An investigation of social factors related to online mentalizing in a human-robot competitive game
10
An investigation of social factors related to online mentalizing in a human-robot competitive game 1 HIDEYUKI TAKAHASHI, 2 * CHINATSU SAITO, HIROYUKI OKADA, and TAKASHI OMORI Tamagawa University Abstract: “Mentalizing” is the ability to attribute mental states to other agents. The lack of online mentalizing, which is required in actual social contexts, may cause serious social disorders such as autism. However, the mechanism of online mental- izing is still unclear. In this study, we found that behavioral entropy (which indicates the randomness of decision making) was an efficient behavioral index for online mentalizing in a human-human competitive game. Further participants played the game with a humanoid robot; the results indicated that the entropy was significantly higher in participants whose gaze followed the robot’s head turn than in those who did not, although the explicit human-likeness of the robot did not correlate with behavioral entropy. These results implied that mentalizing could be divided into two separate processes: an explicit, logical reasoning process and an implicit, intuitive process driven by perception of the other agent’s gaze. We hypothesize that the latter is a core process for online mentalizing, and we argue that the social problems of autistic people are caused by dysfunction of this process. Key words: online mentalizing, matching pennies game, human-robot competitive game, gaze following behavior. The ability to attribute a mental state to another agent is called “mentalizing” (Frith & Frith, 2006; Van Overwalle & Baetens, 2009). Mentalizing is essential for interpersonal inter- action, and many researchers are greatly con- cerned with the process of mentalizing. This topic has been investigated in various research fields, such as comparative psychology, develop- mental psychology, and neuroscience. In par- ticular, clinical disorders (e.g., autism spectrum disorder) have provided great insight into men- talizing (Castelli, Frith, Happé, & Frith, 2002; White, Hill, Happé, & Frith, 2009). Many previ- ous findings have suggested that dysfunction associated with mentalizing causes inappropri- ate social behaviors. However, the concrete mechanism behind mentalizing is still unclear. Specifically, there is a paucity of knowledge on how mentalizing works in actual social situa- tions, for example, interpersonal interaction. Mentalizing has been explained in terms of different processes, which are called “offline” and “online”; the latter rather than the former process is thought to have a critical role in actual social situations (Frith & Frith, 2010). Offline mentalizing is mental inference made *Correspondence concerning this article should be sent to: Hideyuki Takahashi, Brain Science Institute, Tamagawa University, Tamagawagakuen, Machida 194-8610, Japan. (E-mail: [email protected]) 1 This study was supported by a Grant-in-Aid for Scientific Research on Innovative Areas “Founding a creative society via collaboration between humans and robots (No. 4101)” (24118708), Grant-in-Aid for Young Scien- tists (B) No. 23700321, and Tamagawa University Global Center of Excellence grant from the Ministry of Education, Culture, Sports, Science and Technology, Japan. 2 The authors thank Ayaka Sugiura for her helpful comments on our manuscript. Japanese Psychological Research 2013, Volume 55, No. 2, 144–153 Special issue: Developmental disorders and cognitive science © 2013 Japanese Psychological Association. Published by Wiley Publishing Asia Pty Ltd. doi: 10.1111/jpr.12007
Transcript of An investigation of social factors related to online mentalizing in a human-robot competitive game

An investigation of social factors related to onlinementalizing in a human-robot competitive game1
HIDEYUKI TAKAHASHI,2* CHINATSU SAITO, HIROYUKI OKADA, and TAKASHI OMORITamagawa University
Abstract: “Mentalizing” is the ability to attribute mental states to other agents. Thelack of online mentalizing, which is required in actual social contexts, may causeserious social disorders such as autism. However, the mechanism of online mental-izing is still unclear. In this study, we found that behavioral entropy (which indicatesthe randomness of decision making) was an efficient behavioral index for onlinementalizing in a human-human competitive game. Further participants played thegame with a humanoid robot; the results indicated that the entropy was significantlyhigher in participants whose gaze followed the robot’s head turn than in those who didnot, although the explicit human-likeness of the robot did not correlate with behavioralentropy. These results implied that mentalizing could be divided into two separateprocesses: an explicit, logical reasoning process and an implicit, intuitive processdriven by perception of the other agent’s gaze. We hypothesize that the latter is a coreprocess for online mentalizing, and we argue that the social problems of autisticpeople are caused by dysfunction of this process.
Key words: online mentalizing, matching pennies game, human-robot competitivegame, gaze following behavior.
