Boundary conditions for technological disruption
35
1 Exploring the boundary conditions of disruption: Large firms and new product introduction with a potentially disruptive technology in the Industrial Robotics industry Raja Roy Assistant Professor of Management and Entrepreneurship LeBow College of Business Drexel University E-mail: [email protected] Accepted for publication at IEEE Transactions on Engineering Management
Transcript of Boundary conditions for technological disruption

1
Exploring the boundary conditions of disruption: Large firms and new product
introduction with a potentially disruptive technology in the Industrial Robotics industry
Raja Roy
Assistant Professor of Management and Entrepreneurship
LeBow College of Business
Drexel University
E-mail: [email protected]
Accepted for publication at
IEEE Transactions on Engineering Management

2
Abstract
We explore the boundary conditions of Christensen’s theory. Using technological
changes that were potentially disruptive to the manufacturers of industrial robots as the context,
we find that, unlike Christensen’s suggestions, large hydraulic robot manufacturers introduced
new products with the disruptive technology fairly early during the changes. By comparing the
robotics industry with the disk-drive industry, we extend Christensen’s theory by expanding the
boundary conditions of the theory.
Keywords/phrases: Disruptive technological change; Competence-destroying technological
change; Component and architectural capability
Managerial relevance statement:
This paper suggests that managers need to be cautious while responding to disruptive
technological changes. While extant research suggests that firms whose internal systems and
processes are consistent with those required to respond to technological disruption, can respond
to disruptive changes, our paper highlights that pre-existing capabilities can explain which firms
are more likely to respond to disruptive changes. Since disruptive technological changes are
becoming more prevalent, managers need to strategically build up capabilities in various
technological fields so as to avoid the pitfalls of disruptive technological changes.

3
Exploring the boundary conditions of disruption: Large firms and new product
introduction with a potentially disruptive technology in the Industrial Robotics industry
Christensen’s [1] research on technological disruption has had profound effects on the
technological change literature. By suggesting that technologies, that are initially inferior, can
eventually displace mainstream technologies and challenge existing large firms, Christensen
shed new lights on how managers and scholars approach technological evolution and
competition. Subsequent research by Adner [2], Danneels [3], Christensen [4] and others, has
expanded our understanding of when a technological change is potentially disruptive for a large
firm, where a potentially disruptive change is one in which large manufacturers like RCA or
DEC face “innovator’s dilemma” because their value systems and processes lead them to
deliberately ignore the threat [5]. Theory predicts that large firms either do not to respond to the
threat (i.e., do not introduce new products with the new technology) or, are late in introducing
the new products.1
Literature (see e.g., [7]) provides several evidences of exceptions to the phenomenon of
disruptive technological change (henceforth referred to as “disruption”). These exceptions raise
yet unanswered questions, such as, “if the processes and value systems of large firms, such as
DEC [1], prevent them from introducing new products, then how does one explain Sony’s
decision to introduce successive generations of new products with new technologies, including
1 See e.g., [6; p.43], “Apple Computer……lagged five years behind the leaders in bringing its
portable computer to the market” and [6; p.44], “these same companies are rarely in the forefront
of commercializing new technologies that don’t initially meet the needs of mainstream customers
and appeal only to small or emerging markets.”

4
some potentially disruptive ones, such as, the advent of the LCD TV?” and “if RCA faced
innovator’s dilemma due to their processes and value systems [5], how did a large manufacturer
like Mergenthaler Linotype [9] overcome those inertia during potentially disruptive changes?”
These unanswered questions prompt us to investigate if the boundary conditions for disruption,
i.e., the reasons for large firms not introducing new products during potentially disruptive
changes are more nuanced that what the literature suggests. In other words, the question “under
what conditions does a large firm responds to the potentially disruptive change by introducing
new products with the new technology?” begs an answer if we are to have a rich theoretical
understanding of the boundary conditions of the theory [8].
To address this gap in the literature, we build on research that has investigated the role of
firms’ capabilities [e.g., 9]. The link between pre-existing capabilities of firms, especially the
related ones that firms can utilize to introduce new products during a potentially disruptive
threat, can be critical for firm performance during disruption. Although, [6; p.48] observed that
the lack of technological capability was not the cause of disruption (“Engineers at Seagate were
the second in the industry to develop working prototypes of 3.5-inch drives.”), Christensen later
[4; p.51] alluded to the role of technological capabilities in disruption when he observed that
some potentially disruptive innovations may be “unattainable to the incumbent leaders, because
the technology or capital requirements are simply beyond the reach of the incumbent leaders.”
Thus, an investigation of the technological capabilities of large firms might help researchers
develop a nuanced understanding of why some large firms introduce new products with the
potentially disruptive technology and others either do not introduce such products or are late in
doing so.

5
To seek the answer to our research question, we concentrated on the industrial robotics
industry from the early-1970s to mid-1990s. The pioneers of industrial robots manufactured
robots with hydraulic actuators. These manufacturers were challenged in the 1980s by robots
made with electrical actuators. While robots made with the two types of actuators were not
substitutes, i.e., these products targeted two different product markets with two different “critical
performance feature” [6; p.45], by the mid-1990s technological improvements in electrical
technology ensured that robots with electrical actuator were able to meet the needs of some of
the users of robots with hydraulic actuators. Thus, during the time-period of our study,
manufacturers of hydraulic robots faced a potentially disruptive threat from robots with electrical
actuators.
To foreshadow our findings, we investigated the 10 largest global robot manufacturers
during the period 1970s-1990s. We find that, a) most of the large hydraulic robot manufacturers
had introduced robots with electrical actuators except, Prab, which lacked the relevant pre-
existing capability needed to manufacture robots with electrical actuators, and b) the largest
market-share holder, Unimation, which also lacked the pre-existing capability relevant to
electrical actuators, was one of the early movers to acquire the new capability and introduce
robots with electrical actuators. Our research suggests that when the large firms possess the
relevant pre-existing capability and the expected demand of the products made with the
sustaining technology is uncertain, they are likely to respond by introducing new products with
the disruptive new technology.
Next, we discuss the relevant literature. Thereafter, we discuss the context of this study,
the findings, and the implications of this study.

