SVD filtering applied to ground-roll attenuation
19
. SVD filtering applied to ground-roll attenuation Milton J. Porsani + Michelˆ angelo G. Silva + Paulo E. M. Melo + and Bjorn Ursin * + Centro de Pesquisa em Geof´ ısica e Geologia (UFBA) and National Institute of Science and Technology of Petroleum Geophysics (CNPQ) Instituto de Geociˆ encias, Universidade Federal da Bahia. Campus Universit´ ario da Federa¸c˜ ao Salvador, Bahia, Brasil. Email: [email protected] * Norwegian University of Science and Technology (NTNU), Department of Petroleum Engineering and Applied Geophysics, S.P. Andersenvei 15A, NO-7491 Trondheim, Norway Email: [email protected] 1
Transcript of SVD filtering applied to ground-roll attenuation

.
SVD filtering applied to ground-roll attenuation
Milton J. Porsani+
Michelangelo G. Silva+
Paulo E. M. Melo+
and Bjorn Ursin∗
+ Centro de Pesquisa em Geofısica e Geologia (UFBA) and National
Institute of Science and Technology of Petroleum Geophysics (CNPQ)
Instituto de Geociencias, Universidade Federal da Bahia.
Campus Universitario da Federacao
Salvador, Bahia, Brasil.
Email: [email protected]
∗ Norwegian University of Science and Technology (NTNU),
Department of Petroleum Engineering and Applied Geophysics,
S.P. Andersenvei 15A, NO-7491 Trondheim, Norway
Email: [email protected]
1

Abstract
We present a singular value decomposition (SVD) filtering method for atten-
uation of the ground roll. Before the SVD computation, normal move-out
(NMO) correction is applied to the seismograms, with the purpose of flatten-
ing the reflections. SVD is performed on a small number of traces in a sliding
window. The output trace is the central trace of the first few eigenimages.
These contains mostly horizontally aligned signals, and other noise in the data
will be suppressed. By performing this action with the sliding window moving
in steps of one trace, the number of output traces is equal to the number of
input traces. The new method preserves the character and frequency content
of the horizontal reflections and attenuates all other type of events. We il-
lustrate the method using land seismic data of the Tacutu basin, located in
the north-east part of Brazil. The results show that the proposed method is
effective and is able to reveal reflections masked by the ground-roll. The new
SVD filtering approach provides results of better quality, when compared with
results obtained from the conventional f-k filtering method.
2

Introduction
Ground roll is a particular type of Rayleigh wave and has high amplitude,
low frequency, and low velocity, being the main type of coherent noise in land
seismic surveys. Ground roll is also dispersive and normally overwhelms the
desired reflected signal. Because of its dispersive nature, ground-roll masks at
short offsets the shallow reflections, and at long offsets the deeper reflections
(Claerbout, 1983; Saatcilar and Canitez, 1988; Henley, 2003). Many authors
have shown that the ground roll can be attenuated by proper acquisition design
and filtering (Harlan et al., 1984; Anstey, 1986; Shieh and Herrmann, 1990;
Pritchett, 1991; Brown and Clapp, 2000). Such a strategy may either have
logistical limitations or may not be applicable to data already acquired.
One of the most simple filtering approaches used in the ground roll attenuation
problem is f-k filtering, which is applied in the frequency × spatial wave-
number domain. The f-k method uses 2-D Fourier transform (Embree et al.,
1963; Wiggins, 1966) and the ground-roll, represented by linear events with low
velocities, is mapped as lines in the f-k domain. It can consequently be filtered
using a 2D band-pass filter. This has the disadvantage that it also eliminates
reflected energy which contributes to the character of reflected events.
Various methods to filter ground roll have been proposed in recent years.
Deighan and Watts (1997) proposed the use of wavelets which does not assume
that the signal is stationary. Liu (1999) and Montagne and Vasconcelos (2006)
proposed the use of the Karhunen-Loeve transform to estimate and subtract
the ground roll from the common-shot gathers. SVD is a coherency-based
technique that provides both signal enhancement and noise suppression. It
has been implemented in a variety of seismic applications (Freire and Ulrych,
1988, Bekara and van der Baan, 2006). Kendall et al. (2005) proposed a
SVD-polarization filter for ground roll attenuation on multicomponent data.
Tyapkin et al. (2003) proposed to use the data alignment method of Liu
3

