
Validation and Verification of the Navier-Stokes Solutions Obtained from the Applications of the...
61
American Institute of Aeronautics and Astronautics 1 Validation and Verification of the Navier-Stokes Solutions Obtained from the Applications of the Integro-differential Scheme Frederick Ferguson 1 , Mookesh Dhanasar 2 , and Nasstaja Dasque 3 Center for Aerospace Research, NCAT, Greensboro, NC 27411, USA The goal of this research effort is to improve the efficiencies of Computational Fluid Dynamic tools by focusing on the development of a robust, efficient, and accurate numerical framework. What is most desirable is a framework that is capable of solving a variety of complex fluid dynamics problems over a wide range of Reynolds and Mach numbers, and one with the potential to overcome several limitations of well-established schemes. Preferable, is a computational framework that might minimize the dispersive and dissipative tendencies of traditional numerical schemes. To this end, a new scheme, termed the ‘Integro-Differential Scheme’ (IDS) and sometimes called the ‘Method of Consistent Averages’ (MCA), Ref [1-2], is proposed. The MCA numerical procedure developed herein is based on two fundamental types of control volumes; namely, spatial cells and temporal cells. A typical spatial cell is developed from eight neighboring nodes, whereas, a typical temporal cell is developed from the centroid of the eight neighboring spatial cells. Further, each cell in this analysis, acts as a control volume on which the Navier- Stokes equations are integrated. The final solution at a single node is then developed from a system of carefully crafted control volumes. This paper describes the results obtained from applying the IDS method to a set of selected 2D fundamental fluid dynamic problems; namely, (1) the Hypersonic Leading Edge problem, (2) the incompressible Lid Driven Cavity problem, (3) the Shock Boundary Layer Interaction Problem and (3) the Isolator Pseudo-Shock Train problem. Nomenclature A = amplitude of oscillation a = cylinder diameter C p = pressure coefficient Cx = force coefficient in the x direction Cy = force coefficient in the y direction c = chord dt = time step Fx = X component of the resultant pressure force acting on the vehicle Fy = Y component of the resultant pressure force acting on the vehicle f, g = generic functions h = height i = time index during navigation j = waypoint index K = trailing-edge (TE) non-dimensional angular deflection rate 1 Professor, Mechanical Engineering Department, NCAT, and AIAA Associate Fellow. 2 Research Associate, Mechanical Engineering Department, NCAT, and AIAA Member. 3 Graduate Student, Mechanical Engineering Department, NCAT, and AIAA Member.
Transcript of Validation and Verification of the Navier-Stokes Solutions Obtained from the Applications of the...

American Institute of Aeronautics and Astronautics
1
Validation and Verification of the Navier-Stokes Solutions
Obtained from the Applications of the
Integro-differential Scheme
Frederick Ferguson 1
, Mookesh Dhanasar2, and Nasstaja Dasque
3
Center for Aerospace Research, NCAT, Greensboro, NC 27411, USA
The goal of this research effort is to improve the efficiencies of Computational
Fluid Dynamic tools by focusing on the development of a robust, efficient, and
accurate numerical framework. What is most desirable is a framework that is
capable of solving a variety of complex fluid dynamics problems over a wide range
of Reynolds and Mach numbers, and one with the potential to overcome several
limitations of well-established schemes. Preferable, is a computational framework
that might minimize the dispersive and dissipative tendencies of traditional
numerical schemes. To this end, a new scheme, termed the ‘Integro-Differential
Scheme’ (IDS) and sometimes called the ‘Method of Consistent Averages’ (MCA),
Ref [1-2], is proposed. The MCA numerical procedure developed herein is based on
two fundamental types of control volumes; namely, spatial cells and temporal cells.
A typical spatial cell is developed from eight neighboring nodes, whereas, a typical
temporal cell is developed from the centroid of the eight neighboring spatial cells.
Further, each cell in this analysis, acts as a control volume on which the Navier-
Stokes equations are integrated. The final solution at a single node is then
developed from a system of carefully crafted control volumes. This paper describes
the results obtained from applying the IDS method to a set of selected 2D
fundamental fluid dynamic problems; namely, (1) the Hypersonic Leading Edge
problem, (2) the incompressible Lid Driven Cavity problem, (3) the Shock
Boundary Layer Interaction Problem and (3) the Isolator Pseudo-Shock Train
problem.
Nomenclature
A = amplitude of oscillation
a = cylinder diameter
Cp = pressure coefficient
Cx = force coefficient in the x direction
Cy = force coefficient in the y direction
c = chord
dt = time step
Fx = X component of the resultant pressure force acting on the vehicle
Fy = Y component of the resultant pressure force acting on the vehicle
f, g = generic functions
h = height
i = time index during navigation
j = waypoint index
K = trailing-edge (TE) non-dimensional angular deflection rate
1 Professor, Mechanical Engineering Department, NCAT, and AIAA Associate Fellow.
2 Research Associate, Mechanical Engineering Department, NCAT, and AIAA Member. 3 Graduate Student, Mechanical Engineering Department, NCAT, and AIAA Member.

American Institute of Aeronautics and Astronautics
2
I. Introduction
historic review of the computer industry indicated that it has completed four generations and is now entering its
fifth generation1-6
. Engineers have labeled computers that use the vacuum tubes as the first generation
computers, and those that used the transistors and diodes as the second generation of computers. The integrated
circuits (ICs) ushered in the third generation computers. Currently we are enjoying the benefits of the fourth
generation computers that were made possible thanks to the development of micro-processors1-6
.
Arguably, the fifth generation of computers is already with us. The development of integrated „software and
multiprocessors‟, of the type facilitated by field programmable gate arrays (FPGA) and others, are ushering a new
generation of „Peta-scale‟ computers. In principle, computer engineers have developed a common consensus on the
path toward the fifth generation of computer based systems. This path involves the global unification of software
components that interacts with a series of hardware coprocessors. The fifth generation of computers is expected to
deliver performances in the order of petabytes (storage capacity in the order of 10 million or more gigabytes) and
pataflops (one quadrillion floating point operations per second). In the US, the National Science Foundation and
DARPA have initiated funding for the development of such computers. In fact, DARPA has contracted with IBM
through the PERCS (Productive, Easy-to-Use, and Reliable Computer System) program. Other countries, such as,
China, Germany and Japan, have similar programs. The immediate computational focus of the „Peta-scale‟
computers under development will be on weather and climate simulations, nuclear and quantum chemistry
simulations, and cosmology and fusion science simulations1-6
.
The motivation of the research program described herein is targeted towards the development of a
Computational Fluid Dynamic tool that seeks to maximize the benefits of future „Peta-scale‟ computers2.
A: Historic Perspective of CFD as an industrial design tool
A historic view of the Fluid Dynamic industry, especially, as it relates to the aerospace industry, indicates that
there are at least three major breakthroughs in CFD. The first breakthrough occurred in the 1950‟s and 1960‟s.
During this period, numerical methods and grid generation techniques were merged into the formation of
Computational Fluid Dynamics (CFD) as a special branch of fluid mechanics. However, in the 1950s and 1960s
CFD did not play a dominant role, mainly due to the lack of computational facilities. Nevertheless, numerical
methods were developed and applied to 2D flows. In those days, the results were always supported by experimental
data, thus validating the importance of CFD1-6
.
A second breakthrough in CFD occurred in the 1970s, when the science of orthogonal surface-fitted structured
grids was introduced. During that time, the storage and speed of selected and limited digital computers were
sufficient to conduct CFD studies on flow problems of practical interest. Using structured surface-fitted grids, the
computations of flow over airfoils and wings became accurate, affordable and efficient. This breakthrough led to
remarkable improvements in the design and performance of fixed wing aircrafts.
The third breakthrough in CFD occurred in the 1980s and 1990s. During this time, the computer had fully
penetrated the industrial market and was well on its way to making it into every home. Additionally, there were
remarkable improvements in both computational speed and storage. At this time, numerical algorithms and grid
generation techniques were expanded and included unstructured grids on realistic aircraft configurations. The
successful aerodynamic analysis of the full size aircraft configurations using CFD was demonstrated3. It was also in
the 1990s that CFD analysis became integrated into other industries, such as, the automobile, civil and
environmental industries.
CFD as a design tool is playing a leading role wherever a flow field is being analyzed. In fact, CFD has
significantly influenced the way engineers analyze problems and conduct design. However, not withstanding these
successes, there are still great CFD challenges remaining today1-2
.
B: The Challenges of the CFD Industry
Typically, any problem facing the CFD engineer can be solved through the integrated use of the following three
elements7-12
:
(i) the available or intended computational hardware,
(ii) an appropriate form of the conservation laws and their constitutive relations, and
(iii) a specified set of computational grid points.
As such, to understand the challenges facing the CFD industry, one must put these three elements in proper
perspective.
A

