
An L 1 adaptive closed-loop guidance law for an orbital injection problem
10
http://pii.sagepub.com/ Control Engineering Engineers, Part I: Journal of Systems and Proceedings of the Institution of Mechanical http://pii.sagepub.com/content/223/6/753 The online version of this article can be found at: DOI: 10.1243/09596518JSCE789 2009 223: 753 Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering J Roshanian, M Zareh, H H Afshari and M Rezaei adaptive closed-loop guidance law for an orbital injection problem 1 An L Published by: http://www.sagepublications.com On behalf of: Institution of Mechanical Engineers can be found at: Engineering Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Additional services and information for http://pii.sagepub.com/cgi/alerts Email Alerts: http://pii.sagepub.com/subscriptions Subscriptions: http://www.sagepub.com/journalsReprints.nav Reprints: http://www.sagepub.com/journalsPermissions.nav Permissions: http://pii.sagepub.com/content/223/6/753.refs.html Citations: by guest on July 12, 2011 pii.sagepub.com Downloaded from
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of An L 1 adaptive closed-loop guidance law for an orbital injection problem

http://pii.sagepub.com/Control Engineering
Engineers, Part I: Journal of Systems and Proceedings of the Institution of Mechanical
http://pii.sagepub.com/content/223/6/753The online version of this article can be found at:
DOI: 10.1243/09596518JSCE789
2009 223: 753Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control EngineeringJ Roshanian, M Zareh, H H Afshari and M Rezaei
adaptive closed-loop guidance law for an orbital injection problem1An L
Published by:
http://www.sagepublications.com
On behalf of:
Institution of Mechanical Engineers
can be found at:EngineeringProceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and ControlAdditional services and information for
http://pii.sagepub.com/cgi/alertsEmail Alerts:
http://pii.sagepub.com/subscriptionsSubscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
http://pii.sagepub.com/content/223/6/753.refs.htmlCitations:
by guest on July 12, 2011pii.sagepub.comDownloaded from

An L1 adaptive closed-loop guidancelaw for an orbital injection problemJ Roshanian, M Zareh*, H H Afshari, and M Rezaei
Department of Aerospace Engineering, K.N. Toosi University of Technology, Tehran, Iran
The manuscript was received on 12 April 2009 and was accepted after revision for publication on 11 June 2009.
DOI: 10.1243/09596518JSCE789
Abstract: The current paper presents the determination of a closed-loop guidance law for anorbital injection problem using two different approaches and, considering the existing time-optimal open-loop trajectory as the nominal solution, compares the advantages of the twoproposed strategies. In the first method, named neighbouring optimal control (NOC), theperturbation feedback method is utilized to determine the closed-loop trajectory in ananalytical form for the non-linear system. This law, which produces feedback gains, is ingeneral a function of small perturbations appearing in the states and constraints separately.The second method uses an L1 adaptive strategy in determination of the non-linear closed-loop guidance law. The main advantages of this method include characteristics such asimprovement of asymptotic tracking, guaranteed time-delay margin, and smooth controlinput. The accuracy of the two methods is compared by introducing a high-frequencysinusoidal noise. The simulation results indicate that the L1 adaptive strategy has a betterperformance than the NOCmethod to track the nominal trajectory when the noise amplitude isincreased. On the other hand, the main advantage of the NOC method is its ability to solve anon-linear, two-point, boundary-value problem in the minimum time.
Keywords: L1 adaptive control, optimal control, optimal guidance
1 INTRODUCTION
Optimal formulations of non-linear dynamic sys-
tems, either through dynamic programming or
variational approaches, lead to non-linear partial
differential equations. Numerical solution of such
equations dealing with complex non-linear systems
is always difficult, especially for real-world physical
problems. Obtaining closed-loop control laws in-
tensifies the inherent difficulty involved and is only
exceptionally determined in some rare cases. Be-
sides, open-loop control laws, dependent on initial
conditions, are highly sensitive to noise and external
disturbances and therefore are not preferred for real-
world applications. On the contrary, closed-loop
control policies are desirable owing to their natural
robustness to perturbations. In addition, there exist
certain difficulties associated with the numerical
determination of open-loop optimal control solu-
tions for non-linear systems, such as slow conver-
gence rate and high sensitivity to initial guessti-
mates.
The technique of neighbouring optimal control
(NOC) produces time-variant feedback control that
minimizes a performance index to second order for
perturbation from a nominal optimal path. Pertur-
bations in the nominal optimal states are compen-
sated for, but errors in the system dynamic model
parameters, such as mass variation and environment
disturbance, may substantially affect the perfor-
mance. Also, the neighbouring extremals are given
for orbital injection [1]. The time-optimal solution of
a non-linear landing mission in polar coordinates
was investigated utilizing a numerical technique
named linear programming. This law is an exact
solution to the two-point boundary-value problem
associated with the necessary conditions for first
variation [2]. The results of minimum-time feedback
laws [3] are used to validate the results of an
*Corresponding author: Department of Aerospace Engineering,
K.N. Toosi University of Technology, East Vafadar Street, 4th
Tehranpars Square, Tehran 1656983211, Iran.
email: [email protected]
753
JSCE789 Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering
by guest on July 12, 2011pii.sagepub.comDownloaded from

analytical open-loop strategy proposed in the present
paper. Jardin and Bryson used the technique of NOC
to develop an algorithm for optimizing aircraft tra-
jectories in general wind fields by computing time-
varying linear feedback gains [4, 5]. Furthermore,
Pourtakdoust et al. presented a time-optimal open-
loop strategy for a non-linear lunar landing mission
using an analytical technique. To create closed-loop
fuzzy guidance logic, a fuzzy algorithm was augmen-
ted to the variational function of the problem [6, 7].
