
SECTION A - Rotational Kinematics and Dynamics
27
WARNINC: These r.e AP Phvsics C Frec R€sponse Prrctice Use wilh caution! SECTION A - Torque and Statics 2008N42. The horizonlal uniform rod shown above has length 0.60 m and mass 2.0 kg. The left end ofihe rod is anachedto a venical suppo( by a ftictionless hinge that allowsthe rod 10 swing up or down. The right end of rhe rod is supponed by a cord lhal makes an angle of30'with the rcd. A spring scale ofnegligible mass measures the tension in rhe cord. A 0.50 kg block is aho attached to lhe righl end ofthe rod. a. On lhe diagram below, draw and label vectors lo represenl allthe forces acting on lhe rod. Show each force vecLor originaring al il< point ofapplicarion. -t b- Calculate the rcading on the spring scale. The rotational ineniaofa rod about its cenrer is Dl M,l-r, where Mis rhe massofthe rodandZ is its lengrh. c. Calculate the rolational inenia oflhe rod-block syslem about the hinge. d- Ifthe cord that supports the rod is cut near the end of$e rod calculale the inilialangular acc€lemtion oflhe rod-block sysrem about the hinge. SECTION B - Rotational Kinematics and Dynamics -d! ll 1973M3. A ballofmass m is attached by two strings to a veflical rod. as shown above. The enlire system rotates al constant angular velocity (r) about the axis ofthe rod. a. Assuming o is large enough to keep both strings taut, find lhe force each string exerts on the ballin terms ofo, m. g, R, and 0. b. Find the minimum angular velocity, 0r.i" for *hich rhe lower sl ng barcly remains taut. o.50 l!
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of SECTION A - Rotational Kinematics and Dynamics

WARNINC: These r.e AP Phvsics C Frec R€sponse Prrctice Use wilh caution!
SECTION A - Torque and Statics
2008N42. The horizonlal uniform rod shown above has length 0.60 m and mass 2.0 kg. The left end ofihe rod is
anachedto a venical suppo( by a ftictionless hinge that allowsthe rod 10 swing up or down. The right end ofrhe rod is supponed by a cord lhal makes an angle of30'with the rcd. A spring scale ofnegligible mass
measures the tension in rhe cord. A 0.50 kg block is aho attached to lhe righl end ofthe rod.a. On lhe diagram below, draw and label vectors lo represenl allthe forces acting on lhe rod. Show each force
vecLor originaring al il< point ofapplicarion.
-t
b- Calculate the rcading on the spring scale.
The rotational ineniaofa rod about its cenrer is Dl M,l-r, where Mis rhe massofthe rodandZ is its lengrh.
c. Calculate the rolational inenia oflhe rod-block syslem about the hinge.d- Ifthe cord that supports the rod is cut near the end of$e rod calculale the inilialangular acc€lemtion oflhe
rod-block sysrem about the hinge.
SECTION B - Rotational Kinematics and Dynamics
-d!
ll1973M3. A ballofmass m is attached by two strings to a veflical rod. as shown above. The enlire system rotates al
constant angular velocity (r) about the axis ofthe rod.
a. Assuming o is large enough to keep both strings taut, find lhe force each string exerts on the ballin terms ofo,m. g, R, and 0.
b. Find the minimum angular velocity, 0r.i" for *hich rhe lower sl ng barcly remains taut.
o.50 l!
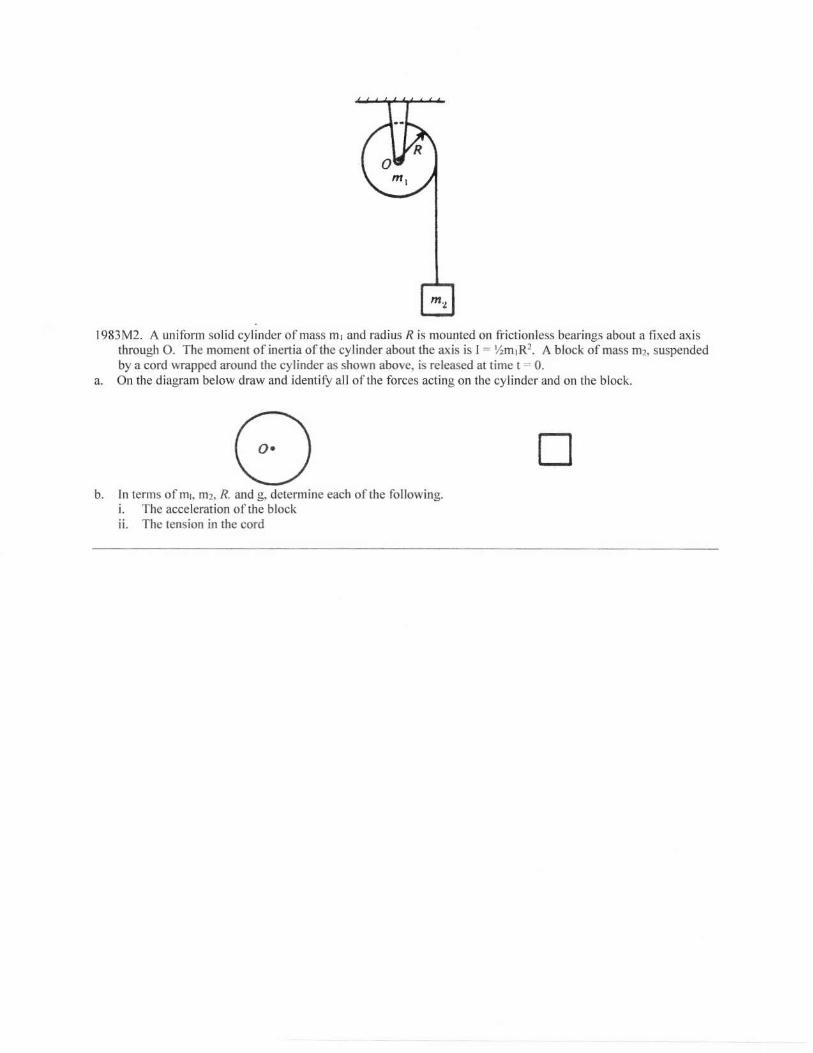
1983M2. A uniform solid cyl;nder ofmass m, and radius R is mounted on frictionless bearinss about a tixert axislhrough O. Th€ moment ofinenia oflhc cylind€r about the axis is I 7:mrR:. A block ofmass m!. suspendedby a cord wrappcd around the cylinder as shown abovc, is released al time t 0.
a. On the diagram below draw and identily allofthe forces acting on the cylinder and on the block.
b. ln terms ofmr, mr, R and g, dcrermine each ofrhe following.i. The acceleration olthe blockii. The lension in lhe cord

/),
\)
1988M3.-Ihetwouniformdisksshownabovehaveequalmass,andeachcanrolat€onfiictionlessbcaringsaboutafixed axis lhrough i$ center- The smaller disk has a radius R and momcnt of inertia I about ils axis. The largcr
disk has a radius 2Ra. Determine the moment ofinertia ofthe larger disk abou! ils axis in terms ofl.
The 1\ro disks are then linked as shown below by a lighi chain thal cannot slip. They are at r€st wh€n. at time t =0. a srudent applies a torque to the smallerdisk. and il rotates counterclockwise with constant angular
acceleration a. Assume that the mass ofthe chain and lhc t€nsion in the lower part ofthe chain. are negligible.
ln terms ofl. R, cr, and t. determine each ofthe lollowingl
The angular accelemtion ofthe larger diskThc lcnsion in the upper partofthe chain'I he torque that the student applied to the smaller disk'lhe rolational kinetic energy ofth€ smaller disk as a tunction oftime
b.
d.