6
Literature Review
The notion of disruption has been formulated and refined by Christensen [1], [4], Adner
[2], Christensen and Overdorf [5], Danneels [3], Henderson [10], Govindarajan and Kopalle [11]
and others. Some of the early research (e.g., Christensen [1]) identified the major constructs of
this theory- the “performance trajectories” of sustaining and disruptive technologies and “critical
performance feature” of the products that customers wanted. These constructs sought to explain
the circumstances in which large firms could not respond to the challenge from smaller firms.
Christensen [1] suggested that the products based on the disruptive technologies are typically
cheaper, smaller, and simpler than the traditional products. However, over time, the disruptive
products are able to meet the requirements of the mainstream customers and causes disruption to
the large firms who listen too closely to their mainstream customers [6].
Several researchers have challenged the above-mentioned notion of disruption and have
suggested that firm-level factors- for example, the possession of technological capabilities ([9],
[12]) - can explain why large firms do not respond to potential disruption. Henderson [10; p.7]
opened the door for such an investigation when she suggested that "...incumbent firms fail to
respond to disruptive innovations because responding appropriately requires building
competencies they are ill-equipped to acquire and not because they focus too much on existing
customers and high-margin opportunities."
The lack of attention to pre-existing firm capabilities, during disruption, in the technology
literature is surprising, since the role of firm capabilities-- especially technological capabilities--
during technological change has been the focus of intense scrutiny among academicians for at
least three decades. Anderson and Tushman [13] linked firm capabilities to a technology’s
evolution and Tushman and Anderson [9] suggested that firms fail to respond to technological

7
changes when they are “competence-destroying” ones, i.e., one that “obsolesces and overturns
existing competencies, skills, and know-how” [14]. From this perspective, it seems likely that the
causal mechanism for large firm paralysis during disruption is a competence-destroying
technological change- a change where a firm does not introduce new products with the new
technology because it does not possess the prescient pre-existing capabilities to do so.
Building on Tushman and Anderson [9], Henderson and Clark [12] fine-tuned our
understanding of technological capability when they noted that component and architectural
capability were critical for firms during technological changes. Thus, more specifically, the
reason why a large firm does not introduce new products with the disruptive technology is that it
lacks the relevant pre-existing component and architectural capability necessary to respond to
such changes. This is the hypothesis that we test in this paper. We build up on Henderson and
Clark [12] and concentrate on component and architectural capabilities as the two drivers of
technological capabilities of a firm. In the following subsections, we discuss the pertinent
literature that deals with component and architectural capabilities.
Component capability. The engineering design literature has a long history of
distinguishing between the components and the product as a whole (see e.g., [15]). Clark [16]
defined a component as a physically distinct portion of the product that embodies a core design
concept and performs a well-defined function. According to Vincenti [17], component capability
includes an understanding of technologies and materials embodied in components and the skills
and problem solving strategies accumulated by applying a component. Roy and McEvily [18]
demonstrated that component capability affected the survival prospects of firms. Following these
researchers, we concentrate on component capability as source of persistent performance
differential amongst firms during disruption.

8
Architectural capability. Architectural capability of a firm is the ability of a firm to link
the various components, which the firm uses to manufacture its products, in a variety of ways.
Architectural capability affects product performance by determining how, and how well,
individual components fit together (i.e. how the set of components works together to deliver the
product’s functions; cf. [19]). Henderson and Clark [12] observed that accumulated architectural
capability acquired by designing products of the previous generations could blind a firm to the
design changes required to respond to new technologies. Other scholars (e.g., [20]) have used
terms such as integrative and combinative capabilities to suggest that architectural capability
may assist firms in surviving technological transitions by enabling firms to integrate their
component capability in new and flexible ways. Thus, we concentrate on architectural capability
of incumbents as being a source of differential firm performance during disruption.
Next, we discuss the context of this paper and explain the technological changes in the
industrial robotics industry. Thereafter, we explain firm responses to the disruptive threat in
terms of their component and architectural capabilities.
Industrial Robotics industry
Data
Our description of the context is based on the data that we collected from various
secondary sources, including Industrial Robots- A Survey (1972); Specifications and
Applications of Industrial Robots in Japan (1981, 1982, 1984, 1986, 1990, 1992, 1997); Robotics
Industry Directory (1982, 1983); British Robot Association’s Datafile (1982-83, 1987, 1997); A
Survey of Industrial Robots (1980, 1982); Industrial Robot Specifications 1983 (by Cugy and
Page); Industrieroboter (1979); Handbuch Industrieroboter (1982); International Robotics
Industry Directory (1984); International Robotics Products Directory (1989, 1990); Industrial

9
Robots Productivity Equipment Series (1983, 1985). Our sample consists of almost 1000
observations of new robot introductions or innovations on existing products by the nine largest
global robot manufacturers. In addition to these, various Robotic Industries Association (RIA)
publications and trade magazines like Industrial Robot, Industrial Robots International, Robotics
Today, Industrial Robots- A summary and forecast (1983), [21], [22], [23], USITC Pub. 1475,
and Society of Manufacturing Engineers Industrial Robots Forecast and Trends (1982, 1985)
provided valuable information. The product introduction data spanned from 1972 through 1997.
We obtained the number of electrical control system patents assigned to each large manufacturer
during 1970-1985 from the USPTO website. We obtained the product-line information for the
large manufacturers in 1980 from their annual reports and from various secondary sources and
trade journals.
Industrial robotics industry: From inception till the mid-1980s
According to the Robotics Industries Association, a generally accepted definition of robot
is “a reprogrammable multifunctional manipulator designed to move material, parts, tools or
specialized devices through variable programmed motions for the performance of a variety of
tasks.” The pioneers of the industry include US firms like Unimation (a subsidiary of Condec
Corp.), Cincinnati Milacron, Versatran, and Prab. Unimation sold the first industrial robot to
General Motors in 1961. By 1969, there were about 20 robots in service in the U.S., and in 1970
the U.S. robot population increased to 200. This number increased to 3849 by 1980. In 1982,
there were about 50 U.S. manufacturers of robots. Two of the largest firms (Unimation and
Cincinnati Milacron) accounted for almost 75% of the total shipments in the U.S.
Japan has been the leader in the demand for industrial robots and USA has been the
traditional second-largest market for robot manufacturers. In 1967, the first robot was imported

10
into Japan and, in 1968, Kawasaki Heavy Industries started manufacturing robots in technical
collaboration with Unimation. Subsequently other large firms like Hitachi, Toshiba, Fuji
Electric, and Fanuc started manufacturing robots. Shortage of labor and the oil shocks of the
1970s provided the boost to the industrial robotics industry in Japan. By the end of 1970s,
Japan’s robot population was around 14000 and there were about 140 Japanese robot
manufacturers. The early entrants in the European robot industry were firms like ABB, Olivetti,
and Siemens, and large automobile manufacturers like Volkswagen, Fiat, Renault, and Volvo.
The original product-market where customers demanded high load capacity: The
primary users of robots included automobile manufacturers who were involved in metal casting,
forging, spot welding, painting, machining, assembly, and palletizing. To these users, the critical
performance feature was the load capacity (i.e., the maximum load that the robot’s arm can
carry) ([22], [24]). Traditionally, in the U.S. and Western Europe, spot welding robots are about
30% of total population of robots followed by casting robots. Traditional manufacturers of robots
like Unimation and Prab had relied on hydraulic actuators to control their robots. Robots with
hydraulic actuators (or “hydraulic robots”) could achieve the highest load capacity. In contrast,
robots with electric actuators (or “electrical robots”) could achieve the best repeatability (i.e., the
precision with which a robot can return to the same position). Everything else being equal, the
higher the value of load capacity, the better it is and the lower the value of a robot's repeatability,
the better it is. The main advantage of robots with pneumatic actuators, which had an almost
insignificant market-share, was low cost.
Capabilities needed to manufacture robots with hydraulic actuator: A robot hand (or
the manipulator) is actuated by the command from the controller, which can be a computer or a
teach pendant. In hydraulic robots, these actuators consist of hydraulic motors and pumps

