
Galileo Tracking Performance Under Ionosphere Scintillation
9
GALILEO TRACKING PERFORMANCE UNDER IONOSPHERE SCINTILLATION Nazelie Kassabian (1) , Yu Morton (2) (1) Department of Electronics and Telecommunications, Politecnico di Torino, Corso Duca degli Abruzzi 24 10129 Torino, Italy, Email: [email protected] (2) Department of Electrical and Computer Engineering, Miami University, Oxford, OH 45056 USA, Email: [email protected] ABSTRACT The objective of this paper is to investigate the ionosphere scintillation impact on the Galileo E1 and E5 open service (OS) BOC signals through the comparison of carrier to noise ratio, amplitude and phase scintillation indices. These indices are obtained by processing correlator and phase measurement outputs of a customized Galileo software receiver in Matlab on one side, and a Septentrio PolaRxS PRO receiver on the other. The collection of global navigation satellite systems (GNSS) data is performed in an equatorial region in Ascension Islands where scintillation is known to be a common event. Code acquisition and tracking routines are specially tailored to take into account each frequency band’s signal structure, including chip rate, primary/secondary code, and dedicated subcarrier. Considering the pilot channel where no data message is encoded, the phase lock loop (PLL) uses a coherent extended arctangent discriminator to accept a wider carrier phase error. The choice of all these three strategies is motivated by the desire to maintain receiver carrier and code phase lock in challenging scintillation conditions. On the Galileo E1 OS frequency band, the locally generated code used as a reference to perform tracking, is comprised of the spreading code multiplied by a special subcarrier, the composite binary offset carrier CBOC(6,1,1/11). Due to the shape of the autocorrelation function of binary offset carrier (BOC) signals in general, ambiguous tracking is a common threat. For that reason, an unambiguous code phase detector is inserted in the delay locked loop (DLL) and a modified version of the two-step CBOC tracking [1] is implemented. E5a and E5b signals are treated like binary phase shift keying (BPSK) signals when separate frequency bands are considered, and so typical BPSK DLL tracking is applied. To harness the superior tracking capability offered by BOC subcarriers, a wideband front-end is needed inside a Galileo receiver to capture the entire tracking capability of Galileo signals. It is expected that Galileo wideband signals exhibit superior tracking permeability during scintillation events. 1. INTRODUCTION As more and more awareness is gained in space weather and ionosphere disturbances impact on our Earth’s technical infrastructure, more interest is shed on studying the underlying physical phenomena related to the Sun’s activity and consequently ionosphere scintillation. In that respect, there are many goals to be achieved on the ground, mainly to curb the potentially damaging effects of technical equipment such as electric grids or even avoid outages of global navigation satellite systems (GNSS) which the economy and world order is increasingly dependent upon. Moreover, as more and more GNSS are emerging, such as Galileo, GLONASS and Beidou, the possibility of exploiting the availability of a big number of satellites for the end of a global ionosphere scintillation monitoring system is becoming more realistic and very much appealing. Radio frequency (RF) signals undergo amplitude/phase/ frequency scintillation as they pass through the ionosphere region as a result of solar winds erupted from the Sun characterized by turbulent ionized gases called plasma [2]. These ionized gases are dispersive, meaning that they have a different impact on different frequencies. Radio signals at the lower frequencies suffer more from the plasma irregularities. GNSS receivers is offering an effective tool to monitor the state of these irregularities in the sky as by recovering signals transmitted on different frequency bands from one or more of its spacecrafts. This can be achieved by monitoring the power of the recovered signal after performing carrier/code tracking and examining the resulting detrended carrier phase fluctuations. The objective of this paper is to develop tracking algorithms applicable to Galileo signals experiencing ionospheric scintillation and to evaluate the algorithms performance using both simulation and real scintillation data. The remaining paper is organized as the following. Section 2 describes the current Galileo OS signal structure. Section 3 presents simulated Galileo signal generation process. Galileo code and carrier tracking algorithms are discussed in Section 4. Section 5 applies the tracking algorithms to real Galileo scintillation data collected at Ascension Island and compares the algorithm performance with a commercial receiver outputs. Section 6 summarizes the work. 2. GALILEO OS SIGNAL STRUCTURE The Galileo OS signals are open source free of charge signals to provide competitive position and timing performance for the user community. The Galileo OS
Transcript of Galileo Tracking Performance Under Ionosphere Scintillation

GALILEO TRACKING PERFORMANCE UNDER IONOSPHERE SCINTILLATION Nazelie Kassabian
(1), Yu Morton
(2)
(1) Department of Electronics and Telecommunications, Politecnico di Torino, Corso Duca degli Abruzzi 24
10129 Torino, Italy, Email: [email protected] (2)
Department of Electrical and Computer Engineering, Miami University, Oxford, OH 45056 USA, Email:
ABSTRACT
The objective of this paper is to investigate the
ionosphere scintillation impact on the Galileo E1 and E5
open service (OS) BOC signals through the comparison
of carrier to noise ratio, amplitude and phase
scintillation indices. These indices are obtained by
processing correlator and phase measurement outputs of
a customized Galileo software receiver in Matlab on one
side, and a Septentrio PolaRxS PRO receiver on the
other. The collection of global navigation satellite
systems (GNSS) data is performed in an equatorial
region in Ascension Islands where scintillation is known
to be a common event. Code acquisition and tracking
routines are specially tailored to take into account each
frequency band’s signal structure, including chip rate,
primary/secondary code, and dedicated subcarrier.
