Electromyographic analysis of trunk and pelvis muscles during ...
Upload
independentCategory
view
0download
0
Exp Brain Res (1998) 118:210±220 � Springer-Verlag 1998
R E S E A R C H A R T I C L E
Alexei Alexandrov ´ Alexander Frolov ´ Jean Massion
Axial synergies during human upper trunk bending
Received: 8 August 1996 / Accepted: 7 July 1997
A. Alexandrov ´ A. FrolovInstitute of Higher Nervous Activity and Neurophysiology,Russian Academy of Science, 5A, Butlerov, Moscow,Russia 117865
J. Massion ())Laboratory of Neurobiology and Movements, CNRS,31 Chemin Joseph Aiguier, F-13402 Marseille cedex 20, France
Abstract Upper trunk bending movements were accom-panied by opposite movements of the lower body seg-ments. These axial kinematic synergies maintained equi-librium during the movement performance by stabilizingthe center of gravity (CG), which shifted on averageacross all the subjects by 1�4 cm in the anteroposterior di-rection and thus always remained within the support area.The aim of the present investigation was to provide an in-sight into the central control responsible for the perfor-mance of these synergies. The kinematic analysis wasperformed by the method of principal components (PC)analysis applied to the covariation between ankle, kneeand hip joint angles and compared with CG shifts duringupper trunk bending. Subjects were asked to performbackward or forward upper trunk bending in response toa tone. They were instructed to move as fast as possibleor slowly (2 s), with high or low movement amplitudes.PC analysis showed a strong correlation between hip,knee and ankle joint changes. The first principal compo-nent (PC1) representing a multijoint movement with fixedratios between joint angular changes, accounted, on aver-age, for 99.7%�0.2% of the total angular variance in theforward trunk movements and for 98.4%�1.4% in thebackward movements. The instructed voluntary regula-tion of the amplitude and velocity of the movement wasachieved by adapting the bell-shaped profile of the veloc-ity time course without changes in interjoint angular rela-tions. Fixed ratios between changes in joint angles, repre-sented by PC1, ensured localization of the CG within thesupport area during trunk bending. The ratios given byPC1 showed highly significant dependence on subjects,suggesting the adaptability of the central control to eachsubject�s biomechanical peculiarities. Subject�s intertrialvariability of PC1 ratios was small, suggesting a stereo-
typed automatic interjoint coordination. When changingvelocity and amplitude of the movement, the ratios re-mained the same in about half the subjects while in othersslight variations were observed. A weak second principalcomponent (PC2) was shown only for fast movements. Inforward movements PC2 reflected the early knee flexionthat seems related to the disturbances caused by the pas-sive interaction between body segments, rather than to theeffect of a central command. In fast backward move-ments, PC2 reflected the delay in hip extension relativeto the movement onset in the ankle and knee that mirrorsintersubject differences in the initiation process of the ax-ial synergy. The results suggest that PC1 reflects the cen-trally controlled multijoint movement, defining the timecourse and amplitude of the movement and fixing the ra-tios between changes in joint angles. They support the hy-pothesis that the axial kinematic synergies result from acentral automatic control that stabilizes the CG shift inthe anteroposterior direction while performing the uppertrunk bending.
Key words Equilibrium ´ Multijoint coordination ´Axial synergy ´ Trunk movement
Introduction
Upper trunk bending in humans is accompanied by lowersegment movements in the opposite direction as first de-scribed by Babinski (1899). He called this phenomenonªaxial synergyº and suggested that it may serve to preventlarge anteroposterior shifts of the center of gravity (CG)in order to maintain equilibrium during the move-ment.Several indirect pieces of evidence suggest thatthe axial kinematic synergies are not only the result ofmechanical interactions between segments (which actual-ly exist: Ramos and Stark 1990), but are centrally con-trolled in a feedforward manner. Firstly, the kinematicchanges in each joint are preceded by a burst in a set ofmuscles responsible for movement initiation in the trunk,thigh and shank segments (Crenna et al. 1987; Oddsson

211
and Thorstensson 1987). This indicates that a central con-trol occurs which acts on the different segments involvedin the axial synergy. Secondly, experiments carried outduring cosmic space flight have shown that even undermicrogravity conditions, when it is not necessary to main-tain equilibrium, the axial synergies are preserved (Mass-ion et al. 1993, 1997). This suggests that the observedmovement pattern is the result of feedforward central con-trol rather than of online feedback-based corrections ofthe CG position. The feedforward descending commandmay have been learned under normal gravity conditionsand then automatically reproduced under microgravityconditions.
The main goal of the present study was to quantify ax-ial synergies in order to gain indirect insight into the so-lutions adopted by the central nervous system for controlof kinematic synergy. In particular, the article focuses onthe problem of a redundant number of kinematic degreesof freedom (DF) that must be ªovercomeº (Bernstein1967) during movement performance.
The present study was carried out in the framework ofa simplified three-joint model, in which the kinematics ofmovement in the sagittal plane were represented as a ro-tation of three rigid segments (leg, thigh and trunk) atthree pin joints (ankle, knee and hip) (Young et al.1990). It implies that these three kinematic DFs ± the an-kle, knee and hip joint angles ± mainly characterize thekinematic pattern of the upper trunk bending movement.The localization of the CG inside the relatively small sup-port area imposes one evident behavioral constraint onthree otherwise independent joint angles. This constraintcan reduce but not eliminate the kinematic redundancyof the 3-DF system examined, i.e., the same movementof the upper trunk that is accompanied by the same an-teroposterior CG shift might be executed by numeroussets of interjoint angular changes.
