
PENGENDALIAN SISTEM PNEUMATIK MENGGUNAKAN ...
127
MODUL ELEKTRONIKA DAN MEKATRONIKA PENGENDALIAN SISTEM PNEUMATIK MENGGUNAKAN PLC SIEMENS S7 PC-300 OLEH BUDIYANTO BUKU SERIAL REVITALISASI SMK
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of PENGENDALIAN SISTEM PNEUMATIK MENGGUNAKAN ...
M O D U L E L E K T R O N I K A DA N M E K AT R O N I K A
P E N G E N DA L I A N S I S T E M P N E U M AT I K M E N G G U N A K A N P L C S I E M E N S S 7 P C - 3 0 0
O L E H B U D I YA N T O
B U K U S E R I A L R E V I TA L I S A S I S M K

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
1
MODUL PENGENDALIAN SISTEM PNEUMATIK MENGGUNAKAN PLC SIEMENS S7 PC-300
Untuk Sekolah Menengah Kejuruan Edisi Tahun 2017
KEMENTERIAN PENDIDIKAN DAN KEBUDAYAANDIREKTORAT JENDERAL PENDIDIKAN DASAR DAN MENENGAHDIREKTORAT PEMBINAAN SEKOLAH MENENGAH KEJURUAN
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
2
MODUL PENGENDALIAN SISTEM PNEUMATIK MENGGUNAKAN PLC SIEMENS S7 PC-300Copyright © 2017, Direktorat Pembinaan SMKAll rights Reserved
Pengarah
Direktur Pembinaan SMK
Penanggung JawabArie Wibowo Khurniawan, S.Si. M.AkKasubdit Program dan Evaluasi, Direktorat Pembinaan SMK
Ketua TimArfah Laidiah Razik, S.H., M.A.Kasi Evaluasi, Subdit Program dan Evaluasi, Direktorat Pembinaan SMK
PenyusunBudiyanto(SMK Ma’arif Kota Mungkid Jawa Tengah)
Desain dan Tata LetakRayi Citha Dwisendy, S.Ds
ISBN
Penerbit:Direktorat Pembinaan Sekolah Menengah KejuruanKomplek Kementerian Pendidikan dan Kebudayaan, Gedung E, Lantai 13Jalan Jenderal Sudirman, Senayan, Jakarta 10270
ISBN 978-602-5517-02-0
978-602-5517-02-0 9 786025 517020

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
i
KATA PENGANTAR KASUBDIT PROGRAM DAN EVALUASI
Assalamu’alaikum Warahmatullahi WabarakatuhSalam Sejahtera,
Melalui Instruksi Presiden (Inpres) Nomor 9 Tahun 2016 tentang Revitalisasi Sekolah Menengah Kejuruan (SMK), dunia pendidikan khususnya SMK sangat terbantu karena akan terciptanya sinergi antar instansi dan lembaga terkait sesuai dengan tugas dan fungsi masing-masing dalam usaha mengangkat kualitas SMK. Kehadiran Buku Serial Revitalisasi SMK ini diharapkan dapat memudahkan penyebaran informasi bagaimana tentang Revitalisasi SMK yang baik dan benar kepada seluruh stakeholder sehingga bisa menghasilkan lulusan yang terampil, kreatif, inovatif, tangguh, dan sigap menghadapi tuntutan dunia global yang semakin pesat. Buku Serial Revitalisasi SMK ini juga diharapkan dapat memberikan pelajaran yang berharga bagi para penyelenggara pendidikan Kejuruan, khususnya di Sekolah Menengah Kejuruan untuk mengembangkan pendidikan kejuruan yang semakin relevan dengan kebutuhan masyarakat yang senantiasa berubah dan berkembang sesuai tuntuan dunia usaha dan industri. Tidak dapat dipungkuri bahwa pendidikan kejuruan memiliki peran strategis dalam menghasilkan manusia Indonesia yang terampil dan berkeahlian dalam bidang-bidang yang sesuai dengan kebutuhan. Terima kasih dan penghargaan kami sampaikan kepada semua pihak yang terus memberikan kontribusi dan dedikasinya untuk meningkatkan kualitas Sekolah Menengah Kejuruan. Buku ini diharapkan dapat menjadi media informasi terkait upaya peningkatan kualitas lulusan dan mutu Sumber Daya Manusia (SDM) di SMK yang harus dilakukan secara sistematis dan terukur.
Wassalamu`alaikum Warahmatullahi Wabarakatuh
Jakarta, 2017
Kasubdit Program dan Evaluasi Direktorat Pembinaan SMK
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
ii
KATA PENGANTAR .................................................................................................................. ii
DAFTAR ISI ............................................................................................................................. iii
DAFTAR GAMBAR .................................................................................................................. vi
DAFTAR TABEL ........................................................................................................................ x
PETA KEDUDUKAN MODUL ................................................................................................... xi
GLOSARIUM ............................................................................................................................xii
PENDAHULUAN ....................................................................................................................... 1
A. STANDAR KOMPETENSI ...................................................................................... 1
B. DESKRIPSI MATERI PEMBELAJARAN ................................................................ 4
C. WAKTU ................................................................................................................... 4
D. PRASYARAT .......................................................................................................... 4
E. PETUNJUK PENGGUNAAN MODUL ..................................................................... 5
F. TUJUAN AKHIR ..................................................................................................... 5
G. CEK PENGUASAAN STANDAR KOMPETENSI ..................................................... 5
BAB II ........................................................................................................................................ 7
KEGIATAN PEMBELAJARAN .................................................................................................. 7
A. RENCANA BELAJAR SISWA ................................................................................. 7
B. KEGIATAN PEMBELAJARAN ................................................................................ 7
1. KEGIATAN PEMBELAJARAN 1 ............................................................................. 7
SISTEM PNEUMATIK ................................................................................................. 7
A. Tujuan Pembelajaran ............................................................................................ 7
Puji syukur kami panjatkan kepada Tuhan Yang Maha Esa atas tersusunnya buku
teks ini, dengan harapan dapat digunakan sebagai buku teks untuk siswa Sekolah
Menengah Kejuruan (SMK) Bidang Studi Keahlian Teknologi Dan Rekayasa, Teknik
Mekatronika.
Modul pembelajaran ini disusun berdasarkan tuntutan paradigma pengajaran
dan pembelajaran kurikulum 2013 yang diselaraskan berdasarkan pendekatan model
pembelajaran yang sesuai dengan kebutuhan belajar kurikulum abad 21, yaitu
peningkatan keterampilan berdasarkan tuntutan kebutuhan industri. Penyajian modul
pembelajaran ini disusun dengan tujuan agar supaya peserta didik dapat melakukan
proses pencarian pengetahuan berkenaan dengan materi pelajaran melalui berbagai
aktivitas proses sains sebagaimana dilakukan oleh para ilmuwan dalam melakukan
eksperimen ilmiah (penerapan scientifik), dengan demikian peserta didik diarahkan untuk
menemukan sendiri berbagai fakta, membangun konsep, dan paradigma baru secara
mandiri.
Kementerian Pendidikan dan Kebudayaan, Direktorat Pembinaan Sekolah
Menengah Kejuruan, dan Direktorat Jenderal Peningkatan Mutu Pendidik dan Tenaga
Kependidikan menyampaikan terima kasih, sekaligus saran kritik demi kesempurnaan
buku teks ini dan penghargaan kepada semua pihak yang telah berperan serta dalam
membantu terselesaikannya buku teks siswa jurusan teknik Mekatronida di tingkat
Sekolah Menengah Kejuruan (SMK).
Jerman, 1 April 2017
Penulis
KATA PENGANTAR PENULIS
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
iii
KATA PENGANTAR .................................................................................................................. ii
DAFTAR ISI ............................................................................................................................. iii
DAFTAR GAMBAR .................................................................................................................. vi
DAFTAR TABEL ........................................................................................................................ x
PETA KEDUDUKAN MODUL ................................................................................................... xi
GLOSARIUM ............................................................................................................................xii
PENDAHULUAN ....................................................................................................................... 1
A. STANDAR KOMPETENSI ...................................................................................... 1
B. DESKRIPSI MATERI PEMBELAJARAN ................................................................ 4
C. WAKTU ................................................................................................................... 4
D. PRASYARAT .......................................................................................................... 4
E. PETUNJUK PENGGUNAAN MODUL ..................................................................... 5
F. TUJUAN AKHIR ..................................................................................................... 5
G. CEK PENGUASAAN STANDAR KOMPETENSI ..................................................... 5
BAB II ........................................................................................................................................ 7
KEGIATAN PEMBELAJARAN .................................................................................................. 7
A. RENCANA BELAJAR SISWA ................................................................................. 7
B. KEGIATAN PEMBELAJARAN ................................................................................ 7
1. KEGIATAN PEMBELAJARAN 1 ............................................................................. 7
SISTEM PNEUMATIK ................................................................................................. 7
A. Tujuan Pembelajaran ............................................................................................ 7
DAFTAR ISI
KATA PENGANTAR KASUBDIT PROGRAM DAN EVALUASI..................................................... i
KATA PENGANTAR PENULIS...................................................................................................... ii
DAFTAR ISI.................................................................................................................................. iii
DAFTAR GAMBAR....................................................................................................................... vi
DAFTAR TABEL............................................................................................................................ x
PETA KEDUDUKAN MODUL........................................................................................................ xi
GLOSARIUM................................................................................................................................ xii
Puji syukur kami panjatkan kepada Tuhan Yang Maha Esa atas tersusunnya buku
teks ini, dengan harapan dapat digunakan sebagai buku teks untuk siswa Sekolah
Menengah Kejuruan (SMK) Bidang Studi Keahlian Teknologi Dan Rekayasa, Teknik
Mekatronika.
Modul pembelajaran ini disusun berdasarkan tuntutan paradigma pengajaran
dan pembelajaran kurikulum 2013 yang diselaraskan berdasarkan pendekatan model
pembelajaran yang sesuai dengan kebutuhan belajar kurikulum abad 21, yaitu
peningkatan keterampilan berdasarkan tuntutan kebutuhan industri. Penyajian modul
pembelajaran ini disusun dengan tujuan agar supaya peserta didik dapat melakukan
proses pencarian pengetahuan berkenaan dengan materi pelajaran melalui berbagai
aktivitas proses sains sebagaimana dilakukan oleh para ilmuwan dalam melakukan
eksperimen ilmiah (penerapan scientifik), dengan demikian peserta didik diarahkan untuk
menemukan sendiri berbagai fakta, membangun konsep, dan paradigma baru secara
mandiri.
Kementerian Pendidikan dan Kebudayaan, Direktorat Pembinaan Sekolah
Menengah Kejuruan, dan Direktorat Jenderal Peningkatan Mutu Pendidik dan Tenaga
Kependidikan menyampaikan terima kasih, sekaligus saran kritik demi kesempurnaan
buku teks ini dan penghargaan kepada semua pihak yang telah berperan serta dalam
membantu terselesaikannya buku teks siswa jurusan teknik Mekatronida di tingkat
Sekolah Menengah Kejuruan (SMK).
Jerman, 1 April 2017
Penulis
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
iv
D. Tugas ................................................................................................................... 59
E. Tes Formatif ........................................................................................................ 59
F. Jawaban Tes Formatif ........................................................................................ 60
G. Lembar Kerja ....................................................................................................... 60
3. KEGIATAN PEMBELAJAR AN 3 : ........................................................................ 65
PEMROGRAMAN LOGIKA DASAR PLC ....................................................................... 65
A. Tujuan .................................................................................................................. 65
B. Uraian materi ....................................................................................................... 65
1. Statement List (STL), ...................................................................................... 66
2. Ladder Diagram (LAD), ................................................................................... 66
3. Function Block Diagram (FBD),...................................................................... 66
4. S7-Graph atau Sequential Function Chart (SFC) .......................................... 67
5. Structured Control Language (SCL). ............................................................. 67
6. PC Adapter MPI .............................................................................................. 74
7. Pemrograman PLC dengan Step 7 ................................................................. 74
C. Rangkuman ......................................................................................................... 94
D. Tugas ................................................................................................................... 94
E. Tes Formatif ........................................................................................................ 94
F. Kunci Jawaban Tes Formatif ............................................................................. 95
G. Lembar Kerja ....................................................................................................... 96
BAB III ..................................................................................................................................... 99
EVALUASI ............................................................................................................................... 99
BAB IV .................................................................................................................................. 107
PENUTUP ............................................................................................................................. 107
DAFTAR PUSTAKA .............................................................................................................. 108
B. Uraian Materi ......................................................................................................... 7
1.1. Sistem pneumatik di dalam aliran ............................................................ 12
1.2. Standarisasi pneumatik circuit diagram .................................................. 17
1.3. Simbol-simbol katup pengarah dan cara penggambarannya ................. 17
1.4. Jenis-jenis penggerak katup pneumatik pada katup pengarah. ............. 20
1.5. Diagram Sirkuit........................................................................................... 23
1.6. Penerapan sistem Pneumatik ................................................................... 26
C. Rangkuman ......................................................................................................... 29
D. Tugas ................................................................................................................... 30
E. Tes Formatif ........................................................................................................ 30
F. Kunci Jawaban Tes Formatif ............................................................................. 32
G. Lembar kerja ........................................................................................................ 33
2. KEGIATAN PEMBELAJARAN 2 ........................................................................... 35
ELEKTROPNEUMATIK .................................................................................................. 35
A. Tujuan Pembelajaran .......................................................................................... 35
B. Uraian Materi ....................................................................................................... 35
2.1. Kontrol Pengendali .................................................................................... 35
2.2. Limit Switch ................................................................................................ 40
2.3. Sensor ......................................................................................................... 41
2.4. Relai ............................................................................................................ 44
2.5. Katup Beroperasi dengan Pneumatik ....................................................... 47
2.6. Standarisasi Electrical Circuit Diagram .................................................... 48
2.7. Diagram Sirkuit........................................................................................... 51
2.8. Positional Diagram .................................................................................... 53
2.9. Contoh Aplikasi Kontrol Elektropneumatik .............................................. 55
C. Rangkuman ......................................................................................................... 59
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
v
D. Tugas ................................................................................................................... 59
E. Tes Formatif ........................................................................................................ 59
F. Jawaban Tes Formatif ........................................................................................ 60
G. Lembar Kerja ....................................................................................................... 60
3. KEGIATAN PEMBELAJAR AN 3 : ........................................................................ 65
PEMROGRAMAN LOGIKA DASAR PLC ....................................................................... 65
A. Tujuan .................................................................................................................. 65
B. Uraian materi ....................................................................................................... 65
1. Statement List (STL), ...................................................................................... 66
2. Ladder Diagram (LAD), ................................................................................... 66
3. Function Block Diagram (FBD),...................................................................... 66
4. S7-Graph atau Sequential Function Chart (SFC) .......................................... 67
5. Structured Control Language (SCL). ............................................................. 67
6. PC Adapter MPI .............................................................................................. 74
7. Pemrograman PLC dengan Step 7 ................................................................. 74
C. Rangkuman ......................................................................................................... 94
D. Tugas ................................................................................................................... 94
E. Tes Formatif ........................................................................................................ 94
F. Kunci Jawaban Tes Formatif ............................................................................. 95
G. Lembar Kerja ....................................................................................................... 96
BAB III ..................................................................................................................................... 99
EVALUASI ............................................................................................................................... 99
BAB IV .................................................................................................................................. 107
PENUTUP ............................................................................................................................. 107
DAFTAR PUSTAKA .............................................................................................................. 108
B. Uraian Materi ......................................................................................................... 7
1.1. Sistem pneumatik di dalam aliran ............................................................ 12
1.2. Standarisasi pneumatik circuit diagram .................................................. 17
1.3. Simbol-simbol katup pengarah dan cara penggambarannya ................. 17
1.4. Jenis-jenis penggerak katup pneumatik pada katup pengarah. ............. 20
1.5. Diagram Sirkuit........................................................................................... 23
1.6. Penerapan sistem Pneumatik ................................................................... 26
C. Rangkuman ......................................................................................................... 29
D. Tugas ................................................................................................................... 30
E. Tes Formatif ........................................................................................................ 30
F. Kunci Jawaban Tes Formatif ............................................................................. 32
G. Lembar kerja ........................................................................................................ 33
2. KEGIATAN PEMBELAJARAN 2 ........................................................................... 35
ELEKTROPNEUMATIK .................................................................................................. 35
A. Tujuan Pembelajaran .......................................................................................... 35
B. Uraian Materi ....................................................................................................... 35
2.1. Kontrol Pengendali .................................................................................... 35
2.2. Limit Switch ................................................................................................ 40
2.3. Sensor ......................................................................................................... 41
2.4. Relai ............................................................................................................ 44
2.5. Katup Beroperasi dengan Pneumatik ....................................................... 47
2.6. Standarisasi Electrical Circuit Diagram .................................................... 48
2.7. Diagram Sirkuit........................................................................................... 51
2.8. Positional Diagram .................................................................................... 53
2.9. Contoh Aplikasi Kontrol Elektropneumatik .............................................. 55
C. Rangkuman ......................................................................................................... 59
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
vi
Gambar 31 skema sensor dengan reflektor ........................................................................ 44
Gambar 32 konstruksi relai ................................................................................................... 45
Gambar 33 identis relai ........................................................................................................ 46
Gambar 34 relai tunda waktu hidup ..................................................................................... 47
Gambar 35 Relai tunda waktu mati ...................................................................................... 47
Gambar 36 Katup dengan Pilot Solenoid ............................................................................. 48
Gambar 37 Simbol-simbol grafik untuk kontak: fungi dasar dan aktuasi tertunda .......... 49
Gambar 38 Simbol grafis untuk alat-alat yang dioperasikan manual ................................ 50
Gambar 39 Simbol – simbol grafis penggerak elektromekanik ......................................... 50
Gambar 40 Simbol Grafis untuk relai dan kontaktor ........................................................... 50
Gambar 41 Simbol-simbol grafis untuk sensor ................................................................... 51
Gambar 42 Susunan rangkaian Pneumatik ......................................................................... 52
Gambar 43 Susunan rangkaian elektrik ............................................................................... 52
Gambar 44 Switch NO dalam keadaan tersambung ........................................................... 53
Gambar 45 Positional diagram ............................................................................................. 54
Gambar 46 Diagram step pemindahan ................................................................................ 55
Gambar 47 Diagram Rangkaian Pneumatik dan Diagram Rangkaian Elektrik .................. 55
Gambar 48 Rangkaian yang mendeteksi akhir langkah maju dan langkah mundur. ....... 56
Gambar 49 Sket Posisi .......................................................................................................... 57
Gambar 50 Displacement step diagram .............................................................................. 57
Gambar 51 Diagram RANGKAIAN elektropneumatik dengan urutan gerak : A+, B+, A-, B-
................................................................................................................................................ 58
Gambar 52 Contoh Bahasa Pemrograman LAD .................................................................. 66
Gambar 53 Contoh Bahasa Pemrograman FBD .................................................................. 67
Gambar 54 Contoh Bahasa Pemrograman S7- Graph ........................................................ 67
Gambar 55 Contoh Bahasa Pemrograman SCL ................................................................. 68
Gambar 56 Modul PS-307-2A .............................................................................................. 69
Gambar 57 Modul CPU 313-1AD01-0AB0 ........................................................................... 70
Gambar 58. Blok Diagram Modul I/O SM 323 DI8/DO8x24 VDC ........................................ 72
Gambar 59 Antarmuka Masukan ......................................................................................... 73
Gambar 60 Antarmuka Keluaran ......................................................................................... 73
Gambar 61 Prosedur penggunaan Siemens Step 7 ............................................................ 74
Gambar 62 Simbol Icon Simatic Manager ........................................................................... 75
Gambar 1 Fenomena Gaya ................................................................................................... 10
Gambar 2 Memperlihatkan konfigurasi dasar sistem kontrol pnumatik. .......................... 10
Gambar 3 Urutan pneumatik element .................................................................................. 12
Gambar 4 silinder single acting dan simbolnya .................................................................. 14
Gambar 5 Control Single Acting Cylinder............................................................................. 15
Gambar 6 silinder doble acting dan simbolnya ................................................................... 16
Gambar 7 Control Single(a) dan doble acting (b) ............................................................... 16
Gambar 8 Cara Menggambar dan Membaca Katup Pneumatik ........................................ 18
Gambar 9 Penandaan dari Katup Pneumatik ...................................................................... 19
Gambar 10 Penomoran katup pneumatik ............................................................................ 19
Gambar 11 Katub 3/2 dengan Aktuasi Tombol Tekan, Normally Closed .......................... 20
Gambar 12 Katub 3/2 dengan aktuasi Tombol Tekan, Normally Open ............................. 20
Gambar 13 Katub 3/2 dengan aktuasi Sakelar Seleksi....................................................... 20
Gambar 14 Katub 3/2 dengan aktuasi Sakelar Limit roller, Normally Closed ................... 21
Gambar 15 Contoh Katup Pneumatik secara Operasional ................................................. 23
Gambar 16 Contoh sistem penandaan ................................................................................ 25
Gambar 17 Sirkuit Pneumatik pengendalian langsung ...................................................... 27
Gambar 18 Sirkuit Pneumatik pengendalian tidak langsung ............................................. 27
Gambar 19 Soal aplikasi pneumatik .................................................................................... 28
Gambar 20 Kontak sakelar dengan konfigurasi NC ............................................................ 36
Gambar 21 macam macam kontak ...................................................................................... 37
Gambar 22 Konfigurasi N/C ................................................................................................. 37
Gambar 23 konfigurasi N/O dan N/C .................................................................................. 38
Gambar 24 Jenis Saklar ........................................................................................................ 38
Gambar 25 Macam macam saklar ....................................................................................... 40
Gambar 26 Kontak limit switch ............................................................................................ 40
Gambar 27 konstruksi relai ................................................................................................... 41
Gambar 28 macam – macam sensor.................................................................................. 42
Gambar 29 Sensor reed switch ............................................................................................ 43
Gambar 30 skema sensor 1 arah ( one – way) .................................................................... 44
DAFTAR GAMBAR
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
vii
Gambar 31 skema sensor dengan reflektor ........................................................................ 44
Gambar 32 konstruksi relai ................................................................................................... 45
Gambar 33 identis relai ........................................................................................................ 46
Gambar 34 relai tunda waktu hidup ..................................................................................... 47
Gambar 35 Relai tunda waktu mati ...................................................................................... 47
Gambar 36 Katup dengan Pilot Solenoid ............................................................................. 48
Gambar 37 Simbol-simbol grafik untuk kontak: fungi dasar dan aktuasi tertunda .......... 49
Gambar 38 Simbol grafis untuk alat-alat yang dioperasikan manual ................................ 50
Gambar 39 Simbol – simbol grafis penggerak elektromekanik ......................................... 50
Gambar 40 Simbol Grafis untuk relai dan kontaktor ........................................................... 50
Gambar 41 Simbol-simbol grafis untuk sensor ................................................................... 51
Gambar 42 Susunan rangkaian Pneumatik ......................................................................... 52
Gambar 43 Susunan rangkaian elektrik ............................................................................... 52
Gambar 44 Switch NO dalam keadaan tersambung ........................................................... 53
Gambar 45 Positional diagram ............................................................................................. 54
Gambar 46 Diagram step pemindahan ................................................................................ 55
Gambar 47 Diagram Rangkaian Pneumatik dan Diagram Rangkaian Elektrik .................. 55
Gambar 48 Rangkaian yang mendeteksi akhir langkah maju dan langkah mundur. ....... 56
Gambar 49 Sket Posisi .......................................................................................................... 57
Gambar 50 Displacement step diagram .............................................................................. 57
Gambar 51 Diagram RANGKAIAN elektropneumatik dengan urutan gerak : A+, B+, A-, B-
................................................................................................................................................ 58
Gambar 52 Contoh Bahasa Pemrograman LAD .................................................................. 66
Gambar 53 Contoh Bahasa Pemrograman FBD .................................................................. 67
Gambar 54 Contoh Bahasa Pemrograman S7- Graph ........................................................ 67
Gambar 55 Contoh Bahasa Pemrograman SCL ................................................................. 68
Gambar 56 Modul PS-307-2A .............................................................................................. 69
Gambar 57 Modul CPU 313-1AD01-0AB0 ........................................................................... 70
Gambar 58. Blok Diagram Modul I/O SM 323 DI8/DO8x24 VDC ........................................ 72
Gambar 59 Antarmuka Masukan ......................................................................................... 73
Gambar 60 Antarmuka Keluaran ......................................................................................... 73
Gambar 61 Prosedur penggunaan Siemens Step 7 ............................................................ 74
Gambar 62 Simbol Icon Simatic Manager ........................................................................... 75
Gambar 1 Fenomena Gaya ................................................................................................... 10
Gambar 2 Memperlihatkan konfigurasi dasar sistem kontrol pnumatik. .......................... 10
Gambar 3 Urutan pneumatik element .................................................................................. 12
Gambar 4 silinder single acting dan simbolnya .................................................................. 14
Gambar 5 Control Single Acting Cylinder............................................................................. 15
Gambar 6 silinder doble acting dan simbolnya ................................................................... 16
Gambar 7 Control Single(a) dan doble acting (b) ............................................................... 16
Gambar 8 Cara Menggambar dan Membaca Katup Pneumatik ........................................ 18
Gambar 9 Penandaan dari Katup Pneumatik ...................................................................... 19
Gambar 10 Penomoran katup pneumatik ............................................................................ 19
Gambar 11 Katub 3/2 dengan Aktuasi Tombol Tekan, Normally Closed .......................... 20
Gambar 12 Katub 3/2 dengan aktuasi Tombol Tekan, Normally Open ............................. 20
Gambar 13 Katub 3/2 dengan aktuasi Sakelar Seleksi....................................................... 20
Gambar 14 Katub 3/2 dengan aktuasi Sakelar Limit roller, Normally Closed ................... 21
Gambar 15 Contoh Katup Pneumatik secara Operasional ................................................. 23
Gambar 16 Contoh sistem penandaan ................................................................................ 25
Gambar 17 Sirkuit Pneumatik pengendalian langsung ...................................................... 27
Gambar 18 Sirkuit Pneumatik pengendalian tidak langsung ............................................. 27
Gambar 19 Soal aplikasi pneumatik .................................................................................... 28
Gambar 20 Kontak sakelar dengan konfigurasi NC ............................................................ 36
Gambar 21 macam macam kontak ...................................................................................... 37
Gambar 22 Konfigurasi N/C ................................................................................................. 37
Gambar 23 konfigurasi N/O dan N/C .................................................................................. 38
Gambar 24 Jenis Saklar ........................................................................................................ 38
Gambar 25 Macam macam saklar ....................................................................................... 40
Gambar 26 Kontak limit switch ............................................................................................ 40
Gambar 27 konstruksi relai ................................................................................................... 41
Gambar 28 macam – macam sensor.................................................................................. 42
Gambar 29 Sensor reed switch ............................................................................................ 43
Gambar 30 skema sensor 1 arah ( one – way) .................................................................... 44
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
viii
Gambar 96. Set Komunikasi PLC ......................................................................................... 90
Gambar 97. Set PC Adapter .................................................................................................. 91
Gambar 98. Properti PC Adapter .......................................................................................... 91
Gambar 99. Menu Download ................................................................................................ 92
Gambar 100. Icon Simulasi .................................................................................................. 92
Gambar 101. Icon monitor .................................................................................................... 93
Gambar 102. PLCSIM mode RUN ......................................................................................... 93
Gambar 103. Simulasi PLC ................................................................................................... 93
Gambar 63 Tampilan New Project Wizard ........................................................................... 75
Gambar 64 Tampilan pemilihan hardware PLC .................................................................. 76
Gambar 65 Tampilan pemilihan block program ................................................................. 76
Gambar 66 Tampilan nama project ..................................................................................... 77
Gambar 67 Tampilan project Step 7 .................................................................................... 77
Gambar 68 Halaman untuk menulis program “ Ladder” .................................................... 78
Gambar 69. icon “Symbol” ................................................................................................... 78
Gambar 70. Tampilan Symbol Editor ................................................................................... 79
Gambar 71 Deklarasi alamat input dan output ................................................................... 79
Gambar 72. Memilih bahasa Ladder .................................................................................... 79
Gambar 73 Kontak normally open ........................................................................................ 80
Gambar 74. Simbol Coil......................................................................................................... 80
Gambar 75. Program ladder logika AND .............................................................................. 80
Gambar 76. Ladder 1 NO dan 1 coil...................................................................................... 80
Gambar 77. Parallel ladder branch ....................................................................................... 80
Gambar 78. Parallel ladder close branch ............................................................................. 81
Gambar 79. Parallel ladder.................................................................................................... 81
Gambar 80. Simbol S-ODT .................................................................................................... 81
Gambar 81. Pemrograman Timer On Delay ......................................................................... 82
Gambar 82. Symbol S-OffDT ................................................................................................. 83
Gambar 83. Pemrograman Timer Off Delay ......................................................................... 83
Gambar 84. Simbol Counter UP “ S-CU) ............................................................................... 84
Gambar 85. Counter up ......................................................................................................... 84
Gambar 86. Simbol Counter Down ....................................................................................... 85
Gambar 87. Program Counter Down .................................................................................... 86
Gambar 88. Rangkaian pengunci dengan dominan set ...................................................... 87
Gambar 89. Rangkaian pengunci dominan reset ................................................................ 87
Gambar 90. Rangkaian memori dengan katup solenoid ganda ......................................... 87
Gambar 91. Langkah untuk memanggil fungsi set reset .................................................... 88
Gambar 92. Lader diagram fungsi set-reset ........................................................................ 88
Gambar 93. Konfigurasi Hardware PLC ............................................................................... 89
Gambar 94. Saklar On Off ..................................................................................................... 89
Gambar 95. Switch Mode PLC .............................................................................................. 90
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
ix
Gambar 96. Set Komunikasi PLC ......................................................................................... 90
Gambar 97. Set PC Adapter .................................................................................................. 91
Gambar 98. Properti PC Adapter .......................................................................................... 91
Gambar 99. Menu Download ................................................................................................ 92
Gambar 100. Icon Simulasi .................................................................................................. 92
Gambar 101. Icon monitor .................................................................................................... 93
Gambar 102. PLCSIM mode RUN ......................................................................................... 93
Gambar 103. Simulasi PLC ................................................................................................... 93
Gambar 63 Tampilan New Project Wizard ........................................................................... 75
Gambar 64 Tampilan pemilihan hardware PLC .................................................................. 76
Gambar 65 Tampilan pemilihan block program ................................................................. 76
Gambar 66 Tampilan nama project ..................................................................................... 77
Gambar 67 Tampilan project Step 7 .................................................................................... 77
Gambar 68 Halaman untuk menulis program “ Ladder” .................................................... 78
Gambar 69. icon “Symbol” ................................................................................................... 78
Gambar 70. Tampilan Symbol Editor ................................................................................... 79
Gambar 71 Deklarasi alamat input dan output ................................................................... 79
Gambar 72. Memilih bahasa Ladder .................................................................................... 79
Gambar 73 Kontak normally open ........................................................................................ 80
Gambar 74. Simbol Coil......................................................................................................... 80
Gambar 75. Program ladder logika AND .............................................................................. 80
Gambar 76. Ladder 1 NO dan 1 coil...................................................................................... 80
Gambar 77. Parallel ladder branch ....................................................................................... 80
Gambar 78. Parallel ladder close branch ............................................................................. 81
Gambar 79. Parallel ladder.................................................................................................... 81
Gambar 80. Simbol S-ODT .................................................................................................... 81
Gambar 81. Pemrograman Timer On Delay ......................................................................... 82
Gambar 82. Symbol S-OffDT ................................................................................................. 83
Gambar 83. Pemrograman Timer Off Delay ......................................................................... 83
Gambar 84. Simbol Counter UP “ S-CU) ............................................................................... 84
Gambar 85. Counter up ......................................................................................................... 84
Gambar 86. Simbol Counter Down ....................................................................................... 85
Gambar 87. Program Counter Down .................................................................................... 86
Gambar 88. Rangkaian pengunci dengan dominan set ...................................................... 87
Gambar 89. Rangkaian pengunci dominan reset ................................................................ 87
Gambar 90. Rangkaian memori dengan katup solenoid ganda ......................................... 87
Gambar 91. Langkah untuk memanggil fungsi set reset .................................................... 88
Gambar 92. Lader diagram fungsi set-reset ........................................................................ 88
Gambar 93. Konfigurasi Hardware PLC ............................................................................... 89
Gambar 94. Saklar On Off ..................................................................................................... 89
Gambar 95. Switch Mode PLC .............................................................................................. 90
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
x
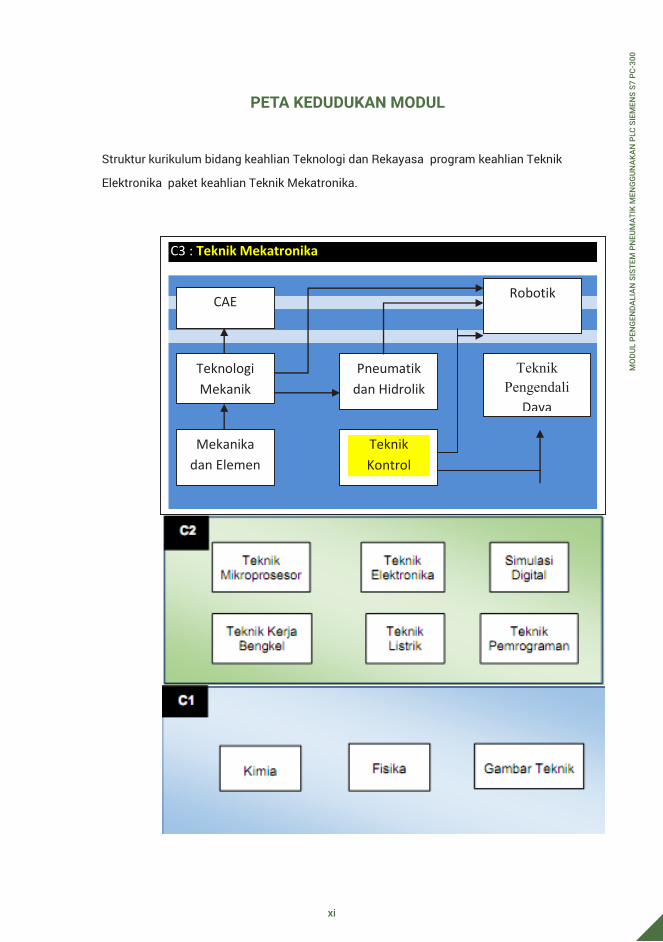
Struktur kurikulum bidang keahlian Teknologi dan Rekayasa program keahlian Teknik
Elektronika paket keahlian Teknik Mekatronika.
C3 : Teknik Mekatronika
CAE
Teknologi Mekanik
Mekanika dan Elemen
mesin
Teknik Kontrol
Pneumatik dan Hidrolik
Robotik
Teknik Pengendali
Daya
Tabel 1 Jenis komponen Pneumatik .................................................................................... 13
Tabel 2 Tanda-tanda dan Penomoran pada Lubang-lubang Katup Pneumatik ................ 19
Tabel 3 : Symbol jenis pengaktian........................................................................................ 21
Tabel 4. Tampilan LED Status dan Kesalahan CPU-313-1AD01-0AB0............................... 71
Tabel 5. Mode Selector Switch CPU-313-1AD01-0AB0 ....................................................... 71
Tabel 6. Parameter S-ODT ..................................................................................................... 82
Tabel 7. Parameter S-OffDT .................................................................................................. 83
Tabel 8. Parameter Counter UP ............................................................................................ 84
Tabel 9. Parameter Counter Down ....................................................................................... 85
DAFTAR TABEL
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
xi
Struktur kurikulum bidang keahlian Teknologi dan Rekayasa program keahlian Teknik
Elektronika paket keahlian Teknik Mekatronika.
C3 : Teknik Mekatronika
CAE
Teknologi Mekanik
Mekanika dan Elemen
mesin
Teknik Kontrol
Pneumatik dan Hidrolik
Robotik
Teknik Pengendali
Daya
PETA KEDUDUKAN MODUL
Tabel 1 Jenis komponen Pneumatik .................................................................................... 13
Tabel 2 Tanda-tanda dan Penomoran pada Lubang-lubang Katup Pneumatik ................ 19
Tabel 3 : Symbol jenis pengaktian........................................................................................ 21
Tabel 4. Tampilan LED Status dan Kesalahan CPU-313-1AD01-0AB0............................... 71
Tabel 5. Mode Selector Switch CPU-313-1AD01-0AB0 ....................................................... 71
Tabel 6. Parameter S-ODT ..................................................................................................... 82
Tabel 7. Parameter S-OffDT .................................................................................................. 83
Tabel 8. Parameter Counter UP ............................................................................................ 84
Tabel 9. Parameter Counter Down ....................................................................................... 85
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
xii
Jumlah yang terus menerus berubah. Yaitu nilai yang sulit
ditangani dengan angka (nilai digital), misalnya waktu, suhu,
tekanan, voltase, arus, jumlah aliran, dan sebagainya. Karena
nilai analog tidak ditangani secara langsung di CPU PLC,
maka pengoperasian dilakukan dengan mengkonversi ke
nilai digital. Hal ini disebut dengan konversi A/D
Assembler Software program komputer yang mengubah bahasa
pemrograman assembly kedalam bahasa mesin (machine
code)
Batch Jumlah yang diproses dalam sekali operasi dalam proses
(yaitu proses batch) yang tidak dapat dihentikan di tengah
jalan setelah material dimasukan. Seperti proses penguatan
(annealing) dan polimerisasi
Bit Singkatan dari binary digit. 1bit adalah satuan minimum
informasi untuk menampilkan dua kondisi, 0 (OFF) dan 1
(ON). Kontak dan koil adalah 1 bit, sehingga disebut
perangkat bit
Sebuah FB dirancang untuk mengkonversi blok sirkuit, yang
digunakan berulang kali dalam urutan program, menjadi
komponen yang akan digunakan dalam program sekuens
Satuan jumlah informasi. 1 byte setara dengan 8 bit.
Changer Bagian dari stasiun distribusi yang berfungsi untuk
memindahkan benda kerja dari tempat magazine ke stasiun
lainnya
CPU Bagian sub-sistem yang bertugas mengontrol dan
mensupervisi semua operasi PLC. Sebuah komunikasi internal
atau “Bus System” membawa informasi dari dan ke CPU, I/O,
dan memori
Sekumpulan data yang dimiliki bersama oleh beberapa
aplikasi perangkat lunak atau pengguna. Ada kalanya
pengertian ini mencakup juga sistem manajemennya.
Actuator Suatu alat yang dapat merubah besaran/kuantitas listrik
menjadi kuantitas fisik seperti contohnya : motor, solenoid,
lampu, katup, dsb
Akumulator - Salah satu jenis register data. Pada umumnya,
meskipun pemrogram tidak perlu sadar karena CPU PLC
menggunakan akumulator berdasarkan preferensi,
namun ia harus sadar dengan perintah tertentu
- Jika terdapat 2 buah akumulator, A0 dan A1, dan data
yang terprogram 16 bit, maka data akan masuk ke A0,
dan jika data yang terprogram adalah 32 bit, kata paling
bawah akan masuk ke A0 dan kata paling atas akan
masuk ke A1
- Ketika perintah yang menggunakan akumulator
dijalankan beberapa kali dalam program, jika data
tersebut berturut-turut tidak terkirim ke register data,
maka akumulator akan menulis ulang secara
preferensial menggunakan CPU PLC. Untuk itu pada
saat akan melaksanakan perintah selanjutnya harus
berhati-hati supaya tidak terlanjur tertulis ulang.
Address - Alamat di memori. Memori memiliki alamat, dan menulis
serta membaca data dilakukan dengan menunjuk
alamat tersebut
- Nilai numerik untuk menunjukkan posisi target pada
saat pemosisian. Satuan diatur dalam mm, inci, sudut,
atau jumlah pulsa
Prosedur pemrosesan untuk mencapai tujuan tertentu dari
pemakaian komputer. Sesuatu yang menguraikan algoritma
secara nyata menggunakan bahasa pemrograman disebut
program
GLOSARIUM
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
xiii
Jumlah yang terus menerus berubah. Yaitu nilai yang sulit
ditangani dengan angka (nilai digital), misalnya waktu, suhu,
tekanan, voltase, arus, jumlah aliran, dan sebagainya. Karena
nilai analog tidak ditangani secara langsung di CPU PLC,
maka pengoperasian dilakukan dengan mengkonversi ke
nilai digital. Hal ini disebut dengan konversi A/D
Assembler Software program komputer yang mengubah bahasa
pemrograman assembly kedalam bahasa mesin (machine
code)
Batch Jumlah yang diproses dalam sekali operasi dalam proses
(yaitu proses batch) yang tidak dapat dihentikan di tengah
jalan setelah material dimasukan. Seperti proses penguatan
(annealing) dan polimerisasi
Bit Singkatan dari binary digit. 1bit adalah satuan minimum
informasi untuk menampilkan dua kondisi, 0 (OFF) dan 1
(ON). Kontak dan koil adalah 1 bit, sehingga disebut
perangkat bit
Sebuah FB dirancang untuk mengkonversi blok sirkuit, yang
digunakan berulang kali dalam urutan program, menjadi
komponen yang akan digunakan dalam program sekuens
Satuan jumlah informasi. 1 byte setara dengan 8 bit.
Changer Bagian dari stasiun distribusi yang berfungsi untuk
memindahkan benda kerja dari tempat magazine ke stasiun
lainnya
CPU Bagian sub-sistem yang bertugas mengontrol dan
mensupervisi semua operasi PLC. Sebuah komunikasi internal
atau “Bus System” membawa informasi dari dan ke CPU, I/O,
dan memori
Sekumpulan data yang dimiliki bersama oleh beberapa
aplikasi perangkat lunak atau pengguna. Ada kalanya
pengertian ini mencakup juga sistem manajemennya.
Actuator Suatu alat yang dapat merubah besaran/kuantitas listrik
menjadi kuantitas fisik seperti contohnya : motor, solenoid,
lampu, katup, dsb
Akumulator - Salah satu jenis register data. Pada umumnya,
meskipun pemrogram tidak perlu sadar karena CPU PLC
menggunakan akumulator berdasarkan preferensi,
namun ia harus sadar dengan perintah tertentu
- Jika terdapat 2 buah akumulator, A0 dan A1, dan data
yang terprogram 16 bit, maka data akan masuk ke A0,
dan jika data yang terprogram adalah 32 bit, kata paling
bawah akan masuk ke A0 dan kata paling atas akan
masuk ke A1
- Ketika perintah yang menggunakan akumulator
dijalankan beberapa kali dalam program, jika data
tersebut berturut-turut tidak terkirim ke register data,
maka akumulator akan menulis ulang secara
preferensial menggunakan CPU PLC. Untuk itu pada
saat akan melaksanakan perintah selanjutnya harus
berhati-hati supaya tidak terlanjur tertulis ulang.
Address - Alamat di memori. Memori memiliki alamat, dan menulis
serta membaca data dilakukan dengan menunjuk
alamat tersebut
- Nilai numerik untuk menunjukkan posisi target pada
saat pemosisian. Satuan diatur dalam mm, inci, sudut,
atau jumlah pulsa
Prosedur pemrosesan untuk mencapai tujuan tertentu dari
pemakaian komputer. Sesuatu yang menguraikan algoritma
secara nyata menggunakan bahasa pemrograman disebut
program
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
xiv
Memori yang menyimpan program dan parameter yang
diperlukan dalam pengolahan modul CPU
Monitor online Membaca dan memonitor status pengoperasian serta konten
perangkat pada CPU PLC yang sedang beroperasi dengan
menghubungkan CPU PLC dan perangkat periferi
Modular Production
System ( MPS)
sebuah unit stasiun yang terdiri dari beberapa actuator seperti
silinder, motor atau suction cup yang dibangkitkan oleh
vacuum generator, lengkap dengan komponen kontrolnya
seperti tombol tekan, sensorsensor dan kontrolernya
Pemrograman
Offline
menulis dan menyimpan program di dalam komputer tanpa
komputer (programming terminal) dihubungkan ke PLC
Pemrograman
Online
Membuat program atau memasukan logika ladder dalam alat
pemrogram (programming terminal) terhubung dengan PLC
Tranduser Suatu alat yang dapat merubah kuantitas fisik menjadi
sinyal listrik. Beberapa contoh dari tranducer diantaranya
dapat berupa : tombol tekan, sakelar batas, termostat,
straingages, dsb. Transducer ini mengirimkan informasi
mengenai kuantitas yang diukur.
Peralatan pneumatic yang terdiri dari filter, pengatur tekanan,
dan pelumas
Vakum udara yang mempunyai tekanan di bawah atmosfir
Electrically Erasable Programmable Read Only Memory
(EEPROM, E2ROM), Salah satu jenis memori hanya baca.
Penulisan dapat dilakukan dengan menggunakan tegangan.
Memori tidak akan terhapus meskipun listrik padam.
