
AN APPROACH TO MITIGATE IONOSPHERIC SCINTILLATION EFFECTS ON GNSS RELATIVE POSITIONING: CASE STUDY...
14
J Geod (2009) 83:953–966 DOI 10.1007/s00190-009-0313-6 ORIGINAL ARTICLE Improving the GNSS positioning stochastic model in the presence of ionospheric scintillation M. Aquino · J. F. G. Monico · A. H. Dodson · H. Marques · G. De Franceschi · L. Alfonsi · V. Romano · M. Andreotti Received: 2 October 2008 / Accepted: 9 March 2009 / Published online: 24 March 2009 © Springer-Verlag 2009 Abstract Ionospheric scintillations are caused by time- varying electron density irregularities in the ionosphere, occurring more often at equatorial and high latitudes. This paper focuses exclusively on experiments undertaken in Europe, at geographic latitudes between ∼50 ◦ N and ∼80 ◦ N, where a network of GPS receivers capable of monitoring Total Electron Content and ionospheric scintillation param- eters was deployed. The widely used ionospheric scintil- lation indices S4 and σ ϕ represent a practical measure of the intensity of amplitude and phase scintillation affecting GNSS receivers. However, they do not provide sufficient information regarding the actual tracking errors that degrade GNSS receiver performance. Suitable receiver tracking mod- els, sensitive to ionospheric scintillation, allow the compu- tation of the variance of the output error of the receiver PLL (Phase Locked Loop) and DLL (Delay Locked Loop), which expresses the quality of the range measurements used by the receiver to calculate user position. The ability of such models of incorporating phase and amplitude scintillation effects into the variance of these tracking errors underpins our proposed method of applying relative weights to measurements from different satellites. That gives the least squares stochastic M. Aquino (B ) · A. H. Dodson Institute of Engineering Surveying and Space Geodesy (IESSG), University of Nottingham, Nottingham, UK e-mail: [email protected] J. F. G. Monico · H. Marques Department of Cartography, Sao Paulo State University, Pres. Prudente, São Paulo, SP, Brazil G. De Franceschi · L. Alfonsi · V. Romano Instituto Nazionale di Geofisica e Vulcanologia (INGV), Rome, Italy M. Andreotti Geospatial Research Center Ltd., Christchurch, New Zealand model used for position computation a more realistic rep- resentation, vis-a-vis the otherwise ‘equal weights’ model. For pseudorange processing, relative weights were com- puted, so that a ‘scintillation-mitigated’ solution could be performed and compared to the (non-mitigated) ‘equal weights’ solution. An improvement between 17 and 38% in height accuracy was achieved when an epoch by epoch dif- ferential solution was computed over baselines ranging from 1 to 750 km. The method was then compared with alterna- tive approaches that can be used to improve the least squares stochastic model such as weighting according to satellite ele- vation angle and by the inverse of the square of the standard deviation of the code/carrier divergence (sigma CCDiv). The influence of multipath effects on the proposed mitigation approach is also discussed. With the use of high rate scin- tillation data in addition to the scintillation indices a carrier phase based mitigated solution was also implemented and compared with the conventional solution. During a period of occurrence of high phase scintillation it was observed that problems related to ambiguity resolution can be reduced by the use of the proposed mitigated solution. Keywords Global navigation satellites system · Global positioning system · Ionospheric scintillation · Receiver tracking models · Mitigation · Stochastic model 1 Introduction At high latitudes, the effects of ionospheric scintillations on GNSS are exacerbated during solar maximum, when geo- magnetic storms may occur in connection with enhanced solar activity. The polar ionosphere may become highly tur- bulent leading to scintillation scenarios, as for instance in the northern hemisphere during the severe storms of October and November 2003 (e.g De Franceschi et al. 2008). The adverse 123
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of AN APPROACH TO MITIGATE IONOSPHERIC SCINTILLATION EFFECTS ON GNSS RELATIVE POSITIONING: CASE STUDY...
J Geod (2009) 83:953–966DOI 10.1007/s00190-009-0313-6
ORIGINAL ARTICLE
Improving the GNSS positioning stochastic model in the presenceof ionospheric scintillation
M. Aquino · J. F. G. Monico · A. H. Dodson ·H. Marques · G. De Franceschi · L. Alfonsi ·V. Romano · M. Andreotti
Received: 2 October 2008 / Accepted: 9 March 2009 / Published online: 24 March 2009© Springer-Verlag 2009
Abstract Ionospheric scintillations are caused by time-varying electron density irregularities in the ionosphere,occurring more often at equatorial and high latitudes. Thispaper focuses exclusively on experiments undertaken inEurope, at geographic latitudes between ∼50◦N and ∼80◦N,where a network of GPS receivers capable of monitoringTotal Electron Content and ionospheric scintillation param-eters was deployed. The widely used ionospheric scintil-lation indices S4 and σϕ represent a practical measure ofthe intensity of amplitude and phase scintillation affectingGNSS receivers. However, they do not provide sufficientinformation regarding the actual tracking errors that degradeGNSS receiver performance. Suitable receiver tracking mod-els, sensitive to ionospheric scintillation, allow the compu-tation of the variance of the output error of the receiver PLL(Phase Locked Loop) and DLL (Delay Locked Loop), whichexpresses the quality of the range measurements used by thereceiver to calculate user position. The ability of such modelsof incorporating phase and amplitude scintillation effects intothe variance of these tracking errors underpins our proposedmethod of applying relative weights to measurements fromdifferent satellites. That gives the least squares stochastic
M. Aquino (B) · A. H. DodsonInstitute of Engineering Surveying and Space Geodesy (IESSG),University of Nottingham, Nottingham, UKe-mail: [email protected]
J. F. G. Monico · H. MarquesDepartment of Cartography, Sao Paulo State University,Pres. Prudente, São Paulo, SP, Brazil
G. De Franceschi · L. Alfonsi · V. RomanoInstituto Nazionale di Geofisica e Vulcanologia (INGV),Rome, Italy
M. AndreottiGeospatial Research Center Ltd., Christchurch, New Zealand
model used for position computation a more realistic rep-resentation, vis-a-vis the otherwise ‘equal weights’ model.For pseudorange processing, relative weights were com-puted, so that a ‘scintillation-mitigated’ solution could beperformed and compared to the (non-mitigated) ‘equalweights’ solution. An improvement between 17 and 38% inheight accuracy was achieved when an epoch by epoch dif-ferential solution was computed over baselines ranging from1 to 750 km. The method was then compared with alterna-tive approaches that can be used to improve the least squaresstochastic model such as weighting according to satellite ele-vation angle and by the inverse of the square of the standarddeviation of the code/carrier divergence (sigma CCDiv). Theinfluence of multipath effects on the proposed mitigationapproach is also discussed. With the use of high rate scin-tillation data in addition to the scintillation indices a carrierphase based mitigated solution was also implemented andcompared with the conventional solution. During a period ofoccurrence of high phase scintillation it was observed thatproblems related to ambiguity resolution can be reduced bythe use of the proposed mitigated solution.
Keywords Global navigation satellites system · Globalpositioning system · Ionospheric scintillation · Receivertracking models · Mitigation · Stochastic model
1 Introduction
At high latitudes, the effects of ionospheric scintillations onGNSS are exacerbated during solar maximum, when geo-magnetic storms may occur in connection with enhancedsolar activity. The polar ionosphere may become highly tur-bulent leading to scintillation scenarios, as for instance in thenorthern hemisphere during the severe storms of October andNovember 2003 (e.g De Franceschi et al. 2008). The adverse
123

954 M. Aquino et al.
effects of events of this type on GNSS positioning and onthe performance of augmentation services (such as WAAS,the US Wide Area Augmentation System and EGNOS, theEuropean Geostationary Navigation Overlay System) havebeen reported in the literature by several authors (e.g. Mooreet al. 2002; Skone et al. 2004; Grejner-Brzezinska et al. 2006;Aquino et al. 2005a,b, 2007a; Alfonsi et al. 2006).
Ionospheric irregularities causing scintillations tend toform mostly within the irregularity oval, defined as a mod-ification of the auroral oval, which expands and contractsunder varied geomagnetic conditions (Aarons 1997). Theirregularity oval is approximately the auroral oval and dur-ing periods of low solar and magnetic activity is also lessintense and contracts to higher latitudes, whereas during ageomagnetic storm it moves equatorward. Scintillation isexpected to occur during instances when a signal from aGNSS satellite traverses the ionosphere inside the region ofthe irregularity oval. The impact of scintillations on GPSpositioning may be severe, including loss of signal track-ing and positioning accuracy degradation (e.g. Aquino et al.2005a,b). The latter occurs mostly due to some of the satel-lites being affected by scintillation as their links traverse theirregularities. User position computation is accomplished bythe receiver through a least squares process where the mea-surements from all satellites in view are usually consideredof the same quality. Ideally the satellite-receiver links mostaffected should be isolated and left out of the solution; how-ever this would be detrimental to the quality of the resultinggeometry.