American Institute of Aeronautics and Astronautics
3
The computational hardware of interest to this research was described in the introduction section of this paper.
The motivation of the research program described herein is geared towards the development of a Computational
Fluid Dynamic tool that seeks to maximize the benefits of future „Peta-scale‟ computers.
The conservation laws and their constitutive relations are usually specified by the CFD designer. In most
instances, these equations are chosen based on the capability of the available computational hardware and in the case
of industrial software, the available turbulence model. The appropriate form of the conservation laws and their
constitutive relations of interest to this research is the Navier-Stokes equation with the Reynolds Stress Model.
Designers are currently focusing on problems where turbulence has the dominant effect and problems where the
traditional two-equation models are no longer adequate. Clearly no proper evaluation of the merits of different
turbulence models can be made unless the discretisation error of the numerical algorithm is known. As such, grid
sensitivity studies are crucial for all turbulence model computations.
C: Computational Grid Points
The successful analysis of any CFD design problem can be traced back to the successful development of its grid
structure. As such, in order to appreciate the challenges facing the CFD Industry one must take a critical look at the
grid generation techniques available. Typically, the grid generation procedure is left up to the CFD designer, who
has one of two choices, structured or unstructured grids methods.
C1: Structured Grid Methods
Structured grid methods take their name from the fact that the grid is laid out in blocks of regular repeating
pattern. These grids utilize quadrilateral elements in 2D and hexahedral elements in 3D. Although the element
topology is fixed, the grid can be shaped to be body fitted through stretching and twisting of the block. In reality,
structured grid tools utilize sophisticated elliptic equations to automatically optimize the shape of the mesh for
orthogonality and uniformity. Structured grids can be arranged in multiple blocks, with and without overlapping.
Refer to Figure 1. Structured grids enjoy a considerable advantage over its unstructured counterpart, in that they
allow a high degree of control. In addition, hexahedral and quadrilateral elements, tolerates a high degree of
skewness and stretching without significantly affecting the solution accuracy in the case of well behaved flowfields.
The major drawback of structured block grids is the time and expertise required to lay out an optimal block structure
for industrial size model. Grid generation times are usually measured in weeks if not months.
Figure 1: Structured Overlapping Grids [3]. Figure 2: Unstructured Grids [3].
C2: Unstructured Grid Methods
Unstructured grid methods utilize an arbitrary collection of elements to fill the domain. Due to the fact that the
arrangement of the elements has no discernible pattern, the mesh is called unstructured. Refer to Figure 2. These
types of grids typically utilize triangles in 2D and tetrahedra in 3D. As with structured grids, the elements can be
stretched and twisted to fit the domain. These methods are usually automated. Given a good CAD model, a good
designer can automatically place triangles on arbitrary surfaces and tetrahedra in the arbitrary volume with very little

American Institute of Aeronautics and Astronautics
4
effort. The major advantage of unstructured grid methods is that they enable the solution of very large and detailed
problems in a relatively short period of time. Compared to structured grids method, unstructured grid generation
times are usually measured in minutes or hours.
However, the major drawback of unstructured grids is the lack of user control when laying out the mesh.
Typically user involvement is limited to the boundaries. In addition, triangle and tetrahedral elements are resistant
to stretching and twisting, therefore, the resulting grids are isotropic, with all elements having roughly the same size
and shape. This is a major problem when trying to refine the grid in a local area, often the entire grid must be made
much finer in order to get the point densities required locally. Another drawback of this method is its reliance on
geometric input or CAD data. Typically, most meshing failures are due to some minuscule error in the geometric
input. Unstructured flow solvers typically require more memory and have longer execution times than structured
grid solvers on a similar mesh.
D: Potential Benefits of Cartesian Grid Flow Solvers
The pros and cons of the state-of-the-art in grid generation science outlined in section C, and the potential
computational capabilities of the next generation computers outlined in section A provide a significant opportunity
for the CFD industry13-16
. Opportunities exist to overcome the existing challenges of grid generation and to
aggressively tackle the direct simulation of turbulent dominated flows over complex configurations13-16
.
Potentially, significant reductions in aircraft design cycle times through the automated generation of structured
grids with optimum surface resolution can be achieved. These reductions will not come from increased reliance on
user interactive methods, but instead from methods that fully automates and incorporates themselves into „black
boxes‟. In comparison with unstructured grid methods, 3D Cartesian grid approaches are still in its infancy.
However, the recent development of automated Cartesian grid generation techniques are quite promising1-2
. Our
research is targeted at furthering the development of Cartesian methods so that they can become key elements of a
completely automatic and coupled grid generation and flow solution procedure1-2
.
Cartesian approaches are of course beset with their own unique difficulties. The most challenging is the
removal of the body-fitted grid constraint. This allows the Cartesian hexahedra used to discretize the flowfield and
to intersect the surface in an arbitrary manner. Successful research into the development of robust procedures for
the efficient creation and distribution of the hexahedra will produce an automatic procedure for Cartesian grid
generation. Another potential benefit of this research is the ability to solve complex turbulent flow fields with RSM
over industrial size configurations afforded by the simplicity of Cartesian grids.
II. Current Research Focus
The immediate goal of this research is focused on the development of a robust, efficient, and accurate numerical
framework that is capable of solving a variety of complex fluid dynamics problems on Cartesian grids1-2
. The IDS
scheme is built with extensive physics considerations and has the following features:
i. The numerical scheme is based on the solution of the integral form of the Navier-Stokes equation. This
approach focuses on the benefits of the traditional finite volume and finite difference schemes, and therefore
guarantees the conservation properties throughout the domain by the first and the formulation simplicity by the
latter.
ii. The Cartesian grid generation procedure is used to develop spacial and temporal control volumes upon which
the integral form of the physical conservation laws are applied. As such, the scheme has the potential to satisfy
the physical realities of fluid fluxes for both time and space.
iii. Accounting of the mass, momentums, and energy fluxes (both within the control volume and through its
surfaces) is conducted with the aid of the mean value theorem, rather than the traditional extrapolation or
interpolation of the node‟s information from neighboring cells.
iv. The accuracy and efficiency of the scheme is demonstrated on flows with rectangular boundries.
A: The Governing Equations
The equations that govern fluid flows and the associated heat transfer are the continuity, momentum and energy
equations. These equations were independently constructed by Navier (1827) and Stokes (1845), and are referred to
as the Navier-Stokes equations. In this research, the integral forms of the Navier-Stokes equations (1–3) are of
paramount importance. The continuity, momentum and energy equations are listed as follows:

American Institute of Aeronautics and Astronautics
5
v s
0sdVdvt
(1)
sdsPdVsdVdvVt
ssv
ˆ.
(2)
ssssv
sdqsdVsdVPsdVEEdvt
... (3)
In Equations (1) the symbols, tv,, , represent the density, the volume of a control fluid element, and time,
respectively. In addition, the symbols, V , sd and q , in equations (1), (2) and (3) represent the fluid velocity, the
surface of the control volume and the local heat transfer rate. In this research, fluid velocity and the surface element
are described through the use of vector quantities as follows:
kwjviuV (4)
kdxdyjdxdzidydzsd (5)
and
kqjqiqq zyx (6)
In equations (2) and (3), the symbol, P, represents the pressure and the symbol, ,ˆ represents a symmetric tensor that
defines the various components of the local viscous stresses. This symmetric tensor is described by the equation:
zzzyzx
yzyyyx
xzxyxx
ˆ (7)
where the symbols of the six independent components, zyzxyxyyxyxx ,,,,, and zz , are the local shear stress
that were defined in equation (7) as follows:
x
uVxx 2.
3
2 (8)
x
v
y
uyxxy (11)
y
vVyy 2.
3
2 (9)
x
w
z
uzxxz (12)
z
wVzz 2.
3
2 (10)
z
v
y
wzyyz (13)
The symbols, yx qq , and zq , in equation (3) represent the components of the heat flux vector in the x- , y-, and z-
directions, respectively. These components are defined by Fourier‟s law, and expressed mathematically as,

American Institute of Aeronautics and Astronautics
6
z
Tkq
y
Tkq
x
Tkq
z
y
x
(14)
The symbols, P and E, in equations (2) and (3) are defined as follows:
2
222 wvuTCE
RTP
v
(15)
where R is the universal gas constant. The symbols, and k, represent the viscous and thermal properties of the
fluid of interest. In this analysis, the viscosity of the fluid is evaluated through the use of Sutherland‟s law7-8
,
110T
110T
T
T23 /
(16)
where the symbols, and T , represent the freestream dynamic viscosity and temperature. In the case of 3D
aerodynamic analysis, the Navier-Stokes equations (1)–(3) defined above can be treated as a closed system of five
equations relative to five unknowns. In this analysis, the unknowns are the following five primitive flow field
variables: Twvu ,,,, . The immediate goal of this research is to develop an explicit method that
solves the Navier-Stokes system of equation on a set of Cartesian grids in which arbitrary objects are immersed.
III. The Integro-Differential Scheme (IDS)
A typical fluid flow is represented by a rectangular domain1-2
. This spatial computational domain is further
divided into a collection of elementry cells, herein called „spatial‟ cells. These cells are chosen as infinitesimal
rectangular prisms, with unit normal, ñ, in the x, y, and z directions. The dimensions of each side of a cell are
defined by dx, dy, and dz, respectively. Refer to Figure 3. Further, a given cell is defined locally by six independent
surfaces, and each surface defined by four points or nodes in a given plane. Additionally, plus and minus notations
are use to define the unit normal, ñ, with respects to each surface. Next, in the case of a 2D domain, (the 3rd
dimension is held fixed) each surface of a given cell is defined by four nodes; namely, nodes-1, nodes-2, nodes-3
and nodes-4. Figure 3 illustrates the plus and minus notations for the surfaces with normal to the z-direction. It is of
interest to note that the use of the object oriented programming concept makes it very convenient to use identical
surface objects in the x and y directions.
Analogous to „spatial‟ cells, the concept of „temporal‟ cells are also introduced. The „temporal‟ cells are
defined as rectangular prisms formed from the centroids of eight neighboring „spatial‟ cells. Finally, a control fluid
volume is defined, as a collection of eight „spatial‟ cells and one temporal cell. A typical control volume is
illustrated in Figure 4. Each term in the Navier-Stokes equations (1–3) are applied systematically to each spatial
cell. The mean value theorem is invoked and a set of algebraic equations representing the rate of change of mass,
momentum, and energy associated with each spatial cell is derived. However, the rates of change of the time-fluxes
are not associated with any grid point, but with the „spatial‟ cell. When the spatial cells are pieced together to form
a temporal cell within the control volume, the arithmetic average of the rates of change within the temporal cell then
defines rates of change at the ijk-point of interest.
It is of interest to note that the plus and minus surfaces in each direction is adequate to evaluate the invicid
fluxes. However, two additional and adjacent surfaces in each direction are needed for evaluating the viscous terms.
In this analysis, these surfaces are denoted as the plus-plus and minus-minus surfaces, and are treated in the manner
described earlier.

American Institute of Aeronautics and Astronautics
7
Figure 3: Spatial Cell with Notation at Surface Nodes. Figure 4: Illustration of Control Volume.
IV. Preliminary Results
As described earlier in this paper, the immediate goal of this research effort is to develop a computational tool
that accurately solves the Navier-Stokes equations in the Cartesian system of coordinates. In this section, the
following three standard CFD problems are solved to demonstrate the validity of the new computational tool:
i. Flow over a flat plate at Subsonic, Transonic and Hypersonic Conditions
ii. Incompressible and Supersonic Lid Driven Cavity flow Problem
iii. Shock Train Problem
The solution procedure adopted during the numerical simulation of these problems is as follows:
i. The physical domain of the problem is defined in Cartesian Coordinates.
ii. The freestream parameters of interest ( , M, Re, and Pr) are mapped to fit the Navier-Stokes equations
requirements and the physical domain described in Section I.
iii. The boundary conditions are assigned in accordance with Method of Consistent Averages methodology.
iv. The solution grid and initial solution are auto-generated.
v. The solution data is extracted from the 3D domain through planes and lines at the locations of interest.
A: Hypersonic Flow over a Flat Plate
Consider a developing boundary layer on a flat-plate under supersonic conditions, as illustrated in Figure 5. An
oblique shock wave develops at the leading edge of the flat plate due to the viscous boundary layer effects. Refer to
Figure 6. The occurrence of the boundary layer often provokes dramatic changes in the flow field features, both
qualitatively and quantitatively. Important consequences of this occurrence are the increase in the skin friction
coefficient and the shear stresses inside the boundary layer region. Moreover, dissipation of kinetic energy within
the boundary layer can cause high flow-field temperatures and thus high heat-transfer rates. The supersonic flow
over a flat plate is a classical fluid dynamic problem, and it has received considerable attention from many
researchers; including Anderson7, Akwaboa
17, MacCormack
18 and Rasmussen
19.
The results of this study are illustrated in Figures 6–10. Figure 6 illustrates a contour plot of the pressure
distribution over the plate. Evidence of a shock wave that developed at the leading edge of the plate as a result of
the boundary layer can be clearly detected in Figure 6. In an effort to validate the numerical solution, a grid
independence study was carried out on four sets of Cartesian grids; namely, a 101 by 101, 201, 201, 301 by 301 and
a 401 by 401 rectangular grid systems, respectively. The residual as a function of the number iterations are plotted
in Figure 8, for each grid size. In each case, the results were consistent, the residual error, exponentially decreased
with respects to time. The u-velocity, temperature and pressure data are also presented in Figures 8–10. Figure 10
indicates the accuracy of this method as compared to the available experimental data, Ref5.

