Unknown input observation via sliding modes : application to vehicle contact forces
6
Unknown input observation via sliding modes : application to vehicle contact forces O. Khemoudj, H. Imine and M. Djema¨ ı Abstract— In this paper, a method to estimate vehicle contact forces for trucks by the use of sliding mode observation tools is presented. The purpose is to use non linear observers and consider contact forces as unknown inputs for the model. We use both a bicycle model to derive the longitudinal and lateral forces and an axle model validated with a software simulator to obtain the vertical forces. I. I NTRODUCTION The aim of the estimation of the contact forces for vehi- cles is to provide a sufficient knowledge of the interaction between the vehicle and the pavement in order to avoid road and vehicle damage (tyre, suspension, fragile payload) and to enhance security by preventing rollover of trucks. The problem of estimating vehicle contact forces is considered in many previous works. We can cite [7] who applied an Extended Kalman Filter (EKF) to estimate the longitudinal and lateral forces in a vehicle bicycle model, the forces are considered as additionnal states and their dynamics are modelled by the use of a shaping filter driven by white noise. In the same way [9] have developped an estimation algorithm for an off-highway mining truck, an EKF is used to estimate the longitudinal, lateral and vertical forces for a four-wheel vehicle model. The main limitation of this approach is that some assumptions have to be made on the behaviour of the forces when tuning the shaping filter, this requires to know exactly the nature of the forces. Mainly in litterature, the developped methods consist of estimating the forces through the estimation of dynamic variables of the vehicle. [2], [6] developped sliding mode observers for heavy vehicles. They estimate the height of the wheel hub, then by measuring the road profile, the tyre deflection is calculated by assuming the linear stiffness of the tyre, they get an estimation of the vertical force, then they calculate the longitudinal and lateral forces using the Pacejka experimental tyre model. This method involves knowing accurately the parametres of the vehicle and the pneumatic and also to measure the road profile. Another way to estimate the forces is to use strain gauges either in a hub which is a precise but expensive solution or in the axle bar, this last method is limited to straight constant speed manoeuvres and doesn’t suite to cornering manœvres O. KHEMOUDJ and H. IMINE are with Laboratoire Central des Ponts et Chauss´ ees, LEPSIS, UMR LCPC/INRETS, 58 Bd Lefebvre, 75732, Paris 15, France. [email protected], [email protected] M. DJEMAI is with Univ Lille Nord de France, F- 59000 Lille, France ; UVHC, LAMIH, F-59313 Valenciennes, France, CNRS, UMR 8530, F-59313 Valenciennes, France. [email protected] with large lateral forces [4]. The method we propose here is to use a sliding mode observer to evaluate the forces. We then consider these forces as unknown inputs of the system on this basis we use sliding mode observers and the main embedded sensors [1] in the vehicle and finally we estimate the vertical forces. The advantage of this approach is to avoid the use of many parameters of the vehicle (usually unkonwn), to make use of the available sensors in the vehicle and to present a good alternative to the use of strain gauges especially while cornering. This paper is divided into three main sections. In the first section, we describe the used models and give also give their limitation and the taken assumptions, in the second section we present the estimation methods and the simulation results, we finally conclude with some perspectives in the last section. II. MODEL DESCRIPTION To be able to develop observers and to validate our ap- proach, we use an observable non linear model as described in [9]. It is known as the bicycle model. We are interested in 2-axle rigid body trucks such as tractors and straight trucks (example mining truck). A representation of the model is given in the figure 1. As we can see in this latter figure, the front and rear wheels are lumped into one front and one rear wheel where total front and real longitudinal and lateral forces are respectively applied to each wheel. Note that this model is valid for lateral acceleration to 0.3g and is used frequently in litterature to study vehicle trajectory stability. As the validation of this model in the simulator gives satisfactory results we can then use it for a state estimation purpose. Fig. 1. Bicycle model. To complete this model, we have to introduce the vertical forces. To achieve that, the idea is to isolate the axle and to represent the forces acting over it. In figure 2 we represent a truck-axle and the main acting forces. This model makes the junction between the slow dynamics of the chassis (rolling and pitching) which are captured by the suspension forces 18th IEEE International Conference on Control Applications Part of 2009 IEEE Multi-conference on Systems and Control Saint Petersburg, Russia, July 8-10, 2009 978-1-4244-4602-5/09/$25.00 ©2009 IEEE 1720
Transcript of Unknown input observation via sliding modes : application to vehicle contact forces

Unknown input observation via sliding modes : application to vehicle
contact forces
O. Khemoudj, H. Imine and M. Djemaı
Abstract— In this paper, a method to estimate vehicle contactforces for trucks by the use of sliding mode observation toolsis presented. The purpose is to use non linear observers andconsider contact forces as unknown inputs for the model. Weuse both a bicycle model to derive the longitudinal and lateralforces and an axle model validated with a software simulatorto obtain the vertical forces.
