Static and dynamic testing of bridges through microwave interferometry
7
NDT&E International 40 (2007) 208–214 Static and dynamic testing of bridges through microwave interferometry Massimiliano Pieraccini a, , Filippo Parrini a , Matteo Fratini a , Carlo Atzeni a , Paolo Spinelli b , Michelangelo Micheloni c a Department of Electronics and Telecommunications, University of Florence, via Santa Marta 3, 50139 Florence, Italy b Department of Civil Engineering, University of Florence, via Santa Marta 3, 50139 Florence, Italy c GPA Ingegneria srl, Viale della Repubblica 279, 59100 Prato, Italy Received 20 July 2006; received in revised form 23 September 2006; accepted 9 October 2006 Available online 21 November 2006 Abstract A novel microwave sensor capable of remote detection of structural displacements is experimented as geotechnical instrument for static and dynamic testing of bridges. The sensor is based on an interferometric radar providing range imaging capability and sub- millimetric accuracy range displacement measurement. Dynamic monitoring calls for sampling rate high enough for transient analysis, while static monitoring requires long-term stability. The instrument has been designed in order to provide both these features. The results of a validation campaign on a railway bridge during the final test before going into service are reported. r 2006 Elsevier Ltd. All rights reserved. Keywords: Radar; Remote sensing; Interferometry; Dynamic monitoring; Structural test 1. Introduction Static and dynamic tests of bridges are routinely carried out before going into service in order to validate structural specifications, or during their operation life, in order to provide diagnostic surveys for planning rehabilitation, maintenance and repair. Currently, static and dynamic tests are implemented by using different equipments [1]. Static tests are performed using a dumpy level, which optically detects the vertical displacement of targets positioned on the bridge. Dynamic tests are usually implemented by networks of acceler- ometers installed on the structure. In both cases, the placement of targets, or accelerometers, is the most time consuming and expensive operation, as monitoring of large structures can require the use of costly scaffolding. Moreover, the installation of sensors can require to keep the bridge out of service for a considerable time. That can be a serious drawback if the structure supports a public utility. Non-contact sensors have already been proposed in literature. In 1999, Farrar [2] described a microwave sensor without imaging capability for non-contact measurements of vibration frequency in dynamic testing of structures. Static deformation of a variety of structures, such as concrete girders in anechoic chamber [3], dams [4], bridges [5], and buildings [6] have been detected using ground- based synthetic aperture radar. While this technique offered both imaging capability and displacement measure- ment, it was too slow to detect dynamic behavior. Recently, the authors designed and realized an inter- ferometric radar able to provide images with sampling rate high enough to track the movements of architectural structures [7,8]. In this paper, the application of this novel instrument to perform both static and dynamic testing of bridges is described. The working principle, potential and issues are discussed with particular attention to the operating conditions. Experimental results of a number of validation tests on a just built railway bridge are reported. 2. The equipment The equipment is based on a continuous-wave step- frequency radar [5–8], that transmits, step-by-step, con- tinuous waves at discrete frequency values, sampling a ARTICLE IN PRESS www.elsevier.com/locate/ndteint 0963-8695/$ - see front matter r 2006 Elsevier Ltd. All rights reserved. doi:10.1016/j.ndteint.2006.10.007 Corresponding author. Tel.: +39 0554796273. E-mail address: massimiliano.pieraccini@unifi.it (M. Pieraccini).
Transcript of Static and dynamic testing of bridges through microwave interferometry

ARTICLE IN PRESS
0963-8695/$ - se
doi:10.1016/j.nd
�CorrespondE-mail addr
NDT&E International 40 (2007) 208–214
www.elsevier.com/locate/ndteint
Static and dynamic testing of bridges through microwave interferometry
Massimiliano Pieraccinia,�, Filippo Parrinia, Matteo Fratinia, Carlo Atzenia,Paolo Spinellib, Michelangelo Michelonic
aDepartment of Electronics and Telecommunications, University of Florence, via Santa Marta 3, 50139 Florence, ItalybDepartment of Civil Engineering, University of Florence, via Santa Marta 3, 50139 Florence, Italy
cGPA Ingegneria srl, Viale della Repubblica 279, 59100 Prato, Italy
Received 20 July 2006; received in revised form 23 September 2006; accepted 9 October 2006
Available online 21 November 2006
Abstract
A novel microwave sensor capable of remote detection of structural displacements is experimented as geotechnical instrument for
static and dynamic testing of bridges. The sensor is based on an interferometric radar providing range imaging capability and sub-
millimetric accuracy range displacement measurement. Dynamic monitoring calls for sampling rate high enough for transient analysis,
while static monitoring requires long-term stability. The instrument has been designed in order to provide both these features. The results
of a validation campaign on a railway bridge during the final test before going into service are reported.
r 2006 Elsevier Ltd. All rights reserved.
