
parametric study and higher mode response quantification
155
PARAMETRIC STUDY AND HIGHER MODE RESPONSE QUANTIFICATION OF STEEL SELF-CENTERING CONCENTRICALLY-BRACED FRAMES A Thesis Presented to The Graduate Faculty of The University of Akron In Partial Fulfillment of the Requirements for the Degree Master of Science M. R. Hasan December, 2012
-
Upload
khangminh22 -
Category
Documents
-
view
2 -
download
0
Transcript of parametric study and higher mode response quantification

PARAMETRIC STUDY AND HIGHER MODE RESPONSE QUANTIFICATION
OF STEEL SELF-CENTERING CONCENTRICALLY-BRACED FRAMES
A Thesis
Presented to
The Graduate Faculty of The University of Akron
In Partial Fulfillment
of the Requirements for the Degree
Master of Science
M. R. Hasan
December, 2012

ii
PARAMETRIC STUDY AND HIGHER MODE RESPONSE QUANTIFICATION
OF STEEL SELF-CENTERING CONCENTRICALLY-BRACED FRAMES
M. R. Hasan
Thesis Approved:
Accepted:
_____________________________ Advisor Dr. David Roke _____________________________ Committee Co-Chair Dr. Kallol Sett _____________________________ Committee Member Dr. Qindan Huang
_____________________________ Department Chair Dr. Wieslaw Binienda _____________________________ Dean of the College Dr. George K. Haritos _____________________________ Dean of the Graduate School Dr. George R. Newkome _____________________________ Date

iii
ABSTRACT
Conventional concentrically braced frame (CBF) systems have limited drift capacity
prior to structural damage, often leading to brace buckling under moderate earthquake
input, which results in residual drift. Self-centering CBF (SC-CBF) systems have been
developed to maintain the economy and stiffness of the conventional CBFs while
increasing the ductility and drift capacity. SC-CBF systems are designed such that the
columns uplift from the foundation at a specified level of lateral loading, initiating a
rocking (rigid body rotation) of the frame. Vertically aligned post tensioning bars resist
column uplift and provide a restoring force to return the structure to its initial state (i.e.,
self-centering the system). Friction elements are used at the lateral-load bearings (where
lateral load is transferred from the floor diaphragm to the SC-CBF) to dissipate energy
and reduce the peak structural response.
Previous research has identified that the frame geometry is a key design parameter
for SC-CBFs, as frame geometry relates directly to the energy dissipation capacity of the
system. This thesis therefore considered three prototype SC-CBFs with differing frame
geometries for carrying out a comparative study. The prototypes were designed using
previously developed performance based design criteria and modeled in OpenSees to
carry out nonlinear static and dynamic analyses. The design and analysis results were

iv
then thoroughly investigated to study the effect of changing frame geometry on the
behavior of SC-CBF systems.
The rocking response in SC systems introduces large higher mode effects in the
dynamic responses of structure, which, if not properly addressed during design, can result
in seismic demands significantly exceeding the design values and may ultimately lead to
a structural failure. To compare higher mode effects on different frames, proper
quantification of the modal responses by standard measures is therefore essential. This
thesis proposes three normalized quantification measures based on an intensity-based
approach, considering the intensity of the modal responses throughout the ground motion
duration rather than focusing only on the peak responses. The effectiveness of the three
proposed measures and the conventionally used peak-based measure is studied by
applying them on dynamic analysis results from several SC-CBFs. These measures are
then used to compare higher mode effects on frames with varying geometric and friction
properties.

v
ACKNOWLEDGEMENTS
The research presented in this thesis was conducted at the University of Akron,
Department of Civil Engineering, in Akron, Ohio. During the study, the chairmanship of
the department was held by Dr. Wieslaw K. Binienda.
The author would like to thank his research advisor and chair of his thesis
committee, Dr. David Roke, for his constant guidance, support, direction, and advice for
past couple of years. The author would also like to thank his committee member Dr.
Qindan Huang, who has also been co-supervising his research for past few months, for
her guidance, support, direction, and advice. The author also appreciates the time and
contributions of Dr. Kallol Sett, the co-chair of his thesis committee, for his time, advice,
and input.
The author would like to thank the following people for their contributions to his
research: the civil engineering department staff for their support, and fellow researchers,
particularly Brandon Jeffers and Felix Blebo, for their continuous support and guidance.
Most importantly, the author would like to extend his greatest thanks to his friends
and family who have offered help and motivation along the way. The author extends a
special thanks to his parents and his elder sister, who have been his most steady

vi
supporters, all throughout his academic life. The author would also like to thank her little
sister, brother-in-law, mother-in-law and father-in-law for their support and guidance.
Most of all, the author is extremely thankful for the help, support, patience, and love
of his wonderful wife Pushpita. This thesis is for her.

vii
TABLE OF CONTENTS
Page
LIST OF TABLES ............................................................................................................ xii
LIST OF FIGURES ......................................................................................................... xiv
CHAPTER
I. INTRODUCTION ........................................................................................................1
1.1 Overview ............................................................................................................1
1.2 Literature Review...............................................................................................2
1.2.1 Background of Self-Centering Systems ............................................3
1.2.2 SC-CBF Systems ...............................................................................4
1.2.3 Higher Mode Effects on SC Systems ................................................5
1.3 Research Objectives and Scope .........................................................................6
1.4 Organization of Thesis .......................................................................................9
II. FUNDAMENTALS OF SC-CBF BEHAVIOR AND DESIGN ................................11
2.1 Overview ..........................................................................................................11
2.2 System Configuration ......................................................................................12

viii
2.3 System Behavior under Lateral Loading .........................................................12
2.4 Limit States ......................................................................................................14
2.4.1 Column Decompression ..................................................................14
2.4.2 PT Bar Yielding ...............................................................................15
2.4.3 Member Yielding ............................................................................15
2.4.4 Member Failure ...............................................................................15
2.5 Performance Based Design (PBD) ...................................................................16
2.5.1 Performance Levels .........................................................................16
2.5.2 Hazard Levels ..................................................................................18
2.5.3 SC-CBF Performance Objectives ....................................................18
2.6 Design Theory and Procedure ..........................................................................19
2.6.1 Initial Design Phase .........................................................................20
2.6.1.1 Design Response Spectrum................................................20
2.6.1.2 Equivalent Lateral Force Procedure...................................21
2.6.1.3 Initial Member Selection ....................................................22
2.6.1.4 Initial PT Bar Area Selection .............................................23
2.6.1.5 Hysteretic Energy Dissipation Ratio βE .............................26
2.6.2 Structural Member Design Phase ....................................................27
2.6.2.1 Modal Truncation...............................................................27
2.6.2.2 Factored Design Demand ...................................................28
2.6.2.3 Capacity Check ..................................................................30
2.6.3 PT Bar Design Phase .......................................................................31

ix
2.6.3.1 Decompression Roof Drift .................................................31
2.6.3.2 Factored Roof Drift Design Demand .................................32
2.6.3.3 Roof Drift Check................................................................34
2.6.4 Design of the Adjacent Gravity Columns .......................................35
III. DESIGN AND ANALYSIS RESULTS .....................................................................48
3.1 Overview ..........................................................................................................48
3.2 Prototype Buildings .........................................................................................48
3.3 Design Results .................................................................................................50
3.4 Analytical Model .............................................................................................51
3.5 Nonlinear Static Analysis ................................................................................53
3.5.1 Monotonic Pushover Study .............................................................53
3.5.2 Cyclic Pushover Study ....................................................................55
3.6 Nonlinear Dynamic Analysis ...........................................................................55
3.6.1 Ground Motion Records ..................................................................56
3.6.2 Peak Dynamic Responses ................................................................56
3.6.3 Time History Responses ..................................................................59
3.7 Summary ..........................................................................................................62
IV. HIGHER MODE EFFECTS .......................................................................................95
4.1 Overview ..........................................................................................................95
4.2 Higher Mode Contributions in SC-CBF Design ..............................................96
4.3 Prototypes for Higher Mode Quantification Study ..........................................96
4.4 Modal Analysis ................................................................................................97

x
4.5 Modal Decomposition ......................................................................................98
4.5.1 Effective Pseudo Acceleration ........................................................99
4.5.2 Effective Peak Displacement .........................................................100
4.6 Modal Decomposition Results .......................................................................101
4.6.1 Peak Effective Pseudo-Acceleration Response .............................102
4.6.2 Modal Responses ...........................................................................102
4.7 Quantification of Higher Mode Responses ....................................................103
4.7.1 Modal Peak to Total Peak Ratio ....................................................103
4.7.2 Modal Contribution Ratio at Total Peak Response .......................104
4.7.3 Normalized Modal Absolute Area Intensity .................................105
4.7.4 Modified Normalized Modal Absolute Area Intensity ..................105
4.8 Comparison of Quantification Measures .......................................................106
4.9 Modal Response Quantification Results ........................................................108
4.9.1 Effect of Frame Geometry .............................................................108
4.9.2 Effect of Friction ...........................................................................109
4.10 Summary ......................................................................................................110
V. SUMMARY AND CONCLUSIONS .......................................................................123
5.1 Summary ........................................................................................................123
5.1.1 Motivation for Present Research ...................................................123
5.1.2 Research Objectives and Scope .....................................................124
5.2 Findings..........................................................................................................128
5.2.1 SC-CBF Design Results ................................................................128

xi
5.2.2 Nonlinear Static Analysis Results .................................................129
5.2.3 Nonlinear Dynamic Analysis Results ............................................129
5.2.4 Higher Mode Quantification Results .............................................130
5.3 Conclusions ....................................................................................................131
5.4 Original Contributions of Research ...............................................................133
5.5 Future Work ...................................................................................................136
REFERENCES .........................................................................................................138

xii
LIST OF TABLES
Table Page
2.1 Summary of Performance Based Design Objectives ............................................ 37
2.2 Regression coefficients a, b, c, and d for Equations 2.50 and 2.51 (Seo 2005) ... 37
3.1 Design dead loads at each floor level ................................................................... 64
3.2 Design live loads at each floor level ..................................................................... 64
3.3 Summary of gravity loads on each adjacent-gravity column ................................ 64
3.4 Summary of gravity loads on the lean-on columns .............................................. 65
3.5 Summary of gravity column sections and lean-on column areas ......................... 65
3.6 Comparison of design parameters ......................................................................... 65
3.7 Summary of DBE-level ground motion characteristics ........................................ 66
3.8 Summary of gap opening and base shear responses to DBE-level ground motions for frame a ............................................................................................................. 67
3.9 Summary of gap opening and base shear responses to DBE-level ground motions for frame b ............................................................................................................. 68
3.10 Summary of gap opening and base shear responses to DBE-level ground motions for frame c ............................................................................................................. 69
3.11 Mean and standard deviation of gap opening and base shear responses to DBE-level ground motions............................................................................................. 70
3.12 Summary of drift responses to DBE-level ground motions for frame a ............... 71
3.13 Summary of drift responses to DBE-level ground motions for frame b ............... 72
3.14 Summary of drift responses to DBE-level ground motions for frame c ............... 73

xiii
3.15 Mean and standard deviation of drift responses to DBE-level ground motions ... 74
3.16 Summary of peak brace force and PT bar force responses to DBE-level ground motions for frame a ............................................................................................... 75
3.17 Summary of peak brace force and PT bar force responses to DBE-level ground motions for frame b ............................................................................................... 76
3.18 Summary of peak brace force and PT bar force responses to DBE-level ground motions for frame c ............................................................................................... 77
3.19 Brace axial force capacity (kips) ........................................................................... 78
3.20 Mean and standard deviation of peak brace force and PT bar force responses to DBE-level ground motions ................................................................................... 78
4.1 Modal properties of prototypes with varying frame geometries ......................... 111
4.2 Modal properties of prototypes with varying coefficients of friction ................. 111
4.3 Quantification data of modal base shear responses for prototypes with varying frame geometries ................................................................................................. 112
4.4 Quantification data of modal base shear responses for prototypes with varying coefficients of friction ......................................................................................... 112

xiv
LIST OF FIGURES
Figure Page
2.1 Schematic configuration of an SC-CBF system ................................................... 38
2.2 SC-CBF behavior under lateral loading: (a) elastic deformation under low level of forces; (b) column uplifting under high level of forces ........................................ 39
2.3 Typical force distribution at column decompression (Jeffers 2012) .................... 40
2.4 Typical force distribution at PT bar yielding (Jeffers 2012) ................................. 41
2.5 Idealized base shear-roof drift response of an SC-CBF........................................ 42
2.6 Schematic of performance based design criteria .................................................. 43
2.7 Design response spectrum (ASCE 2010) .............................................................. 44
2.8 Hysteretic response of an SC-CBF system with friction-based energy dissipation compared to that of a bilinear elasto-plastic system. (Jeffers 2012) ..................... 45
2.9 Schematic of idealized overturning moment versus roof drift response of an SC-CBF system (Roke 2010) ...................................................................................... 46
2.10 Design cases for the adjacent gravity column: (a) PT bar yielding; (b) unloading after PT bar yielding (Jeffers 2012) ...................................................................... 47
3.1 Prototype buildings used for the parametric study: (a) typical elevation; (b) floor plan for frame a; (c) floor plan for frame b; (d) floor plan for frame c ................ 79
3.2 Member selections for the frame a ........................................................................ 80
3.3 Member selection for the frame b ......................................................................... 81
3.4 Member selections for the frame c ........................................................................ 82
3.5 Monotonic pushover results: (a) pre-decompression response; (b) full range of response................................................................................................................. 83

xv
3.6 Cyclic pushover results: up to 1% roof drift ......................................................... 84
3.7 DBE-level peak roof drift response for all three frames ....................................... 85
3.8 Roof drift response to arl360 ground motion for frame a ..................................... 86
3.9 Roof drift response to arl360 ground motion for frame b ..................................... 86
3.10 Roof drift response to arl360 ground motion for frame c ..................................... 87
3.11 PT bar force response to arl360 ground motion for frame a ................................. 87
3.12 PT bar force response to arl360 ground motion for frame b ................................. 88
3.13 PT bar force response to arl360 ground motion for frame c ................................. 88
3.14 PT bar force and SC-CBF column base gap opening response to arl360 ground motion for frame a ................................................................................................ 89
3.15 PT bar force and SC-CBF column base gap opening response to arl360 ground motion for frame b ................................................................................................ 89
3.16 PT bar force and SC-CBF column base gap opening response to arl360 ground motion for frame c ................................................................................................ 90
3.17 First story brace axial force response to arl360 ground motion for frame a ......... 90
3.18 First story brace axial force response to arl360 ground motion for frame b ......... 91
3.19 First story brace axial force response to arl360 ground motion for frame c ......... 91
3.20 Overturning moment roof drift response to arl360 ground motion for frame a .... 92
3.21 Overturning moment roof drift response to arl360 ground motion for frame b ... 92
3.22 Overturning moment roof drift response to arl360 ground motion for frame c .... 93
3.23 Overturning moment column base gap opening response to arl360 ground motion for frame a ............................................................................................................. 93
3.24 Overturning moment column base gap opening response to arl360 ground motion for frame b ............................................................................................................. 94
3.25 Overturning moment column base gap opening response to arl360 ground motion for frame c ............................................................................................................. 94

xvi
4.1 Normalized displaced shapes of frames a45, b45, and c45 for- (a) 1st mode and rocking displaced shape; (b) 2nd mode; and (c) 3rd mode ................................... 113
4.2 Normalized displaced shapes of frames b30, b45, and b60 for- (a) 1st mode and rocking displaced shape; (b) 2nd mode; and (c) 3rd mode ................................... 113
4.3 Distribution of modal effective pseudo-acceleration responses for frame b45 .. 114
4.4 Base shear response of frame b45 to arl360: total response vs.- (a) 1st mode response; (b) 2nd mode response; and (c) 3rd mode response .............................. 115
4.5 Overturning moment response of frame b45 to arl360: total response vs.- (a) 1st mode response; (b) 2nd mode response; and (c) 3rd mode response .................... 116
4.6 Roof drift response of frame b45 to arl360: total response vs.- (a) 1st mode response; (b) 2nd mode response; and (c) 3rd mode response .............................. 117
4.7 Schematics of total and modal time history responses ....................................... 118
4.8 Normalized modal absolute area intensities for base shear responses of frames a45, b45, and c45 ................................................................................................ 119
4.9 Mean normalized modal absolute area intensities for story shear responses of frames a45, b45, and c45 .................................................................................... 119
4.10 Normalized modal absolute area intensities for roof drift responses of frames a45, b45, and c45 ........................................................................................................ 120
4.11 Mean normalized modal absolute area intensities for story drift responses of frames a45, b45, and c45 .................................................................................... 120
4.12 Normalized modal absolute area intensities for base shear responses of frames b30, b45, and b60 ................................................................................................ 121
4.13 Mean normalized modal absolute area intensities for story shear responses of frames b30, b45, and b60 .................................................................................... 121
4.14 Normalized modal absolute area intensities for roof drift responses of frames b30, b45, and b60 ........................................................................................................ 122
4.15 Mean normalized modal absolute area intensities for story drift responses of frames b30, b45, and b60 .................................................................................... 122

