
Coexistence in Metacommunities: A discrete time, finite patch approach
39
Coexistence in Metacommunities: A discrete time, finite patch approach Vanessa M. Adams 1 , Chris Wilcox 1,2 , Phil Pollett 3 , Hugh P. Possingham 1,3 1 The Ecology Centre, The University of Queensland, Brisbane 4072, Australia 2 CSIRO Marine and Atmospheric Research, Hobart 7001, Australia 3 Department of Mathematics, The University of Queensland, Brisbane 4072, Australia Keywords: Metacommunity, Quasi-stationary distributions, Extinction, Competition, Coexistence, Vernal Pool, Fairy Shrimp, Branchinecta lynchi, Linderiella occidentalis Correspondence: The Ecology Centre, The University of Queensland, Brisbane, Queensland, 4072, Australia. Tel: +61 (0)7 3365 2709, Fax: +61 (0)7 3365 1655, [email protected] Abstract: Metapopulation theory has emerged as a popular paradigm for studying the abundance and distribution of species in a fragmented landscape. A recent extension to metapopulation theory has been the development of metacommunity theory, which broadens the framework to incorporate the interacting dynamics of multiple species. Much of the work using a metacommunity framework has focused on determining the necessary conditions for species coexistence. Another fundamental but neglected question is the distribution of communities in a landscape and what factors drive occupancy patterns. We introduce a stochastic spatially implicit, discrete time, finite patch metacommunity model to examine expected distributions of multiple species given competition between species. We use the notion of quasi-stationarity to understand the probability distribution of different patch occupancy patterns prior to extinction. We find competition between species reduces the abundance of the lesser competitor. In addition, our novel application of quasi-stationary probability distributions elucidates the relative stability of the multiple species states and single species states. We contrast our model 1
Transcript of Coexistence in Metacommunities: A discrete time, finite patch approach

Coexistence in Metacommunities: A discrete time, finite patch approach Vanessa M. Adams1, Chris Wilcox1,2, Phil Pollett3, Hugh P. Possingham1,3
1The Ecology Centre, The University of Queensland, Brisbane 4072, Australia 2CSIRO Marine and Atmospheric Research, Hobart 7001, Australia 3Department of Mathematics, The University of Queensland, Brisbane 4072, Australia Keywords: Metacommunity, Quasi-stationary distributions, Extinction, Competition, Coexistence, Vernal Pool, Fairy Shrimp, Branchinecta lynchi, Linderiella occidentalis Correspondence: The Ecology Centre, The University of Queensland, Brisbane, Queensland, 4072, Australia. Tel: +61 (0)7 3365 2709, Fax: +61 (0)7 3365 1655, [email protected] Abstract:
Metapopulation theory has emerged as a popular paradigm for studying the abundance
and distribution of species in a fragmented landscape. A recent extension to
metapopulation theory has been the development of metacommunity theory, which
broadens the framework to incorporate the interacting dynamics of multiple species.
Much of the work using a metacommunity framework has focused on determining the
necessary conditions for species coexistence. Another fundamental but neglected
question is the distribution of communities in a landscape and what factors drive
occupancy patterns. We introduce a stochastic spatially implicit, discrete time, finite
patch metacommunity model to examine expected distributions of multiple species given
competition between species. We use the notion of quasi-stationarity to understand the
probability distribution of different patch occupancy patterns prior to extinction. We find
competition between species reduces the abundance of the lesser competitor. In addition,
our novel application of quasi-stationary probability distributions elucidates the relative
stability of the multiple species states and single species states. We contrast our model
1

with the more commonly used one-dimensional continuous-time competition models
which produce similar abundance predictions, but provide no information about the
stability of states or the variation about predicted averages. We illustrate the application
of our model by applying it to a system of vernal pool wetlands which support several
species of endangered crustaceans.
2

1. Introduction 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
The issue of how species coexist is a central question in community ecology. In short,
long-term coexistence of competitors using a single resource is almost impossible, and
life-history trade-offs are one of the primary mechanisms posited to allow co-existence of
competing species (Vance 1985). Much of community ecology has looked at local scale
phenomena, focusing coexistence predictions on limiting resources and trade-offs among
them (Chase and Leibold 2003). Recently, however, community ecology has shifted
focus from the local scale to examining trade-offs at broader scales (Kneitel and Chase
2004). Competition is traditionally characterized as either extinction competition, the
extinction of the lesser competitor, or migration competition, the migration of the lesser
competitor to alleviate competition (Levins and Culver 1971). In this context space is the
fundamental resource and trade-offs between dispersal and competitive ability can
mitigate competition and allow for coexistence.
A recent theoretical development that has allowed for a larger exploration of coexistence
is the metacommunity concept. A metacommunity is a set of communities, containing
potentially interacting species, occupying discrete patches linked by dispersal (Wilson
1992). Traditionally community theory has focused on a single scale, assuming that
communities were closed. Yet this approach fails to capture dynamic natural processes
such as dispersal and local extinction/colonization events which are likely to affect
coexistence.
3

23
24
25
26
Many metacommunity models (e.g. Shurin et al. 2004, Calcagno 2006, Yu 2001) use
extensions of the Levins and Culver (1971) model which may be summarized with two
simultaneous differential equations:
111111 )1( peppc
dtdp
−−= , 27
)1()1( 1201222222 ppeppeppc
dtdp
−−−−= , 28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
where ci is the per patch colonization rate of species i, and pi is the proportion of sites
inhabited by species i. For species 1 local extinctions occur at per patch rate e1and are
assumed to be independent of species 2. In contrast it is assumed that local extinctions of
species 2 are influenced by the presence of species 1 such that, e0 is the per patch local
extinction rate for species 2 when species 1 is absent and , e2 is the per patch local
extinction rate when species 1 is present. These models, using differential equations,
implicitly assume continuous time processes and an infinite number of patches in order to
make conclusions about when coexistence may occur, and what values of the species
parameters will affect coexistence conditions (e.g., Amarasekare and Nisbet 2001,
Klausmeier 2001). In this paper we construct an equivalent model for the
presence/absence of each species in a patch using a discrete time, finite patch Markov
chain framework (see Day and Possingham 1995 for a single species version of the
approach). The discrete time parallel does not require assuming an infinite number of
patches and also forces colonization and extinction events to occur at discrete time steps
rather than instantaneously.
4