Palma and Magni have worked on optimal predictive
control by discretizing non-linear dynamic systems
[8]. Recently, Afshari et al. employed analytical
approaches to obtain non-linear optimal guidance
policies of spacecraft missions [9, 10].
There are many reasons why researchers prefer
adaptive laws to find control signals, especially for
non-linear problems for which an analytical solution
is barely possible. Uncertainties in the system,
disturbances, and measurement noise are some of
these reasons. The L1 adaptive strategy has recently
been introduced by Cao and Hovakimyan [11–13].
This new approach presents much better results,
especially during the transient phase. As proved
previously, it can provide robust performance
against external disturbances and measurement
noises. The other advantages of L1 adaptive archi-
tecture, such as improved asymptotic tracking and
guaranteed time-delay margin, achieved via smooth
control input, have also been discussed previously.
The L1 adaptive control approach replaces the
conventional model reference adaptive control
(MRAC) by first specifying an equivalent companion
model architecture, which enables insertion of a
low-pass filter in the closed loop. To ensure
asymptotic stability of the closed-loop system, the
L1 gain of the cascaded system involving the low-
pass filter and the desired closed-loop reference
system needs to be less than the inverse of the upper
bound on the unknown parameters used in the
projection-type adaptation law [14–18]. The present
study demonstrates the first usage of L1 adaptive
control in the determination of a closed-loop
guidance law for spacecraft missions. For this
purpose, the selected companion model should
track the optimal trajectory with the optimal control
signal considered as the reference input. To have a
smooth input signal, a low-pass filter is utilized by
satisfying the L1 small gain theorem [19–21].
2 OPEN- VERSUS CLOSED-LOOP SOLUTION
Optimal control of non-linear dynamic systems will
typically be of open-loop type, usually determined as
a function of time, u(t). An optimal control policy is
designed to move the system from its initial state
x(0) towards the specified terminal hypersurface,
y xtf ,tf� �
~0, in a manner that minimizes the cost
function. In this sense any point on the computed
trajectory from [x(t0),t0] to the terminal hypersurface
could be a possible initial point for which optimal
control is already at hand, but for other initial points
not lying on the predetermined trajectory, the
current policy would no longer be optimal and the
problem must be solved again. Bearing in mind the
open-loop nature of the control history in non-linear
optimal control problems, one can easily justify the
need for many solutions linked to various initial
conditions. To overcome this problem, a family of
optimal trajectories is needed to envelop all of the
feasible initial conditions, a task not easily accom-
plished. Generally speaking, for each initial condi-
tion [x(t0),t0] there exists an optimal trajectory to
arrive at the specified target hypersurface. The
corresponding control history u0(t) can be expressed
as
u0~u0 x,tð Þ ð1Þ
which is now in the so-called closed-loop form. This
means that the optimal control action is a function
of state x(t) and current time t. For a stationary
system having performance measures and con-
straints that are not explicit functions of time, the
optimal control will also be an implicit function of
time, namely
u0~u0 xð Þ ð2Þ
However, determination of closed-loop optimal
control policies for non-linear systems is a formid-
able task. Moreover, if one desires the advantages
associated with closed-loop policies, simplifying
assumptions must be made to linearize the system
around some working conditions [6].
3 OPEN-LOOP SOLUTION TO THE SPACECRAFTINJECTION PROBLEM
In this section, the results of an analytical time-
optimal solution obtained for a spacecraft injection
mission are utilized. In this way, consider an
idealized spacecraft at the origin of inertial frame
(x,y) at t5 0, moving under the action of a constant
propulsive force making a control angle b with the
horizon. Obviously, the position and velocity vector
of the vehicle will change due to the forces acting
754 J Roshanian, M Zareh, H H Afshari, and M Rezaei
Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering JSCE789
by guest on July 12, 2011pii.sagepub.comDownloaded from

upon it. Based on Fig. 1, the governing non-dimen-
sional equations are
d�uu
dt~w1 cos �bb
d�vv
dt~w1 sin �bb{w2
d�yy
dt~w3�vv
8>>>>>><>>>>>>:
ð3Þ
where w1, w2, and w3 are constant non-dimensional
multipliers [6]. Also, the non-dimensional boundary
conditions for soft landing on the moon surface are
�uu t~0ð Þ~0, �vv t~0ð Þ~0, �yy t~0ð Þ~0
�uu t~tfð Þ~1, �vv t~tfð Þ~0, �yy t~tfð Þ~1
ð4Þ
Next, by using the calculus of variation theory and
an analytical strategy [1, 2, 6], the optimal thrust
angle and state trajectories can be found in the
following form
tf~2:2113, �bb0~1:422 rad, �bbf~{1:2748 rad
ð5Þ
�bb~tan{1 6:671{4:5tð Þ ð6Þ
�uu bð Þ~0:577{0:222ln secbztanbð Þ ð7Þ
�vv bð Þ~0:0741|{13:57 cos b{ sin bz3
cos bð8Þ
�yy bð Þ~{0:223 tan bz0:025 ln sec bz tan bð Þz0:025 tan b sec b{0:008 sec2 bz0:689 ð9Þ
It should be noted that the above results are in the
open-loop form and considered the nominal optimal
solution. In section 4, this solution is utilized for a
mass-varying spacecraft; in fact, the optimal para-
meters mentioned in equations (5) to (9) are
assumed as reference parameters.
