
An evaluation of LIDAR and IFSAR-derived digital elevation models in leaf-on conditions with USGS...
14
An evaluation of LIDAR- and IFSAR-derived digital elevation models in leaf-on conditions with USGS Level 1 and Level 2 DEMs Michael E. Hodgson a, * , John R. Jensen a , Laura Schmidt b , Steve Schill c , Bruce Davis d a Department of Geography, University of South Carolina, Columbia, SC 29208, USA b Baruch Marine Science Laboratory, Georgetown, SC 29585, USA c GeoMetrics, Inc., Columbia, SC 29210, USA d Earth Science Applications Directorate, NASA Stennis Space Center, Stennis, MS 39529, USA Received 17 July 2001; received in revised form 24 July 2002; accepted 27 July 2002 Abstract An assessment of four different remote sensing based methods for deriving digital elevation models (DEMs) was conducted in a flood- prone watershed in North Carolina. New airborne LIDAR (light detecting and ranging) and IFSAR (interferometric synthetic aperture radar (SAR)) data were collected and corresponding DEMs created. These new sources were compared to two methods: Gestalt Photomapper (GPM) and contour-to-grid, used by the U.S. Geological Survey (USGS) for creating DEMs. Survey-grade points (1470) for five different land cover classes were used as reference points. One unique aspect of this study was the LIDAR and IFSAR data were collected during leaf- on conditions. Analyses of absolute elevation accuracy and terrain slope were conducted. The LIDAR- and contour-to-grid derived DEMs exhibited the highest overall absolute elevation accuracies. Elevation accuracy was found to vary with land cover categories. Elevation accuracy also decreased with increasing slopes—but only for the scrub/shrub land cover category. Appreciable terrain slope errors for the reference points were found with all methods. D 2002 Elsevier Science Inc. All rights reserved. Keywords: LIDAR; IFSAR; DEM; Elevation accuracy 1. Introduction Many hydrologic, vegetation science, and urban planning applications use digital elevation models (DEMs) to obtain absolute surface elevation and terrain form (e.g., slope, aspect) information (Jensen, 2000). The most widely adop- ted DEMS in the United States are the 30 30 m Level 1 DEMs produced by the U.S. Geological Survey (USGS) using photogrammetric techniques (Hodgson, 1998). More accurate USGS Level 2 DEMs are available for selected geographic areas. During the past decade, there has been a significant increase in the production of DEMs using air- borne LIDAR (light detection and ranging) and IFSAR (interferometric synthetic aperture radar) remote sensing techniques (Jensen, 2000). This situation forces scientists or applied users who want to incorporate a DEM into their study to carefully consider the source of the DEM. Impor- tant questions to be addressed when selecting a DEM include: 1. What is the absolute elevation accuracy of the digital elevation information that can be extracted from the DEM using a certain type of technology (e.g., in situ ground survey, photogrammetry, LIDAR, IFSAR)? 2. What is the accuracy of the surface form (e.g., slope) derived from the DEM? 3. Does the absolute elevation and/or surface form accuracy covary with land cover and/or slope? 4. Is the DEM derived using a certain type of technology more accurate if it is obtained during leaf-on or leaf-off conditions? There is considerable conflicting information about many of these considerations available today. What is needed is a rigorous comparison of the strengths and weaknesses of DEMs derived using the various alternative remote sensing technologies so that the user may know which is the most appropriate DEM to utilize. To this end, 0034-4257/02/$ - see front matter D 2002 Elsevier Science Inc. All rights reserved. PII:S0034-4257(02)00114-1 * Corresponding author. www.elsevier.com/locate/rse Remote Sensing of Environment 84 (2003) 295 – 308
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of An evaluation of LIDAR and IFSAR-derived digital elevation models in leaf-on conditions with USGS...
An evaluation of LIDAR- and IFSAR-derived digital elevation models in
leaf-on conditions with USGS Level 1 and Level 2 DEMs
Michael E. Hodgsona,*, John R. Jensena, Laura Schmidtb, Steve Schillc, Bruce Davisd
aDepartment of Geography, University of South Carolina, Columbia, SC 29208, USAbBaruch Marine Science Laboratory, Georgetown, SC 29585, USA
cGeoMetrics, Inc., Columbia, SC 29210, USAdEarth Science Applications Directorate, NASA Stennis Space Center, Stennis, MS 39529, USA
Received 17 July 2001; received in revised form 24 July 2002; accepted 27 July 2002
Abstract
An assessment of four different remote sensing based methods for deriving digital elevation models (DEMs) was conducted in a flood-
prone watershed in North Carolina. New airborne LIDAR (light detecting and ranging) and IFSAR (interferometric synthetic aperture radar
(SAR)) data were collected and corresponding DEMs created. These new sources were compared to two methods: Gestalt Photomapper
(GPM) and contour-to-grid, used by the U.S. Geological Survey (USGS) for creating DEMs. Survey-grade points (1470) for five different
land cover classes were used as reference points. One unique aspect of this study was the LIDAR and IFSAR data were collected during leaf-
on conditions. Analyses of absolute elevation accuracy and terrain slope were conducted. The LIDAR- and contour-to-grid derived DEMs
exhibited the highest overall absolute elevation accuracies. Elevation accuracy was found to vary with land cover categories. Elevation
accuracy also decreased with increasing slopes—but only for the scrub/shrub land cover category. Appreciable terrain slope errors for the
reference points were found with all methods.
D 2002 Elsevier Science Inc. All rights reserved.
Keywords: LIDAR; IFSAR; DEM; Elevation accuracy
1. Introduction
Many hydrologic, vegetation science, and urban planning
applications use digital elevation models (DEMs) to obtain
absolute surface elevation and terrain form (e.g., slope,
aspect) information (Jensen, 2000). The most widely adop-
ted DEMS in the United States are the 30� 30 m Level 1
DEMs produced by the U.S. Geological Survey (USGS)
using photogrammetric techniques (Hodgson, 1998). More
accurate USGS Level 2 DEMs are available for selected
geographic areas. During the past decade, there has been a
significant increase in the production of DEMs using air-
borne LIDAR (light detection and ranging) and IFSAR
(interferometric synthetic aperture radar) remote sensing
techniques (Jensen, 2000). This situation forces scientists
or applied users who want to incorporate a DEM into their
study to carefully consider the source of the DEM. Impor-
tant questions to be addressed when selecting a DEM
include:
1. What is the absolute elevation accuracy of the digital
elevation information that can be extracted from the
DEM using a certain type of technology (e.g., in situ
ground survey, photogrammetry, LIDAR, IFSAR)?
2. What is the accuracy of the surface form (e.g., slope)
derived from the DEM?
3. Does the absolute elevation and/or surface form accuracy
covary with land cover and/or slope?
4. Is the DEM derived using a certain type of technology
more accurate if it is obtained during leaf-on or leaf-off
conditions?
There is considerable conflicting information about
many of these considerations available today. What is
needed is a rigorous comparison of the strengths and
weaknesses of DEMs derived using the various alternative
remote sensing technologies so that the user may know
which is the most appropriate DEM to utilize. To this end,
0034-4257/02/$ - see front matter D 2002 Elsevier Science Inc. All rights reserved.
PII: S0034 -4257 (02 )00114 -1
* Corresponding author.
www.elsevier.com/locate/rse
Remote Sensing of Environment 84 (2003) 295–308

research was conducted in cooperation with the North
Carolina Geodetic Survey. A high priority watershed in
North Carolina susceptible to flooding during hurricanes
was selected for analysis. The geodetic survey collected
1470 in situ x,y,z measurements within the watershed.
Absolute elevation and terrain form derived from USGS
Level 1 and 2 DEMs and from LIDAR and IFSAR-derived
DEMs obtained during leaf-on conditions were compared
with the in situ measurements. The goal of this study was
to obtain an unbiased assessment of the utility of the
various remote sensing-derived DEMS.
2. Methods of creating a digital elevation model
Digital elevation models may be produced using in situ
measurements, photogrammetrically derived measurements
from stereo-correlation, LIDAR laser measurements, and
IFSAR active microwave measurements. The following
sections summarize how the IFSAR, LIDAR, and USGS
Level 1 and 2 DEMs are derived. Previous research con-
ducted on DEM accuracy associated with each of the
technologies is presented wherever available.
2.1. Digital elevation models derived using interferometric
synthetic aperture radar—IFSAR
Elevation has been mapped from both satellite and air-
craft synthetic aperture radars (SARs) since the 1960s
(Jensen, 2000). A SAR synthetically simulates a very long
antenna using the forward movement of the aircraft. Aircraft
or spacecraft carrying SARs also record data from onboard
differentially corrected global positioning systems (GPS)
and an inertial navigation systems (INS) to determine the
location and roll, pitch, and yaw of the craft.
This study focuses on the use of a special type of SAR
called an interferometric synthetic aperture radar (IFSAR) to
derive topographic information. IFSAR exploits the coher-
ent nature of SAR echoes (i.e., the signals are recorded in
both amplitude and phase) to measure difference in the
phase from each patch of the surface when observed from
slightly different locations and/or times. These phase differ-
ences can be attributed to differences in path length between
the two signals. The path-length differences are a function
of: (1) the distance and angles of the radar antennas making
the observations, (2) the topography of the surface, (3) a
change in the position of patches of the surface, and (4)
differences in atmospheric or ionospheric conditions along
the two paths. If the two observations are made simulta-
neously from a pair of radar antennas on a single platform,
item (1) above is well known and the effects of items (3) and
(4) are negligible, leaving item (2), the surface topography,
as the controlling factor (Plaut, Rivard, & D’lorio, 1999).
Therefore, a fixed-baseline dual-antenna interferometric
system is the preferred method for the extraction of DEMs.
The Shuttle Radar Topography Mission (SRTM) is based on
the use of two antennae on the same platform (JPL, 1999) as
is Intermap’s STAR 3i IFSAR used in this investigation.