It is beyond the scope of this paper to enter into thephysical aspects of the ionospheric irregularities causingscintillations. Its aim is rather to present an original math-ematical approach possibly useful for future application toGNSS receivers. We present a strategy to calculate and applyweights to measurements from different satellite links, whichcould be advantageous to use under scintillation conditions.The widely used scintillation indices (S4 and σϕ—see VanDierendonck et al. 1993 and Van Dierendonck 2001 fordetails on these indices and their measurement) and highrate data were collected by specially modified GPS receiversable to record the phase and amplitude of the L1 signals (VanDierendonck et al. 1993). Such data, acquired during peri-ods of high geomagnetic activity, were used to calculate thecode and carrier phase tracking error variance according tothe models described by Conker et al. (2003). The capabilityof translating phase and amplitude scintillation effects intothe variance of the tracking errors underpins our proposedmethod of applying relative weights to measurements fromdifferent satellites, giving a more realistic representation tothe least squares stochastic model used in position compu-tation. Under the experimental circumstances described inthis paper, results show that the proposed method leads tocorrectly assigning relative weights to the observations, an
indication also that the models of Conker et al. (2003) cansuccessfully predict the receiver tracking errors. For a gen-eral use of these tracking models and restrictions on theirvalidity the reader is referred to Conker et al. (2003).
In Sect. 2, we discuss our approach, first introducing thereceiver tracking models of Conker et al. (2003) and thenpresenting our strategy to improve the least squares stochas-tic model. In Sect. 3, we give a brief description of theexperimental setup. In Sect. 4, we show the results of ourexperiments for pseudorange processing, while discussingthe influence of multipath against actual scintillation occur-rence. Section 5 refers to initial findings when the carrierphase is introduced. Section 6 contains our conclusions.
2 Method
2.1 Receiver tracking models
We consider that, during the occurrence of scintillation, rangemeasurements (of both pseudorange and carrier phase) madeby a GPS receiver to different satellites are degraded differ-ently, depending on how each link is affected by the irregu-larities in the ionosphere. We suggest that the variances of theoutput error of the receiver’s DLL (Delay Locked Loop) andPLL (Phase Locked Loop), can be used to express, respec-tively, the degree of degradation of the pseudorange and thecarrier phase measurements. The DLL maintains the exactalignment between the received and the locally generatedcodes, its output being directly related to the accuracy of thesignal travel time and therefore to the pseudorange measure-ments. The PLL minimizes the error between the input phaseand its estimated phase output, which feeds the receiver pro-cessor. The loop will remain in lock or not depending on themagnitude of this error. For the pseudoranges, the modelsof Conker et al. (2003) calculate the variance of the outputcode tracking errors from a first order DLL for L1 GPS codeand from a first order DLL for L2 semicodeless aided by L1.For the variance of the output phase tracking error, Conkeret al. (2003) presents models for two common types of PLL:a third-order L1 carrier PLL and a second-order L1-aided L2carrier PLL, the latter also referred to as L2 semicodeless. Weused these models to compute the variance of the code andphase tracking errors (or tracking jitters), which are functionsof the receiver hardware parameters and, respectively of theS4 amplitude scintillation index and of the spectral parame-ters (the slope p, and the strength at 1 Hz, T ) of the PowerSpectral Density (PSD) of phase scintillation (obtained fromhigh rate data, see below). Our proposed technique is basedon the establishment of weights given by the inverse of thevariance of these tracking errors. These weights form thebasis of a modified least squares stochastic model that isthen used for position computation.
123
Improving the GNSS positioning stochastic model 955
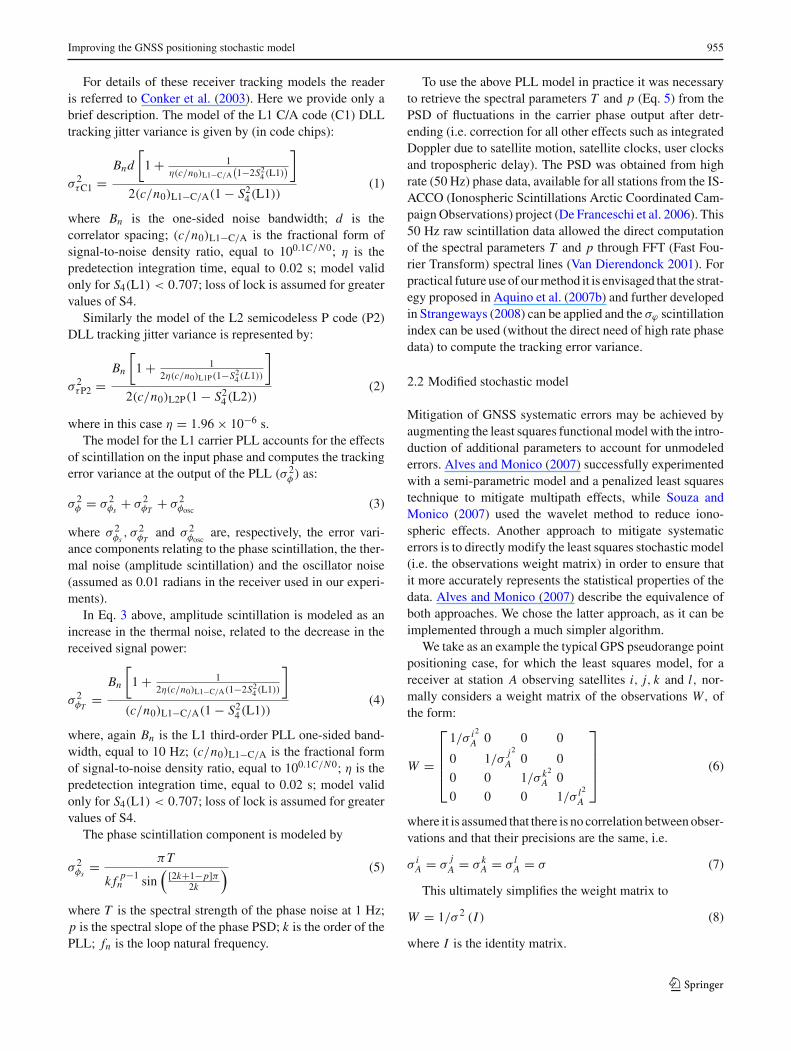
For details of these receiver tracking models the readeris referred to Conker et al. (2003). Here we provide only abrief description. The model of the L1 C/A code (C1) DLLtracking jitter variance is given by (in code chips):
σ 2τC1 =
Bnd
[1 + 1
η(c/n0)L1−C/A(1−2S2
4 (L1))]
2(c/n0)L1−C/A(1 − S24 (L1))
(1)
where Bn is the one-sided noise bandwidth; d is thecorrelator spacing; (c/n0)L1−C/A is the fractional form ofsignal-to-noise density ratio, equal to 100.1C/N0; η is thepredetection integration time, equal to 0.02 s; model validonly for S4(L1) < 0.707; loss of lock is assumed for greatervalues of S4.
Similarly the model of the L2 semicodeless P code (P2)DLL tracking jitter variance is represented by:
σ 2τP2 =
Bn
[1 + 1
2η(c/n0)L1P(1−S24 (L1))
]
2(c/n0)L2P(1 − S24 (L2))
(2)
where in this case η = 1.96 × 10−6 s.The model for the L1 carrier PLL accounts for the effects
of scintillation on the input phase and computes the trackingerror variance at the output of the PLL (σ 2
φ ) as:
σ 2φ = σ 2
φs+ σ 2
φT+ σ 2
φosc(3)
where σ 2φs
, σ 2φT
and σ 2φosc
are, respectively, the error vari-ance components relating to the phase scintillation, the ther-mal noise (amplitude scintillation) and the oscillator noise(assumed as 0.01 radians in the receiver used in our experi-ments).