Bentuk luarnya sama dengan IC-RAM
High Level
Language
Bahasa pemrograman yang mudah dipahami dan digunakan
oleh pemakai. Adapun bentuknya berupa kata-kata atau
grup kata-kata dan atau berupa gambar diagram, yang pada
umumnya ditulis dalam bahasa inggris dan selanjutnya
perintah (kata-kata atau gambar diagram) ini diubah kedalam
bahasa mesin, yang menjadikan perintah ini dapat dieksekusi
oleh CPU
Interlock persyaratan untuk mengeblok operasi mesin yang sedang
berjalan agar tidak berpindah ke operasi berikutnya hingga
operasi yang sedang berjalan selesai, Interlock digunakan
untuk mencegah mesin rusak
Operasi untuk menggerakkan benda kerja ke posisi yang
diinginkan menggunakan sinyal dari eksternal, Pada modul
pemosisian, pengoperasian JOG dapat dilakukan dengan
memasukkan parameter dan kecepatan JOG. Akan tetapi,
pada kondisi ON dalam jangka waktu lama, JOG akan
melampaui batas langkah (nilai batas atas atau nilai batas
bawah), dan akan berhenti
Modul input analog Mengubah sinyal analog ke dalam bentuk sinyal digital,
dengan cara mengisolasi sinyal input analog yang dari luar
prosesor dan mengubahnya kedalam bentuk sinyal digital
dengan level yang sesuai, sehingga perubahan sinyal
kompatibel dengan bus data PLC
Modul output
analog
mengubah sinyal digital yang berasal dari prosesor ke dalam
bentuk sinyal analog yang terisolasi, yang dapat dipakai untuk
menggerakan (men-drive) peralatan output

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
xv
Memori yang menyimpan program dan parameter yang
diperlukan dalam pengolahan modul CPU
Monitor online Membaca dan memonitor status pengoperasian serta konten
perangkat pada CPU PLC yang sedang beroperasi dengan
menghubungkan CPU PLC dan perangkat periferi
Modular Production
System ( MPS)
sebuah unit stasiun yang terdiri dari beberapa actuator seperti
silinder, motor atau suction cup yang dibangkitkan oleh
vacuum generator, lengkap dengan komponen kontrolnya
seperti tombol tekan, sensorsensor dan kontrolernya
Pemrograman
Offline
menulis dan menyimpan program di dalam komputer tanpa
komputer (programming terminal) dihubungkan ke PLC
Pemrograman
Online
Membuat program atau memasukan logika ladder dalam alat
pemrogram (programming terminal) terhubung dengan PLC
Tranduser Suatu alat yang dapat merubah kuantitas fisik menjadi
sinyal listrik. Beberapa contoh dari tranducer diantaranya
dapat berupa : tombol tekan, sakelar batas, termostat,
straingages, dsb. Transducer ini mengirimkan informasi
mengenai kuantitas yang diukur.
Peralatan pneumatic yang terdiri dari filter, pengatur tekanan,
dan pelumas
Vakum udara yang mempunyai tekanan di bawah atmosfir
Electrically Erasable Programmable Read Only Memory
(EEPROM, E2ROM), Salah satu jenis memori hanya baca.
Penulisan dapat dilakukan dengan menggunakan tegangan.
Memori tidak akan terhapus meskipun listrik padam.
Bentuk luarnya sama dengan IC-RAM
High Level
Language
Bahasa pemrograman yang mudah dipahami dan digunakan
oleh pemakai. Adapun bentuknya berupa kata-kata atau
grup kata-kata dan atau berupa gambar diagram, yang pada
umumnya ditulis dalam bahasa inggris dan selanjutnya
perintah (kata-kata atau gambar diagram) ini diubah kedalam
bahasa mesin, yang menjadikan perintah ini dapat dieksekusi
oleh CPU
Interlock persyaratan untuk mengeblok operasi mesin yang sedang
berjalan agar tidak berpindah ke operasi berikutnya hingga
operasi yang sedang berjalan selesai, Interlock digunakan
untuk mencegah mesin rusak
Operasi untuk menggerakkan benda kerja ke posisi yang
diinginkan menggunakan sinyal dari eksternal, Pada modul
pemosisian, pengoperasian JOG dapat dilakukan dengan
memasukkan parameter dan kecepatan JOG. Akan tetapi,
pada kondisi ON dalam jangka waktu lama, JOG akan
melampaui batas langkah (nilai batas atas atau nilai batas
bawah), dan akan berhenti
Modul input analog Mengubah sinyal analog ke dalam bentuk sinyal digital,
dengan cara mengisolasi sinyal input analog yang dari luar
prosesor dan mengubahnya kedalam bentuk sinyal digital
dengan level yang sesuai, sehingga perubahan sinyal
kompatibel dengan bus data PLC
Modul output
analog
mengubah sinyal digital yang berasal dari prosesor ke dalam
bentuk sinyal analog yang terisolasi, yang dapat dipakai untuk
menggerakan (men-drive) peralatan output
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
xvi
Berikut ini adalah standar kompetensi siswa paket keahlian Teknik Mekatronika
pada mata pelajaran Elektropneumatik dan Robotika.
Kompetensi Inti 1 dan 2 memuat Tentang :
KI 1. Menghayati dan mengamalkan ajaran agama yang dianutnya
KI 2. Menghayati dan mengamalkan perilaku jujur, disiplin, tanggung jawab, peduli
(gotong royong, kerjasama, toleran, damai), santun, responsif dan proaktif
dan menunjukkan sikap sebagai bagian dari solusi atas berbagai
permasalahan dalam berinteraksi secara efektif dengan lingkungan sosial
dan alam serta dalam menempatkan diri sebagai cerminan bangsa dalam
pergaulan dunia
Sedangakan KI 3 dan KI 4 untuk pengetahuan dan ketrampilan dijabarkan beserta
Kompetensi Dasarnya seperti di bawah ini:
KI 3. Memahami, menerapkan
menganalisis dan mengevaluasi
pengetahuan faktual, konseptual,
prosedural dan metakognitif
dalam ilmu pengetahuan,
teknologi, seni, budaya, dan
humaniora dengan wawasan
kemanusiaan, kebangsaan,
kenegaraan, dan peradaban
terkait penyebab fenomena dan
kejadian dalam bidang kerja yang
spesifik untuk memecahkan
masalah
3.1 Memahami beberapa macam robot
yang diam ditempat dan robot yang
berjalan serta konstruksinya
3.2 Menjelaskan komponen-komponen
utama pada robot
3.3 Membaca data teknik komponen-
komponen utama pada robot
3.4 Memahami diagram rangkaian robot
3.5 Menjelaskan proses komisioning pada
robot
3.6 Menjelaskan peralatan kerja dan robot
yang akan dijalankan
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
1
Berikut ini adalah standar kompetensi siswa paket keahlian Teknik Mekatronika
pada mata pelajaran Elektropneumatik dan Robotika.
Kompetensi Inti 1 dan 2 memuat Tentang :
KI 1. Menghayati dan mengamalkan ajaran agama yang dianutnya
KI 2. Menghayati dan mengamalkan perilaku jujur, disiplin, tanggung jawab, peduli
(gotong royong, kerjasama, toleran, damai), santun, responsif dan proaktif
dan menunjukkan sikap sebagai bagian dari solusi atas berbagai
permasalahan dalam berinteraksi secara efektif dengan lingkungan sosial
dan alam serta dalam menempatkan diri sebagai cerminan bangsa dalam
pergaulan dunia
Sedangakan KI 3 dan KI 4 untuk pengetahuan dan ketrampilan dijabarkan beserta
Kompetensi Dasarnya seperti di bawah ini:
KI 3. Memahami, menerapkan
menganalisis dan mengevaluasi
pengetahuan faktual, konseptual,
prosedural dan metakognitif
dalam ilmu pengetahuan,
teknologi, seni, budaya, dan
humaniora dengan wawasan
kemanusiaan, kebangsaan,
kenegaraan, dan peradaban
terkait penyebab fenomena dan
kejadian dalam bidang kerja yang
spesifik untuk memecahkan
masalah
3.1 Memahami beberapa macam robot
yang diam ditempat dan robot yang
berjalan serta konstruksinya
3.2 Menjelaskan komponen-komponen
utama pada robot
3.3 Membaca data teknik komponen-
komponen utama pada robot
3.4 Memahami diagram rangkaian robot
3.5 Menjelaskan proses komisioning pada
robot
3.6 Menjelaskan peralatan kerja dan robot
yang akan dijalankan
BAB IPENDAHULUAN
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
2
melaksanakan tugas spesifik di
bawah pengawasan langsung
4.3 Memilih komponen-komponen yang
layak untuk digunakan pada robot
4.4 Membaca dan menggambar diagram
rangkaian robot.
4.5 Melakukan komisioning pada robot
4.6 Menyiapkan peralatan kerja dan robot
yang akan dioperasikan
4.7 Melakukan monitoring terhadap
komponen mesin, sambungan kabel,
alamat I/O kendali elektronik dan
pasangan mekanik
4.8 Menjalankan mesin sesuai prosedur dan
melakukan tindakan pengamanan jika
terjadi kegagalan operasi
4.9 Menggunakan peralatan kerja untuk
memasang komponen-komponen pada
robot
4.10 Memasang komponen sesuai prosedur
dan mengujinya setelah selesai
4.11 Melakukan penggantian komponen yang
rusak sesuai prosedur dengan
menggunakan peralatan kerja yang
sesuai
4.12 Menyiapkan peralatan-peralatan yang
digunakan
4.13 Menulis program di Personal Computer
(PC)/laptop/peralatan pemrograman
4.14 Memindah program dari PC ke peralatan
kontrol elektronik
4.15 Menguji robot dengan peralatan kontrol
elektronik
3.7 Menyebutkan macam-macam
pemeriksaan yang dilakukan sebelum
menjalankan robot
3.8 Memahami urutan pengoperasian suatu
robot
3.9 Menjelaskan peralatan kerja dan
komponen yang digunakan
3.10 Memahami cara pemasangan
komponen-komponen sesuai manual
instuksinya
3.11 Memahami cara penggantian komponen
yang rusak pada robot dengan
menggunakan peralatan kerja yang
sesuai
3.12 Memilih software kontrol yang sesuai
dengan program robot
3.13 Memahami bahasa pemrograman yang
digunakan
3.14 Memahami langkah-langkah
pemindahan program dari komputer/
peralatan pemrograman ke robot
3.15 Memahami cara pengujian program
pada robot
KI 4. Mengolah, menalar, menyaji dan
mencipta dalam ranah konkret
dan ranah abstrak terkait dengan
pengembangan dari yang
dipelajarinya di sekolah secara
mandiri,dan mampu
4.1 Menunjukkan beberapa macam robot
dan bagian-bagiannya
4.2 Melakukan pemeriksaan fungsi
komponen-komponen yang digunakan
pada robot
4.3 Memilih komponen-komponen yang
layak untuk digunakan pada robot
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
3
melaksanakan tugas spesifik di
bawah pengawasan langsung
4.3 Memilih komponen-komponen yang
layak untuk digunakan pada robot
4.4 Membaca dan menggambar diagram
rangkaian robot.
4.5 Melakukan komisioning pada robot
4.6 Menyiapkan peralatan kerja dan robot
yang akan dioperasikan
4.7 Melakukan monitoring terhadap
komponen mesin, sambungan kabel,
alamat I/O kendali elektronik dan
pasangan mekanik
4.8 Menjalankan mesin sesuai prosedur dan
melakukan tindakan pengamanan jika
terjadi kegagalan operasi
4.9 Menggunakan peralatan kerja untuk
memasang komponen-komponen pada
robot
4.10 Memasang komponen sesuai prosedur
dan mengujinya setelah selesai
4.11 Melakukan penggantian komponen yang
rusak sesuai prosedur dengan
menggunakan peralatan kerja yang
sesuai
4.12 Menyiapkan peralatan-peralatan yang
digunakan
4.13 Menulis program di Personal Computer
(PC)/laptop/peralatan pemrograman
4.14 Memindah program dari PC ke peralatan
kontrol elektronik
4.15 Menguji robot dengan peralatan kontrol
elektronik
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
4
Kemajuan ilmu pengetahuan dan teknologi dari masa ke masa berkembang cepat
terutama dibidang mekatronika. Perkembangan ini tampak jelas di industri, dimana
sebelumnya banyak pekerjaan menggunakan tangan manusia, kemudian beralih
menggunakan mesin, berikutnya dengan electro-mechanic (semi otomatis) dan
sekarang sudah menggunakan robotic (full automatic) seperti penggunaan Flexible
Manufacturing Sistems (FMS) dan Computerized Integrated Manufacture (CIM) dan
sebagainya.
Kendali elektropneumatik berbasis PLC merupakan peralatan atau komponen yang
mempunyai peranan penting dalam sebuah sistem pengaturan otomatis. Ketepatan
dan kesesuaian dalam memilih dan membuat program pada PLC akan sangat
menentukan kinerja dari sistem pengaturan secara otomatis.
Pada buku siswa ini baru dibahas tentang prinsip kerja rangkaian elektropneumatik,
plc dan kendali elektropneumatik berbasis plc, dimana pembahasan buku mencakup
dari symbol, karakteristik hingga aplikasi. Dengan mempelajari kendali
elektropneumatik diharapkan siswa dapat memahami dan menjelaskan cara kerja
suatu mesin sesuai fungsinya sebagai pengontrol atau otak dari suatu mesin yg
otomatis pada industri dan sebagainya.
Alokasi waktu untuk mempelajari modul ini di petakan menjadi berikut :
Kegiatan Belajar 1 : sistem pneumatik 12 jam pelajaran
Kegiatan Belajar 2 : Elektropneumatik 12 jam pelajaran
Kegiatan Belajar 3 : PLC (Programable Logic Control) 24 jam pelajaran
Total waktu yang dibutuhkan adalah 48 jam pelajaran
Untuk dapat mengikuti modul ini, peserta didik harus sudah menguasai materi Dasar
dan Pengukuran Listrik1 dan 2, Mikroprosesor, Teknik pemrograman dan Gerbang
Logika. Materi ini disampaikan pada kelas XI semester 2.
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
5
Modul ini disusun dengan memberikan penjelasan tentang konsep pengerjaan di
dunia usaha dan dunia industri ( DUDI ) seperti pneumatik, elektropneumatik atau
peralatan otomatis lainnya dengan beberapa symbol, karakteristik dan contoh
aplikasi sederhana yang berkaitan dengan dunia teknik pada umumnya dan
mekatronika pada khususnya. Untuk memungkinkan siswa belajar sendiri secara
tuntas , maka perlu diketahui bahwa isi buku ini pada setiap kegiatan belajar
umumnya terdiri atas, uraian materi, contoh-contoh aplikasi, tugas dan tes formatif
serta lembar kerja, sehingga diharapkan siswa dapat belajar mandiri (individual
learning) dan mastery learning (belajar tuntas) dapat tercapai.
Tujuan akhir yang hendak dicapai adalah agar siswa mampu:
Mengenal jenis dan simbol dari macam -macam komponen pada
Pneumatik, elektropneumatik dan plc .
Menjelaskan fungsi.macam - macam komponen pada pneumatik,
elektropneumatik dan plc .
Memahami konsep cara kerja .macam - macam komponen pada
Pneumatik, elektropneumatik dan plc .
Mampu membuat rangkaian aplikasi sederhana yang menggunakan
aplikasi FluidSim dan Siemens S7-300.
Mampu melakukan commisioning pada sistem kendali PLC secara
keseluruhan.
1. Apakah yang dimaksud dengan sistem pneumatik?
2. Sebutkan macam – macam komponen pneumatik!
3. Apakah yang dimaksud dengan sistem elektropneumatik?
4. Apakah yang dimaksud dengan PLC?
5. Sebutkan macam- macam komponen elektropneumatik!
Kemajuan ilmu pengetahuan dan teknologi dari masa ke masa berkembang cepat
terutama dibidang mekatronika. Perkembangan ini tampak jelas di industri, dimana
sebelumnya banyak pekerjaan menggunakan tangan manusia, kemudian beralih
menggunakan mesin, berikutnya dengan electro-mechanic (semi otomatis) dan
sekarang sudah menggunakan robotic (full automatic) seperti penggunaan Flexible
Manufacturing Sistems (FMS) dan Computerized Integrated Manufacture (CIM) dan
sebagainya.
Kendali elektropneumatik berbasis PLC merupakan peralatan atau komponen yang
mempunyai peranan penting dalam sebuah sistem pengaturan otomatis. Ketepatan
dan kesesuaian dalam memilih dan membuat program pada PLC akan sangat
menentukan kinerja dari sistem pengaturan secara otomatis.
Pada buku siswa ini baru dibahas tentang prinsip kerja rangkaian elektropneumatik,
plc dan kendali elektropneumatik berbasis plc, dimana pembahasan buku mencakup
dari symbol, karakteristik hingga aplikasi. Dengan mempelajari kendali
elektropneumatik diharapkan siswa dapat memahami dan menjelaskan cara kerja
suatu mesin sesuai fungsinya sebagai pengontrol atau otak dari suatu mesin yg
otomatis pada industri dan sebagainya.
Alokasi waktu untuk mempelajari modul ini di petakan menjadi berikut :
Kegiatan Belajar 1 : sistem pneumatik 12 jam pelajaran
Kegiatan Belajar 2 : Elektropneumatik 12 jam pelajaran
Kegiatan Belajar 3 : PLC (Programable Logic Control) 24 jam pelajaran
Total waktu yang dibutuhkan adalah 48 jam pelajaran
Untuk dapat mengikuti modul ini, peserta didik harus sudah menguasai materi Dasar
dan Pengukuran Listrik1 dan 2, Mikroprosesor, Teknik pemrograman dan Gerbang
Logika. Materi ini disampaikan pada kelas XI semester 2.

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
6
6. Apakah yang dimaksud dengan solenoid valve?
7. Relai, single silinder, double silinder dan timer. Manakah diantara komponen
tersebut yang termasuk aktuator?
8. Tegangan berapa yang dibutuhkan untuk PLC bekerja?
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
7
Kegiatan belajar siswa menggunakan modul ini di buat 3 kegiatan dengan rincian
sebagai berikut :
1. Memahami dan mengimplementasikan sistem pneumatik selama 12 jam
pelajaran.
2. Memahami dan mengimplementasikan sistem Elektropneumatik selama 12
jam pelajaran.
3. Memahami dan mengimplementasikan sistem pneumatik menggunakan
Kontrol PLC (di modul ini menggunakan Siemens S7-300) selama 24 jam
pelajaran.
1. Peserta didik dapat mengidentifikasi kontrol pneumatik
2. Peserta didik dapat mengenal simbol pneumatik pada sistem pneumatik
3. Peserta didik dapat membaca dan membuat diagram kontrol pneumatik.
4. Peserta didik dapat membuat rancangan sederhana sistem kontrol
pneumatik.
Dewasa ini, evolusi teknologi kontrol telah mencapai satu titik di mana hampir semua
proses dan manufaktur di industri merupakan kombinasi dari aplikasi berbagai
subsistem seperti pneumatiks, mechanics, electrics, computer, control dan
information technology. Disain mesin-mesin dan peralatan produksi modern dapat
dikatakan sebagai suatu mechanical construction dengan menggunakan
pneumatiks/hydraulic/electric actuator & motor sebagai penggeraknya dan PLC
sebagai main controller–nya. Didukung dengan berbagai komponen lain yang
BAB IIPEMBELAJARAN
6. Apakah yang dimaksud dengan solenoid valve?
7. Relai, single silinder, double silinder dan timer. Manakah diantara komponen
tersebut yang termasuk aktuator?
8. Tegangan berapa yang dibutuhkan untuk PLC bekerja?

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
8
berfungsi sebagai internal interfacedan operator interface. Misalnya solenoid, switch,
sensor, relai, encoder untuk internal interface, dan push button, thumb switch,
potensiometer untuk operator interface. Penggerak dari sistem otomasi tersebut
adalah fluida.
Fluida merupakan substansi yang dapat mengubah bentuk (mengikis) secara terus
menerus seperti yang terjadi pada aplikasi shear stress, atau pada fenomena alam
lainnya. Fluida dapat berbetuk gas dan cair. Teknik atau cara penggunaan fluida cair
pada aplikasi power transmission lazim disebut hydraulic sistem, sedang sistem
lain yang menggunakan fluida gas untuk aplikasi power transmission disebut sistem
pnumatik. Pada sistem hidrolik digunakan oli mineral sebagai fluida kerjanya,
sedang pada sistem pnumatikdigunakan udara atmosfir.
Mekanisasi dan otomatisasi dalam bidang proses dan manufaktur di industri
menjadikan pneumatik automation menjadi pilar utama dalam banyak industri,
misalnya untuk keperluan material handling, packaging, bottling, distributing, &
sorting sistem. Otomasi dengan pnumatikditerapkan di berbagai industri, misalnya
industri makanan & minuman, farmasi, logam, pertambangan dan petrokimia.
Kemajuan teknologi di bidang otomatisasi dengan pnumatik tersebut menuntut
tersedianya engineering and maintenance personal yang memiliki pengetahuan dan
pengalaman praktis di bidang mechanical, electrical, electronic and
compressed air/fluid power technologies. Penggunaan control pnumatik dan aktuasi
menjadi semakin luas. Salah satu alasannya adalah, dari sekian banyak masalah
otomasi industri, tidak ada medium yang lebih mudah didapat dan lebih ekonomis.
Disamping memiliki karakteristik positif sistem kontrol pnumatik juga memiliki
karakteristik negatif. Berikut ini diberikan beberapa karakteriistik positif dari
udara untuk pneumatiks automation:
Quantity : Tersedia di mana saja dan tak terbatas
Transportation : Mudah disalurkan melalui pipa
Storage : Dapat disimpan di dalam tanki atau botol
Temperature : Udara tidak sensitif terhadap fluktuasi suhu

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
9
Explosion-proof : Udara tekan tidak menyebabkan terjadinya
ledakan
Cleanliness : Udara tekan sangat bersih tidak menimbulkan
polusi
Construction : Konstruksi komponen pnumatik relatif sederhana.
Speed : Udara tekan merupakan working medium yang
mempunyai respon cepat [1-2 m/s]
Agar diperoleh garis demarkasi yang tegas dalam aplikasi otomasi dengan
pnumatik, berikut ini diberikan karakteristik negatif dari sistem pnumatik, yaitu:
Preparation : Udara tekan yang digunakan sebagai fluida kerja pada
sistem kontrol pnumatik harus memenuhi persyaratan
teknis dan perlu dipersiapkan dengan presisi, dan
memerlukan peralatan yang harganya realtif mahal.
Udara tekan harus bebas dari debu dan uap air (moisture),
karena dapat merusak komponen pneumatik
Force : Udara tekan mencapai titik ekonomisnya pada tekanan
700 kPa atau 7 bar dengan daya tekan sebesar 20.000 –
30.000 N.
Exhaust air : Exhaust air sangat bising, sehingga memerlukan
material yang dapat menyerap suara
Cost : Udara kempa merupakan medium yang relatif mahal
Hukum-hukum alam yang mendasari penerapan fluid sistem untuk membangun
mekanisasi dan manipulasi gerak adalah hukum. Hukum Pascal diaplikasikan pada
sistem fluid power transmission. Hukum fisika lainnya yang digunakan untuk
keperluan analisis, desain dan manufaktur pada sistem fluida adalah HukumBoyle,
Mariotte, Gay Lussac dan Charles.
Ada beberapa fenomena alamiah mengenai penggunaan energi di sekitar kita dimana
dengan tenaga input yang kecil dapat menghasilkan tenaga Output yang jauh lebih
besar. Diskusikan & Jelaskan secara konsep berdasarkan gambar berikut!. Hukum
apa yang mendasarinya?
Kata kunci:
gaya (F), tekanan (p), Luas piston (A), dan jarak angkat beban (S).
berfungsi sebagai internal interfacedan operator interface. Misalnya solenoid, switch,
sensor, relai, encoder untuk internal interface, dan push button, thumb switch,
potensiometer untuk operator interface. Penggerak dari sistem otomasi tersebut
adalah fluida.
Fluida merupakan substansi yang dapat mengubah bentuk (mengikis) secara terus
menerus seperti yang terjadi pada aplikasi shear stress, atau pada fenomena alam
lainnya. Fluida dapat berbetuk gas dan cair. Teknik atau cara penggunaan fluida cair
pada aplikasi power transmission lazim disebut hydraulic sistem, sedang sistem
lain yang menggunakan fluida gas untuk aplikasi power transmission disebut sistem
pnumatik. Pada sistem hidrolik digunakan oli mineral sebagai fluida kerjanya,
sedang pada sistem pnumatikdigunakan udara atmosfir.
Mekanisasi dan otomatisasi dalam bidang proses dan manufaktur di industri
menjadikan pneumatik automation menjadi pilar utama dalam banyak industri,
misalnya untuk keperluan material handling, packaging, bottling, distributing, &
sorting sistem. Otomasi dengan pnumatikditerapkan di berbagai industri, misalnya
industri makanan & minuman, farmasi, logam, pertambangan dan petrokimia.
Kemajuan teknologi di bidang otomatisasi dengan pnumatik tersebut menuntut
tersedianya engineering and maintenance personal yang memiliki pengetahuan dan
pengalaman praktis di bidang mechanical, electrical, electronic and
compressed air/fluid power technologies. Penggunaan control pnumatik dan aktuasi
menjadi semakin luas. Salah satu alasannya adalah, dari sekian banyak masalah
otomasi industri, tidak ada medium yang lebih mudah didapat dan lebih ekonomis.
Disamping memiliki karakteristik positif sistem kontrol pnumatik juga memiliki
karakteristik negatif. Berikut ini diberikan beberapa karakteriistik positif dari
udara untuk pneumatiks automation:
Quantity : Tersedia di mana saja dan tak terbatas
Transportation : Mudah disalurkan melalui pipa
Storage : Dapat disimpan di dalam tanki atau botol
Temperature : Udara tidak sensitif terhadap fluktuasi suhu
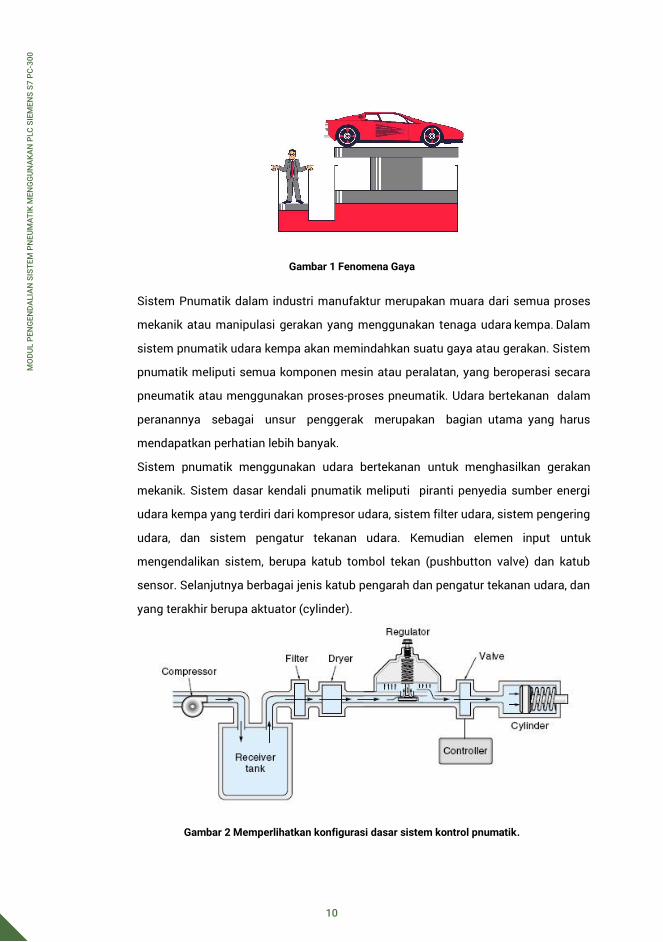
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
10
Sistem Pnumatik dalam industri manufaktur merupakan muara dari semua proses
mekanik atau manipulasi gerakan yang menggunakan tenaga udara kempa. Dalam
sistem pnumatik udara kempa akan memindahkan suatu gaya atau gerakan. Sistem
pnumatik meliputi semua komponen mesin atau peralatan, yang beroperasi secara
pneumatik atau menggunakan proses-proses pneumatik. Udara bertekanan dalam
peranannya sebagai unsur penggerak merupakan bagian utama yang harus
mendapatkan perhatian lebih banyak.
Sistem pnumatik menggunakan udara bertekanan untuk menghasilkan gerakan
mekanik. Sistem dasar kendali pnumatik meliputi piranti penyedia sumber energi
udara kempa yang terdiri dari kompresor udara, sistem filter udara, sistem pengering
udara, dan sistem pengatur tekanan udara. Kemudian elemen input untuk
mengendalikan sistem, berupa katub tombol tekan (pushbutton valve) dan katub
sensor. Selanjutnya berbagai jenis katub pengarah dan pengatur tekanan udara, dan
yang terakhir berupa aktuator (cylinder).

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
11
Sistem tersebut mencakup aircompressor, menghasilkan udara kempa secara
kontinyu, intakefilter berfungsi menahan kotoran udara sebelum masuk ke sistem,
dryer berfungsi menyerap uap air di udara (moisture), receiver tank sebagai
reservoar udara kempa, pressure regulator mengatur dan menjaga tekanan udara
tetap konstan, valve mengontrol aliran udara kempa, dan pneumatik cylinder sebagai
aktuator yang mengubah energi udara menjadi energi mekanik.
Sistem pnumatik meliputi semua komponen mesin atau peralatan, yang beroperasi
secara pneumatik atau menggunakan proses-proses pneumatik. Udara bertekanan
dalam peranannya sebagai unsur penggerak merupakan bagian utama yang harus
mendapatkan perhatian lebih banyak.
Pnumatik sistem menggunakan udara bertekanan untuk menghasilkan gerakan
mekanik. Sistem dasar kendali pnumatik meliputi piranti penyedia sumber energi
udara kempa yang terdiri dari kompresor udara, sistem filter udara, sistem pengering
udara, dan sistem pengatur telkanan udara. Kemudian eleven masukan untuk
mengendalikan sistem, berupa push button valve dan sensor valve.
Selanjutnya berbagai jenis katub pengarah dan pengatur tekanan udara, dan yang
terakhir berupa aktuator. Diagram rangkaian harus digambar dengan tata cara
penggambaran yang benar. Karena hal ini akan memudahkan seseorang untuk
membaca rangkaian, sehingga mempermudah pada saat merangkai atau mencari
kesalahan sistem pneumatik.
Tata letak komponen diagram rangkaian harus disesuaikan dengan diagram alir dari
mata rantai kontrol yaitu sebuah sinyal harus mulai mengalir dari bawah menuju ke
atas dari gambar rangkaian. : .
Sistem Pnumatik dalam industri manufaktur merupakan muara dari semua proses
mekanik atau manipulasi gerakan yang menggunakan tenaga udara kempa. Dalam
sistem pnumatik udara kempa akan memindahkan suatu gaya atau gerakan. Sistem
pnumatik meliputi semua komponen mesin atau peralatan, yang beroperasi secara
pneumatik atau menggunakan proses-proses pneumatik. Udara bertekanan dalam
peranannya sebagai unsur penggerak merupakan bagian utama yang harus
mendapatkan perhatian lebih banyak.
Sistem pnumatik menggunakan udara bertekanan untuk menghasilkan gerakan
mekanik. Sistem dasar kendali pnumatik meliputi piranti penyedia sumber energi
udara kempa yang terdiri dari kompresor udara, sistem filter udara, sistem pengering
udara, dan sistem pengatur tekanan udara. Kemudian elemen input untuk
mengendalikan sistem, berupa katub tombol tekan (pushbutton valve) dan katub
sensor. Selanjutnya berbagai jenis katub pengarah dan pengatur tekanan udara, dan
yang terakhir berupa aktuator (cylinder).
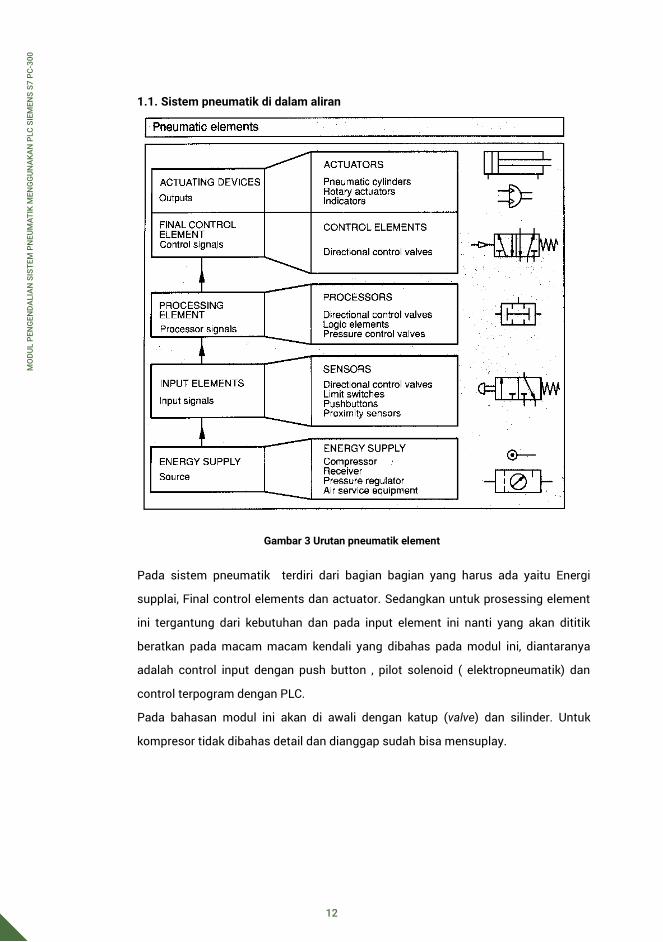
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
12
Nama
Komponen Keterangan Simbol
Katup 2/2 Mempunyai 2 lubang ( masukan dan keluaran )
dan 2 posisi hubungan katup
1(P)
2(A)
Lubang keluaran tertutup. Pada posisi normal
tertutup , tidak aliran yang keluar (konfigurasi
NC.)
Pada posisi normal terbuka, ada aliran keluar (
konfigurasi NO ) 1(P)
2(A)
Katup 3/2 Mempunyai 3 lubang ( masukan , keluaran dan
pembuangan ) dan 2 posisi hubungan katup
2(A)
3(R)1(P) Pada posisi normal, tidak ada aliran udara yang
keluar ( konfigurasi NC ).
Pada posisi normal , ada aliran udara yang
keluar ( konfigurasi NO ).
2(A)
3(R)1(P)
Katup 4/2 Mempunyai 4 lubang ( masukan , keluaran dan
1 pembuangan ) dan 2 posisi hubungan katup
.
2(B)
3(R)1(P)
4(A)
Katup 5/2 Mempunyai 5 lubang.( masukan , keluaran dan
2 pembuangan ) dan 2 posisi hubungan katup.
1(P)
2(B)
3(S)
4(A)
5(R)
Pada sistem pneumatik terdiri dari bagian bagian yang harus ada yaitu Energi
supplai, Final control elements dan actuator. Sedangkan untuk prosessing element
ini tergantung dari kebutuhan dan pada input element ini nanti yang akan dititik
beratkan pada macam macam kendali yang dibahas pada modul ini, diantaranya
adalah control input dengan push button , pilot solenoid ( elektropneumatik) dan
control terpogram dengan PLC.
Pada bahasan modul ini akan di awali dengan katup (valve) dan silinder. Untuk
kompresor tidak dibahas detail dan dianggap sudah bisa mensuplay.
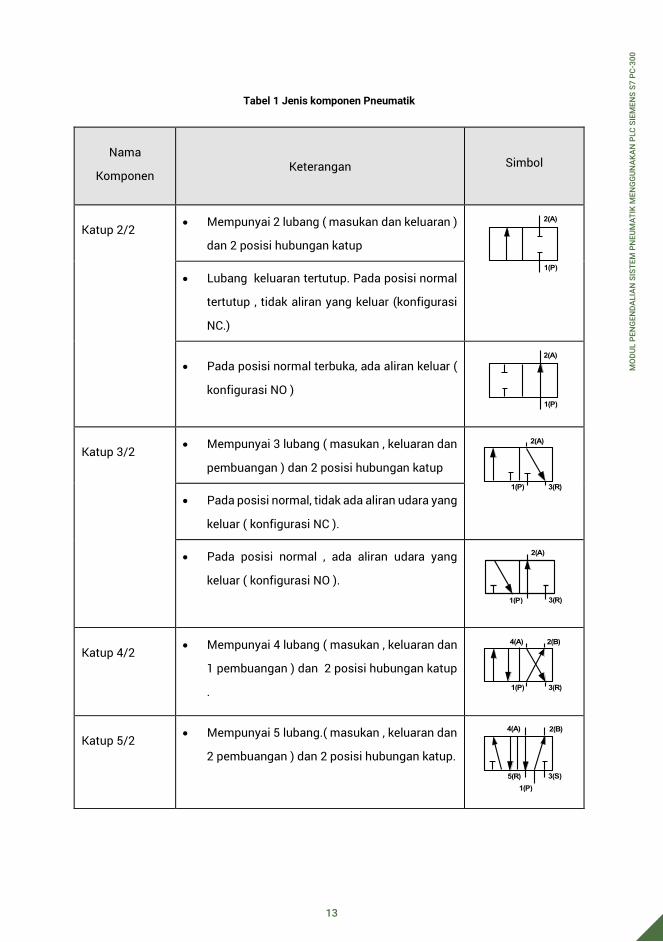
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
13
Nama
Komponen Keterangan Simbol
Katup 2/2 Mempunyai 2 lubang ( masukan dan keluaran )
dan 2 posisi hubungan katup
1(P)
2(A)
Lubang keluaran tertutup. Pada posisi normal
tertutup , tidak aliran yang keluar (konfigurasi
NC.)
Pada posisi normal terbuka, ada aliran keluar (
konfigurasi NO ) 1(P)
2(A)
Katup 3/2 Mempunyai 3 lubang ( masukan , keluaran dan
pembuangan ) dan 2 posisi hubungan katup
2(A)
3(R)1(P) Pada posisi normal, tidak ada aliran udara yang
keluar ( konfigurasi NC ).
Pada posisi normal , ada aliran udara yang
keluar ( konfigurasi NO ).
2(A)
3(R)1(P)
Katup 4/2 Mempunyai 4 lubang ( masukan , keluaran dan
1 pembuangan ) dan 2 posisi hubungan katup
.
2(B)
3(R)1(P)
4(A)
Katup 5/2 Mempunyai 5 lubang.( masukan , keluaran dan
2 pembuangan ) dan 2 posisi hubungan katup.
1(P)
2(B)
3(S)
4(A)
5(R)
Pada sistem pneumatik terdiri dari bagian bagian yang harus ada yaitu Energi
supplai, Final control elements dan actuator. Sedangkan untuk prosessing element
ini tergantung dari kebutuhan dan pada input element ini nanti yang akan dititik
beratkan pada macam macam kendali yang dibahas pada modul ini, diantaranya
adalah control input dengan push button , pilot solenoid ( elektropneumatik) dan
control terpogram dengan PLC.
Pada bahasan modul ini akan di awali dengan katup (valve) dan silinder. Untuk
kompresor tidak dibahas detail dan dianggap sudah bisa mensuplay.

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
14
Nama
Komponen Keterangan Simbol
Katup 3/3 Mempunyai 3 lubang ( masukan, keluaran dan
pembuangan ) dan 3 posisi hubungan katup.
Pada posisi normal ( tengah ) tertutup
2(A)
3(R)1(P)
Katup 4/3 Mempunyai 4 lubang ( masukan, keluaran dan
pembuangan ) dan 3 posisi hubungan katup
Pada posisi normal ( tengah ) lubang keluaran
sambung dengan pembuangan.
1(P) 3(R)
4(A) 2(B)
Katup 5/3 Mempunyai 5 lubang ( masukan, keluaran dan
pembuangan ) dan 3 posisi hubungan katup
Pada posisi normal ( tengah ) tertutup 1(P)3(S)5(R)
4(A) 2(B)
Jenis jenis silinder
Silinder dibagi menjadi 2, yaitu silinder single acting dan silinder doble acting

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
15
Cara kerja silinder ini selalu digerakkan dengan valve 3/2 sebagai pemberi input
signal dan juga sebagai exhause saat retrac atau kembali dengan menggunakan
spring / pegas.
(a) (b)
Batang piston silinder kerja tunggal bergerak keluar pada saat silinder menerima
udara bertekanan. Jika udara bertekanan dihilangkan, secara otomatis piston
kembali lagi ke posisi awal.
Posisi Awal
Posisi awal (gambar 2.7a) didefinisikan sebagai posisi normal dari sistem. Semua
bagian terhubung dan tombol tidak ditekan oleh operator. Udara bertekanan
dari catu daya ditutup, piston masuk ke dalam oleh dorongan pegas kembali. Lubang
masukan silinder dihubungkan ke lubang pembuangan melalui katup. Pengiriman
bertekanan diputus oleh katup.
Tombol ditekan
Menekan tombol tekan berarti memindahkan posisi katup 3/2, melawan pegas katup.
Diagram (gambar 2.7b) menunjukkan katup teraktifkan pada posisi kerja. Udara
bertekanan dari catu daya melalui katup masuk ke lubang masukan silinder kerja
tunggal. Udara bertekanan yang terkumpul menyebabkan batang piston bergerak
keluar melawan gaya pegas kembali. Setelah piston sampai pada posisi akhir langkah
maju, maka tekanan udara di dalam tabung silinder meningkat mencapai harga
maksimum.
Tombol dilepas
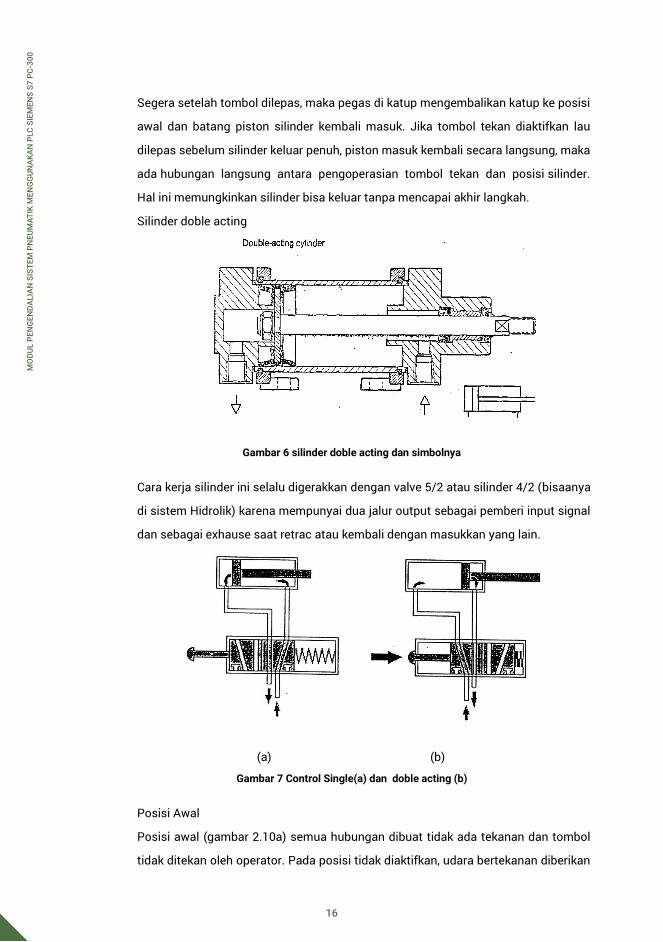
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
16
Segera setelah tombol dilepas, maka pegas di katup mengembalikan katup ke posisi
awal dan batang piston silinder kembali masuk. Jika tombol tekan diaktifkan lau
dilepas sebelum silinder keluar penuh, piston masuk kembali secara langsung, maka
ada hubungan langsung antara pengoperasian tombol tekan dan posisi silinder.
Hal ini memungkinkan silinder bisa keluar tanpa mencapai akhir langkah.
Silinder doble acting
Cara kerja silinder ini selalu digerakkan dengan valve 5/2 atau silinder 4/2 (bisaanya
di sistem Hidrolik) karena mempunyai dua jalur output sebagai pemberi input signal
dan sebagai exhause saat retrac atau kembali dengan masukkan yang lain.
(a) (b)
Posisi Awal
Posisi awal (gambar 2.10a) semua hubungan dibuat tidak ada tekanan dan tombol
tidak ditekan oleh operator. Pada posisi tidak diaktifkan, udara bertekanan diberikan

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
17
pada sisi batang piston silinder, sedangkan udara pada sisi piston silinder dibuang
melalui saluran buang katup.
Tombol ditekan
Menekan tombol berarti memindahkan posisi katup 4/2 melawan gaya pegas
pengembali. Diagram rangkaian (gambar 2.10b) menunjukkan katup aktif pada posisi
kerja. Pada posisi ini suplai udara bertekanan dialirkan ke sisi piston silinder dan
udara pada sisi batang piston dibuang keluar lewat katup. Tekanan pada sisi piston
mendorong keluar batang piston. Pada saat langlah keluar penuh dicapai, tekanan
pada sisi piston mencapai maksimum.
Tombol dilepas
Tombol tekan dilepas, pegas pengembali katup menekan katup kembali ke posisi
semula. Sekarang suplai udara bertekanan dialirkan ke sisi batang piston dan udara
pada sisi piston dibuang keluar melalui katup, sehingga batang piston silinder kerja
ganda masuk kembali.
Diagram sistem pneumatik dari suatu sistem kontrol dihubungkan satu sama lain dan
bagaimana mereka berinteraksi. Simbol-simbol grafis yang merupakan komponen-
komponen akan diatur sedemikian rupa untuk memperoleh suatu diagram rangkaian
yang jelas,dimana terdapat suatu persimpangan saluran-saluran sekecil mungkin.
