
Regular and chaotic oscillations of friction force
12
Regular and chaotic oscillations of friction force A Stefan ´ ski 1 , J Wojewoda 1 , M Wiercigroch 2 , and T Kapitaniak 1 1 Division of Dynamics, Technical University of Lo ´dz ´, Lo ´dz ´, Poland 2 Centre for Applied Dynamics Research, University of Aberdeen, King’s College, Aberdeen, UK The manuscript was received on 15 November 2005 and was accepted after revision for publication on 9 December 2005. DOI: 10.1243/09544062C09305 Abstract: In this paper, several friction features and models are discussed in the context of the dynamical nature of friction force observed during experiments. On the basis of experimental and theoretical analysis, the authors show that such behaviour can be considered as a certain representation of the system dynamics. According to this approach, a classification of friction models with respect to their sensitivity on the system motion character is introduced. Next, the results of experimental research are reported. Friction characteristics reconstructed exper- imentally for various types of the system response, i.e. periodic, quasi-periodic, and chaotic, are demonstrated. Finally, these results are compared with numerical simulations using the pro- posed friction model. Keywords: dry friction, dynamics, chaos, experimental studies 1 INTRODUCTION The phenomenon of friction appears in many, if not all, mechanical systems, e.g. wheels, brakes, valves, cylinders, bearings, transmissions, etc. Particularly interesting seems to be the problem of dry friction, which is often a reason of self-excited vibrations, commonly met in engineering practice. Usually, this is an unnecessary effect and a most unwanted one. Such self-excited vibrations cause an early wear of the contacting parts of machines and, if not under control, could have much more dangerous conse- quences. For many years, the topic of dry friction has been a subject of active research with many attempts to identify the causes of its behaviour such as the squeal of car brakes, extensive wear of cutting tools and others. The problems with dry friction occur also in design and utilizing of rail-vehicles and machines. From the mathematical point of view, dry friction problems are also cumbersome as their inclusion implicates appearance of the discontinuous differen- tial equations, where the character of this disconti- nuity depends upon the friction character adopted. In general, there are many different types of dry fric- tion models and it is crucial to appropriately choose one, which best suits the modelled problem. For example, if one considers dynamics of the system where the relative velocity practically remains con- stant, there is no need for sophisticated dry friction models and even the simplest one described by the Coulomb law will suffice. However, in many cases the variation of the relative velocity is large and often the velocity changes its sign. In such situations, the chosen model must account for the transition from static to dynamic friction and should provide a means of guiding the system through zero relative velocity. These types of friction models should be able to predict both phases of stick with a higher fric- tion coefficient and slip where this coefficient is smaller. These are the reasons why systems with dry friction possess many different types of dynami- cal behaviour, such as periodical, non-periodic, chaotic, and sometimes even static responses [1 – 23]. However, from a viewpoint of the experiment, even the most advanced approaches provide a real- istic approximation of friction force only for regular response of the system. In case of irregular motion the friction characteristics generated from experi- ments often have much more complicated forms than those predicted by most of the existing friction models. This fact cannot be explained through Corresponding author: Centre for Applied Dynamics Research, University of Aberdeen, King’s College, Aberdeen AB24 8UE, UK. email: [email protected] SPECIAL ISSUE PAPER 273 C09305 # IMechE 2006 Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science
Transcript of Regular and chaotic oscillations of friction force

Regular and chaotic oscillations of friction forceA Stefanski1, J Wojewoda1, M Wiercigroch2�, and T Kapitaniak1
1Division of Dynamics, Technical University of Łodz, Łodz, Poland2Centre for Applied Dynamics Research, University of Aberdeen, King’s College, Aberdeen, UK
The manuscript was received on 15 November 2005 and was accepted after revision for publication on 9 December 2005.
DOI: 10.1243/09544062C09305
Abstract: In this paper, several friction features and models are discussed in the context of thedynamical nature of friction force observed during experiments. On the basis of experimentaland theoretical analysis, the authors show that such behaviour can be considered as a certainrepresentation of the system dynamics. According to this approach, a classification of frictionmodels with respect to their sensitivity on the system motion character is introduced. Next,the results of experimental research are reported. Friction characteristics reconstructed exper-imentally for various types of the system response, i.e. periodic, quasi-periodic, and chaotic, aredemonstrated. Finally, these results are compared with numerical simulations using the pro-posed friction model.
Keywords: dry friction, dynamics, chaos, experimental studies
1 INTRODUCTION
The phenomenon of friction appears in many, if notall, mechanical systems, e.g. wheels, brakes, valves,cylinders, bearings, transmissions, etc. Particularlyinteresting seems to be the problem of dry friction,which is often a reason of self-excited vibrations,commonly met in engineering practice. Usually, thisis an unnecessary effect and a most unwanted one.Such self-excited vibrations cause an early wear ofthe contacting parts of machines and, if not undercontrol, could have much more dangerous conse-quences. For many years, the topic of dry frictionhas been a subject of active research with manyattempts to identify the causes of its behaviour suchas the squeal of car brakes, extensive wear of cuttingtools and others. The problems with dry frictionoccur also in design and utilizing of rail-vehiclesand machines.
From the mathematical point of view, dry frictionproblems are also cumbersome as their inclusionimplicates appearance of the discontinuous differen-tial equations, where the character of this disconti-nuity depends upon the friction character adopted.
In general, there are many different types of dry fric-tion models and it is crucial to appropriately chooseone, which best suits the modelled problem. Forexample, if one considers dynamics of the systemwhere the relative velocity practically remains con-stant, there is no need for sophisticated dry frictionmodels and even the simplest one described by theCoulomb law will suffice. However, in many casesthe variation of the relative velocity is large andoften the velocity changes its sign. In such situations,the chosen model must account for the transitionfrom static to dynamic friction and should providea means of guiding the system through zero relativevelocity. These types of friction models should beable to predict both phases of stick with a higher fric-tion coefficient and slip where this coefficient issmaller. These are the reasons why systems withdry friction possess many different types of dynami-cal behaviour, such as periodical, non-periodic,chaotic, and sometimes even static responses[1–23].
However, from a viewpoint of the experiment,even the most advanced approaches provide a real-istic approximation of friction force only for regularresponse of the system. In case of irregular motionthe friction characteristics generated from experi-ments often have much more complicated formsthan those predicted by most of the existing frictionmodels. This fact cannot be explained through
�Corresponding author: Centre for Applied Dynamics Research,
University of Aberdeen, King’s College, Aberdeen AB24 8UE, UK.
email: [email protected]
SPECIAL ISSUE PAPER 273
C09305 # IMechE 2006 Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science
measurement errors. During our earlier research, theauthors have also observed that dynamical beha-viour of friction force can be dependent on thesystem dynamics [14–16, 22, 23]. The main purposeof this paper is to develop a mathematical expla-nation of dynamic responses obtained from exper-imental studies.
The paper is organized as follows. Section 2 con-tains a short review of several examples of existingfriction models (static and dynamic) and ideas con-cerning the nature of friction force. A description ofthe experimental rig and its mathematical model isgiven in section 3 together with the experimentalresults. In section 4, the authors present theirmodel of dry friction and its comparison with experi-mental results. The last section draws someconclusions.
