
Analyzing Flexibility in Design of Waste-to-Energy Systems
10
Proceedings of the 2014 Industrial and Systems Engineering Research Conference Y. Guan and H. Liao, eds. Analyzing Flexibility in Design of Waste-to-Energy Systems Qihui Xie, Michel-Alexandre Cardin, Tsan Sheng Ng, Shuming Wang, Junfei Hu Department of Industrial and Systems Engineering National University of Singapore Block E1A #06-25, 1 Engineering Drive, Singapore, 117576 Abstract Flexibility in design of waste-to-energy (WTE) systems provides ways to achieve environmental and economic sustainability under uncertainty. However, when and how to exercise the flexibility remains challenging in the face of growing uncertainty. This paper considers flexibility as a mechanism to ensure better sustainability for WTE systems with long-term lifecycles. Specifically, the flexibility of capacity expansion is considered. A multistage stochastic programming model is proposed to design a stochastically optimal decision rule to guide decision making on capacity expansion. An algorithm based on Lagrangian decomposition is developed to solve the model. Experiments show that the expected net present value (ENPV) of the flexible design provides significant improvement over the fixed rigid design in terms of economic lifecycle performance. Furthermore, by being able to make decisions in any time period based on available information as uncertainties are resolved, the proposed multistage model can achieve a higher value of flexibility than the two-stage model, which has been used in the design of flexible urban infrastructure systems. Keywords Flexibility in engineering design, real options analysis, multistage stochastic programming, waste-to-energy system, risk management 1. Introduction Municipal waste management has become a critical issue for the sustainable development of megacities due to their high population density and limited land area. Taking Singapore as an example, the total amount of municipal waste has increased from 4.7 million to 6.9 million tons per year during the last decade [1]. At the same time, energy supply has also become a challenging problem for the sustainable development of megacities. Therefore, waste-to- energy (WTE) technologies, such as anaerobic digestion (AD), are enjoying high favor due to their capability for recovering energy while efficiently disposing of waste. This paper addresses the problem of how to design manage a sustainable WTE system with a long lifespan. When one thinks about the design of large scale engineering systems like WTE systems, the traditional way is to search for optimal system configurations based on observed requirements and forecasted demands. However, because of the complexity of the environment, the future is always full of uncertainty. In traditional optimization design approaches, uncertainty is not fully recognized. Flexibility in engineering design, however, is a novel concept that provides a promising way to handle uncertainty. In general, flexibility can improve the performance of a system by reducing the risk in downside scenarios and capturing the upside opportunities. In this paper, flexibility is considered as a mechanism to improve the lifecycle performance of WTE systems. The main contribution of this paper is a multistage stochastic programming model to develop a decision rule to guide the exercise of flexibility. When a system is designed with flexibility, it is important to tell the managers when and how to exercise it to gain the added value. In this paper, the specified flexibility is capacity expansion. In the literature, the strategies of planning capacity expansion are either simply predefined without comprehensive investigation or not practical from a management perspective. The proposed model provides a way to develop stochastically optimal decision rules to guide dynamic decision making based on past information or uncertainty estimations. This dynamic planning strategy will not only improve the lifecycle performance of the system, but also make the management process more efficient and convenient.
Transcript of Analyzing Flexibility in Design of Waste-to-Energy Systems
Proceedings of the 2014 Industrial and Systems Engineering Research Conference
Y. Guan and H. Liao, eds.
Analyzing Flexibility in Design of Waste-to-Energy Systems
Qihui Xie, Michel-Alexandre Cardin, Tsan Sheng Ng, Shuming Wang, Junfei Hu
Department of Industrial and Systems Engineering
National University of Singapore
Block E1A #06-25, 1 Engineering Drive, Singapore, 117576
Abstract
Flexibility in design of waste-to-energy (WTE) systems provides ways to achieve environmental and economic
sustainability under uncertainty. However, when and how to exercise the flexibility remains challenging in the face
of growing uncertainty. This paper considers flexibility as a mechanism to ensure better sustainability for WTE
systems with long-term lifecycles. Specifically, the flexibility of capacity expansion is considered. A multistage
stochastic programming model is proposed to design a stochastically optimal decision rule to guide decision making
on capacity expansion. An algorithm based on Lagrangian decomposition is developed to solve the model.
Experiments show that the expected net present value (ENPV) of the flexible design provides significant
improvement over the fixed rigid design in terms of economic lifecycle performance. Furthermore, by being able to
make decisions in any time period based on available information as uncertainties are resolved, the proposed
multistage model can achieve a higher value of flexibility than the two-stage model, which has been used in the
design of flexible urban infrastructure systems.
Keywords Flexibility in engineering design, real options analysis, multistage stochastic programming, waste-to-energy system,
risk management
1. Introduction Municipal waste management has become a critical issue for the sustainable development of megacities due to their
high population density and limited land area. Taking Singapore as an example, the total amount of municipal waste
has increased from 4.7 million to 6.9 million tons per year during the last decade [1]. At the same time, energy
supply has also become a challenging problem for the sustainable development of megacities. Therefore, waste-to-
energy (WTE) technologies, such as anaerobic digestion (AD), are enjoying high favor due to their capability for
recovering energy while efficiently disposing of waste. This paper addresses the problem of how to design manage a
sustainable WTE system with a long lifespan.
When one thinks about the design of large scale engineering systems like WTE systems, the traditional way is to
search for optimal system configurations based on observed requirements and forecasted demands. However,
because of the complexity of the environment, the future is always full of uncertainty. In traditional optimization
design approaches, uncertainty is not fully recognized. Flexibility in engineering design, however, is a novel concept
that provides a promising way to handle uncertainty. In general, flexibility can improve the performance of a system
by reducing the risk in downside scenarios and capturing the upside opportunities. In this paper, flexibility is
considered as a mechanism to improve the lifecycle performance of WTE systems.
The main contribution of this paper is a multistage stochastic programming model to develop a decision rule to
guide the exercise of flexibility. When a system is designed with flexibility, it is important to tell the managers when
and how to exercise it to gain the added value. In this paper, the specified flexibility is capacity expansion. In the
literature, the strategies of planning capacity expansion are either simply predefined without comprehensive
investigation or not practical from a management perspective. The proposed model provides a way to develop
stochastically optimal decision rules to guide dynamic decision making based on past information or uncertainty
estimations. This dynamic planning strategy will not only improve the lifecycle performance of the system, but also
make the management process more efficient and convenient.

Xie, Cardin, Ng, Wang, Hu
2. Background and Related Work
2.1. Flexibility and Real Options
Flexibility is an important system attribute that enables engineering systems to change easily in the face of
uncertainty [2]. It is associated with the concept of real options, which provide the “right, but not the obligation, to
change a system as uncertainty unfolds” [3]. It has been shown that flexibility can improve expected performance by
10% to 30% compared to standard design and evaluation approaches [4].