1
CHAPTER I
INTRODUCTION
1.1 Overview
Recent advances in earthquake engineering research have shifted the seismic design
philosophy from strength based design to performance based design. To improve
performance over conventional design, researchers have studied self-centering or base-
rocking structural systems, which have a significant advantage over their conventional
fixed-base counterparts as efficient earthquake resistant systems because of their high
lateral load bearing capacity without any residual drift or structural damage.
The steel self-centering concentrically braced frame (SC-CBF) system is one such
structural system. SC-CBFs have been developed to maintain the economy and stiffness
of conventional concentrically braced frames (CBFs), while increasing the ductility and
drift capacity of the system (Roke et al. 2006). SC-CBF systems are designed such that
the columns uplift from the foundation at a specified level of lateral loading, initiating a
rocking (or rigid body rotation) of the frame. Vertically aligned post tensioning (PT) bars
resist column uplift and provide a restoring force to return the structure to its initial state
(i.e., self-centering the system). Friction elements at the lateral-load bearings (where

2
lateral load is transferred from the floor diaphragm to the SC-CBF) dissipate energy
during cyclic loading (Roke et al. 2010).
Previous research has identified that the energy dissipation capacities of SC-CBF
systems are functions of the coefficient of friction at the lateral-load bearings and the
frame geometry (Roke et al. 2010). In this thesis, prototype SC-CBF structures with
different frame geometries have been designed and analyzed to study the effect of frame
geometry on the overall seismic performance of the system.
Previous research has also identified that the introduction of rocking response in self-
centering structural systems causes higher mode responses to significantly exceed that of
an equivalent fixed-base structure (Roke et al. 2009, Wiebe and Christopoulos 2009). The
presence of higher modes introduces significant uncertainty in the dynamic responses of
structures, which, if not properly addressed during design, can result in seismic responses
significantly exceeding the design demands. To compare higher mode effects on different
frames and determine an optimal SC-CBF configuration, proper quantification of the
higher mode responses for such systems is essential. This thesis proposes several
quantification measures that can be used to study higher mode responses in SC-CBF
systems. The quantification measures are used to compare higher mode contributions for
frames with varying geometric and friction properties.
1.2 Literature Review
This section discusses some of the previous researches on self-centering (SC)
systems. A brief summary of the development of such structural systems has been

3
presented. A brief background on the SC-CBF systems and higher mode effects
quantification research has also been presented.
1.2.1 Background of Self-Centering Systems
Self-centering (SC) systems are recent advancements in earthquake resistant
structural systems. The difference between conventional and SC structural systems is that
critical connections in SC systems are designed to decompress at a specific level of
lateral loading. After decompression, a gap opens between the elements at those
connections, softening the force-deformation response without structural damage. PT
elements are used to provide a restoring force to return the connection to its closed state
after an earthquake (i.e., self-centering the system). Energy dissipation (ED) elements
that are deformed by the gap opening behavior are often included in the system; the ED
elements can typically be replaced following an earthquake.
SC systems were first developed for precast concrete buildings (Priestley et al. 1999,
Kurama et al. 1999). There have been many experimental and analytical studies of SC
systems for concrete, ultimately leading to the design requirements for such systems to be
included in New Zealand building codes (NZS 2006).
The concept of self-centering has also been extended to steel structural systems, and
several innovative solutions have been developed in recent years based on this concept.
SC concepts have been applied to steel structures in the shape of self-centering moment
resisting frame (SC-MRF) or post-tensioned MRF (PT-MRF) systems (e.g., Ricles et al.
2001). SC concepts were then extended to CBFs in the development of SC-CBFs (Roke
4
et al. 2006). Self-centering energy dissipative (SCED) steel brace members have also
been developed (e.g., Christopoulos et al 2008). SCED braces are intended to sustain
large axial deformations without damaging the brace member and to provide stable
energy dissipation without residual drift.
1.2.2 SC-CBF Systems
SC-CBFs with friction based energy dissipation have been developed at Lehigh
University to improve the seismic performance of already popular steel CBF systems.
SC-CBFs were developed to maintain the economy and stiffness of the conventional CBF
systems, while increasing the lateral drift capacity before structural damage initiates and
reducing the potential for residual drift (Roke et al. 2006). Analytical and experimental
studies have been carried out, and a performance based design procedure was developed
for SC-CBF systems. Several frame configurations have been studied with different
arrangements of PT bars and ED elements. Roke et al. (2010) identified energy
dissipation capacity, which is a function of the geometric and friction properties of the
SC-CBF, as a primary parameter for SC-CBF structural systems (Roke et. al 2010).
The study presented in this thesis is an extension of the research carried out by Roke
et al. (2010), who considered only a fixed set of geometric and friction properties of SC-
CBF prototypes. To extend that study, SC-CBFs were designed with different energy
dissipation capacities by varying the frame geometries and friction coefficients at lateral
load bearings to study the effect of these changing properties on the overall seismic
behavior of the system. Jeffers (2012) conducted studies on SC-CBF prototypes with

5
different friction coefficients. The research presented in this thesis involves prototypes
with different frame geometries, which complements the research carried out by Roke et
al. (2010) and Jeffers (2012).
1.2.3 Higher Mode Effects on SC Systems
Higher mode effects may contribute significantly to structural responses, and
therefore must be considered in the calculation of design demands, especially for SC
structural systems. For conventional fixed based structural systems, higher mode effects
are only significant for high rise buildings. However, for self-centering or base-rocking
structural systems, the effects are comparatively much more significant, even for low rise
buildings (e.g., Kurama et al. 1999, Roke et al. 2009, Wiebe and Christopoulos 2009).
For concrete precast wall systems, Kurama et al. (1999) found that the first mode
response alone was inadequate to predict the peak base shear demands from dynamic
analyses. This effect is due to the softening of the lateral force-lateral drift response of the
system, which resulted in period elongation that increased the contribution of the higher
modes to the inertia forces. Aoyama (1987) and Kabeyasawa (1987) incorporated the
higher modes into an estimate of the base shear design demand for concrete structures;
Kurama et al. (1999) demonstrated that this method can also be applied to rocking
concrete wall systems.
Roke et al. (2009) also found that SC-CBF systems are subjected to amplified higher
mode effects due to rocking response, introducing the concept of effective pseudo
acceleration to develop an approximate modal decomposition method for nonlinear

6
response of SC-CBF systems. This modal decomposition method was applied to generate
first mode overturning moment and base shear responses. The study suggested that
overturning moment is primarily a first mode dominated response while base shear
responses had significant contributions from higher modes. For SC-CBF systems, Wiebe
and Christopoulos (2009) proposed the introduction of multiple rocking sections over the
height of the rocking wall system to reduce higher mode effects.
1.3 Research Objectives and Scope
The research presented in this thesis has two primary objectives. The first objective
is to determine how frame geometry affects the seismic performance of the SC-CBF
systems, with the goal of finding an optimal and economic SC-CBF configuration that
maximizes the energy dissipation capacity. The second objective is to study the modal
behavior of SC-CBF systems by determining higher mode effects on the frames with
differing friction and geometric properties.
The research objectives are used to define the tasks within the scope of this thesis.
The specific tasks necessary to achieve the research objectives are the following:
1. Design prototype SC-CBF prototypes with three different frame bay widths
using previously developed performance-based design criteria. Four-story
prototype SC-CBFs, with three different braced bay widths, were designed
using the same floor plan area, friction properties and loading conditions. The
designs of the SC-CBFs followed the PBD procedure developed by Roke et
7
al. (2010). The design results were compared to determine the effects of frame
geometry on various design parameters.
2. Develop analytical models for SC-CBF prototypes. Nonlinear analytical
models were created in OpenSees (Mazzoni et al. 2009) to analyze the
designed SC-CBF systems. For each prototype structure, a single SC-CBF is
modeled and analyzed instead of the entire structure for the sake of simplicity.
The main components of the model are the SC-CBF, the adjacent gravity
columns, and the lean-on column, which accounts for the mass of the structure
and the P-Δ effects on the SC-CBF system.
3. Perform nonlinear static analyses using OpenSees models. Nonlinear static
analyses were performed in OpenSees for the prototype SC-CBFs to
determine the system behavior under static monotonic and cyclic pushovers.
The analysis results were compared to determine the effects of frame
geometry on the SC-CBF behavior under static loading.
4. Perform nonlinear dynamic analyses using a suite of DBE-level ground
motions. Nonlinear dynamic time history analyses of each prototype SC-CBF
were performed in OpenSees using a suite of 30 ground motion records scaled
to DBE-level. The dynamic analysis results were compared to determine the
effects of frame geometry on the seismic response of SC-CBF systems.
5. Perform modal analysis to determine the modal properties of the prototypes.
Eigen value analyses of the prototypes were performed in OpenSees to

8
determine the modal properties of the prototypes. The prototypes considered
for the study of higher mode effects include the three prototype SC-CBFs with
varying frame geometry and two prototype SC-CBFs designed and analyzed
by Jeffers (2012) with varying friction coefficients. The modal properties of
the five prototype SC-CBFs were compared to study the effect on friction and
frame geometry on the modal behavior of SC-CBF systems.
6. Perform modal decomposition of dynamic time history results. For each
prototype SC-CBF, dynamic analysis results of several response quantities
(e.g., base shear, roof drift, and overturning moment) were decomposed into
modal responses. These calculated modal responses were compared against
the total response to observe the relative higher mode effects on different
response quantities for the different prototype SC-CBFs.
7. Develop quantification measures for quantifying and comparing higher mode
contributions to total response. Several quantification measures were
developed, considering conventional peak-based approaches as well as
proposed intensity-based approaches. The effectiveness of these measures was
studied to find the most appropriate measure for quantification of higher mode
effects on SC-CBF systems. This quantification measure is then applied to
dynamic responses to compare and study the effect of frame geometry and
friction on the higher mode response of SC-CBF systems.

9
8. Assess the overall behavior and performance of all SC-CBF prototypes. The
design and analysis results for the SC-CBF prototypes with differing frame
bay widths were compared and studied. The higher mode effects on all five
prototype SC-CBFs are then assessed. Based on these results,
recommendations have been made for an optimal SC-CBF configuration.
1.4 Organization of Thesis
The remaining chapters of this thesis are organized as follows:
• Chapter 2 presents all the fundamentals of SC-CBF systems with friction based
energy based dissipation, including an explanation of SC-CBF behavior under
lateral loading, the PBD criteria, and a detailed description of the SC-CBF design
procedure.
• Chapter 3 describes the design and analysis results for the SC-CBF prototypes
with varying frame geometries. A detailed description of the analytical models
and the analysis results also presented in this chapter. The analysis results include
the nonlinear static pushover responses as well as the nonlinear dynamic time
history responses to a suite of 30 DBE-level ground motions.
• Chapter 4 presents the additional prototype SC-CBFs for the study of modal
response. The mathematical basis for modal decomposition of time history
responses is presented. This chapter also introduces a number of quantification
measures. These measures are compared against each other to determine the most
effective quantification measure for SC-CBF systems, which is then used to

10
compare higher mode effects on frames with varying geometric and friction
properties.
• Chapter 5 summarizes the research program and offers conclusions and
recommendations for future research.

11
CHAPTER II
FUNDAMENTALS OF SC-CBF BEHAVIOR AND DESIGN
2.1 Overview
The conventional concentrically-braced frame (CBF) has been a popular earthquake-
resistant structural system due to its economy and stiffness. However, conventional CBF
systems have limited drift capacity prior to structural damage, often leading to residual
drift under moderate earthquake input. Steel self-centering CBFs (SC-CBFs) with
friction-based energy dissipation have been developed to increase the lateral drift
capacity of CBFs while also reducing the residual drift. Previous research has developed
a performance based design (PBD) framework for such systems and a number of SC-
CBF configurations have been studied (Roke et al. 2010). This chapter discusses the
fundamentals of SC-CBF behavior under lateral loading (including the various limit
states associated with the system), provides a brief presentation of the PBD framework,
and presents the complete PBD procedure and the underlying theories for SC-CBF
design.

12
2.2 System Configuration
A simple SC-CBF configuration is shown schematically in Figure2.1. The frame
geometry is similar to that of a conventional CBF; the SC-CBF consists of structural
members (e.g., beams, columns, and braces) in a conventional arrangement. The
significant difference between SC-CBFs and conventional CBFs is that column base
details for the SC-CBF permit column uplift under a specified level of lateral loading.
Vertically aligned post-tensioning (PT) bars are used to provide the restoring force for the
structure to return to its original position after column uplift. SC-CBF columns do not
carry the structural weight (gravity load); instead, two gravity load bearing columns (the
adjacent gravity columns shown in Figure 2.1) are included with the SC-CBF in a single
bay. The adjacent gravity columns do not uplift. The floor system is supported by these
gravity columns; the floor system is not directly connected to SC-CBF columns, avoiding
the need to detail floor-to-column connections that accommodate the uplift of the SC-
CBF. Lateral load bearings at the floor levels transmit the lateral inertia forces into the
SC-CBF. These lateral load bearings develop friction forces in the vertical direction
which aids in energy dissipation after earthquakes.
2.3 System Behavior under Lateral Loading
Under low levels of lateral load, the SC-CBF undergoes elastic deformation similar
to that of a conventional CBF, as shown in Figure 2.2(a). As the lateral loading is
increased, the SC-CBF columns begin to decompress and uplift from the base, as shown
in Figure 2.2(b). The column uplift induces rigid body rotation (or “rocking”) about the

13
base of the column that is still in contact with the foundation. This rocking response
results in a significantly increased lateral drift capacity of the structure prior to structural
damage by limiting the member deformation demands. Friction forces are developed at
the lateral load bearings in vertically downward direction to oppose the lateral
deformation. The magnitudes of the friction force are equal to the lateral force acting on
the frame (Fi) times the coefficient of friction (μ) at the lateral load bearings. These
friction forces along with the weight of the frame and the force in the PT bars provide the
restoring force for the SC-CBF to return to its undeformed state (i.e., self-centering the
system) after rocking.
The point at which the overturning moment due to the applied lateral loads exceeds
the overturning moment resistance of the frame is called “column decompression,” as the
initial compression in the SC-CBF column is negated by the tension demand from the
base overturning moment. Figure 2.3 shows a typical free body diagram of an SC-CBF at
column decompression subjected to applied loads FD,i at floor i. By definition, the
vertical reaction at the base of the uplifting column is equal to zero. At this point, the PT
force is equal to its initial value (PT0). The friction forces FED,D,i at the lateral load
bearings at each floor i act along the centerline of the adjacent gravity column (Roke et
al. 2010). The weight of the SC-CBF, WSC-CBF, is assumed to act at midbay.
After column decompression, the PT bars elongate as a gap opens between the
uplifting column base and the foundation and develop an increased tensile force. As the
lateral forces continue to increase beyond column decompression, the PT bars will
eventually yield. Figure 2.4 shows a typical free body diagram of an SC-CBF at PT bar

14
yielding. As with the column decompression state shown in Figure 2.3, at PT bar yielding
the vertical reaction at the uplifted column base is zero. At PT bar yielding, the PT force
will be equal to the yield force (PTY). FED,Y,i is assumed to act along the centerline of the
adjacent gravity columns, and WSC-CBF is assumed to act at midbay.
Further increases in lateral loading beyond PT bar yielding will eventually result in
member yielding and finally member failure, which may lead to structural collapse.
2.4 Limit States
There are four limit states associated with the SC-CBF behavior under lateral
loading: 1) column decompression; 2) PT bar yielding; 3) member yielding (e.g., beams,
columns, braces or strut); and 4) member failure. These limit states, and when they are
expected to occur in a pushover analysis, are shown schematically in Figure 2.5.
2.4.1 Column Decompression
Column decompression is the most significant feature of self-centering structural
systems. Column decompression occurs when the tensile force demand due to the base
overturning moment exceeds the initial compressive force in one of the SC-CBF
columns. Column decompression creates a gap at the base of the column and induces
rocking response of the SC-CBF.
Special detailing at the SC-CBF column bases is necessary to permit this column
decompression and the associated rocking to occur without structural damage. As the SC-
CBF rocks, the vertically-oriented PT bars elongate, providing a restoring force that tends