Keywords: Radar; Remote sensing; Interferometry; Dynamic monitoring; Structural test
1. Introduction
Static and dynamic tests of bridges are routinely carriedout before going into service in order to validate structuralspecifications, or during their operation life, in order toprovide diagnostic surveys for planning rehabilitation,maintenance and repair.
Currently, static and dynamic tests are implemented byusing different equipments [1]. Static tests are performedusing a dumpy level, which optically detects the verticaldisplacement of targets positioned on the bridge. Dynamictests are usually implemented by networks of acceler-ometers installed on the structure. In both cases, theplacement of targets, or accelerometers, is the most timeconsuming and expensive operation, as monitoring of largestructures can require the use of costly scaffolding.Moreover, the installation of sensors can require to keepthe bridge out of service for a considerable time. That canbe a serious drawback if the structure supports a publicutility. Non-contact sensors have already been proposed inliterature. In 1999, Farrar [2] described a microwave sensor
e front matter r 2006 Elsevier Ltd. All rights reserved.
teint.2006.10.007
ing author. Tel.: +390554796273.
ess: [email protected] (M. Pieraccini).
without imaging capability for non-contact measurementsof vibration frequency in dynamic testing of structures.Static deformation of a variety of structures, such asconcrete girders in anechoic chamber [3], dams [4], bridges[5], and buildings [6] have been detected using ground-based synthetic aperture radar. While this techniqueoffered both imaging capability and displacement measure-ment, it was too slow to detect dynamic behavior.Recently, the authors designed and realized an inter-
ferometric radar able to provide images with sampling ratehigh enough to track the movements of architecturalstructures [7,8]. In this paper, the application of this novelinstrument to perform both static and dynamic testing ofbridges is described. The working principle, potential andissues are discussed with particular attention to theoperating conditions. Experimental results of a numberof validation tests on a just built railway bridge arereported.
2. The equipment
The equipment is based on a continuous-wave step-frequency radar [5–8], that transmits, step-by-step, con-tinuous waves at discrete frequency values, sampling a

ARTICLE IN PRESSM. Pieraccini et al. / NDT&E International 40 (2007) 208–214 209
bandwidth B at a constant interval Df. Proper processing ofthe CW echo signals provides images with resolution DR
given by
DR ¼c
2B(1)
with c speed of light.Because of frequency sampling, however, unambiguous
range measurement is obtained only provided that therange of targets does not exceed the maximum interval [9]
Rmax ¼c
2Df. (2)
Because of transceiver coherence, the images keep thephase information. Thus, two images acquired at differenttimes exhibit phase differences depending on the motion ofthe scatterers along the radar line-of-sight. The phase shiftDj of the pixel relative to a specific target in the scenario isrelated to its range displacement Dr, occurred in the timeelapsed between the two images, through the followingbasic relationship:
Dr ¼c
4pf c
Dj (3)
with fc the band center frequency.The interferometric sensor has been implemented as a
portable equipment powered by a battery pack and held bya tripod, as shown in Fig. 1. It radiates at 16.75GHz centerfrequency with 350MHz bandwidth, and is controlled viathe USB port of a common portable PC.
As the instrument has been designed for both static anddynamic testing, the electronics design must meet two typesof stringent requirements.
In dynamic testing the key feature is the speed ofacquisition. Large structures like buildings, bridges, towerscan have movements with typical vibration period nothigher than 100ms (10Hz) can be conservatively sampledat 30Hz. In order to keep a cautious value of about 1000mfor the unambiguous range (2), a sampling interval Df
lower than 150KHz is required, i.e. the number of
Fig. 1. Radar equipment.
frequencies sampling the above bandwidth should be aslarge as about 2500. Thus, to acquire images at 30Hz ratethe radar must be able to perform each CW acquisition inabout 13 ms. This is a challenging requirement that calls forspecific design solutions [7].On the other hand, static measurement requires long-
term phase stability. The duration of a test can extend fromtens of minutes to many hours, depending on theengineering issues. During this interval of time theinstrument has to maintain the signal coherence and mustnot exhibit phase shift comparable to that corresponding tothe expected accuracy (tenths of millimeter). This result hasbeen obtained by a high stability reference oscillator and aninternal calibration procedure [10]. It is to be noted that, asthe instrument operates in field using a battery pack, it isnot possible to provide long warm-up cycles, thus makingthe stability requirements harder to be achieved.