I
i1-
V/l99lM2. Two masses. mr and m2 are comected by lighl cables to the perimeters oflwo cylind€R ofradii rr and t,
respeclively. as shown in the diagrdm above. The cylinders arc rigidly connected to each other but are ftee to
rotate with;ut fiiclion on a common a\le. The moment of inenia ofthe pair ofcylinders is I = 45 kg'mz
Also rr :0.5 meler. r2: 1.5 meters, and mr = 20 kilograms.a. Determine mr such that the system will remain in equilibrium.
The mass mi is removed and the system is released from rest.
b. Deiermine the angular acceleration ofthe cylinders.c. Determine lhe lension in the cable supporling mrd. Determine the linear speed of m I at the time it has descended 1.0 meter.
Horizontal
following:The angular acceleration ofthe rod about the axisThe translational acceleration olthe center of mass ofthe rod'l he force exened on rhe end o[rhe rod by the arh
The rod rotates about th€ aris and swings down from the horizontal position.
Determine thc anSular velociiy ofthe rod as a tunction of 4 the arbitrary angle through which lhe rod has
slrlung.
F--t1993M3. A long, uniform rod ofmass rtr' and length rs supported at the left end by a horizontala\is into lhe page
and p€rpendicular lo lhe rod, as shown above. The righl end is connecled to the ceiling by s thin veaical thread
.o lhar the rod is horizonlal. The rnomeni ofin€nia ofthe rod about the axis at lhe eod ofihe rod is M/'?B.
Express the answers to all parts ofthis queslion in te r'sofM.4andg.a. Determine rh€ magnitude and direction ofthe force exerled on the rod by the a-\;s.
The thread is ihen bumed by a match. Forthe time imm€diately after the thread breaks, determine each ofthe
b.
d.

2000M3. A pulley ofradius Rr and rotat;onal inertia l is mounted on an a)(le with negligible liiction. A ligbt cordpassing overthe pulley has two blocks ofmass m atlached to eitherend, as shown above. Assume that the cord
does not slip on the pulley. Determine the answers to parts a. and b. in terms ofm, R1,,/r, and fundamentai
a. Delermine the tension T in the cord.b. One block is now removed lrom the right and hung on the left. When thc system is released liom rest, the three
blocks on the lefl accelerate downward with an acceleration g/3 . Determine the following.i. The tension T3 in the section of cord supporting the three blocks on the Ieftii. Thc iension Tr in the section of cord supporting the singlc block on the righti;i. The rotational inertia /r ofthe pulley
The blocks arc now removed atld the cord is tied into a loop, which ;s passed around the original pulley and a
second pulley ofradius 2Rr and rotational inertia l6lr. The axis ofthe original pulley is attached to a motor that
rotates it a! angularspeed or, which in turn causes the la.ger pulley to.otate. The loop does not slip on the
pulleys- Determine the following in terms oflr, Rr, and ori. The angular speed or ofthe larger pulleyii. The angularmomentum L: ofthe larger pulleyiii. The total kinetic energy of the system
€&

2003M3. Some physics students build a catapult. as shown above. The supporting platlorm is fixed firmly to iheground. The projectile. ofmass l0 kg, is placed in cup / at one end offte rctating arm. A counterweighrbucket B lhai is to be loaded with various masses greater than I 0 kg is located aI the other end of the arm. Thearm is released from the horizontal position. show, irl FiAUre l. and be8ins rotating. Tlere is a mechanism (notshown)thd stops the arm in the venical position, allowingthe projecrile lo be launched viih a horizonralvelocity as shown in Figure 2.
a. The students load five ditlerent masses in the counterwe;ght bucket, release the catapult, and measure theresulting distalce x traveled by the l0 kq Droieciile, recor dine rhe folld\ i
Mass (kq) I 100 300 500 700 900.r(m) I 18 37 ,15 ,18 5I
i. 'lhe data are plollcd on the axes below. Sketch a best-fit curve fbr thcse data points.
:(x) 60t1 ti00Mass (kg)
ii. Using your best-fit curve, determinc lhc distance.r taveled by rhe projectile il250 kg is placed in thecounterue;ghr bucker.The students assume tllal the mass ofthe rotating arm. the cup, and the counterweight bucke! can be neglected.With this assumption, rhey devclop a theorerical model for x as a function ofthe counrerweighr mass using therelarionship.r = v.,, where v, is the horizontal velociry ofthe projectile as it leaves the cup and r is the rime afterIaunch.i. How many seconds after leavingthe cup will the projeclile slrike lhe ground?ii. D€rive rhe equation that describes rhe gmvirarional polenrial energy ofthe system relarive to the groundwhcn in the position shown in Figure l, assuming the mass in the counterweight bucket is M.iii. Derive the equation for the velocity oflhe projectile as it leaves the cup, as shown in Figure 2-i- Compl€le lfte theorelical modelby wrilingthe relationship fori as a fuocrion oflhe couoterweight massusins the resuhs from b. iand b. iii.ii. Compare rhe experimentaland theoreticalvalues ofx for a counterweight bucket mass of300 kg. Offer areason for any difference.
da1a.
^30"20
t00
b.
I-t-H
=l -T-- --T-- -T--t--
50
10
t0

SECTION C - Rolling
Q.-''
I974M2- The momenr ofinertia ofa uniform solid sphere (mass M. radius R) about a diameter is 2MR:/5. The
spherc is placed on an inclined plane (angle €) as shown abovc and released from rest.
a. Der€rmine the minimum coefllcient offriction I between the sphere and plane with which the sphere will rolldown lhe incline without slipping
b. lf! rrere zero. would the speed ofthe sphere at the bottom be grealer. smaller. or the same as in parl a.?Explain your answer.
b. Determine th€ linear acceleration a oflhe centerofthe cylinder.c. Calculare the angu lar acce lerarion o ofthe cylinder.d. Your results should show that a and sR are not equal. lixplain.
1977M2. A uniform cylinderofmass M. and radius R is init;ally at resl on a rough horizontal slrface. Themoment ofinenia ofa cylinder about its axis is /2MR:. A strinS, which is wrapped around the cylindcr. is
pulled upwards with a force T whose magnitude is 0.6M9 and whose dnection is maintained vertically upwardat all times. In consequence, the €ylind€r bolh accelerates horizonolly and slips. Th€ coelTicient ofkineticfriction is 0.5.
a. On the diagram below. dmw vectors that represent each ofthe forces acting on the cylinder id€ntiry and clearlylabel each force.
1980M3. A billiard ballhas mass M, radius R. and moment ofinenia about the center ofmass I, = 2 MRj/5The ball is s.ruck by a cue stick along a horizontal line through the ball's center ofmass so that the ball initiallyslides with a velocity v" as shown above. As the ball moves across the rough billiard table (coefficient ofslidingfriclion Fr). its motion gradually chanees frcm pure translation through rolling with slippinglo rolling withoutslipping.
a. Develop an expression for ihe linear velocity v of the center of th€ ball as a function of time while it is rollingwiih slipping.
b. Develop an expression for the angular velocity o oflhe ballas a function oftime while il is rolling wirhslippinS.
c. Derermine the time at which the ball begins to roll wilhoul slipping.d. When lhe ball is struck it acquires an angular momentum about the fixed point P on the surfac€ ofthe table.
During the subsequent motion the angular momentum about poinl P remains coflstant despite the frictioMlforce. Explain why this is so.