Suatu diagram rangkaian pneumatik oleh sebab itu,tidak mengungkapkan susunan
ruang . Dalam suatu diagram rangkaian pneumatik komponen-komponen
dipresentasikan oleh simbol-simbol grafis (rangkaian) yang di standarisasi sesuai
dengan DIN/ISO 1219.1 Simbol grafis menjelaskan karakteristik dari tiap komponen
meliputi:
a. Jenis aktuasi
b. Jumlah pos dan tujuannya
c. Jumlah posisi saklar
Dalam membuat diagram rangkaian (circuit diagram) pneumatik, setiap jenis katup
yang digunakan harus digambarkan secara simbul-simbul saja. Simbul-simbul ini
Segera setelah tombol dilepas, maka pegas di katup mengembalikan katup ke posisi
awal dan batang piston silinder kembali masuk. Jika tombol tekan diaktifkan lau
dilepas sebelum silinder keluar penuh, piston masuk kembali secara langsung, maka
ada hubungan langsung antara pengoperasian tombol tekan dan posisi silinder.
Hal ini memungkinkan silinder bisa keluar tanpa mencapai akhir langkah.
Silinder doble acting
Cara kerja silinder ini selalu digerakkan dengan valve 5/2 atau silinder 4/2 (bisaanya
di sistem Hidrolik) karena mempunyai dua jalur output sebagai pemberi input signal
dan sebagai exhause saat retrac atau kembali dengan masukkan yang lain.
(a) (b)
Posisi Awal
Posisi awal (gambar 2.10a) semua hubungan dibuat tidak ada tekanan dan tombol
tidak ditekan oleh operator. Pada posisi tidak diaktifkan, udara bertekanan diberikan
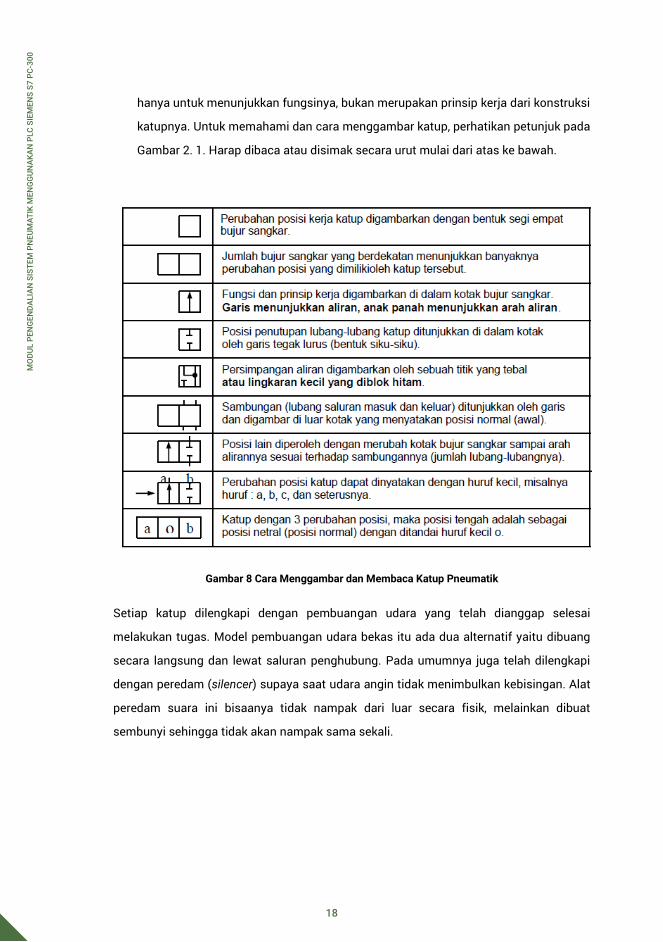
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
18
hanya untuk menunjukkan fungsinya, bukan merupakan prinsip kerja dari konstruksi
katupnya. Untuk memahami dan cara menggambar katup, perhatikan petunjuk pada
Gambar 2. 1. Harap dibaca atau disimak secara urut mulai dari atas ke bawah.
Setiap katup dilengkapi dengan pembuangan udara yang telah dianggap selesai
melakukan tugas. Model pembuangan udara bekas itu ada dua alternatif yaitu dibuang
secara langsung dan lewat saluran penghubung. Pada umumnya juga telah dilengkapi
dengan peredam (silencer) supaya saat udara angin tidak menimbulkan kebisingan. Alat
peredam suara ini bisaanya tidak nampak dari luar secara fisik, melainkan dibuat
sembunyi sehingga tidak akan nampak sama sekali.
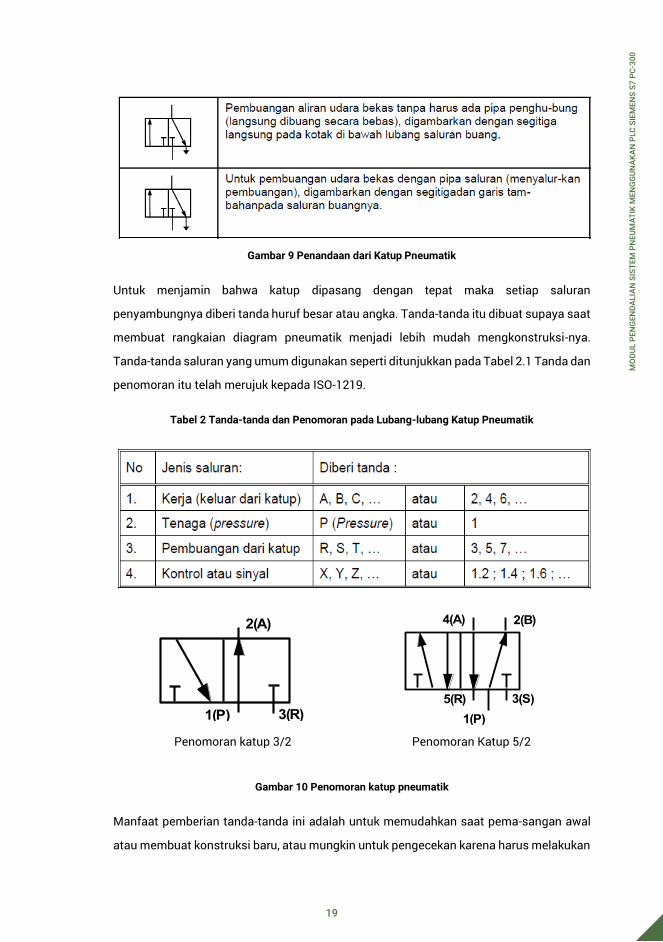
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
19
Untuk menjamin bahwa katup dipasang dengan tepat maka setiap saluran
penyambungnya diberi tanda huruf besar atau angka. Tanda-tanda itu dibuat supaya saat
membuat rangkaian diagram pneumatik menjadi lebih mudah mengkonstruksi-nya.
Tanda-tanda saluran yang umum digunakan seperti ditunjukkan pada Tabel 2.1 Tanda dan
penomoran itu telah merujuk kepada ISO-1219.
2(A)
3(R)1(P) 1(P)
2(B)
3(S)
4(A)
5(R)
Penomoran katup 3/2 Penomoran Katup 5/2
Manfaat pemberian tanda-tanda ini adalah untuk memudahkan saat pema-sangan awal
atau membuat konstruksi baru, atau mungkin untuk pengecekan karena harus melakukan
hanya untuk menunjukkan fungsinya, bukan merupakan prinsip kerja dari konstruksi
katupnya. Untuk memahami dan cara menggambar katup, perhatikan petunjuk pada
Gambar 2. 1. Harap dibaca atau disimak secara urut mulai dari atas ke bawah.
Setiap katup dilengkapi dengan pembuangan udara yang telah dianggap selesai
melakukan tugas. Model pembuangan udara bekas itu ada dua alternatif yaitu dibuang
secara langsung dan lewat saluran penghubung. Pada umumnya juga telah dilengkapi
dengan peredam (silencer) supaya saat udara angin tidak menimbulkan kebisingan. Alat
peredam suara ini bisaanya tidak nampak dari luar secara fisik, melainkan dibuat
sembunyi sehingga tidak akan nampak sama sekali.
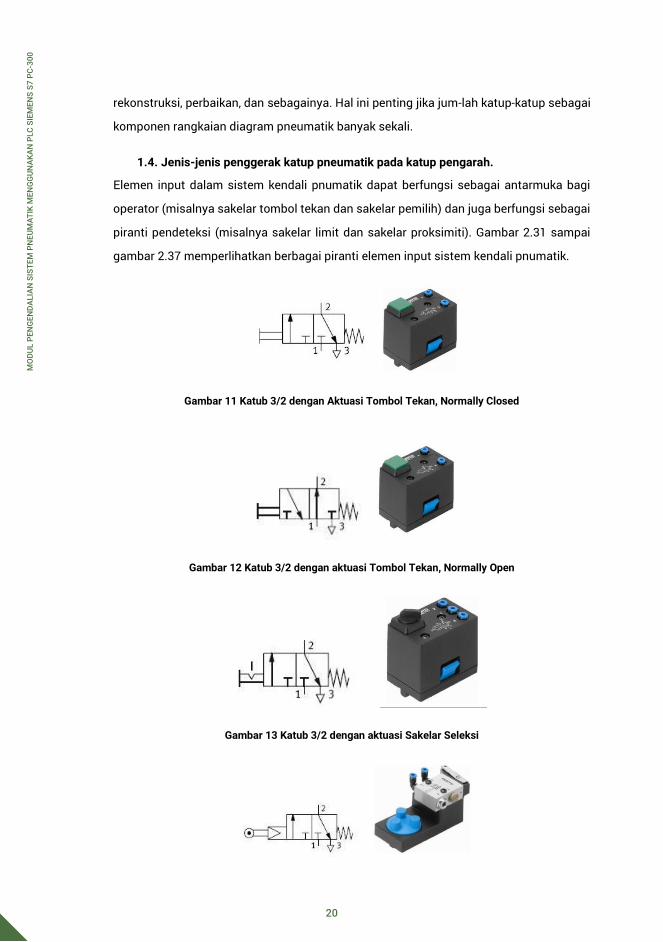
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
20
Mekanik :
Pneumatik
Listrik
rekonstruksi, perbaikan, dan sebagainya. Hal ini penting jika jum-lah katup-katup sebagai
komponen rangkaian diagram pneumatik banyak sekali.
Elemen input dalam sistem kendali pnumatik dapat berfungsi sebagai antarmuka bagi
operator (misalnya sakelar tombol tekan dan sakelar pemilih) dan juga berfungsi sebagai
piranti pendeteksi (misalnya sakelar limit dan sakelar proksimiti). Gambar 2.31 sampai
gambar 2.37 memperlihatkan berbagai piranti elemen input sistem kendali pnumatik.
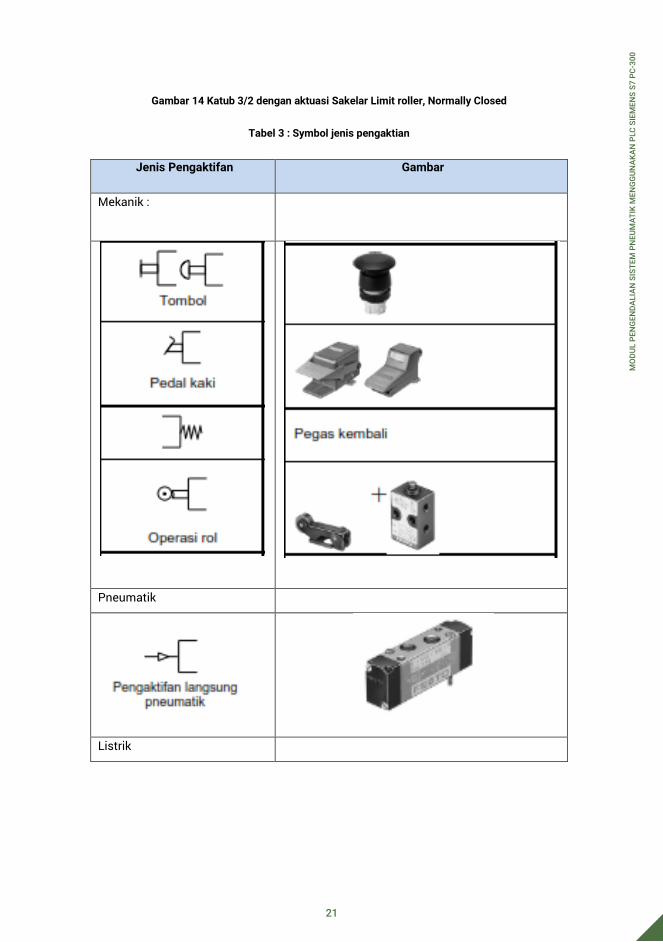
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
21
Mekanik :
Pneumatik
Listrik
rekonstruksi, perbaikan, dan sebagainya. Hal ini penting jika jum-lah katup-katup sebagai
komponen rangkaian diagram pneumatik banyak sekali.
Elemen input dalam sistem kendali pnumatik dapat berfungsi sebagai antarmuka bagi
operator (misalnya sakelar tombol tekan dan sakelar pemilih) dan juga berfungsi sebagai
piranti pendeteksi (misalnya sakelar limit dan sakelar proksimiti). Gambar 2.31 sampai
gambar 2.37 memperlihatkan berbagai piranti elemen input sistem kendali pnumatik.
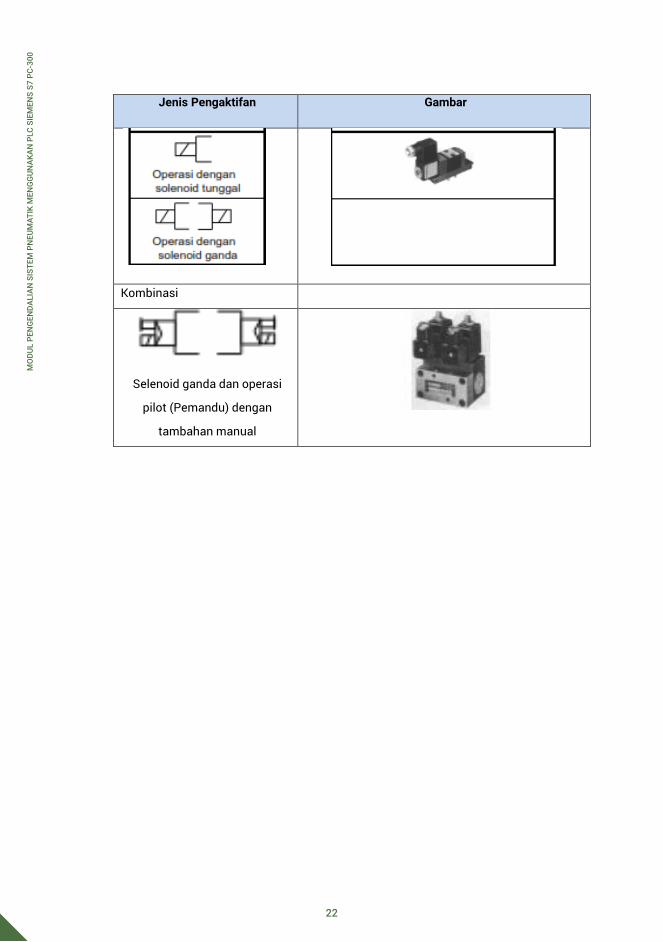
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
22
Setelah kita mengenal simbol-simbol pneumatik maka gambar gambar rancangan
sirkuit elektropneumatik akan kita komunikasikan dengan grafik -simbol. Hal ini akan
sangat mudah untuk menggambar maupun memahaminya. Lain halnya bila kita
menggambar rangkaian dengan menggunakan gambar benda sesungguhnya kita
akan mengalami kesulitan. Berikut ini suatu contoh sirkuit pneumatik dan yang
digambar dengan gambar benda untuk dfibandingkan dengan diagram sirkuit yang
digambarkan dengan grafik simbol.
Penandaan tiap-tiap elemen kontrol untuk mengetahui dimana lokasi elemen
tersebut berada. Ada dua macam penandaan yang telah dikenal dan sering
digunakan yaitu :
1. Penandaan dengan angka
Kombinasi
Selenoid ganda dan operasi
pilot (Pemandu) dengan
tambahan manual
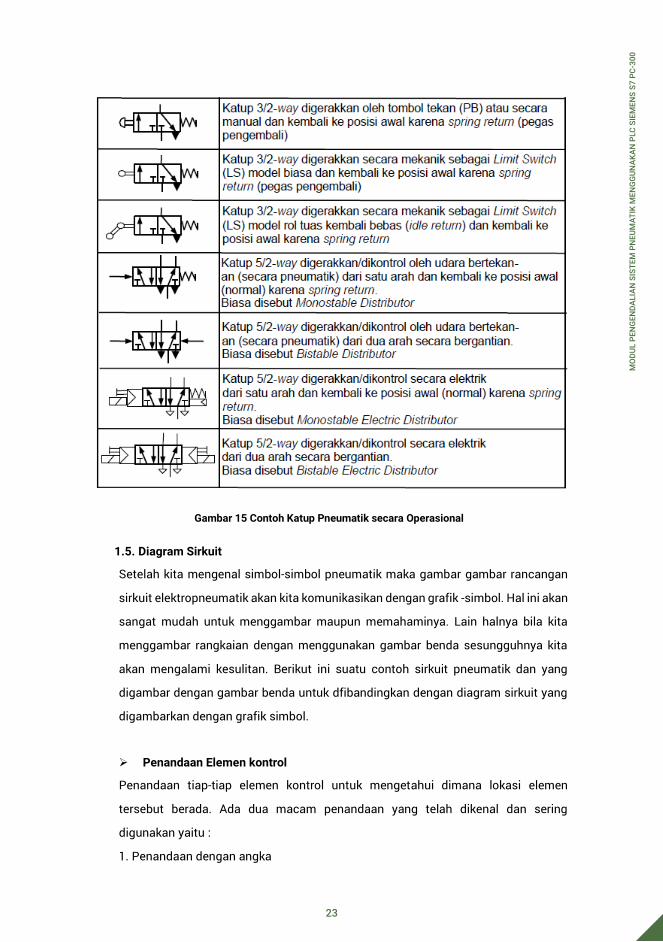
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
23
Setelah kita mengenal simbol-simbol pneumatik maka gambar gambar rancangan
sirkuit elektropneumatik akan kita komunikasikan dengan grafik -simbol. Hal ini akan
sangat mudah untuk menggambar maupun memahaminya. Lain halnya bila kita
menggambar rangkaian dengan menggunakan gambar benda sesungguhnya kita
akan mengalami kesulitan. Berikut ini suatu contoh sirkuit pneumatik dan yang
digambar dengan gambar benda untuk dfibandingkan dengan diagram sirkuit yang
digambarkan dengan grafik simbol.
Penandaan tiap-tiap elemen kontrol untuk mengetahui dimana lokasi elemen
tersebut berada. Ada dua macam penandaan yang telah dikenal dan sering
digunakan yaitu :
1. Penandaan dengan angka
Kombinasi
Selenoid ganda dan operasi
pilot (Pemandu) dengan
tambahan manual
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
24
Karena rangkaian hanya terdiri dari satu grup, maka semua elemen angka
pertama bertanda 1, artinya lokasinya berada pada grup 1. Silinder ditandai
dengan angka 1.0. Katup kontrol akhir ditanda dengan angka 1.1. Katup-katup yang
menyebabkan silinder bergerak maju ditandai dengan angka : 1.2, 1.4 dan 1.6.
Sedangkan katup yang menyebabkan silinder bergerak mundur ditandai dengan
angka 1.3. Sumber energi ditandai 0.1.
Tipe ini digunakan terutama pada rangkaian yang dikembangkan secara metodik.
Untuk pemakaian yang luas, tipe ini meliputi kalkulasi dan daftar yang dapat
dilakukan lebih mudah dan lebih jelas jika menggunakan huruf. Elemen kerja
ditandai dengan huruf besar, elemen sinyal dan limit switch ditandai dengan huruf
kecil. Bertolak belakang dengan tipe terdahulu, elemen sinyal dan limit switch tidak
ditandai ke dalam kelompok grup. Lokasi tipe ini seperti diilustrasikan pada gambar
berikut :
2. Penandaan dengan huruf
Penandaan Dengan Angka
Disini ada beberapa kemungkinan untuk menandai dengan angka. Dua sistem yang
sering digunakan yaitu :
1. Nomor seri, Sistem ini sebaiknya untuk kontrol yang rumit .
2. Penandaan yang disusun dari nomor grup dan nomor seri dengan grup, misalnya
4.12 artinya elemen 12 pada grup 4
Klasifikasi grup :
Grup 0 : semua elemen sumber energi ditandai dengan angka depan 0
Grup 1, 2, 3, … : penandaan dari satu mata rantai kontrol ( grup ).
Sistem untuk nomor seri :
.0 : elemen kerja
.1 : elemen kontrol
.2, .4 : semua elemen yang mempunyai pengaruh pada gerakan maju,
ditandai dengan nomor seri genap.
.3 , .5 : semua elemen yang mempunyai pengaruh pada gerakan mundur,
ditandai dengan nomor seri gasal.
.01, .02 : elemen antara elemen kontrol dan elemen kerja yaitu katup kontrol
aliran dan katup buangan-cepat.
Sistem penandaan berdasarkan pada sistem nomor grup mempunyai keuntungan
bahwa dalam praktiknya seorang perawatan dapat mengenali pengaruh dari sinyal
dari nomor pada masing-masing komponen. Sebagai contoh : jika terjadi
kegagalan pada silinder 2.0, maka dapat diasumsikan bahwa penyebabnya dapat
ditemukan pada grup 2, oleh karena itu komponenkomponen yang mempunyai tanda
angka pertama 2 harus diperiksa. Gambar berikut menunjukkan penandaan elemen
dari sebuah mata rantai kontrol.
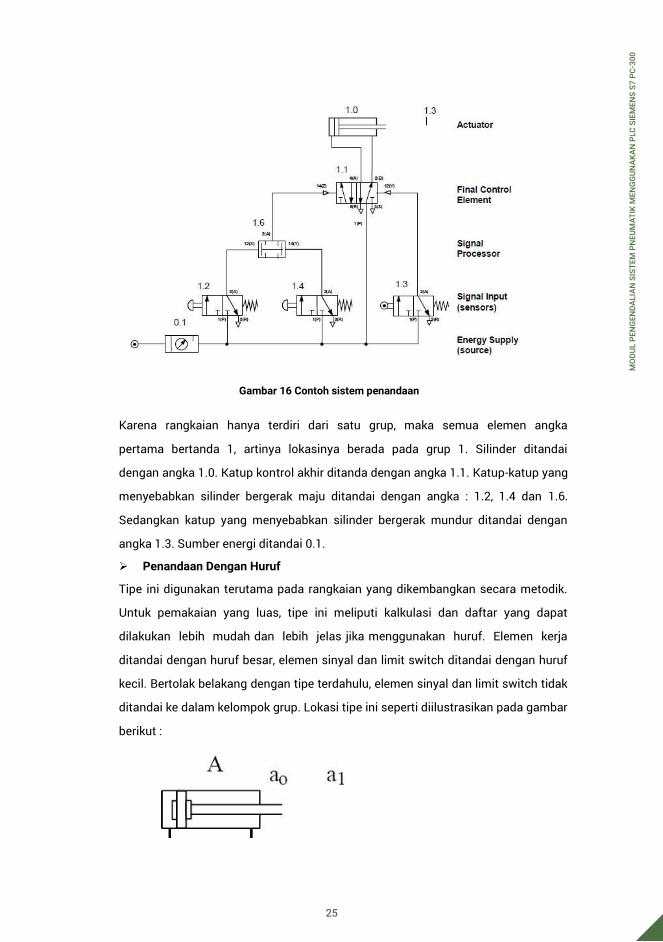
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
25
Karena rangkaian hanya terdiri dari satu grup, maka semua elemen angka
pertama bertanda 1, artinya lokasinya berada pada grup 1. Silinder ditandai
dengan angka 1.0. Katup kontrol akhir ditanda dengan angka 1.1. Katup-katup yang
menyebabkan silinder bergerak maju ditandai dengan angka : 1.2, 1.4 dan 1.6.
Sedangkan katup yang menyebabkan silinder bergerak mundur ditandai dengan
angka 1.3. Sumber energi ditandai 0.1.
Tipe ini digunakan terutama pada rangkaian yang dikembangkan secara metodik.
Untuk pemakaian yang luas, tipe ini meliputi kalkulasi dan daftar yang dapat
dilakukan lebih mudah dan lebih jelas jika menggunakan huruf. Elemen kerja
ditandai dengan huruf besar, elemen sinyal dan limit switch ditandai dengan huruf
kecil. Bertolak belakang dengan tipe terdahulu, elemen sinyal dan limit switch tidak
ditandai ke dalam kelompok grup. Lokasi tipe ini seperti diilustrasikan pada gambar
berikut :
2. Penandaan dengan huruf
Penandaan Dengan Angka
Disini ada beberapa kemungkinan untuk menandai dengan angka. Dua sistem yang
sering digunakan yaitu :
1. Nomor seri, Sistem ini sebaiknya untuk kontrol yang rumit .
2. Penandaan yang disusun dari nomor grup dan nomor seri dengan grup, misalnya
4.12 artinya elemen 12 pada grup 4
Klasifikasi grup :
Grup 0 : semua elemen sumber energi ditandai dengan angka depan 0
Grup 1, 2, 3, … : penandaan dari satu mata rantai kontrol ( grup ).
Sistem untuk nomor seri :
.0 : elemen kerja
.1 : elemen kontrol
.2, .4 : semua elemen yang mempunyai pengaruh pada gerakan maju,
ditandai dengan nomor seri genap.
.3 , .5 : semua elemen yang mempunyai pengaruh pada gerakan mundur,
ditandai dengan nomor seri gasal.
.01, .02 : elemen antara elemen kontrol dan elemen kerja yaitu katup kontrol
aliran dan katup buangan-cepat.
Sistem penandaan berdasarkan pada sistem nomor grup mempunyai keuntungan
bahwa dalam praktiknya seorang perawatan dapat mengenali pengaruh dari sinyal
dari nomor pada masing-masing komponen. Sebagai contoh : jika terjadi
kegagalan pada silinder 2.0, maka dapat diasumsikan bahwa penyebabnya dapat
ditemukan pada grup 2, oleh karena itu komponenkomponen yang mempunyai tanda
angka pertama 2 harus diperiksa. Gambar berikut menunjukkan penandaan elemen
dari sebuah mata rantai kontrol.

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
26
A, B, C… : tanda dari elemen-elemen kerja
ao, bo, co… : tanda dari limit switch yang digerakkan pada posisi belakang
silinder A, B,C ….
a1, b2, c3… : tanda dari limit switch yang digerakkan pada posisi batang
piston ke depan dari silinder A, B,C ….
Keuntungan dari tipe ini adalah dapat dengan segera diketahui komponen sinyal
yang sedang digerakkan jika silinder bergerak ke posisi yang dituju. Misalnya,
gerakan A+ menunjukkan limit switch a1 yang diperintahkan bekerja, dan gerakan A-
menunjukkan limit switch ao yang diperintahkan bekerja. Dalam praktiknya,
penandaan elemen-elemen suatu rangkaian pneumatik menggunakan kombinasi
angka dan huruf.
Setelah peserta didik mengetahui bagian dan fungsi dari komponen maka langkah
berikutnya adalah merangkai menjadi sistem pneumatik. Sistem pneumatik adalah
rangkaian komponen pneumatik yang menggerakkan actuator . Berikut dasar dari
sistem pneumatik
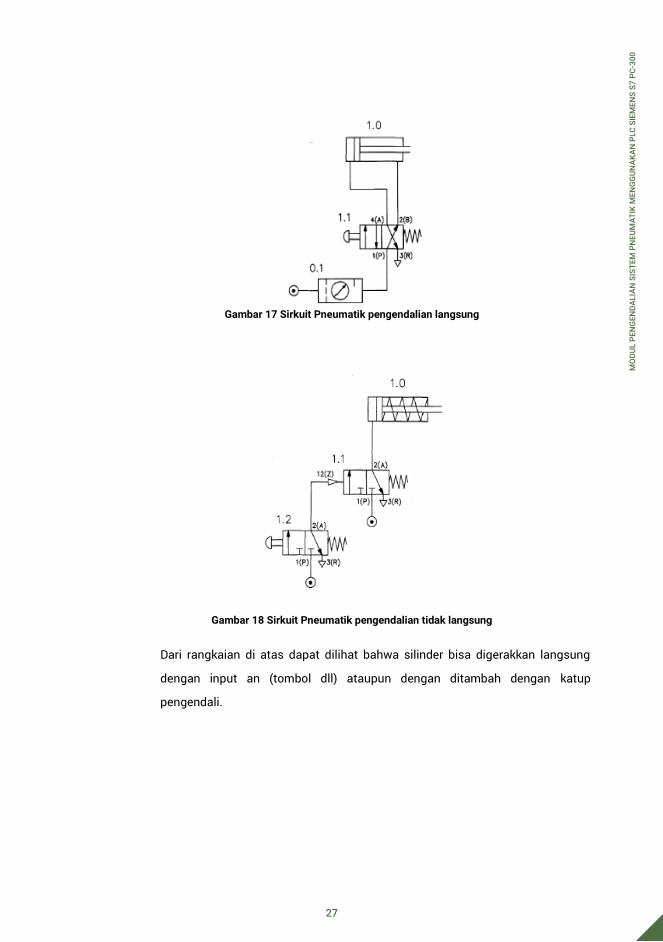
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
27
Dari rangkaian di atas dapat dilihat bahwa silinder bisa digerakkan langsung
dengan input an (tombol dll) ataupun dengan ditambah dengan katup
pengendali.
A, B, C… : tanda dari elemen-elemen kerja
ao, bo, co… : tanda dari limit switch yang digerakkan pada posisi belakang
silinder A, B,C ….
a1, b2, c3… : tanda dari limit switch yang digerakkan pada posisi batang
piston ke depan dari silinder A, B,C ….
Keuntungan dari tipe ini adalah dapat dengan segera diketahui komponen sinyal
yang sedang digerakkan jika silinder bergerak ke posisi yang dituju. Misalnya,
gerakan A+ menunjukkan limit switch a1 yang diperintahkan bekerja, dan gerakan A-
menunjukkan limit switch ao yang diperintahkan bekerja. Dalam praktiknya,
penandaan elemen-elemen suatu rangkaian pneumatik menggunakan kombinasi
angka dan huruf.
Setelah peserta didik mengetahui bagian dan fungsi dari komponen maka langkah
berikutnya adalah merangkai menjadi sistem pneumatik. Sistem pneumatik adalah
rangkaian komponen pneumatik yang menggerakkan actuator . Berikut dasar dari
sistem pneumatik
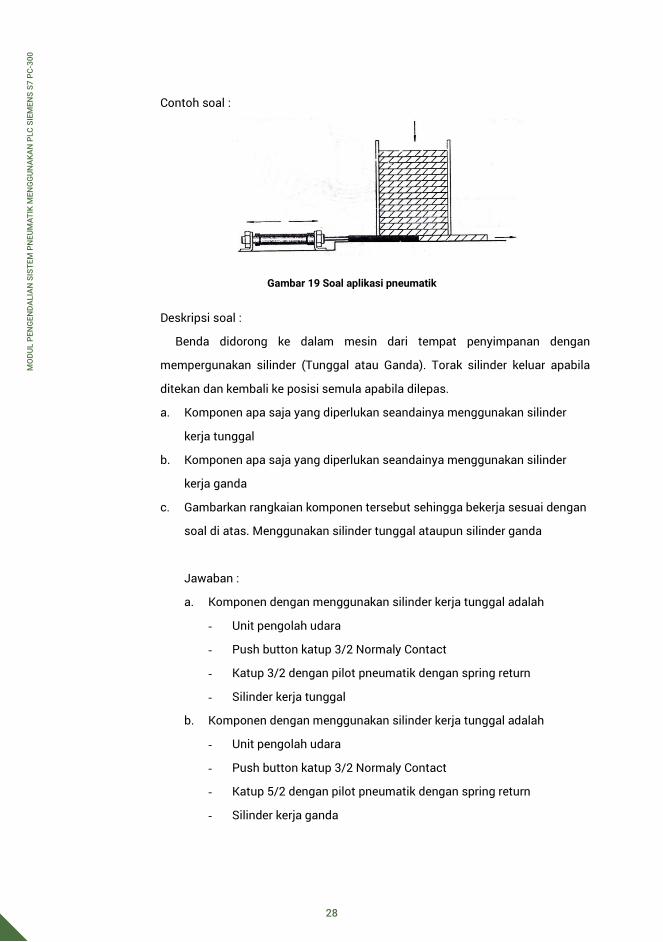
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
28
c. Gambar rangkaian
Gambar Rangkaian silinder kerja
tunggal
Gambar Rangkaian silinder kerja
Ganda
Actuator melakukan banyak pekerjaan dalam hal membangkitkan berbagai
pergerakan misalnya cilinder dan motor pnumatik. Actuator merupakan piranti
terakhir dari untaian kontrol. Aktuator mengubah control signal ke dalam suatu
kerja tertentu. Contoh actuator yang banyak dijumpai di dalam industrial
automation, yaitu Cylinders, motors, lighting devices, heating devices, visual and
acoustic alarm devices, dan lain-lainnya.
Dilihat dari jenis pergerakannya, maka actuator dapat dikelompokkan menjadi 3
main areas, yaitu
- Linear motion
- swivel motion
- rotary motion
- End effectors
Katub kendali aliran atau flow-control valve, mengendalikan aliran udara kempa,
yang akan digunakan untuk menggerakkan aktuator. Katub kendali aliran
Contoh soal :
Deskripsi soal :
Benda didorong ke dalam mesin dari tempat penyimpanan dengan
mempergunakan silinder (Tunggal atau Ganda). Torak silinder keluar apabila
ditekan dan kembali ke posisi semula apabila dilepas.
a. Komponen apa saja yang diperlukan seandainya menggunakan silinder
kerja tunggal
b. Komponen apa saja yang diperlukan seandainya menggunakan silinder
kerja ganda
c. Gambarkan rangkaian komponen tersebut sehingga bekerja sesuai dengan
soal di atas. Menggunakan silinder tunggal ataupun silinder ganda
Jawaban :
a. Komponen dengan menggunakan silinder kerja tunggal adalah
- Unit pengolah udara
- Push button katup 3/2 Normaly Contact
- Katup 3/2 dengan pilot pneumatik dengan spring return
- Silinder kerja tunggal
b. Komponen dengan menggunakan silinder kerja tunggal adalah
- Unit pengolah udara
- Push button katup 3/2 Normaly Contact
- Katup 5/2 dengan pilot pneumatik dengan spring return
- Silinder kerja ganda
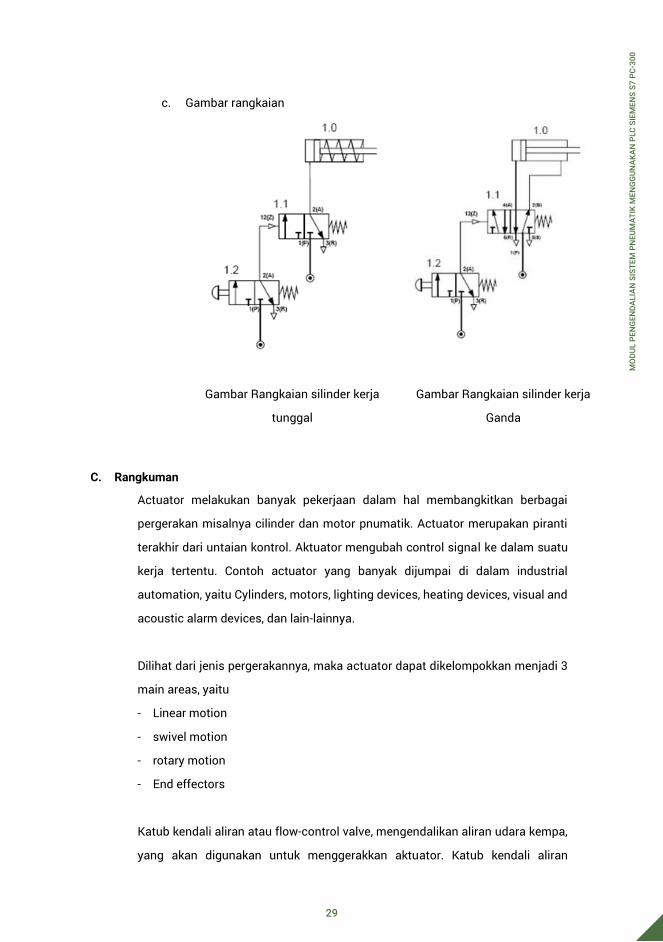
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
29
c. Gambar rangkaian
Gambar Rangkaian silinder kerja
tunggal
Gambar Rangkaian silinder kerja
Ganda
Actuator melakukan banyak pekerjaan dalam hal membangkitkan berbagai
pergerakan misalnya cilinder dan motor pnumatik. Actuator merupakan piranti
terakhir dari untaian kontrol. Aktuator mengubah control signal ke dalam suatu
kerja tertentu. Contoh actuator yang banyak dijumpai di dalam industrial
automation, yaitu Cylinders, motors, lighting devices, heating devices, visual and
acoustic alarm devices, dan lain-lainnya.
Dilihat dari jenis pergerakannya, maka actuator dapat dikelompokkan menjadi 3
main areas, yaitu
- Linear motion
- swivel motion
- rotary motion
- End effectors
Katub kendali aliran atau flow-control valve, mengendalikan aliran udara kempa,
yang akan digunakan untuk menggerakkan aktuator. Katub kendali aliran
Contoh soal :
Deskripsi soal :
Benda didorong ke dalam mesin dari tempat penyimpanan dengan
mempergunakan silinder (Tunggal atau Ganda). Torak silinder keluar apabila
ditekan dan kembali ke posisi semula apabila dilepas.
a. Komponen apa saja yang diperlukan seandainya menggunakan silinder
kerja tunggal
b. Komponen apa saja yang diperlukan seandainya menggunakan silinder
kerja ganda
c. Gambarkan rangkaian komponen tersebut sehingga bekerja sesuai dengan
soal di atas. Menggunakan silinder tunggal ataupun silinder ganda
Jawaban :
a. Komponen dengan menggunakan silinder kerja tunggal adalah
- Unit pengolah udara
- Push button katup 3/2 Normaly Contact
- Katup 3/2 dengan pilot pneumatik dengan spring return
- Silinder kerja tunggal
b. Komponen dengan menggunakan silinder kerja tunggal adalah
- Unit pengolah udara
- Push button katup 3/2 Normaly Contact
- Katup 5/2 dengan pilot pneumatik dengan spring return
- Silinder kerja ganda
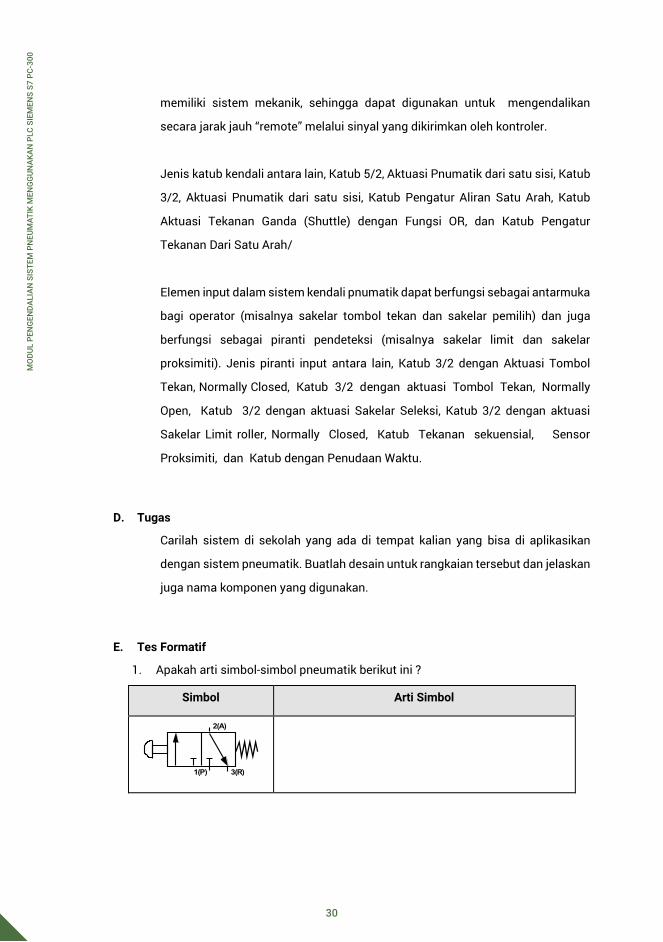
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
30
2(A)
3(R)1(P)
2(A)
3(R)1(P)
2(A)
3(R)1(P)
1(P)
2(B)
3(S)
4(A)
5(R)
1(P)
2(B)
3(S)
4(A)
5(R)
1(P)
2(B)
3(S)
4(A)
5(R)
2. Sebutkan jenis katup / valve pengendali !
3. Ada berapa jenis actuator pneumatik dilihat dari penggerakknya?
4. Jelaskan prinsip kerja silinder single acting
5. Apa saja jenis pilot yang digunakan pada katup / valve ?
memiliki sistem mekanik, sehingga dapat digunakan untuk mengendalikan
secara jarak jauh “remote” melalui sinyal yang dikirimkan oleh kontroler.
Jenis katub kendali antara lain, Katub 5/2, Aktuasi Pnumatik dari satu sisi, Katub
3/2, Aktuasi Pnumatik dari satu sisi, Katub Pengatur Aliran Satu Arah, Katub
Aktuasi Tekanan Ganda (Shuttle) dengan Fungsi OR, dan Katub Pengatur
Tekanan Dari Satu Arah/
Elemen input dalam sistem kendali pnumatik dapat berfungsi sebagai antarmuka
bagi operator (misalnya sakelar tombol tekan dan sakelar pemilih) dan juga
berfungsi sebagai piranti pendeteksi (misalnya sakelar limit dan sakelar
proksimiti). Jenis piranti input antara lain, Katub 3/2 dengan Aktuasi Tombol
Tekan, Normally Closed, Katub 3/2 dengan aktuasi Tombol Tekan, Normally
Open, Katub 3/2 dengan aktuasi Sakelar Seleksi, Katub 3/2 dengan aktuasi
Sakelar Limit roller, Normally Closed, Katub Tekanan sekuensial, Sensor
Proksimiti, dan Katub dengan Penudaan Waktu.
Carilah sistem di sekolah yang ada di tempat kalian yang bisa di aplikasikan
dengan sistem pneumatik. Buatlah desain untuk rangkaian tersebut dan jelaskan
juga nama komponen yang digunakan.
1. Apakah arti simbol-simbol pneumatik berikut ini ?
2(A)
3(R)1(P)
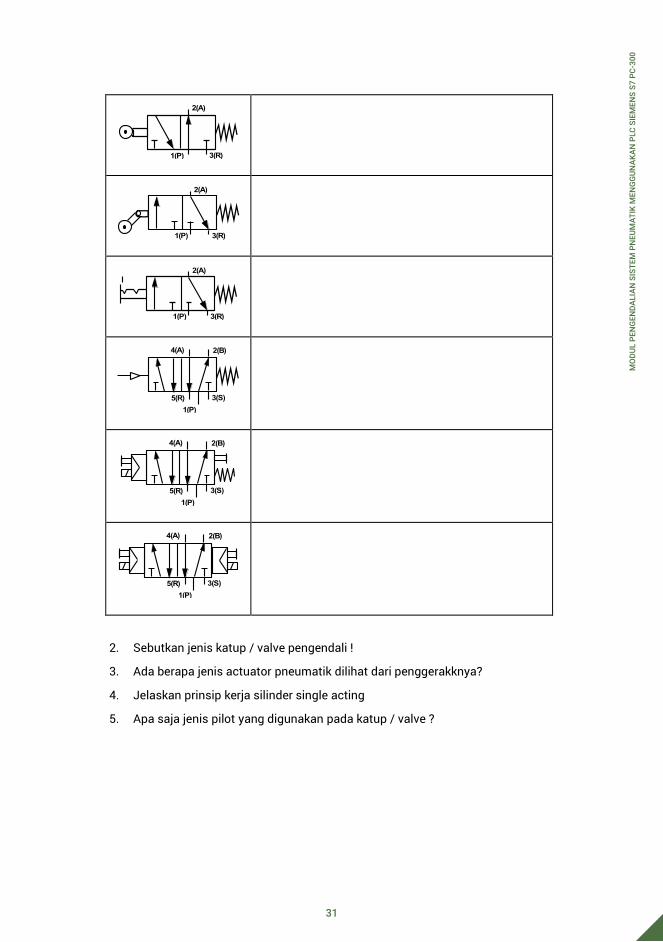
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
31
2(A)
3(R)1(P)
2(A)
3(R)1(P)
2(A)
3(R)1(P)
1(P)
2(B)
3(S)
4(A)
5(R)
1(P)
2(B)
3(S)
4(A)
5(R)
1(P)
2(B)
3(S)
4(A)
5(R)
2. Sebutkan jenis katup / valve pengendali !
3. Ada berapa jenis actuator pneumatik dilihat dari penggerakknya?
4. Jelaskan prinsip kerja silinder single acting
5. Apa saja jenis pilot yang digunakan pada katup / valve ?
memiliki sistem mekanik, sehingga dapat digunakan untuk mengendalikan
secara jarak jauh “remote” melalui sinyal yang dikirimkan oleh kontroler.
Jenis katub kendali antara lain, Katub 5/2, Aktuasi Pnumatik dari satu sisi, Katub
3/2, Aktuasi Pnumatik dari satu sisi, Katub Pengatur Aliran Satu Arah, Katub
Aktuasi Tekanan Ganda (Shuttle) dengan Fungsi OR, dan Katub Pengatur
Tekanan Dari Satu Arah/
Elemen input dalam sistem kendali pnumatik dapat berfungsi sebagai antarmuka
bagi operator (misalnya sakelar tombol tekan dan sakelar pemilih) dan juga
berfungsi sebagai piranti pendeteksi (misalnya sakelar limit dan sakelar
proksimiti). Jenis piranti input antara lain, Katub 3/2 dengan Aktuasi Tombol
Tekan, Normally Closed, Katub 3/2 dengan aktuasi Tombol Tekan, Normally
Open, Katub 3/2 dengan aktuasi Sakelar Seleksi, Katub 3/2 dengan aktuasi
Sakelar Limit roller, Normally Closed, Katub Tekanan sekuensial, Sensor
Proksimiti, dan Katub dengan Penudaan Waktu.