4 APPLICATION OF NOC LAW INDETERMINATION OF THE CLOSED-LOOPSOLUTION
The NOC law [1] allows development of the closed-
loop optimal guidance law. In order to determine the
perturbation thrust angle, first the coefficient ma-
trices A, B, and C are computed using the existing
relationships in reference [1] in the following form
A tð Þ~0 0 0
0 0 0
0 1 0
264
375
B tð Þ~4:523 cos b
sin2 b { sin b cos b 0
{ sin b cos b cos2 b 0
0 0 0
264
375
C tð Þ~03|3
ð10Þ
The general form of NOC law is
du tð Þ~{ f Tu S{RQ{1RT� �
zHux
� ��dx
zf Tu RQ{1dy�H{1
uu ?
~{L1 tð Þdx{L2 tð Þdy ð11Þ
where R(t), S(t), and Q(t) are unknown matrices.
Having obtained A(t), B(t), and C(t), it is possible to
determine R(t) as discussed in reference [1]
dR3|3
dt~
0 0 0
{R31 {R32 {R33
0 0 0
264
375
Fig. 1 Geometry of the injection mission
An L1 adaptive closed-loop guidance law 755
JSCE789 Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering
by guest on July 12, 2011pii.sagepub.comDownloaded from
R tfð Þ~I3|3 ð12Þ
Each member of the matrix equation (12) forms a
differential equation that must be integrated back-
wards from the terminal time to the current time.
Due to the fact that the thrust angle b(t) is related to
time, the matrix Q(t) can be easily determined by
solving a set of independent differential equations
with corresponding boundary conditions in the
following form
Therefore, Q(t) is obtained analytically by backward
integration from each member of matrix differential
equation (13) with respect to time. In effect, the
differential equations are swept backwards from the
terminal condition to the current condition in the
exact solution.
Since the co-state equations are not functions of
state variables, the matrix S(t) is equal to zero and
solving the Riccati equation is not required. Note
that because the spacecraft injection problem is in
the class of a terminal guidance problem, the
perturbation on terminal constraints will be equal
to zero. As a result, the NOC law is a function of
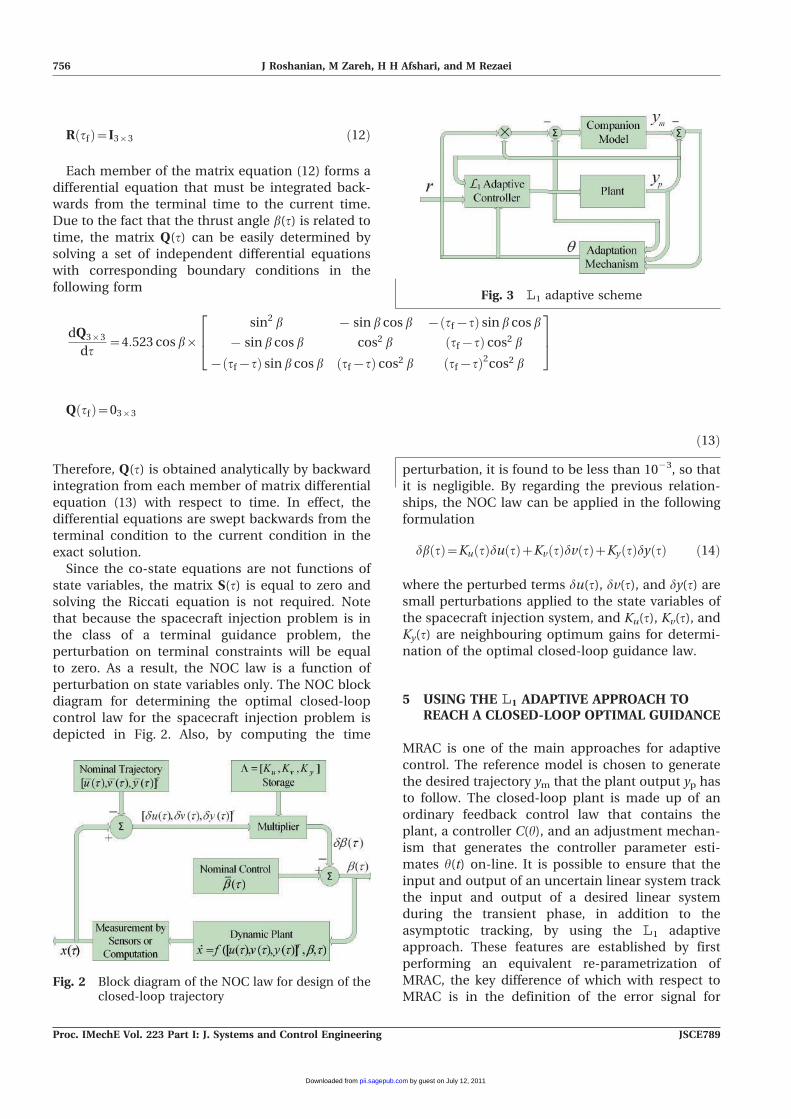
perturbation on state variables only. The NOC block
diagram for determining the optimal closed-loop
control law for the spacecraft injection problem is
depicted in Fig. 2. Also, by computing the time
perturbation, it is found to be less than 1023, so that
it is negligible. By regarding the previous relation-
ships, the NOC law can be applied in the following
formulation
db tð Þ~Ku tð Þdu tð ÞzKv tð Þdv tð ÞzKy tð Þdy tð Þ ð14Þ
where the perturbed terms du(t), dv(t), and dy(t) are
small perturbations applied to the state variables of
the spacecraft injection system, and Ku(t), Kv(t), and
Ky(t) are neighbouring optimum gains for determi-
nation of the optimal closed-loop guidance law.
5 USING THE L1 ADAPTIVE APPROACH TOREACH A CLOSED-LOOP OPTIMAL GUIDANCE
MRAC is one of the main approaches for adaptive
control. The reference model is chosen to generate
the desired trajectory ym that the plant output yp has
to follow. The closed-loop plant is made up of an
ordinary feedback control law that contains the
plant, a controller C(h), and an adjustment mechan-
ism that generates the controller parameter esti-
