Unified ” Flight Mechanics and Aeroelasticity for Accelerating ...
12
6-l Unified ” Flight Mechanics and Aeroelasticity for Accelerating, Maneuvering, Flexible Aircraft Dr. James J. Olsen Olsen Engineering Consulting 1186 Tralee Trail Dayton, Ohio 45430- 12 19 United States Abstract ‘Ibis paper reveals new insights in the acroclasticity and flight muhanics of flexible aircraft by obtaining and solving the equations of motion for a flexible, accclcrating, rotating aircraft. We illustrate the approach for three cases of increasing complexity: The first cast is a “sprung” pendulum. It shows when rigid body angular v&cities can be important in the flexibility equations as they approach as the flexible frequencies. The secxmd case is a typical section airfoil on an accelerating, rotating fuselage. It applies I agrange’s equations to a longitudinal problem in inertial coordinates, thin transforms the equations to noninertial, body - fixed coordinates for solution. It also shows when rigid body rotations and longihidinal accelerations must bc included in the flexibility equations. ‘l’hc third case is the general longitudinal/lateral motion of an accelerating, rotating, flexible vehicle. Rather than setting up the general problem in inertial coordinates and then transforming to body - fixed coordinates, instead WCUSC the idea of “ouasi - coordinates”. We establish a gcncral form for J.agrangc’s equations in the noninertial, body - fixed coordinates. ‘lhe paper gives the gtncral equations and reduces them to a special case of a “flat” airplane. It also gives guidelines as to when the rigid body rotations and accelerations are important factors in the flexibility equations. 1. Introduction l;or many years there has been a search for a practical set of “unified” equations of motion that can bc used in all of the disciplines of aerodynamics, structures and stability and control of flexible aircraft. Such an approach would allow the customary dctcrmination of the effects of structural flexibility on aircraft pczformance, stability and air loads. An added benefit is that it would also allow us to determine the effects of the “rigid body” motions on aeroelastic characteristics such as conlrol - effcctivencss, divergcncc and flutter. l+uther (and most importantly), it would allow all of those cnginccring problems to bc treated by subsets of a single set of “unified” quations. In effect we want to convert the aeroclastic problems into coordinate systems and equations that arc conventional for aircraft tlight mechanics, stability and control. In many aircraft applications, the mutual coupling of rigid body and flexible motions has been small because the vchiclc angular vclocitics and flcxiblc frqucncics wcrc well scparattil. 1lowcver, thcrc have been recent examples of large aircraft whcrc flexible frcqutncics (say 2 I 1~) begin to approach the rigid body angular velocities (say 1 IL). Other cases have been known where the aerodynamic forces can drive the structural fqucncics and the rigid body frcqucncies close together. In both cilses the coupling effects should be accounted for in the lowest order equations of motion to obtain the correct modcling. ‘lo develop the necessary equations WC must account for the fact that the aircraft’s body - fixed coordinate system is not (in gcncral) an inertial system. Dusto et al 111, Hekir et al 1 2 1 and Was& and Schmidt I3 1 ate a few examples of earlier attempts which have had to leave out crucial terms or were difficult to implement. ‘lhis paper shows that a practiclll set of equations for gcncral problems is available through the use of energy methods, Iqrangc’s equations and “quasi - coordinates”. WC illustrate the approach for three casts of increasing complexity: ‘lhc first case is a “sprung” pendulum. It shows when rigid body an&ar velocities can be important in the flexibility equations as they approach as the flexible frequencies. The ,wrnd case is a typical section airfoil on an accelcraiing, rotating fuselage. It applies I agrange’s equations to a longitudinal problem in in&al coordinates, then transforms the equations to non&M, body - fixed coordinates for solution. It also shows whcv rigid body rotations and hmgitudinal accclcrations must be included in the flexibility equations. ‘I’hc third case is the general longitudinal/lateral motion of an accelerating, rotating, flexible vchiclc. Rather than setting up the general problem in inertial coordinates and then transforming to body - fixed coordinates, instead we use the idea of’ “ouasi - coordinates”. WC establish a gcncral form for I .agrange’s equations in the noninertial, body - fixed coordinates. The paper gives the general equations and reduces them to a special case of a “flat” airplane. It also gives guidelines as to when the rigid body rotations and accelcratious are important factors in the flexibility equations. ‘lhc equations become somcwhat more complicated, and it is useful lo cxaminc them in three stages. l;irst, some Paper presented at the RTO AVT Specialists’ Meeting on “Structural Aspects of Flexible Aircraji Control”, held in Ottawa, Canada, 18-20 October 1999, and published in RTO MP-36.