I. INTRODUCTION
The aim of the estimation of the contact forces for vehi-
cles is to provide a sufficient knowledge of the interaction
between the vehicle and the pavement in order to avoid road
and vehicle damage (tyre, suspension, fragile payload) and
to enhance security by preventing rollover of trucks. The
problem of estimating vehicle contact forces is considered
in many previous works. We can cite [7] who applied an
Extended Kalman Filter (EKF) to estimate the longitudinal
and lateral forces in a vehicle bicycle model, the forces
are considered as additionnal states and their dynamics are
modelled by the use of a shaping filter driven by white noise.
In the same way [9] have developped an estimation algorithm
for an off-highway mining truck, an EKF is used to estimate
the longitudinal, lateral and vertical forces for a four-wheel
vehicle model. The main limitation of this approach is that
some assumptions have to be made on the behaviour of the
forces when tuning the shaping filter, this requires to know
exactly the nature of the forces.
Mainly in litterature, the developped methods consist of
estimating the forces through the estimation of dynamic
variables of the vehicle. [2], [6] developped sliding mode
observers for heavy vehicles. They estimate the height of
the wheel hub, then by measuring the road profile, the tyre
deflection is calculated by assuming the linear stiffness of the
tyre, they get an estimation of the vertical force, then they
calculate the longitudinal and lateral forces using the Pacejka
experimental tyre model. This method involves knowing
accurately the parametres of the vehicle and the pneumatic
and also to measure the road profile.
Another way to estimate the forces is to use strain gauges
either in a hub which is a precise but expensive solution or
in the axle bar, this last method is limited to straight constant
speed manoeuvres and doesn’t suite to cornering manœvres
O. KHEMOUDJ and H. IMINE are with Laboratoire Centraldes Ponts et Chaussees, LEPSIS, UMR LCPC/INRETS, 58 BdLefebvre, 75732, Paris 15, France. [email protected],[email protected]
M. DJEMAI is with Univ Lille Nord de France, F-59000 Lille, France ; UVHC, LAMIH, F-59313 Valenciennes,France, CNRS, UMR 8530, F-59313 Valenciennes, [email protected]
with large lateral forces [4].
The method we propose here is to use a sliding mode
observer to evaluate the forces. We then consider these
forces as unknown inputs of the system on this basis we use
sliding mode observers and the main embedded sensors [1]
in the vehicle and finally we estimate the vertical forces.
The advantage of this approach is to avoid the use of many
parameters of the vehicle (usually unkonwn), to make use
of the available sensors in the vehicle and to present a
good alternative to the use of strain gauges especially while
cornering. This paper is divided into three main sections. In
the first section, we describe the used models and give also
give their limitation and the taken assumptions, in the second
section we present the estimation methods and the simulation
results, we finally conclude with some perspectives in the last
section.
