Viscosity-mediated motion coupling between pairs of trichobothria on the leg of the spider...
14
ORIGINAL PAPER Brice Bathellier Friedrich G. Barth Jo¨rg T. Albert Joseph A. C. Humphrey Viscosity-mediated motion coupling between pairs of trichobothria on the leg of the spider Cupiennius salei Received: 21 October 2004 / Revised: 7 March 2005 / Accepted: 10 March 2005 / Published online: 22 July 2005 ȑ Springer-Verlag 2005 Abstract Arachnids and insects use long, thin hairs as motion sensors to detect signals contained in the movement of the surrounding air. These hairs often form groups with a small spacing of tens to hundreds of micrometers between them. For air oscillation frequen- cies of biological interest, the potential exists for vis- cosity-mediated coupling among hairs in a group affecting their response characteristics. Even a small diameter hair can, in principle, affect the flow field around it and the dynamics of the hairs in its neigh- borhood. The viscosity-mediated coupling between a pair of hairs is investigated here both experimentally and theoretically. The conditions for the existence of the coupling effect, and its magnitude as a function of rel- evant parameters, are determined. In the range of bio- logically relevant frequencies (30–300 Hz), viscous coupling between pairs of hairs is only very small in the case of the spider Cupiennius salei. Theoretical analysis points to the relatively large spacing between hairs (20 to 50 hair diameters) and the tuning of the hairs to the above-mentioned frequencies to explain the practical absence of coupling. Keywords Medium flow reception Sensory hair arrays Viscosity-mediated coupling Trichobothria Spider air flow sensor Introduction The dynamics of arachnid and insect filiform hairs has been a topic of interest for more than 30 years (for the older literature see Tautz 1979 and Reißland and Go¨ rner 1985). The amplitude and frequency of hair deflection as a function of an imposed oscillating air flow can be accurately calculated for individual hairs (see Humphrey et al. 1993, 2003; Barth et al. 1993; Devarakonda et al. 1996 and references therein; Shimozawa et al. 2003). However, as these studies point out, the hairs are gen- erally found in clusters, or groups, of varying number and density. These groups range from just a few hairs of varying length and arranged in a row, such as the trichobothria on the leg of the spider Cupiennius salei (Barth et al. 1993), to the dense mat of filiform hairs on the cercus of the cricket Gryllus bimaculatus (Shimozawa and Kanou 1984a, b) and those regularly arranged ventrally on the cercus of the cockroach Periplaneta americana (Nicklaus 1965). According to available data, having clusters or groups of filiform hairs provides an animal with a number of sensory capabilities not pro- vided by the individual hair (Shimozawa et al. 1998; Barth 2002). Insect filiform hairs are supplied by one sensory cell only, and different hairs have different directional sensitivities. Whereas one hair is unable to signal stimulus direction several hairs taken together can. Groups of spider trichobothria of different lengths enlarge (1) the range of absolute sensitivity, (2) the fre- quency range, and in some cases at least (3) the range of stimulus directions that can be responded to (see review in Barth 2002). The biologically most relevant question of how arrays of flow sensors encode the spatial and temporal patterns of complex natural stimuli has not been studied yet. Humphrey et al. (1993) first remarked on the possi- bility of viscosity-mediated motion coupling between pairs of hairs for the spider Cupiennius salei. Specifically, they applied the arguments given in Batchelor (1967) and Panton (1984) for a steady flow aligned normal to Present address: B. Bathellier Brain and Mind Institute, EPFL, Ecublens, 1015 Lausanne, Switzerland B. Bathellier F. G. Barth (&) J. T. Albert Department of Neurobiology and Behavioral Sciences, Life Sciences, University of Vienna, Althanstr.14, 1090 Wien, Austria E-mail: [email protected] Tel.: +43-1-427754470 Fax: +43-1-427754507 J. A. C. Humphrey Department of Mechanical and Aerospace Engineering, University of Virginia, Charlottesville, VA 22904, USA J Comp Physiol A (2005) 191: 733–746 DOI 10.1007/s00359-005-0629-5
Transcript of Viscosity-mediated motion coupling between pairs of trichobothria on the leg of the spider...

ORIGINAL PAPER
Brice Bathellier Æ Friedrich G. Barth Æ Jorg T. Albert
Joseph A. C. Humphrey
Viscosity-mediated motion coupling between pairs of trichobothriaon the leg of the spider Cupiennius salei
Received: 21 October 2004 / Revised: 7 March 2005 / Accepted: 10 March 2005 / Published online: 22 July 2005� Springer-Verlag 2005
Abstract Arachnids and insects use long, thin hairs asmotion sensors to detect signals contained in themovement of the surrounding air. These hairs oftenform groups with a small spacing of tens to hundreds ofmicrometers between them. For air oscillation frequen-cies of biological interest, the potential exists for vis-cosity-mediated coupling among hairs in a groupaffecting their response characteristics. Even a smalldiameter hair can, in principle, affect the flow fieldaround it and the dynamics of the hairs in its neigh-borhood. The viscosity-mediated coupling between apair of hairs is investigated here both experimentally andtheoretically. The conditions for the existence of thecoupling effect, and its magnitude as a function of rel-evant parameters, are determined. In the range of bio-logically relevant frequencies (30–300 Hz), viscouscoupling between pairs of hairs is only very small in thecase of the spider Cupiennius salei. Theoretical analysispoints to the relatively large spacing between hairs (20 to50 hair diameters) and the tuning of the hairs to theabove-mentioned frequencies to explain the practicalabsence of coupling.
Keywords Medium flow reception Æ Sensory hairarrays Æ Viscosity-mediated coupling Æ Trichobothria ÆSpider air flow sensor
Introduction
The dynamics of arachnid and insect filiform hairs hasbeen a topic of interest for more than 30 years (for theolder literature see Tautz 1979 and Reißland and Gorner1985). The amplitude and frequency of hair deflection asa function of an imposed oscillating air flow can beaccurately calculated for individual hairs (see Humphreyet al. 1993, 2003; Barth et al. 1993; Devarakonda et al.1996 and references therein; Shimozawa et al. 2003).However, as these studies point out, the hairs are gen-erally found in clusters, or groups, of varying numberand density. These groups range from just a few hairs ofvarying length and arranged in a row, such as thetrichobothria on the leg of the spider Cupiennius salei(Barth et al. 1993), to the dense mat of filiform hairs onthe cercus of the cricket Gryllus bimaculatus (Shimozawaand Kanou 1984a, b) and those regularly arrangedventrally on the cercus of the cockroach Periplanetaamericana (Nicklaus 1965). According to available data,having clusters or groups of filiform hairs provides ananimal with a number of sensory capabilities not pro-vided by the individual hair (Shimozawa et al. 1998;Barth 2002). Insect filiform hairs are supplied by onesensory cell only, and different hairs have differentdirectional sensitivities. Whereas one hair is unable tosignal stimulus direction several hairs taken togethercan. Groups of spider trichobothria of different lengthsenlarge (1) the range of absolute sensitivity, (2) the fre-quency range, and in some cases at least (3) the range ofstimulus directions that can be responded to (see reviewin Barth 2002). The biologically most relevant questionof how arrays of flow sensors encode the spatial andtemporal patterns of complex natural stimuli has notbeen studied yet.
Humphrey et al. (1993) first remarked on the possi-bility of viscosity-mediated motion coupling betweenpairs of hairs for the spider Cupiennius salei. Specifically,they applied the arguments given in Batchelor (1967)and Panton (1984) for a steady flow aligned normal to
Present address: B. BathellierBrain and Mind Institute, EPFL, Ecublens, 1015 Lausanne,Switzerland
B. Bathellier Æ F. G. Barth (&) Æ J. T. AlbertDepartment of Neurobiology and Behavioral Sciences,Life Sciences, University of Vienna, Althanstr.14,1090 Wien, AustriaE-mail: [email protected].: +43-1-427754470Fax: +43-1-427754507
J. A. C. HumphreyDepartment of Mechanical and Aerospace Engineering,University of Virginia, Charlottesville, VA 22904, USA
J Comp Physiol A (2005) 191: 733–746DOI 10.1007/s00359-005-0629-5

the imaginary plane passing through the parallel axes ofa pair of trichobothria. They expected viscous couplingto be negligible if the normalized spacing between twohairs (s/d) is larger than the smaller of the pair {L/d,Red�1}. In these expressions, s is the distance between
hairs, d is the diameter of the hairs, L is their length, andRed { ” Vr d/m} is the Reynolds number of the hairbased on its absolute relative velocity Vr = | vh�v¥| (vhhair velocity, v¥ far-field velocity of the air flow), and thekinematic viscosity of air, m = l/q, where l is dynamicviscosity and q is density. (Note that because vh is notuniformly constant along the hair shaft, but is alwaysbounded between 0 and 1.5 v¥, we have used theapproximation Vr @ v¥ for simplicity when evaluatingRed.) For very long hairs, the criterion simplifies tos/d > Red
�1, approximately, which is in good agreementwith the theoretical findings of Cheer and Koehl (1987a)for the same type of flow past a pair of infinitely longcylinders in the range 10�5 £ Red £ 0.5. From thedrag results presented in their Fig. 8 approximate rela-tions for s/d = f(Red) can be derived for which viscos-ity-mediated coupling between a pair of cylinders isessentially negligible. The results are s/d ‡ 4.57 Red
�0.73
in the range 5 < s/d < 100 for a pair of cylinders withd = 1 lm, and s/d ‡ 5.01 Red
�1.00 in the range 10 <s/d < 500 for a pair of cylinders with d = 0.1 lm.
