Unknown Input and State Estimation for Unobservable Systems
24
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited. SIAM J. CONTROL OPTIM. c 2009 Society for Industrial and Applied Mathematics Vol. 48, No. 2, pp. 1155–1178 UNKNOWN INPUT AND STATE ESTIMATION FOR UNOBSERVABLE SYSTEMS ∗ FRANCISCO J. BEJARANO † , LEONID FRIDMAN † , AND ALEXANDER POZNYAK ‡ Abstract. The concept of strong detectability and its relation with the concept of invariant zeros is reviewed. For strongly detectable systems (which includes the strongly observable systems), it is proposed a hierarchical design of a robust observer whose trajectories converge to those of the original state vector. Furthermore, it is shown that neither left invertibility is a sufficient condition nor strong detectability is a necessary condition to estimate the unknown inputs. It is shown that the necessary and sufficient condition for estimating the unknown inputs is that the set of the invariant zeros that do not belong to the set of unobservable modes be within the interior of the left half plane of the complex space. This shows that the unknown inputs could be estimated even if it is impossible to estimate the entire state vector of the system. Two numerical examples illustrate the effectiveness of the proposed estimation schemes. Key words. unknown input estimation, strong detectability, sliding mode observer AMS subject classifications. 93C41, 93B07, 93B51 DOI. 10.1137/070700322 1. Introduction. 1.1. Antecedents. The problem of state observation for systems with unknown inputs has been extensively studied in the last two decades. Usually, the design of observers requires the system to have relative degree one with respect to the unknown inputs (see, e.g., [16] and [10]). Within variable structure theory, the problems of state observation and unknown input estimation have been actively developed using the sliding mode approach (see, for example, the corresponding chapters in the textbooks [11], [27] and the recent tutorials [3], [10], [22]). But generally they were developed for systems which satisfy the necessary and sufficient conditions to estimate the entire state vector without differentiation of the output (i.e., for the systems with relative degree one w.r.t. the unknown inputs) [16]. It turns out that the previously mentioned conditions are not satisfied for the state observation of a mechanical system with sensors measuring only the position of the elements of the system [9]. To overcome the restriction of relative degree one w.r.t. the unknown inputs, an idea was suggested: to transform the system into a triangular form and use a step-by-step sliding mode observer based on the successive reconstruction of each element of the transformed state vector (see, e.g., [15], [27], [1], and [14]). However, the design of those observers is restricted to the fulfilment of a specific relative degree condition ([12]). The essence of the observers that use the triangular form is to recover information from the derivatives of the output of the system which are not affected by the unknown inputs. Such derivatives can be estimated via a second-order sliding ∗ Received by the editors August 16, 2007; accepted for publication (in revised form) December 3, 2008; published electronically March 18, 2009. Results of this manuscript were presented in the European Control Conference 2007, Kos, Greece. http://www.siam.org/journals/sicon/48-2/70032.html † Department of Control, Division of Electrical Engineering, National Autonomous University of Mexico (UNAM), C.P. 04510, M´ exico, D.F. ([email protected], [email protected]. mx). ‡ Departamento de Control Autom´atico, CINVESTAV-IPN, A.P. 14-740, C.P. 07000 M´ exico D.F. ([email protected]). 1155
Transcript of Unknown Input and State Estimation for Unobservable Systems

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
SIAM J. CONTROL OPTIM. c© 2009 Society for Industrial and Applied MathematicsVol. 48, No. 2, pp. 1155–1178
UNKNOWN INPUT AND STATE ESTIMATION FORUNOBSERVABLE SYSTEMS∗
FRANCISCO J. BEJARANO†, LEONID FRIDMAN† , AND ALEXANDER POZNYAK‡
Abstract. The concept of strong detectability and its relation with the concept of invariantzeros is reviewed. For strongly detectable systems (which includes the strongly observable systems),it is proposed a hierarchical design of a robust observer whose trajectories converge to those of theoriginal state vector. Furthermore, it is shown that neither left invertibility is a sufficient conditionnor strong detectability is a necessary condition to estimate the unknown inputs. It is shown that thenecessary and sufficient condition for estimating the unknown inputs is that the set of the invariantzeros that do not belong to the set of unobservable modes be within the interior of the left half planeof the complex space. This shows that the unknown inputs could be estimated even if it is impossibleto estimate the entire state vector of the system. Two numerical examples illustrate the effectivenessof the proposed estimation schemes.
Key words. unknown input estimation, strong detectability, sliding mode observer
AMS subject classifications. 93C41, 93B07, 93B51
DOI. 10.1137/070700322
1. Introduction.
1.1. Antecedents. The problem of state observation for systems with unknowninputs has been extensively studied in the last two decades. Usually, the design ofobservers requires the system to have relative degree one with respect to the unknowninputs (see, e.g., [16] and [10]). Within variable structure theory, the problems of stateobservation and unknown input estimation have been actively developed using thesliding mode approach (see, for example, the corresponding chapters in the textbooks[11], [27] and the recent tutorials [3], [10], [22]). But generally they were developedfor systems which satisfy the necessary and sufficient conditions to estimate the entirestate vector without differentiation of the output (i.e., for the systems with relativedegree one w.r.t. the unknown inputs) [16]. It turns out that the previously mentionedconditions are not satisfied for the state observation of a mechanical system withsensors measuring only the position of the elements of the system [9].
To overcome the restriction of relative degree one w.r.t. the unknown inputs,an idea was suggested: to transform the system into a triangular form and use astep-by-step sliding mode observer based on the successive reconstruction of eachelement of the transformed state vector (see, e.g., [15], [27], [1], and [14]). However,the design of those observers is restricted to the fulfilment of a specific relative degreecondition ([12]). The essence of the observers that use the triangular form is to recoverinformation from the derivatives of the output of the system which are not affectedby the unknown inputs. Such derivatives can be estimated via a second-order sliding
∗Received by the editors August 16, 2007; accepted for publication (in revised form) December3, 2008; published electronically March 18, 2009. Results of this manuscript were presented in theEuropean Control Conference 2007, Kos, Greece.
http://www.siam.org/journals/sicon/48-2/70032.html†Department of Control, Division of Electrical Engineering, National Autonomous University of
Mexico (UNAM), C.P. 04510, Mexico, D.F. ([email protected], [email protected]).
‡Departamento de Control Automatico, CINVESTAV-IPN, A.P. 14-740, C.P. 07000 Mexico D.F.([email protected]).
1155

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1156 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
mode technique, specifically by the super-twisting algorithm. In the last two decadessome second-order sliding-mode algorithms have been designed (see, e.g., [2], [4], [24],[5], and [21]). The super-twisting technique is a second-order sliding mode that keepsthe advantages of classic sliding mode, and further the super-twisting algorithm canbe used as a robust exact differentiator [18, 19]. It is used here for the state andunknown estimation.
1.2. Motivation. It was shown in [7, 8] that strong observability condition (ab-sence of invariant zeros) is necessary and sufficient for the reconstruction in finitetime of the state vector. Regarding the observation problem, in this paper we suggesta scheme of design which relaxes the strong observability condition, even when theconvergence of the observation error to the zero point becomes asymptotic.
On the other hand, usually the estimation of the unknown inputs requires firstto estimate the entire state vector (see, e.g., [25], [23], [13]); however, estimating theentire state vector, as we shall see below, requires the system to be at least stronglydetectable (equivalently, that the set of the invariant zeros belongs to the interior ofthe left half plane of the complex space). Here, we show that in the general case, forthe unknown input estimation, the strong detectability condition can be relaxed.
1.3. Main contributions. Regarding the unknown input reconstruction, themain contributions of this paper are:
• Necessary and sufficient structural conditions for the unknown input estima-tion have been found. Namely, the estimation of the unknown inputs canbe carried out if the set of the invariant zeros of the system (for the knowncontrol input equal to zero) that do not belong to the set of unobservableeigenvalues is within the interior of the left half plane of the complex space.
• The structural conditions under which the unknown inputs can be recon-structed exactly in a finite time are given.
• A scheme for the estimation (reconstruction) of the unknown inputs is sug-gested, which is based on the decomposition of the system into three subsys-tems. This allows one to estimate the states of the first two subsystem, whichis enough for the unknown input estimation (reconstruction).
• Combining the structural conditions obtained in this paper and the conditionsgiven in [16] for state estimation, it is shown that, under more restrictiveconditions, the unknown inputs could be estimated without estimating theentire state vector and without using any derivative of the system output.
If the system is not strongly observable, it is impossible to design a standarddifferential observer providing state estimation. Because of that, we proposed anotherapproach related to the designing of an algebraic-type observer which can successfullywork for both strongly observable and nonstrongly observable, but strongly detectablesystems. Therefore, concerning the state estimate, the main contributions are:
• Decomposition of the system into two subsystems. The first one is stronglyobservable for the null known control input and the second one is expectedto be detectable.
• Design of an observer for the state vector of the first subsystem by applyingthe second-order hierarchical observation scheme [7].
1.4. Structure of the paper. The manuscript is structured in the followingmanner. In section 2 we outline the problem statement. Section 3 is devoted to somepreliminaries dealing mainly with the concepts of strong observability and strongdetectability. In the same section, we present the main idea for estimating the state

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1157
vector. Necessary and sufficient conditions under which the unknown inputs can beestimated are given in section 4. Section 5 deals with the design of the observer ofthe state vector. In section 6, an algorithm for the estimation of the unknown inputsis suggested. Some simulations are depicted in section 7, which illustrate the schemeof design proposed in the paper. The proofs of propositions, lemmas, and theoremsare given in the appendix.
