Principios Fundamentales
11
MECÁNICA DE LOS SÓLIDOS PRINCIPIOS FUNDAMENTALES INSTITUTO BALSEIRO
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Principios Fundamentales

MECÁNICA DE LOS SÓLIDOS
PRINCIPIOS FUNDAMENTALES
I N S T I T U T O B A L S E I R O

2
MECÁNICA DE LOS SÓLIDOS PRINCIPIOS FUNDAMENTALES
INTRODUCCIÓN
Se puede definir la mecánica Newtoniana, sintéticamente, como la ciencia de las fuerzas y los movimientos. Se desarrolla a partir de ciertos conceptos básicos y algunos postulados fundamentales.
Tradicionalmente se divide el estudio de la mecánica en: estática, cinemática y dinámica.
Los conceptos básicos son: longitud, tiempo, masa y fuerza.
El concepto de longitud está basado en la formulación de la geometría Euclidiana tridimensional. Esta constituye el dominio físico o espacio donde se desarrollan los problemas de la mecánica. Dentro de la geometría euclidiana se desarrollan los conceptos de punto, recta, superficie, ángulos, congruencia, paralelismo, distancia, etc. así como diversas definiciones, postulados y teoremas, tales como el teorema de Pitágoras.
El espacio Euclidiano es homogéneo e isótropo por lo que no existe ninguna posición u orientación preferida.
En la descripción de los problemas se adoptan sistemas de referencia. Los más usuales son: el sistema cartesiano ortogonal, los sistemas de coordenadas polares y cilíndricas y las coordenadas esféricas.
Al introducir el concepto de tiempo surge el estudio de la cinemática o geometría del movimiento. En la mecánica Newtoniana se considera que el tiempo es absoluto y fluye del pasado hacia el futuro en forma independiente del espacio.
La cinemática desarrolla en primera instancia la cinemática del punto, es decir el movimiento de un punto geométrico con respecto a un sistema de referencia y posteriormente el movimiento de un sistema de referencia móvil con respecto a otro considerado fijo.
En la cinemática del punto se definen los conceptos de: desplazamiento, velocidad y aceleración.
Cuando estudiamos los sistemas de referencia móvil surgen los conceptos de velocidad y aceleración relativa así como el concepto de velocidad de rotación.
El estudio de la dinámica introduce el concepto de masa que al ser asignada a un punto geométrico da origen al concepto de punto material o partícula.
Un conjunto finito o infinito de puntos materiales constituye un cuerpo.

3
Los cuerpos se pueden clasificar en rígidos y deformables. En los cuerpos rígidos la distancia entre dos puntos del mismo permanece constante, caso contrario se denominan deformables.
Los postulados que rigen el movimiento de un punto material fueron formuladas por Newton en sus conocidas tres leyes. De estas surge el concepto de fuerza que completa el conjunto de conceptos básicos.
Las fuerzas se manifiestan de dos formas diferentes:
1) Por su efecto sobre el movimiento de un cuerpo
2) Por el cambio de forma que produce en cuerpos deformables
También dentro de los postulados fundamentales se incluye la conocida como Ley de Stevin (o Stevinius). Esta especifica el carácter vectorial de la fuerzas al afirmar que si dos fuerzas actúan sobre una partícula en forma simultánea, el efecto resultante es equivalente al de una sola fuerza que se obtiene como la suma vectorial de ambas (regla del paralelogramo).
La tercera ley de Newton, también conocida como ley de acción y reacción reza que si una partícula ejerce sobre otra una fuerza, ésta última ejercerá sobre la primera una fuerza igual y de sentido contrario.
Se suele clasificar a las fuerzas en:
1) de contacto
2) de acción a distancia
Las fuerzas de contacto requieren el contacto físico de dos cuerpos para ser ejercidas.
Las fuerzas de acción a distancia se ejercen sin necesidad de un medio material entre los cuerpos. Dentro de las mismas se encuentra la fuerza de gravedad, electrostática, magnética, etc.
La primera ley de Newton dice que si la suma de las fuerzas que actúan sobre una partícula es nula, esta se encontrará en equilibrio o se desplazará con movimiento rectilíneo uniforme.
La segunda ley de Newton dice que la aceleración de una partícula es proporcional a la suma vectorial de las fuerzas que actúan sobre la misma e inversamente proporcional a la masa de la misma.
De esta afirmación surge el concepto de sistema de referencia inercial. Un sistema de referencia inercial es aquél dentro del cual se cumplen las leyes de Newton. La existencia de sistemas de referencia inerciales es una aproximación que tiene validez para analizar problemas en un dominio espacial acotado, en un lapso de tiempo acotado y con un error acotado.
La tierra puede ser un marco de referencia inercial adecuado para analizar con suficiente aproximación la dinámica de un motor, pero no serlo para analizar un péndulo de Foucault.