SAR data have an implicit spatial resolution defined by
the pulse length, flying height, and depression angle (Jen-
sen, 2000). The slant range resolution of SAR data is 1/2
the pulse length. The ground range resolution is defined as
the slant range resolution divided by the cosine of the
depression angle. These two resolutions describe the reso-
lution analogous to the pixel size in remotely sensed
imagery or the ‘‘footprint’’ in LIDAR data (to be dis-
cussed). The more coarse the IFSAR spatial resolution,
the more difficult it is to produce accurate ‘‘bald earth’’
digital elevation models, especially through continuous
forest canopy cover. Directly sensing the earth surface
beneath vegetated canopies requires using a short pulse
length that penetrates through ‘‘holes’’ in the canopy and/or
a longer wavelength. A characteristic of X-band (3 cm
wavelength) radar is that it penetrates only part way into
forest canopy. Longer wavelengths penetrate further, and
there is ongoing research into long-wavelength interferom-
etry. It is not yet clear what accuracies may be achieved,
and under what conditions.
Image data from a fully focused SAR have a limiting
spatial resolution (in the along track direction) determined
by the system bandwidth and the antenna length. Typically,
the resolution is broadened by an averaging process known
as ‘multi-looking,’ which has the effect of reducing
unwanted speckle in the image. The elevation values from
IFSAR are averages from the scatterers within the same
image pixel. Normally the elevation ‘pixels’ are further
averaged over surrounding samples to reduce the random
elevation ‘noise’ in the data set. For example, the image
resolution of the STAR-3i system is f 2.5 m, while the
elevation sample spacing (i.e., the elevation ‘posting’) in the
DEM is usually set at 5 m. The vertical accuracy of the
DEM is determined by several factors associated with
random noise and systematic effects. Many of these error
factors are proportional to the flying height of the IFSAR.
Thus, the lower the flying height, the better the elevation
accuracy, although there is negligible effect on the spatial
resolution of the imagery. It should be noted that each
IFSAR elevation sample corresponds to a ‘cell average’ so
that the DEM is a regular grid of adjacent samples. This is in
contrast to LIDAR, where samples (footprints) are smaller
in size and may be separated from each other by several
meters depending on operational parameters. In either case,
the coarser the DEM, the more difficult it is to correctly
represent topographic expression.
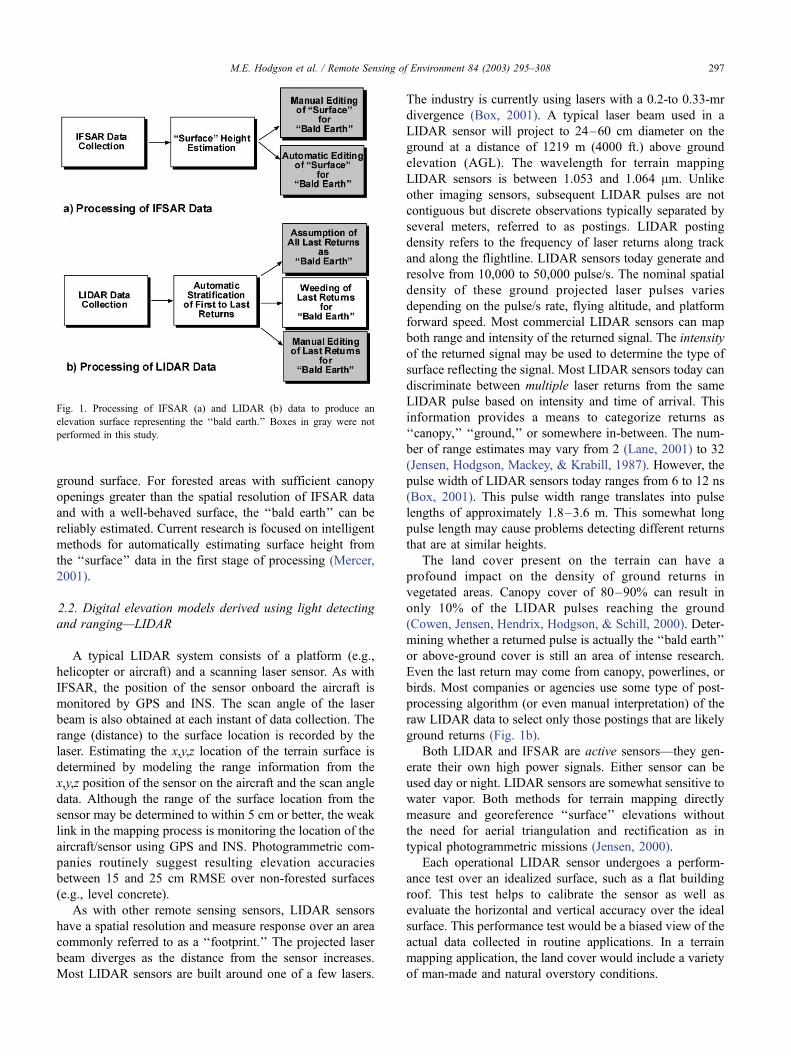
To overcome the canopy cover problem, IFSAR data for
elevation mapping purposes may be processed in stages
(Fig. 1a). The first stage is to collect the IFSAR data and
determine the range of the ‘‘surface.’’ For unforested areas,
this ‘‘surface’’ is at (or very near) the actual ‘‘bald earth’’
(Mercer, 2001). In forested areas, the use of ancillary data
(e.g., aerial photographs or other imagery) may help in
separating the ‘‘expected’’ forest canopy height from the
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308296
ground surface. For forested areas with sufficient canopy
openings greater than the spatial resolution of IFSAR data
and with a well-behaved surface, the ‘‘bald earth’’ can be
reliably estimated. Current research is focused on intelligent
methods for automatically estimating surface height from
the ‘‘surface’’ data in the first stage of processing (Mercer,
2001).
2.2. Digital elevation models derived using light detecting
and ranging—LIDAR
A typical LIDAR system consists of a platform (e.g.,
helicopter or aircraft) and a scanning laser sensor. As with
IFSAR, the position of the sensor onboard the aircraft is
monitored by GPS and INS. The scan angle of the laser
beam is also obtained at each instant of data collection. The
range (distance) to the surface location is recorded by the
laser. Estimating the x,y,z location of the terrain surface is
determined by modeling the range information from the
x,y,z position of the sensor on the aircraft and the scan angle
data. Although the range of the surface location from the
sensor may be determined to within 5 cm or better, the weak
link in the mapping process is monitoring the location of the
aircraft/sensor using GPS and INS. Photogrammetric com-
panies routinely suggest resulting elevation accuracies
between 15 and 25 cm RMSE over non-forested surfaces
(e.g., level concrete).
As with other remote sensing sensors, LIDAR sensors
have a spatial resolution and measure response over an area
commonly referred to as a ‘‘footprint.’’ The projected laser
beam diverges as the distance from the sensor increases.
Most LIDAR sensors are built around one of a few lasers.
The industry is currently using lasers with a 0.2-to 0.33-mr
divergence (Box, 2001). A typical laser beam used in a
LIDAR sensor will project to 24–60 cm diameter on the
ground at a distance of 1219 m (4000 ft.) above ground
elevation (AGL). The wavelength for terrain mapping
LIDAR sensors is between 1.053 and 1.064 Am. Unlike
other imaging sensors, subsequent LIDAR pulses are not
contiguous but discrete observations typically separated by
several meters, referred to as postings. LIDAR posting
density refers to the frequency of laser returns along track
and along the flightline. LIDAR sensors today generate and
resolve from 10,000 to 50,000 pulse/s. The nominal spatial
density of these ground projected laser pulses varies
depending on the pulse/s rate, flying altitude, and platform
forward speed. Most commercial LIDAR sensors can map
both range and intensity of the returned signal. The intensity
of the returned signal may be used to determine the type of
surface reflecting the signal. Most LIDAR sensors today can
discriminate between multiple laser returns from the same
LIDAR pulse based on intensity and time of arrival. This
information provides a means to categorize returns as
‘‘canopy,’’ ‘‘ground,’’ or somewhere in-between. The num-
ber of range estimates may vary from 2 (Lane, 2001) to 32
(Jensen, Hodgson, Mackey, & Krabill, 1987). However, the
pulse width of LIDAR sensors today ranges from 6 to 12 ns
(Box, 2001). This pulse width range translates into pulse
lengths of approximately 1.8–3.6 m. This somewhat long
pulse length may cause problems detecting different returns
that are at similar heights.
The land cover present on the terrain can have a
profound impact on the density of ground returns in
vegetated areas. Canopy cover of 80–90% can result in
only 10% of the LIDAR pulses reaching the ground
(Cowen, Jensen, Hendrix, Hodgson, & Schill, 2000). Deter-
mining whether a returned pulse is actually the ‘‘bald earth’’
or above-ground cover is still an area of intense research.
Even the last return may come from canopy, powerlines, or
birds. Most companies or agencies use some type of post-
processing algorithm (or even manual interpretation) of the
raw LIDAR data to select only those postings that are likely
ground returns (Fig. 1b).
Both LIDAR and IFSAR are active sensors—they gen-
erate their own high power signals. Either sensor can be
used day or night. LIDAR sensors are somewhat sensitive to
water vapor. Both methods for terrain mapping directly
measure and georeference ‘‘surface’’ elevations without
the need for aerial triangulation and rectification as in
typical photogrammetric missions (Jensen, 2000).
Each operational LIDAR sensor undergoes a perform-
ance test over an idealized surface, such as a flat building
roof. This test helps to calibrate the sensor as well as
evaluate the horizontal and vertical accuracy over the ideal
surface. This performance test would be a biased view of the
actual data collected in routine applications. In a terrain
mapping application, the land cover would include a variety
of man-made and natural overstory conditions.
Fig. 1. Processing of IFSAR (a) and LIDAR (b) data to produce an
elevation surface representing the ‘‘bald earth.’’ Boxes in gray were not
performed in this study.
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308 297
As noted earlier, most applications involve weeding the
returns (i.e., the overstory) to select only ‘‘ground’’ points
from which to construct a terrain model. This process is
often called ‘‘vegetation removal’’ when the goal is to map
the terrain surface. The methodologies and algorithms are
proprietary. In general, however, each company will take the
set of LIDAR pulse ‘‘returns’’ categorized by the instrument
and identify those returns that have the characteristics of a
‘‘ground return.’’ Such identification typically involves a
combination of (1) human interpretation of the three-dimen-
sional scatter of points and (2) an automated procedure for
vegetation detection. The automated procedures use a spa-
tial filter to identify locally low elevations under the
assumptions these represent the ground. The methodology
for vegetation removal in this study, for instance, used an
automated procedure first followed by a human operator
further refining the identified ground points.
Pereira and Janssen (1999) evaluated low-altitude (240
m) LIDAR data collected from the Saab TopEye system.