In spite of its appeal, the criterion proposed byHumphrey et al. (1993) is limited by the fact that itapplies to a pair of cylinders with the imaginary planejoining their axes aligned normal to a steadyapproaching flow. Notwithstanding, because for Cup-iennius we expect 10 < s/d < 100, 20 < L/d < 100,and 10 < Red
�1 < 1,000, approximately, the criterionsuggests that viscosity-mediated coupling between mi-cron-sized hairs in a cluster may exist for flow conditionswith s/d < 100 and Red < 0.01 and in flows withs/d < 5 and Red < 0.1.
In this study, we present an experimental method toevaluate viscosity-mediated coupling between filiformhairs immersed in an oscillating flow. We also present atheoretical model for viscosity-mediated coupling basedon the theory of Stokes (1851) for the oscillating flowaround an infinitely long cylinder with Red � 1. We willshow that in addition to s/d and Red, it is necessary toaccount for the oscillatory nature of the flow, and for themechanical properties of the hairs such as moment ofinertia, damping constant, and torsional restoring con-stant that affect their dynamics.
Materials and methods
Preliminary considerations
We are concerned with viscous flows past elongated,straight, cylindrically shaped filiform hairs at very smallvalues of the characteristic Reynolds number (Red � 1)for which the notion of a boundary layer does not
strictly apply. In a boundary layer flow viscous effectsare confined to a small region immediately around and afraction of the size of the object in the path of the flow.In the case of filiform hairs, the characteristic Reynoldsnumbers are so small that, in principle, viscous effectsextend many hair diameters away from the hairs. Nev-ertheless, it is useful to explore the nature of the flowsaround filiform hairs by considering first the relationsdescribing the thickness of a boundary layer in a steadyand in an oscillating flow at large values of the charac-teristic Reynolds number, and then asking what theserelations yield as the Reynolds number becomes verysmall.
Viscosity affects the velocity of a fluid in relativemotion with respect to a surface. For example, near tothe surface of a fixed plate, the motion of a fluid isslowed down by the shearing action of viscous forces.The viscous-dominated fluid layer near the surface isreferred to as the boundary layer. For steady, laminarflow approaching parallel to a thin plate with a sharpleading edge, the thickness, d, of the boundary layer oneither of its two surfaces is given by d ¼ 5:0
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
mx=U1p
;where m is the fluid kinematic viscosity, x is the distancefrom the leading edge of the plate, and U¥ is the freestream velocity of the approaching fluid (Schlichting1979). If, instead, a flow field oscillates sinusoidallyparallel to a very long fixed plate, the expression for danywhere along the plate is given by d ¼ 4:5
ffiffiffiffiffiffiffiffiffiffi
m=pfp
;(Schlichting 1979) where f is the flow oscillation fre-quency in Hertz. Thus, for both steady and oscillatingflows, increasing the fluid viscosity increases theboundary layer thickness. In the steady flow case, theboundary layer thickness increases with decreasing fluidvelocity; and in the oscillating flow case, it increases withdecreasing frequency.
We apply these arguments, qualitatively, to the flowsaround the surfaces of freely moving filiform hairs withtheir longitudinal axes aligned essentially normal to theapproaching flow. It follows that, for a pair of neigh-boring hairs a distance s apart, we might expect viscos-ity-mediated coupling if the boundary layers of the twohairs overlap significantly, meaning s £ 2d. Such acondition is favored by a steady flow with small velocityrelative to the hair surfaces, or by an oscillating flow atlow frequencies. Thus, for s < 2d viscous coupling be-tween pairs of hairs should be noticeable while fors � 2d it should be virtually non-existent.
The flow oscillating at frequency f and with relativefree-stream velocity Vr past a cylinder of length L anddiameter d such that L/d � 1, has a characteristicReynolds number Red and a characteristic dimensionlessoscillation frequency, X = fd/Vr. For Red � 1 Stokes
(1851) shows that a single dimensionless parameter,
given by k ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
pX Red=2p
¼ d=2ffiffiffiffiffiffiffiffiffiffiffiffiffi
2pf =mp
; is necessaryto characterize the dynamics of the flow and the totalforce, F0, acting on the cylinder. For a pair of identical,immobile, long, cylindrically shaped hairs (indexed ‘‘1’’and ‘‘2’’) a distance s apart such that they experience
734

viscous coupling, one expects the undisturbed value ofF0 for each hair to change so that F1=F2 „ F0.
Calling C = (F0�F1)/F0 the dimensionless parameterwhich characterizes the viscosity-mediated coupling be-tween the two hairs, we expect
C ¼ gðs=d; kÞ; ð1Þ
where g is an unknown function relating the dimen-sionless parameters. However, because filiform hairsrotate about their base as the result of the various torquesacting on the hair shafts, other dimensionless parametersarise in Eq. 1. Also, force differences are not the mostconvenient quantities to characterize viscous couplingbetween hairs and, instead, we employ differences in theamplitudes of hair deflection angle. Each of the hairs ‘‘1’’and ‘‘2’’ of a pair exposed to the same approaching airflow will oscillate with a maximum deflection angle href1and href2 if the other hair is absent. Due to viscous cou-pling, however, the maximum deflection angles are h1and h2. We define two new coupling coefficientsj1 = (href1 � h1)/href1 and j2 = (href2 � h2)/href2, whichdepend on the respective lengths and on the effectivemoments of inertia (Ieff), effective damping constants(Reff) and torsional restoring constants (S) of the hairs.Thus, more generally, we expect:
ji ¼ giðs=d; k;GRi;GSi;GRj;GSj; Li=LjÞ; ð2Þ
where the subscripts i and j denote hairs ‘‘1’’ or ‘‘2’’, andGR ¼ Reff=Ieffx and GS ¼ S=Ieffx2 (Humphrey et al.1993).
Driving air flow
Most measurements were performed on intact spiders topreserve the natural flexibility of the articulation of thetrichobothria. The spider was attached to a platformand immobilized. Sometimes we used an excised leg at-tached to the thin end of a glass pipette to reduce dis-tortion of the flow around the leg by the support. Eventhough the support may distort the flow, leading to anerroneous evaluation of medium velocity, it was verifiedthat the effect was minimal in the study of viscosity-mediated coupling between hairs in the same group. Anoscillating air flow was produced by a loudspeaker. Theleg was placed near its central axis where the velocityfield was verified to be unidirectional and directed alongthe leg. In this configuration, the flow of air is parallel toan imaginary plane passing through the axes of all thehairs in a cluster. The air velocity was measured indi-rectly with a probe microphone (Bruel & Kjaer Type4182 microphone and type 2610A amplifier) capable ofdetecting values of the pressure field averaged over avolume smaller than one cubic centimeter. We then usedthe Euler equation to deduce the value of the air velocityfrom the pressure gradient along the loudspeaker axis.The absence of pressure gradients in planes perpendic-ular to the central axis of the loudspeaker confirmed theunidirectionality of the flow.
Any disturbances to the velocity field in the vicinity ofthe hairs must be minimized since they can affect vis-cosity-mediated coupling. A trichobothrium could bemoved with minimal disturbances to the flow fieldsaround it by forcing the hair near its base by means of avery thin glass needle. It was shown that oscillating theneedle without mechanical contact with the hair shaftdid not induce hair motion. Since the dynamics of fili-form hairs is dominated by the force exerted along theupper part of the shaft (torque is maximum at the hairtip), the position of the needle near the base of the hairminimizes any needle-induced flow disturbances.