-
Upload
khangminh22 -
Category
Documents
-
view
5 -
download
0
Transcript of Unified ” Flight Mechanics and Aeroelasticity for Accelerating ...

6-l
Unified ” Flight Mechanics and Aeroelasticity
for Accelerating, Maneuvering, Flexible Aircraft
Dr. James J. Olsen Olsen Engineering Consulting
1186 Tralee Trail Dayton, Ohio 45430- 12 19
United States
Abstract
‘Ibis paper reveals new insights in the acroclasticity and flight muhanics of flexible aircraft by obtaining and solving the equations of motion for a flexible, accclcrating, rotating aircraft. We illustrate the approach for three cases of increasing complexity: The first cast is a “sprung” pendulum. It shows when rigid body angular v&cities can be important in the flexibility equations as they approach as the flexible frequencies. The secxmd case is a typical section airfoil on an accelerating, rotating fuselage. It applies I agrange’s equations to a longitudinal problem in inertial coordinates, thin transforms the equations to noninertial, body - fixed coordinates for solution. It also shows when rigid body rotations and longihidinal accelerations must bc included in the flexibility equations. ‘l’hc third case is the general longitudinal/lateral motion of an accelerating, rotating, flexible vehicle. Rather than setting up the general problem in inertial coordinates and then transforming to body - fixed coordinates, instead WC USC the idea of “ouasi - coordinates”. We establish a gcncral form for J.agrangc’s equations in the noninertial, body - fixed coordinates. ‘lhe paper gives the gtncral equations and reduces them to a special case of a “flat” airplane. It also gives guidelines as to when the rigid body rotations and accelerations are important factors in the flexibility equations.
1. Introduction
l;or many years there has been a search for a practical set of “unified” equations of motion that can bc used in all of the disciplines of aerodynamics, structures and stability and control of flexible aircraft. Such an approach would allow the customary dctcrmination of the effects of structural flexibility on aircraft pczformance, stability and air loads. An added benefit is that it would also allow us to determine the effects of the “rigid body” motions on aeroelastic characteristics such as conlrol - effcctivencss, divergcncc and flutter. l+uther (and most importantly), it would allow all of those cnginccring problems to bc treated by subsets of a single set of “unified” quations. In effect we want to
convert the aeroclastic problems into coordinate systems and equations that arc conventional for aircraft tlight mechanics, stability and control.
In many aircraft applications, the mutual coupling of rigid body and flexible motions has been small because the vchiclc angular vclocitics and flcxiblc frqucncics wcrc well scparattil. 1 lowcver, thcrc have been recent examples of large aircraft whcrc flexible frcqutncics (say 2 I 1~) begin to approach the rigid body angular velocities (say 1 IL). Other cases have been known where the aerodynamic forces can drive the structural fqucncics and the rigid body frcqucncies close together. In both cilses the coupling effects should be accounted for in the lowest order equations of motion to obtain the correct modcling.
‘lo develop the necessary equations WC must account for the fact that the aircraft’s body - fixed coordinate system is not (in gcncral) an inertial system. Dusto et al 111, Hekir et al 1 2 1 and Was& and Schmidt I3 1 ate a few examples of earlier attempts which have had to leave out crucial terms or were difficult to implement. ‘lhis paper shows that a practiclll set of equations for gcncral problems is available through the use of energy methods, Iqrangc’s equations and “quasi - coordinates”.
WC illustrate the approach for three casts of increasing complexity: ‘lhc first case is a “sprung” pendulum. It shows when rigid body an&ar velocities can be important in the flexibility equations as they approach as the flexible frequencies. The ,wrnd case is a typical section airfoil on an accelcraiing, rotating fuselage. It applies I agrange’s equations to a longitudinal problem in in&al coordinates, then transforms the equations to non&M, body - fixed coordinates for solution. It also shows whcv rigid body rotations and hmgitudinal accclcrations must be included in the flexibility equations. ‘I’hc third case is the general longitudinal/lateral motion of an accelerating, rotating, flexible vchiclc. Rather than setting up the general problem in inertial coordinates and then transforming to body - fixed coordinates, instead we use the idea of’ “ouasi - coordinates”. WC establish a gcncral form for I .agrange’s equations in the noninertial, body - fixed coordinates. The paper gives the general equations and reduces them to a special case of a “flat” airplane. It also gives guidelines as to when the rigid body rotations and accelcratious are important factors in the flexibility equations.
