
Using formal methods to verify safe deep stall landing of a MAV
17
Wolfgang Pointner, Gabriele Kotsis, Peter Langthaler, and Michael Naderhirn AeroSpy Sense & Avoid Technology GmbH
-
Upload
austrianinstituteoftechnology -
Category
Documents
-
view
0 -
download
0
Transcript of Using formal methods to verify safe deep stall landing of a MAV
Wolfgang Pointner, Gabriele Kotsis,Peter Langthaler, and Michael Naderhirn
AeroSpySense & Avoid Technology GmbH
Safe autonomous landing maneuver
Consideration of aerodynamic capabilities
Accurate representation of flight state
Verification through formal methods
Example for development methodology
Wing Span 1.3 m
Weight 1.5 kg
Endurance 30 min
Applications� Aerial Photography
� Observation
� Search and Rescue
� Gas Detection
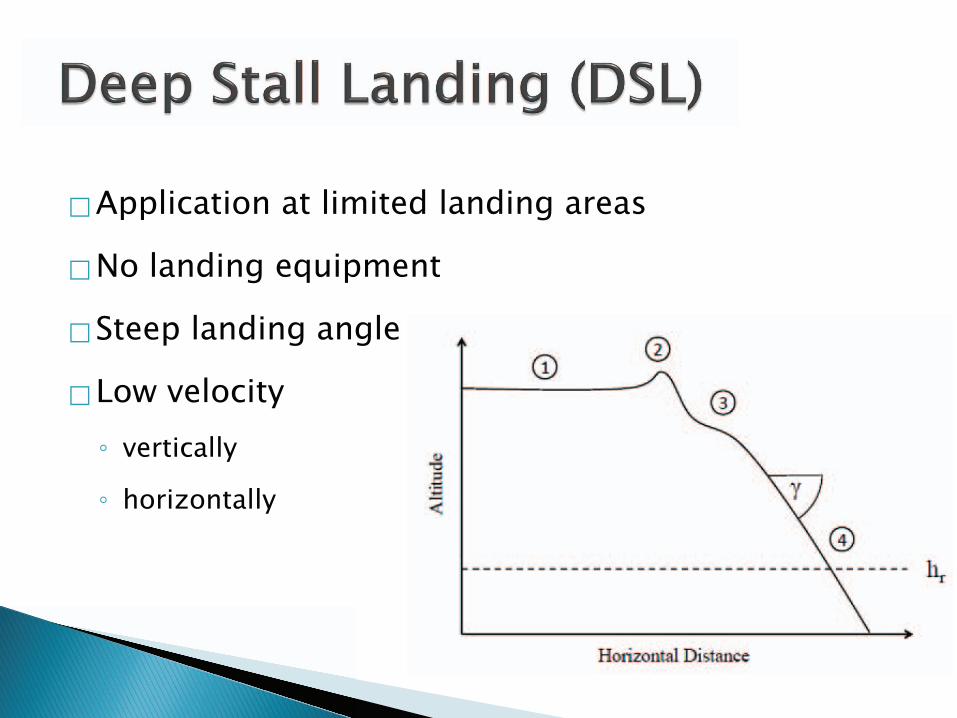
Application at limited landing areas
No landing equipment
Steep landing angle
Low velocity� vertically
� horizontally
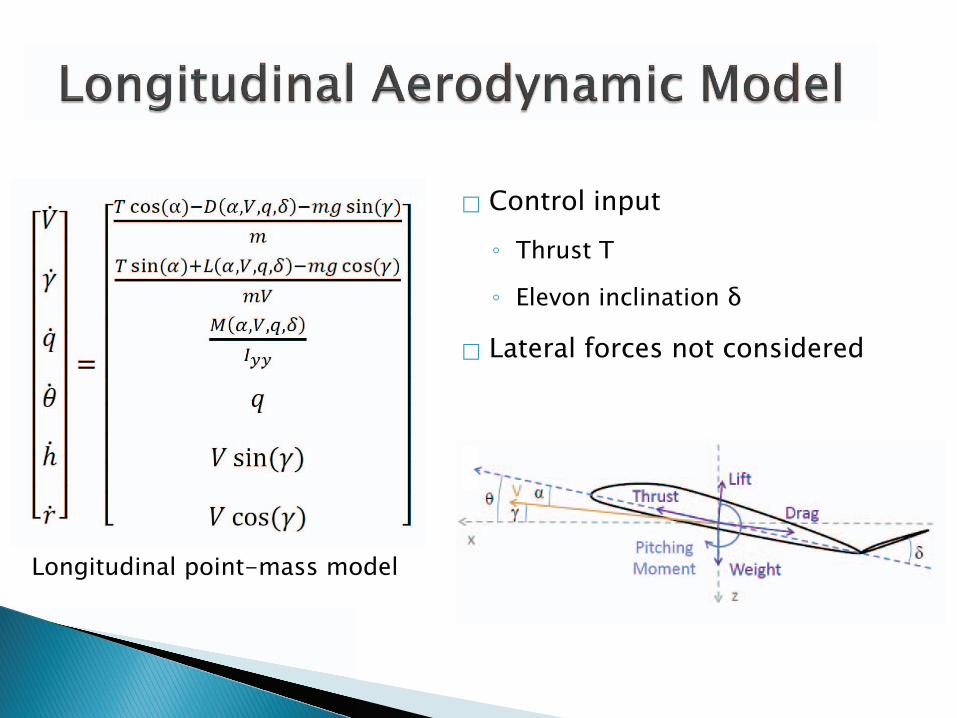
Longitudinal point-mass model
Control input
� Thrust T
� Elevon �����������
Lateral forces not considered
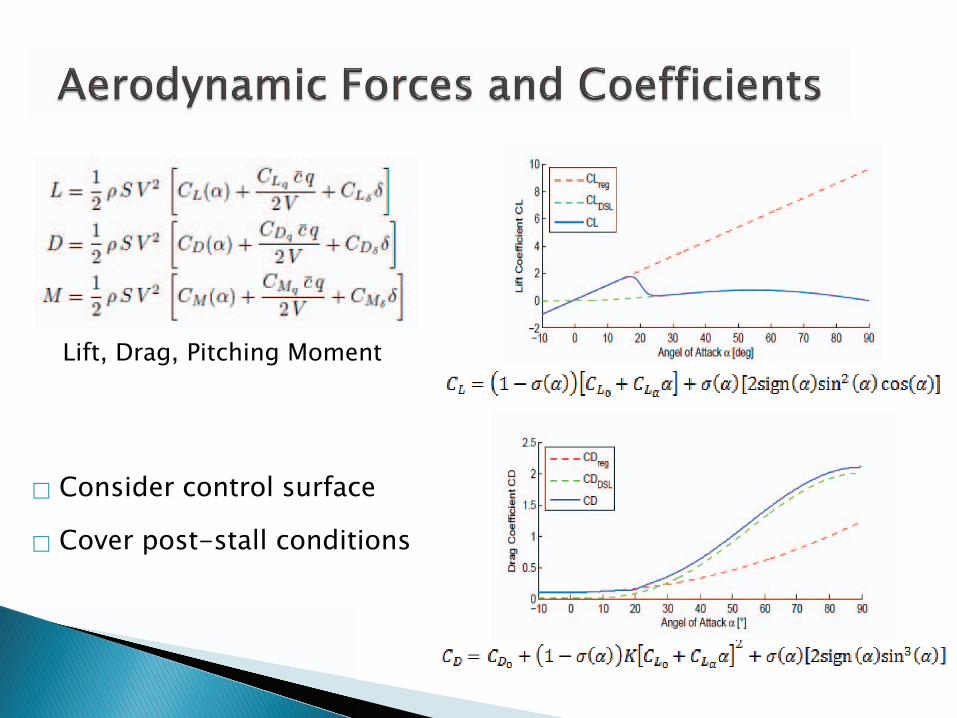
Lift, Drag, Pitching Moment
Consider control surface
Cover post-stall conditions
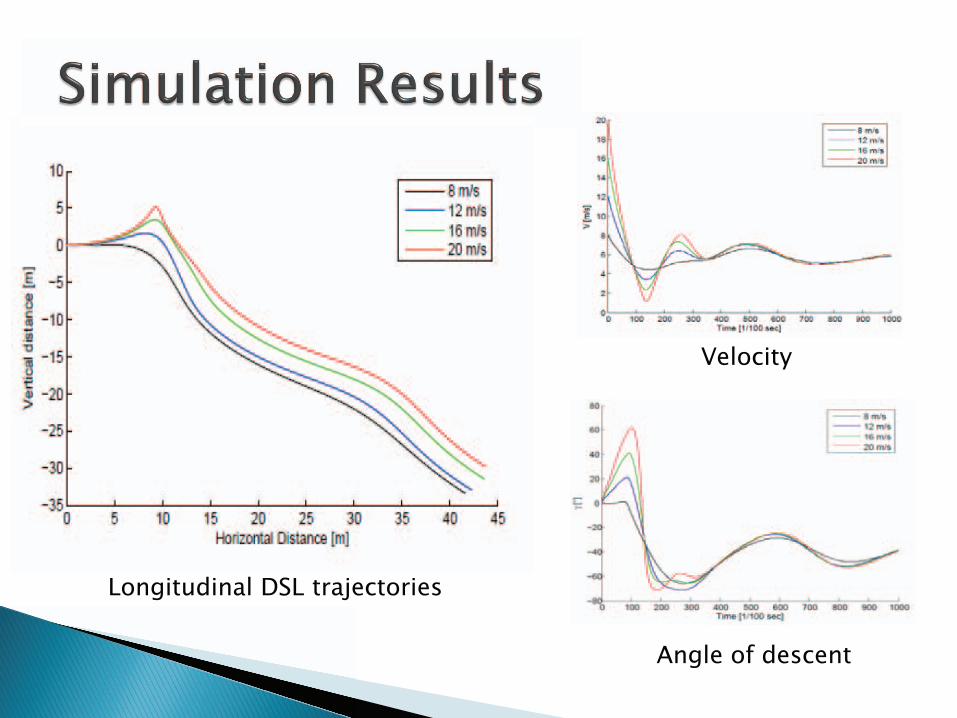
Longitudinal DSL trajectories
Velocity
Angle of descent
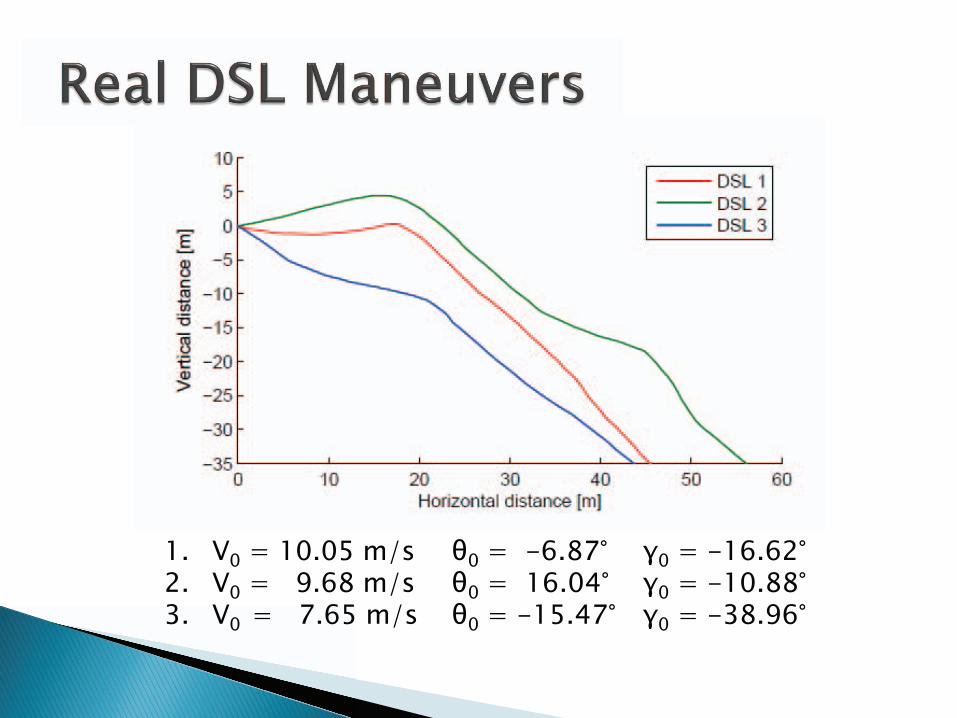
1. V0 = 10.05 m/s �0 = -6.87° �0 = -16.62°2. V0 = 9.68 m/s �0 = 16.04° �0 = -10.88°3. V0 = 7.65 m/s �0 = -15.47° �0 = -38.96°