b.
Nots Diagmm not drawn Io scalc.
I 994M2. A large sphere rolls without slipping across a horizontal surface. The sphere h6 a conslant tEnslalionalspeed of l0 meters per second, a mass m of25 kilograms, and a radius r of0.2 meter. The moment ofineniaofthe sphere about its cent€r ofmass is I = 2mfl5. Th€ sphere approaches a25'incline ofheight 3 meters as
shown above and roUs up th€ incline without slipping.Calculate the total kinetic energy ofthe sphere as it rolls along the horizontal surface.i. Calculate the magnitude ofthe sphere's velocity j nst as it leaves the top ofthe incline.ii. Specify the direction ofthe sphere's velocityjust as it leaves the top oithe incline.Neglecling air resistance, calculate the horizontal distance liom the point wher€ the sphere leaves the incline tothe poinl where rhe sphere strikes the level surface.Suppose. instead,lhatthe sphere were lo roll loward the incline as staled above. but the incline were frictionless.State whether the spe€d ofthe spherejusl as il leaves the lop ofthe incline would be less than, equal to, orgrear€r than the speed calculated in b. Explain briefly.
Sin 25'= 0.42Cos 5o = 0.91Tan 25" = O.41
Derermine the mnslarional spe€d ofthe cylinder when it reaches rhe bottom ofthe inclined plane.On the figure below. draw and labelthe forc€s acting on the cylinderas it rolls down the inclined plane Yourarrow should begin at the point ofapplication ofeach force.
d.
1997M3. A solid cylinderwith mass M, radius R, and rotational inertia /:MR: rolls without slipping down theinclined plane shown above. The cylinder starts liom rest at aheight H- The inclined plane makes an angle 0lvith rhe horizonlal. Express all solutions in terms of l\4, R, H, 0, and g.
b.
d.
Show rhat the accelemtion oflhe center ofmass ofthe cylind€r while it is rollinS down thc inclined plane is(2/3)g sirl6.Determine the minimum coeflicient ofliictioo belwcen the cylinder and the inclined planc that is required forthe cylinder to roll without slipping.fie coefficient of fiiction r is now made lcss than lhe value delermined in pan d.. so that lhe cylind€r both
i. Indicate whetherthe trdnslational speed ofthe cylinder at the bonom ofthe inclined plane is greater than.lessthan, or equalio the translational speed calculated in part a. J usl ify your answer.ii. lndicate wherherthe total kinetic ener$/ ofthe cylind€ratthc bottom oflhe inclined plane is grearer rhan,less ihan, orequaltothe lotalkinetic energy tor the previous case of rolling without slipping. Jusliry your
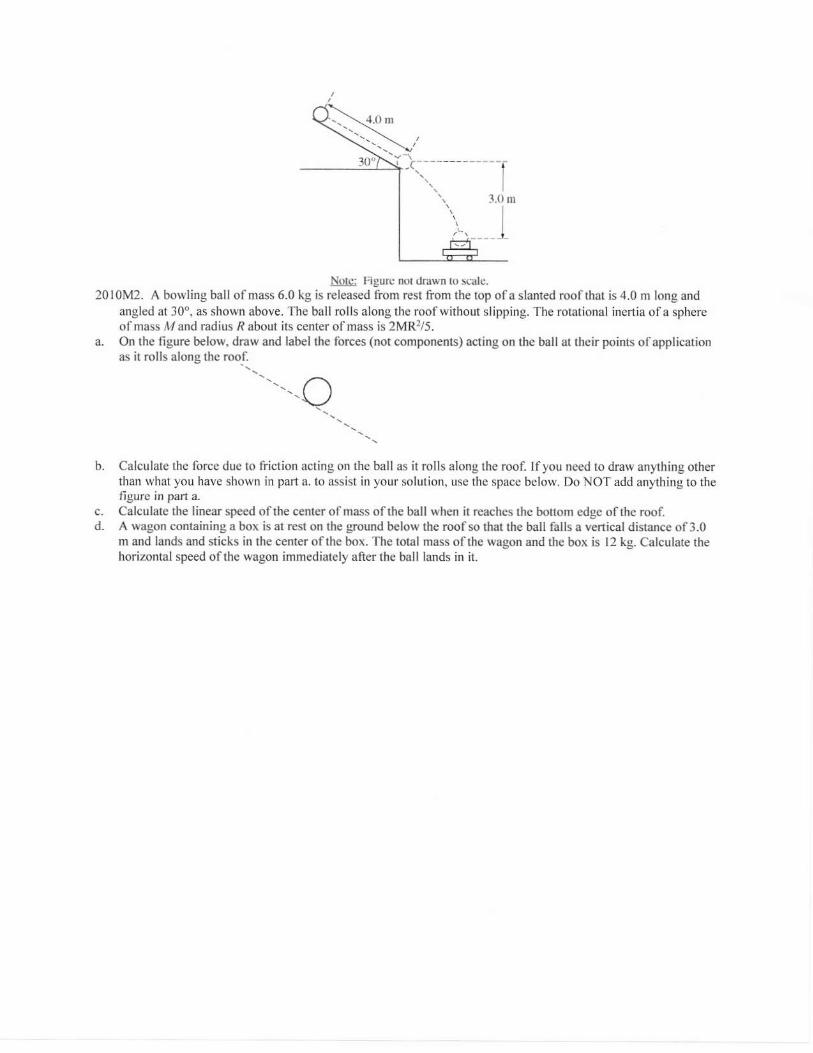
tj!!:i tsi8urc rot (lrasn to *alc.2010M2. A bowling ballotmass 6.0 kg is released ftom rest Iiom lhe top ofa slanted roofthat is 4.0 m long and
angled at 30'. as shown above. The ball rolls along the roofwithout slipping. The rotalional inertia ofa sphereofmass Mand radius R aboul its ceoterofmass is 2MR?/5.
a. On the tigure below, draw and labelthe forces (not components) acting on the ballal lheirpoints ofapplicationas it rolls alongthe roof.
b. Calculate the for€e due to friction acring on the ball as it rolls along the roof. Ifyou need to draw anything otherthan what you have shown in part a. to assht in your solution, use lhe space below. Do NOT add anythingio the
Calculate the linear speed of.he cenler of mass ofthe ball when i( reaches the bottom edge ofthe rootA wagon containing a box is at rest on the gound below the roofso that the ball falls a venical distance of3.0m and lands and sticks in the center ofthe box. The rolal mass ofthe wagon and rhe box is 12 kg. Calculate thehorizontal spe€d ofthe wagon immediately affer the ball lands in it.
()
d.

IL
PI-1
11' fl
1r-. "ilj-r -.- -llht__-
Iters Flcf nb, -
Fieure II: Allcr
l98lM3. A thin, uniform rod of mass Mrand length L, is jnitiallyalrestona liictionless horizontal surface. The
moment ofinertia ofthe rod about its centerofmass is MrL'z/l2. As shown in Figure I, the rod is struckal pointP by a mass m, whose initial velocity v is perpendicular to the rod. After the collision, mass mr has velocily
-7:v as shown in Figure I I. Answer the following in t€rms of the slmbols given.a. Using rhe principle ofcooservation oflinear momenlum. delermine the velociiy v' ofthe center ofmass ofthis
rod after the collision.b- Usingrhe principle ofconservalion ofangular momentum, detennine the angular velocily o ofthe rod about ils
cenler ofmass after the collision.c- Determine the change in kinetic energy ofthe system resulting fiom the collision.
1982M3. A system consists oflwo small disk, ofmass€s m and 2m, attached to a rod ofnegligible mass of lenglh3/ as shown above. The rod is ft€e to tum aboul a venical axis through point P. The 1wo dkks resl on a roughhorizonral surtuce: lhe coefUcienl of fi-iction betw€en the dhks and the surlacc is !L At time t = 0. thc rod has an
inilial counterclockwise angular velociiy oo about P. Thc system is gradually brought to rest by liiction.Dclelop expressions tbr the following quantities in tcrms ofll m. /. g. and o,,
a. The inirial angular momentum oflhe sy$em aboul lhe a-\is through P
b. Thc fridional torque acting on rhe system abour lhe aris through P
c. Thc lime I at which lhe sysrem will come to rest.
2.-Br---