In Eq. 3 above, amplitude scintillation is modeled as anincrease in the thermal noise, related to the decrease in thereceived signal power:
σ 2φT
=Bn
[1 + 1
2η(c/n0)L1−C/A(1−2S24 (L1))
]
(c/n0)L1−C/A(1 − S24 (L1))
(4)
where, again Bn is the L1 third-order PLL one-sided band-width, equal to 10 Hz; (c/n0)L1−C/A is the fractional formof signal-to-noise density ratio, equal to 100.1C/N0; η is thepredetection integration time, equal to 0.02 s; model validonly for S4(L1) < 0.707; loss of lock is assumed for greatervalues of S4.
The phase scintillation component is modeled by
σ 2φs
= πT
k f p−1n sin
( [2k+1−p]π2k
) (5)
where T is the spectral strength of the phase noise at 1 Hz;p is the spectral slope of the phase PSD; k is the order of thePLL; fn is the loop natural frequency.
To use the above PLL model in practice it was necessaryto retrieve the spectral parameters T and p (Eq. 5) from thePSD of fluctuations in the carrier phase output after detr-ending (i.e. correction for all other effects such as integratedDoppler due to satellite motion, satellite clocks, user clocksand tropospheric delay). The PSD was obtained from highrate (50 Hz) phase data, available for all stations from the IS-ACCO (Ionospheric Scintillations Arctic Coordinated Cam-paign Observations) project (De Franceschi et al. 2006). This50 Hz raw scintillation data allowed the direct computationof the spectral parameters T and p through FFT (Fast Fou-rier Transform) spectral lines (Van Dierendonck 2001). Forpractical future use of our method it is envisaged that the strat-egy proposed in Aquino et al. (2007b) and further developedin Strangeways (2008) can be applied and the σϕ scintillationindex can be used (without the direct need of high rate phasedata) to compute the tracking error variance.
2.2 Modified stochastic model
Mitigation of GNSS systematic errors may be achieved byaugmenting the least squares functional model with the intro-duction of additional parameters to account for unmodelederrors. Alves and Monico (2007) successfully experimentedwith a semi-parametric model and a penalized least squarestechnique to mitigate multipath effects, while Souza andMonico (2007) used the wavelet method to reduce iono-spheric effects. Another approach to mitigate systematicerrors is to directly modify the least squares stochastic model(i.e. the observations weight matrix) in order to ensure thatit more accurately represents the statistical properties of thedata. Alves and Monico (2007) describe the equivalence ofboth approaches. We chose the latter approach, as it can beimplemented through a much simpler algorithm.
We take as an example the typical GPS pseudorange pointpositioning case, for which the least squares model, for areceiver at station A observing satellites i, j, k and l, nor-mally considers a weight matrix of the observations W, ofthe form:
W =
⎡⎢⎢⎢⎣
1/σ i2
A 0 0 0
0 1/σj2
A 0 0
0 0 1/σ k2
A 0
0 0 0 1/σ l2
A
⎤⎥⎥⎥⎦ (6)
where it is assumed that there is no correlation between obser-vations and that their precisions are the same, i.e.
σ iA = σ
jA = σ k
A = σ lA = σ (7)
This ultimately simplifies the weight matrix to
W = 1/σ 2 (I ) (8)
where I is the identity matrix.
123

956 M. Aquino et al.
Clearly, this weight matrix will become more complexwhen different observables, combining different satellitesand stations, are considered. For instance, in a double differ-ence pseudorange solution, as the observable involves twosatellites and two stations, correlation between observationsmust be accounted for. However the assumption that all mea-surements are of the same precision is still usual practice,which simplifies the stochastic model. For instance, whenfour satellites are observed, the double difference weightmatrix Wdd assumes the form:
Wdd = 1/σ 2
⎡⎣ 4 2 2
2 4 22 2 4
⎤⎦
−1
(9)
3 Experimental setup
We tested our method initially on a relative solution. Theexperiments were undertaken during periods ionosphericallydisturbed, so that it was not expected that errors related tothe ionosphere, in particular scintillation, would cancel outby differentiation. We used UNESP (São Paulo State Uni-versity)’s in-house GPS double difference software GPSeqto compare the accuracy on baseline computation based ona conventional, ‘non-mitigated’, or ‘equal weights’ solutionagainst a ‘mitigated’ solution using the approach describedin Sect. 2. This software uses double differences of C1 (L1C/A code) and P2 (L2 P code) pseudoranges, but also allowsthe inclusion of L1 and L2 carrier phase data, on an epochby epoch solution. The user can choose between a pseudor-ange-only solution or a pseudorange/carrier phase combinedsolution. It is important to note that all the available observ-ables at each epoch, in our case the C/A and P2 pseudoranges(and the L1 and L2 carrier phase ranges, if these are to beincluded), are used and that the algorithm does not performany linear combination of them (i.e. for instance no iono-free linear combination is attempted). In its original version,the software assigns relative weights between the differentobservables, which however are the same for all satellitesat all epochs. The proposed mitigated solution is obtainedby modifying the stochastic model with the introduction ofsatellite and epoch specific weights based on the inverse ofthe variances of the output error of the GPS receiver DLLand PLL (of L1 and L2), calculated by the models of Conkeret al. (2003). GPSeq was modified to include this option.
The receivers used in the experiments were the GISTMs(GPS Ionospheric Scintillations and TEC Monitor)(Van Dierendonck et al. 1993), so the S4 and σφ indicesrequired for the computations were readily available.Although these receivers have not been designed for use ingeodetic applications, previous experiments involvingpseudorange and carrier phase processing with GISTM data
resulted in accuracies compatible with geodetic gradereceivers (e.g. Aquino et al. 2005a,b, 2007a). As explainedin 2.1, the spectral parameters T and p could be retrievedfrom 50 Hz data also recorded by the GISTMs. As in a realworld situation one would not expect all these data to bereadily available, this paper is primarily intended as a proofof concept.
The GISTM is a dual-frequency OEM4 NovAtel cardmodified by AJ Systems to measure and log phase and ampli-tude scintillation data based on L1 GPS frequency data sam-pled at 50 Hz (see Van Dierendonck 2001). The INGV haspermanently deployed GISTMs at Svalbard (Norway), in theframe of the ISACCO project (De Franceschi et al. 2006)and has stored the corresponding data in a publicly accessi-ble database (http://www.eswua.ingv.it, Romano et al. 2007).The IESSG had deployed 4 GISTMs in UK and Norway dur-ing part of the latest solar maximum (June 2001 to December2003). Recently another GISTM was installed by the IESSGin Dourbes, Belgium, in collaboration with the Royal Meteo-rological Institute. The analyses presented in this paper referto data collected by these receivers over a region rangingfrom ∼50◦N to ∼80◦N in geographic latitude, as shown inFig. 1.
After a selection of days of disturbed geomagnetic con-ditions, when the planetary geomagnetic index Kp is ≥ 4and ionospheric scintillations are more likely to occur inthe region being studied (see statistical analyses in Rodri-gues et al. 2004), different baselines were processed. Table 1describes these baselines and corresponding geomagneticconditions.