The quantitative analysis of the movement kinematicsincluded the method of principal components (PC) analy-sis and an anthropometric model for the estimation of CGshifts. The experimental estimation of CG shifts wasbased on force platform data.
Overall, it was found that the axial kinematic synergywas close (about 99% of total angular variance) to a 1-DFmovement. The kinematic synergy revealed favors the hy-pothesis that the intended movement is centrally plannedin terms of (a) the time course profile of the movement(which defines its speed and amplitude and is addressedto each joint) and (b) the interjoint coordination, withfixed ratios between changes in the joint angles (whichspecify the kinematic synergy responsible for the move-ment and the CG localization within the support area).
Materials and methods
Experiments were done on 10 healthy subjects (6 men and 4 wom-en), age 24±47 years, weight 52±74 kg and height 155±180 cm. Thestudy was performed with the written consent of each subject andapproved by the local ethics commitee (CCPPRB).
Experimental paradigm and set-up
The subjects were asked to stand quietly with their eyes open andtheir hands clasped behind the back. In response to a tone signal,the subjects were instructed to perform upper trunk bending (for-ward or backward) in the sagittal plane and then to hold the final po-sition for 3 s.The movement was performed under various experi-mental conditions specifying its amplitude and duration. Subjectswere instructed to move either as fast as possible (fast series of tri-als) or slowly for about 2 s (slow series of trials). They were asked tobend the upper trunk to about 30�±40� from the initially vertical po-sition (high-amplitude series). Three subjects in forward bendingand three subjects in backward bending were asked to perform, inaddition, a fast series with a trunk inclination of about half the pre-vious amplitude (low-amplitude series).
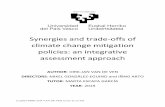
The projections of four retroreflective markers onto the sagittalplane were used for joint angle calculations. The markers wereplaced on one side of the subject (1, malleolus; 2, tibial plateau;3, upper femoral trochanter; and 4, acromion) as shown in Fig. 1.The angle between the line 1±2 (a line connecting marker 1 withmarker 2) and the horizontal axis was taken as the ankle joint angle(j1 in Fig. 1). The angles j2 (between lines 2±1 and 2±3) and j3 (be-tween lines 3±2 and 3±4) were taken as the knee and hip joint anglesrespectively.
The amplitude and duration of the movement were measuredfrom the angle between the trunk segment (line 3±4) and vertical.Movement duration was taken as the time elapsing between the on-set and the end of the trunk segment angular velocity curve, withthreshold corresponding to 5% of the peak velocity. The ELITE sys-tem of movement analysis (Ferrigno and Pedotti 1985) was usedwith a sampling rate of 100 Hz. Digital filtering of the recordingsof the markers� sagittal trajectories was performed (ELITE software)and the measurement accuracy of the sagittal angles was 0.2� for the50-cm distance between markers.
Subjects stood on a force platform equipped with piezoelectrictransducers (Kistler). The anteroposterior position of the center ofpressure (CP) was recorded during movement performance. Un-der static conditions, before movement onset and at 0.5 s afterthe end of the movement, the CP position and the CG projectiononto the force platform coincide. The difference between the ini-tial and final CP positions was used to estimate the anteroposte-rior CG shift.
Fig. 1 Multijoint model of the human body and marker positions(1±4). The lines between markers correspond to the three segments.The increase in j1corresponds to ankle extension, in j2to knee flex-ion, and in j3 to hip extension

212
Principal components analysis of the data
PC analysis was carried out in a similar way to that done by Mah etal (1994). In the present study, we examined the linear covariationover time between three joint angles (ankle, knee and hip).
The vector of temporal variation of the three joint angles ji (t)around their mean values jMi (i=1, 2, 3) is represented in the PCanalysis as the weighted sum of three orthogonal and normalizedcompounds (a sum of PCs):
j1�t�ÿjM1j2�t�ÿjM2j3�t�ÿjM3
0@ 1A� w11
w12
w13
0@ 1Ax1�t��w21
w22
w23
0@ 1Ax2�t��w31
w32
w33
0@ 1Ax3�t�
�1�Xj�1;2;3
� 1; i� k0; i� k
i� 1;2;3 �2�
where wij is the weight of the variation of the joint angle jj in the ithPC. Each ith PC in (1) is defined by a vector (ªPC vectorº) of threeconstant normalized signed weights wij (j=1, 2, 3), called ªPC load-ingsº, and by a corresponding time-dependent scaling factor xi (t),called ªPC factorº (Mah et al. 1994). PCs were calculated by thevalues of joint angles for any moment of time starting 100 ms beforemovement onset up to 100 ms after the end of the movement. Theonset and the end of the movement were taken as the 5% threshold.of the trunk peak angular velocity
The sum of angles� squared deviations about their mean valuesover time is a total angular variance (or variation in all the angles).In (1), the higher-order PC accounts for a progressively smaller por-tion in the total angular variance.
If any pair of loadings in a PC has the same sign, then the cor-responding joint angles vary in the same direction (respectively bothincreasing or decreasing). Oppositely signed loadings correspond toreciprocally related angles.
The covariation matrix (calculated on the basis of the non-nor-malized angular values) was used for the PC analysis instead ofthe correlation matrix (calculated on the basis of the angles normal-ized on the amplitudes). The latter increases the contribution of theangles with small excursions to the first principal component (PC1).Since the relative influence of chance factors and dynamic distur-bances on the kinematics is higher for the angles with small excur-sions, one could expect that the use of the correlation matrix mightartificially increase the contribution of these disturbances to PC1. Asan example, in fast forward movement the knee excursion was smalland showed a different time course relative to the other joints (seebelow). The use of the correlation matrix in this case should artifi-cially stress the effect of these small changes and their variability onPC1. However, the covariation matrix enhances the contribution ofthe relatively large hip movement in forward bending (see Results).Bearing in mind the limitations of each possible method, we usedthe covariation method as done by Mah et al. (1994) in the analysisof gait.