1992M2.'lwoidenticalspheres,eachofmassMandnegligiblendius,arefastenedtooppositeendsofaFodofnegligible m.ss and length 2l This system is initi6lly at rest with the rod horizonral, as sholyn above. and isftee lo rotale about a fiictionless, horizontal axis lhrough thc center ofthe rod and perpendicular to lhe plane oflhe page. A bug, ofmass 3M, lands gently on the sphere oo lhe left- Assume thal the size oflhe bug is smallcompared to the length oflhe rod- Express your answers lo all parts ofthe question in terms of M, /, and
B"8H3M
Delermine the torque about the axk immediately alier lhe bug lands on the sphere.Delermine ihe angular acceleration oflhe rod-sphercs-bug system immediatety after rhe bug landsb.
d.
The rod-spheres-bug system swings about the axis. At the instanl that rhe rod is vertical, as shown above,determine each of the following.The angular speed of the bugThe angular momentum ofthe systenThe maqnitude and direction ofthe force that must be exerted on the bug by the sphere to keep the bug fiombeing lhrown offthe sphere

t998M2. A space shuttle asFonaut in a circular orbit around the Eanh has an ass€mbly €onsisting oftwo smalldense spheres, each of mass m, whose centers are connected by a rigid rod of length / and negligible mass. Theaslronau( also hasa device thal willlaunch a small lumpofclay ofmass m at speed vo. Express your answersin terms ofm. vo /. and fundamenial conslants,
F- r ---.1,llHn
lIlDoI
?a. lnitially. $e assembly is "floating" freely al rest relative lo the cabin, and the aslronaut launcheslhe clay lump
so thal it perpendicularly slrikes and sticks to the midpoint ofthe rod, as shown above.i- Determine the toral kinetic energy oflhe system (assembly and clay lump) afterthe collision.ii. Deremine the chanSe in kiner;c energy as a resul! oflhe collision.
F-e-__lmlHn
lI
laoI
o
b. The assembly is brought to res! the clay lump removed, and the experiment is repeated as shown above, withthe clay lump siriking perpendicularto the rod but this time stickingto one ofthe spheres ofthe assembly.i. Determine the distance from the left end oflhe rod to the center ofmass ofthe system (assembly and claylump) immediately aturthe collision. (Assumethal fie rddii ofthe spheres and clay lump are much smallerthan the sepamtion ofthe spheres.)
ii. On the figure above, indicate the direclion ofthe motion ofrhe center ofmass immedialely after rhecollision.
iii. Determine ihe speed ofthe center ofmass immediately after the collision.
iv. Determine lhe angular speed of.he sysrem (assembly ad cl.y lunp) imm€diately aftcrthe collision.
v. Determine the change in kinetic energy as a result ofthe collision.
NM$TAT'IETTiI5unrmary: When an object rotates, the rotation obeys rules similar tothose of a moving object. Most equalions .1nd concepts have analoguesfor rotation. Whereas mass describes an object's resistance to a changein speed, rotational inertra describes an objecl's resistance to a changein rotational speed. Rotational inertia depends on mass as well as on thedistribution of that mass.
D€finitionsO Centripetal acceleration is the name given to an object's acceleration
toward the center o{ a circle. "Centripetal" simply means "toward the
O Torque occurs when a Iorce applied to an object could cause the objectto rotate.
O lhe lever arm for a force is the closest distance from the fulcrum, pivot,or axis of rotation to the line on which that force acts-
O Everything covered in the previous review chapters is sufficient todescribe "translational" motion. When an object rotates around a cen-tral point, or when an object is itself rotating as it moves, then we needsome additional concepts. Just know that each of these rotational quan-tities is not truly new. Each rotational quantity should be treated exactlythe same way as its translational analogue: for example, if you knowhow to deal with linear momentum, then angular momentum applies thesame ideas to rotating obj€cts.
123
CHAPTER

124 STEP 4. Review the Knowledge You Need to Score High
The ball rolling down rhc tamp in rhe pleceding ffgure has tmnslational kinetic ener'ry because
ir is moving Ir also has lotational kineric energr because it is spinning Thc ball is losing gravi-
tational encrry becausc ir is changing its vertical height; that los ofporential enerry is corrverrcd
into a gain in kineric €ncrgy b€c1use no nonconservative forces act on rhe ba.ll.
Circular MotionExample 1: A car ofmass I,000 kg travcls at consont specd around a flar cuwe
rhat has a radius ofcurvarure of 100 m. 'l hc car is going as fast as it can go
wirhour skiddinB.
Does this car havc au accelerarion? lMry ycs, it does, even drorgh it moves at constant
speed. ls acc.eleration along ia dircctiou of moriotr is zcro, because dre cal isn't speeding
up or slowirrg down. Llowener, its directioo of rnotion is always drangin& acceleration is
rechnically thc change in an object's vector urloriy cach second, ancl a change in rhc direc-
tion ofmotion is a charge in velocity.
FACT: IVhen an objecr moves in a circle, it has an acceleration directed toward dre
ccnter ofthe circlc. The amount ofthat acceleration is
Strateg: When an obiect is moving in a cilcle, often a standard Newron's second law
approach is corecr- Draw a free-body diagram, and rhen writc {," = rza in each direcrion.Draw a free-body diagram ofthis car as it movcs. Iis most useful ro vicw this car from
behind; leis say the caL is turnirrg to the righr, so that drc center ofthe circular motion rs
in the place indicated.
(Cenler ol cncular molion)

Rotation 125
'l'he forces are as followsr
Fr is rhc normai force ofthe roed on rhc car.
Waiglr is the lorce of the Ealth on drc car.
Fl is the fricrional forcc ofthe road on rhe car.
Wait, why is friction acting to the right? Shouldn't friction act opposite the direction
Ah. There cenainly could be fiicrion or air drag acting backwards, opposite the direc-tion ofmorion; b(r wi.h rhe car nroving at constanr speed, thrr would have ro be canceled
bv a forward enginc force.r Sincc wc know thc car moves at constant speed, thais probablynor particularly relevant ro rhe problcm.
\7heu a car gocs arourrd a flat curve, somc sorr of force must act toward the ccn€lof rhc circle-otherwise, thc centriperal acceleration couldn'r cxist. How do we know it'sfriction in this case? lmrgine the car were movilg folward on a slick, flat shcct oficc. Thecar couldn't go around a curve at all, thent turning the whccls would do norhing. On an
asphalt road, iis the static fLictional force of rhe asphalt on the tircs thar pushes rhe cer
toward thc cerrter of rlre circle.No matter wlrat kincl ofquestion yoJre asked abour rhis sitrration, drc next srep is
to usc Newron's second law il both the verLical and horizonral dilecions. Vertically,rhr car's rccelerarion is zeLo; dre car isn'L bunowiug ioro rhe road or liFting off theroad. llorizontaill,, we don'r hiv€ * rrumcr!cal vahrc foL rlre uccclcLation, but we lcnowirs cquarion: 1:
F, -ueight. 0
The firsr equatioo tclls us drat rhe normal lbrce on rhe car is equal ro rhe car's weightof 10,000 N. In order to calculare the liicrion force oD rhc car, we'd need to hnow oue oftwo pieces ofadditional informarion. On one hand, if we know the car's spced, wc can use
the sccond cquation to calculatc fi. On rhe orher hand, sincc we know the normal force,if we knew the coelTicienr of sratic friction berween rhc car's tircs and the road. wc couldcalculate the fricrion forcc r$ing 4= 1r{,.
Sratgr.. You cannot allow yoursclf ro becomc angry or frLrstrared when you don't have
enough information to complcrc a calculation. Som€rimcs, an AP Physics I problem willbe deliberately coococted ro ask, "\(hat additional informarion would you need ro solverhis problem?" (Remembcr, actual calculation on rhe exam will be rare.) Or, ofren, some
secmingly necessary inlormation witlbe omirted, becausc it will curn out that rhe omittedinformation k irrclevanr.
For example, an cxcellent problem usirrg rhis sirLration might zor give rhc mass ofthecar bur insread givc the cais spced and ask whar minimum coemcient offriction would bcnccessary for rhe ca, to round the curvc. Pretend, say, thar rhc car's spced is 20 m/s.
rT{hni.rllr tis would bc r fo!.c ol srin iicion bcnrc(i,hcLnts )d duo!.I, but ilnr\ l diffocnr dayi ksdi.