American Institute of Aeronautics and Astronautics
8
Figure 5: Hypersonic Boundary Layer7 Figure 6: Pressure distribution in Boundary Layer
Figure 7: The exit Temperature in Boundary Layer Figure 8: Pressure distribution in Boundary Layer
Figure 9: The exit Temperature in Boundary Layer Figure 10: Pressure distribution in Boundary Layer
Shock wave
Iterations
Res
idual
1 5001 10001
10-14
10-12
10-10
10-8
10-6
10-4
10-2
201 by 201 Grid
401 by 401 Grid
101 by 101 Grid 301 by 301 Grid
Frame 001 15 Apr 2010
Non-Dimensional uVelocity
Y
0 0.25 0.5 0.75 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
101 by 101 Grid
401 by 401 Grid
Frame 001 15 Apr 2010
Non-Dimensional Density
Y
0.9 1 1.1 1.2 1.3 1.40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
401 by 401 Grid
101 by 101 Grid
201 by 201 Grid301 by 301 Grid
Frame 001 15 Apr 2010
X
Non-D
imen
sion
alP
ress
ure
0 0.5 11
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
101 by 101 Grid
401 by 401 Grid
201 by 201 Grid
Frame 001 15 Apr 2010

American Institute of Aeronautics and Astronautics
9
B: The Lid Driven Cavity Problem
Consider a 3D incompressible flow field that is confined to a cavity, where the motion in the cavity is generated
by the sliding motion of the fluid at a plane of one of its surfaces. This moving fluid surface generates vorticity
which diffuses inside the cavity. The diffusion effect now becomes the dominant mechanism driving the flow. As
part of the validation studies of the Navier-Stokes code developed herein, the lid driven cavity problem was solved.
Figures 11 and 12 illustrate the results obtained from this IDS procedure, and compare them against the
experimental findings of both Choi & Merkle20
and Vigneron et.al21
.
Figure 11: The x Component Velocity Profile along
the Vertical Centerline of the Cavity
Figure 12: The y Component Velocity Profile along
the Horizontal Centerline of the Cavity
The data presented in Figures 11 and 12 are the steady state solution for the x-component of the velocity on the
vertical centerline and the y-component of the velocity on the horizontal centerline of the cavity. It is of interest to
note that incompressible solutions are obtained without introducing any modifications to the IDS algorithm.
Another perspective of the cavity solution in the form of streamlines is presented in Figures 13. Again, the IDS
solution is compared to the Vigneron et.al21
solution, see Figure 14, for the cavity problem under the same operating
conditions. As observed in these Figures 13 and 14, the IDS solution shows very good agreement with the results of
Vigneron et al21
.
Figure 13: Cavity Streamlines plot of the IDS
Solution Figure 14: Cavity Streamlines plot Vigneron Solution
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-0.3 0.0 0.3 0.5 0.8 1.0
IDS results Choi & Merkle (1995) Vigneron et al. (2008)
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0.00 0.20 0.40 0.60 0.80 1.00
IDS Results Choi & Merkle (1995) Vigneron et al.

American Institute of Aeronautics and Astronautics
10
C: The Shock-Boundary Layer Interaction Problem
Consider the Shock Boundary Layer Interaction problem22, which is one of the standard test problems from
Navier-Stokes solvers. Further, consider the scenario where the shock wave is strong and the incident angle of the
shock wave is also large. In this case, separation occurs at the impingement point. Usually, to resolve the details of
this flow field phenomenon, clustered grids are used in the separation region. However, in the case of the IDS
procedure, no such clustering techniques are used. A rectangular set of grid points; 301 by 601, (approximately
180,901 cells) were used in this study.
In this analysis, the freestream Mach number is set to 3.0, the Reynolds number to 106, the Prandtl number to
0.71 and shock angle, , is set to atan(5.0/7.0) (approximately 40.9256 deg). The problem is solved on a set of
uniform grids. The results of this study are illustrated in Figures 15–18. Figures 15 and 16 presents the distribution
of the x- and y-components of the velocity, with over plots of the velocity field. Figure 17 highlights the normal
pressure distribution at locations of 20%, 25%, 50% and 100% along the length of the plate. On the other hand,
Figure 18 shows the distribution of the pressure and the shear stress along the length of the plate. These results
represent the physical behavior of the flow field.
Figure 15: The x Component Velocity Profile Figure 16: The y Component Velocity Profile
Figure 17: The SBLI Normal Pressure Profile Figure 18: Wall Pressure and Shear Stress Profile
Non-Dim X
Non-D
imY
0 0.5 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1u-Velocity
0.92780.85060.81720.81050.80490.79420.73020.51440.29850.0827
-0.0554
Frame 001 18 Dec 2010
Non-Dim X
Non-D
imY
0 0.5 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1v-Velocity
0.1130
0.0732
0.0333
-0.0066
-0.0465
-0.0863
-0.1262
-0.1661
-0.2060
-0.2458
Frame 001 18 Dec 2010

American Institute of Aeronautics and Astronautics
11
D: The Jet and Cross Flow Interaction Problem
The flow field resulting from a gas that is injected traversely into a supersonic crossflow is encountered in many
aerospace applications, such as, the thrust vectoring of rocket motors, supersonic combustion in scramjets, and the
cooling of gas turbine blades. The flowfield interaction of the jet and the crossflow results in shock waves,
boundary layer separation and recirculation zones23, as illustrated in Figure 19. Typically, a bow show forms ahead
of the injection which interacts with the boundary layer to result in a separation bubble. In addition, the jet core
flow penetrates the boundary layer and terminates in either a normal shock wave or a Mach disk. Directly
downstream of the jet plume a second separation zone develops, refer to Figure 20. In 3D flowfields, horseshoe
vortexes are also formed23.
Figure 19: The Jet-Cross Flow Problem23 Figure 20: Cross flow Velocity and Pressure Profiles
In this analysis, the jet and cross flow interaction problem23 is solved for the conditions prescribed in Ref. 24.
For this study, a rectangular set of grids, 401 by 401, was used. The preliminary results obtained from the use of
IDS procedure are illustrated in Figures 20–22. Figure 20 illustrates a close up of the flow field at the jet injection
zone, whereas, Figure 21 illustrates a stream trace in the entire domain. Figure 22 demonstrates the validity of the
numerical calculations, whereby the pressures at key points in the flow field are recovered.
Figure 21: IDS Jet-Cross Flow Streamlines Figure 22: Computed and Experimental Pressures