mates h(t) on-line. It is possible to ensure that the
input and output of an uncertain linear system track
the input and output of a desired linear system
during the transient phase, in addition to the
asymptotic tracking, by using the L1 adaptive
approach. These features are established by first
performing an equivalent re-parametrization of
MRAC, the key difference of which with respect to
MRAC is in the definition of the error signal for
dQ3|3
dt~4:523 cos b|
sin2 b { sin b cos b { tf{tð Þ sin b cos b
{ sin b cos b cos2 b tf{tð Þ cos2 b{ tf{tð Þ sin b cos b tf{tð Þ cos2 b tf{tð Þ2cos2 b
264
375
Q tfð Þ~03|3
ð13Þ
Fig. 2 Block diagram of the NOC law for design of theclosed-loop trajectory
Fig. 3 L1 adaptive scheme
756 J Roshanian, M Zareh, H H Afshari, and M Rezaei
Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering JSCE789
by guest on July 12, 2011pii.sagepub.comDownloaded from

adaptive laws. This new architecture, called the
companion model adaptive controller (CMAC),
allows for incorporation of a low-pass filter into the
feedback loop that enables one to enforce the
desired transient performance by increasing the
adaptation gain [12]. A block diagram of this method
is shown in Fig. 3. To describe the idea, consider an
imaginary spacecraft parallel to a real one that with
an optimal control signal produces an optimal
trajectory. So if the adaptation mechanism is able
to reduce the tracking error e5 yp2 ym to zero, then
the real spacecraft will behave like the imaginary one
and so will track the optimal trajectory. By reformu-
lating equation (3) we have
_XX~f X ,bð Þ ð15Þ
where X5 [u v y]. Now consider the following
reference model dynamics that satisfies the optimal
trajectory
_XXm~f � Xm,bcð Þ ð16Þ
where Xm5 [um vm ym] and bc is not like that of
conventional MRAC, being defined by a CMAC
structure as follows
bc~b{hTX ð17Þ
The aim of L1 adaptive control is to find b as a
function of states such that the input and output of
the system track the input and output of a desired
system during the transient phase, in addition to the
asymptotic tracking. To reach this end, a low-pass
filter is added to the control signal
b~FLP b�zhTX� � ð18Þ
where FLP{b* + hTX} denotes a low-pass filter. The
vector h contains adaptation parameters. By defining
deviation between the real output and the desired
output as
e~Xm{X ð19Þ
gives
_ee~f � Xm,bcð Þ{f X ,bð Þ ð20Þ
Let the adaptation parameters vector be such that
f~sf � ð21Þ
where
s~
h1 0 0
0 h2 0
0 0 h3
264
375
If the error goes to zero then it is clear that
h5 [1,1,1]T. So we define
h�~ 1,1,1½ �T
By this definition one can obtain from equation (20)
that
_ee~ I{sð Þf �
in which I363 is the unique matrix. Now matrices
A363 and B361 are defined so that A is Hurwitz, (A, B)
is controllable, and
_ee~AezB XT~hh� � ð22Þ
where h5 h2 h*. Consider the Lyapunov function as
follows
V~1
2ePez
~hhT~hh
c
!ð23Þ
where P is a 363 matrix and c is a real constant
scalar. To have a stable system dv/dt must be
negative. Differentiating from equation (23), one
obtains ATP +PA52Q in which Q is positive definite
and
_hh~{cProj e,XBTP� � ð24Þ
Proj(?) denotes the projection operator [22].