Statistical methods
A nonparametric test for unpaired samples (Mann-Whitney test) wasused to check the differences between movement duration in fastversus slow series and between movement amplitude in high-ampli-tude versus low-amplitude series in each individual subject. A sim-ilar comparison was performed for duration and amplitude of PC1factor. The differences between onsets of the movement in differentjoints were checked by the Wilcoxon rank test for paired samples.
In the movement representation (1), PC loadings, indicating theratios between changes in the ankle, knee and hip joint angles, canserve as quantitative characteristics of the interjoint kinematic coor-dination during movement execution. The level of intertrial, inter-condition and intersubject variability of the PC loadings is thereforeused in the present study for quantitative estimation of variability ofinterjoint coordination in automatic motor control. These variabili-ties were estimated by multifactorial analysis of variance (ANOVA).
In addition, the intercondition differences in PC loadings in each in-dividual subject were estimated by Mann-Whitney test.
As an index of intertrial variability of the PC vector as a whole,we used the value
V �����������������������������������SD2
1� SD22� SD2
3
q=�������������������������������w2
1�w22�w2
3�q
� 100% �3�where wi and SDiare respectively loadings, averaged across the trialseries, and their standard deviations. Note that conditions (2) are notvalid for the mean loadings wi: due to the averaging procedure.Hence, the denominator in (3) is less than 1.
The intercondition differences of anteroposterior CG shifts in in-dividual subjects were estimated by Mann-Whitney test.
Results
General characteristics of the movement
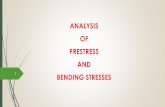
Figures 2 and 3 show the joint angle time courses for rep-resentative series of upper trunk forward and backwardbending. Overall, forward bending was performed byflexion in the hip and extension in the knee and anklejoints. As an exception, subject S3 showed flexion inthe knee joint. Backward upper trunk bending was per-formed by extension in the hip and flexion in the kneeand ankle joints.The movement durations averaged acrossall fast trials of all subjects were 0.81�0.22 (�SD) s and0.7�0.1 s respectively in forward and backward bending.In the slow series, the durations increased to 2.0�0.3 s and1.9�0.2 s respectively. In each subject the increase in themean duration in the slow series was highly significant inrelation to the fast series (P<0.0001).
The movement amplitude (i.e., the angular excursionof the upper trunk segment) averaged across all trials
Fig. 2 Forward upper trunk bending: the time courses (�SDs) ofjoint angles, averaged over fast and slow series with high amplitude(subject S1)

213
and subjects was 50��7� and 30��6� respectively in for-ward and backward bending under the high-amplitudeconditions. In addition to the movements with a highamplitude, three subjects (S1, S9, S10) performed alow-amplitude fast series. The mean amplitudes of themovement under high-amplitude versus low-amplitudeconditions in these subjects were respectively59��11� versus 37��9� in forward bending and32��4� versus 21��2� in backward bending. In eachof them, the decrease in the mean amplitude in accor-dance with the amplitude conditions was highly signif-icant (P<0.0001).
In forward bending, the mean ranges of the movements(ROMs) in the high-amplitude series for ankle extension,knee extension and hip flexion were 11��4�, 6��2� and56��9� respectively. Subject S3 produced knee flexionof 3��1�. In backward bending, the ROMs in the high-am-plitude series for ankle flexion, knee flexion and hip ex-tension were 19��8�, 29��11� and 21��6�. Thus, whilein forward bending the knee ROM was relatively smalland the hip ROM was the largest, in backward bendingthe relative changes in all three angles were comparable.
In forward bending, in the fast series of trials, the kneejoint flexed slightly at the beginning of the movement andthen finally extended at the end, while the hip and ankleangle changes were monotonic (Fig. 2). In the slow series,the initial knee flexion mentioned above was not ob-served.
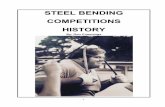
In backward bending, in six of nine subjects (Fig. 3)the hip extension was slightly delayed relative to the onsetof movement in the lower joints, whereas the differencebetween the onsets of the knee and ankle movementswas not statistically significant in all subjects (Wilcoxon
rank test, P>0.1). Figure 3 shows the joint angle timecourses (and SDs) for the fast series in two subjectswho demonstrated maximally advanced (subject S6,Fig. 3, left side) and maximally delayed (subject S2,Fig. 3, right side) onsets of hip extension with respectto the onset of movement in the ankle.
The passive range of motion was not measured foreach subject. In forward bending, for ankle and hipjoints, the recorded ROMs were evidently lower thanthe passive ROM in normal subjects. For the knee, thehighest values in extension were close to the mechanicallimits (180�). As regards knee flexion, this was alwaysfar from its mechanical limits. In backward bending,the observed ankle and knee flexion were lower thanthe passive ROMs in normal subjects. It is not excludedthat the greatest hip extension could be close to its me-chanical limit, which is about 15� in humans. Thereforeextension of the spinal column might also contribute tobackward bending.
PC analysis
On average across all the trials, the PC1 percentage intotal angular variance was 99.7%�0.2% in forward bend-ing and 98.4%�1.4% in backward bending. The axialsynergy was therefore well represented by PC1 alone.The residual variance was explained by PC2. The contri-bution of PC3 was negligibly small (less than 0.03% ofthe total variance) and we did not show PC3 in the pres-ent study.