Considering the pilot channel where no data message is
encoded, the phase lock loop (PLL) uses a coherent
extended arctangent discriminator to accept a wider
carrier phase error. The choice of all these three
strategies is motivated by the desire to maintain receiver
carrier and code phase lock in challenging scintillation
conditions. On the Galileo E1 OS frequency band, the
locally generated code used as a reference to perform
tracking, is comprised of the spreading code multiplied
by a special subcarrier, the composite binary offset
carrier CBOC(6,1,1/11). Due to the shape of the
autocorrelation function of binary offset carrier (BOC)
signals in general, ambiguous tracking is a common
threat. For that reason, an unambiguous code phase
detector is inserted in the delay locked loop (DLL) and a
modified version of the two-step CBOC tracking [1] is
implemented. E5a and E5b signals are treated like
binary phase shift keying (BPSK) signals when separate
frequency bands are considered, and so typical BPSK
DLL tracking is applied. To harness the superior
tracking capability offered by BOC subcarriers, a
wideband front-end is needed inside a Galileo receiver
to capture the entire tracking capability of Galileo
signals. It is expected that Galileo wideband signals
exhibit superior tracking permeability during
scintillation events.
1. INTRODUCTION
As more and more awareness is gained in space weather
and ionosphere disturbances impact on our Earth’s
technical infrastructure, more interest is shed on
studying the underlying physical phenomena related to
the Sun’s activity and consequently ionosphere
scintillation. In that respect, there are many goals to be
achieved on the ground, mainly to curb the potentially
damaging effects of technical equipment such as electric
grids or even avoid outages of global navigation satellite
systems (GNSS) which the economy and world order is
increasingly dependent upon. Moreover, as more and
more GNSS are emerging, such as Galileo, GLONASS
and Beidou, the possibility of exploiting the availability
of a big number of satellites for the end of a global
ionosphere scintillation monitoring system is becoming
more realistic and very much appealing. Radio
frequency (RF) signals undergo amplitude/phase/
frequency scintillation as they pass through the
ionosphere region as a result of solar winds erupted
from the Sun characterized by turbulent ionized gases
called plasma [2]. These ionized gases are dispersive,
meaning that they have a different impact on different
frequencies. Radio signals at the lower frequencies
suffer more from the plasma irregularities. GNSS
receivers is offering an effective tool to monitor the
state of these irregularities in the sky as by recovering
signals transmitted on different frequency bands from
one or more of its spacecrafts. This can be achieved by
monitoring the power of the recovered signal after
performing carrier/code tracking and examining the
resulting detrended carrier phase fluctuations. The
objective of this paper is to develop tracking algorithms
applicable to Galileo signals experiencing ionospheric
scintillation and to evaluate the algorithms performance
using both simulation and real scintillation data.
The remaining paper is organized as the following.
Section 2 describes the current Galileo OS signal
structure. Section 3 presents simulated Galileo signal
generation process. Galileo code and carrier tracking
algorithms are discussed in Section 4. Section 5 applies
the tracking algorithms to real Galileo scintillation data
collected at Ascension Island and compares the
algorithm performance with a commercial receiver
outputs. Section 6 summarizes the work.