Using very level reference surfaces of bare soil and low
grass, the authors found an RMSE of 10 and 16 cm,
respectively.
2.3. USGS DEMs
The U.S. Geological Survey has long been a major
producer of DEMs for the United States. During the past
25 years, the USGS has used four primary methods for
creating DEMs that are categorized into three levels of
quality—Levels 1, 2, and 3 (Maune, 1996; USGS, 1986).
The four methods for producing these three quality levels
are (1) manual profiling, (2) automatic correlation, (3)
contour-to-grid interpolation, and (4) integrated contour-
to-grid interpolation. Each production method uses a unique
combination of source materials and processing methods
that can result in unique problems or artifacts.
DEMs were a byproduct of the early orthophotoquads
produced by the USGS. The manual profiling method of
DEM production required that the operator view a stereo-
model while keeping the floating and moving ‘‘slit’’ on the
terrain surface. Photographic content in the slit was trans-
ferred to the orthophotoquad while removing the relief
displacement (Thrower & Jensen, 1976). Vertical motions
of the floating slit were recorded as elevation heights
thereby producing the DEM. The classic examples of
artifacts produced from the manual profiler method include
the horizontal striping (erroneous changes in elevation from
north to south) from adjacent slit paths (Garbrecht & Starks,
1995). These artifacts are often so great that cartographic
research has focused on the automated identification and
reduction of the errors (Brown & Bara, 1994).
The automated stereocorrelation technique was used
extensively by the USGS for creating DEMs from black/
white stereopairs of aerial photography. This Gestalt Photo-
mapper (GPM) method (Kelly, McConnell, & Milden-
berger, 1977) was fundamentally based on the same
assumptions as current stereocorrelation techniques. Eleva-
tions are estimated from the relief displacement of areas
within the stereomodel. A USGS 7.5-min DEM was created
from two stereomodels of NHAP (USGS, 1986). Within
each stereomodel, small patches (8 or 9 mm on a side of the
original photo) were correlated at a time (Kok, Blais, &
Rangayyan, 1987). For each point, a smaller kernel of pixels
(e.g., 24� 24 or 40� 40 pixels) centered at the point from
one photograph is matched to its corollary on the opposite
photograph. Any noted horizontal displacement of the
kernel pairs is a measure of the surface height. The set of
mass points produced in this process was not a perfect
lattice so a spatial interpolation of a regular lattice was
performed. The mass points from the two models were
merged and resampled to a 30� 30 m grid. The resultant
DEM was edited for water bodies. In addition, minor errors
identified through visualizing the terrain (i.e., through
shaded-relief, stereomodel, or hypsometric tinting) were
corrected. The obvious deficiency in this DEM production
method was reliance on the photograph image to represent
the ‘‘bald earth.’’ The GPM-derived DEMs represent what-
ever ‘‘surface’’ is apparent on the photographs, including
bare ground, vegetation canopy, man-made construction,
etc. In addition, notable artifacts were produced at the
boundaries of the larger patches and over areas of poor
contrast (e.g., water). Some methods have been developed
to improve the elevation values from GPM-derived DEMs
(Kok et al., 1987).
Two different contour-to-grid interpolation algorithms
(Yoeli, 1986) have been used to create DEMs of higher
quality (i.e., Levels 2 and 3). The CTOG (Zycor, 1983) and
Linetrace algorithms were used to interpolate the regular
spacing of grid points from Digital Line Graph (DLG)
contours. The contour lines typically come from 1:24,000
scale or 1:100,000 scale topographic maps or directly from
the stereomodel of aerial photos. Similar to the evaluation of
Level 1 DEMs, these data are also smoothed for consistency
and any obvious artifacts are removed. The vertical accu-
racy and representation of surface slope in the Level 2
DEMs is typically improved over the Level 1 DEMs. Level
2 DEMs do not suffer from the horizontal striping intro-
duced during the manual profiling method or from edges
between patches produced during stereocorrelation. Some
have noticed, however, that the interpolated grids may have
a bias toward greater frequency of elevations coinciding
with the contour line elevations (Acevedo, 1991; Guth,
1999).
Currently, the highest quality DEMs (i.e., Level 3 DEMs)
from USGS are created by contour-to-grid interpolation
constrained by other planimetric/vertical information. These
other ancillary data sources may include hydrographic
features, breaklines, drainlines, ridgelines, and vertical/hor-
izontal control networks (USGS, 1986). For Level 3 DEMs,
the interpolated elevation values are constrained by all
hydrographic features within a DLG hydrography category
and the cell elevations are ‘‘tilted’’ consistent with the
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308298

direction of stream flow (USGS, 1984). Only contour-to-
grid interpolation methods are currently (2001) being used
by the USGS for creating DEMs.
All large-scale DEMs produced by the USGS undergo a
quality analysis that includes computation of accuracy
(USGS, 1986). A minimum of 28 reference points are used
to determine the RMSE for each 7.5-min quad-based DEM.
The outcome of the accuracy assessment is used to establish
whether the DEM meets the target goal of the National Map
Accuracy Standards (NMAS) a 90% threshold level. An
RMSE of 15 m is the maximum allowed for Level 1 DEMs.
The intent is to reserve the Level 1 designation for those
DEMs produced directly from the NHAP/NAPP photogra-
phy (GPM or manual profiler methods). Level 2 and 3
DEMs have a maximum RMSE of 1/2 and 1/3 the contour
interval, respectively. In addition, the RMSE of Level 2 and
3 DEMs should not exceed 7 m, regardless of the contour
interval.
Bolstad and Stowe (1994) evaluated a GPM-derived
DEM in Virginia and found a mean absolute (i.e., unsigned)
elevation error of 4.5 m. The mean signed error was positive
indicating an overprediction of elevation values. This find-
ing was not surprising since the area was predominately
forested and the GPM-derived DEM would model the
canopy surface. Gao (1995) found elevation error increases
with increasing slope. Gong, Li, Zhu, Sui, and Zhou (2000)
noted a general, but inconsistent, relationship between
increasing elevation error and increasing slope angle. Bol-
stad and Stowe also found that slope errors in their GPM-
derived DEM increased with increasing slope. Chang and
Tsai (1991) found that errors in modeled slope angle were
greater in areas of higher slopes.
Using a 7 1/4-min USGS DEM in Virginia, MacEachren
and Davidson (1987) evaluated the relationship between
sampling density and accuracy of interpolated DEMs. As
sampling density increased mean elevation error also
decreased. A positive relationship between elevation accu-
racy and density was empirically derived. Chang and Tsai
(1991) evaluated the relationship between slope/aspect esti-
mations and sampling resolutions (from 20 to 80 m). They
found the accuracy of the estimated slope and aspect angles
increased with increasing data density. Gong et al. (2000)
recently found the elevation accuracy increases with
increasing data density in a linear fashion.
Recent work by Kenward, Lettenmaier, Wood, and
Fielding (2000) with a GPM-based DEM for an area of
moderate topography in Pennsylvania indicates the refer-
ence hydrologic area matches the USGS DEM-derived
hydrologic area well. However, the authors noted a drainage
pattern that suffers from the patch edge problems in the
GPM process.
A seldom recognized observation of the USGS DEMs is
that the values are always represented as integers (i.e., the
whole foot or meter). Because of the use of integers, the
modeled slope for areas of limited relief may show artificial
‘‘jumps’’ in slope over short distances (Carter, 1992).
3. Methodology
No research to date has evaluated the accuracy of U.S.
Geological Survey Level 2 DEMs, and LIDAR and IFSAR-
derived DEMs over a controlled watershed during leaf-on
conditions. One of the main reasons such research has not
taken place is that it is expensive to obtain the LIDAR and
IFSAR data. In addition, there is the added expense of
obtaining unbiased, accurate ground reference information
that is required to perform a rigorous error assessment.
Finally, few studies have examined the influence of land
cover on the accuracy of these remote sensing-derived
DEMs.
