Time-frequency based channel estimation for high-mobility OFDM systems—Part II: Cooperative...
9
Hindawi Publishing Corporation EURASIP Journal on Advances in Signal Processing Volume 2010, Article ID 549197, 8 pages doi:10.1155/2010/549197 Research Article Time-Frequency Based Channel Estimation for High-Mobility OFDM Systems–Part I: MIMO Case Erol ¨ Onen, 1 Aydın Akan (EURASIP Member), 1 and Luis F. Chaparro (EURASIP Member) 2 1 Department of Electrical and Electronics Engineering, Istanbul University, Avcilar, 34320 Istanbul, Turkey 2 Department of Electrical and Computer Engineering, University of Pittsburgh, Pittsburgh, PA 15261, USA Correspondence should be addressed to Aydın Akan, [email protected] Received 1 February 2010; Accepted 14 May 2010 Academic Editor: Lutfiye Durak Copyright © 2010 Erol ¨ Onen et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Multiple-input multiple-output (MIMO) systems hold the potential to drastically improve the spectral efficiency and link reliability in future wireless communications systems. A particularly promising candidate for next-generation fixed and mobile wireless systems is the combination of MIMO technology with Orthogonal Frequency Division Multiplexing (OFDM). OFDM has become the standard method because of its advantages over single carrier modulation schemes on multipath, frequency selective fading channels. Doppler frequency shifts are expected in fast-moving environments, causing the channel to vary in time, that degrades the performance of OFDM systems. In this paper, we present a time-varying channel modeling and estimation method based on the Discrete Evolutionary Transform to obtain a complete characterization of MIMO-OFDM channels. Performance of the proposed method is evaluated and compared on different levels of channel noise and Doppler frequency shifts. 1. Introduction The major challenges in future wireless communications systems are increased spectral efficiency and improved link reliability. The wireless channel constitutes a hostile propaga- tion medium, which suffers from fading (caused by destruc- tive addition of multipath components) and interference from other users. Diversity provides the receiver with several (ideally independent) replicas of the transmitted signal and is therefore a powerful means to combat fading and inter- ference and thereby improve link reliability. Common forms of diversity are space-time diversity [1] and space-frequency diversity [2]. In recent years the use of spatial (or antenna) diversity has become very popular, which is mostly due to the fact that it can be provided without loss in spectral efficiency. Receive diversity, that is, the use of multiple antennas on the receiver side of a wireless link, is a well-studied subject [3]. Driven by mobile wireless applications, where it is difficult to deploy multiple antennas in the handset, the use of multiple antennas on the transmitter side combined with signal processing and coding has become known under the name of space-time coding [4] and is currently an active area of research. The use of multiple antennas at both ends of a wireless link (multiple-input multiple-output (MIMO) technology) has been demonstrated to have the potential of achieving extraordinary data rates [5]. The corresponding technology is known as spatial multiplexing [6] or BLAST [7] and yields an impressive increase in spectral efficiency. Most of the previous work in the area of MIMO wireless has been restricted to narrow-band sys- tems. Besides spatial diversity broadband MIMO channels, however, offer to higher capacity and frequency diversity due to delay spread. Orthogonal frequency division multi- plexing (OFDM) significantly reduces receiver complexity in wireless broadband systems. The use of MIMO technology in combination with OFDM, that is, MIMO-OFDM [6], therefore seems to be an attractive solution for future broadband wireless systems [8, 9]. However, intercarrier interference (ICI) due to Doppler shifts, phase offset, local oscillator frequency shifts, and multi-path fading severely degrades the performance of OFDM systems [10]. Most of the channel estimation methods assume a linear time- invariant model for the channel, which is not valid for the next-generation, fast-moving environments [11]. Recently
Transcript of Time-frequency based channel estimation for high-mobility OFDM systems—Part II: Cooperative...

Hindawi Publishing CorporationEURASIP Journal on Advances in Signal ProcessingVolume 2010, Article ID 549197, 8 pagesdoi:10.1155/2010/549197
Research Article
Time-Frequency Based Channel Estimation forHigh-Mobility OFDM Systems–Part I: MIMO Case
Erol Onen,1 Aydın Akan (EURASIP Member),1 and Luis F. Chaparro (EURASIP Member)2
1 Department of Electrical and Electronics Engineering, Istanbul University, Avcilar, 34320 Istanbul, Turkey2 Department of Electrical and Computer Engineering, University of Pittsburgh, Pittsburgh, PA 15261, USA
Correspondence should be addressed to Aydın Akan, [email protected]
Received 1 February 2010; Accepted 14 May 2010
Academic Editor: Lutfiye Durak
Copyright © 2010 Erol Onen et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Multiple-input multiple-output (MIMO) systems hold the potential to drastically improve the spectral efficiency and linkreliability in future wireless communications systems. A particularly promising candidate for next-generation fixed and mobilewireless systems is the combination of MIMO technology with Orthogonal Frequency Division Multiplexing (OFDM). OFDM hasbecome the standard method because of its advantages over single carrier modulation schemes on multipath, frequency selectivefading channels. Doppler frequency shifts are expected in fast-moving environments, causing the channel to vary in time, thatdegrades the performance of OFDM systems. In this paper, we present a time-varying channel modeling and estimation methodbased on the Discrete Evolutionary Transform to obtain a complete characterization of MIMO-OFDM channels. Performance ofthe proposed method is evaluated and compared on different levels of channel noise and Doppler frequency shifts.