4 Pseudorange processing
4.1 Overall assessment
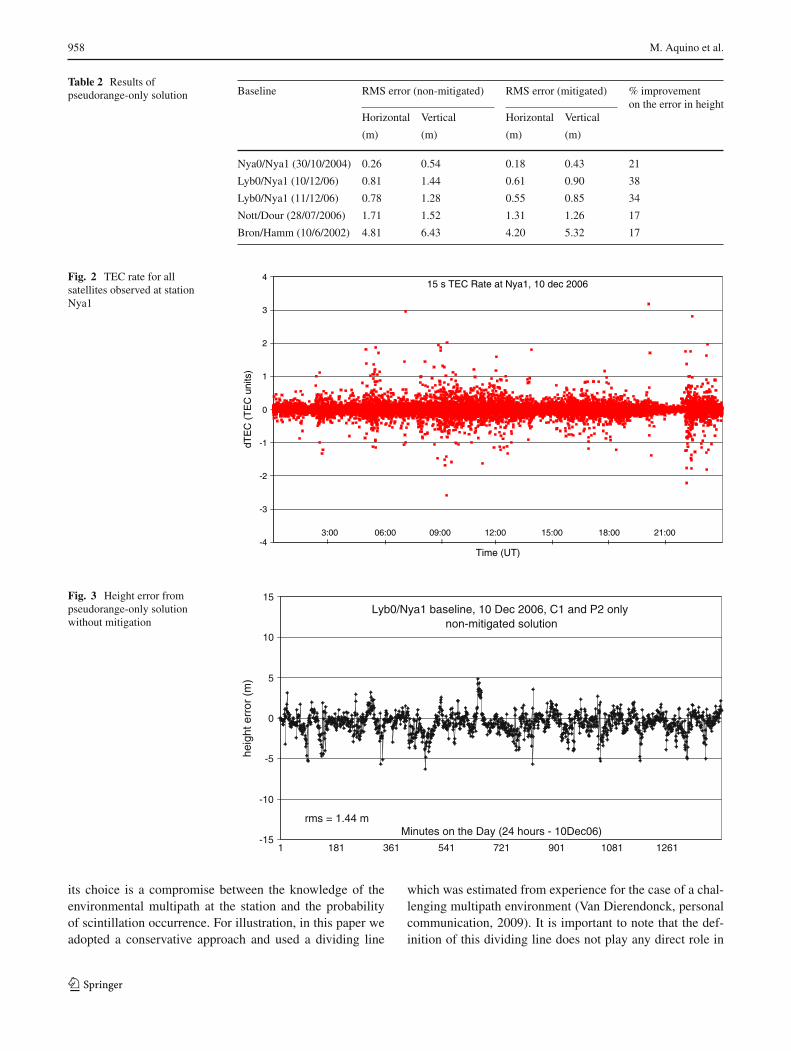
At initial experiments we applied the technique on a C1and P2 pseudorange-only solution, as previously reported inAquino et al. (2006). For an overall assessment of the method,each baseline (Table 1) was processed on a 1 min epoch byepoch solution using the GPSeq software, for a period of 24 hduring which elevated values of the scintillation indices wereobserved. No modeling of error sources such as the tropo-sphere and the background ionosphere was attempted, nei-ther for the mitigated nor the non-mitigated solution, so thatthey could be compared. Each baseline solution is analysedindividually. Results were compared with accurately deter-mined ground truth coordinates of the stations. Table 2 givesa summary of the results for a non-mitigated solution againstthe proposed mitigated solution, showing the improvementon the horizontal and vertical components when the pro-posed approach is applied. In the last column of Table 2, weshow the percentage improvement on the error in height, the
123

Improving the GNSS positioning stochastic model 957
Fig. 1 Network of receiversused in the experiments
Table 1 Description of baselines processed
Baseline Length Date Maximum(km) Kp
Nya0/Nya1 1 30/10/2004 6
Lyb0/Nya1 125 10/12/2006 4
Lyb0/Nya1 125 11/12/2006 5
Nott/Dour 511 28/07/2006 6
Bron/Hamm 752 10/06/2002 5
component usually most affected by the ionosphere. It isevident from Table 2 that the proposed method leads to animproved least squares solution by correctly assigning rela-tive weights to the observations.
These results indicate that the improved stochastic modelcan successfully mitigate both horizontal and vertical errors.However, for the remainder of this paper we concentrate onthe errors in height, assuming these to represent, in mostinstances, the worst case scenario. More detailed analyses onhorizontal effects will be the subject of follow-on research.
Results for baseline Lyb0/Nya1 on 10/12/2006 were fur-ther analysed. Figure 2 shows the state of the ionosphereby the 15 s TEC rate for all satellites observed at stationNya1. The 15 s TEC rate is the change in TEC for a par-ticular satellite/receiver link during a 15-s period, calculatedbased on the carrier phase measurements at L1 and L2 to thatsatellite.
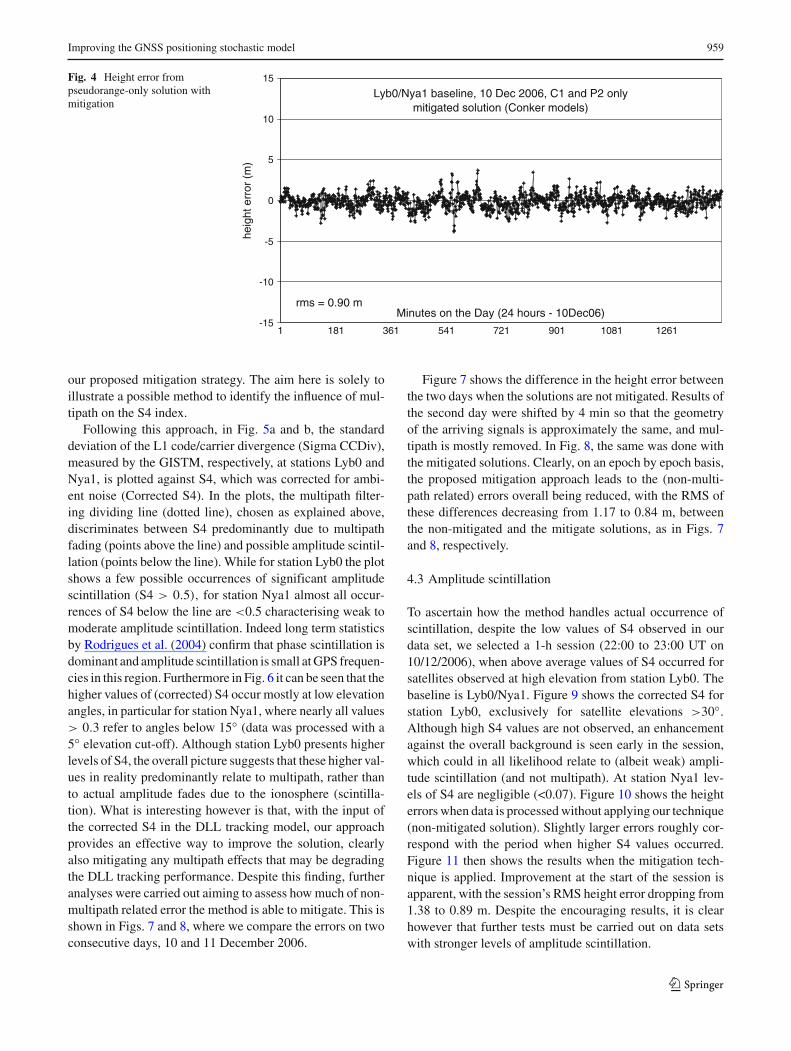
Figures 3 and 4 are the time series of the height errorsrespectively for the non-mitigated solution and the solutionbased on our approach. The improvement is quite significant,
with the exception of very few epochs when the mitigatedsolution worsens the results (epoch 562 the most notableone). A possible reason is that the S4 index of a satellite pre-sented sudden jumps at these epochs, which may relate toreceiver firmware miscomputations that occasionally occur.These jumps lead to assigning a poor precision to the rangeof that satellite, and to the wrong stochastic representationof the data.
4.2 Multipath considerations
In order to investigate the influence of multipath and to dis-criminate between potential multipath fades and actual occur-rence of amplitude scintillation (measured by S4) we used theapproach suggested by Van Dierendonck (2001). The basisof this approach is the fact that in the presence of multi-path the divergence of code/carrier phase is faster than thedivergence due to the ionosphere. The GISTM receiver cal-culates the code/carrier divergence every second, estimat-ing their average and standard deviation every minute onthe minute. The standard deviation of the code/carrier diver-gence can then be used to distinguish between S4 due tomultipath and S4 due to scintillation, as there is no diver-gence due to scintillation (GPS Silicon Valley 2004). If thevalues of the standard deviation of code/carrier divergenceare plotted against S4 values, true amplitude scintillationwill be associated with low standard deviations, while multi-path will be associated with high standard deviations. Basedon this plot, the method uses a dividing line to distinguishbetween multipath and amplitude scintillation. This lineis only an approximation to filter out multipath and
123
958 M. Aquino et al.
Table 2 Results ofpseudorange-only solution Baseline RMS error (non-mitigated) RMS error (mitigated) % improvement
on the error in heightHorizontal Vertical Horizontal Vertical
(m) (m) (m) (m)
Nya0/Nya1 (30/10/2004) 0.26 0.54 0.18 0.43 21
Lyb0/Nya1 (10/12/06) 0.81 1.44 0.61 0.90 38
Lyb0/Nya1 (11/12/06) 0.78 1.28 0.55 0.85 34
Nott/Dour (28/07/2006) 1.71 1.52 1.31 1.26 17
Bron/Hamm (10/6/2002) 4.81 6.43 4.20 5.32 17
Fig. 2 TEC rate for allsatellites observed at stationNya1
15 s TEC Rate at Nya1, 10 dec 2006
-4
-3
-2
-1
0
1
2
3
4
Time (UT)
dTE
C (
TE
C u
nits
)
II II I II3:00 06:00 09:00 12:00 15:00 18:00 21:00
Fig. 3 Height error frompseudorange-only solutionwithout mitigation
Lyb0/Nya1 baseline, 10 Dec 2006, C1 and P2 only non-mitigated solution
-15
-10
-5
0
5
10
15
1 181 361 541 721 901 1081 1261
Minutes on the Day (24 hours - 10Dec06)
heig
ht e
rror
(m
)
rms = 1.44 m
its choice is a compromise between the knowledge of theenvironmental multipath at the station and the probabilityof scintillation occurrence. For illustration, in this paper weadopted a conservative approach and used a dividing line
which was estimated from experience for the case of a chal-lenging multipath environment (Van Dierendonck, personalcommunication, 2009). It is important to note that the def-inition of this dividing line does not play any direct role in
123
Improving the GNSS positioning stochastic model 959
Fig. 4 Height error frompseudorange-only solution withmitigation
Lyb0/Nya1 baseline, 10 Dec 2006, C1 and P2 onlymitigated solution (Conker models)
-15
-10
-5
0
5
10
15
1 181 361 541 721 901 1081 1261
Minutes on the Day (24 hours - 10Dec06)
heig
ht e
rror
(m
)
rms = 0.90 m
our proposed mitigation strategy. The aim here is solely toillustrate a possible method to identify the influence of mul-tipath on the S4 index.