6 RESULTS AND DISCUSSION
The time histories of neighbouring optimal feedback
gains for the orbital injection problem are depicted
in Fig. 4. Having obtained these gains, the time-
optimal closed-loop control solution can be com-
puted using equation (14). By observing the plots in
Fig. 4, it can be easily seen that the NOC law is able
to satisfy the required boundary conditions. The
perturbed thrust angle for protecting the launched
spacecraft against environment disturbances is
depicted in Fig. 5.
An L1 adaptive closed-loop guidance law 757
JSCE789 Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering
by guest on July 12, 2011pii.sagepub.comDownloaded from
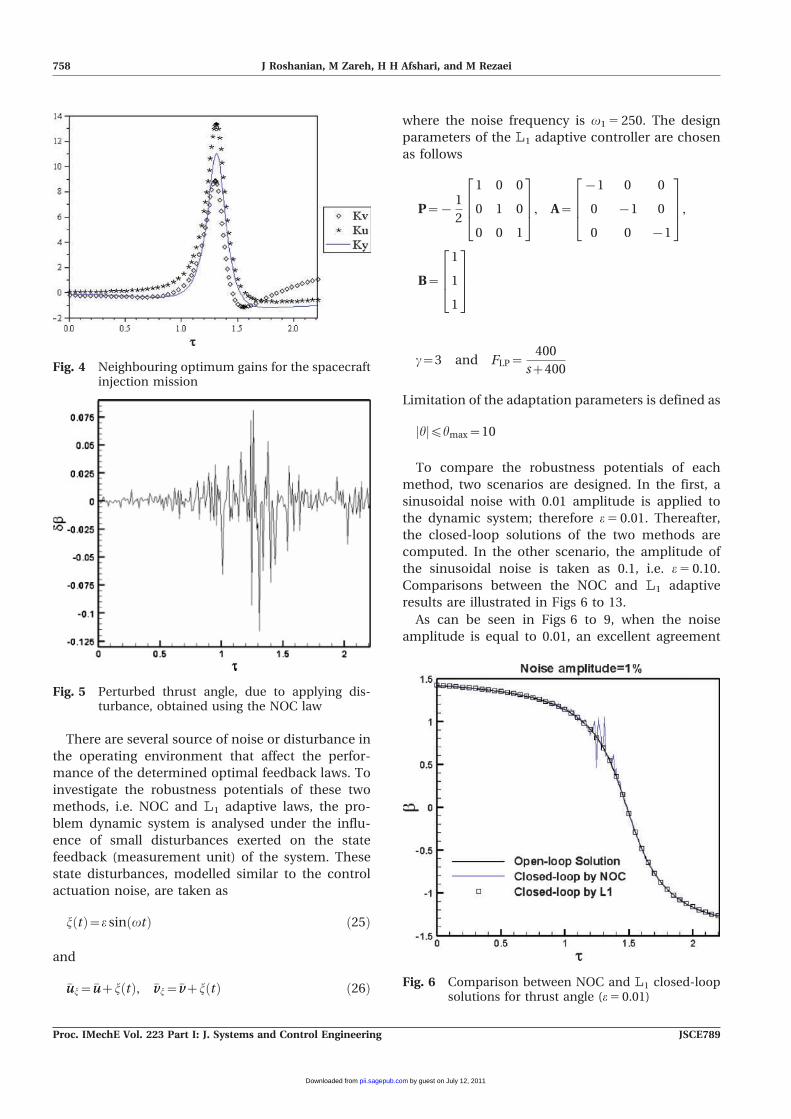
There are several source of noise or disturbance in
the operating environment that affect the perfor-
mance of the determined optimal feedback laws. To
investigate the robustness potentials of these two
methods, i.e. NOC and L1 adaptive laws, the pro-
blem dynamic system is analysed under the influ-
ence of small disturbances exerted on the state
feedback (measurement unit) of the system. These
state disturbances, modelled similar to the control
actuation noise, are taken as
j tð Þ~e sin vtð Þ ð25Þ
and
�uuj~�uuzj tð Þ, �vvj~�vvzj tð Þ ð26Þ
where the noise frequency is v15 250. The design
parameters of the L1 adaptive controller are chosen
as follows
P~{1
2
1 0 0
0 1 0
0 0 1
2664
3775, A~
{1 0 0
0 {1 0
0 0 {1
2664
3775,
B~
1
1
1
26643775
c~3 and FLP~400
sz400
Limitation of the adaptation parameters is defined as
hj j¡hmax~10
To compare the robustness potentials of each
method, two scenarios are designed. In the first, a
sinusoidal noise with 0.01 amplitude is applied to
the dynamic system; therefore e5 0.01. Thereafter,
the closed-loop solutions of the two methods are
computed. In the other scenario, the amplitude of
the sinusoidal noise is taken as 0.1, i.e. e5 0.10.
