An Excess-Demand Dynamic Traffic Assignment Approach for Inferring Origin-Destination Trip Matrices
33
1 An Excess-Demand Dynamic Traffic Assignment Approach for Inferring Origin-Destination Trip Matrices Chi Xie † School of Naval Architecture, Ocean and Civil Engineering Shanghai Jiaotong University Jennifer Duthie ‡ Center for Transportation Research University of Texas at Austin Abstract The focus of this paper is on the development of an origin-destination (O-D) demand estimation method for dynamic equilibrium traffic networks. It is hypothesized that the underlying equilibrium conditions in such networks are a compromise result of minimization of individual routing costs, minimization of traffic count matching errors, and maximization of O-D demand entropies. By adding an upper bound of travel demand and a dummy path with constant travel cost to each O-D pair, we formulated the dynamic O-D demand estimation problem as an excess-demand dynamic traffic assignment (DTA) problem defined for an expanded network with dummy paths. Such a formulation enables us to apply existing DTA solution methods and software tools for deriving the path flow pattern in the expanded network and thus simultaneously obtaining the O-D demand pattern in the original network. Following this problem transformation and network expansion strategy, an iterative solution procedure is accordingly proposed, which resorts to repeatedly solving the excess-demand DTA problem and adjusting the dummy path costs. An application of the proposed modeling and solution method for an example cell-based network problem illustrates its great promise in the methodological advance and solution performance aspects. 1. Introduction Dynamic traffic assignment (DTA) methods proved to be a critical analysis and evaluation tool in many traffic network operations and planning applications. In the past three decades, numerous contributions have been devoted to creating, improving and implementing a variety of types of DTA methods. As a result, a number of theoretically solid, practically operational and computationally feasible DTA software packages emerged in recent years and have been successfully used in the practice of traffic network analysis. During the same period, however, much less attention has been paid to the development of origin-destination (O-D) demand Accepted by the 4th International Symposium on Dynamic Traffic Assignment for presentation and by Networks and Spatial Economics for publication. † Corresponding author. Professor. Address: A610 Mulan Ruth Chu Chao Bldg., 800 Dongchuan Rd., Shanghai 200240, China. Phone: +86 (21) 3420-8385. Fax: +86 (21) 3420-6197. E-mail: [email protected]. ‡ Research Engineer. Address: 1616 Guadalupe St., Suite 4.330, Austin, Texas 78701, United States. Phone: +1 (512) 232-3088. Fax: +1 (512) 232-3153. E-mail: [email protected].
Transcript of An Excess-Demand Dynamic Traffic Assignment Approach for Inferring Origin-Destination Trip Matrices

1
An Excess-Demand Dynamic Traffic Assignment Approach for Inferring
Origin-Destination Trip Matrices
Chi Xie†
School of Naval Architecture, Ocean and Civil Engineering
Shanghai Jiaotong University
Jennifer Duthie‡
Center for Transportation Research
University of Texas at Austin
Abstract
The focus of this paper is on the development of an origin-destination (O-D) demand
estimation method for dynamic equilibrium traffic networks. It is hypothesized that
the underlying equilibrium conditions in such networks are a compromise result of
minimization of individual routing costs, minimization of traffic count matching
errors, and maximization of O-D demand entropies. By adding an upper bound of
travel demand and a dummy path with constant travel cost to each O-D pair, we
formulated the dynamic O-D demand estimation problem as an excess-demand
dynamic traffic assignment (DTA) problem defined for an expanded network with
dummy paths. Such a formulation enables us to apply existing DTA solution
methods and software tools for deriving the path flow pattern in the expanded
network and thus simultaneously obtaining the O-D demand pattern in the original
network. Following this problem transformation and network expansion strategy,
an iterative solution procedure is accordingly proposed, which resorts to repeatedly
solving the excess-demand DTA problem and adjusting the dummy path costs. An
application of the proposed modeling and solution method for an example cell-based
network problem illustrates its great promise in the methodological advance and
solution performance aspects.
1. Introduction
Dynamic traffic assignment (DTA) methods proved to be a critical analysis and
evaluation tool in many traffic network operations and planning applications. In the
past three decades, numerous contributions have been devoted to creating,
improving and implementing a variety of types of DTA methods. As a result, a
number of theoretically solid, practically operational and computationally feasible
DTA software packages emerged in recent years and have been successfully used in
the practice of traffic network analysis. During the same period, however, much less
attention has been paid to the development of origin-destination (O-D) demand
Accepted by the 4th International Symposium on Dynamic Traffic Assignment for presentation and by
Networks and Spatial Economics for publication. † Corresponding author. Professor. Address: A610 Mulan Ruth Chu Chao Bldg., 800 Dongchuan Rd.,
Shanghai 200240, China. Phone: +86 (21) 3420-8385. Fax: +86 (21) 3420-6197. E-mail:
[email protected]. ‡ Research Engineer. Address: 1616 Guadalupe St., Suite 4.330, Austin, Texas 78701, United States.
Phone: +1 (512) 232-3088. Fax: +1 (512) 232-3153. E-mail: [email protected].
2
estimation methods for dynamic networks. Many existing methods are not
inherently consistent with the underlying dynamic routing behavior and are often
specific to only a certain type of network environments or a certain category of field
data. In many cases, lack of reliable dynamic O-D demand estimation methods
seriously impedes the application of DTA tools.
Among different data sources, traffic data provided by traffic sensors are believed to
be the most readily available, frequently updated, and qualitatively accurate.
Because of this reason, traffic data-based demand estimation methods are often
preferable to other methods relying on alternative data sources, from the perspective
of cost effectiveness. The general design philosophy for such demand estimation
methods is to make it, when the estimated demand table is used as input to evaluate
dynamic network flows, to achieve the goal of replicating or approximating the
observed traffic data in a maximum and unbiased manner. Given that a dynamic O-
D demand table is represented as a consecutive time series of O-D matrices, the
replication or approximation is often achieved by some statistical optimization
principles. On the other hand, to properly reflect individual travel behaviors and
the network congestion effect, the flow-cost consistency should be explicitly or
implicitly implied in the demand estimation process. Characterizing the network
equilibrium imposed by traffic dynamics and travel behaviors in general requires a
DTA model. Simultaneously accommodating both the optimization principles and
dynamic equilibrium conditions in a single model poses a very challenging modeling
task.
Our focus in this paper is on the development of a dynamic O-D demand estimation
method that uses traffic counts as input data and is applicable to general traffic
networks while ensuring an endogenous time-dependent flow-cost consistency and
realizing a simultaneous determination of all time-dependent O-D matrices over the
analysis period. In the existing literature, two model structures for this type of
problems were proposed: 1) optimization model with equilibrium constraints, which
typically forms the so-called bi-level mathematical programming structure, where
the lower-level problem is used to specify the equilibrium network flows; 2)
composite equilibrium model, which poses a single-level equilibrium problem where
the equilibrium costs are a composite result of actual travel costs and artificial
optimality terms corresponding to some given statistical optimization principle.
Different model structures led to different solution methods in the literature.
Specifically, in the bi-level case, Tavana (2001) applied an iterative optimization-
assignment procedure to approximate an O-D demand table by repeatedly tackling
the upper-level optimization problem that includes a term of minimizing the
estimation deviation from an available historical O-D matrix and the lower-level
assignment problem that represents the dynamic network flows. Cipriani et al.
(2011) also employed an iterative optimization-assignment solution framework, in
which an approximate gradient-based method is used to search for the improvement
direction of the objective function. Zhou et al. (2012) converted their bi-level
problem into a one-level problem by Lagrangian relaxation, in which the lower-level
problem specified by a gap function is relaxed, and resorted to a solution approach of
iteratively solving the relaxed problem and updating the Lagrangian multipliers.
Mahut et al. (2004) implemented a trip table adjustment method with the aim of
3
minimizing the difference between measured intersection counts and simulated
turning movements using a steepest descent method. This optimization principle
and method were originally proposed by Spiess (1990) for a static O-D demand
estimation problem, who attempted to find a solution that minimizes the sum of
squared deviations between assigned and observed flows at a local optimum while
maintaining the demand change across O-D pairs close to the initial O-D demand
matrix in a proportional way. Choi et al. (2009) also adopted Speiss’ method, which
starts with an O-D matrix distributed uniformly over time, finding the first locally
optimal solution that minimizes the sum of squared flow deviations. In view of the
solution difficulty caused by the bi-level structure, metaheuristic methods have been
used for searching for optimal O-D demand matrices, for example, the evolutionary
algorithm employed by Kattan and Abdulhai (2006). It is noted that in all these
mentioned dynamic O-D demand estimation studies, a simulation-based DTA model
is used to estimate dynamic network flows.
In the single-level case, the earliest work is due to Bell et al. (1997), to the author’s
best knowledge. They formulated a composite equilibrium model in the context of
capacitated stochastic traffic assignment, which accounts for the routing behavior of
simultaneously minimizing the perceived individual travel costs (including
undelayed travel time and queuing delay) and dual costs related to measured link
counts. However, their model presumes accurate traffic measurements and cannot
deal with the traffic count inconsistency issue. The single-level composite
equilibrium modeling approach has been also employed in other O-D demand
estimation problems, for either static or dynamic networks, including Nie and Zhang
(2008, 2010), Shen and Wynter (2011), and Xie and Kockelman (2012), with different
behavioral assumptions and modeling components from one another. Evidently, in
terms of the solution tractability and computational efficiency, the single-level
approach is preferable to the bi-level.
The literature also contains various other dynamic O-D demand estimation methods
for alternative network settings and circumstances, for example, those for
intersections or highway corridors, those using an exogenous dynamic assignment
matrix, and those for real-time demand estimations and predictions. For a
comprehensive review on dynamic O-D demand estimation methods, interested
readers are referred to a few recent Ph.D. dissertations, including Tavana (2001),
Zhou (2004), and Nie (2006).
The remaining part of this paper is organized in the following order. In Section 2,
we introduce the notation used throughout the paper, the basic modeling mechanism
and dicretization scheme of network flow models, and the methods of evaluating
path travel times, least-squares path deviation costs and maximum-entropy path
deviation costs. We employ the cell transmission model (CTM) to describe the traffic
propagation and interaction over the network, due to its numerical consistency with
the classic hydrodynamic traffic flow theory and its extensive use in various dynamic
network equilibrium and optimization applications. In Section 3, we define the
optimality conditions of the proposed augmented DTA problem and formulate the
problem into a variational inequality (VI) model and prove its solution existence,
equivalence and uniqueness. Section 4 presents an iterative solution procedure, of
which the major algorithmic steps include solving the augmented DTA problem and