The ability to attribute a mental state toanother agent is called “mentalizing” (Frith &Frith, 2006; Van Overwalle & Baetens, 2009).Mentalizing is essential for interpersonal inter-action, and many researchers are greatly con-cerned with the process of mentalizing. Thistopic has been investigated in various researchfields, such as comparative psychology, develop-mental psychology, and neuroscience. In par-ticular, clinical disorders (e.g., autism spectrumdisorder) have provided great insight into men-talizing (Castelli, Frith, Happé, & Frith, 2002;White, Hill, Happé, & Frith, 2009). Many previ-
ous findings have suggested that dysfunctionassociated with mentalizing causes inappropri-ate social behaviors. However, the concretemechanism behind mentalizing is still unclear.Specifically, there is a paucity of knowledge onhow mentalizing works in actual social situa-tions, for example, interpersonal interaction.
Mentalizing has been explained in terms ofdifferent processes, which are called “offline”and “online”; the latter rather than the formerprocess is thought to have a critical role inactual social situations (Frith & Frith, 2010).Offline mentalizing is mental inference made
*Correspondence concerning this article should be sent to: Hideyuki Takahashi, Brain Science Institute,Tamagawa University, Tamagawagakuen, Machida 194-8610, Japan. (E-mail: [email protected])
1This study was supported by a Grant-in-Aid for Scientific Research on Innovative Areas “Founding a creativesociety via collaboration between humans and robots (No. 4101)” (24118708), Grant-in-Aid for Young Scien-tists (B) No. 23700321, and Tamagawa University Global Center of Excellence grant from the Ministry ofEducation, Culture, Sports, Science and Technology, Japan.
2The authors thank Ayaka Sugiura for her helpful comments on our manuscript.
bs_bs_banner
Japanese Psychological Research2013, Volume 55, No. 2, 144–153Special issue: Developmental disorders and cognitive science
© 2013 Japanese Psychological Association. Published by Wiley Publishing Asia Pty Ltd.
doi: 10.1111/jpr.12007

using deliberation and recursive reasoning. In atypical experimental task to test mentalizingabilities, participants are asked to infer a staticmental state (e.g., emotion/intention) of a char-acter who is passively presented (e.g., videoclip/cartoon/picture), and they are givenample time and information to deliberateregarding the task (Happé, 1994, Kana, Keller,Cherkassky, Minshew, & Just, 2009). Thus,typical lab experiments might only investigateoffline mentalizing. In contrast, online mental-izing makes use of emotional and intuitionalprocesses. Actual social contexts are not static,but the dynamic; mental states of others changefrequently, which makes it impossible to obtainenough information to infer others’ mentalstates and makes people sensitive to changes inmental state. Hence, in actual social contexts,people need to infer mental states with limitedamounts of time and information for delibera-tion. However, the mechanism of online men-talizing is still unclear because of the difficultyof investigating it using a typical laboratoryexperiment.
Experiments that require interaction withanother player, such as the prisoner’s dilemmagame, are expected to be useful for the investi-gation of online mentalizing (Lee, 2008). Thesegames contain fundamental attributes of actualsocial contexts, such as interests, reciprocity,and tactics. Because of these aspects, interactivegames are often used as microcosms of actualsocial contexts in economics, psychology, andneuroscience experiments. Compared withtypical laboratory experiments, which alwayshave one answer that does not change during atrial and can be answered through deep inves-tigation, interactive games require the partici-pant not only to guess another’s mental state,but also to pay attention to changes in themental state. When participants believe thattheir opponent in a game has a changeablemental state, they are expected to dynamicallyinfer the opponent’s mental state, just as inactual social contexts. Participants tend to thinkthat if their opponent is not human, the oppo-nent’s strategy will not change. Previous studiesusing interactive games have investigatedonline mentalizing by comparing a condition in
which the participants were instructed thattheir opponent was a human player (onlinementalizing is required) with a condition inwhich their opponent was a mindless computerprogram (online mentalizing is not required)(Coricelli & Nagel, 2009; Fukui, Murai, Shi-nozaki,Aso, Fukuyama, Hayashi, & Hanakawa,2006; Gallagher, Jack, Roepstorff, & Frith, 2002;McCabe, Houser, Ryan, Smith, & Trouard,2001; Rilling, Sanfey, Aronson, Nystrom, &Cohen, 2004; Waytz, Gray, Epley, & Wegner,2010). These studies succeeded in extractingspecific behavioral and brain activities relatedto online mentalizing. However, these studiescould not specify the precise factors related toonline mentalizing in human-human interac-tion, because the difference between these twoconditions (the opponent is either a humanplayer or a mindless computer program) isquite significant, and the appearance andmotions of a human opponent cannot be con-trolled uniformly among participants. In orderto specify the factors related to online mental-izing more precisely, the attributes of gameopponents need to be controlled more strictlythrough manipulation of multiple definiteexperimental variables.
