
Proiect STF Boloaga Alexandru
29
Studiul privind teoria formarii imaginilor panoramice si a celor de perspectica
Transcript of Proiect STF Boloaga Alexandru
Studiul privindteoria formarii
imaginilor panoramicesi a celor deperspectica
Boloaga AlexandruGrupa: 444E
Cuprins:
1.

1 . IntroducereSistemele de imagerie stereo panoramice vizează obținerea de informații vizuale de la un domeniu larg devizualizare ( FOV ) și în același timp , cu vederi stereo care permit perceptia adancime 3D . aceste caracteristicio re importantă pentru o varietate de aplicatii din lumea reala , cum ar fi supravegherea și autonommisiuni de navigare . Au fost propuse o serie de sisteme panoramice viziune stereoliteratura de specialitate . O categorie de astfel de sisteme utilizează două sau mai multe camere omni - direcțional , caresunt configurate pentru a produce fie perechi stereo orizontale [ 1 ] sau perechi stereo verticale [ 2 ] . Astudiu și compararea acestor sisteme pot fi găsite în [ 3 ] și [ 4 ] .Spre deosebire de acestea ,o altă categorie de sisteme foloseste doar un singur aparat de fotografiat combinat cu optica pentru a realizaviziune stereo . Diferite componente optice au fost raportate în aceste sisteme , cum ar fi o

hiperbolic oglindă dublu lobi [ 5 ] , mai multe oglinzi conice combinate [ 6 , 7 ] , patru paraboliceOglinzi ( cu un aparat de fotografiat ortografică ) [ 8 ] , un obiectiv concav , cu o oglindă convexă [ 9 ] , sau ooglinda piramidă [ 10 ] . Punerea în aplicare cu un singur aparat de fotografiat aduce diverse avantaje, cum arachiziție la fel de simplu de date , fără sincronizare multi- camera ,dimensiuni sistem compact , șia redus costul sistemului . Aceste caracteristici sunt deosebit de atractive în aplicații de robotică . Alimitare a folosi un singur aparat de fotografiat este cărezoluția imaginii este redusă . Acest lucru poate fiameliorate prin folosirea unui senzor de imagine de înaltă rezoluție . În această lucrare , ne-am raporta un design pentru un singur aparat de fotografiat pe bază de imagistica panoramică stereosistem . Comparativ cu sistemele existente ,sistemul propus îmbunătățește simultancapacitatea de achiziție a imaginii în două aspecte . În primul rând ,viziune stereo este activat peste o 360 de gradeFOV orizontală . FOV vertical pentru viziunea stereo este centrată în apropiere de planul orizontal ,în jurul căreia informații 3D este esențială pentru vehiculele de suprafață sau roboți care au nevoie , pentru a evitaobstacolele de pe teren și de a efectua planificarea cale . În al doilea rând , pe lângă FOV stereo ,Sistemul " e întreg FOV vertical este mărită . Aceasta elimină regiunea orbire vizual pentru oo mai bună monitorizare a mediului înconjurător în aplicații practice . Un sistem similara fost raportat în [ 11 ] cu scopul de a mări pe verticală FOV , cu toate acestea , fără a exploracapacitatea de viziune stereo . Designul propus constă într-un aparat de fotografiat ochi de pește și o oglindă reflectorizant convex caprezentat în Fig . 1 .Axa optică a lentilei ochi de pește șiaxa opticăa oglinzii suntaliniate . O imagine capturată de către sistemul conține o regiune
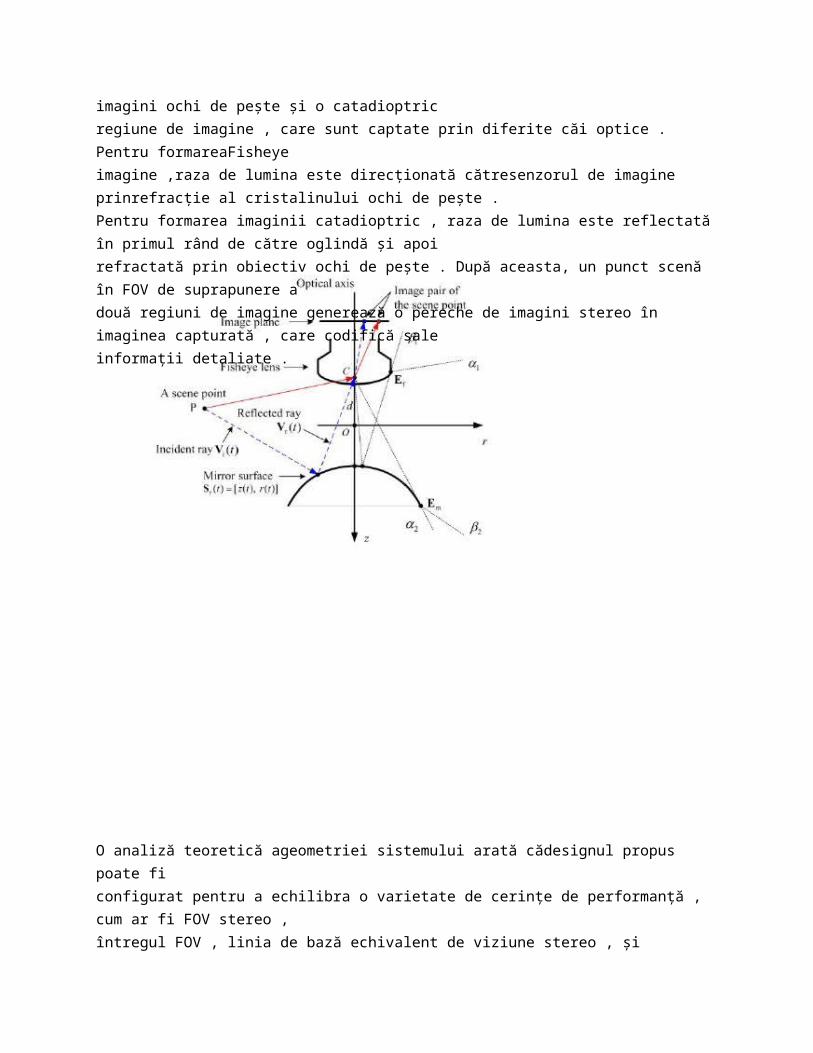
imagini ochi de pește și o catadioptricregiune de imagine , care sunt captate prin diferite căi optice . Pentru formareaFisheyeimagine ,raza de lumina este direcționată cătresenzorul de imagine prinrefracție al cristalinului ochi de pește .Pentru formarea imaginii catadioptric , raza de lumina este reflectatăîn primul rând de către oglindă și apoirefractată prin obiectiv ochi de pește . După aceasta, un punct scenă în FOV de suprapunere adouă regiuni de imagine generează o pereche de imagini stereo în imaginea capturată , care codifică saleinformații detaliate .