4
adjusting the dummy path costs. Section 5 illustrates the application of the
modeling and solution methods through a numerical example and discusses the
issues of large-scale implementations. Finally, Section 6 concludes the paper.
2. Preliminaries
2.1. Notation
The notation list below defines all the sets, parameters and variables used through
the paper.
Sets
Set of cells
Set of cell links
Set of origin cells
Set of destination cells
Set of cell links on which traffic counts are measured
Set of origin cells of which the downstream cell links where traffic counts
are measured
Set of destination cells of which the upstream cell links where traffic counts
are measured
Set of downstream cells of cell
Set of upstream cells of cell
Set of paths
Set of paths connecting O-D pair -
Set of time intervals
Set of demand departure intervals in demand estimation interval
Set of traffic movement intervals in traffic measurement interval
Parameters
Duration of demand departure interval , where and Duration of traffic movement interval , where and Duration of demand estimation interval , where and is a
positive integer
Duration of traffic measurement interval , where and is a
positive integer
Free-flow speed of cell Backward shockwave speed of cell Maximum number of vehicles (or holding capacity) that can be held in cell
in traffic movement interval
Maximum amount of flows (or flow capacity) going through cell link ( ) in
traffic movement interval
Inclusion indicator of demand departure interval in demand estimation
interval , where if , and otherwise
Inclusion indicator of traffic movement interval in traffic measurement
interval , where if , and otherwise

5
Weighting coefficient of link flow deviations
Weighting coefficient of link flow deviations
Weighting coefficient of link flow deviations
Weighting coefficient of O-D flow entropies
Observed traffic counts going through cell link ( ) in traffic measurement
interval
Observed traffic counts going through the cordon for origin in traffic
measurement interval
Observed traffic counts going through the cordon for destination in traffic
measurement interval
Variables
Traffic flow departing in demand departure interval and traveling along
path from origin to destination
Traffic flow departing in demand estimation interval and traveling along
path from origin to destination , where ∑
Travel demand departing in demand departure interval from origin to
destination , where ∑
Travel demand departing in demand estimation interval from origin to
destination , where
and ∑
Excess travel demand departing in demand departure interval along the
dummy path from origin to destination
Traffic flow going through cell link ( ) in traffic movement interval
Traffic flow going through cell link ( ) in traffic measurement interval ,
where ∑
Number of vehicles in cell in traffic movement interval
Proportion of path flow
going through cell link ( ) in traffic movement
interval
Proportion of path flow
going through cell link ( ) in traffic
measurement interval , where ∑
Travel time of traffic flow departing in demand departure interval and
traveling along path from origin to destination
Travel cost of traffic flow departing in demand departure interval and
traveling along path from origin to destination
Deviation cost of traffic flow departing in demand departure interval and
traveling along path from origin to destination
Entropy cost of traffic flow departing in demand departure interval and
traveling along path from origin to destination
Minimum travel cost of traffic flow departing in demand departure interval
and traveling along all paths from origin to destination in the original network
Given travel cost of traffic flow departing in demand departure interval
and traveling along the dummy path from origin to destination
Minimum travel cost of traffic flow departing in demand departure interval
and traveling along all paths from origin to destination in the expanded
network

6
Deviation of link flow between its estimated and observed values
Deviation of sum of link flows ∑ departing from origin
between its estimated and observed values
Deviation of sum of link flows ∑ arriving at destination
between its estimated and observed values
2.2. Cell transmission model and cell-based network
It is well known that the CTM theory proposed by Daganzo (1994, 1995) offers a
discrete approximation to the classic hydrodynamic traffic flow model of Lighthill
and Whitham (1955) and Richards (1956). According to the theory, any roadway in
a network is discretized into a series of homogeneous cells and time discretized into
a set of equal intervals such that the cell length is equal to the distance traveled in
one time interval by traffic at the free-flow speed. Cell links (or cell connectors) are
constructed to connect adjacent cells along roadways and at junctions/intersections.
Both cells and cell links are directional, as consistent with the given traffic
directions. Any path in a cell-based network is represented by a series of
consecutive cells with the same traffic direction, along which the most upstream cell
is its origin cell and the most downstream cell is its destination cell.
Let us use ( ) to represent a cell-based, time-sliced network, where , and
are the sets of cells, cell links and time intervals, respectively. The sets of origin
cells and destination cells, and , are two special subsets of , i.e., and . The time intervals we refer to here include two types of intervals, namely, the
demand departure intervals and traffic movement intervals ; in our case,
the two types of intervals are equivalent. It should be noted that the demand
departure interval and traffic movement interval are different from the demand
estimation interval and traffic measurement interval, as we will introduce later on.
For now, let us emphasize that in the text hereafter, unless specified, any time
interval we refer to means a demand departure interval, a traffic movement
interval, or both of them, depending on which specification is the most appropriate.
The spatiotemporal relationship of traffic flow variables in a cell-based network can
be specified by the following set of recursive equations along traffic directions:
∑
∑
( ), (1.1)
{ ∑
(
) ∑
}
( ) , (1.2)
Note that the above set of equations synthetically accommodates the traffic flow
conservation and propagation conditions in all the cases, including the linear,
merging and diverging cases. The special cases are for origin and destination cells,

7
which represent the boundary of the network (i.e., origin cells do not have upstream
cells and destination cells do not have downstream cells) and are set with an infinite
capacity (i.e., , and
, ). Following this special
treatment, the flow conservation equation for origin cells and destination cells can
be simplified into the following reduced forms:
∑
∑
, , (2.1)
∑
, (2.2)
where in the first equation above, is the travel demand from origin cell to
destination cell departing in the demand departure interval , and it is noted that
in this equation, the indexes of the demand departure interval and the traffic
movement interval coincide, i.e., .
It should be noted that the above flow conservation equations (i.e., (1.1), (2.1) and
(2.2)) are given on the cell level, which aggregate traffic flows from all relevant
paths. For each path connecting O-D pair - and demand departure interval , a
series of similar time-dependent path-specific flow conservation equations to the
above still hold, as shown below,
, , , , , (3.1)
, , , , (3.2)
, , , , (3.3)
where, by definition, denotes the number of vehicles along path departing
during demand departure interval and arriving at cell during traffic movement
interval ,
represents the traffic flow along path departing
during demand departure interval and going through cell link ( ) during traffic
movement interval , and is the path flow along path departing during
demand departure interval , respectively. The above three flow conservation
functions are applicable to ordinary, origin and destination cells, respectively. Note
here that for any cell along a particular path, there is at most one single upstream
cell and one single downstream cell.
Since its invention, CTM has been extensively used for modeling and solving various
dynamic network equilibrium and optimization problems, such as traffic assignment
(Ziliaskopoulos, 2000; Lo and Szeto, 2002), network design (Waller et al., 2006;
Ukkusuri and Waller, 2008; Chung et al., 2011), signal control (Lo, 2001;
Karoonsoontawong and Waller, 2010), and evacuation planning (Chiu and Zheng,
2007; Yao et al., 2009; Xie et al., 2010b), to just name a few. Needless to say,
8
modeling and solving all these dynamic network problems requires time-dependent
travel demand matrices for cell-based networks. The inherent discrete location and
time settings within cell-based networks provides a natural discretization scheme
for modeling discrete dynamic traffic systems.
2.3. Discrete settings of cell-based networks
By definition, the traffic state (characterized by traffic variables) in any cell or cell
link during any single time interval is time-invariant. Following the time
discretization scheme, time-varying networks with continuous spatial and temporal
variations are approximated by a series of discrete time-invariant network states.
To reflect traffic dynamics with a satisfactorily high precision, the duration of time
intervals is typically set to several seconds. The length of cells is then determined in
terms of the discretization rule required by the CTM theory, as described above.
Other two types of intervals, namely, demand estimation interval and traffic
measurement interval, are often used in dynamic O-D demand estimation problems,
because of some engineering reasons in practice. Demand estimation intervals are
the time intervals for which O-D demands are assumed to be time-invariant or
stable. The duration of a demand estimation interval is typically set as 10 to 30
minutes, depending on the desired modeling fidelity. Typically, the duration should
not be too short to smooth random demand fluctuations. Traffic measurement
intervals specify the frequency at which traffic sensors aggregate and report traffic
states. The duration of traffic measurement intervals often falls into a range of 15
to 60 minutes. For modeling convenience, we set the duration of a demand
estimation interval to be an integer number of times the duration of a demand
departure interval and set the duration of a traffic measurement interval to be an
integer number of times the duration of a traffic movement interval, i.e.,
∑
(4.1)
∑
(4.2)
where and are the number of demand departure intervals in a demand
estimation interval and the number of traffic movement intervals in a traffic
measurement interval, respectively.
These different time intervals discussed above are used for different system
modeling precision requirements. Specifically, traffic dynamics are modeled on a
relatively precise level of several seconds, specified by the demand departure
interval and traffic movement interval, while O-D demand variations are estimated
and traffic flow variations are observed on a relatively coarse level, respectively, of
roughly several to tens of minutes and tens of minutes to several hours. A similar
scheme of using mixed time intervals is employed by, for example, Nie and Zhang
(2008) and Zhou et al. (2012) in their dynamic O-D demand estimation models.
9
Given the above discrete network settings, we are now ready for further specifying
the inherent time-dependent relationships among all traffic flow and demand
variables defined at different time scales. First, by flow conservation, the path flows
and O-D demand for any O-D pair - in each demand departure interval has the
following summation relationship:
∑
, , (5)
where, by definition,
⁄ . The incidence relationship between the link flow
in traffic movement interval and the path flow departing in demand departure
interval is expressed as,
∑∑∑
( ), (6)
where denotes the proportion of path flow
contributing to link flow ,
i.e., the proportion of path flow departing in demand departure interval going
through cell link ( ) in traffic movement interval . By definition, we know that
. It is worth mentioning here that a complete set of
and
information over the whole network and across all time intervals specifies the entire
dynamic network flow pattern. As we will see, the path flow pattern [ ] is a
result of route choices and the path flow proportion pattern [ ] is
determined by the traffic propagation and interaction, which is often characterized
as a dynamic network loading (DNL) process. Furthermore, given ∑ ,
the above path-link relationship can be extended as,
∑∑∑
( ), (7)
where ∑
denotes the proportion of path flow contributing to
link flow , where . As we will see, this extended path-link
relationship is needed in calculating the flow deviations between the observed and
estimated link flows.
Finally, for a complete specification of the feasible region, the flow nonnegativity
constraint is always required:
, , , (8)
2.4. Evaluation of path travel times