1.5. Notation. We use the following notation. Let G ∈ Rn×m be a matrix.We define G+ as the pseudoinverse of G. Thus, if rankG = n, GG+ = I, and ifrankG = m, G+G = I. For J ∈ Rn×m with rankJ = r, we define J⊥ ∈ Rn−r×n withrankJ⊥ = n− r as a matrix achieving J⊥J = 0; and J⊥⊥ ∈ Rr×n with rankJ⊥⊥ = r
as a matrix such that J⊥(J⊥⊥)T = 0. Notice that det[
J⊥
J⊥⊥
]�= 0, and also that
J⊥⊥J ∈ Rr×m and rank(J⊥⊥J) = r. C
− := {s ∈ C : Re s < 0}.2. Problem formulation. Let us consider the following system affected by un-
known inputs:1
(2.1)x (t) = Ax (t) + Bu (t) + Dw (t) , x (0) = x0
y (t) = Cx (t) + Fw (t) , t ≥ 0
The vector x (t) ∈ Rn is the state vector, u (t) ∈ Rm is the control, y (t) ∈ Rp isthe output of the system, w (t) ∈ R
q represents the unknown input vector, which isbounded, i.e., ‖w (t)‖ ≤ w+ < ∞. The matrices A ∈ Rn×n, B ∈ Rn×m, C ∈ Rp×n,D ∈ Rn×q, and F ∈ Rp×q are known constants. The pair {u (t) , y (t)} is assumed tobe measurable (available) at any time t ≥ 0. The current states x (t) as well as theinitial state x0 are not available. Without the loss of generality we assume that
rank[
DF
]= q.
Problems statement :In this paper we would like to discuss the following problems for the system (2.1):(a) the estimation of x (t) based on the available information {u (τ ) , y (τ)}τ∈[0,t],(b) the estimation of w (t) based on the available information {u (τ ) , y (τ )}τ∈[0,t] .
3. Preliminaries. Defining xc = Axc (t) + Bu we have that the dynamic equa-tion for xe := x − xc is given by xe (t) = Axe (t) + Dw (t) with the output ye :=y −Cxc = Cxe (t) + Fw (t). Thus, the estimation of x is equivalent to the estimationof xe since x = xe + xc. It means that for the observation problem the control udoes not play any role. Therefore, without the loss of generality it will be assumedthroughout this section and the next one that u ≡ 0.
Let Σ := (A, C, D, F ) be the fourfold of matrices associated to the dynamic systemthat is governed by the equations
(3.1)x (t) = Ax (t) + Dw (t) , x (0) = x0
y (t) = Cx (t) + Fw (t) , t ≥ 0
3.1. Strong observability. We recall some definitions corresponding to prop-erties of Σ and its associated dynamic system (3.1) (see, e.g., [16], [26]).
1It can be done an extension to the case of nonlinear systems considered in [14].

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1158 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
Definition 3.1. The system (3.1) is called strongly observable if, for all initialcondition x0 and for all unknown input w (t), the identity y (t) = 0 for all t ≥ 0 impliesthat x (t) = 0 for all t ≥ 0.
Definition 3.2. VΣ is a null-output (A, D) invariant subspace if for everyx0 ∈ V there exists a w such that (Ax0 + Dw) ∈ VΣ and (Cx0 + Fw) = 0. V∗
Σ is themaximal null-output (A, D) invariant subspace; i.e., for every VΣ we have VΣ ⊂ V∗
Σ.The subspace V∗
Σ is called the weakly unobservable subspace of Σ.Definition 3.3. s0 ∈ C is an invariant zero of Σ if
(3.2) rank P (s0) < n + rank[
DF
]; P (s0) :=
[s0I − A −D
C F
].
Fact 1. The following statements are equivalent (see, e.g., [16], [26]):(i) The dynamic system (3.1), associated to Σ, is strongly observable;(ii) V∗
Σ = 0;(iii) Σ has no invariant zeros.
3.2. Decomposition into the strongly and nonstrongly observable sub-systems. Now, we will decompose the system into the strongly observable part andthe nonstrongly observable part. With this aim, we will need a basis of V∗
Σ. Next,we give a form to construct a basis for the subspace V∗
Σ. Let the matrices Mk,Σ bedefined recursively by
(3.3)Mk+1,Σ = M⊥⊥
k+1,ΣMk+1,Σ , M1,Σ =(F⊥C
)⊥⊥F⊥C
Mk+1,Σ = Tk,Σ
(Mk,ΣA
C
), Tk,Σ =
(Mk,ΣD
F
)⊥.
Thus, Mk+1,Σ has full row rank.2 In [20] it was proven that
(3.4) V∗Σ = kerMn,Σ.
Defining3 n1 := rankMn,Σ, we have that Mn,Σ ∈ Rn1×n. Now, with V ∈ Rn×n−n1
being a matrix whose columns form a basis of V∗Σ, define the following nonsingular
matrix
(3.5) P :=[Mn,Σ
V +
],
where V + ∈ Rn−n1×n. Hence,4 P−1 =[M+
n,Σ V], M+
n,Σ ∈ Rn×n1 . On the otherhand, Definition 3.2 is equivalent to the fulfilment of the following pair of algebraicequations
(3.6) AV + DK∗ = V Q, CV + FK∗ = 0
2According to the notation given in 1.5, the matrix M⊥⊥k+1,Σ has full row rank and
rank(Mk+1,Σ) = rank(M⊥⊥k+1,Σ) = rank(Mk+1,Σ). At difference with the definition of Mk+1 given
in [7], here Mk+1,Σ always has full row rank.3It is easy to verify that rank Mj+1 = rank Mj implies rank Mj+2 = rank Mj . Therefore, to
reduce the number of computations of the matrices Mk, if rank Mj+1 = rank Mj , we can defineMn = Mn−1 = · · · = Mj .
4Notice that M+n,Σ = MT
n,Σ(Mn,ΣMTn,Σ)−1 and V + = (V T V )−1V T . Therefore, Mn,ΣM+
n,Σ = I,
V +V = I, Mn,ΣV = 0, V +M+n,Σ = 0.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1159
for some matrices {K∗, Q}. It is clear that there exists a matrix K∗ ∈ Rm×n suchthat
(3.7){
AV + DK∗ = V QCV + FK∗ = 0
}equivalent⇐⇒
{(A + DK∗)V = V Q(C + FK∗)V = 0
}.
Taking into account that V +V = I, it is easy to see that K∗ = K∗V + satisfies (3.7).It also should be noticed that in general K∗ is not unique. Let x be defined by x = Pxwith the partition xT =
[xT
1 xT2
], where x1 ∈ Rn1 and x2 ∈ Rn−n1 . Thus, because
of the manner in which P was defined, and from (3.7) and (3.4), the dynamics of x isgoverned by the equations
(3.8)
[˙x1 (t)˙x2 (t)
]=
[A1 0A2 A4
] [x1 (t)x2 (t)
]+
[D1
D2
]w (t)
y (t) = C1x1 (t) + Fw (t)w (t) = w (t) − K∗P−1x = w (t) − K∗x2 (t) ,
where
(3.9)[A1 0A2 A4
]:= P
(A + DK∗)P−1,
[D1
D2
]:= PD, C1 :=
(C + FK∗)M+
n,Σ.
Now, define
ΣK∗,P :=(P
(A + DK∗)P−1,
(C + FK∗)P−1, PD, F
).
From (3.4) and (3.7), it follows that
(3.10) kerMn,ΣK∗,P= V∗
ΣK∗,P= PV∗
Σ = P kerMn,Σ.
Lemma 3.4. Defining Σ := (A1, C1, D1, F ), we have that the dynamic systemassociated to Σ is strongly observable; i.e., kerMn1,Σ = 0 and Σ has no invariantzeros.
3.3. Strong detectability. The next definition can be found in [16] and [26].Definition 3.5. The system (3.1) is called strongly detectable if, for all initial
condition x0 and for all unknown inputs w (t) providing the existence of solution in(3.1), the identity y (t) = 0 for all t ≥ 0 implies x (t) → 0 as t → ∞.
Remark 1. It is clear that the strong detectability property is a necessary require-ment for the asymptotic estimation of the state vector. As we will see later, strongdetectability is also a sufficient condition for such a purpose.
Remark 2. Evidently, the strong detectability condition is less restrictive thanthe strong observability condition. The following system is an example of a systemthat is not strongly observable, but it is strongly detectable.
x1 (t) = x1 (t) + w (t)x2 (t) = x1 (t) − x2 (t)y (t) = x1 (t)
The following theorem relates the strong detectability with the invariant zeros.Theorem 3.6 (see [16]). The system (3.1) is strongly detectable if, and only if,
the set of the invariant zeros of Σ belongs to C−.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1160 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
Now, using the notation (3.9), we are ready to give a characterization of theinvariant zeros of Σ.
Lemma 3.7. The invariant zeros of Σ := (A, C, D, F ) are characterized by thefollowing properties:
(a) If rank[D1F
]= q, the set of the invariant zeros of Σ and the set of eigenvalues
of the matrix A4 are identical.(b) If rank
[D1F
]< q, every s ∈ C is an invariant zero, where q is the number of
unknown inputs, that is, w (t) ∈ Rq.The following proposition can be found as an exercise on p. 170 of [26].Proposition 3.8. The system Σ = (A, C, D, F ) is strongly detectable if, and
only if, the pair (A + DK, C + FK) is detectable for any K ∈ Rq×n.
3.4. Basic idea for the state estimation. In this part of the paper, we willgive the basic procedure for the reconstruction of the state in the new coordinates.
3.4.1. Recursive method for the reconstruction of x1. The next is a re-cursive method for expressing x1 as a function of y and its derivatives. It consists inthe successive construction of the vectors Mk,Σx1 (t), which leads to the constructionof the vector Mn1,Σx1 (t).