126 STEP 4. Revlew the Knowledge You Need to Score High
I can't do that. I need the mass to calculate the force of friction
Well, truc, ifyou needed a valuc fot the lorce of friction, but rhat's not ihc qucstion.\fle wanr rhe coefEcient offriction.
Yeah, I know. The eqr.ration is Ft=pF.. I need the mass to calculale ihe friction force,
andsince the normalforce is equal to the weight, I need the rnass to calculate that,too. This isn't possible.
Vhen you're srr.rck with a calculation that you rhink needs a valuc that wasn't givcn,
try just making up that value. It's likcly that the unknown value will cancel out. Or, ifyouwant to be more elegant, assign a variable to the unknown value.
Ler rhc mass bc z. 'fhe equarions w€ wrote from thc flce-body diagram show that thefricriorr force is rzf . The normal forcc is rhe weight of the car, or the car's mass times thegravitational field g of l0 Nlkg. Now use rhe equadon for fricrion force:
F,= PF"
__= p (ng)/
Look at thai solvc fol p, and the nrassel cancel. You can plug in thc 20-mls speed andthe 100-m radius to get p = o.4, A car of an! mass can go around this curve, as long as thccocfffcient offricrion is at lcasr 0.4.2
FACT: Th€ rorqre tprovided by a fdrce i-s given by the equation
I write the syrnbol "I" by rhe / ro crnphasizc drat the disrance we want is the perpen-
dicular distance from the line of rhe foLce to the fulcnLm.r Usually that's an easy distancc
to visualize.
':That mak s p.{ftr *n!.<wr s rlos y.llow igs wxniry of th..?popir. spccd tor EoitrE.bud r apciThqi'Et ey, Curc:40mpn."Theye(.isl)r/o,ieysn.ihinE3illylilc Cure: go l0 mph fo!.6y t00ls in
'€u. Ehi.L.'
)Th. "tulcrun" i! tht point ahout whid!.n obkc, rco6. or ould oh.c.
Torque
€

Rotation 127
\0hat ifa force isn't acting pcrpendiculat to an extendcd object, like the force Fon the
pivoted bar that followsi
Example 2:
The easiesr way to find the torque applied by this force is to break the (orce ,F intovcrrical and horizontal componenrs.
The vertical component offapplies a torque of (Fsin d)r- The horizontel componentof lc does not apply any torque, kcause it could not cause the bar to rotatc. The toraltorque provided by the force Fis just (Anr o).n
Lever ArmThis distance 4 is somerimcs rtfcrrcd to as rhe "level arm" for a force. By definition, thelever arm lor a force is rhe closesr distance frorn the fulcrum to the line on which tlutforce acts.
An alternate methorl ofdetcrmining dre rorque applicd by dre force in Example 2 wouldbc to find thc lever arm insread ofbreaking l? inro components. Extcnd the linc ofrhe force
in rhe diagLem-now it's easy to label the lever arm as rhe closest distance fro,n the pivot rothc line of the force. By trigonometry, you can figure out thar rh€ lcver arm distance is cqual
to lsin 0. No matrer how you look at it, then, the torque provided by -Fis still (.6in @x.
Calculations with TorqueYou may bc asked to calculate a force or a torque whcn arr extended objecr experiences
multiple fotces, bur gencrally only *hen drar object is in equilibrium-chat is, when upforces equal down forces, left forccs equal right forces, and counterclockwise torques equalclockwise torques.
Example 3: Bob is standing on a bridge. The bridge itselfweighs 10,000 N. Thcspan between pillars /4 and B is 80 m. Bob, whosc mass is 100 kg, srands 20 mfrom the center ofthe bridge as shown.
-..E- - 5
,y t_,_ 1

128 STEP 4. Review the Knowledge You Need to Score High
Generally, a problem with a bridge, plank, or some sort ofextended object will ask youto describe or solve for rlre forccs supponing rhe bridge. The approach is to make a list ofrorqucs acting in each direction, clockwise and counterclockwise, and then set the counter-clockwise torqucs equal to the clockwise torques.
Aarrgh. Where's the {ulcrum? This bridge isn't rotating anywherel
Exactly. Since dre bridSe is not acrually rorAting, you can choosc anywhere you likeas rh€ fulcrum. lt's easiest in this case, ro choose olc of thc supports as the fulcrum,because rhen rhar support provides zero torquc, and the lever arm for that forcc would
LeCs choose supportl as the fulsum. What torqucs do we seel
1hc firce ol Supporr R (l'll call it .4J provides a torque equal to ,lr(80 m), bccause
srrpport B is B0 rn 6onr support A. 'l'his totgue is countarlockuisr, because pushiog up ondre bri.lgc pivoted At.ul woulcl romre the bridgc rlris way U.
'l'hc weighr of tlob provides a cloclrwisc torrlLre ol (1,000 NX20 m) = 20,000 m N.(Ve don't usc 100 ltg, becaust' thais a mass, lot a force; thc force xcrirg on rhe bridge is
due to l},rb's rveight.)
Exam Tip from an AP Physics VeteranIn a torque problem with a heavy extended object, jusr pretend that rhe obicct's weighiis all h ar rhc obiect's centcr ofmass.
The 10,000-N weight of the bLidge itsclfprovides a torque. Pretcnd rhar all 10,000 Nacr ar rhe cenr€r ofthe bridge, 50 m away from each support. A weight pulling down at
the bridge's center would tend to rotate thc bridge clockwise. The torque we wanr herc $(10.000 N)(50 m) = 500,000 m N, dockwise.
Now, ser countercloclorise torques equal to clockwise torques:
Fs(80 m) = 26,669 * 51 + 500,000 m.N
Solve for Fs to get 5,300 N. This is reasonablc bccausc pillar B is suppolting Lg rhan
halfofthe 1I,000-N wcight ofthc bridge and Bob. Because Bob is closer to pillar.4, and
orherrise rhe bridge is symmetric,l should bear rhe maioriry ofthe weight-and it docs.
Rotational KinematicsAn object's'iotational spced" says how fast the object rotares-that k, how many degrecs
or radians it roraces rhrough per sccond. Rotarional speecl is generally given by rhe low-ercase Greek variablc omega, @. Ar objccr's "rotational acceleration" o describes howmuch rhe rotational speed changes in one second. The variablc 0 represents the rotal angle
through which an object rotates in some tinrc pcriod.

Just like position x, spced z, and accelcration z ale rclated through the kineoratics fol-mulas givcn in Chaptcr l, rorational angle, spced, and accelcration arc related by che same
I q=( + ctt
2. 69= @ot + \af3. @i = q)1 + 2d.L0
It is highly unlikely thac you'll be asked to actually rnake much of a calcularion wirhthese €quadons. Rather, you might be asked to rank rorating objccs by their angular speed
or accclemdon; or you might be askcd, "Is it posible ro calculate...." 'l hc gcneral approachto a calculation should be identical ro that for nonrotatioml kinemaricsr Make a chart withthe ffve variables in it. Ifyou can idcntifi a valuc for three ofthc five variables, the problemis solvable.
Rotational lnertiaJusr like "inertia" refers to an objecr's abiliry to rcsisr changes in irs morion, "rotarionalincrria"a rcfcrs ro an object's ability to rcsist clranges in is rotational motion. Two rhingsaffect an objecr's abiliLy ro resist lotarional morion changes: rlrc objecCs rnass and how faraway rhat mass is from thc cclrcr ofrotation.
'l'lrcrc are thlee ways ro figure out sonrerhing's lorarion.l inerriel
1. Fol a singlc "ponrt" parti.le rhx. is nroving ir a circle around an mis, irs rorationalirrertia is given by the eqlition,a=,rtr. Herc, ,n is renassolrheparricle,andristhr Laclius of the circle.
2. For an objecr with somc Lind ofsn'ucrurc, likc a spinning ball, a disk, or a rod, a
fonnula for its rotational inertia will generally be givcn ifyou need ir.3. For a sysrcm consisting ofseveral objccrs, you can add rogedrcr. thc rotarional incrtia
of each of rhe objccts ro find rhe total rotational inerria of a systcm.
Example 4: Three metet-long, uniform 200-9 bals each havc a snmll 200-9 mass
arached to them it thc positions shown in thc &agram. A person grips drc barsin the locarions shown and attcmprs to rorate thc bars in the directions shown.
Rotation 129
Onp -
"lh(APPhysici l, Alseba-Br*l1$ will ahurs u{ dr. krn rordio'Dlnrnii. ua llr RpE$nrtl L,y rhc r irbl.r Mrn/ kxttdb.hJ tcichcR willu* rlt old.r r.rm -monEtrrofiD.iri:i o Ei.r k, fi.snr.qnxi.ie Doit lx oofn.Nl,
c",.f)
T\,