(1999) to make the coherent noise horizontally aligned in one or more time
sections of a common shot gather. In each of the time sections the noise is
represented by the first eigenimages (with a given fraction of the total energy).
The remaining eigenimages represent the signal, and this part is transformed
back to the original time-space domain. Chiu and Howell (2008) proposed a
method that uses SVD to compute eigenimages that represent coherent noise in
a localized time-space windows. The data in the local windows is transformed
into analytic signal and followed by a complex SVD to decompose the analytic
signal into eigenimages that represent the coherent noise model. Yarham et
al. (2006) proposed a two stage method of identifying and removing ground
roll using the curvelet transform. Karsli and Bayrak (2008) proposed to use
a Wiener filter in the estimation of ground roll via a reference noise such as
a linear or nonlinear sweep signal. Melo et al. (2009) presented a filtering
method for ground-roll attenuation that uses a 2-D time-derivative filter.
Bekara and van der Baan (2006) proposed a local SVD approach to noise
removal. In each data window the signal is horizontally aligned in time, and
after SVD only the first eigenimage is retained. Then the procedure is repeated
in the next data window using sliding windows with 50% overlap. Here we
proposed a new approach to local SVD noise removal. In each data window
(consisting of an odd number of traces) the signal is aligned in time. After SVD
only the middle trace of the first one or two eigenimages is retained. Then the
data window is moved one trace position and the procedure is repeated. This
preserves the amplitude and character of horizontal events and attenuates all
other events.
We illustrate the method using land seismic data from the Tacutu basin (lo-
cated in the north-est part of Brazil) acquired by PETROBRAS in 1981 (Eiras
and Kinoshita, 1990). The results are compared with f-k filtering.
4

SVD Filtering
We consider a seismic data set d(t, xn), t = 1, . . . , Nt , n = 1, . . . , Nx where
the primary reflections have been corrected for NMO so that they are hor-
izontally aligned in the x-direction. A windowed data set of 2M + 1 traces
centered at xn is given by the matrix Dn with components Dntj = d(t, xn+j), t =
1, . . . , Nt, j = −M, . . . , 0, . . . ,M . It can be represented by the reduced
SVD (Golub & van Loan, 1996):
Dn =2M+1∑k=1
σkukvTk (1)
where the left singular vectors uk are orthogonal and the right singular vector
vk also are orthogonal. The singular values are sorted such that σ1 ≥ σ2 ≥. . . ≥ σ2M+1 ≥ 0. In component form the SVD is
Dntj = d(t, xn+j) =
2M+1∑k=1
σkuk(t)vk(j) (2)
with t = 1, . . . , Nt and j = −M, . . . ,M .
In the filtered output data set only the first K eigenimages or the center trace
is being used. That is, the output is
d(t, xn) =K∑
k=1
σkuk(t)vk(0) (3)
The procedure is started at n = M + 1 where the filtered output is the K
eigenimages of the first M + 1 traces:
5

d(t, xM+1+j) =K∑
k=1
σkuk(t)vk(j) , j = −M, . . . , 0. (4)
Them n is increase by one and equation (3) is used until n = Nx −M where
the output data are given by the K first eigenimages of the last M + 1 traces.
That is
d(t, xNx−M+j) =K∑
k=1
σkuk(t)vk(j), j = 0, . . . ,M (5)
The sliding window scheme is shown in Figure 1 for a window of 5 traces
(M = 2).
The result is a filtered data set d(t, xn) of the same dimension as the input data
set where energy which is not coherent in the x-direction has been attenuated.
Both the character and amplitude of the horizontal events are well preserved
as they are represented by the first eigenimages which have the largest energy.
Data Results
The proposed method of SVD filtering was tested on the RL-5090 land seismic
line. It contains 179 shots recorded at 4 ms sampling interval. There are 96
channels per shot in a split-spread geometry with offsets 2.500-150-0-150-2.500
m and 50 m between the geophones. The distance between the shots is 200 m
giving a low CMP coverage of 12 fold.
The data processing was very basic. First a standard processing sequence was
applied: geometry, edit, preliminary spherical divergence correction, standard
velocity analysis and NMO correction. Due to the limited CMP coverage, the
6