10
It is well known that the relationship between traffic flows and travel times, or the
travel time function, is the key performance indicator of evaluating the supply
performance of network components and determining the route choice pattern. For
most dynamic traffic networks, there exists no explicit analytical travel time
function; the cell-based network is not an exclusive case. Given the path choice
pattern over the network, evaluating path travel times typically requires invoking a
numerical DNL process.
A DNL process and a path travel time evaluation procedure for cell-based networks
are well described in Daganzo (1995) and Lo and Szeto (2002). The following text
only presents the most essential information and result. The central scheme of the
path travel time evaluation procedure for cell-based networks is based on the use of
the cumulative departure path flows from origin cells and the cumulative arrival
flows at destination cells. Let denote the cumulative traffic flow departing from
origin cell along path before the end of departure demand interval and the
cumulative flow arriving at destination cell along path before the end of traffic
movement interval :
∑
, , , (9.1)
∑
, , , (9.2)
where ( ) is the last cell link adjacent to destination cell along path . Note that
given the path flow pattern [ ] and the DNL process,
and are the
functions of time interval and time interval , respectively. For discussion
convenience, we write these two functions as
( ) and
( ). Then
let ( ) and (
) be the inverse functions of and
, i.e., ( ) (
)
and ( ) (
). The (average) path travel time of path flow
departing
during demand departure interval can then be calculated as,
∫ [( ) ( ) (
) ( )]
, , , (10)
where, by definition,
is the path flow along path connecting O-D
pair - , departing in demand departure interval . If path flow equals zero, its
corresponding path travel time becomes (
) ( ) (
) ( ),
which is apparently an integer number of times the time interval.
The following property of the defined path travel time is required to ensure the
solution existence of the O-D demand estimation model proposed in the next section.
2.5. Path deviation cost term for least squares
11
As we stated earlier, one of the optimization criteria with the defined O-D demand
estimation problem is to minimize the difference between the observed traffic counts
and their estimated values. In our case, the observed traffic counts include link
counts and cordon counts. Such traffic counts can be collected by a variety of
pavement-embedded or roadside traffic sensors. In an aggregate form, this
minimization principle can be represented by a weighted sum of least squares of the
deviations of all observed and estimated traffic counts over the network:
∑ ∑( )
( )
∑∑( )
∑∑( )
(11.1)
where , , and are defined as,
∑∑∑
( ) , (11.2)
∑ ∑∑∑
, (11.3)
∑ ∑∑∑
, (11.4)
It is noted that each of these least-squares terms is of a special form of the
generalized least-squares estimator (see Cascetta et al., 1993), in which the special
setting is that the variance-covariance matrix is a scalar matrix with its diagonal
entry equal to ⁄ , ⁄ , or ⁄ . The variance-covariance matrix contains
important statistical flow dependence information between locations where traffic
flows are measured. However, very often, the variance-covariance matrix is difficult
to estimate due to data inadequacy, if not impossible. This is also true in our case,
so we use the least-squares instead of generalized least-squares estimator.
Combined together, these least-squares components in the deviation minimization
function will appear in the optimality conditions as the following path deviation cost
term:
∑ ∑
( )
∑
∑
12
, , , (12)
It is noted that the weighting coefficients , and play a projection operation
role, in that they project flow deviations , and to the cost deviation
.
2.6. Path entropy cost term for maximum entropy
In addition to the objective of matching traffic measurements, entropy maximization
is another fundamental optimization principle included in our model for specifying
the primitive nature of the spatial distribution of O-D demands. Wilson (1967, 1969,
1970) first justify the usefulness of entropy maximization in a number of travel
demand analysis problems, such as trip distribution, mode split, and route split.
Anas (1983) proved the equivalence of the aggregate-level entropy maximization
theory and the disaggregate-level utility maximization theory (in the case of the
multinomial logit model) in the context of O-D demand distribution. The maximum-
entropy principle has been frequently used for various O-D demand estimation
problems, when no historical or reference O-D demand matrix is available (see, for
example, Van Zuylen and Willumsen, 1980; Willumsen, 1981, 1984; Xie et al.,
2010a). Following Willumsen (1984), the maximum-entropy function of O-D
demands over a dynamic traffic network can be written as,
∑∑[
( )]
(13.1)
or
∑∑[ (
) ]
(13.2)
where
∑∑
, , (13.3)
Further, similar to Xie et al. (2010a, 2011), we may accordingly introduce a
corresponding path entropy cost term in the optimality conditions to the above
maximum-entropy function, which can be obtained by deriving its first-order
derivative with respect to path flow :
∑ ( )
, , , (14)

13
It is clear that by definition this path entropy cost term implies a certain level
of spatial and temporal homogeneity, in that its value is common to all path flows
traveling from origin to destination and departing during demand estimation
interval . This result implies the condition that introducing the entropy cost term
into the desired optimality conditions does not change the path cost difference
between any pair of path flows connecting the same O-D pair and departing in the
same departure interval, and hence not alter the route choice results and
equilibrium conditions associated with this O-D pair, if compared to the network
equilibrium solution without adding the path entropy cost term. However, the
entropy cost term in general does differ between different O-D pairs.
3. An excess-demand dynamic traffic assignment problem
Given all the required modeling elements in the last section, we are now ready for
discussing an excess-demand network modeling framework, by which the proposed
dynamic O-D demand estimation problem can be solved by repeatedly solving a DTA
problem for an expanded network with excess demands on dummy paths. The
optimality conditions implied by this DTA problem are a compromise result of the
minimization of individual travel times, minimization of traffic count deviations, and
maximization of O-D demand entropies. We first derive its optimality conditions
starting from the prime definition of the widely accepted dynamic user equilibrium
(DUE) conditions.
3.1. Optimality conditions
Ideally, the DUE conditions should be implied in the solution of an O-D demand
estimation problem. In general, this set of conditions can be characterized by the
following nonlinear complementarity system (see Friesz et al., 1993; Smith, 1993; Lo
and Szeto, 2002):
{
(
)
, , , (15)
where
satisfies the constraint set (3)-(8),
is defined in (10), and is the
minimum of all relevant path times, i.e.,
{
} , , (16)
To distinguish it from our alternative equilibrium conditions defined later on, we
term the above equilibrium conditions the ideal dynamic user equilibrium (IDUE),
in which all path travel costs only consist of path travel times.
By taking into account the path deviation cost (resulted from the least-squares
objective) and the path entropy cost (resulted from the maximum-entropy objective),

14
an augmented equilibrium flow pattern may be formed, which represents a
compromise result between prompting the IDUE conditions and achieving the stated
least-squares and maximum-entropy objectives. Interested readers may refer to Nie
and Zhang (2008, 2010), Shen and Wynter (2011), and Xie and Kockelman (2012) for
conceptually similar ideas for static and dynamic networks. We use the augmented
dynamic user equilibrium (ADUE) conditions to term this equilibrium case. Its
corresponding complementarity system is,
{
(
)
, , , (17)
where the path deviation cost
and path entropy cost
follow the previous
definitions in (12) and (14). Note that the path entropy cost is common to all paths
connecting the same O-D pair and departing in the same demand departure
interval.
It is also noted that when
, we have
, which implies
that the ADUE closely approaches an alternative DUE, under which the path costs
evaluated by individual travelers for route choice comprise travel times only.
Compared to the IDUE defined in (15), this alternative DUE merely contains an
additional common path cost
. Apparently, adding this common path cost does
not change the route choice result.
Now let us set as,
, , , (18)
and accordingly name the augmented path travel cost. Following this definition,
the ADUE presented above can be described as: Among the set of paths connecting
the same O-D pair, for the same demand departure interval, all paths carrying a
positive flow have an equal augmented travel cost and any path with a higher
augmented travel cost carries no flow. The remaining work is then to construct a
proper model that can be used to derive the solution corresponding to the augmented
equilibrium conditions and establish its usefulness for the defined O-D demand
estimation problem.
According to Lagrangian relaxation theory, we know that the existence of the
minimum augmented path travel cost (or the augmented O-D travel cost) in the
equilibrium conditions implies that a constant O-D demand (or an O-D demand
function) must be given as input. This requirement, however, conflicts with the
fact that is a decision variable to be estimated in the proposed O-D estimation
problem, which is neither a constant nor a closed-form function of travel costs. To
relax this conflict, we employ a problem transformation and network expansion
strategy, which comprises two operations: 1) assume the existence of a maximum O-