2 FRICTION PHENOMENA AND MODELLING
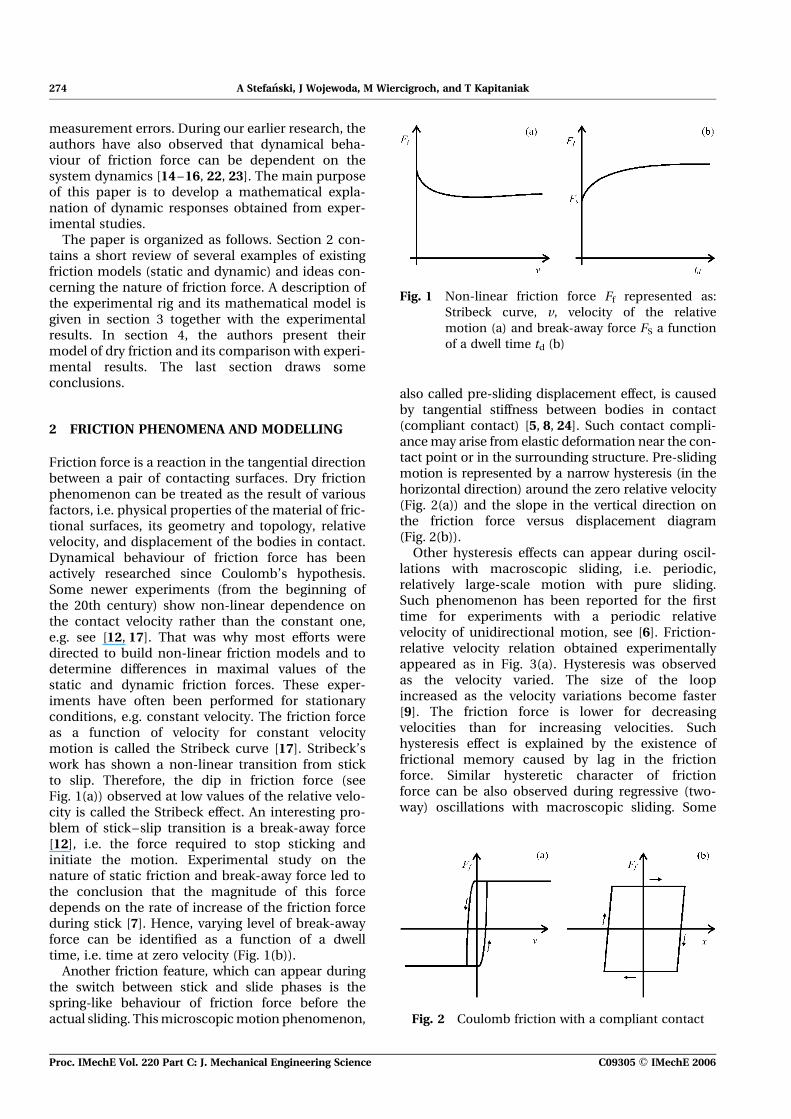
Friction force is a reaction in the tangential directionbetween a pair of contacting surfaces. Dry frictionphenomenon can be treated as the result of variousfactors, i.e. physical properties of the material of fric-tional surfaces, its geometry and topology, relativevelocity, and displacement of the bodies in contact.Dynamical behaviour of friction force has beenactively researched since Coulomb’s hypothesis.Some newer experiments (from the beginning ofthe 20th century) show non-linear dependence onthe contact velocity rather than the constant one,e.g. see [12, 17]. That was why most efforts weredirected to build non-linear friction models and todetermine differences in maximal values of thestatic and dynamic friction forces. These exper-iments have often been performed for stationaryconditions, e.g. constant velocity. The friction forceas a function of velocity for constant velocitymotion is called the Stribeck curve [17]. Stribeck’swork has shown a non-linear transition from stickto slip. Therefore, the dip in friction force (seeFig. 1(a)) observed at low values of the relative velo-city is called the Stribeck effect. An interesting pro-blem of stick–slip transition is a break-away force[12], i.e. the force required to stop sticking andinitiate the motion. Experimental study on thenature of static friction and break-away force led tothe conclusion that the magnitude of this forcedepends on the rate of increase of the friction forceduring stick [7]. Hence, varying level of break-awayforce can be identified as a function of a dwelltime, i.e. time at zero velocity (Fig. 1(b)).
Another friction feature, which can appear duringthe switch between stick and slide phases is thespring-like behaviour of friction force before theactual sliding. This microscopic motion phenomenon,
also called pre-sliding displacement effect, is causedby tangential stiffness between bodies in contact(compliant contact) [5, 8, 24]. Such contact compli-ance may arise from elastic deformation near the con-tact point or in the surrounding structure. Pre-slidingmotion is represented by a narrow hysteresis (in thehorizontal direction) around the zero relative velocity(Fig. 2(a)) and the slope in the vertical direction onthe friction force versus displacement diagram(Fig. 2(b)).
Other hysteresis effects can appear during oscil-lations with macroscopic sliding, i.e. periodic,relatively large-scale motion with pure sliding.Such phenomenon has been reported for the firsttime for experiments with a periodic relativevelocity of unidirectional motion, see [6]. Friction-relative velocity relation obtained experimentallyappeared as in Fig. 3(a). Hysteresis was observedas the velocity varied. The size of the loopincreased as the velocity variations become faster[9]. The friction force is lower for decreasingvelocities than for increasing velocities. Suchhysteresis effect is explained by the existence offrictional memory caused by lag in the frictionforce. Similar hysteretic character of frictionforce can be also observed during regressive (two-way) oscillations with macroscopic sliding. Some
Fig. 1 Non-linear friction force Ff represented as:
Stribeck curve, v, velocity of the relative
motion (a) and break-away force FS a function
of a dwell time td (b)
Fig. 2 Coulomb friction with a compliant contact
274 A Stefanski, J Wojewoda, M Wiercigroch, and T Kapitaniak
Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science C09305 # IMechE 2006
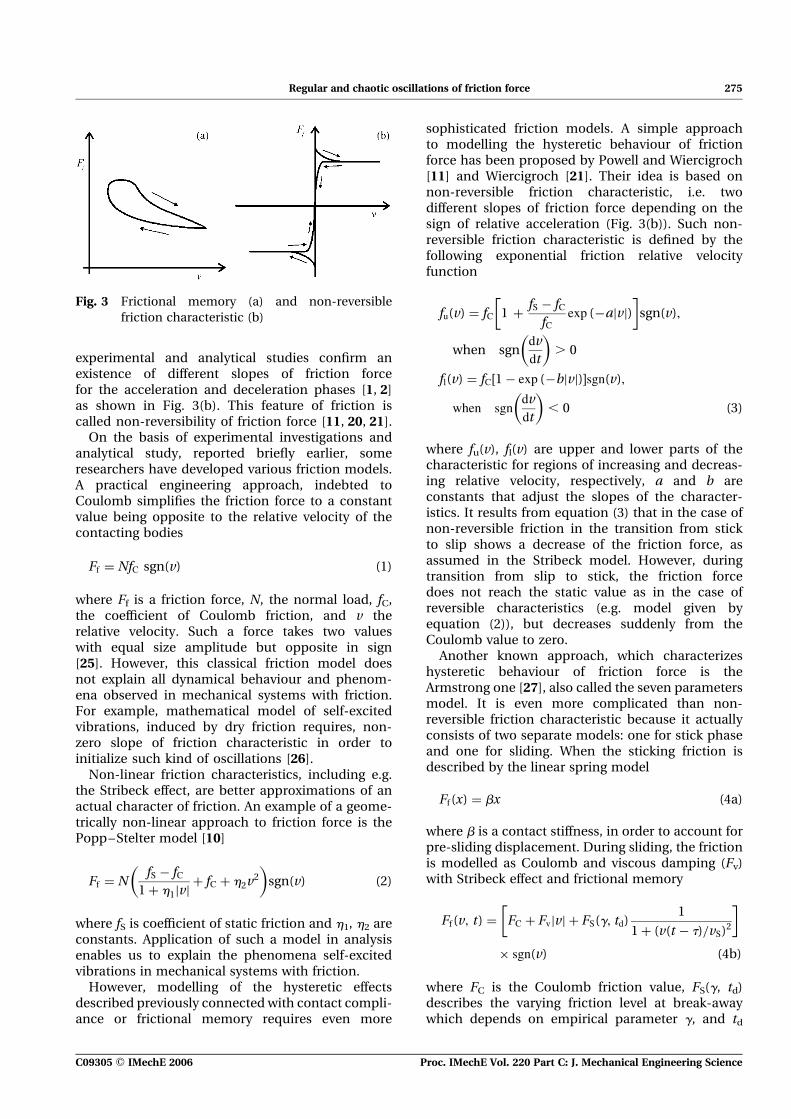
experimental and analytical studies confirm anexistence of different slopes of friction forcefor the acceleration and deceleration phases [1, 2]as shown in Fig. 3(b). This feature of friction iscalled non-reversibility of friction force [11, 20, 21].