II. MODEL DESCRIPTION
To be able to develop observers and to validate our ap-
proach, we use an observable non linear model as described
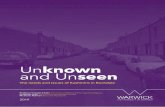
in [9]. It is known as the bicycle model. We are interested in
2-axle rigid body trucks such as tractors and straight trucks
(example mining truck). A representation of the model is
given in the figure 1. As we can see in this latter figure,
the front and rear wheels are lumped into one front and
one rear wheel where total front and real longitudinal and
lateral forces are respectively applied to each wheel. Note
that this model is valid for lateral acceleration to 0.3g and
is used frequently in litterature to study vehicle trajectory
stability. As the validation of this model in the simulator
gives satisfactory results we can then use it for a state
estimation purpose.
Fig. 1. Bicycle model.
To complete this model, we have to introduce the vertical
forces. To achieve that, the idea is to isolate the axle and to
represent the forces acting over it. In figure 2 we represent a
truck-axle and the main acting forces. This model makes the
junction between the slow dynamics of the chassis (rolling
and pitching) which are captured by the suspension forces
18th IEEE International Conference on Control ApplicationsPart of 2009 IEEE Multi-conference on Systems and ControlSaint Petersburg, Russia, July 8-10, 2009
978-1-4244-4602-5/09/$25.00 ©2009 IEEE 1720

and the rapid dynamics due to irregularities in the pavement
surface which are captured by the accelerations.
Fig. 2. Forces applied on the truck-axle
Remark 1. the suspension forces can be measured by the
use of a pressure transducer because of the proportionality
between the force and pressure in air-springs [4].
The equations of movement of the free body are given by:
Fz,l + Fz,r = Fs,l + Fs,r + Ma.g + Ma.a (1)
and
Fz,l.ℓ + Fz,r.ℓs = Fz,r.ℓ + Fs,l.ℓs + Fy.r + Ia.aϕ (2)
with gravity acceleration g = 9.81m/s2. Fz,l and Fz,r
the vertical wheel forces at the left and at the right of the
axle. Fs,l and Fs,r the suspension forces at the left and the
right of the axle. Fy the resultant lateral force i.e. the sum
of the left and right lateral tyre-force applied to the axle.
Me the mass of the axle. Ia the moment of inertia of the
axle around its roll axle. a the axle-hop acceleration. aϕ the
axle-roll acceleration. ℓ the distance between the point of
application of the tyre force and the center of gravity of the
axle. ℓs the distance between the point of application of the
suspension force and the center of gravity of the axle and
finally r the distance between the ground and the center of
gravity of the axle. In order to simplify the problem, we have
taken some assumptions :
Assumption 1. The roll center and the center of gravity
of the axle are the same.
Assumption 2. The axle is perfectly symetric .
Assumption 3. The distance r is constant and is equal to
wheel radius.
Assumption 4. The effects of anti-roll bars is neglegted.
We have validated this model by using a vehicle sofware-
simulator called PROSPER1([5]). For a curve manoeuvre, we
note that using this model, the vertical forces are correctly
tracked compared to the simulator forces as shown in the
figure 3. The vertical forces are composed of two distin-
guished dynamics, the slow dynamics due to the load while
conrnering and the rapid dynamics which are oscillations
caused by the pavement.
In the next section, we develop observers to estimate the
unknown contact forces, we proceed in two steps, the first
1PROSPER, Oktal, www.callasprosper.com
0 5 10 151.3
1.4
1.5
1.6
1.7
1.8
1.9
2
2.1
2.2x 10
4
time (s)
N
from prosperfrom model
0 5 10 151.8
1.9
2
2.1
2.2
2.3
2.4
2.5
2.6
2.7x 10
4
time (s)
N
from prosperfrom model
Fig. 3. Axle model validation with Prosper (top: left side vertical force,bottom: right side vertical force)
step is to estimate the longitudinal and lateral forces from
the bicycle model and in the second step we determine the
corresponding vertical forces.
