Tiểu Luận MHH-MP
18
Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh Nguyễn Văn Hải - 1520614 Page 1 Bộ Giáo Dục & Đào Tạo Trường Đại Học Sư Phạm Kỹ Thuật TP. Hồ Chí Minh ~~~~ʘ~~~~ NGUYỄN VĂN HẢI DYNAMIC LOAD AND PROGRAMMABLE VOLTAGE SOURCE – TẢI ĐỘNG VÀ NGUỒN ÁP LẬP TRÌNH Tiểu Luận Mô Hình Hóa – Mô Phỏng TP. HỒ CHÍ MINH – 9/2015
Transcript of Tiểu Luận MHH-MP

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 1
Bộ Giáo Dục & Đào Tạo
Trường Đại Học Sư Phạm Kỹ Thuật TP. Hồ Chí Minh
~~~~ʘ~~~~
NGUYỄN VĂN HẢI
DYNAMIC LOAD AND PROGRAMMABLE
VOLTAGE SOURCE – TẢI ĐỘNG VÀ NGUỒN ÁP
LẬP TRÌNH
Tiểu Luận Mô Hình Hóa – Mô Phỏng
TP. HỒ CHÍ MINH – 9/2015

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 2
MỤC LỤC
Trang
Trang bìa .................................................................................................................... 1
Mục lục ....................................................................................................................... 2
Chương 1 .................................................................................................................... 3
1.1 Phần mềm Matlab và chương trình mở rộng Simulink ......................................... 2
1.2 Tải động và nguồn áp lập trình .............................................................................. 5
Chương 2 .................................................................................................................... 6
2.1 Khởi tạo các công cụ cần thiết ............................................................................... 6
2.2 Cài đặt thông số cho các khối ............................................................................... 12
2.3 Chạy chương trình mô phỏng ............................................................................... 14
2.4 Nhận xét ................................................................................................................ 18

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 3
CHƯƠNG 1
GIỚI THIỆU
1.1 Phần mềm Matlab và chương trình mở rộng Simulink
Simulink là chương trình mở rộng của Matlab nhằm mục đích mô hình hóa, mô
phỏng và khảo sát các hệ thống động học.
Hình 1.1 Giao diện Matlab và chương trình Simulink.