‘lhc equations become somcwhat more complicated, and it is useful lo cxaminc them in three stages. l;irst, some
Paper presented at the RTO AVT Specialists’ Meeting on “Structural Aspects of Flexible Aircraji Control”, held in Ottawa, Canada, 18-20 October 1999, and published in RTO MP-36.

6-2
insight is available via a simplification which considers the rigid body motions mcrcly as constant parameters. ‘there the rigid body motions alter the flexible frequencies of vibration, thereby altering aeroelastic stability. Second, a more exact approach is to rcco&?lire that the flexibility equations have some of the characteristics of Mathieu’s classical ordinary differential q&on. The similarity to Mathieu’s equation introduces the possibility that the coupled rigid - body/flexible motions can bc unstable within narrow ranges of frequencies and amplitudes, even without aerodynamic forces. m, the ultimate procedure is always available - the simultaneous solution (perhaps numerically) of the fully coupled, non - linear, rigid body and flexibility equations of motion in body - fixed coordinates.
2. Law-awe’s Eauations
If the inertial coordinates of a dynamic system can be represented in terms of N independent gencrtlizcd coordinates:
Lagrange’s equations [ 4 1 can describe the motion of the system:
where: L = Lagrangian, T - U
Qi = Generalized Force
T = Kinetic Energy
U = Potential Energy
For simple geometries, it usually is a straightforward matter to write down the inertial coordinates, inertial velocities, kinetic and potential energies, the Lagrangian, and the various derivatives. For complicated geometries, the process can become tedious, but Whittake& 5 1 showed that, if the kinetic energy can be expressed in terms of the coefficients r?Qj
T = $ i f: mgYikj i=l jl
‘kn the equations of motion can bc written
. . n"iJ4i j=l
where the Christoffel symbol is:
Olsen1 6 1 showed a related (rind sometimes) simpler approach, noting that if we could write the partial derivatives:
xij =d2X aYic7q j
yYj = 32y (hi&ij
zij = -ia- Niaqj
We don’t need the often tedious expressions for the kinetic energy, and the equations of motion take the form:
where:
mij = s(x’Xj + KYj + ~Zj)lhI
mass
mijk = J(XiXjk + qqk + z$jk)dm
mmis
Even though Whittaker’s and Olsen’s expressions look simple in principle, in practice their implementation can be quite lengthy for complicated geometries with many degrees of freedom. The development of the rcquircd expressions can be greatly assisted by symbolic algebra softw;lre.
3. Examnle of Cowled Rieid - Flexible Motions. The “Srwung” Pendulum
In the first case we want to determine when “rigid body” motions can have important effects on the flexible motions. Consider the “sprung” pendulum which is free to rotate or oscillate about the origin in the x, y (or r, 8 ) plane, but which also contains a radial spring of linear stiffness k (Figure 1). We will refer to the angular motion as the “rigid body” motion and the radial motion as the “flexible” motion. Proceeding through the usual process14 1 of the inertial coordinates, inertial velocities, virtual displacements, kinetic energy, potential energies (due to stiffness and gravity), the Lagrangian is:
L=$m(f2 +r2fj2 )-$k(r-r,)2 -ma(rsinB-Yx)
From Iagrange’s equations the radial differential equations is:
We also can obtain the angular equation, but we can always interpret it as the angular force required to produce the stipulated motions.
3.1 Rotation at Constant Awular Velocitv

6-3
In the first cake we stipulate that the pendulum moves through a completc circular motion at a constant angular velocity of u) . Then 8 = & , and the radial differential equation is:
I ( ?+ U)()-a, 2 2r=I;, 1 x + irk - gsinull I
Regardless of the radial force, the radial response acts as if the natural frequency in the radial direction was
3.2 Simale Harmonic Rotation
In the second case we stipulate that the pcndulurn oscillates through an amplitude 80 with a constant
frequency w Then 8 = 80 Sin ~0t , and the radial
differential equation is:
1. + [u$ - $(I + cos2ub)~r = 2 + u,;;r-
‘I’he complete solution of the radial equation depends on the l,EIS, KFIS and initial conditions. The LEIS can be convcrtcd, with a change of variables,
to the classical Math&s equation.