In order to elucidate the precise factorsrelated to online mentalizing, we used a human-oid robot as an opponent during an interactivegame. The appearance and movements of therobot can be controlled reproducibly, and wecan define multiple experimental variables inthe human-robot interaction. In this study, weconducted two experiments using an iteratedmatching pennies game (MPG) on healthyadults. In the first experiment, we used a math-ematical measurement, “entropy,” to quantifythe behavioral changes caused by the instruc-tion given to participants that the opponent wasa human. From this experiment, we suggestedthat entropy is an efficient behavioral indexrelated to online mentalizing in the MPG. In thesecond experiment, the participants’ MPGopponent was a humanoid robot. We definedexplicit, subjective rating scales of the robot’shuman-likeness and the participant’s behaviorof following the robot’s gaze that expressed theparticipant’s implicit perception of the human-
Social factors related to mentalizing 145
© Japanese Psychological Association 2013.

likeness of the robot (Meltzoff, Brooks, Shon, &Rao, 2010) as experimental variables describinghuman-robot interaction, and we explore theexperimental variables’ relationships withentropy. On the basis of the results of these twoexperiments, we discuss the process of onlinementalizing and its dysfunction in autism.
Experiment I Specification of a
behavioral index related to online
mentalizing in the MPG
In this experiment, we specified a behavioralindex related to online mentalizing in the MPG.Concretely, we investigated whether the ran-domness of decision making in the MPGincreased when participants believed theiropponent was a human player using a behav-ioral index, entropy, which was calculated fromthe frequency of the participants’ decisions.
Materials and methodsThe MPG is a simple, zero-sum, competitivegame played by two players. In this game, eachplayer selects one decision from two options,“L” or “R,” in each trial; winning/losing out-comes for each player are determined by acombination of the decisions of the twoplayers. If both players select the same choice,one player is the winner and the other is theloser. If not, the identities of the winner and theloser are reversed. The winner receives a fixedreward, and the loser loses the same amount, ineach trial. The participants played this gameacross multiple trials and were asked toincrease their accumulated rewards as much aspossible. The MPG is a symmetrical, zero-sumgame, and the required strategy is completelyequal between the two players.The participantswere required to predict the opponent’s nextbehavior and to avoid the risk of having theirbehavior predicted by the opponent. In ourexperiment, the opponent was always a com-puter program, regardless of the instructionsgiven to the participants, and the programalways selected each option with equal prob-ability. Hence, the expected wining ratio wasalways 0.5, regardless of the participant’sdecision.
In experiment I, the MPG game was pro-grammed using the Microsoft Visual Basic 6.0(Microsoft Corp.) programming language inthe Windows XP operating system, and gamescenes were presented on a laptop personalcomputer in the following sequence duringeach trial: in the first scene, the opponentdecided its decision; in the second scene, theparticipant decided his/her decision by press-ing a key; in the third scene, the selections ofthe participant and the opponent were pre-sented; and in the fourth scene, the partici-pant’s accumulated reward was presented. Inthis experiment, if the two players selected dif-ferent choices, the participant was the winnerand received ¥50 (USD$1 equals approxi-mately ¥80); if the players selected the samechoices, the participant was the loser and lost¥50.
In this experiment, there were two condi-tions: the human opponent condition (HOcondition), in which the participants wereinstructed that the opponent was a humanplayer, and the computer opponent condition(CO condition), in which the participants wereinstructed that the opponent was a computerprogram. Each session of the HO or CO condi-tion consisted of 50 trials, and the order of theconditions was fixed: HO-CO-HO-CO-HO-CO(six total sessions). In the HO condition, theparticipants were instructed that their oppo-nent was a human player without being givenany extra information (e.g., how the opponentplayed the game). A man in his twenties, whowas a stranger to the participants, sat beside theparticipants as a pseudo-human opponent andpretended to be playing the game. The pseudo-human opponent was asked to press one keywithout hesitation, and this key press did notinfluence the opponent’s decision, as shown onthe display. The participants and the pseudo-human opponent were prohibited from talkingto or seeing each other. In the CO condition,the participants were instructed that the oppo-nent was a computer program, and they playedthe game similarly to the HO condition, exceptfor the absence of a pseudo-human opponent.It took approximately 20 min to complete theentire experiment.