1. Introduction
The major challenges in future wireless communicationssystems are increased spectral efficiency and improved linkreliability. The wireless channel constitutes a hostile propaga-tion medium, which suffers from fading (caused by destruc-tive addition of multipath components) and interferencefrom other users. Diversity provides the receiver with several(ideally independent) replicas of the transmitted signal andis therefore a powerful means to combat fading and inter-ference and thereby improve link reliability. Common formsof diversity are space-time diversity [1] and space-frequencydiversity [2]. In recent years the use of spatial (or antenna)diversity has become very popular, which is mostly due to thefact that it can be provided without loss in spectral efficiency.Receive diversity, that is, the use of multiple antennas onthe receiver side of a wireless link, is a well-studied subject[3]. Driven by mobile wireless applications, where it isdifficult to deploy multiple antennas in the handset, theuse of multiple antennas on the transmitter side combinedwith signal processing and coding has become known underthe name of space-time coding [4] and is currently an
active area of research. The use of multiple antennas atboth ends of a wireless link (multiple-input multiple-output(MIMO) technology) has been demonstrated to have thepotential of achieving extraordinary data rates [5]. Thecorresponding technology is known as spatial multiplexing[6] or BLAST [7] and yields an impressive increase inspectral efficiency. Most of the previous work in the areaof MIMO wireless has been restricted to narrow-band sys-tems. Besides spatial diversity broadband MIMO channels,however, offer to higher capacity and frequency diversitydue to delay spread. Orthogonal frequency division multi-plexing (OFDM) significantly reduces receiver complexity inwireless broadband systems. The use of MIMO technologyin combination with OFDM, that is, MIMO-OFDM [6],therefore seems to be an attractive solution for futurebroadband wireless systems [8, 9]. However, intercarrierinterference (ICI) due to Doppler shifts, phase offset, localoscillator frequency shifts, and multi-path fading severelydegrades the performance of OFDM systems [10]. Mostof the channel estimation methods assume a linear time-invariant model for the channel, which is not valid for thenext-generation, fast-moving environments [11]. Recently

2 EURASIP Journal on Advances in Signal Processing
a time-frequency varying MIMO-OFDM channel estimationapproach is presented where discrete prolate spheroidalsequences are used to obtain a robust time-varying channelestimator that does not require any channel statistics [12].A time-varying model of the channel can be obtained byemploying time-frequency representation methods. Here wepresent a time-varying MIMO-OFDM channel estimationbased on the discrete evolutionary representation of thechannel output. The Discrete Evolutionary Transform (DET)[13] provides a time-frequency representation of the receivedsignal by means of which the spreading function of the multi-path, fading, and frequency selective channel can be modeledand estimated.
The rest of the paper is organized as follows. InSection 2, we give a brief summary of the wireless parametricchannel model used in our approach and the MIMO-OFDM communication system. Section 3 presents time-varying modeling and estimation of MIMO-OFDM channelsvia DET. A time-frequency receiver is also given in Section 3for the detection of data symbols using estimated channelparameters. In Section 4, we give some simulation resultsto illustrate the performance of our algorithm for differentlevels of channel noise and Doppler frequency-shifts andcompare with other existing methods. Conclusions aredrawn in Section 5.
2. MIMO-OFDM System Model
In this section we give a brief introduction to the time-varying, parametric communication channel model used inour work and the MIMO-OFDM signal model.
2.1. Parametric Channel Model. In wireless communications,the multi-path, fading channel with Doppler frequency-shifts may be modeled as a linear time-varying system withthe following impulse response [14–16]:
h(t, τ) =Lp−1∑
p=0
γp(t)δ(τ − τp
), (1)
where γp(t) are independent Gaussian processes with zeromean and σ2
p variance, {τp} are delay profiles describing thechannel dispersion with τmax as the maximum delay, and Lpis the total number of paths. The variance σ2
p is a measure ofthe average signal power received at path p, characterized bythe relative attenuation of that path, αp. Assuming that thesampling frequency is high enough, so the delays are integermultiples of the sampling interval, a discrete-time channelmodel can be obtained as [15, 17]
h(m, �) =Lp−1∑
p=0
αpejψpmδ
(� −Np
), (2)
where m is the time index, ψp represents the Dopplerfrequency-shift, αp is the relative attenuation, and Np is thedelay in path p. The Doppler frequency shift ψ, on the carrier
frequencyωc, is caused by an object with radial velocity υ andcan be approximated by [15]
ψ ∼= υ
cωc, (3)
where c is the speed of light in the transmission medium. Inthe new generation wireless mobile communication systems,with fast moving objects and high carrier frequencies,Doppler frequency-shifts become significant and have to betaken into consideration. The channel parameters cannotbe easily estimated from the impulse response; however theestimation problem can be solved in the time-frequencydomain by means of the so called spreading function.
