
Seabed segmentation using optimized statistics of sonar textures
22
IEEE Proof IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008 1 Seabed Segmentation Using Optimized Statistics of Sonar Textures 1 2 Imen Karoui, Ronan Fablet, Jean-Marc Boucher, Member, IEEE, and Jean-Marie Augustin 3 Abstract—In this paper, we propose and compare two super- 4 vised algorithms for the segmentation of textured sonar images, 5 with respect to seafloor types. We characterize seafloors by a set of 6 empirical distributions estimated on texture responses to a set of 7 different filters. Moreover, we introduce a novel similarity measure 8 between sonar textures in this feature space. Our similarity mea- 9 sure is defined as a weighted sum of Kullback–Leibler divergences 10 between texture features. The weight setting is twofold. First, 11 each filter is weighted according to its discrimination power: The 12 computation of these weights are issued from a margin maxi- 13 mization criterion. Second, an additional weight, evaluated as an 14 angular distance between the incidence angles of the compared 15 texture samples, is considered to take into account sonar-image 16 acquisition process that leads to a variability of the backscattered 17 value and of the texture aspect with the incidence-angle range. 18 A Bayesian framework is used in the first algorithm where the 19 conditional likelihoods are expressed using the proposed similarity 20 measure between local pixel statistics and the seafloor prototype 21 statistics. The second method is based on a variational framework 22 as the minimization of a region-based functional that involves the 23 similarity between global-region texture-based statistics and the 24 predefined prototypes. 25 Index Terms—Active regions, angular backscattering, feature 26 selection, level sets, maximum marginal probability (MMP), seg- 27 mentation, sonar images, texture. 28 I. I NTRODUCTION 29 A COUSTIC remote sensing, such as high-resolution multi- 30 beam and sidescan sonars, provides new means for in situ 31 observation of the seabed. The characterization of these high- 32 resolution sonar images is important for a number of practical 33 applications such as marine geology, commercial fishing, off- 34 shore oil prospecting, and drilling [1]–[4]. 35 The segmentation and the classification of sonar images with 36 respect to seafloor types (rocks, mud, sand, ...) is the key 37 goal behind the analysis of these acoustic images. This task, 38 however, raises two major difficulties. The first task is to deal 39 with texture in these images. Previous methods are generally 40 based only on backscattered (BS) intensity models, and several 41 parametric families of probabilistic distribution functions have 42 Manuscript received January 4, 2008; revised May 20, 2008 and August 11, 2008. I. Karoui, R. Fablet, and J.-M. Boucher are with the Department of Signal and Communications, École Nationale Supérieure des Télécommunications de Bretagne, 29238 Brest Cedex 3, France (e-mail: [email protected]). J.-M. Augustin is with the Department of Acoustics and Seismics, Institut Français de Recherche et d’Exploitation de la Mer, 29280 Brest, France. Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TGRS.2008.2006362 Fig. 1. Typical sidscan sonar image (Rebent, IFREMER). Fig. 2. BS evolution with the incidence angles for the three seafloor types of Fig. 1: sand, mud, and sand ripples. been suggested (Rayleigh distribution, K distribution, Weibull 43 distribution, etc.) [3]–[8]. These first-order statistics are not 44 sufficient when high-resolution sonar images involve textures, 45 which is the case of most sonar images (Fig. 1). 46 The other important issue arising in seabed texture charac- 47 terization is a built-in feature of sonar observation: The value 48 of BS measure depends both on the seafloor type and on the 49 incident angle of the reflected acoustic signal, ranging typically 50 from −85 ◦ to +85 ◦ . Fig. 2 shows the BS evolution for three 51 different seafloor types: sand, sand ripples, and mud. In addition 52 to the BS variability within incidence angles, seafloor textures 53 0196-2892/$25.00 © 2008 IEEE
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of Seabed segmentation using optimized statistics of sonar textures

IEEE
Proo
f
IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008 1
Seabed Segmentation Using Optimized Statisticsof Sonar Textures
1
2
Imen Karoui, Ronan Fablet, Jean-Marc Boucher, Member, IEEE, and Jean-Marie Augustin3
Abstract—In this paper, we propose and compare two super-4vised algorithms for the segmentation of textured sonar images,5with respect to seafloor types. We characterize seafloors by a set of6empirical distributions estimated on texture responses to a set of7different filters. Moreover, we introduce a novel similarity measure8between sonar textures in this feature space. Our similarity mea-9sure is defined as a weighted sum of Kullback–Leibler divergences10between texture features. The weight setting is twofold. First,11each filter is weighted according to its discrimination power: The12computation of these weights are issued from a margin maxi-13mization criterion. Second, an additional weight, evaluated as an14angular distance between the incidence angles of the compared15texture samples, is considered to take into account sonar-image16acquisition process that leads to a variability of the backscattered17value and of the texture aspect with the incidence-angle range.18A Bayesian framework is used in the first algorithm where the19conditional likelihoods are expressed using the proposed similarity20measure between local pixel statistics and the seafloor prototype21statistics. The second method is based on a variational framework22as the minimization of a region-based functional that involves the23similarity between global-region texture-based statistics and the24predefined prototypes.25
Index Terms—Active regions, angular backscattering, feature26selection, level sets, maximum marginal probability (MMP), seg-27mentation, sonar images, texture.28
I. INTRODUCTION29
ACOUSTIC remote sensing, such as high-resolution multi-30
beam and sidescan sonars, provides new means for in situ31
observation of the seabed. The characterization of these high-32
resolution sonar images is important for a number of practical33
applications such as marine geology, commercial fishing, off-34
shore oil prospecting, and drilling [1]–[4].35
The segmentation and the classification of sonar images with36
respect to seafloor types (rocks, mud, sand, . . .) is the key37
goal behind the analysis of these acoustic images. This task,38
however, raises two major difficulties. The first task is to deal39
with texture in these images. Previous methods are generally40
based only on backscattered (BS) intensity models, and several41
parametric families of probabilistic distribution functions have42
Manuscript received January 4, 2008; revised May 20, 2008 andAugust 11, 2008.
I. Karoui, R. Fablet, and J.-M. Boucher are with the Department of Signaland Communications, École Nationale Supérieure des Télécommunications deBretagne, 29238 Brest Cedex 3, France (e-mail: [email protected]).
J.-M. Augustin is with the Department of Acoustics and Seismics, InstitutFrançais de Recherche et d’Exploitation de la Mer, 29280 Brest, France.
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TGRS.2008.2006362
Fig. 1. Typical sidscan sonar image (Rebent, IFREMER).
Fig. 2. BS evolution with the incidence angles for the three seafloor types ofFig. 1: sand, mud, and sand ripples.
been suggested (Rayleigh distribution, K distribution, Weibull 43
distribution, etc.) [3]–[8]. These first-order statistics are not 44
sufficient when high-resolution sonar images involve textures, 45
which is the case of most sonar images (Fig. 1). 46
The other important issue arising in seabed texture charac- 47
terization is a built-in feature of sonar observation: The value 48
of BS measure depends both on the seafloor type and on the 49
incident angle of the reflected acoustic signal, ranging typically 50
from −85◦ to +85◦. Fig. 2 shows the BS evolution for three 51
different seafloor types: sand, sand ripples, and mud. In addition 52
to the BS variability within incidence angles, seafloor textures 53
0196-2892/$25.00 © 2008 IEEE

