Satellite formation flying using along-track thrust
12
Acta Astronautica 61 (2007) 553 – 564 www.elsevier.com/locate/actaastro Satellite formation flying using along-track thrust K.D. Kumar a , ∗ , H.C. Bang b , M.J. Tahk b a Department of Aerospace Engineering, Ryerson University, 350 Victoria Street, Toronto, Ont., Canada M5B 2K3 b Department of Aerospace Engineering, Korea Advanced Institute of Science and Technology, 373-1 Kusong-dong,Yusong-gu, Taejeon 305-701, Republic of Korea Received 14 June 2005; received in revised form 22 December 2006; accepted 22 January 2007 Available online 16 April 2007 Abstract The formation flying of satellites using thrust in along-track direction is explored in the present paper. The system comprising of a leader and a follower satellite is considered and a linear controller is developed to achieve a desired formation. The performance of the proposed controller is tested using numerical simulation of the governing nonlinear system equations of motion considering several factors including variations in initial conditions, formation size, presence of disturbance forces, and orbital eccentricity of the leader satellite. It is found that the controller using only along-track thrust can provide bounded relative position errors with the maximum control acceleration, in m/s 2 , of 0.0718 times the product of square of the orbital rate of the leader satellite and the along-track error. The proposed controller was successful in establishing circular as well as projected circular formations of leader and follower satellites within relative position errors of ± 10 m. © 2007 Elsevier Ltd. All rights reserved. 1. Introduction The formation flying of satellites has been identi- fied as an enabling technology for many future space missions [1–4]. Compared to a single spacecraft mis- sion, this approach has several advantages including the ability to enhance and/or enable missions through longer baseline observations, high failure tolerance, being real-time reconfigurable, adaptable to highly dynamic demands, and lower life cycle cost [4]. How- ever, its development involves tremendous challenges ranging from spacecraft formation initialization to re- configuration, coordination, and formation trajectory generation. Satellite mass, power, fuel, and communic- ∗ Corresponding author. Tel.: +1 416 979 5000x4908; fax: +1 416 979 5056. E-mail address: [email protected] (K.D. Kumar). 0094-5765/$ - see front matter © 2007 Elsevier Ltd. All rights reserved. doi:10.1016/j.actaastro.2007.01.069 ations are significant constraints and the guidance, navigation, and control (GNC) tasks become highly complicated for larger formations. The satellite forma- tion flying may experience environmental disturbances from gravitational perturbation, atmospheric drag, solar radiation pressure and electromagnetic forces. With a view to tackle these challenges, innovative methods for achieving satellite formation flying with the minimum station keeping requirements are sought. The formation flying dynamics has been studied using orbital elements [5–8] as well as relative Carte- sian coordinates [9–22] (Fig. 1). Several investigations [9–12] considered linearized relative motion equations in a Cartesian coordinate frame, called the Hill’s Equa- tions [9] or the Clohessy–Wiltshire equations [10]. Satellite formation initialization is an important step in achieving a desired formation. Several researchers in- cluding Sabol et al. [12], Inalhan et al. [13], and Vaddi et al. [14] have discussed about this problem with
Transcript of Satellite formation flying using along-track thrust

Acta Astronautica 61 (2007) 553–564www.elsevier.com/locate/actaastro
Satellite formation flying using along-track thrust
K.D. Kumara,∗, H.C. Bangb, M.J. Tahkb
aDepartment of Aerospace Engineering, Ryerson University, 350 Victoria Street, Toronto, Ont., Canada M5B 2K3bDepartment of Aerospace Engineering, Korea Advanced Institute of Science and Technology, 373-1 Kusong-dong, Yusong-gu,
Taejeon 305-701, Republic of Korea
Received 14 June 2005; received in revised form 22 December 2006; accepted 22 January 2007Available online 16 April 2007
Abstract
The formation flying of satellites using thrust in along-track direction is explored in the present paper. The system comprisingof a leader and a follower satellite is considered and a linear controller is developed to achieve a desired formation. Theperformance of the proposed controller is tested using numerical simulation of the governing nonlinear system equations ofmotion considering several factors including variations in initial conditions, formation size, presence of disturbance forces, andorbital eccentricity of the leader satellite. It is found that the controller using only along-track thrust can provide bounded relativeposition errors with the maximum control acceleration, in m/s2, of 0.0718 times the product of square of the orbital rate of theleader satellite and the along-track error. The proposed controller was successful in establishing circular as well as projectedcircular formations of leader and follower satellites within relative position errors of ± 10 m.© 2007 Elsevier Ltd. All rights reserved.