45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
Much of the recent metacommunity work has been focused on extending the classical life
history trade-off framework, deducing which combinations of species parameters will
allow coexistence (Leibold et al. 2004, Yu et al. 2004, Yu 2001). However, the more
general question of the joint probability distributions of patch occupancy, which tells us
about the frequency and stability of various community types in a landscape, has been
relatively neglected. For instance, an important question that cannot be directly answered
by continuous time differential equation models is the effect of the number of available
patches in a landscape on the frequency of the potential community types. As landscapes
are becoming increasingly fragmented, and available habitat for species is decreasing, it
is important to be able to predict the effect of these changes on the distribution of species
in specific landscapes (Fahrig 1992). While continuous time differential equation models
cannot address these effects, a discrete time, finite patch model can as the number of
patches in a landscape can be directly manipulated.
In this paper we construct a stochastic discrete time, finite patch metacommunity model.
We develop summary measures of species and community distributions in the two
species case, and demonstrate how to extend this framework to an arbitrary number of
species. We apply our model to predict the persistence and community structure of two
species of crustaceans in a system of ephemeral wetlands in California, USA. These
wetland systems and their obligate fauna are of substantial conservation concern as the
majority of the habitat has been destroyed due to urban and agricultural development;
resulting in the listing of a number of the species under the US Endangered Species Act.
5

68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
We address the effects of interspecific interactions in this posited metacommunity system
by comparing results with and without competitive interactions. We compare the
predicted distributions from the model with different assumptions with the observed
distribution, and draw conclusions regarding the conditions that allow for coexistence in
this wetland system. Additionally, we examine the influence of the number of patches in
the system, on the expected distribution of community types. We compare our results to
the results obtained using differential equations. Using these results we discuss the
implications of the model for the persistence of these kinds of communities, which are
significantly threatened by human development.
2. Methods
In this section we first describe the Markov chain model for a single species, then we
expand the model to any number of species, focusing on two species. Next we show how
to use the discrete-time Markov chain to predict the state of the metacommunity at any
time into the future and find the quasi-stationary equilibrium for the metacommunity.
Finally we parameterize the model for the Californian fairy-shrimp system.
2.1 A single species metapopulation model
6
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
We first begin by describing how we model a single species. We based our model on the
single species, presence-absence, discrete time, finite patch models developed by
Akcakaya and Ginzburg (1991) and Day and Possingham (1995). We assume that the
species can occupy a finite number of patches, n. The state of the metapopulation is
defined at discrete time steps by the number of patches with the species in question
present alone. This is because every patch is assumed to be identical. Thus the state
space has size n+1. The time steps used here are annual, but could be any finite time.
We assume that in a given year, extinction is followed by colonization, and subsequently
the census of the system state. This separation of events has been promoted by authors of
metapopulation models as it allows patches to become unoccupied and then re-colonized
or rescued (see Akcakaya and Ginzburg 1991, Burgman et al. 1993, Day and Possingham
1995).
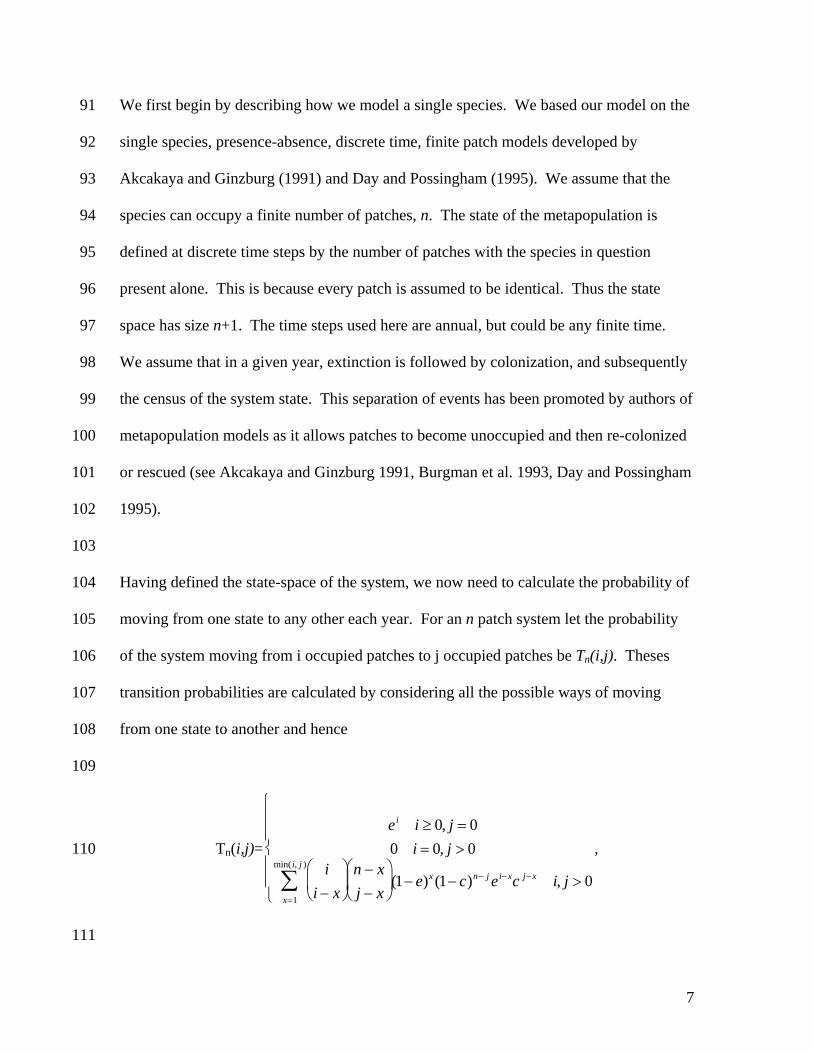
Having defined the state-space of the system, we now need to calculate the probability of
moving from one state to any other each year. For an n patch system let the probability
of the system moving from i occupied patches to j occupied patches be Tn(i,j). Theses
transition probabilities are calculated by considering all the possible ways of moving
from one state to another and hence
Tn(i,j)=ei i ≥ 0, j = 00 i = 0, j > 0
ii − x
⎛
⎝ ⎜
⎞
⎠ ⎟
n − xj − x
⎛
⎝ ⎜
⎞
⎠ ⎟
x=1
min( i, j )
∑ (1− e)x (1− c)n− j ei−xc j−x i, j > 0
⎧
⎨
⎪ ⎪
⎩
⎪ ⎪
, 110
111
7