III. SLIDING OBSERVER DESIGN
The input signal is composed of steering angle and the
total torques at the front and the rear of the vehicle. From
the model described in section II, we can derive the state-
space model. The system known inputs are respectively the
steering angle δ, the front total torque Tf and the rear total
torque Tr:
u =[
δ Tf Tr
]T(3)
The output signal Y is composed of the yaw rate α, the
front and rear wheels speeds respectively ωfw, ωrw, the
longitudinal and lateral acceleration respectively x, y :
Y =
αωfw
ωrw
x =1
Mt
(Frx + Ffx cos(δ) + Ffy sin(δ))
y =1
Mt
(Fry − Ffx sin(δ) + Ffy sin(δ))
(4)
where Ffx, Frx,Ffy and Fry are the resultant longitudinal
and lateral tyre forces respectively at the front and the rear
of the vehicle. Note that Mt is the total mass and Iz is the
total inertia about the vertical z-axis. Mfw, Mrw, Ifw and
Irw are the masses and rotational inertias of the front and
rear wheels. lf and lr the distances between the center of
gravity of the vehicle and respectively the front and the rear
axles.
1721

We devide the output vector Y =[
Xv Xa
]Tin two
vectors : Xv composed of velocities and Xa composed of
accelerations as follows : Xv =[
α ωfw ωrw
]Tand
Xa =[
x y]T
.
Xv =
−
lr
Iz
Fry −
lf
Iz
sin(u1)Ffx +lf
Iz
cos(u1)Ffy
rfw
Ifw
Ffx +1
Ifw
u2
rrw
Irw
Frx +1
Irw
u3
(5)
Remark 2. In practice, steering angle, yaw rate, wheel
rotational velocity, the lateral acceleration and the driving
torques are signals available on the CAN-bus of the vehicle.
The braking torque can be deduced from the brakes pressure
which is also availble at the CAN-bus, in our application,
we do not consider braking situations.
By considering the unknown forces vector which is com-
posed of the total front and rear longitudinal and lateral
forces.
uF =[
Ffx Frx Ffy Fry
]T(6)
The model can be written in this form
Xv = Bu + W1(u)uF
Y =
[
Xv
W2(u)uF
] (7)
with,
B =
0 0 0
01
Ifw
0
0 01
Irw
(8)
W1(u) =
−
lf
Iz
sin(u1) 0lf
Iz
cos(u1) −
lr
Iz
rfw
Ifw
0 0 0
0rrw
Irw
0 0
(9)
and
W2(u) =
1
Mt
cos(u1)1
Mt
1
Mt
sin(u1) 0
−
1
Mt
sin(u1) 01
Mt
cos(u1)1
Mt
(10)
u1 is the first component of the known input vector
u, namely the steering angle δ. It is well-known that the
acceleration of mechanical systems is directly correlated to
the forces applied to this system. We can notice it from
the equations describing vehicle dynamics (5). The idea
is to use the availble velocity measurments and to derive
the acceleration using a sliding mode observer. Once the
derivation achieved, we use an estimator derived from the
equations of the model to deduce the unknown forces.
A. First order observer
We begin by developping a first order observer to estimate
the accelerations. From equation (5), we write :
Xv = f(u, uF ) (11)
f ∈ R3 is a vector-field function assumed to be bounded.
The sliding observer is given by
ˆXv = f(u, uF ) + Ksign(Xv − Xv) (12)
K ∈ R3×3 is the observer diagonal positive matrix gain,
we define the estimation error of the velocity by Xv = Xv−
Xv Let V the Lyapunov candidate function of the velocity
error V =1
2XT
v Xv. The time derivative of V is given by
V = XTv
˙Xv. The error dynamics can be obtained by the
formula˜Xv = Xv −
ˆXv , so˜Xv = f(u, uF ) − (f(u, uF ) +
Ksign(Xv− Xv)), then˜Xv = f(u, uF , uF )−Ksign(Xv−
Xv) with f(u, uF , uF ) = f(u, uF ) − f(u, uF ). Finally,
V = XTv (f(u, uF , uF ) − Ksign(Xv)) (13)
To ensure the convergence of the observer, the condition
below must be satisfied.
Kii ≫
∣
∣
∣fi(u, uF , uF )
∣
∣
∣, i = 1, 2, 3 (14)
In this case, Xv converges to 0 in finite time and then˙Xv
converges also to 0 in finite time t0 > 0.