Angle and phase shift measurements
The hairs around the trichobothria were removed toimprove observation. The hair peak-to-peak deflectionangles were measured with a microscope (50· objectivelens) coupled to a video camera (Sony 3 CCD ColorVideo Camera Power HAD). Single pictures of hairsshowing maximum (peak-to-peak) end positions in anoscillation cycle were analyzed using image analysissoftware (Lucia M/Comet 3.52). The angular displace-ment of a hair was determined from the distance be-tween its two extreme positions measured at the samelength along the hair. The smallest linear resolution ofthe measurement tool was 4 lm, which limited thedetection of small angular displacements. For a maxi-mum hair deflection angle of 20� it was not possible toobserve variations in deflection smaller than 1�. Toefficiently detect small variations in the phase shift ofhair displacement, we used two stroboscopes(Drelloscop 2009AN; Strobotac-General Radio) trig-gered by the TTL output of the generator driving theloudspeaker with variable flashing delay in the cycle. Ifthe two images of the hair coincide when the flash fromthe second stroboscope occurs half a period after thefirst one, the trichobothrium is exactly halfway betweenits extreme positions (Fig. 1). This is the most sensitivelocation to phase variations and a small change in phaseshift will produce two non-coinciding images of the hair.For small angles the variation in the phase shift (D/ indegrees) is proportional to the ratio of the small dis-placement angle Dhs between two phase-shifted hairimages to the peak-to-peak displacement angle of hairmotion (Dhs/hpp):
D/ ¼ Dhshpp
180
p: ð3Þ
As an example, for a small relative displacementDhshpp¼ 10% the variation in the phase shift is D/ ¼ 6�:
Experimental protocol
The trichobothria on the legs of Cupiennius appear inclusters and differ in length within a cluster (Barth et al.
735

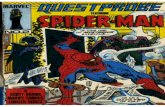
1993). A description of viscosity-mediated couplingamong the hairs in a cluster is inordinately complex.Therefore, in this study, we limit experimental and the-oretical analysis to one pair of trichobothria and pro-ceed as follows to experimentally determine the amountof coupling between them. During an experiment, thedriving flow oscillation frequency is fixed. In all experi-ments, the amplitude of the flow velocity is kept below1 m/s to ensure Red � 1 and, typically, 0.03 £ v¥ £0.3 m/s so that 0.02 £ Red £ 0.2. Biologically rele-vant air flows experienced by Cupiennius are usuallyconsiderably below 1 m/s (Barth et al. 1995; Barth andHoller 1999). One hair (H1) is free to move under theviscous action of the flow, including whatever distur-bances affect it as the result of separately manipulatingthe motion of the neighboring hair (H2). The ‘‘no cou-pling’’ reference for phase shift and amplitude is ob-tained by removing the influence of H2 on the flow fieldby simply deflecting it completely out of the way, againstthe leg surface. In the first test (Fig. 2A), both themanipulated hair and its neighbor were allowed tooscillate freely while any changes in phase or amplitudeof the neighbor as compared to the ‘‘no-coupling’’ ref-erence state (H2 removed) were measured. This gave thenatural amount of coupling between the two tricho-bothria. In the second test (Fig. 2B), the manipulatedhair H2 was fixed at its equilibrium position whilemeasurements were again made on its freely oscillatingneighbor H1. Thus, the role of hair motion itself in thecoupling was revealed. In a third test (Fig. 2C), H2 wasmechanically driven by a thin glass needle attached to asinusoidally oscillating vibrator (Ling Dynamic SystemsModel V 106). The frequency of the vibrator was
checked using the stroboscope to ensure it was the sameas the frequency of the air flow oscillation used before.We measured the amplitude of the deflection of theneighboring hair H1 due to the motion of H2 as afunction of frequency.
Results
Qualitative observations
We first checked the coupling between several pairs oftrichobothria (14 pairs of three different animals) pri-marily located in tarsal (TaD) and metatarsal (MeD 6, 5and 1) clusters (see Barth et al. 1993 for nomenclature).The spacing between these hairs ranged from 250 lm to350 lm and their diameters were close to 7–8 lm givinga range of s/d of 30–45, approximately. We applied aflow with oscillation frequency 100 Hz giving values fork between 7 and 8. The air flow velocities used were
Fig. 2 Experimental procedures to reveal the existence of hair tohair viscous coupling. A and B A pair of hairs was observed inthree different experimental situations. Hair 2 (H2) is defined as thedisturbing hair while the deflection of Hair 1 (H1) was measured.A From left to right: H2 is removed to allow H1 to oscillate in anunperturbed state (reference). H2 is let free to oscillate normally.B H2 is arrested at its resting position. With H2 arrested slightviscous coupling is indicated by a small phase variation (arrow).The effect is not seen when H2 is moving freely (see A). The peak-to-peak amplitude of H1 only decreases when H2 is arrested(arrow). C. When driving H2 using a glass pipette coupled to avibrator viscous interaction resulted in a small deflection of H1(arrow)
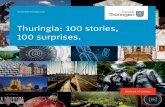
Fig. 1 Phase shift measurement. The rise of the TTL output signalfrom the source generator provides the time reference in each cycle.It triggers two strobe lights with a settable delay. To capture smallphase shift variations due to air flow perturbations, the first strobelight flashes when the hair is at the middle point of its deflection(phase shift 0 for the deflection angle). The second strobe lightflashes with a delay of half a period. Upper trace: Without flowperturbation the two pictures taken between the two extremepositions of hair deflection are superposed (see blue trace of hairdepicted on the right). Lower trace: In case of flow perturbation,the hair deflection cycle is shifted in time. The two strobe lightpictures are no longer superposed as the schematic drawing shows(right). The angular separation D hs of the two pictures provides ameasure of the phase shift variation D/ according to Eq. 3
736

within the boundaries mentioned above. However, inorder to maximize the chance of seeing even very smallcoupling we often worked near v¥ £ 0.3 m/s.
Because of the weakness of the interactions and thelimited precision of the measurement, direct observationof any coupling effects was difficult for these conditions.At no moment was a variation of phase shift or deflec-tion amplitude seen for the intact pair compared to themotion of the isolated hairs (Test 1, Fig. 2A). However,using the phase shift technique we observed a smallperturbation in the motion of the neighboring hair whenH2 was immobilized (Test 2, Fig. 2B). For this case, thevariation of phase shift ranged from 5�, when themanipulated hair was fixed at its rest position, to 10�,when it was moved closer to (deflected towards) the free-moving neighbor. When one hair was displacedmechanically with the glass pipette coupled to a vibrator(Test 3, Fig. 2C), a viscous coupling acting on neigh-boring hairs in the form of a tiny deflection (the image ofH1 was blurred) was observed as well, but could not bemeasured precisely. This blurring was not due to anyvibration propagating in the exoskeleton from H2 toH1, because if H2 was deflected laterally but still dis-placed with the same amplitude the blurring vanished.Lateral bending diminishes air borne interactions be-cause both hairs are no longer in the same plane. Itwould not diminish vibrations in the legs. These are veryunlikely anyway when considering the extremely smallstiffness of a trichobothrium’s articulation (elasticrestoring constant in the order of 10�12 Nm/rad; Barthet al. 1993).
These preliminary results leave the existence and themagnitude of a viscous interaction between trichoboth-ria undecided, because Tests 2 and 3 attest to the exis-tence of some perturbation, whereas in the ‘‘natural’’situation (Test 1), no change was observed. The ambi-guity of our results may have been mainly due to ourincapacity to capture the tiny changes due to viscouscoupling precisely enough. We therefore concentratedon a particular pair of trichobothria that had a suffi-ciently small spacing to produce larger coupling.