Hình 1.2 Simulink

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 4
Trong tiểu luận, sử dụng một công cụ SimpowerSystem trong thư viện Simulink này
để mô phỏng tải trọng động và nguồn áp lập trình được.
Công cụ SympowerSystem có thể được lấy ra bằng 2 cách:
Cách 1: gõ chữ “ powerlib “ trong khung Command Window của Matlab
Hình 1.3 Thư viện các công cụ trong hệ thống điện
Cách 2: lấy trong chương trình Simulink như hình dưới:
Hình 1.4 Simulink → Simscape → SympowerSystem.
Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 5
1.2 Tải động và nguồn áp lập trình
Tải động lực và nguồn áp lập trình được
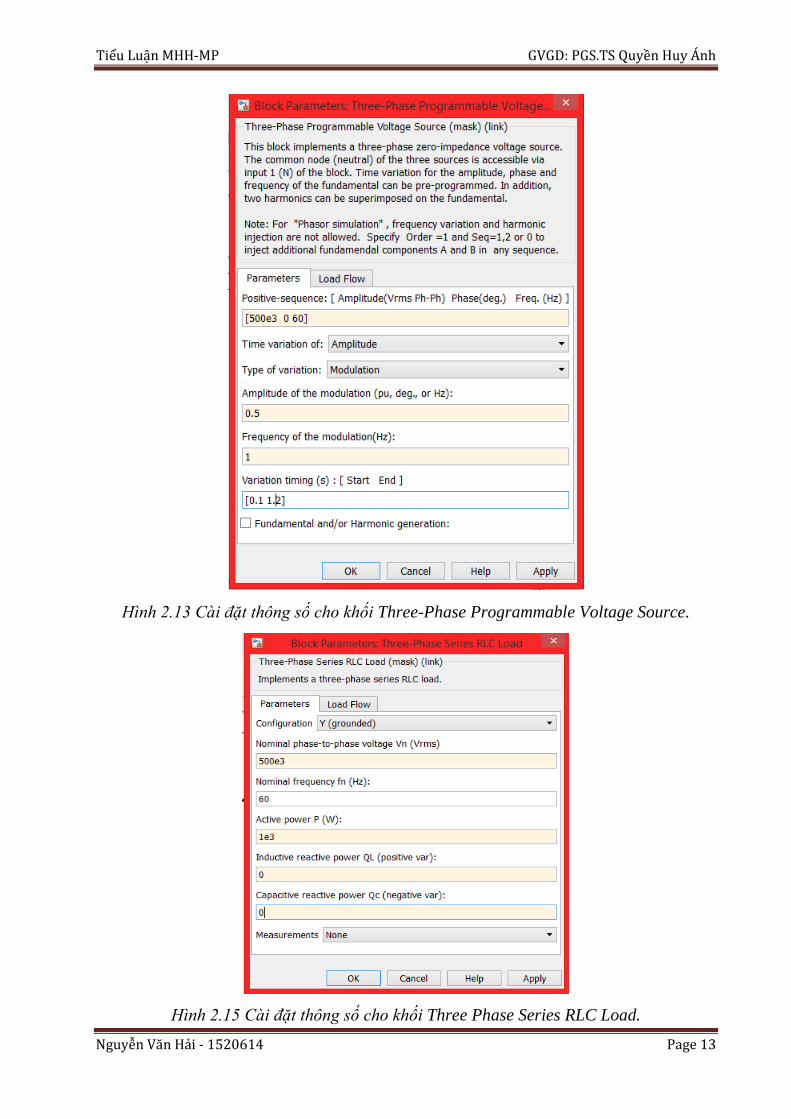
Một tải động được kết nối vào lưới điện 500kV, 60Hz. Mạng lưới này được mô
phỏng bằng Thevenin tương đương (nguồn áp sau trở kháng R-L ứng với ngắn mạch 3
pha khoảng 2000MVA). Nguồn áp nội bộ được điều chế để mô phỏng sự thay đổi điện
áp trong nguồn biến động. Tải động là một mô hình phi tuyến được mô phỏng bằng
nguồn dòng. Nó không thể nối được với mạng cảm (RL nối tiếp). Do đó, một tải trở nhỏ
(khoảng 1MW) được thêm vào và nối song song với tải động.
Công suất tác dụng P và công suất phản kháng Q được xác định bằng phương trình
sau:
If V > Vmin
P = Po*(V/Vo); Q = Qo*(V/Vo)
If V < Vmin
P = Po*(V/Vo)^2; Q = Qo*(V/Vo)^2
Nói cách khác, miễn là điện áp cao hơn 0,7 pu, tải hiện tại là không đổi. Khi điện áp
giảm xuống dưới 0,7 pu tải hoạt động như một trở kháng không đổi.
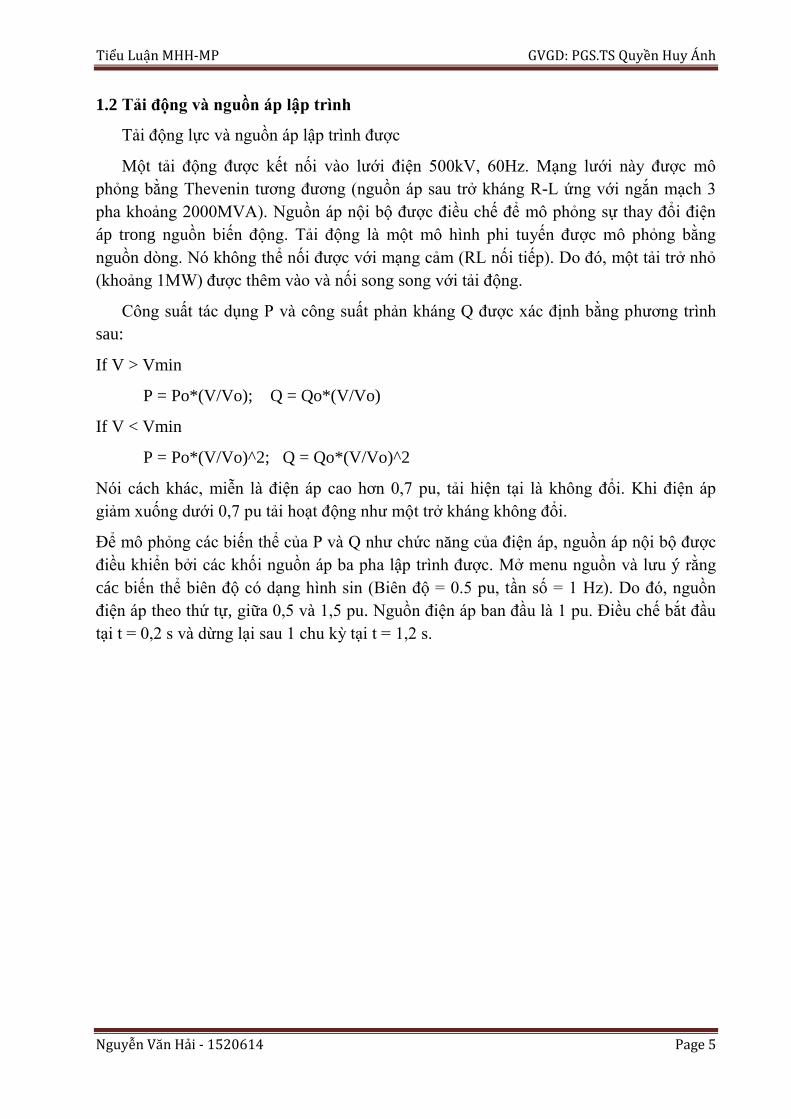
Để mô phỏng các biến thể của P và Q như chức năng của điện áp, nguồn áp nội bộ được
điều khiển bởi các khối nguồn áp ba pha lập trình được. Mở menu nguồn và lưu ý rằng
các biến thể biên độ có dạng hình sin (Biên độ = 0.5 pu, tần số = 1 Hz). Do đó, nguồn
điện áp theo thứ tự, giữa 0,5 và 1,5 pu. Nguồn điện áp ban đầu là 1 pu. Điều chế bắt đầu
tại t = 0,2 s và dừng lại sau 1 chu kỳ tại t = 1,2 s.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 6
CHƯƠNG 2
MÔ PHỎNG TẢI ĐỘNG VÀ NGUỒN ÁP LẬP TRÌNH
2.1 Khởi tạo các công cụ cần thiết:
Sử dụng các công cụ cần thiết để tạo nên hệ thống sau:
Hình 2.1 Mô phỏng tải động và nguồn áp lập trình được.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 7
Tạo cửa sổ làm việc bằng cách nhấn File/New/Model.