15
D flow for each O-D pair - and each demand departure interval ; 2) add a
dummy path directly connecting each O-D pair - to the network, as shown in
Figure 1, and assume that the travel cost along this dummy path for each demand
departure interval , , is known a priori. It should be noted here that the given
maximum O-D flow here is a sufficiently large constant. By sufficiently large,
we mean that , , , , is larger than what is needed to fully ensure
over the whole network; otherwise, it might result in
, where
{ {
}
}. In the expanded network with dummy paths, the proposed
dynamic O-D estimation problem is transformed to a DTA problem that embraces
the augmented equilibrium conditions defined above.
Figure 1 Network expansion by adding dummy paths to connect O-D pairs
Following the conventional terminology fashion (see Sheffi, 1985, for example), we
call the travel demand going through the dummy path the excess demand of O-D
pair - . In accordance, the augmented DTA problem is named the excess-demand
DTA problem. Given the upper bound of travel demand for each O-D pair, ,
the following flow conservation relationship applies to the excess-demand DTA
problem,
, , (19)
where ∑
and
are the O-D demand to be estimated and the excess
demand of O-D pair - during demand departure interval , respectively. Following
this problem transformation, we can see that the original dynamic O-D estimation
problem can now be solved by equivalently solving the excess-demand DTA problem,
if a set of proper augmented O-D travel costs for all O-D pairs and all demand
departure intervals are supplied.
The following text formally defines the excess-demand DTA problem for the
expanded network and states its solution equivalence to the desired optimality
conditions, i.e., the ADUE conditions.
r s
Dummy path

16
Definition 1. The excess-demand DTA problem for the expanded network with
dummy paths is defined in terms of the following feasible solution set, flow-cost
relationship, and individual travel behavior. The expanded network virtually
includes two parts: An original network part and a dummy path part, where the
dummy path part comprises a set of dummy paths and each dummy path is
constructed for one and only one O-D pair. The solution set of this problem is
formed by constraints (3)-(8) and (19). The travel cost functions have two forms: 1)
is employed for path connecting O-D pair - and
departing during demand departure interval in the original network part; 2) is
a given constant associated with the dummy path connecting O-D pair - and
departing during demand departure interval . By definition, we know that any
ADUE solution implies
, given that is sufficiently large. As for the
individual behavior, it is still simply a dynamic version of the Wardropian user
equilibrium principle based on the augmented path costs. □
For the expanded network with dummy arcs, the ADUE conditions are accordingly
redefined as:
{
(
)
(
)
, , , (20)
The problem transformation and network expansion scheme we proposed above is
inspired by Shen and Wynter’s (2011) recent work of estimating O-D demand
matrices for static traffic networks, in which the key modeling component, i.e., the
added term of a set of given O-D travel costs, is adopted from Nguyen’s (1977)
methodological development and Turnquist and Gur’s (1979) implementation work.
However, a few major modeling differences distinguish our work from theirs, in
addition to different input data requirements and travel cost structures: 1) Our
method is applicable to dynamic traffic networks, while Shen and Wynter’s is for
static networks; 2) we define an upper bound on the travel demand of each O-D pair
and formulate the transformed problem as a fixed-demand traffic assignment
problem for the expanded network, while the transformed problem in their case is
treated as an elastic-demand problem; 3) we note that their model suffers the
solution non-uniqueness issue, which can be seen from the fact that the to-be-
estimated O-D demand variables appear in a linear term in the objective function of
their model, while our model is not subject to the non-uniqueness deficiency (see
Theorem 2 in Subsection 3.2). This non-uniqueness issue also arises from Nguyen’s
original model. LeBlanc and Farhangian (1982) suggested a least-squares method to
overcome this deficiency, with a target O-D demand matrix provided. In our case,
due to the introduction of a maximum-entropy term, which is typically used in the
cases of no target demand matrix available, the solution non-uniqueness issue is
automatically eliminated.

17
3.2. A variational inequality formulation
Given the inherent asymmetry and nonadditivity of travel time functions, the
excess-demand DTA problem in general cannot be written into an optimization
formulation. Therefore, we resort to a VI model to characterize the problem’s
equilibrium conditions suggested above. Of course, VI is not the only modeling
choice; other general equilibrium modeling techniques, such as nonlinear
complementarity problems, fixed-point problems, or gap (or merit) function-based
optimization problems, can be potentially used for constructing an appropriate
model here (see Facchinei and Pang, 2003).
The proposed VI model is expressed as: For all ( ) , where [ ], [
],
and is the feasible solution set confined by constraints (3)-(8) and (19), find
( ) such that
∑∑[∑
(
)
(
)]
(21)
where
is the equilibrium augmented travel cost of path
connecting O-D pair - in the original network part for demand departure
interval , and is the given travel cost of the dummy path connecting O-D pair -
for demand departure interval .
Note that in the ideal traffic count matching case (i.e., all
values approach
zero), a proper value of should be the sum of
{
}
, where
is a function of or
(shown in (14)). While may be collected by probe
vehicles, license plate recognition techniques, or electronic toll collection systems,
is difficult to measure. After all, itself is the to-be-estimated variable of the
model. Due to this reason, an estimation method is required to determine the
value. This task will be accomplished in the next section. The remaining text in
this section proves the proposed VI model’s solution equivalence to the ADUE
conditions defined in (20).
Theorem 1. A path flow pattern ( ) , where [
] and [ ],
solves the VI problem in (21), if and only if ( ) satisfies the ADUE conditions
defined in (20).
Proof. We first establish the sufficiency. If satisfies the ADUE conditions, it can
be characterized by,
{
, , ,

18
Similarly, can be characterized by the above complementarity system as well.
Now suppose that we have another feasible solution ( ) . It is readily seen
that the following inequality holds by comparing the total cost between ( ) and ( ) for O-D pair - ,
∑
∑
, ,
∑
(
)
(
) , ,
since the
is the lowest path cost among all the paths (including the
dummy path) connecting O-D pair - for demand departure interval . Summing
up the above inequality associated with each O-D pair and time interval results in
the VI problem in (21).
We then establish the necessity. Suppose that ( ) is a solution of the VI
problem, but it does not satisfy the ADUE conditions. The latter assumption means
that for some path connecting O-D pair - and departing demand departure
interval , the following condition appears:
{
The same assumption can be applied to the dummy path connecting each O-D pair.
Let us reassign path flow
from path to another path with its cost equal to
and denote the resulting new path flow pattern ( ). Because
as well
as
, , , , , and
, , , (or
, , , , , and
, , , ), the following inequality holds,
∑∑[∑
]
∑∑[∑
]
which contradicts with the inequality of the VI problem. □
4. An iterative solution procedure
On the basis of the problem transformation and network expansion strategy, it is
now clear that our solution approach for solving the dynamic O-D demand
estimation problem involves two major algorithmic steps: 1) finding a proper set of
dummy path costs ; 2) solving the excess-demand DTA problem in the expanded
network. The section elaborates these algorithmic developments.

19
4.1. An iterative combinatorial algorithm for inferring dynamic network flows
Note that the excess-demand DTA problem presented in (21) is simply an ordinary
DTA problem for cell-based networks except that the path costs of its dummy paths
are given as constants and the path costs of its real paths comprise of travel times,
traffic count deviations, and demand entropies. The fix of constant path costs can be
implemented by setting the free-flow travel time along the dummy path equal to the
given constant and setting its capacity to infinity. To accommodate the time
dependence of the path cost of each dummy path, the only extra modeling
requirement is to allow its free-flow travel time to be time-dependent. Moreover, in
a cell-based network, if the adjustment of the dummy path’s free-flow travel time is
implemented by adding or removing a number of cells along the dummy path, the
excess-demand DTA problem can be solved by any existing solver for cell-based
dynamic networks.
Nevertheless, the excess-demand DTA problem can be solved by a number of
different solution methods, including conventional relaxation methods, projection
methods and their variants, which can all be described as an iterative convergent
optimization procedure, and combinatorial optimization methods, which assign
individual vehicles in a discrete manner.
Our particular interest is given to a combinatorial optimization method, which was
recently proposed by Waller and Ziliaskopoulos (2006) for single-destination DTA
problems and extended by Golani and Waller (2004) for general multi-destination
problems. Following the assumption that on any arc the travel time experienced by
a given vehicle is not affected by any vehicle behind it, the single-destination
combinatorial method achieves the equilibrium by assigning vehicles individually
into the network in the time order by a time-dependent shortest path algorithm and
simultaneously reducing the capacity of all cells and cell links occupied by assigned
vehicles. The multi-destination version employs a Gauss-Seidel decomposition
scheme to sequentially compute the equilibrium flow pattern for each destination.
The time-dependent shortest path algorithm is the core algorithmic step of the
combinatorial methods. While the single-destination procedure guarantees the
optimality of the traffic assignment solution (if the tiny rounding error introduced by
the discrete assignment is ignored), the multi-destination procedure is merely an
approximate algorithm, since it may not guarantee the first-in-first-out (FIFO) order
through the network between vehicles destined to different destinations. Given the
discrete nature of the combinatorial optimization method, its solution is an
approximation to the naturally continuous flow solution of the CTM model.
As a generalization to the work by Waller and Ziliaskopoulos (2006), we developed a
similar combinatorial optimization method for multi-destination DTA problems.
This method poses an exact solution procedure for a certain type of acyclic network
topologies and an approximate procedure for general network topologies. The
following text gives a brief description of its essential features and explains how it is
applied to the DTA problem defined in this paper.
Different from the all-to-one shortest path algorithm used in the single-destination
method, the core algorithmic procedure of our multi-destination method is an all-to-