15
to self-center the SC-CBF (i.e., return it to its initial position) after column
decompression and rocking occur.
2.4.2PT Bar Yielding
After column decompression the PT bars elongate, increasing the stress in the bars
beyond the initial stress. As the stress in PT bars reaches the yield value, the PT bars
yield, which is the first occurrence of structural damage. PT bar yielding softens the
lateral force-lateral drift response of the system, as shown in Figure 2.5. After an
earthquake during which the PT bars have yielded, SC-CBFs lose some of their self-
centering capacity, which requires repair; the initial stress in the PT bars can be easily
restored by repeating the post-tensioning operation on the PT bars.
2.4.3 Member Yielding
The introduction of rocking behavior in the SC-CBFs tends to reduce the
deformation demands in the frame members (beams, columns, braces, and strut), as the
deformations are localized into the gap opening response. As the lateral forces increase
beyond PT bar yielding, the members will eventually yield. Member yielding is a form of
structural damage that results in permanent member deformation and residual drift.
2.4.4 Member Failure
Even after the members yield, the structure should not collapse. If the structure is
properly designed and detailed, a certain amount of post-yielding ductility capacity will
be available between member yielding and member failure. Member failure is defined as

16
the loss of force capacity due to excessive deformation (such as member yielding or
buckling). Member failure leads to collapse of the system.
2.5 Performance Based Design (PBD)
Recent advances in earthquake engineering have seen the design philosophy and
focus has shifted from strength based design to performance based design (PBD). In
PBD, the structures are designed to meet certain performance criteria under certain
seismic hazard conditions. Several standardized performance and hazard levels were
developed as guidelines (BSSC 2003) for the design which will be discussed below.
Based on to those performance and hazard levels, some performance objectives for SC-
CBF systems have been set (Roke et al. 2010). The frames are designed such that they
fulfill all the objectives.
2.5.1 Performance Levels
Several performance levels are identified and described in FEMA 450 (BSSC 2003)
for the performance based seismic design of structures. The performance levels are
Operational (O), Immediate Occupancy (IO), Life Safety (LS), and Collapse Prevention
(CP). The hazard levels are defined as Maximum Considered Earthquake (MCE), Design
Based Earthquake (DBE), and Frequently Occurring Earthquake (FOE).
At the O performance level, the structure may undergo negligible structural damage
and minor non-structural damage during an earthquake. No repair is generally required,
and the risk to life safety is almost zero. Column decompression is the only limit state
that is permissible at the O performance level.

17
The IO performance level is similar to the O performance level, except that more
non-structural damage is permitted in the IO performance level. Although the structure
will retain most of its pre-earthquake strength, significant non-structural repair may be
required before normal function of the structure is restored. Column decompression and
minor PT bar yielding are permitted at the IO performance level.
At the LS performance level, the structure will sustain significant structural and non-
structural damage during an earthquake, resulting in a reduction of the original strength
and stiffness. Residual drift, member yielding, and some severe local damage to members
are likely to occur. However, the structure will still have a significant safety margin
against collapse. Repair of the structure at this stage is expected to be feasible, but may
not be an economically viable option. The limit states that are permitted within LS
performance are column decompression, PT bar yielding, and member yielding.
At the CP performance level, the structure will sustain nearly complete damage
during an earthquake. The structure is expected to lose nearly all of its pre-earthquake
stiffness and margin of safety against collapse will be small. Due to the substantial
damage to both structural and non-structural systems, repair of the structure may not be
practically achievable. Column decompression, PT bar yielding, and member yielding are
permitted to occur within this performance level.

18
2.5.2 Hazard Levels
Several hazard levels (earthquake intensities) are identified and described in FEMA
450 (BSSC 2003). The hazard levels are defined as Maximum Considered Earthquake
(MCE), Design Based Earthquake (DBE), and Frequently Occurring Earthquake (FOE).
The MCE hazard level is defined as a ground motion intensity that has a 2%
probability of exceedance in 50 years, corresponding to a 2500-year return period. This
intensity level is intended to be “reasonably representative of the most severe ground
motion ever likely to affect a site” (BSSC 2003).
The DBE hazard level represents a ground motion intensity that is two-thirds of that
of the MCE. The DBE corresponds approximately to a ground motion intensity that has a
return period of several hundred years.
The FOE hazard level, which is also known Maximum Probable Event (MPE), refers
to a ground motion intensity that has a 50% probability of exceedance in 50 years,
corresponding to a 72-year return period.
2.5.3 SC-CBF Performance Objectives
The performance objectives for the SC-CBF system are to achieve IO performance
under DBE-level ground motions and CP performance under MCE-level ground motions.
The performance objectives for conventional seismic-resistant structural systems are to
achieve LS performance under DBE-level ground motions and CP performance under
MCE-level ground motions (BSSC 2003). Therefore, the proposed performance of the
19
SC-CBF system is better than that of conventional systems. Table 2.1 summarizes the
performance objectives in terms of the performance levels, the hazard levels, and the
associated limit states. Figure 2.6 shows the performance based design criteria
schematically in an idealized base shear-roof drift response curve, similar to that shown
in Figure 2.5.
2.6 Design Theory and Procedure
Roke et al. (2010) developed a PBD procedure based on the performance objectives
described in the Section 2.5. The purpose of the SC-CBF design is to determine the
member sizes (e.g., beam, column, brace, and strut sizes), the required PT steel area, and
the initial stress in the PT bars. The design procedure consists of three phases: the
preliminary or initial design phase, the structural member design phase and the PT bar
design phase.
The initial design phase includes constructing a design response spectrum and
executing the equivalent lateral force (ELF) procedure as described in ASCE-7 (ASCE
2010). This phase also includes the selection of the initial arbitrary member sizes and the
determination of initial PT steel area.
The structural members are designed to meet “strength” criteria, and the PT bars are
designed to meet “serviceability” (or drift) criteria. Member force design demands in the
structural members are dictated by applied lateral loads and the PT yield force. The drift
demand for PT steel (and ultimately the total PT bar area and PT yield force) is dictated
by the lateral stiffness of the SC-CBF, which is dependent on the member sizes. Due to

20
this interdependence of member design and PT steel design, an iterative design procedure
has been adopted.
During the structural member design phase, modal lateral forces are applied to the
SC-CBF to determine the modal member force demands. These modal member forces
demands are combined to determine the factored member force design demands for each
member, which are then checked against the member capacity. The member capacities
are determined from bending moment and axial force interaction equations (AISC
2005b).
During the PT bar design phase, a drift check is carried out to determine the required
area of PT steel. The PT bars must be selected such that the factored DBE roof drift
demand is less than or equal to the roof drift capacity of the SC-CBF at PT bar yielding.
The structural member and PT bar design phases may be repeated for several
iterations until a satisfactory design is achieved. Once the final frame members and PT
bar area have been selected, the adjacent gravity columns must be designed. The entire
design procedure is explained in details in following sections.
2.6.1 Initial Design Phase
2.6.1.1 Design Response Spectrum
The first step in the initial design phase is to construct a design response spectrum as
described in ASCE-7 (ASCE 2010). Atypical DBE-level design response spectrum is
shown in Figure 2.7. The design response spectrum is defined as:

21
<⋅
≤<
≤<
≤
⋅+
=
TTT
TS
TTTT
S
TTTS
TTTT..S
)T(SA
LLD
LSD
SDS
DS
21
1
0
00
6040
(2.1)
where,
SDS, SD1 = spectral response acceleration parameters for short periods and a period
of 1 sec., respectively
T0, TS, and TL = transition periods (see ASCE 2010)
2.6.1.2 Equivalent Lateral Force Procedure
The equivalent lateral force (ELF) procedure described in ASCE-7 (2010) is used to
determine the initial yield strength of the SC-CBF system. The ELF procedure, as applied
to SC-CBF systems, is summarized by Jeffers (2012).
The lateral force vector determined using the ELF procedure represents the total
lateral force acting on the building. This vector must therefore be divided by the number
of SC-CBFs in each direction to get ELF force vector acting on each SC-CBF. For
example, the prototype structures that are being used in this study contain four SC-CBFs
in each direction; therefore, each SC-CBF will be designed to carry one quarter of the
total lateral force.
22
Once the ELF force vector for one SC-CBF, FELF, is determined, the ELF
overturning moment is determined using the following equation:
{ } { }ELFT
ELF FhOM = (2.9)
where, {h} = vector of heights from the base of the SC-CBF to each floor level.
2.6.1.3 Initial Member Selection
Once the design response spectrum is established and ELF procedure is applied, the
first step in the design process will be to choose section sizes for each of the structural
members (e.g. beams and columns). This selection may be arbitrary for the first iteration
of design. Modal analysis of the frame is then carried out using standard linear elastic
structural analysis software (e.g., SAP2000). The SC-CBF mode shapes are then used to
calculate modal spatial distribution of masses and lateral forces.
The modal spatial distribution of masses for mode i, {si}, is calculated as:
{ } [ ]{ }iii ms φΓ ⋅= (2.10)
where,
[m] = seismic mass matrix
{φi} = mode shape vector for mode i
{ } [ ]{ }i
Ti
i Mimφ
Γ = (2.11)
23
{i} = {1 1 1 1}T for a four-story SC-CBF
{ } [ ]{ }iT
ii mM φφ= (2.12)
2.6.1.4 Initial PT Bar Area Selection
For the selection of initial PT steel area, the initial overturning moment at
decompression (OMD,initial) and initial overturning moment at PT bar yield (OMY,initial)
must be calculated from OMELF based on assumed values of the parameters αD andαY:
ELFinitDinitialD OMOM ⋅= ,, α (2.13)
ELFinitYinitialY OMOM ⋅= ,, α (2.14)
For the first iteration,αD,init and αY,init have been set to 0.8 and 1.2 respectively (Roke at
al. 2010). Once OMD,initial and OMY,initial are calculated, the initial area of PT steel can be
selected. Figures 2.3 and 2.4 show free body diagrams of an SC-CBF system at column
decompression and at PT bar yielding, respectively. In these figures, s is the distance
between the centerlines of the SC-CBF column and the adjacent gravity column, FCon is
the vertical reaction force at the base of the compression column, and Vb is the base shear.
The overturning moment (OM) resistances at column decompression (OMD) and at PT
bar yielding (OMY) can be calculated by the following equations:
( ) DEDCBFSC
CBFSCD OMb
WPTOM ,0 2+⋅+= −
− (2.15)

24
( ) YEDCBFSC
CBFSCYY OMb
WPTOM ,2+⋅+= −
− (2.16)
where OMED,D and OMED,Y represent the overturning moment resisted due to energy
dissipation (in this case, friction at the lateral-load bearings) at column decompression
and PT bar yielding, respectively. OMED can be calculated from the applied lateral forces
as follows:
OMbh
OMbFbFOM EDEDi
iEDi
iEDED ⋅=⋅⋅=⋅⋅=⋅= ∑∑==
ηµµ *1
4
1
4
1, (2.17)
Here, η is a design parameter that quantifies the energy dissipation capacity of the SC-
CBF system. The value of η needs to be smaller than 0.50; otherwise the system will not
be able to self-center (Roke et al. 2010). The parameter can be expressed as:
*1h
bED⋅= µη (2.18)
where,
bED= the distance between the point of contact of the compression column and the
centerline of the gravity column along which FED acts, as shown in Figures
2.3 and 2.4
{ } { }{ } { }1
1*1 Fi
Fhh T
T
= (2.19)
{ } { } [ ]{ } gmgsF ⋅⋅Γ=⋅= 1111 φ (2.20)

25
g = acceleration of gravity
Now Equation 2.15 can be rearranged to solve for the required initial PT bar force as
follows:
CBFSCCBFSC
initialDCBFSC
initialDinitial Wb
OMb
OMPT −−−
−
⋅⋅−
⋅=
22,,,0 η
(2.21)
At PT bar yielding, the stresses in the PT bars are equal to the yield stress of the PT bars,
σY. The force in the PT bars at yield can be calculated as follows:
YPTY APT σ⋅= (2.22)
where APT and σY are the area and the yield stress of the PT bars, respectively.
Substituting Equation 2.17 and 2.22 into Equation 2.16 produces an equation to calculate
the initial area of PT steel required:
( )
Y
CBFSCinitialYinitialYCBFSC
initialPT
WOMOMb
Aσ
η −−
−⋅−⋅
=,,
,
2
(2.23)
The PT bars must then be selected such that APT≥APT,initial. The initial stress of the PT
bars, σ0, can then be calculated using the selected APT:
PT
initial
APT ,0
0 =σ (2.24)
Updated values of the OMD and OMY can be calculated as follows:

26
( )
−
⋅+⋅= −−
η11
2 0 CBFSCCBFSC
D WPTbOM (2.25)
( )
−
⋅+⋅= −−
η11
2 CBFSCYCBFSC
Y WPTbOM (2.26)
which are based on the free body diagrams at decompression and PT bar yielding
(Figures 2.3 and 2.4, respectively). The ratio of overturning moment at PT bar yielding
to the overturning moment at decompression, αY, will be used to determine the first mode
forces at PT bar yielding, and is calculated as:
D
YY OM
OM=α
(2.27)
2.6.1.5 Hysteretic Energy Dissipation Ratio βE
The hysteretic energy dissipation ratio (βE) is a key design parameter for self-
centering (SC) structural systems. It is representative of the relative energy dissipation
capacity of a SC system in comparison to a bilinear elasto-plastic system. Figure 2.8
shows schematic hysteresis loops for an SC-CBF system with friction based energy
dissipation and for a bilinear elasto-plastic system.
βE is defined as the ratio of the area of the flag-shaped hysteresis loop of an SC-CBF
system to the area of the hysteresis loop of a bilinear elasto-plastic system (Seo and Sause
2005). Assuming the area of the flag-shaped hysteresis loops to be trapezoidal, βE can be
approximated as:

27
( )D
YEDDED
E OM
OMOM ,,21
+=β
(2.28)
2.6.2 Structural Member Design Phase
2.6.2.1 Modal Truncation
The primary purpose of the structural member design phase is to determine the
member force design demands in the structural members and select member sizes such
that their capacities exceed the design demands. To determine the member force design
demands, modal lateral forces must be applied to the SC-CBF to determine the modal
internal forces and bending moments for each member. However, it may not be necessary
to include all modes. Modal truncation can be applied to reduce the number of modes
used to determine the axial force and bending moment design demands.
The number of modes to be included is determined by comparing the effective modal
masses to the total mass of the system. The effective modal mass of mode i, Mi*, is
calculated as follows:
{ } [ ] { }imM Tiii ⋅⋅⋅Γ= φ*
(2.29)
The total mass of the system is:
{ } [ ] { }imiM Ttotal ⋅⋅= (2.30)
The number of modes to be included is selected such that the sum of the first J modal
masses is greater than or equal to 95% of the total mass (Roke et al. 2010). The rest of the

28
modes can be truncated, as they will have negligible contributions to the member force
design demands.
2.6.2.2 Factored Design Demand
The next step in the structural member design phase is to determine modal member
force design demands for each member (i.e., axial forces and bending moments). Modal
load profiles for each mode to be included (after modal truncation) are determined
through a static analysis on a simple fixed-base analytical model using structural analysis
software (e.g., SAP2000). For the higher modes, the forces applied equal the entries in
the mass distribution matrix si (Equation 2.10) multiplied by g.
However, the first mode is designed at PT bar yielding. Unlike the higher modes,
which are designed using only the lateral forces, the first mode applied loads include the
lateral forces, frame weight, vertical friction forces at the lateral-load bearings, and the
PT bar yield force as shown in Figure 2.4 (Roke et al. 2010). The higher mode load cases
may be conducted using unit accelerations, whereas the lateral forces applied for the first
mode include a factor of αY,1:
{ } { }11,'1 ss Y ⋅= α (2.31)
where,
11, OM
OM YY =α (2.32)
{ } { } gshOM T ⋅⋅= 11 (2.33)