where e is per patch local extinction probability and c is the probability per patch
probability any empty patch is colonized by an occupied patch. The transition
probabilities T
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
n(i,j) are conveniently stored in a matrix Tn.
2.2 Metacommunity model
We use this metapopulation model and extend it to a metacommunity model for two
species. The same approach can be used to extend the model to m species.
As with the one species model we assume there are n identical patches that may be
occupied at time t. The state of the system is described by the number of patches
occupied by each possible combination of species. For a system with two species
(species a and b) we have n0 + na + nb + nab = n, where n0 is the number of empty patches,
na is the number of patches occupied only by species a, nb is the number of patches
occupied only by species b, and nab is the number of patches occupied by both species a
and b. We will not keep explicit track of n0, because the number of completely empty
patches is simply the patches that are not in one of the other states. Thus our process may
take any one of the states in the set S = { }nnnnnn abba ≤++∈ :},...,1,0{ 3 . We note that S
has size |S| =
129
( )( )( 12361
33
+++=⎟⎟⎠
⎞⎜⎜⎝
⎛ +nnn
n )130
131
132
133
.
For a two patch, two species system there are ten possible states. Consider two possible
states in the full state space, Si , Sj ∈ S and let
8

134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
s=na + nab for (na, nb, nab) = Si
t=na + nab for (na, nb, nab) = Sj
and
u=nb + nab for (na, nb, nab) = Si
v=nb + nab for (na, nb, nab) = Sj
Then the probability of the system moving from Si to Sj is given by T2,n(Si , Sj)
T2,n(Si ,
Sj)= ⎪⎩
⎪⎨⎧
>−−−−
∈⋅
∑ ∑= =
−−−−−− 0,,,)1()1()1()1(
},,,{0),(),(),min(
1
),min(
1, vutscecececeC
vutsvuTtsTts
x
vu
y
xtb
xsb
tna
xa
yvb
yub
vnb
ybyx
ba
(See appendix 1 for description of how coefficient Cx,y is determined) where and
are the single species transition matrices for species a and b respectively when
there are n patches. Predation and competition can be included in this model by using
conditional probabilities for extinction and colonization of a species given the presence of
another species. Using similar logic it is possible, but messy, to construct a general
transition matrix for m species in n identical patches, T
),( tsTa
),( tsTb
m,n. The transition matrix Tm,n can
be used to explore the dynamics of our metacommunity – however for the remainder of
this paper we will consider a two species metacommunity only.
2.3 Model analysis
9

155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
In this section we describe methods used to analyze the discrete patch, finite time
metacommunity model. First we discuss the role of competition in long-term system
behavior. We then discuss the significance of the construction of the transition matrix
described above, and the how matrix math may be interpreted in the context of
metacommunity dynamics.
Given an initial metacommunity with a known number of patches in each of the four
possible combinations of which species are present (neither, species a, species b or both)
the metacommunity dynamics can be projected forward t time steps by raising the matrix
T2,n to the power of t. The initial state vector v(0), which will be a row vector with a
probability of 1 in one of the possible states and zeros in every other entry, may be
multiplied by (T2,n)t to give v(t). This gives the probability of being in any of the states in
S. To extract meaningful distributions from this vector we may sort and sum the
probabilities according to the number of patches where species a, species b, or both
species exist. For example if S1 is the set of all states with r patches containing both
species a and b we may find the probability of this state as
vu(t)u∈S1
∑ , where S1= u : nab = r{ }. 171
172
173
174
175
This gives us the fraction of sites occupied by species a, species b or both species a and b.
For the continuous case, if we assume that there are no interactions between species, the
expected equilibrium fraction (p) of patches occupied by a species not affected by
competition can be shown to be p1* =
c1
e1 + c 1
(similar to the incidence function described
by Hanski (1994)). Given coexistence, if competition affects the extinction probability,
176
177
10

the equilibrium fraction is p2* =
c2
c2 + e2 + eco p1* − e2 p1
* . We may use the expected fraction
to compare predicted number of patches occupied to observed number of patches
occupied. We will use this result to compare our discrete model to the continuous
differential equations model commonly used.
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
Quasi-Stationary Distributions
It is crucial to recognize that ecological systems are in a constant state of flux, but that
they may be described by an equilibrium distribution as they fluctuate through time
(Hastings 2003). In stochastic metapopulation models like this one, the only globally
stable state is extinction of both species. However, before that state is reached, the
system is very likely to occupy states according to a set of stable equilibria, the quasi-
stationary states. The quasi-stationary distribution is the average state of the system
conditioned on the species not having reached extinction. The rate of decay, or
movement out of this ‘averaged’ state towards extinction is given by the eigenvalue
associated with the quasi-stationary distribution (Darroch and Seneta 1965). The use of
quasi-stationarity has been applied to metapopulation theory to calculate the frequency of
patch occupancy in a landscape (e.g. Day and Possingham 1995, Pollett 1999). For a
community, interactions between species may effect the individual species distribution in
a landscape. In a system with multiple interacting species, as each species goes globally
extinct the system moves towards full extinction. Thus the stable distribution moves step
wise towards full extinction as different species leave the system. Therefore, there is not
a single quasi-stationary distribution, but rather a set of distributions, each corresponding
11