3.1. Study area
In the spring of 2000, a joint project between the NASA
Affiliate Research Center at the University of South Caro-
lina and the State of North Carolina was conducted to
evaluate the performance of several remotely sensed sources
for creating digital elevation models. In part, the goal was to
evaluate the derived products for creating a statewide digital
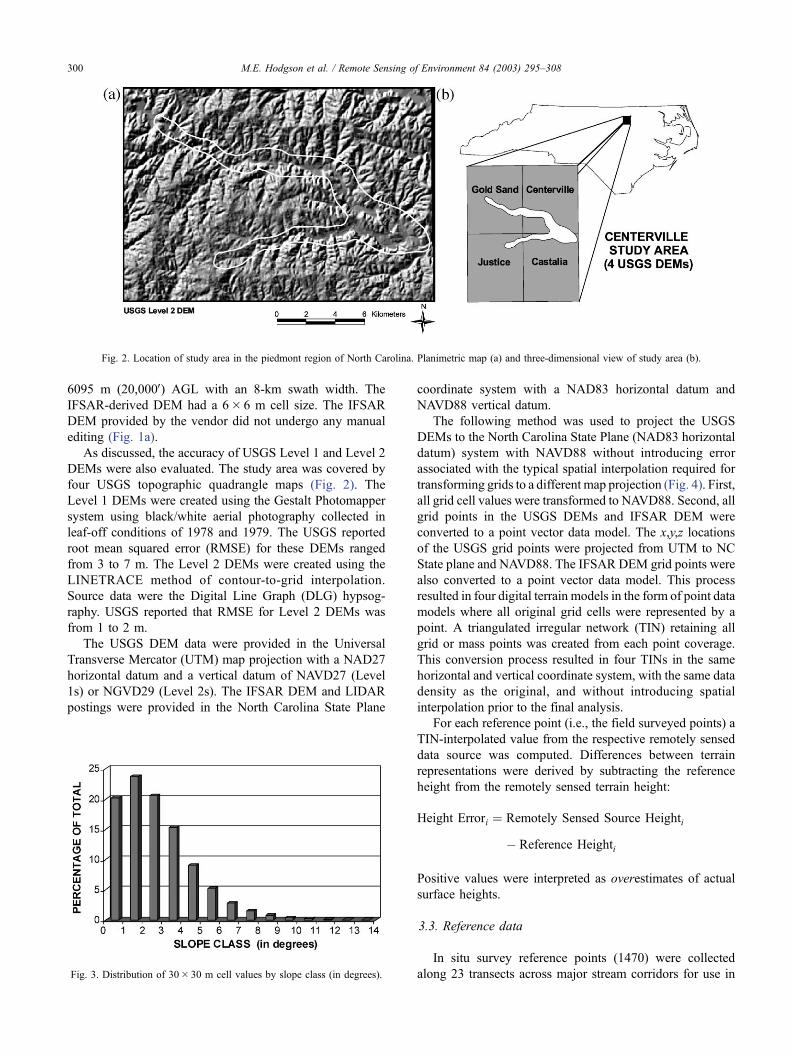
elevation model database. Two areas in the Piedmont and
coastal plain of North Carolina were studied. This paper
reports on the larger area consisting of the Swift and Red
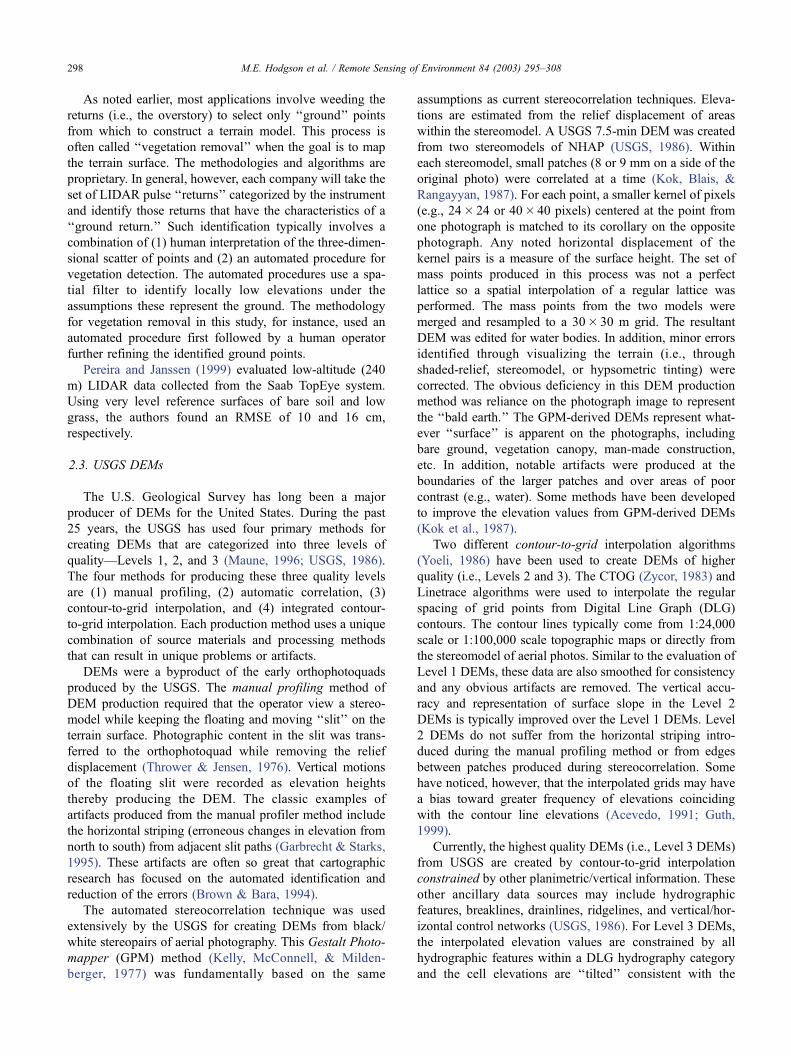
Bud Creek watersheds (Fig. 2). Topographic elevation in
this area ranged from 44 to 136 m with slopes from 0j to
14j (Fig. 3). No complete land cover map exists for the
study area. The area is covered with approximately 60%
deciduous and pine forest. Scattered tracts of forest have
been clearcut. A few tracts of land are cultivated with
soybean, cotton, corn, and tobacco.
3.2. Data sources
Airborne LIDAR data of the study area were collected by
Earthdata International. The laser used had a 0.33-mr
divergence rate. The data were collected at an above ground
elevation of 2400 m (8100 ft) with a 1.8-km swath width.
Footprint size of the laser beam at nadir was 79 cm. The
2400-m AGL resulted in a nominal spacing of 3.4 m
between LIDAR points. The average data density of the
entire dataset was approximately 1 pulse per 11.58 m2, or a
density comparable to a regular lattice with a cell size of
3.4� 3.4 m.
The LIDAR data were collected on June 9, 2000 in North
Carolina at the height of the growing season. The leaf-on
condition resulted in low LIDAR energy penetration in
some areas and no canopy penetration in others. Earthdata
post-processed the LIDAR returns to select last returns that
were estimated ground returns. The LIDAR postings
received represented a ‘‘bald-earth’’ dataset.
Interferometric synthetic aperture radar data were col-
lected June 22-25 of 2000 using the Intermap Star-3i
IFSAR. The Star-3i is an X-band radar (2.4–3.8 cm wave-
length). This IFSAR system was flown at approximately
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308 299
6095 m (20,000V) AGL with an 8-km swath width. The
IFSAR-derived DEM had a 6� 6 m cell size. The IFSAR
DEM provided by the vendor did not undergo any manual
editing (Fig. 1a).
As discussed, the accuracy of USGS Level 1 and Level 2
DEMs were also evaluated. The study area was covered by
four USGS topographic quadrangle maps (Fig. 2). The
Level 1 DEMs were created using the Gestalt Photomapper
system using black/white aerial photography collected in
leaf-off conditions of 1978 and 1979. The USGS reported
root mean squared error (RMSE) for these DEMs ranged
from 3 to 7 m. The Level 2 DEMs were created using the
LINETRACE method of contour-to-grid interpolation.
Source data were the Digital Line Graph (DLG) hypsog-
raphy. USGS reported that RMSE for Level 2 DEMs was
from 1 to 2 m.
The USGS DEM data were provided in the Universal
Transverse Mercator (UTM) map projection with a NAD27
horizontal datum and a vertical datum of NAVD27 (Level
1s) or NGVD29 (Level 2s). The IFSAR DEM and LIDAR
postings were provided in the North Carolina State Plane
coordinate system with a NAD83 horizontal datum and
NAVD88 vertical datum.
The following method was used to project the USGS
DEMs to the North Carolina State Plane (NAD83 horizontal
datum) system with NAVD88 without introducing error
associated with the typical spatial interpolation required for
transforming grids to a different map projection (Fig. 4). First,
all grid cell values were transformed to NAVD88. Second, all
grid points in the USGS DEMs and IFSAR DEM were
converted to a point vector data model. The x,y,z locations
of the USGS grid points were projected from UTM to NC
State plane and NAVD88. The IFSAR DEM grid points were
also converted to a point vector data model. This process
resulted in four digital terrain models in the form of point data
models where all original grid cells were represented by a
point. A triangulated irregular network (TIN) retaining all
grid or mass points was created from each point coverage.
This conversion process resulted in four TINs in the same
horizontal and vertical coordinate system, with the same data
density as the original, and without introducing spatial
interpolation prior to the final analysis.
For each reference point (i.e., the field surveyed points) a
TIN-interpolated value from the respective remotely sensed
data source was computed. Differences between terrain
representations were derived by subtracting the reference
height from the remotely sensed terrain height:
Height Errori ¼ Remotely Sensed Source Heighti
� Reference Heighti
Positive values were interpreted as overestimates of actual
surface heights.
3.3. Reference data
In situ survey reference points (1470) were collected
along 23 transects across major stream corridors for use inFig. 3. Distribution of 30� 30 m cell values by slope class (in degrees).
Fig. 2. Location of study area in the piedmont region of North Carolina. Planimetric map (a) and three-dimensional view of study area (b).
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308300
the accuracy assessment. A combination of RTK GPS for
endpoints and conventional surveying techniques were used
by the North Carolina Geodetic Survey (NCGS). Each
transect was essentially perpendicular to the stream gradient,
beginning on one side of the stream, crossing, and continu-
ing up the opposite bank. Transects ranged in length from
100 to 840 m. The mean distance between reference points
along a transect was 6.88 m. Approximately 89% of the
transects were concentrated in the Centerville and Castalia
portions of the study area. Field teams visited the study area
and characterized the land cover at 1195 of the survey point
locations. The stream corridors were largely covered by
forests, thus, the largest percentage of reference points was
under canopy. The frequency distribution for each land
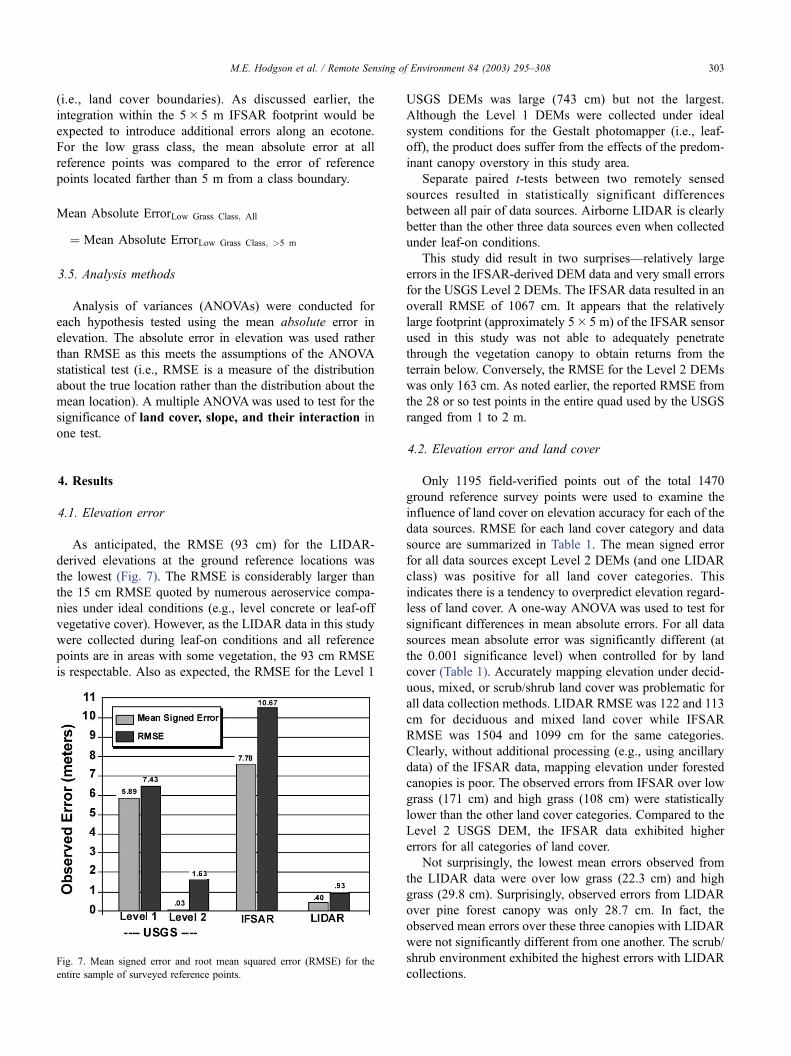
cover category is summarized in Fig. 5.