IEEE
Proo
f
2 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
Fig. 3. Sonar image composed of sand ripples. (Left) [5◦, 40◦].(Right) [80◦, 85◦].
are dependent on the incidence angles. Figs. 3 and 4 show a54
sonar image composed by sand ripples and rocks, respectively,55
for two angular sectors: [80◦, 85◦] and [5◦, 40◦]. The texture56
of sand ripples shows a loss of contrast in the specular sec-57
tor [5◦, 40◦]: The steep grazing angle reduces the backscatter58
differences between facing and trailing slopes, while at low59
incidence angles, much of the variation is lost due to increasing60
sonar shadow. A similar loss of contrast is observable in the61
rock samples (Fig. 4). BS behavior according to the incidence62
angles has been of wide interest for sonar imaging [3], [9]–[12].63
Parametric and nonparametric techniques have been proposed64
to model sonar-image behavior with respect to the incidence65
angle variations. The effect of the incidence angle on the BS66
has also been explored as a discriminating feature for seafloor67
recognition [4], [13], [14]. However, no studies have proposed68
a method to accurately compensate this phenomena because69
of the joint dependence of the seafloor types and on the local70
bathymetry which is generally unknown for sidescan sonar71
images. To our knowledge, the effects of the incidence angle on72
textured seabed features have not been addressed for segmen-73
tation issues. Only some studies were interested in simulating74
the behavior of oriented and textured seafloor types [15]–[18].75
These methods are mainly based on shape-from-shading [19]76
and were restricted to synthetic images or to real sonar images77
involving only one seafloor type.78
In this paper, we aim at using texture information within79
sonar seabed images and at developing segmentation algo-80
rithms that take into account angular variability of BS and81
textural features. We propose to characterize seafloors by a82
wide set of marginal distributions of their filter responses, and83
we measure seafloor similarities according to a weighted sum84
of Kullback–Leibler divergences [28] in this feature space.85
To cope with seafloor angular dependence, we introduce an86
additional weighting factor, evaluated as an angular distance87
between the compared texture samples: This angular distance88
is measured according to Gaussian kernels, whose variance89
sets the level of the angular variability, depending on textures90
and seafloor types. The proposed incidence-angle-and-texture-91
based similarity measure is exploited to develop two different92
Fig. 4. Rock texture for two angular sectors. (Left) [5◦, 40◦].(Right) [80◦, 85◦].
segmentation schemes. We first state the segmentation issue 93
as a Bayesian pixel-based labeling according to local texture 94
features. The second approach relies on a region-level vari- 95
ational framework, which resorts to a level-set minimization 96
of an energy criterion involving global-region-based seafloor 97
statistics. 98
This paper is organized as follows. The seafloor similarity 99
measure is introduced in Section II. The Bayesian segmentation 100
method is detailed in Section III. The region-based segmen- 101
tation algorithm is described in Section IV. Experiments are 102
reported and discussed in Section V, and conclusions are drawn 103
in Section VI. 104
II. SONAR-TEXTURE SIMILARITY MEASURE 105
Texture-based segmentation of seabed sonar images gener- 106
ally relies on Haralick [30] parameters or scalar spectral and 107
filter coefficients to model textures [20]–[22]. Recently, in the 108
field of texture analysis, features computed as statistics of local 109
filter responses have been shown to be relevant and discriminant 110
texture descriptors [23]–[27]. Motivated by these studies, we 111
propose to use texture features computed as marginal distrib- 112
utions of a wide set of filter seafloor responses. Each seafloor 113
type denoted by Tk is characterized by a set Qk composed of 114
the marginal distributions of the seafloor with respect to the 115
predefined filters. The following conditions are issued. 116
1) 121 cooccurrence distributions with horizontal and ver- 117
tical displacements denoted by dx and dy , respectively, 118
(dx, dy) ∈ {0, 1, . . . , 10}. 119
2) 50 distributions of the magnitude of Gabor filter 120
responses, computed for combination of parameters 121
(f0, σ, θ), where f0 is the radial frequency, σ is 122
the standard deviation, and θ is the orientation, such 123
that f0 ∈ {√
2/2k}k=1:6, σ ∈ {2k√
2}k=2:5, and θ ∈ 124
{0◦, 25◦, 45◦, 90◦, 135◦}. 125
3) 48 distributions of the energy of the image wavelet packet 126
coefficient computed for different bands (we used three 127
wavelet types: Haar, Daubechies, and Coiflet). 128
IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 3
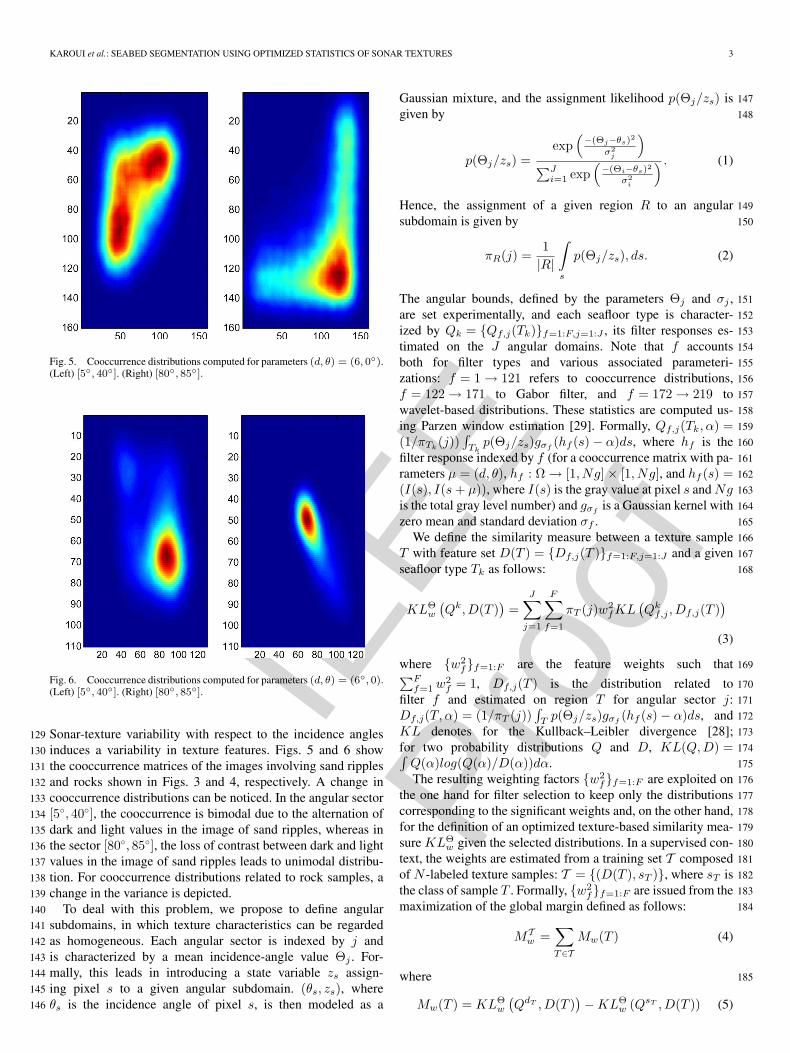
Fig. 5. Cooccurrence distributions computed for parameters (d, θ) = (6, 0◦).(Left) [5◦, 40◦]. (Right) [80◦, 85◦].
Fig. 6. Cooccurrence distributions computed for parameters (d, θ) = (6◦, 0).(Left) [5◦, 40◦]. (Right) [80◦, 85◦].
Sonar-texture variability with respect to the incidence angles129
induces a variability in texture features. Figs. 5 and 6 show130
the cooccurrence matrices of the images involving sand ripples131
and rocks shown in Figs. 3 and 4, respectively. A change in132
cooccurrence distributions can be noticed. In the angular sector133
[5◦, 40◦], the cooccurrence is bimodal due to the alternation of134
dark and light values in the image of sand ripples, whereas in135
the sector [80◦, 85◦], the loss of contrast between dark and light136
values in the image of sand ripples leads to unimodal distribu-137
tion. For cooccurrence distributions related to rock samples, a138
change in the variance is depicted.139
To deal with this problem, we propose to define angular140
subdomains, in which texture characteristics can be regarded141
as homogeneous. Each angular sector is indexed by j and142
is characterized by a mean incidence-angle value Θj . For-143
mally, this leads in introducing a state variable zs assign-144
ing pixel s to a given angular subdomain. (θs, zs), where145
θs is the incidence angle of pixel s, is then modeled as a146
Gaussian mixture, and the assignment likelihood p(Θj/zs) is 147
given by 148
p(Θj/zs) =exp
(−(Θj−θs)2
σ2j
)∑J
i=1 exp(
−(Θi−θs)2
σ2i
) . (1)
Hence, the assignment of a given region R to an angular 149
subdomain is given by 150
πR(j) =1|R|
∫s
p(Θj/zs), ds. (2)
The angular bounds, defined by the parameters Θj and σj , 151
are set experimentally, and each seafloor type is character- 152
ized by Qk = {Qf,j(Tk)}f=1:F,j=1:J , its filter responses es- 153
timated on the J angular domains. Note that f accounts 154
both for filter types and various associated parameteri- 155
zations: f = 1 → 121 refers to cooccurrence distributions, 156
f = 122 → 171 to Gabor filter, and f = 172 → 219 to 157
wavelet-based distributions. These statistics are computed us- 158
ing Parzen window estimation [29]. Formally, Qf,j(Tk, α) = 159
(1/πTk(j))
∫Tk
p(Θj/zs)gσf(hf (s) − α)ds, where hf is the 160
filter response indexed by f (for a cooccurrence matrix with pa- 161
rameters μ = (d, θ), hf : Ω → [1, Ng] × [1, Ng], and hf (s) = 162
(I(s), I(s + μ)), where I(s) is the gray value at pixel s and Ng 163
is the total gray level number) and gσfis a Gaussian kernel with 164
zero mean and standard deviation σf . 165
We define the similarity measure between a texture sample 166
T with feature set D(T ) = {Df,j(T )}f=1:F,j=1:J and a given 167
seafloor type Tk as follows: 168
KLΘw
(Qk,D(T )
)=
J∑j=1
F∑f=1
πT (j)w2fKL
(Qk
f,j ,Df,j(T ))(3)
where {w2f}f=1:F are the feature weights such that 169∑F
f=1 w2f = 1, Df,j(T ) is the distribution related to 170
filter f and estimated on region T for angular sector j: 171
Df,j(T, α) = (1/πT (j))∫
T p(Θj/zs)gσf(hf (s) − α)ds, and 172
KL denotes for the Kullback–Leibler divergence [28]; 173
for two probability distributions Q and D, KL(Q,D) = 174∫Q(α)log(Q(α)/D(α))dα. 175
The resulting weighting factors {w2f}f=1:F are exploited on 176
the one hand for filter selection to keep only the distributions 177
corresponding to the significant weights and, on the other hand, 178
for the definition of an optimized texture-based similarity mea- 179
sure KLΘw given the selected distributions. In a supervised con- 180
text, the weights are estimated from a training set T composed 181
of N -labeled texture samples: T = {(D(T ), sT )}, where sT is 182
the class of sample T . Formally, {w2f}f=1:F are issued from the 183
maximization of the global margin defined as follows: 184
MTw =
∑T∈T
Mw(T ) (4)
where 185
Mw(T ) = KLΘw
(QdT ,D(T )
)− KLΘ
w (QsT ,D(T )) (5)

IEEE
Proo
f
4 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
where dT is the nearest class to T different from sT according186
to the similarity measure KLΘw187
dT = arg mink �=sT
KLΘw
(Qk,D(T )
). (6)
The maximization of the margin criterion MTw is carried out188
using a stochastic gradient method as detailed in our previous189
work [39].190
III. BAYESIAN SONAR-IMAGE SEGMENTATION191
As far as Bayesian image segmentation is concerned, the192
most popular criteria are the maximum a posteriori (MAP)193
[31] and the maximum marginal probability (MMP) [32]. It194
has been shown that the MMP estimation criterion is more195
appropriate for image segmentation than the MAP criterion196
[32]. The MAP estimate assigns the same cost to every incorrect197
segmentation regardless the number of pixels at which the198
estimated segmentation differs from the true one, whereas the199
MMP algorithm minimizes the expected value of the number of200
misclassified pixels. As shown in [32], the MMP procedure is201
equivalent to maximizing the marginal of the class labels. Let202
us introduce the following notations:203
1) S, the image lattice composed of N pixels;204
2) X = {xs}s∈S , the label random field;205
3) Y = {ys}s∈S , the random field of the observations, the206
textural feature in our case.207
Formally, the MMP scheme is equivalent to the maximi-208
zation of209
x̂MMPs = arg max
k∈{1:K}p(xs = k/y). (7)
In general, pixel conditional likelihood is computed according210
to local texture features like Gabor or wavelet coefficients.211
Here, we aim at using the proposed similarity measure KLΘw .212
We associate to each pixel s a set of features D(Ws) =213
{Df (Ws)}f=1:F estimated according to a Parzen estimation214
method [29], within a square window Ws centered at s. The215
window size that we denote by TW is set by the user according216
to texture coarseness. In our case, the observation denoted217
by a random field Y is specified by {ys = D(Ws)}s∈S . The218
conditional likelihood at each pixel s with respect to class k is219
then defined from the similarity measure KLΘw by220
p(ys/xs = k) =exp−KLΘ
w(Qk,D(Ws))∑Ki=1 exp−KLΘ
w(Qi,D(Ws)). (8)
As a prior PX , we consider a Markov random field associ-221
ated to an eight-neighborhood system with potential functions222
given by223
U2(x) =∑s∈S
∑t∈cs
αc (1 − δ(xs, xt)) (9)
where δ is the delta function and αc ∈ {αH , αV , αD} are real224
parameters assigned, respectively, to horizontal, vertical, and225
diagonal cliques. These parameters are estimated using the226
iterative conditional estimation procedure [42]. Using Bayes 227
rule, the posterior distribution is expressed as follows: 228
p(X,Y ) = p(Y/X)p(X) = p(X)∏s
p(ys/xs)
≈ exp
(∑s∈S
∑t∈cs
−αc(1−δ(xs,xt))+log(p(ys/xs))
). (10)
The maximization of local probabilities p(xs = k/y) is car- 229
ried out as follows [32]: We use the Gibbs sampler to gen- 230
erate a discrete-time Markov chain X(t) which converges in 231
distribution to a random field with probability mass functions 232
P (X/Y ). The marginal conditional distributions p(xs = k/y) 233
are then approximated as the fraction of time the Markov chain 234
spends in state k for each class k and each pixel s. The MMP 235
segmentation steps are the following. 236
1) Simulation of Tmax realizations of x1, x2, . . . , xTmax of 237
X using Gibbs sampler. 238
2) Using the realizations x1, x2, . . . , xTmax , p(xs/y) is esti- 239
mated using the frequency of each realizations 240
p(xs = k/y) =δ(x1
s − k)
+ · · · + δ(x1
s − k)
Tmax.
3) Choose as xs the class that maximizes p(xs = k/y). 241
IV. VARIATIONAL SONAR-IMAGE SEGMENTATION 242
Unlike the Bayesian scheme, the second approach is stated 243
at a region level as the minimization of a constrained energy 244
criterion E({Ωk}k=1:K) = E1 + E2, where Ωk is the domain 245
composed of all pixels attributed to the class k, E1 is a texture- 246
based data-driven term, and E2 is a regularization term detailed 247
as follows. 248
A. Functional Terms 249
E1({Ωk}k=1:K) is evaluated as the log-likelihood of a given 250
partition with respect to texture models. It is evaluated as the 251
sum of the similarities according to the measure KLΘw between 252
each region Ωk and its corresponding class Tk 253
E1 ({Ωk}k=1:K) =K∑
k=1
KLΘw
(Qk,D(Ωk)
)(11)
where Df,j(Ωk) is the marginal distribution of the image 254
response to the filter indexed by f . For angular domain j, 255
Df,j(Ωk) is estimated according to Parzen method [29]. 256
E2 is a regularization term, it penalizes the lengths of region 257
contours and is expressed by 258
E2 =K∑
k=1
γk|Γk|, γk ∈ �+ (12)
where |Γk| is the length of the contour Γk associated to the 259
region Ωk. 260

IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 5
B. Computation of the Evolution Equation261
We solve for the minimization of the functional E using262
a gradient-descent technique. It relies on the computation of263
the first derivative of E according to regions {Ωk}k=1:K . The264
evolution equation of region contours {Γk}k=1:K is then given265
by the following dynamic scheme [33]:266 {∂Γk(x,t)
∂t = Fk(x, t) �Nk
Γk(x, 0) = Γ0k
(13)
where �Nk is the unit inward normal to Γk at pixel x and at267
time t and Fk is the velocity field (in our case, Fk = ∇Ek, the268
derivative of E with respect to Γk).269
The explicit implementation of the curve evolution according270
to the latter dynamic scheme using a difference-approximation271
scheme cannot deal with topological changes of the moving272
front. This could be avoided by introducing the level-set method273
proposed by Osher and Sethian [34]. The basic idea of the274
method is the implicit representation of the moving interface Γ275
by a higher dimensional hypersurface ϕ (the level-set function)276
such that the zero level set of ϕ is actually the set of Γ and277 {Ωinside = {s ∈ Ω/ϕ(s) > 0}Ωoutside = {s ∈ Ω/ϕ(s) < 0} .
The evolution of the contours {Γk}k=1:K (13) is then equiv-278
alent to the evolution of the level-set functions {ϕk}k=1:K [34]279
∂ϕk(s, t)∂t
= Fk(s, t) |∇ϕk(s, t)| ∀s ∈ Ωk. (14)
E2 can be expressed using level-set functions ϕk [36]280
E2 =K∑
k=1
γk limα→0
∫Ω
δα(ϕk)|∇ϕk|ds (15)
where δα is a regularized delta function281
δα(s) ={
12α
(1 + cos
(πsα
)), if |s| ≤ α
0, if |s| < α.(16)
In order to cope with multiclass segmentation and to fulfill the282
image-partition constraint, we use an additional term E3 given283
by the following functional [38]:284
E3 =λ
2
∫Ω
(K∑
k=1
Hα(ϕk) − 1
)2
ds, λ ∈ �+ (17)
where Hα is a regularized Heaviside function285
Hα(s) =
⎧⎨⎩
12
(1 + s
α + 1π sin
(πsα
)), if |s| ≤ α
1, if s > α0, if s < −α.
(18)
As E = E1 + E2 + E3, we have286
∂ϕk
∂t(s, t) =
∂ϕ1k
∂t(s, t) +
∂ϕ2k
∂t(s, t) +
∂ϕ3k
∂t(s, t)
where ∂ϕik/∂t, i = 1, 2, 3 are the evolution equation terms 287
associated, respectively, to functionals Ei, i = 1, 2, 3. 288
The derivatives of the energy terms E2 and E3 are directly 289
estimated from level-set functions [35], [36] 290
∂ϕ2k
∂t(s, t) = γkδα(ϕk)div
(∇ϕk
|∇ϕk|
)∀k ∈ {1 : K} (19)
∂ϕ3k
∂t(s, t)=−δα(ϕk)λ
(K∑
k=1
(Hα(ϕk)−1)
)∀k ∈ {1 : K}.
(20)
The evolution equation related to E1 is more complex, since it 291
involves computations over the spatial support of each region. 292
To differentiate E1, we use shape-derivative tools, particularly 293
the Gâteaux derivative theorem given in [37]. As detailed in the 294
Appendix, it leads to 295
∂ϕ1k
∂t(s, t) = −
J∑j=1
F∑f=1
w2fp(Θj/zs)
[KL
(Qk
f,j ,Dkf,j
)
−(Qk
f,j/Df,j ∗ gσf(hf (s)) − 1
)]|∇ϕk| (21)
where ∗ is the convolution symbol. 296
The evolution equation related to the energy E1 (21) is 297
composed of two terms. 298
1) A global term −∑J
j=1
∑Ff=1 w2
fp(Θj/zs)KL(Qkf,j , 299
Df,j): This term is always negative or null. It is a contrac- 300
tion force that reduces the size of heterogeneous regions. 301
2) A local term∑J
j=1
∑Ff=1 w2
fp(Θj/zs)((Qkf,j/Df,j) − 302
1) ∗ gσf(hf (s)): This term locally compares the features 303
values at each pixel. This term can be positive or neg- 304
ative and aims at readjusting the statistics inside the 305
regions Df,j(Ωk) to fit to prototype models Qkf,j . The 306
contribution of each descriptor f is weighted by w2f and 307
p(Θj/zs), the relative contribution of descriptor f and of 308
angular sector j. 309
The overall evolution equations of the contours {Γk}k=1:K 310
are the following: 311
∂ϕk
∂t(s, t)
=−δα(ϕk)
×
⎡⎣ J∑
j=1
F∑f=1
w2fp(Θj/zs)
×(
KL(Qkf,j ,Df,j)−
Qkf,j
Df,j∗ gσf
(hf (s))+1
)
+ γkdiv(
∇ϕk
|∇ϕk|
)−λ
(K∑
k=1
(Hα(ϕk)−1)
)]∀k.
(22)
We apply these coupled evolution equations until convergence. 312

IEEE
Proo
f
6 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
Fig. 7. Test images and their manual segmentation (in black line).
V. EXPERIMENTAL RESULTS AND DISCUSSION313
In previous work, we have tested the method on various314
optic textures (Brodatz textures). The method was compared315
to other texture-classification methods, and some results are316
reported in [39] and [40]. Here, we evaluate the proposed317
seabed-segmentation technique for different real sonar images318
acquired by a sidescan sonar, as part of a natural seabed-319
mapping project (IFREMER, Rebent Project) [41]. A reference320
interpretation by an expert is available [41]. Fig. 7 shows the321
set of images on which we carried out the experiments. We322
superimposed on these images the manual expert segmentation.323
Image I1 is composed of three seafloor types: rock, mud, and324
marl ripples [41]; I2 of rock, marl ripples, and mud seafloors;325
I3 of mud, sand, and marl ripples; I4 of marl and marl ripples;326
and I5 of sand, sand ripples, and rock. For I2 and I3, the angular327
variability of the sefloors, particularly marl ripples (for I2) and328
marl (for I3), is visually clear.329
For all these images, we first determine the most discriminant330
features among the initial set of 219 features: We apply the331
algorithm described in Section II and detailed in [39], and332
we keep only the feature set such that the cumulative sum333
of weights exceeds 0.9. Only a small number of features are334
retained. For example, Fig. 8 shows the plot of feature weights335
computed for image I1 and I5. For I1, the two cooccurrence336
matrices account for more than 90% of the total weight sum;337
these cooccurrence are computed for parameters (dx, dy) ∈338
{(1, 4), (2, 1)}. For I5, the cooccurrence distributions com-339
puted for parameters (dx, dy) ∈ {(2, 1), (2, 2)} are selected.340
For sonar images, we noticed that cooccurrence matrices are the341
Fig. 8. Feature weights. 1 → 121 cooccurrence distributions, 122 → 171Gabor filter-based features and 172 → 219 wavelet-based distributions.(a) I1. (b) I5.
TABLE ISEGMENTATION ERROR RATES
most selected features. In previous work on Brodatz textures 342
[39], [40], we remarked that Gabor and wavelet filters were 343
selected for oriented textures, whereas cooccurrence distribu- 344
tions, which, in addition to the detection of texture structures, 345
detect the intensity values change, are selected in the case of 346
texture having different intensity values and texture with regular 347
motifs. 348
For the five test images, three segmentation algorithms are 349
compared. 350
1) The maximum-likelihood (ML) segmentation denoted by 351
ML. This method consists in maximizing at each pixel the 352
conditional probability p(ys/xs) given by (8) 353
x̂s = arg maxk
p(ys/xs = k). (23)
Several analysis-window sizes are compared: TW ∈ {7 × 354
7, 17 × 17, 33 × 33}. 355
2) The MMP segmentation described in Section III, applied 356
for several analysis-window sizes: TW ∈ {7 × 7, 17 × 357
17, 33 × 33}. 358
3) The region-based variational segmentation described in 359
Section IV that we denote by V ar. 360
Table I summarizes the different error classification rates for all 361
segmentations. 362
All segmentation methods give quite good results according 363
to the mean classification error rates. MMP and variational 364
approaches are more efficient than the ML-based segmentation 365
because they take into account the spatial dependence between 366
pixels. The difference between these later approaches (MMP 367
and variational methods) mainly lies in the accuracy of the 368
localization of region boundaries and in the dependence of 369
MMP-based segmentation on the window size TW . In fact, 370
for the MMP segmentation, the use of small neighborhood 371
(TW = 7 × 7) leads to more accurate region frontiers but 372
small misclassified patches appear because of the neighborhood 373

IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 7
Fig. 9. MMP segmentation of I1 using TW = 7 × 7, τ = 12.5%.
Fig. 10. MMP segmentation of I1 using TW = 17 × 17, τ = 9.2%.
inefficiency for texture characterization. Conversely, the use374
of large window sizes (TW = 33 × 33) resorts to a lack of375
accuracy in the localization of the boundaries of the seabed376
regions because texture features extracted for pixels close to377
region boundaries involve a mixture of texture characteris-378
tics. The variational region-based approach does not need the379
choice of an analysis window and operates globally on region380
composed of pixels belonging to the same class. It resorts381
to a tradeoff between segmentation accuracy and region ho-382
mogeneity. Figs. 9–13 show examples of the dependence of383
MMP segmentation on the sizes of analysis window and on the384
robustness of the variational approach. In Fig. 14, we plot the385
mean error rate for different window sizes.386
We note that MMP and variational segmentations give sim-387
ilar results when the analysis-window size is well chosen for388
instance, TW = 17 × 17 for image I2 (Figs. 15 and 16), but389
its performance depends a lot on the choice of this parameter.390
This method can however be appropriate when the aim of the391
segmentation is to detect texture regions and without seeking392
for accurate boundaries.393
The variational approach is also interesting because it is394
much faster than the MMP segmentation. Being deterministic,395
the variational approach can be very fast particularly if we use396
appropriate initialization such as an initial segmentation based397
on the ML criterion. Whereas the MMP segmentation needs398
Fig. 11. MMP segmentation of I1 using TW = 33 × 33, τ = 13%.
Fig. 12. Region-based segmentation of I1, τ = 7.5%.
a large number of iterations, each iteration is also complex 399
and involves Gibbs sampling. For our implementations, the 400
convergence time of a variational image typically corresponds 401
to one iteration of the MMP algorithm. 402
To stress the interest of taking into account texture variability 403
with respect to incidence angles, additional segmentation re- 404
sults are reported for image I2 and I3 for which the seafloor 405
texture variability is clearer. In Table II, we summarize the 406
segmentation error rates for the segmentation with (J = 3) and 407
with no angular weighting, i.e., using only one angular domain 408
J = 1, for ML, MMP, and variational methods. In Figs. 17 and 409
18 are reported the associated segmentation results. It can be 410
noticed that a classical segmentation (without taking into ac- 411
count texture variability within incidence angles) cannot distin- 412
guish between visually similar seafloors (mud and marl ripples 413
for I2 and marl and sand for I3) near the specular domain. 414
VI. CONCLUSION 415
We proposed two segmentation algorithms for sonar-image 416
segmentation: a Bayesian algorithm using local statistics and a 417
region-based variational algorithm, both based on a novel sim- 418
ilarity measure between seafloor-type images according to the 419
statistics of their responses to a large set of filters. This similar- 420
ity measure is expressed as a weighted sum of Kullback–Leibler 421

IEEE
Proo
f
8 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
Fig. 13. Segmentations of I4. (a) MMP: TW = 7, τ = 4%. (b) MMP: TW = 33, τ = 6%. (c) Variational method: τ = 3%.
Fig. 14. Mean segmentation error rate for several window sizes.
Fig. 15. MMP-based segmentation of I2 TW = 17, τ = 4%.
divergences between individual seafloor filter-response statis-422
tics. The resulting weighting factors are exploited on the one423
hand for filter selection and, on the other hand, for taking424
into account the incidence angular dependence of seafloor tex-425
tures. The conclusion is the cooccurrence matrices outperform426
the other features for our sonar images. The results show427
that the performance of the Bayesian approach depends on428
the size of the analysis window. For pixel-based segmenta-429
tion (ML and MMP segmentations), the size must be tuned430
according to the coarseness of given textures. The results431
also stress the suitability of the region-based approach as432
compared to the Bayesian pixel-based scheme for texture seg-433
mentation and demonstrate the interest of taking into account434
Fig. 16. Variational-based segmentation of I2, τ = 3%.
TABLE IISEGMENTATION ERROR RATES
Fig. 17. I2 region-based segmentation with and without angular weighting.(a) J = 1, τ = 23.5%. (b) J = 3, τ = 3%.
Fig. 18. I3 MMP-based segmentation with and without angular weighting.(a) J = 1, τ = 16%. (b) J = 3, τ = 8%.
the angular backscatter variabilities to discriminate between 435
seafloor types particularly near the specular sector. 436

IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 9
APPENDIX437
EVOLUTION EQUATION COMPUTATION438
Using the shape-derivative tools, we want to differentiate the439
functional440
F (Ωk) = KLΘw
(Qk,D(Ωk)
)which can be written as follows:441
J∑j=1
F∑f=1
πΩk(j)w2
f
∫Rf
Qkf,j(α) log
(Qk
f,j(α)Df,j(Ωk, α)
)dα.
Let us introduce the following notations.442
1)443
Hkj = Qk
f,j(α) log
(Qk
f,j(α)Df,j(Ωk, α)
).
2)444
G1 =∫Ωk
p(Θj/zs)gσf(hf (s) − α) ds.
Then, we have445
F (Ωk) =J∑
j=1
F∑f=1
w2fπΩk
(j)∫
Rf
Hkj .
The Gâteaux derivative of F (Ωk) in the direction of a vector446
field �V is given by447
dF (Ωk, �V ) =J∑
j=1
F∑f=1
w2fdπΩk
(j)(Ωk, �V )∫
Rf
Hkj dα
+ πΩk(j)
∫Rf
dHkj (Ωk, �V )dα. (24)
Theorem: See [37].448
The Gâteaux derivative of a functional of the type K(Ω) =449 ∫Ω k(s,Ω)ds is given by450
dK(Ω, �V ) =∫Ω
ksh(s,Ω, �V )ds −∫Γ
k(s,Ω)(�V �N)da(s)
where Ω denoted a region and Γ its boundary; ksh(s,Ω, �V ) is451
the shape derivative of k(s,Ω).452
In our case453
dπΩk(j)(Ωk, �V ) = −
∫Γk
p(Θj/zs)(�V · �Nk)d�a(s)
Hkj can be written as454
Hkj = Qk
f,j(α) log
(πΩk
(j)Qkf,j(α)
G1(Ωk, f, j, α)
).
Using the chain rule, we get 455
dHkj (Ωk, �V )=
(∂Hk
j
∂G1dG1(Ωk, �V )+
∂Hkj
∂πΩk(j)
dπΩk(j)(Ωk, �V )
)
∂Hkj
∂G1= −
Qkf,j
G1
∂Hkj
∂πΩk(j)
=Qk
f,j
πΩk(j)
.
According to the previous theorem, we get 456
dG1(Ωk, �V ) = −∫Γk
p(Θj/zs)gσf(hf (s) − α) (�V · �Nk)d�a(s).
Finally, we get 457
dHkj (Ωk, �V )
=∫Γk
p(Θj/zs)
[Qk
f,j(α)G1(f, α,Ωk)
gσf(hf (s) − α) − Qf (α)
πΩk(j)
]
× (�V · �Nk)d�a(s)
=1
πΩk(j)
∫Γk
p(Θj/zs)
[Qk
f,j(α)Df,j(Ωk, α)
gσf(hf (s)−α) Qf (α)
]
× (�V · �Nk)d�a(s)∫
Rf
dHkj (Ωk, �V )dα
=1
πΩk(j)
∫Γk
p(Θj/zs)
[Qk
f,j
Df,j(Ωk)∗ gσf
(hf (s)) − 1
]
× (�V · �Nk)d�a(s).
Finally, according to (24) 458
dF (Ωk, �V )
= −J∑
j=1
F∑f=1
p(Θj/zs)w2f
×∫Γk
[KL
(Qk
f,j ,Df,j
)−
(Qk
f,j
Df,j(Ωk)−1
)∗ gσf
(hf (s))
]
×(
�V · �Nk
)d�a(s).
REFERENCES 459
[1] P. Brehmer, F. Gerlotto, J. Guillard, F. Sanguinède, Y. Guénnegan, and 460D. Buestel, “New applications of hydroacoustic methods for monitoring 461shallow water aquatic ecosystems: The case of mussel culture grounds,” 462Aquat. Living Resour., vol. 16, no. 3, pp. 333–338, Jul. 2003. 463
[2] M. Mignotte, C. Collet, P. Perez, and P. Bouthemy, “Hybrid genetic 464optimization and statistical model based approach for the classification 465of shadow shapes in sonar imagery,” IEEE Trans. Pattern Anal. Mach. 466Intell., vol. 22, no. 2, pp. 129–141, Feb. 2000. 467

IEEE
Proo
f
10 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
[3] L. Hellequin, J. M. Boucher, and X. Lurton, “Processing of high-468frequency multibeam echo sounder data for seafloor characterization,”469IEEE J. Ocean. Eng., vol. 28, no. 1, pp. 78–89, Jan. 2003.470
[4] G. Le Chenadec and J. M. Boucher, “Sonar image segmentation us-471ing the angular dependence of backscattering distributions,” in Proc.472Oceans—Europe, Brest, France, 2005, vol. 1, pp. 147–152.473
[5] G. Le Chenadec, J.-M. Boucher, and X. Lurton, “Angular dependence474of K-distributed sonar data,” IEEE Trans. Geosci. Remote Sens., vol. 45,475no. 5, pp. 1224–1236, May 2007.476
[6] E. Jakeman, “Non-Gaussian models for the statistics of scattered waves,”477Adv. Phys., vol. 37, no. 5, pp. 471–529, Oct. 1988.478
[7] A. P. Lyons and D. A. Abraham, “Statistical characterization of high-479frequency shallow-water seafloor backscatter,” J. Acoust. Soc. Amer.,480vol. 106, no. 3, pp. 1307–1315, Sep. 1999.481
[8] D. A. Abraham and A. P. Lyons, “Novel physical interpretations of482k-distributed reverberation,” IEEE J. Ocean. Eng., vol. 27, no. 4, pp. 800–483813, Oct. 2002.484
[9] N. C. Mitchell, “Processing and analysis of Simrad multibeam sonar485data,” Mar. Geophys. Res., vol. 18, no. 6, pp. 729–739, Dec. 1996.486
[10] G. Le Chenadec, J. M. Boucher, X. Lurton, and J. M. Augustin, “Angular487dependence of statistical distributions for backscattered signals: Model-488ing and application to multibeam echosounder data,” in Proc. Oceans,489Sep. 2003, vol. 2, pp. 897–903.490
[11] D. R. Jackson, D. P. Winbrenner, and A. Ishimaru, “Application of the491composite roughness model to high-frequency bottom backscattering,”492J. Acoust. Soc. Amer., vol. 79, no. 5, pp. 1410–1422, May 1986.493
[12] C. de Moustier and D. Alexandrou, “Angular dependence of 12-kHz494seafloor acoustic backscatter,” J. Acoust. Soc. Amer., vol. 90, no. 1,495pp. 522–531, Jul. 1991.496
[13] J. E. Hughes-Clarke, “Toward remote seafloor classification using the497angular response of acoustic backscatter: A case study from multiple498overlapping GLORIA data,” IEEE J. Ocean. Eng., vol. 19, no. 1, pp. 112–499127, Jan. 1994.500
[14] E. Pouliquen and X. Lurton, “Automated sea-bed classification system for501echo-sounders,” in Proc. Oceans, Oct. 1992, vol. 1, pp. 317–321.502
[15] D. Langer and M. Herbert, “Building qualitative elevation maps from side503scan sonar data for autonomous underwater navigation,” in Proc. IEEE504Int. Conf. Robot. Autom., Apr. 1991, vol. 3, pp. 2478–2483.505
[16] R. Li and S. Pai, “Improvement of bathymetric data bases by shape from506shading technique using side-scan sonar images,” in Proc. OCEANS,507Oct. 1991, vol. 1, pp. 320–324.508
[17] E. Dura, J. Bell, and D. Lane, “Reconstruction of textured seafloors from509side-scan sonar images,” Proc. Inst. Elect. Eng.—Radar Sonar Navig.,510vol. 151, no. 2, pp. 114–125, Apr. 2004.511
[18] A. E. Johnson and M. Hebert, “Seafloor map generation for autonomous512underwater vehicle navigation,” Auton. Robots, vol. 3, no. 2, pp. 145–168,513Jun. 1996.514
[19] R. Zhang, P. Tsai, J. E. Cryer, and M. Shah, “Shape from shading:515A survey,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 21, no. 8, pp. 690–516705, Aug. 1999.517
[20] T. H. Eggen, “Acoustic sediment classification experiment by means518of multibeam echosounders,” Acoust. Classification Mapping Seabed,519vol. 15, no. 2, pp. 437–444, 1993.520
[21] L. M. Linnett, S. J. Clarke, and D. R. Carmichael, “The analysis of521sidescan sonar images for seabed types and objects,” in Proc. 2nd Eur.522Conf. Underwater Acoust., 1994, vol. 22, pp. 187–194.523
[22] M. Lianantonakis and Y. R. Petillot, “Sidescan sonar segmentation using524active contours and level set method,” in Proc. OCEANS—Europe, Brest,525France, 2005, vol. 1, pp. 719–724.526
[23] L. Xiuwen and W. DeLiang, “Texture classification using spectral his-527tograms,” IEEE Trans. Image Process., vol. 12, no. 6, pp. 661–670,528Jun. 2003.529
[24] O. G. Cula and K. Dana, “3D texture recognition using bidirectional530feature histograms,” Int. J. Comput. Vis., vol. 59, no. 1, pp. 33–60,531Aug. 2004.532
[25] R. Fablet and P. Bouthemy, “Motion recognition using nonparametric im-533age motion models estimated from temporal and multiscale co-occurrence534statistics,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 25, no. 12,535pp. 1619–1624, Dec. 2003.536
[26] P. Nammalwar, O. Ghita, and P. F. Whelan, “Integration of feature distrib-537utions for colour texture segmentation,” in Proc. Int. Conf. Pattern Recog.,538Aug. 2005, vol. 1, pp. 716–719.539
[27] Q. Xu, J. Yang, and S. Ding, “Texture Segmentation using LBP embedded540region competition,” Electron. Lett. Comput. Vis. Image Anal., vol. 5,541no. 1, pp. 41–47, 2004.542
[28] S. Kullback, “On information and sufficiency,” in The Annals of Mathe-543matical Statistics, vol. 22. New York: Wiley, 1951.544
[29] E. Parzen, “On estimation of a probability density function and mode,” 545Ann. Math. Stat., vol. 33, no. 3, pp. 1065–1076, Sep. 1962. 546
[30] R. M. Haralick, “Statistical and structural approaches to texture,” Proc. 547IEEE, vol. 67, no. 5, pp. 786–804, May 1979. 548
[31] S. Geman and G. Geman, “Stochastic relaxation, Gibbs distributions, and 549the Bayesian restoration of images,” IEEE Trans. Pattern Anal. Mach. 550Intell., vol. PAMI-6, no. 6, pp. 721–741, Nov. 1984. 551
[32] J. Marroquin, S. Mitter, and T. Poggio, “Probabilistic solution of ill-posed 552problems in computational vision,” J. Am. Stat. Assoc., vol. 82, no. 397, 553pp. 76–89, Mar. 1987. 554
[33] M. Kass, A. Withkin, and D. Terzopoulos, “Snakes: Active contour mod- 555els,” Int. J. Comput. Vis., vol. 1, no. 4, pp. 321–331, Jan. 1988. 556
[34] J. A. Sethian, Level Set Methods. Cambridge, U.K.: Cambridge Univ. 557Press, 1996. 558
[35] J. F. Aujol, G. Aubert, and L. Blanc-Féraud, “Wavelet-based level set evo- 559lution for classification of textured images,” IEEE Trans. Image Process., 560vol. 12, no. 12, pp. 1634–1641, Dec. 2003. 561
[36] C. Samson, L. Blanc-Féraud, G. Aubert, and J. Zerubia, “A level set 562method for image classification,” Int. J. Comput. Vis., vol. 40, no. 3, 563pp. 187–197, 2000. 564
[37] S. Jehan-Besson, M. Barlaud, and G. Aubert, “Image segmentation using 565active contours: Calculus of variations or shape gradients?” SIAM J. Appl. 566Math., vol. 63, no. 6, pp. 2128–2154, 2003. 567
[38] H. K. Zhao, T. Chan, B. Merriman, and S. Osher, “A variational level 568set approach to multiphase motion,” J. Comput. Phys., vol. 127, no. 1, 569pp. 179–195, Aug. 1996. 570
[39] I. Karoui, R. Fablet, J. M. Boucher, and J. M. Augustin, “Separability- 571based Kullback divergence weighting and filter selection for texture clas- 572sification and segmentation,” in Proc. 18th ICPR, Hong Kong, Aug. 2006. 573
[40] I. Karoui, R. Fablet, J. M. Boucher, W. Pieczynski, and J. M. Augustin, 574“Fusion of textural statistics using a similarity measure: Application 575to texture recognition and segmentation,” Pattern Anal. Appl., vol. 11, 576no. 3/4, pp. 425–434, Sep. 2008. Computer Science. 577
[41] A. Ehrhold, D. Hamon, and B. Guillaumont, “The Rebent monitor- 578ing network, a spatially integrated, acoustic approach to surveying 579nearshore macrobenthic habitats: Application to the bay of Concarneau 580(South Brittany, France),” ICES J. Mar. Sci., vol. 63, no. 9, pp. 1604– 5811615, Jan. 2006. 582
[42] W. Pieczynski, “Statistical image segmentation,” Mach. Graph. Vis., 583vol. 1, no. 2, pp. 261–268, 1992. 584
Imen Karoui received the M.Sc. degree in telecom- 585munications from École Polytechnique de Tunis, 586Tunisia, in 2002, the D.E.A. degree in STIR (sig- 587nal, télécommunications, images, radar) from the 588Université de Rennes 1, Rennes, France, in 2003, 589and the Ph.D. degree in signal processing and 590telecommunications from the Department of Signal 591and Communications, École Nationale Supérieure 592des Télécommunications de Bretagne (Telecom 593Bretagne), Brest Cedex 3, France, in 2007. 594
She is currently a Postdoctor with Telecom 595Bretagne. Her research interests include texture analysis and segmentation with 596application to acoustic imaging and fisheries. 597
Ronan Fablet receive the M.Sc. degree in signal 598processing and telecommunications from École Na- 599tionale Supérieure de l’Aéronautique et de l’Espace, 600Toulouse Cedex 4, France, in 1997 and the Ph.D. 601degree in signal processing and telecommunications 602from the University of Rennes 1, Rennes, France, 603in 2001. 604
In 2002, he was an INRIA Postdoctoral Fellow 605with Brown University, Providence, RI. From 2003 606to 2007, he had a full-time research position with the 607Institut Français de Recherche et d’Exploitation de 608
la Mer, Brest, France, in the field of biological oceanography. Since 2008, he 609has been an Assistant Professor with the Department of Signal and Commu- 610nications, École Nationale Supérieure des Télécommunications de Bretagne, 611Brest Cedex 3, France. His main interests include sonar and radar imaging 612particularly applied to biological and physical oceanography and signal and 613image processing applied to biological archives. 614

IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 11
Jean-Marc Boucher (M’83) was born in 1952.615He received the M.Sc. degree in telecommunica-616tions from École Nationale Supérieure des Télé-617communications, Paris, France, in 1975 and the618Habilitation à Diriger des Recherches degree from619the University of Rennes 1, Rennes, France, in 1995.620
He is currently a Professor with the Department621of Signal and Communications, École Nationale622Supérieure des Télécommunications de Bretagne,623Brest Cedex 3, France, where he is also an Education624Deputy Director. He is also the Deputy Manager of625
a National Scientific Research Center Laboratory (Institut Telecom-Telecom626Bretagne-UMR CNRS 3192 lab-STICC, Université Européenne de Bretagne-627France). His current researches are related to statistical signal analysis, in-628cluding estimation theory, Markov models, blind deconvolution, wavelets,629and multiscale-image analysis. These methods are applied to radar and sonar630images, seismic signals, and electrocardiographic signals. He published about631a hundred technical articles in these areas in international journals and632conferences.633
Jean-Marie Augustin received the Master degree in 634signal processing from the University of Rennes 1, 635Rennes, France, in 1982. 636
Since 1984, he has been with the Institut Français 637de Recherche et d’Exploitation de la Mer, Brest, 638France, the French public institute for marine re- 639search, where he is currently a Senior Engineer 640with the Department of Acoustics and Seismics. 641His main interests include software development for 642sonar seafloor mapping and backscatter reflectivity 643analysis. 644

IEEE
Proo
f
IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008 1
Seabed Segmentation Using Optimized Statisticsof Sonar Textures
1
2
Imen Karoui, Ronan Fablet, Jean-Marc Boucher, Member, IEEE, and Jean-Marie Augustin3
Abstract—In this paper, we propose and compare two super-4vised algorithms for the segmentation of textured sonar images,5with respect to seafloor types. We characterize seafloors by a set of6empirical distributions estimated on texture responses to a set of7different filters. Moreover, we introduce a novel similarity measure8between sonar textures in this feature space. Our similarity mea-9sure is defined as a weighted sum of Kullback–Leibler divergences10between texture features. The weight setting is twofold. First,11each filter is weighted according to its discrimination power: The12computation of these weights are issued from a margin maxi-13mization criterion. Second, an additional weight, evaluated as an14angular distance between the incidence angles of the compared15texture samples, is considered to take into account sonar-image16acquisition process that leads to a variability of the backscattered17value and of the texture aspect with the incidence-angle range.18A Bayesian framework is used in the first algorithm where the19conditional likelihoods are expressed using the proposed similarity20measure between local pixel statistics and the seafloor prototype21statistics. The second method is based on a variational framework22as the minimization of a region-based functional that involves the23similarity between global-region texture-based statistics and the24predefined prototypes.25
Index Terms—Active regions, angular backscattering, feature26selection, level sets, maximum marginal probability (MMP), seg-27mentation, sonar images, texture.28
I. INTRODUCTION29
ACOUSTIC remote sensing, such as high-resolution multi-30
beam and sidescan sonars, provides new means for in situ31
observation of the seabed. The characterization of these high-32
resolution sonar images is important for a number of practical33
applications such as marine geology, commercial fishing, off-34
shore oil prospecting, and drilling [1]–[4].35
The segmentation and the classification of sonar images with36
respect to seafloor types (rocks, mud, sand, . . .) is the key37
goal behind the analysis of these acoustic images. This task,38
however, raises two major difficulties. The first task is to deal39
with texture in these images. Previous methods are generally40
based only on backscattered (BS) intensity models, and several41
parametric families of probabilistic distribution functions have42
Manuscript received January 4, 2008; revised May 20, 2008 andAugust 11, 2008.
I. Karoui, R. Fablet, and J.-M. Boucher are with the Department of Signaland Communications, École Nationale Supérieure des Télécommunications deBretagne, 29238 Brest Cedex 3, France (e-mail: [email protected]).
J.-M. Augustin is with the Department of Acoustics and Seismics, InstitutFrançais de Recherche et d’Exploitation de la Mer, 29280 Brest, France.
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TGRS.2008.2006362
Fig. 1. Typical sidscan sonar image (Rebent, IFREMER).
Fig. 2. BS evolution with the incidence angles for the three seafloor types ofFig. 1: sand, mud, and sand ripples.
been suggested (Rayleigh distribution, K distribution, Weibull 43
distribution, etc.) [3]–[8]. These first-order statistics are not 44
sufficient when high-resolution sonar images involve textures, 45
which is the case of most sonar images (Fig. 1). 46
The other important issue arising in seabed texture charac- 47
terization is a built-in feature of sonar observation: The value 48
of BS measure depends both on the seafloor type and on the 49
incident angle of the reflected acoustic signal, ranging typically 50
from −85◦ to +85◦. Fig. 2 shows the BS evolution for three 51
different seafloor types: sand, sand ripples, and mud. In addition 52
to the BS variability within incidence angles, seafloor textures 53
0196-2892/$25.00 © 2008 IEEE

IEEE
Proo
f
2 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
Fig. 3. Sonar image composed of sand ripples. (Left) [5◦, 40◦].(Right) [80◦, 85◦].
are dependent on the incidence angles. Figs. 3 and 4 show a54
sonar image composed by sand ripples and rocks, respectively,55
for two angular sectors: [80◦, 85◦] and [5◦, 40◦]. The texture56
of sand ripples shows a loss of contrast in the specular sec-57
tor [5◦, 40◦]: The steep grazing angle reduces the backscatter58
differences between facing and trailing slopes, while at low59
incidence angles, much of the variation is lost due to increasing60
sonar shadow. A similar loss of contrast is observable in the61
rock samples (Fig. 4). BS behavior according to the incidence62
angles has been of wide interest for sonar imaging [3], [9]–[12].63
Parametric and nonparametric techniques have been proposed64
to model sonar-image behavior with respect to the incidence65
angle variations. The effect of the incidence angle on the BS66
has also been explored as a discriminating feature for seafloor67
recognition [4], [13], [14]. However, no studies have proposed68
a method to accurately compensate this phenomena because69
of the joint dependence of the seafloor types and on the local70
bathymetry which is generally unknown for sidescan sonar71
images. To our knowledge, the effects of the incidence angle on72
textured seabed features have not been addressed for segmen-73
tation issues. Only some studies were interested in simulating74
the behavior of oriented and textured seafloor types [15]–[18].75
These methods are mainly based on shape-from-shading [19]76
and were restricted to synthetic images or to real sonar images77
involving only one seafloor type.78
In this paper, we aim at using texture information within79
sonar seabed images and at developing segmentation algo-80
rithms that take into account angular variability of BS and81
textural features. We propose to characterize seafloors by a82
wide set of marginal distributions of their filter responses, and83
we measure seafloor similarities according to a weighted sum84
of Kullback–Leibler divergences [28] in this feature space.85
To cope with seafloor angular dependence, we introduce an86
additional weighting factor, evaluated as an angular distance87
between the compared texture samples: This angular distance88
is measured according to Gaussian kernels, whose variance89
sets the level of the angular variability, depending on textures90
and seafloor types. The proposed incidence-angle-and-texture-91
based similarity measure is exploited to develop two different92
Fig. 4. Rock texture for two angular sectors. (Left) [5◦, 40◦].(Right) [80◦, 85◦].
segmentation schemes. We first state the segmentation issue 93
as a Bayesian pixel-based labeling according to local texture 94
features. The second approach relies on a region-level vari- 95
ational framework, which resorts to a level-set minimization 96
of an energy criterion involving global-region-based seafloor 97
statistics. 98
This paper is organized as follows. The seafloor similarity 99
measure is introduced in Section II. The Bayesian segmentation 100
method is detailed in Section III. The region-based segmen- 101
tation algorithm is described in Section IV. Experiments are 102
reported and discussed in Section V, and conclusions are drawn 103
in Section VI. 104
II. SONAR-TEXTURE SIMILARITY MEASURE 105
Texture-based segmentation of seabed sonar images gener- 106
ally relies on Haralick [30] parameters or scalar spectral and 107
filter coefficients to model textures [20]–[22]. Recently, in the 108
field of texture analysis, features computed as statistics of local 109
filter responses have been shown to be relevant and discriminant 110
texture descriptors [23]–[27]. Motivated by these studies, we 111
propose to use texture features computed as marginal distrib- 112
utions of a wide set of filter seafloor responses. Each seafloor 113
type denoted by Tk is characterized by a set Qk composed of 114
the marginal distributions of the seafloor with respect to the 115
predefined filters. The following conditions are issued. 116
1) 121 cooccurrence distributions with horizontal and ver- 117
tical displacements denoted by dx and dy , respectively, 118
(dx, dy) ∈ {0, 1, . . . , 10}. 119
2) 50 distributions of the magnitude of Gabor filter 120
responses, computed for combination of parameters 121
(f0, σ, θ), where f0 is the radial frequency, σ is 122
the standard deviation, and θ is the orientation, such 123
that f0 ∈ {√
2/2k}k=1:6, σ ∈ {2k√
2}k=2:5, and θ ∈ 124
{0◦, 25◦, 45◦, 90◦, 135◦}. 125
3) 48 distributions of the energy of the image wavelet packet 126
coefficient computed for different bands (we used three 127
wavelet types: Haar, Daubechies, and Coiflet). 128

IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 3
Fig. 5. Cooccurrence distributions computed for parameters (d, θ) = (6, 0◦).(Left) [5◦, 40◦]. (Right) [80◦, 85◦].
Fig. 6. Cooccurrence distributions computed for parameters (d, θ) = (6◦, 0).(Left) [5◦, 40◦]. (Right) [80◦, 85◦].
Sonar-texture variability with respect to the incidence angles129
induces a variability in texture features. Figs. 5 and 6 show130
the cooccurrence matrices of the images involving sand ripples131
and rocks shown in Figs. 3 and 4, respectively. A change in132
cooccurrence distributions can be noticed. In the angular sector133
[5◦, 40◦], the cooccurrence is bimodal due to the alternation of134
dark and light values in the image of sand ripples, whereas in135
the sector [80◦, 85◦], the loss of contrast between dark and light136
values in the image of sand ripples leads to unimodal distribu-137
tion. For cooccurrence distributions related to rock samples, a138
change in the variance is depicted.139
To deal with this problem, we propose to define angular140
subdomains, in which texture characteristics can be regarded141
as homogeneous. Each angular sector is indexed by j and142
is characterized by a mean incidence-angle value Θj . For-143
mally, this leads in introducing a state variable zs assign-144
ing pixel s to a given angular subdomain. (θs, zs), where145
θs is the incidence angle of pixel s, is then modeled as a146
Gaussian mixture, and the assignment likelihood p(Θj/zs) is 147
given by 148
p(Θj/zs) =exp
(−(Θj−θs)2
σ2j
)∑J
i=1 exp(
−(Θi−θs)2
σ2i
) . (1)
Hence, the assignment of a given region R to an angular 149
subdomain is given by 150
πR(j) =1|R|
∫s
p(Θj/zs), ds. (2)
The angular bounds, defined by the parameters Θj and σj , 151
are set experimentally, and each seafloor type is character- 152
ized by Qk = {Qf,j(Tk)}f=1:F,j=1:J , its filter responses es- 153
timated on the J angular domains. Note that f accounts 154
both for filter types and various associated parameteri- 155
zations: f = 1 → 121 refers to cooccurrence distributions, 156
f = 122 → 171 to Gabor filter, and f = 172 → 219 to 157
wavelet-based distributions. These statistics are computed us- 158
ing Parzen window estimation [29]. Formally, Qf,j(Tk, α) = 159
(1/πTk(j))
∫Tk
p(Θj/zs)gσf(hf (s) − α)ds, where hf is the 160
filter response indexed by f (for a cooccurrence matrix with pa- 161
rameters μ = (d, θ), hf : Ω → [1, Ng] × [1, Ng], and hf (s) = 162
(I(s), I(s + μ)), where I(s) is the gray value at pixel s and Ng 163
is the total gray level number) and gσfis a Gaussian kernel with 164
zero mean and standard deviation σf . 165
We define the similarity measure between a texture sample 166
T with feature set D(T ) = {Df,j(T )}f=1:F,j=1:J and a given 167
seafloor type Tk as follows: 168
KLΘw
(Qk,D(T )
)=
J∑j=1
F∑f=1
πT (j)w2fKL
(Qk
f,j ,Df,j(T ))(3)
where {w2f}f=1:F are the feature weights such that 169∑F
f=1 w2f = 1, Df,j(T ) is the distribution related to 170
filter f and estimated on region T for angular sector j: 171
Df,j(T, α) = (1/πT (j))∫
T p(Θj/zs)gσf(hf (s) − α)ds, and 172
KL denotes for the Kullback–Leibler divergence [28]; 173
for two probability distributions Q and D, KL(Q,D) = 174∫Q(α)log(Q(α)/D(α))dα. 175
The resulting weighting factors {w2f}f=1:F are exploited on 176
the one hand for filter selection to keep only the distributions 177
corresponding to the significant weights and, on the other hand, 178
for the definition of an optimized texture-based similarity mea- 179
sure KLΘw given the selected distributions. In a supervised con- 180
text, the weights are estimated from a training set T composed 181
of N -labeled texture samples: T = {(D(T ), sT )}, where sT is 182
the class of sample T . Formally, {w2f}f=1:F are issued from the 183
maximization of the global margin defined as follows: 184
MTw =
∑T∈T
Mw(T ) (4)
where 185
Mw(T ) = KLΘw
(QdT ,D(T )
)− KLΘ
w (QsT ,D(T )) (5)

IEEE
Proo
f
4 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
where dT is the nearest class to T different from sT according186
to the similarity measure KLΘw187
dT = arg mink �=sT
KLΘw
(Qk,D(T )
). (6)
The maximization of the margin criterion MTw is carried out188
using a stochastic gradient method as detailed in our previous189
work [39].190
III. BAYESIAN SONAR-IMAGE SEGMENTATION191
As far as Bayesian image segmentation is concerned, the192
most popular criteria are the maximum a posteriori (MAP)193
[31] and the maximum marginal probability (MMP) [32]. It194
has been shown that the MMP estimation criterion is more195
appropriate for image segmentation than the MAP criterion196
[32]. The MAP estimate assigns the same cost to every incorrect197
segmentation regardless the number of pixels at which the198
estimated segmentation differs from the true one, whereas the199
MMP algorithm minimizes the expected value of the number of200
misclassified pixels. As shown in [32], the MMP procedure is201
equivalent to maximizing the marginal of the class labels. Let202
us introduce the following notations:203
1) S, the image lattice composed of N pixels;204
2) X = {xs}s∈S , the label random field;205
3) Y = {ys}s∈S , the random field of the observations, the206
textural feature in our case.207
Formally, the MMP scheme is equivalent to the maximi-208
zation of209
x̂MMPs = arg max
k∈{1:K}p(xs = k/y). (7)
In general, pixel conditional likelihood is computed according210
to local texture features like Gabor or wavelet coefficients.211
Here, we aim at using the proposed similarity measure KLΘw .212
We associate to each pixel s a set of features D(Ws) =213
{Df (Ws)}f=1:F estimated according to a Parzen estimation214
method [29], within a square window Ws centered at s. The215
window size that we denote by TW is set by the user according216
to texture coarseness. In our case, the observation denoted217
by a random field Y is specified by {ys = D(Ws)}s∈S . The218
conditional likelihood at each pixel s with respect to class k is219
then defined from the similarity measure KLΘw by220
p(ys/xs = k) =exp−KLΘ
w(Qk,D(Ws))∑Ki=1 exp−KLΘ
w(Qi,D(Ws)). (8)
As a prior PX , we consider a Markov random field associ-221
ated to an eight-neighborhood system with potential functions222
given by223
U2(x) =∑s∈S
∑t∈cs
αc (1 − δ(xs, xt)) (9)
where δ is the delta function and αc ∈ {αH , αV , αD} are real224
parameters assigned, respectively, to horizontal, vertical, and225
diagonal cliques. These parameters are estimated using the226
iterative conditional estimation procedure [42]. Using Bayes 227
rule, the posterior distribution is expressed as follows: 228
p(X,Y ) = p(Y/X)p(X) = p(X)∏s
p(ys/xs)
≈ exp
(∑s∈S
∑t∈cs
−αc(1−δ(xs,xt))+log(p(ys/xs))
). (10)
The maximization of local probabilities p(xs = k/y) is car- 229
ried out as follows [32]: We use the Gibbs sampler to gen- 230
erate a discrete-time Markov chain X(t) which converges in 231
distribution to a random field with probability mass functions 232
P (X/Y ). The marginal conditional distributions p(xs = k/y) 233
are then approximated as the fraction of time the Markov chain 234
spends in state k for each class k and each pixel s. The MMP 235
segmentation steps are the following. 236
1) Simulation of Tmax realizations of x1, x2, . . . , xTmax of 237
X using Gibbs sampler. 238
2) Using the realizations x1, x2, . . . , xTmax , p(xs/y) is esti- 239
mated using the frequency of each realizations 240
p(xs = k/y) =δ(x1
s − k)
+ · · · + δ(x1
s − k)
Tmax.
3) Choose as xs the class that maximizes p(xs = k/y). 241
IV. VARIATIONAL SONAR-IMAGE SEGMENTATION 242
Unlike the Bayesian scheme, the second approach is stated 243
at a region level as the minimization of a constrained energy 244
criterion E({Ωk}k=1:K) = E1 + E2, where Ωk is the domain 245
composed of all pixels attributed to the class k, E1 is a texture- 246
based data-driven term, and E2 is a regularization term detailed 247
as follows. 248
A. Functional Terms 249
E1({Ωk}k=1:K) is evaluated as the log-likelihood of a given 250
partition with respect to texture models. It is evaluated as the 251
sum of the similarities according to the measure KLΘw between 252
each region Ωk and its corresponding class Tk 253
E1 ({Ωk}k=1:K) =K∑
k=1
KLΘw
(Qk,D(Ωk)
)(11)
where Df,j(Ωk) is the marginal distribution of the image 254
response to the filter indexed by f . For angular domain j, 255
Df,j(Ωk) is estimated according to Parzen method [29]. 256
E2 is a regularization term, it penalizes the lengths of region 257
contours and is expressed by 258
E2 =K∑
k=1
γk|Γk|, γk ∈ �+ (12)
where |Γk| is the length of the contour Γk associated to the 259
region Ωk. 260

IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 5
B. Computation of the Evolution Equation261
We solve for the minimization of the functional E using262
a gradient-descent technique. It relies on the computation of263
the first derivative of E according to regions {Ωk}k=1:K . The264
evolution equation of region contours {Γk}k=1:K is then given265
by the following dynamic scheme [33]:266 {∂Γk(x,t)
∂t = Fk(x, t) �Nk
Γk(x, 0) = Γ0k
(13)
where �Nk is the unit inward normal to Γk at pixel x and at267
time t and Fk is the velocity field (in our case, Fk = ∇Ek, the268
derivative of E with respect to Γk).269
The explicit implementation of the curve evolution according270
to the latter dynamic scheme using a difference-approximation271
scheme cannot deal with topological changes of the moving272
front. This could be avoided by introducing the level-set method273
proposed by Osher and Sethian [34]. The basic idea of the274
method is the implicit representation of the moving interface Γ275
by a higher dimensional hypersurface ϕ (the level-set function)276
such that the zero level set of ϕ is actually the set of Γ and277 {Ωinside = {s ∈ Ω/ϕ(s) > 0}Ωoutside = {s ∈ Ω/ϕ(s) < 0} .
The evolution of the contours {Γk}k=1:K (13) is then equiv-278
alent to the evolution of the level-set functions {ϕk}k=1:K [34]279
∂ϕk(s, t)∂t
= Fk(s, t) |∇ϕk(s, t)| ∀s ∈ Ωk. (14)
E2 can be expressed using level-set functions ϕk [36]280
E2 =K∑
k=1
γk limα→0
∫Ω
δα(ϕk)|∇ϕk|ds (15)
where δα is a regularized delta function281
δα(s) ={
12α
(1 + cos
(πsα
)), if |s| ≤ α
0, if |s| < α.(16)
In order to cope with multiclass segmentation and to fulfill the282
image-partition constraint, we use an additional term E3 given283
by the following functional [38]:284
E3 =λ
2
∫Ω
(K∑
k=1
Hα(ϕk) − 1
)2
ds, λ ∈ �+ (17)
where Hα is a regularized Heaviside function285
Hα(s) =
⎧⎨⎩
12
(1 + s
α + 1π sin
(πsα
)), if |s| ≤ α
1, if s > α0, if s < −α.
(18)
As E = E1 + E2 + E3, we have286
∂ϕk
∂t(s, t) =
∂ϕ1k
∂t(s, t) +
∂ϕ2k
∂t(s, t) +
∂ϕ3k
∂t(s, t)
where ∂ϕik/∂t, i = 1, 2, 3 are the evolution equation terms 287
associated, respectively, to functionals Ei, i = 1, 2, 3. 288
The derivatives of the energy terms E2 and E3 are directly 289
estimated from level-set functions [35], [36] 290
∂ϕ2k
∂t(s, t) = γkδα(ϕk)div
(∇ϕk
|∇ϕk|
)∀k ∈ {1 : K} (19)
∂ϕ3k
∂t(s, t)=−δα(ϕk)λ
(K∑
k=1
(Hα(ϕk)−1)
)∀k ∈ {1 : K}.
(20)
The evolution equation related to E1 is more complex, since it 291
involves computations over the spatial support of each region. 292
To differentiate E1, we use shape-derivative tools, particularly 293
the Gâteaux derivative theorem given in [37]. As detailed in the 294
Appendix, it leads to 295
∂ϕ1k
∂t(s, t) = −
J∑j=1
F∑f=1
w2fp(Θj/zs)
[KL
(Qk
f,j ,Dkf,j
)
−(Qk
f,j/Df,j ∗ gσf(hf (s)) − 1
)]|∇ϕk| (21)
where ∗ is the convolution symbol. 296
The evolution equation related to the energy E1 (21) is 297
composed of two terms. 298
1) A global term −∑J
j=1
∑Ff=1 w2
fp(Θj/zs)KL(Qkf,j , 299
Df,j): This term is always negative or null. It is a contrac- 300
tion force that reduces the size of heterogeneous regions. 301
2) A local term∑J
j=1
∑Ff=1 w2
fp(Θj/zs)((Qkf,j/Df,j) − 302
1) ∗ gσf(hf (s)): This term locally compares the features 303
values at each pixel. This term can be positive or neg- 304
ative and aims at readjusting the statistics inside the 305
regions Df,j(Ωk) to fit to prototype models Qkf,j . The 306
contribution of each descriptor f is weighted by w2f and 307
p(Θj/zs), the relative contribution of descriptor f and of 308
angular sector j. 309
The overall evolution equations of the contours {Γk}k=1:K 310
are the following: 311
∂ϕk
∂t(s, t)
=−δα(ϕk)
×
⎡⎣ J∑
j=1
F∑f=1
w2fp(Θj/zs)
×(
KL(Qkf,j ,Df,j)−
Qkf,j
Df,j∗ gσf
(hf (s))+1
)
+ γkdiv(
∇ϕk
|∇ϕk|
)−λ
(K∑
k=1
(Hα(ϕk)−1)
)]∀k.
(22)
We apply these coupled evolution equations until convergence. 312