The spreading function is related to the generalizedtransfer function and the bifrequency function. The gener-alized transfer function of the linear, time-varying channel isobtained by taking the DFT of h(m, �) with respect to �, thatis,
H(m,ωk) =Lp−1∑
p=0
αpejψpme− jωkNp , (4)
where ωk = (2π/K)k, k = 0, 1, . . . ,K − 1. Now, the channelbi-frequency function is found by computing the DFT ofH(m,ωk) with respect to time variable, m:
B(Ωs,ωk) =Lp−1∑
p=0
αpe− jωkNpδ
(Ωs − ψp
), (5)
where Ωs = (2π/N)s, s = 0, 1, . . . ,N − 1. Calculating theinverse DFT of B(Ωs,ωk) with respect to ωk (or by takingthe DFT of h(m, �) in (2) with respect to m), we have thespreading function of the channel as
S(Ωs, k) =Lp−1∑
p=0
αpδ(Ωs − ψp
)δ(k −Np
)(6)
provided that the Doppler frequency shifts are integer multi-ples of the frequency sampling interval Ωs. S(Ωs, k) displayspeaks located at the time-frequency positions determined bythe delays and the corresponding Doppler frequencies, withαp as their amplitudes [17]. In our approach, we extractthis information from the spreading function of the receivedsignal and then detect the transmitted data symbol.
2.2. MIMO-OFDM Signal Model. In an OFDM communi-cation system, the available bandwidth Bd is divided intoK subchannels. The input data is also divided into K-bitparallel bit streams and then mapped onto some transmitsymbols Xn,k drawn from an arbitrary constellation pointswhere n is the time index, and k = 0, 1, . . . ,K − 1, denotesthe frequency or subcarrier index.
Some pilot symbols are inserted at some preassignedpositions (n′, k′), known to the receiver: (n′, k′) ∈ P ={(n′, k′) | n′ ∈ Z, k′ = iS + (n′ mod (S)), i ∈ [0,P − 1]},where P is the number of pilots, and the integer S = K/Pis the distance between adjacent pilots in an OFDM symbol

EURASIP Journal on Advances in Signal Processing 3
[10]. The nth OFDM symbol sn(m) is obtained by taking K-point inverse DFT and then adding a cyclic prefix (CP) oflength LCP where LCP is chosen such that L ≤ LCP + 1, and Lis the time-support of the channel impulse response. This isdone to mitigate the effects of intersymbol interference (ISI)caused by the channel dispersion in time.
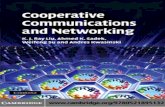
A MIMO-OFDM system with Ntx transmit and Nrx
receive antennas is depicted in Figure 1. The incoming bits
are modulated to form X (i)n,k, where i is the transmit antenna
index. After parallel-to-serial (P/S) conversion, the signaltransmitted by the ith antenna becomes
s(i)n (m) = 1√K
K−1∑
k=0
X (i)n,ke
jωkm, (7)
where m = −LCP,−LCP + 1, . . . , 0, . . . ,K − 1, ωk = (2π/K)k,and each OFDM symbol is N = K + LCP sample long. Thechannel output suffers from multi-path propagation, fadingand Doppler frequency shifts:
y( j)n (m) =
Ntx∑
i=1
⎛⎜⎝L
(i, j)p −1∑
�=0
h(i, j)(m, �) s(i)n (m− �)
⎞⎟⎠
=Ntx∑
i=1
⎛⎜⎝L
(i, j)p −1∑
p=0
α(i, j)p e jψ
(i, j)p m s(i)n
(m−N (i, j)
p
)⎞⎟⎠
=Ntx∑
i=1
⎛⎜⎝
1√K
K−1∑
k=0
X (i)n,k
L(i, j)p −1∑
p=0
α(i, j)p e jψ
(i, j)p me jωk(m−N (i, j)
p )
⎞⎟⎠
=Ntx∑
i=1
⎛⎝ 1√
K
K−1∑
k=0
H(i, j)n (m,ωk) e jωkm X (i)
n,k
⎞⎠,
(8)
where (·)( j) denotes the jth receiver. (·)(i, j) is indexing for thewireless time-varying channel between the ith transmitterand the jth receiver antennas. The transmit signal is alsocorrupted by additive white Gaussian noise η( j)(m) over thechannel. The received signal for the nth frame can then be
written as r( j)n (m) = y
( j)n (m) + η
( j)n (m). The receiver discards
the Cyclic Prefix and demodulates the signal using a K-pointDFT as
R( j)n,k =
1√K
K−1∑
m=0
[y
( j)n (m) + η
( j)n (m)
]e− jωkm
=Ntx∑
i=1
⎛⎜⎝
1√K
K−1∑
s=0
X (i)n,s
L(i, j)p −1∑
p=0
α(i, j)p e jωs(m−N
(i, j)p )
×K−1∑
m=0
e jψ(i, j)p m e j(ωs−ωk)m +N
( j)n,k
⎞⎠,
(9)
where N( j)n,k is the Fourier transform of the channel noise
at the jth receiver. If the Doppler effects in all the channel
paths are negligible, ψ(i, j)p = 0, for all i, j, then the channel
is almost time-invariant within one OFDM symbol. In thatcase, above equation becomes
R( j)n,k =
Ntx∑
i=1
X (i)n,k
L(i, j)p −1∑
p=0
α(i, j)p e− jωkN
(i, j)p +N
( j)n,k
=Ntx∑
i=1
H(i, j)n,k X (i)
n,k +N( j)n,k ,
(10)
whereH(i, j)n,k is the frequency response of the channel between
the ith transmitter and jth receiver antenna, and if there arelarge Doppler frequency shifts in the channel, then the time-invariance assumption above is no longer valid. Here weconsider modeling and estimation of the channels frequency
responses H(i, j)n,k and approach the problem from a time-
frequency point of view [17].