I-” + (II - 2bcos2z)r = 0
Mathicu’s equation applies to the vibrations of spinning satellites, buckling of beams with periodic end forccs, the saturation of loudspeakers, tides in circular bodies of water and many other problems. In our application, if the radial force does not depend on r then the stabilitv of
the solutions dcpcnds only on the frequency ratio z
and the angular amplitude 80
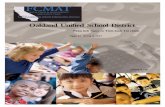
Intuitively, one would expect that the effects on stability would be small unless the ,angular amplitude is large or the frequency ratio is near 1. l;@re 2 (from
MCI ;ichlan’ 7 ‘) s h ows the classicA plot of the regions of stability/instability for periodic solutions of Mathicu’s equation. Regions of instability are shown to bc emanating from the points
z - $# = 1, 22,32, . . . n2
So a question becomes - what practical values OS a, b put. the solutions into the stable or unstable regions. For instance, in the neighborhood of a= I, we can USC Mel ;ichlan’s[ 7 1 boundaries to obtain a region for instability for small b. 1Ggurc 3 shows the lower and
upper bounds of the narrow unstable region for frqucncy ratios near 1 and for angular amplitudes up to IO degrees. The instability range continues to widen for higher values of the angular amplitude. For frequency ratios near 2,3,4,..., the instability ranges exist, but over ever narrower ranges of angular amplitude.
We also can integrate the equation numerically. tigure 4 shows typical time histories for a frquency ratio of 1. I, damping of 0.02 and amplitudes of 053,054 and 0.55 radians. ‘I’he solutions are stable for 053 radians and unstable for 0.54 and 0.55 radians. Figure 5 gives a general pattc7n for the smallest amplitudes to produce instability for damping of 0.02 and frequency ratios up to 2.
In summary, the problem of the “sprung” pendulum shows that rigid body motions czm affect the flexible motions:
a. Constant angular velocity reduces the “effective” radial natural frequency;
b. Forced sinusoidal angular motion can produce radial instability near integer values of the frequency ratio as the an~tiar amplitudes grow large.
4. Tvuical section Airfoil on au Accelerating. Rotatiw FuselaPe
‘I’hc second case is a problem that is closer to practical interest - a typical section airfoil on an accelerating, rotating fuselage. We will apply lagrange’s equations in inertial ctxmlinates, then transform the equations to noninertial, body - fixed coordinates for solution. We want to show when rigid body rotations and longitudinal accelerations must be included in the flexibility equations.
Consider a slcndcr airfoil which is mounted on a slender fuselage. (ligure 6). The fuselage has inertial coordinates X0 = 41, qj = 42 and pitch angle
8 = 43. The airfoil is located at fuselage position
x = xw and has its own degrees of freedom in vctical
translation h = 44 and rotation 6 = 4s.
4.1 Eauations of Motion
l;or a general point on the slender fuselage and airfoil the inertial coordinates are:
FuselageX = 41 + XC3 Y = 92 + X4
x = 41 +x&-3 - 44s3 + EC35 Airfoil
Y = 42 + X&3 + 44C3 + B3.5

6-4
I’rocecding through the usual process of the inertial coordinates, inertial velocities, virtual displacements, kin&c and potential tncrgies (due to stiffness and gravity) and the Iagran&n for the complete fusclagelairfoil system, we establish the complete nonlinear equations in inertial coordinates. ‘Ihtn, it is more convenient to actually solve the problem in a body - fixed coordinate system. So we define the “apparent” body - fixed components of the vehicle’s velocities and accelerations by
4.x = 41c3 + Y2s3 ‘&I = 42c3 - Cal?3
ii, = &Cj + Q2S3 ‘iy = G2c3 - q13
WC simplify further by dropping second order terms in 94, qs to obtain the linean& equations in terms of
nonincrtml , body - fixed coordinates.
m, = 5
dm
wing
SW = Jljdm
wing
I, = s
lj2dm
wing
Ii?33 = If + I, + m+p; + 2&!&x,
M34 = m,x, + SW
M35 = I, + s,x,
M45 = SW
M334 = mwq4 + SW95
a335 = sw(q4 - xw95)
M43s = SW%
iiy3=Sf+xwmw+S,
4.2 Seuarate Rigid and Flexible Eauations - Bodv Coordinates
‘I’hc total solution requires the solution of the five coupled equations. It can be convenient to scparatc the complete q&ions into scparatc rigid equations and flexible equations. If WC separate the purely rigid body terms, coupling terms and purely flexible terms - the linear&d flexibility equations, in body - fixed coordinates, (with damping added) arc :
4.3 Vibration Solutions
Immediately we can see hints of the effects of the pitch
rate s3 and the acceleration along the body axis @, as they alter the “effective stiffness“ in the flexibility
equation. Assuming 43, I& are constants, figures 7 and 8 show the effects of aircraft pitch rate on the coupled (unbahutce not equal zero) airfoil frequencies of translation and rotation for the airfoil slightly aft and slight forward (1 chord) of the aircraft axis.