11
coupled in a circuit. Pumps generate the required fluid pressure and flow, which is used by
cylinders or motors for actuation. These systems use flowing liquid to transmit the energy from
generation point to actuation point. The generation point is typically a pump that generates the
required fluid power. The pressure generated by the hydraulic pump is distributed to the actuator
through control valves. Component capability needed to manufacture hydraulic robots included
that of hydraulic pump, hydraulic motor, valves, pressure gauges, and so on.
Advent of product-markets that demanded robots with repeatability: Although most
of the early robots utilized hydraulic actuators, changes in both the demand conditions and
technological innovations in electrical control technology ensured that most of the robots
manufactured since the mid-1980s utilized electrical actuators. The advent of computers,
calculators, cell phones, and other electronic gadgets led to the growth of small-parts assembly
product-market which demanded the robots for accurate handling of delicate parts and
repeatability was the critical performance feature for this market (Intelledex Inc. Report
published in Robotics World, June 1983). The electronic assembly plants started relying on
electric robots not only for higher repeatability, as compared to human labor, but also for the
cleaner operations that reduced the chances of contamination of the wafer surface from the
spillage of fluids in hydraulic robots. Demand from electronic product manufacturers fueled a
significant portion of the growth of the industrial robotics industry during the 1980s and 1990s
[25]. Additionally, around this time, small appliances, food processing, and pharmaceuticals
industries also started using electrical robots for high repeatability. Figure 1 highlights the
growing importance of electrical robots and shows the proportions of electrically actuated
assembly robots and hydraulically actuated welding and machine tending robots in the domestic
shipments of robots in the U.S. during late-1970s and early 1980s.

12
Insert Figure 1 about here
Capabilities needed to manufacture robots with electrical actuators: In these robots,
electric motors produce angular rotation and torque needed to move the robot arm. Electric
motors are typically assisted by feedback controllers, such as a potentiometer, which keep track
of the position of the robot arm and make necessary corrections to the arm’s location, which
improves the repeatability of these robots. Component capability needed to manufacture
electrical robots includes that of electrical motor, potentiometer, modulators, rectifiers, and
others.
Setting the stage for potential disruption in the industrial robotics industry
While the robots with electrical actuators targeted a product-market that demanded low
load capacity but high repeatability, innovations-- such as increases in AC servomotor power
output in the 1970s and 1980s-- enabled manufacturers to gradually increase the load capacity of
electrical robots. Since the early-1970s, significant innovations enhanced the capabilities of
brushless AC motors [26]. Yet another significant technological innovation that greatly enhanced
the suitability of electric motors for small-parts assembly jobs is the development of the Direct-
Drive robots. Originally developed by the Robotics Institute of the Carnegie-Mellon University
in 1980, these robots eliminated the use of gear-reducers in the robots. As a result of this change,
the repeatability of the robots could be enhanced significantly.
By the mid-1990s, the robots with electrical actuators had made in-roads into the
traditional hydraulically actuated robot product-markets. However, the robots used for moving
and assembly of the heaviest parts used in automobile and other product manufacturing, which
were 1000lbs or more in weight, were still the domain of hydraulic robots. Hence, the hydraulic
robot manufacturers faced a potentially disruptive threat from robots with electrical actuators

13
from mid-1970s till about mid-1990s, the time period of this study. Thus, this industry is well
suited for an investigation of the established notion that large firms do not respond to potentially
disruptive threats. Some of the major milestones in the evolution of the industrial robotics
industry are as follows:
1961: First robot sold by Unimation to GM
1970: US robot population reaches 200.
Early-1970s: Hydraulic robot market begins to grow
1974: First electrical robot is manufactured by ASEA
1977: Unimation starts manufacturing PUMA electrical robots
1979: Prab acquires Versatran division of American Machine and Foundry.
1980: World robot population crosses 20,000.
1980-1983: Electrical robot market begins to grow. Cincinnati Milacron, Fujitsu-Fanuc,
Mitsubishi Heavy Industries, and Kawasaki heavy Industries started
manufacturing electrical robot
Mid-1980s: All major robot manufacturers offer electrical robots, except Prab. ABB
acquires Trallfa, a hydraulic spray-painting robot manufacturer.
1988: ABB introduces first electric spray-painting robot, a traditional market of
hydraulic robots.
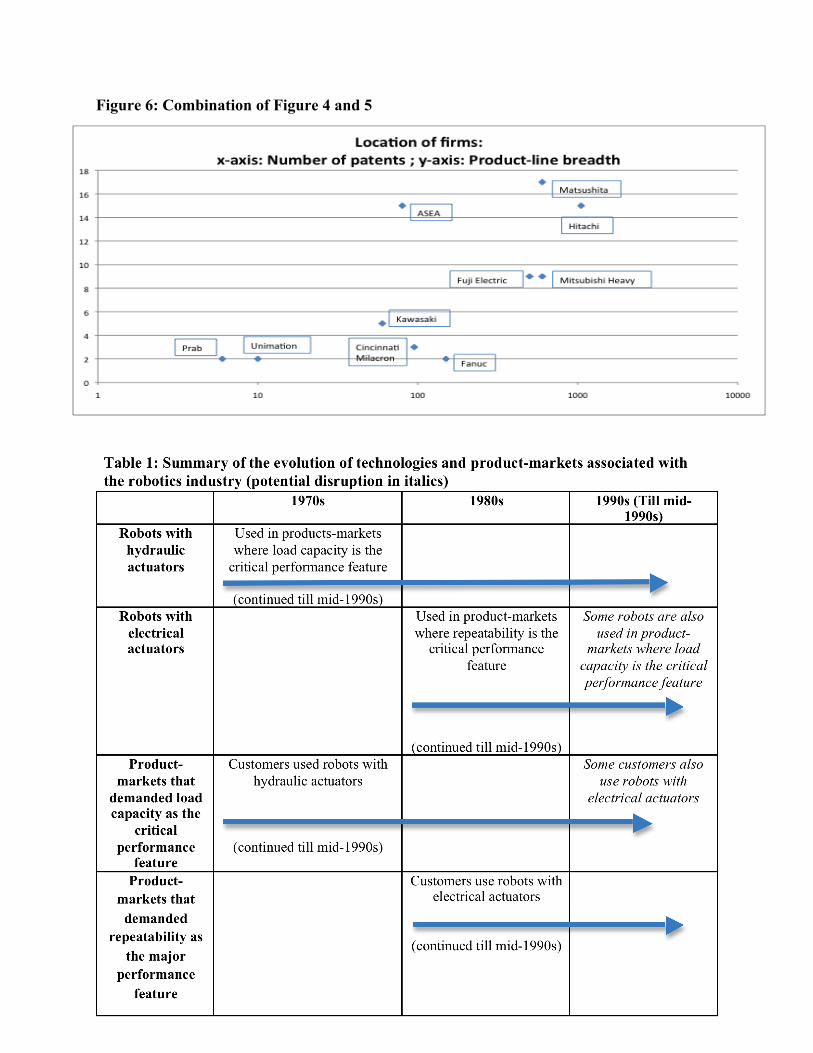
In Table 1 below, we summarize the evolution of various technologies and product-
markets involved in the industrial robotics industry.
Insert Table 1 about here