Designing engineering systems for flexibility can be organized into five phases: initial/standard design generation,
uncertainty recognition, concept generation and enabler identification, design space exploration, and process
management [5]. This paper proposes a methodology for exploring the design space. In literature, there are two
categories of methodologies for the design space exploration procedure. The first one is to build analytic models,
such as decision analysis [6, 7], binomial lattice [8], and stochastic programming [9, 10]. The other category is
simulation models, which explicitly model the stochastic scenarios and decisions enabled by flexible designs [11,
12] . However, both of the two types of methodologies have some limitations. In the analytic approach, all of the
decisions of flexibility exercise are determined as outcomes of the model; there are no generic decision rules to
guide managers as uncertainty is resolved throughout the lifecycle of the project. Although the simulation approach
explicitly employs generic decision rules, it lacks a systematic way to choose the most preferable decision rules.
This paper addresses the importance of decision rules for their advantages of lifecycle performance and management
practicability. A systematic method is proposed to develop stochastically optimal decision rules that will guide
dynamic decision making based on available information as uncertainties are resolved.
2.2. Capacity Expansion under Uncertainty
In traditional engineering approaches of engineering systems design, designers intend to build big systems to take
advantage of economies of scale [13]. However, these approaches ignore the stochastic nature of the demand
process, relying on the forecasting of the uncertain future. If the real demands fail to grow as anticipated, the system
will suffer a lot of loss because a large amount of initial investments will be wasted. The flexibility of capacity
expansion, however, enables systems to keep good performance in face of the uncertainties. The main idea of this
strategy is to start with a small system and expand when the time is ripe. It can benefit the system reducing the
negative effects in downside scenarios and better capturing upside opportunities.
Once a system has been embedded with the flexibility to expand, the key problems are to decide the initial capacity,
the time periods to expand, and the amount of capacity to be expanded at each time. In the literature, there are
typically two categories of approaches to address the capacity expansion problem: stochastic programming and
simulation.
Of the studies that have applied stochastic programming to flexibility design problems [9, 10, 14], the models
applied to multi-period capacity expansion problems are generally static planning models which consist of only two
stages. The first stage includes the decisions on capacity expansion for each time period, which have to be made
without knowing the outcome of the uncertainties. The second stage is the realization of some other variables that
occur after the uncertainties have been revealed. It is easy to see that the formulation does not fully follow a rational
process because it forces the decision maker to plan the capacities for all time periods before realizing any of the
uncertainties. A more realistic formulation would be a multistage problem in which the capacity in each time period
is decided over time as the uncertainties are resolved, as a way to flexibly adapt to changing conditions.
Simulation, which models stochastic scenarios and decision making, is another technology used to study flexible
design in engineering systems. De Neufville, Scholtes [12] built a simulation model based on a spreadsheet to
quantify the value of flexibility in the public parking garage capacity expansion problem. In that model, a decision
rule was exploited to capture the management’s decision making process in response to the observed demand
scenario. Decision rules are used to determine when and how to exercise the flexibility in operations, in light of
some observation regarding the main uncertainty sources. They are crucial to the lifecycle value assessment of
flexible design alternatives [15]. However, since simulation cannot naturally be used to find an optimal solution, it is
unable to systematically develop the most preferable decision rule.
In this paper, a multistage stochastic programming model is proposed to systematically develop decision rules that
will guide the decision making process of capacity expansion exploiting ideas of flexibility. In this model, the
Xie, Cardin, Ng, Wang, Hu
sequential decisions are made based on past information about uncertainties in every time period. By being able to
take advantage of information over time, the system can achieve a better lifecycle performance. In particular, the
outcome of the model consists of a simple strategic decision rule under which managers can easily make
sophisticated decisions based on available information. This characteristic improves practicability in the
management process.
2.3. Waste-to-Energy Systems
Municipal solid waste management is becoming a major issue in the sustainable development of megacities. In the
face of increasing waste and limited landfill sites, WTE technologies, which generate energy in the form of
electricity and/or heat from waste, are enjoying high favor due to their capability of recovering energy while
efficiently disposing of waste. Various WTE technologies are promising in terms of offering electricity, heat, and
transport fuels [16]. To support decision making in the design and choice of WTE technologies, the existing
literature related to WTE systems has mainly focused on system optimization and evaluation [17-19]. Little research
has been done to analyze WTE systems from the perspective of flexibility, specifically as a mechanism to ensure
better sustainability. This paper targets at the issues of considering flexibility for WTE systems and managing the
decision making process during the implementation of such flexible systems. A multistage stochastic programming
model is developed to guide decision making when the system is implemented in an uncertain future. It is argued
that explicitly considering uncertainty and flexibility will result in the better use of resources by planning for careful
adaption to changing environments. Overall, this should contribute to a more resilient and sustainable system.
3. Methodology This paper aims to address the problem of when and how to exercise the flexibility. The steps below describe the
process in generic terms to analyze WTE systems for flexibility.
Step 1: Initial Analysis
The first step analyzes the design problem. The lifecycle performance of the system is measured using an economic
model which is built based on some assumptions on the cost and revenue drivers. The initial analysis is developed
by assuming deterministic values of the uncertainties and fixed design variables.
Step 2: Uncertainty Analysis
In the second step, the lifecycle performance of the design is evaluated under uncertainties. After investigating the
historical data, the main uncertainties drivers are modelled using stochastic functions like Geometric Brownian
Motion (GBM), S-curve function, etc. Monte Carlo simulation is then applied to generate a number of possible
scenarios of uncertainties. By substituting different scenarios into the economic model developed in step 1, the
performance of the design under uncertainties can be evaluated based on expected net present value (ENPV).
Step 3: Flexibility Analysis
This step will focus on flexible concepts to handle the uncertainties. The WTE system is assumed to be embedded
with the flexibility to be expanded modularly as needed. Stochastic programming models are built to decide the
optimal system design configurations and decision rules. First, a two-stage stochastic programming model is
introduced as a representative of the static planning models used in many existing studies. Then, a multistage
stochastic programming model is proposed to develop a stochastically optimal decision rule to guide dynamic
decision making on capacity expansion. Due to the large scale of the proposed multistage model, an algorithm based
on Lagrangian decomposition is developed to solve it. The performances of the models are then compared through
an out-of-sample test. Finally, a sensitivity analysis is conducted to test the influence of uncertainties on the
performance of the models.