1. Introduction
The formation flying of satellites has been identi-fied as an enabling technology for many future spacemissions [1–4]. Compared to a single spacecraft mis-sion, this approach has several advantages includingthe ability to enhance and/or enable missions throughlonger baseline observations, high failure tolerance,being real-time reconfigurable, adaptable to highlydynamic demands, and lower life cycle cost [4]. How-ever, its development involves tremendous challengesranging from spacecraft formation initialization to re-configuration, coordination, and formation trajectorygeneration. Satellite mass, power, fuel, and communic-
∗ Corresponding author. Tel.: +1 416 979 5000x4908;fax: +1 416 979 5056.
E-mail address: [email protected] (K.D. Kumar).
0094-5765/$ - see front matter © 2007 Elsevier Ltd. All rights reserved.doi:10.1016/j.actaastro.2007.01.069
ations are significant constraints and the guidance,navigation, and control (GNC) tasks become highlycomplicated for larger formations. The satellite forma-tion flying may experience environmental disturbancesfrom gravitational perturbation, atmospheric drag, solarradiation pressure and electromagnetic forces. With aview to tackle these challenges, innovative methods forachieving satellite formation flying with the minimumstation keeping requirements are sought.
The formation flying dynamics has been studiedusing orbital elements [5–8] as well as relative Carte-sian coordinates [9–22] (Fig. 1). Several investigations[9–12] considered linearized relative motion equationsin a Cartesian coordinate frame, called the Hill’s Equa-tions [9] or the Clohessy–Wiltshire equations [10].Satellite formation initialization is an important step inachieving a desired formation. Several researchers in-cluding Sabol et al. [12], Inalhan et al. [13], and Vaddiet al. [14] have discussed about this problem with

554 K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564
ρ
Inertial Reference Frame
r
rc
O
x
y
S
X
Y
Z
θ
Earth
Perigee
z
Follower Satellite
Leader Satellite
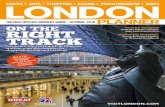
Fig. 1. Geometry of orbit motion of leader and follower satellites.
reference to the relative Cartesian coordinates. Inalhanet al. [13] described a initialization procedure for for-mation with eccentric reference orbits. The initial con-ditions accommodating corrections due to nonlinearityas well as eccentricity have been presented by Vaddiet al. [14].
The problem of satellite formation keeping andreconfiguration has been examined based on impulsivecontrol [6–8,15,16] as well as continuous thrust control[11,17–21]. Schaub and Alfriend [6] proposed impul-sive feedback control laws for establishment of a de-sired set of mean-element differences. A two-impulsesolution is suggested by Vaddi et al. [7] for achievingthe desired formation characterized by orbital-elementdifferences. Vassar and Sherwood [15] presented im-pulsive control for leader and follower satellites in acircular orbit using a Cartesian coordinate model. Anoptimal impulse control of relative satellite motion isdescribed by Wiesel [16] and the resulting optimizationproblem is solved numerically. Sparks [8] analyzeddiscrete-time, linear feedback control for satellite for-mation keeping, whereas Irvin and Jacques [17] com-pared linear and nonlinear feedback control laws, aswell as continuous and discrete burn techniques for thesatellite formation reconfiguration. A tracking controldesign using sliding mode techniques is derived byYeh et al. [18] to control a desired satellite formation.Mitchell and Richardson [19] applied a method basedon invariant manifold tracking for controlling first-ordernonlinear Hill’s equations. The application of fuzzyfor formation control is considered by Qingsong et al.[11]. de Quierpoz [20] presented a Lyapunov-based,nonlinear, adaptive controller for multiple spacecraftformation flying.