201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
to a different number of extant species, that will fully describe the systems stable
equilibrium.
Our metapopulation model may be described as a Markov chain with a single absorption
state, extinction. Thus, the matrix, T, may be truncated such that the column and row
vectors corresponding to extinction are removed giving us matrix R. For a reduced
metapopulation matrix, R, the left eigenvector, ν, corresponding to the dominant
eigenvalue, λ, gives us the quasi-stationary distribution (Darroch and Seneta, 1965,
Gilpin and Taylor 1994, Day and Possingham 1995). The metacommunity matrix can
likewise be truncated by removing the absorption state (extinction). For this matrix, R,
the set of left vectors corresponding to the dominant eigenvalue deserves further
investigation.
First let us examine the nature of R. When the states are grouped properly, such that sets
of states are grouped together, we obtain sub-matrices along the diagonal of R
corresponding to transitions between states of the system for which there are only species
A, only species B, or species A and B both present.
R=[A] [0] [0][0] [B] [0][...] [...] [AB]
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ 219
220
221
222
⎥ ⎥
The sets of states where just one species is present (A and B, described by the sub-
matrices [A] and [B]) are irreducible. Once in one of these sets of states we may move
12

within the set but cannot move to other sets in the system. In ecological terms this means
that once one of the species A or B becomes extinct in our system we may there after
only have a single species system. A system composed solely of species A may not
suddenly have both species A and B, or just B. We may consider these states to be
pseudo-absorption states. Once we are in a pseudo-absorption state we may not leave it;
rather our system can only move towards the absorption state of extinction. Each of our
pseudo-absorption sub-matrices has a set of eigenvalues {ρ
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
n} and corresponding left
eigenvectors {υn} which are contained in the set of eigenvalues {ρ} and left eigenvectors
{υ} associated with matrix R.
Now consider the sub-matrix corresponding to the coexistence state in which we have
both species A and species B in the system. The set of states in which both species are
present is irreducible, but it may also lead to our other sets of states. This means that
state AB may lead to the set A or set B but set A and set B may not lead to set AB. For
this irreducible sub-matrix the quasi-stationary distribution of the set is the left
eigenvector of the sub-matrix.
Thus, for our metacommunity transition matrix, we have a matrix with one absorption
state (extinction), two pseudo-absorption states (sets A and B) and state AB. The sets of
states A, B, and AB are irreducible. Because there is more than one state which is
irreducible, the metacommunity exhibits a series of quasi-stationary states. Rather, we
have quasi-stationary distributions corresponding to our single species sets, and to our
coexistence set. In particular, we may calculate the probability of being in the coexistence
13

state conditioned on non-absorption into our single species states. The long-term limits
of these conditional probabilities are analogous to the quasi-stationary distribution in a
single species metapopulation. The coexistence state must eventually enter either of our
single species (pseudo-absorption) states. Once absorbed into a single species set the
probability of being anywhere in the single species set may be calculated conditional on
not being absorbed (extinction). The long-term limits of these probabilities compose the
quasi-stationary distribution for this set. Thus, to understand the composition of the
system we must look at the different quasi-stationary distributions and the associated
eigenvalues to evaluate how stable these states are relative to one another. For a two
species example we would then have three dominant eigenvalues corresponding to the
single species states (A, B) and the coexistence state (AB): λ
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
a, λb, λab. The relative size of
these eigenvalues tells us how quickly the system moves out of these states.
Additionally, 1/ λ provides an estimate of the time it takes to leave the state, or how long
the system remains in state A, B, or AB.
The state-space of a two species metacommunity requires three dimensions, which is
difficult to visualize. We can collapse the state-space into the Euclidean x-y plane by
summing na + nab and nb + nab to give total number of species a and b in the system.
While we lose some detail in this state space, it is more visually appealing. The axes
represent the pseudo-absorption states: when only one species is present (essentially the
metapopulation state space). All points in the interior of the x-y plane are points where
both species are present but not necessarily coexisting. The probability of being at any
point in the x-y plane is then the sum of all rows in the quasi-stationary distribution
14

corresponding to (na + nab, nb + nab). For any point (x,y) in our statespace, we may
examine the probability of species coexisting by creating a vector corresponding to all
states such that n
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
a + nab=x and nb + nab=y. The normalized vector then gives us the
relative probabilities of a,b being in the same patches for nab={0,…,min(na + nab, nb +
nab)}.
2.4 Vernal Pool Crustaceans: An Application
The vernal pool fairy shrimp (Branchiopoda: Anostraca, Branchinecta lynchi), a
federally threatened species, and the California linderiella (Linderiella occidentalis),
previously proposed for listing under the Endangered Species Act, inhabit seasonal
wetlands throughout the Central Valley of California (Eng et al. 1990). The seasonal
wetlands, or vernal pools, that the shrimp occupy are typical of Mediterranean climates,
with a summer dry phase and a winter wet phase. These habitats are separated by
uplands, giving them a patch and matrix structure typical of metapopulation systems.
Based on surveys, as detailed below, the species appear to have substantial turnover,
suggesting that they may have the colonization and extinction dynamics suggestive of
metapopulation dynamics. Moreover, based on preliminary experimental results the two
shrimp appear to have competitive interactions (Wilcox, unpublished data). Utilizing the
metacommunity framework to model this system allows us to capture those processes
which appear to be most important: competition between species, along with dispersal
and extinction/colonization events.
15