29
The friction forces at PT yield can then be calculated:
{ } { }'1, sF YED ⋅= µ (2.34)
The axial force and bending moment design demands are recorded from the analysis
for each modal load case. As higher mode load cases were conducted using unit
accelerations, higher mode peak member forces must be multiplied by the corresponding
design spectral acceleration (SAn) values. Modal spectral acceleration (SAn) values from
the design spectrum are factored by a safety factor γn, which is introduced to account for
potential bias and dispersion in higher mode responses (Roke et al. 2010). The value of γn
is equal to 1.15 for the first mode and 2.0 for the higher modes. Since study showed that
SC-CBFs are prone to significant amount of higher mode effects, such high conservative
values ofγn are set for higher modes (Roke et al. 2009).
Once the factored modal design demands are determined, the complete quadratic
combination (CQC) method is used to estimate the member factored design demands,
Fx,fdd, for each member. Factored design demands for axial forces and bending moments
are calculated for each member. The CQC method is defined as follows:
21
4
1
4
1,,,,,
⋅⋅= ∑∑
= =i jfddxjfddxiijfddx FFF ρ
(2.35)
where i and j are defined as the number of included modes, and the correlation
coefficients are (Roke et al. 2010):

30
≠=
=jiifjiif
ij 25.00.1
ρ (2.36)
2.6.2.3 Capacity Check
The factored design demands, Fx,fdd, determined using Equation 2.35 are then
compared against the member capacities. Since SC-CBF connections are assumed to
transmit bending moment along with axial forces, these checks were performed using the
following bending moment and axial force interaction equations (AISC 2005b):
2.00.198
≥≤
+⋅+
nc
r
nyb
ry
nxb
rx
nc
r
PPfor
MM
MM
PP
φφφφ (2.37)
2.00.12
<≤
++
⋅ nc
r
nyb
ry
nxb
rx
nc
r
PPfor
MM
MM
PP
φφφφ (2.38)
where,
Pr = factored design axial force demand determined from second-order analysis
(AISC 2005b)
φc = compression resistance reduction factor, equal to 0.9
Pn = nominal compressive strength of the member
Mrx = factored design strong axis bending moment demand determined from
second-order analysis (AISC 2005b)
Mry = factored design weak axis bending moment, assumed to be zero

31
φb = flexural bending resistance reduction factor, equal to 0.9
Mny and Mnx = nominal flexural strength about each cross-sectional axis of the
member
If the interaction equations are not satisfied, the member sizes must be increased, and
another iteration of design is necessary.
2.6.3 PT Bar Design Phase
2.6.3.1 Decompression Roof Drift
The first step in the PT steel design phase is to determine roof drift at column
decompression, θD. As both the factored roof drift design demand, θDBE,fdd, and the roof
drift capacity of the SC-CBF, θY,N, are directly related to θD, this calculation is very
important for the PT bar design phase. A simple analytical fixed-base model is developed
using structural analysis software (e.g., SAP2000) to perform a static analysis of the SC-
CBF at column decompression. The forces to be included in the analysis are the lateral
forces, vertical friction forces, frame self-weight and initial PT force as shown in Figure
2.3. The lateral forces at column decompression are calculated as follows:
{ } { }11, FF DD ⋅= α (2.39)
where,
11, OM
OM DD =α
(2.40)

32
The vertical friction forces at decompression can be calculated by:
{ } { }DDED FF ⋅= µ, (2.41)
The recorded lateral roof displacement is divided by the total height of the frame to
calculate θD.
2.6.3.2 Factored Roof Drift Design Demand
One of the design objectives for SC-CBF is that PT bars should not yield under
median DBE-level seismic inputs, which means the probability of PT bar yielding under
DBE-level seismic input should be less than 50% (Roke et al. 2010). Therefore, the
median DBE roof drift demand is taken as the design demand for the PT bar yielding
limit state. Figure 3.9 shows a schematic of the idealized overturning moment versus roof
drift response of an SC-CBF system. The DBE roof drift demand, θDBE,dd, can be
calculated based on the ductility demand, µDBE and the roof drift at column
decompression, θD:
DDBEddDBE θµθ ⋅=, (2.42)
The ductility demand of the system, µDBE can be calculated from standard
relationships between μ, R, and T determined from single-degree-of-freedom nonlinear
analyses of SC systems (Seo and Sause 2005). The μ-R-T relationship for SC systems is
as follows:
)(,
1TpDADBE R=µ (2.43)

33
where,
( )
=
21
11 exp cT
cTp (2.44)
( )2
1 kbac α−= (2.45)
( )2
2 kdcc α−= (2.46)
The coefficients a, b, c, and d are functions of βE and the site soil conditions (site class)
(Seo 2005). Values of these coefficients are given in Table 2.2. For calculation of µDBE, in
equation 2.42, RA,D is used instead of the code-based response modification coefficient,
R. RA,D is the ratio of the required strength of the structure for it to remain elastic during
median DBE-level response to the actual strength of the structure (Roke et al. 2010). The
coefficient is determined by:
D
elasticDA OM
OMR 1,
, = (2.47)
OMelastic,1 is the required elastic strength of the structure (considering only the first mode
effective modal mass) and it can be determined by (Roke et al. 2010):
elastictotal
elastic OMMMOM ⋅=
*1
1,
(2.48)
where,

34
ELFelastic OMROM ⋅= (2.49)
R = 8 (assumed for SC-CBF systems)
The design demand, θDBE,dd, as calculated by equation 2.42, is factored by γθ to
control the probability of roof drift response under the DBE, θDBE exceeding the design
demand. In this case, γθ is assumed to be equal to 1.0, which indicated a 50% probability
that the PT bars will yield under the median DBE-level earthquake (Roke et al. 2010).
The factored DBE-level design demand is equal to:
DBEfddDBE θγθ θ ⋅=, (2.50)
2.6.3.3 Roof Drift Check
The factored roof drift design demand must be compared to the roof drift capacity at
PT bar yielding, θY,N, which is calculated from the roof drift ductility demand at PT bar
yielding, µY (Roke et al. 2010):
DYNY θµθ ⋅=, (2.51)
µY is determined as follows:
K
KYY α
ααµ
1−+=
(2.52)
αk is the ratio of the elastic and post-decompression stiffness of the frame (Roke et. al.
2010):

35
elastic
pdk k
k=α
(2.53)
Where,
D
Delastic
OMkθ
= (2.54)
−
⋅
⋅
⋅= −
η11
2
2CBFSC
PT
PTPTpd
bL
EAk (2.55)
where LPT and EPT are the length and elastic modulus of the PT bars, respectively.
For PT steel adequacy, θY,N should be greater than θDBE,fdd. If this condition isn’t
satisfied, the PT bar area should be increased and another design iteration should be
performed.
2.6.4 Design of the Adjacent Gravity Columns
The final step in the SC-CBF design procedure is the design of adjacent gravity
columns. The adjacent gravity column is designed to carry all the gravity loads from the
tributary floor area, as well as the vertical friction forces from the lateral load bearings.
The design of the adjacent gravity columns is relatively simple, as these columns have
fixed base and do not uplift like the SC-CBF columns. Three main design cases for the
adjacent gravity columns are considered: (1) loading to PT bar yielding, (2) unloading
after PT bar yielding, and (3) zero lateral loading. Cases (1) and (2) are shown in Figure
2.9(a) and 2.9(b), which show free body diagrams of the adjacent gravity column at PT
36
bar yielding and after PT bar yielding, respectively. At PT bar yielding, the friction
forces from the lateral load bearings act vertically downward on the SC-CBF, resisting
the rocking response, so the opposing forces act upward on the adjacent gravity column.
This reduces the total vertical force on the adjacent gravity column.
However, during unloading after PT bar yielding, the friction forces act upward on
the SC-CBF, resisting column base gap closure, and thus act downward on the adjacent
gravity column. These forces add to the total vertical force on the adjacent gravity
column.
The zero lateral load case consists of only gravity loads; no friction forces are
present in this design case. Unloading after PT bar yielding is typically the governing
load case for design of the adjacent gravity columns. The design demands from this case
are compared to the capacity of the selected members using Equations 2.37 and 2.38,
with the moments in the adjacent gravity columns assumed to be zero (Roke et al. 2010).

37
Table 2.1 – Summary of Performance Based Design Objectives Seismic
Input Level Performance
Level Limit States
Column Decompression
PT Bar Yielding
Member Yielding
Member Failure
DBE IO Permitted Minor Yielding Permitted
Not Permitted
Not Permitted
MCE CP Permitted Permitted Permitted Not Permitted
Table 2.2 – Regression coefficients a, b, c, and d for Equations 2.50 and 2.51 (Seo 2005)
Site Class βE (%) A b c d
C
0.0 0.636 0.306 0.713 0.111 12.5 0.569 0.264 0.769 0.115 25.0 0.515 0.222 0.816 0.113 100.0 0.412 0.498 0.904 -0.415
D
0.0 0.729 0.399 0.624 0.0657 12.5 0.657 0.327 0.678 0.0756 25.0 0.597 0.288 0.728 0.0677 100.0 0.457 0.500 0.872 -0.305

38
Figure 2.1 – Schematic configuration of an SC-CBF system
Lateral-load Bearing
Adjacent gravity column
SC-CBF column
PT bar
Distribution Strut

39
Figure 2.2- SC-CBF behavior under lateral loading: (a) elastic deformation under low level of forces; (b) column uplifting under high level of forces
Applied Force
Column Gap Opening
(a) (b) Roof Drift

40
Figure 2.3- Typical force distribution at column decompression (Jeffers 2012)
PT0
WSC-CBF
FD,1
FD,2
FD,3
FD,4
FCon
Vb,D=∑FD,iss bSC-CBF
bED
Point of contact of compression column
FED,1
FED,3
FED,2
FED,4
Centerline of adjacent gravity column

41
Figure 2.4- Typical force distribution at PT bar yielding (Jeffers 2012)
PTY
WSC-CBF
FY,1
FY,2
FY,3
FY,4
FCon
Vb,Y=∑FY,i s s bSC-CBF
bED
Point of contact of compression column
FED,Y,1
FED,Y,3
FED,Y,2
FED,Y,4
Centerline of gravity column

42
Figure 2.5 – Idealized base shear-roof drift response of an SC-CBF
Base Shear
Roof Drift
Member failure
Member yielding
PT bar yielding
SC-CBF column decompression

43
Figure 2.6 – Schematic of performance based design criteria
Base Shear
Roof Drift
Member failure
Member yielding
PT bar yielding
Column decompression
DBE MCE
IO CP
Limit of Performance Levels
Median Response for Hazard Levels
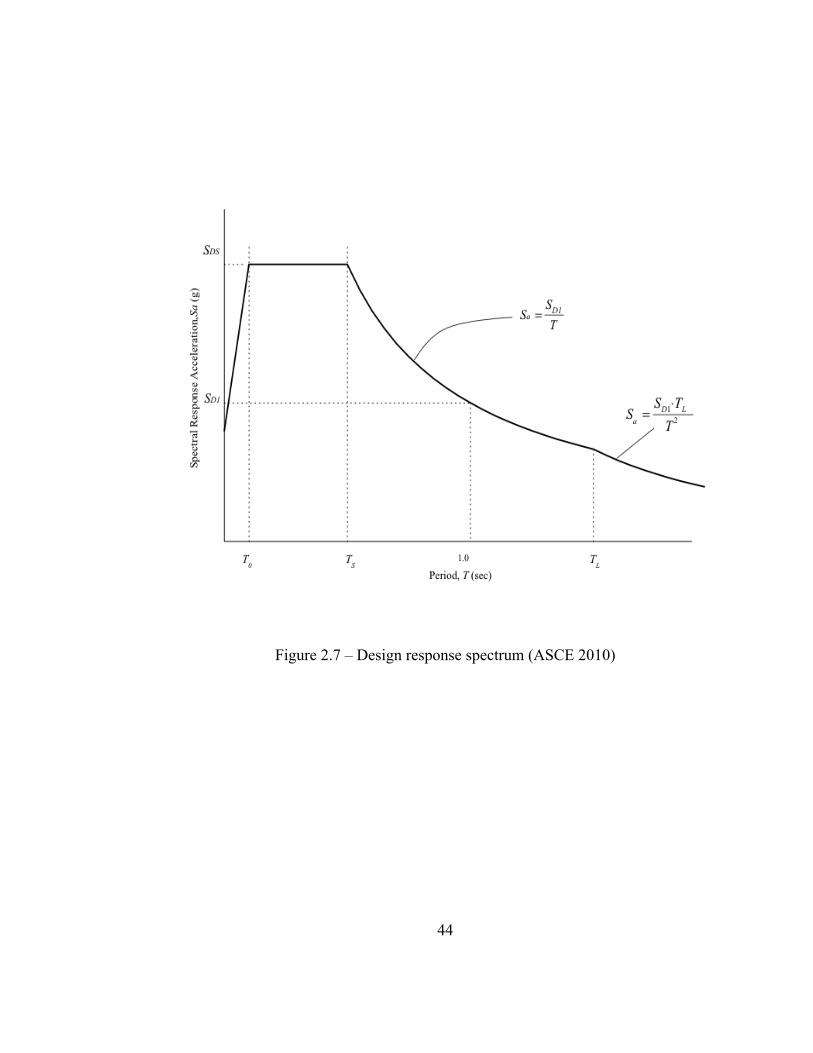
44
Figure 2.7 – Design response spectrum (ASCE 2010)

45
Figure 2.8- Hysteretic response of an SC-CBF system with friction-based energy dissipation compared to that of a bilinear elasto-plastic system. (Jeffers 2012)
OM
θ
OMY
OMD
OMDHysteresis loop for a bilinear elasto-plastic system
Flag-shaped hysteresis loop for an SC-CBF with friction based energy dissipation
2·OMED,D
2·OMED,Y
2·OMED,D
2·OMED,Y

46
Figure 2.9- Schematic of idealized overturning moment versus roof drift response of an SC-CBF system (Roke 2010)
OM
θ
OMY
OMDBE
OMD
θD
θDBE,dd = μDBE∙θD
θY,n = μY∙θD
kpd = αk∙kelastic
kelastic

47
Figure 2.10 – Design cases for the adjacent gravity column: (a) PT bar yielding; (b)
unloading after PT bar yielding (Jeffers 2012)
F1
F2
F3
F4
VED VED
0
(a)
(b)
F1
F2
F3
F4
VED
0
VED
F4
F3
F2
F1
F4
F3
F2
F1
F4
F3
F2
F1
F4
F3
F2
F1

48
CHAPTER III
DESIGN AND ANALYSIS RESULTS
3.1 Overview One of the primary purposes of this research is to study the effect of the frame
geometry on the behavior and performance of SC-CBFs under lateral loading. Three
different SC-CBF prototype structures with varying braced bay widths have therefore
been developed, designed, and numerically analyzed. This chapter first introduces the
prototype buildings and summarizes the designs. Next, the analytical models developed
to run numerical analyses are explained and the analysis results for all three prototypes
are presented. Finally, the design and analysis results are compared and studied to
determine the effect of frame geometry on SC-CBF behavior and performance.
3.2 Prototype Buildings
The prototype buildings considered for this study are assumed to be four story office
buildings located in a stiff soil site (Site Class D (ASCE 2010)) at Van Nuys, California.
SC-CBFs are incorporated in the prototype buildings as the only lateral-load resisting
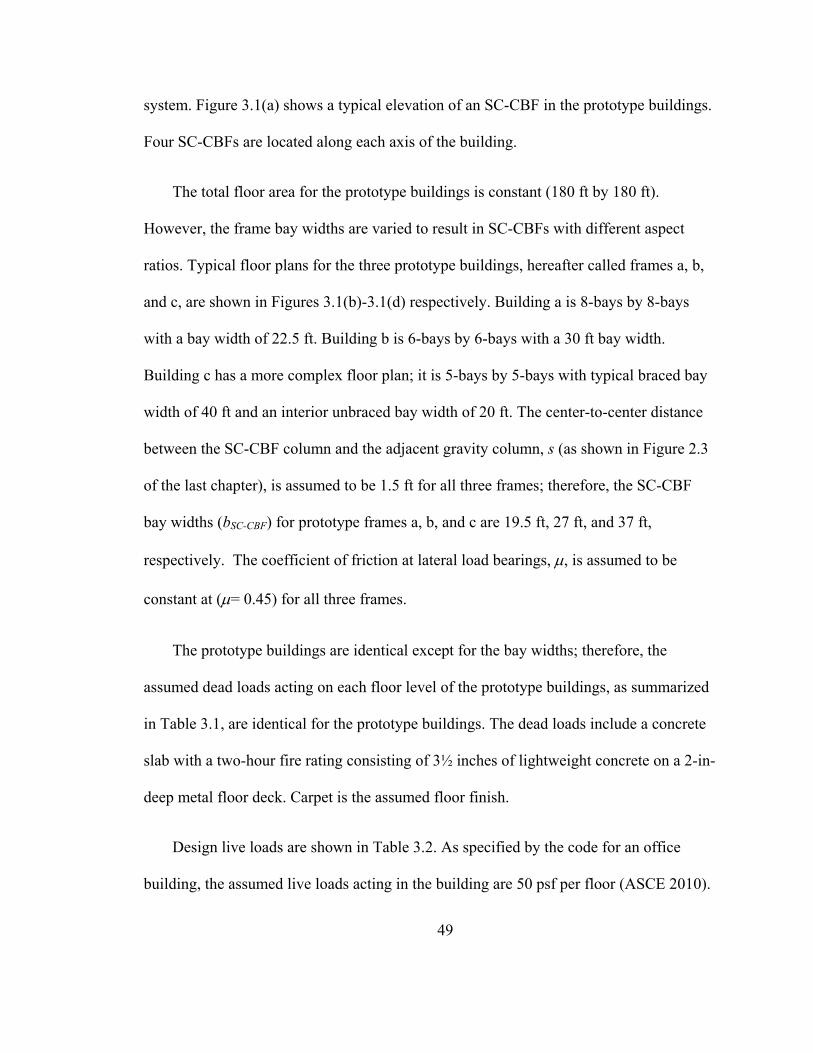
49
system. Figure 3.1(a) shows a typical elevation of an SC-CBF in the prototype buildings.
Four SC-CBFs are located along each axis of the building.
The total floor area for the prototype buildings is constant (180 ft by 180 ft).
However, the frame bay widths are varied to result in SC-CBFs with different aspect
ratios. Typical floor plans for the three prototype buildings, hereafter called frames a, b,
and c, are shown in Figures 3.1(b)-3.1(d) respectively. Building a is 8-bays by 8-bays
with a bay width of 22.5 ft. Building b is 6-bays by 6-bays with a 30 ft bay width.
Building c has a more complex floor plan; it is 5-bays by 5-bays with typical braced bay
width of 40 ft and an interior unbraced bay width of 20 ft. The center-to-center distance
between the SC-CBF column and the adjacent gravity column, s (as shown in Figure 2.3
of the last chapter), is assumed to be 1.5 ft for all three frames; therefore, the SC-CBF
bay widths (bSC-CBF) for prototype frames a, b, and c are 19.5 ft, 27 ft, and 37 ft,
respectively. The coefficient of friction at lateral load bearings, µ, is assumed to be
constant at (µ= 0.45) for all three frames.
The prototype buildings are identical except for the bay widths; therefore, the
assumed dead loads acting on each floor level of the prototype buildings, as summarized
in Table 3.1, are identical for the prototype buildings. The dead loads include a concrete
slab with a two-hour fire rating consisting of 3½ inches of lightweight concrete on a 2-in-
deep metal floor deck. Carpet is the assumed floor finish.
Design live loads are shown in Table 3.2. As specified by the code for an office
building, the assumed live loads acting in the building are 50 psf per floor (ASCE 2010).