3. Geometry of bridge measurement
The typical measurement arrangement for both staticand dynamic testing of a bridge using the interferometricradar is sketched in Fig. 2. The instrument must bepositioned in an observation position allowing the lowerpart of the deck to be illuminated. This position is dictatedby the need of avoiding the radar echoes due to vehiclespassing on the upper deck. As the radar possesses onlyrange resolution, in order to image the bridge, every pointof the deck must be seen at different range. Theseconditions are usually fulfilled by placing the instrumentat the base of a pillar, as shown in Fig. 2. If the lowersurface of the deck presents discontinuities such as corners,crossbars, solders, bolts, these discontinuities act asscattering centers, producing peak echo responses. Mea-surement of bridge displacement is possible just incorrespondence of these scattering points, so they can beviewed as a sort of ‘‘virtual sensors’’ distributed along thestructure. As the expected displacement is along the verticaldirection (z), the effective displacement (Dz) is related tothe detected displacement (Dr) along the radar line-of-sightby the following relationship:
Dz ¼R
hDr (4)
with R the distance between the radar and the scatteringpoint, and h the deck height.It is to be outlined that this measurement technique
cannot work if the bridge has a complex shape, producing
Rh
Δz
ΔR
Fig. 2. Measurement geometry.

ARTICLE IN PRESSM. Pieraccini et al. / NDT&E International 40 (2007) 208–214210
multiple reflections that can make the radar image hard tounderstand, or if it is masked by extraneous reflectingobjects (trees, poles,y).
4. In-field measurement campaign
In order to test the capability and performances of theinterferometric sensor, a measurement campaign wasplanned on a railway bridge going in service.
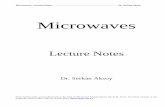
Fig. 3 shows an aerial picture of the bridge when it wasunder construction. It is a newly built twelve-arcadesstructure crossing the river Arno at Signa, near Florence,Italy. Only three of the twelve arcades actually cross theriver water: the other run on the almost flat ground of theriverbanks. All the arcades have been object of static anddynamic tests, by using trucks and locomotives as forcingloads. For the sake of brevity only a limited number ofsignificant measurements are reported here.
4.1. Static test
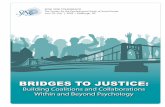
Fig. 4a shows the range radar image of an arcade 40mlong and 3.40m high, projected along the horizontal (x)
Fig. 4. (a) Radar image projected along the horizontal direction. (b)
Fig. 3. Aerial picture of bri
direction. The lower deck exhibits discontinuities likecrossbars and plates fixed with bolts, which give well-evident echo peaks in the radar response. By selecting apeak, the corresponding vertical displacement can bemeasured. Three locked locomotives, weighting on thewhole 400 tons, were employed as dead load: they arrivedat the center of the arcade, stayed there for about 6min,and after moved away. Fig. 4b plots the displacement vs.time of the point labeled with a circle in Fig 4a. Thispoint on the bridge lowered of 3.7mm during the statictest, and exhibited a residual displacement of 0.14mmdownward.
4.2. Dynamic test
Dynamic tests of bridges are routinely carried out beforegoing into service, in order to compare theoretical andmeasured natural frequency.In this specific case, the structures under test can be
associated to a scheme of simple supported beams asshown in Fig. 5a, and natural frequency can be calculatedby standard engineering formulas and tables [12]. By takinginto account that the lengths of the tested arcade are 35, 60
Plots the displacement vs. time of the point labeled with a circle.
dge under construction.

ARTICLE IN PRESSM. Pieraccini et al. / NDT&E International 40 (2007) 208–214 211
and 72.5m, the theoretical values of the natural frequenciesare, respectively 5.7, 2.3, and 1.8Hz.
Fig. 6a shows the range image of an arcade 72.5m longwith a deck 11.3m high, projected along the horizontaldirection. Also in this case the lower deck exhibitsdiscontinuities that act as scatterers, and a number ofpeaks can be selected for measurement of the correspond-ing points displacement. A truck of 48 tons was employedas dynamic load. Fig. 6b shows the displacement of thepoint selected in Fig. 6a. The natural frequency of thestructure is obtained by calculating the FFT of thedisplacement just after the passage. Fig. 6c shows theFFT over the time interval selected in Fig. 6b between thetwo bars. A natural frequency of 2.2Hz comes out clearlyevident. The same frequency value was obtained with other
Fig. 5. (a) Scheme of simple supported beam. (b) Bearings friction.