As mentioned in the Materials and methods, each PCincludes a set of three fixed ratios between angular chang-es in the ankle, knee and hip joints (PC loadings) and onetime-dependent factor that scales the time course of themovement (PC factor).
Characteristics of PC1 loadings(ratios between angular changes)
Figures 4±7 show PC1 loadings averaged in each series oftrials under a given movement condition. Overall, thesigns of loadings in PC1 were the same across all subjectsand conditions, indicating hip flexion, knee and ankle ex-tension in forward bending and hip extension and kneeand ankle flexion in backward bending. As an exception,subject S3 performed knee flexion during forward bend-ing (see negative PC1 loading for the knee joint of S3;Fig. 4).
In forward bending, the absolute value of PC1 loadingfor the hip joint angle was always the largest (0.97�0.02on average across all subjects and conditions). The anklejoint had an intermediate absolute value of PC1 loading(0.19�0.06), whereas for the knee the absolute value ofthe PC1 loading was the smallest (0.12�0.04) except forsubject S4, whose knee and ankle loadings were approx-imately the same (Fig. 4). In backward bending, the abso-lute values of PC1 loadings for the ankle, knee and hip
Fig. 3 Backward upper trunk bending: the time courses (�SDs) ofjoint angles, averaged over the fast series with high amplitude (sub-jects S6 and S2). Dashed lines indicate the onset of the movement inthe ankle and knee joints. An arrow indicates the onset of hip exten-sion (subject S2). A schematic representation of joint angle changesin the initial phase of the movement is shown at the bottom

214
were comparable and amounted to 0.45�0.11, 0.67�0.14and 0.51�0.22 respectively.
Index V for intertrial variability of the PC1 vector (setof PC1 loadings defining the ratios between angularchanges) was 2.5%�0.6% on average across all subjectsand conditions in forward bending. In backward bendingit was about 2 times higher than in forward bending, and
amounted to 5.2%�2.8%. The relatively small values ofindex V indicates that, within a given condition, the inter-trial variability for the ratios between changes in the an-gles was small. The interjoint coordination was thereforerather stereotyped and reproducible from trial to trial. Theobserved low value of intertrial variability of PC1 load-ings in each subject is illustrated also by the small SDsof the loadings represented in Figs. 4±7.
In each individual subject, the intercondition differ-ence for PC1 loadings was shown to be statistically signif-icant in several cases indicated in Figs. 4±7. However, itis seen that the observed differences were in general rel-atively small. As an exception, subject S9 showed a rela-tively large difference in interjoint coordination whencomparing the movements with high and low amplitude(Fig. 7, PC1 loadings of S9).
However, ANOVA showed that intercondition vari-ability of PC1 loadings was smaller than the intersubjectvariability. Thus, when comparing fast and slow forwardbending (Fig. 4), in each of three loadings a large subjectdependence was indicated [F(7, 123)=229.5, 196.8 and204.5 respectively for the ankle, knee and hip,P<0.0001]. Less dependence on movement durationwas indicated in the loadings for the ankle [F(1,123)=17.3, P=0.0002] and knee [F(1, 123)=11.4,P=0.001], whereas for hip loading the effect of movementduration was not significant [F(7, 123)=0.6, P=0.46].When comparing forward bending with high and low am-plitude (Fig. 5), PC1 loadings were again largely subject-dependent [F(2, 46)=105.4, 26.5 and 30.3 respectively forthe ankle, knee and hip, P<0.0001]. They were lessamplitude-dependent for the ankle [F(1, 46)=12.5,P=0.001] and hip [F(1, 46)=9.2, P=0.004], whereas forthe knee loading the effect of movement amplitude wasnot significant [F(1, 46)=0.4, P=0.51]. When comparingfast and slow backward bending (Fig. 6), a large subject
Fig. 4 Forward upper trunkbending: center of gravity (CG)shifts and loadings of the firstprincipal component (PC1) infast and slow movements withhigh amplitude. Note the lowSD for the loadings
Fig. 5 Forward upper trunk bending: CG shifts and loadings of PC1in fast movements with high and low amplitude. Note the low SDfor the loadings

215
dependence was again shown in all three loadings [F(7,123)=401.3, 334.4 and 468.7 respectively for the ankle,knee and hip, P<0.0001]. The effect of movement dura-tion was large only in the loading for the hip [F(1,123)=20.5, P<0.0001] whereas for the ankle [F(7,123)=4.0, P=0.047] and knee [F(1, 123)=13.1,P=0.0004] it was smaller. For the amplitude conditions
in backward bending (Fig. 7), the effect of subject wasalso highly significant in all three loadings [F(2,47)=160.1, 415.0 and 445.2 respectively for the ankle,knee and hip, P<0.0001]. The effect of amplitude wassignificant in the loadings for the ankle [F(1, 47)=101.7,P<0.0001] and knee [F(1, 47)=28.7, P<0.0001], whereasfor hip loading it was not significant [F(1, 47)=0.8,P=0.39].
Characteristics of PC1 factor (time dependent factorscaling the time course of the movement)
The time course of PC1 (PC1 factor) was rather stereo-typed across the trials and monotonic under both fastand slow conditions (Figs. 8, 9).The duration of PC1 av-eraged across all the subjects under the fast movementconditions was 0.8�0.2 s in forward bending and0.7�0.1 s in backward bending. Similarly to the durationof the movement, the PC1 duration increased in the slowseries. Under slow conditions it amounted to 1.9�0.3 s inforward bending and to 2.0�0.3 s in backward bending. Ineach subject the increase in the mean PC1 duration in theslow versus fast series was highly significant (P<0.0001).