O analiză teoretică ageometriei sistemului arată cădesignul propus poate ficonfigurat pentru a echilibra o varietate de cerințe de performanță , cum ar fi FOV stereo ,întregul FOV , linia de bază echivalent de viziune stereo , și
rezoluția imaginii . acest lucru oferăproiectare flexibilitate pentru a satisface cerințele de aplicare carepoate pune accentul performanță diferiteaspecte . Sunt prezentate compromisurile dintre modele . Analiza design include , de asemenea,configurații în care un singur punct de vedere ( SVP ) Constrângerea [12 ] este relaxat . Pentru a lucra cusisteme cu o problemă non- SVP , vom folosi un model generic denaturare radial [ 13 ] pentru a descrieprocesul de imagistică . Parametrii modelului poate fi estimată folosind o baza de homographyMetoda [ 13 ] , care pur și simplu nevoie de câteva imagini dintr-un panou planar LCD în necunoscutpoziții . O configurare experimental a fost construit pentru a demonstra fezabilitatea sistemului propusfolosind componente disponibile comercial . Configurarea surprinde o panorama cu un FOV de360 ° (orizontal ) de 125 ° (vertical) . Verticală FOV este mărită de la fel de mult ca un factor de2.3 în comparație cu sistemul raportate [ 11 ] ( 55 ° FOV verticală ) . Viziune stereo este activat apropiereaplan orizontal , cu un unghi de 21 ° vertical . Sistemul poate furnizao soluție pentru obținerea 3Dinformații pentru misiuni robotice , cum ar fi evitarea obstacolelor și calea de planificare în timp cemonitorizarea mediului înconjurător cu mai puține regiuni orbire vizuale . experimentele deReconstrucție 3D au fost realizate pentru un mediu de interior . Ulterioare, posturi de probăpuncte afișate pe un panou LCD cu poziții cunoscute în 3D au fost estimate pentru oEvaluarea cantitativă arezultatului reconstrucție 3D .
3 . Design SystemDesignul propus poate fi configurat pentru a sublinia diferite aspecte de aplicareCerințe de variație de un set de parametri de proiectare . În
special , de mai multe interesatcerințele de performanță sunt întregul FOV , FOV stereo , rezoluția imaginii , precum șiLungimea de bază ( echivalent ) pentru viziune stereo . Dimensiunea de sistem poate , de asemenea, trebuie să fieluate în considerare la un sistem compact este dorit . Întreaga FOV și FOV stereo sunt așa cum sunt definite la punctul 2 . Rezoluția imaginii esteevaluat ca pixelii de imagine pe unitatea de unghi vertical , care pot fi exprimate ca N / ,unde N este numărul de pixeli de-a lungul unui interval de imagine radial și este verticală FOVrespectate de aceste pixeli . Având în vedere că rezoluția imaginii ochi de pește va fi stabilită o datălens ochi de pește este ales , principala preocupare va fi rezoluția catadioptric imagine . pentruusurinta de analiză , vom presupune că imaginea ochi de pește areo rezoluție a imaginii constant îndirecție radială și este asociat cu un indice de rezoluție a imaginii ( IRI ) din 1 . Utilizând aceastămedie IRI , analiza rezoluția imaginii este normalizat la imaginea ochi de pește . Așa cumeste FOVextinse după reflecție în oglindă , imaginea catadioptric are o rezoluție mai mică a imaginii . noiia în considerare media IRI a imaginii catadioptric și este determinată de ( 90o 2 ) / ( 1 2 ) . Rețineți că, deoarece rezoluția imaginii nu este uniformă de-a lungul imaginiirază ,medie IRI nu poate fi liniar dacă se face comparația între sisteme . În practică ,diferența dintre rezoluțiaimaginii ochi de pește șiimaginea catadioptric reduceprecizia de potrivire stereo . O soluție parțială este de a se potrivi cu rezoluția prin aplicarea gaussiannetezirea cu dimensiuni diferite de kernel la cele două regiuni de imagine . Ca și în multe sisteme catadioptrice [ 12 ] , există , de asemenea, gama de problema de setare concentrându-se însistemul propus . Sistemul propus constă într-un sistem de ochi
de pește și un catadioptricsistem care necesită setări diferite gama de focalizare . O soluție parțială este de a măriprofunzime de câmp a lentilei ochi de pește cu ajutorul unui mic dimensiuni deschidere la costul de reducere aachiziție de imagine frame rate . În această lucrare , dimensiunea deschidere a obiectivului ochi de pește se presupune căsă fie suficient de mică IRI este pur și simplu definit pe baza unghiular FOV . Pentru vederii stereo , linia de bază este importantă pentru corectitudinea construcție 3D . Cândimagine catadioptric este SVP , linia de bază asistemului propus este distanța dintrecentrul optic al lentilei ochi de pește și punctul virtual reflectat în spatele oglinzii . Spre deosebire deaceasta , atunci când imaginea este catadioptric non - SVP , prelungită razele de lumină incidente intersecteazăaxa optică într-un interval în loc de un singur punct de vedere virtuală . In acest caz , un echivalentde bază este definită în funcție de media acestor puncte de intersecție . Așa cum se arată în secțiunea 2 , parametrii de proiectare înformarea imaginii includ distantade lentile fisheye d , selectarea obiectiv ochi de pește , precumși parametrii de oglinda . atunci când este selectat un obiectiv ochi de pește off- the-shelf , parametrii obiectiv ochi de pește sunt determinate .În ceea ce priveșteoglindă , formele oglinda poate fi sferică sauconică . Oglinda sfericăParametrii suntraza R șiw jumătate de diametru . Parametrii oglindă conice suntexcentricitate e , punctul central al oglinzii p și jumătate diametrul w oglindă . Pentru un FOV larg , oglinzi conice sunt utile . În această lucrare , ne considerăm mai întâi cazul în care unoglindă hiperbolă este folosit cu o constrângere SVP . Aici toaterazele de lumină captate sunt îndreptate sprehiperbola " s se concentreze punct în interiorul oglinda [ 12 ] .