Quantitative results
For quantitative experiments, we chose a pair oftrichobothria on the spider tarsus (cluster TaD) whichwere only 180 lm apart (s/d � 22.5). The hairs were650 lm (Hair 1) and 750 lm (Hair 2) long. Hair 1 wasobserved while manipulating Hair 2 to perform Tests 1,2 and 3 mentioned above. Other cuticular hairs on thetarsus were removed to facilitate observation and toeliminate other possible sources of perturbations. Thedriving flow was set at about 0.3 m/s (depending onfrequency) for which the deflection of the two tricho-bothria was large enough to detect viscosity-mediatedcoupling and small enough to avoid contact between thetwo hair tips. A deflection amplitude of about 15� peak-to-peak was chosen for Hair 1 when Hair 2 was driven
by the vibrator. These experiments provided values ofthe phase shift variation and of the coupling coefficientj 1=(href1 � h 1)/href1 defined above. Figure 3 gives thecoupling coefficient j1 as the percentage of angulardisplacement amplitude decrease of Hair 1 compared toits deflection for the ‘‘no-coupling’’ reference state. Thevalues shown in the figure are averaged over five mea-surements taken for one pair of hairs and have an esti-mated precision of ± 5%. Very similar results(discrepancies less than ± 5%) were obtained with thesame protocol for two other similar pairs of tricho-bothria from the same location on two other animals.However, for the sake of consistency, we did not averageover these results because spacing and hair length wereslightly different in these two cases.
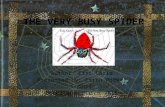
Fig. 3 Deflection angle amplitude and phase shift variations(amplitude variation corresponding to coefficient j1 defined in‘‘Materials and methods’’) induced by viscous coupling in Hair1(H1). Experimental results (n = 3) (black bars; average of five trialson the same pair of hairs in the tarsal TaD group; length of H1 andH2 650 lm and 750 lm, respectively. Comparable results areobtained with two other similar pairs of hairs.) are compared totheoretical values (grey bars). Driving flow frequencies were 40, 70,100, and 150 Hz. Measurements were made on H1 while H2 wasdisturbing its motion. A If H2 is moving freely, no relevant effect isseen on H1 (variations of the order of the mean deviation; see errorbars). B If H2 is arrested, H1 deflects with decreased amplitude anda small change of phase (6�). CH1 is deflected when H2 is driven bythe vibrator (no driving air flow) at three different frequencies. In Aand B, amplitude variations are given as percentages of thereference peak-to-peak deflection angle amplitude of H1 (unper-turbed). In C values represent percentages of H2 deflectionamplitude. The error bars do not represent standard deviationsbut errors expected due to the fact that the precision of lengthmeasurements is about ±5 lm (size of one pixel). The bars shownare larger than those resulting from the computation
737

For the tests with the immobilized hair (Fig. 3B) andthe mechanically driven hair (Fig. 3C), viscosity-inducedinfluences of 5% to 15% were observed for the free-moving neighbor hair. However, as was found using thephase shift method in our preliminary experiments, thecoupling was not significant when both hairs were free tomove (Fig. 3A). In that case, the variations were stillbelow the level of measurement reliability (5%) indi-cating the smallness or the practical absence of couplingunder natural conditions. Driving one of the hairsmechanically elicited a clearly measurable deflection ofthe neighboring hair, implying that coupling was presentfor these conditions.
Tests with Hair 2 immobilized revealed that the flowof air around a fixed hair can be significantly affected atrelatively large (in this case up to 400 lm) distancesfrom it. However, this test was not as precise as that withthe mechanically driven hair. To obtain observablevariations of hair displacement amplitude, large peak-to-peak deflection angles were used. This made it nec-essary to work near the limit of linearity of the torsionalrestoring constant (generally 16� peak-to-peak, obser-vations by B. Bathellier, data not shown) or somewhatabove. As it turns out the measured change in hairdeflection may have been underestimated as the sensi-tivity of trichobothria decreases at higher deflectionangles. The effects of the nonlinearity of the basal tor-sional restoring constant on hair deflection should beless prominent at higher frequencies for which thedependence on this parameter decreases (see below).
Model for viscosity-mediated coupling between hairs
The experiments described above show that in two, al-beit artificial, cases, the motion of a trichobothrium canbe perturbed by that of its neighbor. In contrast, for apair of free-moving hairs no coupling was observed towithin the precision of the measurements. One may askwhether hair dynamics works to minimize the amount ofpotentially possible viscous coupling. To answer thisquestion, a model of viscosity-mediated coupling wasdeveloped which also serves to evaluate and generalizeour experimental findings.
In what follows, complex variable notation is usedsince it is especially well suited to describe the presentproblem compactly. A quantity such as the near-field airvector velocity v, which varies with the spatial coordi-nates (x, y, z) and time (t), has the form v(x,y,z,t) = vmax (x,y,z)cos(2p ft � U). In complex vari-able notation, this expression is equivalent to v(x,y,z,t) = vmax (x,y,z)exp(i2p ft � i U) since only thereal part of the expression written in complex notation isof interest. Because exp(i2pft) factors out everywhere inthe analysis, it is possible to write v (x,y,z,t) = v*(x,y,z)exp(i2p ft) with v* (x,y,z) = vmaxexp(�i U). Thus,in this study, any complex value marked by a * containsboth the maximum amplitude and the phase shift of thegiven quantity and not the time dependence.
Near-field velocity around a cylindrical hair in a flowoscillating normal to it
Because of its large length to diameter ratio (L/d > 20),and despite the gradual taper and curvature from base totip, the trichobothria of Cupiennius can be approximatedby a long, straight cylinder of constant effective diameterd (Humphrey et al. 1993). We set the Cartesian coordi-nates as x (unit vector ex) aligned in the direction of theimposed oscillatory flow, z (unit vector ez) aligned in thedirection of the hair shaft, and y the remaining orthog-onal coordinate direction. The hair oscillates about itsbase with a time-dependent deflection angle h (t) andvelocity _h (t) in the direction of the flow. For smallangular deflections of the hair (less than � 20� peak-to-peak), the velocity of the shaft at position z above itsbase is given by vhðz; tÞ ¼ v*h ðzÞ expði2pftÞ ¼ z _hðtÞ:
For the range of frequencies (10 < f < 150 Hz) andmaximum far-field air flow velocities (v¥ < 0.3 m/s) ofinterest here (see the Appendix), the near-field air flowvelocity can be calculated using the theory of Stokes(1851). We call v¥ (t) = v¥exp(i2p ft)ex the unidirec-tional, x-directed, uniform far-field oscillating air flow
Fig. 4 Geometry of hair to hair interaction model. A The twocylinders of diameter d represent the pair of hairs arranged alongthe direction of the incoming air flow (v¥). The parameter s denotesthe spacing between the two hairs and is also the norm of the vectors that denotes the position of Hair 2 with respect to Hair 1. Due tohair deflection, the speeds (v1 and v2) of hair shaft movementdepend on the vertical coordinate z. B Cross section of Fig. 4A,showing the two dimensional simplification of the model. Note theuse of cylindrical coordinates (angle w and distance r from thehair’s axis standing for the position vector r). C Schematic plot ofthe modulus of the two normalized perturbations Dx along x-axisfor y = 0. The key aspect of our model of viscous interactionsbetween a pair of hairs is to solve the no-slip conditions with alinear summation of these two perturbations. Furthermore, thevalue of the perturbation induced by H1 at the position where H2is standing (or symmetrically) is noted D0. This value is then usedto calculate the actual perturbation on hair motion induced by aneighboring hair
738

velocity (Fig. 4). The expression for the near-fieldvelocity v around a hair such as Hair 1 in Fig. 4 can bewritten in shorthand notation using a vector D (a com-plex quantity) normalized by the far-field velocity thatcaptures the distorting effects of the hair on the velocityfield. The near-field vector velocity v is a function of thevector position, r, denoting a point (r, w) in cylindricalcoordinates or, equivalently, denoting the same point (x,y) in Cartesian coordinates in the two-dimensional spacesurrounding the hair located at the origin (see Fig. 4).
At a height z along the hair shaft the instantaneous x-and y-components of the air velocity are given by:
v�xðr;w; zÞ ¼ v1 � Dxðr;wÞðv1 � v�hðzÞÞ; ð4Þ
v�yðr;w; zÞ ¼ �Dyðr;wÞðv1 � v�hðzÞÞ: ð5Þ
The x- and y- components of D in these equations arederived following the theory of Stokes (1851) and thefinal relations are provided in the Appendix. Note thatthe no slip condition (vx(d/2,w) = vh and vy(d/2,w) = 0)requires Dx=1 and Dy= 0 on the hair surface (r =d/2).Dy is not a significant factor in determining the near-fieldvelocity distribution in the x or y directions, as it is zerofor w = 0 or 90� (see the Appendix). Since in this workwe are only concerned with hairs perfectly aligned withthe flow, we ignore Eq. 5. In fact, a numerical evaluationof Dy shows that it is not a significant contributorcompared to Dx (D0 is a special case of Dx). Theexpression for Dx is evaluated using Maple 5 softwareand the result is plotted in Fig. 5. The plot correspondsto a flow oscillating at 100 Hz and shows that: (a) Dx is
distributed symmetrically about both the x and y axes;(b) the effects of viscous forces are diffused morestrongly in the x direction of fluid motion than in the ydirection. A similar observation is made for all fre-quencies, with a slower decrease in the amplitude of Dx
at lower frequencies.