3. Time-Varying Channel Estimationfor MIMO-OFDM Systems
In this section we present a time-frequency procedure tocharacterize time-varying MIMO-OFDM channels. We alsopropose a time-frequency receiver that uses the estimatedchannel fading, delay, and Doppler parameters to recoverthe transmitted symbols. In the following, we briefly presentthe Discrete Evolutionary Transform (DET) as a tool forthe time-frequency representation of time-varying MIMO-OFDM channels.
3.1. The Discrete Evolutionary Transform. Wold-Cramer rep-resentation [18] of a nonstationary random signal γ(n) canbe expressed as an infinite sum of sinusoids with random andtime-varying amplitudes and phases, or
γ(n) =∫ π
−πΓ(n,ω)e jωndZ(ω), (11)
where Z(ω) is considered a random process with orthogonalincrements. This is a generalization of the spectral rep-resentation of stationary processes. Priestley’s evolutionaryspectrum [18, 19] of γ(n) is given as the magnitudesquare of the evolutionary kernel Γ(n,ω). Analogous tothe above Wold-Cramer representation, a discrete, time-frequency representation for a deterministic signal x(n) witha time-dependent spectrum is possible [13, 20]:
x(n) =K−1∑
k=0
X(n,ωk)e jωkn, 0 ≤ n ≤ N − 1, (12)
where ωk = 2πk/K , K is the number of frequency samples,andX(n,ωk) is a time-frequency evolutionary kernel. A simi-lar representation can be given in terms of the correspondingbi-frequency kernel X(Ωs,ωk):
x(n) =K−1∑
k=0
K−1∑
s=0
X(Ωs,ωk)e j(ωk+Ωs)n, (13)

4 EURASIP Journal on Advances in Signal Processing
Timevaryingwirelesschannel
1
1
1
1
Decoding,demodulationmodulation
S/P
1
Inputbits
Outputbits
Cyclicprefix
Cyclicprefix
Removecyclic prefix
Removecyclic prefix
Ant #1Ant #1 Y1X1
S/P
S/P
S/P
P/S
P/S
P/S
P/S
Coding,
K-pointIFFT
K-pointIFFT
K-pointFFT
K-pointFFTAnt #Ntx Ant #Nrx
YNrxXNtx
Channelestimation
Figure 1: MIMO-OFDM System Model.
where ωk and Ωs are discrete frequencies. Discrete evolu-tionary transformation (DET) is obtained by expressing thekernels X(n,ωk) or X(Ωs,ωk) by means of the signal [13].Thus, for the representation in (12) the DET that providesthe evolutionary kernel X(n,ωk), 0 ≤ k ≤ K − 1, is given by
X(n,ωk) =N−1∑
�=0
x(�)wk(n, �)e− jωk� , (14)
where wk(n, �) is, in general, a time- and frequency-dependent window.
The DET can be seen as a generalization of the short-time Fourier transform, where the windows are constant.The windows wk(n, �) can be obtained from either theGabor representation that uses nonorthogonal frames or theMalvar wavelet representation that uses orthogonal systems.Details of how the windows can be obtained for the Gaborand Malvar representations are given in [13]. However, forthe representation of multipath wireless channel outputs,we consider windows that are adapted to the Dopplerfrequencies of the channel.
3.2. MIMO-OFDM Channel Estimation by Using DET. Wewill now consider the computation of the spreading functionby means of the evolutionary transformation of the receivedsignal. The output of the channel, after discarding the cyclicprefix, for the nth OFDM symbol can be written using (8) as
y( j)n (m) =
Ntx∑
i=1
⎛⎜⎝
1√K
L(i, j)p −1∑
p=0
K−1∑
k=0
α(i, j)p e jψ
(i, j)p me jωk(m−N (i, j)
p )X (i)n,k
⎞⎟⎠
= 1√K
L(i, j)p −1∑
p=0
H(i, j)n (m,ωk)e jωkmX (i)
n,k,
(15)
where we ignore the additive channel noise η( j)(m) forsimplicity. The equation above can be rewritten in matrixform as
y(j) = H(j)x, (16)
where
y( j) =[y
( j)n (0), y
( j)n (1), . . . , y
( j)n (K − 1)
]T;
x =[
x(1), x(2), . . . , x(Ntx)]T
,
x(i) =[X (i)n,0,X (i)
n,1, . . . ,X (i)n,K−1
];
H(i, j) = [am,k]K×K , am,k = H
(i, j)n (m,ωk)e jωkm√
K;
H( j) =[
H(1, j), H(2, j), . . . , H(Ntx, j)].