In the case of the unbalance equal zero, the vibration equations arc uncoupled and the translation mode just acts as if the “effective” stiffness is
k4& =k4-m,&=k4
In the cast where the 43 = 0 but the unbalance is not zero, the equations remain coupled, but the torsion equation acts with an “effective” stiffness
Whether the effective torsional stiffness is slightly larger or smaller depends on the sign of the unbalance and whether the aircraft is auxlcrating or decelerating.
4.4 -1 Eauations
We use (for convenience) hypersonic aerodynamics from piston theory’ ’ I, to obtain the hypersonic flexibility
where the nondimensional variables are defined by:

6-5
lengths c=ehonl l=span
positionslcoordinatesXX, = CXL *
& = c&e
q4=44 9x =4x qy=Gy
dampings
c4 = 2Qco454 c5 = 2m,c2F5555
time and frequency
time derivative
air density and gravity
aerodynamic coefficients
Geometry integrals
4 = & 0.5 i$ = g -5;1, +0.333...
As usual, the damping is modifiied with the aerodynamic damping and the stiffness is modified with the aerodynamic stiffness. However, the stiffness also has terms that are proportional to the nondimensional pitch
rate Yi and the nondimensional acceleration 4:
4.5 Rieid Bodv Motions as Constant Parameters in the Aeroelastic Eauations
Now again consider the pitch rate and the aircraft acceleration as constaut parameters. From the differential equation and the vibration solutions, we know that the rigid body pitch rate wiJ decrease the
bending frequency (even if only slightly), and that the rigid body acceleration (or deceleration) along the body axis cilfl increase or decrease the torsional frequency.
Therefore those rigid body motions also can alter tbc aircraft speeds for acroelastic divergence and flutter. 1 ;or example, under the assumed conditions we can obtain an approximate expression for the p required for acroelastic divergence:
which shows the importance on the divergence speed of: a. c , the ratio of the pitch rate to the
uncoupled translation frequency;
b. 4: - , the relationship of the acceleration to +w
the torsional frequency and the radius of gyration c. 4, the ratio of the uncoupled translation and
rotation frequencies
d. %, the relationship of the unbalance to the rw
radius of gyration.
We also can use the hypersonic aeroelastic equation to do an eigenvalue calculation (dropping the KI IS) to obtain flutter solutions. Figures 9 and 10 show representative effects of pitch rate and acceleration on hypersonic divergence and flutter boundaries.
4.6 Forced Rigid Bodv Motions in the Geroelastic
J&her than assume that the rigid body motions are constant parameters, we can assume representative forms for their time dependent motions and then plug them into the flexible equations of motion. We need the
terms (x, (i3, &, ii,, iiY and 43. TYollowing
I;,t~n’s19J notation we can assume the time dependent forms for the oscillatory, damped speed, pitch angle and angle of attack, wherein each expression the terms a and b are assumed eonstants:
4, = u() + E(U,S] + b,C])
8 = q-j = 80 + E(a@s, + b&J
a = a0 + E(ff& + b*C])
Where
s, = sinnCO,bt c,, = Cosnu),bt i? =e-@bSrhi
Orb = assumed “rigid body” frequency
Srb = assumed ” rigid body” damping
Noting that 4Y m &a and combining angles where
possible, we obtain the “forcing terms” to be included

6-6
.2 . in the quations of motion. ‘lhc lcrms 6’3 7 9x app~~rr on the Ll LS of the equation and influence stability:
;i, = (orhE ‘t;i,S, + b;i, C,
‘Ihe major noint is that terms S, = sin ;Irr~,~t& C2 = cos 2m& on the Id IS introduce behavior like that of Mathieu’s eouation.