14
Mapping the changes in the industrial robotics industry to potential disruption: Next we
investigate if changes in the industrial robotics industry, since the late-1970s, satisfy most of the
characteristics of a potentially disruptive change as described in the literature [11], [27].
i) Disruptive products initially underperform the mainstream products in the critical
performance feature that the mainstream customers demand: Figure 2 shows the maximum load
capacity of the robots introduced over the years. Hydraulic robots by Prab have been the
historical leaders in the load capacity, followed by the hydraulic robots of Unimation. The four
leaders in load capacity during the 1970s were Prab, Unimation, Cincinnati Milacron, and
Kawasaki- all manufacturers of hydraulic robots at that time. However, by the 1990s, electrical
robot manufacturers were catching up with the load capacities offered by the hydraulic robots.
Insert Figure 2 about here
ii) Mainstream customers do not value the new performance feature provided by the
potentially disruptive product: Consistent with Christensen’s notion of disruption, the new
performance feature (repeatability) offered by the electrical robots was not highly valued by the
mainstream users, such as the automobile manufacturers.
iii) Disruptive products are typically cheaper than the mainstream products: Again
consistent with Christensen’s notion, the electric robots were cheaper than the hydraulic robots.
In the early 1980s, the electrical robots for small-parts assembly would typically cost around
$20,000 and the hydraulic robots for traditional jobs would cost around $60,000.
iv) Over time, the performance of the disruptive products improves and satisfies the
demand of the mainstream customers: By the mid-1980s, increases in the AC servomotors power
output enabled many of the electrical robot manufacturers to increase the load capacity of their
electrical robots. By the early 1990s, the electrical robots by ABB had surpassed the highest load

15
capacity of many of the hydraulic robots. The reverse—whereby the hydraulic robots could
improve their repeatability and target the product-market that valued electrical robots—did not
happen.
Consistent with Bower and Christensen’s observation that potentially disruptive
technologies initially “tend to be used and valued only in new markets or new applications” [6;
p.5], robots with electrical actuators were initially used in a new product-markets, such as the
small-parts assembly plants, and by the early 1990s, these robots were gradually making in-roads
in the product-markets that traditionally used robots with hydraulic-actuators.
The preceding discussion makes it clear that the manufacturers of robots with hydraulic
actuators faced a potentially disruptive threat from the robots with electrical actuators.
Response of large robot manufacturers to potential disruption:
To investigate the response of robot manufacturers to potential disruption, we
concentrated on the largest robot manufacturers in the U.S., Europe, and Japan like Unimation,
Prab, Cincinnati Milacron, Asea (now ABB), Kawasaki Heavy Industries, Fuji Electric, Fanuc,
Hitachi, Mitsubishi Heavy Industries, and Matsushita. This is consistent with most of the extant
research on disruption (e.g., [1]), which theorizes on large manufacturers only. During the late
1970s, the combined market-share of these manufacturers was more than 50% in their respective
home markets. In the U.S. in 1980, Cincinnati Milacron, Unimation, and Prab had almost 70% of
the total market. Figure 3 shows the corporate sales and robot sales of these manufacturers in the
early 1980s. This figure also shows that, as compared to the US manufacturers, the Japanese
manufacturers were bigger and more diversified. Next, we briefly describe the products
manufactured by these firms till the mid-1980s.

16
Unimation: Started in 1958 by the pioneer of industrial robotics, Joe Engelberger, Unimation
sold the first robot in 1961 to GM. Unimation’s robots had hydraulic actuators and were used in
spot welding. By the early 1980s, Unimation’s hydraulic robots could lift 450 lbs of load. It
started manufacturing electrical PUMA robots in 1977 when it took over Vicarm Inc. While high
on repeatability, the maximum load capacity of the PUMA robots was about 22 lbs in the early
1980s. In 1983, Unimation was the largest robot manufacturer in the US with about 50% market
share (by value). Unimation was taken over by Westinghouse in 1984, which in turn, sold the
direct-drive robot unit as Adept Technologies in 1984, licensed the hydraulic robot business to
Prab in 1987 and sold the rest of the electric robot business to a Swiss robot distributor, Staubli,
in 1988.
Cincinnati Milacron: A major producer of machine tools since the late 1800s, it started robot
R&D in 1969 and produced the first robot in 1974. It manufactured only hydraulic robots in the
1970s and started manufacturing electric robots in 1982. The firm had developed the capability
to manufacture both the hydraulic and electrical robots through in-house R&D [33; p.160]. In the
early 1980s, it was ranked second in market share in the US (by value). In 1990, Cincinnati
Milacron sold its robot business to ABB.
Prab Conveyors: Started manufacturing robots with hydraulic actuators for machine tool
loading and unloading in 1968. By the early 1980s, robot sales exceeded conveyor belt sales and
the typical Prab robot could lift 125 lbs of load. Prab robots were simple “pick and place” ones
and it was the only large US robot manufacturer that did not manufacture electrical robots.
Originally a manufacturer of conveyors, Prab started manufacturing robots when it
wanted to make something similar to Unimation’s robots “for half the price that will do the job”
(Prab President jack Wallace quoted in Inc., June, 1, 1982). Prab’s motto was-- "Prab Robots Inc.

17
keeps it simple" and its robots were uncomplicated ones, which were sold to small users. Unlike
Unimation and Cincinnati Milacron, which "devoted most of their time to going after the
automotive spot-welding lines; we've devoted our time to going after the one-here, two-there
applications. Our biggest user doesn't have more than 20 machines" (Prab Vice-President Walt
Weisel quoted in Inc., June 1, 1982). Thus, Prab was not dependent on one or two large buyers.
Prab acquired Versatran-- the robot manufacturing division of American Machine and
Foundry Corporation—in 1979. Versatran also manufactured hydraulic robots.
ASEA (later ABB): Swedish electronics company that pioneered electrical robots and produced
the first all-electric robot in 1974. As with any new potentially disruptive product, this new
robot, IRB-6, had a load capacity of 13.2 lbs. This was considerably inferior to the rated load
capacity of 99 lbs of MKII Series 4000 hydraulic robots by Unimation available since 1972. Also
in 1972, Prab’s Third Generation hydraulic robots had achieved a load capacity of 55 lbs. ABB
acquired the Norwegian company Trallfa, the pioneer of hydraulic spray-painting robots, in
1985. Spray painting robots, which rely on high load capacity robots, had traditionally been the
strongholds of hydraulic robots. However, innovations in the electric motor technology enabled
ABB to manufacture the first electric spray-painting robots in 1988
Fujitsu-Fanuc: Started as the computer-manufacturing unit of Fujitsu in 1956, it specialized in
manufacturing electrical motors. It became an independent company in 1972 and had almost
70% global market share in machine-control systems. It manufactured the first robot in 1975.
Although initially it manufactured only hydraulic robots, it started manufacturing electrical
robots soon after entering the industry (Industrial Robot, Dec., 1981, p.216). In 1983, it entered
into a strategic alliance with General Motors and instantaneously gained about 60% of the US
robot market-share.

