Flight dynamics and control in relation to stall
7
Flight Dynamics and Control in Relation to Stall Daniele Pucci INRIA 2004 Route des Lucioles, Sophia Antipolis, France, [email protected] Abstract— Control of fixed-wing aircraft at high angles of attack is particularly challenging. In this case, aerodynamic forces can be subjected to strong variations, among which stall is certainly the most critical. This paper tackles flight dynamics and control for aerial vehicles subjected to the stall phenomenon. We propose a class of modeling functions for the lift coefficient, and we investigate the control problem. The equilibria analysis is addressed prior to the control design. We show that the stall phenomenon never forbids the existence of an equilibrium orientation for any reference trajectory, but the uniqueness of this orientation is not in general ensured. Consequently, the equilibrium orientation can be subjected to discontinuities leading to an ill-conditioned control problem. Feedback control laws are derived for reference velocities associated with continuous equilibrium orientations. I. I NTRODUCTION Flight dynamics remains an active research domain after decades of studies in the subject. The complexity of aerody- namic effects and the diversity of wing profiles partly account for this continued interest. Lately, the emergence of small aerial vehicles for robotic applications (e.g. quad-rotors) has also renewed the interest of the control community in this subject. A major difficulty for the control of aerial vehicles is the non-linearity of the environmental reaction forces applied to the craft [1]. This paper aims at improving existing feedback control techniques by taking into account aerodynamic effects in the control design. Fixed-wing aircraft are vehicles capable of flight using forward motion that generates lift-and-drag forces as the wing moves through the air. These aircraft can be roughly divided into two classes: airplanes and convertible vehicles. For the former, weight is compensated for by lift forces acting essentially on the wings, and propulsion, which cannot typically counteract the weight of the aircraft, is used to compensate for drag forces associated with large air veloci- ties. By contrast, the latter can perform hovering flight at the expense of high energy consumption. During hovering, the convertible vehicle is typically controlled as a vertical take- off and landing (VTOL) vehicle since aerodynamic forces are of negligible intensity. On the other hand, classical airplane control techniques can be used in cruising flight. Control design techniques for airplanes and VTOLs have been developed along different directions. Airplanes feed- back control explicitly takes into account lift forces via linearized models at small angles of attack. Based on these models, stabilization is usually achieved through linear con- trol techniques [1]. Consequently, the obtained stability is local and difficult to be quantified. In addition, linearized models do not take into account the aerodynamic stall phenomenon, which is an abrupt reduction of lift at large angles of attack. This phenomenon has a crucial role in practice since it is often indicated as primary cause for airplane crashes [2]. Linear techniques are also used for VTOLs, but several nonlinear feedback methods have been proposed in the last decade to obtain (semi) global stability [3]–[6]. These methods, however, are based on simplified models that neglect aerodynamic effects. Even drag forces, in fact, are but seldom taken into account [7]. The literature on the control of convertible vehicles, however, is scarce. This can be explained by the difficulty to operate transitions between hovering and cruising modes, in relation to strong variations of drag and lift forces at high angles of attack. Among these variations, stall is certainly the most critical. This paper is dedicated to the flight dynamics analysis and control in the presence of the stall phenomenon. We propose a class of modeling functions for the lift coeffi- cient associated with a generic bisymmetric vehicle, and we investigate the control problem. We show that the stall phenomenon never forbids the existence of the equilibrium orientation profile along any reference trajectory. However, the uniqueness of this orientation cannot be always ensured. Consequently, the equilibrium orientation can be subjected to discontinuities leading to an ill-conditioned asymptotic stabilization problem. Concerning the control design, we derive stabilizing feedback laws for reference trajectories associated with continuous equilibrium orientation profiles. For simplicity, the analysis is exposed for a vehicle moving in the vertical plane. The paper is organized as follows. After specifying the notation used in the paper, general dynamic equations and modeling of aerodynamic forces are recalled in Section II. The modeling function for the lift coefficient is given in Section III. The equilibria analysis is presented in Section IV. Stabilizing feedback laws are given in Section V. II. BACKGROUND A. Notation We assume that the controlled vehicle can be modeled by a single actuated body immersed in air. The following notation is used: • G is the body’s center of mass and m is the mass of the vehicle, assumed to be constant.
Transcript of Flight dynamics and control in relation to stall

Flight Dynamics and Control in Relation to Stall
Daniele PucciINRIA
2004 Route des Lucioles, Sophia Antipolis, France,[email protected]
Abstract— Control of fixed-wing aircraft at high angles ofattack is particularly challenging. In this case, aerodynamicforces can be subjected to strong variations, among whichstall is certainly the most critical. This paper tackles flightdynamics and control for aerial vehicles subjected to the stallphenomenon. We propose a class of modeling functions forthe lift coefficient, and we investigate the control problem. Theequilibria analysis is addressed prior to the control design. Weshow that the stall phenomenon never forbids the existenceof an equilibrium orientation for any reference trajectory , butthe uniqueness of this orientation is not in general ensured.Consequently, the equilibrium orientation can be subjected todiscontinuities leading to an ill-conditioned control problem.Feedback control laws are derived for reference velocitiesassociated with continuous equilibrium orientations.