Construction of the vector Mn1,Σx1 (t)(Σ := A1, C1, D1, F
):
1. Defining ξ1 (y) := (F⊥C1)⊥⊥F⊥y, the following equality is obtained
ξ1 (y) =(F⊥C1
)⊥⊥F⊥C1x1 = M1,Σx1;
2. defining ξ2(y, y) := M⊥⊥2,Σ
T1,Σ
[ddt F⊥C1x1
y
], it is obtained
ξ2 (y, y) = M⊥⊥2,Σ T1,Σ
[F⊥C1A1
C1
]x1 = M2,Σx1;
k + 1. defining ξk+1(y, y, . . . , y(k)) := M⊥⊥k+1,Σ
Tk,Σ
[ddt Mk,Σx1
y
], it is obtained
ξk+1
(y, y, . . . , y(k)
)= M⊥⊥
k+1,ΣTk,Σ
[Mk,ΣA1
C1
]x1 = Mk+1,Σx1;
n1. finally, defining ξn1(y, y, . . . , y(n1−1)) := M⊥⊥
n1,ΣTn1−1,Σ
[ddt Mn1−1,Σx1
y
], one gets
ξn1
(y, y, . . . , y(n1−1)
)= M⊥⊥
n1,ΣTn1−1,Σ
[Mn1−1,ΣA1
C1
]x1 = Mn1,Σx1.
From Lemma 3.4, the equivalence between (ii) and (iii) in Fact 1, and (3.4), wehave that detMn1,Σ �= 0. Thus, after premultiplying by M−1
n1,Σin the n1th stage, the
vector x1 (t) can be expressed by means of the following formula:
(3.11) x1 (t) = M−1n1,Σ
ξn1
(y, y, . . . , y(n1−1)
)Equation (3.11) means that x1 always can be reconstructed by means of linear
combinations of the terms of the vector y and their derivatives.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1161
3.4.2. Procedure for the estimation of x2. As we have seen below, thestrong detectability property is a necessary condition for the asymptotic estimation ofthe entire state vector. Therefore, it is assumed that the dynamic system associatedto Σ is strongly detectable. It implies, from Theorem 3.6 and Lemma 3.7.b, thatrank
[DT
1 FT]T = q. Hence, from (3.8), w can be rewritten as w =
[D1F
]+[˙x1 − A1x1y − C1x1
],
and its substitution into ˙x2 gives
˙x2 = A4x2 + A2x1 + D2
[D1
F
]+ [˙x1 − A1x1
y − C1x1
].
Now, let z2 be the state observer for x2 defined by
z2 = z2 + D2
[D1
F
]+ [x1
0
]
˙z2 = A4z2 + A2x1 − D2
[D1
F
]+ [A1x1
C1x1 − y
],
where x1 is supposed to be reconstructed from (3.11) using the recursive method givenin 3.4.1. Thus, the error x2 − z2 is governed by the equation ˙x2 − ˙z2 = A4 (x2 − z2).By the assumption that (3.1) is strongly detectable, from Theorem 3.6 and Lemma3.7, we have
z2 (t) →t→∞ x2 (t) .
The previous scheme together with the definition of strong detectability gives rise tothe following result.
Remark 3. Using the output of the system and a linear combinations of itsderivatives, the strong detectability turns out to be a necessary and sufficient conditionfor the asymptotic estimation of x.
4. Necessary and sufficient conditions for the estimation of w (t). Inthis section, we will show that for the estimation of w the system may be nonstronglydetectable, even further the pair (A, C) may be nondetectable. We will show that thenecessary and sufficient condition to estimate w has to do with the set of invariantzeros of Σ = (A, C, D, F ) and the set of eigenvalues related to the unobservability ofthe pair (A, C). For that purpose we decompose the dynamics of the vector x2 in(3.8), where the second part of this decomposition corresponds to the unobservablepart of (A, C). Since the proof of sufficiency of theorem establishing the conditionsunder which the estimation of w can be carried out is constructive, we give at thesame time the main procedure for the estimation of w.
Let xw,x0 be the solution of the differential equation x (t) = Ax (t)+Dw, x (0) :=x0. Let yw,x0 (t) = Cxw,x0 + Fw. Thus, xw,x0 = Pxw,x0 is governed by the setof equations (3.8). Now, let us recall the definition of left invertibility. The leftinvertibility concept in the time domain framework can be found in [6] for the case F =0, and in [26] for the general class of inputs that are impulsive-smooth distributions.The definition given below is quite similar to the second one.
Definition 4.1. The system Σ is called left invertible if for any w1 (t), w2 (t) ∈Rq the following statement holds: yw1,x0 (t) = yw2,x0 (t) for all t ≥ 0 implies w1 (t) =w2 (t) for all t ≥ 0.
It is clear that left invertibility is a necessary condition for the estimation of w (t).However, we will see afterwards that it is not a sufficient one. That is quite obvious

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1162 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
because the fulfilment of the left invertibility property depends on the knowledge ofx0, which is not the case considered here.
Lemma 4.2. Σ is left invertible if, and only if, rank[D1F
]= q.
The next corollary follows directly from Lemmas 3.7 and 4.2.Corollary 4.3. Σ is left invertible if, and only if, the set of invariant zeros of
Σ is finite.Let N ∗ be the unobservable subspace corresponding to the pair (A, C), that is,
the greatest subspace satisfying
(4.1) AN ∗ ⊂ N ∗ and CN ∗ = 0.
It is clear by the definition of V∗Σ that N ∗ ⊂ V∗
Σ. Let O be the observability matrixof the pair (A, C); it is well known that N ∗ = kerO.
Let N be a full column rank matrix whose columns form a basis of N ∗. Thus, wecan chose a full column rank matrix V forming a basis of V∗ adapted to N ∗, that is,V must have the following form
(4.2) V =[
V N].
Defining n2 := dimN ∗, we have that V ∈ Rn×n−(n1+n2), N ∈ Rn×n2 .Proposition 4.4. If rank
[D1F
]= q and V has the form (4.2), the matrices K∗
and Q satisfying (3.6) take the form
(4.3) K∗ =[
K∗1 0
], Q =
[Q1 0Q2 Q4
]
for some matrices K∗1 ∈ Rq×(n−n1−n2), Q1 ∈ R(n−n1−n2)×(n−n1−n2),
Q2 ∈ Rn2×(n−n1−n2), and Q4 ∈ Rn2×n2 .Thus, under the assumption that rank
[D1F
]= q, and taking into account (3.7),
(4.2), and (4.3), we have that the matrix A4 in (3.8) takes the following partitionedform
(4.4) A4 := V +(A + DK∗)V =
[Q1 0Q2 Q4
]=:
[A41 0A42 A44
],
where A41 := Q1, A42 := Q2, and A44 := Q4. Therefore, partitioning the vectorx2 =:
[x21(t)x22(t)
]and from (4.3) and (4.4), the system (3.8) can be rewritten as
(4.5)
⎡⎣ ˙x1 (t)
˙x21 (t)˙x22 (t)
⎤⎦ =
⎡⎣A1 0 0A21 A41 0A22 A42 A44
⎤⎦⎡⎣ x1 (t)
x21 (t)x22 (t)
⎤⎦ +
⎡⎣D1
D21
D22
⎤⎦ w (t)
y (t) = C1x1 (t) + Fw (t)w (t) = w (t) − K∗
1 x21 (t) ,
where x21 ∈ Rn−(n1+n2) and x22 ∈ Rn2 . The matrices A2 and D2 given in (3.8) werepartitioned as follows: [
A21
A22
]:= A2,
[D21
D22
]:= D2.
First, we will show some facts that will be important in the procedure for findingthe conditions under which we can estimate w.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1163
Definition 4.5 (see [26]). The constant λ ∈ C is said to be an (A, C)-unobservableeigenvalue if rank
[λI−A
C
]< n.
Lemma 4.6. If rank[D1F
]= q, then:
(a) the set of (A, C)-unobservable eigenvalues is identical to the set of eigenvaluesof A44, and
(b) the set of invariant zeros of Σ that do not belong to the set of (A, C)-unobservableeigenvalues is identical to the set of eigenvalues of A41.
Theorem 4.7. The following claims are equivalent.(i) For any initial condition x (0),
(4.6) y (t) = 0 for all t ≥ 0 implies w (t) = 0 for all t ≥ 0.
(ii) The set of invariant zeros of Σ is identical to the set of (A, C)-unobservableeigenvalues.
(iii) Σ is left invertible and V∗ ≡ N ∗.(iv) 5 rank
[D1F
]= q and rankMn,Σ = rankO.
Theorem 4.8. The following sentences are equivalent.(i) For any initial condition x (0),
(4.7) y (t) = 0 for all t ≥ 0 implies w (t) →t→∞ 0.
(ii) The set of invariant zeros of Σ that do not belong to the set of (A, C)-unobservable eigenvalues is in C−.
(iii) rank[D1F
]= q and the set of eigenvalues of A41 is in C−.
The following theorems establish the conditions, in terms of the invariant ze-ros of Σ := (A, C, D, F ) and the (A, C)-unobservable eigenvalues, under which theestimation of w (t) can be carried out.
Theorem 4.9. Based on the measurement of y (t), the vector w can be estimatedif, and only if, the set of invariant zeros of Σ that do not belong to the set of (A, C)-unobservable eigenvalues is in C
−.Theorem 4.10. Based on the measurement of y (t), the vector w can be recon-
structed in finite time if, and only if, the set of invariant zeros of Σ is identical to theset of (A, C)-unobservable eigenvalues.