Errors in modeled surface slope from each data source
were also computed. To evaluate the relationship between
elevation errors and slope, both values must represent the
same location. The slope at each reference surveyed point
was derived from the slope along the transect. Because of
the limitation of transect data, it was not possible to compute
2{1\left/2}-dimensional slope/aspect measurements and
compare reference surface orientations with the remote
sensing derived terrain orientation (Hodgson, 1998).
Instead, the slope of each transect segment was computed
from the two adjoining reference points. Slope values along
transect segments were measured as F slope in degrees
from direction of movement along the transect (Fig. 6). The
Fig. 5. Frequency of 1195 survey points by land cover category. Fig. 6. Computation of slope at a surveyed reference point.
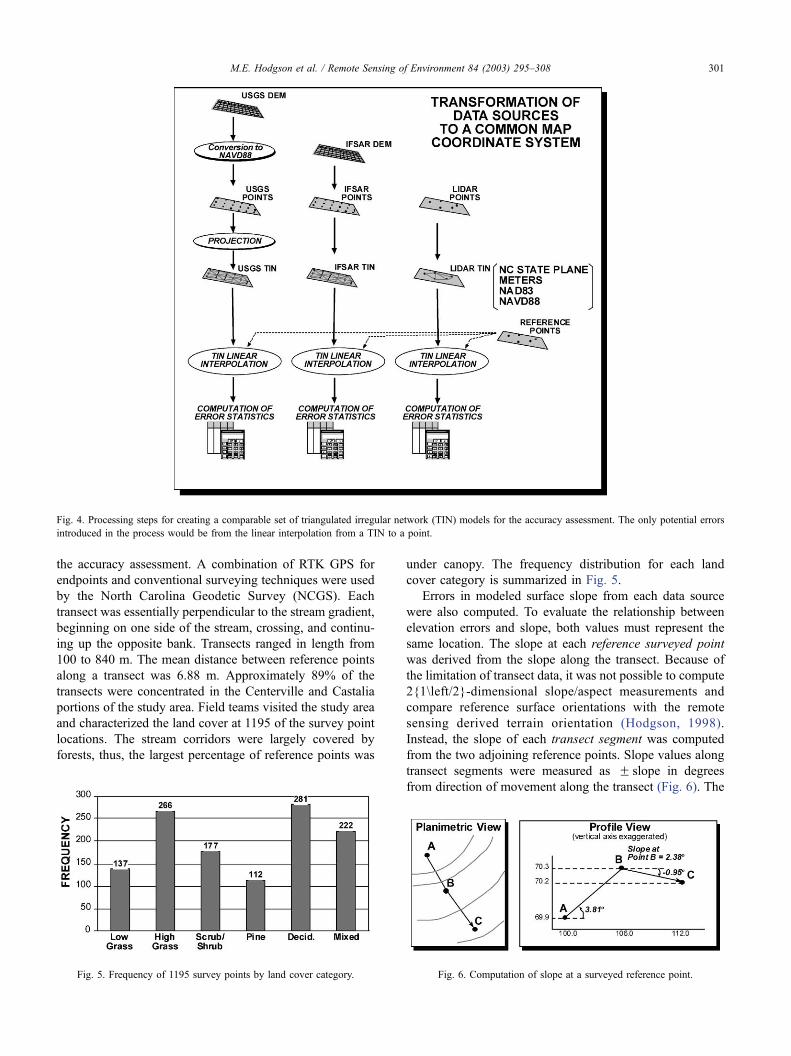
Fig. 4. Processing steps for creating a comparable set of triangulated irregular network (TIN) models for the accuracy assessment. The only potential errors
introduced in the process would be from the linear interpolation from a TIN to a point.
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308 301

slope at each reference surveyed point was then estimated
from the average absolute value of the two 1 1/2-dimen-
sional slopes of adjacent segments. These 1 1/2-dimensional
slope values for transect segments and reference surveyed
points were estimated from the interpolated elevations from
each data source—LIDAR, USGS DEMs, and IFSAR
DEM. Errors in slope were computed as:
Slope Errori ¼ Remotely Sensed Sourcei Slope
� Reference Slopei
Errors in slope along a reference transect to a remote
sensing-based source could theoretically range from
� 180j to 180j. Errors in slope at reference surveyed points
could range from � 0j to 90j.
3.4. Hypotheses
The fundamental statistics initially documented in this
study were the mean error, mean absolute error, and RMSE
of observed elevations from each of the four remote sensing
data sources—LIDAR, IFSAR, photogrammetric autocorre-
lation (USGS Level 1 DEMs), and contour-to-grid interpo-
lations of hypsography (USGS Level 2 DEMs). The
statistical significance between each data source was eval-
uated for the following null hypothesis (using mean absolute
error):
Mean ErrorLIDAR ¼ Mean ErrorIFSAR
¼ Mean ErrorUSGS Level 1
¼ Mean ErrorUSGS Level 2
Some studies have suggested the accuracy of DEMs may
vary depending on land cover. This suggestion is based on
the assumption that any land-cover type that has a sub-
stantial canopy will inhibit a visual modification of the
DEM or an automatic terrain extraction algorithm. It is not
known what the accuracies are for DEMs derived over
certain land cover classes or whether the errors are signifi-
cantly different between land cover categories. The null
hypothesis examined for each data source independently
was (using mean absolute error):
Mean ErrorLow Grass ¼ Mean ErrorHigh Grass
¼ . . . ¼ Mean ErrorMixed Forest
Following earlier studies, it was expected that a signifi-
cant relationship would exist between the accuracy of an
interpolated surface and the density of mass points. The
IFSAR and USGS DEMs were already in grid form and this
hypothesis could not be explored. The LIDAR data existed
as mass points. With LIDAR data, it was expected that this
relationship would also be true. Rather than test for the
significance of data density per se, we used the proximity to
the nearest LIDAR mass point as the independent variable.
However, it is incorrect to assume that all interpolated points
located far from a LIDAR mass point will in fact have
greater error. It may be assumed, however, that as a set,
points located farther away from LIDAR mass points will
have a larger mean absolute error. The null hypothesis
examined for LIDAR elevation data along each transect
was (using mean absolute error):
Mean ErrorDistance Class 1 ¼ Mean ErrorDistance Class 1 ¼ . . .
The classical consideration of elevation error assumes
that the error is a function of not only the instrument error in
the vertical domain but also the horizontal error of the point.
If the terrain surface is not level, then any horizontal errors
in position will typically result in vertical errors. A hori-
zontal error on a flat slope will have no affect of modeled
elevations while such an error on a sloping surface will
result in elevation errors. The Koppe formula (Maling,
1989) has been used to determine an allowable height error
given a known horizontal error. It is not possible to recover
the horizontal error of each mass point created by the
LIDAR or IFSAR instrument, or the horizontal errors in
the USGS Level 1 or Level 2 DEMs. However, tests for a
significant relationship between elevation error and terrain
slope can be performed using the mean error for slope
classes. For elevation data collected by any remote sensing
instrument, the null hypothesis would be (using mean
absolute error):
Mean ErrorSlope Class 1 ¼ Mean ErrorSlope Class 2 ¼ . . .
Finally, the resulting estimations of surface form (e.g.,
slope and aspect angles or the bi-directional surface angle)
may also vary with terrain slope. Using a similar difference
of means test as above, the mean slope errors between slope
classes were compared:
Mean Slope ErrorSlope Class 1
¼ Mean Slope ErrorSlope Class 2 ¼ . . .
In addition to the interaction between horizontal error,
slope, and resulting vertical error, the spatial resolution of
the data source may also influence vertical error in more
complex terrain. The spatial resolution of the reference
points, on average, is approximately 6.8 m. The spatial
resolution of the USGS DEMs is 30 m. Thus, any terrain
variation between grid cell centroids in the USGS DEMs is
assumed to be a constant linear trend. The spatial resolution
of the reference points will identify more complex natural
variations that cannot be represented by the coarse resolu-
tions of the USGS DEMs.
The last analysis focused on the effects of the different
‘‘footprints’’ of the LIDAR and IFSAR data and ecotones
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308302
(i.e., land cover boundaries). As discussed earlier, the
integration within the 5� 5 m IFSAR footprint would be
expected to introduce additional errors along an ecotone.
For the low grass class, the mean absolute error at all
reference points was compared to the error of reference
points located farther than 5 m from a class boundary.
Mean Absolute ErrorLow Grass Class; All
¼ Mean Absolute ErrorLow Grass Class; >5 m
3.5. Analysis methods
Analysis of variances (ANOVAs) were conducted for
each hypothesis tested using the mean absolute error in
elevation. The absolute error in elevation was used rather
than RMSE as this meets the assumptions of the ANOVA
statistical test (i.e., RMSE is a measure of the distribution
about the true location rather than the distribution about the
mean location). A multiple ANOVAwas used to test for the
significance of land cover, slope, and their interaction in
one test.
4. Results
4.1. Elevation error
As anticipated, the RMSE (93 cm) for the LIDAR-
derived elevations at the ground reference locations was
the lowest (Fig. 7). The RMSE is considerably larger than
the 15 cm RMSE quoted by numerous aeroservice compa-
nies under ideal conditions (e.g., level concrete or leaf-off
vegetative cover). However, as the LIDAR data in this study
were collected during leaf-on conditions and all reference
points are in areas with some vegetation, the 93 cm RMSE
is respectable. Also as expected, the RMSE for the Level 1
USGS DEMs was large (743 cm) but not the largest.
Although the Level 1 DEMs were collected under ideal
system conditions for the Gestalt photomapper (i.e., leaf-
off), the product does suffer from the effects of the predom-
inant canopy overstory in this study area.