Simulation results : We have simulated a curve trajectory
with a constant streering angle. We injected longitudinal and
lateral forces in the model as unknown inputs. First, we
illustrate the estimation of the accelerations in the figures
4 and 5, (we only represent front wheel acceleration as the
rear wheel is a similar figure) then we present the estimation
of the forces. The results we obtain with this method are
illustrated in figure 6. We have made a zooming in the figure
7 to see more clearly the predominance of chattering. This
result is confirmed in figure 8 where the estimation error
is shown. Note that in the zooming figures, the thick line
corresponds to the model and the thin line to the estimation.
The estimation of the vertical forces is given in figure 9
Discussion : As we can see, the first order observer
introduces a large chattering in the estimates of longitudinal
and lateral forces. Globally, the vertical forces are tracked
with the presence of chattering as well. This is why we
use a second order sliding mode wich normally reduces the
chattering phenomenon.
1722

0 5 10 15−15
−10
−5
0
5
10
15
time (s)
rd/s
²
estimationmodel
7 7.1 7.2 7.3 7.4 7.5 7.6 7.7 7.8 7.9 8−2
−1.5
−1
−0.5
0
0.5
1
time (s)
rd/s
²
estimationmodel
Fig. 4. Estimation with first odrer observer of the yaw acceleration (top)and zooming of the figure (bottom)
0 5 10 15−200
−150
−100
−50
0
50
100
150
200
time (s)
rd/s
²
estimationmodel
7 7.1 7.2 7.3 7.4 7.5 7.6 7.7 7.8 7.9 8−30
−20
−10
0
10
20
30
time (s)
rd/s
²
estimationmodel
Fig. 5. Estimation with first order observer of wheel acceleration (top) andzooming of the figure (bottom)
B. Second order observer
We use in this section a robust second order observer [3].
In our case, we use the differentiator to estimate the accel-
erations from the velocity vector Xv which is measured. We
assume that Xv is bounded and differentiable. The robust
observer is given by :
{
ˆXv = Z + λ
∣
∣
∣Xv − Xv
∣
∣
∣
1
2
sign(Xv − Xv)
Z = αsign(Xv − Xv)(15)
0 5 10 15−2
−1
0
1
2x 10
4
N
Front longitudinal force
0 5 10 15−2
−1
0
1
2
3x 10
4
N
Rear longitudinal force
0 5 10 15−3
−2
−1
0
1
2
3x 10
4
time (s)
N
Front lateral force
0 5 10 15−3
−2
−1
0
1
2
3x 10
4
time (s)
N
Real lateral force
estimationmodel
Fig. 6. Estimation of longitudinal and lateral forces with first order observer
7 7.2 7.4 7.6 7.8 8−4000
−3000
−2000
−1000
0
1000
2000
N
Front longitudinal force
7 7.2 7.4 7.6 7.8 82000
3000
4000
5000
6000
7000
8000
N
Rear longitudinal force
7 7.2 7.4 7.6 7.8 80.9
1
1.1
1.2
1.3
1.4
1.5
1.6x 10
4
time (s)
N
Front lateral force
7 7.2 7.4 7.6 7.8 86000
7000
8000
9000
10000
11000
12000
time (s)
N
Real lateral force
estimationmodel
Fig. 7. Estimation of longitudinal and lateral forces with first order observer: zooming
Considering the known velocities to be locally bounded
and the observer based on the differentiator (15), for any
initial conditions Z(0), ˆXv(0) there exists a choice of α and
λ such that the observer error e = ˆXv−Xv tends to 0 in finite
time. The complete proof of this theorem is given in [8].