We should notice that if, in addition to the condition of Theorem 4.9, the system Σsatisfies the condition rank
[CD FF 0
]= rankF +q, then one can avoid using derivatives
for the estimation of w. Because of, in such a case, x1 can be estimated asymptoticallyby using a linear observer (see, e.g., [16]). This can be summarized in the followingtheorem.
Theorem 4.11. The vector w can be estimated from the system output y, withoutusing any derivatives, if, and only if, the following two conditions are fulfilled:
(1) the set of invariant zeros of Σ that do not belong to the set of (A, C)-unobservableeigenvalues is in C−, and
(2) rank[CD FF 0
]= rank (F ) + q.
5. Design of a robust observer. The following restriction will be assumed tobe satisfied throughout this section.A1 The dynamic system associated to Σ = (A, C, D, F ) is strongly detectable.
Now, we will apply the scheme of design proposed in section 3 to the system (2.1)for the state vector estimate.
5Mn is given by (3.3) and O is the observability matrix of (A, C).

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1164 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
Thus, with P selected according to (3.5), after defining x := Px, and with thepartition x =:
[x1x2
], we have
(5.1)
[˙x1 (t)˙x2 (t)
]=
[A1 0A2 A4
] [x1 (t)x2 (t)
]+
[B1
B2
]u +
[D1
D2
]w (t)
y (t) = C1x1 (t) + Fw (t)w (t) = w (t) − K∗x2 (t) ,
where the system and distribution matrices are defined according to (3.9), and B1 =Mn,ΣB and B2 = V +B.
5.1. Bounding term. In the recursive method given in 3.4.1, some derivativeson time are needed; here, we suggest to use the super-twisting algorithm for theobtaining of the required derivatives. However, the super-twisting algorithm requiressome bound of the state vector that is to be reconstructed; therefore, for ensuring thebound required we will use the following Luenberger observer.
(5.2) z = PAP−1z + PBu + L(y − CP−1z
)The matrix PAP−1 − LCP−1 must be Hurwitz. Such a requirement can always besatisfied, and A1 and the Proposition 3.8 guarantee its fulfilling. Defining e = x − z,we get the inequality ‖e‖ ≤ γ exp (−λt) ‖e (0)‖ + μw+ for some positive constantsγ, λ, and μ. Now, let us make a partition of e into two vectors, i.e., e1 = x1 − z1
and e2 = x2 − z2, where zT =:[zT1 zT
2
]and z1 ∈ R
n1 , z2 ∈ Rn−n1 . Let ζ be a
constant satisfying ζ > μw+, then, after a finite time T , e1 and e2 stay bounded, i.e.,‖e1 (t)‖ < ζ and ‖e2 (t)‖ < ζ, for all t ≥ T .
5.2. Reconstruction of Mn1,Σe1 (t). Now, the state estimation procedure of3.4.1 will be applied to e1. Thus, once e1 is reconstructed, x1 can be recovered by theformula x1 = e1 + z1. Firstly, recall that Σ := (A1, C1, D1, F ). Now, let us design theauxiliary vector σ defined by the equation
(5.3) σ (t) = A1z1 (t) + B1u.
Define the first sliding variable s1 as follows:
s1 (t) = M⊥⊥2,Σ T1,Σ
[(F⊥C1
)⊥⊥F⊥ (y (t) − C1σ (t))∫ t
0(y (τ ) − C1z (τ )) dτ
]−
∫ t
0
v1 (τ) dτ.
Thus, taking the derivative of s on time, and because of (3.3), we have
(5.4) s1 (t) = M2,Σe1 (t) − v1 (t) .
We design the output injection vector v1 using the super-twisting technique ([17],[18]), involving not only a sign function but also its integral, that is,
(5.5)v1
i = v1i + λ1
∣∣s1i
∣∣1/2 sign s1i
˙v1i = α1 sign s1
i ,
where v1i is the ith term of the vector v1, and the same applies for v1
i and s1i . The
constants α1 and λ1 are selected to satisfy the inequalities:
κ1 ≥ ∥∥M2,Σ
∥∥ (∥∥PAP−1 − LCP−1∥∥ ζ + ‖PD − LF‖w+
)α1 > κ1, λ1 >
(1 + θ) (κ1 + α1)1 − θ
√2
κ1 − α1, 1 > θ > 0,

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1165
where ζ was defined in subsection 5.1. Thus, according to [18], we have a second-ordersliding mode, that is, s1 (t) = s1 (t) = 0 for all t ≥ t1 where t1 is the reaching time tothe sliding mode. Therefore, from (5.4) and (5.5), we have that
(5.6) v1 (t) = M2,Σe1 (t) , for all t ≥ t1.
We can follow a quite similar scheme for the reconstruction of M3,Σe1 (t). Namely,design the variable s2 (t) as
s2 (t) = M⊥⊥3,Σ T2,Σ
[v1 (t) − M2,Σ (σ (t) − z1 (t))∫ t
0 (y (τ ) − C1z (τ )) dτ
]−
∫ t
0
v2 (τ ) dτ .
Hence, taking into account (3.3) and (5.6), for t ≥ t1, the derivative of s2 (t) is
(5.7) s2 (t) = M3,Σe1 (t) − v2 (t) .
Again, the output injection vector v2 is designed using the super-twisting algorithm,
(5.8)v2
i = v2i + λ2
∣∣s2i
∣∣1/2 sign s2i
˙v2i = α2 sign s2
i .
The positive constants α2 and λ2 should satisfy the following upper bounds:
κ2 ≥ ∥∥M3,Σ
∥∥ (∥∥PAP−1 − LCP−1∥∥ ζ + ‖PD − LF‖w+
)α2 > κ2, λ2 > (1+θ)(κ2+α2)
1−θ
√2
κ2−α2, 1 > θ > 0.
Then, according to [18], we have that s2 (t) = s2 (t) = 0 for all t after t2, which isthe reaching time to the second sliding mode. Hence, in view of (5.7) and (5.8), weachieve the equality v2 (t) = M3,Σe1 (t) for all t ≥ t2.
We can generalize the previous procedure for the reconstruction of Mk,Σe1 (t) (k =2, . . . , n1 − 1). Since, in this procedure, the main goal is the reconstruction of e1 (t),in the last step we will reconstruct directly e1 (t) instead of recovering Mn1,Σe1 (t).The procedure is detailed below.
(a) Sliding variable s1:
(5.9) s1 (t) = M⊥⊥2,Σ T1,Σ
[(F⊥C1
)⊥⊥F⊥ (y (t) − C1σ (t))∫ t
0 (y (τ ) − C1z1 (τ )) dτ
]−
∫ t
0
v1 (τ ) dτ ;
sliding variable sk, k = 2, . . . , n1 − 2:
(5.10) sk (t) = M⊥⊥k+1,ΣTk,Σ
[vk−1 (t) − Mk,Σ (σ (t) − z1 (t))∫ t
0(y (τ ) − C1z1 (τ )) dτ
]−
∫ t
0
vk (τ ) dτ ;
sliding variable sn1−1:
(5.11)sn1−1 (t) =
[Mn1,Σ
]−1M⊥⊥
n1,ΣTn1−1,Σ
[vn1−2 (t) − Mn1−1,Σ (σ (t) − z1 (t))∫ t
0(y (τ ) − C1z1 (τ )) dτ
]−∫ t
0
vn1−1 (τ ) dτ ,
where σ (t) is defined from (5.3).

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1166 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
(b) Output injection vector vk (k = 1, . . . , n1 − 1),
(5.12)vk
i = vki + λk
∣∣ski
∣∣1/2 sign ski
˙vki = αk sign sk
i
being vki the ith term of the vector vk and vk
i the ith term of the vector vk. Theconstants αk and λk are designed according with [17] and [18]:
κk ≥ ∥∥Mk+1,Σ
∥∥ (∥∥PAP−1 − LCP−1∥∥ ζ + ‖PD − LF‖w+
), k = 1, . . . , n1 − 2
κk ≥ ∥∥PAP−1 − LCP−1∥∥ ζ + ‖PD − LF‖w+, k = n1 − 1
αk > κk, λk >(1 + θ) (κk + αk)
1 − θ
√2
κk − αk, 1 > θ > 0, k = 1, . . . , n1 − 1,
where ζ was defined in 5.1 and w+ is the bound of w. The procedure for the recon-struction of e1 (t) is given in the following theorem.
Theorem 5.1 ([7]). Following the design of sk and vk as in (5.9)–(5.12), weobtain the equalities
vk (t) = Mk+1,Σe1 (t) for all t ≥ tk, k = 1, . . . , n1 − 2(5.13)
vn1−1 (t) = e1 (t) for all t ≥ tn1−1,(5.14)
where tk is the reaching time to the kth sliding mode.
5.3. Observation of x1. Now, based on the recursive method given in 3.4.1, wehave found the difference between the state vector and the Luenberger observer. Itmeans that, following the method of design given previously in this section, we havethat
(5.15) x1 (t) = z1 (t) + vn1−1 (t) for all t ≥ tn1−1.
The equality (5.15) motivates us to propose the reconstruction of the state x1 (t) bymeans of
(5.16) z1 (t) := z1 (t) + vn1−1 (t) .
Theorem 5.2. Designing z1 (t) according to (5.16), we achieve the identity
(5.17) z1 (t) = x1 (t) for all t ≥ tn1−1.
Proof. It follows immediately by comparing (5.15) and (5.16).