Carilah sistem di sekolah yang ada di tempat kalian yang bisa di aplikasikan
dengan sistem pneumatik. Buatlah desain untuk rangkaian tersebut dan jelaskan
juga nama komponen yang digunakan.
1. Apakah arti simbol-simbol pneumatik berikut ini ?
2(A)
3(R)1(P)
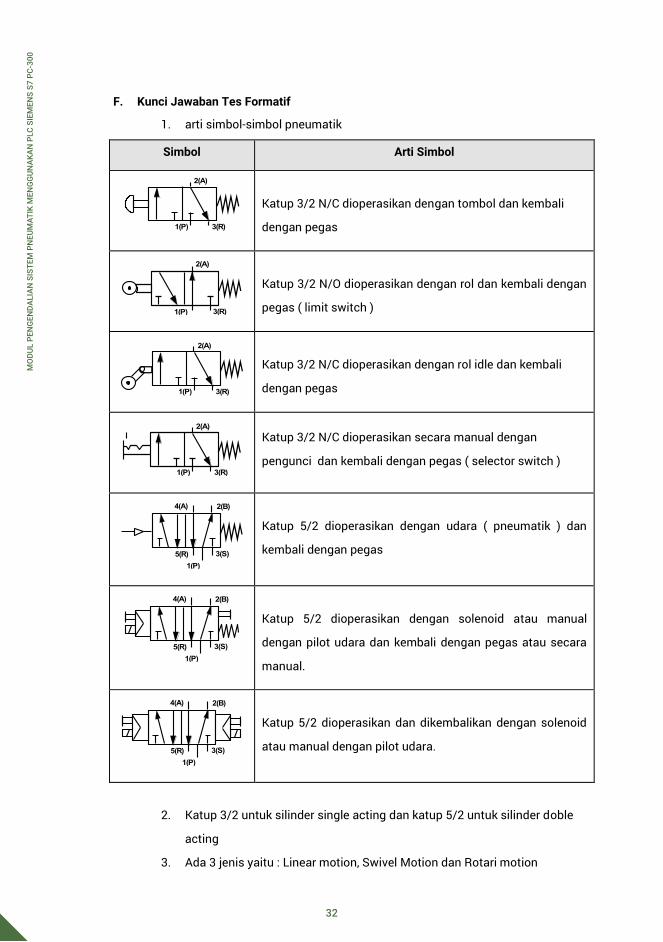
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
32
1. arti simbol-simbol pneumatik
2(A)
3(R)1(P)
Katup 3/2 N/C dioperasikan dengan tombol dan kembali
dengan pegas
2(A)
3(R)1(P)
Katup 3/2 N/O dioperasikan dengan rol dan kembali dengan
pegas ( limit switch )
2(A)
3(R)1(P)
Katup 3/2 N/C dioperasikan dengan rol idle dan kembali
dengan pegas
2(A)
3(R)1(P)
Katup 3/2 N/C dioperasikan secara manual dengan
pengunci dan kembali dengan pegas ( selector switch )
1(P)
2(B)
3(S)
4(A)
5(R)
Katup 5/2 dioperasikan dengan udara ( pneumatik ) dan
kembali dengan pegas
1(P)
2(B)
3(S)
4(A)
5(R)
Katup 5/2 dioperasikan dengan solenoid atau manual
dengan pilot udara dan kembali dengan pegas atau secara
manual.
1(P)
2(B)
3(S)
4(A)
5(R)
Katup 5/2 dioperasikan dan dikembalikan dengan solenoid
atau manual dengan pilot udara.
2. Katup 3/2 untuk silinder single acting dan katup 5/2 untuk silinder doble
acting
3. Ada 3 jenis yaitu : Linear motion, Swivel Motion dan Rotari motion
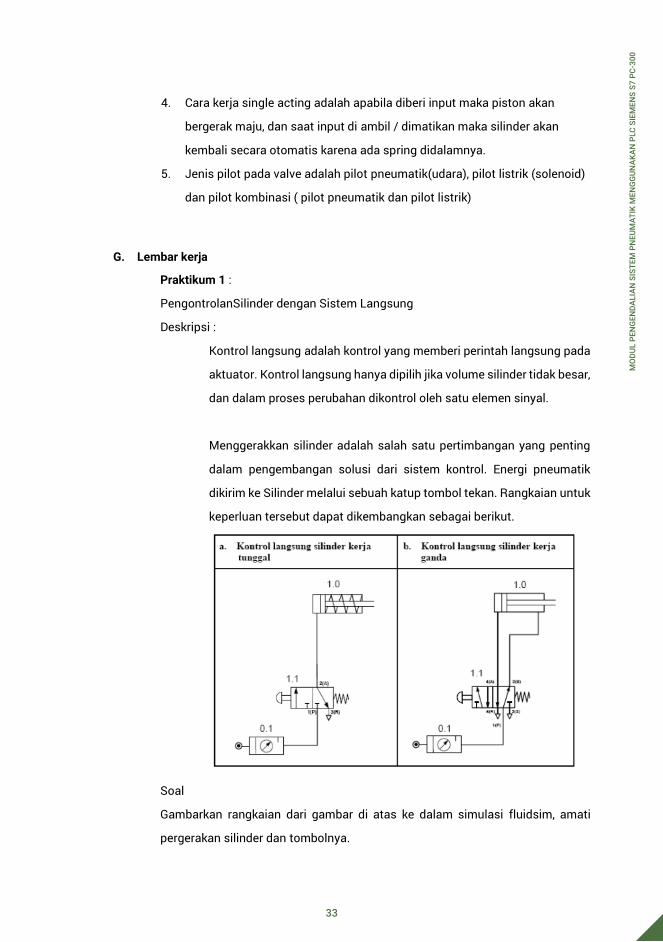
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
33
4. Cara kerja single acting adalah apabila diberi input maka piston akan
bergerak maju, dan saat input di ambil / dimatikan maka silinder akan
kembali secara otomatis karena ada spring didalamnya.
5. Jenis pilot pada valve adalah pilot pneumatik(udara), pilot listrik (solenoid)
dan pilot kombinasi ( pilot pneumatik dan pilot listrik)
:
PengontrolanSilinder dengan Sistem Langsung
Deskripsi :
Kontrol langsung adalah kontrol yang memberi perintah langsung pada
aktuator. Kontrol langsung hanya dipilih jika volume silinder tidak besar,
dan dalam proses perubahan dikontrol oleh satu elemen sinyal.
Menggerakkan silinder adalah salah satu pertimbangan yang penting
dalam pengembangan solusi dari sistem kontrol. Energi pneumatik
dikirim ke Silinder melalui sebuah katup tombol tekan. Rangkaian untuk
keperluan tersebut dapat dikembangkan sebagai berikut.
Soal
Gambarkan rangkaian dari gambar di atas ke dalam simulasi fluidsim, amati
pergerakan silinder dan tombolnya.
1. arti simbol-simbol pneumatik
2(A)
3(R)1(P)
Katup 3/2 N/C dioperasikan dengan tombol dan kembali
dengan pegas
2(A)
3(R)1(P)
Katup 3/2 N/O dioperasikan dengan rol dan kembali dengan
pegas ( limit switch )
2(A)
3(R)1(P)
Katup 3/2 N/C dioperasikan dengan rol idle dan kembali
dengan pegas
2(A)
3(R)1(P)
Katup 3/2 N/C dioperasikan secara manual dengan
pengunci dan kembali dengan pegas ( selector switch )
1(P)
2(B)
3(S)
4(A)
5(R)
Katup 5/2 dioperasikan dengan udara ( pneumatik ) dan
kembali dengan pegas
1(P)
2(B)
3(S)
4(A)
5(R)
Katup 5/2 dioperasikan dengan solenoid atau manual
dengan pilot udara dan kembali dengan pegas atau secara
manual.
1(P)
2(B)
3(S)
4(A)
5(R)
Katup 5/2 dioperasikan dan dikembalikan dengan solenoid
atau manual dengan pilot udara.
2. Katup 3/2 untuk silinder single acting dan katup 5/2 untuk silinder doble
acting
3. Ada 3 jenis yaitu : Linear motion, Swivel Motion dan Rotari motion
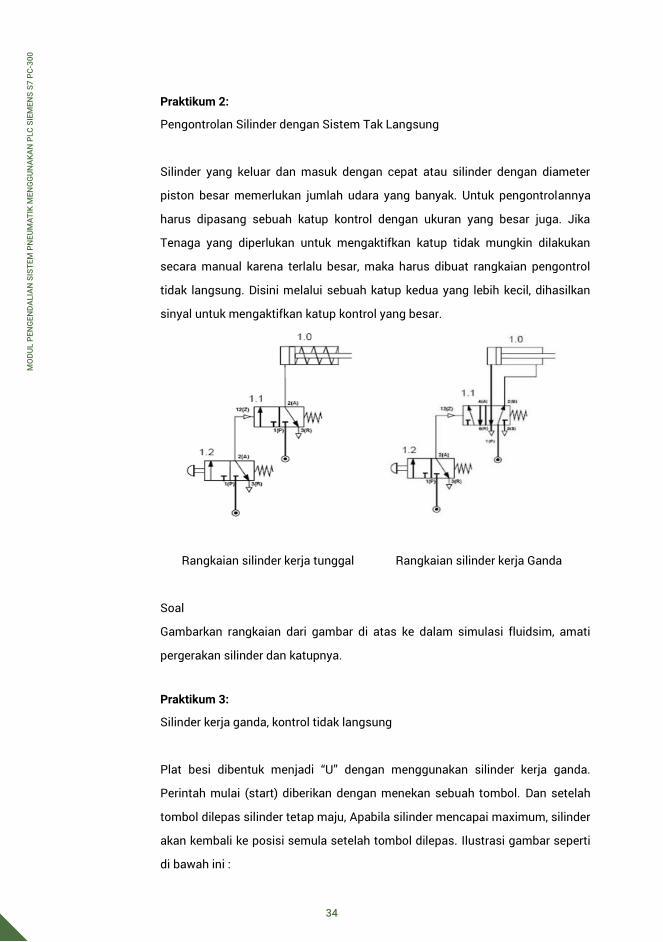
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
34
Pengontrolan Silinder dengan Sistem Tak Langsung
Silinder yang keluar dan masuk dengan cepat atau silinder dengan diameter
piston besar memerlukan jumlah udara yang banyak. Untuk pengontrolannya
harus dipasang sebuah katup kontrol dengan ukuran yang besar juga. Jika
Tenaga yang diperlukan untuk mengaktifkan katup tidak mungkin dilakukan
secara manual karena terlalu besar, maka harus dibuat rangkaian pengontrol
tidak langsung. Disini melalui sebuah katup kedua yang lebih kecil, dihasilkan
sinyal untuk mengaktifkan katup kontrol yang besar.
Rangkaian silinder kerja tunggal
Rangkaian silinder kerja Ganda
Soal
Gambarkan rangkaian dari gambar di atas ke dalam simulasi fluidsim, amati
pergerakan silinder dan katupnya.
Silinder kerja ganda, kontrol tidak langsung
Plat besi dibentuk menjadi “U” dengan menggunakan silinder kerja ganda.
Perintah mulai (start) diberikan dengan menekan sebuah tombol. Dan setelah
tombol dilepas silinder tetap maju, Apabila silinder mencapai maximum, silinder
akan kembali ke posisi semula setelah tombol dilepas. Ilustrasi gambar seperti
di bawah ini :
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
35
Soal :
1. Gambarkan rangkaiannya pada simulasi fluidsim.
2. Tuliskan komponen yang dibutuhkan dan cara kerjanya.
1. Peserta didik dapat mengidentifikasi kontrol elektropneumatik
2. Peserta didik dapat mengenal simbol pneumatik dan elektrik pada sistem
elektropneumatik
3. Peserta didik dapat membaca dan membuat diagram kontrol
elektropneumatik.
4. Peserta didik dapat membuat rancangan sederhana sistem kontrol
elektropneumatik.
2.1.1. Sakelar pengendali
Sakelar pengendali adalah elemen masukan yang berfungsi untuk menghubungkan
atau memutuskan rangkaian listrik. Untuk memahami sakelar pengendali perlu kita
kenal dulu adalah kontak-kontaknya, karena bagian inilah yang berfungsi
menghubungkan atau memutus rangkaian. Di dalam sistem elektropneumatik yang
Pengontrolan Silinder dengan Sistem Tak Langsung
Silinder yang keluar dan masuk dengan cepat atau silinder dengan diameter
piston besar memerlukan jumlah udara yang banyak. Untuk pengontrolannya
harus dipasang sebuah katup kontrol dengan ukuran yang besar juga. Jika
Tenaga yang diperlukan untuk mengaktifkan katup tidak mungkin dilakukan
secara manual karena terlalu besar, maka harus dibuat rangkaian pengontrol
tidak langsung. Disini melalui sebuah katup kedua yang lebih kecil, dihasilkan
sinyal untuk mengaktifkan katup kontrol yang besar.
Rangkaian silinder kerja tunggal
Rangkaian silinder kerja Ganda
Soal
Gambarkan rangkaian dari gambar di atas ke dalam simulasi fluidsim, amati
pergerakan silinder dan katupnya.
Silinder kerja ganda, kontrol tidak langsung
Plat besi dibentuk menjadi “U” dengan menggunakan silinder kerja ganda.
Perintah mulai (start) diberikan dengan menekan sebuah tombol. Dan setelah
tombol dilepas silinder tetap maju, Apabila silinder mencapai maximum, silinder
akan kembali ke posisi semula setelah tombol dilepas. Ilustrasi gambar seperti
di bawah ini :
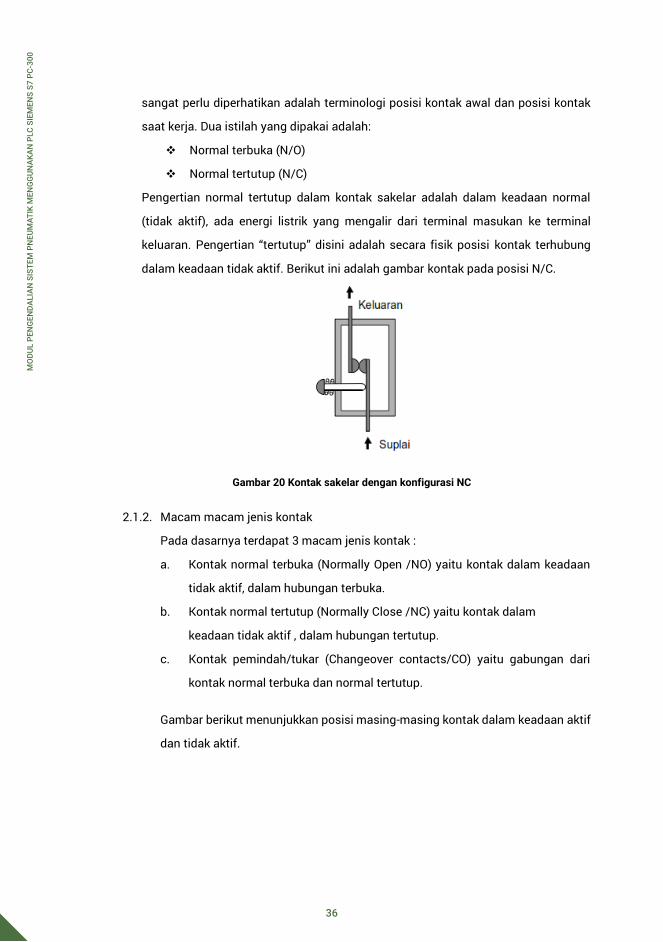
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
36
sangat perlu diperhatikan adalah terminologi posisi kontak awal dan posisi kontak
saat kerja. Dua istilah yang dipakai adalah:
Normal terbuka (N/O)
Normal tertutup (N/C)
Pengertian normal tertutup dalam kontak sakelar adalah dalam keadaan normal
(tidak aktif), ada energi listrik yang mengalir dari terminal masukan ke terminal
keluaran. Pengertian “tertutup” disini adalah secara fisik posisi kontak terhubung
dalam keadaan tidak aktif. Berikut ini adalah gambar kontak pada posisi N/C.
2.1.2. Macam macam jenis kontak
Pada dasarnya terdapat 3 macam jenis kontak :
a. Kontak normal terbuka (Normally Open /NO) yaitu kontak dalam keadaan
tidak aktif, dalam hubungan terbuka.
b. Kontak normal tertutup (Normally Close /NC) yaitu kontak dalam
keadaan tidak aktif , dalam hubungan tertutup.
c. Kontak pemindah/tukar (Changeover contacts/CO) yaitu gabungan dari
kontak normal terbuka dan normal tertutup.
Gambar berikut menunjukkan posisi masing-masing kontak dalam keadaan aktif
dan tidak aktif.
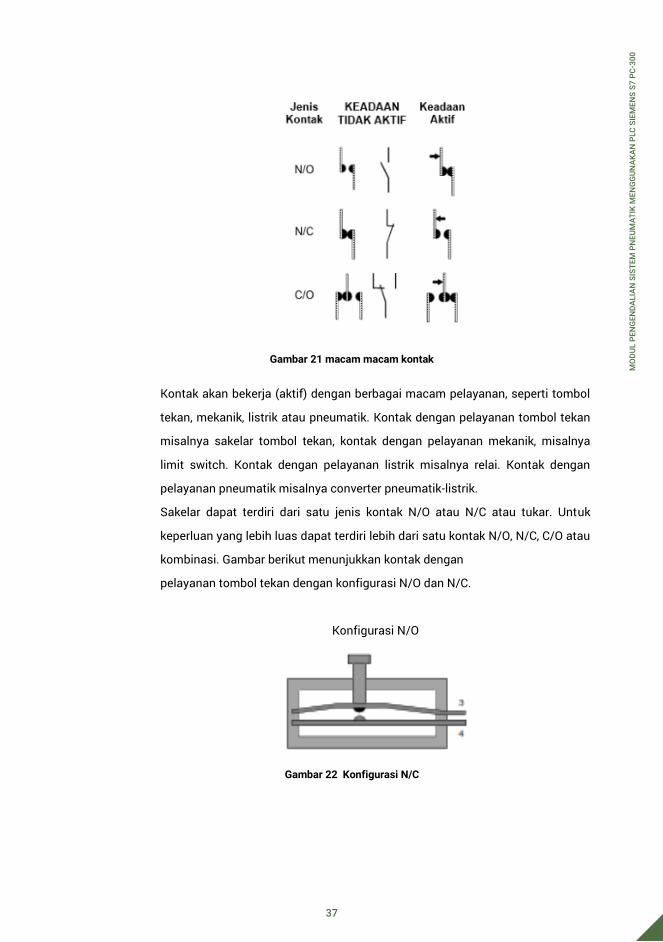
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
37
Kontak akan bekerja (aktif) dengan berbagai macam pelayanan, seperti tombol
tekan, mekanik, listrik atau pneumatik. Kontak dengan pelayanan tombol tekan
misalnya sakelar tombol tekan, kontak dengan pelayanan mekanik, misalnya
limit switch. Kontak dengan pelayanan listrik misalnya relai. Kontak dengan
pelayanan pneumatik misalnya converter pneumatik-listrik.
Sakelar dapat terdiri dari satu jenis kontak N/O atau N/C atau tukar. Untuk
keperluan yang lebih luas dapat terdiri lebih dari satu kontak N/O, N/C, C/O atau
kombinasi. Gambar berikut menunjukkan kontak dengan
pelayanan tombol tekan dengan konfigurasi N/O dan N/C.
Konfigurasi N/O
sangat perlu diperhatikan adalah terminologi posisi kontak awal dan posisi kontak
saat kerja. Dua istilah yang dipakai adalah:
Normal terbuka (N/O)
Normal tertutup (N/C)
Pengertian normal tertutup dalam kontak sakelar adalah dalam keadaan normal
(tidak aktif), ada energi listrik yang mengalir dari terminal masukan ke terminal
keluaran. Pengertian “tertutup” disini adalah secara fisik posisi kontak terhubung
dalam keadaan tidak aktif. Berikut ini adalah gambar kontak pada posisi N/C.
2.1.2. Macam macam jenis kontak
Pada dasarnya terdapat 3 macam jenis kontak :
a. Kontak normal terbuka (Normally Open /NO) yaitu kontak dalam keadaan
tidak aktif, dalam hubungan terbuka.
b. Kontak normal tertutup (Normally Close /NC) yaitu kontak dalam
keadaan tidak aktif , dalam hubungan tertutup.
c. Kontak pemindah/tukar (Changeover contacts/CO) yaitu gabungan dari
kontak normal terbuka dan normal tertutup.
Gambar berikut menunjukkan posisi masing-masing kontak dalam keadaan aktif
dan tidak aktif.
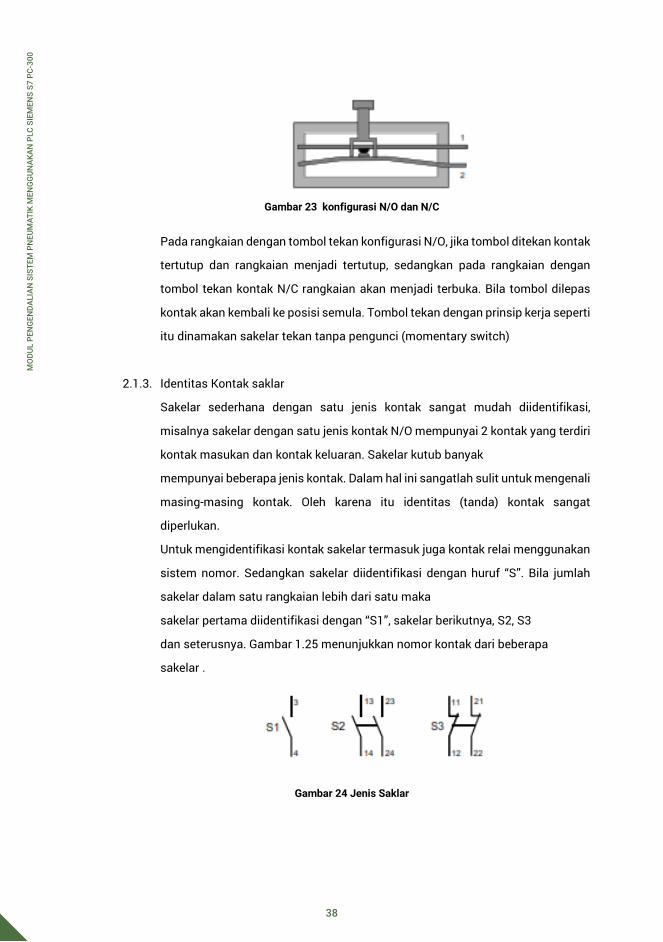
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
38
Pada rangkaian dengan tombol tekan konfigurasi N/O, jika tombol ditekan kontak
tertutup dan rangkaian menjadi tertutup, sedangkan pada rangkaian dengan
tombol tekan kontak N/C rangkaian akan menjadi terbuka. Bila tombol dilepas
kontak akan kembali ke posisi semula. Tombol tekan dengan prinsip kerja seperti
itu dinamakan sakelar tekan tanpa pengunci (momentary switch)
2.1.3. Identitas Kontak saklar
Sakelar sederhana dengan satu jenis kontak sangat mudah diidentifikasi,
misalnya sakelar dengan satu jenis kontak N/O mempunyai 2 kontak yang terdiri
kontak masukan dan kontak keluaran. Sakelar kutub banyak
mempunyai beberapa jenis kontak. Dalam hal ini sangatlah sulit untuk mengenali
masing-masing kontak. Oleh karena itu identitas (tanda) kontak sangat
diperlukan.
Untuk mengidentifikasi kontak sakelar termasuk juga kontak relai menggunakan
sistem nomor. Sedangkan sakelar diidentifikasi dengan huruf “S”. Bila jumlah
sakelar dalam satu rangkaian lebih dari satu maka
sakelar pertama diidentifikasi dengan “S1”, sakelar berikutnya, S2, S3
dan seterusnya. Gambar 1.25 menunjukkan nomor kontak dari beberapa
sakelar .
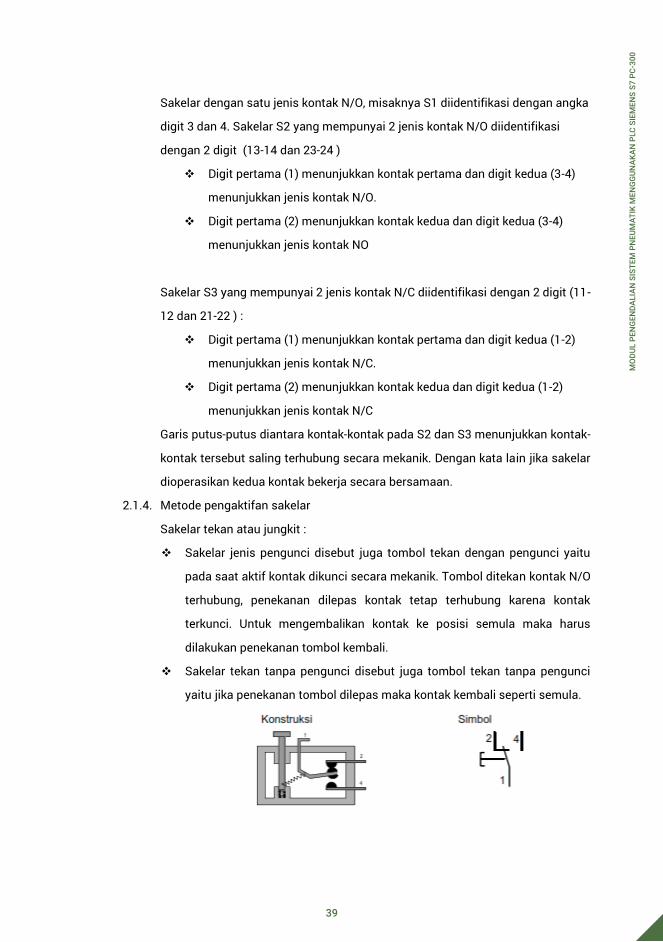
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
39
Sakelar dengan satu jenis kontak N/O, misaknya S1 diidentifikasi dengan angka
digit 3 dan 4. Sakelar S2 yang mempunyai 2 jenis kontak N/O diidentifikasi
dengan 2 digit (13-14 dan 23-24 )
Digit pertama (1) menunjukkan kontak pertama dan digit kedua (3-4)
menunjukkan jenis kontak N/O.
Digit pertama (2) menunjukkan kontak kedua dan digit kedua (3-4)
menunjukkan jenis kontak NO
Sakelar S3 yang mempunyai 2 jenis kontak N/C diidentifikasi dengan 2 digit (11-
12 dan 21-22 ) :
Digit pertama (1) menunjukkan kontak pertama dan digit kedua (1-2)
menunjukkan jenis kontak N/C.
Digit pertama (2) menunjukkan kontak kedua dan digit kedua (1-2)
menunjukkan jenis kontak N/C
Garis putus-putus diantara kontak-kontak pada S2 dan S3 menunjukkan kontak-
kontak tersebut saling terhubung secara mekanik. Dengan kata lain jika sakelar
dioperasikan kedua kontak bekerja secara bersamaan.
2.1.4. Metode pengaktifan sakelar
Sakelar tekan atau jungkit :
Sakelar jenis pengunci disebut juga tombol tekan dengan pengunci yaitu
pada saat aktif kontak dikunci secara mekanik. Tombol ditekan kontak N/O
terhubung, penekanan dilepas kontak tetap terhubung karena kontak
terkunci. Untuk mengembalikan kontak ke posisi semula maka harus
dilakukan penekanan tombol kembali.
Sakelar tekan tanpa pengunci disebut juga tombol tekan tanpa pengunci
yaitu jika penekanan tombol dilepas maka kontak kembali seperti semula.
Pada rangkaian dengan tombol tekan konfigurasi N/O, jika tombol ditekan kontak
tertutup dan rangkaian menjadi tertutup, sedangkan pada rangkaian dengan
tombol tekan kontak N/C rangkaian akan menjadi terbuka. Bila tombol dilepas
kontak akan kembali ke posisi semula. Tombol tekan dengan prinsip kerja seperti
itu dinamakan sakelar tekan tanpa pengunci (momentary switch)
2.1.3. Identitas Kontak saklar
Sakelar sederhana dengan satu jenis kontak sangat mudah diidentifikasi,
misalnya sakelar dengan satu jenis kontak N/O mempunyai 2 kontak yang terdiri
kontak masukan dan kontak keluaran. Sakelar kutub banyak
mempunyai beberapa jenis kontak. Dalam hal ini sangatlah sulit untuk mengenali
masing-masing kontak. Oleh karena itu identitas (tanda) kontak sangat
diperlukan.
Untuk mengidentifikasi kontak sakelar termasuk juga kontak relai menggunakan
sistem nomor. Sedangkan sakelar diidentifikasi dengan huruf “S”. Bila jumlah
sakelar dalam satu rangkaian lebih dari satu maka
sakelar pertama diidentifikasi dengan “S1”, sakelar berikutnya, S2, S3
dan seterusnya. Gambar 1.25 menunjukkan nomor kontak dari beberapa
sakelar .
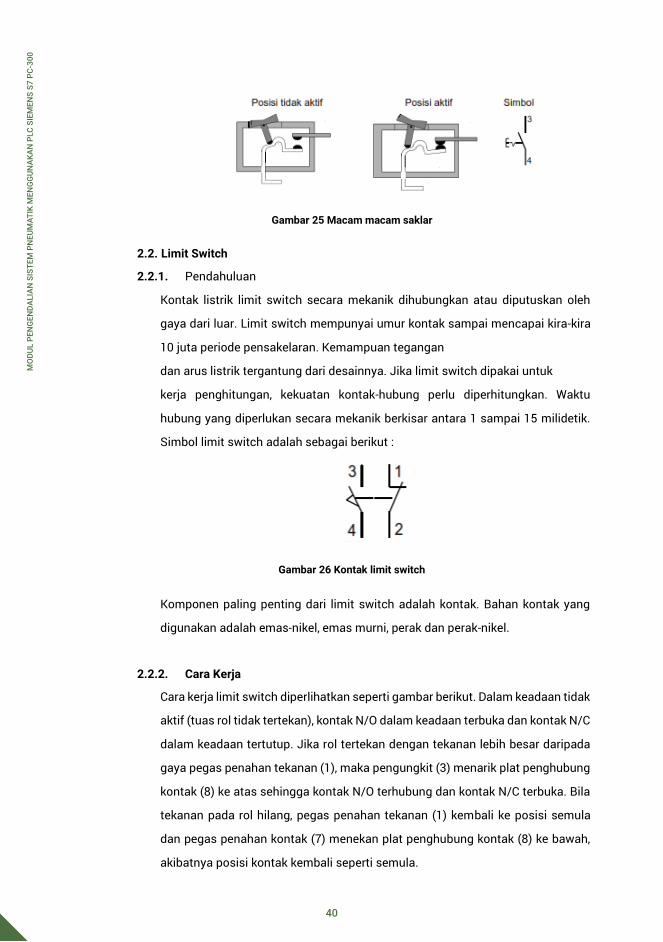
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
40
Pendahuluan
Kontak listrik limit switch secara mekanik dihubungkan atau diputuskan oleh
gaya dari luar. Limit switch mempunyai umur kontak sampai mencapai kira-kira
10 juta periode pensakelaran. Kemampuan tegangan
dan arus listrik tergantung dari desainnya. Jika limit switch dipakai untuk
kerja penghitungan, kekuatan kontak-hubung perlu diperhitungkan. Waktu
hubung yang diperlukan secara mekanik berkisar antara 1 sampai 15 milidetik.
Simbol limit switch adalah sebagai berikut :
Komponen paling penting dari limit switch adalah kontak. Bahan kontak yang
digunakan adalah emas-nikel, emas murni, perak dan perak-nikel.
Cara kerja limit switch diperlihatkan seperti gambar berikut. Dalam keadaan tidak
aktif (tuas rol tidak tertekan), kontak N/O dalam keadaan terbuka dan kontak N/C
dalam keadaan tertutup. Jika rol tertekan dengan tekanan lebih besar daripada
gaya pegas penahan tekanan (1), maka pengungkit (3) menarik plat penghubung
kontak (8) ke atas sehingga kontak N/O terhubung dan kontak N/C terbuka. Bila
tekanan pada rol hilang, pegas penahan tekanan (1) kembali ke posisi semula
dan pegas penahan kontak (7) menekan plat penghubung kontak (8) ke bawah,
akibatnya posisi kontak kembali seperti semula.
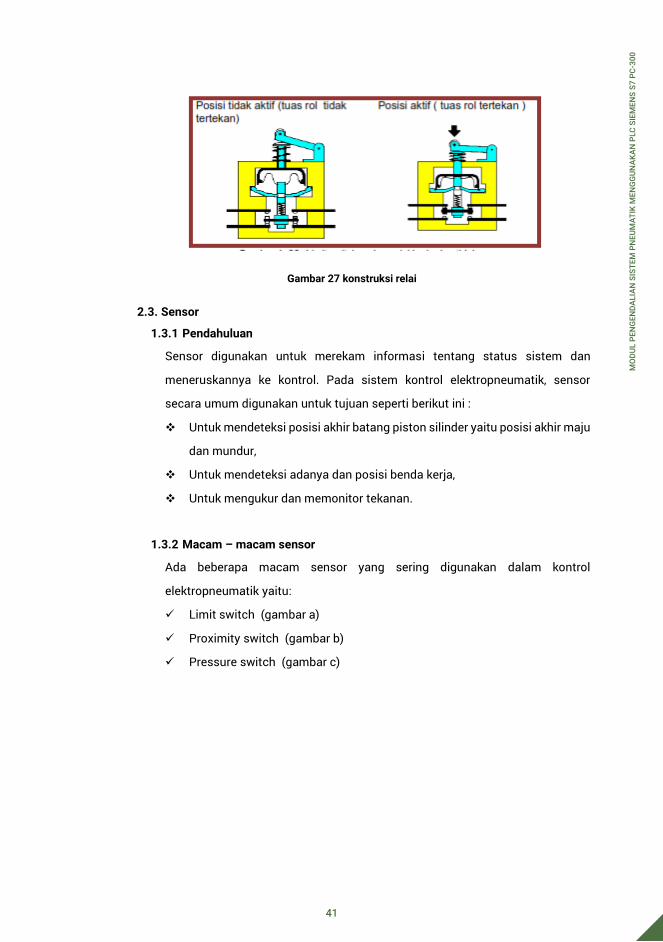
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
41
Sensor digunakan untuk merekam informasi tentang status sistem dan
meneruskannya ke kontrol. Pada sistem kontrol elektropneumatik, sensor
secara umum digunakan untuk tujuan seperti berikut ini :
Untuk mendeteksi posisi akhir batang piston silinder yaitu posisi akhir maju
dan mundur,
Untuk mendeteksi adanya dan posisi benda kerja,
Untuk mengukur dan memonitor tekanan.
–
Ada beberapa macam sensor yang sering digunakan dalam kontrol
elektropneumatik yaitu:
Limit switch (gambar a)
Proximity switch (gambar b)
Pressure switch (gambar c)
Pendahuluan
Kontak listrik limit switch secara mekanik dihubungkan atau diputuskan oleh
gaya dari luar. Limit switch mempunyai umur kontak sampai mencapai kira-kira
10 juta periode pensakelaran. Kemampuan tegangan
dan arus listrik tergantung dari desainnya. Jika limit switch dipakai untuk
kerja penghitungan, kekuatan kontak-hubung perlu diperhitungkan. Waktu
hubung yang diperlukan secara mekanik berkisar antara 1 sampai 15 milidetik.
Simbol limit switch adalah sebagai berikut :
Komponen paling penting dari limit switch adalah kontak. Bahan kontak yang
digunakan adalah emas-nikel, emas murni, perak dan perak-nikel.
Cara kerja limit switch diperlihatkan seperti gambar berikut. Dalam keadaan tidak
aktif (tuas rol tidak tertekan), kontak N/O dalam keadaan terbuka dan kontak N/C
dalam keadaan tertutup. Jika rol tertekan dengan tekanan lebih besar daripada
gaya pegas penahan tekanan (1), maka pengungkit (3) menarik plat penghubung
kontak (8) ke atas sehingga kontak N/O terhubung dan kontak N/C terbuka. Bila
tekanan pada rol hilang, pegas penahan tekanan (1) kembali ke posisi semula
dan pegas penahan kontak (7) menekan plat penghubung kontak (8) ke bawah,
akibatnya posisi kontak kembali seperti semula.

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
42
–
1. Proximity switch
Sangat berbeda dengan limit switch, proximity switch beroperasi tanpa
sentuhan (non contact switching) dan tanpa gaya mekanik dari luar. Ada
beberapa macam proximity switch yaitu :
a. Reed switch
b. Induktive proximity switch
c. Capasitive proximity switch
d. Optical proximity switch
Reed switch adalah proximity switch yang dioperasikan secara magnetik. Ia
terdiri dari dua kontak buluh (reed) dalam tabung gelas yang diisi gas. Reed
switch dipasang langsung pada rumah silinder. Ia diaktifkan oleh cincin
magnetik yang ada pada piston silinder. Jika cincin magnet bergerak tepat pada
reed switch menyebabkan kontak menutup akibat dari medan magnet dan arus
listrik dapat mengalir melaluinya. Pada umumnya reed switch mempunyai
kontak normal terbuka (N/O). Dalam pemakaian industri, reed switch dilengkapi
dengan lampu tanda LED.
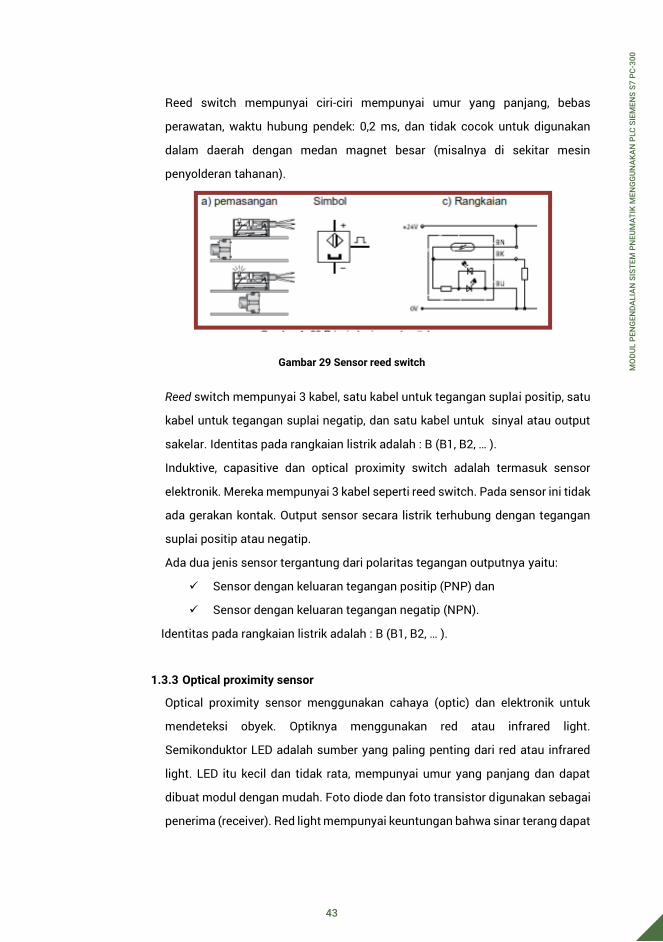
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
43
Reed switch mempunyai ciri-ciri mempunyai umur yang panjang, bebas
perawatan, waktu hubung pendek: 0,2 ms, dan tidak cocok untuk digunakan
dalam daerah dengan medan magnet besar (misalnya di sekitar mesin
penyolderan tahanan).
Reed switch mempunyai 3 kabel, satu kabel untuk tegangan suplai positip, satu
kabel untuk tegangan suplai negatip, dan satu kabel untuk sinyal atau output
sakelar. Identitas pada rangkaian listrik adalah : B (B1, B2, … ).
Induktive, capasitive dan optical proximity switch adalah termasuk sensor
elektronik. Mereka mempunyai 3 kabel seperti reed switch. Pada sensor ini tidak
ada gerakan kontak. Output sensor secara listrik terhubung dengan tegangan
suplai positip atau negatip.
Ada dua jenis sensor tergantung dari polaritas tegangan outputnya yaitu:
Sensor dengan keluaran tegangan positip (PNP) dan
Sensor dengan keluaran tegangan negatip (NPN).
Identitas pada rangkaian listrik adalah : B (B1, B2, … ).
Optical proximity sensor menggunakan cahaya (optic) dan elektronik untuk
mendeteksi obyek. Optiknya menggunakan red atau infrared light.
Semikonduktor LED adalah sumber yang paling penting dari red atau infrared
light. LED itu kecil dan tidak rata, mempunyai umur yang panjang dan dapat
dibuat modul dengan mudah. Foto diode dan foto transistor digunakan sebagai
penerima (receiver). Red light mempunyai keuntungan bahwa sinar terang dapat
–
1. Proximity switch
Sangat berbeda dengan limit switch, proximity switch beroperasi tanpa
sentuhan (non contact switching) dan tanpa gaya mekanik dari luar. Ada
beberapa macam proximity switch yaitu :
a. Reed switch
b. Induktive proximity switch
c. Capasitive proximity switch
d. Optical proximity switch
Reed switch adalah proximity switch yang dioperasikan secara magnetik. Ia
terdiri dari dua kontak buluh (reed) dalam tabung gelas yang diisi gas. Reed
switch dipasang langsung pada rumah silinder. Ia diaktifkan oleh cincin
magnetik yang ada pada piston silinder. Jika cincin magnet bergerak tepat pada
reed switch menyebabkan kontak menutup akibat dari medan magnet dan arus
listrik dapat mengalir melaluinya. Pada umumnya reed switch mempunyai
kontak normal terbuka (N/O). Dalam pemakaian industri, reed switch dilengkapi
dengan lampu tanda LED.
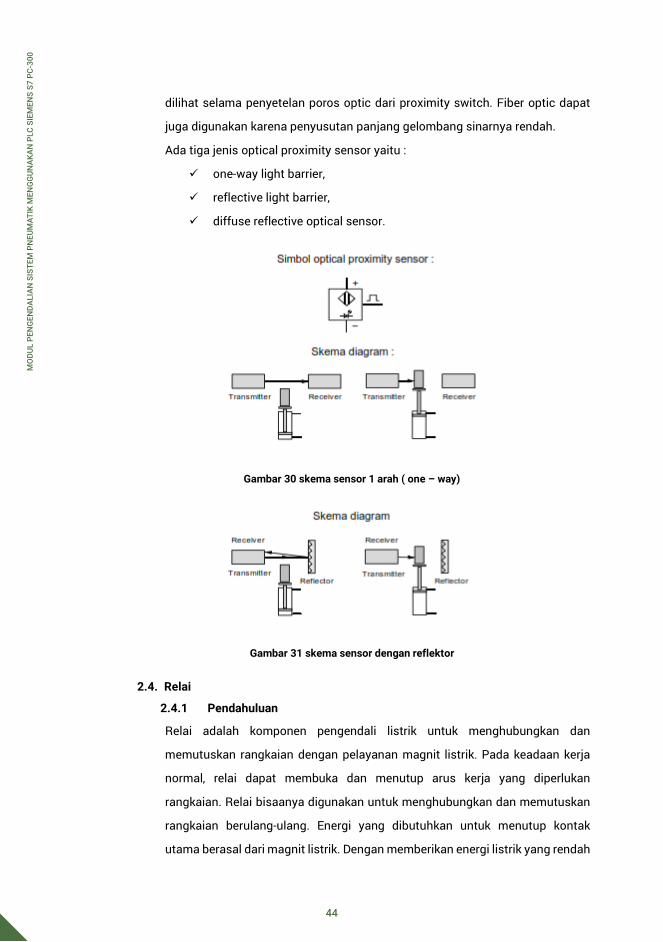
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
44
dilihat selama penyetelan poros optic dari proximity switch. Fiber optic dapat
juga digunakan karena penyusutan panjang gelombang sinarnya rendah.
Ada tiga jenis optical proximity sensor yaitu :
one-way light barrier,
reflective light barrier,
diffuse reflective optical sensor.