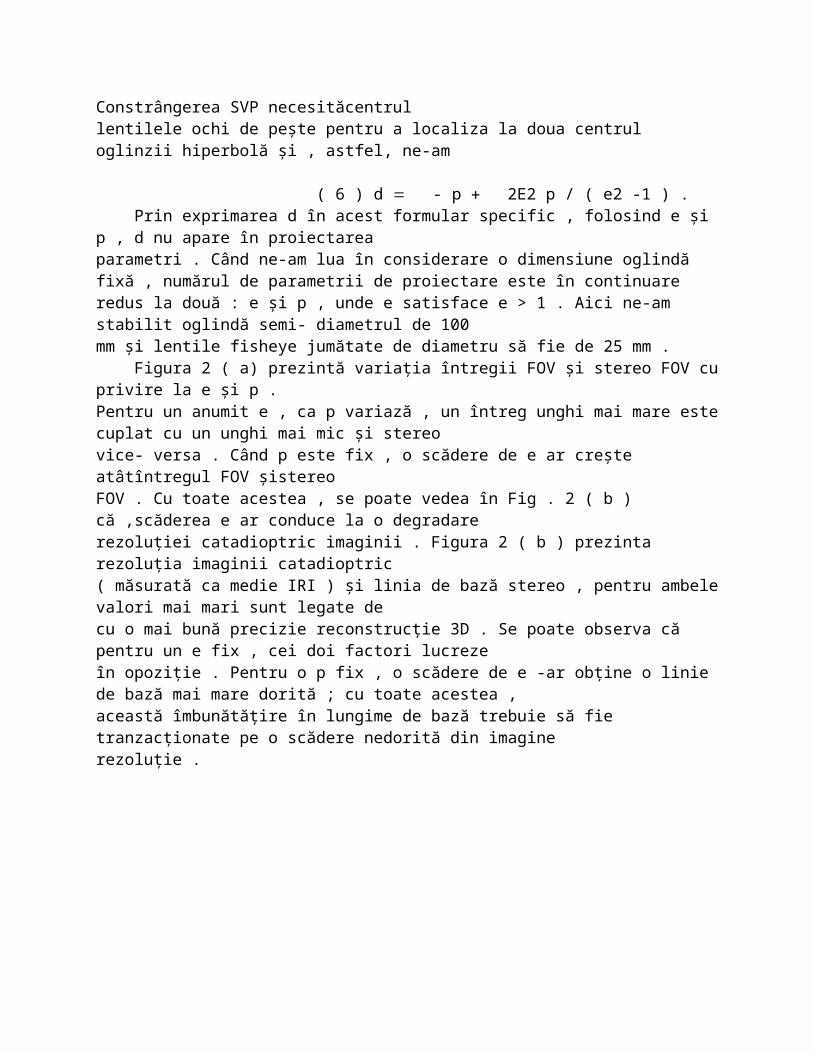
Constrângerea SVP necesităcentrullentilele ochi de pește pentru a localiza la doua centrul oglinzii hiperbolă și , astfel, ne-am ( 6 ) d - p 2E2 p / ( e2 -1 ) . Prin exprimarea d în acest formular specific , folosind e și p , d nu apare în proiectareaparametri . Când ne-am lua în considerare o dimensiune oglindă fixă , numărul de parametrii de proiectare este în continuareredus la două : e și p , unde e satisface e > 1 . Aici ne-am stabilit oglindă semi- diametrul de 100mm și lentile fisheye jumătate de diametru să fie de 25 mm . Figura 2 ( a) prezintă variația întregii FOV și stereo FOV cuprivire la e și p .Pentru un anumit e , ca p variază , un întreg unghi mai mare estecuplat cu un unghi mai mic și stereovice- versa . Când p este fix , o scădere de e ar crește atâtîntregul FOV șistereoFOV . Cu toate acestea , se poate vedea în Fig . 2 ( b ) că ,scăderea e ar conduce la o degradarerezoluției catadioptric imaginii . Figura 2 ( b ) prezinta rezoluția imaginii catadioptric( măsurată ca medie IRI ) și linia de bază stereo , pentru ambelevalori mai mari sunt legate decu o mai bună precizie reconstrucție 3D . Se poate observa că pentru un e fix , cei doi factori lucrezeîn opoziție . Pentru o p fix , o scădere de e -ar obține o linie de bază mai mare dorită ; cu toate acestea ,această îmbunătățire în lungime de bază trebuie să fie tranzacționate pe o scădere nedorită din imaginerezoluție .
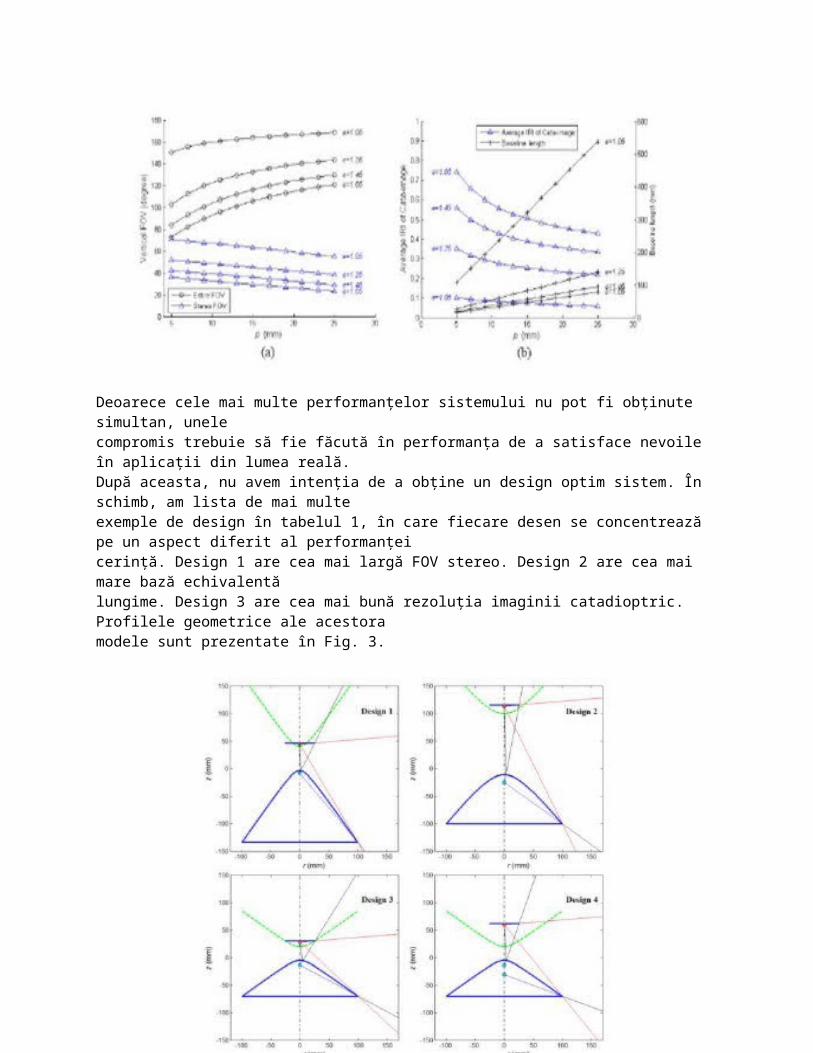
Deoarece cele mai multe performanțelor sistemului nu pot fi obținute simultan, unele compromis trebuie să fie făcută în performanța de a satisface nevoile în aplicații din lumea reală. După aceasta, nu avem intenția de a obține un design optim sistem. În schimb, am lista de mai multe exemple de design în tabelul 1, în care fiecare desen se concentrează pe un aspect diferit al performanței cerință. Design 1 are cea mai largă FOV stereo. Design 2 are cea mai mare bază echivalentă lungime. Design 3 are cea mai bună rezoluția imaginii catadioptric. Profilele geometrice ale acestora modele sunt prezentate în Fig. 3.