Discrete state dynamics = Operational modes
Continuous state dynamics = Aerodynamic model
Transitions� System-initiated
� Caused externally
Subsystems� State bounds
� Control inputs
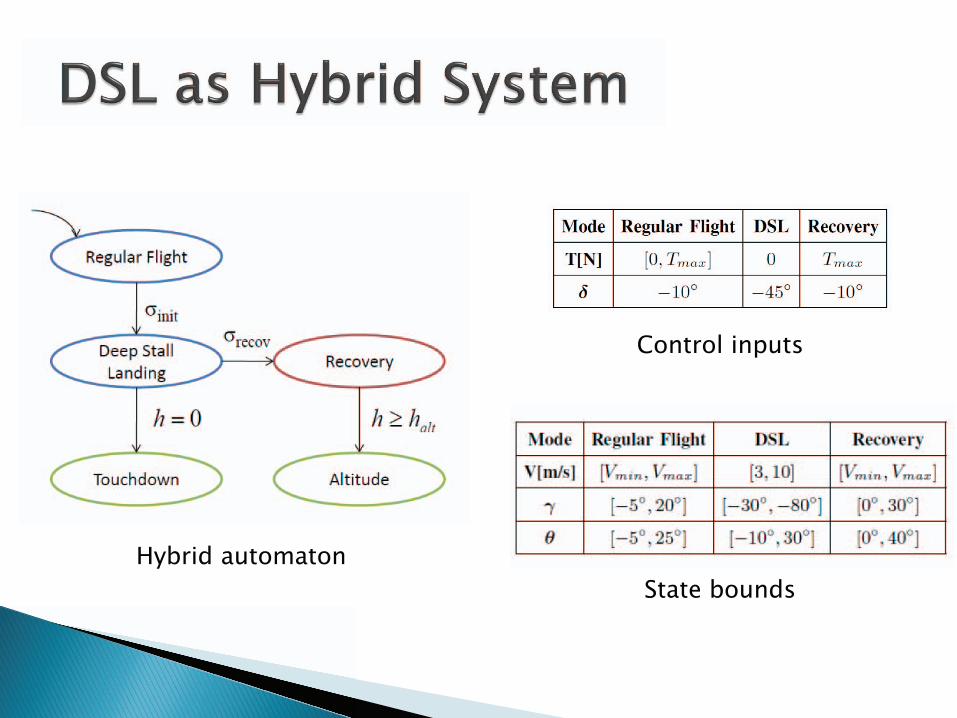
Control inputs
State boundsHybrid automaton
Identification of hybrid subsystems (Hx)
System-initiated mode transitions ( x)
Calculation of backwards reachable sets (Wx)� Toolbox for Level Set Methods (Ian Mitchell, UBC)
� Time dependent Hamilton-Jacobi PDE
� Calculate safe flight envelopes
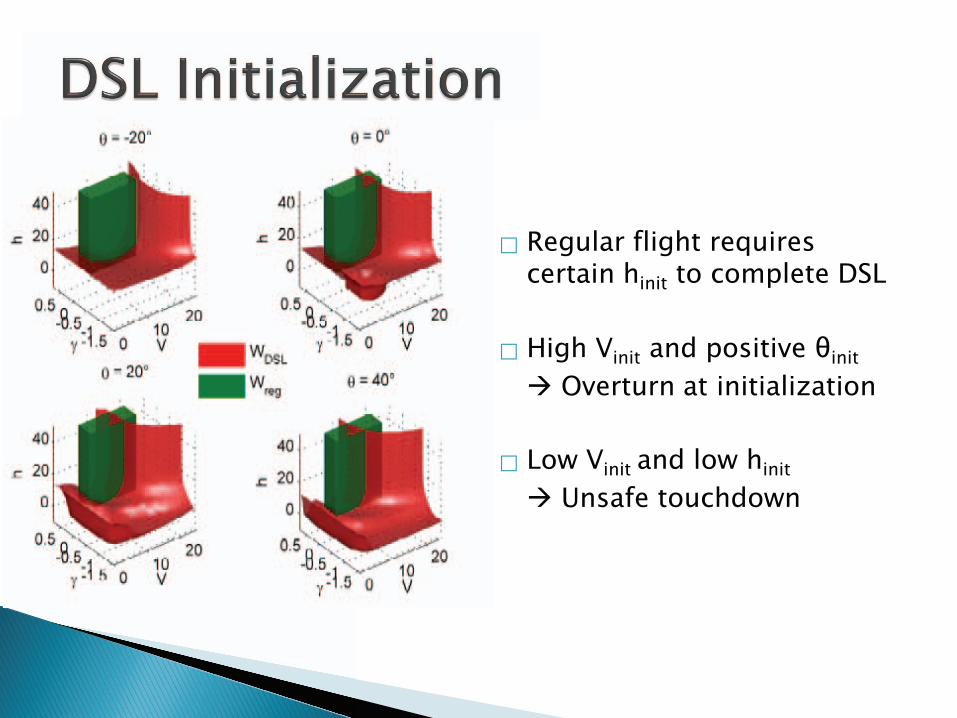
Regular flight requires certain hinit to complete DSL
High Vinit and positive �init� Overturn at initialization
Low Vinit and low hinit� Unsafe touchdown