5.4. Observation of x2. Now, let us design an observer for the vector x2 givenby (5.1). This is made by means of z2 which is designed as
z2 = z2 + D2
[D1
F
]+ [z1
0
],(5.18a)
˙z2 = A4z2 + A2z1 + B2u − D2
[D1
F
]+ [A1z1 + B1uC1z1 − y
].(5.18b)
Thus, taking into account (5.17) we can obtain the dynamic equation for the errorbetween x2 − z2, i.e.,
˙x2 (t) − ˙z2 (t) = A4 (x2 (t) − z2 (t)) for all t ≥ tn1−1.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1167
Due to the Assumption A1, Theorem 3.6, and Lemma 3.7, the matrix A4 is Hurwitz;therefore, the asymptotic stability of x2 − z2 is ensured, which implies
(5.19) z2 (t) →t→∞ x2 (t) .
5.5. Observer for the original system. Thus, defining zT =[zT1 zT
2
], and
from (5.16) and (5.19), we conclude that
(5.20) z (t) →t→∞ x (t) .
Due to the coordinates change x = Px that we have used previously (P was defined in(3.5)), we have that the observer x for the original state vector has to be designed as
(5.21) x (t) = P−1z (t) = P−1
[z1 (t)z2 (t)
]
with z1 and z2 defined from (5.16) and (5.18), respectively.Theorem 5.3. The observer x given by (5.21) converges to the original state
vector x. That is,
x →t→∞ x (t) .
Proof. It is clear from (5.20) and (5.21).
6. Identification of unknown inputs w(t) (General case). Consider againthe system (2.1). Here, we apply the results obtained in section 4 for the estimationof the unknown inputs in the general case. That is, the proposed algorithm is notrequired to estimate the entire state vector since it is based on the necessary andsufficient conditions obtained at the end of section 4.
Using the transformation P defined according to (3.5), but with V selected ac-cording to (4.2), we have that the dynamic equations for the transformed systemx = Px takes the form(6.1) ⎡
⎣ ˙x1 (t)˙x21 (t)˙x22 (t)
⎤⎦ =
⎡⎣ A1 0 0
A21 A41 0A22 A42 A44
⎤⎦⎡⎣ x1 (t)
x21 (t)x22 (t)
⎤⎦ +
⎡⎣ B1
B21
B22
⎤⎦u +
⎡⎣ D1
D21
D22
⎤⎦ w (t)
y (t) = C1x1 (t) + Fw (t)w (t) = w (t) − K∗
1 x21 (t) ,
where x1 ∈ Rn1 , x21 ∈ Rn−n1−n2 , and x22? ∈ Rn2 . The partitions of the system anddistribution matrices comes from (3.9) and (4.4). The matrices not defined yet areB1 := Mn,ΣB,
[B21B22
]:= V +B,
[D21D22
]:= V +D. Since in the section 4 we have found the
conditions under which we can estimate w (·), throughout this section we will assumethat:6
B1 The set of the invariant zeros of Σ = (A, C, D, F ) that do not belong to the setof the (A, C)-unobservable eigenvalues is in C−.
Moreover, the use of the super-twisting algorithm as a differentiator imposes otherrestrictions related to the smoothness and boundedness of w (t), i.e.,B2 There is a known constant αw such that ‖w (t)‖ ≤ αw.
6It should be noticed that the assumption B1 is a structural assumption; meanwhile B2 is anassumption required by the algorithm used (super-twisting) to estimate the needed derivatives.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1168 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
Step 1.a Estimation of x1.As was established in section 4, for the estimation of w (t) it is enough to estimate
the states x1 and x21 (even in the case when x22 cannot be estimated). Therefore,we can estimate the reduced vector
[xT
1 xT21
]T following the same procedure givenin the previous section for estimating x. In other words, to estimate x1 and x21,we should follow the procedure of the previous section, but using the reduced vector[xT
1 xT21
]T instead of all the vector x =[xT
1 xT2
]T . Thus, z in subsection 5.1becomes z :=
[z1z21
](z1 ∈ Rn1 , z21 ∈ Rn−n1−n2), and its dynamics is governed by the
equations
(6.2) z = Az − Bu + L(y − Cz
),
where
A =[
A1 −D1K∗1
A21 A41 − D21K∗1
], B =
[B1
B21
], D =
[D1
D21
], C =
[C1 −FK∗
1
].
Notice that
H (s) =
⎡⎣sI − A1 −D1K
∗1
A21 sI − (A41 − D21K∗1 )
C1 −FK∗1
⎤⎦=
⎡⎣sI − A1 0 D1
A21 sI − A41 D21
C1 0 F
⎤⎦⎡⎣I 0 0
0 I 00 −K∗
1 I
⎤⎦
Since Σ has no invariant zeros (Lemma 3.4) and rank[DT
1 FT]T = q (B1 and
Theorem 4.8), the matrix H (s) loses rank only for s being an eigenvalue of A41.Thus, by the assumption B1 and Theorem 4.8, A41 is Hurwitz and, consequently,the pair (A, C) is detectable. Then, selecting the matrix L ∈ R(n−n2)×p in such away that (A − LC) is Hurwitz, we have, for e1 := x1 − z1, the inequality ‖e1‖ ≤γ exp (−λt) ‖e1 (0)‖ + μw+ for some constants γ, λ, μ. Therefore, for ζ satisfyingζ > μw+, we obtain the inequality ‖e1 (t)‖ < ζ. Thus, we estimate x1 by means of z1
given from (5.16) that is designed following the same procedure used in (5.9)–(5.12),but with z1 from (6.2).
Step 1.bEstimation of x21.The vector x21 must be estimated by means of z21 that has to be designed in the
following form:
z21 = z21 + D21
[D1
F
]+ [z1
0
]
˙z21 = A41z21 + A21z1 + B21u − D21
[D1
F
]+ [A1z1 + B1uC1z1 − y
]
Thus, from (6.1), we have that the dynamic equation for the difference (x21 − z21) isddt (x21 (t) − z21 (t)) = A41 (x21 (t) − z21 (t)), but the Assumption B1 and Theorem 4.8implies that A41 is Hurwitz. Therefore,
(6.3) z21 (t) →t→∞ x21 (t) .

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1169
Step 2 Estimation of w (t)Let us define r := rankF . If r < q, define G ∈ Rq×q as a nonsingular matrix so
that
(6.4)[D1
F
]G =
[D11 D12
0 F2
], F2 ∈ R
p×r, rankF2 = r.
If r = q, G := Iq×q . Now, let us make a partition of G−1 as
(6.5) G−1 =:[
G1
G2
], G1 ∈ R
(q−r)×q, G2 ∈ Rr×q.
Thus, from (6.4) and (6.5), we have
y (t) = C1x1 (t) + FGG−1w (t)= C1x1 (t) + F2G2w (t) .
Hence, premultiplying the last equation by F+2 , we obtain a linear combination of the
rows of w, i.e.,
(6.6) G2w (t) = F+2 y (t) − F+
2 C1x1 (t) .
Therefore, G2w (t) can be written as
(6.7) G2w (t) = F+2 y (t) − F+
2 C1x1 (t) + G2K∗1 x21 (t) .
Now, let zw be the state vector of the auxiliary system characterized by the equation
(6.8)zw (t) = A1z1 (t) + B1u + D11
(uw (t) − G1K
∗1 z21 (t)
)+ D12
(F+
2 y (t) − F+2 C1z1 (t)
).
Let us estimate G1w (t) using a sliding mode technique, specifically, the super-twisting.We design the sliding variable ξ in the following way:
(6.9) ξ (t) = D+11 [z1 (t) − zw (t)] .
Thus, in view of the identity D1w = D1GG−1w = D11G1w + D12G2w, from (6.1),(6.6), and (6.8), we achieve the equality
ξ (t) = G1w (t) − uw (t) − G1K∗1 (x21 (t) − z21 (t))
for all t ≥ tn1−1. Then, using
uw (t) = uw (t) + λ |ξ|1/2 sign ξ
˙uw (t) = α sign ξ (t)
α ≥ αw, λ > 1−θ(κ+α)1+θ
√2
κ−α , κ − α > 0, 0 < θ < 1,
there is a reaching time tw to the second-order sliding mode (ξ (t) = ξ (t) = 0, for allt ≥ tw > tn1−1). Hence, we get
(6.10) uw (t) = G1w (t) − G1K∗1 (x21 (t) − z21 (t)) .

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1170 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
Thus, from (6.3),
uw (t) →t→∞ G1w (t) .
Thus, the estimate of w (t) is done by means of
(6.11) w (t) = G
[uw (t)
F+2 y (t) − F+
2 C1z1 (t) + G2K∗1 z21 (t)
].
In view of (6.7), (6.10), and (6.5), we achieve the equality
w (t) = w (t) − K∗1 (x21 (t) − z21 (t)) + G
[0
F+2 C1 (x1 (t) − z1 (t))
].
However, from (5.17) and (6.3), we conclude that w (t) converges asymptotically tow (t), i.e.,
(6.12) w (t) →t→∞ w (t) .
Remark 4. It should be noticed that, for the case when B1 is fulfilled withrankMn = rankO (Theorem 4.7), xT =
[x1 x22
]. Therefore, the limit in (6.12)
becomes in the equality w (t) = w (t), for all t ≥ tw > tn1−1.
7. Numerical examples. Here we give two numerical examples. The first oneis to show the scheme of design for the estimation of the state of a strongly detectablesystem. The second example shows the scheme of design for the estimation of theunknown inputs of a system which is not strongly detectable.