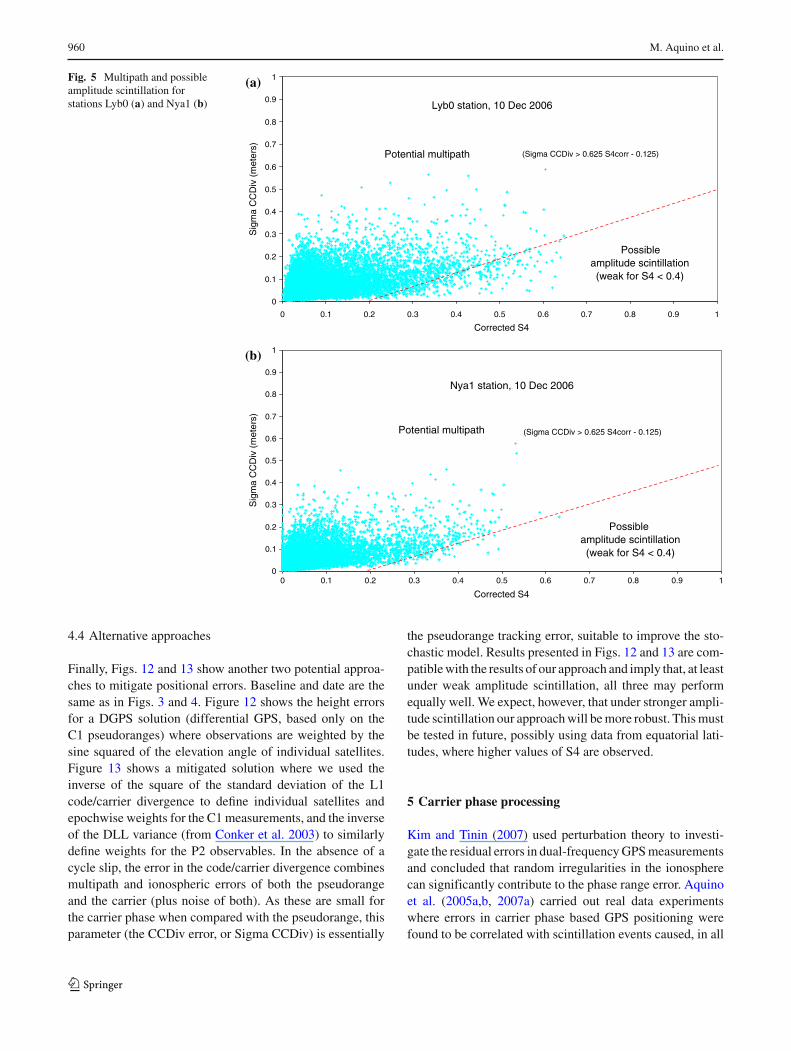
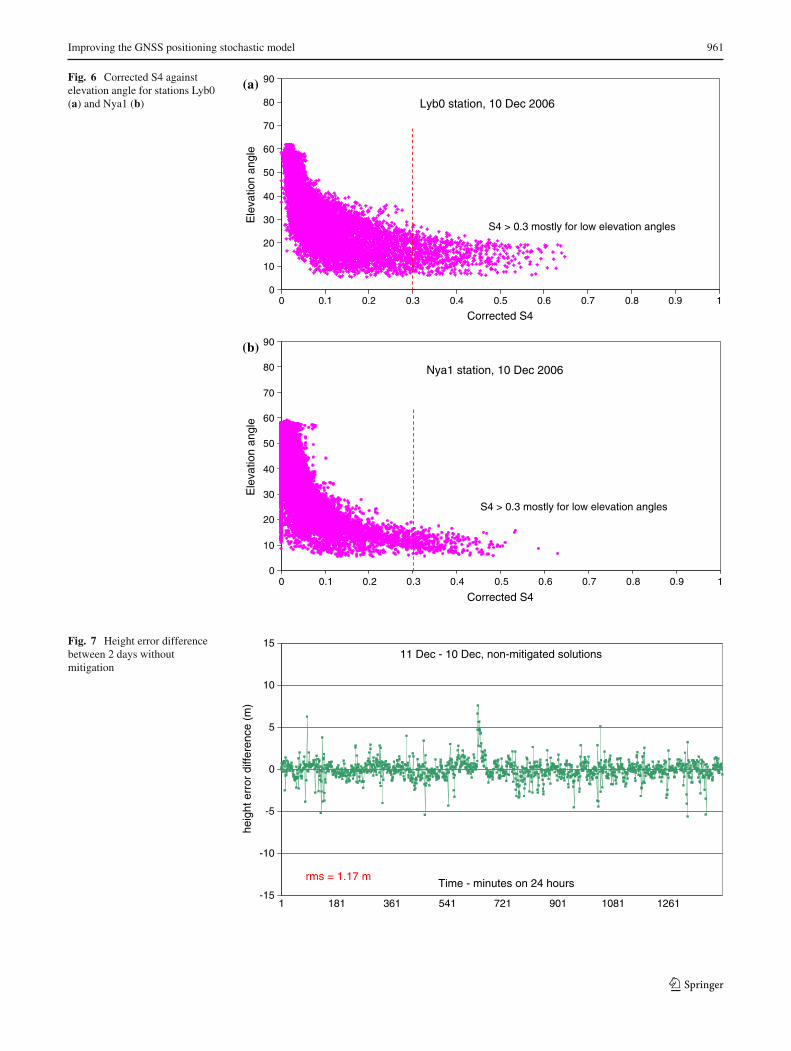
Following this approach, in Fig. 5a and b, the standarddeviation of the L1 code/carrier divergence (Sigma CCDiv),measured by the GISTM, respectively, at stations Lyb0 andNya1, is plotted against S4, which was corrected for ambi-ent noise (Corrected S4). In the plots, the multipath filter-ing dividing line (dotted line), chosen as explained above,discriminates between S4 predominantly due to multipathfading (points above the line) and possible amplitude scintil-lation (points below the line). While for station Lyb0 the plotshows a few possible occurrences of significant amplitudescintillation (S4 > 0.5), for station Nya1 almost all occur-rences of S4 below the line are <0.5 characterising weak tomoderate amplitude scintillation. Indeed long term statisticsby Rodrigues et al. (2004) confirm that phase scintillation isdominant and amplitude scintillation is small at GPS frequen-cies in this region. Furthermore in Fig. 6 it can be seen that thehigher values of (corrected) S4 occur mostly at low elevationangles, in particular for station Nya1, where nearly all values> 0.3 refer to angles below 15◦ (data was processed with a5◦ elevation cut-off). Although station Lyb0 presents higherlevels of S4, the overall picture suggests that these higher val-ues in reality predominantly relate to multipath, rather thanto actual amplitude fades due to the ionosphere (scintilla-tion). What is interesting however is that, with the input ofthe corrected S4 in the DLL tracking model, our approachprovides an effective way to improve the solution, clearlyalso mitigating any multipath effects that may be degradingthe DLL tracking performance. Despite this finding, furtheranalyses were carried out aiming to assess how much of non-multipath related error the method is able to mitigate. This isshown in Figs. 7 and 8, where we compare the errors on twoconsecutive days, 10 and 11 December 2006.