20
all shortest-earliest path algorithm. This algorithm finds one or more shortest-
earliest paths, each of which is not only the shortest one among all paths connecting
the same O-D pair, but also the one arriving at any common node earliest among all
paths over the network. The key operation for the latter requirement is to compare
the arrival times of individual vehicles from different origins to different
destinations at each merging node and only assign those vehicles into the network
which arrive at each of their passing nodes earlier than any other potential arriving
vehicles. The optimal solutions of multi-destination DTA problems are ensured by
this shortest-earliest path algorithm for acyclic networks. Though the acyclic
requirement seems a very strict assumption, the resulting exact combinatorial
method is still applicable to general traffic networks with topological cycles, if some
preliminary path selection or elimination procedure is used to remove cycles for each
O-D pair prior to the execution of the shortest-earliest path algorithm.
In our case, an added algorithmic task for solving the proposed excess-demand DTA
problem is to take into account traffic count deviations in the shortest-earliest path
search process. Recall that the travel costs of the defined DTA problem comprise
travel times, traffic count deviations, and demand entropies (see Subsections 2.4, 2.5
and 2.6). The entropy cost is common to all paths connecting a single O-D pair, so
its value does not impact path choices. We are only concerned about path travel
times and path deviation costs in the path search. Note that travel times are
evaluated for roadway segments in terms of individual traffic movements, while
traffic count deviations are aggregated flow evaluation results at some roadway
points. As a result, path deviation costs affect individual path choices, but not the
order of individual vehicles moving in the traffic stream. The simultaneous
consideration of travel times and deviation costs results in a more sophisticated path
search process for the defined DTA problem. In particular, each time of performing
the dynamic programming operations in the all-to-all shortest-earliest path search,
the path arriving at a merging node with the lowest sum of travel time and
deviation cost should be selected among all paths connecting the same O-D pair; for
paths connecting different O-D pairs, the path arriving at a merging node in the
earliest time should be selected. Such operations form a two-step algorithmic
process.
Moreover, according to its definition, we know that the path deviation cost can be
numerically evaluated only after the network flows are assigned (refer to (12)).
Because of this reason, the one-time combinatorial method, which is designed for
DTA problems in terms of travel times only, cannot be directly applied for solving
the defined DTA problem in this paper, but merely serves as a subroutine in a more
general DTA solution framework—the method of successive averages (MSA).
Given that the MSA procedure is an iterative convergent process, embedding the
combinatorial method into this iterative solution framework results in an iterative
combinatorial optimization procedure. Its major algorithmic steps can be sketched
as follows:

21
Step 0: Solve the defined excess-demand DTA problem with all by the
combinatorial method. Calculate ( )
in terms of ( )
, ( )
, ( )
, and ( )
. Set
.
Step 1: Solve the defined DTA problem with ( )
, which generates a network flow
pattern ( )
, ( )
, ( )
, and ( )
.
Step 2: Find the new network flow pattern by setting ( ) ( )
( )
( )
, ( )
( ) ( )
( )
, ( )
( ) ( )
( )
, and ( )
( ) ( )
( )
.
Step 3: Update ( )
in terms of ( )
, ( )
, ( )
, and ( )
.
Step 4: If solution convergence is obtained, stop the procedure; otherwise, set
and go to step 1.
It is noted that the above MSA procedure employs a fixed step size . In our
numerical experiment below, 0.5 is used.
4.2. An iterative heuristic for determining dummy path costs
The remaining algorithmic concern is on the derivation of an appropriate set of time-
dependent costs of dummy paths. An iterative heuristic procedure similar to Shen
and Wynter (2011) is sketched below for this purpose.
Step 0: Initialize ( ) by setting it to be an overestimated value of
, i.e.,
( )
, , , , where denotes the dummy path cost for O-D pair - and
demand departure interval corresponding to the optimal solution of the problem.
Set .
Step 1: Solve the excess-demand DTA problem with ( )
, , , , by the
combinatorial algorithm introduced above.
Step 2: Compute ( )
{
( )
( )}, , , , where
( ) is the
path travel time and ( )
is the path entropy cost. Here, ( )
can be readily
retrieved from executing a time-dependent shortest path algorithm.
Step 3: If ∑ ∑ | ( )
( )
| | || |⁄ , where is the prespecified allowable
convergence gap, or , where is a prespecified maximum iteration number,
stop the iteration; otherwise, go to Step 4.
Step 4: Set ( )
( )
, , , , and , and go to step 1.
From the above iterative procedure, we can clearly see that the adjustment of the
dummy path cost occurs at step 4, which resets it to the minimum sum of path
travel time and path entropy deviation cost
, as calculated at step 2. Given
that is common to all paths connecting the same O-D pair in the same demand
departure interval, the updated value is actually subject to the minimum path

22
travel time {
}. The underlying reason of selecting the path with
{
} is that its and
values tend to be closest to
and
among
all used paths connecting the same O-D pair in the same demand departure interval.
Given ( )
, the to-be-estimated demand
( ) (by solving the excess-
demand DTA problem) is typically overestimated, i.e., ( )
, as well as the
relevant path flows and link flows, i.e., ( )
and ( )
. This
overestimation also implies a potential overestimation of path travel times and
count matching errors, i.e., ( )
and ( )
, where
approaches zero in the ideal case. Note that the number of links along different
paths is different. Therefore, under the ADUE conditions, the path with
{
} is the one with {
}, which indicates that it is potentially
the path with the most overestimation of
and the least overestimation of
and
.
In summary, combining the iterative combinatorial algorithm for solving the excess-
demand DTA problem and the iterative heuristic for adjusting dummy path costs,
the overall algorithmic procedure is a heuristic. The next section presents the
results we obtained from evaluating the solution performance of this heuristic
procedure through an example problem.
5. An illustrative experiment
We developed computer code for all the above algorithmic procedures in the
MATLAB computing language. For the evaluation purpose, we hypothesized an
example problem of simple topology and small size, through which one can readily
track the flow variation in any cell and analyze the flow distribution during any time
interval so as to further understand the network behaviors and algorithmic insights
in a straightforward way. This example problem is provided mainly for the
methodologically illustrative rather than computational purpose.
The example problem is specified as follows. First, the duration of the time interval
used in the example problem, which is either the demand departure interval or the
traffic movement interval, is set as 10 s; we also set the durations of the demand
estimation interval and the traffic measurement interval equal to 20 s. The traffic
network used in the problem is given in Figure 2, which depicts both the arc-based
and cell-based topologies. We assume the length of each arc equal to 600 m, the
free-flow speed on all arcs equal to 30 m/s (= 67.1 mph), and the ratio of the
backward shockwave speed over the free-flow speed is 1.0. Given the duration of the
traffic movement interval equal to 10 s, each arc is exactly discretized into two cells.
We further assume the holding capacity of all cells except cells 7 and 8 as well as the
origin and destination cells is equal to 20 veh and the maximum flow rate of all cell
links excluding cell links -7, 7-8, and 8- is equal to 2 veh/s; the holding capacity
of cells 7 and 8 is 40 veh and the maximum flow rate of the above exclusive cell links
is 4 veh/s. In addition, as a common rule, the capacity of origin and destination cells
is set to be infinite.
23
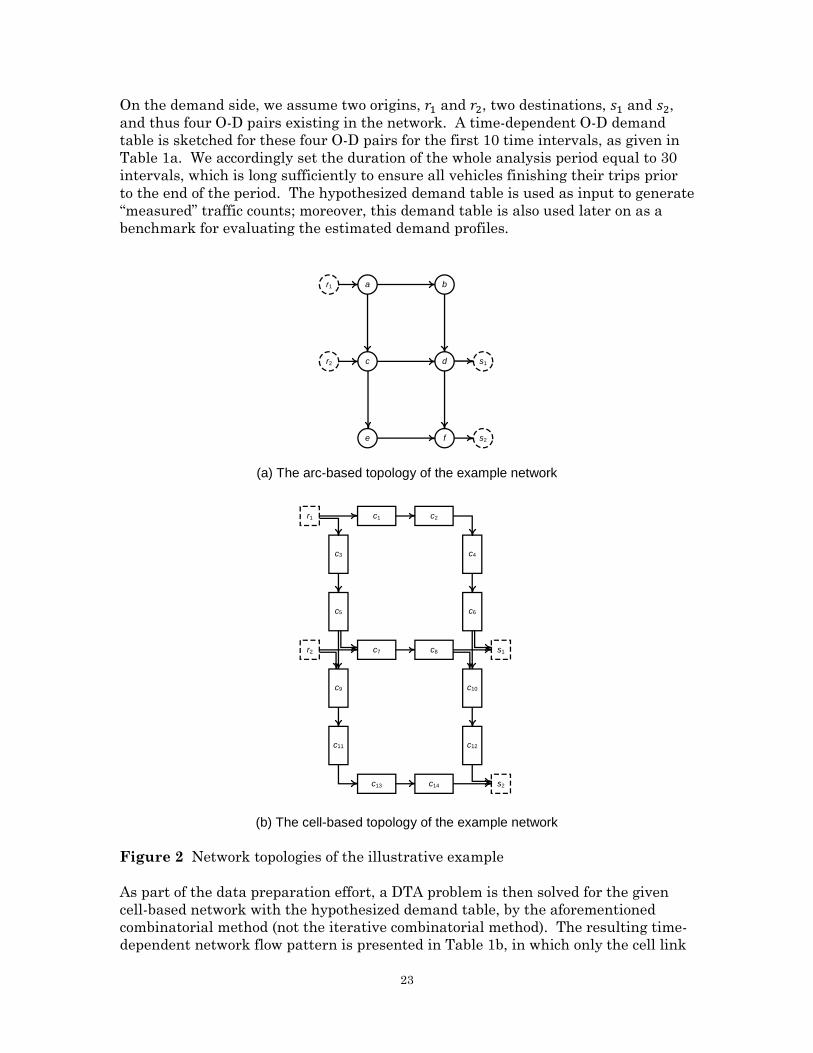
On the demand side, we assume two origins, and , two destinations, and ,
and thus four O-D pairs existing in the network. A time-dependent O-D demand
table is sketched for these four O-D pairs for the first 10 time intervals, as given in
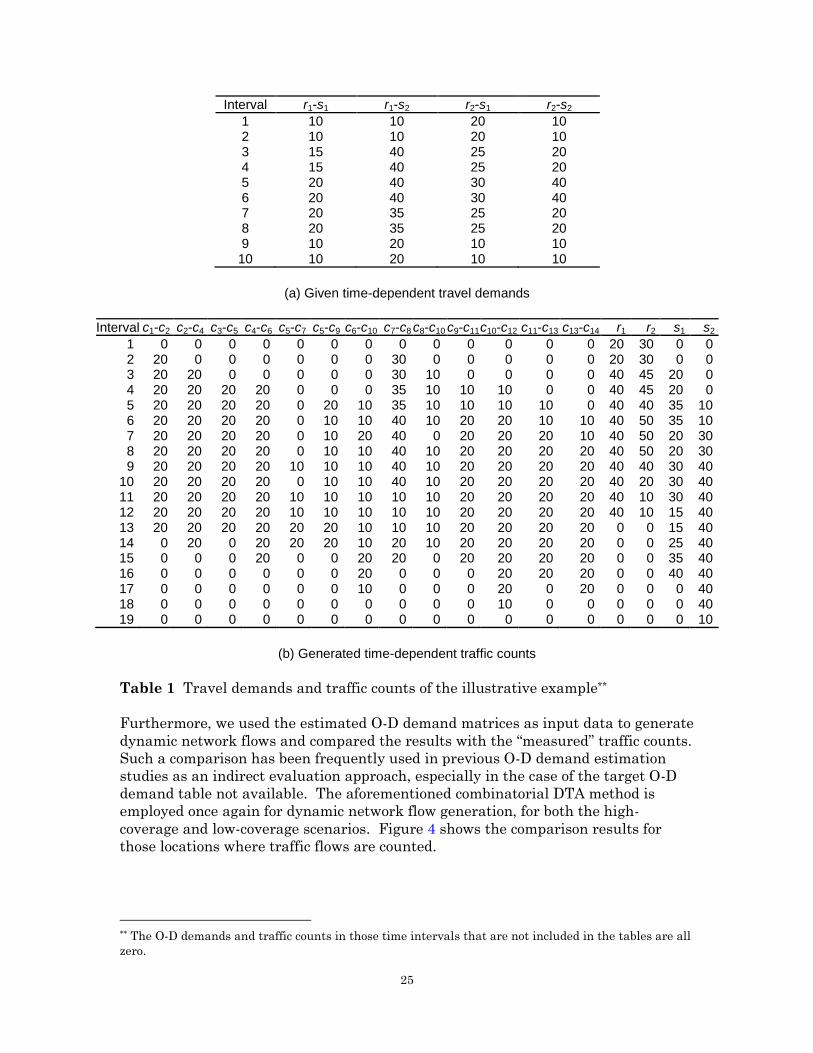
Table 1a. We accordingly set the duration of the whole analysis period equal to 30
intervals, which is long sufficiently to ensure all vehicles finishing their trips prior
to the end of the period. The hypothesized demand table is used as input to generate
“measured” traffic counts; moreover, this demand table is also used later on as a
benchmark for evaluating the estimated demand profiles.
(a) The arc-based topology of the example network
(b) The cell-based topology of the example network
Figure 2 Network topologies of the illustrative example
As part of the data preparation effort, a DTA problem is then solved for the given
cell-based network with the hypothesized demand table, by the aforementioned
combinatorial method (not the iterative combinatorial method). The resulting time-
dependent network flow pattern is presented in Table 1b, in which only the cell link
a
c
b
d
e f
r1
r2 s1
s2
c1 c2
c3
c5
c7 c8
c4
c6
c9
c11
c10
c12
c13 c14
r1
r2 s1
s2