4
Dado un sistema de referencia inercial, cualquier otro sistema que se desplace con movimiento de traslación rectilíneo uniforme con respecto al primero también constituye un sistema de referencia inercial.
Se define como punto de aplicación de una fuerza al de la partícula sobre la que actúa dicha fuerza.
Se define el momento de una fuerza con respecto a un punto del espacio, al producto vectorial del vector que se dirige del punto de referencia al punto de aplicación de la fuerza por dicha fuerza.
El momento es una magnitud vectorial y la proyección del mismo sobre una recta que pase por el punto de referencia se conoce como momento de la fuerza con respecto a un eje.
Se denomina par de fuerzas o cupla a dos fuerzas paralelas de igual magnitud y sentido contrario que actúan sobre rectas paralelas.
El momento de una cupla con respecto a cualquier punto del espacio es el mismo y se obtiene como el producto vectorial de una de las fuerzas por el vector que se dirige del punto de aplicación de la segunda fuerza al punto de aplicación de la primera.
Si una partícula se encuentra en equilibrio, la suma de los momentos de las fuerzas que actúan sobre la misma será igual a cero.
Cuando estudiamos el equilibrio o dinámica de cuerpos (sistemas de partículas) conviene distinguir entre fuerzas internas y externas. Las primeras se ejercen entre partículas que pertenecen al mismo y aparecen como pares que se cancelan de acuerdo al la tercera ley de Newton.
Si un cuerpo se encuentra en equilibrio, la suma de las fuerzas que actúan sobre cada partícula es cero por lo que la suma de las fuerzas que actúan sobre todo el cuerpo también es cero. Como las fuerzas internas se cancelan entre si, también la suma de las fuerzas externas debe ser cero (condición necesaria para el equilibrio).
También en un cuerpo en equilibrio la suma de los momentos con respecto a un punto de referencia arbitrario es cero y como los momentos de las fuerzas internas se cancelan entre si, también la suma de los momentos de las fuerzas externas debe ser cero (condición necesaria para el equilibrio).
Sólo en los cuerpos rígidos estas condiciones son necesarias y suficientes para el equilibrio y el análisis de equilibrio se reduce a un sistema de seis ecuaciones algebraicas. Si las fuerzas que actúan sobre el cuerpo rígido son coplanares, el número de ecuaciones se reduce a tres.
Se denominan condiciones de vínculo a las restricciones geométricas que se imponen sobre el desplazamiento de un cuerpo (o sobre las partículas que lo constituyen). Se puede lograr el mismo efecto reemplazando dicha condición de vínculo por una fuerza llamada reacción de vínculo que produce el mismo efecto.
Dicha metodología se utiliza para el análisis de estructuras y se la conoce como análisis de cuerpo libre.

5
Las condiciones de vínculo también pueden ser internas y vincular subsistemas de un mismo cuerpo. En este caso el análisis de equilibrio se puede plantear para cada subsistema donde los vínculos son reemplazados por las reacciones correspondientes.
Para cuerpos deformables, las condiciones de equilibrio se deben cumplir en todo subsistema que sea posible aislar del mismo para poder asegurar el equilibrio de todo el cuerpo.
Se denominan elementos de dos fuerzas (Figura 1) a aquellos cuerpos que se vinculan con otros en dos puntos del mismo. Las fuerzas externas que actúan en los mismos deben ser actuar sobre la recta determinada por dichos puntos y ser de igual magnitud y sentido contrario para asegurar el equilibrio.
Figura 1: Elemento de dos fuerzas
Ejemplos de elementos de dos fuerzas utilizados en los modelos de estructuras y máquinas son los denominados chapas (cuerpos rígidos), cuerdas, resortes ideales y amortiguadores.
Se denominan elementos de tres fuerzas (Figura 2) a aquellos cuerpos que se vinculan con otros en tres puntos. Para asegurar el equilibrio las tres fuerzas deben ser coplanares e intersectarse en un mismo punto.
Si el punto de intersección se aleja infinitamente, las tres fuerzas resultan coplanares y paralelas.
Ejemplos de los elementos de tres fuerzas son la palancas, poleas, etc.
Figura 2: Elemento de tres fuerzas
APLICACIONES INGENIERILES
Las principales aplicaciones de esta disciplina corresponden al análisis de estructuras y elementos de máquinas.