I. I NTRODUCTION
Flight dynamics remains an active research domain afterdecades of studies in the subject. The complexity of aerody-namic effects and the diversity of wing profiles partly accountfor this continued interest. Lately, the emergence of smallaerial vehicles for robotic applications (e.g. quad-rotors)has also renewed the interest of the control community inthis subject. A major difficulty for the control of aerialvehicles is the non-linearity of the environmental reactionforces applied to the craft [1]. This paper aims at improvingexisting feedback control techniques by taking into accountaerodynamic effects in the control design.
Fixed-wing aircraft are vehicles capable of flight usingforward motion that generateslift-and-drag forces as thewing moves through the air. These aircraft can be roughlydivided into two classes: airplanes and convertible vehicles.For the former, weight is compensated for by lift forcesacting essentially on the wings, and propulsion, which cannottypically counteract the weight of the aircraft, is used tocompensate for drag forces associated with large air veloci-ties. By contrast, the latter can perform hovering flight at theexpense of high energy consumption. During hovering, theconvertible vehicle is typically controlled as a vertical take-off and landing (VTOL) vehicle since aerodynamic forces areof negligible intensity. On the other hand, classical airplanecontrol techniques can be used in cruising flight.
Control design techniques for airplanes and VTOLs havebeen developed along different directions. Airplanes feed-back control explicitly takes into account lift forces vialinearized models at small angles of attack. Based on thesemodels, stabilization is usually achieved through linear con-trol techniques [1]. Consequently, the obtained stabilityis
local and difficult to be quantified. In addition, linearizedmodels do not take into account the aerodynamicstallphenomenon, which is an abrupt reduction of lift at largeangles of attack. This phenomenon has a crucial role inpractice since it is often indicated as primary cause forairplane crashes [2]. Linear techniques are also used forVTOLs, but several nonlinear feedback methods have beenproposed in the last decade to obtain (semi) global stability[3]–[6]. These methods, however, are based on simplifiedmodels that neglect aerodynamic effects. Even drag forces,in fact, are but seldom taken into account [7]. The literatureon the control of convertible vehicles, however, is scarce.This can be explained by the difficulty to operate transitionsbetween hovering and cruising modes, in relation to strongvariations of drag and lift forces at high angles of attack.Among these variations, stall is certainly the most critical.
This paper is dedicated to the flight dynamics analysisand control in the presence of the stall phenomenon. Wepropose a class of modeling functions for the lift coeffi-cient associated with a generic bisymmetric vehicle, andwe investigate the control problem. We show that the stallphenomenon never forbids the existence of theequilibriumorientation profilealong any reference trajectory. However,the uniqueness of this orientation cannot be always ensured.Consequently, the equilibrium orientation can be subjectedto discontinuities leading to an ill-conditioned asymptoticstabilization problem. Concerning the control design, wederive stabilizing feedback laws for reference trajectoriesassociated with continuous equilibrium orientation profiles.For simplicity, the analysis is exposed for a vehicle movingin the vertical plane.
The paper is organized as follows. After specifying thenotation used in the paper, general dynamic equations andmodeling of aerodynamic forces are recalled in Section II.The modeling function for the lift coefficient is given inSection III. The equilibria analysis is presented in SectionIV. Stabilizing feedback laws are given in Section V.
II. BACKGROUND
A. Notation
We assume that the controlled vehicle can be modeled bya single actuated body immersed in air.
The following notation is used:• G is the body’s center of mass andm is the mass of the
vehicle, assumed to be constant.

~0
~ı0
~~ı
~T
G
O
Zero–lift
γ
α
µ~FD
~FL
θ
~va
line
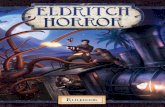
Fig. 1. Thrust-propelled vehicle subjected to aerodynamicreaction forces.
• I = {0;~ı0, ~0} is a fixed inertial frame with respectto (w.r.t.) which the vehicle’s absolute pose is measured.The vector of coordinates ofG w.r.t. I is denoted asx =(x1, x2)
T . Therefore, ~OG = x1~ı0 + x2~0 = (~ı0, ~0)x.• B = {G;~ı,~} is a frame attached to the body. The vector
~ı is parallel to the thrust force axis, and this leaves twopossible directions for this vector. The direction here chosenis consistent with the convention used for VTOL vehicles.• The vector of coordinates of the linear velocity ofG
w.r.t. I is denoted asx = (x1, x1)T , and asv = (v1, v2)
T
when expressed inB, i.e. ~v = ddt
~OG = (~ı0, ~0)x = (~ı,~)v.• The wind velocity is denoted as~vw = (~ı0, ~0)xw =
(~ı,~)vw. The airspeed ~va of the body is the differencebetween the velocity ofG and~vw. Thus,~va = (~ı0, ~0)xa =(~ı,~)va, with xa = x− xw andva = v − vw.• The vehicle’s orientation is characterized by the angleθ
between~ı0 and~ı. The rotation matrix of the angleθ is R(θ).• {e1, e2} denotes the canonical basis inR2. S = R(π/2)
is a skew-symmetric matrix.I = R(0) is the identity matrix.• Theith component of a vectorx is denoted asxi. Given
a functionf : R → R, its first and second derivative aredenoted asf ′ and f ′′ respectively. Given a functionf ofseveral variables, the partial derivative off w.r.t. one of them,sayx, is denoted as∂xf = ∂f
∂x. Given v, w ∈ R
n, the innerproduct between them is indicated as〈v, w〉 ≡ vTw.