292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
A discrete time stochastic model is a realistic framework for this particular system as the
vernal pools are seasonal, and thus the life cycle of the shrimp is annual, driven by
California’s Mediterranean climate. We include competition through conditional
colonization/extinction rates, parameterized as described below. We assume that all
patches are identical and equally related to each other in terms of colonization. We also
assume that local extinctions are independent events. Relaxing these assumptions is
mathematically possible, however the size of system state space may make numerical
work on systems with large number of patches intractable.
Species distribution data for these two species was collected from the vernal pools at the
1,575 hectare West Bear Creek Unit (WBC) of the San Luis National Wildlife Refuge,
Merced Co., California. All vernal pools (~122) were surveyed for macroinvertebrates
biweekly during the winters of 1997-1998 (5 surveys), 1998-1999 (8 surveys), and 1999-
2000 (4 surveys), beginning two weeks after the pools held water. Each pool was
sampled in a minimum of 3 random locations, with the constraint that the samples
covered the range of water depths in the pool. Samples were taken using 1.5 mm mesh
size handnets, varying in aperture from 25 x 47 cm to 10 x 20 cm. Nets were swept
through the water column horizontally in contact with the sediment for distances from 25
cm to 5.5 m, depending on pool size. Approximately 7% of the pool volume was
sampled. Branchiopod crustaceans were identified and counted in each sample.
Annual presence/absence data was calculated by aggregating data within each year. We
then used these annual values to estimate the frequency of changes in presence-absence
16

315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
status, which we take as a proxy for extinction and colonization probabilities. While the
presence of dormant cysts makes estimation of colonization and extinction rates difficult,
the inaccuracies in estimated rates are predictable based on pool characteristics and
environmental conditions (Phillippi et al. 2004). The pools at the WBC site are relatively
similar in hydroperiod (Wilcox unpublished data), thus we expect that the observed
turnover rates are proportional to the actual rates (Phillippi et al. 2004), with relatively
little bias across pools due to differential selection for dormancy. Based on the raw
occupancy data, both species were widespread across the habitat and had substantial
turnover in occupancy (Figure 1a). B. lynchi (B) had a higher rate of turnover than L.
occidentalis (L) (Figure 1b).
We created our metacommunity matrix using the extinction and colonization variables
calculated based on the field data (Table 1). We estimated conditional extinction values
such that the extinction rate for species L increases when species B is present to reflect
the observed interactions between L and B (Wilcox unpublished data). We created a
metacommunity matrix in which no competition was included using the base extinction
and colonization variables, and one in which competition was included using the
conditional extinction values. The rows and columns of the transition matrix, T2,n, were
arranged such that when the absorption state was removed T2,n had the structure of R as
described in section 2.3. We calculated the stable distributions for the three state sets
(single species B, single species L, both B and L present) by finding the dominant
eigenvalue and corresponding left eigenvector for each of the sub-matrices. We repeated
17

this process for n=3, 5, 7 and 9 and compared the eigenvalues λB, λL, λBL for the different
systems (Table 4).
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
For the nine-patch system (n=9) we normalized the single species eigenvectors and each
probability corresponds directly to one of the nine possible states (0-9 patches occupied).
Points on the corresponding axis were plotted with size proportional to the probability in
the stable distribution. For both species present we reduced the state space to the x-y
plane as discussed in section 2.3, thus there were 81 possible states (nm where n is
number patches and m is number of species). The probability of being in any one of
these states is the sum of the rows of the quasi-stationary distribution corresponding to
the state. This probability distribution was calculated from the stable distribution and
plotted in the x-y plane with point size proportional to probability. Plots were created for
the metacommunity with no competition (Figure 2) and with competition (Figure 3). We
will denote the state of each point as we would a point on the X,Y plane: (B,L) being the
number of patches occupied by B and the number of patches occupied by L. For those
states with the greatest probability ((4,3), (4,4) (4,5), (5,3) (5,4), (5,5)) we determined the
probability of B and L being in the same patch by sorting the rows in the quasi-stationary
distribution corresponding to these states and plotting the normalized probabilities for
total possible number of BL (Figure 4). We used the quasi-stationary distributions of the
three states (B, L, and BL) to calculate the predicted percent composition of the system.
We did this for the model with and without competition. We compared our discrete time
model results with those of the continuous time model described in section 2.3, and with
the actual percent composition observed at the study site (Tables 2 and 3).
18

360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
3. Results
When no competition was included in the metacommunity matrix the expected
metacommunity states are within the distributions of the two species (Figure 2a). The
probability distribution for the metacommunity falls within the probability distribution of
the independent species as would be expected, with the highest probabilities being (4,5),
(4,4), and (5,5) (probabilities 0.0693, 0.0607, 0.0601 respectively). When competition is
included in the metacommunity model the probability distribution for the
metacommunity remains the same for B, but is shifted downward (fewer patches
occupied) for L (Figure 2b). When the species compete, the most likely states are (4,4),
(5,4) and (4,3) (with probabilities 0.0725, 0.0628, 0.0613 respectively). The difference in
probabilities for the model with competition and without competition is shown in Figure
3.
The highest probability for coexistence (for the states (4,4), (4,5), (5,3) and (5,4)) is 2
patches (Figure 4). For the state (4,3) one patch containing both B and L has the highest
probability. For the state (5,5) the highest probability is for 3 patches coexisting. The
shape and center of the curves remain similar but are shifted by the presence of
competition (Figure 4).
19