Rețineți că design-1, 2 și 3 se află sub constrângerea SVP. Prin relaxarea această constrângere, mai flexibilitate de design este activat. De exemplu, în proiectarea 3, rezoluția imaginii catadioptric ajunge la aproximativ jumătate din cea din imaginea de ochi de pește. Cu toate acestea, lungimea inițială de proiectare 3 este mici. Noi relaxa constrângerea SVP în design 3 pentru a obține de design de 4, în care obiectivul fisheye este mutat mai departe de oglindă. Aceasta mărește efectiv linia de bază echivalentă. Un cost pentru aceasta flexibilitate de design este faptul că sistemul de rezultat nurespectă constrângerea SVP. acest necesită un model de aparat de fotografiat care poate găzdui natura non-SVP a sistemului, care ne trebuie să introducă în secțiunea 4.
5. Un configurare experimental Pentru a demonstra fezabilitatea sistemului propus, o configurare experimental a fost construit ca prezentat în Fig. 5. Toate componentele sunt off-the-raft și sunt conectate la un optic etapă de montare. O camera video color cu o 2/3 "CCD si o rezolutie de1360 pixeli de 1024 pixeli este utilizat. Un Fujinon 1.4 mm obiectiv ochi de pește (FE185C046HA-1) este montat pe aparatul de fotografiat. Diafragma sa este setat la F16.Jumătate-diametrul lentilei este de 28,3 mm.A hiperbolic Oglinda este folosit, care face parte dintr-un senzor omnidirecțional comercială [16].Semi-diametrul oglinzii este de 44 mm. Nodul la distanță vertex dintre lentile fisheye și oglinda suprafață a fost măsurată cu o riglă și este 52,2 mm, cu o valoare incertitudine de 0,1 mm.

excentricitate a oglinzii este 1.44, iar accentul este de 20,1 mm. Urmând metoda similară în secțiunea 3, parametrii de sistem poate fi prezis, pentru care întregul FOV este de 127,2 °, FOV stereo este 19,7 °, linia de bază echivalent este 63,3 mm, iar media IRI este 0.35.
Prin calibrare , parametriimodelului de calcul în secțiunea 4 a fostdeterminat . Pentru configurarea prezentate , vom presupune un model de SVP pentru imaginea de ochi de pește și AModelul non- SVP pentru imaginea catadioptric . Apoi pentru imaginea catadioptric , a0 = 0 , A1= 1.4742 , un 2 = 0,0035 , g = 0 70.3342 , g1 = 0.1441 . Pentru imaginea ochi de pește , b0 = 0 , b1= 0.2830 , b2 = 0,0001 , H0 = 0 . Pe bazacalibrat modelul de calcul ,FOVgranițele poate fi estimată : 1 = 7 ° , 2 = 65 ° , 1 = 60 °, iar 2 = 14 ° . Toate unghiurile suntdefinite în raport cu direcția orizontală . Prin urmare,întregul FOV este de 125 ° (calculateca 1 - 2 ) , în care FOV stereo este de 21 ° (calculate ca 1 - 2 ) . Cu calibrateModelul , toate vârfurile conurilor de vizualizare sunt cunoscute . După aceasta,echivalentul

de bază este calculată cadistanța dintre centrul optic allentilei ochide pește șiPoziția medie de vârfurile de catadioptrice conuri de vizualizare , care este 63.2 mm .IRI medie a imaginii catadioptric este 0.33 . Parametrii sistemului obținute princalibrare sunt în concordanță cupredicție de proiectare . Figura 6 prezintă o imagine luată în mijlocul de o cameră în formăde pătrat de experimentaleconfigurare . Imaginea poate fi descompusă în patru zone concentrice, circulare, ca imagine marcat înfigura . Regiunea A și B sunt calculate cu ajutorul oglinzii și formeazăcatadioptricimagine . Regiune C și D sunt captate prin obiectiv ochi de pește și formează imaginea ochi de pește .Regiunea B și D au un FOV se suprapun și formează perechea de imagine stereo . Se poate observacă punctele corespunzătoare sunt radial coliniare . Un dezvăluirea latitudine - longitudine de Fig . 6este prezentată în Fig . 7 . Aici regiune B și D regiune sunt suprapuse și regiunea numai D este afișat . ease poate observa că întregul FOV verticală este extinsă . Acest lucru permite atât tavan și podea pentru asă fie vizibile în imagine.
Latitudine-longitudine dezvăluirea de regiuni B și regiunea D ca o pereche stereo panoramică este prezentat în Fig. 8 (a) și (b). S-au stabilit corespondențe între un set de puncte de eșantionare cu o baza de fereastră de căutare cross-corelație [17] de-a lungul liniilor de scanare verticală.stabilit punctele corespunzătoare sunt afișate ca crucile peste perechea de imagine. Apoi, disparitatea între o pereche punct de potrivire poate fi calculată ca diferența poziție verticală în stereo pereche. Disparitatea codifica informațiile adâncime de acel punct în spațiul 3D. Figura 8 (c) arată o vizualizare a valorilor de disparitate de perechi de imagine de potrivire. Pentru fiecare pereche
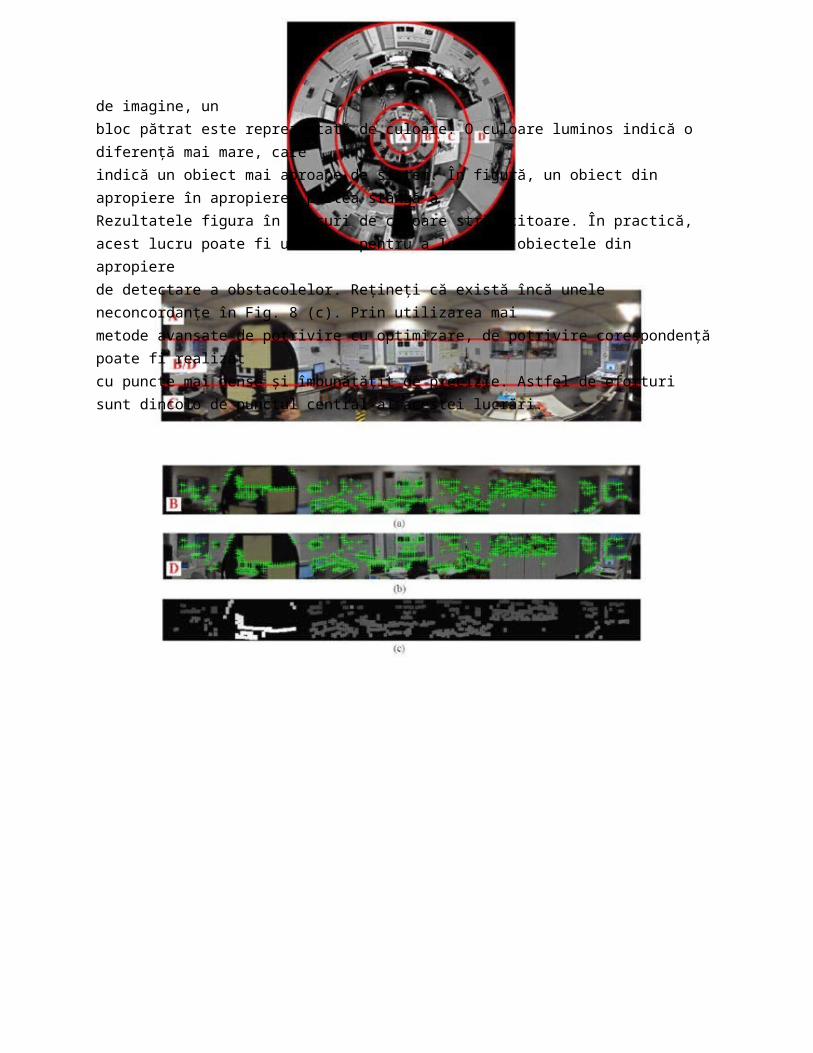
de imagine, un bloc pătrat este reprezentată de culoare. O culoare luminos indică o diferență mai mare, care indică un obiect mai aproape de sistem. În figură, un obiect din apropiere în apropierea partea stângă a Rezultatele figura în blocuri de culoare strălucitoare. În practică, acest lucru poate fi utilizat pentru a localiza obiectele din apropiere de detectare a obstacolelor. Rețineți că există încă unele neconcordanțe în Fig. 8 (c). Prin utilizarea mai metode avansate de potrivire cu optimizare, de potrivire corespondențăpoate fi realizat cu puncte mai dense și îmbunătățit de precizie. Astfel de eforturi sunt dincolo de punctul central al acestei lucrări.