2. GALILEO OS SIGNAL STRUCTURE
The Galileo OS signals are open source free of charge
signals to provide competitive position and timing
performance for the user community. The Galileo OS
mainly consists of three frequency bands, E1, E5a/b,
and E6, although the latter will be omitted in this paper
because it is not fully specified in the Galileo OS
interface control document (ICD) [3]. The transmitted
power on both of these frequency bands is divided onto
two channels, the data and pilot channels. Due to plans
to extend the integration time to more than one code
period, only one of these channels is considered in this
paper, the pilot channel.
2.1. Galileo E1 OS Signal
The Galileo E1 frequency band is found in the upper L-
Band and is centered around 1575.42 MHz, the same
center frequency as that of the GPS L1 frequency band.
It is modulated by a ranging code as well as a weighted
sum of two subcarrier signals (higher weight to the
lower rate subcarrier) which together make up the
composite binary offset carrier (CBOC) modulation
CBOC(6,1,1/11) in the time domain. In the frequency
domain, it is known as the modified binary offset carrier
MBOC(6,1,1/11) and its power spectral density (PSD)
is expressed as:
)(611
1)(
111
10)( fGfGf
sG (1)
where G1(f) and G6(f) are the PSD of the binary offset
carrier BOC(1,1) and BOC(6,1) signals. This is the total
PSD of the Galileo E1 in-phase channel. In fact, the E1
signal allocates data/pilot channels on the same in-phase
I channel while the quadra-phase Q channel is reserved
for the public regulated service (PRS) which has a wider
frequency bandwidth. The Galileo OS E1 reference
bandwidth is specified to be β = 24.552 MHz as
compared to the GPS L1 and the E5a/b reference
bandwidths of 20.46 MHz. In fact, a theoretical two-
sided bandwidth that accommodates both BOC(1,1) and
BOC(6,1) signals can be assessed to be equal to
2*(6*1.023 + 1.023) = 14.322 MHz. It can be concluded
that such a bandwidth covers a large percentage of the
total signal power spectrum after looking at the power
loss or even correlation loss [4] defined as:
(2)
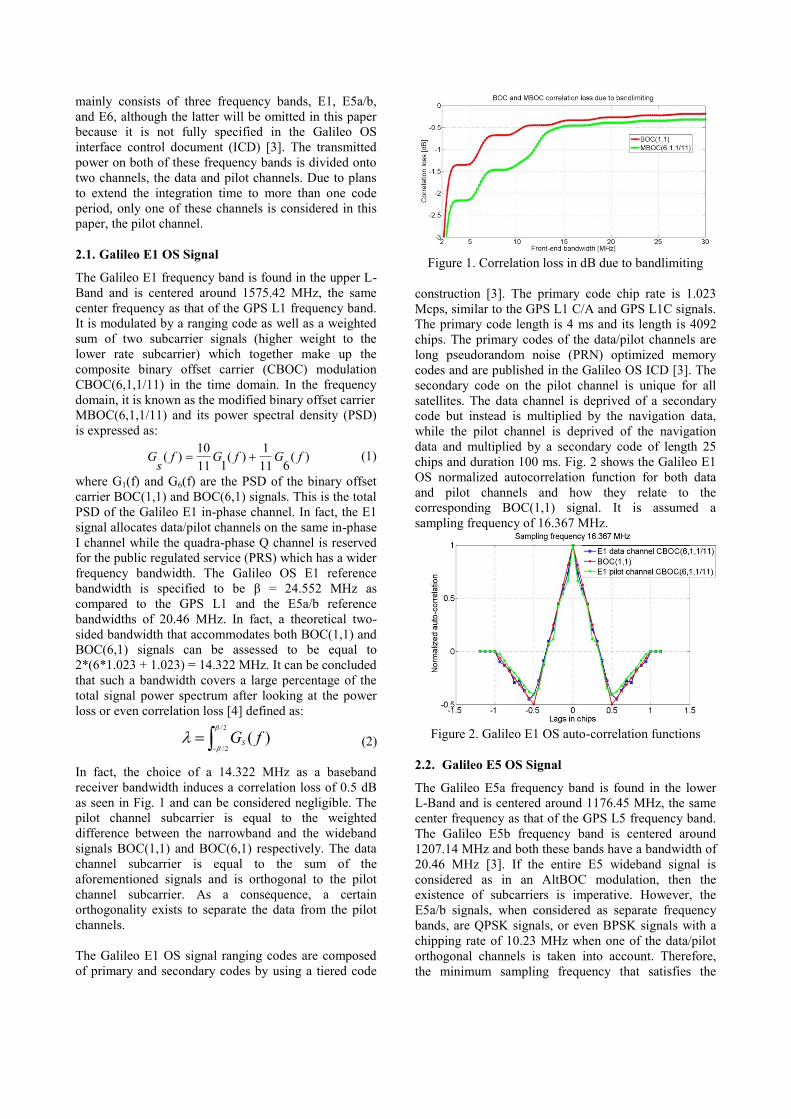
In fact, the choice of a 14.322 MHz as a baseband
receiver bandwidth induces a correlation loss of 0.5 dB
as seen in Fig. 1 and can be considered negligible. The
pilot channel subcarrier is equal to the weighted
difference between the narrowband and the wideband
signals BOC(1,1) and BOC(6,1) respectively. The data
channel subcarrier is equal to the sum of the
aforementioned signals and is orthogonal to the pilot
channel subcarrier. As a consequence, a certain
orthogonality exists to separate the data from the pilot
channels.
The Galileo E1 OS signal ranging codes are composed
of primary and secondary codes by using a tiered code
Figure 1. Correlation loss in dB due to bandlimiting
construction [3]. The primary code chip rate is 1.023
Mcps, similar to the GPS L1 C/A and GPS L1C signals.
The primary code length is 4 ms and its length is 4092
chips. The primary codes of the data/pilot channels are
long pseudorandom noise (PRN) optimized memory
codes and are published in the Galileo OS ICD [3]. The
secondary code on the pilot channel is unique for all
satellites. The data channel is deprived of a secondary
code but instead is multiplied by the navigation data,
while the pilot channel is deprived of the navigation
data and multiplied by a secondary code of length 25
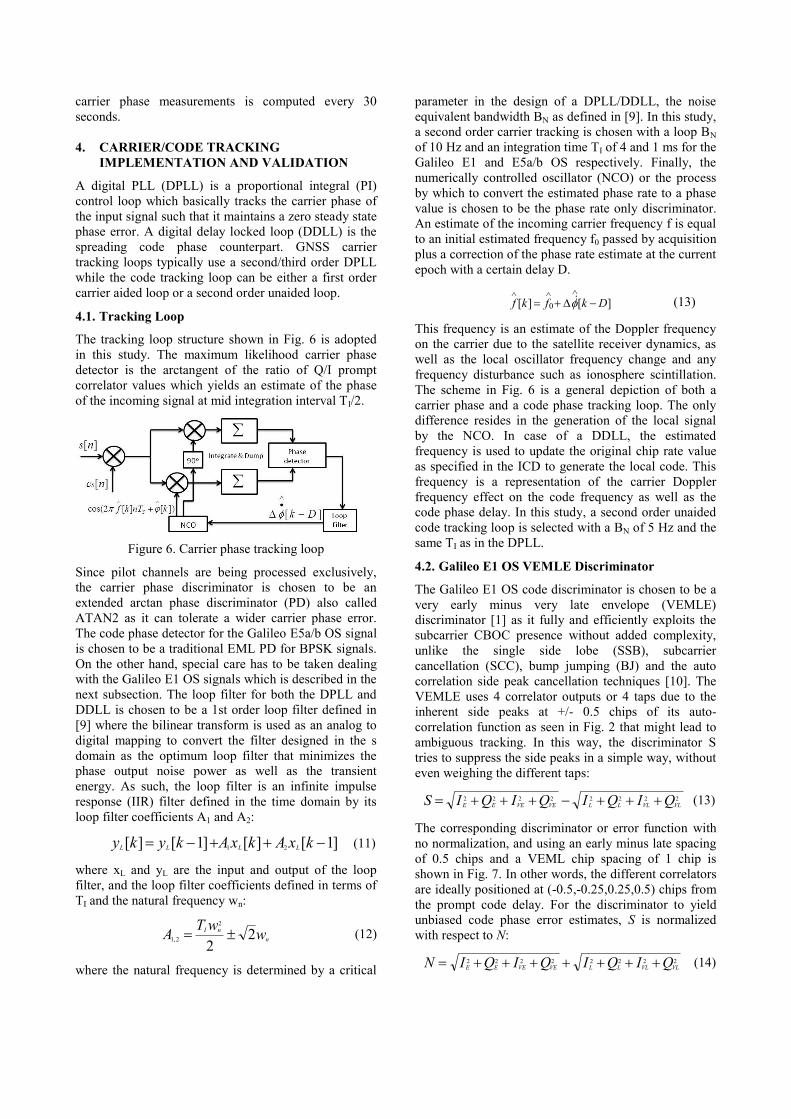
chips and duration 100 ms. Fig. 2 shows the Galileo E1
OS normalized autocorrelation function for both data
and pilot channels and how they relate to the
corresponding BOC(1,1) signal. It is assumed a
sampling frequency of 16.367 MHz.