–
Relai adalah komponen pengendali listrik untuk menghubungkan dan
memutuskan rangkaian dengan pelayanan magnit listrik. Pada keadaan kerja
normal, relai dapat membuka dan menutup arus kerja yang diperlukan
rangkaian. Relai bisaanya digunakan untuk menghubungkan dan memutuskan
rangkaian berulang-ulang. Energi yang dibutuhkan untuk menutup kontak
utama berasal dari magnit listrik. Dengan memberikan energi listrik yang rendah
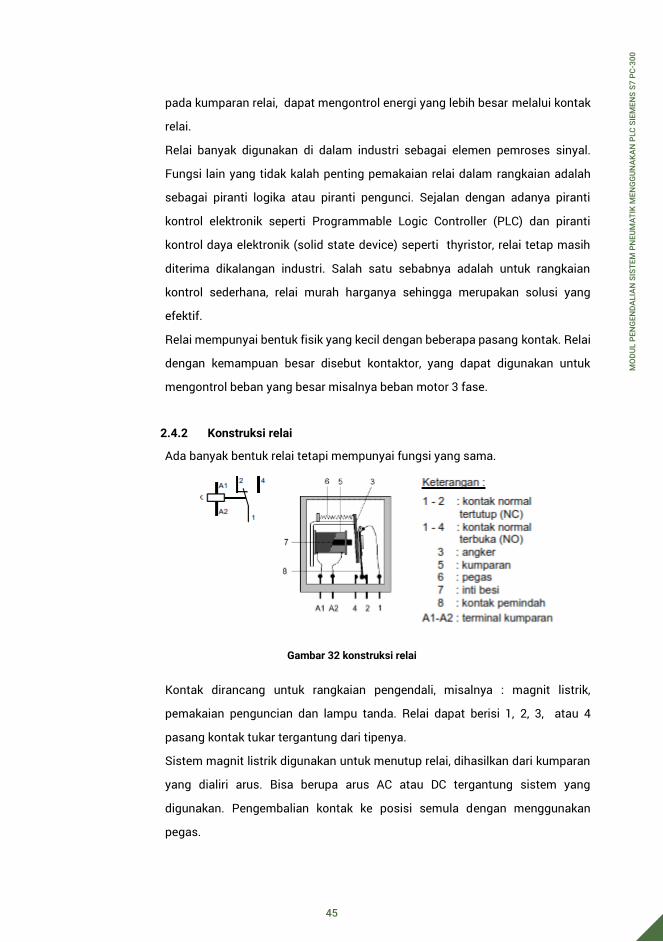
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
45
pada kumparan relai, dapat mengontrol energi yang lebih besar melalui kontak
relai.
Relai banyak digunakan di dalam industri sebagai elemen pemroses sinyal.
Fungsi lain yang tidak kalah penting pemakaian relai dalam rangkaian adalah
sebagai piranti logika atau piranti pengunci. Sejalan dengan adanya piranti
kontrol elektronik seperti Programmable Logic Controller (PLC) dan piranti
kontrol daya elektronik (solid state device) seperti thyristor, relai tetap masih
diterima dikalangan industri. Salah satu sebabnya adalah untuk rangkaian
kontrol sederhana, relai murah harganya sehingga merupakan solusi yang
efektif.
Relai mempunyai bentuk fisik yang kecil dengan beberapa pasang kontak. Relai
dengan kemampuan besar disebut kontaktor, yang dapat digunakan untuk
mengontrol beban yang besar misalnya beban motor 3 fase.
Ada banyak bentuk relai tetapi mempunyai fungsi yang sama.
Kontak dirancang untuk rangkaian pengendali, misalnya : magnit listrik,
pemakaian penguncian dan lampu tanda. Relai dapat berisi 1, 2, 3, atau 4
pasang kontak tukar tergantung dari tipenya.
Sistem magnit listrik digunakan untuk menutup relai, dihasilkan dari kumparan
yang dialiri arus. Bisa berupa arus AC atau DC tergantung sistem yang
digunakan. Pengembalian kontak ke posisi semula dengan menggunakan
pegas.
dilihat selama penyetelan poros optic dari proximity switch. Fiber optic dapat
juga digunakan karena penyusutan panjang gelombang sinarnya rendah.
Ada tiga jenis optical proximity sensor yaitu :
one-way light barrier,
reflective light barrier,
diffuse reflective optical sensor.
–
Relai adalah komponen pengendali listrik untuk menghubungkan dan
memutuskan rangkaian dengan pelayanan magnit listrik. Pada keadaan kerja
normal, relai dapat membuka dan menutup arus kerja yang diperlukan
rangkaian. Relai bisaanya digunakan untuk menghubungkan dan memutuskan
rangkaian berulang-ulang. Energi yang dibutuhkan untuk menutup kontak
utama berasal dari magnit listrik. Dengan memberikan energi listrik yang rendah
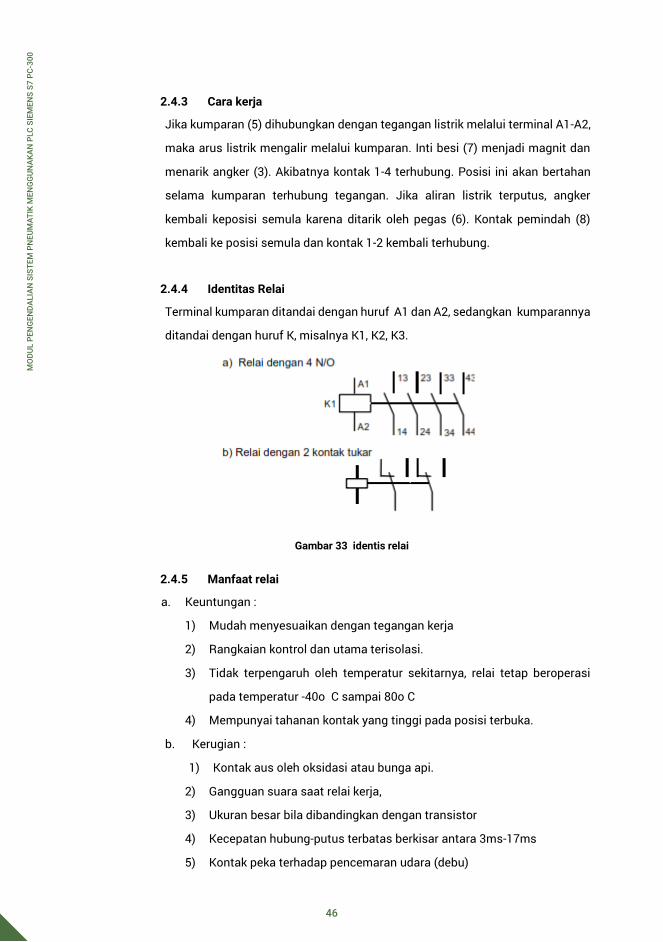
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
46
Jika kumparan (5) dihubungkan dengan tegangan listrik melalui terminal A1-A2,
maka arus listrik mengalir melalui kumparan. Inti besi (7) menjadi magnit dan
menarik angker (3). Akibatnya kontak 1-4 terhubung. Posisi ini akan bertahan
selama kumparan terhubung tegangan. Jika aliran listrik terputus, angker
kembali keposisi semula karena ditarik oleh pegas (6). Kontak pemindah (8)
kembali ke posisi semula dan kontak 1-2 kembali terhubung.
Terminal kumparan ditandai dengan huruf A1 dan A2, sedangkan kumparannya
ditandai dengan huruf K, misalnya K1, K2, K3.
a. Keuntungan :
1) Mudah menyesuaikan dengan tegangan kerja
2) Rangkaian kontrol dan utama terisolasi.
3) Tidak terpengaruh oleh temperatur sekitarnya, relai tetap beroperasi
pada temperatur -40o C sampai 80o C
4) Mempunyai tahanan kontak yang tinggi pada posisi terbuka.
b. Kerugian :
1) Kontak aus oleh oksidasi atau bunga api.
2) Gangguan suara saat relai kerja,
3) Ukuran besar bila dibandingkan dengan transistor
4) Kecepatan hubung-putus terbatas berkisar antara 3ms-17ms
5) Kontak peka terhadap pencemaran udara (debu)
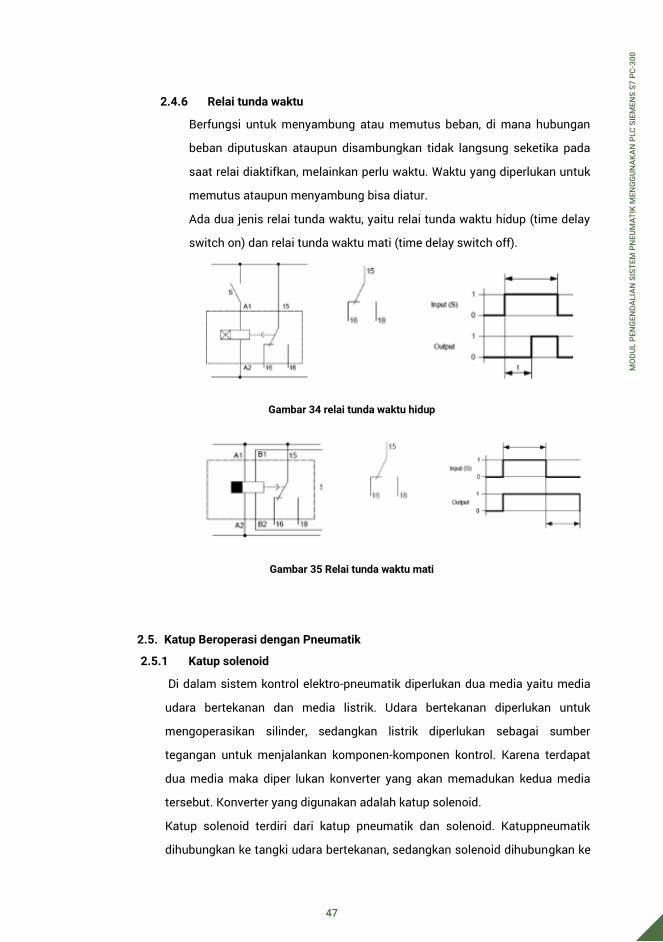
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
47
Berfungsi untuk menyambung atau memutus beban, di mana hubungan
beban diputuskan ataupun disambungkan tidak langsung seketika pada
saat relai diaktifkan, melainkan perlu waktu. Waktu yang diperlukan untuk
memutus ataupun menyambung bisa diatur.
Ada dua jenis relai tunda waktu, yaitu relai tunda waktu hidup (time delay
switch on) dan relai tunda waktu mati (time delay switch off).
Di dalam sistem kontrol elektro-pneumatik diperlukan dua media yaitu media
udara bertekanan dan media listrik. Udara bertekanan diperlukan untuk
mengoperasikan silinder, sedangkan listrik diperlukan sebagai sumber
tegangan untuk menjalankan komponen-komponen kontrol. Karena terdapat
dua media maka diper lukan konverter yang akan memadukan kedua media
tersebut. Konverter yang digunakan adalah katup solenoid.
Katup solenoid terdiri dari katup pneumatik dan solenoid. Katuppneumatik
dihubungkan ke tangki udara bertekanan, sedangkan solenoid dihubungkan ke
Jika kumparan (5) dihubungkan dengan tegangan listrik melalui terminal A1-A2,
maka arus listrik mengalir melalui kumparan. Inti besi (7) menjadi magnit dan
menarik angker (3). Akibatnya kontak 1-4 terhubung. Posisi ini akan bertahan
selama kumparan terhubung tegangan. Jika aliran listrik terputus, angker
kembali keposisi semula karena ditarik oleh pegas (6). Kontak pemindah (8)
kembali ke posisi semula dan kontak 1-2 kembali terhubung.
Terminal kumparan ditandai dengan huruf A1 dan A2, sedangkan kumparannya
ditandai dengan huruf K, misalnya K1, K2, K3.
a. Keuntungan :
1) Mudah menyesuaikan dengan tegangan kerja
2) Rangkaian kontrol dan utama terisolasi.
3) Tidak terpengaruh oleh temperatur sekitarnya, relai tetap beroperasi
pada temperatur -40o C sampai 80o C
4) Mempunyai tahanan kontak yang tinggi pada posisi terbuka.
b. Kerugian :
1) Kontak aus oleh oksidasi atau bunga api.
2) Gangguan suara saat relai kerja,
3) Ukuran besar bila dibandingkan dengan transistor
4) Kecepatan hubung-putus terbatas berkisar antara 3ms-17ms
5) Kontak peka terhadap pencemaran udara (debu)
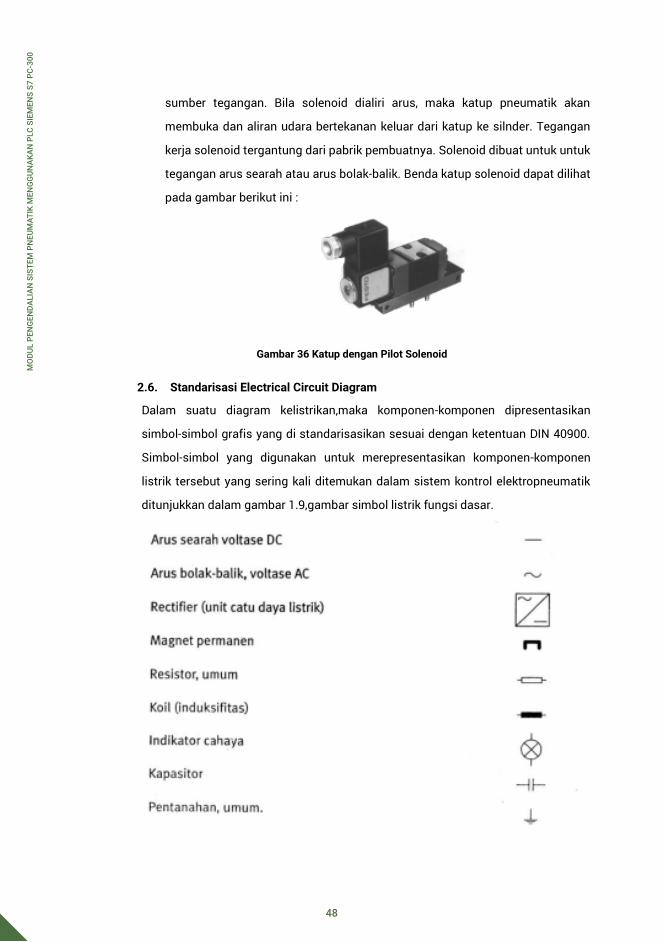
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
48
sumber tegangan. Bila solenoid dialiri arus, maka katup pneumatik akan
membuka dan aliran udara bertekanan keluar dari katup ke silnder. Tegangan
kerja solenoid tergantung dari pabrik pembuatnya. Solenoid dibuat untuk untuk
tegangan arus searah atau arus bolak-balik. Benda katup solenoid dapat dilihat
pada gambar berikut ini :
Dalam suatu diagram kelistrikan,maka komponen-komponen dipresentasikan
simbol-simbol grafis yang di standarisasikan sesuai dengan ketentuan DIN 40900.
Simbol-simbol yang digunakan untuk merepresentasikan komponen-komponen
listrik tersebut yang sering kali ditemukan dalam sistem kontrol elektropneumatik
ditunjukkan dalam gambar 1.9,gambar simbol listrik fungsi dasar.
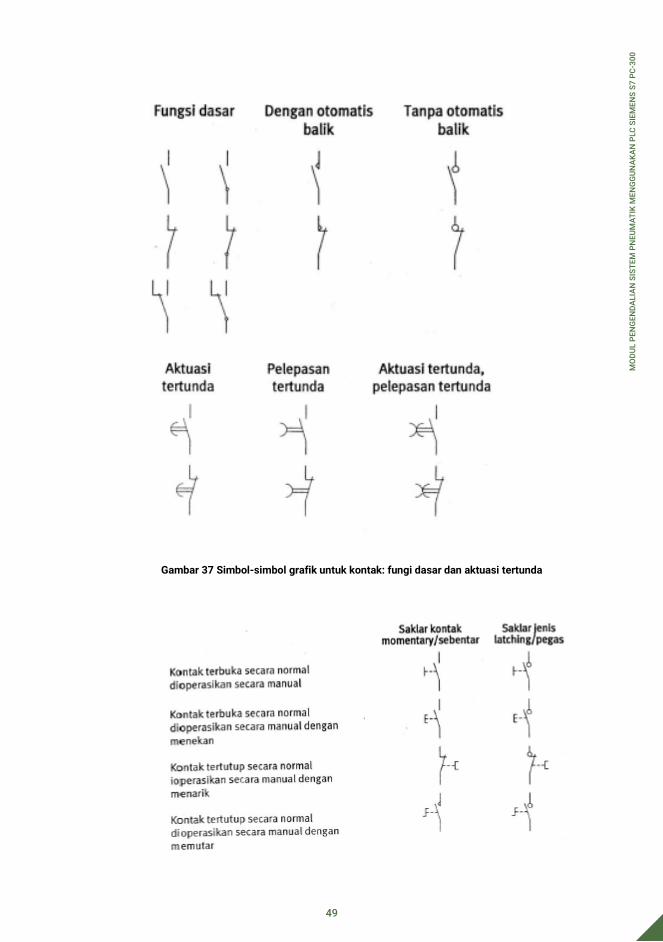
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
49
sumber tegangan. Bila solenoid dialiri arus, maka katup pneumatik akan
membuka dan aliran udara bertekanan keluar dari katup ke silnder. Tegangan
kerja solenoid tergantung dari pabrik pembuatnya. Solenoid dibuat untuk untuk
tegangan arus searah atau arus bolak-balik. Benda katup solenoid dapat dilihat
pada gambar berikut ini :
Dalam suatu diagram kelistrikan,maka komponen-komponen dipresentasikan
simbol-simbol grafis yang di standarisasikan sesuai dengan ketentuan DIN 40900.
Simbol-simbol yang digunakan untuk merepresentasikan komponen-komponen
listrik tersebut yang sering kali ditemukan dalam sistem kontrol elektropneumatik
ditunjukkan dalam gambar 1.9,gambar simbol listrik fungsi dasar.
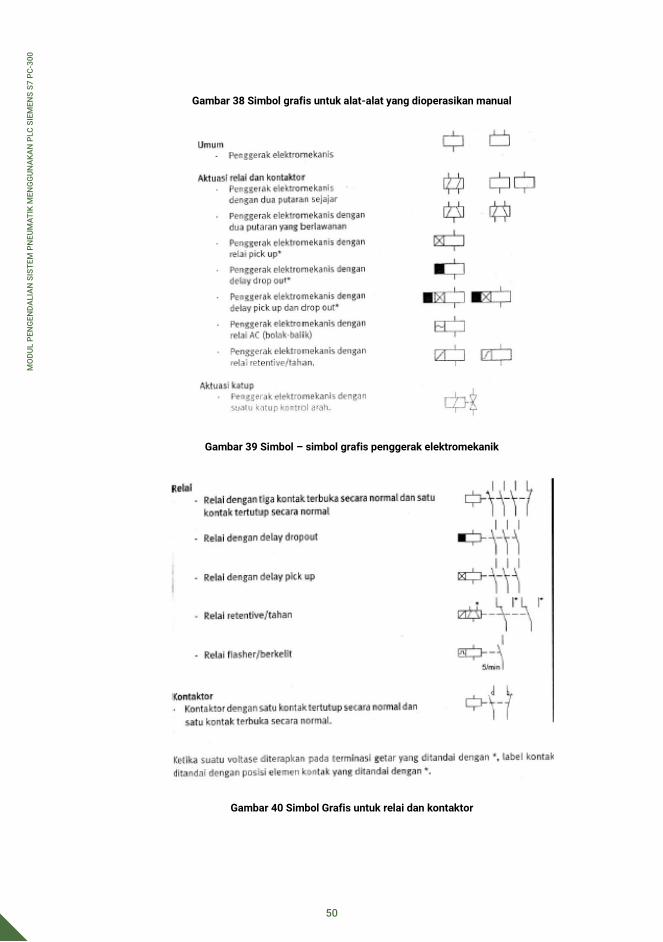
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
50
–
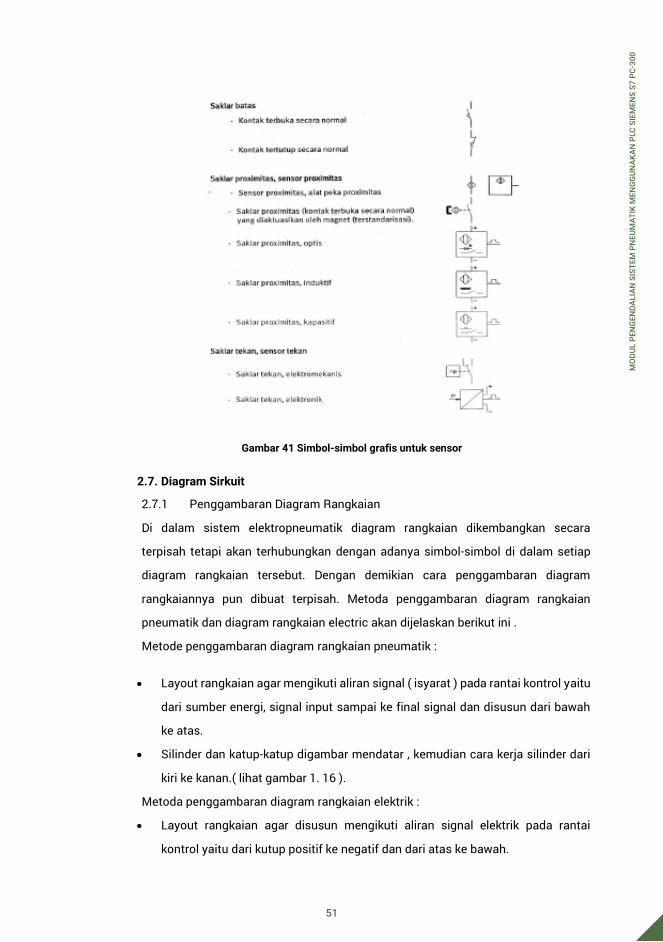
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
51
2.7.1 Penggambaran Diagram Rangkaian
Di dalam sistem elektropneumatik diagram rangkaian dikembangkan secara
terpisah tetapi akan terhubungkan dengan adanya simbol-simbol di dalam setiap
diagram rangkaian tersebut. Dengan demikian cara penggambaran diagram
rangkaiannya pun dibuat terpisah. Metoda penggambaran diagram rangkaian
pneumatik dan diagram rangkaian electric akan dijelaskan berikut ini .
Metode penggambaran diagram rangkaian pneumatik :
Layout rangkaian agar mengikuti aliran signal ( isyarat ) pada rantai kontrol yaitu
dari sumber energi, signal input sampai ke final signal dan disusun dari bawah
ke atas.
Silinder dan katup-katup digambar mendatar , kemudian cara kerja silinder dari
kiri ke kanan.( lihat gambar 1. 16 ).
Metoda penggambaran diagram rangkaian elektrik :
Layout rangkaian agar disusun mengikuti aliran signal elektrik pada rantai
kontrol yaitu dari kutup positif ke negatif dan dari atas ke bawah.
–
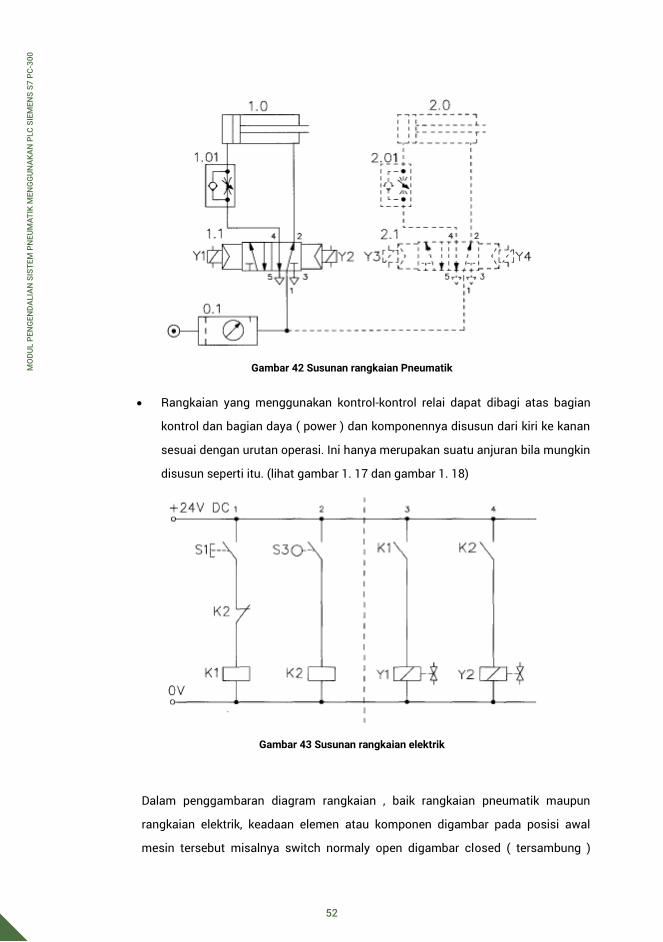
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
52
Rangkaian yang menggunakan kontrol-kontrol relai dapat dibagi atas bagian
kontrol dan bagian daya ( power ) dan komponennya disusun dari kiri ke kanan
sesuai dengan urutan operasi. Ini hanya merupakan suatu anjuran bila mungkin
disusun seperti itu. (lihat gambar 1. 17 dan gambar 1. 18)
Dalam penggambaran diagram rangkaian , baik rangkaian pneumatik maupun
rangkaian elektrik, keadaan elemen atau komponen digambar pada posisi awal
mesin tersebut misalnya switch normaly open digambar closed ( tersambung )
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
53
karena memang posisi awal mesin menghendaki seperti itu. Lihat gambar 1.18.
Switch NO digambar closed dengan tambahan tanda panah.
Jadi hal penting dalam sistem operasi adalah pengembangan dan pemeliharaan
dokumen-dokumen yang menyediakan informasi-informasi yang komplit dan akurat
tentang
Urutan kerja dari sistem. Informasi ini akan digunakan baik oleh desainer
maupun oleh maintener ( Petugas pemeliharaan ).
Sambungan antar komponen di dalam rangkaian Instalatur dan pemakai perlu
memahami cara kerja rangkaian. Ini perlu wiring diagram yang menunjukkan
nomor dan titik sambungan.
Fungsi dari rangkaian disajikan tanpa tambahan-tambahan informasi yang tak
perlu. Apabila rangkaian cukup kompleks maka informasinya perlu didapat dari
kombinasi antara rangkaian diagram dan wiring diagram.
Prosedur untuk mengembangkan sistem kontrol bisaanya mengikuti prosedur sbb:
1. Pemilihan dan konfigurasi perlengkapan listrik pneumatik
2. Implementasi (dalam pembuatan dan uji coba)
Dapat dilihat pada gambar sbb:
Rangkaian yang menggunakan kontrol-kontrol relai dapat dibagi atas bagian
kontrol dan bagian daya ( power ) dan komponennya disusun dari kiri ke kanan
sesuai dengan urutan operasi. Ini hanya merupakan suatu anjuran bila mungkin
disusun seperti itu. (lihat gambar 1. 17 dan gambar 1. 18)
Dalam penggambaran diagram rangkaian , baik rangkaian pneumatik maupun
rangkaian elektrik, keadaan elemen atau komponen digambar pada posisi awal
mesin tersebut misalnya switch normaly open digambar closed ( tersambung )
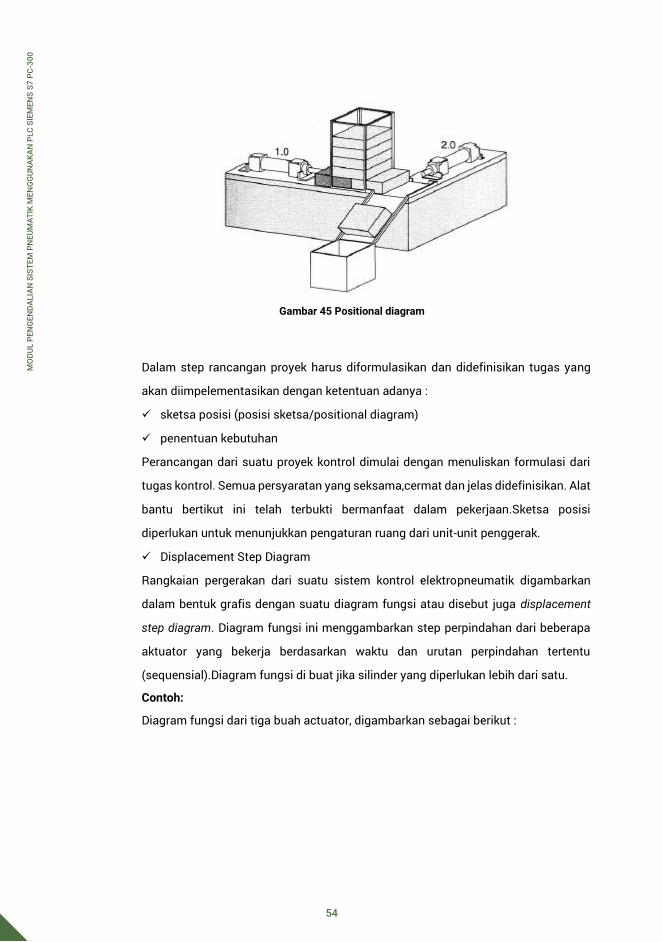
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
54
Dalam step rancangan proyek harus diformulasikan dan didefinisikan tugas yang
akan diimpelementasikan dengan ketentuan adanya :
sketsa posisi (posisi sketsa/positional diagram)
penentuan kebutuhan
Perancangan dari suatu proyek kontrol dimulai dengan menuliskan formulasi dari
tugas kontrol. Semua persyaratan yang seksama,cermat dan jelas didefinisikan. Alat
bantu bertikut ini telah terbukti bermanfaat dalam pekerjaan.Sketsa posisi
diperlukan untuk menunjukkan pengaturan ruang dari unit-unit penggerak.
Displacement Step Diagram
Rangkaian pergerakan dari suatu sistem kontrol elektropneumatik digambarkan
dalam bentuk grafis dengan suatu diagram fungsi atau disebut juga displacement
step diagram. Diagram fungsi ini menggambarkan step perpindahan dari beberapa
aktuator yang bekerja berdasarkan waktu dan urutan perpindahan tertentu
(sequensial).Diagram fungsi di buat jika silinder yang diperlukan lebih dari satu.
Diagram fungsi dari tiga buah actuator, digambarkan sebagai berikut :
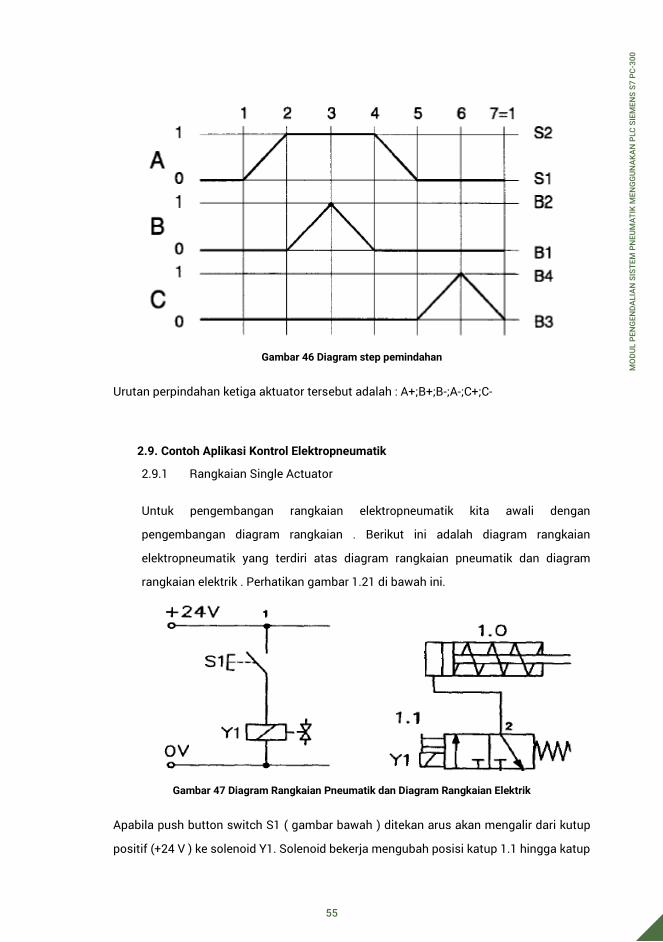
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
55
Urutan perpindahan ketiga aktuator tersebut adalah : A+;B+;B-;A-;C+;C-
2.9.1 Rangkaian Single Actuator
Untuk pengembangan rangkaian elektropneumatik kita awali dengan
pengembangan diagram rangkaian . Berikut ini adalah diagram rangkaian
elektropneumatik yang terdiri atas diagram rangkaian pneumatik dan diagram
rangkaian elektrik . Perhatikan gambar 1.21 di bawah ini.
Apabila push button switch S1 ( gambar bawah ) ditekan arus akan mengalir dari kutup
positif (+24 V ) ke solenoid Y1. Solenoid bekerja mengubah posisi katup 1.1 hingga katup
Dalam step rancangan proyek harus diformulasikan dan didefinisikan tugas yang
akan diimpelementasikan dengan ketentuan adanya :
sketsa posisi (posisi sketsa/positional diagram)
penentuan kebutuhan
Perancangan dari suatu proyek kontrol dimulai dengan menuliskan formulasi dari
tugas kontrol. Semua persyaratan yang seksama,cermat dan jelas didefinisikan. Alat
bantu bertikut ini telah terbukti bermanfaat dalam pekerjaan.Sketsa posisi
diperlukan untuk menunjukkan pengaturan ruang dari unit-unit penggerak.
Displacement Step Diagram
Rangkaian pergerakan dari suatu sistem kontrol elektropneumatik digambarkan
dalam bentuk grafis dengan suatu diagram fungsi atau disebut juga displacement
step diagram. Diagram fungsi ini menggambarkan step perpindahan dari beberapa
aktuator yang bekerja berdasarkan waktu dan urutan perpindahan tertentu
(sequensial).Diagram fungsi di buat jika silinder yang diperlukan lebih dari satu.
Diagram fungsi dari tiga buah actuator, digambarkan sebagai berikut :
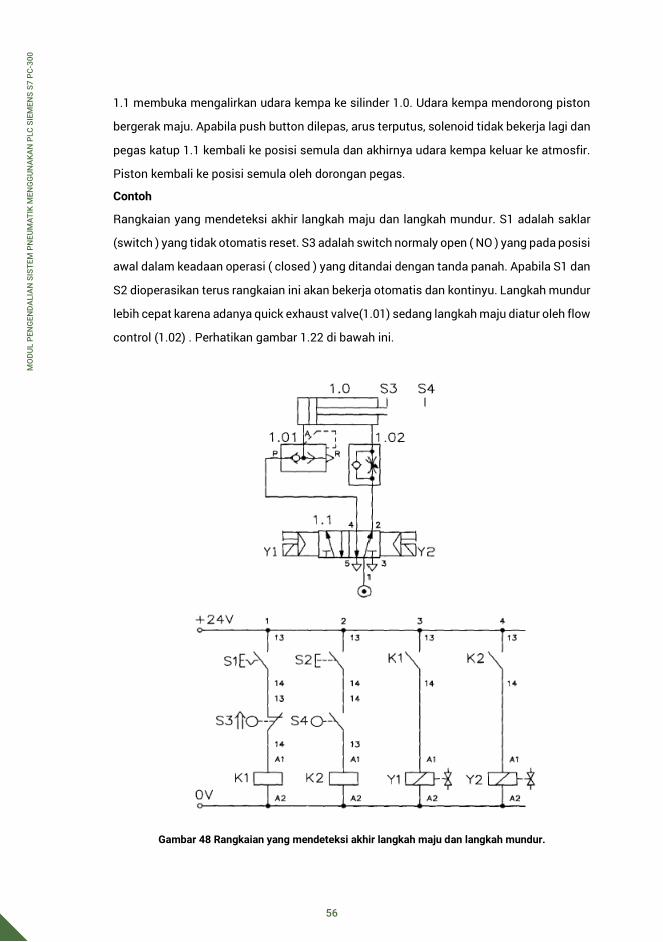
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
56
1.1 membuka mengalirkan udara kempa ke silinder 1.0. Udara kempa mendorong piston
bergerak maju. Apabila push button dilepas, arus terputus, solenoid tidak bekerja lagi dan
pegas katup 1.1 kembali ke posisi semula dan akhirnya udara kempa keluar ke atmosfir.
Piston kembali ke posisi semula oleh dorongan pegas.
Rangkaian yang mendeteksi akhir langkah maju dan langkah mundur. S1 adalah saklar
(switch ) yang tidak otomatis reset. S3 adalah switch normaly open ( NO ) yang pada posisi
awal dalam keadaan operasi ( closed ) yang ditandai dengan tanda panah. Apabila S1 dan
S2 dioperasikan terus rangkaian ini akan bekerja otomatis dan kontinyu. Langkah mundur
lebih cepat karena adanya quick exhaust valve(1.01) sedang langkah maju diatur oleh flow
control (1.02) . Perhatikan gambar 1.22 di bawah ini.
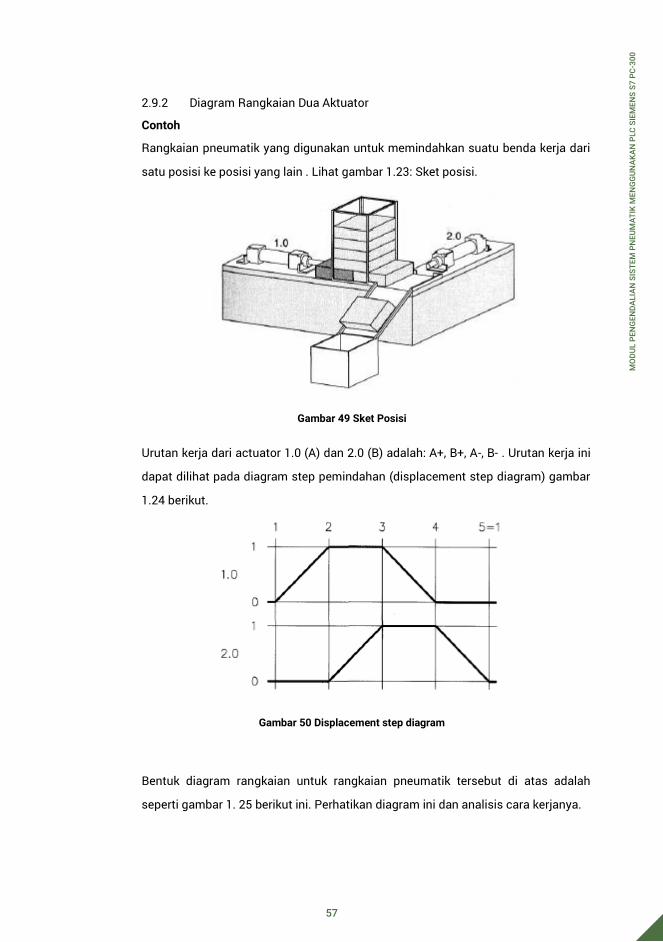
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
57
2.9.2 Diagram Rangkaian Dua Aktuator
Rangkaian pneumatik yang digunakan untuk memindahkan suatu benda kerja dari
satu posisi ke posisi yang lain . Lihat gambar 1.23: Sket posisi.
Urutan kerja dari actuator 1.0 (A) dan 2.0 (B) adalah: A+, B+, A-, B- . Urutan kerja ini
dapat dilihat pada diagram step pemindahan (displacement step diagram) gambar
1.24 berikut.
Bentuk diagram rangkaian untuk rangkaian pneumatik tersebut di atas adalah
seperti gambar 1. 25 berikut ini. Perhatikan diagram ini dan analisis cara kerjanya.
1.1 membuka mengalirkan udara kempa ke silinder 1.0. Udara kempa mendorong piston
bergerak maju. Apabila push button dilepas, arus terputus, solenoid tidak bekerja lagi dan
pegas katup 1.1 kembali ke posisi semula dan akhirnya udara kempa keluar ke atmosfir.
Piston kembali ke posisi semula oleh dorongan pegas.
Rangkaian yang mendeteksi akhir langkah maju dan langkah mundur. S1 adalah saklar
(switch ) yang tidak otomatis reset. S3 adalah switch normaly open ( NO ) yang pada posisi
awal dalam keadaan operasi ( closed ) yang ditandai dengan tanda panah. Apabila S1 dan
S2 dioperasikan terus rangkaian ini akan bekerja otomatis dan kontinyu. Langkah mundur
lebih cepat karena adanya quick exhaust valve(1.01) sedang langkah maju diatur oleh flow
control (1.02) . Perhatikan gambar 1.22 di bawah ini.
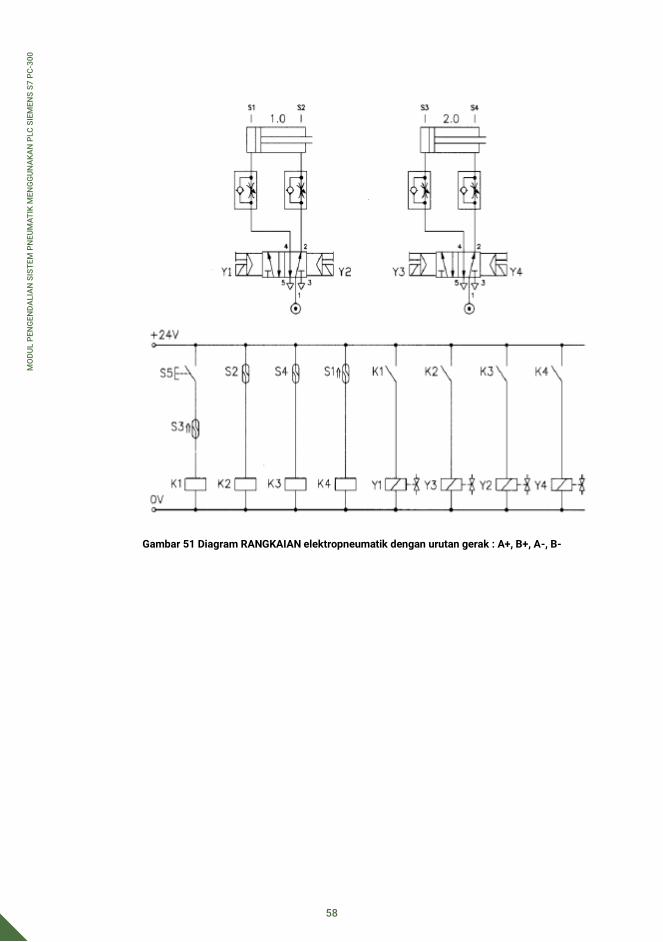
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
58
Sebelum membuat atau membangun aplikasi sistem kontrol elektropneumatik diperlukan
suatu rancangan atau desain kontrol dengan membuat sketsa posisi,positional
program,diagram layout pneumatik ,diagram rangkaian elektrik,dan jika di rancang
menggunakan desain kontrol berurutan maka diperlukan displacement diagram untuk
mempermudah dalam membuat diagram rangkaian elektrik. Pengontrolan
elektropneumatik mempunyai keuntungan berikut ini dibandingkan dengan kontrol
pneumatik :
Keandalan yang tinggi (lebih sedikit bagian yang bergerak sehingga dapat
mengurangi tingkat keausan yang diakibatkan oleh pemakaian).
Perencanaan dan upaya uji serah terima lebih rendah, terutama untuk pengontrolan
yang rumit.
Upaya instalasi lebih randah, terutama ketika pengintalan komponen-komponen,
seperti terminal-terminal katup yang digunakan.
Perubahan informasi yang lebih mudah diantara beberapa kontroler.
Pengontrolan-pengontrolan elektropneumatik telah diapilkasikan di Industri Modern dan
aplikasi sistem kontrol pneumatik murni terbatas pada beberapa aplikasi khusus.
Lihatlah system yang ada di lingkungan rumah kalian, amatilah system yang bisa di
buat menggunakan elektropneumatik.
Buat rancangan awal dan tuliskan komponennya
1. Apakah yang dimaksud kontak Normaly open dan normaly close ?
2. Apakah yang dimaksud dengan Relai, dan fungsinya ?
3. Jelaskan prinsip kerja Timer On-Delay dan Off-delay !
4. Sebutkan 4 macam sensor !
5. Apakah yang diperlukan untuk menyambungkan antara rangkaian elektronik dengan
rangkaian pneumatik ?
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
59
Sebelum membuat atau membangun aplikasi sistem kontrol elektropneumatik diperlukan
suatu rancangan atau desain kontrol dengan membuat sketsa posisi,positional
program,diagram layout pneumatik ,diagram rangkaian elektrik,dan jika di rancang
menggunakan desain kontrol berurutan maka diperlukan displacement diagram untuk
mempermudah dalam membuat diagram rangkaian elektrik. Pengontrolan
elektropneumatik mempunyai keuntungan berikut ini dibandingkan dengan kontrol
pneumatik :
Keandalan yang tinggi (lebih sedikit bagian yang bergerak sehingga dapat
mengurangi tingkat keausan yang diakibatkan oleh pemakaian).
Perencanaan dan upaya uji serah terima lebih rendah, terutama untuk pengontrolan
yang rumit.
Upaya instalasi lebih randah, terutama ketika pengintalan komponen-komponen,
seperti terminal-terminal katup yang digunakan.
Perubahan informasi yang lebih mudah diantara beberapa kontroler.
Pengontrolan-pengontrolan elektropneumatik telah diapilkasikan di Industri Modern dan
aplikasi sistem kontrol pneumatik murni terbatas pada beberapa aplikasi khusus.
Lihatlah system yang ada di lingkungan rumah kalian, amatilah system yang bisa di
buat menggunakan elektropneumatik.
Buat rancangan awal dan tuliskan komponennya
1. Apakah yang dimaksud kontak Normaly open dan normaly close ?
2. Apakah yang dimaksud dengan Relai, dan fungsinya ?
3. Jelaskan prinsip kerja Timer On-Delay dan Off-delay !
4. Sebutkan 4 macam sensor !
5. Apakah yang diperlukan untuk menyambungkan antara rangkaian elektronik dengan
rangkaian pneumatik ?
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
60
1. Kontak Normaly open adalah kontak penghubung yang terbuka (tidak terhubung )
saat pemicu kontak tidak teraliri listrik dan kontak akan berubah tertutup (terhubung)
setelah pemicu kontak teraliri arus listrik.