18
Hitachi: Was established as a motor and transformer manufacturer in 1910. It manufactured
railroad cars, medical equipments, television components and other products, and manufactured
both hydraulic and electrical robots since the late 1970s. Since the mid-1980s, it manufactured
only electrical robots.
Kawasaki Heavy Industries: The pioneer of the Japanese robotics industry and the biggest
market-share holder (by value) in Japan in the early 1980s. It manufactured only hydraulic robots
in the 1970s in technical collaboration with Unimation. Toyota was one of its major customers.
Started manufacturing electrical robots in 1981 (Industrial Robot, Dec. 1981; p.221). It is one of
the largest manufacturing firms in Japan and was established as a ship-builder in 1878. It started
manufacturing steam-locomotives in 1911, aircrafts in 1922, trucks in 1933, helicopters in 1952,
and robots and motorcycles in 1969. Kawasaki terminated its contract with Unimation in 1985
and entered into a new contract with Adept to manufacture direct-drive electrical robots. By the
mid-1980s, Kawasaki’s electrical robots achieved better repeatability than those of ABB robots.
By the early 1990s, Kawasaki’s portfolio of industrial robots comprised of only electrical robots.
Mitsubishi Heavy Industries: Formed in 1884 as a ship-builder. Similar to Kawasaki, it
diversified into automobile manufacturing in the mid-1920s. It began producing hydraulic robots
in 1975 and manufactured material handling and spot welding robots. It started manufacturing
electrical robots in 1983.
Fuji Electric: Established in 1923 as a joint venture with Siemens, it manufactured electrical
instruments, fans, and motors. Started manufacturing electrical robots in the mid-1970s.
Matsushita: Formed in 1918 as electrical socket manufacturer, it started manufacturing lamps
and radios in the 1930s. Started manufacturing robots in the mid-1970s and sold the first
electrical robot in 1980.

19
Technological capabilities of large robot manufacturers
Pre-existing component capability of large manufacturers: To track the pre-existing
component capability of large manufacturers, we explored the number of electrical control
system patents that each of the large manufacturers held in the U.S. during the period 1970-1985.
Katila and Ahuja's [24] study on the industrial robotics industry points out that the more
knowledgeable firms are able to search deeper and introduce more products. Accordingly, we
assume that if a firm was assigned a patent in electrical systems, then it possessed the capability
required to manufacture components like electrical motor, potentiometer, modulators, and
rectifiers, which are used in manufacturing robots with electrical actuators. Since robots are not
classified as a separate product or technology category, we calculated the number of patents that
were issued to a firm in a given year that could be applied in manufacturing electrical robots. We
used keywords such as “robot,” “electrical,” “motor,” and “actuator” to identify robot-related
patents in the www.uspto.gov database. Figure 4 shows that the Japanese manufacturers like
Hitachi and Matsushita held more than 400 electrical robot related patents during 1970-1985, but
Unimation and Prab held less than 10 patents each during that period. Thus, Unimation and Prab
had the lowest component capability as compared to other manufacturers.
Architectural capability of large manufacturers: The increasing demand from the
electronics industry during the 1980s meant that the robot manufactures had to link the
components used in robot manufacturing and design the product architecture in a way so as to
reduce the downtime for maintenance for small-parts assemblers. Among other things, this
implies that robot manufacturers had to utilize their architectural or combinative capability to
link the components and subsystems in ways to reduce friction among the components,
effectively dissipate the heat generated by the operation of the system, and to “generate new

20
applications from existing knowledge” [20; p.391]. From an engineering viewpoint, firms
acquire architectural capability by manufacturing different products in which the components
and subsystems are linked in different ways. Capability to link the components and subsystems
in a variety of ways helps firms to create new products and also creates the absorptive capacity to
realize the linkages among the components in robots with different actuators. Hence the product-
line breadth [28] of firms should indicate their architectural capability. The more the product line
breadth of a firm, the more likely it is that the firm can utilize its existing architectural capability
in manufacturing new robots, including electrical robots. Hence, we explore the product-line
breadth of the robot manufacturers as a measure of their architectural capability. From the annual
reports and various other secondary sources, we measured the number of different products that a
manufacturer offered in 1980, when the world robot population crossed 20,000 for the first time.
Industry experts consider 1980 as the beginning of the electrical robot era in the US. The
population of electrical robots reached about 2.1% of total US robot population in 1980, and this
figure increased to almost 15% by the mid-1980s.
Various trade magazines regularly carried articles about robot manufacturers. These
articles described the history of the firms and the products manufactured by them. For example,
Industrial Robot (Dec. 1981, p.216) described in details the capabilities of Fanuc, and September
1980 issue (p.160) of the same magazine described the capabilities of Cincinnati Milacron. For
our operationalization, since Unimation manufactured only robots in 1980, we gave its product-
line breadth a value of ‘1’. Hitachi, manufactured several different types of products, like
household equipments, robots, machine tools, and so on, and its product-line breadth was ‘15’.
Figure 5 documents the product-line breadth of various manufacturers. It is evident that Hitachi,

21
Matsushita, Mitsubishi, and some other manufacturers had a higher value of product line breadth
than either Unimation or Prab.
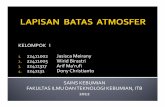
Pre-existing technological capability and their response to potentially disruptive
change: As shown in Figure 6, which is a combination of Figures 4 and 5, the largest robot
manufacturers were heterogeneous in terms of their pre-existing capabilities. Firms like
Matsushita, ABB, and Hitachi were better positioned, in terms of technological capabilities, to
respond to the change since these firms had more component and architectural capabilities than
others. For these firms, the advent of electrical robot was competency-enhancing change.
Moreover, all the large firms had introduced electrical robots, except Prab. As shown in Figure 6,
Prab had the least pre-existing technological capability that was relevant for electrical robots-
i.e., the advent of electrical robot was the most competency destroying for Prab.
Insert figures 3, 4, 5, and 6 about here
Divergence of our findings from theory’s predictions: Our findings diverged from the
predictions of Christensen’s notion of disruption in the following ways:
i) We find evidence that all large hydraulic robot manufacturers, except Prab, introduced
new products with the potentially disruptive technology relatively early, i.e., by 1983. This was
about three years after the demand of electrical robots from assembly and electrical and
electronics industries reached $10 million [36; p.346]. Contrary to the theoretical predictions
(e.g., [6]), Unimation, which had more than 50% of the US robot market share since the 1970s,
was one of the early movers to start manufacturing electrical robots.
ii) Unimation’s sales were mostly to large buyers like GM and Ford. Hence, according to
Christensen’s theory, Unimation would face the innovator’s dilemma and not respond to a