Figure 2. Galileo E1 OS auto-correlation functions
2.2. Galileo E5 OS Signal
The Galileo E5a frequency band is found in the lower
L-Band and is centered around 1176.45 MHz, the same
center frequency as that of the GPS L5 frequency band.
The Galileo E5b frequency band is centered around
1207.14 MHz and both these bands have a bandwidth of
20.46 MHz [3]. If the entire E5 wideband signal is
considered as in an AltBOC modulation, then the
existence of subcarriers is imperative. However, the
E5a/b signals, when considered as separate frequency
bands, are QPSK signals, or even BPSK signals with a
chipping rate of 10.23 MHz when one of the data/pilot
orthogonal channels is taken into account. Therefore,
the minimum sampling frequency that satisfies the
2/
2/
)(
fGS

Nyquist sampling theorem at baseband is 20.46 MHz.
Moreover, unlike the Galileo E1 OS channels, the E5a/b
data/pilot channels are characterized by orthogonality.
Both of these channels primary PRN codes can be
generated using linear feedback shift registers and last
1ms while the secondary codes are published in
hexadecimal format in [3]. The data channel offers a
unique secondary code for all satellites (20 ms for E5a
data channel and 4 ms for E5b data channel) while a
different secondary code of 100 ms is used for every
satellite on the pilot channel. The auto-correlation
function of the E5a/b Galileo signals shown in Fig. 3 is
the typical BPSK auto-correlation function (similar to
that of GPS L1 C/A code) where a single peak is present
at zero phase lag.
Figure 3. Galileo E5a OS auto-correlation functions
3. SIGNAL/IONOSPHERE SCINTILLATION
SIMULATION AND ESTIMATION
The received or reference signal s[m] at the input of a
GNSS receiver can be generically expressed as:
][])[2cos(][][2][ mnmS
mTc
fmcmdPms (3)
where P is the total received signal power, d[m] is a
binary data sequence holding the navigation message,
c[m] is the spreading code (which includes the
subcarrier code sc[m] in BOC modulated signals), fc is
the carrier frequency, TS is the analog to digital
sampling interval, φ[m] is the instantaneous carrier
phase and n[m] is a noise term which represents thermal
noise and is assumed to be white with a single sided
PSD of N0 Watts/Hz.
3.1. Galileo Signal Simulation
Galileo E1 and E5a/b OS signal (data and pilot
channels) simulation routine is developed to be used in
this paper, where a set of parameters can be specified to
generate the desired simulated signals. These
parameters include the frequency band to be generated,
the intermediate frequency fIF, the sampling frequency
fS, the Doppler frequency fD, the Doppler rate aD, the
PRN or space vehicle (SV) number, the spreading code
phase or code delay τ, the carrier to noise ratio (CNR)
C/N0, the time duration over which the signal is to be
simulated TD. There is also the option to exclude any of
the code, carrier and noise signals giving the
opportunity to test and analyze the mechanisms at the
heart of carrier phase and code delay tracking. Given the
aforementioned two-sided reference bandwidth values
of 24.552 and 20.46 MHz of the Galileo E1 and E5a/b
OS signals, the intermediate frequency should be
carefully chosen so as to be greater than the single sided
reference bandwidth values 12.276 MHz and 10.23
MHz respectively so as to avoid aliasing with the
negative side of the spectrum. The sampling frequency
should then be chosen so as to satisfy the Nyquist
sampling theorem (twice the bandwidth). The
methodology followed in generating the simulated
signals is a structured approach where modular
functions perform unique duties: the baseband code is
produced in terms of chips over the period of a
secondary code which is 100 ms for both E1 and E5a/b
pilot channels; the data channel is generated by
repeating the primary code until the same length is
reached. Basically, this step involves the multiplication
of the primary and secondary codes following a tiered
code structure. A non-return-to-zero (NRZ) signal is
generated by mapping the logical binary values 0 and 1
to +1 and -1 respectively. The next step for the E1 OS
signal is to multiply each chip by the 12 sub-chips of the
corresponding CBOC. The E5a/b signals skip this step
because there is no subcarrier. After that step, it is
necessary to shift the code by the complement of the
desired code phase, and then to sample with the desired
fS taking into account the desired Doppler frequency
and rate. The reason for introducing the code phase shift
in terms of chips rather than samples and hence the
process of shifting before sampling, is because with a
nonzero Doppler frequency, the effective code phase in
samples changes at every block of signal simulation, i.e.