Hense, to get an estimation of the acceleration signal from
the velocities, we have to verify the sufficient conditions for
convergence of the differentiator. These conditions are upon
the gain diagonal matrices α ∈ R3×3 and λ ∈ R
3×3 which
are chosen such that for i = 1, 2, 3, we have :
αii > σ (16)
and
λii > (σ + αii)
√
2
αii − σ(17)
1723

5 6 7 8 9 10−3000
−2000
−1000
0
1000
2000
3000
NFront longitudinal force error
5 6 7 8 9 10−3000
−2000
−1000
0
1000
2000
3000
N
Rear longitudinal force error
5 6 7 8 9 10−5000
0
5000
time (s)
N
Front lateral force error
5 6 7 8 9 10−5000
0
5000
time (s)
N
Real lateral force error
Fig. 8. Error of estimation of longitudinal and lateral forces with first orderobserver
0 5 10 151.4
1.5
1.6
1.7
1.8
1.9
2x 10
5
N
Front left vertical force
0 5 10 151.6
1.7
1.8
1.9
2
2.1x 10
5
N
Front right longitudinal force
0 5 10 151.4
1.6
1.8
2
2.2x 10
5
time (s)
N
Rear left vertical force
0 5 10 151.9
2
2.1
2.2
2.3
2.4
2.5x 10
5
time (s)
N
Rear right vertical force
estimationmodel
Fig. 9. Estimation of vertical forces with first order observer
σ is the an upper bound of the jerks. By using the
differentiator, we want to derive numerically the velocity
vector, we are not interested in jerk estimation. Here we take
σ = 10. To estimate contact forces, we use the estimator
derived from model equations. For the longitudinal forces
we have the expressions
Ffx =1
rfw
(IfwˆXv(2) − u2)
Frx =1
rrw
(IrwˆXv(3) − u3)
(18)
and the lateral forces
Ffy =1
sin(u1)(MtXa(1) − Frx − Ffx cos(u1))
Fry =1
lr(−Iz
ˆXv(1) −
lf
sin(u1)Ffx +
lf
cos(u1)Ffy)
(19)
Note that if the steering angle u1 = 0, we suppose that
the lateral forces are negligible (straight line manoeuvre).
Simulation results : The estimated accelerations are il-
lustrated in figures 10 and 11. We have chosen α = 600and λ = 40 so that the conditions of convergence of the
differentiator are achieved, the results of longitudinal and
lateral force estimation are presented in figure 12. We used
the same conditions of simulation as for the first order
observer. We represent also the estimation error in figure
13.
0 5 10 15−15
−10
−5
0
5
10
15
time (s)
rd/s
²
estimationmodel
7 7.1 7.2 7.3 7.4 7.5 7.6 7.7 7.8 7.9 8−2
−1.5
−1
−0.5
0
0.5
1
time (s)
rd/s
²
estimationmodel
Fig. 10. Estimation with second order observer of the yaw acceleration(top) and zooming of the figure (bottom)
0 5 10 15−50
0
50
100
150
200
250
time (s)
rd/s
²
estimationmodel
7.9 7.91 7.92 7.93 7.94 7.95 7.96 7.97 7.98 7.99 8
−0.1
−0.05
0
0.05
0.1
0.15
time (s)
rd/s
²
estimationmodel
Fig. 11. Estimation with second order observer of wheel acceleration (top)and zooming of the figure (bottom)
The estimation of the vertical forces is given in figure 14.
Discussion : We can note that the chattering in the esti-
mated forces is considerably reduced. The estimation error
of the longitudinal and lateral forces is represented in figure
13.
1724

0 5 10 15−0.5
0
0.5
1
1.5
2
2.5x 10
4N
Front longitudinal force
0 5 10 150
0.5
1
1.5
2
2.5
3x 10
4
N
Rear longitudinal force
0 5 10 15−4
−3
−2
−1
0
1
2x 10
4
time (s)
N
Front lateral force
0 5 10 15−1
0
1
2
3
4x 10
4
time (s)
N
Real lateral force
estimationmodel
Fig. 12. Estimation of longitudinal and lateral forces with second orderobserver
9.9 9.92 9.94 9.96 9.98 10−20
−10
0
10
20
N
Front longitudinal force error
9.9 9.92 9.94 9.96 9.98 10−20
−10
0
10
20
N
Rear longitudinal force error
9.9 9.92 9.94 9.96 9.98 10−20
−10
0
10
20
time (s)
N
Front lateral force error
9.9 9.92 9.94 9.96 9.98 10−20
−10
0
10
20
time (s)
N
Real lateral force error
Fig. 13. Error of estimation of longitudinal and lateral forces with secondorder observer
The longitudinal forces errors have an absolute maximum
less than 10 N and lateral forces errors have an absolute max-
imum of 15 N which is insignificant compared to magnitude
of the forces, this is not the case for the first order estimator.