Separate paired t-tests between two remotely sensed
sources resulted in statistically significant differences
between all pair of data sources. Airborne LIDAR is clearly
better than the other three data sources even when collected
under leaf-on conditions.
This study did result in two surprises—relatively large
errors in the IFSAR-derived DEM data and very small errors
for the USGS Level 2 DEMs. The IFSAR data resulted in an
overall RMSE of 1067 cm. It appears that the relatively
large footprint (approximately 5� 5 m) of the IFSAR sensor
used in this study was not able to adequately penetrate
through the vegetation canopy to obtain returns from the
terrain below. Conversely, the RMSE for the Level 2 DEMs
was only 163 cm. As noted earlier, the reported RMSE from
the 28 or so test points in the entire quad used by the USGS
ranged from 1 to 2 m.
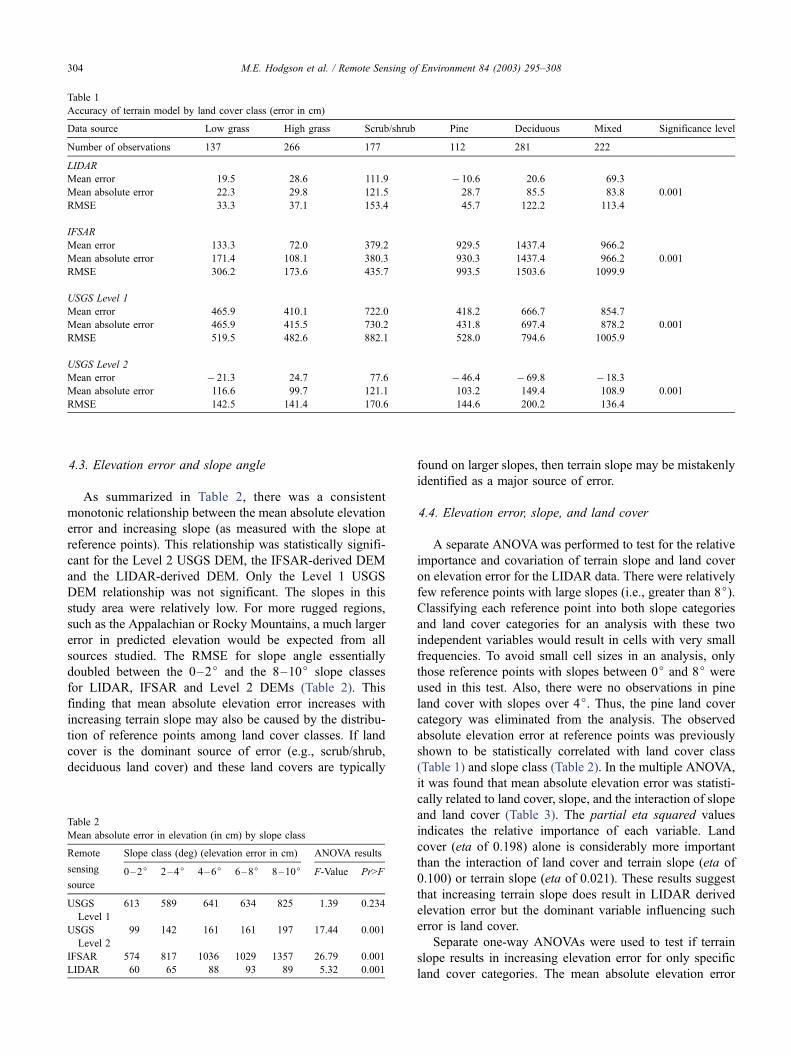
4.2. Elevation error and land cover
Only 1195 field-verified points out of the total 1470
ground reference survey points were used to examine the
influence of land cover on elevation accuracy for each of the
data sources. RMSE for each land cover category and data
source are summarized in Table 1. The mean signed error
for all data sources except Level 2 DEMs (and one LIDAR
class) was positive for all land cover categories. This
indicates there is a tendency to overpredict elevation regard-
less of land cover. A one-way ANOVA was used to test for
significant differences in mean absolute errors. For all data
sources mean absolute error was significantly different (at
the 0.001 significance level) when controlled for by land
cover (Table 1). Accurately mapping elevation under decid-
uous, mixed, or scrub/shrub land cover was problematic for
all data collection methods. LIDAR RMSE was 122 and 113
cm for deciduous and mixed land cover while IFSAR
RMSE was 1504 and 1099 cm for the same categories.
Clearly, without additional processing (e.g., using ancillary
data) of the IFSAR data, mapping elevation under forested
canopies is poor. The observed errors from IFSAR over low
grass (171 cm) and high grass (108 cm) were statistically
lower than the other land cover categories. Compared to the
Level 2 USGS DEM, the IFSAR data exhibited higher
errors for all categories of land cover.
Not surprisingly, the lowest mean errors observed from
the LIDAR data were over low grass (22.3 cm) and high
grass (29.8 cm). Surprisingly, observed errors from LIDAR
over pine forest canopy was only 28.7 cm. In fact, the
observed mean errors over these three canopies with LIDAR
were not significantly different from one another. The scrub/
shrub environment exhibited the highest errors with LIDAR
collections.Fig. 7. Mean signed error and root mean squared error (RMSE) for the
entire sample of surveyed reference points.
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308 303
4.3. Elevation error and slope angle
As summarized in Table 2, there was a consistent
monotonic relationship between the mean absolute elevation
error and increasing slope (as measured with the slope at
reference points). This relationship was statistically signifi-
cant for the Level 2 USGS DEM, the IFSAR-derived DEM
and the LIDAR-derived DEM. Only the Level 1 USGS
DEM relationship was not significant. The slopes in this
study area were relatively low. For more rugged regions,
such as the Appalachian or Rocky Mountains, a much larger
error in predicted elevation would be expected from all
sources studied. The RMSE for slope angle essentially
doubled between the 0–2j and the 8–10j slope classes
for LIDAR, IFSAR and Level 2 DEMs (Table 2). This
finding that mean absolute elevation error increases with
increasing terrain slope may also be caused by the distribu-
tion of reference points among land cover classes. If land
cover is the dominant source of error (e.g., scrub/shrub,
deciduous land cover) and these land covers are typically
found on larger slopes, then terrain slope may be mistakenly
identified as a major source of error.
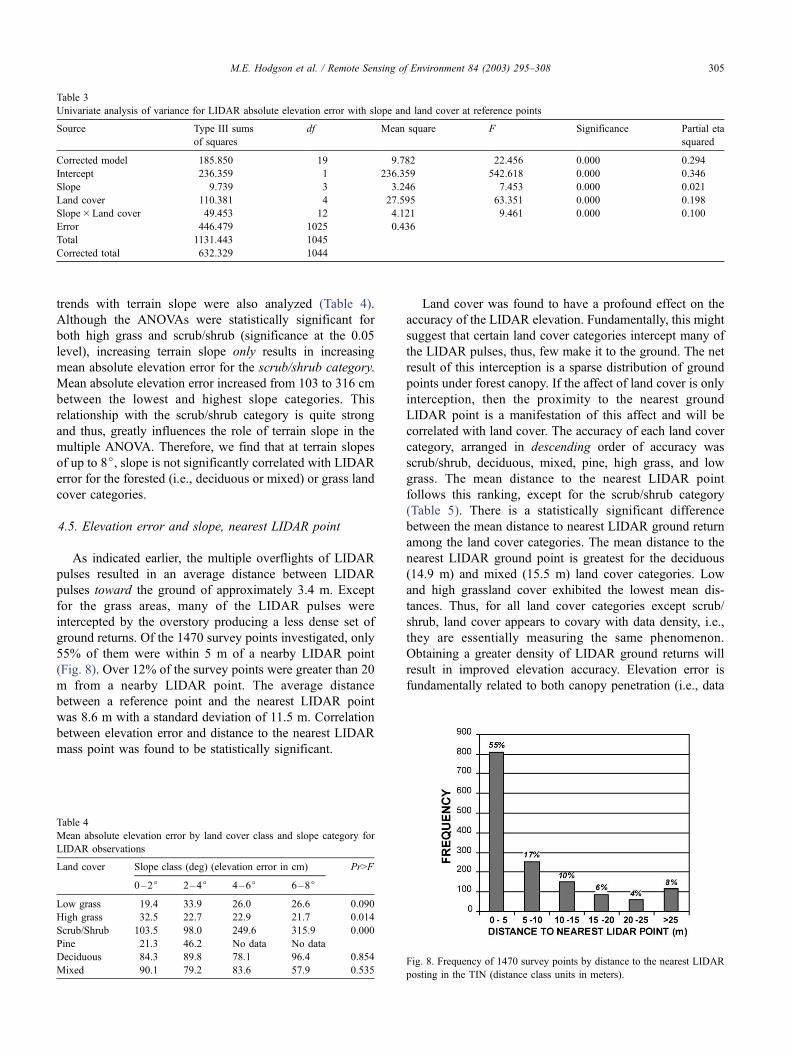
4.4. Elevation error, slope, and land cover
A separate ANOVAwas performed to test for the relative
importance and covariation of terrain slope and land cover
on elevation error for the LIDAR data. There were relatively
few reference points with large slopes (i.e., greater than 8j).Classifying each reference point into both slope categories
and land cover categories for an analysis with these two
independent variables would result in cells with very small
frequencies. To avoid small cell sizes in an analysis, only
those reference points with slopes between 0j and 8j were
used in this test. Also, there were no observations in pine
land cover with slopes over 4j. Thus, the pine land cover
category was eliminated from the analysis. The observed
absolute elevation error at reference points was previously
shown to be statistically correlated with land cover class
(Table 1) and slope class (Table 2). In the multiple ANOVA,
it was found that mean absolute elevation error was statisti-
cally related to land cover, slope, and the interaction of slope
and land cover (Table 3). The partial eta squared values
indicates the relative importance of each variable. Land
cover (eta of 0.198) alone is considerably more important
than the interaction of land cover and terrain slope (eta of
0.100) or terrain slope (eta of 0.021). These results suggest
that increasing terrain slope does result in LIDAR derived
elevation error but the dominant variable influencing such
error is land cover.