H. Takahashi, C. Saito, H. Okada, and T. Omori146
© Japanese Psychological Association 2013.

ParticipantsNineteen healthy adult participants (sevenfemale and 12 male, aged 19–36 years) wereenrolled in the study. All participants wererecruited from among college students and fac-ulties, and interviews confirmed that they hadno developmental problems.
Behavioral analysisIn the MPG, generating random decisions isefficient in order for game players to avoid theprediction of their next decision by their oppo-nent: randomness of decision making is animportant behavioral index in the MPG. Wequantified the randomness of decision makingduring each session of the MPG as entropy H,which was calculated from the conditional fre-quency p(d|c) of decision d (L or R) selected incurrent game context c (the recent choices forparticipants and opponents). Entropy H indi-cates how decision d is generated indepen-dently from the current game context, and thevalue of H positively correlates with the degreeof randomness of decision making in the MPG.
p(d|c) was calculated using the followingequation:
p d sn d s k
n i s ki
||
|( ) =
( ) +( ) +{ }∑
The variable n(d|c) indicates the observednumber of decisions d in context c. k is a cor-rection coefficient that prevents small samplesfrom deforming p(d|c). Because workingmemory is limited, the participants could notaccess the entire context; rather, their decisionsmight be based on a portion of the context. Weassumed six partial contexts (pc) for entropyestimation (S1: the last decision by the partici-pant; S2: the last two decisions by the partici-pant; O1: the last decision by the opponent; O2:the last two decisions by the opponent; S1 &O1: a combination of the last decision by boththe participant and the opponent; none: nogame context) and cpc is the game context cor-responding to each pc. Entropy H(d|cpc) ineach session is calculated using the followingequation:
HN
p d c log p d cpcpc
pc pc
dcpc
= − ( ) ( )∑∑12| |
Here, Npc is the number of possible alternativesfor a particular cpc, and this variable normalizesHpc in the range from 0 to 1. For each session,the lowest of the six entropy values was chosenas the decision-entropy value for that session.This value increases towards one as the deci-sions become less predictable.
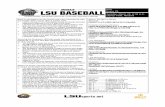
ResultsWe confirmed that all participants believed thattheir opponent was a human player in the HOcondition by interview after the experiment.Wecompared both the acquired reward and thebehavioral entropy between the HO and COconditions using one-way repeated ANOVAs.There was no significant difference in theacquired reward between the HO and CO con-ditions. However, we found a significant maineffect of experimental condition on entropy(Figure 1), F(1, 18) = 11.122, p < .01. The meanof the entropy in the HO condition was signifi-cantly higher than that in the CO condition.Theinstruction that the game opponent was ahuman player thus improves the randomness ofthe participants’ decision making in the MPGregardless of actual game performance, and ourresults suggested that entropy is an efficientbehavioral index related to online mentalizingin MPG.
0.9
0.85
0.8
0.75
0.7
0.65
0.6CO condition HO condition
Entr
opy o
f part
icip
ant’s
response
Figure 1 Mean entropy values of participants’decision sequences in each condition (error barsrepresent standard errors). CO = computer oppo-nent; HO = human opponent.
Social factors related to mentalizing 147
© Japanese Psychological Association 2013.

Experiment II Investigation of
social factors related to online
mentalizing in MPG with a
humanoid robot opponent
In Experiment I, we specified a behavioralindex, entropy, which is related to online men-talizing in the MPG. However, we could notinvestigate the concrete factors included inhuman-human interaction that influencedentropy in the MPG, because human-humaninteraction was too complicated for preciseinvestigation. To overcome the difficulties ininvestigating human-human interaction, wedeveloped a human-robot competitive game inwhich participants played the MPG with ahumanoid robot.
The appearance of humanoid robots wasquite familiar to the participants, and the move-ment of the humanoid robot was controlled byan experimenter in another room. Several pre-vious studies have suggested that participantsoften attribute mental states to mindless robots,and the exploration of factors that induce theattribution of mental faculties to the robotsheds light on the precise mechanism of thementalizing process (Krach, Hegel, Wrede,Sagerer, Binkofski, & Kircher, 2008).