IEEE
Proo
f
6 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
Fig. 7. Test images and their manual segmentation (in black line).
V. EXPERIMENTAL RESULTS AND DISCUSSION313
In previous work, we have tested the method on various314
optic textures (Brodatz textures). The method was compared315
to other texture-classification methods, and some results are316
reported in [39] and [40]. Here, we evaluate the proposed317
seabed-segmentation technique for different real sonar images318
acquired by a sidescan sonar, as part of a natural seabed-319
mapping project (IFREMER, Rebent Project) [41]. A reference320
interpretation by an expert is available [41]. Fig. 7 shows the321
set of images on which we carried out the experiments. We322
superimposed on these images the manual expert segmentation.323
Image I1 is composed of three seafloor types: rock, mud, and324
marl ripples [41]; I2 of rock, marl ripples, and mud seafloors;325
I3 of mud, sand, and marl ripples; I4 of marl and marl ripples;326
and I5 of sand, sand ripples, and rock. For I2 and I3, the angular327
variability of the sefloors, particularly marl ripples (for I2) and328
marl (for I3), is visually clear.329
For all these images, we first determine the most discriminant330
features among the initial set of 219 features: We apply the331
algorithm described in Section II and detailed in [39], and332
we keep only the feature set such that the cumulative sum333
of weights exceeds 0.9. Only a small number of features are334
retained. For example, Fig. 8 shows the plot of feature weights335
computed for image I1 and I5. For I1, the two cooccurrence336
matrices account for more than 90% of the total weight sum;337
these cooccurrence are computed for parameters (dx, dy) ∈338
{(1, 4), (2, 1)}. For I5, the cooccurrence distributions com-339
puted for parameters (dx, dy) ∈ {(2, 1), (2, 2)} are selected.340
For sonar images, we noticed that cooccurrence matrices are the341
Fig. 8. Feature weights. 1 → 121 cooccurrence distributions, 122 → 171Gabor filter-based features and 172 → 219 wavelet-based distributions.(a) I1. (b) I5.
TABLE ISEGMENTATION ERROR RATES
most selected features. In previous work on Brodatz textures 342
[39], [40], we remarked that Gabor and wavelet filters were 343
selected for oriented textures, whereas cooccurrence distribu- 344
tions, which, in addition to the detection of texture structures, 345
detect the intensity values change, are selected in the case of 346
texture having different intensity values and texture with regular 347
motifs. 348
For the five test images, three segmentation algorithms are 349
compared. 350
1) The maximum-likelihood (ML) segmentation denoted by 351
ML. This method consists in maximizing at each pixel the 352
conditional probability p(ys/xs) given by (8) 353
x̂s = arg maxk
p(ys/xs = k). (23)
Several analysis-window sizes are compared: TW ∈ {7 × 354
7, 17 × 17, 33 × 33}. 355
2) The MMP segmentation described in Section III, applied 356
for several analysis-window sizes: TW ∈ {7 × 7, 17 × 357
17, 33 × 33}. 358
3) The region-based variational segmentation described in 359
Section IV that we denote by V ar. 360
Table I summarizes the different error classification rates for all 361
segmentations. 362
All segmentation methods give quite good results according 363
to the mean classification error rates. MMP and variational 364
approaches are more efficient than the ML-based segmentation 365
because they take into account the spatial dependence between 366
pixels. The difference between these later approaches (MMP 367
and variational methods) mainly lies in the accuracy of the 368
localization of region boundaries and in the dependence of 369
MMP-based segmentation on the window size TW . In fact, 370
for the MMP segmentation, the use of small neighborhood 371
(TW = 7 × 7) leads to more accurate region frontiers but 372
small misclassified patches appear because of the neighborhood 373

IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 7
Fig. 9. MMP segmentation of I1 using TW = 7 × 7, τ = 12.5%.
Fig. 10. MMP segmentation of I1 using TW = 17 × 17, τ = 9.2%.
inefficiency for texture characterization. Conversely, the use374
of large window sizes (TW = 33 × 33) resorts to a lack of375
accuracy in the localization of the boundaries of the seabed376
regions because texture features extracted for pixels close to377
region boundaries involve a mixture of texture characteris-378
tics. The variational region-based approach does not need the379
choice of an analysis window and operates globally on region380
composed of pixels belonging to the same class. It resorts381
to a tradeoff between segmentation accuracy and region ho-382
mogeneity. Figs. 9–13 show examples of the dependence of383
MMP segmentation on the sizes of analysis window and on the384
robustness of the variational approach. In Fig. 14, we plot the385
mean error rate for different window sizes.386
We note that MMP and variational segmentations give sim-387
ilar results when the analysis-window size is well chosen for388
instance, TW = 17 × 17 for image I2 (Figs. 15 and 16), but389
its performance depends a lot on the choice of this parameter.390
This method can however be appropriate when the aim of the391
segmentation is to detect texture regions and without seeking392
for accurate boundaries.393
The variational approach is also interesting because it is394
much faster than the MMP segmentation. Being deterministic,395
the variational approach can be very fast particularly if we use396
appropriate initialization such as an initial segmentation based397
on the ML criterion. Whereas the MMP segmentation needs398
Fig. 11. MMP segmentation of I1 using TW = 33 × 33, τ = 13%.
Fig. 12. Region-based segmentation of I1, τ = 7.5%.
a large number of iterations, each iteration is also complex 399
and involves Gibbs sampling. For our implementations, the 400
convergence time of a variational image typically corresponds 401
to one iteration of the MMP algorithm. 402
To stress the interest of taking into account texture variability 403
with respect to incidence angles, additional segmentation re- 404
sults are reported for image I2 and I3 for which the seafloor 405
texture variability is clearer. In Table II, we summarize the 406
segmentation error rates for the segmentation with (J = 3) and 407
with no angular weighting, i.e., using only one angular domain 408
J = 1, for ML, MMP, and variational methods. In Figs. 17 and 409
18 are reported the associated segmentation results. It can be 410
noticed that a classical segmentation (without taking into ac- 411
count texture variability within incidence angles) cannot distin- 412
guish between visually similar seafloors (mud and marl ripples 413
for I2 and marl and sand for I3) near the specular domain. 414
VI. CONCLUSION 415
We proposed two segmentation algorithms for sonar-image 416
segmentation: a Bayesian algorithm using local statistics and a 417
region-based variational algorithm, both based on a novel sim- 418
ilarity measure between seafloor-type images according to the 419
statistics of their responses to a large set of filters. This similar- 420
ity measure is expressed as a weighted sum of Kullback–Leibler 421

IEEE
Proo
f
8 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
Fig. 13. Segmentations of I4. (a) MMP: TW = 7, τ = 4%. (b) MMP: TW = 33, τ = 6%. (c) Variational method: τ = 3%.
Fig. 14. Mean segmentation error rate for several window sizes.
Fig. 15. MMP-based segmentation of I2 TW = 17, τ = 4%.
divergences between individual seafloor filter-response statis-422
tics. The resulting weighting factors are exploited on the one423
hand for filter selection and, on the other hand, for taking424
into account the incidence angular dependence of seafloor tex-425
tures. The conclusion is the cooccurrence matrices outperform426
the other features for our sonar images. The results show427
that the performance of the Bayesian approach depends on428
the size of the analysis window. For pixel-based segmenta-429
tion (ML and MMP segmentations), the size must be tuned430
according to the coarseness of given textures. The results431
also stress the suitability of the region-based approach as432
compared to the Bayesian pixel-based scheme for texture seg-433
mentation and demonstrate the interest of taking into account434
Fig. 16. Variational-based segmentation of I2, τ = 3%.
TABLE IISEGMENTATION ERROR RATES
Fig. 17. I2 region-based segmentation with and without angular weighting.(a) J = 1, τ = 23.5%. (b) J = 3, τ = 3%.
Fig. 18. I3 MMP-based segmentation with and without angular weighting.(a) J = 1, τ = 16%. (b) J = 3, τ = 8%.
the angular backscatter variabilities to discriminate between 435
seafloor types particularly near the specular sector. 436

IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 9
APPENDIX437
EVOLUTION EQUATION COMPUTATION438
Using the shape-derivative tools, we want to differentiate the439
functional440
F (Ωk) = KLΘw
(Qk,D(Ωk)
)which can be written as follows:441
J∑j=1
F∑f=1
πΩk(j)w2
f
∫Rf
Qkf,j(α) log
(Qk
f,j(α)Df,j(Ωk, α)
)dα.
Let us introduce the following notations.442
1)443
Hkj = Qk
f,j(α) log
(Qk
f,j(α)Df,j(Ωk, α)
).
2)444
G1 =∫Ωk
p(Θj/zs)gσf(hf (s) − α) ds.
Then, we have445
F (Ωk) =J∑
j=1
F∑f=1
w2fπΩk
(j)∫
Rf
Hkj .
The Gâteaux derivative of F (Ωk) in the direction of a vector446
field �V is given by447
dF (Ωk, �V ) =J∑
j=1
F∑f=1
w2fdπΩk
(j)(Ωk, �V )∫
Rf
Hkj dα
+ πΩk(j)
∫Rf
dHkj (Ωk, �V )dα. (24)
Theorem: See [37].448
The Gâteaux derivative of a functional of the type K(Ω) =449 ∫Ω k(s,Ω)ds is given by450
dK(Ω, �V ) =∫Ω
ksh(s,Ω, �V )ds −∫Γ
k(s,Ω)(�V �N)da(s)
where Ω denoted a region and Γ its boundary; ksh(s,Ω, �V ) is451
the shape derivative of k(s,Ω).452
In our case453
dπΩk(j)(Ωk, �V ) = −
∫Γk
p(Θj/zs)(�V · �Nk)d�a(s)
Hkj can be written as454
Hkj = Qk
f,j(α) log
(πΩk
(j)Qkf,j(α)
G1(Ωk, f, j, α)
).
Using the chain rule, we get 455
dHkj (Ωk, �V )=
(∂Hk
j
∂G1dG1(Ωk, �V )+
∂Hkj
∂πΩk(j)
dπΩk(j)(Ωk, �V )
)
∂Hkj
∂G1= −
Qkf,j
G1
∂Hkj
∂πΩk(j)
=Qk
f,j
πΩk(j)
.
According to the previous theorem, we get 456
dG1(Ωk, �V ) = −∫Γk
p(Θj/zs)gσf(hf (s) − α) (�V · �Nk)d�a(s).
Finally, we get 457
dHkj (Ωk, �V )
=∫Γk
p(Θj/zs)
[Qk
f,j(α)G1(f, α,Ωk)
gσf(hf (s) − α) − Qf (α)
πΩk(j)
]
× (�V · �Nk)d�a(s)
=1
πΩk(j)
∫Γk
p(Θj/zs)
[Qk
f,j(α)Df,j(Ωk, α)
gσf(hf (s)−α) Qf (α)
]
× (�V · �Nk)d�a(s)∫
Rf
dHkj (Ωk, �V )dα
=1
πΩk(j)
∫Γk
p(Θj/zs)
[Qk
f,j
Df,j(Ωk)∗ gσf
(hf (s)) − 1
]
× (�V · �Nk)d�a(s).
Finally, according to (24) 458
dF (Ωk, �V )
= −J∑
j=1
F∑f=1
p(Θj/zs)w2f
×∫Γk
[KL
(Qk
f,j ,Df,j
)−
(Qk
f,j
Df,j(Ωk)−1
)∗ gσf
(hf (s))
]
×(
�V · �Nk
)d�a(s).
REFERENCES 459
[1] P. Brehmer, F. Gerlotto, J. Guillard, F. Sanguinède, Y. Guénnegan, and 460D. Buestel, “New applications of hydroacoustic methods for monitoring 461shallow water aquatic ecosystems: The case of mussel culture grounds,” 462Aquat. Living Resour., vol. 16, no. 3, pp. 333–338, Jul. 2003. 463
[2] M. Mignotte, C. Collet, P. Perez, and P. Bouthemy, “Hybrid genetic 464optimization and statistical model based approach for the classification 465of shadow shapes in sonar imagery,” IEEE Trans. Pattern Anal. Mach. 466Intell., vol. 22, no. 2, pp. 129–141, Feb. 2000. 467