On the basis of experimental investigations andanalytical study, reported briefly earlier, someresearchers have developed various friction models.A practical engineering approach, indebted toCoulomb simplifies the friction force to a constantvalue being opposite to the relative velocity of thecontacting bodies
Ff ¼ NfC sgn(v) (1)
where Ff is a friction force, N, the normal load, fC,the coefficient of Coulomb friction, and v therelative velocity. Such a force takes two valueswith equal size amplitude but opposite in sign[25]. However, this classical friction model doesnot explain all dynamical behaviour and phenom-ena observed in mechanical systems with friction.For example, mathematical model of self-excitedvibrations, induced by dry friction requires, non-zero slope of friction characteristic in order toinitialize such kind of oscillations [26].
Non-linear friction characteristics, including e.g.the Stribeck effect, are better approximations of anactual character of friction. An example of a geome-trically non-linear approach to friction force is thePopp–Stelter model [10]
Ff ¼ NfS � fC
1 þ h1jvjþ fC þ h2v
2
� �sgn(v) (2)
where fS is coefficient of static friction and h1, h2 areconstants. Application of such a model in analysisenables us to explain the phenomena self-excitedvibrations in mechanical systems with friction.
However, modelling of the hysteretic effectsdescribed previously connected with contact compli-ance or frictional memory requires even more
sophisticated friction models. A simple approachto modelling the hysteretic behaviour of frictionforce has been proposed by Powell and Wiercigroch[11] and Wiercigroch [21]. Their idea is based onnon-reversible friction characteristic, i.e. twodifferent slopes of friction force depending on thesign of relative acceleration (Fig. 3(b)). Such non-reversible friction characteristic is defined by thefollowing exponential friction relative velocityfunction
fu(v) ¼ fC 1 þfS � fCfC
exp (�ajvj)
� �sgn(v),
when sgndv
dt
� �. 0
fl(v) ¼ fC½1 � exp (�bjvj)�sgn(v),
when sgndv
dt
� �, 0 (3)
where fu(v), fl(v) are upper and lower parts of thecharacteristic for regions of increasing and decreas-ing relative velocity, respectively, a and b areconstants that adjust the slopes of the character-istics. It results from equation (3) that in the case ofnon-reversible friction in the transition from stickto slip shows a decrease of the friction force, asassumed in the Stribeck model. However, duringtransition from slip to stick, the friction forcedoes not reach the static value as in the case ofreversible characteristics (e.g. model given byequation (2)), but decreases suddenly from theCoulomb value to zero.
Another known approach, which characterizeshysteretic behaviour of friction force is theArmstrong one [27], also called the seven parametersmodel. It is even more complicated than non-reversible friction characteristic because it actuallyconsists of two separate models: one for stick phaseand one for sliding. When the sticking friction isdescribed by the linear spring model
Ff(x) ¼ bx (4a)
where b is a contact stiffness, in order to account forpre-sliding displacement. During sliding, the frictionis modelled as Coulomb and viscous damping (Fv)with Stribeck effect and frictional memory
Ff(v, t) ¼ FC þ Fvjvj þ FS(g, td)1
1 þ (v(t � t)=vS)2
� �
� sgn(v) (4b)
where FC is the Coulomb friction value, FS(g, td)describes the varying friction level at break-awaywhich depends on empirical parameter g, and td
Fig. 3 Frictional memory (a) and non-reversible
friction characteristic (b)
Regular and chaotic oscillations of friction force 275
C09305 # IMechE 2006 Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science

the dwell time, t the time delay introducing to modela hysteretic effect of frictional memory and vS isStribeck velocity. As the model is defined by twoseparate equations, some mechanism must governthe switching between them.
All friction characteristics described earlier areclassified as static models in contrast to dynamicfriction models. The difference between them con-sists in the inclusion of frictional memory. Forstatic friction models this frictional memory isomitted (equations (1) and (2)), modelled as non-reversibility (equation (3)), or described with fric-tional lag (equation (4b)). An alternative approachare dynamic friction models where memory beha-viour is described with additional dynamics betweenvelocity and the friction force. The main idea of suchfriction description is to introduce state variables (orinternal states) that determine the level of frictionapart from velocity. Time evolution of state variablesis given by differential equation. The first approachthat can be classified as dynamic friction model hasbeen proposed by Dahl [28]. The base for the Dahlmodel is the stress–strain curve known from classi-cal solid mechanics [29]
dFf
dx¼ s 1 �
Ff
FC
sgn(v)
� �a
(5)
where s is the stiffness coefficient and a determinesthe shape of stress–strain curve. The time depen-dence of the friction force in Dahl model (for a ¼ 1)can be obtained in the following way
dFf
dt¼
dFf
dx
dx
dt¼
dFf
dxv ¼ s v �
Ff
FC
jvj
� �(6)
Introducing Ff ¼ s z, the model can be written as
dz
dt¼ v �
sjvj
FC
z
Ff ¼ sz
(7)
where z is the internal state variable. Equation (7)exemplify a dynamic generalization of classical Cou-lomb friction. However, this approach does notmodel the Stribeck effect and static friction. Theseare the main motivation for further extensions ofthe Dahl model.
Recently, several more developed models, theseinclude other observed friction properties, havebeen proposed [4, 30, 31]. An example of suchapproach is the LuGre model, which is related tothe bristle interpretation of friction [31]. The model
is described as follows
dz
dt¼ v � s0
jvj
g(v)z
Ff ¼ s0z þ s1dz
dtþ cv
(8)
Here, the internal state variable z denotes the averagebristle deflection, coefficients s0 and s1 determinethe bristle stiffness and the bristle damping, respect-ively, cv the viscous friction and the function
g(v) ¼ FC þ (FS � FC) exp �v
vS
� �2 !
(9)
models the Stribeck effect. An advantage of theLuGre model is its rich dynamic behaviour givingpossibilities of numerical modelling of observedfriction phenomena such as stick–slip transition,varying break-away force, frictional memory andhysteretic behaviour, and Stribeck effect.
The brief review of friction models presented inthis section concentrates on their dynamic charac-teristics, which can be used to classify thesemodels. The friction characteristics can be dividedinto two groups, namely:
(a) independent of the system dynamics (e.g.equations (1) to (3));
(b) sensitive on a character of motion of the system(e.g. equations (4a); (4b) and equations (8), (9)).
Sensitivity of more developed models on thesystem dynamics is first and foremost caused by fric-tional memory and also by varying level of break-away force. In the case of steady-state motion,these factors have no influence on the friction forceand it can be approximated precisely with classicalCoulomb or Stribeck models. Even for simpleperiodic motion no significant differences betweenfriction models from both groups can be observed.Periodic motion of the system results in the appear-ance of a hysteresis loop on friction characteristicbecause of the presence of frictional memory (lag)in the models from the second group, but thelevel of break-away force is the same in each cycleof motion because of the constant dwell time.However, similar hysteresis effect is modelled bynon-reversible friction characteristic (equation (3))from the first group. Significant difference betweenboth groups of friction models can appear ifmotion of the system is multi-periodic or quasi-periodic, and in particular, if it is irregular motionof chaotic or stochastic character.