24
flows, outgoing origin flows, and incoming destination flows are listed. The flows
through some cell links and origin/destination cordons are aggregated and saved as
“measured” link or cordon counts for the O-D demand estimation problem. For the
sake of comparison, we assume two data availability scenarios: 1) a high-coverage
scenario; 2) a low-coverage scenario. In the first scenario, traffic counts are
measured at origins and and on cell links - , - , - , - and - .
Note that the cordon count at any origin is the sum of relevant link flows, i.e.,
and . In the second scenario, we
assume that traffic counts are measured only on cell links - , - , - and -
. We also assume that traffic counts are accurately measured for all time
intervals without any measurement noise.
In addition to the supply and demand data given above, a set of modeling
parameters need to be specified for the proposed solution procedure. Two sets of
parameters 0.1 and 0.05 are assumed*. These parameters are
weighting coefficients used to convert path deviation costs to path travel times and
to convert path entropy costs to path travel times, respectively.
The experiment of applying the iterative solution procedure for the two scenarios
was conducted with the convergence gap 0.001 and the maximum iteration
number 50. In the application, the iterative procedure stops when either of the
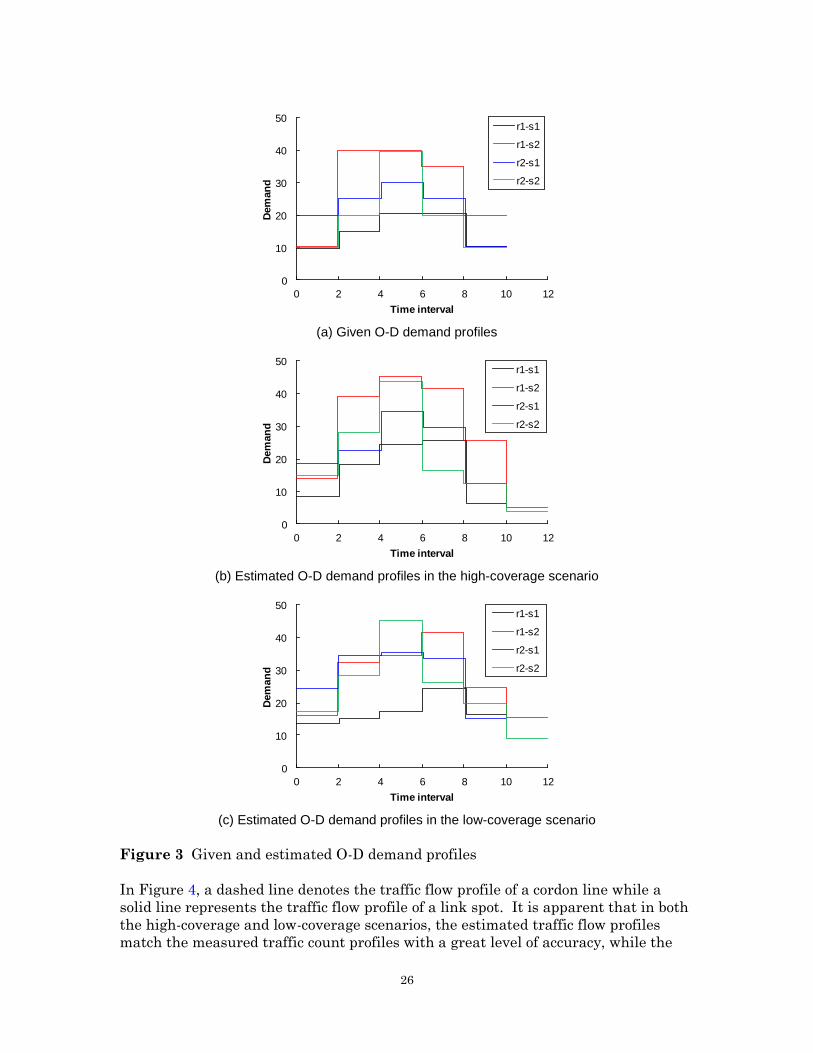
convergence criteria is satisfied. The obtained demand estimation results of all O-D
pairs from the two scenarios are depicted in Figure 3 and are evaluated by
comparing them with the given O-D demand profiles from Table 1.
Note here that the O-D demands are estimated in terms of the demand estimation
interval (rather than the demand departure interval ). For this example
problem, we set , as mentioned previously, so the demand profiles in
Figure 3 show a time-varying pattern with a step of two time intervals. The
estimation performance is assessed by simply comparing the given and estimated O-
D demand profiles. First, we observed that the two estimated O-D demand profiles
capture the temporal pattern of the given profiles on a certain level of accuracy,
though the estimation accuracy seems to vary quite largely across O-D pairs. In
particular, the demand profile of O-D pair - is estimated relatively better than
other O-D pairs in both the scenarios. The possible reason is due to the simple
structure of this O-D pair, in that it has only one path. Second, we noted that the
demand estimation result in the high-coverage scenario is apparently better than
that in the low-coverage scenario. This observation is consistent with our common
sense that higher network coverage of traffic measurements provides more
information about the network flows and hence produces a better estimation result if
these measurements are not biased. As an aggregated comparison, we calculated
the root mean square error (RMSE) of the estimated O-D demands against the given
O-D demands for both the scenarios. The calculation result shows that the RMSE of
the high-coverage scenario is 4.29 veh per interval while the RMSE of the low-
coverage scenario is 6.25 veh per interval.
* It should be noted that these parameter values are arbitrarily specified for this small example.
25
Interval r1-s1 r1-s2 r2-s1 r2-s2
1 10 10 20 10 2 10 10 20 10 3 15 40 25 20 4 15 40 25 20 5 20 40 30 40 6 20 40 30 40 7 20 35 25 20 8 20 35 25 20 9 10 20 10 10 10 10 20 10 10
(a) Given time-dependent travel demands
Interval c1-c2 c2-c4 c3-c5 c4-c6 c5-c7 c5-c9 c6-c10 c7-c8 c8-c10 c9-c11 c10-c12 c11-c13 c13-c14 r1 r2 s1 s2
1 0 0 0 0 0 0 0 0 0 0 0 0 0 20 30 0 0 2 20 0 0 0 0 0 0 30 0 0 0 0 0 20 30 0 0 3 20 20 0 0 0 0 0 30 10 0 0 0 0 40 45 20 0 4 20 20 20 20 0 0 0 35 10 10 10 0 0 40 45 20 0 5 20 20 20 20 0 20 10 35 10 10 10 10 0 40 40 35 10 6 20 20 20 20 0 10 10 40 10 20 20 10 10 40 50 35 10 7 20 20 20 20 0 10 20 40 0 20 20 20 10 40 50 20 30 8 20 20 20 20 0 10 10 40 10 20 20 20 20 40 50 20 30 9 20 20 20 20 10 10 10 40 10 20 20 20 20 40 40 30 40
10 20 20 20 20 0 10 10 40 10 20 20 20 20 40 20 30 40 11 20 20 20 20 10 10 10 10 10 20 20 20 20 40 10 30 40 12 20 20 20 20 10 10 10 10 10 20 20 20 20 40 10 15 40 13 20 20 20 20 20 20 10 10 10 20 20 20 20 0 0 15 40 14 0 20 0 20 20 20 10 20 10 20 20 20 20 0 0 25 40 15 0 0 0 20 0 0 20 20 0 20 20 20 20 0 0 35 40 16 0 0 0 0 0 0 20 0 0 0 20 20 20 0 0 40 40 17 0 0 0 0 0 0 10 0 0 0 20 0 20 0 0 0 40 18 0 0 0 0 0 0 0 0 0 0 10 0 0 0 0 0 40 19 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 10
(b) Generated time-dependent traffic counts
Table 1 Travel demands and traffic counts of the illustrative example**
Furthermore, we used the estimated O-D demand matrices as input data to generate
dynamic network flows and compared the results with the “measured” traffic counts.
Such a comparison has been frequently used in previous O-D demand estimation
studies as an indirect evaluation approach, especially in the case of the target O-D
demand table not available. The aforementioned combinatorial DTA method is
employed once again for dynamic network flow generation, for both the high-
coverage and low-coverage scenarios. Figure 4 shows the comparison results for
those locations where traffic flows are counted.
** The O-D demands and traffic counts in those time intervals that are not included in the tables are all
zero.
26
(a) Given O-D demand profiles
(b) Estimated O-D demand profiles in the high-coverage scenario
(c) Estimated O-D demand profiles in the low-coverage scenario
Figure 3 Given and estimated O-D demand profiles
In Figure 4, a dashed line denotes the traffic flow profile of a cordon line while a
solid line represents the traffic flow profile of a link spot. It is apparent that in both
the high-coverage and low-coverage scenarios, the estimated traffic flow profiles
match the measured traffic count profiles with a great level of accuracy, while the
0
10
20
30
40
50
0 2 4 6 8 10 12
Dem
an
d
Time interval
r1-s1
r1-s2
r2-s1
r2-s2
0
10
20
30
40
50
0 2 4 6 8 10 12
Dem
an
d
Time interval
r1-s1
r1-s2
r2-s1
r2-s2
0
10
20
30
40
50
0 2 4 6 8 10 12
Dem
an
d
Time interval
r1-s1
r1-s2
r2-s1
r2-s2