B. System modeling
The equations of motion are derived by considering twocontrol inputs. The first one is athrust force ~T along thebody fixed direction~ı (~T = −T~ı) whose main role is toproduce longitudinal motion. The second control input is atorque actuation, typically created via secondary propellers,rudders or flaps, control moment gyros, etc. For the sakeof simplification, we assume that any desired torque canbe produced so that the vehicle’s angular velocityω ismodified at will and used as a control variable (see [7] forcomplementary explanations concerning this assumption).
The external forces acting on the body are composed ofthe gravitym~g and the aerodynamic forces denoted by~Fa.Applying the fundamental theorem of mechanics yields:
mx = −TR(θ)e1 +mge1 + Fa(xa, θ), θ = ω, (1)
with g the gravity constant andFa the aerodynamic forcesexpressed in the inertial frame, i.e.~Fa = (~ı0, ~0)Fa.
C. Aerodynamic forces
TheBuckinghamπ−theorem[8, p. 34] points out that thestatic aerodynamic forces can be written as follows
Fa = ka|xa|[cL(Re,M, α)S − cD(Re,M, α)I
]xa, (2)
whereka := ρΣ2 , ρ is the free streamair density,Σ is the
characteristic surface of the vehicle’s body,cL(·) is the liftcoefficient, cD(·) > 0 is the drag coefficient(cL and cDare calledaerodynamic characteristics), Re is the Reynoldsnumber, M is theMach number, andα is theangle of attack.The latter variable is defined as the angle between the bodyzero-lift line, along which the airspeed does not produceperpendicular forces, and the airspeed vector~va. By denotingthe angle between the zero-lift line and the thrust direction asµ, and the airspeed angle w.r.t.~ı0 asγ(xa), one has (Fig. 1):
α(xa, θ) := π + θ − γ(xa)− µ. (3)
whereγ(xa) = atan2(xa2 , xa1). For bodies that are symmet-ric w.r.t. the zero lift line, the functionscD(·, α) andcL(·, α)are even and odd functions respectively. In addition, thesecoefficients areπ-periodic functions if the body’s shape isalso symmetric w.r.t. a perpendicular of the zero lift line (inthis case we say that the shape is “bisymmetric”), i.e.
cD(·, α) = cD(·,−α), cL(·, α) = −cL(·,−α), (4a)
cD(·, α) = cD(·, α+ π), cL(·, α) = cL(·, α+ π). (4b)
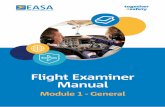
For low-subsonic regimes – Mach numbers smaller than0.4– the dependence of the aerodynamic characteristics uponM can be neglected [8]. Fig. 2 depicts a typical behaviorof the lift coefficient for the symmetric shape NACA 0021.The measurements (in blue) are obtained from [9] and [10].
At small angles of attack, the pressure decrease on theupper surface is much greater than the lower-surface pressureincrease . This difference produces a linear relation betweenα and the lift coefficient. As the angle of attack increases,it becomes difficult for the upper-surface flow to follow thesurface, and a small vortex is created above the wing, causingflow separation; when the upper-surface flow separates, pres-sure differential and lift are lost, and the wingstalls [1]. Thereduction of the lift coefficient for angles of attack exceedingthe stall angleαs is calledstall phenomenon.
A first approximation describing thelow frequency vari-ations of the experimental characteristics, and for whichimportant control results can be obtained [11], is given by
cL(α) = c1 sin(2α), (5)
cD(α) = cD0 + 2c1 sin2(α), (6)
with cD0 being the drag coefficient at zero-angle of attack,andc1 ∈ R. Observe that (5) and (6) satisfy (4). Fig. 2 showsa typical approximation result for the lift coefficient. Theapproximation result, in red, is good except for small anglesof attack (moduloπ) before the stall zone around±10◦.In particular, the model (5) does not characterize the initialhigh slope of the experimental lift coefficient, and the stallphenomenon. We will see that these discrepancies greatlyaffect the control problem associated with the dynamics (1).

-1.5
-0.75
0
0.75
1.5
0 50 100 150 200 250 300 350
Lift
coef
ficie
nts[−
](a)
0
0.25
0.5
0.75
1
1.25
0 5 10 15 20 25 30 35 40 45
Lift
coef
ficie
nts[−
]
α [o]
(b)
Re = 160 · 103
Eq. (5)
Fig. 2. Lift coefficient of NACA 0021: experimental data and model (5).