(17)
The input-output relation for the whole system results as
y = Hx, (18)
where
H =
⎡⎢⎢⎢⎢⎣
H(1)
H(2)
...H(Nrx)
⎤⎥⎥⎥⎥⎦
, y =
⎡⎢⎢⎢⎢⎣
y(1)
y(2)
...y(Nrx)
⎤⎥⎥⎥⎥⎦. (19)
If H is known and then input symbols can be estimated bythe following relation,
x = H−1y. (20)
Now calculating the discrete evolutionary representation of
y( j)n (m), we get
y( j)n (m) =
K−1∑
k=0
Y( j)n (m,ωk)e jωkm. (21)

EURASIP Journal on Advances in Signal Processing 5
Comparing the representations of y( j)n (m) in (21) and (15),
we get the kernel as
Y( j)n (m,ωk) =
Ntx∑
i=1
(1√KH
(i, j)n (m,ωk)X (i)
n,k
). (22)
above relation is also valid at the preassigned pilot positionsk = k′ :
Y( j)n (m,ωr) = Y
′( j)n (m,ωk′)
=Ntx∑
i=1
(1√KH
′(i, j)n (m,ωk′)X
(i)n,k′
),
(23)
where r = 1, 2, . . . ,P and H′(i, j)n (m,ωk′) is a decimated
version of the H(i, j)n (m,ωk). Note that P is again the number
of pilots, and S = K/P is the distance between adjacent pilots.Finally if the pilot symbols are chosen to be orthogonal toeach other, the decimated frequency response of the channelbetween the ith transmitter and the jth receiver antennasmay be obtained as
H′(i, j)n (m,ωr) =
√K∥∥∥X′(i)n,r
∥∥∥
⟨Y
′( j)n (m,ωr) ,X
′(i)n,r
⟩. (24)
Taking the inverse DFT of H′(i, j)n (m,ωr) with respect to ωr
and DFT with respect to m, we obtain the downsampledspreading function S′(Ωs, �),
S′(i, j)n (Ωs, �)= 1S
L(i, j)p −1∑
p=0
α(i, j)p δ
(i, j)n
(Ωs−ψ(i, j)
p
)δ
(i, j)n
⎛⎝�−N
(i, j)p
S
⎞⎠.
(25)
By comparing S′(i, j)n (Ωs, �) and S
(i, j)n (Ωs, �), we observe that
the channel parameters α(i, j)p ,N
(i, j)p , and ψ
(i, j)p calculated from
S(i, j)n (Ωs, �) can also be estimated from the downsampled
spreading function S′(i, j)n (Ωs, �).
In the following, we present a method to estimatethe spreading function of the MIMO channel from thereceived signal. The time-frequency evolutionary kernel ofthe channel output in the jth receiver is obtained as
Y( j)n (m,ωk) =
K−1∑
�=0
y( j)n (�)wk(m, �)e− jωk�
=Ntx∑
i=1
⎛⎜⎝
1√K
K−1∑
s=0
X (i)n,s
L(i, j)p −1∑
p=0
α(i, j)p e−ωsN
(i, j)p
×N−1∑
�=0
wk(m, �)e j(ψ(i, j)p +ωs−ωk)�
⎞⎠.
(26)
We consider windows of the form wr(m, �) = e jψr (m−�),for 0 ≤ ψr ≤ π presented in [17] that depends on theDoppler frequency ψr . This window will give us the correct
representation of Y( j)n (m,ωk) only when ψr = ψ
(i, j)p ; in
fact, using the window wr(m, �) = e jψ(i, j)p (m−�), the above
representation of Y( j)n (m,ωk) becomes,
Y( j)n (m,ωk) =
Ntx∑
i=1
√KH
(i, j)n (m,ωk)X (i)
n,k, (27)
which is the expected result multiplied by K . In ourestimation procedure, we use windows wu(m, �) = e jωu(m−�)
where ωu is chosen in a discrete set with certain increments,ωu = πu/U ,u = 0, 1, 2, . . . ,U − 1. When ωu coincides withone of the Doppler frequencies in the channel, the spreadingfunction displays a large peak at the time-frequency position
(N(i, j)p ,ψ
(i, j)p ), corresponding to delay and Doppler frequency
of that transmission path, with magnitude proportional to
attenuation α(i, j)p . When ωu does not coincide with any of
the Doppler frequencies, the spreading function displays arandom sequence of peaks spread over all possible delays.Then it is possible to determine a threshold that permits usto obtain the most significant peaks of the spreading functioncorresponding to possible delays and Doppler frequencies. Inour experiments we observed that peaks having amplitudeslarger than 65% of the maximum peak are due to an actualtransmission; otherwise they are considered as noise. Thus,by searching in the possible Doppler frequency range, we areable to estimate all the parameters of a multi-path, fading,and time-varying MIMO-OFDM channel via the spreadingfunction of the channel.
According to (27), we need the input pilot symbols Xn,k′
to estimate the channel frequency response. Here we considersimple, uniform pilot patterns; however improved patternsmay be employed as well [11].