27
average match error in the high-coverage scenario appears considerably lower. In
particular, the RMSE values of the estimated traffic flows against the measured
traffic counts in the two scenarios are 3.69 and 4.22 veh per interval, respectively.
This result is consistent with the above O-D demand comparison result.
(a) Measured cordon and link flow profiles
(b) Estimated cordon and link flow profiles in the high-coverage scenario
(c) Estimated link flow profiles in the low-coverage scenario
Figure 4 Measured and estimated cordon and link flow profiles
0
10
20
30
40
50
0 5 10 15 20 25 30
Tra
ffic
flo
w
Time interval
c1-c2
c3-c5
c10-c12
c13-c14
0
10
20
30
40
50
0 5 10 15 20 25 30
Tra
ffic
co
un
t
Time interval
r1
r2
c1-c2
c3-c5
c7-c8
c10-c12
c13-c14
0
10
20
30
40
50
0 5 10 15 20 25 30
Tra
ffic
flo
w
Time interval
r1
r2
c1-c2
c3-c5
c7-c8
c10-c12
c13-c14

28
The above numerical results merely summarize our initial observation on the
performance of the proposed excess-demand DTA approach for estimating O-D
demand matrices. The developed modeling and solution framework should be
further applied to problems of larger size and with a variety of different network
settings in terms of network topology, road capacity, demand level, and so on. Given
that the solution procedure is a de facto process of repeatedly solving an excess-
demand DTA problem, we are also interested in building the framework based on an
existing DTA solver (e.g., Visual Interactive System for Transportation Applications
(VISTA)†) that can solve large-scale network problems in a reasonable timeframe.
In addition, other tests are worth being conducted to examine the effect or
sensitivity of various modeling parameters or components, such as the demand
estimation interval length, the traffic measurement interval length, the weighting
coefficients, and the traffic flow model used in the DTA process. Till these tests are
sufficiently conducted, we will then be able to have a more thorough understanding
about the estimator’s behavioral and accuracy performance and may gain additional
insights about how to further improve its performance.
6. Concluding remarks
This paper presents a new composite equilibrium approach for the dynamic O-D
demand matrix estimation problem, in which its underlying equilibrium conditions
are a synthetic result of minimization of individual routing costs, minimization of
traffic count matching errors, and maximization of O-D demand entropies. The
composite equilibrium conditions are characterized by a VI model, and in
accordance, the solution existence, equivalence and uniqueness of the O-D demand
estimation problem are proved by the VI techniques. To relax the solution
complexity, the O-D demand estimation problem is reformulated as an excess-
demand DTA problem defined for an expanded network with dummy paths, by
supplying an upper bound of travel demand and a dummy path cost for each O-D
pair and each time interval. The excess-demand formulation enables us to apply
existing DTA solution methods for inferring the path flow pattern in the expanded
network and thus estimating O-D demand matrices for the original network. We
sketched an iterative solution procedure, which resorts to repeatedly solving the
excess-demand DTA problem and adjusting the dummy path costs. The
computational bottleneck of this procedure lies in solving the excess-demand DTA
problem. In our implementation, an iterative combinatorial algorithm is suggested
for the DTA solutions.
It should be emphasized that the proposed modeling and solution framework is quite
general in the sense of its applicability and modularity, in which the traffic
dynamics can be modeled by other network flow models than the CTM theory. In
our case, as we have seen, two optimization criteria, namely, minimization of
squared traffic count errors and maximization of O-D demand entropies, are
incorporated into the composite equilibrium conditions. When needed, other
analytical or statistical optimization principles could be introduced into the model in
† The Network Modeling Center at University of Texas at Austin uses VISTA as a routine DTA
software package for many dynamic network analysis and demand forecasting applications.

29
a similar way. On the solution side, alternative analytical or simulation-based DTA
solution methods and dummy path cost adjustment procedures can be potentially
inserted into the iterative solution procedure. A set of experiments of implementing
and comparing different solution algorithms for these two tasks should be further
conducted to identify the most effective and efficient solution procedure.
Acknowledgements
This research is funded by Texas Department of Transportation (TxDOT) and
Capital Area Metropolitan Planning Organization (CAMPO) through the Network
Modeling Center at University of Texas at Austin. The first author is also supported
by a research grant along with his Young Talent Award from the China Recruitment
Program of Global Experts and a research grant from the State Key Laboratory of
Ocean Engineering at Shanghai Jiao Tong University (Grant No.: GKZD010061).
The authors are grateful to the Editor-in-Chief, Professor Terry Friesz, and two
anonymous referees for their constructive suggestions. However, the authors claim
that they are solely responsible for the facts and the accuracy of the data presented
herein.
References
Anas, A. 1983. Discrete choice theory, information theory, and the multinomial logit
and gravity models. Transportation Research Part B, 17(1), 13-23.
Bell, M.G.H., Shield, C.M., Busch, F. and Kruse, G. 1997. A stochastic user
equilibrium path flow estimator. Transportation Research Part B, 5(3/4), 197-210.
Cascetta, E., Inaudi, D. and Marquis, G. 1993. Dynamic estimators of origin-
destination matrices using traffic counts. Transportation Science, 27(4), 363-373.
Chiu, Y.C. and Zheng, H. 2007. Real-time mobilization decisions for multi-priority
emergency response resources and evacuation groups: Model formulation and
solution. Transportation Research Part E, 43(6), 710-736.
Choi, K., Jayakrishan, R., Kim, H., Yang, I. and Lee, J. 2009. Dynamic origin-
destination estimation using dynamic traffic simulation model in an urban arterial
corridor. Transportation Research Record, 2133, 133-141.
Chung, B.D., Yao, T., Xie, C. and Thorsen, A. 2011. Robust optimization model for a
dynamic network design problem under demand uncertainty. Networks and Spatial
Economics, 11(2), 371-389.
Cipriani, E., Florian, M., Mahut, M. and Nigro, M. 2011. A gradient approximation
approach for adjusting temporal origin-destination matrices. Transportation
Research Part C, 19(2), 270-282.