Irregular dynamics of the systems including fric-tional memory generates friction characteristics
276 A Stefanski, J Wojewoda, M Wiercigroch, and T Kapitaniak
Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science C09305 # IMechE 2006

consisted of many (or even infinitely many) hyster-esis loops of different size. Also the break-awayforce possesses different values after each cyclebecause of varying dwell time. Hence, during irregu-lar motion, the friction characteristics reconstructedon the basis of models from the second group takea form of some region in friction force versus relativevelocity diagram. This is the reason, that such frictionmodels are identified as sensitive (on the motioncharacter). As a result of such sensitivity, the authorscan observe a ‘mapping effect’ during the analysis ofdry friction oscillators, i.e. friction characteristic is areflection of the system attractor. In static frictionmodels from the first group, the friction force isdefined as a function of relative velocity accordingto the same formula for steady-state, regular, andirregular motion. Therefore, they are termed insensi-tive (on the motion character). In the next section,experimental verification of sensitive nature of fric-tion force and the ‘mapping effect’ is presented.
During our earlier research [15, 16, 22], theauthors have observed a kind of similarity betweenthe type of the attractor of dynamical system withfriction and dynamical behaviour of friction force.A friction model meeting these observations is alsoproposed [15]. This model was formulated on thebasis of a symmetrical non-reversible frictioncharacteristic and it is described by the followingformula
f (v) ¼ fC 1 þfS� fCfC
exp �a1jvj
jdv=dtjþa2
� �sgn
dv
dtv
� �� �
� sgn(v) (10)
where a1 (1/s) and a2 (m/s2) are constants. A noveltyof our approach is in the introduction of the currentvalue of relative acceleration to the mathematicaldescription of friction phenomenon, which allowsus to model hysteretic frictional memory effect. Letus pay an attention, that the appearance of accelera-tion in friction model can also result from the sevenparameters model (equations (4a), (4b)) because ofthe presence of time delay t. Thus, our model(equation (10)) can be classified as static and sensi-tive on motion character, but unfortunately it doesnot model static friction. In section 4, a developmentof this approach is presented.
3 EXPERIMENTAL STUDIES
3.1 Experimental rig
The experimental oscillator designed by Wiercigrochet al. [20], shown in Fig. 4, comprises a block massthat oscillated along two guiding posts being sup-ported with two coil springs, with a second mass
consisting of a vertical plate (tongue) introducingdry friction to the system. This plate can be in con-tact with two pads connected through a clampingmechanism to the base. A pneumatic actuatorunder constant air pressure supplies constant levelof force acting on the clamping mechanism whichpresses both pads against the tongue. The designallows self-fitting of the friction elements to twoswivel blocks housing the friction plates mountedin their slots using ball links. This helps to compen-sate for any misalignment of clamping even duringoscillations. Different levels of clamping forcesallowed for various normal pressure applied to fric-tion pads and in consequence different amount offriction is induced. A friction mechanism providingthe frictional force comprises a steel plate (tongue)and an adjustable pressure clamping mechanismwith changeable frictional pads. The tongue is avertically positioned steel plate mounted to a forcetransducer (FT) connected to the vibrating mass.The FT signal was taken from the FT but for an accu-rate evaluation of pure friction force, its necessary tosubtract inertia force generated by the tongue itself.For measuring the relative velocity of the oscillatingmass, a linear velocity transducer was used.
Fig. 4 General view of the experimental rig [20]: 1,
shaker; 2, air pressure actuator with gauge; 3,
friction tongue; 4, guiding post; 5, case of the
LVT and LVDT transducers; 6, main mass; 7,
accelerometer; 8, force transducer; 9, coil
springs; 10, clamping mechanism
Regular and chaotic oscillations of friction force 277
C09305 # IMechE 2006 Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science

Different friction pad materials such as Teflon,aluminium, brass, and steel against steel tonguewere used to test the dynamic responses in a widerange of parameters. The Teflon pads worked bestin the device. As the variety of friction materialshave different friction properties the clamping forceneeds to be varied in a wide range. Air pressurecontrol provides for such flexibility, and does notallow for sticking between friction elements duringmotion (excluding extreme cases when air pressurewas at extremely high level).
Slots were machined on to the two clampingfaces of the tongue in order to remove debris gener-ated during experiments. It is worth pointing out thatonly brass pads generated a large amount of debris.The rig was mounted on a shaker that provided thesystem with the necessary excitation. Sensingdevices including accelerometers, velocity, displace-ment, and FTs were used to accurately monitor thestate of the system. A computer data acquisitionsystem and off-line data processing software wereused to support in-depth analysis showing non-reversibility of the friction characteristics.
In the measurements, the following sensors wereused.
1. Linear variable displacement transducer (LVDT)used for tracing the displacement of the mainvibrating mass; it delivered voltage proportionalto the position of the fixing point.
2. Linear velocity transducer (LVT) measuring velo-city of the mass, relative to its end fixationpoints. Voltage appearing on its output was pro-portional to the velocity measured.
3. Two accelerometers measuring accelerations ofthe main mass and the support motion respect-ively, signals from the accelerometers werepassed through a charge amplifier before beingdelivered to the data acquisition system.
4. FT mounted between main mass and the frictiontongue delivered signal proportional to the forceacting in the friction device (this signal also hasbeen passed through a charge amplifier).
5. Pressure gauge mounted on the air supply valve(hose) for control of the clamping force.
The complete rig was mounted to the top of anelectro-dynamic shaker. The base excitation providedby the shaker was controlled by a waveform generatoror by the data acquisition and control system in theaccompanying computer. Such type of rig assemblyallowed for vibration around the resonance frequencyof the system in the range of 5–25 Hz. Both under- andover-resonance regions were measured and used inthe friction identification process.
Discrete time series of the data were obtained fromthe sensors and recorded using a data acquisitionsystem. The system allowed also for controlling the
input form of the signal feeding the shaker amplifier.This way an arbitrary wave could be used as systemexcitation. Such forms were used in the investi-gations because of the fact that other than multi-frequency periodic waves were much more useful inthe identification of system properties than single ones.
3.2 Mathematical model
A simplified scheme of the experimental rig is shownin Fig. 5. The oscillator under consideration can bemodelled as a one-degree-of-freedom mechanicaloscillator to which a dry friction damper has beenadded. The dynamics of this system is described bythe following second-order differential equation
M €y ¼ �2 k½y � e(t)� � c½_y � _e(t)� � Ff (11)
where y, €y, displacement (m), acceleration (m/s2) ofthe mass; M, oscillating mass (with tongue) (kg); k,stiffness of springs (N/m); c, viscous damping coeffi-cient (Ns/m); and e(t), _e(t), displacement (m),velocity (m/s) of the base, respectively.
The friction force Ff can be generally given in theform
Ff ¼ Nf (x, v)sgn(v) (12)
where N is normal pressure force and f(x,v) denotes afunction describing the friction characteristic. Thesubtractions y2 e(t) and _y � _e(t) are relative displa-cement x and relative velocity v between the oscillat-ing mass and the base, respectively. Thus, we canalso determine the friction force Ff directly fromequation (11) as follows
Ff ¼ �(M €y þ 2kx þ cv) (13)
Fig. 5 The model of dry friction oscillator
278 A Stefanski, J Wojewoda, M Wiercigroch, and T Kapitaniak
Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science C09305 # IMechE 2006
3.3 Measurement of the friction force
Among researchers, there exist two schools of experi-mental measurement of friction force [32]:
(a) direct measurements using FT;(b) indirect estimation by measuring motion signals
and applying them to the equation governing thesystem dynamics.
In our experiment, direct measurement has beenperformed by means of an FT which is locatedbetween the main mass and the frictional tongue.However, the signal obtained from the FT does notcompletely reflect the actual friction force. Thissignal has been probably deformed by an influenceof inertia force of unknown magnitude, which hasits source in the mass of frictional tongue and/ormain mass.