130 STEP 4. Review the Knowledge You Need to Score High
It's possible that you mighc be xked to calculare rhe ror'rrional inertia ofone of rhese
grippe.l'rodr. Ifsn, in the pr'oblen, sraremenr yol d bt given the formula to calculate the
i.otniional inertio of" rodi trut' when pivoted in the center, and ]MZ? when pivoted
At the end.' You know ihat thc rctetional inertia of the smail mass is zrr, wherc / is the
distaace from the mass ro the griP. In eadr situation' add the rotational inerria ofthe rod
m the rotational in€r.ia of the small mass'
For Grip A, the rod's rorarional inert:ra \s \MIJ =\(0 2 Lg)(1 nr'= 0 067 kg m''
The small mass conributes nothing to the rotationnl incrtia, because it is not rotating the
t terrt in I = ml is zeto. Thus, the total rotational inerria is 0'067 kg m2
For Grip B, the rod is pivoted in the center, so its rorarional inenia is r,l Ml = 0 017 kg m'?'
The smal{ mass isn't rotaiing. So rhc roml rorrrional intrtia i' just 0'017 kg mr'
Filalty, for Grip C, the rod's rorationJ lnerria is iMlr = i(0'2IgXl m)'z= 0'067 k mz'
'lhe smalL mass's rotarional inenia is (0.2 kg)(i m)'?= 0.20 kg m'?. Thus, thc totai rotational
inertia is the sum ofboth contributions, 0.27 kg m'].
Calculations aren'r usually the point, drough This situarion is jusr begging to become
a rarking task: witl,out any specific values for the masses ol length' 'frhe items trnk the
grips byiheir rotatiooal inenla As long as wc hnow that thesmall mass is equalto the rnass
ifit'. ioa, und tt "r
the rods are equal in length, then thc ranking can be done' You can
see rhar the small rrxss cortributes rothing to dre rotational inertia in A and B withour
calcularion.You can see that Gtip A providcs x Srearer rourrional ineltia dran Gtip B' eut wbl-
ort hno ing th?fot ulat lMt antl r; Mt) l{cason fiorn the properries of al object rhat
cootrihure to its rotational inertia: nxss' and how faL rvay that Ln:rss is fiorn the axis oflotation. l hc r:ods havc rhe sarrre nrass in A rnd B. But Rod A has ntrch morc mass thet is
faL awry lroni rhc grip; Rod B has nrole mass closcr to the grip ' 'l hcrtfb Le, Rod B wlll bc
easier to rotatc, and Ilod A will have morc rr-rtrtional ineLrir'
Then, of coursc, Crip (i combires tlte 'worsi' of both woLlds: just the rod bv itsclf
provides the same lotatiolnl irerria as iu GriP A, brLt the nass is aho courributing ro the
iorrtional ircLtia. The ffnal ranking would be 1. > -L > 1s.6
Newton's Second Law for Rotation
Jusr ns lircar accelerarion is caused by a net force, angtlar ^ccele
tion is caused by a ner
Only the ner rorque can cause an angular acceleration lf more than one lorce is applynrg a
rorque, then use th"..rm7 ofrhe torques to hnd the angular acceleration
!H.r., Z rp's.ns tlE lenstir olrhe b .
iokan you z/, n.c.l ro set comlinxbl. \vith thn sor 6lvdrld erPhndon of'orePs thar retlr o 'quriions
fd f:'h! dorsit nNkc dirtcr olcuhdon livdo t.c.Dn6.d on isso*dlplobhn n n okav ro rnake uP vllu€r for whatevd
y", uerl, u,] .,ltuLue. I dodt at.ll &onmo mcmo'i,ins ill llr dita"t lidulI lir roRtionrl nt(h of" rod
spherc, hoop dGk, eE, But illo!hiPftn L. r.nd'rhe' rhtm, iit flnc to usc rcLn.
roi il dre iollu.s i,t ictnrg irl oPPosite dn .doni, Ne tlie diiilreNc.