7 . Rezumat și activitatea viitoareAm prezentat un proiect pentru un sistem panoramic viziune stereo . Rezultatele cu oconfigurare experimentale arată că acest sistem poate produce rezultate acceptabile de reconstrucție 3Dîntr-un anumit interval adâncime . Acest design poate oferi o soluție pentru o varietate de aplicațiiîn cazul în care se dorește adâncime panoramică 3D . În special , acest design oferă o mare FOV verticalmonitorizarea mediului înconjurător . În această lucrare , am investigat proiectarea și analiza de comerț pentru configurarea propuse .În prezent ,analiza presupune că toate componentele sunt aliniate coaxial . High- comandăcalculele privindalinierea non - coaxial poate fi considerat a îmbunătățianaliza .De asemenea , un studiu aprofundat cu privire la relația cantitativă dintre parametrii de proiectare șiprecizia de reconstrucție 3D poate fi realizată în activitatea viitoare . O caracteristică de limitare amunca este problema de focalizare de setare interval după cum se menționează în secțiunea 3 . Deși folosind un micdiafragma poate atenua această problemă , timpul de expunere trebuie să fie compromisă , ceea ce estenedorite în aplicații solicitante de viteză . În activitatea viitoare , problema de focalizare poate fi , de asemenea,incluse în analiza de proiectare pentru a da o soluție optimizată pentruproiectarea sistemului .

În folosind un aparat foto obișnuit de a face fotografii panoramice , există o special " nu -Punct de paralaxa " în jurul căruiacamera trebuie rotită în scopul de a menține generate șipuncte de fundal aliniat perfect în cadre suprapuse . Argumente desprelocatie de acest punct sunt atât de frecvente și derutant . Scopul acestui articol este acela de aelimina confuzia . Se explică în termeni simpli care deschiderea determinăperspectivă a unei imagini prin selectarea razele de lumina pe care o formează . Prin urmare,centrulperspectivă și punctul fără paralaxă se află înpoziția aparentă a deschiderii ,numit " elevul de intrare " . Contrar intuiției , acest punct poate fimutat prin modificareadoar diafragma , lasand in acelasi timp toate elementele de lentile derefracție și senzorul în aceeașiloc . De asemenea , unghiul de vedere trebuie să fie măsurate în jurulpunctului nu - și paralaxaAstfel, unghiul de vizualizare este afectată de locația deschidere , nu doar de obiectivul și senzorulașa cum se crede . Vignetare fizic poate provoca obiectivul de intrarepentru a muta ,în funcție de unghi , și ar trebui evitate pentru cusaturi perfecte . În general ,nu -Punct de paralaxa este diferit de " punct nodal " de designeri optice , în ciuda frecventeutilizați ( utilizarea abuzivă ), din care pe termen printre fotografipanoramice .
introducereÎn folosind un aparat foto obișnuit de a face fotografii panoramice , există o special " nu -Punct de paralaxa " 1 în jurul căruiacamera trebuie rotită în scopul
de a menține generate șipuncte de fundal aliniat perfect în cadre suprapuse . Argumente desprelocatie de acest punct sunt atât de frecvente și derutant . Acestea implică afirmații de genulacestea :" Razele de lumina care formeaza o imagine trebuie să treacă tot prin pupila de intrare . "" Adăugarea unui deschidere nu se schimba calea luminii printr-o lentilă . "" Unghiul de vedere este determinată pur și simplu de mărimea senzorului și distanța focală a obiectivului . "Aceste afirmații aparent simple , și alții ca ei , au fost sursa de mareconfuzie cu privire la locația punctului de nu - paralaxă . ( Cea de atreia din aceste declarații estechiar greșit , în cazul general ! )Scopul acestui articol este de a elimina confuzia . Se explică în termeni simpli de cepunctul nu - paralaxa este situat la obiectivul de intrare , este , deasemenea,centrul de perspectivă , șipot fi mutate prin modificarea doar diafragma , lasand in acelasi timptoate elementele de lentile de refracțieși senzorul în același loc . Aceasta explică , de asemenea, modul în care unghiul de vedere ( Panorama ToolsHFOV ) este de fapt determinată de poziția punctului de nu - paralaxa , nu doar obiectivul șisenzor . Și, în cele din urmă , se explică de ce vignetare fizic poateprovoca copci rău în plus1
de benzi întunecate . De-a lungul drum , se clarifică faptul că punctul nu - paralaxa este mult diferit de" punct nodal ", designerul obiectiv , în ciuda utilizarea pe scară largă a acestui termen în rândul panoramafotografi .Atenție : pentru a înțelege pe deplin punctul de nu - paralaxă , va
trebui să renunțe la unele lung -convingerile deținute. De exemplu , dacă insiști că " unghiul de vedere este determinată pur și simplu desenzor de dimensiuni și lungimea focală a obiectivului " , atunci vețifi în necaz . Această afirmație este adevărată numaiîn cazuri specifice , care domina , din păcate, literatura de specialitate și au devenit înrădăcinatăîn gândirea noastră . Doar o minte deschisă - toate vor fi explicate .
