
Pengendalian kecepatan Motor Induksi
11
TUGAS DASAR KONVERSI ENERGI ELEKTRIK I. Pendahuluan 1. Motor Induksi Motor induksi merupakan motor arus bolak-balik yang mempunyai penggunaan paling luas, terutama pada industri. Motor induksi ini mempunyai beberapa kelebihan, antara lain mempunyai kontruksi yang kokoh dan sederhana, pemeliharaan yang relatif mudah. Motor induksi terdiri dari dua bagian utama, yaitu stator dan rotor. Bagian rotor ini terdiri atas dua jenis,yaitu rotor sangkar (squirrel cage) danrotor belitan (wound rotor). Motor induksi rotor sangkar mempunyai rotor dengan kumparan yang terdiri atas beberapa konduktor yang disusun menyerupai sangkar tupai. Sedangkan rotor belitan terdiri dari tiga buah belitan yang tersusun dengan hubungan bintang (Y). Gambar Motor Induksi Sumber : Google Image Pada prinsispnya motor induksi dapat diputar dengan beberapa cara yaitu secara konvensional dan Pengendalian Kecepatan Motor Induksi Page 1
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Pengendalian kecepatan Motor Induksi
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
I. Pendahuluan
1. Motor Induksi
Motor induksi merupakan motor arus bolak-balik
yang mempunyai penggunaan paling luas, terutama pada
industri. Motor induksi ini mempunyai beberapa
kelebihan, antara lain mempunyai kontruksi yang kokoh
dan sederhana, pemeliharaan yang relatif mudah. Motor
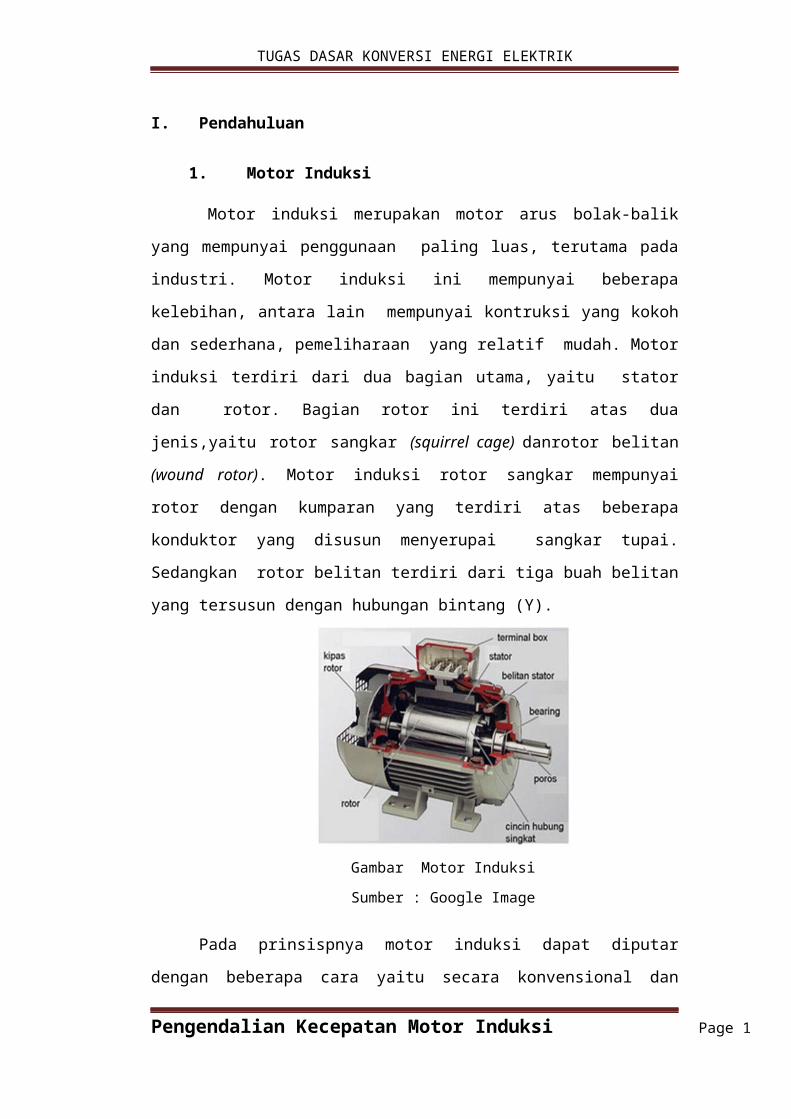
induksi terdiri dari dua bagian utama, yaitu stator
dan rotor. Bagian rotor ini terdiri atas dua
jenis,yaitu rotor sangkar (squirrel cage) danrotor belitan
(wound rotor). Motor induksi rotor sangkar mempunyai
rotor dengan kumparan yang terdiri atas beberapa
konduktor yang disusun menyerupai sangkar tupai.