30
Daganzo, C.F. 1994. The cell transmission model: A simple dynamic representation
of highway traffic consistent with the hydrodynamic theory. Transportation
Research Part B, 28(4), 269-287.
Daganzo, C.F. 1995. The cell transmission model, part II: Network traffic.
Transportation Research Part B, 29(2), 79-93.
Facchinei, F. and Pang, J.S. 2003. Finite-Dimensional Variational Inequalities and
Complementarity Problems: Volume I. Springer-Verlag, New York, NY.
Friesz, T.L., Bernstein, D., Smith, T.E., Tobin, R.L. and Wei, B.W. 1993. A
variational inequality formulation of the dynamic network equilibrium problem.
Operations Research, 41(1), 179–191.
Golani, H. and Waller, S.T. 2004. Combinatorial approach for multiple-destination
user optimal dynamic traffic assignment. Transportation Research Record, 1882, 70-
78.
Karoonsoontawong, A. and Waller, S.T. 2010. Integrated network capacity
expansion and traffic signal optimization problem: Robust bi-level dynamic
formulation. Networks and Spatial Economics, 10(4), 525-550.
Kattan, L. and Abdulhai, B. 2006. Noniterative approach to dynamic traffic origin-
destination estimation with parallel evolutionary algorithms. Transportation
Research Record, 1964, 201-210.
LeBlanc, L.J. and Farhangian, K. 1982. Selection of a trip table which reproduces
observed link flows. Transportation Research Part B, 16(2), 83-88.
Lighthill, M.J. and Whitham, G.B. 1955. On kinematic waves II: A theory of traffic
flow on long crowded roads. Proceedings of the Royal Society of London, Series A:
Mathematical and Physical Sciences, 229(1178), 317-345.
Lo, H.K. 2001. A cell-based traffic control formulation: Strategies and benefits of
dynamic timing plans. Transportation Science, 35(2), 148-164.
Lo, H.K. and Szeto, W.Y. 2002. A cell-based variational inequality formulation of the
dynamic user optimal assignment problem. Transportation Research Part B, 36(5),
421-433.
Mahut, M., Florian, M., Tremblay, N., Campbell, M., Patman, D. and McDaniel, Z.K.
2004. Calibration and application of a simulation-based dynamic traffic assignment
model. Transportation Research Record, 1876, 101-111.
Nie, Y. 2006. A Variational Inequality Approach for Inferring Dynamic Origin-
Destination Travel Demands. Ph.D. Thesis, Department of Civil and Environmental
Engineering, University of California, Davis, CA.
31
Nie, Y. and Zhang, H.M. 2008. A variational inequality formulation for inferring
dynamic origin-destination travel demands. Transportation Research Part B, 42(7-
8), 635-662.
Nie, Y. and Zhang, H.M. 2010. A relaxation approach for estimating origin–
destination trip tables. Networks and Spatial Economics, 10(1), 147-172.
Nguyen, S. 1977. Estimating an O-D Matrix from Network Data: A Network
Equilibrium Approach. Publication No. 87, Centre de Recherche sur les Transports,
Université de Montréal, Montreal, QC.
Richards, P.I. 1956. Shock waves on the highway. Operations Research, 34(1), 42-51.
Sheffi, Y. 1985. Urban Transportation Networks: Equilibrium Analysis with
Mathematical Programming Methods. Prentice-Hall, Englewood Cliffs, NJ.
Shen, W. and Wynter, L. 2011. A New One-Level Convex Optimization Approach for
Estimating Origin-Destination Demand. IBM Research Report RC25147, Thomas J.
Watson Research Center, Yorktown Heights, NY.
Smith, M.J. 1993. A new dynamic traffic model and the existence and calculation of
dynamic user equilibria on congested capacity-constrained road networks.
Transportation Research Part B, 26(1), 49–63.
Spiess, H. 1990. A Gradient Approach for the O-D Matrix Adjustment Problem.
Publication No. 693, Centre de Recherche sur les Transports, Université de
Montréal, Montreal, QC.
Tavana, H. 2001. Internally Consistent Estimation of Dynamic Network Origin-
Destination Flows from Intelligent Transportation Systems Data Using Bi-Level
Optimization. Ph.D. Thesis, Department of Civil Engineering, University of Texas,
Austin, TX.
Turnquist, M.A. and Gur, Y. 1979. Estimation of trip tables from observed link
volumes. Transportation Research Record, 730, 1-6.
Ukkusuri, S. and Waller, S.T. 2008. Linear programming models for the user and
system optimal dynamic network design problem: Formulations, comparisons and
extensions. Networks and Spatial Economics, 8(4), 383-406.
Van Zuylen, H.J. and Willumsen, L.G. 1980. The most likely trip matrix estimated
from traffic counts. Transportation Research Part B, 14(3), 281-293.
Waller, S.T., Mouskos, K.C., Kamaryiannis, D. and Ziliaskopoulos, A.K. 2006. A
linear model for the continuous network design problem. Computer-Aided Civil and
Infrastructure Engineering, 21(5), 334-345.
32
Waller, S.T. and Ziliaskopoulos, A.K. 2006. A combinatorial user optimal dynamic
traffic assignment algorithm. Annals of Operations Research, 144(1), 249-261.
Willumsen, L.G. 1981. Simplified transport models based on traffic counts.
Transportation, 10(3), 257-278.
Willumsen, L.G. 1984. Estimating time-dependent trip matrices from traffic counts.
Proceedings of the 9th International Symposium on Transportation and Traffic
Theory, Delft, The Netherlands, 397-411.
Wilson, A.G. 1967. A statistical theory of spatial distribution models. Transportation
Research, 1(3), 253-269.
Wilson, A.G. 1969. The use of entropy maximising models in the theory of trip
distribution, mode split and route split. Journal of Transport Economics and Policy,
3(1), 108-126.
Wilson, A.G. 1970. Entropy in Urban and Regional Modelling. Pion, London,
England.
Xie, C. and Kockelman, K.M. 2012. Two-stage equilibrium travel demand model for
sketch planning. Transportation Research Record, 2302, 1-13.
Xie, C., Kockelman, K.M. and Waller, S.T. 2010a. Maximum entropy method for
subnetwork origin-destination trip matrix estimation. Transportation Research
Record, 2196, 111-119.
Xie, C., Kockelman, K.M. and Waller, S.T. 2011. A maximum entropy-least squares
estimator for elastic origin-destination trip matrix estimation. Transportation
Research Part B, 45(9), 1465-1482.
Xie, C., Lin, D.Y. and Waller, S.T. 2010b. A dynamic evacuation network
optimization problem with lane reversal and crossing elimination strategies.
Transportation Research Part E, 46(3), 295-316.
Yao, T., Mandala, S.R. and Chung, B.D. 2009. Evacuation transportation planning
under uncertainty: A robust optimization approach. Networks and Spatial
Economics, 9(2), 171-189.
Zhou, X. 2004. Dynamic Origin-Destination Demand Estimation and Prediction for
Offline and Online Dynamic Traffic Assignment Operation. Ph.D. Thesis,
Department of Civil and Environmental Engineering, University of Maryland,
College Park, MD.
Zhou, X., Lu, C.C. and Zhang, K. 2012. Dynamic origin-destination demand flow
estimation under congested traffic conditions. Proceedings of the 91st Transportation
Research Board Annual Meeting, Washington, DC.
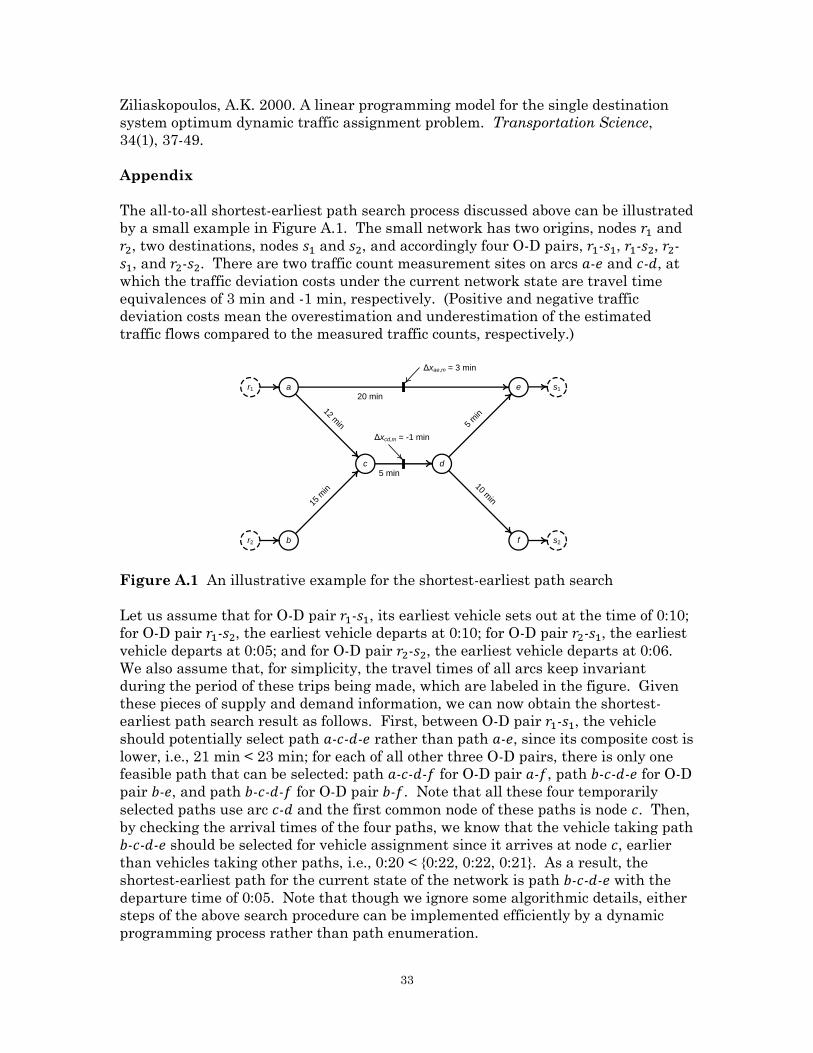
33
Ziliaskopoulos, A.K. 2000. A linear programming model for the single destination
system optimum dynamic traffic assignment problem. Transportation Science,
34(1), 37-49.
Appendix
The all-to-all shortest-earliest path search process discussed above can be illustrated
by a small example in Figure A.1. The small network has two origins, nodes and
, two destinations, nodes and , and accordingly four O-D pairs, - , - , -
, and - . There are two traffic count measurement sites on arcs - and - , at
which the traffic deviation costs under the current network state are travel time
equivalences of 3 min and -1 min, respectively. (Positive and negative traffic
deviation costs mean the overestimation and underestimation of the estimated
traffic flows compared to the measured traffic counts, respectively.)
Figure A.1 An illustrative example for the shortest-earliest path search
Let us assume that for O-D pair - , its earliest vehicle sets out at the time of 0:10;
for O-D pair - , the earliest vehicle departs at 0:10; for O-D pair - , the earliest
vehicle departs at 0:05; and for O-D pair - , the earliest vehicle departs at 0:06.
We also assume that, for simplicity, the travel times of all arcs keep invariant
during the period of these trips being made, which are labeled in the figure. Given
these pieces of supply and demand information, we can now obtain the shortest-
earliest path search result as follows. First, between O-D pair - , the vehicle
should potentially select path - - - rather than path - , since its composite cost is
lower, i.e., 21 min < 23 min; for each of all other three O-D pairs, there is only one
feasible path that can be selected: path - - - for O-D pair - , path - - - for O-D
pair - , and path - - - for O-D pair - . Note that all these four temporarily
selected paths use arc - and the first common node of these paths is node . Then,
by checking the arrival times of the four paths, we know that the vehicle taking path
- - - should be selected for vehicle assignment since it arrives at node , earlier
than vehicles taking other paths, i.e., 0:20 < {0:22, 0:22, 0:21}. As a result, the
shortest-earliest path for the current state of the network is path - - - with the
departure time of 0:05. Note that though we ignore some algorithmic details, either
steps of the above search procedure can be implemented efficiently by a dynamic
programming process rather than path enumeration.
a
c
e
d
b f
r1
r2
s1
s2
Δxae,m = 3 min
20 min
5 min
12 min
15 m
in
5 m
in
10 min
Δxcd,m = -1 min