Viscosity-mediated coupling of two cylindrical hairsin tandem
Consider next two identical, long, cylindrical hairs H1and H2 located at position vectors r1 and r2 = r1+s,where s is the distance vector between them (Fig. 4).The hairs are assumed to be immersed in a flowoscillating uniformly at the far-field velocity v¥ alignedalong the x-coordinate direction, parallel to an imagi-nary plane passing through the axes of the hairs. Fol-lowing Stokes (1851), linearity is invoked to express theflow at any vector location r with origin at r1 (for hairH1) and r � s with origin at r2 (for hair H2) as the sumof the unperturbed background flow, v¥, and thevelocity perturbations associated with D(r) for hair H1and D(r � s) for hair H2, respectively. It follows forthe component of motion in the x-coordinate directionthat:
v�x ¼ v1 � A1ðv1 � v�1ÞDxðrÞ � A2ðv1 � v�2ÞDxðr� sÞ;ð6Þ
where v1 (t) = exp(i2pft )v1* and v2 (t) = exp(i2pft)v2
* arethe velocities of Hair 1 and Hair 2, and A1 and A2 aretwo unknown complex constants that can be determinedfrom the no slip condition (vx
*= v1* or v2
*) on the surfaceof each hair. In the derivation of Eq. 6 it is assumedthat, because s/d � 1, variations of the perturbationinduced by Hair 1 are negligible in the immediatevicinity of Hair 2 (and conversely). This statement canbe verified by reference to Fig. 4, where, for a spacing ofaround 200 lm, variations of Dx over one-hair diameter(10 lm) are less than 1%. As a consequence, for exam-ple, the perturbation induced by hair H2, on the flownear the surface of hair H1 can be taken as homogenousaround hair H1 and of value Do = Dx(�s) = Dx(s). (Itfollows that Dx(�s) = Dx(s) because, as shown inFig. 4, D is symmetric with respect to both the x and yaxes. However, to fully understand this argument, fol-lowing Stokes (1851) it is assumed that the hair is im-mersed in a periodically oscillating, locally homogenousflow which does not disrupt the symmetry.) The no-slipvelocity condition on each hair yields two equationscontaining A1 and A2 that are solved to give:
A1ðv1 � v�1Þ ¼v1
1þ D0þ v�2D0
1� D20
� v�11� D2
0
; ð7Þ
A2ðv1 � v�2Þ ¼v1
1þ D0þ v�1D0
1� D20
� v�21� D2
0
: ð8Þ
Fig. 5 The real part of the normalized two dimensional perturba-tion D0 in the plane (x, y) perpendicular to hair axis (see Fig. 4B)for a 100 Hz driving air flow directed along y. In the center (opencircle marks position of hair) D0 is equal to 1, corresponding to themaximum perturbation directly at the hair surface (no slipcondition). Perturbation slowly vanishes with distance. Note thestronger decrease of D0 along coordinate y (direction of flow) thanalong coordinate x
739

Since the force exerted by the air on H1 (or H2) isproportional, via the viscosity l, to the integral of thesurface-normal gradient of vx over the entire hair surface(Stokes 1851), the viscous force acting on a single hair is
F �0 ¼ lðv1 � v�hÞI
r¼d=2r �DxðrÞ½ �r¼d=2 dS: ð9Þ
That acting on either one of a pair of hairs is
F �i ¼ lðv1 � v�i ÞAi
I
r¼d=2r �DxðrÞ½ �r¼d=2 dS; ð10Þ
where i =1 or 2 (hair H1 or H2) and �[ Dx (r � s)] @ 0from the assumption above.
From these expressions, it is possible to obtain aviscosity-mediated coupling parameter given by thefractional change in the force acting on an undisturbed(single) hair relative to the force acting on one of a pairof hairs that are coupled through the flow. The result is
Ci ¼F �0 � F �i
F �0¼ 1� Ai: ð11Þ
If both hairs are immobile, C = C1 = C2 fullycharacterizes the coupling (see Fig. 7A). However, if thehairs are in motion, it is necessary to account for theirdynamics, and deflections, not forces, need to be com-pared.
Effect of hair dynamics
Preliminary comments
We present here an abbreviated version of the derivationof the hair deflection angle provided in Humphrey et al.(1993). For an isolated hair of diameter d and length Lsuch that L/d � 1, the torque T(t) = T*exp(i2pft) ex-erted by the air on the hair shaft is the integral of theforces F(z,t) =F* (z)exp(i2 pft) exerted on all horizontalsegments (between z and z+d z) of the hair along thehair length:
T � ¼Z
L
0
F �ðzÞz dz ð12Þ
Setting a ¼ lH
r¼d=2r �DxðrÞ½ �r¼d=2 dS in Eq. 9 wefind:
T � ¼ aZ
L
0
ðv1 � v�hðzÞÞz dz ð13Þ
The quantity a can be obtained using Stokes’ theoryto analytically calculate Dx (r) as was done by Hum-phrey et al. (1993) who give a = 4 p lG � ip2 l G/gwhere G = g/(g2+ p 2 /16) and g = ln(k), showing aweak, logarithmic dependence on frequency through k(defined above). For a pair of hairs, the only change
required is to take Eq. 10 instead of Eq. 9 for the forceexerted on a segment of the hair. Consequently, forhair H1 disturbed by hair H2 we obtain T � ¼aR
L
0
A1ðzÞðv1 � v�1ðzÞÞzdz which, after replacement ofA1ðzÞðv1 � v�1ðzÞÞ by its expression from Eq. 7, gives:
T � ¼ aZ
L
0
z dzv1
1þ D0� v�1ðzÞ1� D2
0
þ D0v�2ðzÞ1� D2
0
� �
: ð14Þ
Introducing this expression into the angularmomentum equation for a hair modeled as a forced,damped, harmonic oscillator (Humphrey et al. 1993)
Id2hdt2þ R
dhdtþ Sh ¼ T ð15Þ
makes it possible to calculate the effect of viscosity-mediated perturbations on the deflection angle, h(t) = h*exp(i2p ft), of one hair of a pair for a flowoscillation frequency f. The quantities S, R, and I are,respectively, the torsional restoring constant, thedamping constant, and the moment of inertia of atrichobothrium. In the case of an isolated hair, analysisshows that the driving torque T* in Eq. 13 depends onthe medium damping parameter Rl = aL3 /3. The tor-que associated with this quantity is given by T* = Rl
(3v¥ /2L � i2p fh *). Using this result we obtain fromEq. 15
h� ¼ 3v1Rl
2L1
S þ i2pf ðRþ RlÞ � ð2pf Þ2I: ð16Þ
(For a better understanding of this step, recall thepreliminary comments made above concerning the useof complex variable notation.) Similarly, using Eq. 14instead of Eq. 13, it is possible to obtain expressions forthe torque T* and then for the hair phase shift anddeflection angle of one hair (Hair 1) in the presence ofanother (Hair 2). For the deflection angle, we find
h�1 ¼3v1Rl
2L1
e0 þ e000 2c23S þ i2pf ðRþ e00RlÞ � ð2pf Þ2I
; ð17Þ
where c2 ¼ _h�2L2=v1 is a complex quantity, its argumentbeing the phase shift of the hair deflection velocity, andits modulus |c 2 | being the peak value of hair tipvelocity normalized by the far-field velocity. Thequantities e¢, e¢¢, e¢¢¢ are constants describing the hair–hair viscous coupling and their values are given inTable 1. To understand the physical meaning of theseconstants it is necessary to look back to Eq. 14 wherethree terms are present inside the integral. The quantitye¢ results from the first term and represents the staticperturbation of Hair 2 on the flow at the place whereHair 1 stands. The quantity e¢¢ results from the secondterm and gives the perturbation of Hair 2 on thedamping of the motion of Hair 1 in the medium. Thequantity e¢¢¢ stands for the dynamic perturbation of the
740

flow (the mass of air that is brought into motion due tothe deflection of Hair 2).