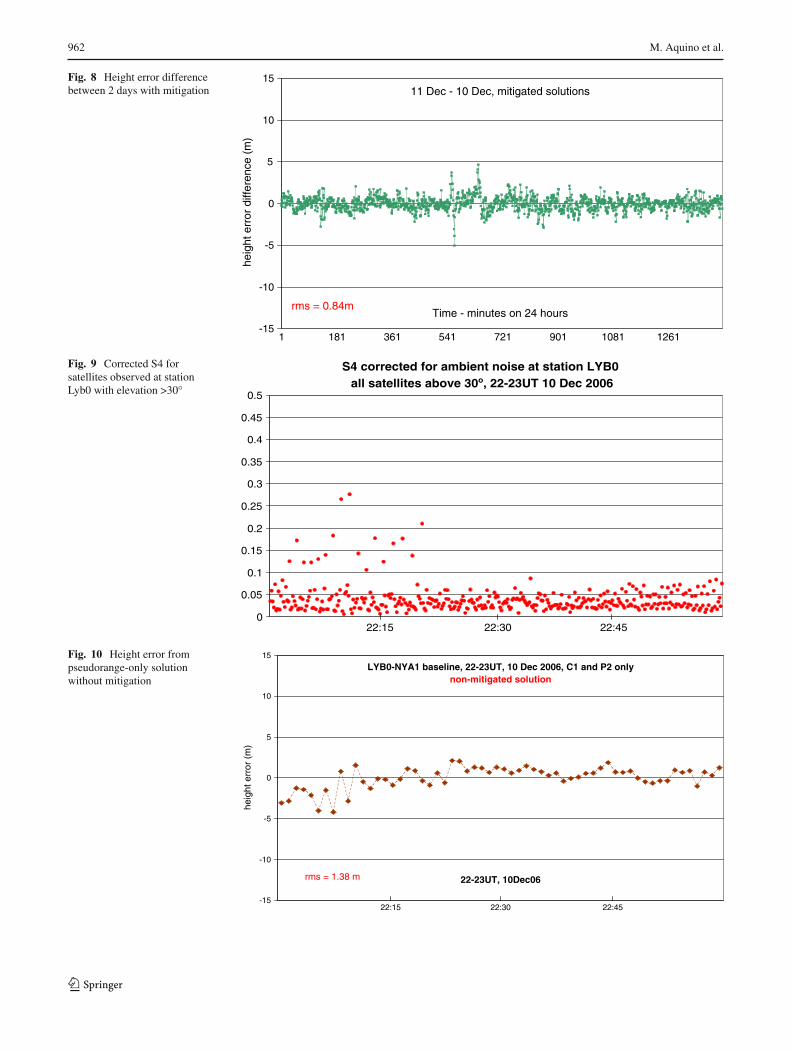
Figure 7 shows the difference in the height error betweenthe two days when the solutions are not mitigated. Results ofthe second day were shifted by 4 min so that the geometryof the arriving signals is approximately the same, and mul-tipath is mostly removed. In Fig. 8, the same was done withthe mitigated solutions. Clearly, on an epoch by epoch basis,the proposed mitigation approach leads to the (non-multi-path related) errors overall being reduced, with the RMS ofthese differences decreasing from 1.17 to 0.84 m, betweenthe non-mitigated and the mitigate solutions, as in Figs. 7and 8, respectively.
4.3 Amplitude scintillation
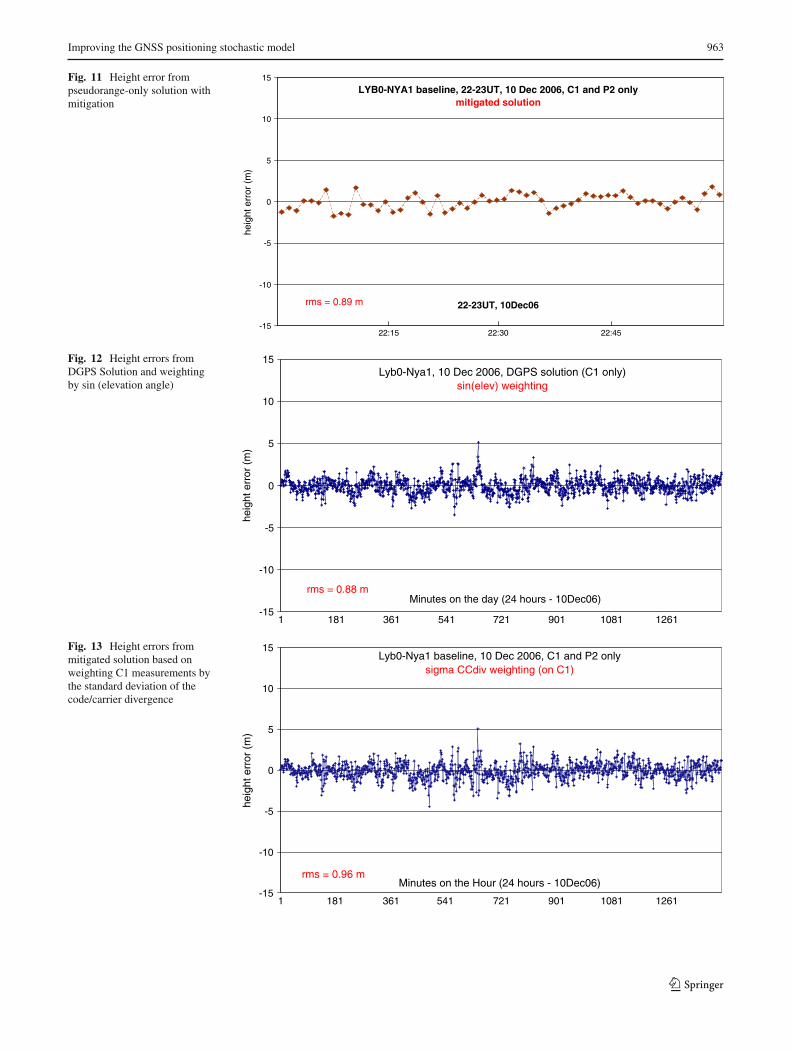
To ascertain how the method handles actual occurrence ofscintillation, despite the low values of S4 observed in ourdata set, we selected a 1-h session (22:00 to 23:00 UT on10/12/2006), when above average values of S4 occurred forsatellites observed at high elevation from station Lyb0. Thebaseline is Lyb0/Nya1. Figure 9 shows the corrected S4 forstation Lyb0, exclusively for satellite elevations >30◦.Although high S4 values are not observed, an enhancementagainst the overall background is seen early in the session,which could in all likelihood relate to (albeit weak) ampli-tude scintillation (and not multipath). At station Nya1 lev-els of S4 are negligible (<0.07). Figure 10 shows the heighterrors when data is processed without applying our technique(non-mitigated solution). Slightly larger errors roughly cor-respond with the period when higher S4 values occurred.Figure 11 then shows the results when the mitigation tech-nique is applied. Improvement at the start of the session isapparent, with the session’s RMS height error dropping from1.38 to 0.89 m. Despite the encouraging results, it is clearhowever that further tests must be carried out on data setswith stronger levels of amplitude scintillation.
123
960 M. Aquino et al.
Fig. 5 Multipath and possibleamplitude scintillation forstations Lyb0 (a) and Nya1 (b) Lyb0 station, 10 Dec 2006
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Corrected S4
Sig
ma
CC
Div
(m
eter
s)
Potential multipath
Possible amplitude scintillation(weak for S4 < 0.4)
(Sigma CCDiv > 0.625 S4corr - 0.125)
Nya1 station, 10 Dec 2006
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Corrected S4
Sig
ma
CC
Div
(m
eter
s)
Potential multipath
Possible amplitude scintillation(weak for S4 < 0.4)
(Sigma CCDiv > 0.625 S4corr - 0.125)
(a)
(b)
4.4 Alternative approaches
Finally, Figs. 12 and 13 show another two potential approa-ches to mitigate positional errors. Baseline and date are thesame as in Figs. 3 and 4. Figure 12 shows the height errorsfor a DGPS solution (differential GPS, based only on theC1 pseudoranges) where observations are weighted by thesine squared of the elevation angle of individual satellites.Figure 13 shows a mitigated solution where we used theinverse of the square of the standard deviation of the L1code/carrier divergence to define individual satellites andepochwise weights for the C1 measurements, and the inverseof the DLL variance (from Conker et al. 2003) to similarlydefine weights for the P2 observables. In the absence of acycle slip, the error in the code/carrier divergence combinesmultipath and ionospheric errors of both the pseudorangeand the carrier (plus noise of both). As these are small forthe carrier phase when compared with the pseudorange, thisparameter (the CCDiv error, or Sigma CCDiv) is essentially
the pseudorange tracking error, suitable to improve the sto-chastic model. Results presented in Figs. 12 and 13 are com-patible with the results of our approach and imply that, at leastunder weak amplitude scintillation, all three may performequally well. We expect, however, that under stronger ampli-tude scintillation our approach will be more robust. This mustbe tested in future, possibly using data from equatorial lati-tudes, where higher values of S4 are observed.