Comparisons between the NOC and L1 adaptive
results are illustrated in Figs 6 to 13.
As can be seen in Figs 6 to 9, when the noise
amplitude is equal to 0.01, an excellent agreement
Fig. 4 Neighbouring optimum gains for the spacecraftinjection mission
Fig. 5 Perturbed thrust angle, due to applying dis-turbance, obtained using the NOC law
Fig. 6 Comparison between NOC and L1 closed-loopsolutions for thrust angle (e5 0.01)
758 J Roshanian, M Zareh, H H Afshari, and M Rezaei
Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering JSCE789
by guest on July 12, 2011pii.sagepub.comDownloaded from
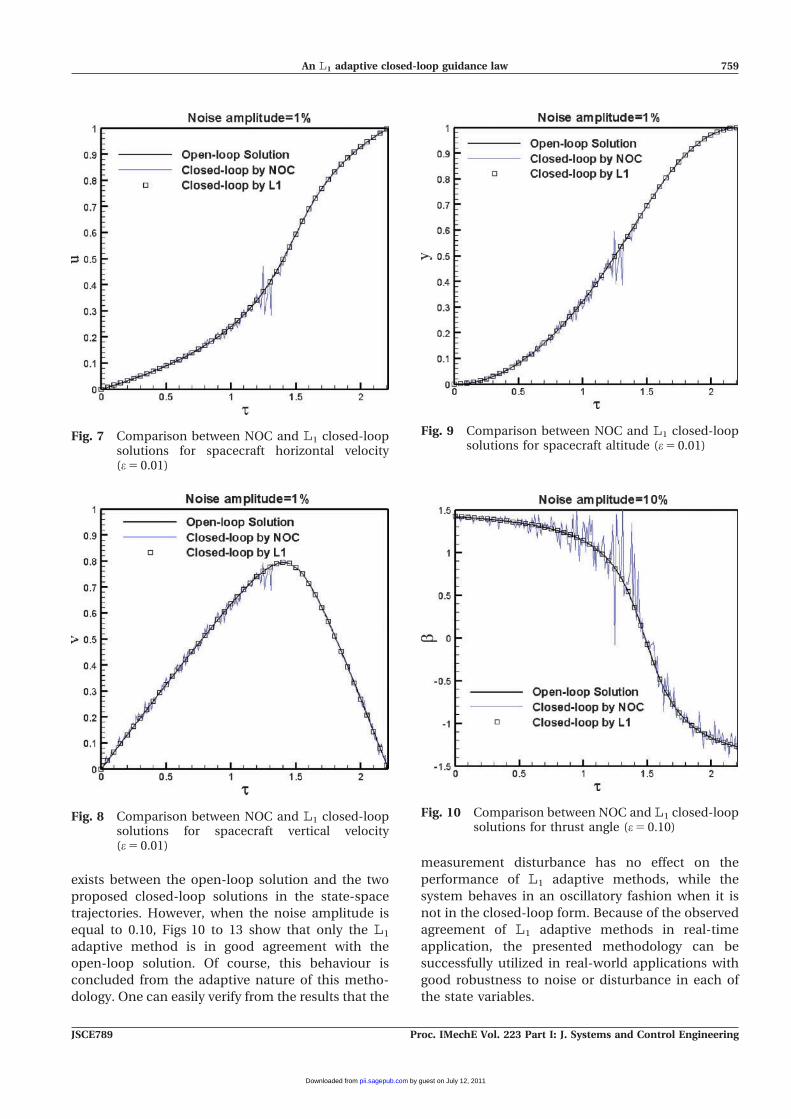
exists between the open-loop solution and the two
proposed closed-loop solutions in the state-space
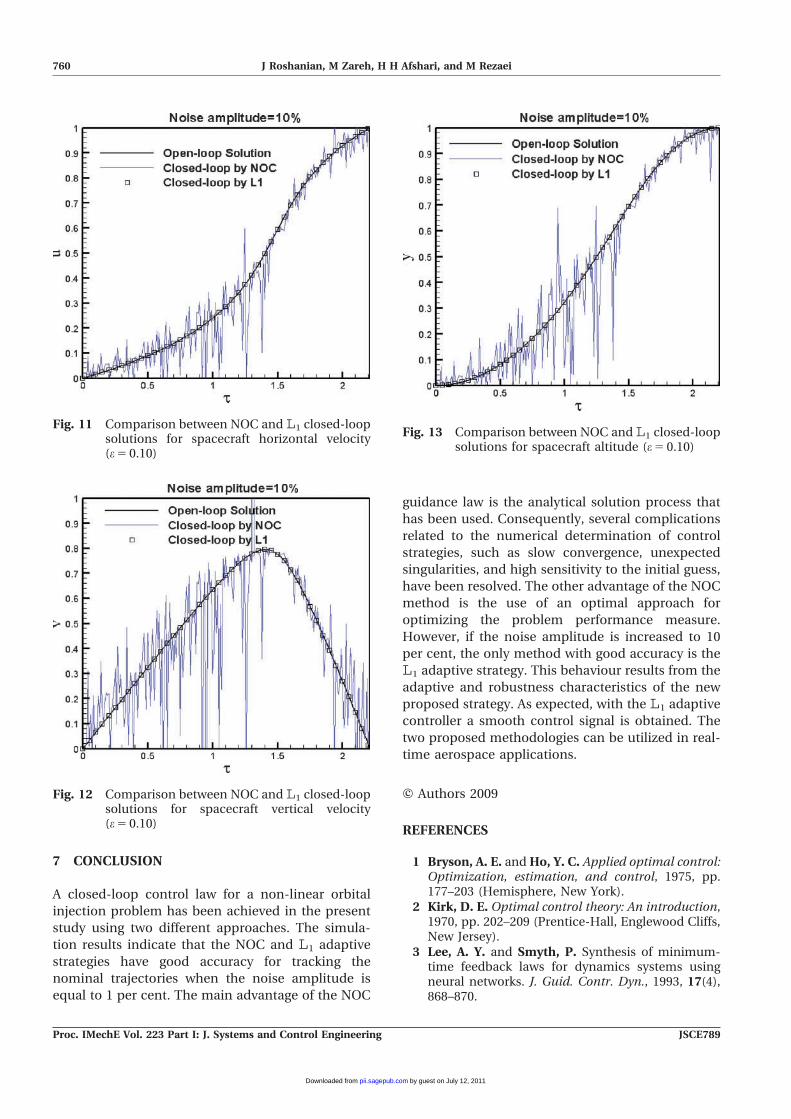
trajectories. However, when the noise amplitude is
equal to 0.10, Figs 10 to 13 show that only the L1
adaptive method is in good agreement with the
open-loop solution. Of course, this behaviour is
concluded from the adaptive nature of this metho-
dology. One can easily verify from the results that the
measurement disturbance has no effect on the
performance of L1 adaptive methods, while the
system behaves in an oscillatory fashion when it is
not in the closed-loop form. Because of the observed
agreement of L1 adaptive methods in real-time
application, the presented methodology can be
successfully utilized in real-world applications with
good robustness to noise or disturbance in each of
the state variables.
Fig. 7 Comparison between NOC and L1 closed-loopsolutions for spacecraft horizontal velocity(e5 0.01)
Fig. 8 Comparison between NOC and L1 closed-loopsolutions for spacecraft vertical velocity(e5 0.01)
Fig. 9 Comparison between NOC and L1 closed-loopsolutions for spacecraft altitude (e5 0.01)
Fig. 10 Comparison between NOC and L1 closed-loopsolutions for thrust angle (e5 0.10)
An L1 adaptive closed-loop guidance law 759
JSCE789 Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering
by guest on July 12, 2011pii.sagepub.comDownloaded from
7 CONCLUSION
A closed-loop control law for a non-linear orbital