4. Application
4.1. Initial Analysis
Due to the increasing waste generation and decreasing landfill space, Singapore is facing more and more pressure on
the issue of municipal waste management. Anaerobic digestion (AD), which has high efficiency in the energy
recovery process and has been widely used in European countries, is one of the potential solutions to remedy the
situation. This study aims to investigate how to embed and manage flexibility in an upcoming AD plant that treats
organic waste – wood, paper, horticultural, and organic waste – in Singapore. First, a deterministic case is studied,

Xie, Cardin, Ng, Wang, Hu
i.e. assuming the amount of waste processed in each year, 𝑤𝑡 , is accurately forecasted. The problem of optimizing
the capacity 𝑐 to achieve the maximum net present value can be formulated as below:
Problem DA: 𝑧𝐷𝐴 = max ∑ 𝜎𝑡(𝑅𝑡(𝑤𝑡) − 𝐶𝑡(𝑐, 𝑤𝑡) − 𝑃𝑡(𝑓𝑡))𝑇𝑡=0 (1)
s.t. 𝑐 + 𝑓𝑡 ≥ 𝑤𝑡 , ∀𝑡 (2)
𝑐 ≥ 0, 𝑓𝑡 ≥ 0, ∀𝑡 (3)
where 𝜎 is the discount rate factor, 𝑅𝑡(𝑤𝑡) is the revenue function in year t, 𝐶𝑡(𝑐, 𝑤𝑡) is the cost function in year 𝑡,
𝑓𝑡 is the capacity shortage in year 𝑡 and 𝑃𝑡(𝑓𝑡) is the corresponding penalty of capacity shortage.
The AD plant makes revenue, 𝑅𝑡(𝑤𝑡), by selling electricity and compost, as well as the tipping fee from the
customers. The cost of the plant, 𝐶𝑡(𝑐, 𝑤𝑡) , mainly includes transportation, capacity installation, land rental,
maintenance, labor and waste disposal cost. It is important to point out that, once the actual amount of waste
collected is larger than the current capacity, a capacity shortage, 𝑓𝑡, will occur and trigger a penalty 𝑃𝑡(𝑓𝑡). The
rationale is that the plant has to pay extra fees to dispose the unprocessed waste in landfill.
4.2. Uncertainty Analysis
The deterministic model relies on the forecasting of the amount of waste collected. However, the forecasting is
always not accurate. In this step, two main sources of uncertainty are considered: the amount of organic waste and
the recycling rate. The amount of organic waste generated in year t, 𝑤𝑔𝑡, is modeled using GBM. The recycling rate
of organic waste in year t, 𝑟𝑡, is modeled by a stochastic S-curve function. The amount of waste that can be collected
by the AD plant, 𝑤𝑡 , can be represented by the product of 𝑤𝑔𝑡 and 𝑟𝑡, i.e.
𝑤𝑡 = 𝑤𝑔𝑡𝑟𝑡 (4)
Based on the assumption of the uncertainty factors, K scenarios of uncertainties data are generated using Monte
Carlo simulation. Assume each scenario has a probability of 𝑃𝑘 . Let 𝑤𝑡𝑘 represent the amount of organic waste
collected by the AD plant in year t in scenario 𝑘, the baseline inflexible problem can be reformulated as below:
Problem BSI: 𝑍𝐵𝑆𝐼 = max ∑ 𝑃𝑘 (∑ 𝜎𝑡 (𝑅𝑡𝑘(𝑤𝑡
𝑘) − 𝐶𝑡𝑘(𝑐, 𝑤𝑡
𝑘) − 𝑃𝑡𝑘(𝑓𝑡
𝑘))𝑇𝑡=0 )𝐾
𝑘=1 (5)
s.t. 𝑐 + 𝑓𝑡𝑘 ≥ 𝑤𝑡
𝑘 , ∀𝑡 (6) 𝑐 ≥ 0, 𝑓𝑡
𝑘 ≥ 0, ∀𝑘, 𝑡 (7)
Here 𝑍𝐵𝑆𝐼 represents the ENPV of the system under uncertainties. By using the data of AD plant operation
described in [20] and solving problem BSI under 𝐾 = 100 scenarios of uncertainty and, the resulted ENPV of the
system is 𝑍𝐵𝑆𝐼 = $27.3 million for T = 10 years. The problem DA can be solved to optimal with 𝑧𝐷𝐴 =$32.9 million. The comparison of the results shows that the deterministic model overestimates the value of the
system by ignoring the uncertainty. This finding can be explained by “Flaw of Averages”, which means that relying
on the most likely or average scenario may lead to incorrect design selection and investment decisions [21]. It is
because that the response of the designs under different scenarios is nonlinear, i.e., the output from an upside
scenario does not necessarily balance the output from a downside scenario.
4.3. Flexibility Analysis
4.3.1. Model Formulation
Since the uncertainties have been shown to have crucial influence on the performance of the system in Section 4.2,
they must be explicitly considered in the design process. By assuming the system with the flexibility of capacity
expansion, the design space must be explored for the most valuable design configurations and decision rules to
expand. Different stochastic models are built under the assumption that the AD plant is modularly designed, i.e., it
can expand the capacity by units of modules.
Two-stage Model
In the two-stage model, an initial capacity 휀c𝑈 is installed and a plan for capacities in every year is decided in the
initial phase. Once the system is deployed, the capacities plan does not change no matter what the actual realizations
of the uncertainties are. Let 𝑐𝑡 be the decision variable representing the number of modules installed in year 𝑡 and c𝑀
be the maximum number of modules allowed to be installed. The two-stage model can then be formulated as below:
Problem TSF: max ∑ 𝑃𝑘 (∑ 𝜎𝑡 (𝑅𝑡𝑘(𝑤𝑡
𝑘) − 𝐶𝑡𝑘(𝑐𝑡 , 𝑤𝑡
𝑘) − 𝑃𝑡𝑘(𝑓𝑡
𝑘))𝑇𝑡=0 )𝐾
𝑘=1 (8)
s.t. 𝑐𝑡c𝑈 + 𝑓𝑡𝑘 ≥ 𝑤𝑡
𝑘, 𝑡 = 1,2, … , 𝑇, ∀k (9)

Xie, Cardin, Ng, Wang, Hu
𝑐0 = 휀 (10)
𝑐𝑡 ≤ c𝑀, ∀t, k (11) 𝑐𝑡 ≥ 𝑐𝑡−1, 𝑡 = 1,2, … , 𝑇, ∀k (12)
c𝑀, 휀 ∈ 𝑁 (13)
𝑐𝑡 ∈ 𝑁, 𝑓𝑡𝑘 ≥ 0 , ∀t, k (14)
In the above formulation, the constraint (10) defines the initial capacity, constraint (11) forces the capacity installed
to be less than the maximum capacity c𝑀 , and constraint (12) indicates that the capacity installed will not be
abandoned. It is important to point out that there is not any decision rule in the two-stage model since the capacity in
every time period is planned before the implementation of the system.