American Institute of Aeronautics and Astronautics
12
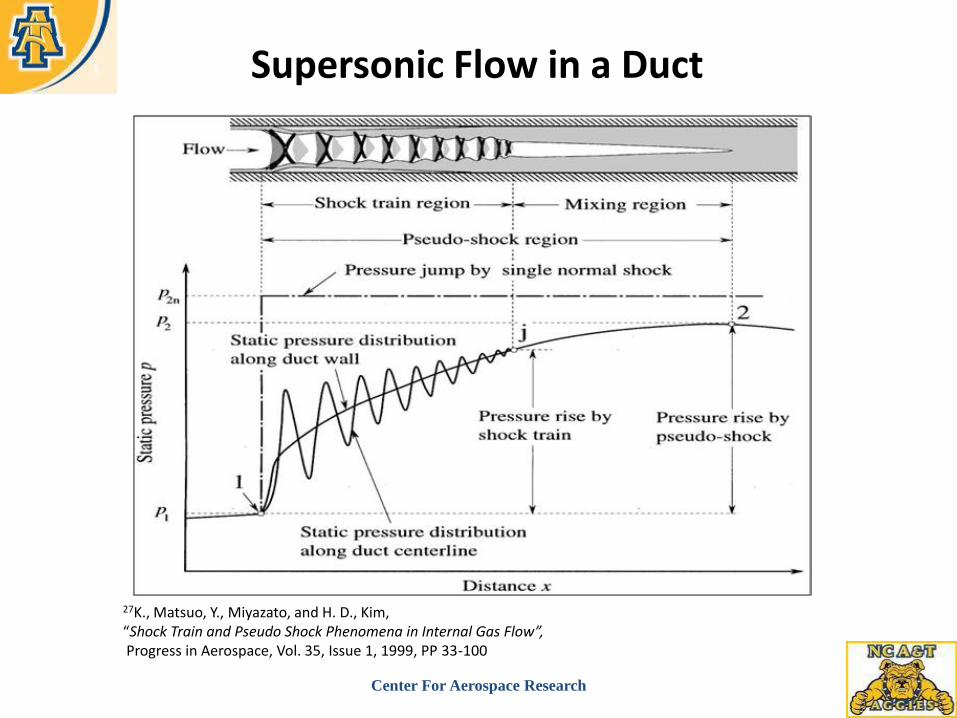
E: The Pseudo Shock Train Problem
A characteristic of supersonic internal flows is the development of a strong shock wave that forms as a result of
the flow interaction with the boundary layer along the wall surface of the device. The shock is bifurcated and a
series of repeated shocks is formed along the flow passage. The number of these shock series and their position in
the flow passage is dependent on the freestream Mach number, the pressure conditions imposed at both the upstream
and downstream locations of the flow passage, the passage geometry, and the wall friction due to viscosity. This
phenomena was described in Om et al25
as „multiple shocks‟, by McCormick18
, as a „shock system‟, and most
recently by Carroll and Dutton26
, and Matsuo27
as a „pseodo-shock train’. Through the interaction region, the flow
can be decelerated from a supersonic flow to a subsonic flow. Figure 23 presents an illustration of the shock train
phenomenon in an internal duct. The shock train is clearly visible and is usually followed by an adverse pressure
gradient region in a long enough duct. The interaction region including both shock train and the subsequent pressure
recovery region is referred to as a „pseudo shock‟27
.
Figure 23: Schematic of Shock Train and Pseudo Shock27
Also presented in Figure 23 is the behavior of the static pressure at the wall and at the center line of the constant
area duct. Examination of this figure revels that the static wall pressure rises at a faster rate in the shock train
region, i.e. between points 1, j, than in the mixing region, i.e. between points j, 2. A similar trend (pressure rise) is
observed in the static pressure distribution along the duct centerline. The oscillations observed in the static pressure
distribution along the duct centerline are due to the presence of the successive shock series or shock train. Beyond
point j no shock exists and the pressures at the wall surface and at the centerline are essentially the same.
The pressure rise between the points 1 and j is caused by the shock train. If the flow is fully subsonic and
uniform at the point j, then the static pressure downstream of this point should decrease due to the frictional effect.
However, it should be noted that the shock train is followed by the “mixing region”, where no shocks exist. The
pressure increase in this region is due in some extent to the mixing of a highly non-uniform profile created by the
shock train. The static pressure reaches its maximum at point 2.
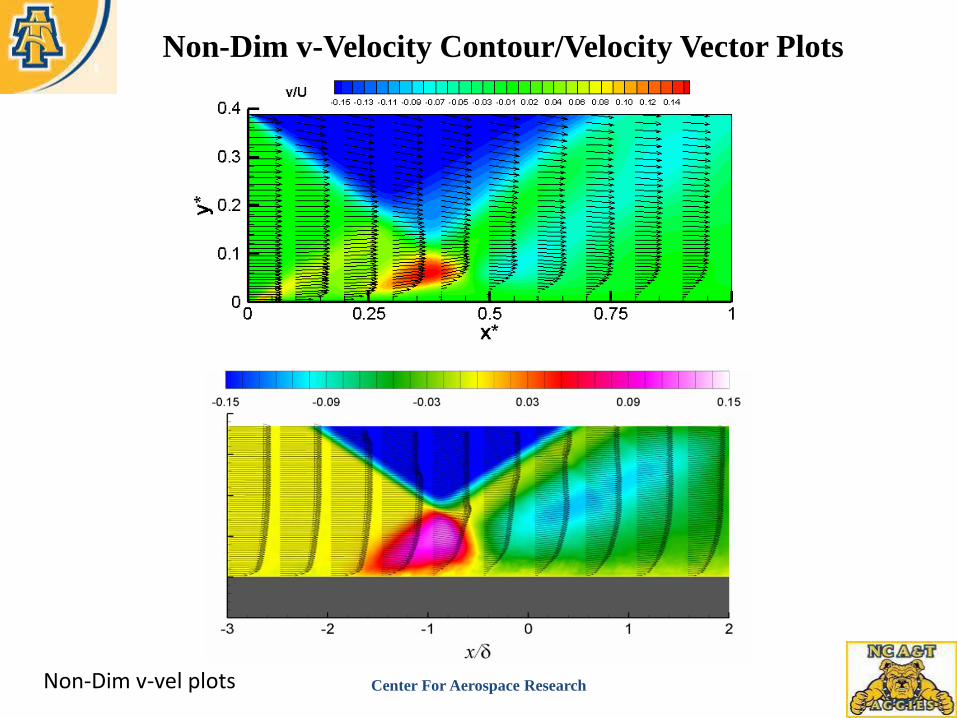
The results of this research effort are compared to the analysis conducted in Ref 28 since the input data are taken
from the same source. Refer to Figure 24. The results of the IDS study as they relate to the density, velocity and
pressure distribution profiles are presented in Figures 25 and 26. Again, it can be seen that the IDS procedure
reproduces the expected flow field behavior.

American Institute of Aeronautics and Astronautics
13
Figure 24: Velocity vectors imposed on density contours, Ref. 28
Figure 25: IDS generated Velocity vectors imposed on density contours
Figure 26: IDS generated pressure contours for the Pseudo-Shock Train Problem
V. Conclusion
In an effort to improve the efficiencies of Computational Fluid Dynamic tools a new numerical computational
scheme/framework has been developed and is introduced. The „Intergo-Differential Scheme‟, IDS is a numerical
procedure based on two fundamental types of control volumes, spatial and temporal cells. This new scheme was
tested and validated on a chosen set of fluid dynamics problems and the results presented above. These problems
are listed as follows: the Hypersonic Leading Edge problem, the incompressibility Lid Driven Cavity problem, the
Shock Boundary Layer Interaction Problem, and the Isolator Pseudo-Shock Train problem. The solutions
obtained for these problems using the IDS procedure showed very good agreement with the physical expectations

American Institute of Aeronautics and Astronautics
14
and experimental data for each problem. A survey of CFD literature indicated that a large percentage of the
compressible flow field solvers encountered convergence difficulties when utilized to solve incompressible flow
problems29
. In an effort to demonstrate the capability of the IDS scheme the incompressible lid driven cavity
problem was addressed. The IDS scheme delivered excellent results for this problem without any convergence
difficulties. In addition, the IDS scheme was used to solve a pseudo-shock train problem which is considered
among one of the most challenging problems encountered in computational fluid dynamics29
. Once again, the
IDS procedure predicted excellent results. In conclusion, the solutions obtained for compressible external and
internal flows, and the incompressible lid driven cavity problem validates the IDS procedure as a robust, efficient,
and capable scheme that can solve a variety of complex fluid dynamics problems.
Acknowledgments
This work has been partially sponsored by the following agencies; AFRL/WPAB and NASA Glenn Research
Center. In addition, special appreciation is extended to Mr. Donnie Saunders of the Air Vehicles Directorate at
Wright Patterson Air Force Base and Dr. Isaiah M. Blankson of NASA Glenn Research Center for their
encouragement and support of this project.
References 1Frederick Ferguson, Gafar Elamin and Mookesh Dhanasar; A Method of Consistent Averages for the Computational
Solution to the Fluid Dynamic Equations, 5th Conference on Computational Fluid Dynamic, CFD 2010. 2Frederick Ferguson, Gafar Elamin “A numerical solution of the NS equations based on the mean value theorem with
applications to aerothermodynamics”, The 9th International Conference on Advanced Computational Methods and Experimental
Measurements in Heat and mass Transfer, Wessex Institute of Technology, New Forest, UK , July 2006. 3http://www.csm.ornl.gov/workshops/Petascale07/, Workshop on Software Development Tools for Petascale Computing, 1-2
August 2007, Washington, DC 4Jack J. Dongarra, and David W. Walker, THE QUEST FOR PETASCALE COMPUTING, HIGH- PERFORMANCE
COMPUTING, COMPUTING IN SCIENCE & ENGINEERING, MAY/JUNE 2001. 5Bush, Richard J, et al, „Application of CFD to Aircraft Design‟, AIAA paper 86-2651, 1986. 6www.spscicomp.org/ScicomP14/talks/Sugavanam.pdf 7John D. Anderson, Jr., “Computational Fluid Dynamics-The Basics with Applications”, McGraw-Hill, Inc., 1995. 8D. A., Anderson, J. C., Tannehill, and R. H., Pletcher, “Computational Fluid Dynamics and Heat Transfer”, McGraw-Hill
Book Co., 1984. 9David C., Wilcox, “Basic Fluid Mechanics”, First Edition, DCW Industries Inc, 1997. 10David Pnueli., and Chaim Gutfinger, “Fluid Mechanics”, Cambridge University Press, 1992. 11P. D., Lax, K., and B., Wendroff, “Systems of Conservation Laws”, Communications on Pure and Applied Mathematics,
Vol. 13, PP. 217-237.
12R. D., Richtmyer, “A Survey of Difference Methods for Nonsteady Fluid Dynamics”, NCAR Technical Note 63-2, Boulder,
Colorado. 13R. W., MacCormack, “Current Status of Numerical Solutions of the Navier-Stokes Equations”, AIAA paper no. 85-0032,
1985. 14D.B. Spalding, “A Novel Finite Difference Formulation for Differential Expression Involving both First and Second
Derivatives”, International Journal of Numerical Methods, Vol. 4, PP. 551–559. 15M. Hafez, and D.A., Caughey, “Frontiers of Computational Fluid Dynamics”, World Scientific, 2005. 16U. Ghia, K. N. Ghia, and C. T. Shin, “High –Resolutions for Incompressible Flow using the Navier-Stokes Equations and a
Multigrid Method”, Journal of Computational Physics, Vol. 48, 1982, PP 387-441. 17Stephen Akwaboa, “Navier-Stokes Solver for a Supersonic Flow over a Rearward-Facing Step”, M. S. Thesis, (Department
of Mechanical Engineering, North Carolina A & T State University, Greensboro, 2004). 18D. C., McCormick, “Shock/Boundary Layer Interaction Control with Vortex Generator and Passive Cavity”, AIAA
Journal, Vol. 31, Issue 1, 1993, PP 91-96. 19Maurice Rasmussen, and David Ross Boyd, “Hypersonic Flow”, John Wiley & Sons Inc., 1994. 20Y. H. Choi, C. L. Merkle, “The Application of Preconditioning in Viscous Flows”, Journal of Computational Physics, Vol.
105, 1993, PP 207-223. 21D. Vigneron, J. M. Vaassen, and J.A. Essers, “An Implicit Finite Volume Method for the Solution of 3D Low Mach Number
Viscous Flows using a Local Preconditioning Technique”, Journal of Computational and Applied mathematics, Vol. 215, 2008,
PP 610-617 22Zeng-Chang et al., The CE/SE Method for Navier-Stokes Equations Using Unstructured Meshes for Flows at All Speeds.,
AiAA 2000-0393.