The chattering in the vertical forces is due to the estimation
error in lateral forces, we can notice that the chattering is
less important than the first order observer but it does not
modify considerably the shape of the force. Nevertheless, it is
preferable to use the second order for detecting peak vertical
forces, these peaks can be confused with the chattering when
we use the first order observer.
IV. CONCLUSION
In this paper, we have investigated a new way to de-
termine axle vertical forces by the use of unknown input
observers. We have used both a first and a second order
observer to estimate the longitudinal and lateral forces. We
have noted that the estimation quality is better by using a
0 5 10 151.4
1.5
1.6
1.7
1.8
1.9
2x 10
5
N
Front left vertical force
0 5 10 151.5
1.6
1.7
1.8
1.9
2
2.1x 10
5
N
Front right longitudinal force
0 5 10 151.4
1.6
1.8
2
2.2x 10
5
time (s)
N
Rear left vertical force
0 5 10 151.9
2
2.1
2.2
2.3
2.4
2.5x 10
5
time (s)
N
Rear right vertical force
estimationmodel
Fig. 14. Estimation of vertical forces with second order observer
second order observer. We have also proposed to use an axle
model to derive the vertical forces. Some perpectives of our
investigation is to develop a more sofisticated axle-model, to
extend the approach to other vehicle configurations (tri-axle,
semi-trailer) and to evaluate the performance of other kind
of observers such as higher order observers and high gain
observers.
V. ACKNOWLEDGMENTS
The present research work has been in part supported
by International Campus on Safety and Intermodality in
Transportation the Nord-Pas-de-Calais Region, the European
Community, the Regional Delegation for Research and Tech-
nology, the Ministry of Higher Education and Research, and
the National Center for Scientific Research.
REFERENCES
[1] K. Bouibed, A. Aitouche, A. Rabhi, and M. Bayart. Estimation ofcontact forces of a four-wheel steering electric vehicle by differentialsliding mode observer. pages 541–546. 1st Mediterranean Conferenceon Intelligent Systems and Automation, 2008.
[2] M. Bouteldja. Modelisation des Interactions Dynamiques Poids
Lourd/Infrastructures pour la Securite et les Alertes. PhD thesis,Universite de Versailles Saint-Quentin, 2005.
[3] J. Davila, L. Fridman, and A. Poznyak. Observation and identificationof mechanical systems via second order sliding modes. International
Journal of Control, 79(10):1251–1262, 2006.[4] L. Davis and J. Bunker. Suspension testing of 3 heavy vehicles -
methodology and preliminary frequency analysis. Technical report,Queensland university of technology and Queensland department ofmainroads, july 2008.
[5] Y. Delanne, V. Schmitt, and V. Dolcemascolo. Heavy truck rolloversimulation. 18th International Conference on the Enhanced Safety ofVehicles, Nagoya, Japan, may 2003.
[6] H. Imine and V. Dolcemascolo. Sliding mode observers to heavy vehiclevertical forces estimation. International Journal of Heavy Vehicle
Systems, 15(1):53–64, 2008.[7] L. R. Ray. Non linear state and tire force estimation for advanced
vehicle control. IEEE Transaction on control systems technology, 3(1),1995.
[8] H. Saadaoui, N. Manamanni, M. Djemaı, J.P. Barbot, and T. Flo-quet. Exact differentiation and sliding mode observers for switchedlagrangian systems. Nonlinear analysis, (65)2006.
[9] P. M. Siegrist. A methodology for monitoring tyre-forces on off-highway
mining trucks. PhD thesis, University of Queensland, 2003.
1725