Therefore, we have determined the friction forceindirectly on the basis of equation (13). Accordingto equation (13), indirect estimation of frictionforce requires a knowledge of three signals andthree parameters of the frictional system. Thevalues of the relative displacement x and therelative velocity v have been delivered directlyfrom LVDT and LVT transducers, respectively. Theaccelerometer connected to the main vibratingmass delivered the acceleration signal €y. The mainmass (with frictional tongue) of the oscillatoramounts to M ¼ 3.35 kg, total stiffness of springs is2k ¼ 5040 N/m and the viscous damping coefficientapplied in calculations was estimated asc ¼ 16.85 Ns/m. This coefficient has been identifiedaccording to a method described in reference [33],which allows to separate Coulomb and viscousfriction from free vibration decrements.
During the experiment, friction pads made fromTeflon and constant air pressure of p ¼ 1 bar in theclamping mechanism have been applied. Variousforms of base excitation have been provided to theoscillator: harmonic, multi-periodic, and non-periodic.
3.4 Results
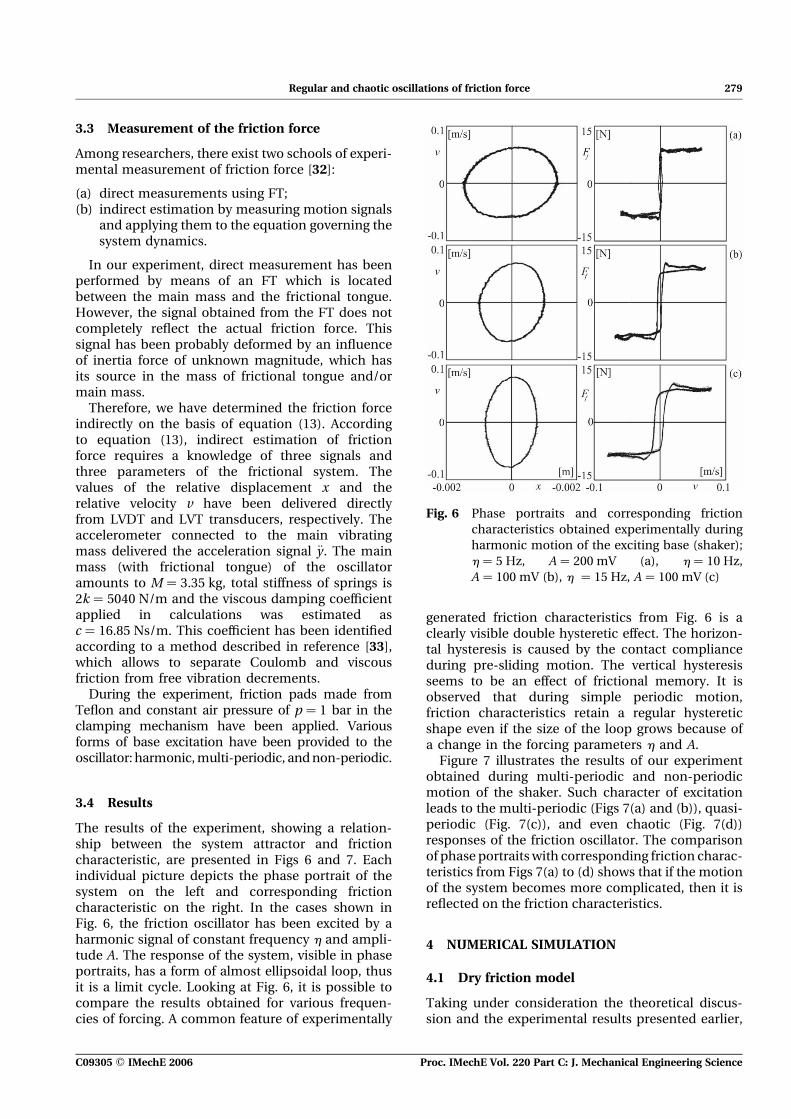
The results of the experiment, showing a relation-ship between the system attractor and frictioncharacteristic, are presented in Figs 6 and 7. Eachindividual picture depicts the phase portrait of thesystem on the left and corresponding frictioncharacteristic on the right. In the cases shown inFig. 6, the friction oscillator has been excited by aharmonic signal of constant frequency h and ampli-tude A. The response of the system, visible in phaseportraits, has a form of almost ellipsoidal loop, thusit is a limit cycle. Looking at Fig. 6, it is possible tocompare the results obtained for various frequen-cies of forcing. A common feature of experimentally
generated friction characteristics from Fig. 6 is aclearly visible double hysteretic effect. The horizon-tal hysteresis is caused by the contact complianceduring pre-sliding motion. The vertical hysteresisseems to be an effect of frictional memory. It isobserved that during simple periodic motion,friction characteristics retain a regular hystereticshape even if the size of the loop grows because ofa change in the forcing parameters h and A.
Figure 7 illustrates the results of our experimentobtained during multi-periodic and non-periodicmotion of the shaker. Such character of excitationleads to the multi-periodic (Figs 7(a) and (b)), quasi-periodic (Fig. 7(c)), and even chaotic (Fig. 7(d))responses of the friction oscillator. The comparisonof phase portraits with corresponding friction charac-teristics from Figs 7(a) to (d) shows that if the motionof the system becomes more complicated, then it isreflected on the friction characteristics.
4 NUMERICAL SIMULATION
4.1 Dry friction model
Taking under consideration the theoretical discus-sion and the experimental results presented earlier,
Fig. 6 Phase portraits and corresponding friction
characteristics obtained experimentally during
harmonic motion of the exciting base (shaker);
h ¼ 5 Hz, A ¼ 200 mV (a), h ¼ 10 Hz,
A ¼ 100 mV (b), h ¼ 15 Hz, A ¼ 100 mV (c)
Regular and chaotic oscillations of friction force 279
C09305 # IMechE 2006 Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science
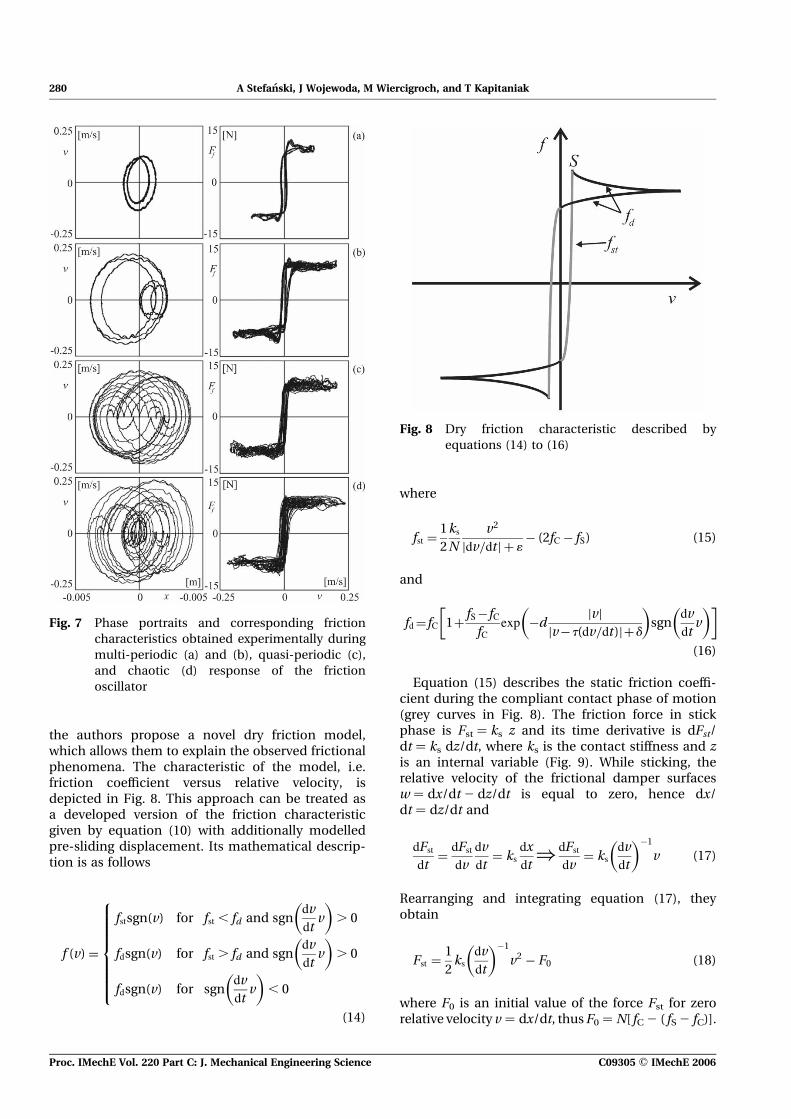
the authors propose a novel dry friction model,which allows them to explain the observed frictionalphenomena. The characteristic of the model, i.e.friction coefficient versus relative velocity, isdepicted in Fig. 8. This approach can be treated asa developed version of the friction characteristicgiven by equation (10) with additionally modelledpre-sliding displacement. Its mathematical descrip-tion is as follows
f (v) ¼
fstsgn(v) for fst , fd and sgndv
dtv
� �. 0
fdsgn(v) for fst . fd and sgndv
dtv
� �. 0
fdsgn(v) for sgndv
dtv
� �, 0
8>>>>>>><>>>>>>>:
(14)
where
fst ¼1
2
ksN
v2
jdv=dtj þ 1� (2fC � fS) (15)
and
fd¼ fC 1þfS� fCfC
exp �djvj
jv�t(dv=dt)jþd
� �sgn
dv
dtv
� �� �(16)
Equation (15) describes the static friction coeffi-cient during the compliant contact phase of motion(grey curves in Fig. 8). The friction force in stickphase is Fst ¼ ks z and its time derivative is dFst/dt ¼ ks dz/dt, where ks is the contact stiffness and zis an internal variable (Fig. 9). While sticking, therelative velocity of the frictional damper surfacesw ¼ dx/dt2 dz/dt is equal to zero, hence dx/dt ¼ dz/dt and
dFst
dt¼
dFst
dv
dv
dt¼ ks
dx
dt)
dFst
dv¼ ks
dv
dt
� ��1
v (17)
Rearranging and integrating equation (17), theyobtain
Fst ¼1
2ks
dv
dt
� ��1
v2 � F0 (18)
where F0 is an initial value of the force Fst for zerorelative velocity v ¼ dx/dt, thusF0 ¼ N[ fC 2 ( fS 2 fC)].