Multistage Model
In the multistage setting, the uncertain data is revealed gradually over time in 𝑇 periods and the decisions can be
adapted to this process [22]. The values of capacity 𝑐𝑡𝑘, chosen at stage t in scenario 𝑘, depends on information about
the uncertainties, 𝜃𝑡𝑘 , available up to time 𝑡. 𝜃𝑡
𝑘 contains the realization of uncertainties up to time t, i.e. 𝜃𝑡𝑘 =
(𝑤1𝑘 , … 𝑤𝑡−1
𝑘 ). The decision making process has the following form:
𝑑𝑒𝑐𝑖𝑠𝑖𝑜𝑛(𝑐1𝑘) → 𝑜𝑏𝑠𝑒𝑟𝑣𝑎𝑡𝑖𝑜𝑛(𝜃2
𝑘) → 𝑑𝑒𝑐𝑖𝑠𝑖𝑜𝑛(𝑐2𝑘) … → 𝑜𝑏𝑠𝑒𝑟𝑣𝑎𝑡𝑖𝑜𝑛(𝜃𝑇
𝑘) → 𝑑𝑒𝑐𝑖𝑠𝑖𝑜𝑛(𝑐𝑇𝑘)
The main advantage of the proposed multistage stochastic programming model is that it provides an explicit
decision rule. A decision rule 𝛿 is a mapping from the set of uncertainty realizations up to time 𝑡 to the decision
space. It can be described as a function of the current capacity and realization of uncertainties in past years, i.e.:
𝑐𝑡𝑘 = 𝛿(𝑐𝑡−1
𝑘 , 𝜃𝑡𝑘) (15)
The objective of this method is to explore different types of decision rules and find the most preferable 𝛿, as well as
its corresponding parameters. For demonstration purposes, a simple decision rule is considered in this paper: in time
period 𝑡, if the observed amount of waste collected in the last year is more than a certain threshold (i.e.( 𝑐𝑡−1𝑘 −
𝛼)𝑐𝑈), then expand the capacity by 𝛽𝑐𝑈. The decision rule variables are 𝛼 and 𝛽. Here, α represents the severity
level of the current capacity, a higher α means the decision maker is keener to expand capacity to prevent capacity
shortage; and β represents the scale of each expansion. The rule can be realized through the following constraints:
𝑤𝑡−1𝑘 − (c𝑡−1
𝑘 − 𝛼)c𝑈 ≥ 𝑀(𝑒𝑡𝑘 − 1), t=1,2…T,∀ k (16)
𝑤𝑡−1𝑘 − (c𝑡−1
𝑘 − 𝛼)c𝑈 ≤ 𝑀𝑒𝑡𝑘, 𝑡 = 1,2 … 𝑇, ∀ 𝑘 (17)
ℎ𝑡𝑘 ≤ 𝛽𝑐𝑈, 𝑡 = 1,2 … 𝑇, ∀ 𝑘 (18)
ℎ𝑡𝑘 ≥ (𝑒𝑡
𝑘 − 1)𝑀 + 𝛽𝑐𝑈, 𝑡 = 1,2 … 𝑇, ∀ 𝑘 (19)
ℎ𝑡𝑘 ≤ 𝑒𝑡
𝑘𝑀, 𝑡 = 1,2 … 𝑇, ∀ 𝑘 (20)
c𝑡𝑘𝑐𝑈 = c𝑡−1
𝑘 𝑐𝑈 + ℎ𝑡𝑘 , 𝑡 = 1,2 … 𝑇, ∀ 𝑘 (21)
where 𝑀 is a large enough number, 𝑒𝑡𝑘 is a binary variable indicating whether to expand in year 𝑡 in scenario 𝑘, and
ℎ𝑡𝑘 is the amount of capacity added. When the waste amount in year 𝑡 − 1 reaches a certain threshold, i.e. (𝑐𝑡−1
𝑘 −𝛼)𝑐𝑈 , (16) and (17) will force 𝑒𝑡
𝑘 =1, which means the flexibility of expanding capacity should be exercised.
Meanwhile, (18), (19), and (20) will force ℎ𝑡𝑘 to be equal to c𝑈𝛽𝑘, the amount of capacity to be added. Finally, (21)
ensures that the capacity is expanded. Conversely, when the waste amount in the previous year is less than the
threshold, 𝑒𝑡𝑘 will be equal to 0 and the capacity will not be expanded.
By explicitly expressing the decision rule, the model can be formulated as problem MSF:
Problem MSF: 𝑍MSF = 𝑚𝑎𝑥 ∑ 𝑃𝑘 (∑ 𝜎𝑡 (𝑅𝑡𝑘(𝑤𝑡
𝑘) − 𝐶𝑡𝑘(𝑐𝑡 , 𝑤𝑡
𝑘) − 𝑃𝑡𝑘(𝑓𝑡
𝑘))𝑇𝑡=0 )𝐾
𝑘=1 (22)
s.t. (16) - (21) and −c𝑡
𝑘 + c𝑀 ≥ 0, ∀𝑡, 𝑘 (23)
c0𝑘 − 휀 = 0, ∀𝑘 (24)
c𝑈c𝑡𝑘+𝑓𝑡
𝑘 ≥ 𝑤𝑡𝑘, 𝑡 = 1,2, … , 𝑇, ∀𝑘 (25)
ℎ𝑡𝑘 ≥ 0, 𝑓𝑡
𝑘 ≥ 0, 𝑒𝑡𝑘 ∈ {0, 1} , ∀t, k (26)
c𝑀, 휀 ∈ 𝑁; 𝛼, 𝛽 ∈ 𝑍 (27)
The outcome of this model consists of two parts. The first part is the initial system design variables, 휀 and 𝑐𝑀, which
determine the initial capacity and the maximum capacity. The second part is the decision rule variables, α and β,
which guide managers to decide when and how to expand the capacity.

Xie, Cardin, Ng, Wang, Hu
4.3.2. Solution Procedure and Computational Experiments
Lagrangian Decomposition
It can be seen that the problem MSF is a mixed integer linear program (MILP). The number of constraints and
decision variables increase exponentially as the number of scenarios considered increases. An MILP of such a large
scale is not solvable in modest time. Therefore, the solution method calls for a decomposition technique. The
structure of the model suggests the Lagrangian decomposition where each scenario is solved independently, as the
decisions are made only based on the past information in that scenario. It is to see that the different scenarios are
linked by the variables 𝐶𝑚, 휀, 𝛼, 𝑎𝑛𝑑 𝛽, which are decided at the very beginning of the project to ensure that the
initial designs and decision rules are constant in every scenario. Identical copies of these linking decision variables,
𝐶𝑚𝑘, 휀𝑘, 𝛼𝑘, 𝑎𝑛𝑑 𝛽𝑘, are created and one of these copies is used in one subproblem. At the same time, the following
linking constraints are added as conditions that the copies of the linking decision variables are identical.