382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
Based on our metacommunity model, with competition incorporated, we would expect
the percent composition of the site to be 0.44 B (or 4 patches) and 0.44 L (or 4 patches).
We expect 1-2 of those patches to be co-occupied (or 0.16BL total in the system). The
observed composition of the site is given in Table 2. The predicted composition of the
site based on our models and differential equation models is given in Table 3. The
observed composition of the site is most closely predicted by our model with
competition.
To compare the relative stability of the states, B, L, and BL, we compare the dominant
eigenvalues. For all values of n λL is greater than λB which is greater than λBL. When the
number of patches is reduced λBL decreases at a much faster rate than λB and λL with λL
decreasing the slowest, and remaining larger than λB and λBL for all numbers of patches
(Table 4). The proportion of patches inhabited increases as number of patches in the
system decreases for both B and L. For a nine patch system the proportion patches
occupied for B is 0.44-0.55 and L is 0.33-0.44. For a three patch system proportion
patches occupied by both B and L is 0.66.
4. Discussion
The distribution of species is a central subject in theoretical and applied ecology.
Metapopulation theory allowed the advancement of prediction and understanding of the
distribution of a single species in a landscape (Hanski and Simberloff 1997).
Metacommunity theory allows us to extend this understanding by incorporating species
20

405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
interactions (e.g. Roy 2004, Yu et al. 2004). The metacommunity concept thus extends
the metapopulation framework by more accurately describing the important ecological
processes that influence species distributions, such as competition and dispersal. Our
model specifically extends a discrete time, finite patch metapopulation framework to a
metacommunity framework. This allows for species interactions through conditional
probabilities of colonization and extinction given the presence of other species.
Our model demonstrates how competition effects the expected distribution of species.
When there is no competition, the expected distribution of a two species system is simply
the combined distributions of the two independent species’ distributions (Figure 2a).
Competition shifts the distribution of a two species system by decreasing the expected
number of patches occupied by the species which is negatively effected by the
competitive interaction (Figure 2b). Thus, in our system the expected distribution of the
two species system is shifted such that the probability distribution of L. occidentalis is
centered around a smaller proportion of patches occupied. The effect of competition is
displayed as a plot of the differences in probability for each state (Figure 3). This
demonstrates how competition shifts the distribution of L but not B. The model has
higher probability for states of 5 patches or more occupied by L. occidentalis when
competition is absent, while states with less than 5 occupied patches are more likely with
competition. This quantitatively shows the distribution shift when competition is
present. This result is in line with community ecology theory that the presence of a
better competitor decreases the likelihood of co-occurrence (Levins and Culver 1971).
21

Our model demonstrates that coexistence in the system is possible both regionally and
locally. This result is supported by the results of analogous continuous time models
which show that coexistence is still possible so long as the stronger competitor is below
an exclusion threshold abundance (Levins and Culver 1971). We expect coexistence as
the weaker competitor (L) has other life history traits that compensate (c
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
L/eL> cB/eB, e.g.
Nee and May 1992, Yu et al. 2004). The effects of competition on coexistence can be
seen in the shift of the distribution of number of patches co-occupied (Figure 4). The
center of the distributions, and the shape of the distributions are the same for competition
and no competition (Figure 4). Competition causes the probabilities below the median
(fewer BL) to be higher than those without competition, and the probabilities above the
median (more BL) to be lower than those without competition.
While coexistence occurs both locally and regionally in our model, we highlight that
coexistence in the landscape may be transient. The eigenvalue associated with the quasi-
stationary distribution for the coexistence state tells us how quickly the system is moving
out of this equilibrium and towards extinction (in this case via a single species system).
The proportion of sites occupied increases as number of patches decreases for both
species. This phenomenon is noted in a single species metapopulation by Hill and
Caswell (2001). This phenomenon can be attributed to the fact that the quasi-stationary
distribution is a measure of the proportion of patches occupied conditioned on the species
not having gone extinct. Thus, for systems with low numbers of patches, systems with
few occupied patches quickly go to extinction. For example in a one patch system we
must have both species present in that patch in order to not have the system extinct. Yet,
22
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
as we reduce the number of patches in the system, the eigenvalue associated with
coexistence in the two species system decreases at a much more rapid rate than the
eigenvalues for the single species states. Thus, while the proportion of sites occupied in a
3 patch system is higher than a 9 patch system, the eigenvalue is 0.619 compared to 0.919
for the 9 patch system. This indicates that for systems with fewer patches the two species
state is rapidly moving toward extinction. Thus, while coexistence may occur in our
system, we must recognize that this state may be quite transient.
Our metacommunity model is a novel approach to modeling multiple species in a
metapopulation framework. The incorporation of competition into our model has a very
clear effect on the expected fraction of patches occupied by our two species
metacommunity. The eigenvalues associated with the single species and two species
systems elucidate how the system composition may change through time, as well as with
number of patches. This mathematical exploration of the relative stability of the different
states of the system is a new application of quasi-stationary distributions. Quasi-
stationary distributions are a useful mathematical tool that has been relatively neglected
in ecological modeling (but see Day and Possingham 1995, Pollett 2001, Wilcox et al.
2006). As Hastings (2004) recently pointed out, transient dynamics probably drive most
ecological systems. All ecological communities are moving towards extinction, the key
is to capture the systems behavior before it reaches extinction.
Current mathematical approaches often focus on time to extinction. Yet, for many
systems, this value is very large. It is thus more relevant and important to ask what the
23
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
current state of the system is, and the stability of that state. Quasi-stationary distributions
and their associated decay rates provide us with this information. The need for a better
understanding of these dynamics prior to extinction has been recognized in
metapopulation theory both as fundamental to furthering ecological theory (Hanski,
2001) and for improved conservation and management of natural populations (Caughley
and Sinclair 1994). In our model the set of quasi-stationary distributions can tell us about
the long-term behavior of our system for the various possible states. When multiple
species are present a system will move towards full extinction in a stepwise fashion with
single species leaving the system (going extinct). Thus the long-term behavior of a two
species system may be described by the quasi-stationary distribution for the set of states
in which both species are present. This system, will however, move towards a single
species system over time. The method we present can also be used to test alternative
hypothesis regarding mechanisms structuring communities, as in our comparison of
predictions with and without the presence of interspecific competition.
While our model is simple, in that it does not account for patch quality or placement, it
captures the behavior of our system, accurately predicting the distribution of occupied
sites. However, the model can be extended to incorporate extinction and colonization
rates affected by the area of the patch and distance between patches following the
methods described by Day and Possingham (1995).
Metacommunity theory has focused on answering complex questions such as how
landscape heterogeneity effects local and regional composition of communities. The
24