Fig. 7 Phase portraits and corresponding friction
characteristics obtained experimentally during
multi-periodic (a) and (b), quasi-periodic (c),
and chaotic (d) response of the friction
oscillator
Fig. 8 Dry friction characteristic described by
equations (14) to (16)
280 A Stefanski, J Wojewoda, M Wiercigroch, and T Kapitaniak
Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science C09305 # IMechE 2006
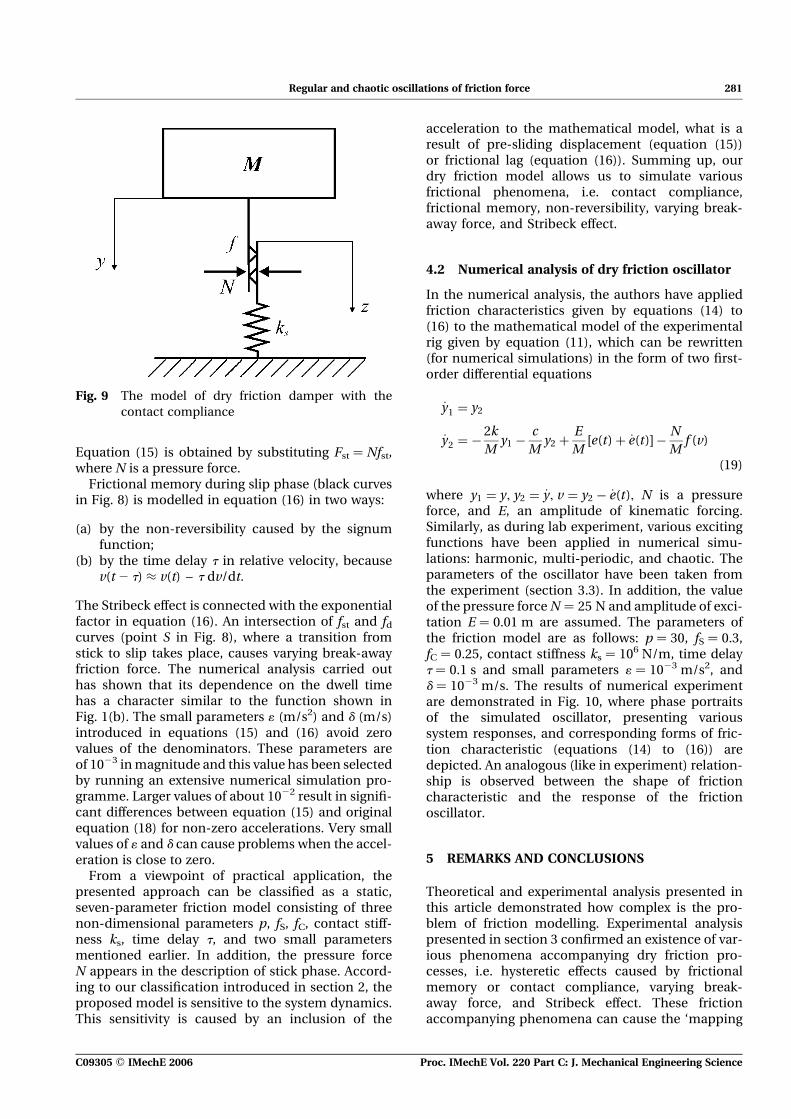
Equation (15) is obtained by substituting Fst ¼ Nfst,where N is a pressure force.
Frictional memory during slip phase (black curvesin Fig. 8) is modelled in equation (16) in two ways:
(a) by the non-reversibility caused by the signumfunction;
(b) by the time delay t in relative velocity, becausev(t2 t) � v(t) – t dv/dt.
The Stribeck effect is connected with the exponentialfactor in equation (16). An intersection of fst and fdcurves (point S in Fig. 8), where a transition fromstick to slip takes place, causes varying break-awayfriction force. The numerical analysis carried outhas shown that its dependence on the dwell timehas a character similar to the function shown inFig. 1(b). The small parameters 1 (m/s2) and d (m/s)introduced in equations (15) and (16) avoid zerovalues of the denominators. These parameters areof 1023 in magnitude and this value has been selectedby running an extensive numerical simulation pro-gramme. Larger values of about 1022 result in signifi-cant differences between equation (15) and originalequation (18) for non-zero accelerations. Very smallvalues of 1 and d can cause problems when the accel-eration is close to zero.
From a viewpoint of practical application, thepresented approach can be classified as a static,seven-parameter friction model consisting of threenon-dimensional parameters p, fS, fC, contact stiff-ness ks, time delay t, and two small parametersmentioned earlier. In addition, the pressure forceN appears in the description of stick phase. Accord-ing to our classification introduced in section 2, theproposed model is sensitive to the system dynamics.This sensitivity is caused by an inclusion of the
acceleration to the mathematical model, what is aresult of pre-sliding displacement (equation (15))or frictional lag (equation (16)). Summing up, ourdry friction model allows us to simulate variousfrictional phenomena, i.e. contact compliance,frictional memory, non-reversibility, varying break-away force, and Stribeck effect.