Ray - Tracing o subțire LensSe pare că mare perspectivă poate fi obținută prin urmărirea cu atenție ray - o extrem de simplasistem optic : un singur " lentilă subțire " .Pentru a urmări razele printr-o lentilă subțire , este nevoie de doar trei reguli :1 . Toate razele care intră lentilăparalel cu axa optică sunt îndoite pentru a trece printr -o singură punct de peaxa optică , o lungime focala exact distanță deplanullentilei .2 . Toate razele trec prin centrul lentilei nu sunt îndoite la toate .3 . Toate raze pornind de la un singur punct de obiect sunt îndoite sătreacă printr- o singură imagine punct , indiferent de locul unde se intra in obiectiv .Aceste reguli sunt complet suficiente pentru a genera modelul algebrică standard de un strat subțirelentilă , că 1 / f = 1 / O + 1 / i , unde f este distanța focală , o este distanța până la obiect , și idistanța până la imaginea sa . Cu toate acestea , în scopul acestei lucrări , este mult mai eficient săutilizează razele direct .Luați în consideraresituația prezentată în figurile 1 și 2 . Pe parteastângă , două săgeți servi dreptobiecte . Pe partea dreaptă , există un plan de imagine , desemnat de IP . Săgeata spre dreaptase întâmplă să fie în centrul atenției la IP ; săgeata stânga se concentrează oarecum mai aproape de obiectiv și este în afara
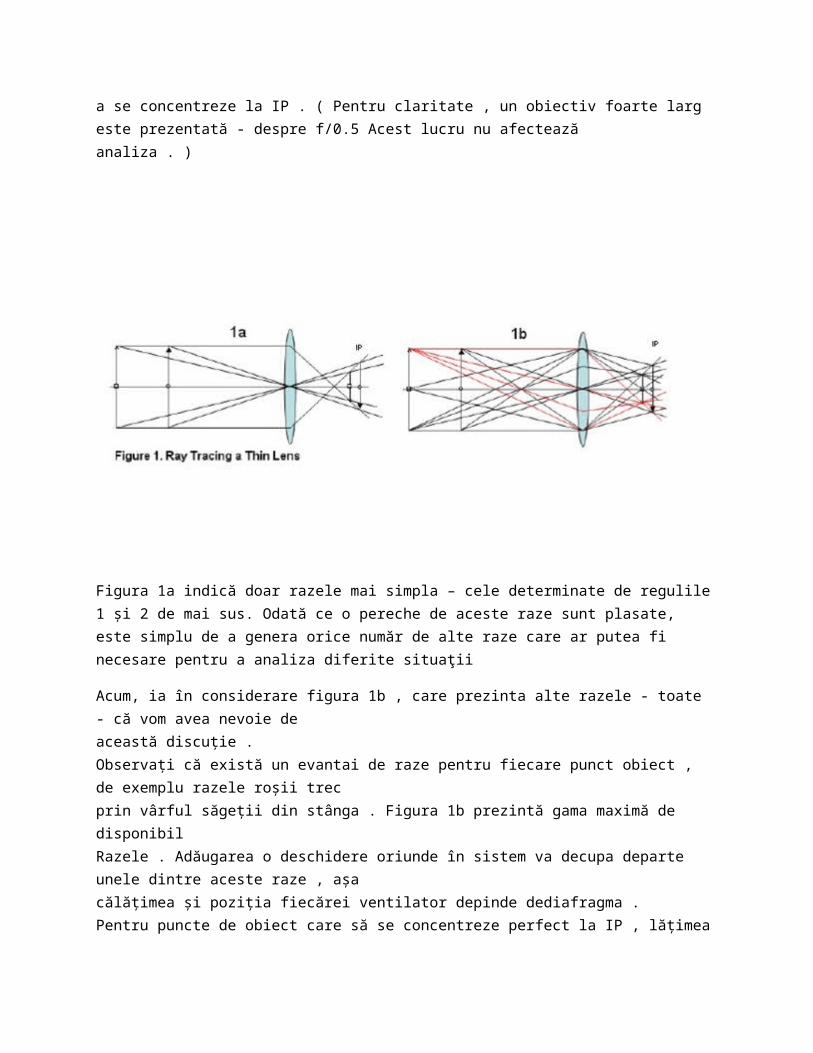
a se concentreze la IP . ( Pentru claritate , un obiectiv foarte larg este prezentată - despre f/0.5 Acest lucru nu afecteazăanaliza . )
Figura 1a indică doar razele mai simpla – cele determinate de regulile1 și 2 de mai sus. Odată ce o pereche de aceste raze sunt plasate, este simplu de a genera orice număr de alte raze care ar putea fi necesare pentru a analiza diferite situaţii
Acum, ia în considerare figura 1b , care prezinta alte razele - toate - că vom avea nevoie deaceastă discuție .Observați că există un evantai de raze pentru fiecare punct obiect , de exemplu razele roșii trecprin vârful săgeții din stânga . Figura 1b prezintă gama maximă de disponibilRazele . Adăugarea o deschidere oriunde în sistem va decupa departe unele dintre aceste raze , așacălățimea și poziția fiecărei ventilator depinde dediafragma .Pentru puncte de obiect care să se concentreze perfect la IP , lățimea
și localizarea ventilatorului ray este de nici unimportanță . Toate aceste raze converg în același punct de imagine . Clipping departe unele deei nu are nici un efect cu excepția pentru a face imaginea mai puțin strălucitoare .Pentru puncte de obiect care nu se concentreze perfect la IP , lățimeași localizarea ventilatorului ray esteimportanța critică . Aceste raze formează o neclaritate în planul imagine la IP . telespectatorii identificacentrul neclarității ca locație aparentă a punctului obiect . Când obiectivul este largdeschis , blur este mare . Când o parte din razele sunt tăiate ( blocate ) cu o deschidere ,Razele rămase formează o ceață mai mică , și, în pluscentrul neclaritatea poate fi mutat .Dacă ventilatorul tuns devine suficient de mică , imaginea unui punct de out-of- focus poatepar clare , dar încă poziția sa se poate schimba în funcție de care razele obține prindeschidere .Figura 2 prezintă ceea ce se întâmplă atunci când o diafragmă mică este introdus în diferite poziții .Diafragma , prezentată de un cerc galben , clipuri distanță toate razele cu excepția celor care trecprin ea . Pentru claritate , aceste diagrame arată numai razele de săgeata out-of - focus , șiimaginea ușor neclară din care săgeata la PI este prezentat ca o bară roșie .