Sedangkan rotor belitan terdiri dari tiga buah belitan
yang tersusun dengan hubungan bintang (Y).
Gambar Motor Induksi
Sumber : Google Image
Pada prinsispnya motor induksi dapat diputar
dengan beberapa cara yaitu secara konvensional dan
Pengendalian Kecepatan Motor Induksi Page 1
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
terkontrol antara lain kecepatannya, torka dan lain-
lain. Untuk memutar motor induksi secara konvensional
dapat dilakukan dengan metode Start Direct On Lline (DOL),
dikembangkan menjadi putar maju mundur, tetapi dengan
metode konvensional terdapat beberapa kendala antara
lain adalah arus start-nya besar, tidak dapat dikontrol
putarannya, tidak dapat dikontrol torkanya. Untuk
mengatasi permasalahan itu maka dimunculkan metode
pengendalian kecepatan putaran motor induksi ini
dilakukan dengan beberapa macam cara diantaranya
mengatur tegangan dan frekuensi inverter secara
bersamaan. II. Pengendalian Kecepatan Motor Induksi
1. Mengubah Pasang Kutub
Kecepatan putar pada motor AC (Bolak Balik) dapat
dihitung dengan rumus seperti dibawah:
ns = 120fp
Dimana :
ns = Kecepatan Putar Dari Medan Putar Stator (rpm)
f = Frekuensi (Hz atau cps)
p = Jumlah Pasang Kutub Pada Motor