Rotation 131
Example 5: A turntable ofknown mass and radius is attached to e motol th:rr pro-vides a known torque. Using the rorque ofthe motor and the rotational incrriaofthe turntable in Newton's second law for roration, thcn, using romrionalkinematics, a student predicts that it should take !.0 s for rhe turntable to spccdup from rest to its maximum rotational speed. \yhcn rhe smdenr mcasures thenecessrry time, though, he dhcovers rhat ir rrkes 6.8 s to reach maximum rota-tional speed.
First, you should be able ro describe how to perform such a measuremenr in yourlaboratory. -fhere's
a bazillion ways ofdoing so: rhe idca is ro make many mcasurementsof rotarional spced until that rorational speed docsn't change. Rorarional specJ could bemeasured with a video camera and a prctractor, by runDing rhe vidco frarne-by-frame tosee how many degrees the rurnrablc advances per frame. Or tape a tiny piccc ofpaper rothc edge of the turntable, and have that paper trigger a fcw photogatesi you can mcasurethe angle beween the photogares, and the photogatcs will tell you how nruch time it rookfor rhe turntable to rraverse rhat anglc.
This problem is s€fting up for you to figure out why the predicrion didn't rnatchrhe mcasurcment.s The mosr obvious issue is that the torque provided by rlrc rnorormight nor 6c the ,.t rorquc on rhe rurntable. l:ricrion in rhe bcarings of rhe turntablccould easily provide a toque in the opposite dircction ro rhar prov;ded by rhe motor.Thus, the real value for ner torquc will be /arzrr tharr the value rhc srudenr used. Arrd, byt^, - Id, lrc Lcal angulaL acrelerati<-rn will bc lowcL; tinally, by ro, = a4 t cr, r snrallcrangulal a<:eleration to 8et ro rl)e sanre final specd rne.rns rhar the rimc I will be longerthar prcrlicterl.
Angular Momentum-fhe rotatiolal analogue of dre impLrlse -momenmrrr theorcrn irvolves rorquc aurl algularmomcrrtum rather than f'orce ald linear mom€nrum:
Here z is rhe net rorque acting on an object, and Ar is rhe rime during which rhar rorclucacts. Th€ change in the object's angular momentum is AZ.
An objecis angular momentum can be calculated using rhree methods:
l. For a single "point" particlc thar is movinB in a cncle around an a-ris, its angularmomcorum is given by L = ,nur. Herc, r represenls thc radius of rhar circlc.
2. For a single "point" parriclc rhat is moving in a srtaight line,t irs angular rnornentumis also given by Z = rzar; but in dris case rrcpresents rhc'distancc ofcloscsr approach"
8P,.e dorl aurcoriiallyny"hun2n cmi" TlrEl no $ct tlin8 A "huhrn.rnr,",nd u,i,)g rlur phE* i! l,aft,lly.n {ro@tic drt on d. AP lkn.
t^ngoL. hon.nbm mus.,luys bc dcfir.d wnh Eper o y,m( ctrrd uis ot romrior tlr rN$ n&rin8 {,h,c.s,th.r dis is obvioui. For . pafiiclc mNidg in . nnighr linc, yr,tr h.v€ io $y whrr pdnion yonic al. hlrB iog{lrr nDmdrum aoi bu'
'h. pIri.l.tr {i[ hJr ]n8uh nn,mdn rn
1 32 I STEP 4. Review the Knowledge You Need to Score High
from the line of the paniclet motion ro the position abour which angular momen_
tum is calculated, as shown bclow.
l--*--'------------'i,
3. For an exrended objecr with known rorational inertia .I, angular momcntum is given
by L= Ia.
For most problems, you can rdrson by analogy to the iinear impulse-momentumrh.orem. Just as a force applied for some time *,ill change an object's linear momentum, a
torque applied foL som€ time will change an objcct's angular nromcntum, Just as the area
under a force versus time graph givcs the change in an object's linear momentum, thc arca
undcr a torque vc$us timc gtaph givcs the change in an object's angular momentum.
Conservation of Angular MomentumFACT: In any sysrem in which dre ouly torques acring are b€nveen objeds in fiat
sysrem, angular momentum is conserved.'fhis effectively means that angular
rnornentunr is conserved in a//collisiorrs, bLrt also ir numerous other situations.
Example 6: A unifonn rod is at resc on a flicrionless table- A ball ofputry, whosc
rnass is h.rl[that ofrhe rod, is moving to the left, as shown. The ball ofpur.ycollides with and sticks to dre rod.
r.uin'orcon'ac'\r) "-l|rc;
il
Exam Tip from an AP Physics VeteranUsually, the fulcnrm or axis of rotation is obvious. But when arr object is not forced
to pivot at some specific position, if it rolates ir will most likely rotate abour irs centero[mass.
Srari wirh whar quanthies are conserwed for the putry-rod sysrem. It's a collision, in rvhich
the only forces involved are the force of the putry-on-rod and rod-on-putry. Thcrefore,
linsr momen(um is conscrvcd. Similarly, the putty applies a torque ro rhe rod beceuse itpushes on rhe rod ar a posirion away from its cenrer ofmass. But rhe only torques involvedare provided by objects iD the system, so .rngular momentum is also conscrved-
$
Rotation : 133
This collision cannot be elasric because the purq/ sticLs to the rod; so kinctic energy
was not conserued. Mechanical cncrgy was also nor conserved because the kinetic cnergy ofrhe purrywas not stored as potential cnergy in a spring or gravitational lield. Ofcourse, thesum of a// forms of enetgy was conserved, because whatever kinetic enetgy was lost by theputty+od system was converted to microscopic intcrnal energr, and thus thc tempetaturcof dre putry-rod will incrcase.
\Yhere\ the cetter of masti Using the equation from Chaptcr I 2, call ). = 0 thc top ofthe rod. Prerend the rod is l-m long and I kg in mass. Then rhe putty is 0.5 kg in mass. So
ry,,, (0) + n*d (0.5 m) = n,.a @,,").'u Pluggtng in rhe masses, you ger r = 0.33 m.
But the problem emphatically did not say that the rod was 1-m long.
Right. riVharever the rod's length, its center of mas is one-rhird ofrhe way down the rod.
Exam Tip trom an AP Physics Veteran\flhen you're askcd about ihe cenier of mass speed, you can ignore all angular stuff. Inrhar case, jusr treat the collision as ifthese were cars collidi
Again, you can make up va|.res to ffnd the speed of the center- of ma$s after colli-sion. If the putty's ilitial speed wete 1 m/s, thcn the total momenrum bcfotc collision is0.5 N.s. By conseLvariol of mornentum, drat's also the roral momcnrum after collision,brrt rhe mass of dre cornbnred objecrs afrer collision is 1.5 kg. 'fhe spccd of drc ccnter ofmass worrld be 0.33 m/s. Rut since the initial spced wasn't given, you can only dcffnitivelysay rhat the speed of dre centel of rnass aftcr collisiol will be one-rhird of thc spced ofthepurry before collision.
Conservation of Angr,rlar Momentum Without Collisions
FACT: Angular momcntum is conserved aoy tim€ an obiect, or system of obiects,experiences no De! torque,
Exampl€ 7: A person sta[ds on e frictionless turotable. She and the tumtable are
spinning et one levolution every two seconds,
Sure, the person can wigglc and encrt a rorque on rhe urnable. But this torquc is inter.nal ro rhe pcron-turntable systcm. Thc pcrson thus cannot change the angular momcntumof the person-tutntable system.
This doesn't mean that shc can't changc her angular specd. '{flhat ifshe throws hcr arrns
way out away from her bodylrr Hcr rotetional inenia would change, bccausc she'd have
the samc total mass but morc of that mass would be fer away from the centcr of rotalion.Hcr angular momentum cant changc. By 1- = 1o, to Leep a constant Z with e bigger I theargular speed ra must decrcase. This is rhc physical basis for how figure skete$ carr controltheh spinning.
r0ltt (0.5 m) beus tu cqtr{ olflN orrh.,od b, iklimus, b. h:l6vq, dowo rhc 'od.L]AP r.adft M.ft Sclolor luitc r.N,mbly *lc, Aris sh. $owi the fiEt aiin, w[$ plr ol llr body do6 shi k to
rlMo\r rnc orh.t irml'' leiluPs I $ould my rhc .xtordr" hs ain*.
L
re $

134 STEP 4. Review the Knowledge You Need to Score High
Example 8r A planet orbits a sun in an elliptical orbit.
You won't havc ro dcal with elliptical orbits in the sensc of making calculations, orusing Kepler's l-aws and Physics C-stvle calculations. But you can understand that angularmomentuD of a plarret orbirillg a sun must be conserved. Since rhe force of the sun ona plancr is always on a linc roward the sun irself, rhis force cannor provide any torquc-there s no levcr arm. lIith no torque exerted on a planer, rhar planet cannot change itsAngular momentunl. Trear rhe planet as a poinr parri€le; irs angular mom enr$n is L= mut,whcre ris rhe distance from rhe sun. \(/henever /is big a must be small to kcep Z consranr.'fhe firthel away rhe planet is from che sun, the slower ir moves.
FACT: \7hen an objccr h rctaring, its rotational kinetic energy is
Rotational Kinetic Energy
In Example 6, drc puny-rod sysrem has both rorational andlinear kinetic energy afterthe collision. Thc rotal kinctic cnergy is then the sun of%zrl, where u is the speed oftheccntcr ofmass, plus thc rotationxl kincric euergy.
Vhcn an objecr rcrrres, rhc work,ener$, dreoren srill applies. 1'he kincric errrgytenrrs each inclrrclc the addition oflorational and lineaL kiletic energy. In Example 6, workis clone by a Donconservarive fbrcc (rhe forcc of rlre r.od on the putry). To ffnd out howmuch work was donc, ser ty\c = AK.L + APE, This simariorr doesn'r involve a spLing or achanging vercical heighr, so APr= 0.'the kineric cnelgy was originally just hmi fot rheputty; after the collision, rhe kinetic energy is as discussed in thc previous paragraph, rhcspeed of the centcr of mass plus the rotarional kinetic energy,
Yd