Kontak Normaly Close adalah kontak penghubung yang tertutup (terhubung) saat
pemicu kontak tidak teraliri listrik dan kontak akan berubah terbuka (tidak terhubung)
setelah pemicu kontak teraliri arus listrik.
2. Relai adalah kontak(saklar) yang terkontrol. Berfungsi sebagai penghubung atau
pemutus sirkit pada rangkaian yang komplek
3. Timer On-delay adalah timer yang kontaknya akan bekerja (aktif) setelah waktu tunda
dari timer terpenuhi.
Timer Off-delay adalah timer yang kontaknya langsung aktif dan kontak akan putus
tetapi waktu putusnya menunggu timer off-delay tidak teraliri arus listrik (mati)
ditambah dengan setting value waktu timernya.
4. Sensor limit switch, Proxymiti, Presure dan optical sensor
5. Komponen penghubung yang bisa menggerakkan konstruksi mekanik ( valve
pneumatik) menggunakan rangkaian elektronik adalah solenoid
Catatan : Untuk menyelesaikan tugas-tugas berikut dianjurkan setiap peserta bekerja
secara individual dengan bantuan software Fluidsim. Apabila tidak memungkinkan, dapat
dilaksanakan kerja kelompok maksimum dua orang setiap kelompok ( group).
Perhatikan diagram elektropneumatik di bawah, kemudian selesaikan tugas-tugas berikut
:
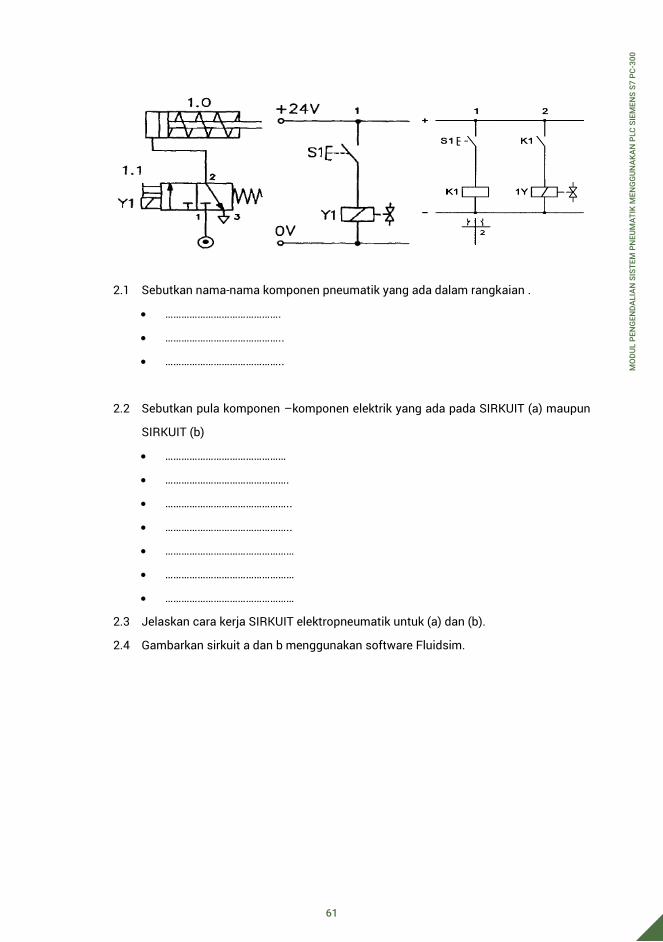
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
61
2.1 Sebutkan nama-nama komponen pneumatik yang ada dalam rangkaian .
…………………………………….
……………………………………..
……………………………………..
2.2 Sebutkan pula komponen –komponen elektrik yang ada pada SIRKUIT (a) maupun
SIRKUIT (b)
………………………………………
……………………………………….
………………………………………..
………………………………………..
…………………………………………
…………………………………………
…………………………………………
2.3 Jelaskan cara kerja SIRKUIT elektropneumatik untuk (a) dan (b).
2.4 Gambarkan sirkuit a dan b menggunakan software Fluidsim.
1. Kontak Normaly open adalah kontak penghubung yang terbuka (tidak terhubung )
saat pemicu kontak tidak teraliri listrik dan kontak akan berubah tertutup (terhubung)
setelah pemicu kontak teraliri arus listrik.
Kontak Normaly Close adalah kontak penghubung yang tertutup (terhubung) saat
pemicu kontak tidak teraliri listrik dan kontak akan berubah terbuka (tidak terhubung)
setelah pemicu kontak teraliri arus listrik.
2. Relai adalah kontak(saklar) yang terkontrol. Berfungsi sebagai penghubung atau
pemutus sirkit pada rangkaian yang komplek
3. Timer On-delay adalah timer yang kontaknya akan bekerja (aktif) setelah waktu tunda
dari timer terpenuhi.
Timer Off-delay adalah timer yang kontaknya langsung aktif dan kontak akan putus
tetapi waktu putusnya menunggu timer off-delay tidak teraliri arus listrik (mati)
ditambah dengan setting value waktu timernya.
4. Sensor limit switch, Proxymiti, Presure dan optical sensor
5. Komponen penghubung yang bisa menggerakkan konstruksi mekanik ( valve
pneumatik) menggunakan rangkaian elektronik adalah solenoid
Catatan : Untuk menyelesaikan tugas-tugas berikut dianjurkan setiap peserta bekerja
secara individual dengan bantuan software Fluidsim. Apabila tidak memungkinkan, dapat
dilaksanakan kerja kelompok maksimum dua orang setiap kelompok ( group).
Perhatikan diagram elektropneumatik di bawah, kemudian selesaikan tugas-tugas berikut
:
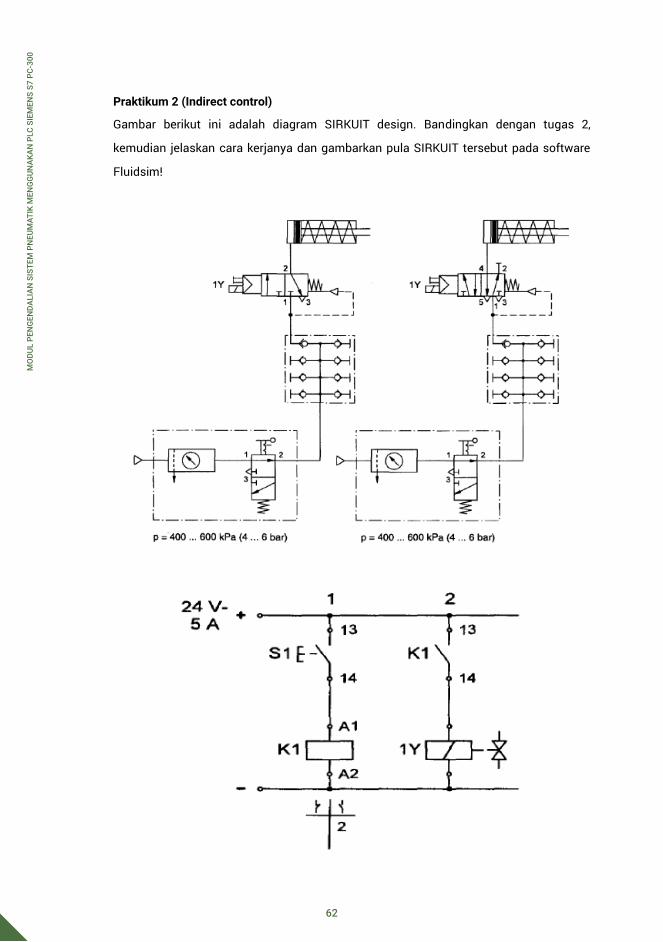
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
62
Gambar berikut ini adalah diagram SIRKUIT design. Bandingkan dengan tugas 2,
kemudian jelaskan cara kerjanya dan gambarkan pula SIRKUIT tersebut pada software
Fluidsim!
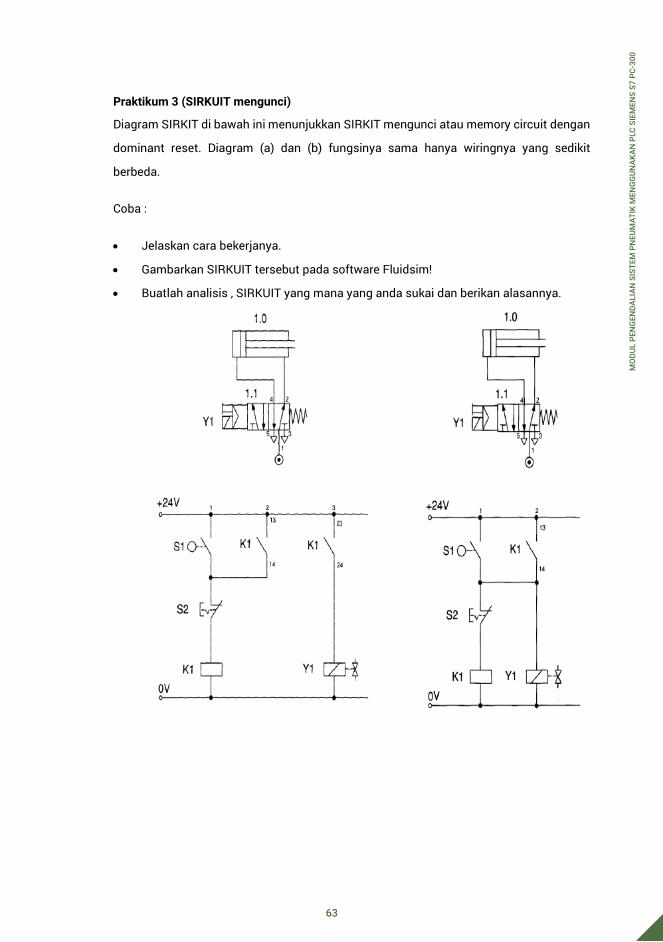
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
63
Diagram SIRKIT di bawah ini menunjukkan SIRKIT mengunci atau memory circuit dengan
dominant reset. Diagram (a) dan (b) fungsinya sama hanya wiringnya yang sedikit
berbeda.
Coba :
Jelaskan cara bekerjanya.
Gambarkan SIRKUIT tersebut pada software Fluidsim!
Buatlah analisis , SIRKUIT yang mana yang anda sukai dan berikan alasannya.
Gambar berikut ini adalah diagram SIRKUIT design. Bandingkan dengan tugas 2,
kemudian jelaskan cara kerjanya dan gambarkan pula SIRKUIT tersebut pada software
Fluidsim!
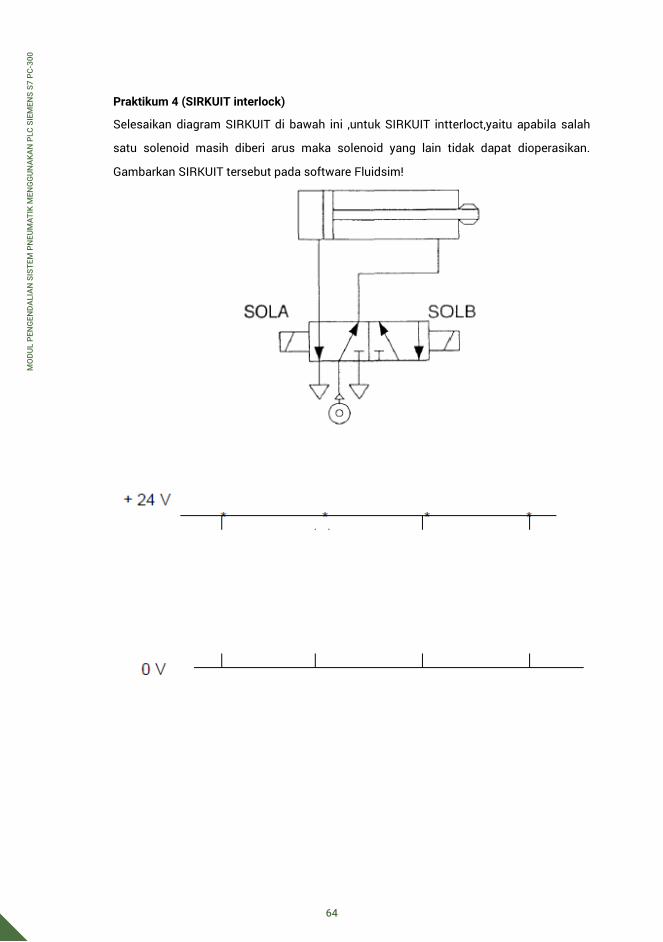
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
64
Selesaikan diagram SIRKUIT di bawah ini ,untuk SIRKUIT intterloct,yaitu apabila salah
satu solenoid masih diberi arus maka solenoid yang lain tidak dapat dioperasikan.
Gambarkan SIRKUIT tersebut pada software Fluidsim!
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
65
Setelah selesai mempelajari modul ini peserta dapat:
1. Melakukan konfigurasi PLC Siemens pada Step 7
2. Menulis program logika dasar dengan menggunakan software Step 7
3. Mendownload program logika dasar dari PC/laptop ke PLC Stasiun Distribusi.
4. Mengoperasikan operasi logika dasar pada perangkat PLC dengan menggunakan
modul I/O.
Indikator Pencapaian Kompetensi
1. Konfigurasi hardware PLC pada Step 7
2. Membuat program logika dasar menggunakan Software Step 7
3. Mengoprasikan peralatan modul I/O yang terhubung dengan PLC
Menurut William Bolton (2004, 3), Programmable logic controller (PLC) merupakan suatu
bentuk khusus pengontrol berbasis mikroprosesor yang memanfaatkan memori yang
dapat diprogram untuk menyimpan instruksi dan mengimplementasikan fungsi seperti
logika (logic), pewaktuan (timing), pencacahan (counting), dan aritmatika guna mengontrol
mesin dan proses. Konsep PLC adalah sebagai berikut :
1. Programmable; menunjukkan kemampuannya yang dapat dengan mudah diubah-
ubah sesuai program yang dibuat dan kemampuannya dalam hal memori program
yang telah dibuat.
2. Logic menunjukkan kemampuan dalam memproses input secara aritmatik dan logic,
yakni melakukan operasi membandingkan, menjumlahkan, mengalikan, membagi,
mengurangi, dan negasi.
3. Controller; menunjukkan kemampuan dalam mengontrol dan mengatur proses
sehingga menghasilkan output yang diinginkan.
PLC Siemens S7-300 adalah PLC buatan PT. SIEMENS German, PLC S7-300 didesain
berbentuk modular, sehingga dapat membangun sistem dengan mengombinasikan
3. KEGIATAN PEMBELAJARAN 3:
1.
2.
3.
4.
Selesaikan diagram SIRKUIT di bawah ini ,untuk SIRKUIT intterloct,yaitu apabila salah
satu solenoid masih diberi arus maka solenoid yang lain tidak dapat dioperasikan.
Gambarkan SIRKUIT tersebut pada software Fluidsim!
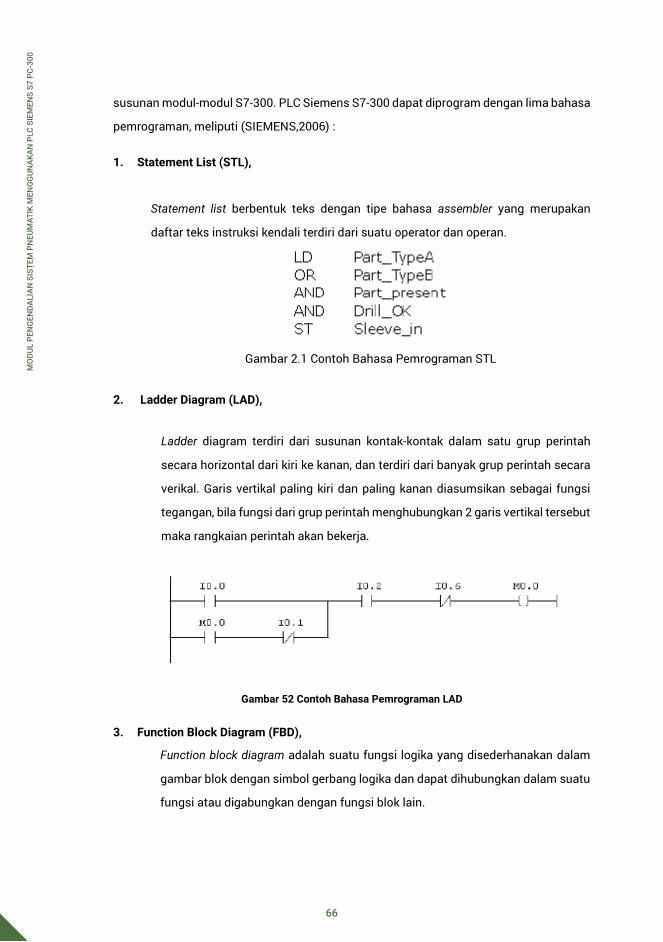
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
66
susunan modul-modul S7-300. PLC Siemens S7-300 dapat diprogram dengan lima bahasa
pemrograman, meliputi (SIEMENS,2006) :
Statement list berbentuk teks dengan tipe bahasa assembler yang merupakan
daftar teks instruksi kendali terdiri dari suatu operator dan operan.
Gambar 2.1 Contoh Bahasa Pemrograman STL
Ladder diagram terdiri dari susunan kontak-kontak dalam satu grup perintah
secara horizontal dari kiri ke kanan, dan terdiri dari banyak grup perintah secara
verikal. Garis vertikal paling kiri dan paling kanan diasumsikan sebagai fungsi
tegangan, bila fungsi dari grup perintah menghubungkan 2 garis vertikal tersebut
maka rangkaian perintah akan bekerja.
Function block diagram adalah suatu fungsi logika yang disederhanakan dalam
gambar blok dengan simbol gerbang logika dan dapat dihubungkan dalam suatu
fungsi atau digabungkan dengan fungsi blok lain.
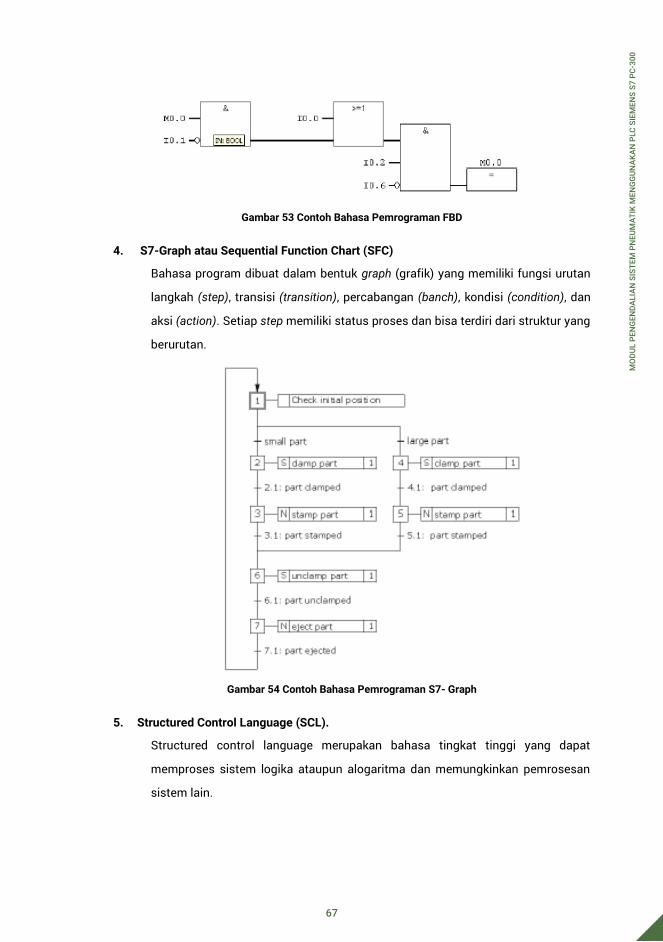
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
67
Bahasa program dibuat dalam bentuk graph (grafik) yang memiliki fungsi urutan
langkah (step), transisi (transition), percabangan (banch), kondisi (condition), dan
aksi (action). Setiap step memiliki status proses dan bisa terdiri dari struktur yang
berurutan.
Structured control language merupakan bahasa tingkat tinggi yang dapat
memproses sistem logika ataupun alogaritma dan memungkinkan pemrosesan
sistem lain.
susunan modul-modul S7-300. PLC Siemens S7-300 dapat diprogram dengan lima bahasa
pemrograman, meliputi (SIEMENS,2006) :
Statement list berbentuk teks dengan tipe bahasa assembler yang merupakan
daftar teks instruksi kendali terdiri dari suatu operator dan operan.
Gambar 2.1 Contoh Bahasa Pemrograman STL
Ladder diagram terdiri dari susunan kontak-kontak dalam satu grup perintah
secara horizontal dari kiri ke kanan, dan terdiri dari banyak grup perintah secara
verikal. Garis vertikal paling kiri dan paling kanan diasumsikan sebagai fungsi
tegangan, bila fungsi dari grup perintah menghubungkan 2 garis vertikal tersebut
maka rangkaian perintah akan bekerja.
Function block diagram adalah suatu fungsi logika yang disederhanakan dalam
gambar blok dengan simbol gerbang logika dan dapat dihubungkan dalam suatu
fungsi atau digabungkan dengan fungsi blok lain.
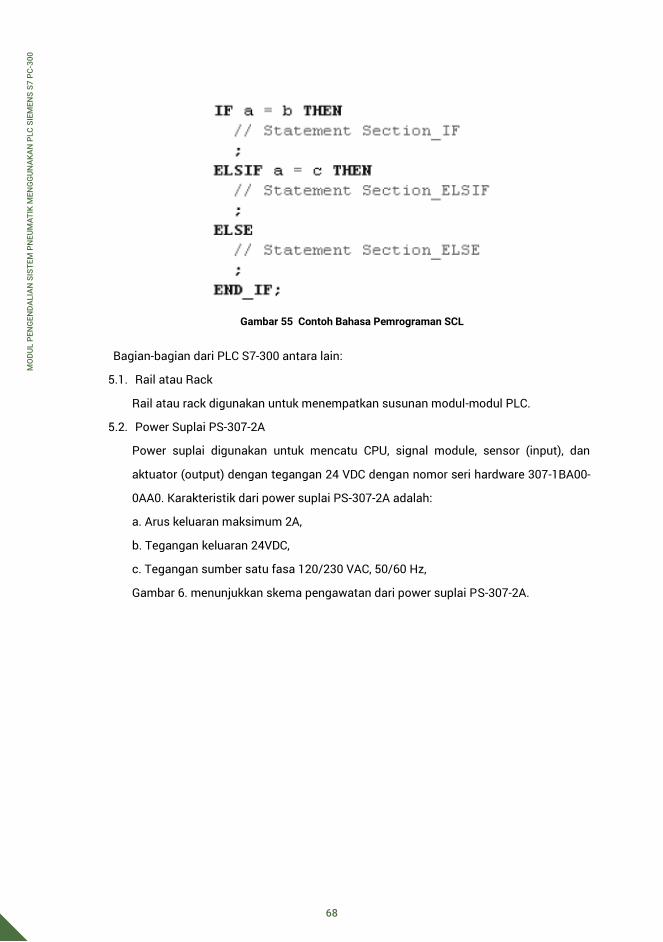
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
68
Bagian-bagian dari PLC S7-300 antara lain:
5.1. Rail atau Rack
Rail atau rack digunakan untuk menempatkan susunan modul-modul PLC.
5.2. Power Suplai PS-307-2A
Power suplai digunakan untuk mencatu CPU, signal module, sensor (input), dan
aktuator (output) dengan tegangan 24 VDC dengan nomor seri hardware 307-1BA00-
0AA0. Karakteristik dari power suplai PS-307-2A adalah:
a. Arus keluaran maksimum 2A,
b. Tegangan keluaran 24VDC,
c. Tegangan sumber satu fasa 120/230 VAC, 50/60 Hz,
Gambar 6. menunjukkan skema pengawatan dari power suplai PS-307-2A.
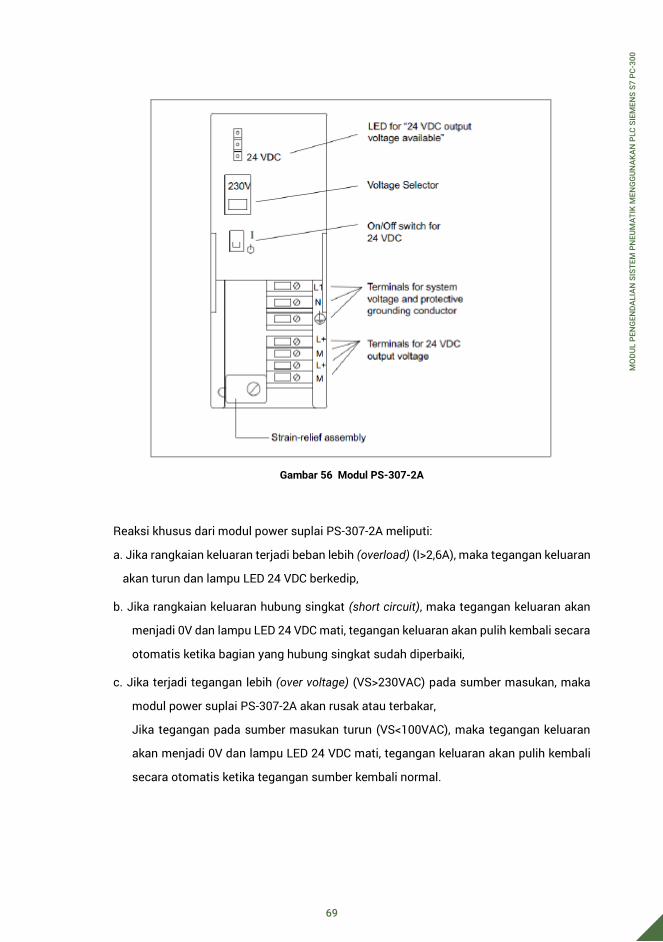
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
69
Reaksi khusus dari modul power suplai PS-307-2A meliputi:
a. Jika rangkaian keluaran terjadi beban lebih (overload) (I>2,6A), maka tegangan keluaran
akan turun dan lampu LED 24 VDC berkedip,
b. Jika rangkaian keluaran hubung singkat (short circuit), maka tegangan keluaran akan
menjadi 0V dan lampu LED 24 VDC mati, tegangan keluaran akan pulih kembali secara
otomatis ketika bagian yang hubung singkat sudah diperbaiki,
c. Jika terjadi tegangan lebih (over voltage) (VS>230VAC) pada sumber masukan, maka
modul power suplai PS-307-2A akan rusak atau terbakar,
Jika tegangan pada sumber masukan turun (VS<100VAC), maka tegangan keluaran
akan menjadi 0V dan lampu LED 24 VDC mati, tegangan keluaran akan pulih kembali
secara otomatis ketika tegangan sumber kembali normal.
Bagian-bagian dari PLC S7-300 antara lain:
5.1. Rail atau Rack
Rail atau rack digunakan untuk menempatkan susunan modul-modul PLC.
5.2. Power Suplai PS-307-2A
Power suplai digunakan untuk mencatu CPU, signal module, sensor (input), dan
aktuator (output) dengan tegangan 24 VDC dengan nomor seri hardware 307-1BA00-
0AA0. Karakteristik dari power suplai PS-307-2A adalah:
a. Arus keluaran maksimum 2A,
b. Tegangan keluaran 24VDC,
c. Tegangan sumber satu fasa 120/230 VAC, 50/60 Hz,
Gambar 6. menunjukkan skema pengawatan dari power suplai PS-307-2A.
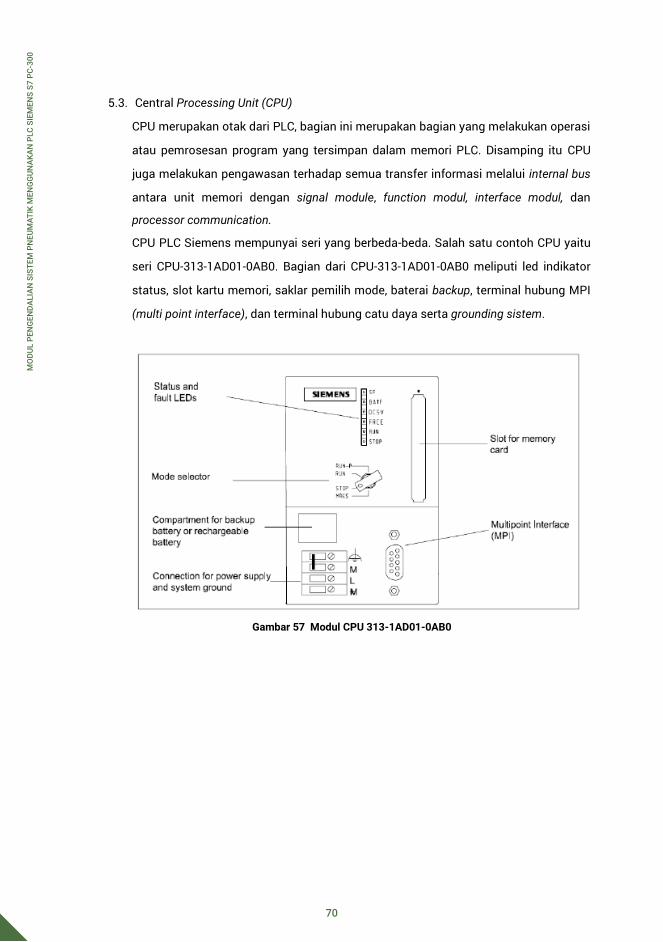
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
70
5.3. Central Processing Unit (CPU)
CPU merupakan otak dari PLC, bagian ini merupakan bagian yang melakukan operasi
atau pemrosesan program yang tersimpan dalam memori PLC. Disamping itu CPU
juga melakukan pengawasan terhadap semua transfer informasi melalui internal bus
antara unit memori dengan signal module, function modul, interface modul, dan
processor communication.
CPU PLC Siemens mempunyai seri yang berbeda-beda. Salah satu contoh CPU yaitu
seri CPU-313-1AD01-0AB0. Bagian dari CPU-313-1AD01-0AB0 meliputi led indikator
status, slot kartu memori, saklar pemilih mode, baterai backup, terminal hubung MPI
(multi point interface), dan terminal hubung catu daya serta grounding sistem.
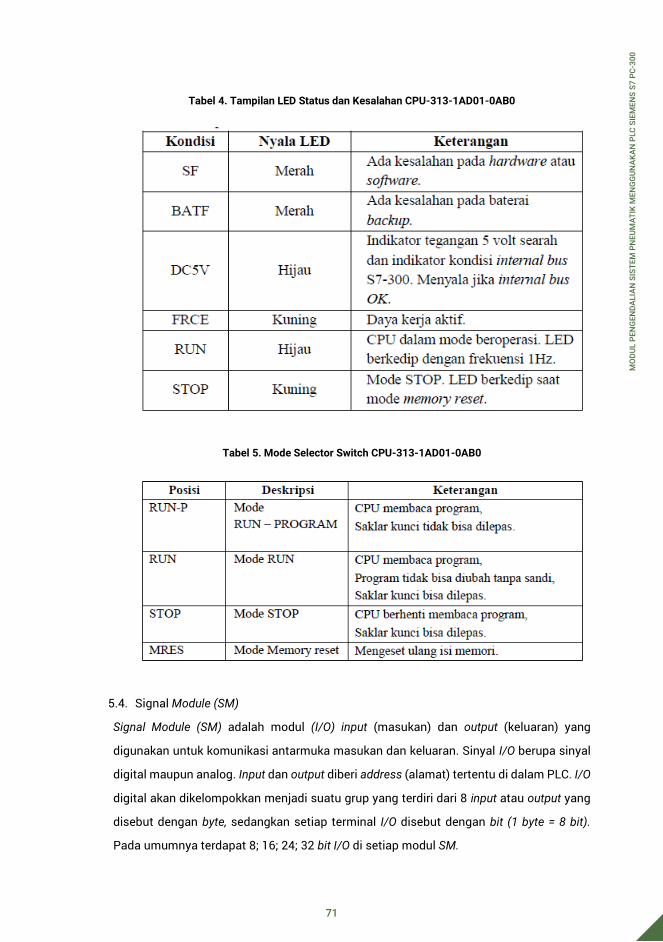
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
71
5.4. Signal Module (SM)
Signal Module (SM) adalah modul (I/O) input (masukan) dan output (keluaran) yang
digunakan untuk komunikasi antarmuka masukan dan keluaran. Sinyal I/O berupa sinyal
digital maupun analog. Input dan output diberi address (alamat) tertentu di dalam PLC. I/O
digital akan dikelompokkan menjadi suatu grup yang terdiri dari 8 input atau output yang
disebut dengan byte, sedangkan setiap terminal I/O disebut dengan bit (1 byte = 8 bit).
Pada umumnya terdapat 8; 16; 24; 32 bit I/O di setiap modul SM.
5.3. Central Processing Unit (CPU)
CPU merupakan otak dari PLC, bagian ini merupakan bagian yang melakukan operasi
atau pemrosesan program yang tersimpan dalam memori PLC. Disamping itu CPU
juga melakukan pengawasan terhadap semua transfer informasi melalui internal bus
antara unit memori dengan signal module, function modul, interface modul, dan
processor communication.
CPU PLC Siemens mempunyai seri yang berbeda-beda. Salah satu contoh CPU yaitu
seri CPU-313-1AD01-0AB0. Bagian dari CPU-313-1AD01-0AB0 meliputi led indikator
status, slot kartu memori, saklar pemilih mode, baterai backup, terminal hubung MPI
(multi point interface), dan terminal hubung catu daya serta grounding sistem.
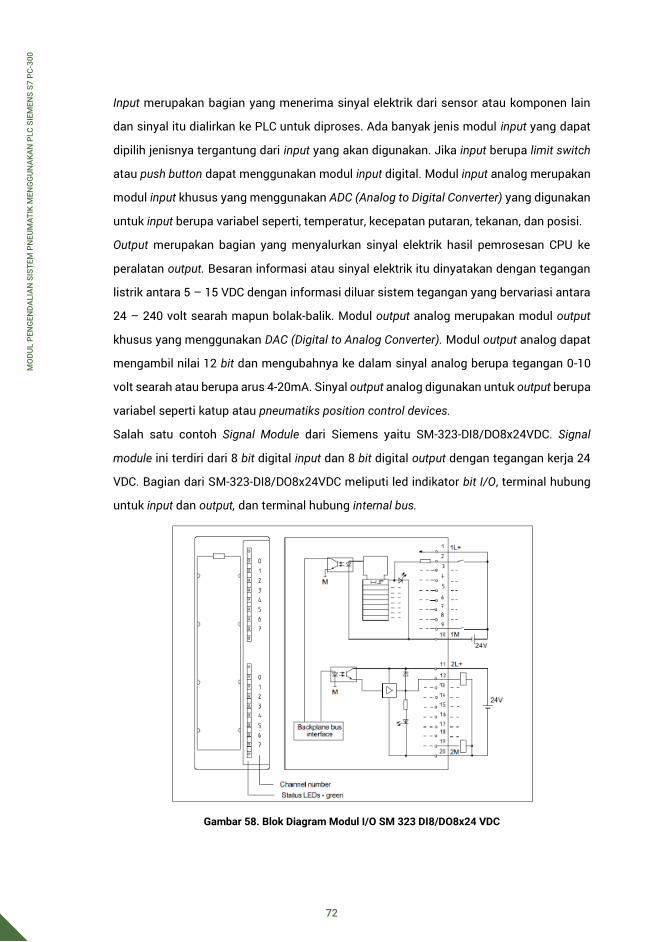
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
72
Input merupakan bagian yang menerima sinyal elektrik dari sensor atau komponen lain
dan sinyal itu dialirkan ke PLC untuk diproses. Ada banyak jenis modul input yang dapat
dipilih jenisnya tergantung dari input yang akan digunakan. Jika input berupa limit switch
atau push button dapat menggunakan modul input digital. Modul input analog merupakan
modul input khusus yang menggunakan ADC (Analog to Digital Converter) yang digunakan
untuk input berupa variabel seperti, temperatur, kecepatan putaran, tekanan, dan posisi.
Output merupakan bagian yang menyalurkan sinyal elektrik hasil pemrosesan CPU ke
peralatan output. Besaran informasi atau sinyal elektrik itu dinyatakan dengan tegangan
listrik antara 5 – 15 VDC dengan informasi diluar sistem tegangan yang bervariasi antara
24 – 240 volt searah mapun bolak-balik. Modul output analog merupakan modul output
khusus yang menggunakan DAC (Digital to Analog Converter). Modul output analog dapat
mengambil nilai 12 bit dan mengubahnya ke dalam sinyal analog berupa tegangan 0-10
volt searah atau berupa arus 4-20mA. Sinyal output analog digunakan untuk output berupa
variabel seperti katup atau pneumatiks position control devices.
Salah satu contoh Signal Module dari Siemens yaitu SM-323-DI8/DO8x24VDC. Signal
module ini terdiri dari 8 bit digital input dan 8 bit digital output dengan tegangan kerja 24
VDC. Bagian dari SM-323-DI8/DO8x24VDC meliputi led indikator bit I/O, terminal hubung
untuk input dan output, dan terminal hubung internal bus.
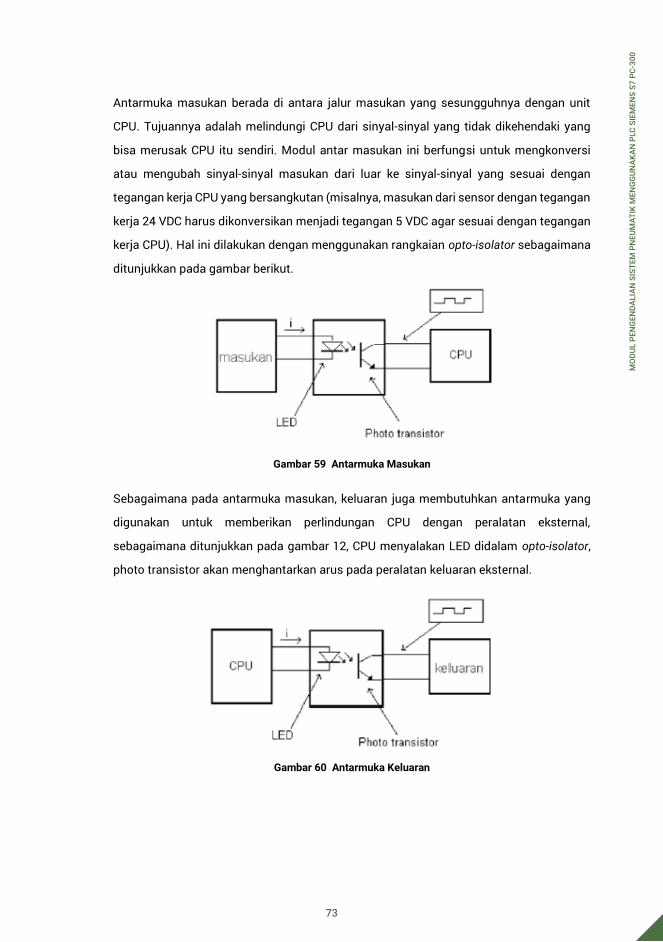
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
73
Antarmuka masukan berada di antara jalur masukan yang sesungguhnya dengan unit
CPU. Tujuannya adalah melindungi CPU dari sinyal-sinyal yang tidak dikehendaki yang
bisa merusak CPU itu sendiri. Modul antar masukan ini berfungsi untuk mengkonversi
atau mengubah sinyal-sinyal masukan dari luar ke sinyal-sinyal yang sesuai dengan
tegangan kerja CPU yang bersangkutan (misalnya, masukan dari sensor dengan tegangan
kerja 24 VDC harus dikonversikan menjadi tegangan 5 VDC agar sesuai dengan tegangan
kerja CPU). Hal ini dilakukan dengan menggunakan rangkaian opto-isolator sebagaimana
ditunjukkan pada gambar berikut.
Sebagaimana pada antarmuka masukan, keluaran juga membutuhkan antarmuka yang
digunakan untuk memberikan perlindungan CPU dengan peralatan eksternal,
sebagaimana ditunjukkan pada gambar 12, CPU menyalakan LED didalam opto-isolator,
photo transistor akan menghantarkan arus pada peralatan keluaran eksternal.
Input merupakan bagian yang menerima sinyal elektrik dari sensor atau komponen lain
dan sinyal itu dialirkan ke PLC untuk diproses. Ada banyak jenis modul input yang dapat
dipilih jenisnya tergantung dari input yang akan digunakan. Jika input berupa limit switch
atau push button dapat menggunakan modul input digital. Modul input analog merupakan
modul input khusus yang menggunakan ADC (Analog to Digital Converter) yang digunakan
untuk input berupa variabel seperti, temperatur, kecepatan putaran, tekanan, dan posisi.
Output merupakan bagian yang menyalurkan sinyal elektrik hasil pemrosesan CPU ke
peralatan output. Besaran informasi atau sinyal elektrik itu dinyatakan dengan tegangan
listrik antara 5 – 15 VDC dengan informasi diluar sistem tegangan yang bervariasi antara
24 – 240 volt searah mapun bolak-balik. Modul output analog merupakan modul output
khusus yang menggunakan DAC (Digital to Analog Converter). Modul output analog dapat
mengambil nilai 12 bit dan mengubahnya ke dalam sinyal analog berupa tegangan 0-10
volt searah atau berupa arus 4-20mA. Sinyal output analog digunakan untuk output berupa
variabel seperti katup atau pneumatiks position control devices.
Salah satu contoh Signal Module dari Siemens yaitu SM-323-DI8/DO8x24VDC. Signal
module ini terdiri dari 8 bit digital input dan 8 bit digital output dengan tegangan kerja 24
VDC. Bagian dari SM-323-DI8/DO8x24VDC meliputi led indikator bit I/O, terminal hubung
untuk input dan output, dan terminal hubung internal bus.
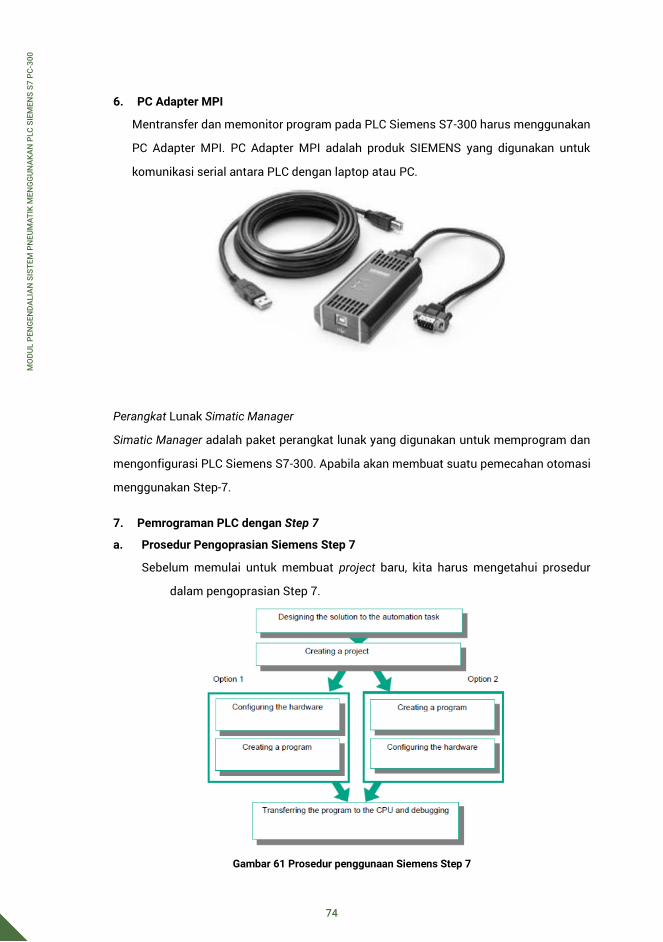
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
74
Mentransfer dan memonitor program pada PLC Siemens S7-300 harus menggunakan
PC Adapter MPI. PC Adapter MPI adalah produk SIEMENS yang digunakan untuk
komunikasi serial antara PLC dengan laptop atau PC.
Gambar 2. 10 PC Adapter MPI USB
Perangkat Lunak Simatic Manager
Simatic Manager adalah paket perangkat lunak yang digunakan untuk memprogram dan
mengonfigurasi PLC Siemens S7-300. Apabila akan membuat suatu pemecahan otomasi
menggunakan Step-7.
Step 7
Sebelum memulai untuk membuat project baru, kita harus mengetahui prosedur
dalam pengoprasian Step 7.
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
75
Pada diagram diatas terdapat dua pilihan langkah dalam membuat project di
Step 7, yang pertama membuat program terlebih dahulu kemudian melakukan
konfigurasi pada hardware, atau sebalikanya dengan cara melakukan konfigurasi
hardware terlebih dahulu kemudian membuat program pada Step 7.
Langkah-langkah dalam membuat project pada Step 7 :
1. Jalankan aplikasi SIMATIC Manager
2. Pada menu File pilih New Project Wizard,
3. Click “ Next”
4. Pilih hardware PLC yang akan digunakan
Mentransfer dan memonitor program pada PLC Siemens S7-300 harus menggunakan
PC Adapter MPI. PC Adapter MPI adalah produk SIEMENS yang digunakan untuk
komunikasi serial antara PLC dengan laptop atau PC.
Gambar 2. 10 PC Adapter MPI USB
Perangkat Lunak Simatic Manager
Simatic Manager adalah paket perangkat lunak yang digunakan untuk memprogram dan
mengonfigurasi PLC Siemens S7-300. Apabila akan membuat suatu pemecahan otomasi
menggunakan Step-7.
Step 7
Sebelum memulai untuk membuat project baru, kita harus mengetahui prosedur
dalam pengoprasian Step 7.