Dari persamaan diatas dapat diketahui bahwa untuk
mendapatkan besarnya putaran medan stator dapat dengan
menambah atau mengurangi jumlah pasang kutubnya.
Pengendalian Kecepatan Motor Induksi Page 2
Pada saat pasang kutubnya empat:
Pada saat pasang kutubnya dua
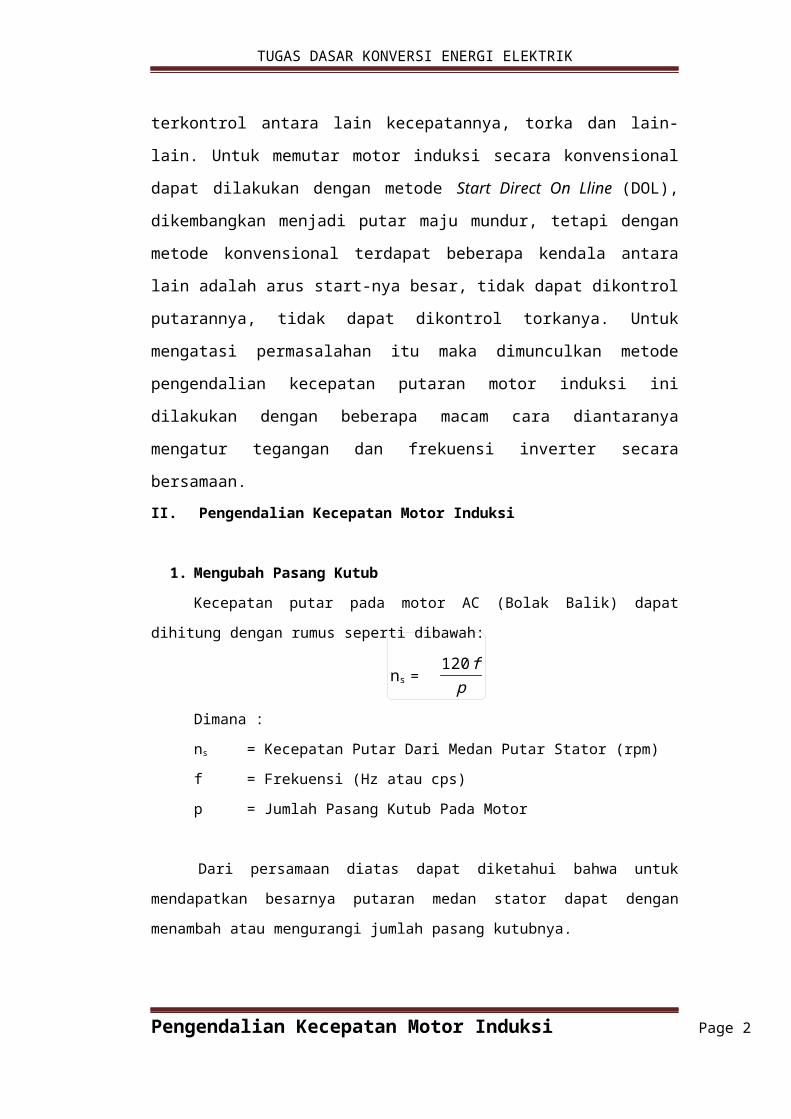
ns = 120fp
ns = 120x50
2 = 3000 rpm
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
Namun putaran yang dihasilkan tidak bisa tepat seperti
putaran yang diinginkan dalam artian putaran yang dihasilkan
secara kasar tidak dengan sehalus seperti pada pengendalian
motor induksi dengan pengaturan frekuensi input.
Contoh Soal :
1. Suatu motor induksi tiga fasa diberi frekuensi 50 Hz.
Hitunglah kecepatan medan putar stator (ns) jika
jumlah pasang kutub pada motor ialah empat pasang
kutub dan jika jumlah pasang kutubnnya hanya dua
pasang kutub ?.
Jawab :
ns = 120fp
ns = 120x50
4 = 1500 rpm
↔ Berdasarkan Data perhitungan dapat dilaihat bahwa
semakin banyak pasang kutubnya maka putaran medan
stator nya akan semakin kecil, begitu juga sebaliknya
semakin sedikit pasang kutubnya maka ns juga akan
bertambah.
2. Mengatur Frekuensi
Salah satu pengaturan kecepatan motor induksi ini
dapat dilakukan dengan cara mengatur frekuensi yang