The satellite formation using no radial thrust has alsobeen examined [21,22]. This investigation might havebeen prompted because of fuel efficiency, propulsionsystem simplifications, and weight reduction in achiev-ing desired formation. Leonard et al. [21] applied along-track input in the form of differential drag. A nonlinearalgorithm based on the control values −a, 0, and +a,where a is the magnitude of the differential drag accel-erations, is considered for achieving desired maneuvers.Starin et al. [22] considered linear-quadratic regulators(LQR) with no radial axis inputs using a Cartesian coor-dinate model. A linear control algorithm is designed toachieve along-track control trajectory for desired pro-jected circular formation based on the follower satel-lite position and velocity relative to the leader satellite.Several linear controllers are compared based on perfor-mance factors that include the time required to completethe maneuver, the maximum control acceleration, andthe total fuel consumed during the maneuver. The linearstability analysis which is important for understandingunderlying system dynamics, was not undertaken andthe stability conditions were not stated. In addition, theeffects of several factors (that include formation size,random changes in initial state conditions, disturbanceforce accelerations, the leader satellite orbit eccentric-ity) were not considered. These issues are examined inthis paper.
In the present investigation, we investigate the feasi-bility of achieving desired formation using only along-track thrust control. A linear controller is developedbased on the linear system model and the stability anal-ysis. The major contributions are the synthesis of a sim-ple along-track thrust controller based on only the rel-ative along-track position error between the leader andfollower satellites and its applications to circular as wellas projected circular formations considering the effectsof orbital eccentricity of the leader satellite, disturbanceforces, and disturbances in initial formation conditions.
The body of this paper consists of three main sectionsfollowed by a conclusions section. Section 2 presentsthe system equations of motion. In Section 3, a linearcontroller is derived. Finally, for a detailed assessmentof the control strategy, the set of exact governing equa-tions of motion is numerically integrated and the ef-fects of various parameters on the system response areexamined in Section 4.
2. System equations of motion
The system comprises of a leader satellite and a fol-lower satellite (Fig. 1). The orbital motion of the leadersatellite is defined by a radial distance rc from the

K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564 555
Table 1Stability conditions for control gains
Sl. no. Gains Stability conditions Remarks
kp1 kd1 kp2 kd2
1 �= 0 0 0 0 kp1 < 0, kp1 > 0 Unstable for any kp1
2 0 �= 0 0 0 kd1 < �/2 Unstable for kd1 as two eigenvalues are zero3 �= 0 �= 0 0 0 kd1 < �/2, kd2 < 0, kd2 > 0 Unstable for any kd1
4 0 0 �= 0 0 0 < kp2 < 0.0718�2
Marginally stable for kp2
5 0 0 0 �= 0 kd2 < 0, kd2 > 0 Unstable for any kd2
6 0 0 �= 0 �= 0 0 < kp2 < �2, kd2 < 0,kd2 > 0 Unstable for any kd2
7 �= 0 �= 0 0 �= 0 kd1 < �/2, kd1 > �/2, Unstable for any kd1
−kd2(kd1 − 2�) < kp1 < − 3kd2�/2, kd2 < 08 �= 0 �= 0 �= 0 �= 0 kd2(kd1 − 2�) < kp1 < − kd2�/2, Unstable for any kd1 and kp2
kd1 < �/2, kd1 > �/2,
0 < kp2 < �2 − 2�kd1,kp2 > �
2 − 2�kd1, kd2 < 0
center of the Earth and a true anomaly �. The motionof the follower satellite is described with relative to themotion of the leader satellite by a relative frame S-xyzfixed at the center of the leader satellite. The x-axispoints along the local vertical, the z-axis is taken alongnormal to the orbital plane, and the y-axis represents thethird axis of this right-handed frame taken. The orbitalequations of motion for the leader satellite and the rel-ative equations of motion of the follower satellite withrespect to the leader satellite are as follows:
rc − rc�2 + �
r2c
= 0, (1)
rc� + 2�rc = 0, (2)
x − x�2 − 2y� − y� = − �
r3(rc + x) + �
r2c
+ fdx , (3)
y − y�2 + 2x� + x� = − �
r3y + fy + fdy , (4)
z = − �
r3z + fdz, (5)
where r=[(rc+x)2+y2+z2]1/2, fy is the control forceacceleration in along-track direction, and fdj = x, y, z
are the disturbance force accelerations along x, y, and zdirections, respectively.