7.1. Example 1. Consider the following academic example. Let a linear systembe governed by the following equations:⎡
⎢⎢⎢⎢⎣x1
x2
x3
x4
x5
⎤⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎣
−2.51 0.33 0.68 1.12 −0.250.14 −0.23 −0.31 0.91 0.360.51 −1.18 0.41 0.63 −0.770.22 0.33 0.46 0.65 −0.770.23 0.33 3.97 0.06 0.69
⎤⎥⎥⎥⎥⎦
︸ ︷︷ ︸A
⎡⎢⎢⎢⎢⎣x1
x2
x3
x4
x5
⎤⎥⎥⎥⎥⎦ +
⎡⎢⎢⎢⎢⎣
0.4300.921.20
−1.27
⎤⎥⎥⎥⎥⎦
︸ ︷︷ ︸B
(u + w1)
y =[1 0 0 0 00 1 0 0 0
]︸ ︷︷ ︸
C
x +[10
]︸︷︷︸
F
w2
Defining w =[w1 w2
]T , D =[B 05×1
], and F =
[02×1 F
], this linear system
takes the form of (2.1). In the simulations was used a control given by u = −Kx +1.5 sin (2t), K =
[0.57 5.66 1.25 6.94 1.68
]. The unknown inputs are w1 =
2 sin (2t) + 0.47 and w2 = − sin (2t) + 0.53.It can be verified that the set of the invariant zeros of Σ is {−1.84+0.48i,−1.84−
0.48i,−3.27}. Therefore, the system Σ is not strongly observable, but, from Theo-rem 3.6, it is strongly detectable.
Construction of the hierarchical observer for x1. The matrices M1,Σ and M2,Σ,computed following (3.3) for Σ = Σ, take the form M1,Σ =
[0 1
]and M2,Σ =[−1 0
0 1
]. As we can anticipate from Lemma 3.4 the matrix M2,Σ is invertible. We

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1171
0 2 4 6 8 10−10
−5
0
5
10
15
20
25
e 1
Time [s]0 2 4 6 8 10
−120
−100
−80
−60
−40
−20
0
20
40
Time [s]
e 2
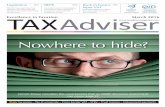
Fig. 7.1. Error of observation e1 = x1 − z1 and e2 = x2 − z2, for Example 1.
construct the Luenberger observer as in (5.2). Next, we construct σ as in (5.3). Inthis case n1 := dimM2,Σ = 2; therefore, it is needed to design only one sliding surfaces1 ∈ R2, which is designed as
s1 (t) =[−1 0
0 1
]︸ ︷︷ ︸
M−12,Σ
[1 0 00 0 1
]︸ ︷︷ ︸
M⊥⊥2,Σ T1,Σ
⎡⎢⎣
(F⊥C1)⊥⊥F⊥︷ ︸︸ ︷[
0 1]
(y (t) − C1σ (t))∫ t
0(y (τ) − C1z1 (τ)) dτ
⎤⎥⎦−
∫ t
0
v1 (τ) dτ
The matrices M⊥⊥2,Σ
and T1,Σ are designed following (3.3). The output injection v1
takes the form
v1i = v1
i + 20∣∣s1
i
∣∣1/2 sign s1i
˙v1i = 15 sign s1
i , i = 1, 2
Thus, we have that the reconstruction of x1 is done by z1 (t) = z1 (t) + v(n1−1)1 (t).
The observer z2 (t) for x2 is designed according to (5.18), for this observer any gainis not needed to be calculated. In the Figure 7.1 the observation errors e1 = x1 − z1
and e2 = x2 − z2 are drawn. For the simulations we use a sampling step of 10−4.Then the hierarchical observer for the original state x is designed as x := P−1z.
The trajectories of x (t) together with the trajectories of its observer x (t) are depictedin Figure 7.2.
7.2. Example 2. Consider the following nonstrongly detectable system.⎡⎢⎢⎢⎢⎣x1
x2
x3
x4
x5
⎤⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎣0 1 0 0 00 0 1 0 01 0 0 0 00 0 0 0 10 1 0 0 0
⎤⎥⎥⎥⎥⎦
︸ ︷︷ ︸A
⎡⎢⎢⎢⎢⎣x1
x2
x3
x4
x5
⎤⎥⎥⎥⎥⎦
︸ ︷︷ ︸x
+
⎡⎢⎢⎢⎢⎣0 0 01 0 00 1 00 0 01 0 0
⎤⎥⎥⎥⎥⎦
︸ ︷︷ ︸D
⎡⎣w1
w2
w3
⎤⎦
︸ ︷︷ ︸w
y =
⎡⎣1 0 0 0 00 0 0 0 10 0 1 0 0
⎤⎦
︸ ︷︷ ︸C
x +
⎡⎣0 0 00 0 00 0 1
⎤⎦
︸ ︷︷ ︸F
w

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1172 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
0 2 4 6 8 10
−20
0
20
0 2 4 6 8 10
−100
102030
0 2 4 6 8 10−100
−50
0
50
x1,x
1x
2,x
2x
3,x
3
Time [s]
0 2 4 6 8 10−50
0
50
0 2 4 6 8 10
−200
−100
0
100
x4,x
4x
5,x
5Time [s]
Fig. 7.2. Trajectories of x (t) (solid) and x (t) (dashed), for Example 1.
Next we present the matrix V that forms a basis of V∗Σ (see (3.4) and(4.2)) and the
matrix N that forms a basis of N ∗ (see (4.1)). Also the matrix P that changes thecoordinates of the system is written below (see (3.5)).
V = N =
⎡⎢⎢⎢⎢⎣00010
⎤⎥⎥⎥⎥⎦ , P =
⎡⎢⎢⎢⎢⎣0 1 0 0 00 0.7071 −0.7071 0 01 0 0 0 00 0 0 0 10 0 0 1 0
⎤⎥⎥⎥⎥⎦
Thus, by the change of coordinates x = Px, we get the decomposition obtained in(4.5).⎡⎢⎢⎢⎢⎣
˙x1,1
˙x1,2
˙x1,3
˙x1,4
˙x22
⎤⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎣
1 −1.41 0 0 00.707 −1 −707 0 0
1 0 0 0 01 0 0 0 00 0 0 1 0
A44
⎤⎥⎥⎥⎥⎦
⎡⎢⎢⎢⎢⎣
x1,1
x1,2
x1,3
x1,4
x22
⎤⎥⎥⎥⎥⎦
︸ ︷︷ ︸x
+
⎡⎢⎢⎢⎢⎣
1 0 00.707 −707 0
0 0 01 0 00 0 0
⎤⎥⎥⎥⎥⎦⎡⎣w1
w2
w3
⎤⎦
y =
⎡⎣0 0 1 0 00 0 0 1 01 −1.41 0 0 0
⎤⎦ x +
⎡⎣0 0 00 0 00 0 1
⎤⎦⎡⎣w1
w2
w3
⎤⎦
It can be verified that rank[
DT1 FT
]T = 3, rankM4,Σ = rankO = 4. Thus,the condition of theorem 4.9 is accomplished, which implies that w can be recon-structed in a finite time. In this case the weakly unobservable subspace correspond-ing to Σ = (A, C, D, F ) and the unobservable subspace corresponding to (A, C) areidentical. It means that A4 = A44 and, consequently, x21 does not exist. Therefore,for the reconstruction of the w only x1 has to be reconstructed.
Nevertheless, since A44 = 0, according to Lemma 3.7, the system Σ has onlyone invariant zero, which is equal to zero. Hence, Σ is nonstrongly detectable, butalso notice that (A, C) is nondetectable. Hence, the state vector cannot be estimatedneither in finite time nor asymptotically.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1173
0 1 2 3 4 5 6 7 8 9 10−2
0
2
4
0 1 2 3 4 5 6 7 8 9 10−4
−2
0
2
4
0 1 2 3 4 5 6 7 8 9 10
−2
0
2
4
Time [s]
w1
w2
w3
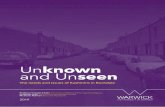
Fig. 7.3. Comparison between wi (solid) and their estimate wi (dashed), i = 1, 2, 3, for Exam-ple 2.
Using the method proposed in section 6 we can estimate the unknown inputsvector w. Firstly, for the estimation of x1 the use of two sliding surfaces was needed,s1 and s2, designed according to 5.9 and 5.11. The next step was the estimation of w.The estimate of wi is given by wi (i = 1, 2, 3), respectively, and it is shown in Figure7.3.
Conclusions. We have shown that, for a system with unknown inputs appearingexplicitly in both the state equations and the system output, the strong detectabilityis a necessary and sufficient condition for the estimation of the original state vector.Since if the system is not strongly observable, it is impossible to design a standarddifferential observer providing state estimate. Hence, we have proposed another ap-proach related to the design of an algebraic-type observer. We have shown that thesuggested approach can successfully work for both strongly observable and stronglydetectable systems. Thus, we have proposed to decompose the system into two sub-systems. The first one is strongly observable for the zero control input. The secondone is not strongly observable but can be detected. Thus, in the new coordinates, oneuses the output of the system and its derivatives unaffected by the unknown inputto reconstruct the state vector of the first subsystem. For the second subsystem oneneeds to design an observer that converges asymptotically to the state vector of thesecond subsystem. This scheme of design brings as a result an observer whose tra-jectories converge to those of the original state vector and whose rate of convergencedoes not depend on the unknown inputs.
Furthermore, we have shown that left invertibility is not a sufficient conditionunder which the estimation can be carried out. But also we have shown that a systemcan be nonstrongly detectable, even nondetectable as we saw in the Example 2, andthe estimation of the unknown inputs can still be carried out.