masuk ke motor. Dengan kemajua teknologi, maka cara ini
sudah sangat mudah dilakukan. Bila frekuensi sumber
Pengendalian Kecepatan Motor Induksi Page 3
E = 4.44 frNφ
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
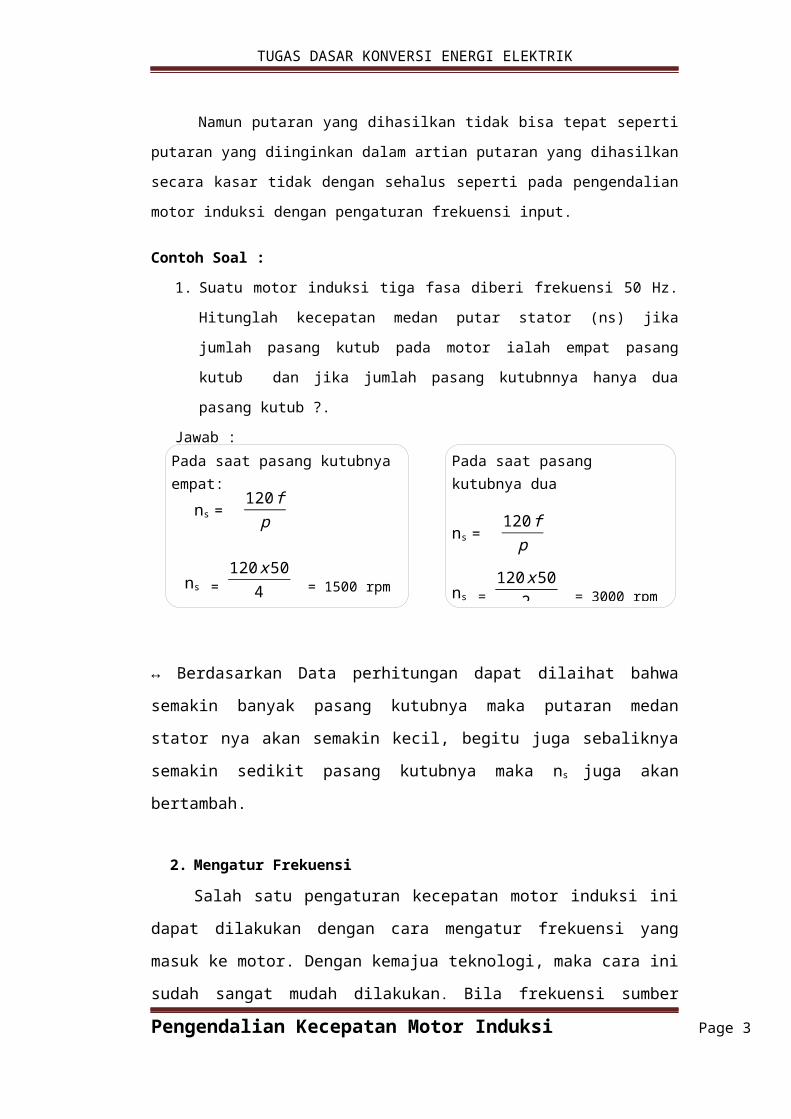
yang diberikan ke motor semakin besar, maka motor akan
berputar semakin cepat. Tetapi bila frekuensi sumber
yang diberikan ke motor semakin rendah, maka motor akan
berputar semakin lambat.
Gambar Struktur Inverter
Kecepatan putaran medan magnet motor induksi akan
dipengaruhi oleh frekuensi sumber yang masuk ke motor
dengan mengacu ke persamaan di bawah sebagai berikut :
ns = 120fp
Dimana :
f = frekuensi sumber AC (Hz)
p = jumlah kutub yang terbentuk pada motor
ns = kecepatan putaran medan magnet stator
(putaran/menit, rpm)
Tegangan induksi E yang timbul pada rotor, dinyatakan
oleh persamaan
φ : fluks motor
E : tegangan rotor
Pengendalian Kecepatan Motor Induksi Page 4
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
fr : frekuensi rotor
N : jumlah lilitan pole pitch
Putaran medan magnet stator ini akan diikuti oleh
putaran rotor motor induksi. Makin berat beban motor,
maka kecepatan rotor juga akan turun sehingga terjadi
slip (s) , seperti yang diperlihatkan pada persamaan