3. Controller design
In order to design a controller, we derive a linear sys-tem model from the given nonlinear system equationsof motion (Eqs. (3)–(5)) assuming the leader satellitein a circular orbit and taking first-order perturbation for
system variables x, y, and z. The resulting linearizedsystem equations of motion are
x − 2�y − 3�2x = 0, (6)
y + 2x� = fy , (7)
z + �2z = 0, (8)
where � = constant.The preceding equations of motion are called the
Hill’s Equations [10] or the Clohessy–Wiltshire equa-tions [11]. In the present investigation, the along-trackthrust is varied using a simple linear control law givenby
fy = kp1(x − xd) + kd1(x − xd ) + kp2(y − yd)
+ kd2(y − yd ), (9)
where kp1and kp2 are proportional gains while kd1 andkd2 are derivative gains. The xd , xd , yd and yd are de-sired or commanded states. In order to find suitable val-ues of these gains to achieve a stable system response,we examine the characteristic equation of the linear sys-tem defined by Eqs. (6)–(8) along with Eq. (9). As perthe linear system, the relative in-plane motion specifiedby Eqs. (6) and (7) is decoupled from the out-of-planerelative motion (Eq. (8)). The characteristic equationcorresponding to the relative in-plane motion is
s4 − kd2s3 + (�
2 − kp2 − 2�kd1)s2
+ (3�2kd2 − 2�kp1)s + 3�
2kp2 = 0. (10)

556 K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564
0.2
0.4
0.6
x-x
d [m
]
150
100
50
0
y-y
d [m
]
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0
0.1
0.2
0.3
Leader Satellite Orbits
z-z
d [m
]
Fig. 2. Relative position errors without control input for phase � = 0◦: rd = 1 km.
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
-0.5
0
0.5
x-x
d [m
]
-2
-1
0
1
2
y-y
d [m
]
0
0.1
0.2
Leader Satellite Orbits
z-z
d [m
]
Fig. 3. Relative position errors with control input for phase � = 0◦: rd = 1 km.

K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564 557
For the relative out-of-plane motion, we get the charac-teristic equation as
s2 + �2 = 0. (11)
The preceding equation shows the marginal stability ofthe relative out-of-plane motion with eigenvalues:
s = ±j �. (12)
0 5 10 15 20 25 30 35 40 45 50
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Leader Satellite Orbits
f y [m
/s2]
x 10-7
Fig. 4. Control input for phase � = 0◦: rd = 1 km.
0
0.04
0.08
40
20
0
y-y
d [m
]
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0
0.05
0.1
0.15
Leader Satellite Orbits
z-z
d [m
]x-x
d [m
]
Fig. 5. Relative position errors without control input for phase � = 90◦: rd = 1 km.
The above complex eigenvalues relate to the period ofthe z-oscillation as 2�/� s or 1/� orbits of the leadersatellite. Next, we apply the Routh–Hurwitz criterionof absolute stability to the characteristic equation of therelative in-plane motion (Eq. (10)) and the conditionsof stability thus obtained are presented in Table 1 forvarious control gains. Referring to Table 1, there is onlyone case of kp1=kd1=kd2=0, kp2 �= 0 when the systemis marginally stable and eigenvalues corresponding tothis case are obtained as
s1,2 = ± j√2
[�
2 − kp2 +√
k2p2 − 14�
2kp2 + �
4
]1/2
,
s3,4 = ± j√2
[�
2 − kp2 −√
k2p2 − 14�
2kp2 + �
4
]1/2
.
(13)
Referring to Eqs. (13), it is to be noted that as the eigen-values have only imaginary parts, the along-track thrustcontrol can only provide bounded relative positionerrors with no damping. This is an inherent limitation ofapplying only along-track thrust based on the proposedcontrol law for controlling formation. However, in thecase the bounded relative position errors are below aprescribed limit (for example, ±20 m), the proposedcontroller may have viable applications. We will exam-ine these issues in the Results and Discussion section.

558 K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564
-0.2
-0.1
0
0.1
x-x
d [m
]
-0.5
0
0.5
y-y
d [m
]
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0
-0.05
0.1
0.15
Leader Satellite Orbits
z-z
d [m
]
Fig. 6. Relative position errors with control input for phase � = 90◦: rd = 1 km.
0 5 10 15 20 25 30 35 40 45 50
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Leader Satellite Orbits
f y [
m/s
2]
x 10-8
Fig. 7. Control input for phase � = 90◦: rd = 1 km.