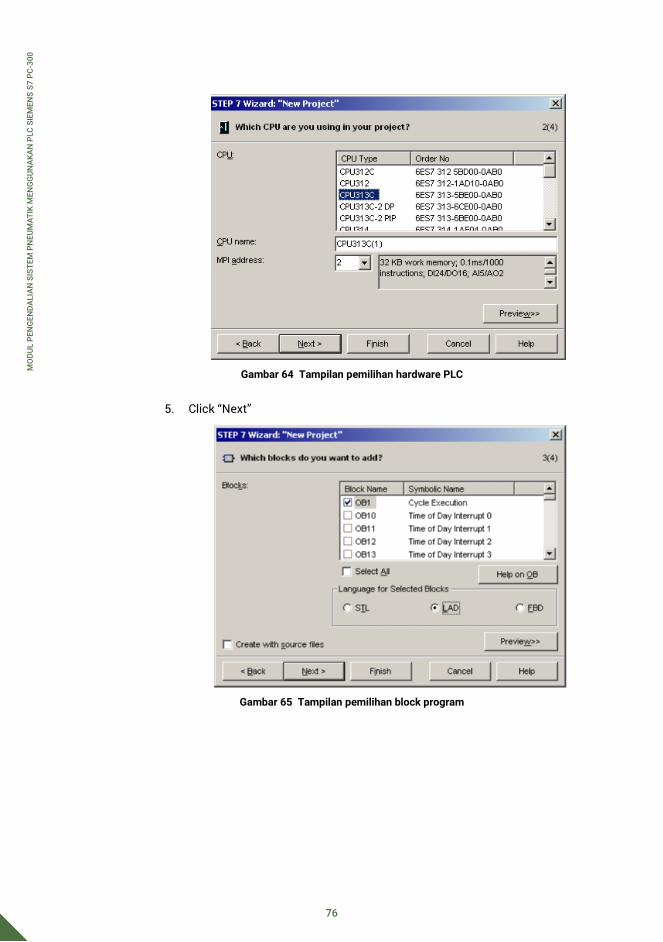
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
76
5. Click “Next”
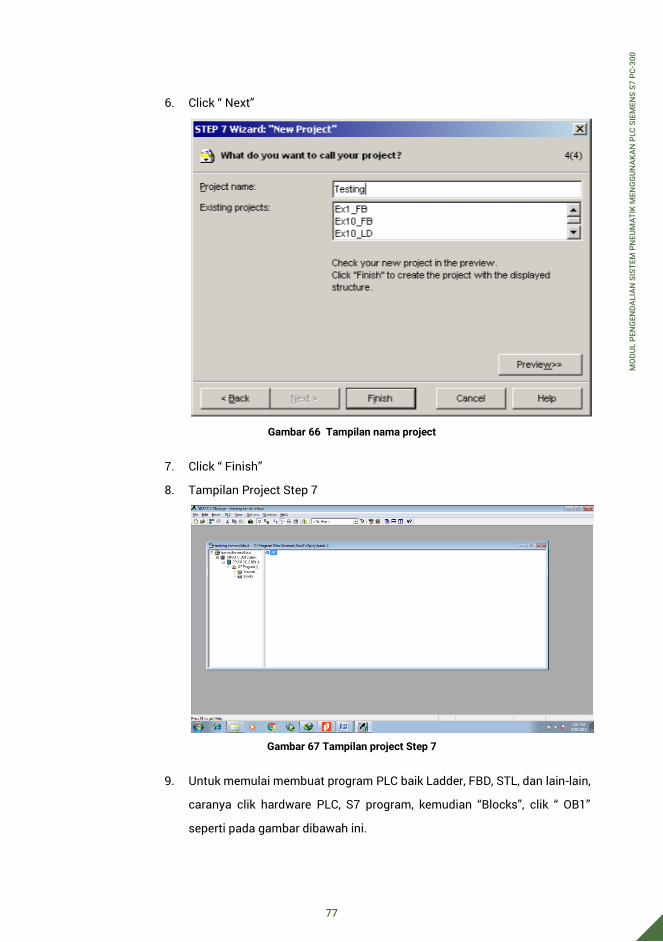
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
77
6. Click “ Next”
7. Click “ Finish”
8. Tampilan Project Step 7
9. Untuk memulai membuat program PLC baik Ladder, FBD, STL, dan lain-lain,
caranya clik hardware PLC, S7 program, kemudian “Blocks”, clik “ OB1”
seperti pada gambar dibawah ini.
5. Click “Next”
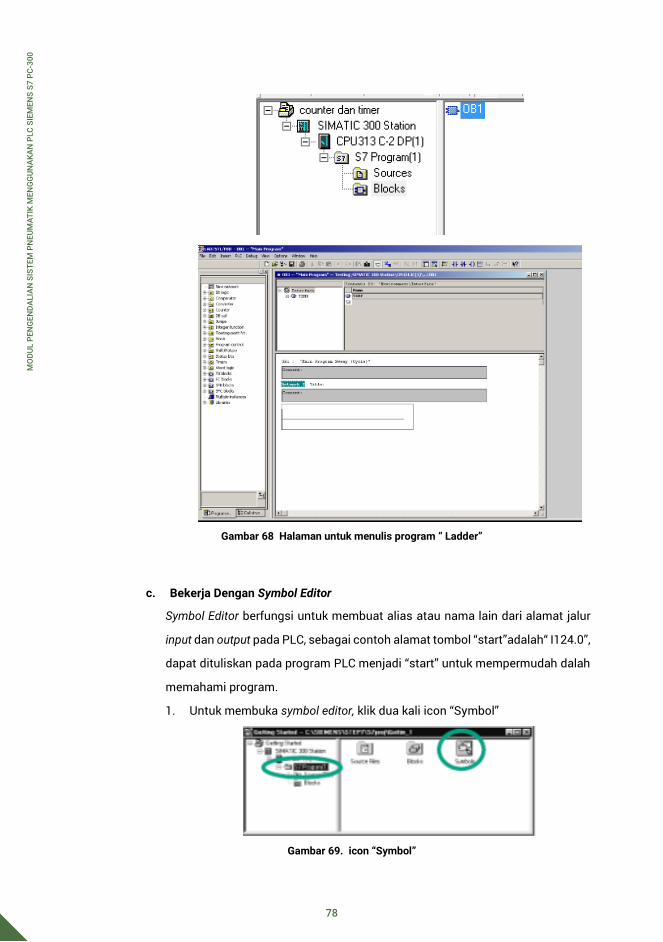
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
78
Halaman untuk menulis program “ Ladder”
Symbol Editor
Symbol Editor berfungsi untuk membuat alias atau nama lain dari alamat jalur
input dan output pada PLC, sebagai contoh alamat tombol “start”adalah“ I124.0”,
dapat dituliskan pada program PLC menjadi “start” untuk mempermudah dalah
memahami program.
1. Untuk membuka symbol editor, klik dua kali icon “Symbol”
. icon “Symbol”
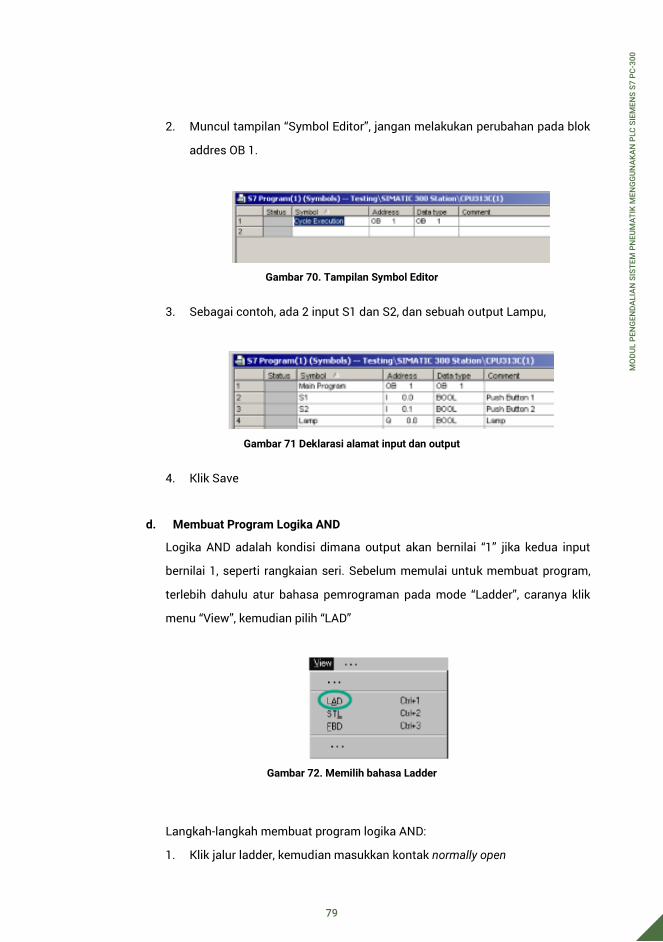
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
79
2. Muncul tampilan “Symbol Editor”, jangan melakukan perubahan pada blok
addres OB 1.
3. Sebagai contoh, ada 2 input S1 dan S2, dan sebuah output Lampu,
4. Klik Save
Logika AND adalah kondisi dimana output akan bernilai “1” jika kedua input
bernilai 1, seperti rangkaian seri. Sebelum memulai untuk membuat program,
terlebih dahulu atur bahasa pemrograman pada mode “Ladder”, caranya klik
menu “View”, kemudian pilih “LAD”
Langkah-langkah membuat program logika AND:
1. Klik jalur ladder, kemudian masukkan kontak normally open
Halaman untuk menulis program “ Ladder”
Symbol Editor
Symbol Editor berfungsi untuk membuat alias atau nama lain dari alamat jalur
input dan output pada PLC, sebagai contoh alamat tombol “start”adalah“ I124.0”,
dapat dituliskan pada program PLC menjadi “start” untuk mempermudah dalah
memahami program.
1. Untuk membuka symbol editor, klik dua kali icon “Symbol”
. icon “Symbol”
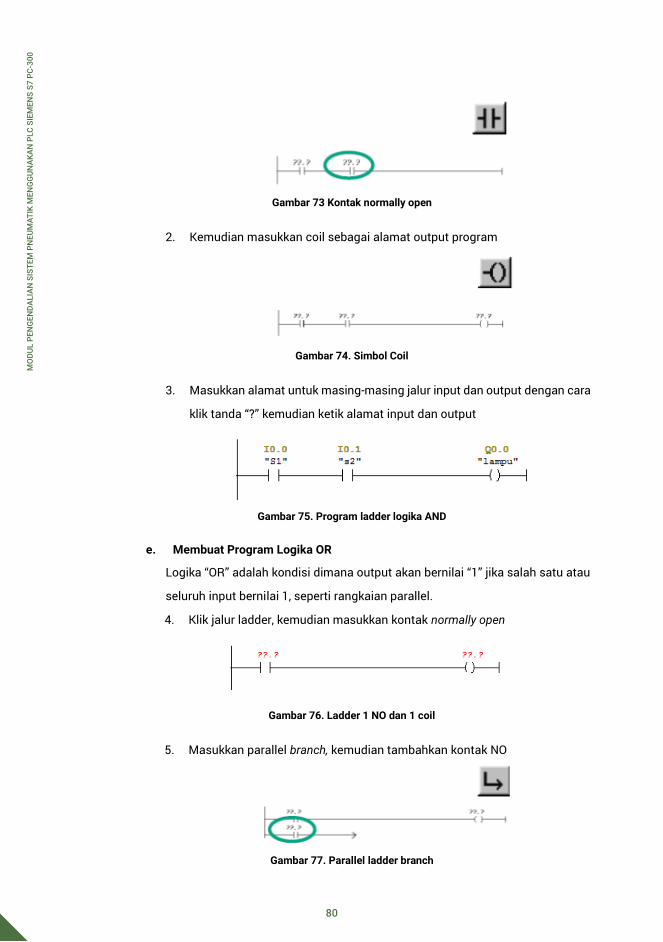
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
80
2. Kemudian masukkan coil sebagai alamat output program
3. Masukkan alamat untuk masing-masing jalur input dan output dengan cara
klik tanda “?” kemudian ketik alamat input dan output
Logika “OR” adalah kondisi dimana output akan bernilai “1” jika salah satu atau
seluruh input bernilai 1, seperti rangkaian parallel.
4. Klik jalur ladder, kemudian masukkan kontak normally open
5. Masukkan parallel branch, kemudian tambahkan kontak NO
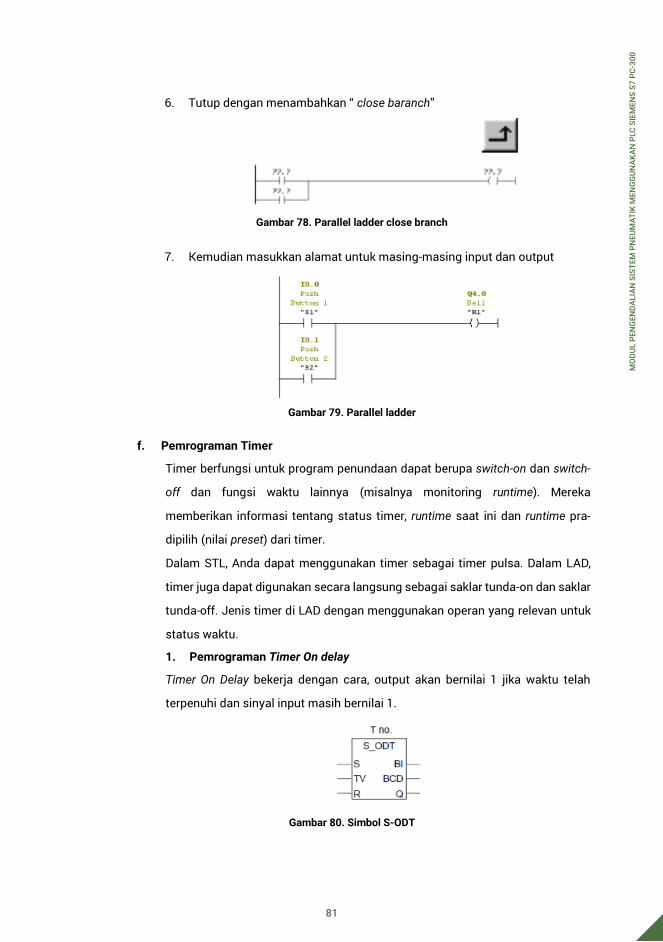
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
81
6. Tutup dengan menambahkan “ close baranch”
7. Kemudian masukkan alamat untuk masing-masing input dan output
Timer berfungsi untuk program penundaan dapat berupa switch-on dan switch-
off dan fungsi waktu lainnya (misalnya monitoring runtime). Mereka
memberikan informasi tentang status timer, runtime saat ini dan runtime pra-
dipilih (nilai preset) dari timer.
Dalam STL, Anda dapat menggunakan timer sebagai timer pulsa. Dalam LAD,
timer juga dapat digunakan secara langsung sebagai saklar tunda-on dan saklar
tunda-off. Jenis timer di LAD dengan menggunakan operan yang relevan untuk
status waktu.
Timer On delay
Timer On Delay bekerja dengan cara, output akan bernilai 1 jika waktu telah
terpenuhi dan sinyal input masih bernilai 1.
2. Kemudian masukkan coil sebagai alamat output program
3. Masukkan alamat untuk masing-masing jalur input dan output dengan cara
klik tanda “?” kemudian ketik alamat input dan output
Logika “OR” adalah kondisi dimana output akan bernilai “1” jika salah satu atau
seluruh input bernilai 1, seperti rangkaian parallel.
4. Klik jalur ladder, kemudian masukkan kontak normally open
5. Masukkan parallel branch, kemudian tambahkan kontak NO
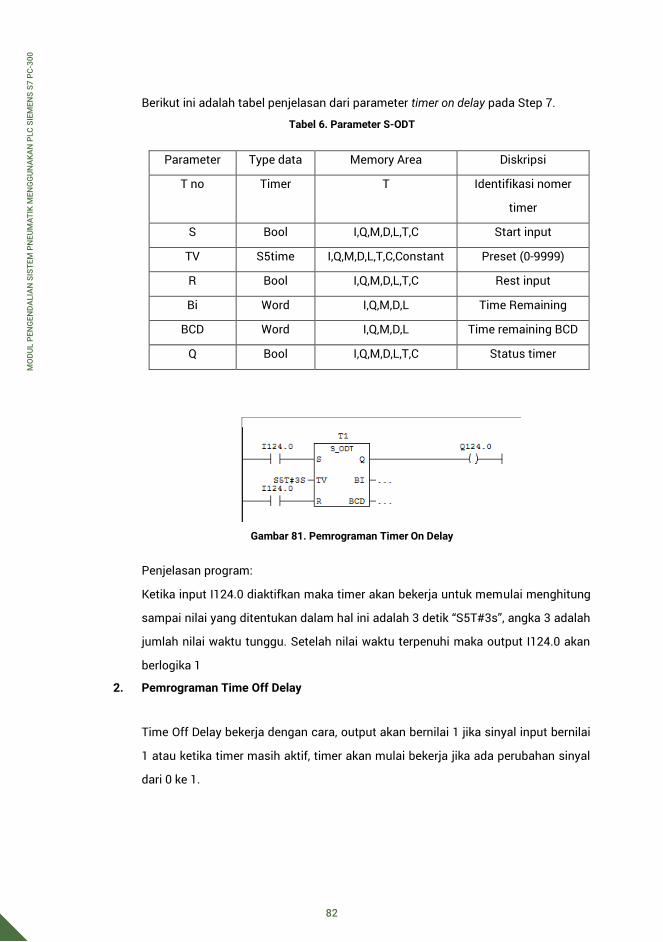
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
82
Parameter Type data Memory Area Diskripsi
T no Timer T Identifikasi nomer
timer
S Bool I,Q,M,D,L,T,C Start input
TV S5time I,Q,M,D,L,T,C,Constant Preset (0-9999)
R Bool I,Q,M,D,L,T,C Rest input
Bi Word I,Q,M,D,L Time Remaining
BCD Word I,Q,M,D,L Time remaining BCD
Q Bool I,Q,M,D,L,T,C Status timer
Penjelasan program:
Ketika input I124.0 diaktifkan maka timer akan bekerja untuk memulai menghitung
sampai nilai yang ditentukan dalam hal ini adalah 5 detik “S5T#5S”, angka 5 adalah
jumlah nilai waktu tunggu. Sebelum nilai waktu terpenuhi maka output Q124.0 akan
berlogika 1. Setelah nilai waktu terpenuhi maka output I124.0 akan berlogika 0.
Berikut ini adalah tabel penjelasan dari parameter timer on delay pada Step 7.
Parameter Type data Memory Area Diskripsi
T no Timer T Identifikasi nomer
timer
S Bool I,Q,M,D,L,T,C Start input
TV S5time I,Q,M,D,L,T,C,Constant Preset (0-9999)
R Bool I,Q,M,D,L,T,C Rest input
Bi Word I,Q,M,D,L Time Remaining
BCD Word I,Q,M,D,L Time remaining BCD
Q Bool I,Q,M,D,L,T,C Status timer
Penjelasan program:
Ketika input I124.0 diaktifkan maka timer akan bekerja untuk memulai menghitung
sampai nilai yang ditentukan dalam hal ini adalah 3 detik “S5T#3s”, angka 3 adalah
jumlah nilai waktu tunggu. Setelah nilai waktu terpenuhi maka output I124.0 akan
berlogika 1
Time Off Delay bekerja dengan cara, output akan bernilai 1 jika sinyal input bernilai
1 atau ketika timer masih aktif, timer akan mulai bekerja jika ada perubahan sinyal
dari 0 ke 1.
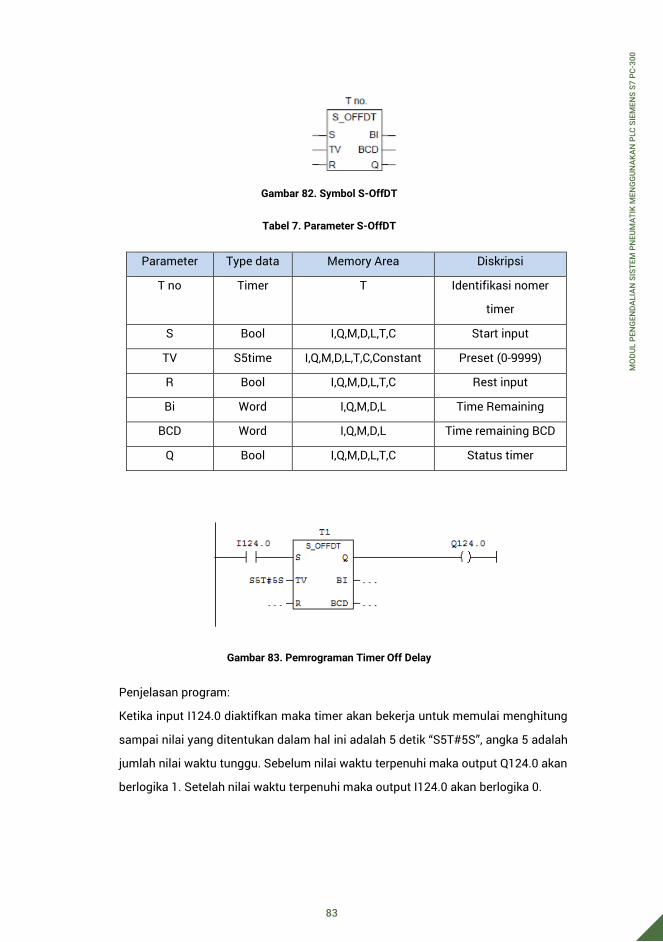
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
83
Parameter Type data Memory Area Diskripsi
T no Timer T Identifikasi nomer
timer
S Bool I,Q,M,D,L,T,C Start input
TV S5time I,Q,M,D,L,T,C,Constant Preset (0-9999)
R Bool I,Q,M,D,L,T,C Rest input
Bi Word I,Q,M,D,L Time Remaining
BCD Word I,Q,M,D,L Time remaining BCD
Q Bool I,Q,M,D,L,T,C Status timer
Penjelasan program:
Ketika input I124.0 diaktifkan maka timer akan bekerja untuk memulai menghitung
sampai nilai yang ditentukan dalam hal ini adalah 5 detik “S5T#5S”, angka 5 adalah
jumlah nilai waktu tunggu. Sebelum nilai waktu terpenuhi maka output Q124.0 akan
berlogika 1. Setelah nilai waktu terpenuhi maka output I124.0 akan berlogika 0.
Berikut ini adalah tabel penjelasan dari parameter timer on delay pada Step 7.
Parameter Type data Memory Area Diskripsi
T no Timer T Identifikasi nomer
timer
S Bool I,Q,M,D,L,T,C Start input
TV S5time I,Q,M,D,L,T,C,Constant Preset (0-9999)
R Bool I,Q,M,D,L,T,C Rest input
Bi Word I,Q,M,D,L Time Remaining
BCD Word I,Q,M,D,L Time remaining BCD
Q Bool I,Q,M,D,L,T,C Status timer
Penjelasan program:
Ketika input I124.0 diaktifkan maka timer akan bekerja untuk memulai menghitung
sampai nilai yang ditentukan dalam hal ini adalah 3 detik “S5T#3s”, angka 3 adalah
jumlah nilai waktu tunggu. Setelah nilai waktu terpenuhi maka output I124.0 akan
berlogika 1
Time Off Delay bekerja dengan cara, output akan bernilai 1 jika sinyal input bernilai
1 atau ketika timer masih aktif, timer akan mulai bekerja jika ada perubahan sinyal
dari 0 ke 1.
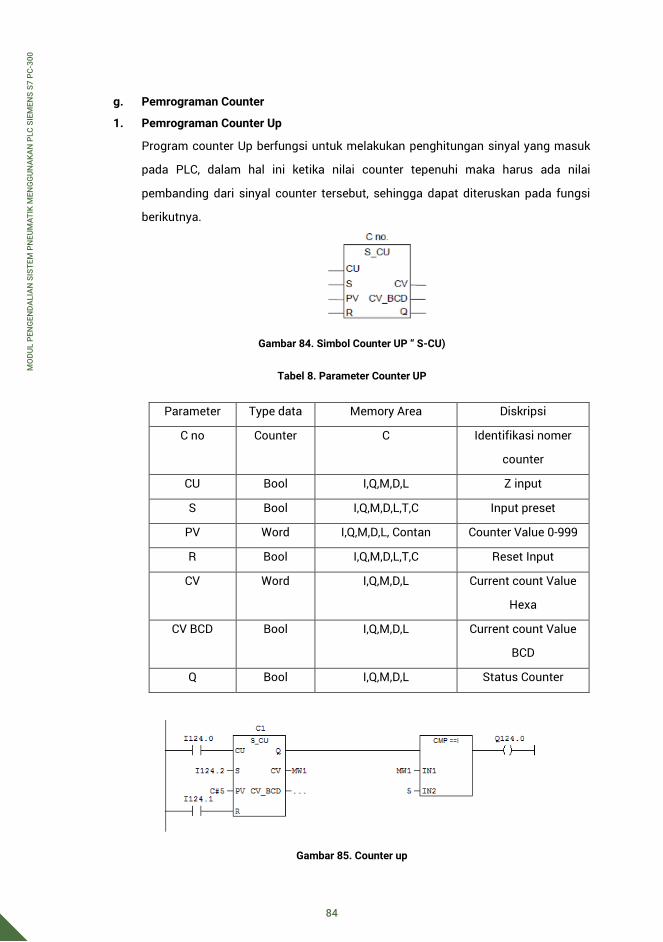
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
84
Ketika sinyal masukan berubah dari 0 ke 1 oleh input I124.2, maka counter diset, jika
sinyal masuk berubah dari 0 ke 1 oleh input I124.0 maka counter mulai untuk
melakukan hitungan naik 1+, sampai nilai counter sama dengan nila value C#5, jika
input I124.1 dirubah dari nilai 0 ke 1 maka nilai counter akan direset menjadi 0, nilai Q
akan bernilai 1 jika nilai counter tidak sama dengan 0. Output Q124.0 akan bernilai 1
jika nilai comparator dan nilai counter sama yaitu 5.
Parameter Type data Memory Area Diskripsi
C no Counter C Identifikasi nomer
counter
CU Bool I,Q,M,D,L Z input
S Bool I,Q,M,D,L,T,C Input preset
PV Word I,Q,M,D,L, Contan Counter Value 0-999
R Bool I,Q,M,D,L,T,C Reset Input
CV Word I,Q,M,D,L Current count Value
Hexa
CV BCD Bool I,Q,M,D,L Current count Value
BCD
Q Bool I,Q,M,D,L Status Counter
Program counter Up berfungsi untuk melakukan penghitungan sinyal yang masuk
pada PLC, dalam hal ini ketika nilai counter tepenuhi maka harus ada nilai
pembanding dari sinyal counter tersebut, sehingga dapat diteruskan pada fungsi
berikutnya.
. Simbol Counter UP “ S
Parameter Type data Memory Area Diskripsi
C no Counter C Identifikasi nomer
counter
CU Bool I,Q,M,D,L Z input
S Bool I,Q,M,D,L,T,C Input preset
PV Word I,Q,M,D,L, Contan Counter Value 0-999
R Bool I,Q,M,D,L,T,C Reset Input
CV Word I,Q,M,D,L Current count Value
Hexa
CV BCD Bool I,Q,M,D,L Current count Value
BCD
Q Bool I,Q,M,D,L Status Counter
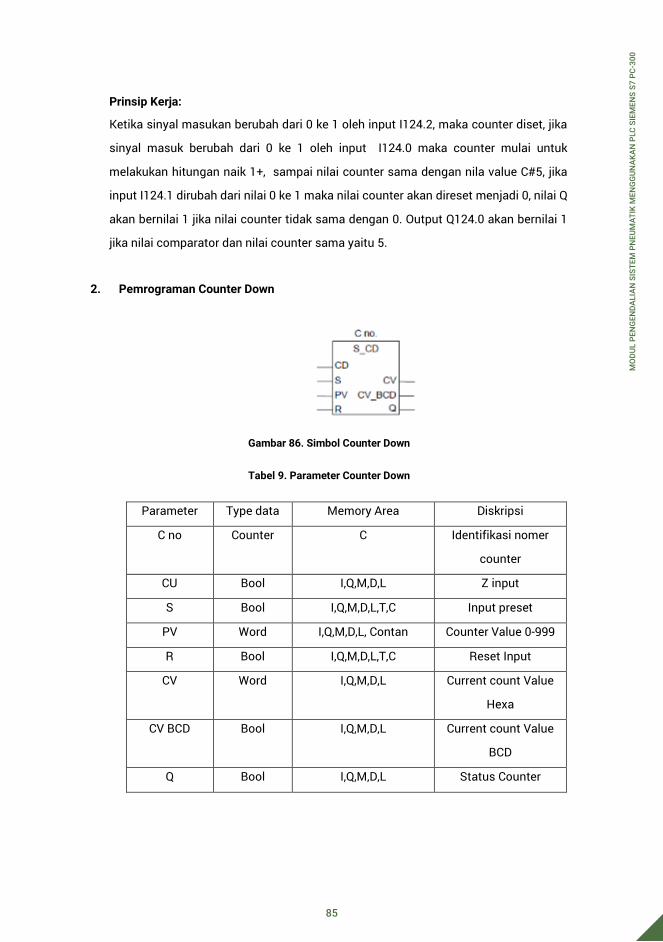
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
85
Ketika sinyal masukan berubah dari 0 ke 1 oleh input I124.2, maka counter diset, jika
sinyal masuk berubah dari 0 ke 1 oleh input I124.0 maka counter mulai untuk
melakukan hitungan naik 1+, sampai nilai counter sama dengan nila value C#5, jika
input I124.1 dirubah dari nilai 0 ke 1 maka nilai counter akan direset menjadi 0, nilai Q
akan bernilai 1 jika nilai counter tidak sama dengan 0. Output Q124.0 akan bernilai 1
jika nilai comparator dan nilai counter sama yaitu 5.
Parameter Type data Memory Area Diskripsi
C no Counter C Identifikasi nomer
counter
CU Bool I,Q,M,D,L Z input
S Bool I,Q,M,D,L,T,C Input preset
PV Word I,Q,M,D,L, Contan Counter Value 0-999
R Bool I,Q,M,D,L,T,C Reset Input
CV Word I,Q,M,D,L Current count Value
Hexa
CV BCD Bool I,Q,M,D,L Current count Value
BCD
Q Bool I,Q,M,D,L Status Counter
Program counter Up berfungsi untuk melakukan penghitungan sinyal yang masuk
pada PLC, dalam hal ini ketika nilai counter tepenuhi maka harus ada nilai
pembanding dari sinyal counter tersebut, sehingga dapat diteruskan pada fungsi
berikutnya.
. Simbol Counter UP “ S
Parameter Type data Memory Area Diskripsi
C no Counter C Identifikasi nomer
counter
CU Bool I,Q,M,D,L Z input
S Bool I,Q,M,D,L,T,C Input preset
PV Word I,Q,M,D,L, Contan Counter Value 0-999
R Bool I,Q,M,D,L,T,C Reset Input
CV Word I,Q,M,D,L Current count Value
Hexa
CV BCD Bool I,Q,M,D,L Current count Value
BCD
Q Bool I,Q,M,D,L Status Counter
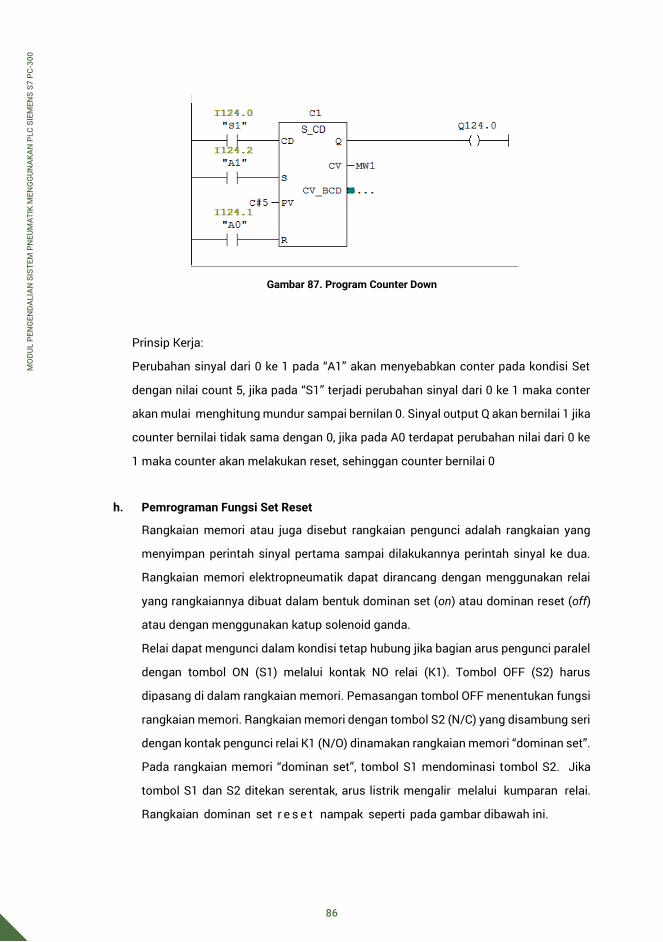
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
86
Prinsip Kerja:
Perubahan sinyal dari 0 ke 1 pada “A1” akan menyebabkan conter pada kondisi Set
dengan nilai count 5, jika pada “S1” terjadi perubahan sinyal dari 0 ke 1 maka conter
akan mulai menghitung mundur sampai bernilan 0. Sinyal output Q akan bernilai 1 jika
counter bernilai tidak sama dengan 0, jika pada A0 terdapat perubahan nilai dari 0 ke
1 maka counter akan melakukan reset, sehinggan counter bernilai 0
Rangkaian memori atau juga disebut rangkaian pengunci adalah rangkaian yang
menyimpan perintah sinyal pertama sampai dilakukannya perintah sinyal ke dua.
Rangkaian memori elektropneumatik dapat dirancang dengan menggunakan relai
yang rangkaiannya dibuat dalam bentuk dominan set (on) atau dominan reset (off)
atau dengan menggunakan katup solenoid ganda.
Relai dapat mengunci dalam kondisi tetap hubung jika bagian arus pengunci paralel
dengan tombol ON (S1) melalui kontak NO relai (K1). Tombol OFF (S2) harus
dipasang di dalam rangkaian memori. Pemasangan tombol OFF menentukan fungsi
rangkaian memori. Rangkaian memori dengan tombol S2 (N/C) yang disambung seri
dengan kontak pengunci relai K1 (N/O) dinamakan rangkaian memori “dominan set”.
Pada rangkaian memori “dominan set”, tombol S1 mendominasi tombol S2. Jika
tombol S1 dan S2 ditekan serentak, arus listrik mengalir melalui kumparan relai.
Rangkaian dominan set r e s e t nampak seperti pada gambar dibawah ini.
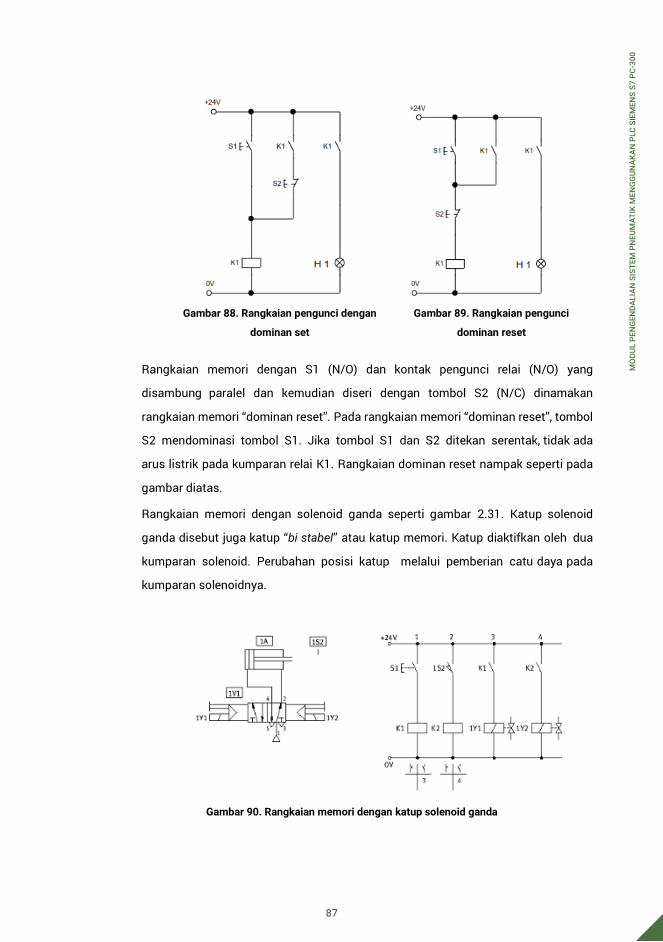
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
87
Rangkaian memori dengan S1 (N/O) dan kontak pengunci relai (N/O) yang
disambung paralel dan kemudian diseri dengan tombol S2 (N/C) dinamakan
rangkaian memori “dominan reset”. Pada rangkaian memori “dominan reset”, tombol
S2 mendominasi tombol S1. Jika tombol S1 dan S2 ditekan serentak, tidak ada
arus listrik pada kumparan relai K1. Rangkaian dominan reset nampak seperti pada
gambar diatas.
Rangkaian memori dengan solenoid ganda seperti gambar 2.31. Katup solenoid
ganda disebut juga katup “bi stabel” atau katup memori. Katup diaktifkan oleh dua
kumparan solenoid. Perubahan posisi katup melalui pemberian catu daya pada
kumparan solenoidnya.
Prinsip Kerja:
Perubahan sinyal dari 0 ke 1 pada “A1” akan menyebabkan conter pada kondisi Set
dengan nilai count 5, jika pada “S1” terjadi perubahan sinyal dari 0 ke 1 maka conter
akan mulai menghitung mundur sampai bernilan 0. Sinyal output Q akan bernilai 1 jika
counter bernilai tidak sama dengan 0, jika pada A0 terdapat perubahan nilai dari 0 ke
1 maka counter akan melakukan reset, sehinggan counter bernilai 0
Rangkaian memori atau juga disebut rangkaian pengunci adalah rangkaian yang
menyimpan perintah sinyal pertama sampai dilakukannya perintah sinyal ke dua.
Rangkaian memori elektropneumatik dapat dirancang dengan menggunakan relai
yang rangkaiannya dibuat dalam bentuk dominan set (on) atau dominan reset (off)
atau dengan menggunakan katup solenoid ganda.
Relai dapat mengunci dalam kondisi tetap hubung jika bagian arus pengunci paralel
dengan tombol ON (S1) melalui kontak NO relai (K1). Tombol OFF (S2) harus
dipasang di dalam rangkaian memori. Pemasangan tombol OFF menentukan fungsi
rangkaian memori. Rangkaian memori dengan tombol S2 (N/C) yang disambung seri
dengan kontak pengunci relai K1 (N/O) dinamakan rangkaian memori “dominan set”.
Pada rangkaian memori “dominan set”, tombol S1 mendominasi tombol S2. Jika
tombol S1 dan S2 ditekan serentak, arus listrik mengalir melalui kumparan relai.
Rangkaian dominan set r e s e t nampak seperti pada gambar dibawah ini.
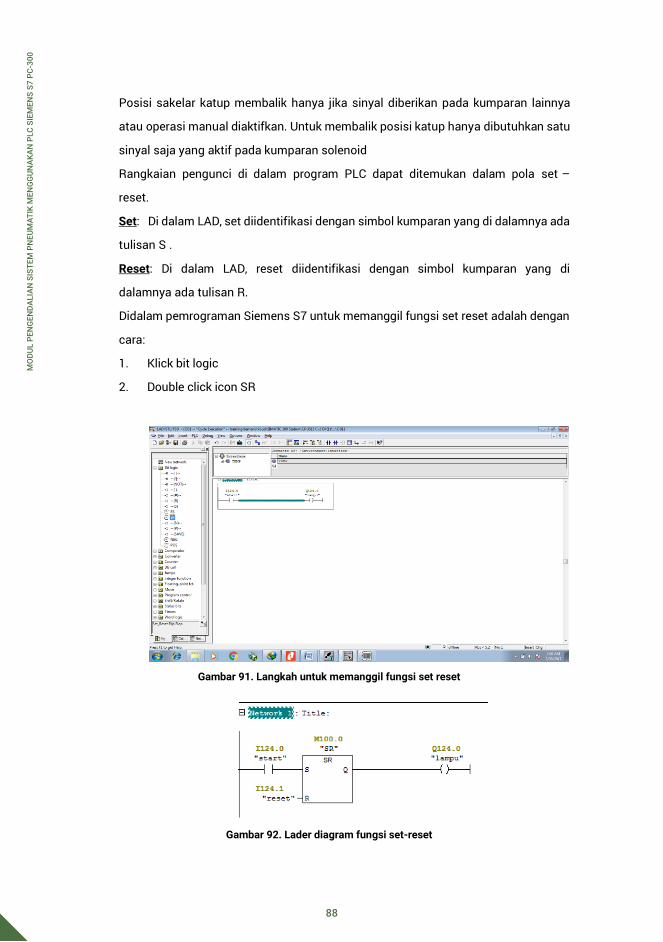
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
88
Pada lader diagram diatas apabila input start diaktifkan (terjadi perubahan nilai dari 0
ke 1) maka ouput lampu akan bernilai 1, apabila input start dinonaktifkan lampu akan
tetap bernilai 1. Untuk membuat lampu bernilai 0, maka input reset harus diaktifkan.
Sebelum mendownlooad program ke PLC pastikan konfigurasi hardware PLC sesuai
dengan konfigurasi hardware deprogram Step 7.
Langkah-langkah dalam download program ke PLC:
1. Menghidupkan PLC, dengan menggunakan saklar On/Off
Posisi sakelar katup membalik hanya jika sinyal diberikan pada kumparan lainnya
atau operasi manual diaktifkan. Untuk membalik posisi katup hanya dibutuhkan satu
sinyal saja yang aktif pada kumparan solenoid
Rangkaian pengunci di dalam program PLC dapat ditemukan dalam pola set –
reset.
: Di dalam LAD, set diidentifikasi dengan simbol kumparan yang di dalamnya ada
tulisan S .
: Di dalam LAD, reset diidentifikasi dengan simbol kumparan yang di
dalamnya ada tulisan R.
Didalam pemrograman Siemens S7 untuk memanggil fungsi set reset adalah dengan
cara:
1. Klick bit logic
2. Double click icon SR
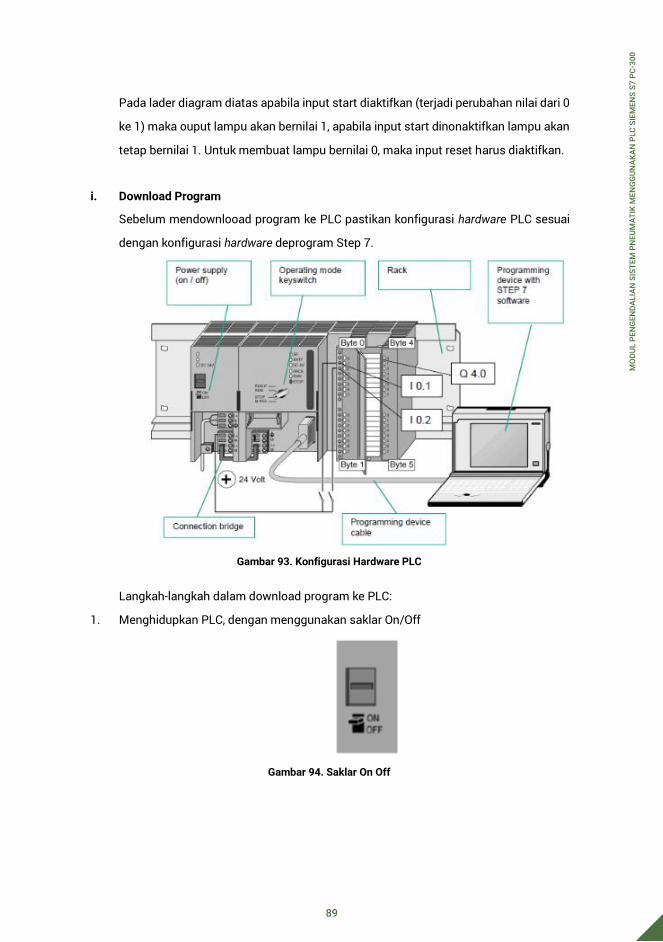
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
89
Pada lader diagram diatas apabila input start diaktifkan (terjadi perubahan nilai dari 0
ke 1) maka ouput lampu akan bernilai 1, apabila input start dinonaktifkan lampu akan
tetap bernilai 1. Untuk membuat lampu bernilai 0, maka input reset harus diaktifkan.
Sebelum mendownlooad program ke PLC pastikan konfigurasi hardware PLC sesuai
dengan konfigurasi hardware deprogram Step 7.