data were then resorted into shot gathers before the SVD filtering was applied.
In the filtering process we used a 5-trace window (M=2 in equation (1)) for the
SVD analysis, and we kept the two most significant central eigentraces (K=2
in equation (3)). The results were compared to a classical f-k filter method
where all non-horizontal events were filtered out.
Fig. 2a shows a shot gather after NMO-correction. The results after f-k
filtering and SVD filtering are shown in Fig. 2b and 2c, respectively. The
ground roll is very well filtered in both cases, and the horizontal events which
are associated with the reflections of interest are preserved. However, the SVD
filtered data exhibit less smear and have more lateral character than the f-k
filtered data.
In order to compare f-k spectra of the three shot gathers, they were muted,
as shown in Fig. 3. The corresponding f-k spectra in Fig. 4 show the severe
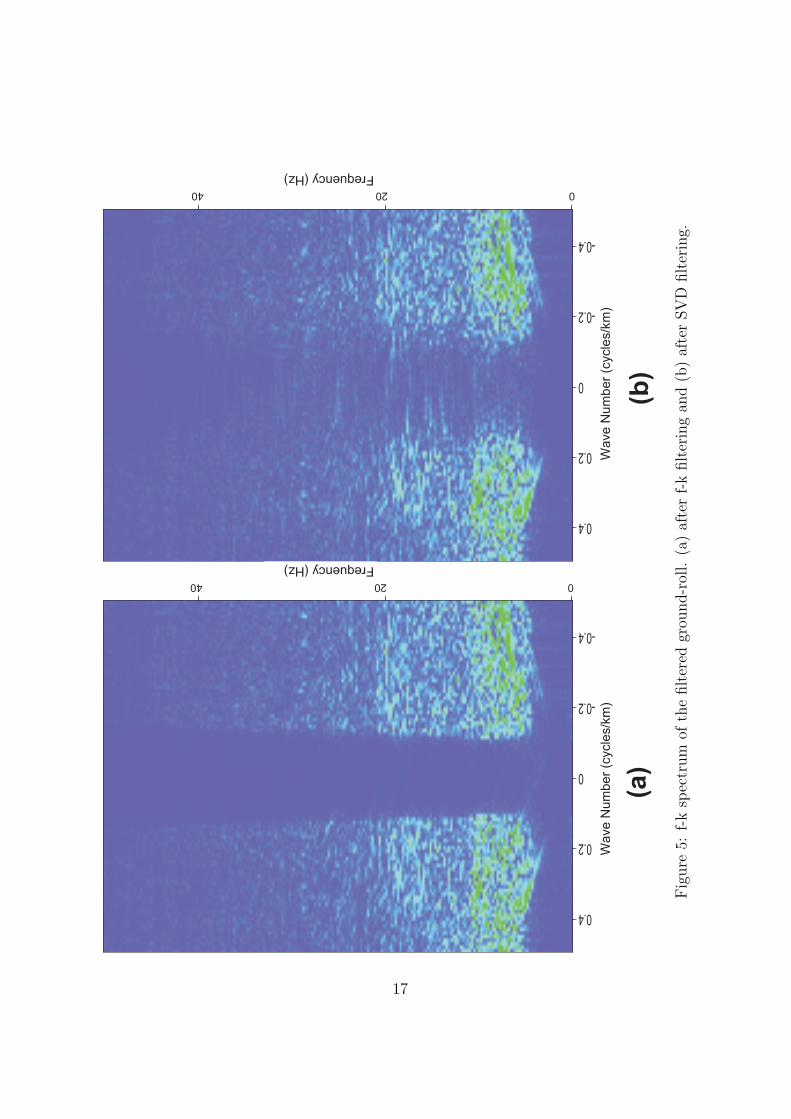
cut-off characteristic of the f-k filter. The spectra of the f-k filtered ground
roll are shown in Fig. 5. From the two last figures one can see that the
f-k filter separates the input data in two separate regions of the f-k domain
(as expected). The SVD filter has a less dramatic effect, leaving estimated
signal in the larger wave-number domain, and it reduces noise also in the low
wave-number domain.
The three shot-point gathers in Fig. 2 are shown in Fig. 6 after the removal
of NMO correction. The effect of f-k filtering and SVD filtering are similar as
seen in the NMO corrected gathers. The SVD filter seems to have removed
noise in a better way than the f-k filter, preserving the character of the data.
The two filtering procedures were applied to the complete NMO corrected
data set before stacking. Details from the resulting stacked sections are shown
in Fig. 7. Both f-k filtering and SVD filtering have reduced the noise. And
again, the SVD filtered section has less smear and more character than the f-k
filtered section.
7