Separate one-way ANOVAs were used to test if terrain
slope results in increasing elevation error for only specific
land cover categories. The mean absolute elevation error
Table 2
Mean absolute error in elevation (in cm) by slope class
Remote Slope class (deg) (elevation error in cm) ANOVA results
sensing
source
0–2j 2–4j 4–6j 6–8j 8–10j F-Value Pr>F
USGS
Level 1
613 589 641 634 825 1.39 0.234
USGS
Level 2
99 142 161 161 197 17.44 0.001
IFSAR 574 817 1036 1029 1357 26.79 0.001
LIDAR 60 65 88 93 89 5.32 0.001
Table 1
Accuracy of terrain model by land cover class (error in cm)
Data source Low grass High grass Scrub/shrub Pine Deciduous Mixed Significance level
Number of observations 137 266 177 112 281 222
LIDAR
Mean error 19.5 28.6 111.9 � 10.6 20.6 69.3
Mean absolute error 22.3 29.8 121.5 28.7 85.5 83.8 0.001
RMSE 33.3 37.1 153.4 45.7 122.2 113.4
IFSAR
Mean error 133.3 72.0 379.2 929.5 1437.4 966.2
Mean absolute error 171.4 108.1 380.3 930.3 1437.4 966.2 0.001
RMSE 306.2 173.6 435.7 993.5 1503.6 1099.9
USGS Level 1
Mean error 465.9 410.1 722.0 418.2 666.7 854.7
Mean absolute error 465.9 415.5 730.2 431.8 697.4 878.2 0.001
RMSE 519.5 482.6 882.1 528.0 794.6 1005.9
USGS Level 2
Mean error � 21.3 24.7 77.6 � 46.4 � 69.8 � 18.3
Mean absolute error 116.6 99.7 121.1 103.2 149.4 108.9 0.001
RMSE 142.5 141.4 170.6 144.6 200.2 136.4
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308304
trends with terrain slope were also analyzed (Table 4).
Although the ANOVAs were statistically significant for
both high grass and scrub/shrub (significance at the 0.05
level), increasing terrain slope only results in increasing
mean absolute elevation error for the scrub/shrub category.
Mean absolute elevation error increased from 103 to 316 cm
between the lowest and highest slope categories. This
relationship with the scrub/shrub category is quite strong
and thus, greatly influences the role of terrain slope in the
multiple ANOVA. Therefore, we find that at terrain slopes
of up to 8j, slope is not significantly correlated with LIDAR
error for the forested (i.e., deciduous or mixed) or grass land
cover categories.
4.5. Elevation error and slope, nearest LIDAR point
As indicated earlier, the multiple overflights of LIDAR
pulses resulted in an average distance between LIDAR
pulses toward the ground of approximately 3.4 m. Except
for the grass areas, many of the LIDAR pulses were
intercepted by the overstory producing a less dense set of
ground returns. Of the 1470 survey points investigated, only
55% of them were within 5 m of a nearby LIDAR point
(Fig. 8). Over 12% of the survey points were greater than 20
m from a nearby LIDAR point. The average distance
between a reference point and the nearest LIDAR point
was 8.6 m with a standard deviation of 11.5 m. Correlation
between elevation error and distance to the nearest LIDAR
mass point was found to be statistically significant.
Land cover was found to have a profound effect on the
accuracy of the LIDAR elevation. Fundamentally, this might
suggest that certain land cover categories intercept many of
the LIDAR pulses, thus, few make it to the ground. The net
result of this interception is a sparse distribution of ground
points under forest canopy. If the affect of land cover is only
interception, then the proximity to the nearest ground
LIDAR point is a manifestation of this affect and will be
correlated with land cover. The accuracy of each land cover
category, arranged in descending order of accuracy was
scrub/shrub, deciduous, mixed, pine, high grass, and low
grass. The mean distance to the nearest LIDAR point
follows this ranking, except for the scrub/shrub category
(Table 5). There is a statistically significant difference
between the mean distance to nearest LIDAR ground return
among the land cover categories. The mean distance to the
nearest LIDAR ground point is greatest for the deciduous
(14.9 m) and mixed (15.5 m) land cover categories. Low
and high grassland cover exhibited the lowest mean dis-
tances. Thus, for all land cover categories except scrub/
shrub, land cover appears to covary with data density, i.e.,
they are essentially measuring the same phenomenon.
Obtaining a greater density of LIDAR ground returns will
result in improved elevation accuracy. Elevation error is
fundamentally related to both canopy penetration (i.e., data
Table 4
Mean absolute elevation error by land cover class and slope category for
LIDAR observations
Land cover Slope class (deg) (elevation error in cm) Pr>F
0–2j 2–4j 4–6j 6–8j
Low grass 19.4 33.9 26.0 26.6 0.090
High grass 32.5 22.7 22.9 21.7 0.014
Scrub/Shrub 103.5 98.0 249.6 315.9 0.000
Pine 21.3 46.2 No data No data
Deciduous 84.3 89.8 78.1 96.4 0.854
Mixed 90.1 79.2 83.6 57.9 0.535
Table 3
Univariate analysis of variance for LIDAR absolute elevation error with slope and land cover at reference points
Source Type III sums
of squares
df Mean square F Significance Partial eta
squared
Corrected model 185.850 19 9.782 22.456 0.000 0.294
Intercept 236.359 1 236.359 542.618 0.000 0.346
Slope 9.739 3 3.246 7.453 0.000 0.021
Land cover 110.381 4 27.595 63.351 0.000 0.198
Slope�Land cover 49.453 12 4.121 9.461 0.000 0.100
Error 446.479 1025 0.436
Total 1131.443 1045
Corrected total 632.329 1044
Fig. 8. Frequency of 1470 survey points by distance to the nearest LIDAR
posting in the TIN (distance class units in meters).
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308 305

density) and slope (i.e., horizontal error) for the scrub/shrub
category. There is an interaction effect between data density
and terrain slope for all categories.
Why was the mean elevation error for scrub/shrub so
high compared to deciduous or mixed land cover? The
scrub/shrub environment was composed of a very hetero-
geneous mixture of multi-story vegetation canopies. This
composition likely makes it difficult for an automated
weeding algorithm to reliably identify ground returns from
other canopy returns. Additionally, the LIDAR pulse length
likely compounds the problem of separating unique returns.
Sloping terrain would make the ground return identification
problem even more difficult. The LIDAR footprint size,
pulse length, and terrain slope all contribute to a very
difficult problem of identifying ground returns in a multi-
story vegetative environment. This problem is exhibited by
noting the mean signed error for the scrub/shrub category
(Table 1) was 112 cm, much higher than the other land
cover categories. Clearly, a large percentage of the labeled
‘‘ground’’ returns were apparently canopy returns.
4.6. Slope error and slope
For analyzing the relationship between modeled slope
error and the actual reference slope, the slope of individual
survey transect segments in 1 1/2-dimensional form was
used rather than the average slope at a point (Fig. 6). The
1 1/2-D form considers whether the slope is rising or falling
in the direction of the transect—a measure of ‘‘aspect’’ in
1 1/2-D. Reference slopes along transects ranged from 0jto 21.48j. Most of the slopes, however, were very low with
an overall mean of 2.59j. Mean absolute errors in slope for
each data source are shown in Table 6. The terrain slope
derived from the LIDAR data and from Level 2 DEMs
exhibited the lowest mean errors from 1.15–4.79j. As partof the production process, Level 2 DEMs are checked for
consistency in slope (using shaded relief, 3-D carto-
graphics) and often smoothed. Thus, any unnatural high
frequency variability would have been eliminated thereby
producing a DEM more consistent with the very gentle
slopes of the study area terrain. Mean absolute slope error
for the USGS Level 1 data was somewhat higher ranging
from 2.23j to 7.34j. Terrain slope error derived from the
IFSAR data was quite large (i.e., from 5.78j to 10.21j)with several observations exhibiting very large errors (up to
61.55j). These large errors in slope for the IFSAR DEM
typically occurred near ecotones, such as survey points near
a forest–grass interface. Bolstad and Stowe (1994) and
Chang and Tsai (1991) previously noted that modeled slope
error in DEMs increased with increasing slope in the actual
surface. These findings are consistent with this previous
work. For all data sources, the error in modeled slope
increased with increasing reference slopes. Errors in mod-
eled slope were statistically different among reference slope
categories.
A comparison of the mean slope errors and centroid of
the slope class for the USGS Level 2 DEM (e.g., 4.72jobserved for the 8–10j slope class) suggests the error is
approximately 50% for these larger slopes. For lower slopes,
the percentage error is greater (e.g., 64% for the 2–4j slope
class). Similar percentage errors were observed for the
LIDAR DEM. The USGS Level 1 and IFSAR DEMs
exhibited much larger percentage errors (e.g., up to 100%).
4.7. Footprint size of collection instruments
For the IFSAR and LIDAR data, the mean absolute error
of all reference points within the low grass class was found
to be 171.4 and 22.3 cm, respectively. When the reference
points near an ecotone (i.e., within 5 m of the boundary)
were eliminated, the mean error for the IFSAR was only
53.2 cm, a 69% drop in error. This difference was statisti-
cally significant at the 0.05 level. The mean error for points
farther than 5 m from an ecotone in the LIDAR data was
19.5 cm (a 12% drop) and was also significantly different
than the 22.3 cm for all points in the low grass class. These
results indicate that vegetative land cover near an ecotone
influences the IFSAR data more than the LIDAR data.
Table 5
Mean distance to nearest LIDAR point by land cover class
Characterization Low grass High grass Scrub/shrub Pine Deciduous Mixed Pr>F
Mean distance (m) 1.6 1.8 9.9 6.3 14.9 15.3 0.000
Table 6
Mean absolute error in 1 1/2-dimensional slope by reference slope (mean error in degrees)
Remote sensing Reference slope (deg.) class for segments in 1 1/2 dimensions Pr>F
source 0–2j 2–4j 4–6j 6–8j 8–10j
USGS Level 1 2.23 2.87 3.34 3.92 7.34 0.000
USGS Level 2 1.15 2.00 2.56 2.70 4.72 0.000
IFSAR 5.78 6.80 7.86 6.01 10.21 0.006
LIDAR 1.75 1.95 2.52 2.52 4.79 0.000
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308306

5. Discussion
The distribution of reference points in this study was
very large compared to the checks by the U.S. Geological
Survey using National Map Accuracy Standards. A typical
check by USGS would use 20–30 points well distributed
around the map. Our reference data were concentrated in
riverine and adjacent areas and may not represent the wide
variety of land cover types. Given these differences, it
should be noted that the observed RMSE for the individual
Level 1 DEMS ranged from 4.8 to 10.0 m, while the USGS
reported RMSEs ranging from 3 to 7 m. The USGS reported
RMSE for the four Level 2 DEMs ranged from 1 to 2 m.