IEEE
Proo
f
10 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 12, DECEMBER 2008
[3] L. Hellequin, J. M. Boucher, and X. Lurton, “Processing of high-468frequency multibeam echo sounder data for seafloor characterization,”469IEEE J. Ocean. Eng., vol. 28, no. 1, pp. 78–89, Jan. 2003.470
[4] G. Le Chenadec and J. M. Boucher, “Sonar image segmentation us-471ing the angular dependence of backscattering distributions,” in Proc.472Oceans—Europe, Brest, France, 2005, vol. 1, pp. 147–152.473
[5] G. Le Chenadec, J.-M. Boucher, and X. Lurton, “Angular dependence474of K-distributed sonar data,” IEEE Trans. Geosci. Remote Sens., vol. 45,475no. 5, pp. 1224–1236, May 2007.476
[6] E. Jakeman, “Non-Gaussian models for the statistics of scattered waves,”477Adv. Phys., vol. 37, no. 5, pp. 471–529, Oct. 1988.478
[7] A. P. Lyons and D. A. Abraham, “Statistical characterization of high-479frequency shallow-water seafloor backscatter,” J. Acoust. Soc. Amer.,480vol. 106, no. 3, pp. 1307–1315, Sep. 1999.481
[8] D. A. Abraham and A. P. Lyons, “Novel physical interpretations of482k-distributed reverberation,” IEEE J. Ocean. Eng., vol. 27, no. 4, pp. 800–483813, Oct. 2002.484
[9] N. C. Mitchell, “Processing and analysis of Simrad multibeam sonar485data,” Mar. Geophys. Res., vol. 18, no. 6, pp. 729–739, Dec. 1996.486
[10] G. Le Chenadec, J. M. Boucher, X. Lurton, and J. M. Augustin, “Angular487dependence of statistical distributions for backscattered signals: Model-488ing and application to multibeam echosounder data,” in Proc. Oceans,489Sep. 2003, vol. 2, pp. 897–903.490
[11] D. R. Jackson, D. P. Winbrenner, and A. Ishimaru, “Application of the491composite roughness model to high-frequency bottom backscattering,”492J. Acoust. Soc. Amer., vol. 79, no. 5, pp. 1410–1422, May 1986.493
[12] C. de Moustier and D. Alexandrou, “Angular dependence of 12-kHz494seafloor acoustic backscatter,” J. Acoust. Soc. Amer., vol. 90, no. 1,495pp. 522–531, Jul. 1991.496
[13] J. E. Hughes-Clarke, “Toward remote seafloor classification using the497angular response of acoustic backscatter: A case study from multiple498overlapping GLORIA data,” IEEE J. Ocean. Eng., vol. 19, no. 1, pp. 112–499127, Jan. 1994.500
[14] E. Pouliquen and X. Lurton, “Automated sea-bed classification system for501echo-sounders,” in Proc. Oceans, Oct. 1992, vol. 1, pp. 317–321.502
[15] D. Langer and M. Herbert, “Building qualitative elevation maps from side503scan sonar data for autonomous underwater navigation,” in Proc. IEEE504Int. Conf. Robot. Autom., Apr. 1991, vol. 3, pp. 2478–2483.505
[16] R. Li and S. Pai, “Improvement of bathymetric data bases by shape from506shading technique using side-scan sonar images,” in Proc. OCEANS,507Oct. 1991, vol. 1, pp. 320–324.508
[17] E. Dura, J. Bell, and D. Lane, “Reconstruction of textured seafloors from509side-scan sonar images,” Proc. Inst. Elect. Eng.—Radar Sonar Navig.,510vol. 151, no. 2, pp. 114–125, Apr. 2004.511
[18] A. E. Johnson and M. Hebert, “Seafloor map generation for autonomous512underwater vehicle navigation,” Auton. Robots, vol. 3, no. 2, pp. 145–168,513Jun. 1996.514
[19] R. Zhang, P. Tsai, J. E. Cryer, and M. Shah, “Shape from shading:515A survey,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 21, no. 8, pp. 690–516705, Aug. 1999.517
[20] T. H. Eggen, “Acoustic sediment classification experiment by means518of multibeam echosounders,” Acoust. Classification Mapping Seabed,519vol. 15, no. 2, pp. 437–444, 1993.520
[21] L. M. Linnett, S. J. Clarke, and D. R. Carmichael, “The analysis of521sidescan sonar images for seabed types and objects,” in Proc. 2nd Eur.522Conf. Underwater Acoust., 1994, vol. 22, pp. 187–194.523
[22] M. Lianantonakis and Y. R. Petillot, “Sidescan sonar segmentation using524active contours and level set method,” in Proc. OCEANS—Europe, Brest,525France, 2005, vol. 1, pp. 719–724.526
[23] L. Xiuwen and W. DeLiang, “Texture classification using spectral his-527tograms,” IEEE Trans. Image Process., vol. 12, no. 6, pp. 661–670,528Jun. 2003.529
[24] O. G. Cula and K. Dana, “3D texture recognition using bidirectional530feature histograms,” Int. J. Comput. Vis., vol. 59, no. 1, pp. 33–60,531Aug. 2004.532
[25] R. Fablet and P. Bouthemy, “Motion recognition using nonparametric im-533age motion models estimated from temporal and multiscale co-occurrence534statistics,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 25, no. 12,535pp. 1619–1624, Dec. 2003.536
[26] P. Nammalwar, O. Ghita, and P. F. Whelan, “Integration of feature distrib-537utions for colour texture segmentation,” in Proc. Int. Conf. Pattern Recog.,538Aug. 2005, vol. 1, pp. 716–719.539
[27] Q. Xu, J. Yang, and S. Ding, “Texture Segmentation using LBP embedded540region competition,” Electron. Lett. Comput. Vis. Image Anal., vol. 5,541no. 1, pp. 41–47, 2004.542
[28] S. Kullback, “On information and sufficiency,” in The Annals of Mathe-543matical Statistics, vol. 22. New York: Wiley, 1951.544
[29] E. Parzen, “On estimation of a probability density function and mode,” 545Ann. Math. Stat., vol. 33, no. 3, pp. 1065–1076, Sep. 1962. 546
[30] R. M. Haralick, “Statistical and structural approaches to texture,” Proc. 547IEEE, vol. 67, no. 5, pp. 786–804, May 1979. 548
[31] S. Geman and G. Geman, “Stochastic relaxation, Gibbs distributions, and 549the Bayesian restoration of images,” IEEE Trans. Pattern Anal. Mach. 550Intell., vol. PAMI-6, no. 6, pp. 721–741, Nov. 1984. 551
[32] J. Marroquin, S. Mitter, and T. Poggio, “Probabilistic solution of ill-posed 552problems in computational vision,” J. Am. Stat. Assoc., vol. 82, no. 397, 553pp. 76–89, Mar. 1987. 554
[33] M. Kass, A. Withkin, and D. Terzopoulos, “Snakes: Active contour mod- 555els,” Int. J. Comput. Vis., vol. 1, no. 4, pp. 321–331, Jan. 1988. 556
[34] J. A. Sethian, Level Set Methods. Cambridge, U.K.: Cambridge Univ. 557Press, 1996. 558
[35] J. F. Aujol, G. Aubert, and L. Blanc-Féraud, “Wavelet-based level set evo- 559lution for classification of textured images,” IEEE Trans. Image Process., 560vol. 12, no. 12, pp. 1634–1641, Dec. 2003. 561
[36] C. Samson, L. Blanc-Féraud, G. Aubert, and J. Zerubia, “A level set 562method for image classification,” Int. J. Comput. Vis., vol. 40, no. 3, 563pp. 187–197, 2000. 564
[37] S. Jehan-Besson, M. Barlaud, and G. Aubert, “Image segmentation using 565active contours: Calculus of variations or shape gradients?” SIAM J. Appl. 566Math., vol. 63, no. 6, pp. 2128–2154, 2003. 567
[38] H. K. Zhao, T. Chan, B. Merriman, and S. Osher, “A variational level 568set approach to multiphase motion,” J. Comput. Phys., vol. 127, no. 1, 569pp. 179–195, Aug. 1996. 570
[39] I. Karoui, R. Fablet, J. M. Boucher, and J. M. Augustin, “Separability- 571based Kullback divergence weighting and filter selection for texture clas- 572sification and segmentation,” in Proc. 18th ICPR, Hong Kong, Aug. 2006. 573
[40] I. Karoui, R. Fablet, J. M. Boucher, W. Pieczynski, and J. M. Augustin, 574“Fusion of textural statistics using a similarity measure: Application 575to texture recognition and segmentation,” Pattern Anal. Appl., vol. 11, 576no. 3/4, pp. 425–434, Sep. 2008. Computer Science. 577
[41] A. Ehrhold, D. Hamon, and B. Guillaumont, “The Rebent monitor- 578ing network, a spatially integrated, acoustic approach to surveying 579nearshore macrobenthic habitats: Application to the bay of Concarneau 580(South Brittany, France),” ICES J. Mar. Sci., vol. 63, no. 9, pp. 1604– 5811615, Jan. 2006. 582
[42] W. Pieczynski, “Statistical image segmentation,” Mach. Graph. Vis., 583vol. 1, no. 2, pp. 261–268, 1992. 584
Imen Karoui received the M.Sc. degree in telecom- 585munications from École Polytechnique de Tunis, 586Tunisia, in 2002, the D.E.A. degree in STIR (sig- 587nal, télécommunications, images, radar) from the 588Université de Rennes 1, Rennes, France, in 2003, 589and the Ph.D. degree in signal processing and 590telecommunications from the Department of Signal 591and Communications, École Nationale Supérieure 592des Télécommunications de Bretagne (Telecom 593Bretagne), Brest Cedex 3, France, in 2007. 594
She is currently a Postdoctor with Telecom 595Bretagne. Her research interests include texture analysis and segmentation with 596application to acoustic imaging and fisheries. 597
Ronan Fablet receive the M.Sc. degree in signal 598processing and telecommunications from École Na- 599tionale Supérieure de l’Aéronautique et de l’Espace, 600Toulouse Cedex 4, France, in 1997 and the Ph.D. 601degree in signal processing and telecommunications 602from the University of Rennes 1, Rennes, France, 603in 2001. 604
In 2002, he was an INRIA Postdoctoral Fellow 605with Brown University, Providence, RI. From 2003 606to 2007, he had a full-time research position with the 607Institut Français de Recherche et d’Exploitation de 608
la Mer, Brest, France, in the field of biological oceanography. Since 2008, he 609has been an Assistant Professor with the Department of Signal and Commu- 610nications, École Nationale Supérieure des Télécommunications de Bretagne, 611Brest Cedex 3, France. His main interests include sonar and radar imaging 612particularly applied to biological and physical oceanography and signal and 613image processing applied to biological archives. 614

IEEE
Proo
f
KAROUI et al.: SEABED SEGMENTATION USING OPTIMIZED STATISTICS OF SONAR TEXTURES 11
Jean-Marc Boucher (M’83) was born in 1952.615He received the M.Sc. degree in telecommunica-616tions from École Nationale Supérieure des Télé-617communications, Paris, France, in 1975 and the618Habilitation à Diriger des Recherches degree from619the University of Rennes 1, Rennes, France, in 1995.620
He is currently a Professor with the Department621of Signal and Communications, École Nationale622Supérieure des Télécommunications de Bretagne,623Brest Cedex 3, France, where he is also an Education624Deputy Director. He is also the Deputy Manager of625
a National Scientific Research Center Laboratory (Institut Telecom-Telecom626Bretagne-UMR CNRS 3192 lab-STICC, Université Européenne de Bretagne-627France). His current researches are related to statistical signal analysis, in-628cluding estimation theory, Markov models, blind deconvolution, wavelets,629and multiscale-image analysis. These methods are applied to radar and sonar630images, seismic signals, and electrocardiographic signals. He published about631a hundred technical articles in these areas in international journals and632conferences.633
Jean-Marie Augustin received the Master degree in 634signal processing from the University of Rennes 1, 635Rennes, France, in 1982. 636
Since 1984, he has been with the Institut Français 637de Recherche et d’Exploitation de la Mer, Brest, 638France, the French public institute for marine re- 639search, where he is currently a Senior Engineer 640with the Department of Acoustics and Seismics. 641His main interests include software development for 642sonar seafloor mapping and backscatter reflectivity 643analysis. 644




