American Institute of Aeronautics and Astronautics
15
23R. S. Amano and D Sun, „Numerical Simulation of Supersonic Flowfield with Secondary Injection‟, 24th International
Congress of the Aeronautical Sciences, ICAS 2004. 24Valero Viti and Joseph Schetz, „Comparison of the First and Second Order Turbulence Models for a Jet/3D Ramp
Combination in Supersonic Flow‟, AIAA 2005-1100. 25D. Om, and M. E. Childs, “Multiple Transonic Shock Wave/Boundary Layer Interaction in a circular Duct”, AIAA Journal,
Vol. 23, Issue 5, 1985, PP 1506-1511. 26B. F., Carroll, and J. C., Dutton, “Characteristics of Multiple Shock Wave/ Turbulent Boundary Layer Interactions in
Rectangular Ducts”, Journal of Propulsion and Power, Vol. 6, Issue 2, 1990, PP 186-193. 27K., Matsuo, Y., Miyazato, and H. D., Kim, “Shock Train and Pseudo Shock Phenomena in Internal Gas Flow”, Progress in
Aerospace, Vol. 35, Issue 1, 1999, PP 33-100. 28Itaru Hataue, “Computational study of the shock wave boundary-layer interaction in a duct”, North Holland, Fluid
Dynamics Research 5 (1989) 217-234 29 Elamin, Gafar, „The Integral Differential Scheme (IDS): A New CFD Solver for the System of Navier-Stokes Equations
with Applications‟, Dissertation 2008

Center For Aerospace Research
Validation and Verification of the Navier-Stokes Solutions
Obtained from the Applications of the
Integro-differential Scheme
AIAA 2011
Presenter: Mookesh Dhanasar, Ph.D. Contributors: Fredrick Ferguson, Ph.D., Nasstaja Dasque
Department of Mechanical Engineering North Carolina Agricultural and Technical State University
Jul-14 1

Center For Aerospace Research
Outline
1) Brief overview of CFD
2) Mathematical Overview of the
Integro-differential Scheme
3) Test Cases
4) Conclusion

Center For Aerospace Research 3
Introduction • Historically only Analytical Fluid Dynamics (AFD) and
Experimental Fluid Dynamics (EFD).
• CFD is the computer simulation of fluid dynamic systems through
the use of engineering models (mathematical formulation) and
numerical methods (discretization methods and grid generations)
• CFD made possible by the advent of digital computer and advancing
with improvements of computer resources (1947, 500 Flops, 2003
Teraflops, 2003 2015 Petaflops?)
1947 - 500 flops Computer 2003 – 20 Teraflops Computer
Data, Ref. 2
Jul-14

Center For Aerospace Research 4
Why use CFD?
1. Engineering: Analysis and Design A. 1. Simulation-based design instead of “build & test”
More cost effective and more rapid than EFD
CFD provides high-fidelity database for diagnosing flow field
B. 2. Simulation of physical fluid phenomena that are difficult for experiments
Full scale simulations (e.g., automobile, ships and airplanes)
Environmental effects (wind, weather, etc.)
Hazards (e.g., explosions, radiation, pollution)
Physics (e.g., planetary boundary layer, stellar evolution)
2. Exploration: Knowledge of flow physics
Data, Ref. 2
Jul-14

Center For Aerospace Research 5
Where is CFD used?
• Aerospace
• Automotive
• Biomedical
• Chemical
Processing
• HVAC
• Hydraulics
• Marine
• Oil & Gas
• Power
Generation
• Sports
Data, Ref. 3
Jul-14

Center For Aerospace Research
Example of the Importance of CFD to the Aero-Industry
Ref. 4 Data
Jul-14

Center For Aerospace Research
CFD Challenges?
Ref. 4 Data
Long Cycle Times Due to
1. Grids Generation Req. &
2. Fidelity of Simulation Tools
Engineering Perspective: Analysis, Not Design
Jul-14

Center For Aerospace Research
Distribution of Current Turbulence Usage
Ref. 5 Data
-Use DNS/LES Data to Develop Turbulence Models for Cartesian Grid Systems
Why Cartesian Grids? -fast grid generation, numerical & memory efficiency during parallelization
Why Algebraic Turbulence Models? -numerical & memory efficiency -capture the basic physics of the process
Research Goal: Develop Algebraic Turbulence Models
Jul-14
Computer Speed vs. Time (Year)

Center For Aerospace Research Jul-14 9
The Integral Form of the Equations
kwjviuV
kdxdyjdxdzidydzsd
kqjqiqq zyx
2
2VeE
v s
sdVdvt
0
sdsPdVsdVdvVt
sssv
ˆ.
ssssv
sdqsdVsdVPsdVEEdvt
...
where
zzzyzx
yzyyyx
xzxyxx
, ,

Center For Aerospace Research Jul-14 10
x
v
y
uyxxy
x
w
z
uzxxz
z
v
y
wzyyz
x
Tkqx
y
Tkq y
z
Tkqz
Viscous Relations
Equations and formulas from: J. D. Anderson(1995) : “Computational Fluid Dynamics-The basics with applications”, McGraw-Hill, Inc.
z
w
y
v
x
uxx 2
3
2
z
w
x
u
y
vyy 2
3
2
y
v
x
u
z
wzz 2
3
2

Center For Aerospace Research Jul-14 11
The Closed System of the Equations
The closed system of the equations has only five unknowns
Twvu ,,,,
Additional relations
Equation of state
Internal energy
Sutherland’s law for viscosity
Prandtl number
RTP
TCe v
K
Cp
Pr
110
1105.1
T
T
T
T