50
As specified by the code, the partition load (which is part of the live load) is assumed to
be equal to 15 psf, and the roof live load is assumed to be 20 psf. Gravity loads (live and
dead loads) acting on each adjacent gravity column are summarized in Table 3.3.
In the analytical models developed for this research, a lean-on column is used to
represent the gravity columns in the tributary area of an SC-CBF, except the \ gravity
columns adjacent to the modeled SC-CBF (Roke et al. 2010). Table 3.4 shows the total
gravity loads acting on the lean-on column.
3.3 Design Results
As described in Chapter 2, the primary objectives of an SC-CBF design are to
determine PT steel area and to select the sizes of SC-CBF members (columns, beams,
braces, strut) and gravity columns. All three prototype buildings have been designed
using the PBD procedure for SC-CBF systems.
The SC-CBF member selections are presented in Figures 3.2, 3.3, and 3.4, for frames
a, b, and c, respectively. The member sizes for frame a are typically larger compared to
those of frames b and c. The member sizes for frames b and c are similar, with identical
section sizes for the lower story braces, upper story columns, and beams.
Due to the different floor plans (Figure 3.1), the quantity and tributary area of the
gravity columns is different for the three prototype buildings. As a result, the sizes of the
standard gravity columns and the adjacent gravity columns are also different in three
designs. Table 3.5 presents the gravity column sizes and lean on column areas for all
three prototype buildings.

51
Table 3.6 summarizes the SC-CBF design results. The tabulated values include the
frame width, bSC-CBF; the frame weight; the PT bar area, APT; the hysteretic energy
dissipation ratio, βE; design parameterη; the overturning moment at decompression,
OMD; the overturning moment at PT bar yielding, OMY; pre-decompression or elastic
stiffness, kelastic; and post-decompression stiffness, kpd. The PT steel area decreases with
the increase in SC-CBF bay width: frames a, b, and c have PT bar areas of 15.72 in2, 9.48
in2, and 7.50 in2, respectively. The frame weights exhibit no trend with changing frame
geometry, as the weights of frames a and c are both higher than that of frame b.
βE andη increase with increasing bSC-CBF. Therefore, the SC-CBF with the highest
frame bay width has the highest energy dissipation capacity. However, the magnitudes of
OMD and OMY exhibit no trends with changing frame geometry. The values of OMD and
OMY are nearly equal for frames a and b; but OMD and OMY for frame c are significantly
higher than those of the other frames. Both elastic and pre-decompression stiffness values
increase with the increase of frame bay width.
3.4 Analytical Model
Nonlinear analytical models of the prototype structures have been created in
OpenSees (Mazzoni et al. 2009) for static pushover and dynamic time history analyses.
For each prototype structure, the analytical model represents a single SC-CBF and its
tributary area, as shown in Figure 3.1. The basic components of the models are the SC-
CBF, the PT bars, the adjacent gravity columns, the lean-on column, and the lateral load
bearings.

52
The SC-CBF structural members (beams, columns, braces and strut) are modeled as
linear elastic elements so that the force demands in these members can be determined.
The nodes in the model are located at the working points of the connections between SC-
CBF members, and these connections are assumed to be rigid (Roke et al. 2010). The PT
bars are modeled as nonlinear beam-column elements with negligible flexural and shear
stiffness and a post-yielding axial stiffness equal to 2% of the initial axial stiffness.
Column base decompression is modeled using compression-only gap elements
located at the base of the SC-CBF columns. These elements allow uplift of the column
base, but still provide a linear-elastic compressive resistance when the column base is in
contact with the foundation. Horizontal force (i.e., base shear force) resistance at the
column base is provided only when the column is in contact with the foundation; only the
column that is in contact with the foundation provides base shear force resistance.
Sliding at the base due to slip is not permitted in these SC-CBF models.
The lateral-load bearing elements were modeled as contact friction gap elements
with a defined coefficient of friction, µ. These elements are similar to the gap elements
used at the column bases, though they also develop transverse friction forces under the
action of a compressive force. Initial gaps in these elements were set to 0.02 inches at
each floor level (i.e., these elements provide no compressive resistance until the
compressive deformation exceeds 0.02 inches).
A lean-on column is incorporated into the analytical model to account for P-Δ
effects. The lean-on column represents the strength and stiffness of the standard gravity
53
columns (i.e., not the gravity columns directly adjacent to the SC-CBF columns) in the
tributary area of the modeled SC-CBF. The nodes at the floor levels of the lean-on
column and the adjacent gravity columns are modeled to have the same degree of
freedom in the lateral direction (i.e., each floor has one horizontal degree of freedom).
For static analysis, the lateral loads are applied on the lean-on column.
The analytical models used for dynamic analyses included seismic masses that were
lumped on the lean-on column nodes at each floor level. Damping is incorporated in the
dynamic analytical models through a damping substructure (Roke et al. 2010) that
utilizes Rayleigh damping coefficients. The Rayleigh damping coefficients α and β were
determined using 2% damping in the first mode and 5% damping in the third mode.
3.5 Nonlinear Static Analysis
Nonlinear static analyses were performed on each of the analytical models to verify
that the SC-CBFs exhibited the expected behavior under lateral loading. The static
pushover responses were then compared to study the effect of frame geometry on SC-
CBF behavior. Monotonic and cyclic pushover analyses were performed using OpenSees.
The load profiles used for these analyses are proportional to the first mode forces, which
were calculated based on the elastic mode shape of the fixed-base SC-CBFs. This section
presents the analysis results in detail.
3.5.1 Monotonic Pushover Study
Monotonic pushover analysis was conducted on each SC-CBF up to 3% roof drift,
well beyond the limit state of PT bar yielding (which occurs at around 1% - 1.5% roof

54
drift). The analysis results are presented as overturning moment versus roof drift plots, as
shown in Figure 3.5. Figure 3.5(a) shows the pre-decompression (elastic) response of the
systems, and Figure 3.5(b) shows the full range of response.
The elastic stiffness of each frame is a function of the SC-CBF member size and
member length. The differences in member sizes for different frames are offset by the
differences in member lengths. Even though the member sizes are relatively smaller for
frame c, due to its relatively larger bay width frame c has a slightly greater elastic
stiffness than the other frames as shown in Figure 3.5(a). The frames a and b have almost
identical elastic stiffness. The stiffness values tabulated in Table 3.6 also show that the
differences in stiffness values of frames b and c are much higher compared to those of
frames a and b.
The limit state of column decompression is a function of the initial force in the PT
bars, the weight of the SC-CBF members, and the frame width. As shown in Table 3.6
and Figure 3.5, frame c has the highest value of OMD, whereas the values of OMD for
frames a and b are very close; the difference in initial PT bar force and frame weight for
frames a and b are offset by the difference in frame width. Similarly, frame c has the
highest value of OMY, while the values of OMY for frames a and b are close to one
another.
The roof drift capacity at PT bar yielding, which is a function of initial PT bar stress
and frame geometry, is highest for frame a and lowest for frame c. Therefore, for these
designs with identical initial stresses in the PT bars, the increase in frame width results in

55
a decrease in the roof drift capacity at PT bar yielding. However, the roof drift capacities
at column decompression seem to be somewhat similar for all three frames.
3.5.2 Cyclic Pushover Study
Cyclic pushover analyses were performed on the prototype SC-CBFs to verify and
study the energy dissipation capacity of the systems. As with the monotonic pushovers,
the lateral forces applied to the frames were proportional to the first mode lateral forces.
Loading was incremented until each frame underwent 1% roof drift, at which point the
loading was until the SC-CBF returned to its initial condition.
Figure 3.6 shows the overturning moment-roof drift response for the prototype
frames. The difference in energy dissipation ratio (βE) for the three SC-CBF designs, as
tabulated in Table 3.6, is evident. Frames a and b have almost the same values of OMD;
but the higher “unloading” overturning moment in frame b causes a wider hysteresis loop
and thus a higher βE value for frame b. This is due to the higher post-decompression
stiffness in frame b. Again, frame c has almost similar “unloading” overturning moment
as frame b; but due to higher OMD in frame c results in a higher βE value for frame c.
3.6 Nonlinear Dynamic Analysis
Nonlinear dynamic analyses were conducted in OpenSees on the three prototype SC-
CBFs using a suite of DBE-level ground. This section elaborates the selection of ground
motion records and presents the analysis results to perform an in-depth study on the
seismic response of SC-CBF systems.
56
3.6.1 Ground Motion Records
A suite of 30 DBE-level ground motion records were selected to assess the response
of SC-CBF frames under seismic input. The theory behind the selection of these ground
motion records is beyond the scope of this thesis. This section roughly summarizes the
selection method, which is explained in detail by Roke et al. (2010).
Hazard disaggregation was used to determine the magnitude, M, and distance, D,
combinations for ground motions with a spectral acceleration at the first mode period of
the designed systems, SA(T1), that are banded around the target value, SADBE(T1). A third
parameter,ε, indirectly characterizes the spectral acceleration for a given ground motion
relative to the expected spectral shape: a positive value of ε indicates a high spectral
acceleration at T1 relative to the spectrum away from T1, while a negative value of ε
indicates a low spectral acceleration at T1 relative to the spectrum away from T1. The
ground motions were selected to closely match the disaggregation results for a Van Nuys,
California, site in terms of the parameters M, D, and ε. Table 3.7 lists the values of M,
D,ε, as well as the scale factors used to approximate the DBE, for each ground motion
pair.
3.6.2 Peak Dynamic Responses
Numerical analyses of each of three prototype SC-CBFs were conducted using the
suite of DBE-level ground motions. The peak values of response quantities (e.g., floor
displacements, member forces, PT bar forces etc.) determined from the time history
analyses are used to represent the DBE-level demand for each SC-CBF system. The peak
57
column gap opening responses are considered to determine the degree of rocking in
different frames. The other response quantities that are of major concern for assessing the
seismic behavior of SC-CBF systems are base shear, roof drifts, inter-story drifts, brace
forces and PT bar forces.
Tables 3.8, 3.9, and 3.10 tabulate the gap opening and base shear response data of
frames a, b, and c, respectively. The data presented in these tables are: ∆gap,L, peak gap
opening at the left column; ∆gap,R, peak gap opening at the right column; ∆gap,max,
maximum gap opening for any column; Vb,max, peak base shear. Table 3.11 presents the
mean and standard deviation values of these gap opening and base shear responses for the
three prototype SC-CBFs. As the frame bay width increases, the gap opening response
also increases; that means there will be more rocking response. The base shear response
also increases with the increase of frame bay width.
The data presented in these tables also include vbn, base shear overstrength factor,
which is equal to peak base shear normalized by the design base shear. The design base
shear is equivalent to the ELF base shear determined using ASCE7 (2010), which
specifies an overstrength factor of 2.0 for conventional CBF systems. The data presented
in Table 3.11 show that the value of vbn for SC-CBF systems is greater than the value
specified for conventional CBF systems, indicating that increased system strength
contributes to the performance of SC-CBF systems.
Tables 3.12, 3.13, and 3.14 tabulate the drift response data of frames a, b, and c,
respectively. The data presented in these tables are: θDBE, the maximum roof drift; θs,i, the

58
maximum story drift for story i; and θs,max, the peak story drift in any story. Table 3.15
presents the mean and standard deviation values of these peak drift quantities for the
three prototype SC-CBFs. These values indicate that story drifts are typically larger for
the higher (3rd and 4th) stories than for the lower stories. The story drifts tend to decrease
slightly with the increase of frame bay width. Figure 3.7 shows the distribution of peak
roof drift responses for different ground motions for all three frames. The mean peak roof
drift response decreases with the increase of frame bay width; frame a has the highest
mean peak roof drift values and frame c has the lowest.
Brace forces are the most important member forces, since braces provide the lateral
stiffness of the frame and are susceptible to the most damage while the frame undergoes
lateral drift. Tables 3.16, 3.17, and3.18 present the peak brace force and PT bar force
responses for frames a, b, and c, respectively. The peak brace force response in story i is
represented by Fbri. Table 3.19 shows the brace axial force capacities for each SC-CBF
design. These axial force capacities represent the limit beyond which the braces will start
to exhibit nonlinear behavior. However, all of the structural members (e.g., braces,
beams, and columns) were modeled as linear elastic elements in the OpenSees analytical
model; the analysis results will therefore be meaningless if the value of Fbri exceeds the
corresponding normalized brace axial force capacity tabulated in Table 3.15. Highlighted
values in Tables 3.17 and 3.18show that Fbr1 exceeds the brace axial force capacity in
several ground motion responses for frame b and frame c. Table 3.20 shows the mean and
standard deviation for brace force and PT bar force responses. The mean Fbri results show
that the brace force responses decrease with the increase of the frame bay width.