injection problem has been achieved in the present
study using two different approaches. The simula-
tion results indicate that the NOC and L1 adaptive
strategies have good accuracy for tracking the
nominal trajectories when the noise amplitude is
equal to 1 per cent. The main advantage of the NOC
guidance law is the analytical solution process that
has been used. Consequently, several complications
related to the numerical determination of control
strategies, such as slow convergence, unexpected
singularities, and high sensitivity to the initial guess,
have been resolved. The other advantage of the NOC
method is the use of an optimal approach for
optimizing the problem performance measure.
However, if the noise amplitude is increased to 10
per cent, the only method with good accuracy is the
L1 adaptive strategy. This behaviour results from the
adaptive and robustness characteristics of the new
proposed strategy. As expected, with the L1 adaptive
controller a smooth control signal is obtained. The
two proposed methodologies can be utilized in real-
time aerospace applications.
F Authors 2009
REFERENCES
1 Bryson, A. E. andHo, Y. C. Applied optimal control:Optimization, estimation, and control, 1975, pp.177–203 (Hemisphere, New York).
2 Kirk, D. E. Optimal control theory: An introduction,1970, pp. 202–209 (Prentice-Hall, Englewood Cliffs,New Jersey).
3 Lee, A. Y. and Smyth, P. Synthesis of minimum-time feedback laws for dynamics systems usingneural networks. J. Guid. Contr. Dyn., 1993, 17(4),868–870.
Fig. 11 Comparison between NOC and L1 closed-loopsolutions for spacecraft horizontal velocity(e5 0.10)
Fig. 12 Comparison between NOC and L1 closed-loopsolutions for spacecraft vertical velocity(e5 0.10)
Fig. 13 Comparison between NOC and L1 closed-loopsolutions for spacecraft altitude (e5 0.10)
760 J Roshanian, M Zareh, H H Afshari, and M Rezaei
Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering JSCE789
by guest on July 12, 2011pii.sagepub.comDownloaded from
4 Jardin, M. R. and Bryson, A. E. Neighboringoptimal aircraft guidance in winds. J. Guid. Contr.Dyn., 2001, 24(4), 710–715.