The amplitude of PC1 on average across all the seriesunder high-amplitude conditions was 57��9� in forwardbending and 43��11� in backward bending. The compar-ison between high and low movement amplitude condi-tions for three subjects showed that their mean amplitudeof PC1 decreased in parallel with the amplitude of themovement from 63��12� to 40��10� in forward bendingand from 53��3� to 35��8� in backward bending. The de-crease in the mean PC1 amplitude was highly significantin each subject (P<0.0001).
As an illustration of intercondition modifications in thePC1 time course under various movement conditions,
Fig. 6 Backward upper trunkbending: CG shifts and loadingsof PC1 in fast and slow move-ments with high amplitude. Notethe low SD for the loadings
Fig. 7 Backward upper trunk bending: CG shifts and loadings ofPC1 in fast movements with high and low amplitude. Note thelow SD for the loadings

216
Fig. 10 represents the PC1 factor in three trials performedunder different instructions in forward bending (subjectS1). The changes in movement amplitude and durationare reflected in the respective changes in the amplitudeand duration of the PC1 and those of its velocity profile,whereas interjoint coordination described by the set offixed ratios between changes of the angles (PC1 loadings)remains approximately the same under all the movementconditions (Figs.4, 5, subject S1).
Characteristics of PC2
In forward bending PC2 related mainly to the knee jointkinematics, reflecting a slight initial knee flexion in thefast series. The maximum PC2 in the fast series alwayscoincided in time with the maximum slight initial flexionin the knee. The knee loading in PC2 was dominant: onaverage across all the trials, the ankle, knee and hip load-ings in PC2 were respectively ±0.51�0.22, 0.80�0.13 and±0.17�0.09. The PC2 contribution to the total angularvariance showed a decrease in the slow series versus thefast series (P<0.0001): on average across all subjects,its percentage in total variance in the fast series was0.3%�0.15%, whereas in the slow series it dropped to0.1%�0.08%. In the fast series, the PC2 factor showed aregular time course: it first increased starting from ap-proximately zero level and then, at the end of the move-ment, again dropped to the zero level. In contrast, in theslow series, PC2 factor looked like irregular low-ampli-tude noise (Fig. 8, bottom). As regards the PC2 loadings,their variability also increased in the slow movements: onaverage across all subjects, the index of intertrial variabil-
Fig. 8 Forward upper trunk bending: the time courses (�SDs) of thePC1 and PC2 factors, averaged over the trial series shown in Fig. 2.In the bottom graphic, PC2 factor is shown with a �10 increase ofthe ordinate scale
Fig. 9 Backward upper trunk bending: the time courses (�SDs) ofthe PC1 factor (subject S6) and the PC2 factor (subjects S6 andS2) averaged over fast and slow series. A schematic representationof joint angle changes in the initial phase of the movement is shownat the bottom
Fig. 10 Time courses and corresponding velocity profiles of PC1factor under various experimental conditions for forward bending(subject S1): 1 fast, high amplitude, 2 fast, slow amplitude, 3 slow,high amplitude

217
ity V was 18%�7% under fast conditions and 32%�15%under slow conditions (note that the index V of intertrialvariability for PC1 loadings was, on average, only 2.5%).
Thus, in forward bending, PC2 might reflect the dy-namic disturbances in the knee joint during movement ex-ecution ± disturbances that could be expected to be moreintense under the fast movement conditions.
In backward bending, the following data show thatPC2 was relatively important for accurate representationof the hip kinematics, namely for the description of aslight delay in hip extension with respect to movementonset in the lower joints.
Firstly, on average across all subjects and conditions,the loadings of the ankle, knee and hip angles in PC2 wererespectively ±0.10�0.22, 0.49�0.19 and ±0.77�0.21showing that hip loading in PC2 was dominant.
Secondly, the amplitude of PC2 factor increased whenthe delay in hip extension with respect to ankle flexion in-creased. Figure 9 (bottom) shows the difference betweenPC2 amplitudes in two subjects who showed maximally ad-vanced (subject S6, Fig. 9, left side) and maximally delayed(subject S2, Fig. 9, right side) onsets of hip extension withrespect to the onset of movement in the ankle. The ampli-tudes of PC2 peaks versus delays in hip extension in the fastmovements are shown in Fig. 11. Across all the subjects,the correlation coefficient between the mean PC2 amplitudeand the mean delay in hip extension was 0.9.
CG shifts
The anteroposterior CG shift of a given subject is definedboth by the movement amplitude and by the relativechanges in the joint angles involved in the movement.In linear approximation, the relationship between theCG shift, DCG, and the joint angles changes is describedby the equation given in the Appendix. If the PC2 andPC3 components in (1) are negligible, then
DCG� qDx1 �4�
where coefficient
q� q1w11� q2w12� q3w13 �5�Dx1 is the amplitude of PC1 that is proportional to themovement amplitude, and w11, w12 and w13 are PC1 load-ings for the ankle, knee and hip respectively. A positivevalue of DCG corresponds to CG displacement forwardfrom the initial position. The coefficients q1, q2 and q3are defined by the anthropometry of the subject (see Ap-pendix) and represent the relative contribution to the CGshift of, respectively, the ankle, knee and hip angularchanges. Using standard anthropometric coefficients(Winter 1990), for a subject of 70 kg weight and 170 cmheight q1=1.43 cm/deg, q2=0.75 cm/deg, q3=0.17 cm/deg.In order to minimize the CG shift during the movement,the ratios between angular changes, i.e., the loadingsw1i, must be such that the value of q is close to zero.Equation (5) shows that for each individual subject�s an-thropometry this may be achieved by numerous combina-tions of PC1 loadings.