𝛽1 − 𝛽𝑘 = 0 , 𝑘 ≠ 1 (28)
𝛼1 − 𝛼𝑘 = 0, 𝑘 ≠ 1 (29)
c𝑀1 − c𝑀
𝑘 = 0, 𝑘 ≠ 1 (30)
휀1 − 휀𝑘 = 0, 𝑘 ≠ 1 (31)
These constraints are further dualized by introducing a vector of Lagrange multipliers, 𝜆𝑘 , 𝜇𝑘 , 𝜈𝑘 , 𝑎𝑛𝑑 𝜉𝑘, so the
model can be decomposed into subproblems that can be solved independently. This will result in the following
decomposable problems (LR):
Problem LR: 𝑍LR = 𝑚𝑎𝑥 ∑ 𝑃𝑘 (∑ 𝜎𝑡 (𝑅𝑡𝑘(𝑤𝑡
𝑘) − 𝐶𝑡𝑘(𝑐𝑡
𝑘 , 𝑤𝑡𝑘) − 𝑃𝑡
𝑘(𝑓𝑡𝑘))𝑇
𝑡=0 )𝐾𝑘=1 + ∑ (𝜆𝑘(𝛽1 − 𝛽𝑘+1) +𝐾−1
𝑘=1
𝜇𝑘(𝛼1 − 𝛼𝑘+1) + 𝜈𝑘(c𝑀1 − c𝑀
𝑘+1) + 𝜉𝑘(ε1 − ε𝑘+1)) (32) s.t. (20), (21), (25) and
𝑤𝑡−1𝑘 − (c𝑡−1
𝑘 − 𝛼𝑘)c𝑈 ≥ 𝑀(𝑒𝑡𝑘 − 1), t=1,2…T,∀ k (33)
𝑤𝑡−1𝑘 − (c𝑡−1
𝑘 − 𝛼𝑘)c𝑈 ≤ 𝑀𝑒𝑡𝑘, 𝑡 = 1,2 … 𝑇, ∀ 𝑘 (34)
ℎ𝑡𝑘 ≤ 𝛽𝑘𝑐𝑈, 𝑡 = 1,2 … 𝑇, ∀ 𝑘 (35)
ℎ𝑡𝑘 ≥ (𝑒𝑡
𝑘 − 1)𝑀 + 𝛽𝑘𝑐𝑈, 𝑡 = 1,2 … 𝑇, ∀ 𝑘 (36)
−c𝑡𝑘 + c𝑀
𝑘 ≥ 0, ∀𝑡, 𝑘 (37)
c0𝑘 − 휀𝑘 = 0, ∀𝑘 (38)
ℎ𝑡𝑘 , 𝑓𝑡
𝑘 ≥ 0, 𝑒𝑡𝑘 ∈ {0, 1} , ∀t, k (39)
c𝑀𝑘 ≥ 0, 휀𝑘 ∈ 𝑁, 𝛼𝑘 ∈ 𝑍, 𝛽𝑘 ∈ 𝑍, ∀k (40)
Problem LR can be further decomposed into 𝐾 scenario subproblems 𝐿𝑅𝑘 which can be solved very efficiently.:
Problem 𝐿𝑅𝑘: 𝑍LR𝑘 = max (∑ 𝜎𝑡 (𝑅𝑡𝑘(𝑤𝑡
𝑘) − 𝐶𝑡𝑘(𝑐𝑡
𝑘 , 𝑤𝑡𝑘) − 𝑃𝑡
𝑘(𝑓𝑡𝑘))𝑇
𝑡=0 + 𝐻𝜇𝑘𝛼𝑘 + 𝐻𝜆
𝑘𝛽𝑘 + 𝐻𝜈𝑘𝑐𝑀
𝑘 +
𝐻𝜉𝑘휀𝑘) (41)
where 𝐻𝜇𝑘 , 𝐻𝜆
𝑘 , 𝐻𝜈𝑘 , 𝑎𝑛𝑑 𝐻𝜉
𝑘are suitable coefficients consisting of the Lagrange multipliers corresponding to
𝛼𝑘, 𝛽𝑘, 𝑐𝑀𝑘, 𝑎𝑛𝑑 휀𝑘 respectively.
It is clear that 𝑍LR = ∑ 𝑍LR𝑘𝐾𝑘=1 constitutes an upper bound to 𝑍MSF for any 𝜆𝑘 , 𝜇𝑘, 𝜈𝑘 , 𝜉𝑘 [23]. Therefore,
approaching the optimum of problem MSF from above is equivalent to solving the following dual problem:
Problem LD: 𝑍𝐿𝐷 = min𝜆,𝜇,𝜈,𝜉
𝑍LR (42)
Theoretically, if all the constraints are convex and all the variables are continuous, the optimum of 𝐿𝐷 will be equal
to the optimum of 𝑀𝑆𝐹. However, a duality gap may exist due to the existence of the integer decision variables.
This means that the optimum of 𝐿𝐷 will be strictly larger than the optimum of 𝑀𝑆𝐹. Therefore, the aim of this
section is to obtain a good upper bound of 𝑀𝑆𝐹 by solving 𝐿𝐷 with a subgradient method. A heuristic method can
then be used to generate feasible solutions to 𝑀𝑆𝐹, which are lower bounds.
A subgradient method is used to search for 𝑍𝐿𝐷 because it has an empirically good performance [24]. In this method,
given initial values, a sequence of multiplier values {𝜆𝑖 , 𝜇𝑖, 𝜈𝑖 , 𝜉𝑖} is generated by the following rule (in the example
of 𝜆, the other multipliers are the same way):
𝜆𝑘𝑖+1 = 𝜆𝑘
𝑖 + 𝑡𝑖(𝛽1𝑖
− 𝛽𝑘𝑖) (43)

Xie, Cardin, Ng, Wang, Hu
where 𝛽1𝑖 and 𝛽𝑘
𝑖 are the optimal solution to LR with the multipliers set to 𝜆𝑘
𝑖 and 𝑡𝑖 is a scalar step size in the 𝑖𝑡ℎ
iteration. For the choice of step size 𝑡𝑖, the most commonly used strategy is adopted [23]:
𝑡𝑖 =𝜌𝑖(𝑍𝐿𝑅(𝜆𝑖,𝜇𝑖,𝜈𝑖,𝜉𝑖)−𝑍∗)
∑((𝛽1𝑖−𝛽𝑘
𝑖)2
+(𝛼1𝑖−𝛼𝑘
𝑖)2
+(c𝑀1
𝑖−c𝑀𝑘
𝑖)2
+(𝜀1𝑖−𝜀𝑘
𝑖)2
) (44)
where 𝑍∗ is the value of the best known feasible solution to model 𝑀𝑆𝐹, which is obtained using a heuristic method;
𝑍𝐿𝑅(𝜆𝑖 , 𝜇𝑖, 𝜈𝑖 , 𝜉𝑖) is the optimal solution to the problem 𝐿𝑅 with multipliers set to 𝜆𝑖 , 𝜇𝑖 , 𝜈𝑖 , 𝜉𝑖 , and the scalar 𝜌𝑖 is
chosen between 0 and 2 and halved whenever 𝑍𝐿𝑅(𝜆𝑖 , 𝜇𝑖, 𝜈𝑖 , 𝜉𝑖) fails to decrease in a fixed number of iterations.