We conducted this experiment with two pur-poses: one was to explore the social factorsrelated to entropy in the MPG. For thispurpose, we defined two social factors asexperimental variables. One was a subjectiverating of the robot’s human-likeness, and theother was the participant’s behavior of follow-ing the robot’s gaze. Then, we investigatedwhich experimental variables were stronglyrelated to entropy in the MPG. The secondpurpose was to investigate entropy in theMPG before and after the human-robotimitation. Imitation between two agents isknown to strongly influence the social relation-ship between them (Van Baaren, Holland,Kawakami, & van Knippenberg, 2004). Hence,we investigated whether the human-robot imi-tation influenced the process of online mental-izing during the human-robot competitivegame. For this purpose, we prepared threevariations of the human-robot imitation: the
“observation” group (control condition), the“participant imitation” group, and the “robotimitation” group; we compared the degrees ofentropy among these three conditions.
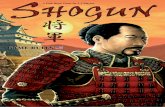
MethodsIn this experiment, we used a humanoid robotnamed “PoCoBot” as the opponent in the MPG(Figure 2). The robot could move its arms,change its facial direction, and speak predeter-mined sentences according to the remotecontrol of the experimenter.
The participants sat at a table facing the frontof the robot (the distance between the partici-pants and the robot was approximately 1 m).The participants were given two cards; one had“Left” and the other had “Right” printed onone side of each card. In each trial, the partici-pants selected one of these two cards andplaced the selected card face-down on the table.Then, the robot indicated one direction, eitherleft or right, with a gesture. The robot selectedeach direction with equal probability (0.5).However, the participants were not instructedas to the robot’s strategy, and they wereinstructed to predict the direction that therobot would select. If the direction selected bythe participant and the direction selected bythe robot were the same, the participant was thewinner; if not, the participant was the loser. Theparticipants were motivated to win the game bythe instruction that they would receive a largereward if they won against the robot in manytrials. Participants played the MPG for 20 trialswith the robot in each session. Before the
Figure 2 Experimental scene with a robot.
H. Takahashi, C. Saito, H. Okada, and T. Omori148
© Japanese Psychological Association 2013.

session, the participants had a short conversa-tion with the robot (i.e., greeting), and the robotsuddenly turned its head during the conversa-tion. We checked whether the participants fol-lowed the robot’s gaze direction with their owngaze just after the robot turned its head. Theparticipants were also asked to rate the human-likeness of the robot on a seven-point scale ineach session.
In this experiment, the participants playedthe MPG with the robot for two sessions. Theparticipants were divided into three groups. Inthe observation group, they were simplyinstructed to observe the robot’s arm move-ments for 2 min between the two sessions. Inthe participant imitation group, the robotmoved its arms randomly, and the participantswere instructed to imitate the robot’s armmovements during the same period. In therobot imitation group, they were asked to movetheir arms freely, and the robot imitated theparticipant’s arm movements.
ParticipantsTwenty-seven healthy adult participants (12female and 15 male, aged 18–29 years) wereenrolled in the study. Nine participants wereassigned to the observation group, ten partici-pants were assigned to the participant imitationgroup, and eight participants were assigned tothe robot imitation group.
ResultsWe compared the mean of human-likenessin each session across the participant groups
using a two-way ANOVA ([session number] ¥[participant group]; Figure 3). We did not findany significant effects of participant group,but we did find a main effect of sessionnumber,F(1,24) = 18.191,p < .001.These resultssuggested that the participants tended to ratethe human-likeness of the robot as higher in thesecond session than the first, regardless of thegroup assignment.
We also compared the mean of entropy ineach session across the participant groupsusing a two-way ANOVA ([session number] ¥[participant group]; Figure 4). We did not findany significant effects of either the sessionnumber or the participant group, althoughthe subjective human-likeness of the robotincreased from the first to the second session.These results suggested that the randomnessof decision making in the MPG with the robotwas independent from the subjective human-likeness of the robot.
Next, we investigated whether the partici-pant’s behavior of following the gaze of therobot related to the subjective human-likenessof the robot or to the entropy of the partici-pant’s responses. In the first session, approxi-mately 74% of the participants followed thegaze of the robot, as did approximately 78% inthe second session.There was no significant dif-ference in this ratio between the two sessions.We compared the means of the subjectivehuman-likeness of the robot between the ses-sions when the participant exhibited gaze-following behavior and the sessions when theparticipant did not follow the robot’s gaze. We
Observation Participantimitation
Robotimitation
7
6Pre Post
5
4
3
2
1
Hum
an-lik
eness o
fro
bot opponent
Figure 3 Mean human-likeness ratings of the robot opponent in each session and participant group (errorbars represent standard errors).