Rotation 135
Practice Problems
l. A uniform wooden block has a mass zr. On it isrcsting halfofan identical block, as shown above.The blocla are supported by rwo table legs, as
(a) Vhich rable leg, if enher shotrld provide alrrger forcc on rhe borrom block? AnswcL wichspccilic refercrrce ro thc rorque c(lrralion.
(b) ln tenns of givcn variables and fundrmentalconsranrs, whar is rhe force of r[e riglrt-lrandtable leg on thc bottonr rnass?
-0.6m-*. tC
A smalj ball of rnass m moving on a fricriontcsshorizontal surfrre is anached ro a Lubbcr brndwhose other eld is fixed at poinr P. Thc ballmoves along the doned line in rhc pre.eding
ffgure, srretching the rubbet band. \X,4ren ir pxsesPoinrl, hs velociry is z directed as shown.
(a) Is the arrgular momenrum of thc ball abourPoinr Pconserved bcrwecn posirions A and Bi
(b) Is rhe linear momenrum of thc ball conscnedberwecn posirions A arrd B?
(c) Describe a sysrem in this problem for whichmechanical energy is conserved as the ballrnoves from A to B.
(d) Explain why rhe net force on rhe ball at pointB is not 6Si.
A smooth, solid ball is released fiom resr from thetop ofan incline, whose,urface is vcry rough.'l heball rolls dowrr rhe incltne wirhour slipping.
(a) Describe in words rhc enelgy convcxion lorrhe ball lrom its rele.rsc until ir rraclres theborronr of the ioclile.
(b) Explanr rvhy lvorl< done by thc flicrion folccshould uor bc irclde(l iu dre encrgy conser.vr(iull s(,Ir mrnr ill ].rrr {.r). cveo rhough rlresuria(c ot rhc i/r.Lnc is rough.() ls 'h. r,rc,lr,r,i(al ...'g) ol 4,. b"tt-t,,,t,syrrcm conservad durino irs rollr
(J) lhis b.'I is ..phred by I ne* bafl, whos sur.face and nars are idenrical to rhe firsr ball, burwhich is pndonrirranrly hollow insidc. Desclibeany differences in irs roll down rhe incline with-out dipping, wifi cxplicit refcrcnce to lorms ofenerry.
3.
';l1.0m
It."-J'--'
B
Solutions to Practice Problems
r. (") Call rhc lbre of rhc lefi supporr F1. arrd rheforce of rhe right supporr F1,. Consider rhemiddlc of the bottom block as the fulcrum."l'hen one dockwise torque acts: Fr.(I,r2). lwocounrerclockwirc torqLrcs acr, rhough: .r1.{l,2)and ttlz)n.llli)l . The poinr i, thar if youhave to add somerhing ro the rorque providedby rhe righr supporr ro ger rlre rorquc providrdby rhe lefr suppon, rhc lefr ,uppon rius provides mo'e rorque. Because Lhe )upporrs rrcthe same distancc ltom the ccnter; the lefL sup-port provides nrore forcc, roo.
(b) You cerrainly could use rhc reasoning inPart (a) with the fulcrum in rhe cenrer,along wirh rhe roral suppot force equal,int I.5.M( (vertical equilibrium of forccs).However, it's rtruch easicr mathetrarically tojust call the left end ofthe rod rhe firlcrum.Thcn the counrerr lockwlse (orqu€ i, FR.1.'fhe cloclrwisc rorqut is It2)ng \Ll4) -rz3 (I/2). Set rhesc equrl an,l pley with rhefiactions to get F*=(*+ilnC=inS.
.il]

136
2. (a)
STEP 4. Review the Knowledge You Need to Score High
Angular nronrentum is corrservcd when oo
torqucs exrernal to the systcm acr. Here che
sysrcrn is just the ball.Thc only force actiugonthc ball is the rubber band, which is attached
to Point P, The force applicd by the rubberband cani ha.,c any lever arm with rcspccr roPand thus provides no torque abour point P,
so dre Lulli rngulAr rnomcntum abour point2 cant change. Angular momenrum is con-servcd,Lincar momentum is conserued whcn rroforccs external ro rhe sysrcm xct. Here thesysrem is ju\r rhe ball. The rubber band is
extcural to thc sysrem and applies a force;
tlrcrefoie, iinear mofircntunr is zal conserved.Mechanicrl energy is conservcd when no forccextclnal ro thc system docs work. Thc lubberb.,nd docs \,"ork oD rtrc b.rll. Lec.rus. r ;ppliesa fbrcc and strerchcs in a dircction parallcl torhc Folce it prodrrces. ConsideL thc mbberband palt of rhe systcnr. Tlre post ar Point 1'still applies r forcc to rhc ball. +ubbeL tanrlsystcnr, brrt sincc rhe posr tloesrit movc, rharforce doer rro !vo,.t( on rtre tr.i ..r,l,l,e, bar(rsystcm. Arrv kinr:tic enerly lost Ly the ball rvillbc stored as elasrn encqy irr dre nrbLcr h,rrrd.
T|e mcchtuicd cncrgy of drc hall-,,trbbcrband systenr is conserved.
The gencr.rl fomr ofthis equA(ion is llne -rhcball's path at l'oiut P is, ar lcasr in the ncigh-bolhood ol 4 approxirnately circular Theball expcriences a centripetal accelerrtion atPoint B, and ccntlipetal acceleration is l/eThe problcm is rhar if the r rerm is L0 m,rhen rhe , term must represclt the specd atPoinr B. Virh angular momentum conserved,
the total ofmar rnusr always be the samc. Thcball's mass doesnt change. 'Ihc distance r fromPoint ? gcts bigger from ,4 to 8, so thc speed
musr get smaller. 'l-he equarion given uscs thegivcn variablc z which rcprcsenrs rhc speed ofthe ball at Poinrl, oor rhe sp€cd ar B, and so
is invalid.
3, (a) Gravitational energy nr rhe top (bccause rhe
ball is some verricrl hcight above its lowcstposition) is convcrtctl to both rotational andrranslarionrl kinetic energy ar rhc Lrorrom-rotational because rhe ball wiil be spinning,and mnslational bccause tire ballt ccnter ofmass will movc down the inclinc.Tirc ball Lolls wirhout dipping. The Force ofrhe very rough surface orr the ball is tangenrro rhe ball's surface, bur the ball'.s surface ncverslips parallel ro rhis forc€.'V/ork is force (im€s
displacemenr parallel ro rhc force. It'.s the forceof rtntic fuiction rhar nrust be acring on rheball, and since sraric fricrion doesni move rheball's sLrrhcc, the displacement term is 7!ro,and static friction can do no work.Mechanical encrgy is conscrved when no uon-.onscrvxlivc forces acr. Hcre rhe Errrlri gravi.rational field can givc rhe ball ftinetic encrgy,but since thc Harrh is parr o[ rhe systcm andsincc tLe gravitational firce is couservative,rl'ir {r;ll Jllnw' lor cor,'erv,rriorr of meclrrnical eoerq,,,. lrricriotr is a nonconservative forre,but lrcrc finrion docs no work.l'hc hollow ball ot Lhe sanrc rn:rss will hav.gre,rrer ror:rrior"l rrrelrir lleraure rhe rn;sr is
conccntrute.l tirrlo liom rhe ccnrer of o*tion. "I'he balli gLaviratiolal energy bcfole rherclling bcgins is the sam. ff rhe previous sce-
flario, because dre lrcighr of dre inclinc is thesame. The toral kinetic encrgy at thc botrorrwill nor change; rhe qlcsrioo is how much ofthat kinetic energy will be rotational, and howmuch will bc translational.
Rorarional KE is '/:Ial; the angull spccd ardepends on rhc rnnslational speed z. (The fasterrhe ball is nroving, rhe more itt roating, roo.)'fhercfore, rorarional kinedc cnergy dependson L Tianshtional kineric cnergy also depcndson I in dre form,ia Vzntj. Thc hollow ballhar bigger /. 'l'he speed z musr b€ lower for rhehollow bail so thet V2loj + thni adds to tbesame rdrc for borh balts.
(b)
(1,)
G)(c)
(,1)
kl)

Rotation 137
Rapid Review. en an object moves in a circle, it has an acceleration directed toward the center ofthe
circle. The amount oi rhat acceleration is ;.. The torque rprovided by a force is given by rhe equarion ?= FlL,
. In any system in which the only rorques acting are between objects in thar system,angular momentum is conserved. This effeccively meaus rhat angular momertum isconserved in a//colihions, but also in numerous orher situations.
" Angular momentum is conservecl any time an object, or sptem ofobjects, experieoces
. \vten an obj€ct is roraring, its rorational Lineic energy is 1,hlti.




