The solution procedure mainly consists of two components: obtaining a good upper bound using a subgradient
method and postulating a feasible solution as a best lower bound from the solutions of 𝐿𝑅. The algorithm can be
summarized as the following steps:
Initialize the multipliers by setting 𝜆𝑘0 = 𝜇𝑘
0= 𝜈𝑘
0 = 𝜉𝑘0
= 0. Denote RMSF as the problem with the
integer requirement on the binary variables problem MSF be relaxed. Solve RMSF and let 𝑍∗ = 𝑍RMSF.
Solve the subproblems LR𝑘. Obtain an upper bound 𝑍𝐿𝑅(𝜆𝑖 , 𝜇𝑖, 𝜈𝑖 , 𝜉𝑖) = ∑ 𝑍LR𝑘𝐾𝑘=1 . Retain the best upper
bound found so far.
Postulate a feasible set of decision variables, (𝛼, 𝛽, 𝑐𝑀, 휀), based on the solutions to the subproblems.
Substitute them into the original problem MSF to get a feasible solution, which yields a lower bound 𝑍∗.
Update the multipliers using the solutions obtained in step 2 and the lower bound obtained in step 3, by (43)
and (44). Then go to step 2.
Because solving the dual to optimality is not guaranteed, the search is terminated after a predetermined number of
iterations. In the present work, the limit is 20 iterations because experiments have shown this allows one to obtain a
good solution in modest computational time.
The algorithm is implemented in C++ by calling CPLEX to solve problems LR𝑘 and 𝑅𝑀𝑆𝐹. After running it on a
DELL workstation to solve the problem with a size of 100 scenarios and 10 year periods, it turns out that the
algorithm is able to get feasible solutions with a duality gap of 9%. Furthermore, Table 1 shows that the algorithm is
capable of efficiently solving large size problems that are not solvable using the CPLEX MIP solver.
Table 1: Comparison of the results for 10 years
No. of scenarios
CPLEX proposed algorithm
NPV
($, million)
solution time
(s)
NPV
($, million)
solution time
(s)
10 23.7 2 23.6 46
50 N/A* N/A 26.5 212
100 N/A N/A 25.2 481
*N/A means the problem is not solvable within considerable computational time
Computational Experiments
An out-of-sample test is conducted to compare the results of the two stochastic programming models for the flexible
design, as well as the model for the baseline inflexible design. Three simulation models are built to represent the
operation process of the AD plant under capacity plans resulting from the three optimization models. The outcomes
of the optimization models, i.e. the value of the initial design variables, the capacity plan, and the decision rule
variables, are then input to the simulation models. In each experiment, 10,000 scenarios of uncertainty data are
generated using the same technique as in the optimization models. After running 20 replications, the average ENPV
and the value of flexibility, which suggests the discounted profit of the flexible designs compared to the baseline
inflexible design, are measured to see whether the proposed multistage model MSF can improve the lifecycle
performance of the system. The values of flexibility are defined below:
𝑉𝑎𝑙𝑢𝑒 𝑜𝑓 𝐹𝑙𝑒𝑥𝑖𝑏𝑖𝑙𝑖𝑡𝑦𝑇𝑆𝐹 = 𝐸𝑁𝑃𝑉𝑇𝑆𝐹 − 𝐸𝑁𝑃𝑉𝐵𝑆𝐼 (45)
𝑉𝑎𝑙𝑢𝑒 𝑜𝑓 𝐹𝑙𝑒𝑥𝑖𝑏𝑖𝑙𝑖𝑡𝑦𝑀𝑆𝐹 = 𝐸𝑁𝑃𝑉𝑀𝑆𝐹 − 𝐸𝑁𝑃𝑉𝐵𝑆𝐼 (46)
Table 2 shows the results of this experiment. As can been seen, based on the inflexible model, the optimal capacity
to be installed is 240 tons per day. It will finally generate an ENPV of $20.0 million. The two-stage model results in
a capacity installation plan which starts with 1 module (30 tons per day) and eventually expands to 13 modules (390
Xie, Cardin, Ng, Wang, Hu
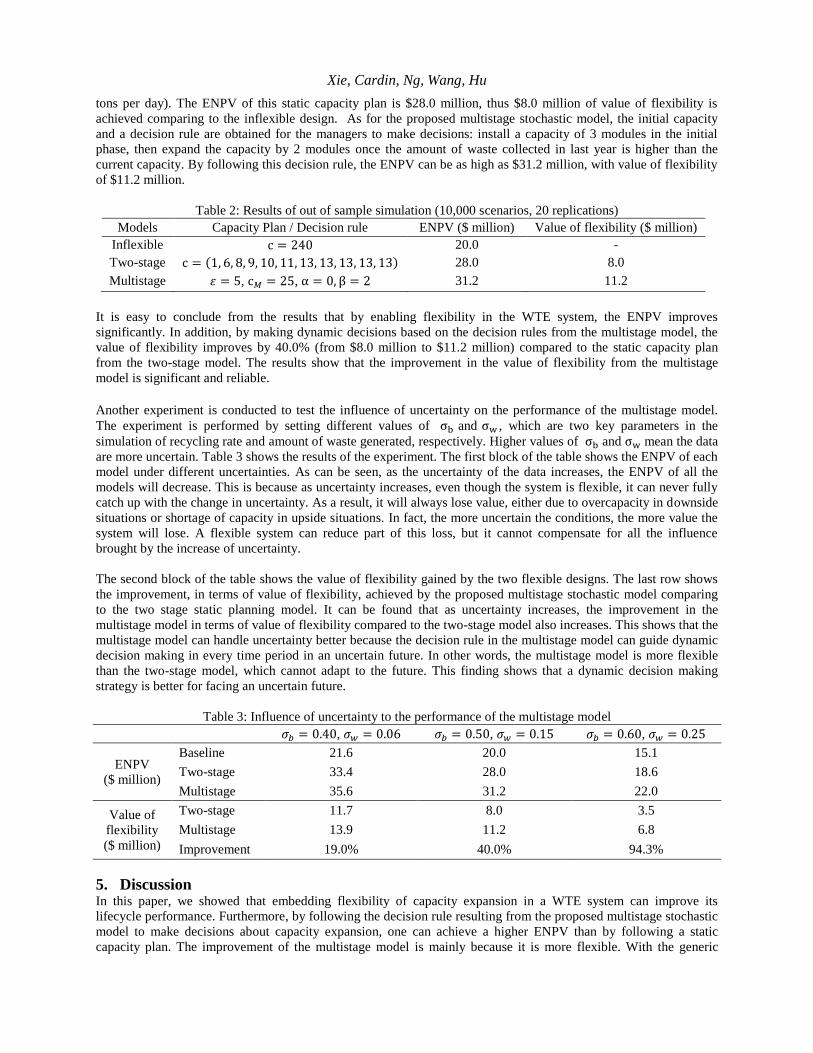
tons per day). The ENPV of this static capacity plan is $28.0 million, thus $8.0 million of value of flexibility is
achieved comparing to the inflexible design. As for the proposed multistage stochastic model, the initial capacity
and a decision rule are obtained for the managers to make decisions: install a capacity of 3 modules in the initial
phase, then expand the capacity by 2 modules once the amount of waste collected in last year is higher than the
current capacity. By following this decision rule, the ENPV can be as high as $31.2 million, with value of flexibility
of $11.2 million.