These formulae are used to calculate the theoreticalresults for comparison with the experimental observa-tions in Fig. 3 and the theoretical curves presented inFigs. 6B and 7. For the parameters S, R and I of Hair 1(650 lm), we use values derived by fitting our mea-surements (see measurements and fitting for L=650 lmin Fig. 6A) for deflection angle velocity as a function offrequency to the time derivative of Eq. 16. (We used aleast square approximation method—see Humphreyet al. 1993 and Shimozawa et al. 1998 for a similarmethod). The quantity c 2 (data not shown but very closeto measurements for Hair 1 due to similar length) isevaluated analytically for all frequencies by using valuesof S, R and I, obtained in the same manner as for Hair 1.
Suppression of viscosity-mediated coupling
For the trichobothria of Cupiennius, the hair dampingconstant R is small relative to the added air dampingconstant Rl (Humphrey et al. 2001, 2003). For a largerange of frequencies (50 – 500 Hz, depending on thehairs) it can also be shown that the dominant term in thedenominator of Eq. 16 is i2 pfe¢¢Rl. This results in aplateau (see Fig. 6A) for the quantity c ¼ _h�L=v1 (nor-malized hair deflection velocity) which approaches thevalue 3/2 when Rl � R as is the case for long hairs.Thus, for this range of frequencies and hairs long en-ough that c2� 3/2, it follows that
h�1 �3v1
i4pfL1
e0 þ e000
e00: ð18Þ
Since for L1 = L2, we also find e¢+e¢¢¢ = e¢¢, it fol-lows that h1ðtÞ � ð3v1=i4pfL1Þ expði2pftÞ and we con-clude that the motion of a hair in a pair is unchangedcompared to that of an isolated hair (also shown clearlyin Fig. 6B). This, therefore, is the basis for the sup-pression of viscosity-mediated coupling. Simultaneousperturbations of the damping and driving torques canoffset each other because they are equal (e¢+e¢¢¢ = e¢¢)when L1 = L2, and because the friction in air dominatesall other parameters determining the motion. However,this result is highly dependent on the similarity of hairsand the fact that air damping dominates the motion.Both are strong conditions but they are often verified in
trichobothria of Cupiennius in the frequency range ofbiological flows (30–200 Hz, Barth and Holler 1999),where the trichobotria are light enough and their tor-sional restoring constants are small enough to follow themovements of air reliably and consequently to minimizetheir perturbation of the flow. If hair H2 is immobi-lized (c2= 0), hair H1 will have h1ðtÞ � 3v1
2L1ð1� D0Þ
expði2pftÞ: Its deflection amplitude decreases propor-tionally to the local perturbation of the flow D0 as weobserve (see Fig. 3 and qualitative observations).
Discussion
Applicability of the model of hair-to-hair interactions
There is good qualitative agreement between our theo-retical model and experimental observations in mostcases (Fig. 3). For the immobilized hair experiment, theinability to detect minimal variations of deflectionamplitude forced us to work at the edge of the nonlin-earity of trichobothria dynamics. The effect of thenonlinearity introduced by the basal spring S decreasedwith increasing frequency due to the increased influenceof the total damping. This explains the good agreementfor 100 Hz and 150 Hz and the lack of agreement for40 Hz and 70 Hz. The theoretical approach seems toyield realistic results, especially for the experiment wherea hair was mechanically driven to induce the motion ofits neighbor. The consistency of our present model withearlier theories (see Humphrey et al. 1993) can be shownby increasing the spacing s between a pair of hairs tovery large values. D0 vanishes for large spacings betweenthe trichobothria; see the expression for Dx in theAppendix where a normalized spacing r/d = g is used.(Note that as g fi ¥, Dx fi 0). Therefore, Eq. 16yields the formula for the deflection angle of a single hairas derived by Humphrey et al. (1993).
Figure 7 shows the coupling coefficients expectedfrom our analysis for a pair of hairs as a function of thespacing between them, s/d, and the flow oscillation fre-quency, f. The theoretical results plotted in Fig. 7Acorrespond to very small values of the Reynolds num-ber, Red, but, in practice, from the analysis provided inthe Appendix, it suffices that Red < 0.06. In agreementwith Cheer and Koehl (1987a), the curves in Fig. 7Ashow that the degree of coupling (measured in terms ofC as the decrease of the force exerted by the air on a pairof immobile hairs) decreases with increasing s/d. How-ever, from the present analysis, it is clear that the degreeof this dependency varies with frequency. The lower thefrequency the thicker is the region of viscous overlapbetween hairs and hence the stronger the viscous cou-pling. Notwithstanding, for all three oscillation fre-quencies, we find that C < 0.02, approximately, for s/d> 50, and the coupling between hairs is very weakirrespective of frequency. The criterion derived fromCheer and Koehl (1987a), discussed above, suggests thatin the range 5 < s/d < 100 the coupling between a pair
Table 1 Coupling coefficients for all possible cases as used inEq. 17. D0 is the value of the normalized perturbation Dx of theflow due to Hair 1 at the position of Hair 2 (and vice versa). L1 andL2 are shaft lengths of the observed hair (H1) and the disturbinghair (H2)
e ¢ e ¢¢ e ¢¢¢
L1=L2 1� D0
1þD01þ D2
0
1�D20
D20
1�D20
L1>L2 1� L21
L22
D0
1þD01þ L3
1
L32
D20
1�D20
L21
L22
D20
1�D20
L1<L2 1� D0
1þD01þ D2
0
1�D20
L2
L1
D20
1�D20
741

of cylinders each of diameter d =1 lm can be neglectedif s/d ‡ 4.57 Red
�0.73. Setting Red = 0.06 in this relationyields s/d ‡ 36, in good agreement with our theoreticalfinding.
For the cases with dynamic interactions (Fig. 7B), thegeneral dependencies on frequency and spacing areconserved but coupling also depends on the experi-mental conditions of the pair of hairs. Particularlyinteresting is the suppression of coupling of similar hairsat frequencies where their deflection speed is at itsmaximum (represented by the plateau of coefficientc ¼ _h�L=v1 � 3=2). This finding is potentially relevantto the detection of air flow since interactions are strongeroutside this frequency range, particularly below thelower cutting frequency (around 50 Hz depending on
hair properties), sharpening the lower edge of the pla-teau (or of the resonance peak), and thus, improving thetuning of a sensor. Above the upper cutting frequency(from 500 Hz in longer hairs up to several thousandsHertz for shorter hairs), the suppression phenomenon
Fig. 7 A Variation of the force exerted by air on a cylinder (orequivalently of the coefficient of coupling C) for a pair of immobilecylinders plotted against the dimensionless spacing s/d(d = 10 lm) and its dependence on the frequency (50 Hz,100 Hz, 200 Hz) of the oscillating flow. B Variation of thedeflection amplitude (or equivalently of the coefficient of couplingj1) for a pair of filiform hairs plotted against the dimensionlessspacing s/d (d = 10 lm) and its dependence on the frequency(50 Hz, 100 Hz, 200 Hz) of the oscillating flow. In each case, thethree experimental situations (both hairs free to move, one hairfixed, one hair driven mechanically without air flow) are shown
Fig. 6 A Ratio c ¼ _h�L=v1 as a function of frequency for differenthairs; experimental data for two hairs 1,330 lm (filled circle) and1,030 lm (open circle) long and for Hair 1 of the pair studied (filledtriangle � 650 lm long). Each point is an average of fiveconsecutive measurements but precision is only ±10%. Continu-ous line represents the fitted curve for Hair 1 according to Eq. 16giving parameters I, R and S for this hair. A very similar curve isobtained the same way for Hair 2. When c reaches a plateaucoefficient Rl is prevalent in the equation of motion. B Amplitudevariation induced by viscous coupling as a function of frequency.Calculations are for the three experimental cases examined in thepresent study: H2 is free to move, arrested, or mechanically driven.Values are also given for the cases of H2 being twice as long as H1(2L1) and the reverse (L1/2). If H2 is free to move (continuous line),one observes a suppression of the coupling corresponding to theplateau of |c| (compare with A). This suppression vanishes if H2 isarrested, and if H2 is much longer than H1 (2 L1). In contrast, thereis very little coupling if the disturbing hair is smaller (L1/2)
742

disappears, but the coupling also vanishes because of thedecrease of viscous effects with frequency (see the de-crease of the coupling with frequency in Fig. 7). A sit-uation where viscous coupling between bristles or hairson arthropod appendages does occur is the feedingappendages of copepods. These have leakiness depend-ing on Reynolds number and function like paddles orrakes, accordingly (Cheer and Koehl 1987a). Anotherinteresting situation where viscous coupling may arise isbetween the chemosensory hairs on a moth antenna,again affecting leakiness and hence sensitivity to odor(Vogel 1983; Cheer and Koehl 1987b).