Social factors related to mentalizing 149
© Japanese Psychological Association 2013.

did not find a significant difference between thetrials with and without gaze-following behavior(Figure 5). Next, we compared the means ofthe entropy of participant decision sequencesbetween the sessions with gaze-followingbehavior and the sessions without it. We foundthat the mean of entropy in the sessions withgaze following was significantly higher than thatin sessions without gaze following (Figure 6;t-test: p < .05). These results suggested that theentropy of the participants’ decision sequencestended to be high when they followed therobot’s gaze, regardless of the subjectivehuman-likeness of the robot.
Discussion
In this study, we quantified online mentalizingin the MPG with a behavioral index, entropy,and we explored the factors included in human-robot interaction that influenced entropy. Wefound that when the participant followed thegaze of the robot, entropy was elevated,although entropy was independent of the par-ticipant’s scores with respect to the subjectivehuman-likeness of the robot.
The human-robot imitation did not signifi-cantly influence online mentalizing, that is,entropy, although some previous studies havesuggested that imitation between two agentsstrongly influences the relationship betweenthem. The influence of imitation is known to bestrong when the imitation is executed implicitly.However, the participants were instructed
about human–robot imitation explicitly in ourexperiment. Previous studies have suggestedthat implicit interpersonal imitation influencedparticipants’ cognition more strongly thanexplicit imitation (Lakin & Chartrand, 2003). Ifthe robot imitates the participants’ body move-ment implicitly, some improvement in onlinementalizing might occur due to the imitation. Ifonline mentalizing increases because of thehuman-robot imitation, this finding could haveimplications for robotic therapy for social dis-orders, such as autism.
The explicit human-likeness of the robotincreased from the first session to the secondsession, although entropy did not changebetween the two sessions. This might be causedby the mere-exposure effect (Zajonc, 1968):the participants’ explicit impressions of therobot improved throughout the experiment.However, online mentalizing was not affectedby the mere-exposure effect.
The participants’ gaze-following behaviormeant that the participants were aware of therobot’s eyes: if the participants did not recog-nize the robot’s eyes, then there would havebeen no reason to follow its gaze and lookahead of it. Social psychology studies have sug-gested that perception of other eyes influencesprosocial behavior unconsciously (Mifune,Hashimoto, & Yamagishi, 2010). Our resultsimplied that behavioral change related toonline mentalizing in the MPG is not driven bythe explicit perception of human-likeness, butby the implicit perception of “eyes.” In terms of
Observation Participantimitation
Robotimitation
1
0.8
0.6
0.4
0.2
0Entr
opy o
fpart
icip
ant’s
re
sponse
Pre Post
Figure 4 Mean entropy of participant response sequences in each session and participant group (error barsrepresent standard errors).
H. Takahashi, C. Saito, H. Okada, and T. Omori150
© Japanese Psychological Association 2013.

game theory, the increase in randomness ofdecision making is quite optimal in the MPG,because a static strategy has a significant risk ofbeing predicted by the opponent when theopponent “observes” the player’s strategy withits eyes (Nash, 1950). Hence, if a participant isaware of a robot’s eyes, it is reasonable for the
participant to increase his/her randomness ofdecision making to avoid the risk of a pooroutcome in the MPG. Interestingly, our resultsimply that this behavioral influence is notdriven by explicit human perception but byreflexive following of the robot’s eyes.
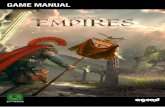
The abovementioned interpretation ofonline mentalizing is quite similar to the dual-process model for reasoning (Evans, 2003). Inthat model, human reasoning is thought toconsist of two distinct processes: one is a delib-erative reasoning system, and the other is anautonomous system driven by innate inputmodules. The former system permits highlyabstract thinking, but it also requires a heavycognitive load. In contrast, the latter system istoo intuitive, but it permits rapid responsewithout mental effort. We consider that offlinementalizing corresponds to the former systemof reasoning regarding another’s mental state,and online mentalizing corresponds to thelatter, autonomous system. Actual social situa-tions change dynamically and contain signifi-cant ambiguity. Taken together with the abovediscussions, we propose a dual-process modelfor mentalizing that consists of an explicitlogical reasoning process for offline mentalizingand an implicit institutive system for onlinementalizing (Figure 7). If we try to infer others’mental states using logical reasoning in actualsocial situations, it requires much effort andcauses much stress. Hence, the autonomoussystem is more useful in actual social situations.