The maximum thrust acceleration based on the pro-posed controller is derived as
|fy |max=kp2|y−yd |max=0.0718�2|y−yd |max. (14)
For the case of a leader satellite in a circular orbitof radius 6878 km and the maximum bounded along-track error of 10 m, the maximum thrust available is8.8 × 10−7 m/s2. It is important to note that in the case
the disturbance force accelerations are greater than thismaximum thrust, the proposed controller may fail toprovide any desired satellite formations.
In the present investigation, the desired or com-manded states (xd , xd , yd , yd , zd , zd ) are taken as thesolution of the linear relative equations of motion (Eqs.(6)–(8)) when fj = 0, j = x, y, z, for the projectedcircular formation or circular formation given below:
Projected circular formation:
xd(t) = (rd/2) sin(�mt + �),
yd(t) = rd cos(�mt + �),
zd(t) = rd sin(�mt + �),
xd (t) = (rd �m/2) cos(�mt + �),
yd (t) = −rd �m sin(�mt + �),
zd (t) = rd �m cos(�mt + �). (15)
Circular formation:
xd(t) = (rd/2) sin(�mt + �),
yd(t) = rd cos(�mt + �),
zd(t) = (√
3rd/2) sin(�mt + �),
xd (t) = (rd/2)�m cos(�mt + �),
yd (t) = −rd �m sin(�mt + �),
zd (t) = (√
3�mrd/2) cos(�mt + �), (16)

K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564 559
-0.2
-0.1
0
0.1
x-x
d [m
]
-0.5
0
0.5
y-y
d [m
]
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0 5 10 15 20 25 30 35 40 45 50
0
0.02
0.04
0.06
Leader Satellite Orbits
z-z
d [m
]
Fig. 8. Relative position errors with control for formation size rd = 500 m: � = 0◦.
where rd is the formation size, � is the phase anglebetween the leader and follower satellites, and �mis themean angular velocity and equals to
√�e/a
3 (�e is thegravitational parameter of the Earth; a is semi-majoraxis of the orbit of the leader satellite). In the case theleader satellite is in a circular orbit, �m = �.
4. Results and discussion
To study the performance of the proposed controller,the detailed system response is numerically simulatedusing the equations of motion, Eqs. (1)–(5) and the con-trol law, Eq. (9) along with the desired system statesgiven by Eqs. (15) or (16) as initial states of the sys-tem. The leader satellite is assumed to have an orbitsemi-major axis of 6878 km. The integration is car-ried out using the International Mathematical and Sta-tistical Library (IMSL) routine DDASPG based on thePetzoid–Gear BDF method.
The selection of the control gains kp1, kd1, kp2, andkd2 of the along-track control thrust law, Eq. (9) isimportant for achieving a desired system response. Nu-merous nonlinear simulations were carried out and itwas found that for any nonzero values of kp1 and kd1,the system responses were unstable. In fact, these re-sults match with the conditions of stability presented in
Table 1. For kd2 = 0 and 0 < kp2 < 0.0718�2 = 8.8 ×
10−8, the nonlinear simulation shows stable system re-sponse. Even with kp2 =3×10−8 and |kd2|�2×10−7,the system responses remain stable. The eigenvaluesbeing complex with zero real part remain virtuallythe same for kd2 = 0 as well as |kd2|�2 × 10−7
and this fact might be the reason for no virtual im-provement in the system response with nonzero kd2.Therefore, we consider gains kp1, kd1, and kd2 as nulland kp2 equals to 3 × 10−8 for all numerical simu-lations presented in this paper. It is to be noted herethat the stable response with nonzero kd2 was notpredicted by the Routh–Hurwitz criterion presentedin Table 1.