5. The General Case - Three Dimensional Motion of a Flexible Vehicle
5.1 Geometrv
We start with an inertial X, Y, 2 coordinate system and a nonincrtiaf X, y, z system that can accelerate and
rotate in the X, Y, Z system (Figure 11). The origin of the X, y, z is located in the incrtiaf system at:
X = X0 = 91 Y = Y(j = 92 2 = 3) = 93
‘lhe orientation of the X, y, z system is given by the conventional sequence of 13&r rotations:
?I=94 O=Ys 4=9fs
5.2 Inertial Coordinates
‘then intztial coordinates of a gcncral point in x, y, z tll-C:
{x,y,z} = (ql&2,%} +[+&z}
whae [z I, the L iulcr transformation 19’, is the product of three transformations that depend on the 1 iulcr angles:
bl = [t4 I+c]
b-4 -s4 01 [c5 0 es1 [l 0 01
01 [Tj]’ I 0 I 01 [qj]=lo C6 -sbl L-ss 0 SJ lo % c6 1
We also write the “local” coordinates in terms of additional generalized coordinates 47,yg.. . 4,r :
{X,Y,Z} = ~{%YiiZi}4iW i=7
to obtain the inertial coordinates in terms of the generalized coordinates:
WA= {Yl,qz43}+&*, .?%Zi)yi(4 i=7
‘I’hc kinetic energy, in terms of the inertial coordinates is a lengthy expression which shows why it can bc useful to use Olscn’sl 6 1 form of the quations of motion (which doesn’t rquirc the kin&c energy), rather than Whittaker’s[5 1 form which does require the kin& energy.
5.3. Overcomine the Tedious AsDects - Ouasi Coordinates
Again, we could USC I agrange’s equations on the Lagrangian in inertial coordinates to obtain the equations of motion for the flexible system. We would be accurately accounting for all of the inertia couplings that arise from the fact that the nonincrtial x, y, z system is accelerating and rotating in the inertial X, Y, % system. WC could solve the problem in terms of the inertial translations 91,*, C& and the l&r angles
~74, ys , q6 and then transform the rcsul ts to the
translations along the body axes qx, q,,, qz and the
instantaneous angnlar velocities or,, (1) y, frr z, using
the transformations:
{4x7 4y79z} = [dT{41 7927 93)
‘I’hc approach is correct in principal. IIowcver, it works easiest for special cases like rotation about one axis (where the time derivative of the appropriate IGuler angle is indeed the angular velocity). IIowever, il suffers from two shortcomings in the general case of three dimensional motions.
m, the gcncrali~cd coordinates 41, a, a
are the translations in the directions of the inertial coordinates. We would like to replace them with the translations in directions of the noninertial, body - axis
cmdhiks yx, qrI) yz.
Second, the gcncralizcd coordinates 44,45,45
are the 1 iuler angles. Their time derivatives 44,ks, is
may not be the physical angular velocities of the x, y, z system for general motions. We would like to rcplacc tha with the physical angnlar velocities of the noninertial, body - axis coordinates, or,, ory, [nz.

6-7
I Iowcvcr, a much more clcgant and simple method is available, the method of quasi - coordinates due to Tfamcl~ 1 o 1 and ISoltzmamrl L 1 1. ‘Ihc term “quasi -. coordinates” refers to the fact that WC cannot (in the gcncral case of three dimensional motions) directly intcgratc the angular vdocitics to get the gcnemlized coordinates. Actually all we are doing is performing the transformations bcforc we apply Lagrange’s equations to obtain the differential equations, rather- than after we get them.
WhittakcJ 5 1 and Mcirovitchl 1 2 1 explain the method of quasi - coordinates for the special case of rotational motions. Several others, among them Nayfch and Mookl * 31, give applications.
‘[‘he basic idea is that we want to write Lagrange’s equations in a form that treats dircetly the body axis translations yx, yy, yz and the true angular velocities
w,, u+ CDz. We start with the usual form of
I ngrange’s equations in terms of the original, indepcndcnt gcncrali~ed coordinates 41, @ . . . qn and
their time dcrivativcs 41,212.. . bn :
$($?)-($)=a ‘l-he 1 .agrangim cilfl bc written in the usual form in the original inertial coordinates:
wc - ()b&n the ctyuivalent form of the I ~grangian in the quasi - ccx&nates:
Then, following WhittakcJ51 WC can obtain the equations for:
Rotation IX)Fs:
Flcxiblc 1xX% remain the same (execpt that we must
USC the modified I .agrangian L)
These are the eauations of motion in terms of auasi - coordinates. Thev are the fundamental advance which allows us to formulate a unified set of eauations that can be used without simnlification for the aerodvnamics. structures and stabilitv and control of flexible aircraft - thev allow us to place the aeroelastic nroblem into a coordinate svstem and notation that is used in flipht mechanics and stabilitv and control.