4.2 Numerical analysis of dry friction oscillator
In the numerical analysis, the authors have appliedfriction characteristics given by equations (14) to(16) to the mathematical model of the experimentalrig given by equation (11), which can be rewritten(for numerical simulations) in the form of two first-order differential equations
_y1 ¼ y2
_y2 ¼ �2k
My1 �
c
My2 þ
E
M½e(t) þ _e(t)� �
N
Mf (v)
(19)
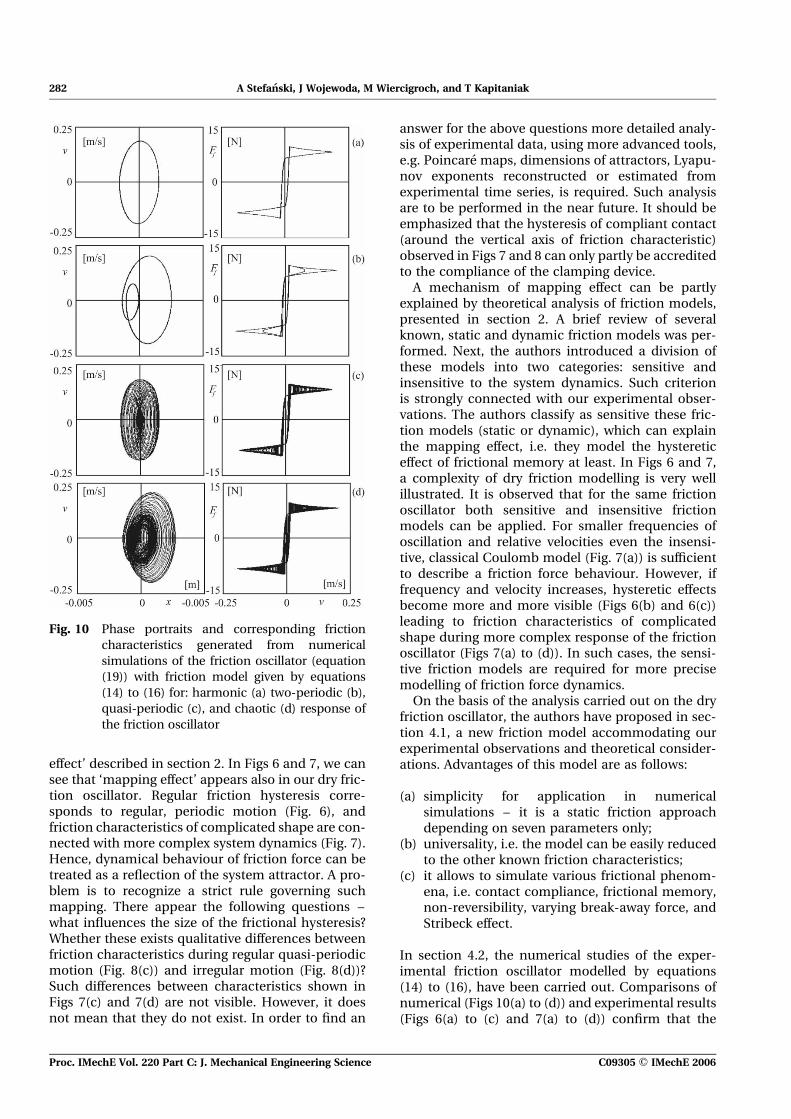
where y1 ¼ y, y2 ¼ _y, v ¼ y2 � _e(t), N is a pressureforce, and E, an amplitude of kinematic forcing.Similarly, as during lab experiment, various excitingfunctions have been applied in numerical simu-lations: harmonic, multi-periodic, and chaotic. Theparameters of the oscillator have been taken fromthe experiment (section 3.3). In addition, the valueof the pressure force N ¼ 25 N and amplitude of exci-tation E ¼ 0.01 m are assumed. The parameters ofthe friction model are as follows: p ¼ 30, fS ¼ 0.3,fC ¼ 0.25, contact stiffness ks ¼ 106 N/m, time delayt ¼ 0.1 s and small parameters 1 ¼ 1023 m/s2, andd ¼ 1023 m/s. The results of numerical experimentare demonstrated in Fig. 10, where phase portraitsof the simulated oscillator, presenting varioussystem responses, and corresponding forms of fric-tion characteristic (equations (14) to (16)) aredepicted. An analogous (like in experiment) relation-ship is observed between the shape of frictioncharacteristic and the response of the frictionoscillator.
5 REMARKS AND CONCLUSIONS
Theoretical and experimental analysis presented inthis article demonstrated how complex is the pro-blem of friction modelling. Experimental analysispresented in section 3 confirmed an existence of var-ious phenomena accompanying dry friction pro-cesses, i.e. hysteretic effects caused by frictionalmemory or contact compliance, varying break-away force, and Stribeck effect. These frictionaccompanying phenomena can cause the ‘mapping
Fig. 9 The model of dry friction damper with the
contact compliance
Regular and chaotic oscillations of friction force 281
C09305 # IMechE 2006 Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science
effect’ described in section 2. In Figs 6 and 7, we cansee that ‘mapping effect’ appears also in our dry fric-tion oscillator. Regular friction hysteresis corre-sponds to regular, periodic motion (Fig. 6), andfriction characteristics of complicated shape are con-nected with more complex system dynamics (Fig. 7).Hence, dynamical behaviour of friction force can betreated as a reflection of the system attractor. A pro-blem is to recognize a strict rule governing suchmapping. There appear the following questions –what influences the size of the frictional hysteresis?Whether these exists qualitative differences betweenfriction characteristics during regular quasi-periodicmotion (Fig. 8(c)) and irregular motion (Fig. 8(d))?Such differences between characteristics shown inFigs 7(c) and 7(d) are not visible. However, it doesnot mean that they do not exist. In order to find an
answer for the above questions more detailed analy-sis of experimental data, using more advanced tools,e.g. Poincare maps, dimensions of attractors, Lyapu-nov exponents reconstructed or estimated fromexperimental time series, is required. Such analysisare to be performed in the near future. It should beemphasized that the hysteresis of compliant contact(around the vertical axis of friction characteristic)observed in Figs 7 and 8 can only partly be accreditedto the compliance of the clamping device.
A mechanism of mapping effect can be partlyexplained by theoretical analysis of friction models,presented in section 2. A brief review of severalknown, static and dynamic friction models was per-formed. Next, the authors introduced a division ofthese models into two categories: sensitive andinsensitive to the system dynamics. Such criterionis strongly connected with our experimental obser-vations. The authors classify as sensitive these fric-tion models (static or dynamic), which can explainthe mapping effect, i.e. they model the hystereticeffect of frictional memory at least. In Figs 6 and 7,a complexity of dry friction modelling is very wellillustrated. It is observed that for the same frictionoscillator both sensitive and insensitive frictionmodels can be applied. For smaller frequencies ofoscillation and relative velocities even the insensi-tive, classical Coulomb model (Fig. 7(a)) is sufficientto describe a friction force behaviour. However, iffrequency and velocity increases, hysteretic effectsbecome more and more visible (Figs 6(b) and 6(c))leading to friction characteristics of complicatedshape during more complex response of the frictionoscillator (Figs 7(a) to (d)). In such cases, the sensi-tive friction models are required for more precisemodelling of friction force dynamics.
On the basis of the analysis carried out on the dryfriction oscillator, the authors have proposed in sec-tion 4.1, a new friction model accommodating ourexperimental observations and theoretical consider-ations. Advantages of this model are as follows:
(a) simplicity for application in numericalsimulations – it is a static friction approachdepending on seven parameters only;
(b) universality, i.e. the model can be easily reducedto the other known friction characteristics;
(c) it allows to simulate various frictional phenom-ena, i.e. contact compliance, frictional memory,non-reversibility, varying break-away force, andStribeck effect.
In section 4.2, the numerical studies of the exper-imental friction oscillator modelled by equations(14) to (16), have been carried out. Comparisons ofnumerical (Figs 10(a) to (d)) and experimental results(Figs 6(a) to (c) and 7(a) to (d)) confirm that the
Fig. 10 Phase portraits and corresponding friction
characteristics generated from numerical
simulations of the friction oscillator (equation
(19)) with friction model given by equations
(14) to (16) for: harmonic (a) two-periodic (b),
quasi-periodic (c), and chaotic (d) response of
the friction oscillator
282 A Stefanski, J Wojewoda, M Wiercigroch, and T Kapitaniak
Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science C09305 # IMechE 2006
proposed dry friction model is a good approximationof the observed frictional phenomena.
