. Speed tracking control of PM synchronous motor by internal model design. International Journal
of Control 2012; 85(5):522–532.13. Chen Z, Huang J. Attitude tracking and disturbance rejection of rigid spacecraft by adaptive control. IEEE
Transactions on Automatic Control 2009; 54(3):600–605.14. Chen Z, Huang J, Attitude tracking of rigid spacecraft subject to disturbances of unknown frequencies. International
Journal of Robust and Nonlinear Control 2013. DOI: 10.1002/rnc.2983.15. Su Y, Hong Y, Huang J. Cooperative output regulation of linear multi-agent systems. IEEE Transactions on
Automatic Control 2012; 57(4):1062–1066.16. Wang X, Hong Y, Huang J, Jiang Z. A distributed control approach to a robust output regulation problem for
multi-agent linear systems. IEEE Transactions on Automaic Control 2010; 55(12):2891–2895.17. Hong Y, Wang X, Jiang Z. Distributed output regulation of leader-follower multi-agent systems. International
Journal of Robust and Nonlinear Control 2013; 23(1):48–66.18. Zhang B, Lan W. Improving transient performance for output regulation problem of linear systems with input
saturation. International Journal of Robust and Nonlinear Control 2013; 23(10):1087–1098.19. Ma Y, Islam S, Pan Y. Electrostatic torsional micromirror with enhanced tilting angle using active control methods.
IEEE Transactions on Mechatronics 2011; 16(6):635–650.20. Tee TP, Ren B, Ge SS. Control of nonlinear systems with time-varying output constraints. Automatica 2011;
47(11):2511–2516.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc

CONSTRAINT ADAPTIVE OUTPUT REGULATION OF OUTPUT FEEDBACK SYSTEMS
21. Tee TP, Ge SS, Tay EH. Barrier Lyapunov Functions for the control of output-constrained nonlinear systems.Automatica 2009; 45(4):918–927.
22. Ren B, Ge SS, Tee TP, Lee TH. Adaptive neural control for output feedback nonlinear systems using a barrierLyapunov function. IEEE Transactions on Neural Networks 2010; 21(8):1339–1345.
23. Yan F, Wang J. Input constrained non-equilibrium transient trajectory shaping via a three-stage control method for aclass of non-linear systems. IET Control Theory and Applications 2012; 6(3):375–383.
24. Devasia S, Eleftheriou E, Moheimani SOR. A survey of control issues in nanopositioning. IEEE Transactions onControl Systems Technology 2007; 15(5):802–823.
25. Charalampos PB, George AR. Adaptive control with guaranteed transient and steady state tracking error bounds forstrict feedback systems. Automatica 2009; 45(2):532–538.
26. Agudelo CG, Packirisamy M, Zhu G, Saydy L. Nonlinear control of an electrostatic micromirror beyond pull-in withexperimental validation. Journal of Microelectromechanical Systems 2009; 18(4):914–923.
27. Park S, Chung SR, Yeow JTW. A design analysis of a micromirror in a stacked configuration with moving electrodes.International Journal on Smart Sensing and Intelligent Systems 2008; 1(2):480–497.
28. Bai Y, Yeow JTW, Wilson BC. Design, fabrication, and characteristics of a MEMS micromirror with sidewallelectrodes. Journal of Microelectromechincal System 2010; 19(3):619–631.
29. Chen H, Sun W, Sun Z, Yeow JTW. Second order sliding mode control of a 2D torsional MEMS micromirror withsidewall electrodes. Journal of Micromechanics and Microengineering 2013; 23(1):1–9.
Copyright © 2013 John Wiley & Sons, Ltd. Int. J. Robust Nonlinear Control (2013)DOI: 10.1002/rnc
Copyright © 2022 FDOKUMEN