100 ms in our case. Finally the data message is
generated using the random function and with the
specified data rate in the ICD [3]. The last stage is to
simulate the front end and the Doppler frequency on the
carrier, and this is done by multiplying the baseband
signal by the cosine and sine of the appropriate
frequency (the I and Q channels) as in Eq. 3, that is
setting the frequency as:
(4)
In this paper, real GNSS baseband signals are available
at the input of the GNSS receiver at hand, therefore the
intermediate frequency is set to 0 Hz in the rest of the
paper, and the sampling frequency is chosen to be 25
Msamples/s. A sample noiseless Galileo E1 OS signal is
Figure 4. Noiseless Galileo E1 and E5a OS PSD
SmT
Da
Df
IFf
cf

generated setting the input parameters to some arbitrary
values, i.e. fD = 2 KHz, aD = -0.2 Hz/s, a code delay of
20560 chips (5 secondary chips and 100 primary chips),
and a time duration TD = 2 seconds. Since there is no
noise in this signal, it is possible to verify the shape of
the MBOC(6,1,1/11) signal spectrum as shown in Fig.
4. A similar signal is generated to verify the E5a PSD as
shown in Fig. 5.
3.2. Ionosphere Scintillation Simulation
The ionosphere scintillation is simulated in addition to
the Galileo OS signal, taking into account the impact
over the amplitude and phase of the original Galileo
signal. The ionosphere scintillation model described in
[5] is used to simulate ionosphere scintillation where
two inputs, the standard scintillation amplitude index S4
and the channel decorrelation time τ0, determine the
amplitude and phase disturbance over the ultra high
frequency (UHF) L-band signals. These two parameter
inputs indicate the severity and speed of the scintillation
in terms of amplitude and phase fluctuations. A possible
improvement to this model would be to control the
speed of the fluctuations in the amplitude and phase
time history separately. The model in [5] is used in this
paper and is deemed realistic as it draws on an extensive
set of equatorial scintillation data to approximate the
signal propagation channel, namely by estimating both
the scintillation amplitude distribution as well as the
spectrum of the complex scintillation signal. A
relatively medium scintillation characterized by a large
S4 index value and a low τ0 value is simulated and
shown in Fig. 6 where S4 and τ0 are set to 0.6 and 0.8
seconds respectively.
Figure 5. Simulated scintillation signal amplitude and
phase to be multiplied and added respectively to the raw
Galileo simulated signal.
3.3. Ionosphere Scintillation Indices
During GNSS signal tracking, I and Q prompt correlator
outputs are logged as indicators of how much power is
recovered from the received signal. In fact, the CNR
and the S4 index computations are based on the signal
intensity SI which is equal to the difference of
narrowband and wideband power [6]:
2
22
4
IS
IS
IS
S (5)
where <.> is the expected value. In fact, S4 is a
normalized standard deviation of signal intensity and is
normally computed on 60 second intervals. Narrowband
and wideband power values are computed every 20 ms
using multiple I and Q correlator values, i.e. M=5 for
Galileo E1 OS and 20 for Galileo E5a/b:
2
1
2
1
M
ii
QM
ii
INBP (6)
M
ii
Qi
IWBP
1
22 (7)
This is due to the different accumulation intervals used
on the two frequency bands respectively which is
determined by their code periods, i.e. 4 ms for Galileo
E1 OS and 1 ms for Galileo E5a/b. However, this does
not prevent a fair comparison between the two signals
as it has been proved in [7] that using the normalization
in the S4 computation, removes any dependence of S4
on the accumulation interval TI. Finally, the need for
detrending arises due to the dependence of the signal
intensity measurements on the satellite receiver
dynamics (D), the receiver oscillator phase error (O),
the ionosphere (I) and troposphere (T) errors,
collectively known as DOIT terms. For that end, a 6th
order Butterworth low pass filter is used with a cutoff
frequency of 0.05 Hz instead of the traditional 0.1 Hz
[7]. The detrended signal intensity is obtained by
dividing the raw signal intensity by the low pass filter
output adjusted by the filter group delay:
LPFWBPNBP
WBPNBP
IS
)(
(8)
Moreover, the S4 due to ambient noise has to be
removed from the squared value of the S4 index:
oNC
oNC
oN
S/19
5001
/
100
4
(9)
where C/N0 can be estimated using the I and Q
correlator outputs following the power ratio method [8].
On the other hand, the traditional phase scintillation
index σφ is the standard deviation of the accumulated
Doppler range (ADR) which is the accumulation of the
estimated phase by the phase locked loop (PLL) during
the integration interval and the carrier discriminator
phase error σE:
])[][ˆ2( kTkfstdk
EID
(10)
However, before computing the standard deviation, the
carrier phase measurements as the signal intensity
measurements, should be detrended as well to ward off
DOIT trends. The detrending is applied at post-
processing through a 6th
order Butterworth high pass
filter with a cutoff frequency of 0.05 Hz [7].
Consequently, the standard deviation of the detrended
carrier phase measurements is computed every 30
seconds.