berikut:
S = ns−nr
S=ns−nr
nr
S = ns–nrnr
x100% ....... Dalam
Persen
Dimana :
S = Slip ( % )
nr = kecepatan putaran rotor pada motor (rpm)
ns = kecepatan putaran medan magnet stator
(putaran/menit, rpm)
adapun kita bisa menghitung besarnya frekuensi baru
berdasarkan slip yaitu :
fr (f ’) = S . f
Dimana :
fr (f ’) = Frekuensi Baru (Hz)
S= Slip
Pengendalian Kecepatan Motor Induksi Page 5
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
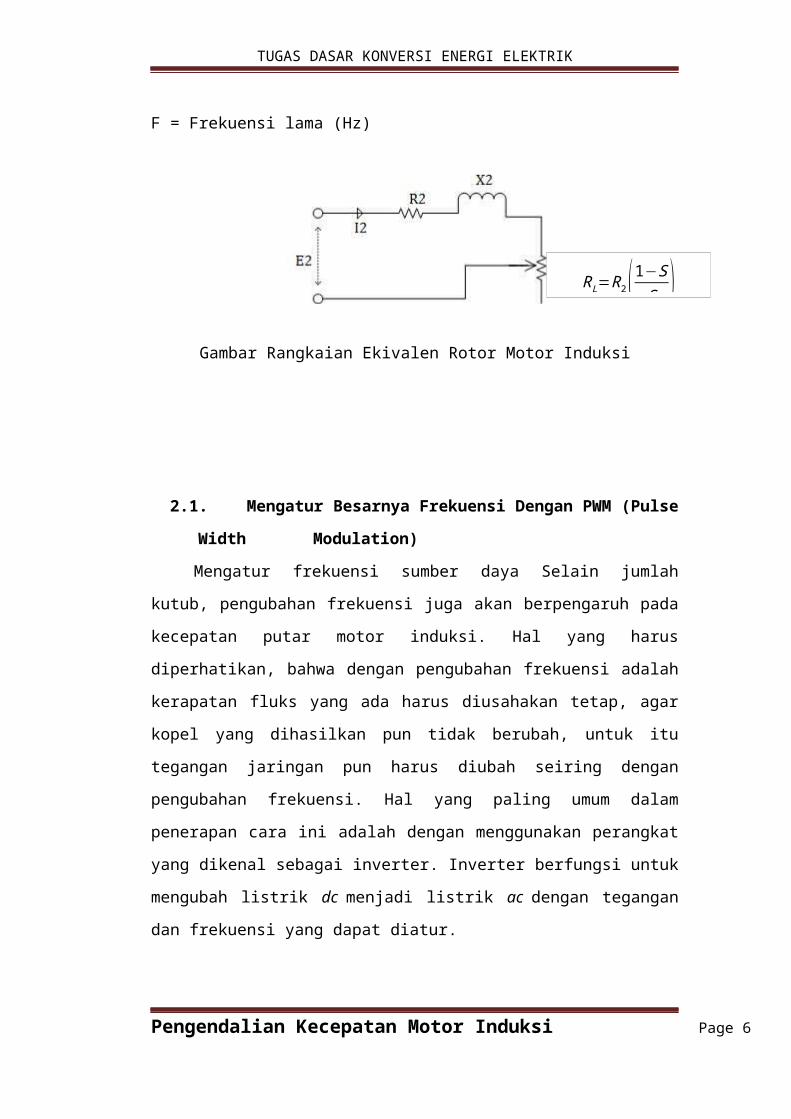
F = Frekuensi lama (Hz)
Gambar Rangkaian Ekivalen Rotor Motor Induksi
2.1. Mengatur Besarnya Frekuensi Dengan PWM (Pulse
Width Modulation)
Mengatur frekuensi sumber daya Selain jumlah
kutub, pengubahan frekuensi juga akan berpengaruh pada
kecepatan putar motor induksi. Hal yang harus
diperhatikan, bahwa dengan pengubahan frekuensi adalah
kerapatan fluks yang ada harus diusahakan tetap, agar
kopel yang dihasilkan pun tidak berubah, untuk itu
tegangan jaringan pun harus diubah seiring dengan
pengubahan frekuensi. Hal yang paling umum dalam
penerapan cara ini adalah dengan menggunakan perangkat
yang dikenal sebagai inverter. Inverter berfungsi untuk
mengubah listrik dc menjadi listrik ac dengan tegangan
dan frekuensi yang dapat diatur.