497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
basic distribution of populations in a landscape has been a focus of metapopulation
theory, but metacommunity theory has not experienced an analogous focus. Our
metacommunity model represents a simple framework to investigate this question for
communities. We examine the effects of reducing the number of patches in a landscape,
and show that this decreases the stability of the coexistence state, thus decreasing the
incidence of coexistence. The relative stability of all states conditional on not being
extinct significantly decreases as the number of patches decreases. This direct
examination of the effects of the number of patches in a landscape cannot be done using
continuous time differential equation models. Our mathematical methods represent a
novel and useful approach to modeling metacommunities that allows for analyses that
cannot be derived from continuous time differential equations. We argue that the use of
quasi-stationarity is an insightful mathematical approach that should be used in
ecological mathematics more regularly.
25

Appendix 513
514
515
516
517
518
519
520
Let E be the set of all possible extinction combinations. Let e ∈ E such that e=(mab⏐a,b,
mab⏐a, mab⏐b, ma⏐a, mb⏐b) where m is the number of patches in a specific state (ab, a, or
b) lost by extinction and ⏐indicates what combination of species went extinct from the
patches (a,b being both a and b, and a, or b being just a or b going extinct). For e ∈ E the
combination of ways e may happen is given by
ecoeff=nab
mab a ,b
⎛
⎝ ⎜
⎞
⎠ ⎟
nab − mab a ,b
mab a
⎛
⎝ ⎜
⎞
⎠ ⎟
nab − mab a,b −mab a
mab b
⎛
⎝ ⎜
⎞
⎠ ⎟
na
ma
⎛
⎝ ⎜
⎞
⎠ ⎟
nb
mb
⎛
⎝ ⎜
⎞
⎠ ⎟ . For every e ∈ E there are a
specific set of combinations in which colonization can occur to reach S
521
522
523
524
525
526
527
j. We notate the
set, C⏐e such that c ∈ C is given by c=(mab⏐a,b, mab⏐a, mab⏐b, ma⏐a, mb⏐b) where m is
the number of patches colonized such that a specific state (ab, a, or b) is reached by the
patch and ⏐ indicates which combination of species colonized the patch (a,b being both a
and b, and a, or b being just a or b colonizing). For c ∈ C⏐e the combination of ways c
may happen is given by
ccoeff=k0
mab a ,b
⎛
⎝ ⎜
⎞
⎠ ⎟
kb
mab a
⎛
⎝ ⎜
⎞
⎠ ⎟
ka
mab b
⎛
⎝ ⎜
⎞
⎠ ⎟
k0 − mab a,b
ma
⎛
⎝ ⎜
⎞
⎠ ⎟
k0 − mab a,b −ma
mb
⎛
⎝ ⎜
⎞
⎠ ⎟ , where K=(ka,kb,kab) is the
intermediate state after extinctions have occurred and k
528
529
530
531
0 is the number of empty patches
in the intermediate state.
Now, let E be the size of E and ej ∈ E. The total coefficient Cx,y is then given by 532
26

Cx,y= e j,coeff ccoeffC∑
⎛
⎝ ⎜
⎞
⎠ ⎟
27
j=1
E
∑533 .
28
References
Akcakaya, H. R., and L. R. Ginzburg. 1991. Ecological risk analysis for single and
multiple populations. Pages 78-87 in A. Seitz and V. Loescheke, editors. Species
Conservation: A population biological approach. Birkhauser, Basel.
Amarasekare, P., and R. M. Nisbet. 2001. Spatial Heterogeneity, source-sink dynamics,
and the local coexistence of competing species. The American Naturalist 158:572-584.
Burgman, M. A., S. Ferson, and H. R. Akcakaya. 1993. Risk Assessment in Conservation
Biology. Chapman & Hall, London, UK.
Calcagno V., N. Mouquet, P. Jarne, and P. David. 2006. Coexistence in a
metacommunity: the competition-colonization trade-off is not dead. Ecology Letters 9(8):
897-907.
Caughley, G., and A. R. E. Sinclair. 1994. Wildlife Ecology and Management. Blackwell,
Boston, Massachusetts, USA.
Chase, J.M. and M.A. Leibold. 2003. Ecological niches. University of Chicago Press,
Chicago, Illinois, USA.
Darroch, J. N., and E. Seneta. 1965. On quasi-stationary distributions in absorbing
discrete-time finite Markov chains. Journal of Applied Probability 2:88-100.

29
Day, J. R., and H. P. Possingham. 1995. A stochastic metapopulation model with
variability in patch size and position. Theoretical Population Biology 48:333-360.
Fahrig, L. and G. Merriam. 1992. Conservation of Fragmented Populations. Conservation
Biology 8 (1): 50-59.
Gilpin, M. 1992. Demographic stochasticity: A Markovian approach. Journal of
Theoretical Biology 154:1-8.
Gilpin, M., and B. L. Taylor. 1994. Reduced dimensional population transition matrices:
extinction distributions from Markovian dynamics. Theoretical Population Biology
46:121-130.
Hanski, I. A. 1994. A practical model of metapopulation dynamics. Journal of Animal
Ecology 63:151-162.
Hanski, I. A., and D. Simberloff. 1997. The metapopulation approach, its history,
conceptual domain and application to conservation. Pages 5-26 in I. A. Hanski and M. E.
Gilpin, editors. Metapopulation biology. Academic Press, London, UK.
Hanski, I. A. 2001. Spatially realistic theory of metapopulation ecology.
Naturwissenschaften 88:372-381.