4. CARRIER/CODE TRACKING
IMPLEMENTATION AND VALIDATION
A digital PLL (DPLL) is a proportional integral (PI)
control loop which basically tracks the carrier phase of
the input signal such that it maintains a zero steady state
phase error. A digital delay locked loop (DDLL) is the
spreading code phase counterpart. GNSS carrier
tracking loops typically use a second/third order DPLL
while the code tracking loop can be either a first order
carrier aided loop or a second order unaided loop.
4.1. Tracking Loop
The tracking loop structure shown in Fig. 6 is adopted
in this study. The maximum likelihood carrier phase
detector is the arctangent of the ratio of Q/I prompt
correlator values which yields an estimate of the phase
of the incoming signal at mid integration interval TI/2.
Figure 6. Carrier phase tracking loop
Since pilot channels are being processed exclusively,
the carrier phase discriminator is chosen to be an
extended arctan phase discriminator (PD) also called
ATAN2 as it can tolerate a wider carrier phase error.
The code phase detector for the Galileo E5a/b OS signal
is chosen to be a traditional EML PD for BPSK signals.
On the other hand, special care has to be taken dealing
with the Galileo E1 OS signals which is described in the
next subsection. The loop filter for both the DPLL and
DDLL is chosen to be a 1st order loop filter defined in
[9] where the bilinear transform is used as an analog to
digital mapping to convert the filter designed in the s
domain as the optimum loop filter that minimizes the
phase output noise power as well as the transient
energy. As such, the loop filter is an infinite impulse
response (IIR) filter defined in the time domain by its
loop filter coefficients A1 and A2:
]1[][]1[][ 21 kxAkxAkyky LLLL (11)
where xL and yL are the input and output of the loop
filter, and the loop filter coefficients defined in terms of
TI and the natural frequency wn:
n
nIw
wTA 2
2
2
2,1 (12)
where the natural frequency is determined by a critical
parameter in the design of a DPLL/DDLL, the noise
equivalent bandwidth BN as defined in [9]. In this study,
a second order carrier tracking is chosen with a loop BN
of 10 Hz and an integration time TI of 4 and 1 ms for the
Galileo E1 and E5a/b OS respectively. Finally, the
numerically controlled oscillator (NCO) or the process
by which to convert the estimated phase rate to a phase
value is chosen to be the phase rate only discriminator.
An estimate of the incoming carrier frequency f is equal
to an initial estimated frequency f0 passed by acquisition
plus a correction of the phase rate estimate at the current
epoch with a certain delay D.
][][ 0 Dkfkf
(13)
This frequency is an estimate of the Doppler frequency
on the carrier due to the satellite receiver dynamics, as
well as the local oscillator frequency change and any
frequency disturbance such as ionosphere scintillation.
The scheme in Fig. 6 is a general depiction of both a
carrier phase and a code phase tracking loop. The only
difference resides in the generation of the local signal
by the NCO. In case of a DDLL, the estimated
frequency is used to update the original chip rate value
as specified in the ICD to generate the local code. This
frequency is a representation of the carrier Doppler
frequency effect on the code frequency as well as the
code phase delay. In this study, a second order unaided
code tracking loop is selected with a BN of 5 Hz and the
same TI as in the DPLL.
4.2. Galileo E1 OS VEMLE Discriminator
The Galileo E1 OS code discriminator is chosen to be a
very early minus very late envelope (VEMLE)
discriminator [1] as it fully and efficiently exploits the
subcarrier CBOC presence without added complexity,
unlike the single side lobe (SSB), subcarrier
cancellation (SCC), bump jumping (BJ) and the auto
correlation side peak cancellation techniques [10]. The
VEMLE uses 4 correlator outputs or 4 taps due to the
inherent side peaks at +/- 0.5 chips of its auto-
correlation function as seen in Fig. 2 that might lead to
ambiguous tracking. In this way, the discriminator S
tries to suppress the side peaks in a simple way, without
even weighing the different taps:
22222222VLVLLLVEVEEE QIQIQIQIS (13)
The corresponding discriminator or error function with
no normalization, and using an early minus late spacing
of 0.5 chips and a VEML chip spacing of 1 chip is
shown in Fig. 7. In other words, the different correlators
are ideally positioned at (-0.5,-0.25,0.25,0.5) chips from
the prompt code delay. For the discriminator to yield
unbiased code phase error estimates, S is normalized
with respect to N:
22222222VLVLLLVEVEEE QIQIQIQIN (14)

In addition, a normalization factor is needed such that
the piece-wise linear discriminator function has a unity
slope for a specific piece in consideration. In fact, the
idea of coarse and fine tracking as mentioned in [1]
stems from the fact that the discriminator function can
be approximated by a collection of several piece-wise
linear functions which have different slopes. This is due
to the CBOC(6,1,1/11) auto-correlation shape as shown
in Fig. 2. Due to this CBOC shape, namely the quasi
zero slope of the auto-correlation function main peak
around +/- 0.1 chips, there is an inherent risk of
confining to sub-optimal code tracking, incurring a
position error of the order of 150 meters. For this
reason, coarse and fine tracking need to be carried out
successively. Coarse tracking is initiated and a test is
performed to assess the feasibility of moving to fine
tracking. In other words, this means monitoring the
range of estimated code delay error values at the
VEMLE discriminator output and raising a flag when
these errors are small enough in a statistical sense. A
simple arbitrary monitoring test consists of looking back
over the last second of tracking, and moving to fine
tracking if 90% of the code delay values are less than
half of the fine tracking linear region, which is half of
an early minus late chipping space value, i.e. 0.25/2 =
0.125 chips. On the other hand, another condition has to
be satisfied to remain in the fine tracking stage once
there, that is 50% of the code delay error values in the
last 100 ms are required to be less than 0.125 chips. In
the design of the coarse/fine tracking, the normalization
factors are selected according to the slope of the code
auto-correlation function main peak as well as the early
minus late chip spacing. Analytical expressions of these
normalization factors can be found in [1] where an
additional multiplicative factor of 2 is used for coarse
tracking, and 1/1.2 for fine tracking. Figure 7 shows all
three versions, without normalization, with
normalization for coarse and fine tracking. It can be
seen that coarse tracking ensures a wide linear range
between +/- 0.5 chips and partially between +/- 1 chip.