Langkah-langkah dalam download program ke PLC:
1. Menghidupkan PLC, dengan menggunakan saklar On/Off
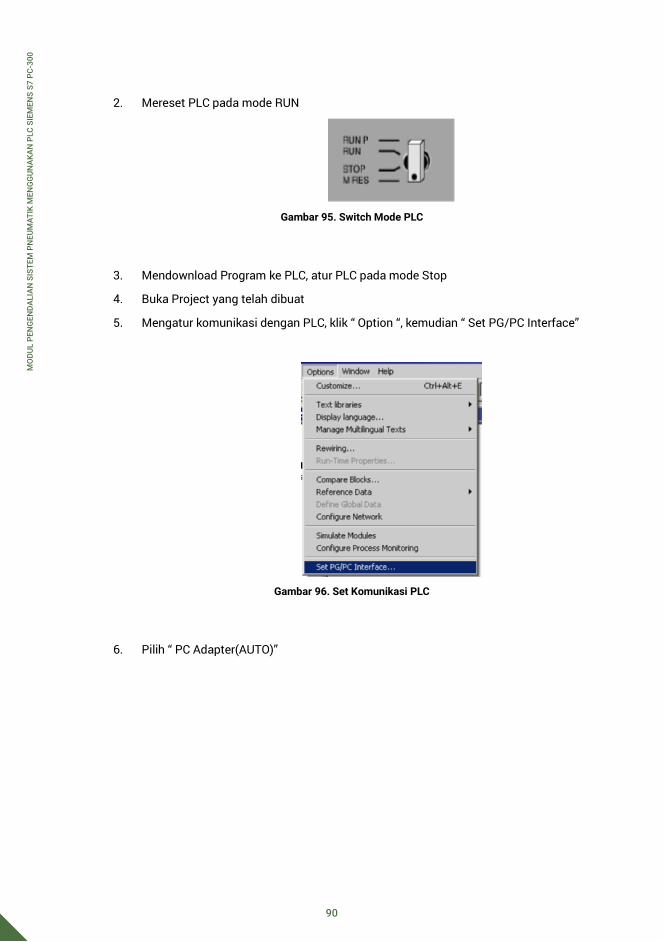
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
90
2. Mereset PLC pada mode RUN
3. Mendownload Program ke PLC, atur PLC pada mode Stop
4. Buka Project yang telah dibuat
5. Mengatur komunikasi dengan PLC, klik “ Option “, kemudian “ Set PG/PC Interface”
6. Pilih “ PC Adapter(AUTO)”
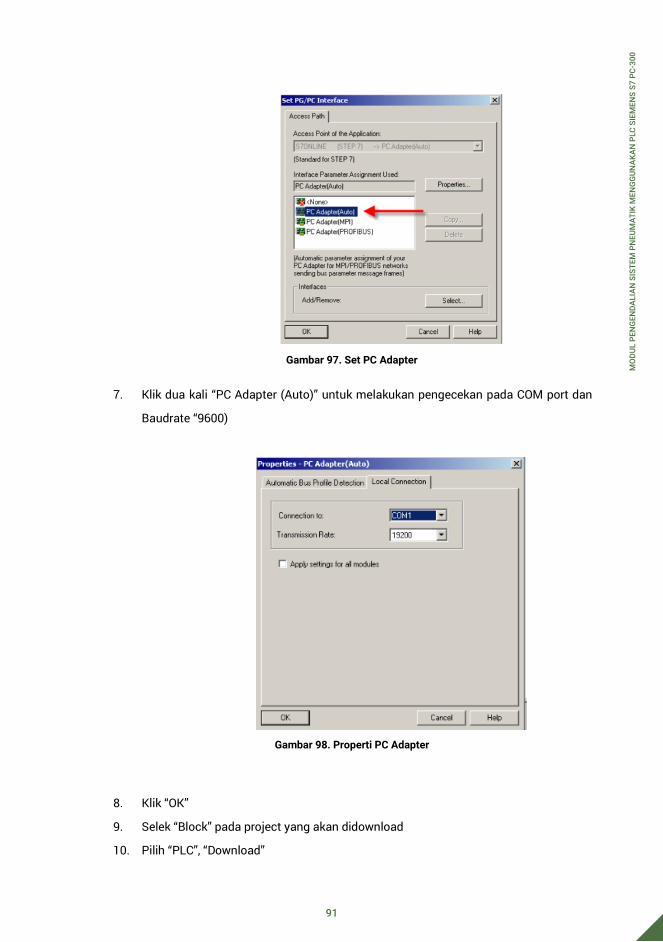
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
91
7. Klik dua kali “PC Adapter (Auto)” untuk melakukan pengecekan pada COM port dan
Baudrate “9600)
8. Klik “OK”
9. Selek “Block” pada project yang akan didownload
10. Pilih “PLC”, “Download”
2. Mereset PLC pada mode RUN
3. Mendownload Program ke PLC, atur PLC pada mode Stop
4. Buka Project yang telah dibuat
5. Mengatur komunikasi dengan PLC, klik “ Option “, kemudian “ Set PG/PC Interface”
6. Pilih “ PC Adapter(AUTO)”
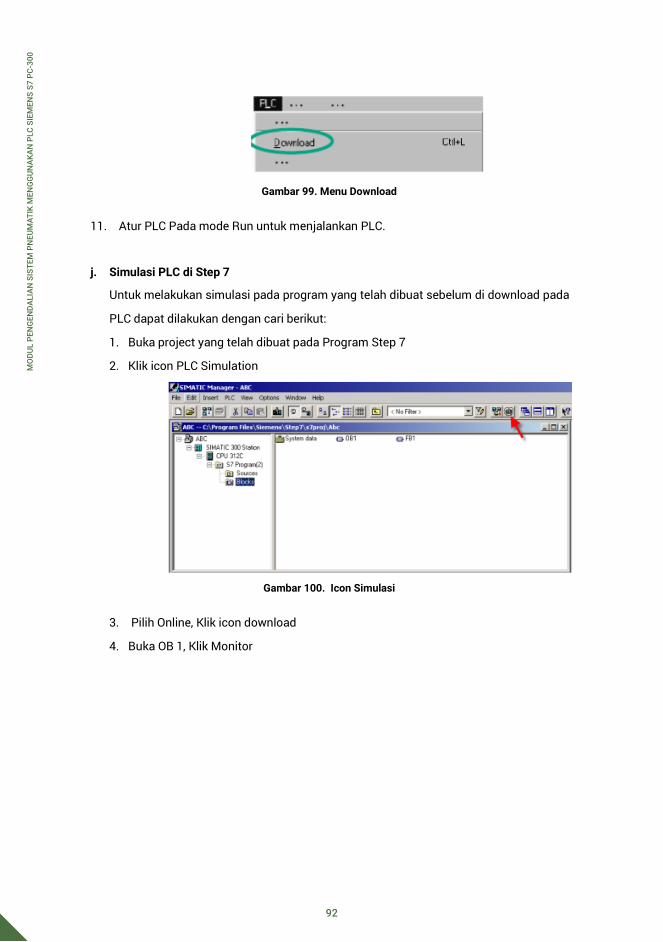
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
92
5. Buka PLCSIM klik “RUN”
6. Inset Input dan Output, klik bit input sesuai yang digunakan pada program.
11. Atur PLC Pada mode Run untuk menjalankan PLC.
Untuk melakukan simulasi pada program yang telah dibuat sebelum di download pada
PLC dapat dilakukan dengan cari berikut:
1. Buka project yang telah dibuat pada Program Step 7
2. Klik icon PLC Simulation
3. Pilih Online, Klik icon download
4. Buka OB 1, Klik Monitor
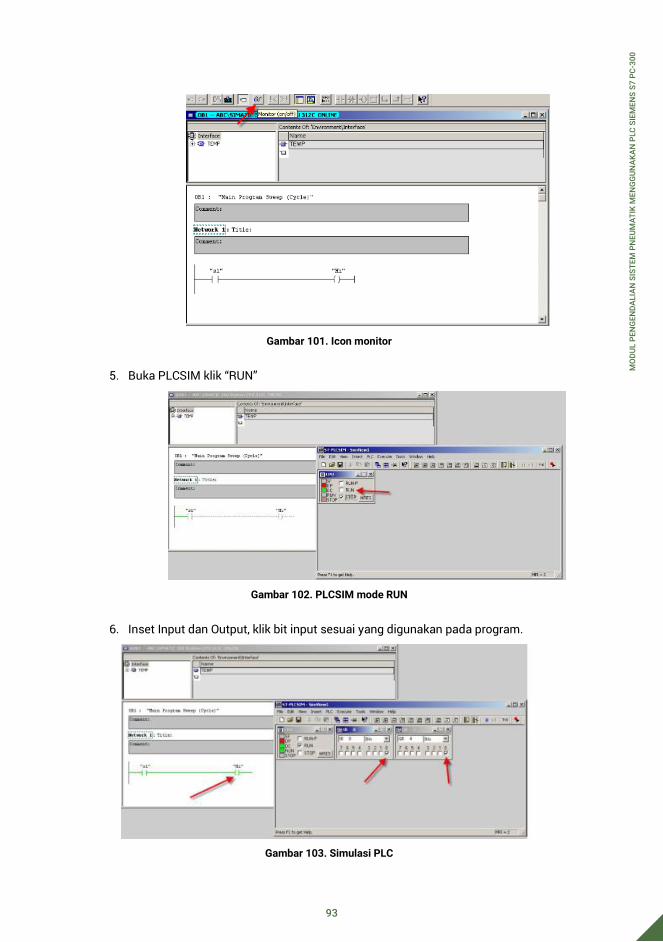
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
93
5. Buka PLCSIM klik “RUN”
6. Inset Input dan Output, klik bit input sesuai yang digunakan pada program.
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
94
1. Dalam melakukan konfigurasi hardware PLC pada Step 7 dapat dilakukan dengan
2 cara, pertama melalui “Project Wizard” dengan hanya memilih jenis CPU, yang
kedua dengan cara manual dengan memasukkan seri dari CPU, I/O, PSU modul
sesuai dengan seri PLC yang akan digunakan
2. Dalam melakukan download program PLC di Step 7 dipastikan bahwa PLC pada
mode “STOP”
3. Simulasi program dapat dilakukan tanpa harus menghubungkan hardware PLC
dengan Step 7 dengan menggunakan aplikasi PLC SIM
Lakukanlah pengamatan pada perangkat hardware PLC Siemens, diskusikan dengan
teman dalam kelompok mengenai:
1. Bagian-bagian dari hardware PLC Siemens
2. Seri Id dari komponen-komponen PLC Siemens
3. Jumlah input dan output pada komponen PLC Siemens
Jawablah Pertanyaan dibawah ini dengan jawaban yang tepat!
1. Jelaskan urutan dari susunan komponen PLC Siemens!
2. Jelaskan langkah-langkah dalam membuat project baru pada Step 7!
3. Jelaskan apakah yang dimaksud dengan file OB1 pada step 7!
4. Tuliskan program pengunci menggunakan software Step 7!
5. Sebutkan mode program pada PLC Siemens!
………………………………………………………………………………………………………………………………………
………………………………………………………………………………………………………………………………………
………………………………………………………………………………………………………………………………………
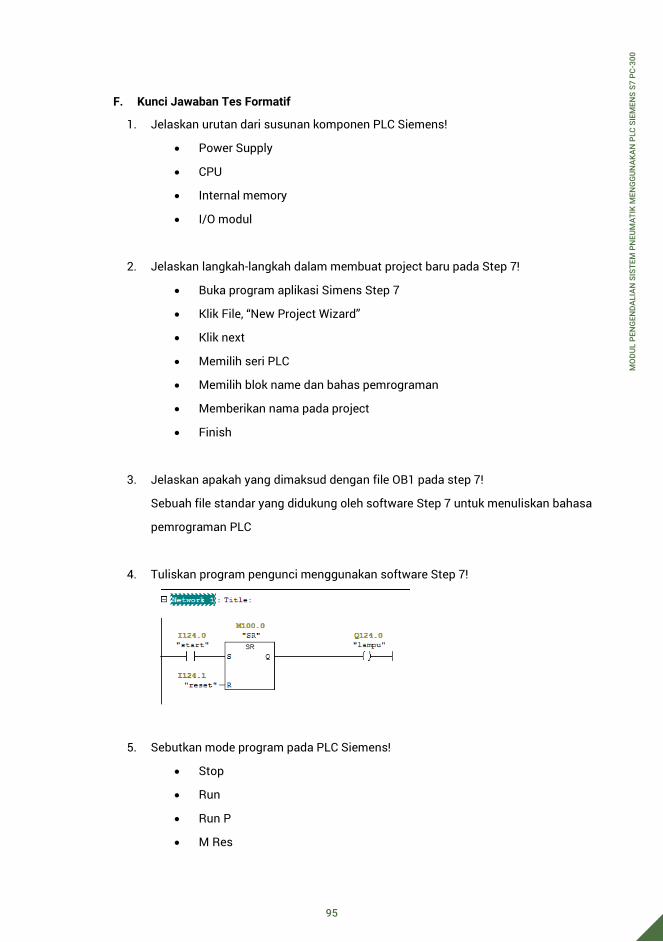
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
95
1. Jelaskan urutan dari susunan komponen PLC Siemens!
Power Supply
CPU
Internal memory
I/O modul
2. Jelaskan langkah-langkah dalam membuat project baru pada Step 7!
Buka program aplikasi Simens Step 7
Klik File, “New Project Wizard”
Klik next
Memilih seri PLC
Memilih blok name dan bahas pemrograman
Memberikan nama pada project
Finish
3. Jelaskan apakah yang dimaksud dengan file OB1 pada step 7!
Sebuah file standar yang didukung oleh software Step 7 untuk menuliskan bahasa
pemrograman PLC
4. Tuliskan program pengunci menggunakan software Step 7!
5. Sebutkan mode program pada PLC Siemens!
Stop
Run
Run P
M Res
1. Dalam melakukan konfigurasi hardware PLC pada Step 7 dapat dilakukan dengan
2 cara, pertama melalui “Project Wizard” dengan hanya memilih jenis CPU, yang
kedua dengan cara manual dengan memasukkan seri dari CPU, I/O, PSU modul
sesuai dengan seri PLC yang akan digunakan
2. Dalam melakukan download program PLC di Step 7 dipastikan bahwa PLC pada
mode “STOP”
3. Simulasi program dapat dilakukan tanpa harus menghubungkan hardware PLC
dengan Step 7 dengan menggunakan aplikasi PLC SIM
Lakukanlah pengamatan pada perangkat hardware PLC Siemens, diskusikan dengan
teman dalam kelompok mengenai:
1. Bagian-bagian dari hardware PLC Siemens
2. Seri Id dari komponen-komponen PLC Siemens
3. Jumlah input dan output pada komponen PLC Siemens
Jawablah Pertanyaan dibawah ini dengan jawaban yang tepat!
1. Jelaskan urutan dari susunan komponen PLC Siemens!
2. Jelaskan langkah-langkah dalam membuat project baru pada Step 7!
3. Jelaskan apakah yang dimaksud dengan file OB1 pada step 7!
4. Tuliskan program pengunci menggunakan software Step 7!
5. Sebutkan mode program pada PLC Siemens!
………………………………………………………………………………………………………………………………………
………………………………………………………………………………………………………………………………………
………………………………………………………………………………………………………………………………………
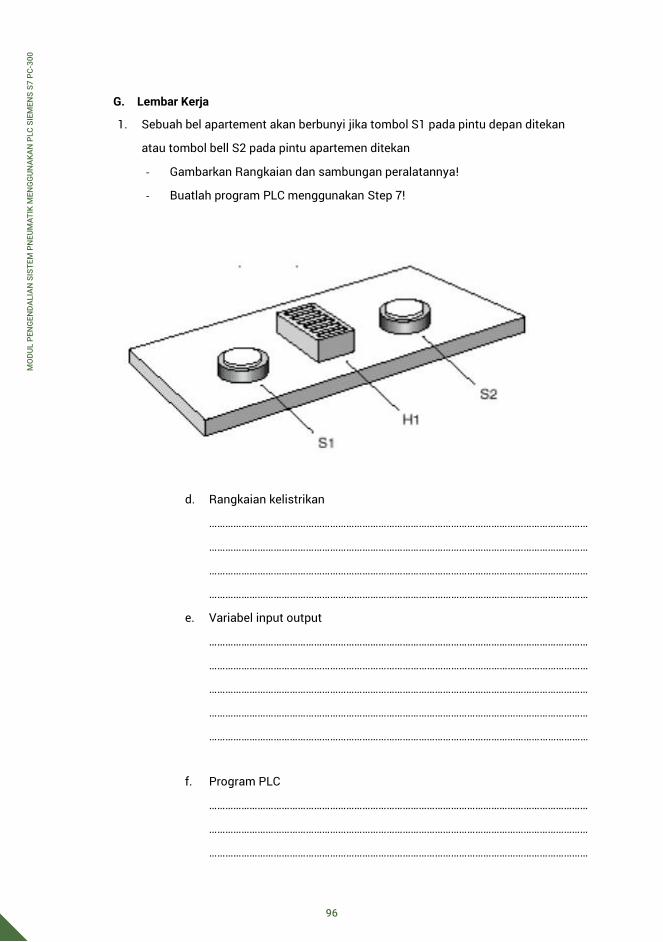
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
96
1. Sebuah bel apartement akan berbunyi jika tombol S1 pada pintu depan ditekan
atau tombol bell S2 pada pintu apartemen ditekan
- Gambarkan Rangkaian dan sambungan peralatannya!
- Buatlah program PLC menggunakan Step 7!
d. Rangkaian kelistrikan
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
e. Variabel input output
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
f. Program PLC
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
97
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
2. Sebuah benda akan dilakukan proses klamping dengan mengaktifkan tombol start
“S1” . ketika benda di klamping oleh silinder 1.0, silinder 2.0 maju dan menekan
benda, setelah itu benda butuh waktu 3 detik untuk proses pendinginan setelah
proses klamping,
Gunakan solenoid tunggal pada silinder 1.0, dan double solenoid pada silinder 2.0.
- Gambarkan Rangkaian kelistrikan dan elektropneumatik dan sambungan
peralatannya!
- Rangkailah komponen-komponen tersebut
- Buatlah program PLC menggunakan Step 7!
1. Sebuah bel apartement akan berbunyi jika tombol S1 pada pintu depan ditekan
atau tombol bell S2 pada pintu apartemen ditekan
- Gambarkan Rangkaian dan sambungan peralatannya!
- Buatlah program PLC menggunakan Step 7!
d. Rangkaian kelistrikan
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
e. Variabel input output
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
f. Program PLC
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
98
a. Rangkaian kelistrikan
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
b. Rangkaian Elektropneumatik
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
c. Variabel input output
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
d. Program PLC
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
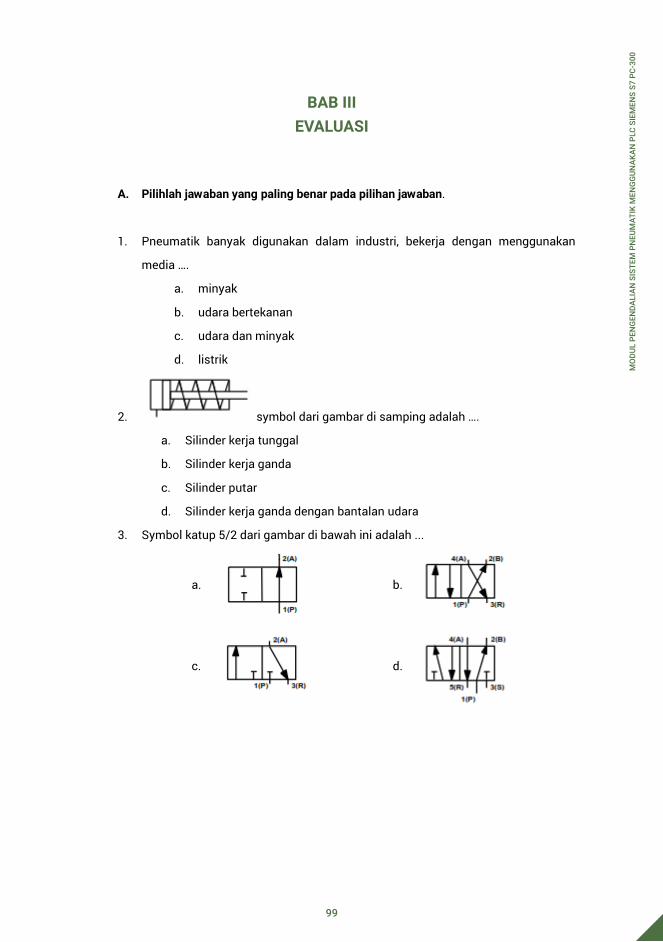
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
99
.
1. Pneumatik banyak digunakan dalam industri, bekerja dengan menggunakan
media ….
a. minyak
b. udara bertekanan
c. udara dan minyak
d. listrik
2. symbol dari gambar di samping adalah ….
a. Silinder kerja tunggal
b. Silinder kerja ganda
c. Silinder putar
d. Silinder kerja ganda dengan bantalan udara
3. Symbol katup 5/2 dari gambar di bawah ini adalah ...
a.
b.
c.
d.
BAB IIIEVALUASI
a. Rangkaian kelistrikan
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
b. Rangkaian Elektropneumatik
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
c. Variabel input output
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
d. Program PLC
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
……………………………………………………………………………………………………………………………
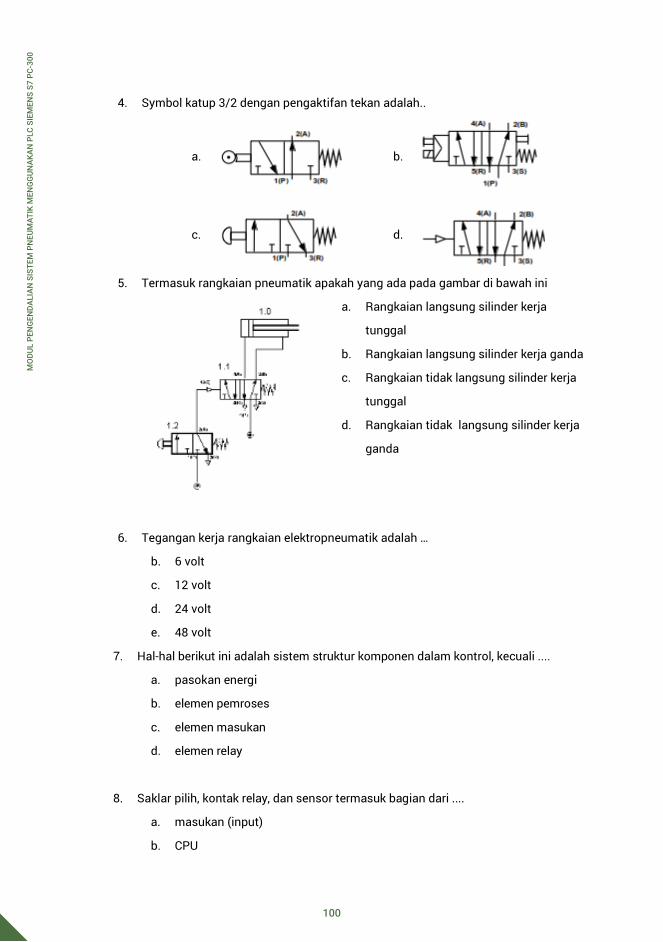
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
100
4. Symbol katup 3/2 dengan pengaktifan tekan adalah..
a.
b.
c.
d.
5. Termasuk rangkaian pneumatik apakah yang ada pada gambar di bawah ini
a. Rangkaian langsung silinder kerja
tunggal
b. Rangkaian langsung silinder kerja ganda
c. Rangkaian tidak langsung silinder kerja
tunggal
d. Rangkaian tidak langsung silinder kerja
ganda
6. Tegangan kerja rangkaian elektropneumatik adalah …
b. 6 volt
c. 12 volt
d. 24 volt
e. 48 volt
7. Hal-hal berikut ini adalah sistem struktur komponen dalam kontrol, kecuali ....
a. pasokan energi
b. elemen pemroses
c. elemen masukan
d. elemen relay
8. Saklar pilih, kontak relay, dan sensor termasuk bagian dari ....
a. masukan (input)
b. CPU
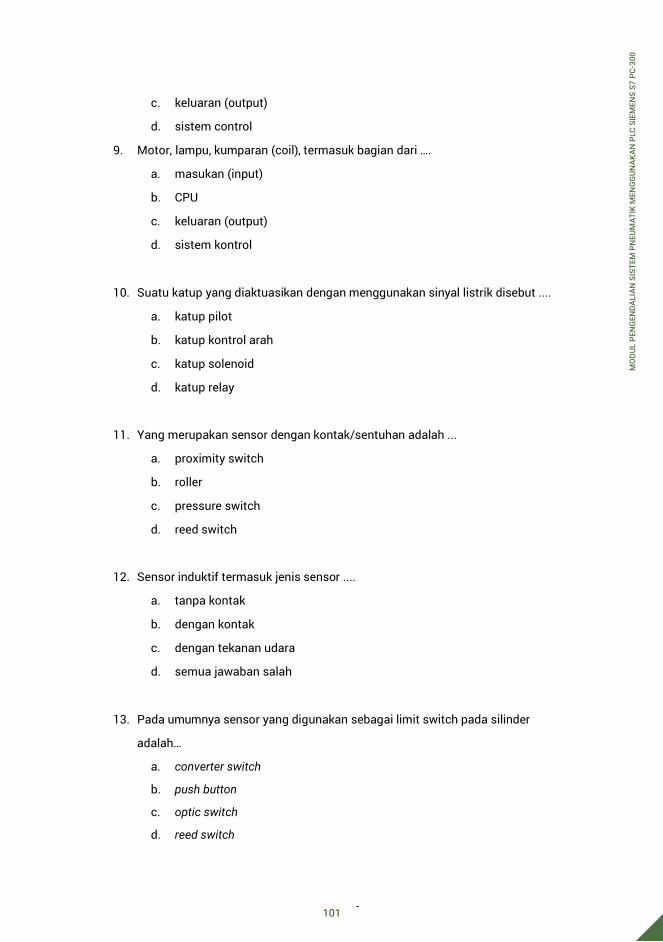
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
101
c. keluaran (output)
d. sistem control
9. Motor, lampu, kumparan (coil), termasuk bagian dari ….
a. masukan (input)
b. CPU
c. keluaran (output)
d. sistem kontrol
10. Suatu katup yang diaktuasikan dengan menggunakan sinyal listrik disebut ....
a. katup pilot
b. katup kontrol arah
c. katup solenoid
d. katup relay
11. Yang merupakan sensor dengan kontak/sentuhan adalah ...
a. proximity switch
b. roller
c. pressure switch
d. reed switch
12. Sensor induktif termasuk jenis sensor ....
a. tanpa kontak
b. dengan kontak
c. dengan tekanan udara
d. semua jawaban salah
13. Pada umumnya sensor yang digunakan sebagai limit switch pada silinder
adalah…
a. converter switch
b. push button
c. optic switch
d. reed switch
4. Symbol katup 3/2 dengan pengaktifan tekan adalah..
a.
b.
c.
d.
5. Termasuk rangkaian pneumatik apakah yang ada pada gambar di bawah ini
a. Rangkaian langsung silinder kerja
tunggal
b. Rangkaian langsung silinder kerja ganda
c. Rangkaian tidak langsung silinder kerja
tunggal
d. Rangkaian tidak langsung silinder kerja
ganda
6. Tegangan kerja rangkaian elektropneumatik adalah …
b. 6 volt
c. 12 volt
d. 24 volt
e. 48 volt
7. Hal-hal berikut ini adalah sistem struktur komponen dalam kontrol, kecuali ....
a. pasokan energi
b. elemen pemroses
c. elemen masukan
d. elemen relay
8. Saklar pilih, kontak relay, dan sensor termasuk bagian dari ....
a. masukan (input)
b. CPU
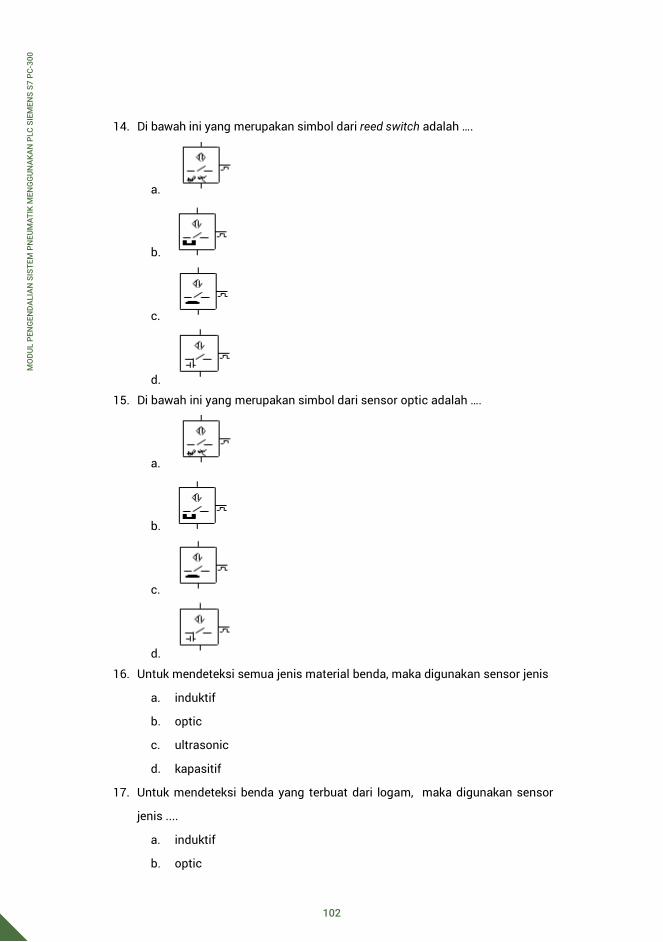
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
102
c. ultrasonic
d. kapasitif
18. PLC merupakan singkatan dari ....
a. Procedure Logic Counter
b. Programmable Logic Controller
c. Processing Logic Controller
d. Programmable Logic Counter
19. Lampu menyala terus menerus jika tombol S1 atau S2 ditekan sesaat. Untuk
mematikan lampu tekan S3. Manakah program kontrol PLC dalam bahasa LAD
yang sesuai?
a.
b.
c.
d.
20. Symbol pneumatic berikut ini merupakan katup control arah jenis …
14. Di bawah ini yang merupakan simbol dari reed switch adalah ….
a.
b.
c.
d.
15. Di bawah ini yang merupakan simbol dari sensor optic adalah ….
a.
b.
c.
d.
16. Untuk mendeteksi semua jenis material benda, maka digunakan sensor jenis
a. induktif
b. optic
c. ultrasonic
d. kapasitif
17. Untuk mendeteksi benda yang terbuat dari logam, maka digunakan sensor
jenis ....
a. induktif
b. optic
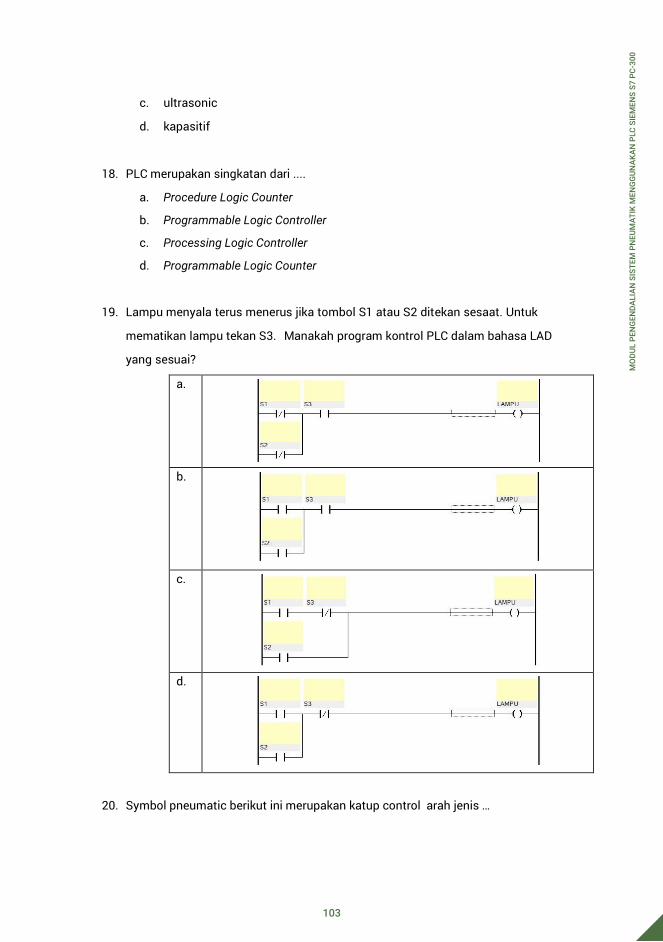
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
103
c. ultrasonic
d. kapasitif
18. PLC merupakan singkatan dari ....
a. Procedure Logic Counter
b. Programmable Logic Controller
c. Processing Logic Controller
d. Programmable Logic Counter
19. Lampu menyala terus menerus jika tombol S1 atau S2 ditekan sesaat. Untuk
mematikan lampu tekan S3. Manakah program kontrol PLC dalam bahasa LAD
yang sesuai?
a.
b.
c.
d.
20. Symbol pneumatic berikut ini merupakan katup control arah jenis …
14. Di bawah ini yang merupakan simbol dari reed switch adalah ….
a.
b.
c.
d.
15. Di bawah ini yang merupakan simbol dari sensor optic adalah ….
a.
b.
c.
d.
16. Untuk mendeteksi semua jenis material benda, maka digunakan sensor jenis
a. induktif
b. optic
c. ultrasonic
d. kapasitif
17. Untuk mendeteksi benda yang terbuat dari logam, maka digunakan sensor
jenis ....
a. induktif
b. optic
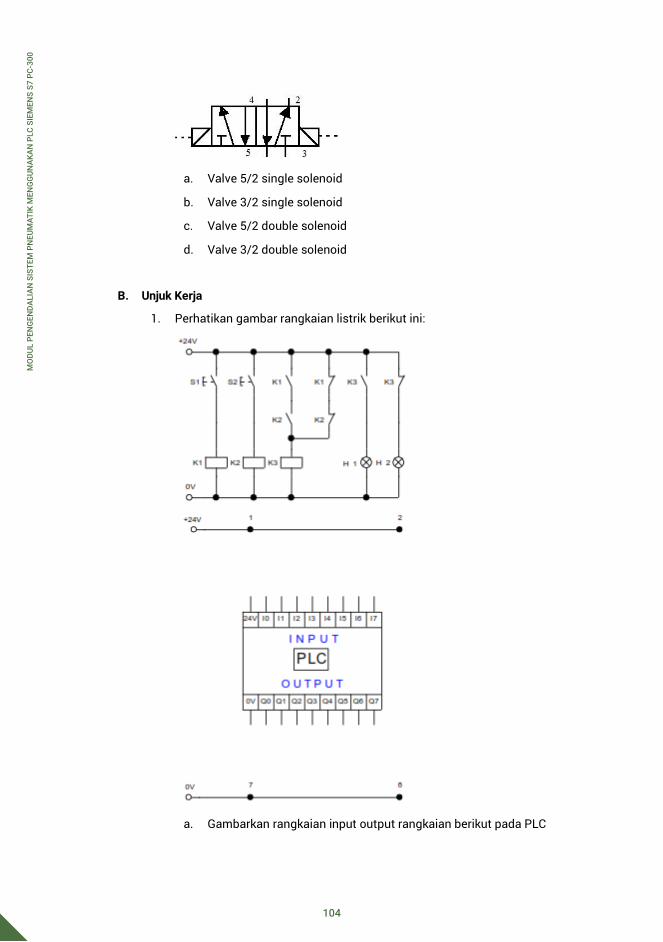
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
104
a. Valve 5/2 single solenoid
b. Valve 3/2 single solenoid
c. Valve 5/2 double solenoid
d. Valve 3/2 double solenoid
1. Perhatikan gambar rangkaian listrik berikut ini:
a. Gambarkan rangkaian input output rangkaian berikut pada PLC
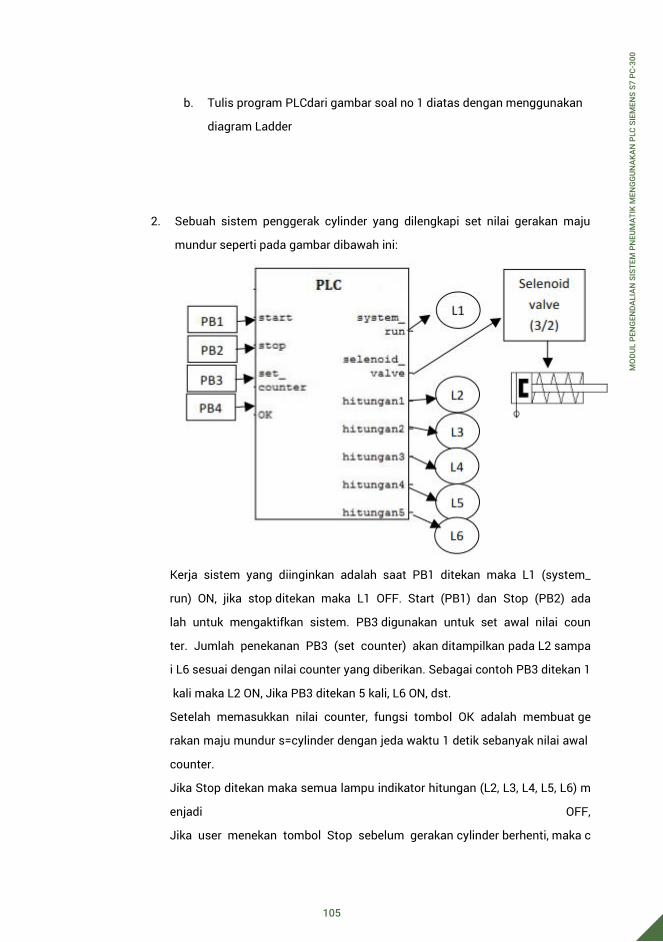
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
105
b. Tulis program PLCdari gambar soal no 1 diatas dengan menggunakan
diagram Ladder
2. Sebuah sistem penggerak cylinder yang dilengkapi set nilai gerakan maju
mundur seperti pada gambar dibawah ini:
Kerja sistem yang diinginkan adalah saat PB1 ditekan maka L1 (system_
run) ON, jika stop ditekan maka L1 OFF. Start (PB1) dan Stop (PB2) ada
lah untuk mengaktifkan sistem. PB3 digunakan untuk set awal nilai coun
ter. Jumlah penekanan PB3 (set counter) akan ditampilkan pada L2 sampa
i L6 sesuai dengan nilai counter yang diberikan. Sebagai contoh PB3 ditekan 1
kali maka L2 ON, Jika PB3 ditekan 5 kali, L6 ON, dst.
Setelah memasukkan nilai counter, fungsi tombol OK adalah membuat ge
rakan maju mundur s=cylinder dengan jeda waktu 1 detik sebanyak nilai awal
counter.
Jika Stop ditekan maka semua lampu indikator hitungan (L2, L3, L4, L5, L6) m
enjadi OFF,
Jika user menekan tombol Stop sebelum gerakan cylinder berhenti, maka c
a. Valve 5/2 single solenoid
b. Valve 3/2 single solenoid
c. Valve 5/2 double solenoid
d. Valve 3/2 double solenoid
1. Perhatikan gambar rangkaian listrik berikut ini:
a. Gambarkan rangkaian input output rangkaian berikut pada PLC
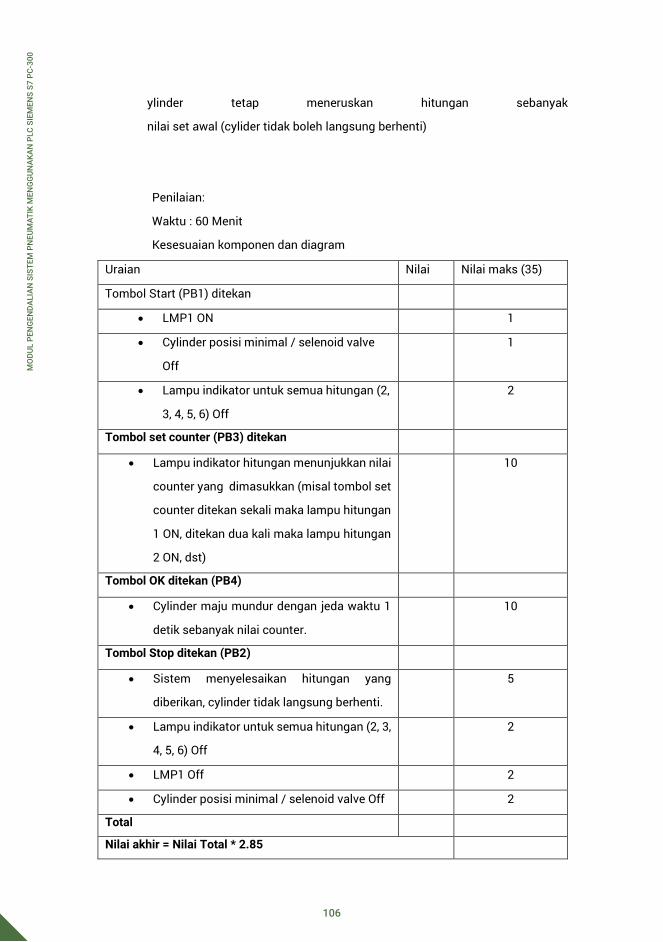
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
106
ylinder tetap meneruskan hitungan sebanyak
nilai set awal (cylider tidak boleh langsung berhenti)
Penilaian:
Waktu : 60 Menit
Kesesuaian komponen dan diagram
Uraian Nilai Nilai maks (35)
Tombol Start (PB1) ditekan
LMP1 ON 1
Cylinder posisi minimal / selenoid valve
Off
1
Lampu indikator untuk semua hitungan (2,
3, 4, 5, 6) Off
2
Lampu indikator hitungan menunjukkan nilai
counter yang dimasukkan (misal tombol set
counter ditekan sekali maka lampu hitungan
1 ON, ditekan dua kali maka lampu hitungan
2 ON, dst)
10
Cylinder maju mundur dengan jeda waktu 1
detik sebanyak nilai counter.
10
Sistem menyelesaikan hitungan yang
diberikan, cylinder tidak langsung berhenti.
5
Lampu indikator untuk semua hitungan (2, 3,
4, 5, 6) Off
2
LMP1 Off 2
Cylinder posisi minimal / selenoid valve Off 2

MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
107
Melalui pembelajaran berbasis modul, diharapkan akan membantu siswa/siswi Sekolah
Menengah Kejuruan dapat belajar secara mandiri, dapat mengukur kemampuan diri
sendiri. Tidak terkecuali dalam memahami konsep Pneumatik, elektropneumatik dan PLC.
Semoga modul ini dapat digunakan sebagai referensi tambahan dalam proses
pembelajaran baik teori maupun praktik. Siswa/siswi dapat mendalami materi lain
disamping materi yang ada pada modul ini melalui berbagai sumber, jurnal maupun
internet. Semoga modul ini bermanfaat khususnya pada program keahlian teknik
Mekatronika.
Pada kesempatan ini, penulis mohon saran dan kritik yang memotivasi penyusun untuk
lebih menyempurnakan modul ini diwaktu yang akan datang.
BAB IVPENUTUP
ylinder tetap meneruskan hitungan sebanyak
nilai set awal (cylider tidak boleh langsung berhenti)
Penilaian:
Waktu : 60 Menit
Kesesuaian komponen dan diagram
Uraian Nilai Nilai maks (35)
Tombol Start (PB1) ditekan
LMP1 ON 1
Cylinder posisi minimal / selenoid valve
Off
1
Lampu indikator untuk semua hitungan (2,
3, 4, 5, 6) Off
2
Lampu indikator hitungan menunjukkan nilai
counter yang dimasukkan (misal tombol set
counter ditekan sekali maka lampu hitungan
1 ON, ditekan dua kali maka lampu hitungan
2 ON, dst)
10
Cylinder maju mundur dengan jeda waktu 1
detik sebanyak nilai counter.
10
Sistem menyelesaikan hitungan yang
diberikan, cylinder tidak langsung berhenti.
5
Lampu indikator untuk semua hitungan (2, 3,
4, 5, 6) Off
2
LMP1 Off 2
Cylinder posisi minimal / selenoid valve Off 2
MO
DUL
PEN
GEN
DALI
AN
SIS
TEM
PN
EUM
ATIK
MEN
GG
UNA
KAN
PLC
SIE
MEN
S S7
PC-
300
108
Frank Ebel, Claus Knoblich, Distribution Station Manual, Festo Didactic GmbH & Co KG,
D-73770 Denkendorf, 2003
Soleh, Miftahu, Perekayasa Sistem mekatronik (system control berbasis relai), VEDC
Malang, 2016
Sudaryono, Perekayasa Sistem Robotika Modular Production System (MPS), VEDC Malang,
2016
Frank Ebel, Distribution Station Assembly, Festo Didactic GmbH & Co, D-73770
Denkendorf, 2002
………, Katalog: Standard cylinder DSNU-8-80-P-A, Festo AG & Co, Esslingen 2002
………, Katalog : Semi-rotary drive DSR-16-180-P, Festo AG & Co, Esslingen 2002
………, Katalog : Suction cup VAS-8-M5-PUR, Festo AG & Co, Esslingen 2002
………, Katalog : Solenoid valve CPV10-M1H-5LS-M7, Festo AG & Co, Esslingen 2002
………, Katalog : Solenoid valve CPV10-M1H-2x3-OLS-M7, Festo AG & Co, Esslingen
2002
………, Katalog : Vacuum generator CPV10-M1H-VI70-2GLS-M7, Festo AG & Co,
Esslingen 2002
………, Katalog : Proximity Sensor SME-8-S-LED-24, Festo AG & Co, Esslingen 2002
………, Katalog : Fibre-optic cable (Optoelectronic sensors) SOEZ-LLK- SE-2,0-M4, Festo
AG & Co, Esslingen 2002
………, Katalog : Fibre-optic device (Optoelectronic sensors) SOEG-L- Q30-P-A-S-2L,
Esslingen 2002
………, Katalog : One-way flow control valve GRLA-M5-QS-4-LF-C , Festo AG & Co,
Esslingen 2002
DAFTAR PUSTAKA




