ACKNOWLEDGEMENTS
This study has been supported by the PolishDepartment for Scientific Research (DBN) underproject no. PB 0804/T07/2003/25 and the Universityof Aberdeen. The authors would like to thank theanonymous reviewers for the constructivecomments.
REFERENCES
1 Bell, R. and Burdekin, M. A study of stick-slip motionof machine tool feed drives. Proc. Instn Mech. Engrs,1970, 184, 543–557.
2 Den Hartog, J. P. Forced vibrations with combinedCoulomb and viscous friction. Trans. ASME, 1931, 53,107–115.
3 Fenny, B. F. and Moon, F. C. Chaos in a forced dryfriction oscillator: experiment and numerical model-ling. J. Sound Vib., 1994, 170(3), 303–323.
4 Haessig, D. A. and Friedland, B. On the modelling andsimulation of friction. J. Dyn. Systems Meas. ControlTrans ASME, 1991, 113(3), 354–362.
5 Harnoy, A. and Friedland, B. Modeling and simulationof elastic and friction forces in lubricated bearings forprecise motion control. Wear, 1994, 172, 155–165.
6 Hess, D. P. and Soom, A. Friction at a lubricated linecontact operating at oscillating sliding velocities.J. Tribol., 1990, 112, 147–152.
7 Johannes, V. I., Green, M. A., and Brockley, C. A. Therole of the rate of application of the tangential forcein determining the static friction coefficient. Wear,1973, 24, 381–385.
8 Liang, J.-W. and Feeny, B. F. Dynamical friction beha-vior in a forced oscillator with a compliant contact.J. Appl. Mech., 1998, 65, 250–257.
9 Olsson, H., Astrom, K. J., Canudas de Wit, C., Gafvert, M.,and Lischinsky, P. Friction models and friction compen-sation. Eur. J. Contr., 1998, 4(3), 176–195.
10 Popp, K. and Stelter, P. Non-linear oscillations ofstructures induced by dry friction. In Non-lineardynamics in engineering systems (Ed. W. Schiehlen),1990 (Springer, New York).
11 Powell, J. and Wiercigroch, M. Influence of non-reversible Coulomb characteristics on the response ofa harmonically excited linear oscillator. Mach. Vib.,1992, 1(2), 94–104.
12 Rabinowicz, E. The nature of the static and kineticcoefficients of friction. J. Appl. Phys., 1951, 22(11),1373–1379.
13 Shaw, S. W. On the dynamic response of a system withdry friction. J. Sound Vib., 1986, 108, 305–325.
14 Stefanski, A., Wojewoda, J., and Wiercigroch, M.Numerical analysis of duffing oscillator with dryfriction. Mech. Mech. Eng., 2000, 4(2), 127–137.
15 Stefanski, A., Wojewoda, J., Wiercigroch, M., andKapitaniak, T. Chaos caused by non-reversible dryfriction. Chaos, Solitons Fractals, 2003, 16, 661–664.
16 Stefanski, A., Wojewoda, J., and Furmanik, K. Experi-mental and numerical analysis of self – excitedfriction oscillator. Chaos, Solitons Fractals, 2001, 12,1691–1704.
17 Stribeck, R. Die wesentlichen Eigenschaften der Gleit-und Rollenlager – the key qualities of sliding and rollerbearings. Zeitschrift des Vereines Deutscher Ingenieure,1902, 46(38,39), 1342–1348, 1432–1437.
18 Tolstoi, D. M. Significance of the normal degree of free-dom and natural normal vibrations in contact friction.Wear, 1967, 10, 199–213.
19 Wiercigroch, M. A. Note on the switch function forthe stick-slip phenomenon. J. Sound Vib., 1994, 175,700–705.
20 Wiercigroch, M., Sin, V. W. T., and Liew, Z. F. K. Non-reversible dry friction oscillator: design and measure-ments. Proc. Instn Mech. Engrs, 1999, 213(C), 527–534.
21 Wiercigroch, M. Comments on the study of a harmoni-cally excited linear oscillator with a Coulomb damper.J. Sound Vib., 1993, 167(3), 560–563.
22 Wojewoda, J., Kapitaniak, T., Barron, R., and Brindley, J.Complex behaviour of a quasiperiodically forced systemwith dry friction. Chaos, Solitons Fractals, 1993, 3(1),35–46.
23 Wojewoda, J. Chaotic behavior of friction force. Int.J. Bifurcation Chaos, 1992, 2(1), 205–209.
24 Courtney-Pratt, J. S. and Eisner, E. The effect of a tan-gential force on the contact of metallic bodies. Proc.Royal Soc., 1956, A238, 529–550.
25 Coulomb, C. A. Theorie des machines simples, Mem-oires de Mathematique et de Physique de l’Academiedes Sciences, 1785, 10, 161–331.
26 Babakov, I. M. Theory of vibrations (in Russian), 1968(Nauka, Moscow).
27 Armstrong-Helouvry, B., Dupont, P., and Canudasde Wit, C. A survey of models, analysis tools andcompensation methods for the control of machineswith friction. Automatica, 1994, 30(7), 1083–1138.
28 Dahl, P. A solid friction model. Technical report TOR-0158(3107–18)-1, The Aerospace Corporation, ElSegundo, CA, 1968.
29 Ramberg, W. and Osgood, W. R. Description of stress-strain curves by three parameters. Technical note 902,National Advisory Committee for Aeronautics,Washington, 1943.
30 Bliman, P.-A. and Sorine, M. Easy-to-use realistic dryfriction models for automatic control. In Proceedingsof 3rd European Control Conference, Rome, Italy,1995, pp. 3788–3794.
31 Canudas de Wit, C., Olsson, H., Astrom, K. J., andLischinsky, P. A new model for control of systemswith friction. IEEE Trans. Automat. Contr., 1995,40(3), 419–425.
32 Liang, J.-W. and Feeny, B. F. A comparison betweendirect and indirect friction measurements in a forcedoscillator. J. Appl. Mech., 1998, 65, 783–786.
33 Liang, J.-W. and Feeny, B. F. Identifying Coulomband viscous friction from free-vibration decrements.Nonlinear Dynam., 1998, 16, 337–347.
Regular and chaotic oscillations of friction force 283
C09305 # IMechE 2006 Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science

APPENDIX
Notation
a1, a2 constants controlling a modifiednon-reversible friction model,equation (10)
a, b constants controlling the originalnon-reversible friction model,equation (3)
A amplitude of excitation (mV)c viscous damping coefficientd constant controlling a modified
non-reversible friction model,equation (16)
e(t) displacement of the base_e(t) velocity of the baseE amplitude of excitation (m)f(x, v) function describing the frictionfC coefficient of Coulomb frictionfS coefficient of static frictionfst, fd branches of friction characteristicsfu(v), fl(v) upper and lower parts of the
characteristicFC Coulomb friction valueFf friction forceFS(g, td) describes the varying friction level at
break-awayFst friction force in the stick phase
F0 initial value of the force Fst for zerorelative velocity
k stiffness of springsks contact stiffnessM oscillating mass (with tongue)N normal pressure forcep air pressuretd dwell timev relative velocityvS Stribeck velocityw relative velocity of the frictional
damper surfacesx relative displacementy coordinate of the mass motionz average bristle deflection
a determines the shape of stress-straincurve
b contact stiffnessg empirical parameterd small parameter (m/s)1 small parameter (m/s2)h frequencyh1, h2 constants controlling the dry and
viscous friction in equation (2)s the stiffness coefficients0, s1 determine the bristles stiffness and
the bristles damping, respectivelyt time delay
284 A Stefanski, J Wojewoda, M Wiercigroch, and T Kapitaniak
Proc. IMechE Vol. 220 Part C: J. Mechanical Engineering Science C09305 # IMechE 2006




