III. A MODEL FOR THE LIFT COEFFICIENT
An extension of the modeling function (5) that providesa better approximation of the experimental lift coefficientwhenα ∈ (−45◦, 45◦) is obtained by setting
cL(α) = cL1(α) sin(2α), (7a)
cL1(α) = c1 + c2 cos2c3(α)− c4 cos
2c5(α) sin2c6(α), (7b)
with c3, c5, c6, ∈ N, so that the bisymmetric constraints (4)are satisfied, andc1, c2, c4 ∈ R. Observe that for largeangles of attack, the coefficientcL1(α) is roughly givenby the constantc1 and, consequently, the lift models (5)and (7a) basically coincide for these angles. Therefore, itis tempting to choosec1 as specified in [11] by consideringthe experimental data for aerodynamic characteristics onlyat large angles of attack, i.e.
c1=
∑Ni=1 cLM
(αi) sin(2αi)+2(cDM(αi)−cD0) sin
2(αi)
4∑N
i=1 sin2(αi)
(8)
with α1, . . . , αN the values of the angle of attack for whichmeasurementscLM
(αi) andcDM(αi) are available, andα1 =
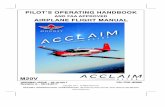
45◦ and αN = 135◦. The coefficientsc2, . . . , c6 must bechosen so that the model (7) provides an approximation ofthe initial high slope of the experimental lift coefficient,andof the stall phenomenon. Besides numerical techniques thatcan be used to determine these coefficients, we observe thatthe experimental lift achieves two stationary points whenα ∈[0, 45): one at the stall angleαs (local maximum) and oneat thecritic positive angleαc (local minimum). Then, it isdesirable that the model (7) satisfies
c′L(αs) = 0 (9a)
cL(αs) = cLM(αs), c′L(αc) = 0, cL(αc) = cLM
(αc). (9b)
To obtain an approximation of the initial slope of theexperimental lift coefficient, it suffices to impose
c′L(0) = CLα, (10)
-1.5
-0.75
0
0.75
1.5
0 50 100 150 200 250 300 350
(a)
0
0.25
0.5
0.75
1
1.25
0 5 10 15 20 25 30 35 40 45
α [o]
(b)
Re = 160 · 103
Eqs. (7)
Fig. 3. Lift coefficient of NACA 0021: experimental data and model (7).
whereCLαis supposed to be known from experimental data.
In general, the coefficientsc3, c5 andc6 that make the aboveconstraints satisfied are not integer numbers. A first attemptto satisfy the constraints (9)−(10) withc3, c5, c6 ∈ N is givenby the following choices:
c2 =CLα
2− c1, (11a)
c3 = round
(CLα
1− 2α2s
6c2α2s
), (11b)
q1(α) := c1 + c2 cos2c3(α) −
cLM(α)
sin(2α)(11c)
q2 := c2c3 cos2c3(αc)− cLM
(αc)cot(αc)
2 sin2(αc), (11d)
c5 = round
(q2
q1(αc)+ c6 cot
2(αc)
), (11e)
c6 = round
0.5 log
(q1(αc)
q1(αs)
)−
q2q1(αc)
log
(cos(αc)cos(αs)
)
log
(sin(αc)sin(αs)
)+cot2(αc) log
(cos(αc)cos(αs)
)
(11f)
c4 =q1(αs)
cos2c5(αs) sin2c6(αs)
. (11g)
The coefficientc2 follows directly from (10). The coefficientc3 has been obtained by imposing (9a) upon the third orderTaylor expansion (atα = 0) of model (7a) . Finally, the co-efficientsc4, c5 andc6 have been obtained by imposing (9b)upon the model (7a). Then, we have rounded off to thenearest integer numbers the obtainedc3, c5, c6. Fig. 3, whichdepicts a typical approximation result for the lift coefficient,shows that the approximation result is “good” everywhere.This figure is depicted by using the model (7) along with
c = (0.943, 1.789, 11, 8225.4, 27, 3, 0.0139), (12)
where c := (c1, c2, c3, c4, c5, c6, cD0), and c1 . . . c6 givenby relations (8) and (11) in turn evaluated according to theexperimental data shown in Fig. 2 (in blue).

IV. STALL RELATED CONTROL ISSUES
When the aerodynamic characteristics are given by amodel as simple as (5)−(6), it is possible to recast theasymptotic stabilization problem into the one of controllinga spherical body [11], thus allowing for the application ofprevious control design methods. However, an importantweakness of the aforementioned model is that it does notaccount for the stall phenomenon. Taking it into account addsconsiderable complexity to the vehicle’s dynamics, especiallyin the case of a vehicle moving within a fluid endowed witha large Reynolds number for which the stall phenomenoncan no longer be neglected [12]. We show below that thisphenomenon perturb the structural properties of the systemdynamics (1) such as existence, multiplicity and continuity ofequilibrium points. We assume low-subsonic flow and fixedReynolds number, thus considering only theα dependenceof cL and cD. In view of (3), this in turn implies thatFa
only depends on the airspeedxa and on the orientationθ.
A. Existence of equilibrium orientations
Let xr(t) denote a reference trajectory. Then, in viewof (1), the tracking error dynamics are governed by:
˙x = R(θ)v, ; (13)˙v = −ωSv−ue1+R(θ)T f(x, θ, t), θ = ω, (14)
whereu := T/m, fa := Fa/m,
f(x, θ, t) := ge1 + fa(xa, θ)− xr(t), (15)
x:=x−xr is the position tracking error, andv := RT (x−xr)is the velocity error in the body-fixed frame.