High-functioning autistic people have autis-tic traits but no difficulties in terms of intellec-tual or verbal abilities. They often achieveperformance on par with that of typically
Trials withoutgaze following
Trials withgaze following
7
6
5
4
3
2
1Hum
an-lik
eness o
fro
bot opponent
Figure 5 Mean human-likeness rating of the robotopponent in trials with versus without gaze-following behavior of the participant (error bars rep-resent standard errors).
Trials withoutgaze following
Trials withgaze following
0.8
0.75
0.7
0.65
0.6
0.55
0.5Entr
opy o
fpart
icip
ant’s
response
Figure 6 Mean of entropy of participant responsesin trials with vs. without gaze-following behavior ofthe participant (error bars represent standard errors).
Figure 7 Explicit and implicit processes of mentalizing.
Social factors related to mentalizing 151
© Japanese Psychological Association 2013.

developing people in laboratory experimentsthat require mentalizing (Shamay-Tsoory, 2008;Slaughter & Paynter, 2007). However, theyhave many problems in communicating withothers in their daily lives. Recently, this incon-sistency between laboratory experiments andactual social contexts has been explained interms of the distinction between “offline” and“online” mentalizing (Roeyers & Demurie,2010). Because they have high levels of abilityto deliberate regarding mental states, high-functioning autistic people might not haveserious problems with offline mentalizing. Inap-propriate social behaviors in autistic peoplemight be caused by abnormalities in onlinementalizing; the autonomous system driven byshortcomings in the perception of others’ eyes.Izuma and colleagues showed that the influenceof others’ eyes on prosocial behavior is weak inautistic people (Izuma, Matsumoto, Camerer, &Adolphs, 2011).
Recent studies suggest that the enhancementof prosocial behavior driven by others’ eyes iscaused by the awareness of risk aversion. If onedoes not practice prosocial behavior in a publicplace where other people observe him/her, his/her reputation might suffer. To avoid this risk,people eagerly practice prosocial behaviorwhen they are aware of others’ eyes. Hence,both the increases in entropy in the MPG andprosocial behavior in public spaces might bedriven by an increase in risk awareness. Takentogether, our results indicate that being awareof others’ eyes automatically increases our riskawareness, and this awareness regulates ourcognition and behavior of avoiding varioussocial risks.We believe that autistic people havea serious problem in this autonomous system.
Finally, we discuss a neural correlate of thisimplicit system that controls risk awarenessdepending on the presence of others’ eyes. Weconsider the anterior insula to be a key brainregion. The anterior insula is known to inte-grate various information between one’s ownbody and external environments, and it alsocontrols risk awareness (Singer, Critchley, &Preuschoff, 2009). Because of this function, theanterior insula is sometimes called the brain’s“alarm system” (Clark, Bechara, Damasio,
Aitken, Sahakian, & Robbins, 2008). Uddin andMenon (2009) hypothesized that the anteriorinsula is a salience network that drives execu-tive function depending on external sensoryinputs; they also mentioned that this neuralcircuit is malformed in autistic people. Dysfunc-tion of the anterior insula might lead to seriousproblems in online mentalizing among autisticpeople.
References
Castelli, F., Frith, C., Happé, F., & Frith, U. (2002).Autism, Asperger syndrome and brain mecha-nisms for the attribution of mental states to ani-mated shapes. Brain, 125, 1839–1849.
Clark, L., Bechara, A., Damasio, H., Aitken, M. R. F.,Sahakian, B. J., & Robbins, T. W. (2008). Differ-ential effects of insular and ventromedial pre-frontal cortex lesions on risky decision-making.Brain, 131, 1311–1322.
Coricelli, G., & Nagel, R. (2009). Neural correlates ofdepth of strategic reasoning in medial prefrontalcortex. Proceedings of the National Academy ofSciences of the United States of America, 106,9163–9168.
Evans, J. B. T. (2003). In two minds: Dual-processaccounts of reasoning. Trends in Cognitive Sci-ences, 7, 454–459.
Frith, C. D., & Frith, U. (2006). The neural basis ofmentalizing. Neuron, 50, 531–534.
Frith, U., & Frith, C. D. (2010). The social brain:Allowing humans to boldly go where no otherspecies has been. Philosophical Transactions ofthe Royal Society B, 365, 165–176.
Fukui, H., Murai, T., Shinozaki, J., Aso, T., Fukuyama,H., Hayashi, T., & Hanakawa, T. (2006). Theneural basis of social tactics: An fMRI study.NeuroImage, 32, 913–920.