Pengendalian Kecepatan Motor Induksi Page 6
RL=R2(1−SS )
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
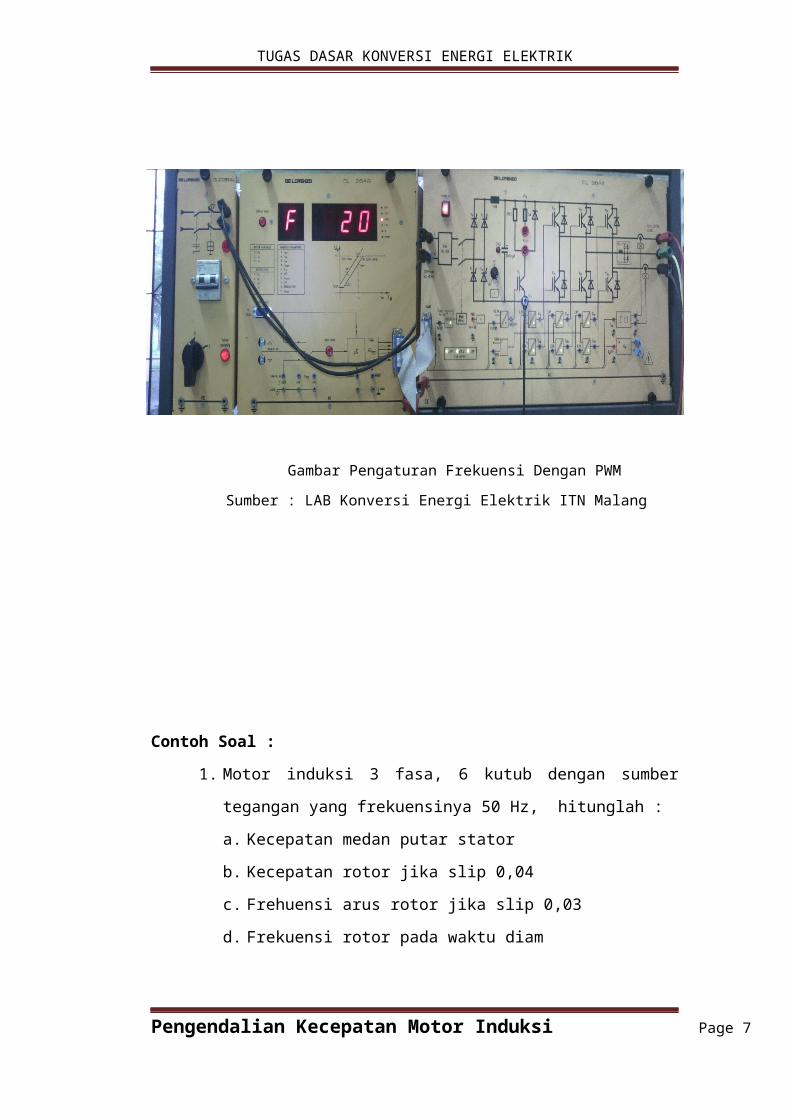
Gambar Pengaturan Frekuensi Dengan PWM
Sumber : LAB Konversi Energi Elektrik ITN Malang
Contoh Soal :
1. Motor induksi 3 fasa, 6 kutub dengan sumber
tegangan yang frekuensinya 50 Hz, hitunglah :
a. Kecepatan medan putar stator
b. Kecepatan rotor jika slip 0,04
c. Frehuensi arus rotor jika slip 0,03
d. Frekuensi rotor pada waktu diam
Pengendalian Kecepatan Motor Induksi Page 7
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
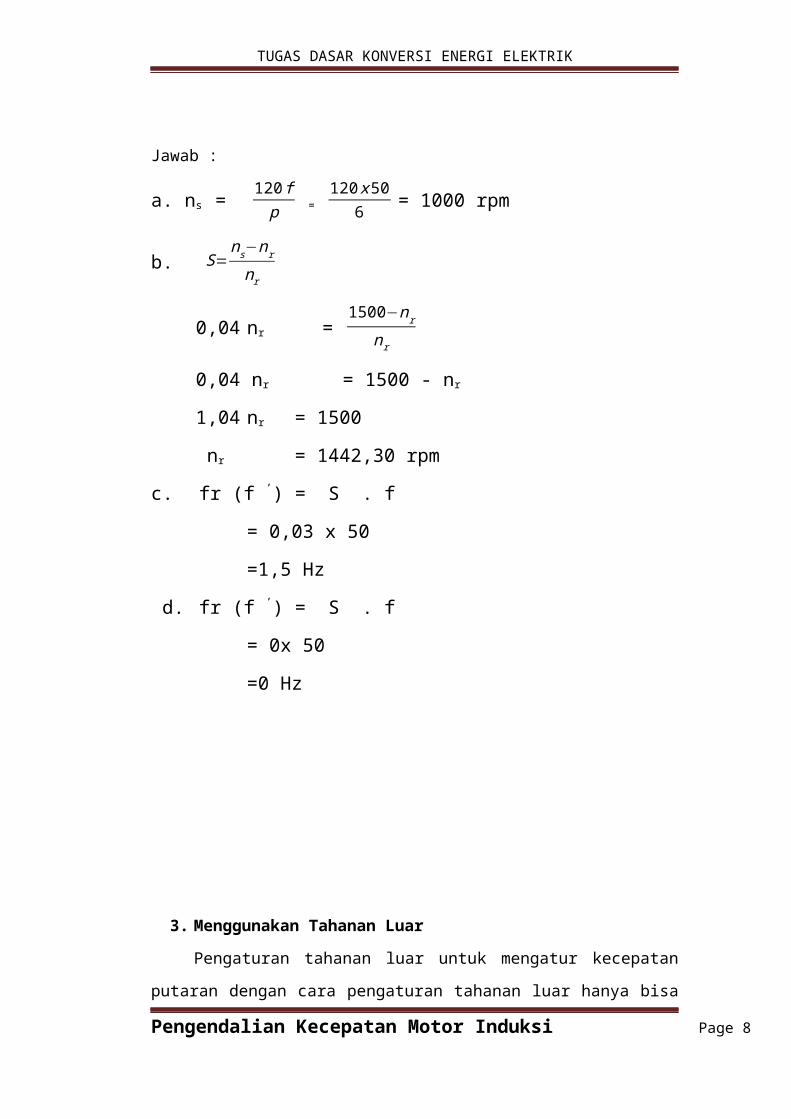
Jawab :
a. ns = 120fp =
120x506 = 1000 rpm
b. S=ns−nr
nr
0,04 nr = 1500−nr
nr
0,04 nr = 1500 - nr
1,04 nr = 1500
nr = 1442,30 rpm
c. fr (f ’) = S . f
= 0,03 x 50
=1,5 Hz
d. fr (f ’) = S . f
= 0x 50
=0 Hz
3. Menggunakan Tahanan Luar
Pengaturan tahanan luar untuk mengatur kecepatan
putaran dengan cara pengaturan tahanan luar hanya bisa
Pengendalian Kecepatan Motor Induksi Page 8
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
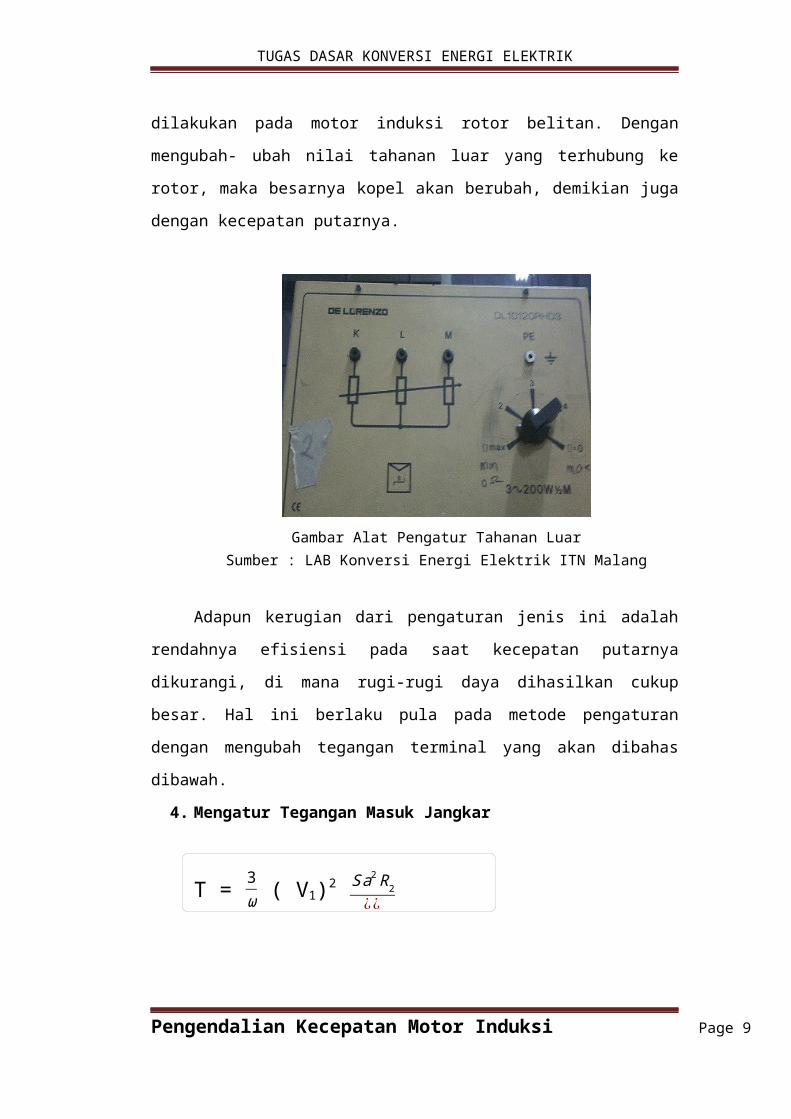