Asymptotic stabilization of tracking errors to zero requiresthe existence ofequilibrium orientations, i.e. valuesθe thatmake (x, v, θ)=(0, 0, θe) an equilibrium point of System(13)-(14). In particular, Eq (14) indicates thatv ≡ 0 implies:
−ue1 +R(θ)T f(x, θ, t) = 0. (16)
Thus, in order to guarantee the existence of the equilibriumstatev = 0, the following conditions must be satisfied:
〈e1, RT f〉=ue, (17a)
〈e2, RT f〉= f2(xr , θ, t) cos(θ)−f1(xr , θ, t) sin(θ)= 0, (17b)
whereue is the value of the control inputu at v = 0. Ingeneral, the existence of anequilibrium orientationθ =θe(t) that satisfies Eq. (17b) is not ensureda priori. Itdepends on the nature off , and more precisely on theθ-dependence of the aerodynamic accelerationfa. For instance,when fa does not depend onθ, or is given by (2) withthe aerodynamic characteristics as (5)−(6), there alwaysexists equilibrium angleθe. The next lemma guarantees theexistence of the equilibriumθe(t) when the bisymmetric lift-and-drag properties (4) are satisfied.
Lemma 1 If the aerodynamic characteristicscL(α) andcD(α) are continuousπ-periodic functions (as in the caseof bisymmetric body shapes) andxr is differentiable, thenthere exists at least one equilibrium orientation curveθe(t),i.e. ∃ θe(t) such that Eq.(17b) with θ=θe(t) is satisfied∀t.
The proof of this Lemma is given in Appendix A.The problem of seeking the equilibrium orientations is
equivalent to the problem of finding the valuesθe(t) suchthatw|θ=θe(t) = 0 with
w := 1g〈e2, R(θ)T f(xr, θ, t)〉. (18)
In view of Eq. (3), the orientationθ in the above expressioncan be replaced by
θ = αr − π + γ(xrw(t)) + µ, (19)
wherexrw(t) = xr(t)− xw(t). Then, the problem is to findthe theequilibrium angles of attackαe(t) such thatαr =αe(t) yieldsw = 0.
B. Ill-conditioning of the asymptotic stabilization problemresulting from multiple equilibrium orientations
This section shows how the existence of multipleequilibrium orientations can lead to an ill-conditionedasymptotic stabilization problem. For the sake of simplicity,we assume that no wind is blowing, i.e.|xw| ≡ 0, and thatµ = 0, i.e. ~T is aligned to the zero-lift direction.
1) Horizontal flight:desired horizontal flight implies that
xr = ν(0, 1)T , (20)
where ν denotes a constant, here assumed to be positive.Under the assumptions of no wind andµ = 0, Eq. (18),combined with (19) and (20), becomes
w(αr, aν)=[1−aνcL(αr)] cos(αr)−aνcD(αr) sin(αr), (21)
whereaν is a dimensionless numberdefined as
aν :=kaν
2
mg. (22)
with ka = 12ρΣ. The dimensionless property ofaν can
be used to determinedynamic similitudebetween differentcases. For instance, two different aircraft admit the sameequilibrium orientations at givenν if: i) the airplanes’geometries and weights provide the same values foraν ; ii)the wings’ profiles together with flight conditions, whichdetermineRe, provide the same aerodynamic characteristics.
Because of the non-linearities of the stall phenomenon, theproblem of finding the explicit expression of the equilibriumanglesαe = φ(aν) from w(αe, aν) = 0 does not have astraightforward solution. A pattern of equilibrium anglesαe
can be found by drawing the functionw(αr , aν) versusαr
for different values of the constantaν . Fig. 4(a) depicts thefunction (21) evaluated with the aerodynamic characteristicsgiven by (6) and (7) which are in turn evaluated with thecoefficientsc1 . . . c6, cD0 given by (12) .
By inspection, we see that the equilibrium angleαe isnot unique when the reference velocityν is such thataνbelongs to a neighborhood of the value1.36. The loss of theθe−uniqueness for these velocities is due to the change ofslope of the functionw(αr , aν). With an eye to Eq. (21), wededuce that this change of slope is essentially caused by the

-1
-0.5
0
0.5
1w(α
r,a
ν)
(a)
-1
-0.5
0
0.5
1
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70
w(α
r,a
ν,t)
αr [o]
(b)
αe(t)
αe(t1)
αe(t2)αe(t3)
αe(t4)
aν = 0.50aν = 1.00aν = 1.36aν = 2.00
t = t1t = t2t = t3t = t4
Fig. 4. (a): Eq. (21) for severalaν ; (b): αe(t) at four time instants.
nonlinearities of the stall phenomenon, since the initial highslope of lift and the following lift reduction produce abruptoscillations of the functionw(αr , aν).
A consequence of the existence of several equilibria is thata continuous reference velocity profile may not correspondto acontinuous orientation profileθe(t). Then, the referencetrajectory xr(t) could be perfectly tracked, i.e. (x, ˙x) =(0, 0) ∀t, only if instantaneous variations of the attitudeθwere admissible, and this is clearly not feasible in practice.Also, the continuity of the equilibrium orientationθe(t) is anecessary condition for the asymptotic stabilization problemto be well posed. This problem requires, in fact, that thecontrol inputω at the equilibrium configuration, namelyω =θe(t), is defined for any timet, and this is not the case ifθe(t)is discontinuous. The fact that the continuity of the referencevelocity xr(t) does not in general imply the continuity of theequilibrium orientationθe(t) is visually clear from Fig. 4(b)when consideringtransition maneuversbetween hoveringand high-velocity cruising. For example, consider a referencehorizontal velocity whose norm increases monotonically, i.e.
xr = ν(0, t)T , (23)
with ν a positive number. On the time intervalt ∈ (0, t1)(see Fig. 4(b)), the equilibrium angleαe is large because thehorizontal reference velocity is of small intensity (almostvertical configuration). As time goes by, the intensity ofthe reference velocity increases, and this in turn impliessmaller values of the angle of attack at the equilibriumconfiguration. At timet3, the equilibrium attitudeαe(t)instantaneously jumps from19◦ to 8◦. Such a discontinuityrenders the asymptotic stabilization problem ill-conditionedand, consequently, it does not exist a local stabilizer thatmakes the reference velocity (23) asymptotically stable.