5.4 Eneraies - Noninertial Bodv - Axis Coordinates
‘I‘ranslation DOFs:

6-8
where typical inertia integrals arc:
M= dm S body
Ixy = J&m = 2 b% Yjdm)4iqj = 2 ‘xiyj YiSj
body if i,j
Iiy = J.iydm = 2 (rx~ujdm)Qiq~ = 1 Ixiy, 4iqj
body i,j i,j
The potcmtial energy due to gravity will come from our gravitational model. In the case of a “flat e&h”:
v = -g J(“- z&m R mass
We expect the potential energy due to flexibility to be of the form
Vf =$i ~vb~4ry/ i= 7j=7
Or perhaps a more general expression for larger deflections
i=7j=7 i=7 j=7k-7
The author has performed those operations, and the complete set of differential equations is available (but too lengthy to present here).
5.6 SimDlification to the “Flat” AirDlane
If we speciali~fi the general body to consider an essentially “flat” surface in the xy plane (Kight handed xyz coordinate system attached to the body), Figure 12, and make the usual definitions
4, = U velocity along the x axis
4, = V vclwi ty along the y axis
4, = W velocity along the z axis
wX = P angular velocity about the x axis
my = Q angular velocity about the y axis
mz = R angular v&city about the Y. axis
i
The equations of motion become
Translation
Rotation
Flexible
(I@ + VP - UQ)Szi - (e - PR)Sxzi + (p + QR)Syi
The equations above are the equations to solve for the static and dynamic response and stability of a flexible, “flat” aircraft under steady state flight or in accclemtions and maneuvers. They are nonlinear and mutually couple the overall rigid body motions with the flexible deflections. They can be used for analyses of aircraft performance, stability and control, flight loads, control effectiveness and acroelastic divergence and flutter. Of course they are more complicated than the conventional nonlinear equations for rigid body motions or the linear equations for atroelastic response (which are coupled to the rigid body equations only through the aerodynamics).
5.7 Perfect Masses and Modes In the special case of
a. Mass symmetry about the y axis

6-9
b. Origin al the center of mass c. Pcrfwtly orthogonal free - free modes
the equations of motion simplify further to the usual r&id body equations and the modified flexible equations:
i iJ v
I w
Translation
1-I
WQ-VR
+ UR-WP
1 1 VP- UQ
Rotation
[PI [ QR
Flexible
WherC
ti)i = natural frequency of the perfect i th mode
If we assume, for the moment, that the angular velocities P and Q are constant, then one approximation would bc to treat the flexible equations as if the effective structural frequency for any mode is just replaced by
2 Ui -cr)i ?-(?+Q2)
On the other hand, since P and Q will be functions of time, the actual behavior will be more like the behavior of solutions to Mathieu’s equations.
Many recent developments mrmerically integrate the linearized equations of motion with nonlinear aerodynamics on the RFIS. It seems that, once the analyst has committed to numerical integration of the equations of motion, there is very little additional labor (or computational time) to use the more comprehensive equations of motion above.
6. Summarv. Conclusions
1. Whittaker’s and Olsen’s expressions can be useful to formulate the equations of motion for complicated geometries with many degrees of Freedom.
2. The “sprung pendulum” shows that a rigid body motion with constant angular velocity can reduce the “effective” natural frequencies. I Jsing the resemblance to Mathieu’s equation, we have seen that there is a
coupling mechanism between the rigid body and flexible motions, even in the absence of aerodynamics. It appears that if a flexible frequency is up to 1.3 - 1.5 times a rigid body frequency, then those coupling effects should be considered. In some casts (“slender” aircraft) the natural frequencies may already be in those ranges. In other cases (the X - 29) the aerodynamic forces drive some of the flexible frequencies down toward the rigid body frequczies.
3. ‘l’he airfoil on an accelerating/rotating fuselage shows that the effective bending stiffness is reduced by a constant pitch rate. It also shows that torsional stiffness is increased or decreased by constant acceleration/deceleration, depending on the sign of the unbalance. The results modify the divergence and flutter speeds. If WC impose the rigid body motions as forced, sinusoidal, damped motions - then terms appear in the differential equations which can produce additional instabilities, such as in Matbieu’s equation.
4. In the case of general motion of a flexible body, the combination of energy methods and quasi - coordinates can produce a practical se1 of equations that govern the aerodynamics, flight mechanics and structures problems of flexible aircraft. They allow the determination of the effects of structural flexibility on aircraft performance, stability and air loads and the effects of the “rigid body“ motions on aeroelastic control - effectiveness, divergence and flutter.