Conclusions
We have developed a new and efficient SVD filter method which enhances
horizontal events on seismic sections. The SVD filter process preserves the
character and frequency content of the horizontal reflections and attenuate all
other types of events. The method was successfully applied to ground roll
attenuation on a land seismic data set. In particular, ground roll was virtually
absent from the filtered pre-stack gathers. f-k filtering of the same data set
also removed the ground roll, but it resulted in loss of lateral variation in the
data.
Acknowledgements
The authors wish to express their gratitude to FINEP, FAPESB and CNPq,
Brazil, for financial support. We also thanks PARADIGM, LANDMARK,
SEISMIC-MICRO TECHNOLOGY and Schulumberger for the licenses granted
to CPGG-UFBA. Bjorn Ursin has received financial support from the VISTA
project and from the Norwegian Research Council through the ROSE project.
8

References
Anstey, N. 1986. Whatever happened to ground-roll?. The Leading Edge, 5,
40-46.
Bekara, M. and Baan, M. V, 2007, Local singular value decomposition for signal
enhancement of seismic data: Geophysics, 72, V59-V65.
Brown, M., and R. G. Clapp, 2000, (T-x) domain, pattern-based ground-roll re-
moval: 70th Ann. Internat. Mtg., Soc. Expl. Geophys., Expanded Abstracts,
2103-2106.
Chiu, S. K. and Howell, J. E., 2008, Attenuation of coherent noise using localized-
adaptive eigenimage filter: 78th Ann. Internat. Mtg., Soc. Expl. Geophys.,
Expanded Abstracts, 2541-2545.
Claerbout, J. F. 1983. Ground roll and radial traces: Stanford Exploration
Project Report, SEP-35, 43-53.
Eiras, J. F. and Kinoshita, E. M., 1990, Geologia e perspectivas petrolıferas da
Bacia do Tacutu, Origem e Evolucao das Bacias Sedimentares: PETROBRAS,
Anais, 197-220.
Embree, P., Burg, J. P. e Backus, M. M., 1963, Wide-band velocity filtering -
the pie-slice process: Geophysics, 28, 948-974.
Deighan, A. J. and Watts, D. R., 1997, Ground-roll suppression using the wavelet
transform: Geophysics 62, 1896-1903.
Freire, S. L. M., and T. J. Ulrych, 1988, Application of singular value decompo-
sition to vertical seismic profiling: Geophysics, 53, 778-785.
Golub, G. H., and C. F. V. Loan, 1996, Matrix computations: Johns Hopkins
University Press.
9

Harlan, W. S., Claerbout J. F. and Rocca F., 1984, Signal/noise separation and
velocity estimation: Geophysics, 49, 1869-1880.
Henley, D. C., 2003, Coherent noise attenuation in the radial trace domain:
Geophysics, 68, 1408-1416.
Karsli, H. and Bayrak, Y., 2008, Ground-roll attenuation based on Wiener filter-
ing and benefits of time-frequency imaging: The Leading Edge, 27, 206-209.
Kendall R., Jin, S., Ronen, S., 2005, An SVD-polarization filter for ground roll
attenuation on multicomponent data: 77th Ann. Internat. Mtg., Soc. Expl.
Geophys., Expanded Abstracts, 928-932.
Liu, X, 1999, Ground roll suppression using the Karhunen-Loeve transform:
Geophysics 64, 564-566.
Melo, P. E. M., Porsani, M. J. and Silva, M. G, 2009, Ground roll attenuation
using a 2D time derivative filter: Geophysical Prospecting. Received May
2007, revision accepted July 2008.
Montagne, R., and Vasconcelos, G. L., 2006, Optimized suppression of coherent
noise from seismic data using the karhunen-Loeve transform: Physical Review
E., 74, 1-9.
Pritchett, W., 1991, System design for better seismic data: The Leading Edge,
11, 30-35.
Saatcilar, R. and Canitez, N., 1988, A method of ground-roll elimination: Geo-
physics 53, 894-902.
Shieh, C. and Herrmann, R. B., 1990, Ground roll: Rejection using polarization
filters: Geophysics, 55, 1216-1222.
Tyapkin, Y. K., Marmalyevskyy, N. Y. and Gornyak, Z. V., 2003, Source-
generated noise attenuation using the singular value decomposition: 75th Ann.
10