3.3. Time-Frequency Receiver. After estimating the spread-ing function and the corresponding frequency response
H(i, j)n (m,ωk) of the channel, data symbols X (i)
n,k can bedetected using a time-frequency receiver given in (20). Onthe other hand, the channel output in (9) can be rewritten as
R( j)n,k =
Ntx∑
i=1
⎛⎝ 1K
K−1∑
s=0
⎧⎨⎩
K−1∑
m=0
H(i, j)n (m,ωk) e j(ωs−ωk)m
⎫⎬⎭X
(i)n,s
⎞⎠ +N
( j)n,k
= 1K
K−1∑
s=0
B(i, j)n (ωk − ωs,ωs)Xn,s +Nn,k
=Ntx∑
i=1
⎛⎝ 1K
K−1∑
s=0
B(i, j)n (ωk − ωs,ωs) X (i)
n,s
⎞⎠ +N
( j)n,k ,
(28)
where B(i, j)n (Ωs,ωk) is the bi-frequency function of the
channel during nth OFDM symbol, and the above equationindicates a circular convolution with the data symbols. Based

6 EURASIP Journal on Advances in Signal Processing
on aforementioned equality it is possible to write the MIMO-OFDM system consisting of Ntx transmitter and Nrx receiverantennas in a matrix form as⎡⎢⎢⎣
r(1)
...r(Nrx)
⎤⎥⎥⎦ =
⎡⎢⎢⎣
B(1,1) · · · B(Ntx,1)
... · · · ...B(Nrx,1) · · · B(Ntx,Nrx)
⎤⎥⎥⎦
⎡⎢⎢⎣
x(1)
...x(Ntx)
⎤⎥⎥⎦ +
⎡⎢⎢⎣
z(1)
...z(Nrx)
⎤⎥⎥⎦
(29)
or
r = Bx + z, (30)
where B(i, j) = [bs,k]K×K = B(i, j)n (ωk − ωs,ωs) is a K ×
K matrix; r, x, and z are K × 1 vectors defined by
r( j) = [R( j)n,1,R
( j)n,2, . . . ,R
( j)n,K ]
T, x( j) = [X
( j)n,1 ,X
( j)n,2 , . . . ,X
( j)n,K ]
T,
and z( j) = [N( j)n,1 ,N
( j)n,2 , . . . ,N
( j)n,K ]
T, respectively. Finally, data
symbols X( j)n,k can be estimated by using a simple time-
frequency receiver: x = B−1r.The exhaustive search for the channel Doppler fre-
quencies may seem to increase the computational cost ofthe proposed method. However, considering the carrierfrequencies and maximum possible velocities in the envi-ronment, Doppler frequencies lie in a certain band whichcan be easily covered by the algorithm. Furthermore, ourchannel estimation approach does not require any a prioriinformation on the statistics of the channel as in the case ofmany other channel estimation methods [11].
In the following, we demonstrate time-varying MIMO-OFDM channel estimation performance of our time-frequency-based approach by means of examples.
4. Simulations
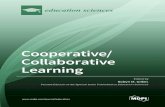
In the experiments, a 2-input, 2-output MIMO-OFDMsystem is considered, and the wireless channels are simulatedrandomly; that is, the number of paths, 1 ≤ Lp ≤ 5, thedelays, 0 ≤ Np ≤ LCP − 1, and the Doppler frequencyshift 0 ≤ ψp ≤ ψmax (p = 0, 1, . . . ,Lp − 1) of eachpath are picked randomly. Input data is QPSK coded andmodulated onto K = 128 subcarriers, 16 of which areassigned to pilot symbols. The Signal-to-Noise Ratio (SNR)of the channel noise is changed between 5 and 35 dB, for twodifferent values of the maximum Doppler frequency. Figure 2depicts an example of the estimated spreading function fora 2 × 2 MIMO system, during one OFDM symbol. In oursimulations, we use Doppler frequencies normalized by thesubcarrier spacing [21]:
fD = υ fccTsN. (31)
The performance of our channel estimation method isinvestigated and compared with that of a recently proposedtime-frequency varying MIMO-OFDM channel estimationapproach [12]. This method applies the discrete prolatespheroidal sequences to obtain a robust time-varying chan-nel estimator that does not require any channel statistics,similar to our proposed method.
032 64
96128(0)32 64
96 128
00.25
0.5
0.5
0.751(0)
0
1
0.5
Time (sample)
Frequency (×π rad.)
0.751R
elat
ive
atte
nu
atio
n
0.25
Spreading function |S(Ωs, ℓ)|
Figure 2: An example of estimated spreading function for the 2× 2MIMO-OFDM system.
5 10 15 20 25 30 35
fD = 1, 2D Slepian-basedfD = 0.2, 2D Slepian-based
fD = 1, TF-basedfD = 0.2, TF-based
10−4
10−3
10−2
10−1
100
101
SNR (dB)
MSE
Figure 3: MSE for proposed channel estimation and the methodpresented in [12] for 2× 2 MIMO-OFDM system for fD = 0.2 andfD = 1.
We show the mean square error (MSE) of our chan-nel estimation approach and the 2D Slepian-based two-dimensional channel estimation method [12] for differentchannel noise levels and for normalized Doppler frequenciesfD = 0.2 and fD = 1 in Figure 3. As seen from the graphs, ourmethod outperforms the Slepian-based approach in termsof both estimation error and robustness against increasedDoppler frequencies. Note that our method is capableof estimating and compensating for large Doppler shiftsyielding a similar MSE for both fD = 0.2 and fD = 1.