dilakukan pada motor induksi rotor belitan. Dengan
mengubah- ubah nilai tahanan luar yang terhubung ke
rotor, maka besarnya kopel akan berubah, demikian juga
dengan kecepatan putarnya.
Gambar Alat Pengatur Tahanan LuarSumber : LAB Konversi Energi Elektrik ITN Malang
Adapun kerugian dari pengaturan jenis ini adalah
rendahnya efisiensi pada saat kecepatan putarnya
dikurangi, di mana rugi-rugi daya dihasilkan cukup
besar. Hal ini berlaku pula pada metode pengaturan
dengan mengubah tegangan terminal yang akan dibahas
dibawah.
4. Mengatur Tegangan Masuk Jangkar
T = 3ω ( V1)2 Sa2R2
¿¿
Pengendalian Kecepatan Motor Induksi Page 9
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
Dari persamaan diatas terlihat bahwa kopel motor
induksi sebanding dengan pangkat dua tegangan yang
diberikan. Apabila tegangan jaringan diubah, sesuai
dengan karakteristiknya, maka kopelnya pun berubah,
begitu pula dengan kecepatan putarnya. Cara ini hanya
menghasilkan pengaturan putaran yang terbatas (daerah
pengaturan sempit).
5. Menggunakan Kontrol Vektor
Pengendalian motor induksi tiga phasa dengan
kontrol vektor adalah suatu cara yang digunakan untuk