Implications for the physiology of Cupiennius salei
We did not observe perturbations of the motion for apair of freely moving hairs between 40 Hz and 150 Hz.Theoretical analysis (Fig. 6B; see decrease of the coeffi-cient j1 towards 0 when the coefficient c of the hair tendsto reach a plateau) shows that this striking result is dueto hair dynamics when the hairs are similar and the airdamping constant dominates the equation of motion.Removing one of these conditions increases the couplingtowards what we observe when one hair is fixed exper-imentally. The condition of dominant damping has beenexplained in the last paragraph of ‘‘Results’’. The con-dition of similarity can be understood by looking at thethree constants � presented in Table 1, and by observingtheir role in Eq. 17. If the disturbing hair (hair H2) ismuch longer than the observed hair (hair H1), then e¢¢¢approaches 0 whereas e¢ and e¢¢ remain unchanged.Therefore, h 1
* goes to ð3v1=2L1Þð1� D0Þ which is thevalue found when hair H2 is fixed. Thus, longer hairs
with a slower deflection speed (Humphrey et al. 1993)are sensed by the faster shorter hairs as being essentiallyimmobile which increases the disturbance. In contrast,larger hairs essentially do not sense the perturbation ofsmaller hairs because their dynamics is mainly deter-mined by the upper part of their shaft that is removedfrom the perturbation. Both these effects are presentedin Fig. 6B, which evaluates the coupling experienced bya hair of length L1 in the presence of hairs twice or halfits length. As a consequence, the large variation oflength typical of trichobothria could allow for strongercoupling than measured for the free moving hairs in thepresent study.
However, in groups with the smallest spacing,neighboring hairs are almost always of relatively similarlength because the length of the hairs decreases in agradual manner. This arrangement is especially evidentin the tarsal group TaD and in other groups with smallspacing (less than 300 lm; s/d < 30, approximately)such as groups LA and LP of the tibia or D6 on themetatarsus (for nomenclature see Barth et al. 1993). Ingroups with much larger differences in length betweenneighboring hairs (like D1, D3 and D5 on the metatar-sus), the spacing is comparatively large (>350 lm;s/d > 35, approximately). Hence the typical arrange-ment of trichobothria reduces or eliminates interactionswhile keeping some length variability that may benefitthe more efficient sampling of wind signals.
Considering all these observations, it is hard toimagine a decrease of hair deflection amplitude largerthan 10% above 40 Hz in any case. According to ourobservations, displacement perturbations induced byneighboring hairs are generally much smaller than 5%.To put these numbers in perspective, consider the cou-pling coefficient profiles shown in Fig. 7B and comparethese for the typical normalized spacing found for tric-hobotria: 10 < s/d < 100 being the maximum rangeand 20 < s/d < 50 being observed more commonly.Such small perturbations are unlikely to be importantbiologically. Phase shift variations will remain evensmaller (below 2%, see Fig. 3 for an example of stronginteractions). The magnitudes of flow perturbations in-crease with decreasing frequency and may becomenotable even for large distances (|D0| = 0.3 for 10 Hz incontrast to |D0| = 0.13 for 40 Hz for a distance fromthe hair of 300 lm). This may contribute to the insen-sitivity of hairs to low frequency signals. However,behavioral (Brittinger 1998) and electrophysiological(Barth and Holler 1999) experiments show that relevantsignals have frequencies ranging between 30 Hz and200 Hz which corresponds to the range of dominant airdamping where interaction tends to be excluded. Lowfrequencies are unlikely to be interesting for Cupienniussalei as they should mostly contain background noise.Recorded responses of the sensory neurons underlyingtrichobothria also show a preference for higher fre-quencies (best response at ca.100 Hz, Barth and Holler1999). So very reasonably we can consider that the largemajority of the relevant sensory inputs come from
Fig. 8 A Cartoon of situation in a group of filiform hairs such ascricket cercal hairs. For simplicity, a regular arrangement of smalland long hairs is chosen. Periodicity was added to simplify thecalculations, and only the interactions from the four nearestneighbors (two on each side) were taken in account. B Phase shiftand amplitude changes (compared to the reference values obtainedfor the hair standing alone) calculated from the simple model ofinteractions presented in A and explained in the text. These changesare roughly those observed experimentally by Shimozawa et al.(1998)
743

independently moving trichobothria. Not being coupledis an advantage here because it preserves the differencein response between the hairs of a group. It results in anenlarged overall working range and range of maximumsensitivity in regard to both input frequency and inputamplitude, and maybe also flow direction in some cases.However, our study does not exclude viscous couplingfor arrays of sensory hairs of other animals.
Further implications
Our model also provides a good approximation ofsome results observed for cricket cercal hairs. Thesehairs have small spacings (100 lm to 200 lm; s/d = 5to 20) and are not ordered with respect to their length(Shimozawa et al. 1998). This implies that short hairsclosely surrounded by a forest of longer hairs shouldexperience strong coupling, especially at low frequen-cies. The present theoretical analysis based on inter-acting hair pairs is not valid for the multiple hairs onthe cricket cercus. However, using the same method asderived for two hairs, it is possible to deduce thecoupling correction for a group of three or four ormore hairs by simply solving the required number ofno-slip conditions on the hairs. If, for example, weapproximate the hair arrangement environment to bean infinite, periodic, linear array of hairs, with shorthairs alternating with long hairs (see the cartoon inFig. 8A) we can easily find the coupling coefficientssimilar to those presented in Table 1. However, inaddition to D0 (standing for the influence of the twoclosest neighbors, one on each side of the hair) thesecoefficients will now include a quantity D¢0 representingthe interaction of the two second-closest neighboringhairs, with the effect of those even further away beingneglected. With this simple scheme and using a spacingof 150 lm and hair length of 1,000 lm and 300 lm, we
can roughly reproduce (see Fig. 8B) the unexpecteddecrease of the hair deflection angle (30 – 40% ofamplitude decrease) and the phase shift at low fre-quencies for the smallest hairs. Moreover, because thedisturbance of short hairs is irrelevant for the dynamicsof long hairs (see Table 1, coupling coefficient forL1 > L2), they experience a weaker coupling as ob-served experimentally by Shimozawa et al. (1998). Theanalytic and experimental procedures of the presentstudy can be applied to a large variety of situationsprovided that the spacing between hairs is large enoughcompared to hair diameter, and provided also that onecan analytically or numerically evaluate the perturba-tion of the flow induced by the hairs.
Acknowledgments B.B. gratefully acknowledges the funding re-ceived from the Ecole Normale Superieure (45 rue d’Ulm 75005Paris, France) to pursue this investigation in the Department ofNeurobiology and Behavioral Sciences (FGB) at Vienna Univer-sity. We also thank the Austrian Science Foundation (FWF) forpartial support through project P 12192 to FGB and two refereesfor valuable comments on the manuscript.
Appendix: Unsteady, low Reynolds number flow in thefar field of a cylinder immersed in an oscillating fluidmedium
In the far field (say at radial distances 10 d – 20 d) of aflow oscillating at frequency f normal to the axis of along cylinder of diameter d, the velocity, length and timescales that characterize the flow are v¥ (the far fieldmaximum velocity amplitude), n ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
l=q2pfp
¼ffiffiffiffiffiffiffiffiffiffiffiffiffi
m=2pfp
(a viscous length scale), and T ¼ 1=2pf (a timescale based on the flow oscillation frequency). Usingthese scales, the dimensionless vector form of the Na-vier-Stokes equation describing the flow is given by:
@V@sþ v12pf n
V ~rV� �
¼ ~r2V � ~rP ; ð19Þ
where the following definitions apply: V=v/v¥,P = (p � p0)/(q v¥ 2pn f) with p0 denoting an arbitraryreference value for pressure, s = t 2p f, and ~r ¼ nr:Because the scaling employed guarantees that each of thequantities @V =@s; V ~rV
� �
; ~r2V and ~rP in Eq. 19 is oforder unity, the value of the parameter C ¼ v1=2pf n ¼v1=
ffiffiffiffiffiffiffiffiffiffi
m2pfp
solely determines the relative magnitude ofthe inertia terms in the momentum balance. Two thingsshould be mentioned about this scaling analysis: (a) it isvalid even if the cylinder oscillates in the flow provided itsoscillation amplitude, A, is such that A/n � 1, a condi-tion that is satisfied in this work; (b) it is only approxi-mate, serving principally to provide qualitative guidancefor establishing the relative magnitudes of the terms inthe momentum equation in the far field flow.