Center For Aerospace Research
IDS Control Volume Representation
i,j,k
z
x
y
Jul-14 12
Points
Cells
Control Volume
Key Features

Center For Aerospace Research
Mass Conservation in relations to Cell
i
Surface
iSurfaceCenterCell
dsnVt
dV
6
SurfacesCellatFluxesLocalFCenterCellatFluxesofGradient
usu min
plusv
plusu
usv min
v s
sdVdvt
0
usw min
plusw
plus
us
plus
us
plus
us
average
cell
wwww
wwww
z
vvvv
vuvv
y
uuuu
uuuu
xt
4321
min4321
4321
min4321
4321
min4321
4
1
4
1
4
1
Jul-14

Center For Aerospace Research
IDS Implementation Steps
E
w
v
u
U
U
U
U
U
U m
5
4
3
2
1
tdt
dUUU
kji
mt
kjim
tt
kjim
,,
,,,, )()(
Construct the solution using Taylor Series Expansion
Treat each eight cells as a control volume of center i,j,k and evaluate the generic function U as an arithmetic average of its value at the centers of the eight cells.
8
1
,,8
1
cell
average
cell
t
kji UU
In another consistence averaging process, the time derivative at node i,j,k is obtained as an arithmetic average of the time derivatives at the cell centers.
8
1,,8
1
cell cell
m
kji
m
dt
dU
dt
dU
Jul-14

Center For Aerospace Research
1
222,,
'
222,
,,,,,,
,,
111
Re
2
111
zyx
zyxa
z
w
y
v
x
u
t
kji
L
ji
kjikjikji
kjiCFL
Use the following CFL Criterion to evaluate the time step
kji
kjikji
kji
,,
,,,,
,,'
Pr/,3
4
max
tdt
dUUU
kji
mold
kjim
new
kjim
,,
,,,, )()( Update the solution
Decouple the new variables
new
kji
new
kji U,,1,,
new
kji
new
kjiU
Uu
,,1
2,,
new
kji
new
kjiU
Uv
,,1
3,,
new
kji
new
kjiU
Uw
,,1
,,
4
2
,,
222
1
5,, 1
2
M
wvu
U
UT
new
kji
new
kji
IDS Implementation Steps
Jul-14

Center For Aerospace Research
Test Case 1: Supersonic Flow over a flat plate

Center For Aerospace Research
Q2 Q1 Q3
5.4M
Inflow Cdts Outflow Cdts
Far field Cdts
Flat Plate
Mach 4.5 Flow Over A Flat Plate
Grid Independence Studies
Code Validation and Verification Studies
Leading & Trailing Edge Studies
Test Problem: Subsonic, Transonic & Supersonic/Hypersonic Flat Plate
72.0Pr,10*2.7Re,5.4 6 LM
Sym Sym
Objectives:
Jul-14

Center For Aerospace Research
x-NonDim
Tem
per
atu
re-
Non
Dim
0 0.5 1 1.5 20.7
0.8
0.9
1
1.1
1.2
Grid101
Grid201
Grid301
Grid401
Grid501
Frame 001 03 Jun 2010
Mach 4.5 Grid Temperature Studies
x-NonDim
V-v
eloci
ty-
No
nD
im
0 0.25 0.5 0.75 1 1.25 1.5 1.75 2
-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
Grid101
Grid201
Grid301
Grid401
Grid501
Frame 001 03 Jun 2010
Mach 4.5 Grid v-Velocity Studies
Mach 4.5 Grid Density Studies
x-NonDim
Den
sity
-N
onD
im
0 0.5 1 1.5 2
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
Grid101
Grid201
Grid301
Grid401
Grid501
Frame 001 03 Jun 2010
x-NonDim
U-v
eloci
ty-
No
nD
im
0 0.25 0.5 0.75 1 1.25 1.5 1.75 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Grid101
Grid201
Grid301
Grid401
Grid501
Frame 001 03 Jun 2010
Mach 4.5 Grid u-Velocity Studies
Grid Independence Studies
72.0Pr,10*2.7Re,5.4 6 LM
Jul-14

Center For Aerospace Research
Mach 4.5 Flow Field Parameters Over Flat Plate
Density: 1.04545 1.14193 1.23842 1.3349 1.43138 1.52787 1.62435 1.72084
Frame 001 03 Jun 2010
V-Velocity: 0.00950367 0.0290327 0.0485618 0.0680908
Frame 001 03 Jun 2010
Density Contour V-Velocity Contour
Temperature: 1.00952 1.04639 1.08325 1.12011 1.15697 1.19383 1.23069 1.26755
Frame 001 03 Jun 2010
U-Velocity: 0.143421 0.286841 0.430262 0.573683 0.717104 0.860524
Frame 001 03 Jun 2010
U-Velocity Contour Temperature Contour
72.0Pr,10*2.7Re,5.4 6 LM
Jul-14

Center For Aerospace Research
Pressure: 1.0768 1.31566 1.55452 1.79339 2.03225
Frame 001 04 Jun 2010
Mach 4.5 Pressure Field Over Flat Plate
72.0Pr,10*2.7Re,5.4 6 LM
Jul-14

Center For Aerospace Research
Mach 4.5 Density Profiles on Flat Plate
Density - NonDim
y-
No
nD
im
0.9 1 1.1 1.2 1.3 1.40
0.1
0.2
0.3
0.4
0.5
Q1-Density
Q2-Density
Q3-Density
Frame 001 03 Jun 2010
Q2 Q1 Q3
5.4M
72.0Pr,10*2.7Re,5.4 6 LM
Adiabatic Conditions
Jul-14

Center For Aerospace Research
U-Velocity - NonDim
y-
Non
Dim
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
Q1-uVelocity
Q2-uVelocity
Q3-uVelocity
Frame 001 03 Jun 2010
Q2 Q1 Q3
5.4M
Mach 4.5 u-Velocity Profiles on Flat Plate
72.0Pr,10*2.7Re,5.4 6 LM
Adiabatic Conditions
Jul-14

Center For Aerospace Research
V-Velocity - NonDim
y-
Non
Dim
-0.01 0 0.01 0.02 0.03 0.04 0.05 0.06 0.070
0.1
0.2
0.3
0.4
0.5
Q1-vVelocity
Q2-vVelocity
Q3-vVelocity
Frame 001 03 Jun 2010
Q2 Q1 Q3
5.4M
Mach 4.5 v-Velocity Profiles on Flat Plate
72.0Pr,10*2.7Re,5.4 6 LM
Adiabatic Conditions
Jul-14

Center For Aerospace Research
Temperature - NonDim
y-
Non
Dim
0.98 1 1.02 1.04 1.06 1.08 1.1 1.12 1.140
0.1
0.2
0.3
0.4
0.5
Q1-Temperature
Q2-Temperature
Q3-Temperature
Frame 001 03 Jun 2010
Q2 Q1 Q3
5.4M
Mach 4.5 Temperature Profiles on Flat Plate
72.0Pr,10*2.7Re,5.4 6 LM
Adiabatic Conditions
Jul-14

Center For Aerospace Research
Flat Plate - Leading Edge Effects
Normal Shock Wave Due to Leading Edge/Boundary Layer Development
Flow Field Expansion Due to High Pressure Boundary Layer Compression
x-NonDim
y-N
onD
im
0.4 0.5 0.6 0.7 0.80
0.01
0.02
0.03
0.04
0.05 Pressure
2.1811
2.0010
1.8209
1.6408
1.4607
1.2806
1.1006
0.9205
0.7404
0.5603
0.3802
Frame 001 05 Jun 2010
x-NonDim
y-N
on
DIm
0.4 0.5 0.6 0.7 0.80
0.01
0.02
0.03
0.04
0.05
Density
1.6845
1.6000
1.5154
1.4308
1.3463
1.2617
1.1772
1.0926
1.0080
0.9235
0.8389
0.7544
0.6698
0.5853
0.5007
Frame 001 05 Jun 2010
Pressure Density 72.0Pr,10*2.7Re,5.4 6 LM
Adiabatic Conditions
Observations:
Jul-14