020406080
100120140160180
0 20 40 60 80 100 120 140 160 180
γr[o]
αr [o]
aν = 0.25aν = 0.50aν = 0.75aν = 1.00aν = 1.25aν = 1.36aν = 2.00
Fig. 5. Level curvesw(αr, γr , aν) = 0.
2) Other velocities directions:assume now that the reference velocityxr is of the form
xr = ν(cos(γr), sin(γr)
)T, (24)
with ν ∈ R+ and γr ∈ S1 two constant values. Under theassumptions of no wind andµ = 0, Eq. (18), combinedwith (19) and (24), becomes
w = aν [cD(αr) sin(γr)−cL(αr) cos(γr)] cos(αr+γr) (25)
+[1−aν(cL(αr) sin(γr)+cD(αr) cos(γr))
]sin(αr+γr),
where the dimensionless positive constantaν is still givenby Eq. (22). Because of the aforementioned difficulties infinding the expression of the equilibrium anglesαe, the cou-ples (αe, γr) such thatw(αe, γr, aν) = 0 can be identifiedby drawing the level curves{(αe, γr) : wν(αe, γr) = 0}for different values of the constantaν . Figs. 5 depicts thesecurves by using the aerodynamic characteristics given by (6)and (7) in turn evaluated withc1 . . . c6, cD0 given by (12).
To illustrate how these curves can be used, focus onthe level curve associated withaν = 1.36, and fix thereference velocity directionγr at 80◦. Imagine now ahorizontal line drawn at this angle. Then, the equilibriumanglesαe are given by the intersection of this virtual lineand the level curve, namelyαe1 ≈ 11◦, αe2 ≈ 14◦ andαe3 ≈ 23◦. Repeating this simple procedure, we find outthat the system admit three equilibrium orientations as longas γr ∈ [42◦, 100◦]. Consequently, the stall phenomenoninduces several equilibrium orientations not only in cruisingflight, but also for other reference velocity directions. Hence,there exist discontinuous equilibrium orientations associatedwith generic continuous reference velocityxr(t).
The problem of characterizing the reference trajectoriesassociated with continuous orientation profiles is beyondthe scope of the present paper, and it will be addressed infuture studies. In this respect, we believe that the trajectoriesrepresenting the transition maneuvers between hovering andcruising flight for convertible vehicles must guarantee theexistence of a continuous equilibrium orientation profile.
Simulations show that the equilibria analysis performedwith experimental data for the aerodynamic characteristics(lift shown in Fig. 2, for drag see [10] or [11]) is basicallyequivalent to the one performed with (6)−(7) and (12).

V. BASICS OF THE CONTROL DESIGN:VELOCITY CONTROL
Given a reference velocity, assume the continuity of theequilibrium orientationθe(t), which in turn implies theasymptotic stabilization problem be well posed. Under thiscondition, we propose feedback controllers ensuring theasymptotic stabilization of this reference velocity. Defineka := ka/m and
Λ := R(θ)[sin(θ) − cos(θ)
0 0
], (26a)
fp := fa + ka|xa|Λ(θ) [c′LS − c′DI] xa, (26b)
fv := ge1 + fp(xa, θ)− xr(t). (26c)
We make the following assumption.
Assumption 1 There exists an equilibrium orientationθe(t)∈C0 andδ ∈R+, such that|fv(xr(t), θe(t), t)|>δ, ∀t∈R+.
As a consequence, one obtains the following result.
Proposition 1 If Assumption 1 is satisfied, then the equilib-rium orientationθe(t) is locally unique, i.e. for anyt ∈ R+
there exists a neighborhoodUt of θe(t) such that
〈e2, R(θ)T f(xr(t), θ, t)〉 6= 0, ∀θ ∈ Ut \ {θe(t)}
The proof of this Proposition is given in Appendix B.Based on Assumption 1, a solution to the local asymptoticstabilization problem ofv to zero can be proposed.
Proposition 2 Assume the following regularity conditions:(i) fp is continuously differentiable and its partial deriva-
tives are bounded uniformly w.r.t.xa in compact sets,(ii) the vectorsxw, xw,
...xw, xr , xr and
...xr are bounded in
norm onR+.Let ki > 0, i = {1, 2, 3} and apply the control
u = k1|fv|v1 + f1, (27a)
ω = kv
[k2|fv|v2 +
k3|fv |fv2
(|fv|+fv1)2
−fTv Sfδ|fv |2
], (27b)
to System(14) with f = RT f , f given by(15), fv = RT fv,fv by (26c),
fδ := ∂xafp[x− xw]−
...xr(t),
x given by(1) and kv by:
kv = kv(xa, θ) :=
[1− f2
eT2 RT dfa|fv |2
]−1
, (28)
withdfa := ∂2
θfa − 2S∂θfa. (29)
Suppose that:(i) The aerodynamic characteristicscL(α) and cD(α) are
continuousπ-periodic functions, so that Lemma 1 holds,(ii) Assumption 1 is satisfied withfv given by(26c).Then,
(i) the control laws(27) are well defined in the neighbor-hood of the reference velocity,
(ii) (v, θ)= (0, θe(t)) is a locally asymptotically stableequilibrium point of System(14).