5 Carrier phase processing
Kim and Tinin (2007) used perturbation theory to investi-gate the residual errors in dual-frequency GPS measurementsand concluded that random irregularities in the ionospherecan significantly contribute to the phase range error. Aquinoet al. (2005a,b, 2007a) carried out real data experimentswhere errors in carrier phase based GPS positioning werefound to be correlated with scintillation events caused, in all
123
Improving the GNSS positioning stochastic model 961
Fig. 6 Corrected S4 againstelevation angle for stations Lyb0(a) and Nya1 (b) Lyb0 station, 10 Dec 2006
0
10
20
30
40
50
60
70
80
90
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Corrected S4
Ele
vatio
n an
gle
S4 > 0.3 mostly for low elevation angles
Nya1 station, 10 Dec 2006
0
10
20
30
40
50
60
70
80
90
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Corrected S4
Ele
vatio
n an
gle
S4 > 0.3 mostly for low elevation angles
(a)
(b)
Fig. 7 Height error differencebetween 2 days withoutmitigation
11 Dec - 10 Dec, non-mitigated solutions
-15
-10
-5
0
5
10
15
1 181 361 541 721 901 1081 1261
Time - minutes on 24 hours
heig
ht e
rror
diff
eren
ce (
m)
rms = 1.17 m
123
962 M. Aquino et al.
Fig. 8 Height error differencebetween 2 days with mitigation 11 Dec - 10 Dec, mitigated solutions
-15
-10
-5
0
5
10
15
1 181 361 541 721 901 1081 1261
Time - minutes on 24 hours
heig
ht e
rror
diff
eren
ce (
m)
rms = 0.84m
Fig. 9 Corrected S4 forsatellites observed at stationLyb0 with elevation >30◦
S4 corrected for ambient noise at station LYB0 all satellites above 30o, 22-23UT 10 Dec 2006
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
22:15 22:30 22:45
Fig. 10 Height error frompseudorange-only solutionwithout mitigation
LYB0-NYA1 baseline, 22-23UT, 10 Dec 2006, C1 and P2 onlynon-mitigated solution
-15
-10
-5
0
5
10
15
22-23UT, 10Dec06
heig
ht e
rror
(m
)
rms = 1.38 m
22:15 22:30 22:45
123
Improving the GNSS positioning stochastic model 963
Fig. 11 Height error frompseudorange-only solution withmitigation
LYB0-NYA1 baseline, 22-23UT, 10 Dec 2006, C1 and P2 onlymitigated solution
-15
-10
-5
0
5
10
15
22-23UT, 10Dec06
heig
ht e
rror
(m
)
rms = 0.89 m
22:15 22:30 22:45
Fig. 12 Height errors fromDGPS Solution and weightingby sin (elevation angle)
Lyb0-Nya1, 10 Dec 2006, DGPS solution (C1 only)sin(elev) weighting
-15
-10
-5
0
5
10
15
1 181 361 541 721 901 1081 1261
Minutes on the day (24 hours - 10Dec06)
heig
ht e
rror
(m
)
rms = 0.88 m
Fig. 13 Height errors frommitigated solution based onweighting C1 measurements bythe standard deviation of thecode/carrier divergence
Lyb0-Nya1 baseline, 10 Dec 2006, C1 and P2 onlysigma CCdiv weighting (on C1)
-15
-10
-5
0
5
10
15
1 181 361 541 721 901 1081 1261
Minutes on the Hour (24 hours - 10Dec06)
heig
ht e
rror
(m
)
rms = 0.96 m
123
964 M. Aquino et al.
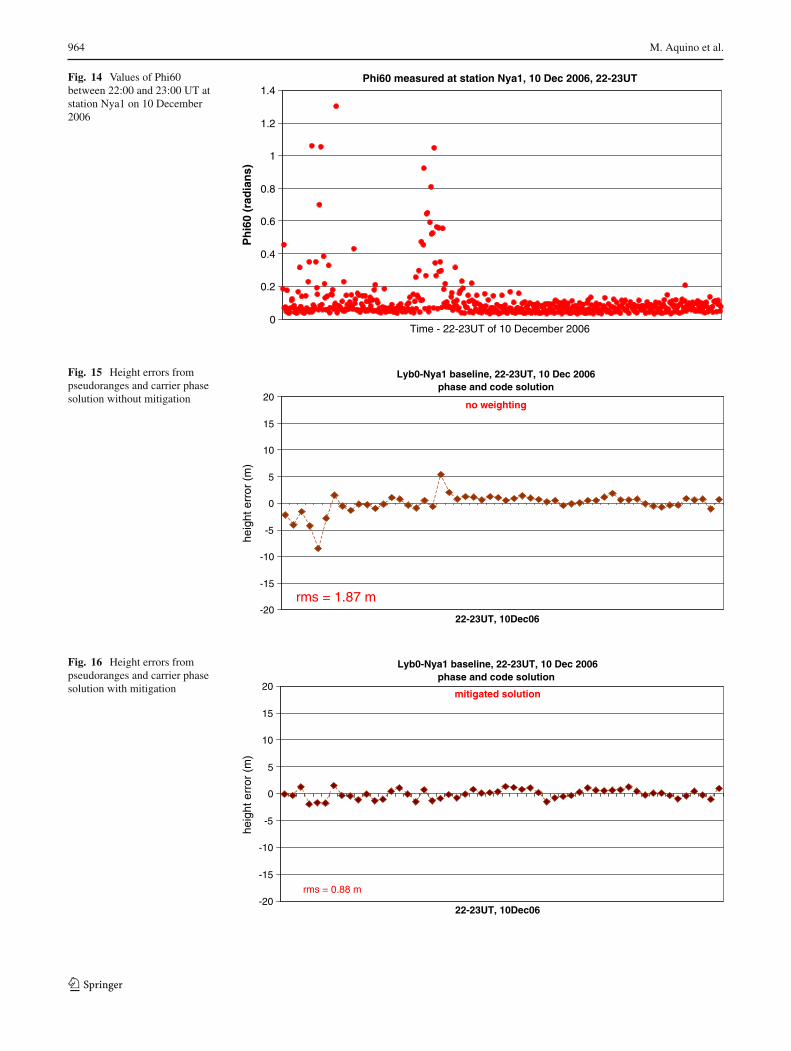
Fig. 14 Values of Phi60between 22:00 and 23:00 UT atstation Nya1 on 10 December2006
Phi60 measured at station Nya1, 10 Dec 2006, 22-23UT
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time - 22-23UT of 10 December 2006
Ph
i60
(rad
ian
s)
Fig. 15 Height errors frompseudoranges and carrier phasesolution without mitigation
Lyb0-Nya1 baseline, 22-23UT, 10 Dec 2006 phase and code solution
no weighting
-20
-15
-10
-5
0
5
10
15
20
22-23UT, 10Dec06
heig
ht e
rror
(m
)
rms = 1.87 m
Fig. 16 Height errors frompseudoranges and carrier phasesolution with mitigation
Lyb0-Nya1 baseline, 22-23UT, 10 Dec 2006phase and code solution
mitigated solution
-20
-15
-10
-5
0
5
10
15
20
22-23UT, 10Dec06
heig
ht e
rror
(m
)
rms = 0.88 m
123

Improving the GNSS positioning stochastic model 965
likelihood, by small scale ionospheric irregularities. In thispaper, initial experiments aiming to test the proposed mitiga-tion approach were carried out involving carrier phase data.GPSeq was used in a 1 min epoch by epoch solution based onboth pseudoranges and phase measurements on the L1 andL2 GPS frequencies. We analysed the 1-h session from base-line Lyb0/Nya1, between 22:00 and 23:00 UT on 10/12/2006.During that session strong GPS ionospheric phase scintilla-tion was observed by the GISTMs in the region. Figure 14shows the values of Phi60 (the 60 s version of σφ) observed atstation Nya1. For each epoch the 1 min 50 Hz data was usedto calculate the spectral parameters T and p from the corre-sponding PSD, as explained in Sect. 2.1. The height errors,again calculated from comparison against ground truth coor-dinates, for the non-mitigated and mitigated solutions areshown in Figs. 15 and 16, respectively. Figures 14 and 15show the correlation of larger height errors with high val-ues of Phi60. GPSeq uses the LAMBDA method (Teunissen1996) to resolve the carrier phase ambiguities. By analysingthe results of the method’s ratio test it was possible to ver-ify that GPSeq fixed the ambiguities only at certain epochs,exactly in coincidence with the periods of high phase scintil-lation occurrence, and that they were however fixed wrongly.Clearly, given the length of the baseline, fixing the ambigu-ities to their correct values would be very unlikely, howeverthe occurrence of scintillation somehow led to this outcomeand consequently to unreliable epochwise solutions (Fig. 15).Interestingly, when applying our mitigation approach, thefloat ambiguities solution prevails at all epochs, providingmore accurate solutions (Fig. 16).