On average across all the subjects and conditions thePC1 loadings in forward bending were w11=±0.19,w12=0.12, w13=0.97 and PC1 amplitude was Da1=56�. Inbackward bending respective mean values were w11=±0.45, w12=0.67, w13=0.51 and Da1=43�. For such averagekinematic synergy, (4) and (5) estimated with standardanthropometric data give DCG=±0.56 cm in forwardbending and DCG=±2 cm in backward bending. The esti-mation thus shows that the observed synergy actually pro-vides a CG shift that is small with respect to the size ofthe support area. The experimentally measured CG shiftsin forward and backward bending were respectively1.6�4.0 cm and 1.1�4.1 cm on average across all subjectsand conditions. The large SD for the CG shift indicates itslarge intersubject and/or intertrial variability.
Due to the high intersubject differences in the PC1loadings, shown by ANOVA, the CG shifts are expectedto be different in amplitude and direction in different sub-jects. Figures 4±7 show the large intersubject variation inCG shifts. For example, fast forward movements withhigh amplitude (Fig. 4) were accompanied by forwardCG shifts in five subjects and by backward CG shifts inthree subjects. In fast backward movements with high am-plitude (Fig. 6), four subjects produced forward CG shifts,two subjects produced backward CG shifts and two sub-jects produced CG shifts close to zero.
Figures 4±7 also show the large intertrial variability inCG shift as indicated by its large SD in individual sub-jects. The large intertrial variability in CG shift is ob-served in spite of low intertrial variability of the set ofPC1 loadings because, as seen from (4) and (5), the vari-ability of DCG results both from variability in PC1 load-ings w1i (i.e., variability in interjoint coordination) andfrom variability in the amplitude Dx1 of PC1 (i.e., vari-ability in movement amplitude).
Concerning the intercondition differences, it should bementioned that as seen from (4) and (5), the CG shift, in agiven subject for a given amplitude Dx1 of PC1, is propor-tional to the coefficient q that is defined by PC1 loadings
Fig. 11 The mean amplitudes of PC2 peaks (�SDs) in the fastbackward bendings of different subjects (S1±S10) versus the meandelay of the peak angular velocity of the hip with respect to that ofthe ankle. The dashed line represents a linear regression of the data(r=0.9)

218
w11, w12 and w13. And for given PC1 loadings, it is propor-tional to the amplitude Dx1 of PC1.
Figures 4 and 6 show the intercondition differences ofCG shifts and PC1 loadings when comparing fast andslow movements with the same amplitude (i.e., with thesame amplitude of PC1). In this case one can expect thatthe change in CG shift is mainly defined by the change inPC1 loadings (ratios between angular changes) but not bythe change in PC1 amplitude. Actually, during forwardbending, in all four cases in Fig. 4 where the intercondi-tion difference in CG shift was statistically significant, itwas accompanied by statistically significant differences inPC1 loadings. Moreover, in three cases out of four achange in the loading for the ankle was present. This isin agreement with the observation that the coefficient a1related to the ankle joint in (5) is the largest. Therefore,the ankle loading predominantly influences the CG shift.Similarly, during backward bending of different durationbut the same ampitude (Fig. 6), in all three cases when theintercondition difference in CG shift was statistically sig-nificant, it resulted from a change in PC1 loadings. Sub-ject S7 showed a remarkable example of solving the prob-lem of CG stabilization by two different patterns of inter-joint coordination. In this subject, the different PC1 load-ings for the fast and slow movements produced the sameCG shift: in the slow movements, the increase in PC1loading for the knee was compensated by a decrease inPC1 loading for the hip (Fig. 6).
Figures 5 and 7 show the intercondition differences inCG shifts and PC1 loadings when comparing the move-ments with high and low amplitudes. In this case, if thePC1 loadings do not change, the CG shift is proportionalto the movement amplitude. Actually, in forward bending(Fig. 5), subject S10 showed no difference in PC1 load-ings and the CG shift was proportional to the amplitudeof PC1. Subject S1 showed no difference in CG shift:the change in movement amplitude was compensated bythe change in PC1 loading for the ankle. As a remarkableexample, subject S9 showed an ªidealº kinematic syner-gy: the ratios between changes in the joint angles ensureda movement with approximately zero CG shift [coeffi-cient a in (4) was on average close to zero]. Thus, in spiteof the change in movement amplitude, under the same in-terjoint coordination, the mean CG shift remained approx-imately zero. In backward bending with different move-ment amplitudes (Fig. 7), the simultaneous changes inmovement amplitude and PC1 loadings observed in allthree subjects resulted in different changes in CG shifts.In subject S8, the CG shift did not change: the changein amplitude was compensated by the change in interjointcoordination.
Discussion
The main result of the present analysis is that during hu-man upper trunk bending the time profile of ankle, kneeand hip angles could be reduced to the variation of onlyone parameter (PC1 factor), representing a 1-DF move-
ment with fixed ratios between changes in joint angles.PC1 accounted, on average across all subjects and condi-tions, for 99.7% of the total angular variance in forwardbending, and for 98.4% in backward bending. Althoughthe ratios between changes in joint angles were quite dif-ferent in forward and backward movements, in both casesthey ensured CG stabilization within the relatively smallsupport area delimited by the feet.