The proof of this result is given in Appendix C. It followsfrom (28) thatkv is equal to one when the aerodynamicforcesfa do not depend on the attitudeθ, i.e. ∂θfa ≡ 0 ⇒dfa ≡ 0. In this case, the control law (27) coincides withthe velocity control presented in [7, III B.] (when adaptedto the 2D case) which is derived by using the sphericalbody assumption, i.e.∂θfa ≡ 0. Then, we view (27) as anextension of the velocity control presented in [7, III B.]. Inaddition, observe thatdfa ≡ 0 also when the aerodynamiccharacteristicscL and cD are given by (5)-(6). In fact, inview of (3) one has∂θfa = ∂αfa, which in turn implies
dfa = ka|xa|[(c′′L + 2c′D)S − (c′′D − 2c′L)I
]xa.
This relation is a(2×1) null-vector when evaluated with themodel (5)-(6) since it satisfiesc′′L+2c′D≡0 andc′′D−2c′L≡0.Then, it is possible to verify that the law (27) also includesthe control result presented in [11] when the velocity con-trol [7, III B.] is applied to the transformed system.
The domain of attraction of the equilibrium point(v, θ) =(0, 0) is related to the set on whichk−1
v 6= 0, which is in turnrelated to theθ-variations of the aerodynamic forcesfa (viadfa). This suggests a relation between the stability constraintk−1v 6= 0 and the stall phenomenon, typically associated with
large variations of lift forces w.r.t. the angle of attack.In practice, the control law (27) must be complemented
with integral correction terms in order to compensate foralmost constant unmodeled additive perturbations. Let
Iv :=
∫ t
0
˙x(s) ds ,
and h denote a smooth bounded strictly positive functiondefined on[0,+∞) satisfying the properties [7, Sec. III.C].It then suffices to replace the definitions off andfv by:
f := ge1 + fa − xr + h(|Iv|2)Iv (30a)
fv := ge1 + fp − xr + h(|Iv|2)Iv (30b)
in (27) to obtain a control which incorporates an integralcorrection action and for which local asymptotic stabilityand convergence can still be proven.
The control law (27b) uses terms that may introducesingularities. To provide a control law that is well-definedeverywhere, we modify the expression (27b) by settingkv ≡1 and by multiplying the terms1/(|fv|+ fv1
)2 and1/|fv|2
by an adequate function. The choice of fixingkv = 1 isjustified by the fact that it is equal to one close to thereference trajectory (f2 ≈ 0). Doing so we do not destroythe local stability property of Proposition 2. As for theaforementioned function, we can use the classC1 functionµτ : [0,+∞) → [0, 1] defined by:
µτ (s) =
{sin
(πs2
2τ2
), if s ≤ τ
1, otherwise(31)
with τ > 0. This yields the well-defined control expression
u = k1|fv|v1 + f1,
ω = k2|fv|v2+µτ (|fv|+fv1)
k3|fv|fv2
(|fv |+fv1)2−µτ (|fv|)
fTv Sfvδ|fv |2
.

ACKNOWLEDGEMENT
The author thanks Glauco Scandaroli for the useful discus-sions during the development of this project. Special thanksto Pascal Morin, Tarek Hamel and Claude Samson for theirexceptional help in the conception of this work.
REFERENCES
[1] R. F. Stengel,Flight Dynamics. Princeton University Press, 2004.[2] C. M. Belcastro and J. V. Foster, “Aircraft loss-of-control accident
analysis,”Control, no. August, pp. 1–41, 2010.[3] J. Hauser, S. Sastry, and G. Meyer, “Nonlinear control design for
slightly non-minimum phase systems: application to v/stolaircraft,”Automatica, vol. 28, pp. 665–679, 1992.
[4] L. Marconi, A. Isidori, and A. Serrani, “Autonomous vertical landingon an oscillating platform: an internal-model based approach,” Auto-matica, vol. 38, pp. 21–32, 2002.
[5] A. Isidori, L. Marconi, and A. Serrani,Robust autonomous guidance:an internal-model based approach.Springer Verlag, 2003.
[6] P. Castillo, R. Lonzano, and A. E. Dzul,Modelling and Control ofMini-Flying Machines. Springer Verlag, 2005.
[7] M. Hua, T. Hamel, P. Morin, and C. Samson, “A control approachfor thrust-propelled underactuated vehicles and its application to vtoldrones,”IEEE Transactions on Automatic Control, vol. 54, pp. 1837–1853, 2009.
[8] J. Anderson,Fundamentals of Aerodynamics, 5th ed. Mcgraw HillSeries in Aeronautical and Aerospace Engineering, 2010.
[9] R. E. Sheldahl and P. C. Klimas, “Aerodynamic characteristics of sevensymmetrical airfoil sections through 180-degree angle of attack foruse in aerodynamic analysis of vertical axix wind turbines,” SandiaNational Laboratories, Tech. Rep., 1981.