In the same figure, it can be seen that fine tracking, on
the other hand, ensures a narrow linear range but
specifically concentrated around zero code delay error.
This yields fine or accurate estimates of the code phase
error.
Figure 7. VEMLE discriminator with different
normalization options
4.3. Tracking of Simulated Signals
A sample Galileo E1 signal is simulated setting the
input parameters to some arbitrary values, i.e. fD = 2
KHz, aD = -0.2 Hz/s, a code delay of 20560 chips (5
secondary chips and 100 primary chips), a CNR of 45
dB-Hz over a time duration TD = 2 seconds. Applying
the tracking scheme described in the previous section
yields the results shown in Fig. 8, where the true and
estimated carrier frequency are shown during each
integration interval as well as the total phase error
where the steady state 95 percentile yields +/- 1.25
degrees. In addition, the DDLL converse is shown
where the estimated code frequency error 95 percentile
lies between +/- 1 degree. On the other hand, the code
phase steady state error 95 percentile lies between +/-
0.1 samples. It is worth noting that the higher jitter in
code phase/frequency estimation error at the beginning
is due to the early coarse tracking algorithm and the
transition to fine tracking results in a much lower
tracking jitter. A similar tracking test with E5a/b signals
is performed where carrier/code frequency and phase
errors are shown in Fig. 9.
Figure 8. Tracking output of simulated E1 signal
Figure 9. Tracking output of simulated E5a signal

4.4. Tracking of Simulated Ionosphere Scintillation
In order to assess ionosphere scintillation tracking,
similar Galileo E1 and E5a OS signals are generated
where the scintillation amplitude and phase time history
is incorporated in the original signal as described in
Section 3.2. The S4 index is chosen to be 0.8 and the
channel decorrelation time τ0 to be 0.8. Moreover, the
scintillation indices are derived using the tracking
outputs, mainly the correlation values and the ADR as
described in Section 3.3. Fig. 10 shows that a good
estimate of the S4 index is reached at every minute for
both frequency bands, in the range of 0.55-0.7
compared to an accurate estimate of 0.8 which is not
possible because of the statistical nature of the input
signal due to both noise and scintillation history, and
due to the impact of the tracking loop itself [11]. The S4
estimate discrepancy between the E1 and E5a frequency
bands ranges between 0.02 and 0.1. On the other hand, a
τ0 value of 0.8 results in a σφ estimate in the range of 0.4
to 1 radians. The theoretical σφ range between 0.4 and
0.7 radians is computed using the standard deviation of
the scintillation phase time history for every 30 seconds
and a good estimate is evaluated on both frequency
bands (almost the same) with an error in the range of 0-
0.5 rad. The first two minutes σφ outputs are discarded
due to the ADR detrending filter transient.
Figure 10. Estimated scintillation indices of a simulated
scintillation signal with an S4 intensity of 0.8 and a τ0
value of 0.8 on top of raw Galileo E1 and E5a signals
5. TRACKING OF REAL IONOSPHERE
SCINTILLATION IN GALILEO SIGNALS
Experimental GNSS data has been collected on the 7th
to 10th
of March 2013 at Ascension Island which is
located in the Equator at a longitude of 14.4o W and
latitude of 7.9o S. The data collection has been
performed using flexible and reconfigurable universal
software radio peripheral (USRP) devices, the USRP
N210 acting as an RF front-end. A common antenna,
the Novatel GPS-703-GGG wideband antenna is shared
among five different USRPs acting on different
frequency bands to collect GPS, Galileo E1 and E5,
GLONASS, and Beidou data. In fact, an 8 way splitter
delivers the same data to five USRP N210 and a
Septentrio PolaRxS which houses an oven controlled
crystal oscillator (OCXO) characterized by low noise on
the phase measurements. The OCXO timing signal is
distributed to the various USRPs through an 8 way
passive splitter. The USRP N210 sampling frequency is
set to 25 Msamples/s and delivers a complex signal such
that the effective sampling frequency is 50 Msamples/s.
The Septentrio tracking outputs (I/Q correlator values
and ADR) are saved and used to generate the S4 and σφ
indices as well as the CNR values for a later comparison
with those obtained using the tracking outputs of a
customized receiver as described in this paper.
It is shown in Fig. 11-12-13 that the comparison
between these outputs is fairly satisfying considering
the same SV with PRN 19 and processing different
frequency bands Galileo E1 and E5a. Fig. 11 shows that
the amplitude scintillation is stronger on the E5a band;
similarly Fig. 12 shows that the phase scintillation is
stronger on the E5a band, and Fig. 13 underlines the
possibility of losing lock after going to very low CNR
values.
Figure 11. Filtered S4 estimates on PRN 19 using
Galileo E1 (left) and E5a (right) frequency bands.
Figure 12. Filtered σφ estimates on PRN 19 using
Galileo E1 (left) and E5a (right) frequency bands.
Figure 13. Carrier to noise ratio estimate on PRN 19
using Galileo E1 (left) and E5a (right) frequency bands.