59
Tables 3.16, 3.17, and 3.18, in addition to showing the Fbri results, also present the
values of peak PT bar force, PTmax, and peak normalized PT bar force, PTmax,norm, which
is equal to peak PT bar force normalized by the PT bar force at yield, PTY. The values of
PTmax,norm exceeding 1.0 indicates that PT bar has yielded for that particular ground
motion record. For frames b and c, PT bar yields on a few occasions. Since SC-CBFs are
designed to allow for minor PT bar yielding under DBE-level earthquake, this is not
going to be a problem. The data presented in Table 3.20 suggest that as the frame bay
width increases, resulting in a decrease in peak PT force responses as well. This is
consistent with the trend in the decrease in PT bar areas with the increase in frame bay
width. However, the normalized PT force response increases with the increase of frame
bay width. Thereby, the probability of PT bar yielding increases with the increase of
frame bay width.
3.6.3 Time History Responses
The previous section summarized the peak dynamic response results, averaged over
all the ground motions; however, a more elaborate look at the time history response is
required to investigate the behavior of SC-CBF systems under DBE-level ground
motions. A representative ground motion response is therefore selected in this section to
study the time history of various response quantities (e.g., roof drift, PT bar force,
overturning moment, and column base gap-opening). The representative ground motion
response was chosen such that it showed the previously mentioned trend in the roof drift
responses with the changing frame bay width.
60
The data presented in Table 3.11 and Figure 3.7 show that the mean peak roof drift
response tends to decrease with the increase in the frame bay width. The roof drift
responses for several ground motions exhibit trends similar to that of the mean values.
Among those records, the arl360 ground motion was selected as the representative
ground motion because the roof drift responses to this ground motion are also close to the
corresponding mean values.
Figures 3.8, 3.9, and 3.10 show the roof drift time history responses of frames a, b,
and c, respectively, subjected to ground motion arl360. The peak roof drift responses are
0.85%, 0.73%, and 0.66% for Frames a, b, and c, respectively. Zero roof drift responses
at the end of ground motion duration show that the structure self-centers following the
earthquake.
Figures 3.11, 3.12, and 3.13 show PT bar force responses of all three SC-CBFs under
arl360. As shown in Table 3.6, the PT bar areas are different for the three frames, with
frame a having the highest area and frame c having the lowest area. Consequently, PT bar
responses in frame a are the highest among the three frames. The initial PT forces in
frames a, b, and c are 755 kips, 455 kips and 360 kips, respectively (i.e., the initial stress
is 40% of the yield stress for each design). The PT yield forces are 1886 kips for frame a,
1138 kips for frame b, and 900 kips for frame c. Under arl360, PT bar force responses are
well below the PT yield force for each SC-CBF; the peak PT force responses for frames
a, b, and c are 1286 kips, 826 kips and 664 kips, respectively. In conclusion, the increase
of frame bay width decreases the PT bar area, thereby decreasing the PT force response
as well. However, if the peak PT force responses are normalized by the corresponding

61
yield forces, the normalized responses for frames a, b, and c will be 0.68, 0.73 and 0.74.
That means, the normalized peak PT force responses increases slightly with the increase
of frame bay width.
Figures 3.14, 3.15, and 3.16 show the PT bar force responses and column gap
opening responses in the same plot. For simplicity, only the column base gap opening at
the left SC-CBF column is shown. Following the expected behavior of SC-CBF systems,
the PT bar force is at its maximum when the column base gap opening is at its maximum.
These points also correspond to the peak roof drift. The magnitudes of the peak column
base gap opening for frame a are 1.14 inches for the left column and 1.78 inches for the
right column. For frame b the peak column base gap openings are 1.36 inches for the left
column and 2.09 inches for the right column. For frame c the peak column base gap
openings are 2.32 inches for the left column and 2.10 inches for the right column. These
results suggest that as the frame bay width increases, the peak column base gap opening
increases, meaning that frames with higher bay width tend to exhibit more significant
rocking behavior.
Figures 3.17, 3.18, and 3.19 show the first story brace axial force response to the
arl360 ground motion. The first story left brace was chosen as the sample member for all
three frames. Figures show that the peak brace force responses are well below their
corresponding design demand values for all three frames. The magnitudes of peak brace
force responses for frames a, b, and c are 880 kips, 811 kips and 765 kips, respectively.
The peak response decreases with the increase in the frame bay width; which is consistent
with the previous observations.

62
Figures 3.20, 3.21, and 3.22 show the overturning moment versus roof drift
hysteretic responses for the prototype SC-CBFs subjected to the arl360 ground motion.
Each SC-CBF exhibits the expected flag-shaped hysteretic behavior. The hysteresis
responses of frames a and b are very similar. Of the three hysteresis loops, the loop for
frame c is the closest to the ideal hysteresis response shown in Figure 2.8. The responses
for frames a and b exhibit many fluctuations from the ideal shape in the post-
decompression region. The causes of this roughness in hysteresis responses are subjects
of ongoing research.
Figures 3.23, 3.24, and 3.25 show the overturning moment versus column gap
opening hysteresis loops for the prototype SC-CBFs subjected to arl360. The loops in
these plots closely resemble the loops formed in Figures 3.20-3.22, demonstrating the
strong correlation between roof drift and column base gap opening of the SC-CBF system
(also shown in Figures 3.14-3.16). Since rocking response drives the roof drift response,
roof drift is at its peak when the column base gap opening is at its maximum. It is to be
noted that the frames a and b have similar responses for overturning moment-gap opening
hysteresis loops, as seen in Figures 3.20-3.22 for the overturning moment-roof drift
hysteresis loops.
3.7 Summary
This chapter introduced the prototypes and presented their design results. The
analytical model for each prototype SC-CBF is described. Nonlinear monotonic and
cyclic pushover analysis was performed for each prototype and the design results were

63
compared against each other to study the effect of frame geometry on the behavior of SC-
CBF systems under static lateral loading. A suite of DBE-level ground motion was used
to carry out nonlinear dynamic analyses for each frame. The peak dynamic responses for
different response quantities (e.g. SC-CBF column gap opening, base shear, roof drift,
story drift, brace force, PT bar force) are presented. The mean values of these responses
are compared for different prototype to determine the effect of frame geometry on these
response quantities. As the frame bay width increases, the base shear increases that
induces a higher SC-CBF column gap opening (i.e. more rocking response). The rocking
response softens the structural responses. Therefore, as the frame bay width increases, the
roof drift, brace force and PT bar force responses decreases due to a higher rocking
response. However, the probability of PT bar yielding increases with the increase of
frame bay width.

64
Table 3.1 – Design dead loads at each floor level
Dead Loads Floor 1 Floor 2 & 3 Roof
(psf) (psf) (psf) Floor/roof slab 43 43 0 Floor/roof deck 3 3 0
Roofing material 0 0 6 Mechanical weight 10 10 20
Ceiling material 5 5 5 Floor finish 2 2 0
Steel fireproofing 2 2 2 Structural steel 15 15 10
Exterior wall (per sq. ft. of floor area) 0 7 8.3
Total 80 87 51.3
Table 3.2– Design live loads at each floor level
Dead Loads Floors 1-3 Roof
(psf) (psf) Office 50 0
Partitions 15 0 Roof live load 0 20
Table 3.3 – Summary of gravity loads on each adjacent-gravity column
Floor Dead Load (kip) Live Load (kip) Frame a Frame b Frame c Frame a Frame b Frame c
1 44.4 78.9 140.2 22.4 36.0 59.0 2 44.0 78.3 139.1 22.4 36.0 59.0 3 44.0 78.3 139.1 22.4 36.0 59.0 4 25.9 46.1 82.0 5.9 9.0 14.0

65
Table 3.4 – Summary of gravity loads on the lean-on columns
Floor Dead Load (kip) Live Load (kip)
Frame a Frame b Frame c Frame a Frame b Frame c 1 621.1 552.1 464.5 78.3 63.0 48.9 2 616.2 547.7 460.8 78.3 63.0 48.9 3 616.2 547.7 460.8 78.3 63.0 48.9 4 363.2 322.9 271.6 20.7 15.8 11.6
Table 3.5 – Summary of gravity column sections and lean-on column areas
Frame Gravity Column
Section Adjacent Gravity Column
Section Lean-on Column Area
(in2) 1st and 2nd
Stories 3rd and 4th
Stories 1st and 2nd
Stories 3rd and 4th
Stories 1st and 2nd
Stories 3rd and 4th
Stories A W8x31 W8x24 W8x48 W8x24 176.4 129.2 B W8x48 W8x24 W10x77 W8x40 161.5 81.8 C W10x77 W8x35 W10x112 W8x58 178.8 85.7
Table 3.6 – Comparison of design parameters
Frame bSC-CBF
(ft) Weight (kips)
APT (in2) βE η
OMD (kip-ft)
OMY (kip-ft)
kelastic
(kip-ft) kpd
(kip-ft) A 19 45.8 15.72 0.43 0.25 10410 25130 1.9x107 1.1x106 B 27 39.1 9.48 0.59 0.35 10200 24290 2.1x107 1.5x106 C 37 45.5 7.50 0.79 0.48 14305 33355 2.8x107 2.8x106
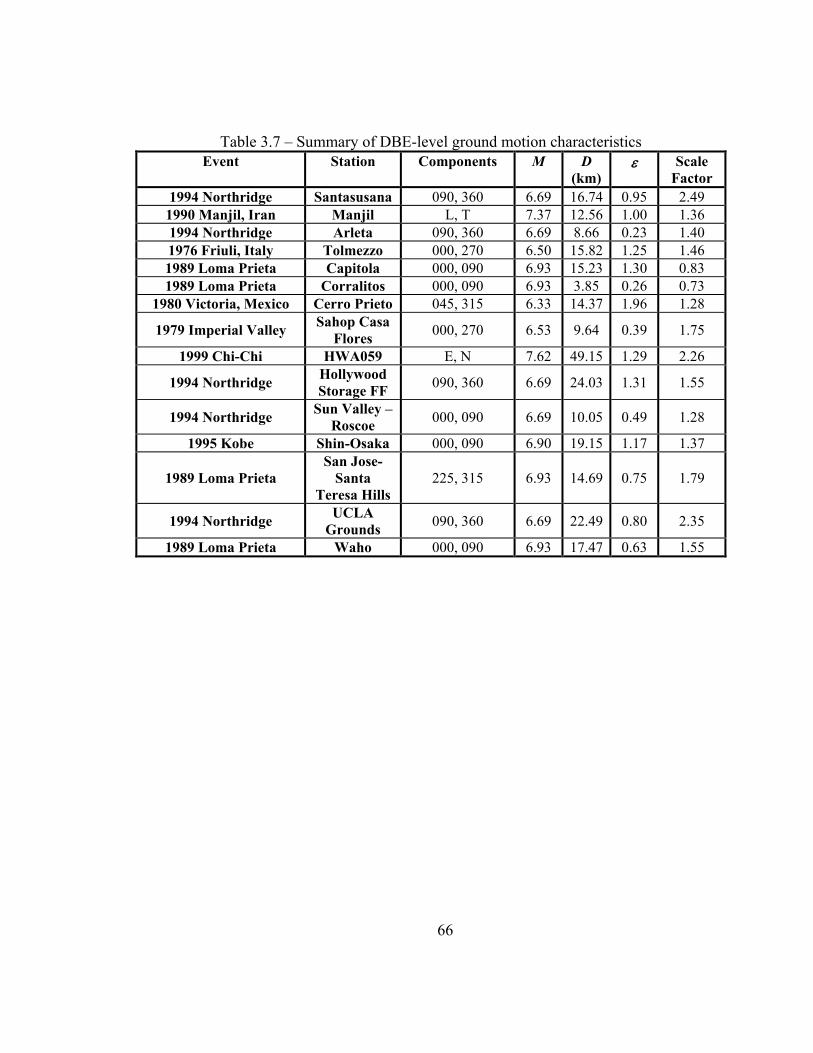
66
Table 3.7 – Summary of DBE-level ground motion characteristics Event Station Components M D
(km) ε Scale
Factor 1994 Northridge Santasusana 090, 360 6.69 16.74 0.95 2.49
1990 Manjil, Iran Manjil L, T 7.37 12.56 1.00 1.36 1994 Northridge Arleta 090, 360 6.69 8.66 0.23 1.40 1976 Friuli, Italy Tolmezzo 000, 270 6.50 15.82 1.25 1.46 1989 Loma Prieta Capitola 000, 090 6.93 15.23 1.30 0.83 1989 Loma Prieta Corralitos 000, 090 6.93 3.85 0.26 0.73
1980 Victoria, Mexico Cerro Prieto 045, 315 6.33 14.37 1.96 1.28
1979 Imperial Valley Sahop Casa Flores 000, 270 6.53 9.64 0.39 1.75
1999 Chi-Chi HWA059 E, N 7.62 49.15 1.29 2.26
1994 Northridge Hollywood Storage FF 090, 360 6.69 24.03 1.31 1.55
1994 Northridge Sun Valley – Roscoe 000, 090 6.69 10.05 0.49 1.28
1995 Kobe Shin-Osaka 000, 090 6.90 19.15 1.17 1.37
1989 Loma Prieta San Jose-
Santa Teresa Hills
225, 315 6.93 14.69 0.75 1.79
1994 Northridge UCLA Grounds 090, 360 6.69 22.49 0.80 2.35
1989 Loma Prieta Waho 000, 090 6.93 17.47 0.63 1.55

67
Table 3.8 – Summary of gap opening and base shear responses to DBE-level ground motions for frame a
Ground Motion
∆gap,L (in)
∆gap,R (in)
∆gap,max (in) Vb,max(kips) vbn
5108-090 2.27 1.83 2.27 1476 4.07 5108-360 1.78 1.57 1.78 1212 3.35 abbar--l 1.11 1.95 1.95 1474 4.07 abbar--t 2.86 3.51 3.51 1475 4.07 arl090 2.54 3.54 3.54 925 2.55 arl360 1.14 1.78 1.78 897 2.48
a-tmz000 1.22 1.19 1.22 829 2.29 a-tmz270 1.77 1.78 1.78 698 1.93 cap000 2.98 2.89 2.98 774 2.14 cap090 1.17 1.15 1.17 707 1.95 cls000 1.45 1.31 1.45 695 1.92 cls090 1.37 1.80 1.80 631 1.74 cpe045 2.89 3.07 3.07 1047 2.89 cpe315 1.10 1.09 1.10 695 1.92
h-shp000 1.26 1.25 1.26 1069 2.95 h-shp270 2.00 1.57 2.00 1312 3.62 hwa059-e 2.02 1.04 2.02 615 1.70 hwa059-n 1.33 1.46 1.46 650 1.79 nr-pel090 1.96 2.04 2.04 662 1.83 nr-pel360 2.45 2.52 2.52 1217 3.36
ro3000 1.08 1.31 1.31 817 2.26 ro3090 2.94 3.57 3.57 979 2.70 shi000 1.92 2.91 2.91 735 2.03 shi090 1.98 2.03 2.03 711 1.96 sjte225 1.30 1.22 1.30 1021 2.82 sjte315 1.93 1.67 1.93 833 2.30 ucl090 2.01 1.09 2.01 1165 3.22 ucl360 2.83 3.25 3.25 1504 4.15
wah000 2.00 2.04 2.04 1173 3.24 wah090 3.08 3.08 3.08 1645 4.54