In figurile 2a , 2b , 2c și , am lăsadiafragma în planullentilei , daraceasta schimbare trans-axe . În 2d , vom muta diafragma în fața obiectivului , mai aproape deobiectele .Ca schimburi diafragmei , imaginea de focalizare de pe săgeata din dreapta rămâne în exact aceeașiloc , pentru că toate razele de săgeata din dreapta converg la un singur punct în imagine .Dar poziția și dimensiunea out-of- focus schimbărilor de imagine în funcție de diafragmapoziție .În 2a , 2b , și 2c , imaginea out-of - focus doar schimburi în sus și în jos . Observați că în 2aimagini de săgețile sunt aliniate , în 2b centrele săgețile sunt aliniate , iar în2c cozile săgețile sunt aliniate . În fiecare caz , imaginea de la IP este în concordanță cuCentrul de perspectivă fiind la locul deschiderii .Figura 2d este, probabil, cel mai interesant . Imaginea out-of - focusa devenit mai mici !Din nou , acest lucru este în concordanță cu centrul de perspectivă
fiind situat ladiafragma , acumrelativ aproape de săgeata de focalizare decât out-of- focus .Rezumând până acum ... În general , atunci când impune o deschidere mică , imaginea de focalizarerămâne aceeași , cu excepția pentru obtinerea Dimmer ca ne-am face diafragma mai mici . Out - of-imagine se concentreze , de asemenea, devine Dimmer , cu aceeași sumă , în medie , dar acest lucru este realizatprin lăsând intactă partea deumbra care corespunde cucentrulperspectivă la deschiderea , în timp ce eliminarea tuturor alte porțiuni ale blur . Nu numaicercurile blur obține mai mici , dar centrele lor de schimbare de locație. Dacă aveți obiecte ladistanțe diferite , apoi imaginile lor schimbare și scară de valori diferite, care suntînsuși pentru a aveacentrul de perspectivă la diafragma . Toate acestea se intampla doar printăiere fanii ray .
Lentile de reali ( Thick Lens modelul )Analiza anterioară pentru o lentilă subțire ar trebui să facă clar că punctul și nu - paralaxaCentrul de perspectivă , sunt dispuse la diafragma , cel puțin atunci când se află diafragmaîn planul de lentila sau pe partea de obiect a acesteia .Dar ce se intampla cu o lentilă reală , în care se află diafragma dintre lentileleelemente ? Și ceea ce este acest lucru numit un " punct nodal " , oricum ?Nu avem suficient spatiu aici pentru a discuta aceste probleme în detaliu , dar o scurtărezumat să răspundă la întrebările suficient de bine pentru scopurile noastre .Atunci când diafragma este situat oriunde în spatele elementului lentilă frontală , și te uițiprin partea din față a lentilei ,diafragma pare a fi pur și simplu la
o locație diferită șidimensiune decât este în realitate . ( Gândiți-vă de a privi la un inel printr- o lupă . ) Aceastăpoziție și dimensiune a deschiderii aparent se numește " pupila de intrare " .Gândire din nou despre discuția mai devreme , ar trebui să fie acum evident cănu - paralaxapunct și centrul de perspectivă sunt, de fapt situat la obiectivul de intrare . raze delumină îndreptată spre obiectivul de intrare sunt îndoite de elemente de lentile , trec prindiafragma , sunt îndoite mai mult de alte elemente de obiectiv , și încele din urmă a lovit senzorul . detaliilede îndoire sunt destul de irelevant pentru determinarea centrului de perspectivă .Se pare că detaliile de îndoire sunt destul de irelevant pentru multe alte scopuride asemenea . De fapt , cele mai multe obiective pot fi aproximată destul de aproape de un simplu " obiectiv grosModelul " care are două suprafețe refractare separate printr-un decalaj . Razele pot fi urmărite printr -unlentilă groasă folosind reguli care sunt similare cu cele ale unei lentile subțiri , dar cu mai mulți parametri .În cazul în care o lentilă subțire are un singur parametru ( distanța focală ) , o lentilă groasă are șase . în conformitate cu cele maicircumstanțe , unii dintre parametrii devin redundant.2Modelul lentilăgroasă atunci aretrei parametri independente : o distanță focală și două " puncte focale" , din care două