Perhaps as the most important result of this paper, we have proven that thenecessary and sufficient condition under which the estimation of the unknown inputscan be carried out is that the set of the invariant zeros of the system (with respectto the unknown inputs) that do not belong to the set of unobservable eigenvalues isin the interior of the set of complex numbers with negative real part. Based on theseresults we have proposed a scheme of design for the estimation of the unknown inputs.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1174 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
Appendix. Proofs of propositions, lemmas, and theorems.Proof of Lemma 3.4. From (3.10), dim kerMn,ΣK∗,P
= dim kerMn,Σ. Then,applying (3.3) for calculating Mn,ΣK∗,P
, we get that Mn,ΣK∗,P=
[Mn1,Σ 0
], where
Mn,ΣK∗,P∈ R
n1×n, Mn1,Σ ∈ Rn1×n1 . Taking into account that rankMn,ΣK∗,P
= n1,one can conclude that kerMn1,Σ = V ∗
Σ= 0.
Proof of Lemma 3.7. From (3.8) and by a rearranging of matrices we get
rankP (s) = rank[P 00 I
] [sI − A − D
C F
] [P−1 0
K∗P−1 I
]
= rank[sI − P
(A + DK∗)P−1 −PD(
C + FK∗)P−1 F
]= rank
⎡⎣sI − A1 −D1 0
C1 F 0−A2 −D2 sI − A4
⎤⎦ .
From Lemma 3.4 and Fact 1, Σ := (A1, C1, D1, F ) has no invariant zeros. This meansthat for the case rank
[DT
1 FT]T = q the only way that the previous arrangement
of matrices can lose rank is when s is an eigenvalue of A4. This proves the clause a).On the other hand, if rank
[DT
1 FT]T
< q, there exists a nonsingular matrix7
G ∈ Rq×q so that[−D1
F
]G =
[H1 0H2 0
]. Hence,
rank P (s) = rank
⎡⎣sI − A1 H1 0 0
C1 H2 0 0−A2 D21 D22 sI − A4
⎤⎦
with P (s) defined in (3.2) and[D21 D22
]:= −D2G. Thus, P (s) loses rank for
every s ∈ C, so the clause b) is proven.Proof of Lemma 4.2. Necessity: suppose rank
[DT
1 FT]T
< q. Then there
is a constant vector v ∈ Rq, v �= 0, so that[DT
1 FT]T
v = 0. Let us choosew1 (t) = K∗x2 (t) + v and w2 (t) = K∗x2 (t). Thus, for x0 = 0, from (3.8), we havethat yw1,x0 (t) = yw2,x0 (t) = 0; meanwhile, w1 (t)−w2 (t) = v �= 0. Thus, the necessityis proven.
Sufficiency: suppose rank[DT
1 FT]T = q. Let w1 (t) and w2 (t) be two in-
puts so that yw1,x0 (t) = yw2,x0 (t) for all t ≥ 0. Now, notice that the equalityxw1,x0 (t)− xw2,x0 (t) = x0,w1−w2 (t) is valid for any initial condition x0 (by notation,x0,w1−w2 (0) = 0). Thus, the initial condition for the transformed system x0,w1−w2 (t)with unknown input w1 (t) − w2 (t) is x0,w1−w2 (0) = Px0,w1−w2 = 0. Furthermore,we have that y0,w1−w2 (t) = yw1,x0 (t) − yw2,x0 (t) = 0 for all t ≥ 0. This, due to thefact that Σ = (A1, C1, D1, F ) is strongly observable, implies that x10,w1−w2
(t) = 0 forall t ≥ 0, which, from (3.8), leads to the equality
(A.1) w1 (t) − w2 (t) − K∗x2,w1−w2 (t) = 0, for all t ≥ 0
Therefore, we have that ˙x2,w1−w2 (t) = A4x2,w1−w2 (t), and since xw1−w2 (0) = 0, weget x2,w1−w2 (t) ≡ 0. The last equality and (A.1) imply that w1 (t) = w2 (t), whichproves the sufficiency.
7Actually, G is used to divide the matrix J :=[−D1
F
]. Indeed, let G2 be a matrix whose
columns span the kernel of J , and let G1 be a matrix so that G =[G1 G2
]is not singular. Thus,
JG =[H 0
].

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1175
Proof of Proposition 4.4. Partitioning K∗ and Q as K∗ =:[
K∗1 K∗
2
]and
Q =:[
Q1 Q3Q2 Q4
], the equations in (3.6) can be rewritten in the form
A[
V N]+ D
[K∗
1 K∗2
]=
[V Q1 + NQ2 V Q3 + NQ4
]C
[V N
]+ F
[K∗
1 K∗2
]= 0
From there we can obtain the equations
AN + DK∗2 = V Q3 + NQ4(A.2)
CN + FK∗2 = 0(A.3)
Taking into account that Mn,ΣV = 0 and CN = 0, we achieve the identities
Mn,ΣAN + D1K∗2 = 0
FK∗2 = 0
Furthermore, since N spansN ∗, AN ∗ ⊂ N ∗ ⊂ V∗Σ, and Mn,ΣV∗
Σ = 0, then, Mn,ΣAN =0. Therefore,
[D1F
]K∗
2 = 0, which, from the first assumption of the proposition, impliesK∗
2 = 0. Moreover, since the span of AN belongs to the span of N and because of Vand N are linearly independent, from (A.2) we conclude that Q3 = 0.
Proof of Lemma 4.6. For V given by (4.2) and from the Proposition 4.4, we haveK∗N = K∗V +N = 0. Furthermore,
(A + DK∗)V = V Q; thus, from (4.3) and (4.4),
we get AN = NA44. Hence, with P−1 =[
M+n,Σ V N
], we can decompose the
pair (A, C) in its observable and unobservable part. Indeed, first let us make thefollowing matrix transformation,
PAP−1 =[A1 0A2 A44
], CP−1 =
[C 0
],
where A1 = Mn,ΣA[M+
n,Σ V], A2 = V +A
[M+
n,Σ V], and C = C
[M+
n,Σ V]. It is
known that, for this kind of transformation, the pair (A1,C) is observable (see, e.g.,[26]), and the (A, C)-unobservable eigenvalues are the eigenvalues of the matrix A44,which proves the clause a). Besides, as it was established in Lemma 3.7, the invariantzeros of (A, C, D, F ) are the eigenvalues of A4. Therefore, taking into account thespecific form of A4 obtained in (4.4), the set of invariant zeros of Σ that do not belongto the set of (A, C)-unobservable eigenvalues is identical to the set of eigenvalues ofA41, which proves Lemma b).
Proposition A.1. Under the condition N ∗ �= V∗Σ, for any matrices V and K∗
1
satisfying (4.2) and (4.3), respectively, the pair (A41, K∗1 ) is observable.
Proof of Proposition A.1. Suppose that (A41,K∗1 ) is unobservable, then there is a
vector p �= 0 so that A41p = λp and K∗1p = 0 for some scalar constant λ. Then, since
A41 = Q1, from (3.6), (4.2), and (4.3), we have
A[
V p N]
=[
V p N] [ λ 0
Q2p Q4
]C
[V p N
]= 0.
That is, the span of[
V p N]is an A-invariant subspace with dimension bigger than
N ∗, which is a contradiction since N ∗ is the greatest A-invariant subspace belongingto kerC.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1176 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
Proof of Theorem 4.7. Firstly, let us prove the equivalence (iii)⇔(iv). If (iii) istrue, from Lemma 4.2 rank
[DT
1 FT]T = q. Furthermore, since kerMn,Σ = V∗ =
N ∗ = kerO, we have rankMn,Σ = rankO. On the other hand, if (iv) is true, then
dimV∗ = dim kerMn,Σ = n − rankMn,Σ = n − rankO = dim kerO = dimN ∗
Therefore, V∗ = N ∗. The previous identity and Lemma 4.2 prove the implication ⇐).The proof of (ii)⇔(iv) is as follows. Supposing that (iv) is true, since V = N ,
P−1 =[
M+n,Σ N
]and A4 = A44. Therefore, the set of eigenvalues of A4 is at
the same time the set of the invariant zeros of Σ and the set of (A, C)-unobservableeigenvalues. Thus, ⇐) is proven. Now, suppose that (ii) is satisfied. Then, byLemma 3.7.b), rank
[DT
1 FT]T = q. Moreover, by Lemma 3.7.a) and Lemma 4.6.a),
A4 = A44, i.e., dimV∗ = n − n1 − n2 = dimN ∗, which implies rankMn,Σ = rankO.Thus, the implication ⇒) is proven.
Now, let us prove the equivalence (i)⇔(iv). Suppose V∗ �= N ∗, then by choosingx1 (0) = 0 and w (t) = k∗
1 x21 (t), we obtain the identities x1 (t) ≡ 0, y (t) ≡ 0, and˙x21 (t) = A41x21 (t). Thus, for the proposition (A.1), if x21 (0) �= 0, w �= 0. Thismeans that for V∗ �= N ∗ there exist the conditions such that w (t) �= 0 in spite ofy (t) ≡ 0. Therefore, the claim (i) is achieved only if the identity V∗ = N ∗ is true,that is, if rankMn,Σ = rankO. Furthermore, it is clear that the left invertibilityproperty is necessary for fulfilling (4.6). Therefore, by Lemma 4.2 we have thatrank
[DT
1 FT]T = q, and (i)⇒(iv) is proven. Now, suppose that (iv) is true and
y (t) ≡ 0. Then, we have, from Lemma 3.4, x1 (t) ≡ 0 and w (t) ≡ 0. But, because ofin this case V = N , then w (t) = w (t) ≡ 0. Therefore, (iv)⇒(i) is proven.
Part of the proof of Theorem 4.8 is based on the following proposition.Proposition A.2. The set of the invariant zeros of Σ that do not belong to the
set of (A, C)-unobservable eigenvalues is in C− if, and only if,
(A.4) rank[D1
F
]= q and A41 is Hurwitz.