We then investigate the bit error rate (BER) versusSNR of the channel noise performance of both channelestimation approaches for different numbers of the pilotsymbols in one OFDM block, P = {8, 16, 32} and show theresults in Figure 4. Notice that for a fixed number of pilots,proposed TF-based approach achieves the same BER with

EURASIP Journal on Advances in Signal Processing 7
0 5 10 15 20 25 30 35
10−6
10−5
10−4
10−3
10−2
10−1
100
101
SNR (dB)
BE
R
2D Slepian-based, 8 pilot2D Slepian-based, 16 pilot2D Slepian-based, 32 pilot
TF-based, 8 pilotTF-based, 16 pilotTF-based, 32 pilot
Figure 4: BER versus SNR performance of the TF-based and 2DSlepian-based method presented in [12] for 2 × 2 MIMO-OFDMsystem for 8, 16, and 32 pilots.
about 15 dB less SNR than the Slepian-based method. Notealso that increasing the number of pilots improves the BERperformance in both methods.
Finally the effect of the number of channel propagationpaths is investigated. BER is calculated for both TF andSlepian-based channel estimation approaches by changingthe number of paths from 3 to 25 and for P = 8 and16 pilots. Results given in Figure 5 show that for the samenumber of paths, proposed TF-based approach achievesapproximately 100 times less BER than the 2D Slepian-basedchannel estimation method. Also notice that the BER per-formance goes down rapidly for the number of paths largerthan 12.
5. Conclusions
In this work, we present a time-varying estimation ofMIMO-OFDM channels for high-mobility communicationsystems by means of discrete evolutionary transform. Themain advantage of the proposed method is that it does notassume any statistics on the communication channel. Theparametric channel model used in this approach allows usto obtain a two-dimensional representation for the channeland estimate its parameters from the spreading function. Weobserve that the method is robust against large variationson the channel frequency response, that is, fast fading.Simulations show that our time-frequency-based methodhas considerably better channel estimation and bit errorperformance compared to a similar time-frequency varyingchannel estimation approach [12].
4 6 8 10 12 14 16 18 20 22 24
10−4
10−3
10−2
10−1
100
101
BE
R
2D Slepian-based, 8 pilot2D Slepian-based, 16 pilot
TF-based, 8 pilotTF-based, 16 pilot
Number of paths (SNR = 15 dB)
Figure 5: BER versus the number of channel paths for the TF-basedchannel estimation and the method presented in [12] for 8 and 16pilots and 15 dB SNR.
Acknowledgments
This work was partially supported by The Research Fundof The University of Istanbul, Project nos. 6904, 3898, and4382.
References
[1] V. Tarokh, N. Seshadri, and A. R. Calderbank, “Space-timecodes for high data rate wireless communication: performancecriterion and code construction,” IEEE Transactions on Infor-mation Theory, vol. 44, no. 2, pp. 744–765, 1998.
[2] H. A. Cirpan, E. Panayirci, and H. Dogan, “Nondata-aidedchannel estimation for OFDM systems with space-frequencytransmit diversity,” IEEE Transactions on Vehicular Technology,vol. 55, no. 2, pp. 449–457, 2006.
[3] A. Shah and A. M. Haimovich, “Performance analysis of opti-mum combining in wireless communications with Rayleighfading and cochannel interference,” IEEE Transactions onCommunications, vol. 46, no. 4, pp. 473–479, 1998.
[4] S. M. Alamouti, “A simple transmit diversity technique forwireless communications,” IEEE Journal on Selected Areas inCommunications, vol. 16, no. 8, pp. 1451–1458, 1998.
[5] A. J. Paulraj and T. Kailath, “Increasing capacity in wirelessbroadcast systems using distributed transmission/directionalreception,” US patent no. 5,345,599, 1994.
[6] H. Bolcskei, D. Gesbert, and A. J. Paulraj, “On the capacity ofOFDM-based spatial multiplexing systems,” IEEE Transactionson Communications, vol. 50, no. 2, pp. 225–234, 2002.
[7] G. J. Foschini and M. J. Gans, “On limits of wireless com-munications in a fading environment when using multipleantennas,” Wireless Personal Communications, vol. 6, no. 3, pp.311–335, 1998.
[8] A. Goldsmith, Wireless Communications, Cambridge Univer-sity Press, New York, NY, USA, 2005.

8 EURASIP Journal on Advances in Signal Processing
[9] T. Zemen, C. F. Mecklenbrauker, J. Wehinger, and R. R. Muller,“Iterative joint time-variant channel estimation and multi-user detection for MC-CDMA,” IEEE Transactions on WirelessCommunications, vol. 5, no. 6, pp. 1469–1478, 2006.
[10] G. L. Stuber, J. R. Barry, S. W. Mclaughlin, Y. E. Li, M. A.Ingram, and T. G. Pratt, “Broadband MIMO-OFDM wirelesscommunications,” Proceedings of the IEEE, vol. 92, no. 2, pp.271–293, 2004.
[11] S. G. Kang, Y. M. Ha, and E. K. Joo, “A comparativeinvestigation on channel estimation algorithms for OFDM inmobile communications,” IEEE Transactions on Broadcasting,vol. 49, no. 2, pp. 142–149, 2003.
[12] P. S. Rossi and R. R. Muller, “Slepian-based two-dimensionalestimation of time-frequency variant MIMO-OFDM chan-nels,” IEEE Signal Processing Letters, vol. 15, pp. 21–24, 2008.