[10] CYBERIAD, http://www.cyberiad.net/foildata.htm, Cyberiad is a teamof Australian-based consultants providing mathematical,engineering,educational, administrative, and statistical services.
[11] D. Pucci, T. Hamel, P. Morin, and C. Samson, “Nonlinear control ofPVTOL vehicles subjected to drag and lift,” inIEEE Conf. on Decisionand Control (CDC), 2011, pp. 6177 – 6183.
[12] Zhou, M. Alam, Yang, Guo, and Wood, “Fluid forces on a very lowReynolds number airfoil and their prediction,”Internation Journal ofHeat and Fluid Flow, vol. 21, pp. 329–339, 2011.
APPENDIX
A. Proof of Lemma 1
The definition (3) implies thatα(xa, θ+π) = α(xa, θ)+πwhich, together with the assumption ofπ-periodicity of theaerodynamics characteristics, in turn implies
Fa(xa, θ+π)=ka|xa|[cL(·)S−cD(·)I
]∣∣α+π
xa = Fa(xa, θ).
This fact in turn implies thatf(x, θ + π, t) = f(x, θ, t),wheref is given by (15). From there, one verifies that
〈e2, R(θ)T f(xr, θ, t)〉 = −〈e2, R(θ+π)T f(xr, θ+π, t)〉.
Then, the proof of the existence of an equilibrium orientationθe(t) such that〈e2, R(θe(t))
T f(xr(t), θe(t), t)〉 = 0 ∀t is adirect application of theintermediate value theoremsince, byassumption,f is defined∀t (xr is differentiable), and alsocontinuous versusθ (cL andcD are continuous).
B. Proof of Proposition 1
First, it follows from (15) and (26) that
fv2= 〈e2, R
T fv〉 ≡ 〈e2, RTf〉 = f2, (32)
since〈e2, RTΛ〉 = 0. Equality (32) implies that
∂θ〈e2, RT f〉 = 〈e2, R
T∂θfv〉 − 〈e2, SRT fv〉. (33)
Given Λ and fv as in (26a) and (26c), one can verify that∂θfv = ∂θfp = Λ
[∂2θfa − 2S∂θfa
], which implies
〈e2, RT∂θfv〉 = 〈e2, R
T∂θfp〉 ≡ 0. (34)
Substituting (34) in (33) yields
fv1= 〈e1, R
Tfv〉 = − ∂θ〈e2, RT f〉. (35)
Now, a sufficient condition for the local uniqueness of theequilibrium orientationθe(t) is
∂θ〈e2, R(θ)T f(xr(t), θ, t)〉∣∣∣θ=θe(t)
6= 0, ∀t ∈ R+. (36)
From Assumption 1, one has that|fv|2 never vanishesat the equilibrium configuration. Let us recall that at thisconfiguration one hasf2 ≡ 0. Now observe that
|fv|2 = |fv|
2 = f2
v1+ f
2
v2= f
2
v1+ f
2
2.
In view of (35) and Assumption 1, at the equilibrium onehas |fv|
2 = f2
1 = (∂θ〈e2, RT f〉)2 > 0. This suffices to
prove (36).
C. Proof of Proposition 2
Given (32), System (14) can be rewritten as
˙v = −ωSv − upe1 +RT fv, θ = ω, (37)
whereup := u + fv1− f1 andfv = RT fv, f = RT f . Let
θ ∈ (−π, π] denote the angle between the two unit vectorse1 andfv/|fv|, so that|fv| cos(θ) = fv1
. Then, the controlobjective is the asymptotic stabilization ofθ to zero. Considerthe candidate Lyapunov functionV defined by:
V = 12 |v|
2 + 1k2
(1−
fv1
|fv |
). (38)
Via direct calculations one can verify that
d
dt
(1−
fv1
|fv |
)= −
fv2
k2|fv |
(ω +
fTv Sfv|fv|2
). (39)
In view of fv = ∂xafp [x − xw] + ∂θfp ω −
...xr, (39) and
the definition ofup, V along the solutions of System (37) is
V = v1(f1−u)−fv2
k2|fv |
[(1+
fTv S∂θfp|fv|2
)ω+
fTv Sfδ|fv |2
−k2|fv|v2
].
Now, in view of Eq. (34), the term multiplyingω is:
1+fTv S∂θfp|fv |2
= 1+fT
v SRT ∂θfp|fv|2
= 1+fv2
eT1 RT ∂θfp|fv |2
, (40)
which is clearly different from zero close to the equilibriumpoint (i.e. fv2
≈ 0). In view of (27), (28), (32), (40) andthe fact thateT1 R
T∂θfp = −eT2 RTdfa, one verifies that the
obtained expression forV is:
V=−k1|fv|v21 −
k3f2v2
k2(|fv |+fv1)2
= −k1|fv|v21 −
k3
k2tan2( θ2 ).
since tan2(θ/2) =f2v2
(|fv |+fv1)2
.
BecauseV is negative semi-definite, the velocity error termv is bounded. The next step of the proof consists in showingthe uniform continuity ofV along every system’s solutionand, using Barbalat’s lemma, one deduces the convergenceof v and θ to zero. This part of the proof is omitted since itis similar to the proof developed in [7, Appendix C].