Figure 9 shows approximate maximum allowablevalues for v¥ or, equivalently, Red ¼ v1d=m plotted as afunction of flow oscillation frequency f to ensure thatC < 0.1. (Note that the characteristic velocity in this
Fig. 9 Approximate maximum allowable far-field velocity [ v¥]max
(in m/s) and corresponding Reynolds number ½Red �max ¼½v1�maxd=m as a function of the flow oscillation frequency f to
ensure that the criterion parameter C ¼ v1=2pf n ¼ v1=ffiffiffiffiffiffiffiffiffiffi
m2pfp
isless than 0.1
744

particular definition of the Reynolds number is the far-field velocity v¥ as opposed to the relative velocity Vr
defined in the text.) In the calculations leading to theseplots, we have set d =10 microns and m =1.57·10�5 m2/s, corresponding to a trichobotrium in air at 27�C. Theplots suggest that for C to be less than 0.1 over the entirerange 40 – 200 Hz, it is necessary that v¥ £ 0.06 m/s or,equivalently, that Red £ 0.04. However, for C to be lessthan 0.1 in the range 100 – 200 Hz, it is only necessarythat v¥ £ 0.1 m/s or, equivalently, that Red £ 0.06.
In this study the far field velocity, v¥, ranged from0.03 m/s to 0.3 m/s, approximately, corresponding to avalue of the Reynolds number, Red, ranging from 0.02 to0.2. We thus find C £ 0.1 over a large range of fre-quencies and, as a consequence, we neglect the influenceof the inertia terms in Eq. 19 to solve the followingsimplified momentum equation:
@V@s¼ ~r2V � ~rP : ð20Þ
In this equation, the time rate of change of fluidmomentum is balanced by pressure and viscous forces,convection terms being negligible. (Indeed, a posteriorinumerical estimates of the inertia and time-dependentterms, obtained from solutions of Eq. 20, confirm thatthe former are an order of magnitude smaller than thelatter in the far field, even for velocities as high asv¥ = 0.3 m/s at frequencies as low as f = 40 Hz.)
Using the theory of Stokes (1851), it is possible tosolve Eq. 20 to obtain an expression for the far-field airvector velocity, v, around a hair. The hair is approxi-mated as a straight, long cylinder, of length L andeffective diameter d such that L/d �1, translating backand forth at speed vh in an oscillating air flow of speedv¥. The approximation that the hair uniformly trans-lates back and forth, as opposed to oscillating aroundits base, is allowed by the small deflection angle of thehair. The expression obtained for the air vector velocitycan be written in terms of its Cartesian components (vx,vy) at any (r,w) location on a cylindrical coordinate gridoriginating on the hair axis. From a knowledge of thevelocity components, and using Eqs. 4 and 5 in thetext, it is straightforward to derive correspondingexpressions for the x- and y-components of D whichaccount for the distortion of the oscillating air flowby the hair. These expressions are given below interms of two dimensionless parameters, g=r/d andk ¼ ð1þ iÞðd=2
ffiffiffiffiffi
2npÞ; and the modified Bessel functions
of the second order K0, K1 and K2. (Note that,above i ¼
ffiffiffiffiffiffiffi
�1p
and below K1‘ denotes the first deriv-
ative of K1.)
Dx ¼v1 � v�xv�h � v1
¼ K2ðkÞK0ðkÞ
1
4g2þ 2K
01ð2kgÞ
K0ðkÞ
� �
sin2ðwÞ
þ K2ðkÞK0ðkÞ
1
4g2þ K1ð2kgÞ
kgK0ðkÞ
� �
cos2ðwÞ; ð21Þ
Dy ¼v�y
v�h � v1¼ K2ðkÞ
K0ðkÞ1
4g2� K2ð2kgÞ
K2ðkÞ
� �
sinð2wÞ: ð22Þ
References
Barth FG (2002) A spider’s world. Senses and behavior. Springer,Berlin Heidelberg New York, pp 394
Barth FG, Holler A (1999) Dynamics of arthropod filiform hairs.V. The response of spider trichobothria to natural stimuli. PhilTrans R Soc Lond B 354:183–192
Barth FG, Wastl U, Humphrey JAC, Devarakonda R (1993)Dynamics of arthropod filiform hairs. II. Mechanical propertiesof spider trichobothria (Cupiennius salei KEYS.) Phil Trans RSoc Lond B 340:445–461
Barth FG, Humphrey JAC, Wastl U, Halbritter J, Brittinger W(1995) Dynamics of arthropod filiform hairs. III. Flow patternsrelated to air movement detection in a spider (Cupiennius saleiKeys.). Phil Trans R Soc Lond B 347:397–412
Batchelor GK (1967) Introduction to fluid dynamics. CambridgeUniversity Press, Cambridge
Brittinger W (1998) Trichobothrien, Medienstromung und dasVerhalten von Jagdspinnen (Cupiennius salei, Keys.). Thesis,University of Vienna
Cheer AYL, Koehl MAR (1987a) Paddles and rakes: fluid flowthrough bristled appendages of small organisms. J Theor Biol129:17–39
Cheer AYL, Koehl MAR (1987b) Fluid flow through appendagesof insects. IMA J Math Appl Med Biol 4:185–199
Devarakonda R, Barth FG, Humphrey JAC (1996) Dynamics ofarthropod filiform hairs. IV. Hair motion in air and water. PhilTrans R Soc Lond B 351:933–946
Humphrey JAC, Devarakonda R, Iglesias J, Barth FG (1993)Dynamics of arthropod filiform hairs. I. Mathematical model-ling of the hair and air motions. Phil Trans R Soc Lond B 340:423–444. See also Errata (1998) 352:1995
Humphrey JAC, Barth FG, Voss K (2001) The motion-sensinghairs of arthropods: using physics to understand sensory ecol-ogy and adaptive evolution. In: Barth FG, Schmid A (eds) Theecology of sensing. Springer, Berlin Heidelberg New York, pp105–125
Humphrey JAC, Barth FG, Reed M, Spak A (2003) The physics ofarthropod medium-flow sensitive hairs: biological models forartificial sensors. In: Barth FG, Humphrey JAC, Secomb TW(eds) Sensors and sensing in biology and engineering. Springer,Berlin Heidelberg New York, pp 129–144
Nicklaus R (1965) Die Erregung einzelner Fadenhaare von Peri-planeta americana in Abhangigkeit von der Große und Rich-tung der Auslenkung. Z vergl Physiol 50:331–362
Panton RL (1984) Incompressible flow. Wiley, New YorkReißland A, Gorner P (1985) Trichobothria. In: Barth FG (ed)
Neurobiology of arachnids. Springer, Berlin Heidelberg NewYork, pp 138–161
Schlichting H (1979) Boundary layer theory. McGraw-Hill, NewYork
Shimozawa T, Kanou M (1984a) Varieties of filiform hairs: rangefractionation by sensory afferents and cercal interneurons of acricket. J Comp Physiol A 155:485–493
Shimozawa T, Kanou M (1984b) The aerodynamics and sensoryphysiology of range fractionation in the cercal filiform sensillaof the cricket Gryllus bimaculatus. J Comp Physiol A 155:495–505
Shimozawa T, Kumagai T, Baba Y (1998) Structural scaling andfunctional design of the cercal wind-receptor hairs of cricket. JComp Physiol A 183:171–186
Shimozawa T, Murakami J, Kumagai T (2003) Cricket windreceptors: thermal noise for the highest sensitivity known. In:Barth FG, Humphrey JAC, Secomb TW (eds). Sensors andsensing in biology and engineering. Springer, Wien New York,pp 145–157
745

Stokes GG (1851) On the effect of the internal friction of fluids onthe motion of pendulums.Trans Camb Phil Soc 9: 8ff (reprintedin: Mathematical and Physical Papers, vol III, pp 1–141,Cambridge University Press 1901)
Tautz J (1979) Reception of particle oscillation in a medium—anunorthodox sensory capacity. Naturwissenschaften 66:452–461
Vogel S (1983) How much air passes through a moth antenna? JInsect Physiol 29:597–602
746