Fig. 6. (a) Radar image projected along the horizontal direction. (b) Displace
between the two bars.
arcades of the same length. The theoretically calculatedvalue is 1.8Hz. This light discrepancy is acceptable, takinginto account that the real structure is lightly different fromthe theoretic scheme, because of bearings friction andposition of the bridge axis. Moreover, the axis of bridge isnot aligned with bearings and its elevated position forms anarc. Consequently, the bridge behaves as an arc with twohinge, instead of a beam with an hinge and a support.In Fig. 5a is showed the theoretic approximation and inFig. 5b the real scheme for little displacements. For thisreason the bridge results more rigid than the theoreticscheme and the measured natural frequency is lightlyhigher than the theoretical value.
4.3. Mirror-mode measurement
Some of the twelve bridge arcades exhibit a very flat lowerdeck, as shown in Fig. 7. In this case, no scattering pointsalong the bridge are present, and the transmitted electro-magnetic wave is reflected by the flat surface as by a mirror.If the wave was reflected toward the river water or toward anuneven ground, no measurement would be possible. In thiscase study, however, most of the arcades cross the riverbank,consisting of an almost flat terrain devoid of vegetation.Thus, the reflected electromagnetic wave, impinging on theground, is back reflected by ground scatterers and received
ment of the point labeled with a circle and (c) FFT over the time interval

ARTICLE IN PRESSM. Pieraccini et al. / NDT&E International 40 (2007) 208–214212
by the sensor, as sketched in Fig. 8. In this case, themeasurement of bridge displacement is again possible: fromFig. 8 it can be seen that the ground scatterer appears at adistance 2R from the transmitter, and that the correspondingdisplacement Dr along the radar line-of-sight is twice thatmeasured in the case illustrated in Fig. 2. Thus, thedisplacement Dz of a point of the deck at distance R fromthe radar is given now by the following relationship:
Dz
Dr¼
1
2
R
h. (5)
Fig. 7. Picture of the upper deck suitable for ‘‘mirror-mode’’ operation.
Rh Δz
ΔRR
Fig. 8. ‘‘Mirror-mode’’ measurement geometry.
Fig. 9. (a) Radar image in mirror-mode projected along the horizontal direct
4.3.1. Mirror-mode static measurement
Fig. 9a shows the range image of an arcade 60m longprojected along the horizontal direction. The height of thedeck was 5.40m. Because the base of the pillar was notaccessible, the sensor was positioned at a distance of 15mfrom the pillar along the deck length. The lower deck iscompletely mirror-like, so that the peaks in Fig. 9a arerelative to ground reflecting discontinuities. The deadload consisted of three locomotives as in the previous test.Fig. 9b plots the displacements in time of the point labeledwith a circle in Fig. 9a, corresponding approximately to thedeck center. By taking into account Eq. (5), bridgelowering comes out 10.7mm, and a residual displacementof 0.20mm upward was measured. An independentmeasurement performed by a dumpy level gave a verticaldisplacement of 9.55mm.
4.3.2. Mirror-mode dynamic measurements
Fig. 10 shows the results of another measurement on adifferent arcade 60m long, performed in mirror modegeometry. A truck of 48 tons, proceeding forward andbackward along the deck, was employed as dynamic load.Fig. 10b shows the displacement vs. time of the pointselected in Fig. 10a. From the plot, it appears that theforward passage was faster than the backward. Bycalculating the FFT of the displacement just after theforward passage, a natural frequency of the structure wasestimated as 3.0Hz. The same frequency value wasobtained with other arcades of the same length. Mirror-mode dynamic measurement was carried out also on 35mlong arcades obtaining a measured natural frequency of5.7m.Table 1 resumes and compares the theoretical and
measured frequency values. The bridge appears more rigidwith respect to the theoretic model and measured naturalfrequencies are lightly higher than the theoretical values.Anyway, these light discrepancies are consistent with thediscussion reported in Section 4.2.
ion. (b) Plots the displacements in time of the point labeled with a circle.

ARTICLE IN PRESS
Fig. 10. (a) Radar image in mirror-mode projected along the horizontal direction (b) Displacement of the point selected with a circle and (c) FFT of the
displacement calculated over the time interval between the two bars.
Table 1
Theoretical and measured natural frequencies
Arcade length (m) Theoretical natural frequency (Hz) Measured natural frequency (Hz)
35 5.7 5.8
60 2.3 3.0
72.5 1.8 2.2
M. Pieraccini et al. / NDT&E International 40 (2007) 208–214 213
5. Discussion
When using radar interferometry, some word of cautionis in order.
The position of the equipment with respect to the bridgeis a key aspect for the success of this measurementtechnique. Extraneous targets (like trees, scaffolds,y)interposed between the sensor and the structure can beprejudicial for the measurement. Simply speaking: ‘‘theequipment can detect only what it sees properly.’’