Two hypotheses could explain how a 3-DF biome-chanical system (in the framework of three-joint model)performs a 1-DF movement. According to the first hy-pothesis, it results from passive interaction between bodysegments. According to the second hypothesis, the 1-DFkinematic synergy is determined by the central commandadjusted to the individual biomechanical properties of thesubject. The following observations are in line with thesecond hypothesis:
(1) Computer simulations (Ramos and Stark 1990)showed that forward bending initiated by activation inthe hip muscles is accompanied by backward inclinationof the lower segments even without changes in the anklejoint torque. However, this inclination caused by interseg-mental mechanical coupling is too large and results in abackward fall. Thus, active regulation of ankle joint tor-que is required to maintain equilibrium during upper trunkbending. The simultaneous movement initiation in all seg-ments was indicated by the electromyogram recordings(Crenna et al. 1987; Oddsson and Thorstensson 1987).It also suggests that a central control occurs that acts onthe different segments involved in the axial synergy.
(2) In each individual subject, the ratios betweenchanges in the joint angles remained approximately thesame in most cases across different durations and ampli-tudes of the movement. This supports the hypothesis thatthe kinematic synergy is centrally controlled, because un-der different movement velocities and amplitudes, thepure mechanical interaction between segments shouldmarkedly change the intersegmental kinematics due tothe large difference in segment inertias. Moreover, obser-vations during cosmic flight (Massion et al. 1993, 1997)support the notion that a similar interjoint coordinationis preserved even in microgravity when the dynamic con-ditions change dramatically.
The central control of the kinematic synergy is adjust-ed to the subjects� individual biomechanical characteris-tics, as seen by the high intersubject variability of PC1loadings, shown by ANOVA. The two simultaneously de-sired movement goals, i.e. (a) upper trunk inclination at agiven angle with respect to vertical and (b) anteroposteri-or maintenance of CG inside the support base, were suc-cessfully achieved by all subjects in spite of large inter-subject variability in interjoint angular ratios.
Although intertrial variability of PC1 loadings wasrather weak, intercondition differences were observed inabout half the subjects. However, under each movementcondition, the goal of equilibrium maintenance wasachieved. This observation demonstrates the possibilityof solving the same task of CG stabilization by differentcombinations of angle changes. It is in line with the idea

219
of ªmotor equivalenceº suggested by Abbs and Gracco(1984), Berkinblit et al. (1986), Abbs and Cole (1987)and Jeannerod (1991). In the present study motor equiva-lence was observed under different movement conditionsand not among the different trials under a given condition.
As suggested by Bernstein (1984), the motor controlsystem seems to code the intended movement in termsof motor fields consisting of (a) the movement topologythat reflects the invariant movement features and (b) themovement metrical properties that can be easily modifiedwith respect to the motor task. PC1 loadings, describingrelative changes in the joint angles and showing invariantproperties across trials and across movement conditions,might reflect an invariant topology that is defined bythe central command in upper trunk bending. Whereasthe time course of the PC1 factor, which describes chang-es in movement amplitude and duration in accordancewith the instruction, might reflect the centrally definedmovement metrics.
In the light of this suggestion, the possible organiza-tion of the motor act could be schematically representedas in Fig. 12, similar to that proposed by Feldman andLevin (1995) for the multijoint arm movement. The gen-eralized time course of the desired movement might becoded by a scalar function g(t) that defines its amplitudeand duration. The desired movement topology might becoded in the space of joint angles by the weights vi, spec-ifying the contribution of each joint to the movement. Anindividual command for ith joint, g(t)vi, might then betransformed into the muscle forces ensuring movementexecution. In the framework of the concept of a general-ized motor program (Schmidt 1988), weights vi for a giv-en kind of movement might be regarded as invariant prop-erties of the generalized motor program. The amplitudeand duration of the central signal g(t) might be regardedas parameters required to specify the particular way inwhich the program is to be executed.
Note that due to the dynamical interactions of bodysegments and gravitational forces, the observed timecourse of the movement, given by the PC1 factor x1(t),and corresponding interjoint ratios, given by PC1 loadingsw1i, might differ from the time course of the hypotheticalcentral signal g(t) and coordination weights vi. How the
commands of the hypothetical central controller are trans-formed into the observed kinematics and what the rela-tions are between planned g(t) and actual x1(t) time cours-es and between planned vi and actual w1i weights, is aproblem of the special biomechanical analysis which iscurrently being carried out.
It is also still a matter of discussion how the individualjoint commands could be transformed into muscle forces.In the multijoint l model (Feldman and Levin 1995) thetransformation could be performed by a change in thethreshold of the stretch reflex loop. Muscle forces emergeas a result of the dynamic interaction between central con-trol, afferent feedback and biomechanical characteristicsof the system as well as the external forces.
Similarly to upper trunk bending, the planning of amultijoint movement in the form of a 1-DF motor actcould take place in the organization of other multijointmovements also. Thus, a simple linear relationship be-tween angular changes at the shoulder and elbow wasfound for arm movements (Soechting and Lacquaniti1981; Atkeson and Hollerbach 1985). In more complexmovements such as, for example, stepping over obstacles,the variation in eight angles could be well represented bythree PCs (Mah et al. 1994).
The integrated control of upper trunk movement andinterjoint coordination during the bending task is alsosimilar to the integrated control of arm transport and handorientation shown for prehension movements (Desmurgetet al. 1996), which seem to be programmed at the jointlevel in terms of joint space.