We first consider the projected circular formationwhen the leader satellite is in a circular orbit. For theformation size of 1 km and a phase angle of 0◦, the sys-tem response without control input shows the maximumabsolute values of radial, along-track, and cross trackerrors of 0.58, 154.17, and 0.31 m, respectively (Fig. 2).In fact, the along-track error has a secular drift increas-ing approximately at a rate of 3.08 m per orbit. How-ever, an application of the proposed along-track thrustcontrol scheme results in a bounded along-track errorwith its maximum absolute value of 2.9 m (Fig. 3). Tounderstand the relative position response, we analyze

560 K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564
-600 -400-200
0 200400
600
15001000
5000
5001000
1500
-1000
0
1000
x [m]
x [m]
y [m]
z [m
]
-1000
0
1000
z [m
]
-600-400 -200
0 200400
600
-1500-1000
-5000500
10001500
y [m]
Without Control Input
With Control Input
Initial Relative Orbit
Fig. 9. Relative orbit for circular formation in 50 orbits of leader satellite: rd = 1 km, � = 0◦.
eigenvalues of the linear system (Eqs. (6)–(8)). UsingEqs. (10) and (11), the in-plane eigenvalues are found tobe s1,2 =±j0.001046, s3,4 =±j0.000317 where as theout-of-plane eigenvalues are s5,6 = ±j0.001068. Thedominant in-plane eigenvalues of s3,4 = ±j0.001046correspond to the period of in-plane motion as 1.06 or-bits. The period of the out-of-plane motion is 1 orbit.In fact, the numerical response of the relative motionmatches with these periods. Fig. 4 shows the controlinput which follows the same profile as of along-trackerror corresponding to the proportional control schemeconsidered here. The maximum along-track thrust ac-celeration is found to be 8.7 × 10−8 m/s2 which isthe same obtained analytically as per the expression|fy |max = kp2|y − yd |max.
When the phase angle is taken as 90◦ (Figs. 5–7),the relative positions errors without control input arefound to be lower than the previous case of �=0◦ with
|x−xd |max=0.09 m, |y−yd |max=51.37 m, |z−zd |max=0.17 m. The along-track error grows approximately ata rate of 1.03 m per orbit which is approximately threetimes less than the case of �=0◦. As expected, the pro-posed controller performs well (Figs. 6 and 7) and isable to control the secular drift in along-track directionwith the maximum value of bounded along-track errorof less than a meter. In the case if the projected circu-lar formation size of 1 km taken in Figs. 2–4 is reducedto 500 m (Fig. 8), the application of the proposed con-troller results in the relative position errors of less thana meter (i.e., |x−xd |max =0.21 m, |y−yd |max =0.73 m,
|z − zd |max = 0.07 m).Next, we apply the proposed controller for a circu-
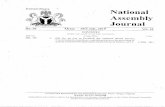
lar formation of leader and follower satellites (Fig. 9).The controller is successful in transforming an unstableformation (without control input) with relative positionerrors of |x − xd |max = 0.5 m, |y − yd |max = 137.04 m,

K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564 561
-1000 -800 -600 -400 -200 0 200 400 600 800 1000 1200
-1000 -800 -600 -400 -200 0 200 400 600 800 1000
-500
0
500
z [m
]
-500
0
500
z [m
]
0 5 10 15 20 25 30 35 40 45 50
-2
-1
0
1
2
Leader Satellite Orbits
f y [m
/s2]
y [m]
x 10-7
Fig. 10. Controller performance as affected by 0.1% random changes in initial state conditions, (a) without control input, and (b) with controlinput: rd = 1 km, � = 90◦.
|z − zd |max = 0.27 m into a stable formation with thebounded relative position errors of |x−xd |max=0.72 m,|y−yd |max =2.57 m, and |z−zd |max =0.25 m. The pro-posed controller as well can be applied for other typeof formations including in-plane formation. It is to benoted that without control input the along-track seculardrift is 2.78 m per orbit (see Fig. 9) which is less thanthe case of projected circular formation of 3.08 per or-bit presented in Fig. 2. Thus, the projected circular for-mation is more demanding and now onwards we willstudy this formation only.
Next, we examine the system response in the pres-ence of errors in the initial state conditions for a pro-jected circular formation (Fig. 10). For an illustration,we assume 0.1% random errors in initial state condi-tions: (x−xd)=−0.48 m, (x−xd )=0 m, (y−yd)=0 m,(y − yd ) = 6.5e − 4 m, (z − zd) = −0.59 m, (z − zd ) =−6.22 m. Fig. 10 shows the bounded relative positionerrors of |x − xd |max = 1.13 m, |y − yd |max = 4.65 m,|z − zd |max = 0.74 m using the proposed con-troller, whereas without control input the errors are
|x − xd |max = 0.97 m, |y − yd |max = 302.4 m, |z −zd |max=0.75 m. Even in the presence of external distur-bance force accelerations, say fdx = −1 × 10−8 m/s2,fdy = 6 × 10−8 m/s2, and fdz = −2 × 10−8 m/s2
(Fig. 11), the proposed controller is able to success-fully reduce the relative position with secular driftsof |x − xd |max = 35 m, |y − yd |max = 7102.5 m,|z − zd |max = 1.03 m without control input to thebounded relative position errors of |x − xd |max = 1 m,|y − yd |max = 5.8 m, |z − zd |max = 0.26 m.