A bit of radar practice is needed in recognizing the echoresponse of the deck points, particularly when thepreviously described mirror-like situation can occur.
It must be realized that the interferometric sensor is ableto detect only the component of the displacement along theradar line-of-sight direction, and is not able to detecttorsional effects of the structure.
A number of comparison measurements were performedon arcades of different lengths using the interferometer andthe dumpy level. The displacement values obtained by the
two techniques, listed in Table 2, show some discrepancies,which could be caused by the following reasons.First, it is not possible to detect the displacement
measured by radar and dumpy level at exactly the samepoint: the radar is able to perform measurements only incorrespondence of points producing peak responses ofsufficiently high SNR, as described above, and these pointsgenerally differ from the targets of the dumpy level.Another cause of discrepancy is the fact that it was notpossible to load symmetrically the deck: therefore, whilethe dumpy level measures the displacement on a side of thedeck, the radar measures a sort of average across the lowerdeck surface. This latter is probably the major cause of thediscrepancies. When taking into account these reasons, theresulting differences appear not surprising.
6. Conclusion
Microwave interferometry for static and dynamic testingof bridges appears a very attractive and promising tool for

ARTICLE IN PRESS
Table 2
Comparison between static displacement measured by radar and by dumpy level
Arcade length (m) Displacement measured by radar (mm) Displacement measured by dumpy level (mm) Load
60 10.7 9.55 Locomotives (400 ton)
35 2.80 1.90 Locomotives (400 ton)
72.5 15.00 12.85 Locomotives(400 ton)
60 8.60 6.55 Trucks (48 ton)
35 1.50 1.05 Trucks (48 ton)
72.5 11.00 9.85 Trucks (48 ton)
M. Pieraccini et al. / NDT&E International 40 (2007) 208–214214
a number of reasons: it performs a remote measurement,not requiring contact with the structure; the measuringtechnique is rapid and simple; the same portable instru-ment performs both the static and dynamic tests, it canoperate on in-service structures. Experimental tests con-ducted on a complex twelve-arcades railway bridge under anumber of different conditions have shown its capabilityand flexibility, and has evidenced its limitations as well.
Acknowledgments
The equipment used in this work has been designed andconstructed with the support of IDS—Ingegneria deiSistemi SpA, Pisa (Italy), and it remains the property ofthis company. The authors are grateful to SALFEF SpAthat kindly supported this experimentation.
References
[1] Shieh J, Huber JE, Fleck NA, Ashby MF. The selection of sensors.
Prog Mater Sci 2001;46:461–504.
[2] Farrar CR, Darling TW, Migliori A, Baker WE. Microwave
interferometers for non-contact vibration measurements on large
structures. Mech Syst Signal Process 1999;13:241–53.
[3] Tarchi D, Ohlmer E, Sieber A. Monitoring of structural changes by
radar interferometry. Res Nondestrut Evaluat 1997;9:213–25.
[4] Tarchi D, Rudolf H, Luzi G, Chiarantini L, Coppo P, Sieber AJ.
SAR interferometry for structural changes detection: a demonstra-
tion test on a dam. In: Proceedings of the international geo
science and remote sensing symposium (IGARSS’99), vol. 3, 1999.
p. 1522–4.
[5] Pieraccini M, Tarchi D, Rudolf H, Leva D, Luzi G, Atzeni C.
Interferometric radar for remote monitoring of building deforma-
tions. Electron Lett 2000;36:569–70.
[6] Pieraccini M, Luzi G, Mecatti D, Fratini M, Noferini L, Carissimi L,
et al. Remote sensing of building structural displacements using a
microwave interferometer with imaging capability. NDT&E Int
2004;37:545–50.
[7] Pieraccini M, Fratini M, Parrini F, Macaluso G, Atzeni C. High-
speed CW step-frequency coherent radar for dynamic monitoring of
civil engineering structures. Electron Lett 2004;40:907–8.
[8] Pieraccini M, Fratini M, Parrini F, Pinelli G, Atzeni C. Dynamic
survey of architectural heritage by high-speed microwave interfero-
metry. IEEE Geosci Remote Sens Lett 2005;2:28–30.
[9] Mensa DL. High resolution radar cross section imaging. Norwood,
MA: Artech House; 1991.
[10] Noferini L, Pieraccini M, Mecatti D, Luzi G, Atzeni C, Tamburini A,
et al. Permanent scatterers analysis for atmospheric correction in
ground based SAR interferometry. IEEE Trans Geosci Remote Sens
2005;43:1459–71.
[12] Clough R, Penzien J. Dynamics of structures. 2nd ed. CSI
Publication.