Center For Aerospace Research
Flat Plate - Leading Edge Effects
x-NonDIm
y-N
onD
im
0.5 0.6 0.70
0.01
0.02
0.03
0.04
0.05
U-velocity
0.946157
0.88308
0.820003
0.756925
0.693848
0.630771
0.567694
0.504617
0.44154
0.378463
0.315386
0.252308
0.189231
0.126154
0.0630771
Frame 001 05 Jun 2010
x-NonDIm
y-N
onD
im
0.5 0.6 0.70
0.01
0.02
0.03
0.04
0.05V-Velocity
0.0754
0.0483
0.0187
0.0078
0.0015
-0.0257
-0.0553
-0.0849
-0.1145
-0.1440
Frame 001 05 Jun 2010
u-Velocity V-Velocity 72.0Pr,10*2.7Re,5.4 6 LM
Normal Shock Wave Due to Leading Edge/Boundary Layer Development
Flow Field Expansion Due to High Pressure Boundary Layer Compression
Observations:
Adiabatic Conditions
Jul-14

Center For Aerospace Research
x-NonDIm
y-N
onD
im
1.4 1.45 1.5 1.55 1.6 1.65 1.70
0.025
0.05
0.075
0.1
0.125
0.15
0.175
0.2
0.225
0.25V-Velocity
0.0630616
0.0482682
0.0334749
0.0186815
0.00388812
-0.0109053
-0.0256986
-0.040492
-0.0552854
-0.0700788
-0.0848721
-0.0996655
-0.114459
-0.129252
-0.144046
Frame 001 05 Jun 2010
x-NonDIm
y-N
onD
im
1.4 1.45 1.5 1.55 1.6 1.65 1.70
0.025
0.05
0.075
0.1
0.125
0.15
0.175
0.2
0.225
0.25U-velocity
0.946157
0.88308
0.820003
0.756925
0.693848
0.630771
0.567694
0.504617
0.44154
0.378463
0.315386
0.252308
0.189231
0.126154
0.0630771
Frame 001 05 Jun 2010
Flat Plate - Trailing Edge Effects
Hypersonic Trailing Edge/Boundary Layer Interaction: Flow Field Expansion
72.0Pr,10*2.7Re,5.4 6 LM
Adiabatic Conditions
Jul-14

Center For Aerospace Research
x-NonDim
y-N
onD
im
1.4 1.5 1.6 1.7 1.80
0.01
0.02
0.03
0.04
0.05
U-velocity: 0.033 0.130 0.228 0.326 0.423 0.521 0.619 0.716 0.814 0.912
Frame 001 05 Jun 2010
72.0Pr,10*2.7Re,5.4 6 LM
Flat Plate - Trailing Edge Effects
x-NonDim
y-N
onD
im
1.4 1.5 1.6 1.7 1.80
0.01
0.02
0.03
0.04
0.05
V-Velocity: -0.151 -0.128 -0.105 -0.082 -0.060 -0.037 -0.014 0.009 0.032 0.055
Frame 001 05 Jun 2010
72.0Pr,10*2.7Re,5.4 6 LM
Hypersonic Trailing Edge/Boundary Layer Interaction: Flow Field Expansion
Adiabatic Conditions
Jul-14

Center For Aerospace Research
Influence of Temperature Boundary Conditions on Flowfield
x-NonDim
Den
sity
0 0.5 11
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
2.1
2.2
2.3
Adiabatic Wall
Constant Wall
Frame 001 07 Jun 2010
x-NonDIm
Pre
ssure
0 0.5 11
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
Adiabatic Wall
Constant Wall
Frame 001 07 Jun 2010
x-NonDIm
Tem
per
ature
0 0.5 1
1
1.1
1.2
Adiabatic Wall
Constant Wall
Frame 001 07 Jun 2010
Adiabatic & Constant Wall Conditions
Jul-14

Center For Aerospace Research
Test Case 2: Incident Shock Wave Boundary Layer Interaction

Center For Aerospace Research
Ref: Experimental Study of an Incident Shock Wave/Turbulent Boundary Layer Interaction Using PIV, R.A. Humble,* F. Scarano,† and B.W van Oudheusden‡ Delft University of Technology, 2629 HS Delft, The Netherlands
Incident Shock Wave Boundary Layer Interaction
IDS-NCAT Results

Center For Aerospace Research
Non-Dim u-Velocity Contour/Velocity Vector Plots
Non-Dim u-vel plots
Center For Aerospace Research
Non-Dim v-Velocity Contour/Velocity Vector Plots
Non-Dim v-vel plots

Center For Aerospace Research
Test Case 3: Supersonic Jet Interaction

Center For Aerospace Research
Ref. 24: Viti et al, “Detailed Flow Physics of the Supersonic Jet Interaction Flow Field”
Supersonic Jet Interaction

Center For Aerospace Research
Supersonic Jet Interaction Ref. 24: Viti et al, “Detailed Flow Physics of the Supersonic Jet Interaction Flow Field”

Center For Aerospace Research
Test Case 4: Supersonic Flow in a Duct
Center For Aerospace Research
27K., Matsuo, Y., Miyazato, and H. D., Kim, “Shock Train and Pseudo Shock Phenomena in Internal Gas Flow”, Progress in Aerospace, Vol. 35, Issue 1, 1999, PP 33-100
Supersonic Flow in a Duct

Center For Aerospace Research
Ref. SHOCK TRAIN, Fluid Dynamics Research 5 (1989) 217-234, North-Holland “Computational Study
of the Shock Wave Boundary-layer Interaction in a duct”
Shock Wave Boundary-Layer Interaction in a Duct
Velocity vectors imposed on density contours (a) paper (b) IDS results

Center For Aerospace Research
Ref. SHOCK TRAIN, Fluid Dynamics Research 5 (1989) 217-234, North-Holland “Computational Study
of the Shock Wave Boundary-layer Interaction in a duct”
Shock Wave Boundary-Layer Interaction in a Duct

Center For Aerospace Research
Conclusions
A new numerical scheme for solving the complete three dimensional form of the system of the Navier-Stokes equations was developed.
The ability of the scheme to solve different flow types was tested on compressible external flow, Incompressible flow, and internal compressible flow applications.
In all cases the results showed very good agreement with the physical expectation of the flow, and the experimental data.
This agreement solidified the belief that the scheme is robust, efficient, and capable of solving a variety of complex fluid dynamics problems.
The FORTRAN program can be modified to run on multiple platforms Extension of IDS to Arbitrary Geometries and to include other phenomena
such as turbulence and finite rate chemistry is recommended.
Even though the scheme generates impressive results using the available version of CFL criterion a complete stability analysis is recommended to determine the appropriate CFL criterion for the scheme.
Jul-14

Center For Aerospace Research

Center For Aerospace Research Jul-14 43
Length
Width
Height
The x Component Velocity Distribution on Nine Planes Cavity Velocity Vectors on Three XY Planes
The Lid Driven Cavity Problem

Center For Aerospace Research Jul-14 44
IDS Solution Vigneron et. Al. Solution
The Lid Driven Cavity Problem: Streamlines Plot
Flow

Center For Aerospace Research Jul-14 45
The Lid Driven Cavity Problem : Validation
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-0.3 0.0 0.3 0.5 0.8 1.0
IDS results Choi & Merkle (1995) Vigneron et al. (2008)
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0.00 0.20 0.40 0.60 0.80 1.00
IDS Results Choi & Merkle (1995) Vigneron et al.
The x Component Velocity Profile along the Vertical Centerline of the Cavity
The y Component Velocity Profile along the Horizontal Centerline of the Cavity

Center For Aerospace Research




