6
Se procede en primera instancia a la:
1) Elección del sistema
2) Idealización de las características del mismo
El análisis se puede dividir en tres fases:
1) Estudio de las fuerzas y condiciones de equilibrio
2) Estudio de las deformaciones y condiciones de compatibilidad geométrica
3) Aplicación de relaciones entre fuerza y deformación
Se denominan sistemas estáticamente determinados a aquellos en los que es posible determinar todas las fuerzas involucradas solamente de las condiciones de equilibrio utilizando el análisis de cuerpo libre para los diferentes subsistemas.
CONCEPTO DE CONTÍNUO
Cuando las dimensiones características del cuerpo son mucho mayores que los elementos constituyentes de las microestructura (ya sean átomos, moléculas o granos) se puede utilizar el modelo de continuo en el que se supone una distribución continua de la materia. Esta hipótesis se suele utilizar asociándola a la descripción de campo asociando cada partícula a un continuo de coordenadas de números reales.
En este caso se pueden adoptar dos tipos de descripciones:
La descripción Lagrangiana se refiere a partículas de identidad fija identificadas por las coordenadas de su posición inicial (antes de ser sometidas a un sistema de fuerzas y a la deformación resultante del mismo)
La descripción de Euler se refiere a posiciones fijas del espacio y es la descripción normalmente adoptada en la descripción de fluidos.
IDEALIZACIONES MÁS COMUNES
1) Cuerpo perfectamente rígido
2) Superficie sin fricción (reacción de vínculo normal a la misma)

7
3) Superficie con fricción ( F N )
4) Unión articulada sin fricción
5) Cojinete sin fricción
6) Cable inextensible, perfectamente flexible y sin masa
7) Empotramiento ideal

8
SUPERFICIE CON FRICCIÓN
En una superficie con fricción se genera aparte de la reacción de vínculo normal, una componente tangencial que no puede exceder al valor de la componente normal multiplicada por un coeficiente de fricción (fricción estática). Este depende de los materiales en contacto y del estado de lubricación o contaminación de la superficie.
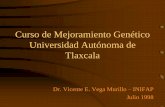
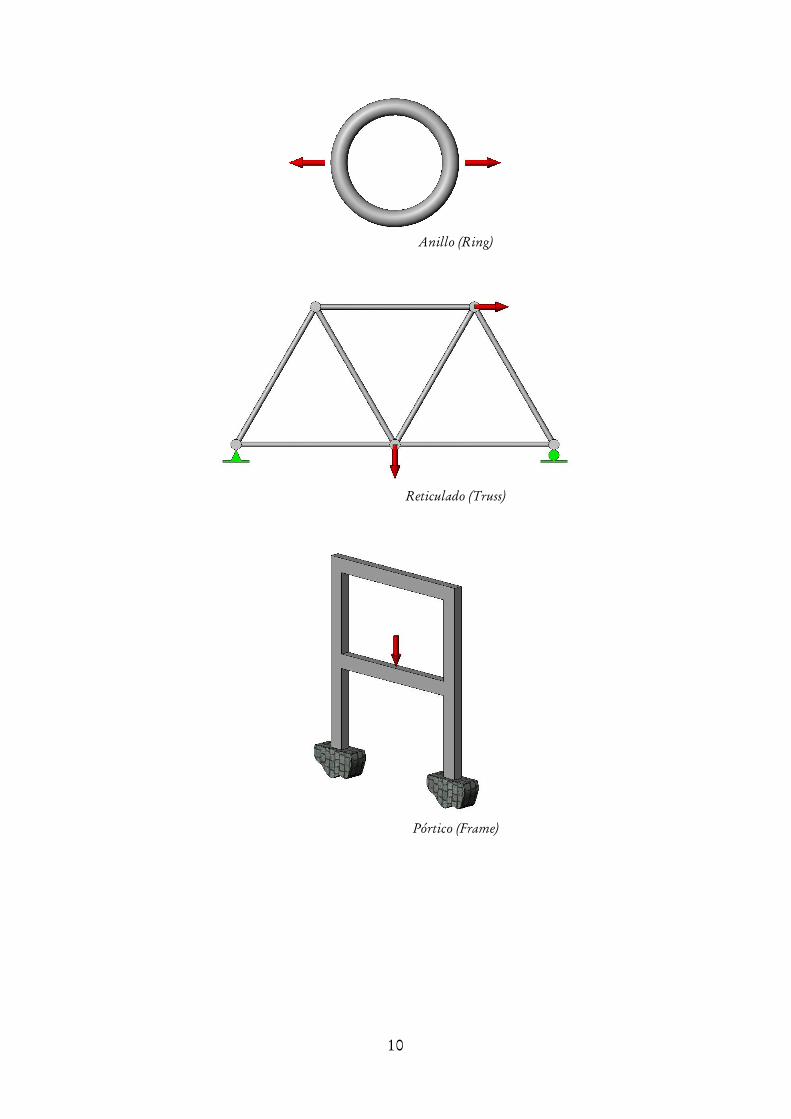
ELEMENTOS ESTRUCTURALES
Las siguientes figuras muestran los diversos elementos estructurales:
Barra (Rod)
Columna (Column)
Eje (Shaft)
Viga (Beam)

9
Viga traccionada (Tension beam)
Viga columna (Column beam)
Viga de eje curvo (Curved beam)
Arco (Arch)
10
Anillo (Ring)
Reticulado (Truss)
Pórtico (Frame)
11
Panel (Panel)
Placa (Plate)
Cáscara (Shell)