Gallagher, H. L., Jack, A. I., Roepstorff, A., & Frith,C. D. (2002). Imaging the intentional stance in acompetitive game. NeuroImage, 16, 814–821.
Happé, F. (1994). An advanced test of theory of mind:Understanding of story characters’ thoughts andfeelings by able autistic, mentally handicapped,and normal children and adults. Journal ofAutism and Developmental Disorders, 24, 129–154.
Izuma, K., Matsumoto, K., Camerer, C. F., & Adolphs,R. (2011). Insensitivity to social reputation inautism. Proceedings of the National Academy ofSciences of the United States of America, 108,17302–17307.
Kana, R. K., Keller, T.A., Cherkassky, V. L., Minshew,N. J., & Just, M. A. (2009). Atypical frontal-
H. Takahashi, C. Saito, H. Okada, and T. Omori152
© Japanese Psychological Association 2013.

posterior synchronization of Theory of Mindregions in autism during mental state attribution.Social Neuroscience, 4, 135–152.
Krach, S., Hegel, F., Wrede, B., Sagerer, G., Binkofski,F., & Kircher, T. (2008). Can machines think?Interaction and perspective taking with robotsinvestigated via fMRI. PLoS One, 3, e2597.
Lakin, J. L., & Chartrand, T. L. (2003). Using noncon-scious behavioral mimicry to create affiliationand rapport. Psychological Science, 14, 334–339.
Lee, D. (2008). Game theory and neural basis ofsocial decision making. Nature Neuroscience, 11,404–409.
McCabe, K., Houser, D., Ryan, L., Smith, V., &Trouard, T. (2001). A functional imaging study ofcooperation in two-person reciprocal exchange.Proceedings of the National Academy of Sciencesof the United States of America, 98, 11832–11835.
Meltzoff, A. N., Brooks, R., Shon, A. P., & Rao, R. P. N.(2010). “Social” robots are psychological agentsfor infants: A test of gaze following. Neural Net-works, 23, 966–972.
Mifune, N., Hashimoto, H., & Yamagishi, T. (2010).Altruism toward in-group members as a reputa-tion mechanism. Evolution and Human Behav-ior, 31, 109–117.
Nash, J. F. (1950). Equilibrium points in n-persongames. Proceedings of the National Academy ofSciences of the United States of America, 36,48–49.
Rilling, J. K., Sanfey, A. G., Aronson, J. A., Nystrom,L. E., & Cohen, J. D. (2004). The neural corre-lates of theory of mind within interpersonalinteractions. NeuroImage, 22, 1694–1703.
Roeyers, H., & Demurie, E. (2010). How impaired ismind-reading in high-functioning adolescentsand adults with autism? European Journal ofDevelopmental Psychology, 7, 123–134.
Shamay-Tsoory, S. (2008). Recognition of “fortune ofothers” emotions in Asperger syndrome and highfunctioning autism. Journal of Autism and Devel-opmental Disorders, 38, 1451–1461.
Singer, T., Critchley, H. D., & Preuschoff, K. (2009). Acommon role of insula in feelings, empathy anduncertainty. Trends in Cognitive Sciences, 13,334–340.
Slaughter, V., & Paynter, J. (2007). Social maturityand theory of mind in typically developing chil-dren and those on the autism spectrum. Journalof Child Psychology and Psychiatry, 48, 1243–1250.
Uddin, L. Q., & Menon, V. (2009). The anterior insulain autism: Under-connected and under-examined. Neuroscience and BiobehavioralReviews, 33, 1198–1203.
Van Baaren, R. B., Holland, R. W., Kawakami, K., &van Knippenberg, A. (2004). Mimicry and proso-cial behavior. Psychological Science, 15, 71–74.
Van Overwalle, F., & Baetens, K. (2009). Understand-ing others’ actions and goals by mirror and men-talizing systems: A meta-analysis. NeuroImage,48, 564–584.
Waytz, A., Gray, K., Epley, N., & Wegner, D. M.(2010). Causes and consequences of mind per-ception. Trends in Cognitive Sciences, 14, 383–388.
White, S., Hill, E., Happé, F., & Frith, U. (2009). Revis-iting the strange stories: Revealing mentalizingimpairments in autism. Child Development, 80,1097–1117.
Zajonc, R. (1968). Attitudinal effects of mere expo-sure. Journal of Personality and Social Psychol-ogy, 9, 1–27.
(Received May 28, 2012; accepted November 3, 2012)
Social factors related to mentalizing 153
© Japanese Psychological Association 2013.