68
Table 3.9 – Summary of gap opening and base shear responses to DBE-level ground motions for frame b
Ground Motion
∆gap,L (in)
∆gap,R (in)
∆gap,max (in) Vb,max(kips) vbn
5108-090 2.36 2.12 2.36 1150 3.17 5108-360 1.88 1.66 1.88 1297 3.58 abbar--l 1.30 2.47 2.47 1417 3.91 abbar--t 3.29 4.48 4.48 1349 3.72 arl090 2.89 4.55 4.55 1082 2.99 arl360 1.36 2.09 2.09 964 2.66
a-tmz000 1.57 1.49 1.57 828 2.29 a-tmz270 2.28 2.06 2.28 710 1.96 cap000 3.09 2.68 3.09 876 2.42 cap090 1.49 1.61 1.61 600 1.66 cls000 1.95 1.69 1.95 698 1.93 cls090 1.69 2.21 2.21 674 1.86 cpe045 3.41 4.14 4.14 1265 3.49 cpe315 1.41 1.30 1.41 697 1.92
h-shp000 1.65 1.55 1.65 978 2.70 h-shp270 2.72 2.08 2.72 1236 3.41 hwa059-e 2.57 1.23 2.57 540 1.49 hwa059-n 1.86 1.79 1.86 672 1.86 nr-pel090 2.31 2.20 2.31 650 1.79 nr-pel360 2.71 2.82 2.82 1411 3.90
ro3000 1.28 2.23 2.23 773 2.13 ro3090 3.62 4.35 4.35 1052 2.90 shi000 2.20 3.58 3.58 707 1.95 shi090 2.28 2.25 2.28 602 1.66 sjte225 1.73 1.31 1.73 967 2.67 sjte315 2.40 2.06 2.40 867 2.39 ucl090 2.76 1.58 2.76 1443 3.98 ucl360 3.48 3.17 3.48 1727 4.77
wah000 2.28 2.52 2.52 1024 2.83 wah090 3.36 3.56 3.56 1611 4.45
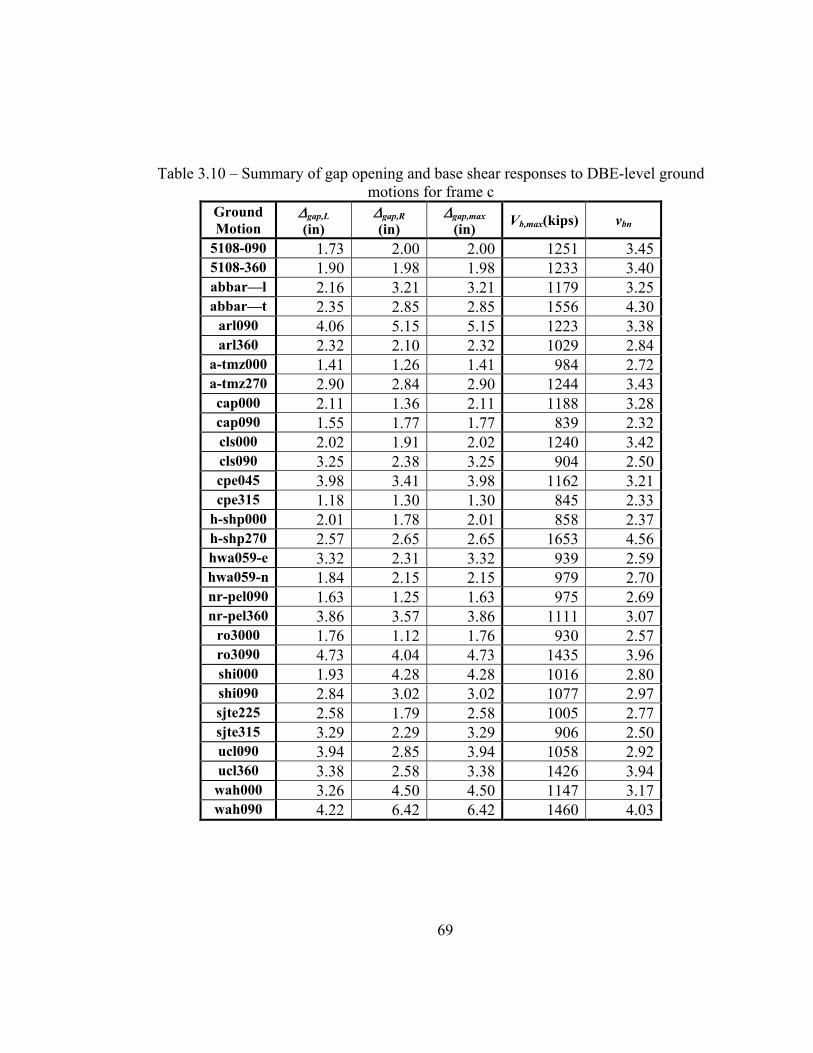
69
Table 3.10 – Summary of gap opening and base shear responses to DBE-level ground
motions for frame c Ground Motion
∆gap,L (in)
∆gap,R (in)
∆gap,max (in) Vb,max(kips) vbn
5108-090 1.73 2.00 2.00 1251 3.45 5108-360 1.90 1.98 1.98 1233 3.40 abbar—l 2.16 3.21 3.21 1179 3.25 abbar—t 2.35 2.85 2.85 1556 4.30
arl090 4.06 5.15 5.15 1223 3.38 arl360 2.32 2.10 2.32 1029 2.84
a-tmz000 1.41 1.26 1.41 984 2.72 a-tmz270 2.90 2.84 2.90 1244 3.43 cap000 2.11 1.36 2.11 1188 3.28 cap090 1.55 1.77 1.77 839 2.32 cls000 2.02 1.91 2.02 1240 3.42 cls090 3.25 2.38 3.25 904 2.50 cpe045 3.98 3.41 3.98 1162 3.21 cpe315 1.18 1.30 1.30 845 2.33
h-shp000 2.01 1.78 2.01 858 2.37 h-shp270 2.57 2.65 2.65 1653 4.56 hwa059-e 3.32 2.31 3.32 939 2.59 hwa059-n 1.84 2.15 2.15 979 2.70 nr-pel090 1.63 1.25 1.63 975 2.69 nr-pel360 3.86 3.57 3.86 1111 3.07
ro3000 1.76 1.12 1.76 930 2.57 ro3090 4.73 4.04 4.73 1435 3.96 shi000 1.93 4.28 4.28 1016 2.80 shi090 2.84 3.02 3.02 1077 2.97 sjte225 2.58 1.79 2.58 1005 2.77 sjte315 3.29 2.29 3.29 906 2.50 ucl090 3.94 2.85 3.94 1058 2.92 ucl360 3.38 2.58 3.38 1426 3.94
wah000 3.26 4.50 4.50 1147 3.17 wah090 4.22 6.42 6.42 1460 4.03

70
Table 3.11 – Mean and standard deviation of gap opening and base shear responses to DBE-level ground motions
∆gap,L (in)
∆gap,R (in)
∆gap,max (in) Vb,max(kips) vbn
Frame a Mean 1.93 2.02 2.14 988 2.73 std. dev. 0.65 0.83 0.76 310 0.86
Frame b Mean 2.31 2.43 2.63 996 2.75 std. dev. 0.71 0.98 0.90 330 0.91
Frame c Mean 2.67 2.67 2.99 1128 3.11 std. dev. 0.96 1.24 1.22 215 0.59

71
Table 3.12 – Summary of drift responses to DBE-level ground motions for frame a Ground Motion
θDBE (% rad)
θs,1 (% rad)
θs,2 (% rad)
θs,3 (% rad)
θs,4 (% rad)
θs,max (% rad)
5108-090 1.06 0.98 1.16 1.13 1.04 1.16 5108-360 0.85 0.91 1.00 0.94 0.89 1.00 abbar--l 0.96 0.64 0.72 0.67 0.66 0.72 abbar--t 1.58 0.87 0.94 0.91 0.85 0.94 arl090 1.58 0.95 1.13 1.08 1.02 1.13 arl360 0.85 1.69 1.70 1.65 1.59 1.70
a-tmz000 0.60 1.60 1.68 1.64 1.53 1.68 a-tmz270 0.84 0.84 0.96 0.92 0.86 0.96 cap000 1.35 1.33 1.37 1.38 1.34 1.38 cap090 0.57 0.57 0.59 0.60 0.55 0.60 cls000 0.71 0.61 0.81 0.80 0.75 0.81 cls090 0.85 0.79 0.89 0.90 0.82 0.90 cpe045 1.40 1.38 1.51 1.48 1.40 1.51 cpe315 0.55 0.57 0.63 0.63 0.57 0.63
h-shp000 0.64 0.73 0.79 0.74 0.73 0.79 h-shp270 0.90 1.11 1.03 1.00 1.05 1.11 hwa059-e 0.94 0.90 0.98 1.00 0.94 1.00 hwa059-n 0.69 0.70 0.74 0.73 0.66 0.74 nr-pel090 0.94 0.96 0.96 0.97 0.92 0.97 nr-pel360 1.17 1.14 1.30 1.25 1.26 1.30
ro3000 0.64 0.64 0.69 0.68 0.65 0.69 ro3090 1.61 1.63 1.65 1.65 1.62 1.65 shi000 1.32 1.29 1.36 1.37 1.30 1.37 shi090 0.94 0.95 0.98 0.97 0.93 0.98 sjte225 0.61 0.69 0.67 0.65 0.68 0.69 sjte315 0.89 0.91 0.91 0.92 0.87 0.92 ucl090 0.92 1.01 1.04 0.96 0.99 1.04 ucl360 1.46 1.55 1.53 1.52 1.49 1.55
wah000 0.97 0.95 1.11 1.05 1.02 1.11 wah090 1.43 1.46 1.54 1.53 1.54 1.54
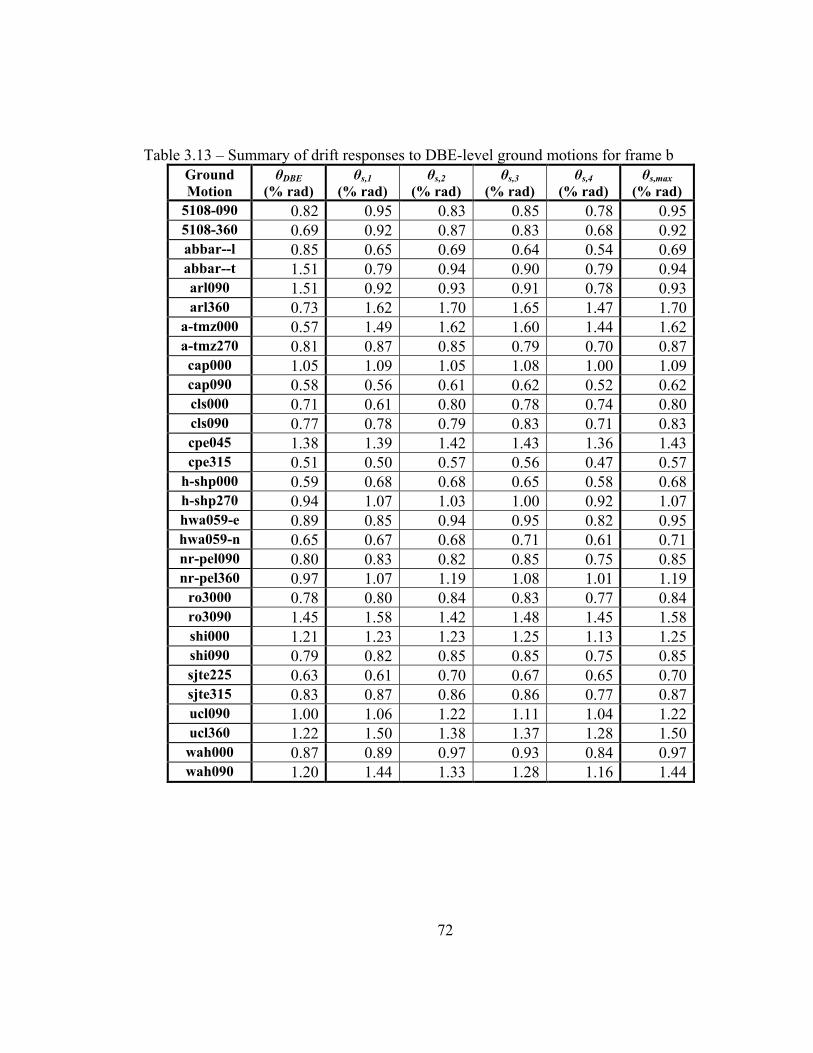
72
Table 3.13 – Summary of drift responses to DBE-level ground motions for frame b Ground Motion
θDBE (% rad)
θs,1 (% rad)
θs,2 (% rad)
θs,3 (% rad)
θs,4 (% rad)
θs,max (% rad)
5108-090 0.82 0.95 0.83 0.85 0.78 0.95 5108-360 0.69 0.92 0.87 0.83 0.68 0.92 abbar--l 0.85 0.65 0.69 0.64 0.54 0.69 abbar--t 1.51 0.79 0.94 0.90 0.79 0.94 arl090 1.51 0.92 0.93 0.91 0.78 0.93 arl360 0.73 1.62 1.70 1.65 1.47 1.70
a-tmz000 0.57 1.49 1.62 1.60 1.44 1.62 a-tmz270 0.81 0.87 0.85 0.79 0.70 0.87 cap000 1.05 1.09 1.05 1.08 1.00 1.09 cap090 0.58 0.56 0.61 0.62 0.52 0.62 cls000 0.71 0.61 0.80 0.78 0.74 0.80 cls090 0.77 0.78 0.79 0.83 0.71 0.83 cpe045 1.38 1.39 1.42 1.43 1.36 1.43 cpe315 0.51 0.50 0.57 0.56 0.47 0.57
h-shp000 0.59 0.68 0.68 0.65 0.58 0.68 h-shp270 0.94 1.07 1.03 1.00 0.92 1.07 hwa059-e 0.89 0.85 0.94 0.95 0.82 0.95 hwa059-n 0.65 0.67 0.68 0.71 0.61 0.71 nr-pel090 0.80 0.83 0.82 0.85 0.75 0.85 nr-pel360 0.97 1.07 1.19 1.08 1.01 1.19
ro3000 0.78 0.80 0.84 0.83 0.77 0.84 ro3090 1.45 1.58 1.42 1.48 1.45 1.58 shi000 1.21 1.23 1.23 1.25 1.13 1.25 shi090 0.79 0.82 0.85 0.85 0.75 0.85 sjte225 0.63 0.61 0.70 0.67 0.65 0.70 sjte315 0.83 0.87 0.86 0.86 0.77 0.87 ucl090 1.00 1.06 1.22 1.11 1.04 1.22 ucl360 1.22 1.50 1.38 1.37 1.28 1.50
wah000 0.87 0.89 0.97 0.93 0.84 0.97 wah090 1.20 1.44 1.33 1.28 1.16 1.44

73
Table 3.14 – Summary of drift responses to DBE-level ground motions for frame c Ground Motion
θDBE (% rad)
θs,1 (% rad)
θs,2 (% rad)
θs,3 (% rad)
θs,4 (% rad)
θs,max (% rad)
5108-090 0.58 0.90 0.66 0.81 0.55 0.90 5108-360 0.61 0.81 0.88 1.08 0.56 1.08 abbar--l 0.88 0.67 0.64 0.78 0.38 0.78 abbar--t 0.79 1.11 1.03 1.15 0.79 1.15 arl090 1.33 1.13 0.92 1.05 0.70 1.13 arl360 0.66 1.03 1.03 1.26 0.68 1.26
a-tmz000 0.45 1.38 1.30 1.45 1.22 1.45 a-tmz270 0.83 0.86 0.67 0.79 0.57 0.86 cap000 0.63 0.90 0.88 1.06 0.56 1.06 cap090 0.53 0.59 0.73 0.81 0.39 0.81 cls000 0.59 1.04 0.74 0.82 0.59 1.04 cls090 0.89 0.87 0.89 1.04 0.82 1.04 cpe045 1.06 1.26 1.16 1.27 0.85 1.27 cpe315 0.41 0.54 0.53 0.60 0.37 0.60
h-shp000 0.58 0.60 0.65 0.73 0.47 0.73 h-shp270 0.75 1.20 1.05 1.30 0.68 1.30 hwa059-e 0.92 0.77 1.03 1.15 0.84 1.15 hwa059-n 0.63 0.81 0.65 0.73 0.55 0.81 nr-pel090 0.48 0.68 0.56 0.60 0.40 0.68 nr-pel360 1.03 1.22 1.06 1.20 0.86 1.22
ro3000 0.53 0.64 0.69 0.75 0.43 0.75 ro3090 1.23 1.34 1.35 1.40 1.06 1.40 shi000 1.14 1.14 1.12 1.28 1.03 1.28 shi090 0.84 0.96 0.83 0.92 0.74 0.96 sjte225 0.73 0.79 0.86 0.95 0.65 0.95 sjte315 0.90 0.83 0.99 1.11 0.76 1.11 ucl090 1.06 1.07 1.18 1.30 1.00 1.30 ucl360 0.94 1.26 1.17 1.39 0.82 1.39
wah000 1.21 1.16 1.32 1.47 1.12 1.47 wah090 1.61 1.67 1.63 1.73 1.44 1.73