Similar plots can be obtained for SV with PRN 20,
where the scintillation is found to be of significantly
lower intensity. In fact, this can be seen in Fig. 14 where
a proportional relationship is found between the
scintillation indices S4 and σφ on two frequency bands,
the E1 and E5a bands and for different visible satellites.
It is worth mentioning that during the data collection,
SV 19 was following a path going from west to east
with an elevation in the range of 30-40 degrees.

Similarly SV 20 was following a path going from west
to east, passing almost through the same point in space
as SV 19 with a delay of 2.5 hours, but from then on
with a steadily decreasing elevation angle from 50 to 15
degrees. These are the key situations where the
scintillation phenomenon can be studied with a time
resolution determined by the GNSS satellites path.
Unfortunately, the Galileo SV with PRN 11 became
visible during only a short period of time, with an
elevation angle less than 15 degrees, and so had to be
neglected. Finally Galileo SV with PRN 12 had an
interesting path starting from an invisible state to an
increasing elevation from the horizon to a maximum of
40 degrees always in the west part of the sky and even
passing almost through the same point in space as SV
19 with a delay of 2 hours. It can be thus concluded that
in the same region of space the scintillation intensity
becomes considerably higher further later in time, after
comparing the performance of PRN 19 vs PRN 12 as
can be seen in Fig. 14.
Figure 14. Comparison of estimated scintillation indices
on two Galileo frequency bands and three Galileo
satellites.
6. CONCLUSION
Space weather effects, mainly amplitude and phase
scintillation on recently collected UHF Galileo OS
signals have been shown in this paper as these signals
passed through the ionosphere and reached Ascension
Island, an equatorial region. It has been seen that the
recently launched four Galileo satellites add further
observability to the existent block of GNSS satellites in
view of a better time resolution in ionosphere
scintillation monitoring. Exploiting the full wide-
bandwidth offered by the E1 and E5a Galileo signals,
carrier/code tracking has been tested on simulated
signals with and without amplitude/phase scintillation
and performed on real Galileo signals as well. A new
method for Galileo CBOC code tracking has been
proposed. Scintillation indices on three Galileo visible
satellites during data collection have been computed and
compared to the indices generated by the tracking
outputs of a professional Septentrio PolaRxS PRO
scintillation receiver. Finally, the empirical relationships
of the scintillation indices between different frequency
bands have been verified with real Galileo signals on
the E1 and E5a bands.
ACKNOWLEDGMENT
The authors wish to acknowledge funding support from
MIUR the Italian Ministry of Education, University and
Research and US Air Force Research Laboratory
(#FA8650-08-D-1451). The authors also want to thank
Dr. Todd Pedersen and his colleagues from AFRL
Kirkland AFB who supported the Ascension Island data
collection experiment, and Steve Taylor, a graduate
student at Miami University for helping with data
extraction for this project.
REFERENCES
1. A. Jovanovic, C. Mongrédien, Y. Tawk, C. Botteron,
and P. A. Farine (2012). Two-Step Galileo E1
CBOC Tracking Algorithm: When Reliability and
Robustness Are Keys! International Journal of
Navigation and Observation, vol. 2012, Article ID
135401, 14 pages. doi:10.1155/2012/135401
2. C. M. Ho, M. K. Sue, A. Bedrossian, and R. W.
Sniffin (2002). Scintillation Effects on Radio
Wave Propagation Through Solar Corona. Proc.
27th URSZ General Meeting, Maastricht,
Netherlands.
3. European GNSS (Galileo) Open Service Signal In
Space Interface Control Document (SIS ICD)
(2010), Technical report, Brussels.
4. J. W. Betz (2000). Design and Performance of Code
Tracking for the GPS M Code Signal. Proc. 13th
International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GPS
2000), pages 2140-2150, Salt Palace Convention
Center, Salt Lake City, UT.
5. Humphreys, T.E., M.L. Psiaki, J.C. Hinks, B.W.
O’Hanlon and P.M. Kintner, Jr. (2009). Simulating
Ionosphere-Induced Scintillation for Testing GPS
Receiver Phase Tracking Loops. IEEE Journal of
Selected Topics in Signal Processing, Vol. 3, No.
4.
6. Van Dierendonck, A. J., Klobuchar, J., and Hua, Q.
(1993). Ionospheric Scintillation Monitoring Using
Commercial Single Frequency C/A Code
Receivers. Proceedings of ION GPS-93, Salt Lake
City, UT, pp. 1333 – 1342.
7. Niu, F. (2012). Performance of GPS Signal
Observables Detrending Methods for Ionosphere
Scintillation Studies. (Electronic Thesis or
Dissertation). Miami University. Retrieved from
https://etd.ohiolink.edu/
8. Van Dierendonck, A. J. (1996) GPS Receivers In B.
W. Parkinson, J. J. Spilker, P. Axelrad, and P.Enge
(Eds.), Global Positioning System: Theory and
Applications, vol. 1, American Institute for
Aeronautics and Astronautics.

9. Kaplan E. D. (1996) Understanding GPS: Principles
and Applications. Artech House, Boston, London.
10. Scott Gleason and Demoz Gebre-Egziabher (2009).
GNSS applications and methods, Artech House,
Boston, Massachussets.
11. Mao, X., Y. Morton (2013), GNSS Receiver Carrier
Tracking Loop Impact on Ionosphere Scintillation
Signal C/N0 and Carrier Phase Estimation, Proc.
ION GNSS+, Nashville, TN.




