30
Hastings, A. 2003. Metapopulation Persistence with Age-Dependent Disturbance or
Succession. Science 301: 1525 – 1526.
Hastings, A. 2004. Transients: the key to long term ecological understanding? TRENDS
in Ecology and Evoloution 19:39-45.
Hill, M.F. and H. Caswell. 2001. The effects of habitat destruction in finite landscapes: a
chain-binomial metapopulation model. OIKOS 93: 321-331.
Klausmeier, C. A. 2001. Habitat destruction and extinction in competitive and mutualistic
metacommunities. Ecology Letters 4:57-63.
Kneitel, J. M., and J. M. Chase. 2004. Trade-offs in community ecology: linking spatial
scales and species coexistence. Ecology Letters 7:69-80.
Leibold, M. A., M. Holyoak, N. Moquet, P. Amarasekare, J. M. Chase, M. F. Hoopes, R.
D. Holt, J. B. Shurin, R. Law, D. Tilman, M. Loreau, and A. Gonzalez. 2004. The
metacommunity concept: a framework for multi-scale community ecology. Ecology
Letters 7:601-613.
Levins, R., and D. Culver. 1971. Regional Coexistence of Species and Competition
between Rare species. Proceedings of the National Academy of Science, U.S.A. 68:1246-
1248.

31
Nee, S. and R.M. May. 1992. Dynamics of metapopulations: habitat destruction and
competitive coexistence. Journal of Animal Ecology 61: 37-40.
Pollett, P. K. 1999. Modeling quasi-stationary behavior in metapopulations. Mathematics
and Computers in Simulation 48:393-405.
Pollett, P. K. 2001. Quasi-stationarity in populations that are subject to large-scale
mortality or emigration. Environmental International 27:231-236.
Roy M., M. Pascual and S.A. Levin. 2004. Competitive coexistence in a dynamic
landscape. Theoretical Population Biology 66 (4): 341-353.
Shurin, J.B., P. Amarasekare, J.M. Chase, R.D. Holt, M.F. Hoopes, M.A. Leibold. 2004.
Alternative stable states and regional community structure. Journal of Theoretical
Biology, 227(3): 359-368.
Wilcox, C., B. Cairns, and H.P. Possingham. 2006. The role of habitat disturbance and
recovery in metapopulation persistence. Ecology 87:855-863.
Wilson, D. S. 1992. Complex interactions in metacommunities, with implications for
biodiversity and higher levels of selection. Ecology 73:1984-2000.
Yu D.W. and H.B. Wilson. 2001. The competition-colonization trade-off is dead; Long
live the competition-colonization trade-off. American Naturalist 158 (1): 49-63.

32
Yu D.W., H.B. Wilson, M.E. Frederickson W. Palominos, R. De La Colina, D.P Edwards
and A.A. Balareso. 2004. Experimental demonstration of species coexistence enabled by
dispersal limitation. Journal of animal ecology 73 (6): 1102-1114 .

33
Table 1. Extinction and Colonization values used.
Extinction
Probability (e)
Colonization
Probability (c)
Conditional Extinction
Probability (e|coexistence)
Branchinecta lynchi (B) 0.37 0.24 0.37
Linderiella occidentalis (L) 0.22 0.20 0.47
Table 2. Observed percent composition of sites in the field.
Percent of site in state
Empty 0.25
B 0.31
BL 0.17
L 0.28
Table 3. Predicted percent composition of sites in the field based on our model and
differential equation models solved at equilibrium.
Model
prediction
without
competition
Model
prediction with
competition
DE prediction
without
competition
DE prediction
with
competition
Empty 0.23 .28 0.32 0.38
B 0.22 .28 0.20 0.24
BL 0.22 .16 0.19 0.15
L 0.33 .28 0.29 0.23

34
Table 4. Values for the decay rate at which the system moves out of the quasi-stationary
state (λ), associated with different states (single species, B and L, and both species
present, BL) for a competitive metacommunity with varying numbers of patches
(3,5,7,9).
λL
λB
λBL
3 0.908 0.795 0.619
5 0.962 0.884 0.780
7 0.984 0.936 0.874
9 0.994 0.965 0.919

Figure 1. Relative turnover rates of Branchinecta lynchi and Linderiella occidentalis in
terms of A) presence/absence data and number of colonization/extinction events
observed. and B) comparison of colonization/extinction events observed in year 1 (1998)
and year 2 (1999).
A)
0
20
40
60
80
100
120
140
Bly Lo
Num
ber o
f obs
erva
tions
colonizationextinctionpresentabsent
B)
0
5
10
15
20
25
30
1998 1999
Bly ColonizationsBly ExtinctionsLo ColonizationsLo Extinctions
35

Figure 2. Stable Distributions of state classes in the metacommunity system with no
competition between species. Point size is weighted by probability of being in that state.
The x-axis and y-axis show the stable distributions for the pseudo-absorption, single
species states. The x-y plane shows the quasi-stationary distribution for a two species
system a) with no competition b) with competition.
a)
36

b)
37

Figure 3. Difference in probability of a particular state in a metacommunity with no
competition and a metacommunity with competition. Point size is proportional to the
difference. For differences in which the probability was greater for no competition, the
point is filled in. For difference in which the probability was greater for competition
present, the point is left open.
38

Figure 4. The distribution of the number of patches in which B and L coexist for a
metacommunity system with B=4,5 and L=3, 4, 5.
B=4, L=3 B=4, L=4 B=4, L=5
B=5, L=3 B=5, L=4 B=5, L=5
39




