5 Lee, A. Y. and Bryson, A. E. Neighboring extremalsof dynamic optimization problems with parametervariations. Optim. Contr. Appl. Meth., 1989, 10(1),39–52.
6 Pourtakdoust, S. H., Rahbar, N., and Novinzadeh,A. B. Nonlinear feedback optimal control law forminimum-time injection problem using fuzzysystem. Aircraft Engng Aerospace Technol., 2005,77(5), 376–383.
7 Chun-Liang, L., Yu-Ping, L., and Tian-Lin, W. Afuzzy guidance law for vertical launch interceptors.Control Engng Practice, 2009, 17(8), 914–923.
8 Palma, D. and Magni, L. On optimality of non-linear model predictive control. Syst. Contr. Lett.,2005, 5(6), 58–61.
9 Afshari, H. H., Roshanian, J., and Novinzadeh,A. B. A perturbation approach in determination ofa closed-loop optimal-fuzzy control policy forplanetary landing mission. Proc. IMechE, Part G: J.Aerospace Engineering, 2009, 223(G3), 233–243.DOI: 10.1243/09544100JAERO429.
10 Afshari, H. H., Zareh, M., Rezaei, M., Roshanian,J., and Novinzadeh, A. B. A new adaptive approachin determination of closed-loop guidance law forinjection problem. In Proceedings of the 2009 IEEEAerospace conference, Big Sky, Montana, 7–14March 2009, p. 1705 (International AstronauticalFederation, Paris).
11 Cao, C. and Hovakimyan, N. Design and analysisof a novel L1 adaptive control architecture, Part 1:Control signal and asymptotic stability. In Proceed-ings of the 2006 American control conference,Minneapolis, Minnesota, 14–16 June 2006, pp.3397–3402 (Institute of Electrical and ElectronicsEngineers, Piscataway, New Jersey).
12 Cao, C. and Hovakimyan, N. Design and analysisof a novel L1 adaptive controller, Part 2: Guaran-teed transient performance. In Proceedings of the2006 American control conference, Minneapolis,Minnesota, 14–16 June 2006, pp. 3403–3408 (In-stitute of Electrical and Electronics Engineers,Piscataway, New Jersey).
13 Cao, C. and Hovakimyan, N. Guaranteed transientperformance with L1 adaptive controller for sys-tems with unknown time-varying parameters and
bounded disturbance: Part 2. In Proceedings of the2007 American control conference, New York, NewYork, 9–13 July 2007, pp. 3925–3930 (Institute ofElectrical and Electronics Engineers, Piscataway,New Jersey).
14 Beard, W. R., Knoebel, N., Cao, C., Hovakimyan,N., and Matthews, J. An L1 adaptive pitch con-troller for miniature air vehicles. AIAA Guidance,Navigation, and Control Conference, AIAA paper2006-6777, 2006.
15 Slotine, J. J. and Li, W. Applied nonlinear control,1991 (Prentice Hall, Englewood Cliffs, New Jersey).
16 Astrom, K. and Wittenmark, B. Adaptive control,edition 2, 1995 (Addison Wesley, Reading, Massa-chusetts).
17 Cao, C. and Hovakimyan, N. Novel L1 neuralnetwork adaptive control architecture with guar-anteed transient performance. IEEE Trans. NeuralNetwork., 2007, 18(4), 1160–1171.
18 Wang, J., Cao, C., Hovakimyan, N., and Lavretsky,E. Novel L1 adaptive control approach to autono-mous aerial refueling with guaranteed transientperformance. In Proceedings of the 2006 Americancontrol conference, Minneapolis, Minnesota, 14–16June 2006, pp. 3569–3574 (Institute of Electricaland Electronics Engineers, Piscataway, New Jer-sey).
19 Cao, C. and Hovakimyan, N. Stability margins ofL1 adaptive controller. In Proceedings of the 2007American control conference, New York, New York,9–13 July 2007, pp. 3931–3936 (Institute of Elec-trical and Electronics Engineers, Piscataway, NewJersey).
20 Cao, C., Patel, V., Reddy, C. K., Hovakimyan, N.,and Lavretsky, E. Are the phase and time-delaymargins always adversely affected by high-gain?AIAA Guidance, Navigation, and Control Confer-ence, AIAA paper 2006-6347, 2006.
21 Wang, J., Patel, V. V., Cao, C., Hovakimyan, N.,and Lavretsky, E. L1 adaptive neural networkcontroller for autonomous aerial refueling withguaranteed transient performance. AIAA Guidance,Navigation, and Control Conference, AIAA paper2006-6206, 2006.
22 Pomet, J. and Praly, L. Adaptive nonlinear regula-tion: estimation from the Lyapunov equation. IEEETrans. Automat. Contr., 1992, 37(6), 729–740.
An L1 adaptive closed-loop guidance law 761
JSCE789 Proc. IMechE Vol. 223 Part I: J. Systems and Control Engineering
by guest on July 12, 2011pii.sagepub.comDownloaded from




