The observed Level 2 RMSE for our study varied between
0.78 and 1.90 m for the same four DEMs, consistent with
the USGS observations. While the USGS puts great empha-
sis on modeling surface form (i.e., terrain slope, aspect, and
drainage) in their Level 2 and 3 DEMs, there is no accuracy
standard or attempt to report the accuracy of such parame-
ters. For the Level 1 and 2 DEMs, the error in 1 1/2-
dimensional surface slope is roughly 50%. If this relation-
ship found in slopes ranging from 0j to 10j also holds for
higher slopes then expect to see an average 10j error for
20j slopes, for instance.
All data sources other than the Level 2 DEMs (and one
LIDAR class) overpredicted elevation, on average, regard-
less of land cover. Since the automated stereocorrelation
technique used for the GPM-derived Level 1 DEMs models
the canopy top, this average overprediction in elevations is
not surprising. The IFSAR-derived DEM also suffered from
the canopy problems.
The 113–122 cm RMSE of LIDAR derived elevation in
deciduous/mixed forested areas would be a lower confi-
dence bound for mapping vegetation height (relatively
homogenous canopies) from a single LIDAR overflight.
Estimates of canopy height in a scrub/shrub environment
would be less accurate. Determining vegetation height
requires differencing the estimated canopy elevation from
the estimated surface elevation (Means et al., 2000). The
data collected in leaf-on conditions may be ideal for
determining canopy elevation but not ground elevation.
Conversely, leaf-off conditions may not provide good esti-
mates of canopy height.
Most aeroservice companies advertise LIDAR accuracies
from 15 to 25 cm RMSE, depending on flying height. The
15 cm RMSE is an important threshold for FEMA in
evaluating data sources for mapping floodplains. The find-
ings from this study suggest this 15 cm threshold is not
obtainable with LIDAR during the growing season over any
surface with vegetative cover.
The reported elevation accuracy from the LIDAR or
IFSAR data is strongly related to land cover and to a
somewhat lesser degree is related to slope. Forested land
cover influences the LIDAR penetration rate and multi-story
vegetative cover (e.g., scrub/shrub) confuses the automated
weeding algorithms. Future LIDAR sensors with very high
pulse rates (e.g., 40,000–50,000 pulse/s) may overcome
much of the interception problem in forested areas. Using
lasers with narrower beam divergences and the resulting
smaller footprints would also help in penetrating breaks in
the canopy. Flying at lower altitudes would also reduce the
footprint size. However, more ‘‘intelligent’’ algorithms and
lasers with shorter pulse lengths are needed to map elevation
in multi-story environments, like scrub/shrub. Surprisingly,
pine forests did not dramatically impact LIDAR accuracy.
Not surprisingly, the IFSAR system did not perform well
over the forested surface. Manual editing of the surface (Fig.
1) would be required for this land cover when using IFSAR
data. The Level 2 DEMs from USGS exhibited RMSEs
from 1.4 to 2.0 m with little difference between land cover
categories.
The average slope by land cover class ranged from 1.6jto 3.3j. The Koppe formula demonstrates elevation error
will increase with increasing slope if the data contain any
horizontal errors. As the slopes in this study were relatively
low, the impact of terrain slope on elevation accuracy is
rather minimal. Greater elevation errors may be expected in
areas of more rugged terrain. For those environmental
studies (e.g., hydrologic, biogeographic) requiring either
accurate elevation or terrain slope, either LIDAR or the
USGS Level 2 DEMs are far superior to either the USGS
Level 1 or IFSAR-based DEMs. However, the approxi-
mately 50% errors in terrain slope at about 8–10j slope
should be noted when in applications that require highly
accurate terrain slope estimations for specific sites.
Finally, the integration within the large footprint of the
IFSAR data results in greater errors along ecotones where
the vegetation height of one class is quite different than the
vegetation of a neighboring class (e.g., low grass and
forest). A significant effect of the ecotone was also found
with the LIDAR data although the change in mean errors
was not nearly as pronounced as with the IFSAR data.
Acknowledgements
The authors express their appreciation to Gary Thompson
at the North Carolina Geodetic Survey for the collection of
reference points. Karen Shuckman at Earthdata International
provided the LIDAR data and assisted in the interpretation
of the findings. We also thank George Raber and Jason
Tullis for collection of the land cover information. Bryan
Mercer of Intermap provided useful comments and
interpretation of the IFSAR data and David Box provided
in depth information on LIDAR sensors.
References
Acevedo, W. (1991). First assessment of the U.S. Geological Survey 30-
minute DEM’s: a great improvement over existing 1-degree data. Pro-
ceedings of the Annual Meetings of the ACSM-ASPRS, 1–12.
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308 307

Bolstad, P. V., & Stowe, T. (1994). An evaluation of DEM accuracy:
elevation, slope, and aspect. Photogrammetric Engineering and Remote
Sensing, 60(11), 1327–1332.
Box, D. (2001). Personal communication.
Brown, D. G., & Bara, T. J. (1994). Recognition and reduction of system-
atic error in elevation and derivative surfaces from 7-1/2 minute DEMs.
Photogrammetric Engineering and Remote Sensing, 60(2), 189–194.
Carter, J. R. (1992). The effect of data precision on the calculation of slope
and aspect using gridded DEMs. Cartographica, 29(1), 22–34.
Chang, K., & Tsai, B. (1991). The effect of DEM resolution on slope and
aspect mapping. Cartography and Geographic Information Systems, 9
(4), 405–419.
Cowen, D. J., Jensen, J. R., Hendrix, C., Hodgson, M. E., & Schill, S. R.
(2000). A GIS-assisted rail construction econometric model that incor-
porates LIDAR data. Photogrammetric Engineering and Remote Sens-
ing, 66(11), 1323–1326.
Gao, J. (1995). Comparison of sampling schemes in constructing DTMs
from topographic maps. The ITC Journal, 1, 18–22.
Garbrecht, J., & Starks, P. (1995). Note on the use of USGS level 7.5-
minute DEM coverages for landscape drainage analyses. Photogram-
metric Engineering and Remote Sensing, 61(5), 519–522.
Gong, J., Li, Z., Zhu, Q., Sui, H., & Zhou, Y. (2000). Effects of various
factors on the accuracy of DEMs: an intensive experimental inves-
tigation. Photogrammetric Engineering and Remote Sensing, 66(9),
1113–1117.
Guth, P. L. (1999). Contour line ‘‘ghosts’’ in USGS level 2 DEMs. Photo-
grammetric Engineering and Remote Sensing., 65(3), 289–296.
Hodgson, M. E. (1998). Comparison of bi-directional angles from surface
slope/aspect algorithms. Cartography and Geographic Information Sys-
tems, 25(3), 173–187.
Jensen, J. R. (2000). Active and passive microwave, and LIDAR remote
sensing. Remote sensing of the environment: an earth resource perspec-
tive (pp. 285–332). NJ: Prentice-Hall, Chap. 9.
Jensen, J. R., Hodgson, M. E., Mackey, H. E., & Krabill, W. (1987).
Correlation between aircraft MSS and LIDAR remotely sensed data
on a forested wetland. Geocarto International, 2(4), 39–54.
JPL (1999). Shuttle radar topography mission. Pasadena: Jet Propulsion
Laboratory, http://www-radar.jpl.nasa.gov/srtm/tech_factsheet.html.
Kelly, R. E., McConnell, P. R. H., & Mildenberger, S. J. (1977). The
Gestalt photomapping system. Photogrammetric Engineering and Re-
mote Sensing, 43(11), 1407–1417.
Kenward, T., Lettenmaier, D. P., Wood, E. F., & Fielding, E. (2000). Effects
of digital elevation model accuracy on hydrologic predictions. Remote
Sensing of Environment, 74, 432–444.
Kok, A. L., Blais, J. A. R., & Rangayyan, R. M. (1987). Filtering of
digitally correlated Gestalt elevation data. Photogrammetric Engineer-
ing and Remote Sensing, 53(5), 535–538.
Lane, T. (2001). Personal communication.
MacEachren, A. M., & Davidson, J. V. (1987). Sampling and isometric
mapping of continuous geographic surfaces. The American Cartogra-
pher, 14(4), 229–320.
Maling, D. H. (1989). Measurements from maps. NY: Pergamon.
Maune, D. F. (1996). Introduction to digital elevation models (DEM).
Digital photogrammetry: an addendum to the manual of photogram-
metry. Bethesda, MD: American Society for Photogrammetry and
Remote Sensing (portion of Chap. 6).
Means, J. E., Acker, S. A., Fitt, B. J., Renslow, M., Emerson, L., &
Hendrix, C. J. (2000). Predicting forest stand characteristics with air-
borne scanning LIDAR. Photogrammetric Engineering and Remote
Sensing, 66(11), 1367–1371.
Mercer, B. (2001). Personal communication.
Pereira, L. M. G., & Janssen, L. L. F. (1999). Suitability of laser data for
DTM generation: a case study in the context of road planning and
design. Photogrammetry and Remote Sensing, 54, 244–253.
Plaut, J. J., Rivard, B., & D’lorio, M. A. (1999). Radar: sensors and case
studies. In A. N. Rencz (Ed.), Remote sensing for the earth sciences:
manual of remote sensing, vol. 3 (3rd ed.) (pp. 613–642). New York:
Wiley.
Thrower, N. J. W., & Jensen, J. R. (1976). The orthophoto and orthopho-
tomap: characteristics, development and application. The American
Cartographer, 3(1), 39–56.
United States Geological Survey (USGS) (1986). Standards for Digital
Elevation Models, Open File Report 86-004.
Yoeli, P. Y. (1986). Computer executed production of a regular grid of
height points from digital contours. The American Cartographer, 13,
219–229.
Zycor (1983). User’s manual for contour-to-grid interpolation. Reston,
VA: U.S. Geological Survey.
M.E. Hodgson et al. / Remote Sensing of Environment 84 (2003) 295–308308




