Next, we take up the formation of a leader and fol-lower system when the leader satellite is in an ellipticorbit. We consider the initial along-track y as given inRef. [17]:
y(0) = − �m(2 + e)x(0)
(1 + e)1/2(1 − e)3/2. (17)
As the orbital eccentricity of the leader satellite isincreased from e = 0.001 to 0.01, the relative positionerrors increases, as expected (Fig. 12). Without con-trol input, the relative position errors increase from

562 K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564
-1000 0 1000 2000 3000 4000 5000 6000 7000 8000
-1000
-500
0
500
1000
z [m
]
-1000 -800 -600 -400 -200 0 200 400 600 800
-500
0
500
1000
z [m
]
0 5 10 15 20 25 30 35 40 45 50
-1
0
1
2x 10-7
Leader Satellite Orbits
f y [m
/s2]
y [m]
Initial Relative Orbit
1000
Fig. 11. Controller performance as affected by disturbance force accelerations, (a) without control input, (b) with control input;fdx = −1 × 10−8 m/s2, fdy = 6 × 10−8 m/s2, and fdz = −2 × 10−8 m/s2: rd = 1 km, � = 0◦.
|x − xd |max = 1 m, |y − yd |max = 51.9 m, |z − zd |max =2.1 m at e=0.001 to |x−xd |max =10.5 m, |y−yd |max =59.8 m, |z − zd |max = 22.5 m at e = 0.01. However,with the application of the proposed controller, we havebounded relative position errors of |x −xd |max =1.1 m,|y − yd |max = 1.3 m, |z − zd |max = 2.1 m for e = 0.001,whereas for e = 0.01, the errors are |x − xd |max =10.3 m, |y − yd |max = 8.4 m, |z − zd |max = 22.5 m.Thus, the along-track thrust drastically reduces theerrors in along-track direction and these errors remainbounded.
5. Conclusions
The formation flying of satellites using only along-track thrust is examined in the present paper. A simplelinear controller using relative along-track position er-ror of the follower satellite with respect to the leadersatellite is derived based on the linear stability analy-sis. The feasibility of this controller for desired circular
as well as projected circular formations is establishedby numerical simulations of the governing nonlinearsystem equations of motion considering various condi-tions including changes in formation size, errors in ini-tial conditions, presence of secular disturbance forces,and orbit eccentricity of the leader satellite. However,the proposed controller can only provide bounded rel-ative position errors with no damping. In addition, theproposed controller has the maximum control acceler-
ation, in m/s2, of 0.0718�2
times the along-track errorand thus has a limited authority with regard to neutral-izing disturbance forces. However, with regard to nu-merous simulations conducted and some typical resultspresented in this paper, it was found that the proposedcontroller was successful in achieving the bounded rela-tive position errors below ±10 m as well as neutralizingthe effects of disturbance forces, changes in initial con-ditions, and orbit eccentricities of the leader satellite.Thus, the proposed controller may have viable spaceapplications.

K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564 563
-1000
500
0
500
1000e=0.001
z [m
]
-1000
500
0
500
1000e=0.005
z [m
]
-1000 -800 -600 -400 -200 0 200 400 600 800
-1000
500
0
500
1000e=0.01
z [m
]
y [m]
1000
Fig. 12. Controller performance as affected by leader satellite orbit eccentricity: rd = 1 km, � = 90◦.
Acknowledgment
The authors wish to acknowledge the financial sup-port for this study provided by Canada Research ChairProgram and National Research Laboratory Program(2002, M1-0203-00-006, the Ministry of Science andTechnology, Korea).