For practical future use of the method in carrier phase posi-tioning it is envisaged that the strategy proposed in Aquinoet al. (2007b) and further developed in Strangeways (2008)can be applied, where the scintillation indices can be used(without the direct need of high rate phase data) to computethe PLL tracking error variance.
6 Conclusions
Ionospheric scintillations are caused by time-varying den-sity irregularities in the ionosphere, occurring more often atequatorial and high latitudes under external disturbed condi-tions. They can degrade navigation and positioning accuracyand may cause loss of signal tracking, disrupting safety-criti-cal applications, such as marine navigation and civil aviation.Degradation of accuracy due to the occurrence of scintillationcan also affect carrier phase based applications and in partic-ular disrupt the resolution of the ambiguities inherent to thecarrier phase observable. This paper describes a techniquethat was successfully used to counter the effects of scintilla-tions on GNSS positioning. The proposed approach is basedon data obtained from GPS scintillation monitor receivers
and on suitable receiver tracking models. Results indicatepotential for the development and implementation of algo-rithms that could be embedded in a scintillation monitoringnetwork with the aim to mitigate these effects. The exper-iments presented in this paper and corresponding results,although encouraging, are considered of a preliminary natureand further research is necessary for future usability of ourmethod. This paper is intended as a proof of concept, asclearly, normal receivers do not and will not in principlemeasure scintillation parameters. However, as scintillationprediction models are improved it is legitimate to imaginethat the method can be used in conjunction with one suchmodel, e.g. an improved WBMOD (Wide Band MODel)Ionospheric Scintillation Model (http://www.nwra-az.com/ionoscint/wbmod.html) or the GISM (Global IonosphereScintillation Model—Béniguel 2002). Furthermore themethod may also be used in post-processing, in particularin applications involving the carrier phase observable, asresults in Sect. 5 suggest. Plans are in place to undertakefurther investigations in this area which will take advantageof a common database that is being developed. Also, datafrom equatorial regions will be taken into account.
Acknowledgments Data used in this research was obtained throughfunding from the Engineering and Physical Sciences Research Council(EPSRC) in the UK and from the ISACCO Project, supported by theItalian Program of Antarctic Researches (PNRA). Thanks are due tothe Royal Society for two International Joint Project grants involvingIESSG, INGV and UNESP. This collaboration has also been motivatedby the work carried out within the COST296 MIERS (Mitigation ofIonospheric Effects on Radio Systems). Thanks are also due to CAPES(Brazilian Research Council) for providing funds to UNESP based co-authors.
References
Aarons J (1997) Global positioning system phase fluctuations at aurorallatitudes. J Geophys Res 102(A8):17219–17232
Alves DBM, Monico JFG (2007) Modifying the stochastic model tomitigate GPS systematic errors in relative positioning. IAG Sym-posia (Springer), vol 130, Chapter 26, pp 166–171
Alfonsi L, De Franceschi G, Romano V, Aquino M and Dodson A (2006)Positioning errors during the space weather event of October 2003.Location, ISSN 0973-4627, 1, issue 5
Aquino M, Rodrigues FS, Souter J, Moore T, Dodson A, WaughS (2005) Ionospheric scintillation and impact on GNSS usersin Northern Europe: results of a 3 year study. Space Commun20(1/2):17–30
Aquino M, Moore T, Dodson A, Waugh S, Souter J, RodriguesFS (2005) Implications of ionospheric scintillation for GNSSusers in Northern Europe. J Navig 58(2):241–256
Aquino M, Monico JFG, Dodson A, Marques H (2006) Mitigating theeffect of ionospheric scintillations on position estimates. In: onlineProceedings of ESA 3rd European space weather week, Brussels,Belgium. http://sidc.oma.be/esww3
Aquino M, Dodson A, Souter J, Moore T (2007a) Ionospheric scintil-lation effects on GPS carrier phase positioning accuracy: analysis
123
966 M. Aquino et al.
at Auroral and Sub-Auroral latitudes. IAG Symposia (Springer),vol 130, chapter 121, pp 859–866
Aquino M, Andreotti M, Dodson A, Strangeways H (2007) On the useof ionospheric scintillation indices as input to receiver trackingmodels. J Adv Space Res 40(3):426–435
Béniguel Y (2002) GISM, A Global Ionospheric Propagation Modelfor scintillations of transmitted signals. Radio Sci 37(3). doi:10.1029/2000RS002393
Conker RS, El-Arini MB, Hegarty CJ, Hsiao T (2003) Modeling theeffects of ionospheric scintillation on GPS/satellite-based aug-mentation system availability. Radio Sci 38(1):1001. doi:10.1029/2000RS002604
De Franceschi G, Alfonsi L, Romano V (2006) ISACCO: an Italianproject to monitor the high latitudes ionosphere by means of GPSreceivers. GPS Solut 10(4):263–267
De Franceschi G, Alfonsi L, Romano V, Aquino M, Dodson A, Mitch-ell C N, Wernik AW (2008) Dynamics of high latitude patchesand associated small scale irregularities. J Atmos Solar-TerrestrialPhys 70:879–888. doi:10.1016/j.jastp.2007.05.018
GPS Silicon Valley (2004) GSV4004/GSV4004A GPS IonosphericScintillation and TEC Monitor (GISTM) User’s Manual
Grejner-Brzezinska D, Wielgosz P, Kashani I, Smith DA, Robertson DS,Mader GL, Komjathy A (2006) The impact of severe ionosphericconditions on the accuracy of kinematic position estimation: per-formance analysis of various ionospheric modeling techniques.Navigation 53(3):203–217
Kim BC, Tinin MV (2007) Contribution of ionospheric irregularities tothe error of dual-frequency GNSS positioning. J Geod 81(3):189–199
Moore T, Aquino M, Waugh S, Dodson A, Hill C (2002) Evaluationof the EGNOS ionospheric correction model under scintillation inNorthern Europe. In: Proceedings of the 15th technical meeting
of the satellite division of the Institute of Navigation: ION GPS2002, Portland, Oregon, USA, pp 1297–1306
Rodrigues FS, Aquino M, Dodson A, Moore T, Waugh S (2004) Statis-tical analysis of GPS ionospheric scintillation and short-time TECvariations over Northern Europe. J Inst Navig 51(1):59–75
Romano V, Pau S, Pezzopane M, Zuccheretti E, Zolesi B, De FranceschiG, Locatelli S (2007) The electronic space weather upper atmo-sphere (eSWua) project at INGV: advancements and state of theart. Ann Geophys 25:1–7 (in press)
Skone S, Yousuf R, Coster A (2004) Performance evaluation of theWide Area Augmentation System for ionospheric storm events.J Glob Position Syst 3(1–2):251–258
Souza EM, Monico JFG (2007) The wavelet method as an alternativefor reducing ionospheric effects from L1 GPS receivers. J Geod81(12):799–804
Strangeways HJ (2008) Determining scintillation effects on GPS receiv-ers. In: Proceedings of the 12th international ionospheric effectssymposium IES2008, Alexandria, Washington DC, USA, 13–15May 2008, pp 550–557
Teunissen PJG (1996) GPS carrier phase ambiguity fixing concepts.In: Kleusberg A and Teunissen P (eds) GPS for Geodesy. Verlag,Berlin, pp 263–336
Van Dierendonck AJ, Klobuchar J, Hua Q (1993) Ionospheric scintil-lation monitoring using commercial single frequency C/A codereceivers. In: Proceedings ION GPS-93: sixth international tech-nical meeting of the satellite division of the Institute of Navigation,Salt Lake City, Utah, pp 1333–1342
Van Dierendonck AJ (2001) Measuring ionospheric scintillation effectsfrom GPS signals. In: Proceedings of 57th annual meeting of theInstitute of Navigation, Albuquerque, New Mexico, USA, pp 391–396
123



