22
potentially disruptive threat if the new technology does not benefit its existing large buyers.
Despite this, Unimation was one of the early movers in the electrical robot market.
iii) Unlike Christensen’s notion that large manufacturers cannot effectively transition to
the new product-market (see e.g., [6; p.44], “However, these same companies are rarely in the
forefront of commercializing new technologies that don’t initially meet the needs of mainstream
customers and appeal only to small or emerging markets”), repeatability of Unimation’s
electrical robots approached that of Matsushita in the mid-1980s. Similarly, repeatability of
Kawasaki robots approached those of ABB’s robots by the mid-1980s.
iv) In addition to Unimation, Cincinnati Milacron, the second largest US market
shareholder, was also one of the early movers to enter the market for electrical robots.
v) Kawasaki, the largest market shareholder in Japan not only adopted electrical robots,
but also stopped manufacturing hydraulic robots in the mid-1980s. Mitsubishi and Kawasaki—
two of the largest Japanese manufacturers-- successfully switched from being hydraulic robot
manufacturers to electrical robot manufacturers. In fact, Industrial Robots International
(4/11/1983, p.2) reported that all major hydraulic robot manufacturers of Japan were introducing
electrical robots in the early 1980s.
vi) Although only one of the large robot manufacturers, Prab, seems to have conformed
to Christensen’s [1] notion of “disruption,” a deeper analysis suggests that even Prab’s example
contradicts Christensen’s theory. Prab had a number of smaller buyers and hence, according to
the existing theory, it should be less dependent on large buyers—and consequently less inertial--
as compared to Unimation, whose sales were concentrated to large buyers like GM and Ford.
Prab, however, contrary to the predictions, never introduced electrical robots.

23
vii) To introduce the potentially disruptive products, firms either relied on their pre-
existing capabilities or relied on mergers and acquisitions. Unimation developed the capabilities
to manufacture electrical robots by acquiring Vicarm Inc. in the late-1970s. Kawasaki developed
this capability by both inhouse and by licensing the electrical robot technology from Adept (the
Vicarm division of Unimation). Cincinnati Milacron developed the capabilities inhouse. All the
firms, except Prab, were committed to electrical robots. Many of these firms stopped
manufacturing hydraulic robots by the mid-1980s.
To summarize our findings, the causal mechanism for not introducing new products by
large firms, during disruption, seems to be more nuanced than what theory predicts. Inertia,
induced by the value systems and processes of large firms, who depend on large mainstream
buyers, did not prevent Unimation, Cincinnati Milacron and Kawasaki from successfully
responding to the potentially disruptive change. The only difference between these firms and
Prab seems to be that Prab possessed the least technological capabilities required to meet the
change. Thus, as suggested by Henderson [10], and as we had posited in the hypothesis, the
boundary condition for large firm inertia to potentially disruptive change seems to be a
competency destroying change, and not because the manufacturers listened to their large buyers,
as theory predicts.
Further refining of the boundary conditions: Although our result indicates that the
pre-existing capabilities constitute a boundary condition for market leaders’ response to a
potentially disruptive change, Table 2 illustrates that our findings in the robotics industry differ
from those of prior research in another interesting way. Prior research [5], [6] reports that firms
such as IBM and DEC had the ability (a search at the USPTO website reveals that IBM and DEC
were granted 7000+ and 148 patents respectively between 1970 and 1985) needed to respond to

24
the advent of personal computers, but did not introduce PCs—a disruptive innovation for
minicomputer manufacturers. In contrast, our findings suggest that some large hydraulic robot
manufacturers, such as Unimation and Cincinnati Milacron, either acquired the capabilities
through acquisition or built those capabilities inhouse, to respond to the threat. Thus, our results
seem to point to an anomaly in the theory and leads to yet unanswered question-- “Why did the
behavior of the large hydraulic robot manufacturers diverge from that of the large disk-drive or
computer manufacturers?” Before seeking some possible explanations to this question, we
wanted to ascertain that our findings indeed point to an anomaly in the theory.
Insert Table 2 about here
Christensen [4; p.45] noted that “True anomalies to the model would be where…….an
incumbent successfully builds an industry-leading business in a disruptive innovation by
developing and commercializing the disruption within the same business unit that is also
responsible for sustaining the profitable growth of he original, healthy, core business” (italics
added). Prior to extending the disruption theory, it is appropriate that we address the key words
and phrases in Christensen’s statement to ascertain that our finding is indeed an anomaly. First,
Cincinnati-Milacron, Unimation, and most of the other large manufacturers had maintained their
industry-leadership in the US and global industrial robotics market, till the mid-1980s when GM
became a producer of robotics. Second, within most of the large firms, both the electrical and
hydraulic robots were manufactured within the same division, typically the Robotics Division.
Third, although we are constrained by the lack of financial data on the profitability of the
robotics divisions of any firm, anecdotal evidences suggest that the robot business units of large
manufacturers were profitable in the late-1970s. Unimation, Cincinnati Milacron, Prab, and
ASEA had 44.4%, 32.2%, 6.1% and 2.8% share of the US robotics market, respectively, in 1980,

25
in dollar terms [31]. Since, several researchers have observed that market share is positively
correlated to profitability (see e.g., [30]), we can reasonably assume that these firms were
profitable in their robotics business. Additionally, there are anecdotal evidences to suggest
Unimation had been profitable since 1975 [32, p.273]. Thus, our paper very likely points to an
anomaly in the theory.
Next, we try to answer the question, “What might explain why the market leaders in
hydraulic robots-- Unimation, Kawasaki, and Cincinnati Milacron—introduced new products by
developing new capabilities to meet the challenge of potential disruption, but market leaders in
disk-drive industry (e.g., Seagate [6; p.48]), despite possessing relevant capabilities, did not?”
The hint of a possible explanation of the anomaly can be found in Christensen and Overdorf [5;
p.5], where they explain how the value systems of large corporations dictate if they introduce
new products with the disruptive technology. [4] posits that large firms evaluate new
opportunities in terms of a) the acceptable gross margins and b) the expected market-size of the
new market to make it interesting, where both “acceptable” and “interesting” are relative to the
existing, i.e., the sustaining market. One critical assumption in the above explanation is that the
emerging new market for products with disruptive innovation is more uncertain both in terms of
the its expected market size and profitability, as compared to the market for products with
sustaining innovation. We find evidences of this assumption when [6; p.47] notes that it is “often
difficult to project how big the market (new) technology will be over time” and “profit margins
are alluringly high for sustaining innovations.” However, this raises the follow-up questions--
“will large firms introduce new products with only sustaining innovation if the existing market’s
size and profitability are uncertain?” and “did the large manufacturers of hydraulic robot