27 " Puncte de legătură " = "puncte principale " sunt determinate . Planuri perpendiculare pe suportul opticaxa și trece prin principalele puncte sunt numite " planuri principale" . aceste puține
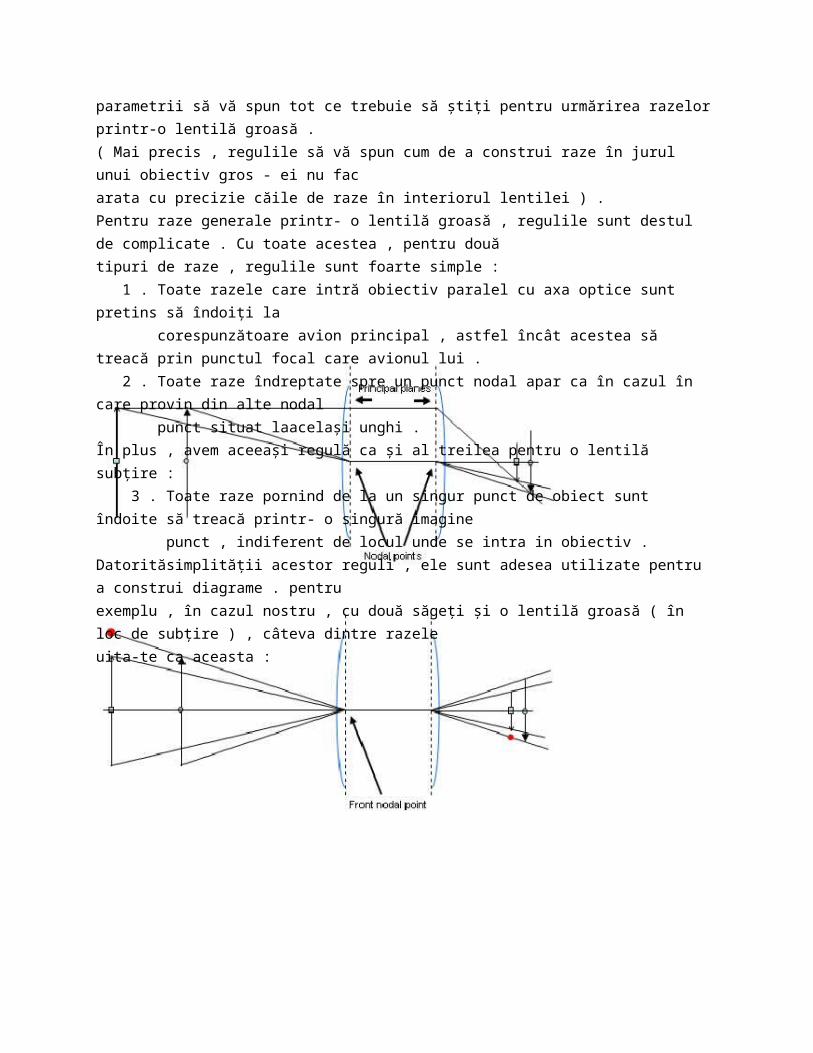
parametrii să vă spun tot ce trebuie să știți pentru urmărirea razelorprintr-o lentilă groasă .( Mai precis , regulile să vă spun cum de a construi raze în jurul unui obiectiv gros - ei nu facarata cu precizie căile de raze în interiorul lentilei ) .Pentru raze generale printr- o lentilă groasă , regulile sunt destul de complicate . Cu toate acestea , pentru douătipuri de raze , regulile sunt foarte simple : 1 . Toate razele care intră obiectiv paralel cu axa optice sunt pretins să îndoiți la corespunzătoare avion principal , astfel încât acestea să treacă prin punctul focal care avionul lui . 2 . Toate raze îndreptate spre un punct nodal apar ca în cazul în care provin din alte nodal punct situat laacelași unghi .În plus , avem aceeași regulă ca și al treilea pentru o lentilă subțire : 3 . Toate raze pornind de la un singur punct de obiect sunt îndoite să treacă printr- o singură imagine punct , indiferent de locul unde se intra in obiectiv .Datorităsimplității acestor reguli , ele sunt adesea utilizate pentru a construi diagrame . pentruexemplu , în cazul nostru , cu două săgeți și o lentilă groasă ( în loc de subțire ) , câteva dintre razeleuita-te ca aceasta :

noi credem că diagrame ca aceasta ultima au contribuit mult la confuzia cu privire la punctul nu-paralaxă. Nu există nici o dezbatere care aceste raze sunt trase în mod corect, și cu care se confruntă cu această diagramă, se pare evident că trebuie să se rotească în jurul punctului nodal din față. Ce alt punct am putea roti în jurul, care ar ține punct roșu și negru vârf de săgeată aliniat cu celălalt? Problema, desigur, este că modul în care această schemă este atras forțează o incorect concluzie. Prin alegerea de a atrage aceste raze, și numai aceste raze, ne-au atras diagrama ca și în cazul în care ar exista o foarte mica elev intrare centrat pe punctul nodal. Rezultatul ar trebui să fie nici o surpriza de acum - plasarea elevului de intrare la cele pune punct nodal centrul de perspectivă acolo.
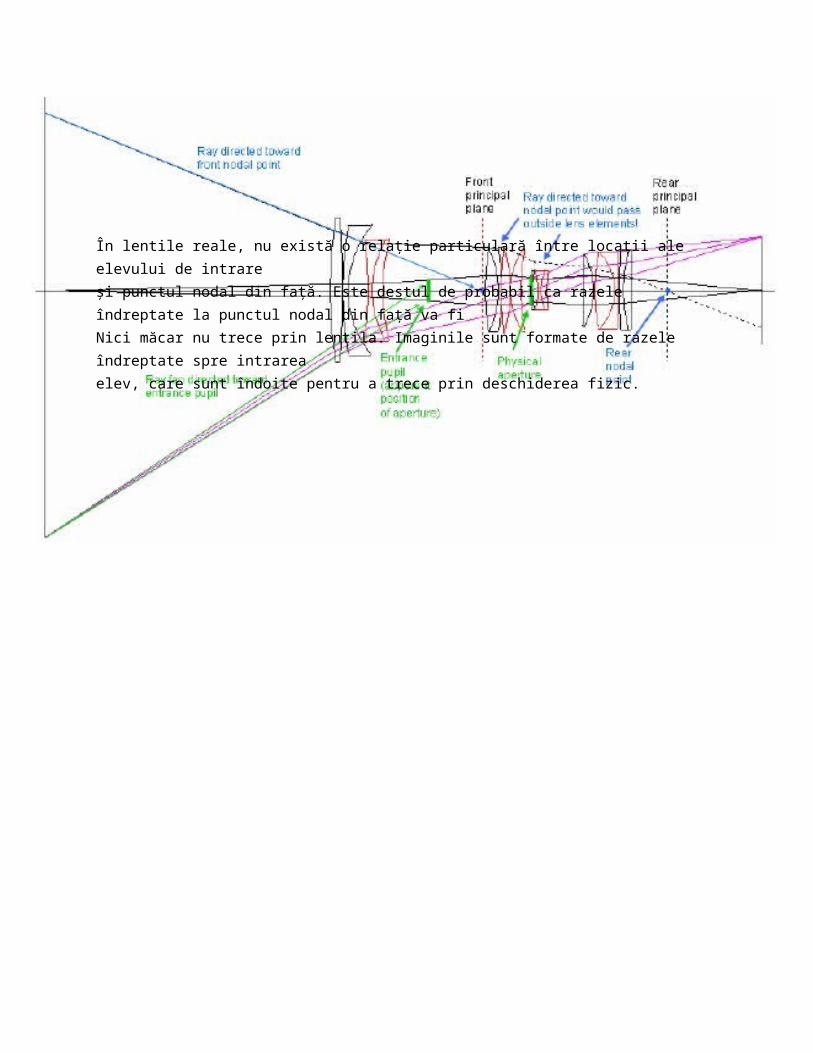
În lentile reale, nu există o relație particulară între locații ale elevului de intrare și punctul nodal din față. Este destul de probabil ca razele îndreptate la punctul nodal din față va fi Nici măcar nu trece prin lentila. Imaginile sunt formate de razele îndreptate spre intrarea elev, care sunt îndoite pentru a trece prin deschiderea fizic.
Distincția dintre punctul nodal din față și de intrare elev = punct nu-paralaxa = centru de perspectivă nu este doar academic. Aceste locații pot fi foarte departe unul de altul în practică lentilele, cum ar fi tele prezentat aici.
rezumat Am explicat și ilustrat de următoarele puncte. Punctul de vedere al unei imagini este determinată de razele de luminape care o formează. deoarece volumul deschidere selectează aceste raze, locația sa determină perspectiva. Centrul de perspectivă și punctul nu-paralaxă sunt unul și același lucru, și se află în centrul de obiectivul de intrare. Poziția de designer optic de "punct nodal din față" este irelevant. Unghiul de vizualizare (Instrumente Panorama HFOV) se măsoară în jurul centrului de perspectivă, punctul de nu-paralaxă. Ar trebui să fie evitate vignetare fizic, deoarece acesta poate

cauza obiectivul de a avea doar o colecție de puncte de "cel mai puțin-paralaxa" în loc de un singur nu-Punct de paralaxă.









![of]u stf{k'l:tsf - OHCHR-Nepal](https://static.fdokumen.com/doc/165x107/6323e471f021b67e74084c0c/ofu-stfkltsf-ohchr-nepal.jpg)