Recovery only safe at altitudes above approx. 20 m
Higher �init exacerbates DSL
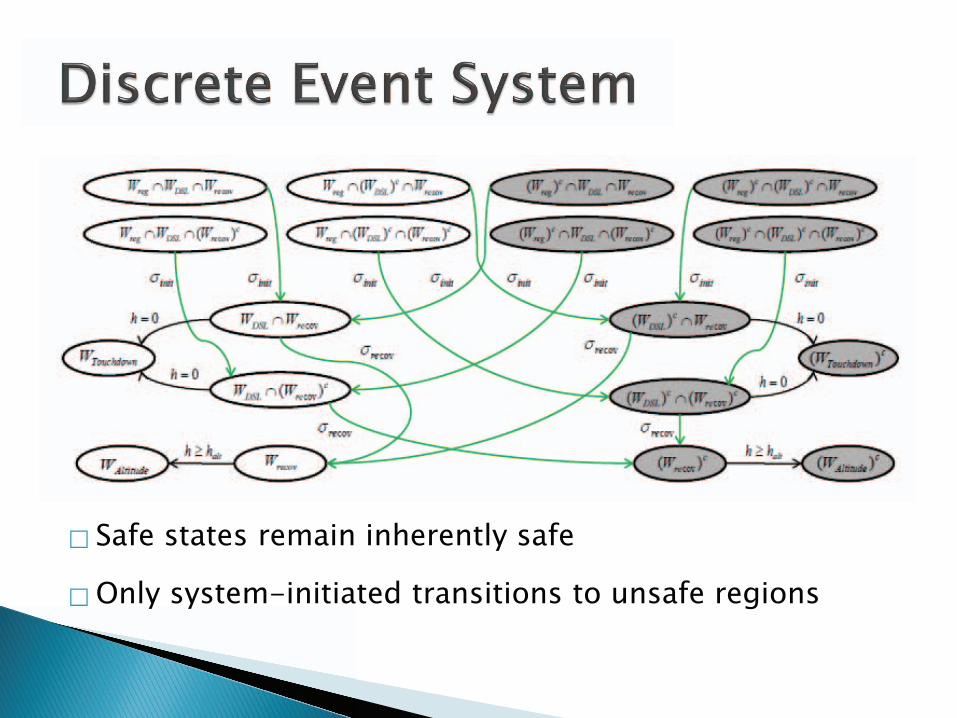
Safe states remain inherently safe
Only system-initiated transitions to unsafe regions
DSL is a practical landing maneuverReachability analysis show suggested shapesHigh computational costsMethodology applicable for similar problems
Implementation on an autopilotImprovements to calculate landing trajectoryDevelopment of a GA landing assistance system

R. F. Stengel, Flight Dynamics. Princeton University Press, 2004.C. J. Tomlin, I. M. Mitchell, A. M. Bayen, and M. Oishi, “Computational techniques for the verification of hybrid systems,” in Proceedings of the IEEE, pp. 986–1001, 2003.S. Osher and J. A. Sethian, “Fronts propagating with curvature dependent speed: Algorithms based on hamilton-jacobi formulations,” Journal of Computational Physics, vol. 79, no. 1, pp. 12–49, 1988.I. M. Mitchell, “Application of level set methods to control and reachability problems in continuous and hybrid systems,” Ph.D. dissertation, Stanford University, 2002.I.M. Mitchell, “The flexible, extensible and efficient toolbox of level set methods,” Journal of Scientific Computing, vol. 35, no. 2–3, 2008.M. Oishi, C. J. Tomlin, and A. Degani, “Discrete abstractions of hybrid systems: Verification of safety and application to user-interface design,” NASA, Ames Research Center, Tech. Rep., 2003.




