References
[1] E.C. Pete Aldridge Jr., C.S. Fiorina, M.P. Jackson, L.A. Leshin,L.L. Lyles, P.D. Spudis, N.D. Tyson, R.S. Walker, M.T. Zuber,A Journey to Inspire, Innovate, and Discover, Report of thePresident’s Commission on Implementation of United StatesSpace Exploration Policy, June 2004.
[2] NASA New Millennium Program, 〈http://nmp.jpl.nasa.gov/〉.[3] M. Campbell, R.R. Fullmer, C.D. Hall, The ION-F formation
flying experiments, Advances in the Astronautical Sciences 105(2000) 135–149.
[4] J.R. Carpenter, J.A. Leitner, D.C. Folta, R.D. Burns, Benchmarkproblems for spacecraft formation flying missions, AIAA Paper2003–5364, August 2003.
[5] H. Schaub, Relative orbit geometry through classical orbitelement differences, Journal of Guidance, Control, andDynamics 27 (5) (2004) 839–848.
[6] H. Schaub, K.T. Alfriend, Impulsive feedback control toestablish specific mean orbit elements of spacecraft formations,Journal of Guidance, Control, and Dynamics 24 (4) (2001)739–745.
[7] S.S. Vaddi, K.T. Alfriend, S.R. Vadali, P. Sengupta, Formationestablishment and reconfiguration using impulsive control,Journal of Guidance, Control, and Dynamics 28 (2) (2005)262–268.
[8] A. Sparks, Linear control of spacecraft formation flying, AIAA2000-4438, August 2000.
[9] G.W. Hill, Researches in the lunar theory, American Journalof Mathematics 1 (1878) 5–26.
[10] W. Clohessy, R. Wiltshire, Terminal guidance systems forsatellite rendezvous, Journal of the Astronautical Sciences 27(9) (1960) 653–658.
[11] M. Qingsong, W. Pengji, Y. Di, Low-thrust fuzzy formationkeeping for multiple spacecraft flying, Acta Astronautica 55(1) (2004) 895–901.
[12] C. Sabol, R. Burns, C.A. McLaughlin, Satellite formation flyingdesign and evolution, Journal of Spacecraft and Rockets 38 (2)(2001) 270–278.
[13] G. Inalhan, M. Tillerson, J.P. How, Relative dynamics andcontrol of spacecraft formations in eccentric orbits, Journal ofGuidance, Control, and Dynamics 25 (1) (2002) 48–59.
[14] S.S. Vaddi, S.R. Vadali, K.T. Alfriend, Formation flying:accommodating nonlinearity and eccentricity perturbations,Journal of Guidance, Control, and Dynamics 26 (2) (2003)214–223.
[15] R.H. Vassar, R.B. Sherwood, Formation keeping for a pair ofsatellites in a circular orbit, Journal of Guidance, Control, andDynamics 8 (2) (1985) 235–242.
[16] W.E. Wiesel, Optimal impulse control of relative satellitemotion, Journal of Guidance, Control, and Dynamics 26 (1)(2003) 74–78.

564 K.D. Kumar et al. / Acta Astronautica 61 (2007) 553–564
[17] D.J. Irvin, D.R. Jacques, Linear vs. nonlinear control techniquesfor the reconfiguration of satellite formations, AIAA Paper2001-4089, August 2001.
[18] H. Yeh, E. Nelson, A. Sparks, Nonlinear tracking controlfor satellite formations, Journal of Guidance, Control, andDynamics 25 (2) (2002) 376–386.
[19] J.W. Mitchell, D.L. Richardson, Invariant manifold trackingfor first-order nonlinear Hill’s equations, Journal of Guidance,Control, and Dynamics 26 (4) (2003) 622–627.
[20] M.S. de Queiroz, V. Kapila, Q. Yan, Adaptive nonlinear controlof multiple spacecraft formation flying, Journal of Guidance,Control, and Dynamics 23 (3) (2000) 385–390.
[21] C.L. Leonard, W.M. Hollister, E.V. Bergmann, Orbitalformation keeping with differential drag, Journal of Guidance,Control, and Dynamics 12 (1) (1989) 108–113.
[22] R.S. Starin, R.K. Yedavalli, A.G. Sparks, Spacecraft formationflying maneuvers using linear-quadratic regulation with noradial axis inputs, AIAA Paper 2001-4029, August 2001.