Table 2: Results of out of sample simulation (10,000 scenarios, 20 replications)
Models Capacity Plan / Decision rule ENPV ($ million) Value of flexibility ($ million)
Inflexible c = 240 20.0 -
Two-stage c = (1, 6, 8, 9, 10, 11, 13, 13, 13, 13, 13) 28.0 8.0
Multistage 휀 = 5, c𝑀 = 25, α = 0, β = 2 31.2 11.2
It is easy to conclude from the results that by enabling flexibility in the WTE system, the ENPV improves
significantly. In addition, by making dynamic decisions based on the decision rules from the multistage model, the
value of flexibility improves by 40.0% (from $8.0 million to $11.2 million) compared to the static capacity plan
from the two-stage model. The results show that the improvement in the value of flexibility from the multistage
model is significant and reliable.
Another experiment is conducted to test the influence of uncertainty on the performance of the multistage model.
The experiment is performed by setting different values of σb and σw , which are two key parameters in the
simulation of recycling rate and amount of waste generated, respectively. Higher values of σb and σw mean the data
are more uncertain. Table 3 shows the results of the experiment. The first block of the table shows the ENPV of each
model under different uncertainties. As can be seen, as the uncertainty of the data increases, the ENPV of all the
models will decrease. This is because as uncertainty increases, even though the system is flexible, it can never fully
catch up with the change in uncertainty. As a result, it will always lose value, either due to overcapacity in downside
situations or shortage of capacity in upside situations. In fact, the more uncertain the conditions, the more value the
system will lose. A flexible system can reduce part of this loss, but it cannot compensate for all the influence
brought by the increase of uncertainty.
The second block of the table shows the value of flexibility gained by the two flexible designs. The last row shows
the improvement, in terms of value of flexibility, achieved by the proposed multistage stochastic model comparing
to the two stage static planning model. It can be found that as uncertainty increases, the improvement in the
multistage model in terms of value of flexibility compared to the two-stage model also increases. This shows that the
multistage model can handle uncertainty better because the decision rule in the multistage model can guide dynamic
decision making in every time period in an uncertain future. In other words, the multistage model is more flexible
than the two-stage model, which cannot adapt to the future. This finding shows that a dynamic decision making
strategy is better for facing an uncertain future.
Table 3: Influence of uncertainty to the performance of the multistage model
𝜎𝑏 = 0.40, 𝜎𝑤 = 0.06 𝜎𝑏 = 0.50, 𝜎𝑤 = 0.15 𝜎𝑏 = 0.60, 𝜎𝑤 = 0.25
ENPV
($ million)
Baseline 21.6 20.0 15.1
Two-stage 33.4 28.0 18.6
Multistage 35.6 31.2 22.0
Value of
flexibility
($ million)
Two-stage 11.7 8.0 3.5
Multistage 13.9 11.2 6.8
Improvement 19.0% 40.0% 94.3%
5. Discussion In this paper, we showed that embedding flexibility of capacity expansion in a WTE system can improve its
lifecycle performance. Furthermore, by following the decision rule resulting from the proposed multistage stochastic
model to make decisions about capacity expansion, one can achieve a higher ENPV than by following a static
capacity plan. The improvement of the multistage model is mainly because it is more flexible. With the generic

Xie, Cardin, Ng, Wang, Hu
decision rule, the model enables managers to easily decide the capacity until the uncertainties of previous years are
known. In contrast, the static capacity plan tells managers how to deploy the capacity throughout the system’s
lifespan before knowing any of the uncertainties realization. Since the plan is designed to achieve the highest
average performance among all possible scenarios in the future, it may perform poorly in some extreme scenarios.
Therefore, the multistage model can improve the overall performance of the system.
Although we have shown that the proposed capacity expansion strategy can achieve significant performance
improvements, there are some limitations to this paper. First, the problem MSF is solved by using a Lagrangian
decomposition algorithm to find an upper bound and a lower bound. Since the duality gap obtained is about 9%, this
means that taking the lower bound as the solution cannot guarantee optimality. Therefore, a heuristic method is
needed to polish a better solution between the bounds. One possible way is to use Bender’s decomposition with the
current best solution to solve to optimum. However, this procedure may be very time consuming. In this paper, we
do not include this procedure. Since a solution with a duality gap of 9% has already shown that the proposed model
can significantly improve the lifecycle performance of the system, the optimal solution would, of course, provide an
even better performance. Therefore, such a suboptimal solution is sufficient for the purposes of this paper.
Another limitation of this paper is that it only makes comparison between the proposed model and a two-stage static
planning model. A further comparison could be made with the classic multistage stochastic model. In the classic
multistage stochastic models, uncertainty is modeled as a scenario tree in which each path represents a scenario. The
outcome of the model includes individual capacity expansion plans for each scenario. It is worth mentioning that the
proposed model is a special case of the classic multistage stochastic model: if the constraints of the decision rule are
relaxed, and so is the equality of the initial design variables, then the model will become a classic multistage model.