5. For the special case of the “flat airplane” with perfect mass distribution and perfect modes, a simple preliminary estimate of the effects of rigid body motions on flexible motions would be to replace all of the structural frequencies by:
m + I m q\
7. References
1. A. K. Dusto, et al; “A Method for Predicting the Stability Characteristics of Control Configured ligures”; AF+l>I. ‘1’1~ 74 - 91; 1974.
2. Ii. C. Bekir, et al; “Modeling Flexible Aircraft for Hight Control Design”; AEWAL, ‘I’K 88 - 3089; 1989.
3. M. R Waszak and D. K. Schmidt; “Flight Dynamics of Aeroelastic Vehicles”, AIAA Journal of Aircraft, Volume 25, Number 6, June 1988.
4. R. L. Bisplinghoff, II. Ashley and R. L. Halfman; Aeroelasticity; Addison - Wesley; Reading, Mass; 1955; (Se&ion 3 - 8. Energy Methods).
5. 1 I. T. Whittaker; A Treatise on the Analytical Dynamics of Particles and Rigid Bodies; Dover Publications; New York; 1944; (Section 28. The

6-10
Explicit Form of Lagrange’s equations; Section 30. The Lagrange’s equations for Quasi - Coordinates).
6. J. J. Olson; “Coupled Plight Mechanics and .4eroelasticity - Some Effects of Aircraft Maneuvers on Aeroelastic Divergence and Flutter”; 19m ICAS Congress; Los Angeles; 1994.
7. N. W. McLachlan; Theory and Application of Mathieu Functions; Oxford Press; London; 1947.
8. H. Ashley and G. Zartarian; “Piston Theory, A New Aerofynamic Tool for the Aeroelastician”; J. Aero. SC.; Vol 23; No. 6; June 1958.
9. B. Etkin; Dynamics of Plight, Stability and Control; Wiley; ,New York; 1959 (Section 4.5. Orientation and Position of the Airplane).
m
10. A. Hamel; Zeitschrift fur Mathematiks und Physiks; 1904.
Figure 1. The Sprung Pendulum
11. R. Holtzmann; Sitzungsberichte; Wien; 1902
12. L. Meirovitch; Methods of A4nalyt.ical Dynamics; LLlcGraw - Hill; New York; 1970; (Section -I. 12. The Lagrange’s equations for Quasi - Coordinates).
13. A. FL Nayfeh and I>. 7’. &Look; Nonlinear Oscillations; Wiley; New York; 1979; (Section 61.3 A Restricted Ship hfotion).
d
Figure 2. Regions of Stability/Instability for Periodic Solutions of Mathieu’s Equation
0 2 ‘ e 8 (0
*mplibr4 -
Figure 3. Instability Region for Frequency Ratios near 1

6-11
Figure 4. Tie Histories for Frequency ratio 1.1
4.00
3.50
j 3.00
I I; 2.50
; 2.00
': g 1.50
E" < 1.00
0.50
0.00
I
.; ..,” ;‘.,.;. .;. .,. .;. .,..,.‘; .;. .;.; “,.‘; .;. . :1111!!: !::!l:llli
-~~-~-~~-~-~-~~--~-~-?-~-~--~-~-I~ .+J..g..j .i.i. i. J..i,j ..j. .~.+a?j. .I
iiiiiiIiiiiiiii.ii .;.+.;++ .;.; .;. j..‘i-i.f.y-;
:::::“I.. l * $
: j. .i
1.11.110
-j-f--~-j-f - I - + - ; - - f - ; - ( - f + 1 :f++i Ii I iI;; I : : I : g-.i-i.i..i . ..~..-..-C...~......C-,.~.
ddddooooo.-.-.-.-----.-.-
Frequency Ratio
Figure 5. Smallest value of Amplitude to Become Unstable
Figure 6. Airfoil on an Accelerating, Rotating Fuselage
Figure 7. The Effects of pitch Rate on Natural Frequencies, *
xw = -1.0
I Effects oi Pitoh R.t. on N.tur.l Fnqu.noi.s. Airfoil Fwd
Figure 8. The Effects of Pitch Rate on Natural Frequencies,
Figure 9. The Effects of Pitch Rate on Hypersonic Divergence and Flutter
a.* a* 4.2 0 02 0.4 0.6 -
Figure 10. The Effects of Acceleration on Hypersonic Divergence and Flutter

6-12
Figure 11. General Motion of a Flexihle Vehicle
Z
Figure 12. The “Flat”Airplane