26
introduce electrical robots fairly early because the expected market size and profitability of the
sustaining market was uncertain?”
We studied the history of the industry to look for answers to these questions. Although
we did not find evidence if the actual profitability of the hydraulic robots lived up to the
expectations of the manufacturers, we found evidences to suggest that the actual market size of
the hydraulic robot was much smaller than what the manufacturers had expected. By the late-
1970s, several prior market research studies that had consistently overestimated the potential
marker size for the hydraulic robots. For example, Arthur D. Little, Inc. had predicted a market
size of 5000 robots by 1972, but the actual market size was around 500 robots [34]. Additionally,
the Frost and Sullivan Survey of 1974 had predicted that robots with vision sensors would be
replacing assembly line workers by 1980. However, by the late 1970s, it was apparent to the
robot manufacturers that technological progress in vision sensors would take several more years,
if not decades, to replace human workers. Moreover, the Frost and Sullivan survey had also
predicted a robot population of 170,000 by 1985 in the US, but the actual US population of
robots was around 20,000 in that year [35]. The Time magazine reported (Limping Along in
Robot Land; July 13, 1987), that, in contrast to analysts’ expectation of about 250,000 robots in
American factories in 1987, the actual figure was about 25,000. Finally, it was clear by the late-
1970s that the total market size for hydraulic robots would be relatively small (see e.g.,
Carnegie-Mellon University Robotics Survey, 1981; The Industrial Robots- A Delphi Forecast of
Markets and Technology, published by the Society of Manufacturing Engineers in 1982 and
1985). All these evidences suggest that the sales revenues from sustaining innovations were
likely below-expectation and the manufacturers were likely uncertain if the future sales revenue
would meet their expectations. In contrast, the disk-drive manufacturers were relatively certain

27
of large revenues from sustaining innovation. For example, [6, p.48] notes that Seagate expected
$300 million in revenues from a sustaining innovation in the 5.25-inch disk drive. The robot
manufacturers, however, had a more intuitive and optimistic expectation for the electrical robot
market. For example, in 1978, General Motors observed that 90% of all the components handled
in manufacturing a car weighed five pounds or less. International Federation of Robotics cites
this as one of the factors that convinced Unimation to invest its resources in Vicarm Inc. to
develop the PUMA electrical robots (www.ifr.org/history accessed August 2012). The growth in
the demand of electrical robots in Japan in the 1970s, especially from the small electrical and
electronic component manufacturers [23], had likely convinced the robot manufacturers that the
potential market size for electrical robots was “acceptable.” The Society of Manufacturing
Engineers’ Delphi Forecast of Markets and Technology (1982; p. 20) predicted that electrical
robots with repeatability of 0.001 inch, or better, would be 40% of all robots sold in 1990, up
from 16% in 1980. In contrast to the relatively positive outlook for electrical robots, [6] hints
that the expected profitability from the disruptive innovation in disk drives was more relatively
uncertain (e.g., “According to their analysis, the 3.5-inch drive would never be competitive with
the 5.25-inch architecture” [6; p.48]).
Thus, our analyses suggests that, even if an innovation is potentially disruptive according
to the conditions suggested by [11] and [27], if the market size for products made with the
sustaining technology is uncertain, only the firms with the least amount of relevant pre-existing
technological capabilities are unlikely to introduce new products made with the disruptive
technology. Unlike the theory’s predictions, we do not find evidence that access to large buyers
is a source of inertia when firms introduce products with the potentially disruptive technology.

28
Thus, the pre-existing capabilities of large market-share holders and certainty of demand for
products made with the sustaining technology define the boundary conditions of the theory.
Discussion
Our research points out that the boundary conditions for the theory of disruption are more
nuanced than what prior research has predicted. We started by asking the question, “under what
conditions does a large firm responds to the potentially disruptive change by introducing new
products with a new technology?” In the context of the robotics industry, we observed that
despite electrical robot being potentially disruptive, both Unimation and Cincinnati Milacron, the
two largest hydraulic robot manufacturers, had developed the capability needed to manufacture
those robots. Prab, on the other hand, despite having the value systems that Christensen argues as
conducive to introducing products with the disruptive technology, had not developed the required
capability. In the process we extend the theory of disruption by suggesting that the pre-existing
capabilities of large market-share holders and certainty of demand for products made with the
sustaining technology define the boundary conditions of the theory.
Although our findings are inconsistent with those of Christensen’s, the departure of our
findings from those suggested by Christensen, however, opens up new opportunities for research.
Future research can explore the industry-specific and technology-specific factors that may lead to
different firm responses during disruption. The threshold of uncertainty in the markets for
products made with sustaining technology, beyond which a large manufacturer may introduce
new products made with the disruptive technology, is another likely avenue for future research.
A comparison of Unimation and Cincinnati Milacron suggests that large market-share holders
pursue different strategies to develop the capabilities needed to manufacture the new products,
while facing the threat of a potentially disruptive technology.

29
The paper suffers from several drawbacks. First, in addition to technological capabilities,
a firm possesses several other types of capabilities and routines, like the complementary
capabilities and marketing capabilities, and we do not take those into account for our analyses.
Second, the paper does not address several other possible explanations that might explain the
divergent behavior of market leaders in hydraulic robots and hard disk drives. For example,
hydraulic robots were largely used by a handful of large industrial firms like automobile
manufacturers. These manufacturers make “lumpy” purchases, i.e., they typically buy millions of
dollars of robots and they do so only once in many years. [29] noted that lumpy purchases
exacerbate competition. Since the buying pattern of hard-disk drive users was less lumpy, rivalry
may have been less intense, and hence the responses of disk-drive manufacturers may have been
different from those of robot manufacturers. Third, future research needs to explore if our results
hold for other types of firm responses, such as hiring new R&D personnel with knowledge in the
new technology. Fourth, we do not consider some alternative explanations, such as the role of
Robotics Industries Association in the US, which may have provided critical information about
market trends to Unimation and Cincinnati Milacron, and thereby helped them to develop the
capabilities required to manufacture the potentially disruptive products. Similarly, networks
among other manufacturers, such as Unimation and Kawasaki, where the latter had licensed the
technology of the former, may have prompted firms such as Kawasaki to adopt the technology
for manufacturing electrical robots. Future research needs to systematically investigate the role
of networks among manufacturers during potential disruption. Finally, we do not consider the
alternative explanation that whether a firm responds to a disruptive threat or not depends on the
cognitive capabilities of the senior managers. Future research needs to investigate how Joe