It is easy to see that the optimal objective value, the ENPV, of the multistage stochastic model will be larger than in
the proposed model, which means that it can provide a better theoretical performance.
However, the decision rule from the proposed model has advantage in management practice. To follow the results of
the classic multistage stochastic models, it requires the managers to approximate the realization of uncertainties to a
sample path in the modelling. This procedure is not an easy task in management practice. In contrast, in the
proposed multistage model things are much easier for managers: they do not need to identify the path, they only
need to follow the simple decision rule, i.e. expand the capacity by a certain amount if the observed uncertainty
realization in last year reaches a certain threshold. In other words, the decision making is independent from any time
period or uncertainty scenario. Simplicity of the decision making process is important in management practice as a
complicated process may be opposed by managers. Thus, the proposed model has an advantage when the system is
implemented in reality. This argument can be verified by a simulation game in which experiments are conducted by
having people simulate the decision making process, similar to the methodology of Cardin, Yue [25]. Therefore, a
future work can be to compare the performance of the proposed multistage stochastic model and a classic multistage
stochastic model, both in theory and in practice.
6. Conclusion In this paper, flexibility is considered as a mechanism to improve the lifecycle performance of WTE systems. The
problem of managing the exercise of the embedded flexibility was addressed, i.e. when and how to expand the
capacity. A multistage stochastic programming model was proposed to develop stochastically optimal decision rules
to guide decision making on capacity expansion. The model was solved using an algorithm based on Lagrangian
decomposition. The experimental results showed that, by embedding flexibility of capacity expansion, the lifecycle
performance of the WTE system could be improved significantly. Furthermore, the proposed multistage stochastic
model outperformed other models in providing a more sophisticated strategy for the capacity expansion process.
Some future work is possible to extend the current study. The single site WTE system considered in this paper is
merely one component of a decentralized WTE system in which multiple AD plants in different locations are
implemented simultaneously as a network. In a multiple site system, more types of flexibility have to be considered,
e.g. flexibility for different plants to exchange the feedstock. In addition, more patterns of decision rules should be
examined to make the decision process more sophisticated. The current decision rule is the simplest one, which only
looks at information about the waste amount in the previous year; a simple extension can be to observe information
from the past few years. Additionally, in the context of a multiple site system, the decision rule should be able to
deal with multiple types of flexibility in multiple plants simultaneously.
Xie, Cardin, Ng, Wang, Hu
Acknowledgements This research is funded by the National Research Foundation (NRF), Prime Minister’s Office, Singapore under its
Campus for Research Excellence and Technological Enterprise (CREATE) programme.
References 1. NEA, Singapore waste statistics. 2011.
2. Fricke, E. and A.P. Schulz, Design for changeability (DfC): Principles to enable changes in systems
throughout their entire lifecycle. Systems Engineering, 2005. 8(4).
3. Trigeorgis, L., Real Options: Managerialflexibility and Strategy Inresource Allocation. 1996: the MIT
Press.
4. De Neufville, R. and S. Scholtes, Flexibility in engineering design. 2011: The MIT Press.
5. Cardin, M.-A., Enabling Flexibility in Engineering Systems: A Taxonomy of Procedures and a Design
Framework. Journal of Mechanical Design, 2013. 136(1): p. 011005-011005.
6. Cardin, M.-A., et al., Minimizing the economic cost and risk to Accelerator-Driven Subcritical Reactor
technology. Part 2: The case of designing for flexibility. Nuclear Engineering and Design, 2012. 243: p.
120-134.
7. Babajide, A., R. de Neufville, and M.-A. Cardin, Integrated method for designing valuable flexibility in oil
development projects. SPE Projects, Facilities & Construction, 2009. 4(2): p. 3-12.
8. De Neufville, R., Lecture Notes and Exercises in ESD.71: Engineering Systems Analysis for Design. 2008,
Massachusetts Institute of Technology: Cambridge, MA, United States.
9. Zhao, T. and C.-L. Tseng, Valuing flexibility in infrastructure expansion. Journal of infrastructure systems,
2003. 9(3): p. 89-97.
10. Mak, H.-Y. and Z.-J.M. Shen, Stochastic programming approach to process flexibility design. Flexible
Services and Manufacturing Journal, 2010. 21(3-4): p. 75-91.
11. Deng, Y., et al., Valuing flexibilities in the design of urban water management systems. Water Research,
2013.
12. De Neufville, R., S. Scholtes, and T. Wang, Real options by spreadsheet: parking garage case example.
Journal of infrastructure systems, 2006. 12(2): p. 107-111.
13. Manne, A.S., Investments for Capacity Expansion: Size, Location, and Time-Phasing. Vol. 5. 1967: MIT
Press.
14. Laguna, M., Applying robust optimization to capacity expansion of one location in telecommunications
with demand uncertainty. Management Science, 1998. 44(11-Part-2): p. S101-S110.
15. Cardin, M.-A., Facing reality: design and management of flexible engineering systems. 2007,
Massachusetts Institute of Technology.
16. Münster, M. and H. Lund, Comparing Waste-to-Energy technologies by applying energy system analysis.
Waste management, 2010. 30(7): p. 1251-1263.
17. Tin, A.M., et al., Cost—benefit analysis of the municipal solid waste collection system in Yangon,
Myanmar. Resources, conservation and recycling, 1995. 14(2): p. 103-131.
18. Xu, Y., et al., SRFILP: a stochastic robust fuzzy interval linear programming model for municipal solid
waste management under uncertainty. Journal of Environmental Informatics, 2009. 14(2): p. 72-82.
19. Feo, G.D. and C. Malvano, The use of LCA in selecting the best MSW management system. Waste
management, 2009. 29(6): p. 1901-1915.
20. Hu, J., et al., An approach to generate flexibility in engineering design of sustainable waste-to-energy
systems, in International Conference on Engineering Design. 2013: Seoul, Korea.
21. Savage, S., The flaw of averages: Why we underestimate risk in the face of uncertainty. Hoboken. 2009, NJ:
Wiley.
22. Shapiro, A., D. Dentcheva, and A.P. Ruszczyński, Lectures on stochastic programming: modeling and
theory. Vol. 9. 2009: SIAM.
23. Fisher, M.L., The Lagrangian relaxation method for solving integer programming problems. Management
science, 2004. 50(12 supplement): p. 1861-1871.
24. Held, M., P. Wolfe, and H.P. Crowder, Validation of subgradient optimization. Mathematical programming,
1974. 6(1): p. 62-88.
25. Cardin, M.-A., et al. Simulation Gaming to Study Design and Management Decision-Making in Flexible
Engineering Systems. in IEEE International Conference on Systems, Man, and Cybernetics, Manchester,
United Kingdom. 2013.




