Internat. Mtg. Soc. Expl. Geophys., Expanded Abstracts.
Wiggins, R. A., 1966, W-K Filter design: Geophysical Prospecting, 14, 427-440.
Yarham, C., Boeniger, U. and Herrmann, F., 2006, Curvelet-based ground roll
removal: 76th Ann. Internat. Mtg., Soc. Expl. Geophys., Expanded Ab-
stracts, 2777-2780.
11

Figures
FIG. 1. Sliding window SVD filtering scheme.
FIG. 2. Comparison of SVD filtering with f-k filtering. (a) input data, (b)
output after f-k filtering, (c) output after SVD filtering.
FIG. 3. Muted seismograms preserving the ground-roll area. (a) muted input
data, (b) after f-k filtering, (c) after SVD filtering.
FIG. 4. f-k spectrum of the muted original and filtered seismograms shown
in Fig. 3. (a) input data, (b) f-k filtering, (c) SVD filtering.
FIG. 5. f-k spectrum of the filtered ground-roll. (a) after f-k filtering and (b)
after SVD filtering.
FIG. 6. Comparison of SVD filtering with f-k filtering after inverse NMO
correction. (a) input data, (b) output after f-k filtering, (c) output after SVD
filtering.
FIG. 7. Details from the stacked sections: (a) original data (b) f-k filtered
data, (c) SVD filtered data.
12

Figure 1: Sliding window SVD filtering scheme.
13

0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Time(s)
2040
6080
Tra
ces
(a)
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
2040
6080
Tra
ces
(b)
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
2040
6080
Tra
ces
(c)
Fig
ure
2:C
ompar
ison
ofSV
Dfilt
erin
gw
ith
f-k
filt
erin
g.(a
)in
put
dat
a,(b
)ou
tput
afte
rf-
kfilt
erin
g,(c
)ou
tput
afte
rSV
Dfilt
erin
g.
14

0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Time(s)
2040
6080
Tra
ces
(a)
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
2040
6080
Tra
ces
(b)
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
2040
6080
Tra
ces
(c)
Fig
ure
3:M
ute
dse
ism
ogra
ms
pre
serv
ing
the
grou
nd-r
oll
area
.(a
)m
ute
din
put
dat
a,(b
)af
ter
f-k
filt
erin
g,(c
)af
ter
SV
Dfilt
erin
g.
15

Fig
ure
4:f-
ksp
ectr
um
ofth
em
ute
dor
igin
alan
dfilt
ered
seis
mog
ram
ssh
own
inF
ig.
3.(a
)in
put
dat
a,(b
)f-
kfilt
erin
g,(c
)SV
Dfilt
erin
g.
16
Fig
ure
5:f-
ksp
ectr
um
ofth
efilt
ered
grou
nd-r
oll.
(a)
afte
rf-
kfilt
erin
gan
d(b
)af
ter
SV
Dfilt
erin
g.
17

0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
Time(s)
2040
6080
Tra
ces
(a)
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
2040
6080
Tra
ces
(b)
0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
2040
6080
Tra
ces
(c)
Fig
ure
6:C
ompar
ison
ofSV
Dfilt
erin
gw
ith
f-k
filt
erin
gaf
ter
inve
rse
NM
Oco
rrec
tion
.(a
)in
put
dat
a,(b
)ou
tput
afte
rf-
kfilt
erin
g,(c
)ou
tput
afte
rSV
Dfilt
erin
g.
18

1.5
1.8
2.0
2.2
2.5
2.8
3.0
Tim
e(s)
20 21 22 23 24 25Distance (Km)
(a)
1.5
1.8
2.0
2.2
2.5
2.8
3.0
Tim
e(s)
20 21 22 23 24 25Distance (Km)
(b)
1.5
1.8
2.0
2.2
2.5
2.8
3.0
Tim
e(s)
20 21 22 23 24 25Distance (Km)
(c)
Figure 7: Details from the stacked sections: (a) original data (b) f-k filtereddata, (c) SVD filtered data.
19