Proof of Proposition A.2. Suppose rank[D1F
]< q, then any s ∈ C is an invariant
zero of Σ (Lemma 3.7). Hence, since the set of (A, C)-unobservable eigenvalues isfinite, in this case, there is a set (infinite) of invariant zeros of Σ that do not belongto the set of (A, C)-unobservable eigenvalues having positive real part. Thus, we haveproven that rank
[D1F
]= q, which implies, due to Lemma 4.6, that A41 is a Hurwitz
matrix.The sufficiency comes from (A.4) and Proposition 4.6.b).Proof of Theorem 4.8. The equivalence (ii)⇔(iii) follows directly from Proposition
A.2.Now, suppose that the clause (i) is true. From the proof of necessity of Lemma 4.2,
we have that the condition rank[D1F
]= q is essential for fulfilling the clause (i).
Now, selecting x1 (0) = 0 and w (t) = K∗21x21, we obtain the identities x1 (t) ≡ 0,
˙x21 (t) = A41x21 (t), and y (t) ≡ 0; therefore, w (t) → 0. Now, if V∗ = N ∗, the set ofeigenvalues of A41 is empty. If V∗ �= N ∗, by Proposition A.1, w (t) tends to zero if,and only if, x21 (t) tends to zero. Hence, we conclude that A41 is Hurwitz. Thus, wehave the implication (i)⇒(iii).
Now, suppose that (iii) is true. If y (t) ≡ 0, we have x1 (t) ≡ 0, ˙x21 (t) =A41x21 (t), and w (t) = K∗
1 x21 (t). Since A41 is Hurwitz, it means x21 (t) → 0 and sow (t) → 0. Thus, the implication (i)⇐(iii) is proven.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
UNKNOWN INPUT AND STATE ESTIMATION 1177
Proof of Theorem 4.9. Evidently, the implication (4.7) is a necessary condition forthe estimate of w. Hence, the necessity follows from Theorem 4.8. Now, suppose thatthe invariant zeros of Σ not belonging to the set of (A, C)-unobservable eigenvalueshave negative real part. Then, from the proposition A.2, rank
[D1F
]= q and all the
eigenvalues of A41 have negative real part. Thus, from (4.5), w (t) can be expressedby the following equation:
(A.5) w (t) =[D1
F
]+ [˙x1 (t) − A1x1 (t)
y − C1x1 (t)
]Since x1 always can be reconstructed using (3.11), also w (t) can be reconstructed.Thus, estimating w = w (t) + K∗
1 x21 is equivalent to estimating K∗1 x21. Hence, sub-
stituting w, given by (A.5), into the dynamic equation of x21, and defining
(A.6)
˙z21 = A41z21 + A21x1 − D21
[D1
F
]+ [A1x1
C1x1 − y
]
z21 = z21 + D21
[D1
F
]+ [x1
0
],
we obtain that dynamic equation for the error e21 := x21 − z21 is e21 (t) = A41e21 (t).Thus, since the eigenvalues of A41 have negative real part, then z21 (t) → x21 (t)as t → ∞. Obviously K∗
1 z21 (t) → K∗1 x21 (t) (as t → ∞). This completes the
proof.Proof of Theorem 4.10. The necessity comes from (4.6) and Theorem 4.7. On
the other hand, if the set of the invariant zeros of Σ is identical to the set of (A, C)-unobservable eigenvalues, then V = N and the identity w (t) = w (t) holds. Therefore,w can be reconstructed directly from (A.5) with x1 obtained from (3.11).
Acknowledgments. The authors thank Dr. Christopher Edwards, Dr. ThierryFloquet, and Prof. Mehrdad Saif for their fruitful discussions. The work of L. Fridmanwas supported by the Mexican CONACYT under the Grant 56819, the PAPIIT (Pro-grama de Apoyo a Proyectos de Investigacion e Inovacion Tecnologica) UNAM underGrant 111208, and the PAPIME (Programa de Apoyo a Proyectos Institucionalespara el Mejoramiento de la Ensenanza) PE 100907. The work of F.J. Bejarano wassupported by the Mexican CONACYT postdoctoral grant, CVU 103957.
REFERENCES
[1] T. Ahmed-Ali and F. Lamnabhi-Lagarrigue, Sliding observer-controller design for uncertaintriangular nonlinear systems, IEEE Trans. Automat. Control, 44 (1999), pp. 1244–1249.
[2] J. Alvarez, Y. Orlov, and L. Acho, An invariance principle for discontinuous dynamic sys-tems with application to a coulomb friction oscillator, J. Dynamic Systems, Measurement,and Control, 122 (2000), pp. 687–690.
[3] J. Barbot, M. Djemai, and T. Boukhobza, Sliding mode observers, in Sliding Mode Controlin Engineering, W. Perruquetti and J. Barbot, eds., Control Engineering, Marcel Dekker,New York, 2002, pp. 103–130.
[4] G. Bartolini, A. Levant, A. Pisano, and E. Usai, Higer-order sliding modes for the output-feedback control of nonlinear uncertain systems, in Variable Structure Systems: Towardsthe 21st Century, X.Yu and J.-X.Xu, eds., Lecture Notes in Control and InformationScience, Springer Verlag, Berlin, 2002, pp. 83–108.
[5] G. Bartolini, A. Pisano, E. Punta, and E. Usai, A survey of applications of second-ordersliding mode control to mechanical systems, Int. J. Control, 76 (2003), pp. 875–892.
[6] G. Basile and G. Marro, Controlled and Conditioned Invariants in Linear System Theory,Prentice Hall, Englewood Cliffs, NJ, 1992.

Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1178 F.J. BEJARANO, L. FRIDMAN, AND A. POZNYAK
[7] F. Bejarano, L. Fridman, and A. Poznyak, Exact state estimation for linear systems withunknown inputs based on hierarchical super-twisting algorithm, Int. J. Robust and Nonlin-ear Control, 17 (2007), pp. 1734–1753.
[8] F. Bejarano, A. Poznyak, and L. Fridman, Hierarchical second-order sliding mode observerfor linear time invariant systems with unknown inputs, Int. J. Systems Sciences, 38 (2007),pp. 793–802.
[9] J. Davila, L. Fridman, and A. Poznyak, Observation and identification of mechanical sys-tems via second order sliding modes, Int. J. Control, 79 (2006), pp. 1251–1262.
[10] C. Edwards, S. Spurgeon, and R. Hebden, On development and applications of sliding modeobservers, in Variable Structure Systems: Towards XXIst Century, J. Xu and Y. Xu, eds.,Lecture Notes in Control and Information Science, Springer Verlag, Berlin, Germany, 2002,pp. 253–282.
[11] C. Edwards and S. Spurgeon, Sliding Mode Control, Taylor and Francis, London, 1998.[12] T. Floquet and J. Barbot, A canonical form for the design of unknown imput sliding mode
observers, in Advances in Variable Structure and Sliding Mode Control, C. Edwards, E. Fos-sas, and L. Fridman, eds., Lecture Notes in Control and Information Sciences 334, SpringerVerlag, Berlin, 2006, pp. 271–292.
[13] T. Floquet, C. Edwards, and S. Spurgeon, On sliding mode observers for systems withunknown inputs, Int. J. Adapt. Control Signal Process, 21 (2007), pp. 638–656.
[14] L. Freidovich and H. Khalil, Lyapunov-based switching control of nonlinear systems usinghigh-gain observers, Automatica, 43 (2007), pp. 150–157.
[15] H. Hashimoto, V. Utkin, J. Xu, H. Suzuki, and F. Harashima, Vss observer for linear timevarying system, in Procedings of IECON’90, Pacific Grove, CA, 1990, pp. 34–39.
[16] M. Hautus, Strong detectability and observers, Linear Algebra Appl., 50 (1983), pp. 353–368.[17] A. Levant, Sliding order and sliding accuracy in sliding mode control, Int. J. Control, 58
(1993), pp. 1247–1263.[18] A. Levant, Robust exact differentiation via sliding mode technique, Automat., 34 (1998),
pp. 379–384.[19] A. Levant, High-order sliding modes: Differentiation and output-feedback control, Int. J. Con-
trol, 76 (2003), pp. 924–941.[20] B. Molinari, A strong contollability and observability in linear multivariable control, IEEE
Trans. Automat. Control, 21 (1976), pp. 761–764.[21] Y. Orlov, L. Aguilar, and J. Cadiou, Switched chattering control vs. backlash/friction
phenomena in electrical servo-motors, Int. J. Control, 76 (2003), pp. 959–967.[22] A. Poznyak, Deterministic output noise effects in sliding mode observation, in Variable struc-
ture systems: from principles to implementation, A. Sabanovic, L. Fridman, and S. Spur-geon, eds., IEEE Control Engineering Series, IEEE, London, 2004, pp. 45–80.
[23] M. Saif and Y. Xiong, Sliding mode observers and their application in fault diagnosis, in FaultDiagnosis and Fault Tolerance for Mechatronic Systems: Recent Advances, F. Caccavaleand L. Villani, eds., vol. 1/2003 of Springer Tracts in Advanced Robotics, Springer, Berlin,2003, pp. 1–57.
[24] Y. Shtessel, I. Shkolnikov, and M. Brown, An asymptotic second-order smooth slidingmode control, Asian J. Control, 5 (2003), pp. 498–504.
[25] C. Tan and C. Edwards, Sliding mode observers for robust detection and reconstruction ofactuator and sensor faults, Int. J. Robust Nonlinear Control, 13 (2003), pp. 443–463.
[26] H. Trentelman, A. Stoorvogel, and M. Hautus, Control Theory for Linear Systems, Com-munications and control engineering, Springer, New York, London, 2001.
[27] V. Utkin, J. Guldner, and J. Shi, Sliding Modes in Electromechanical Systems, Taylor andFrancis, London, 1999.