memperbaiki unjuk kerja motor. Unjuk kerja yang buruk
menyebabkan penggunaan motor menjadi terbatas. Seperti
diketahui motor induksi relatif murah, kokoh dan mudah
perawatannya namun mempunyai masalah dalam pengaturan
kecepatannya . Metoda kontrol vektor dilakukan dengan
cara mengestimasi fluks rotor dan posisi rotor , untuk
mengendalikan fluks rotor dan kecepatan rotor digunakan
pengendali PI
Kontrol vektor dikenal sebagai kontrol
berorientasi medan, yang diterapkan pada motor induksi
sehingga menghasilkan unjuk kerja yang mendekati unjuk
kerja motor arus searah. Pada motor arus searah
pemisahan hubungan antara torsi dengan fluks dapat
dilakukan dengan menyusun model rangkaian penguat motor
, sedangkan pada motor induksi, torsi dan fluks hanya
dapat dipisahkan dengan membuat rangkaian tambahan
diluar sistem, yaitu melalui kontrol vektor
Pengendalian Kecepatan Motor Induksi Page 10
TUGAS DASAR KONVERSI ENERGI ELEKTRIK
Konsep dasar kontrol vektor, bertujuan memisahkan
komponen arus penghasil fluks dengan komponen arus
penghasil torsi.
Pengendalian Kecepatan Motor Induksi Page 11




