Hình 2.2 Cửa sổ làm việc.
Ở thư viện làm việc, vào mục Specialized Technology / Electrical Sources, ta lấy khối
Three Phase Programable Source ra:
Hình 2.3 Địa chỉ khối Three Phase Programable Source.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 8
Vào mục Specialized Technology / Element, lấy khối Three-Phase Series RLC
Branch, khối Three-Phase Series RLC Load và khối Three Phase Dynamo Load ra:
Hình 2.4 Địa chỉ khối Three-Phase Series RLC Branch.
Hình 2.5 Địa chỉ khối Three-Phase Series RLC Load.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 9
Hình 2.6 Địa chỉ khối Three Phase Dynamo Load.
Vào mục Specialized Technology/ Measurement, lấy khối Three-Phases VI
Measurement ra:
Hình 2.7 Địa chỉ khối Three-Phases VI Measurement.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 10
Vào mục Specialized Technology / Control and Measurement / Measurement, lấy
khối Sequence Analyzer và khối Power ra:
Hình 2.8 Địa chỉ khối Sequence Analyzer.
Hình 2.9 Địa chỉ khối Power (3ph, Instantaneous).

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 11
Và cuối cùng là các khối Scope, Powergui, Terminator và Ground, ta sẽ đánh tên vào
nơi tìm kiếm và lấy chúng ra, ví dụ với khối Scope:
Hình 2.10 Cách lấy khối Scope.
Hình 2.11 Tất cả các khối sau khi lấy ra.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 12
Sau khi đã lấy tất cả các khối cần thiết ra ngoài, ta nối chúng lại như hình ban đầu.
Hình 2.12 Nối các khối lại với nhau.
2.2 Cài đặt thông số cho các khối:
Hình 2.14 Cài đặt thông số cho khối Three Phase Series RLC Branch.
Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 13
Hình 2.13 Cài đặt thông số cho khối Three-Phase Programmable Voltage Source.
Hình 2.15 Cài đặt thông số cho khối Three Phase Series RLC Load.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 14
Hình 2.16 Cài đặt thông số cho khối Three Phase Dynamo Load
2.3 Chạy chương trình mô phỏng
Hình 2.17: Chạy mô phỏng

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 15
Hình 2.18 Biểu đồ khối scope 1.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 16
Hình 2.19 Biểu đồ khối scope 2.
Hình 2.20 Biểu đồ khối Scope 3.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 17
Hình 2.21 Thông số Khối Dynamic Load.
Hình 2.22 Thông số áp tính được.

Tiểu Luận MHH-MP GVGD: PGS.TS Quyền Huy Ánh
Nguyễn Văn Hải - 1520614 Page 18
2.4 Nhận xét
Khi mô phỏng và quan sát điện áp tải cùng công suất P & Q và dòng điện trên
Scope1. Quan sát mô phỏng bắt đầu trong trạng thái ổn định. Tại t = 0,2 s, khi điện áp
thay đổi, P và Q bắt đầu tăng (trace 2), tải hiện tải (trace 3) vẫn không đổi. Khi điện áp
giảm xuống dưới 0,7 pu, tải hoạt động như một trở kháng cố định. Do đó, tải thay đổi
theo sự biến đổi điện áp này. Quan sát trên Scope2, sự thay đổi của áp và dòng tức thời.
Ngoài ra, còn nhận thấy rằng P và Q hiển thị trên Scope3 cũng tương tự như tín hiệu P và
Q được trả về bằng cách đo ngõ ra khối Dynamic Load.