[13] R. Suleesathira, L. F. Chaparro, and A. Akan, “Discreteevolutionary transform for time-frequency signal analysis,”Journal of the Franklin Institute, vol. 337, no. 4, pp. 347–364,2000.
[14] P. A. Bello, “Characterization of randomly time-variant linearchannels,” IEEE Transactions on Communications, vol. 11, no.4, pp. 360–393, 1963.
[15] M. D. Hahm, Z. I. Mitrovski, and E. L. Titlebaum, “Deconvo-lution in the presence of Doppler with application to specularmultipath parameter estimation,” IEEE Transactions on SignalProcessing, vol. 45, no. 9, pp. 2203–2219, 1997.
[16] F. Shu, J. Lee, L.-N. Wu, and G.-L. Zhao, “Time-frequencychannel estimation for digital amplitude modulation broad-casting systems based on OFDM,” IEE Proceedings on Commu-nications, vol. 150, no. 4, pp. 259–264, 2003.
[17] A. Akan and L. F. Chaparro, “Modeling and estimation ofwireless OFDM channels by using time-frequency analysis,”Circuits, Systems, and Signal Processing, vol. 25, no. 3, pp. 389–403, 2006.
[18] M. B. Priestley, Non-Linear and Non-Stationary Time SeriesAnalysis, Academic Press, London, UK, 1988.
[19] G. Melard and A. H. Schutter, “Contributions to evolutionaryspectral theory,” Journal of Time Series Analysis, vol. 10, pp.41–63, 1989.
[20] A. Akan and L. F. Chaparro, “Multi-window Gabor expansionfor evolutionary spectral analysis,” Signal Processing, vol. 63,no. 3, pp. 249–262, 1997.
[21] Z. Tang, R. C. Cannizzaro, G. Leus, and P. Banelli, “Pilot-assisted time-varying channel estimation for OFDM systems,”IEEE Transactions on Signal Processing, vol. 55, no. 5, pp. 2226–2238, 2007.

Photograph © Turisme de Barcelona / J. Trullàs
Preliminary call for papers
The 2011 European Signal Processing Conference (EUSIPCO 2011) is thenineteenth in a series of conferences promoted by the European Association forSignal Processing (EURASIP, www.eurasip.org). This year edition will take placein Barcelona, capital city of Catalonia (Spain), and will be jointly organized by theCentre Tecnològic de Telecomunicacions de Catalunya (CTTC) and theUniversitat Politècnica de Catalunya (UPC).EUSIPCO 2011 will focus on key aspects of signal processing theory and
li ti li t d b l A t f b i i ill b b d lit
Organizing Committee
Honorary ChairMiguel A. Lagunas (CTTC)
General ChairAna I. Pérez Neira (UPC)
General Vice ChairCarles Antón Haro (CTTC)
Technical Program ChairXavier Mestre (CTTC)
Technical Program Co Chairsapplications as listed below. Acceptance of submissions will be based on quality,relevance and originality. Accepted papers will be published in the EUSIPCOproceedings and presented during the conference. Paper submissions, proposalsfor tutorials and proposals for special sessions are invited in, but not limited to,the following areas of interest.
Areas of Interest
• Audio and electro acoustics.• Design, implementation, and applications of signal processing systems.
l d l d d
Technical Program Co ChairsJavier Hernando (UPC)Montserrat Pardàs (UPC)
Plenary TalksFerran Marqués (UPC)Yonina Eldar (Technion)
Special SessionsIgnacio Santamaría (Unversidadde Cantabria)Mats Bengtsson (KTH)
FinancesMontserrat Nájar (UPC)• Multimedia signal processing and coding.
• Image and multidimensional signal processing.• Signal detection and estimation.• Sensor array and multi channel signal processing.• Sensor fusion in networked systems.• Signal processing for communications.• Medical imaging and image analysis.• Non stationary, non linear and non Gaussian signal processing.
Submissions
Montserrat Nájar (UPC)
TutorialsDaniel P. Palomar(Hong Kong UST)Beatrice Pesquet Popescu (ENST)
PublicityStephan Pfletschinger (CTTC)Mònica Navarro (CTTC)
PublicationsAntonio Pascual (UPC)Carles Fernández (CTTC)
I d i l Li i & E hibiSubmissions
Procedures to submit a paper and proposals for special sessions and tutorials willbe detailed at www.eusipco2011.org. Submitted papers must be camera ready, nomore than 5 pages long, and conforming to the standard specified on theEUSIPCO 2011 web site. First authors who are registered students can participatein the best student paper competition.
Important Deadlines:
P l f i l i 15 D 2010
Industrial Liaison & ExhibitsAngeliki Alexiou(University of Piraeus)Albert Sitjà (CTTC)
International LiaisonJu Liu (Shandong University China)Jinhong Yuan (UNSW Australia)Tamas Sziranyi (SZTAKI Hungary)Rich Stern (CMU USA)Ricardo L. de Queiroz (UNB Brazil)
Webpage: www.eusipco2011.org
Proposals for special sessions 15 Dec 2010Proposals for tutorials 18 Feb 2011Electronic submission of full papers 21 Feb 2011Notification of acceptance 23 May 2011Submission of camera ready papers 6 Jun 2011