30
Engelberger, the founder of Unimation, and Peter Ruppe and Allen Bodycomb of Prab, helped
shape the strategies of their firms during a potentially disruptive threat.
Despite these limitations, this paper extends the literature and implies that the causal
mechanism of “disruption” is more nuanced than what literature suggests.
Figure 1: Proportions of robots of various applications in the domestic shipments of robots in the U.S. by year (Machine tending= Machine tool loading and unloading robots) (Source: USITC Pub. 1475, Dec. 1983)
Figure 2: Improvement of maximum load capacity of hydraulic and electric robots (in lbs)
Figure 3: Sales of major robot manufacturers (in $ MM, in the early 1980s) (Sources: Annual
Reports)
0
10
20
30
40
50
60
1979 1980 1981 1982 1983 (Est.)
Perc
ent
Welding Robots
Assembly Robots
Machine tending
1
10
100
1000
10000
Mid-1970s Late 1970s Early 1980s Mid 1980s Early 1990s Mid 1990s
Maximum load capacity of hydraulic robot Maximum load capacity of electric robot
1 10
100 1000
10000
Unimation Cincinnati Milacron
Prab ASEA Kawasaki Fanuc Fuji Electric
Matsushita Mitsubishi Heavy
Corporate sales
Robot sales

31
Figure 4: Electrical control systems patents assigned to Robot manufacturers during 1970-1985
Figure 5: Product line breadth of robot manufacturers in 1980
1
10
100
1000 Pa
tent
s
0
2
4
6
8
10
12
14
16
18
No.
of
prod
ucts
32
Figure 6: Combination of Figure 4 and 5

33
Table 2: Comparison of our findings to those in extant literature (Firms mentioned in [5] and [6] in italics; Relatively low-extent of pre-existing capability= <100 patents and <9 products based on Figure 6)
Introduces new products with potentially disruptive
technology fairly early
Does not introduce new products with the potentially disruptive technology (or are
late in introducing those products) Possesses relevant pre-existing capability to a relatively high extent
ASEA; Fuji; Matsushita; Fanuc; Hitachi; Mitsubishi
Digital Equipment Corp.; IBM
Possesses relevant pre-existing capability to a relatively low extent
Kawasaki; Unimation
Cincinnati Milacron
Prab
References
[1] C.M. Christensen. The innovator’s dilemma. Boston, MA: Harvard Business School Press. 1997.
[2] R. Adner, When are technologies disruptive? A demand-based view of the emergence of
competition. Strategic Management Journal, 23: 667-688. 2002. [3] E. Danneels. Disruptive technology reconsidered: A critique and research agenda.
Journal of Product Innovation Management, 21(4): 246-258. 2004. [4] C.M. Christensen. The ongoing process of building a theory of disruption. Journal of
Product Innovation Management, 23:39-55. 2006. [5] C.M. Christensen & M. Overdorf. Meeting the challenge of disruptive change. Harvard
Business Review, 78(2): 66-76. 2000. [6] J.L. Bower & C. M. Christensen. Disruptive technologies: Catching the wave. Harvard
Business Review, 73(1): 43-53. 1995. [7] M. Tripsas. Surviving radical technological change through dynamic capability: Evidence
from the typesetter industry. Industrial and Corporate Change, 7: 341-377. 1997. [8] R. Dubin, Theory Building. Free Press/MacMillan, New York, 1978. [9] M.L. Tushman & P. Anderson. Technological discontinuities and organizational
environments. Administrative Science Quarterly, 31:439-65. 1986 [10] R. M. Henderson. The innovator’s dilemma as a problem of organizational competence.
The Journal of Product Innovation Management, 23:5-11. 2006. [11] V. Govindarajan & P.K. Kopalle. Disruptiveness of innovations: Measurement and an
assessment of reliability and validity. Strategic Management Journal, 27:189-199. 2006.

34
[12] R.M. Henderson & K.B. Clark. Architectural innovation: The reconfiguration of existing
product technologies and the failure of established firms. Administrative Science Quarterly, 35:9-30. 1990.
[13] P. Anderson & M. Tushman. Technological discontinuities and dominant designs: A
cyclical model of technological change. Administrative Science Quarterly, 35: 604-634. 1990.
[14] H. Gatignon, M.L. Tushman, W. Smith, & P. Anderson. A structural approach to
assessing innovation: Construct development of innovation locus, type, and characteristics. Management Science, 48(9): 1103-1122. 2002.
[15] D.L. Marples. Decisions of engineering design. IEEE Transactions on Engineering
Management, 55-71. 1961. [16] K.B. Clark. The interaction of design hierarchies and market concepts in technological
evolution. Research Policy, 14: 235-251. 1985. [17] W. G. Vincenti. What engineers know and how they know it. Baltimore: Johns Hopkins
Press. 1990. [18] R. Roy & S. K. McEvily. Incumbent survival during market fusion in matured industries:
The influence of component and architectural capabilities on the survival of U.S. machine tool manufacturers during 1975-1995. Advances in Strategic Management, Vol. 21. 2004.
[19] C.Y. Baldwin & K.B. Clark. Design rules: The power of modularity. Cambridge: MIT
Press. 2000. [20] B. Kogut & U. Zander. Knowledge of the firm, combinative capabilities, and the
replication of technology. Organization Science, 3(3): 383-397. 1992. [21] J. Karlsson. A decade of robotics. Mekanforbundets Forlag, Sweden: Stockholm. 1991. [22] S. Klepper. Collaborations in robotics. In Mowery, D. (Ed.), International collaborative
ventures in U.S. manufacturing. Cambridge, MA: Ballinger Publishing. 1985. [23] K. Sadamoto. Robots in the Japanese economy: Facts about robots and their
significance. Tokyo: Survey Japan. 1981. [24] R. Katila & G. Ahuja. Something old, something new: A longitudinal study of search
behavior and new product introduction. Academy of Management Journal, 45:183-94. 2002.
[25] B. Carlisle. Robotics: Doing well, will do better. Manufacturing Engineering, May 2003.

35
[26] G. Brown. Brushless motors will soon be all the rage. Robot News International. 1983. [27] C.C.Hang, D.Yu, & K.H.Chai. An Exploratory Study on Understanding the
Technological Dimension in Disruptive Innovation. The 5th International Symposium on Management of Technology. 2007.
[28] S. Kekre & K. Srinivasan. Broader product line: A necessity to achieve success?
Management Science, 36(10): 1216-1231. 1990 [29] P. Ghemawat. Games Businesses Play: Cases and Models. MIT Press, Cambridge, MA.
1997. [30] J. Bercovitz & W. Mitchell. When is more better? The impact of business scale and scope
on long-term business survival, while controlling for profitability. Strategic Management Journal, 28, 61–80. 2007.
[31] L.Conigliaro. Robotics Newsletter, Number 9, Bache Halsey Stuart Shield, Inc. 1982. [32] K. Flamm. The changing pattern of industrial robot use. In R.M.Cyert and D.M.Mowery
(Eds.). The impact of technological change on employment and economic growth. Cambridge, MA: Ballinger Publishing Co. 1988.
[33] Spotlight on Cincinnati Milacron. The Industrial Robot, September 1980. [34] Final Report of Technology Assessment: The Impact of Robots. September 30, 1979. [35] A. Tani. International comparisons of industrial robot penetration. Working paper.
International Institute for Applied Systems Analysis, Austria. 1987. [36] V. Daniel Hunt. Industrial Robotics Handbook. New York: Industrial Press Inc. 1983.