It should be noted that in the present study the role ofPC2 and especially of PC3 in the explanation of anglevariance was small compared with that of PC1. However,in fast movements the stereotyped time course of PC2 in-dicates that it is not random but mirrors some regular fea-tures of the movement. We suggest that in fast forwardmovements PC2, in contrast to PC1, could reflect the pas-sive intersegmental dynamics that might not be taken intoaccount by the central control. In fast backward move-ments, the amplitude of PC2 correlated with the delayin onset of hip extension relative to the onset of ankleand knee joint movements. This delay related to intersub-ject differences in the initiation process of the axial syn-
Fig. 12 Hypothetical organizationof the central motor control duringupper trunk bending

220
ergy. In the slow movements, either forward or backward,PC2 factor looked like irregular low-amplitude noise.
In conclusion, the PC analysis performed in the presentstudy showed that upper trunk bending in humans is exe-cuted as a 1-DF multijoint movement that simultaneouslyachieves two goals: upper trunk bending and localizationof the CG within the support area. The movement studiedseems to be planned in terms of a 1-DF command in thespace of joint angles that defines the desired time courseof the movement and fixed ratios between desired chang-es in joint angles. The results are in agreement with theidea of Bernstein (1967) that in skilled movements the re-dundancy of the number of degrees of freedom is success-fully mastered.
Acknowledgements The authors thank Jean Claude Fabre for hishelp in the experimental procedure and Roseline Aurenty for hertechnical assistance. The research was partly supported by theCNES, the International Science Foundation (project no. M9I300),INTAS (project 951-1327) and Russian Foundation of FundamentalResearch (project no. 94-04-11318). A.A. received a fellowshipfrom the French Ministry of Research and Technology.
Appendix
Relationship between CG shift and joint angles
In the linear approximation of vertical body position�j1 � p=2; j2 � j3 � p; Fig. 1), the CG shift DCG is giv-en by the joint angle changes Dji according to the equa-tions
DCG� q1Dj1� q2Dj2� q3Dj3
q1 � �m1c1��m2�m3�l1�m2c2�m3l2�m3c3�=m1�m2�m3�
q1 � �m2c2�m3l2�m3c3�=�m1�m2�m3�q3 �m3c3=�m1�m2�m3�where mi, li and ci are the mass, length and distance of thecenter of mass from the lower joint for the ith segment;i=1 for the leg and ankle, i=2 for the thigh and knee,i=3 for the upper trunk and hip.
References
Abbs JH, Cole KJ (1987) Neural mechanisms of motor equivalenceand goal achievement. In: Wise SP (ed) Higher brain functions:recent explorations of the brain�s emergent properties. Wiley,New York, pp 15±43
Abbs JH, Gracco VL (1984) Control of complex motor gestures:orofacial muscle responses to load perturbations of lip duringspeech. J Neurophysiol 51: 705±723
Atkenson CG, Hollerbach JM (1985) Kinematic features of unre-strained arm movements. J Neurosci 5: 2318±2330
Babinski J (1899) De l�asynergie cØrØbelleuse. Rev Neurol 7: 806±816
Berkinblit MB, Feldman AG, Fukson OI (1986) Adaptability of in-nate motor patterns and motor control mechanisms. Behav BrainSci 9: 585±638
Bernstein NA (1967) The co-ordination and regulation of move-ments. Pergamon Press, London
Bernstein NA (1984) The problem of interrelation of co-ordinationand localization. In: Whiting HTA (ed) Human motor actions.North-Holland, Amsterdam, pp 77±119
Crenna P, Frigo C, Massion J, Pedotti A (1987) Forward and back-ward axial synergies in man. Exp Brain Res 65: 538±548
Desmurget M, Prablanc C, Arzi M, Rossetti Y, Paulignan Y, Urqu-izar C (1996) Integrated control of hand transport and orienta-tion during prehension movements. Exp Brain Res 110: 265±278
Feldman AG, Levin MF (1995) The origin and use of positionalframes of reference in motor control. Behav Brain Sci 18:723±806
Ferrigno G, Pedotti A (1985) ELITE: a digital dedicated hardwaresystem for movement analysis via real time TV signal process-ing. IEEE Trans Biomed Eng 32: 943±950
Jeannerod M (1991) The interaction of visual and proprioceptivecues in controlling reaching movements. In: Humphrey DR,Freund J-J (eds) Motor control concepts and issues. Wiley,Chichester, pp 277±291
Mah CD, Hulliger M, Lee RG, O�Callaghan I (1994) Quantitativeanalysis of human movement synergies: constructive patternanalysis for gait. J Mot Behav 26: 83±102
Massion J, Gurfinkel V, Lipshits M, Obadia A, Popov K (1993) Ax-ial synergies under microgravity conditions. J Vestib Res 3:275±287
Massion J, Popov K, Fabre J-C, Rage P, Gurfinkel V (1997) Is theerect posture in microgravity based on the control of trunk ori-entation or center of mass position? Exp Brain Res 114: 384±389
Oddsson L, Thorstensson A (1987) Fast voluntary trunk flexionmovements in standing: motor pattern. Acta Physiol Scand129: 93±106
Ramos CF, Stark LW (1990) Postural maintenance during fast for-ward bending: a model simulation experiment determining theªreduced trajectoryº. Exp Brain Res 82: 651±657
Schmidt RA (1988) Motor control and learning: a behavioral em-phasis, 2nd edn. Human Kinetic, Champaign, Ill
Soechting JF, Lacquaniti F (1981) Invariant characteristics of apointing movement in man. J Neurosci 17: 295±311
Winter DA (1990) Biomechanics and motor control of human move-ment. Wiley, New York
Young JF, Winter DA, Wells RP (1990) Postural dynamics in thestanding human. Biol Cybern 62: 309±320
Copyright © 2022 FDOKUMEN