74
Table 3.15 – Mean and standard deviation of drift responses to DBE-level ground motions
θDBE
(% rad) θs,1
(% rad) θs,2
(% rad) θs,3
(% rad) θs,4
(% rad) θs,max
(% rad) Frame a Mean 0.99 1.01 1.08 1.06 1.02 1.09
std. dev. 0.33 0.34 0.33 0.33 0.33 0.33 Frame b Mean 0.91 0.97 0.99 0.98 0.88 1.02
std. dev. 0.29 0.32 0.30 0.30 0.29 0.32 Frame c Mean 0.83 0.97 0.94 1.07 0.73 1.09
std. dev. 0.29 0.27 0.27 0.29 0.27 0.27
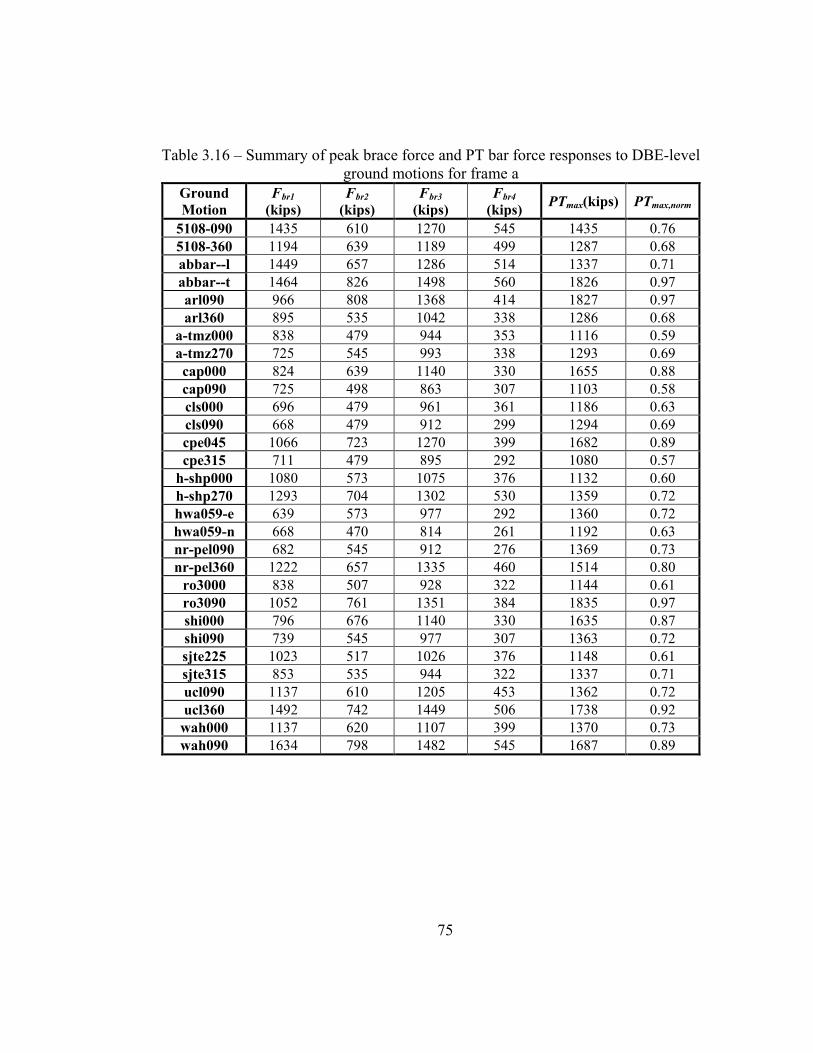
75
Table 3.16 – Summary of peak brace force and PT bar force responses to DBE-level ground motions for frame a
Ground Motion
Fbr1 (kips)
Fbr2 (kips)
Fbr3 (kips)
Fbr4 (kips) PTmax(kips) PTmax,norm
5108-090 1435 610 1270 545 1435 0.76 5108-360 1194 639 1189 499 1287 0.68 abbar--l 1449 657 1286 514 1337 0.71 abbar--t 1464 826 1498 560 1826 0.97 arl090 966 808 1368 414 1827 0.97 arl360 895 535 1042 338 1286 0.68
a-tmz000 838 479 944 353 1116 0.59 a-tmz270 725 545 993 338 1293 0.69 cap000 824 639 1140 330 1655 0.88 cap090 725 498 863 307 1103 0.58 cls000 696 479 961 361 1186 0.63 cls090 668 479 912 299 1294 0.69 cpe045 1066 723 1270 399 1682 0.89 cpe315 711 479 895 292 1080 0.57
h-shp000 1080 573 1075 376 1132 0.60 h-shp270 1293 704 1302 530 1359 0.72 hwa059-e 639 573 977 292 1360 0.72 hwa059-n 668 470 814 261 1192 0.63 nr-pel090 682 545 912 276 1369 0.73 nr-pel360 1222 657 1335 460 1514 0.80
ro3000 838 507 928 322 1144 0.61 ro3090 1052 761 1351 384 1835 0.97 shi000 796 676 1140 330 1635 0.87 shi090 739 545 977 307 1363 0.72 sjte225 1023 517 1026 376 1148 0.61 sjte315 853 535 944 322 1337 0.71 ucl090 1137 610 1205 453 1362 0.72 ucl360 1492 742 1449 506 1738 0.92
wah000 1137 620 1107 399 1370 0.73 wah090 1634 798 1482 545 1687 0.89

76
Table 3.17 – Summary of peak brace force and PT bar force responses to DBE-level ground motions for frame b
Ground Motion
Fbr1 (kips)
Fbr2 (kips)
Fbr3 (kips)
Fbr4 (kips) PTmax(kips) PTmax,norm
5108-090 986 563 877 313 875 0.77 5108-360 1089 465 1021 346 785 0.69 abbar--l 1222 618 973 326 894 0.79 abbar--t 1161 695 1225 385 1154 1.01 arl090 935 653 1093 339 1155 1.02 arl360 811 507 853 294 825 0.73
a-tmz000 709 472 721 267 730 0.64 a-tmz270 616 479 829 287 855 0.75 cap000 750 528 829 267 1006 0.88 cap090 514 382 600 222 738 0.65 cls000 616 465 769 326 795 0.70 cls090 575 410 721 241 847 0.74 cpe045 1078 632 997 333 1146 1.01 cpe315 596 382 636 222 702 0.62
h-shp000 822 465 685 248 745 0.66 h-shp270 1058 604 1057 346 938 0.82 hwa059-e 452 452 781 241 913 0.80 hwa059-n 575 410 636 235 784 0.69 nr-pel090 555 465 721 254 867 0.76 nr-pel360 1212 681 1033 365 957 0.84
ro3000 668 452 757 267 850 0.75 ro3090 924 681 1021 378 1150 1.01 shi000 637 597 913 300 1097 0.96 shi090 514 452 721 254 859 0.76 sjte225 822 438 709 280 759 0.67 sjte315 740 500 745 254 885 0.78 ucl090 1253 764 1141 398 943 0.83 ucl360 1458 716 1261 444 1079 0.95
wah000 873 479 889 300 902 0.79 wah090 1397 813 1261 437 1094 0.96

77
Table 3.18 – Summary of peak brace force and PT bar force responses to DBE-level ground motions for frame c
Ground Motion
Fbr1 (kips)
Fbr2 (kips)
Fbr3 (kips)
Fbr4 (kips) PTmax(kips) PTmax,norm
5108-090 941 539 681 250 621 0.69 5108-360 923 566 864 272 614 0.68 abbar—l 888 600 791 295 786 0.87 abbar—t 1169 675 949 295 740 0.82
arl090 923 620 912 357 920 1.02 arl360 765 532 681 267 664 0.74
a-tmz000 730 470 706 233 544 0.60 a-tmz270 914 634 925 346 740 0.82 cap000 888 491 815 267 635 0.71 cap090 624 430 693 238 586 0.65 cls000 923 566 742 289 624 0.69 cls090 668 498 803 318 790 0.88 cpe045 870 566 900 312 896 1.00 cpe315 624 436 584 210 526 0.58
h-shp000 633 443 633 233 625 0.69 h-shp270 1239 730 949 301 706 0.78 hwa059-e 694 511 876 335 796 0.88 hwa059-n 730 511 657 255 641 0.71 nr-pel090 721 484 584 227 572 0.64 nr-pel360 800 607 876 318 874 0.97
ro3000 686 470 681 255 587 0.65 ro3090 1072 730 1022 391 913 1.01 shi000 747 511 900 352 904 1.00 shi090 800 539 766 295 758 0.84 sjte225 747 525 791 295 697 0.77 sjte315 668 511 839 312 794 0.88 ucl090 765 580 937 363 883 0.98 ucl360 1072 668 1046 352 820 0.91
wah000 844 641 1022 386 908 1.01 wah090 1099 655 1010 346 944 1.05
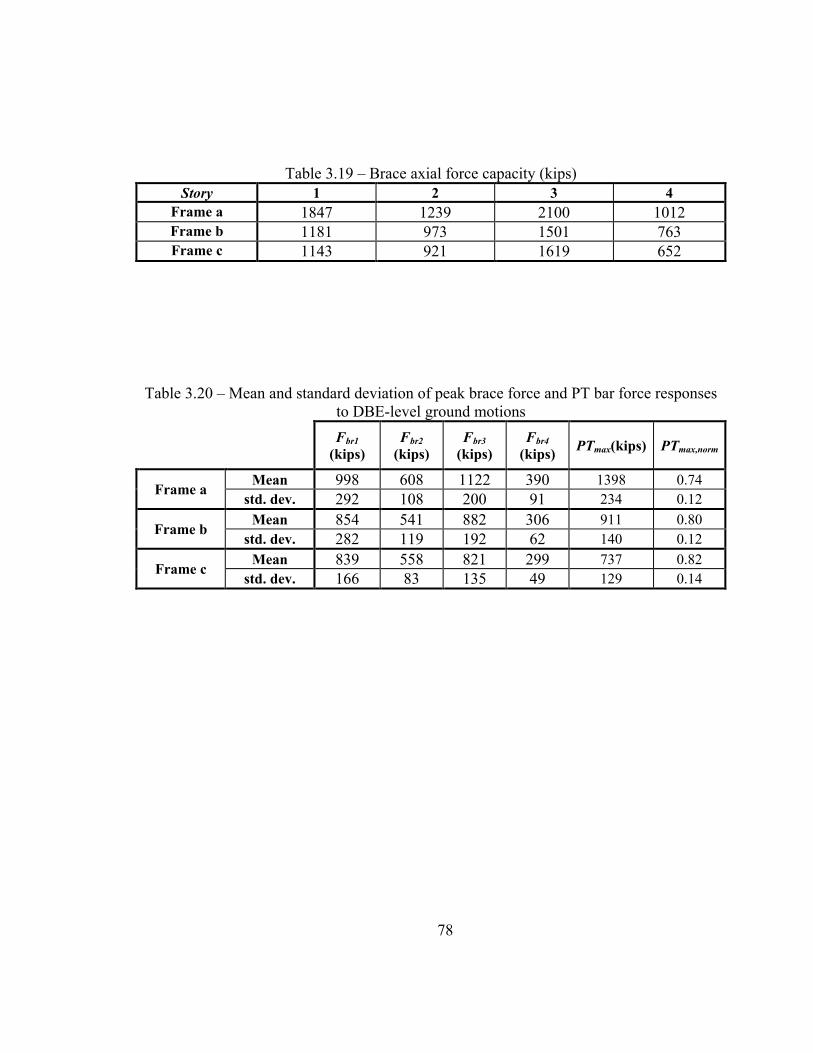
78
Table 3.19 – Brace axial force capacity (kips) Story 1 2 3 4
Frame a 1847 1239 2100 1012 Frame b 1181 973 1501 763 Frame c 1143 921 1619 652
Table 3.20 – Mean and standard deviation of peak brace force and PT bar force responses to DBE-level ground motions
Fbr1 (kips)
Fbr2 (kips)
Fbr3 (kips)
Fbr4 (kips) PTmax(kips) PTmax,norm
Frame a Mean 998 608 1122 390 1398 0.74 std. dev. 292 108 200 91 234 0.12
Frame b Mean 854 541 882 306 911 0.80
std. dev. 282 119 192 62 140 0.12
Frame c Mean 839 558 821 299 737 0.82 std. dev. 166 83 135 49 129 0.14

79
Figure 3.1 – Prototype buildings used for the parametric study: (a) typical elevation; (b) floor plan for frame a; (c) floor plan for frame b; (d) floor plan for frame c
Ground level
h4 = 12.5ft
h3 = 12.5ft
h2 = 12.5ft
h1 = 15.0ft
SC-CBF
Gravity Column
Adjacent Gravity Column
Tributary area for one SC-CBF
(b) (a) 8 @ 22.5ft = 180ft
8 @
22.
5ft =
180
ft
6 @
30f
t = 1
80ft
6 @ 30ft = 180ft
(c) 180ft
2 @ 40ft 2 @ 40ft
(d)
Frame b Frame c
180f
t
Frame a
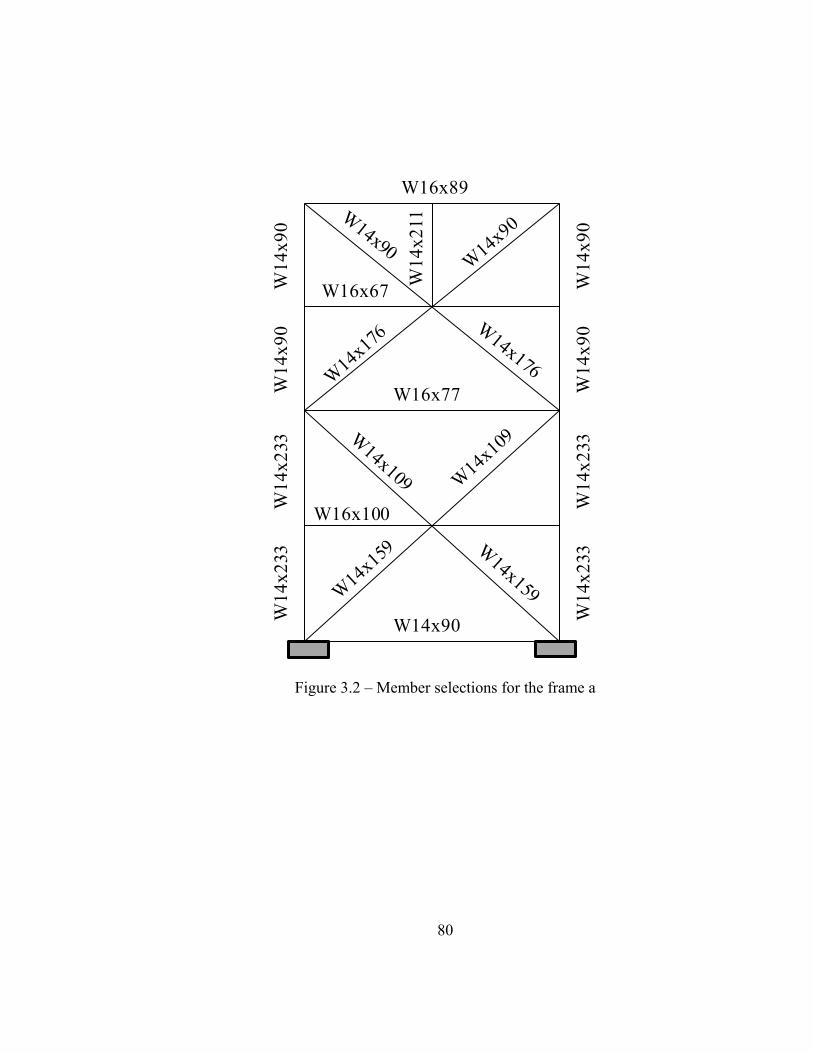
80
Figure 3.2 – Member selections for the frame a
W16x100
W16x77
W16x67
W16x89
W14x90
W14
x211
W14
x233
W14
x233
W14
x233
W14
x233
W14
x90
W14
x90
W14
x90
W14
x90

81
Figure 3.3 – Member selection for the frame b
W16x100
W16x67
W16x67
W16x67
W14x74
W14
x120
W14
x159
W14
x159
W14
x159
W14
x159
W14
x68
W14
x68
W14
x68
W14
x68

82
Figure 3.4 – Member selections for the frame c
W16x100
W16x67
W16x67
W16x67
W14x82
W14
x99
W14
x145
W14
x145
W14
x145
W14
x145
W14
x68
W14
x68
W14
x68
W14
x68

83
Figure 3.5 – Monotonic pushover results: (a) pre-decompression response; (b) full
range of response
0
3000
6000
9000
12000
15000
18000
0.00 0.04 0.08 0.12 0.16 0.20
Ove
rtur
ning
Mom
ent (
Kip
-ft)
Roof Drift (%)
Frame b
Frame a
Frame c
(a)
0
10000
20000
30000
40000
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Ove
rtur
ning
Mom
ent (
Kip
-ft)
Roof Drift (%)
Frame b
Frame a
Frame c
(b)

84
Figure 3.6 - Cyclic pushover results: up to 1% roof drift
0
5000
10000
15000
20000
25000
30000
35000
0.0 0.2 0.4 0.6 0.8 1.0
Ove
rtur
ning
Mom
ent (
kip-
ft)
Roof Drift (%)
Frame c
Frame b
Frame a

85
Figure 3.7 – DBE-level peak roof drift response for all three frames
0.0
0.3
0.6
0.9
1.2
1.5
1.8Pe
ak R
oof D
rift
(%)
Frame a Frame c Frame b
mean (typ.)
arl360

86
Figure 3.8 – Roof drift response to arl360 ground motion for frame a
Figure 3.9 – Roof drift response to arl360 ground motion for frame b
0 5 10 15 20 25 30 35 40 45-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time (s)
Roof
Drif
t (%
rad)
-0.85%
0 5 10 15 20 25 30 35 40 45-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time (s)
Roof
Drif
t (%
rad)
-0.73%

87
Figure 3.10 – Roof drift response to arl360 ground motion for frame c
Figure 3.11 – PT bar force response to arl360 ground motion for frame a
0 5 10 15 20 25 30 35 40 45-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time (s)
Roof
Drif
t (%
rad)
0.66%
0 5 10 15 20 25 30 35 40 45600
800
1000
1200
1400
1600
1800
2000
Time (s)
PT F
orce
Res
pons
e(ki
p)
PT Bar Yield
1286 kips
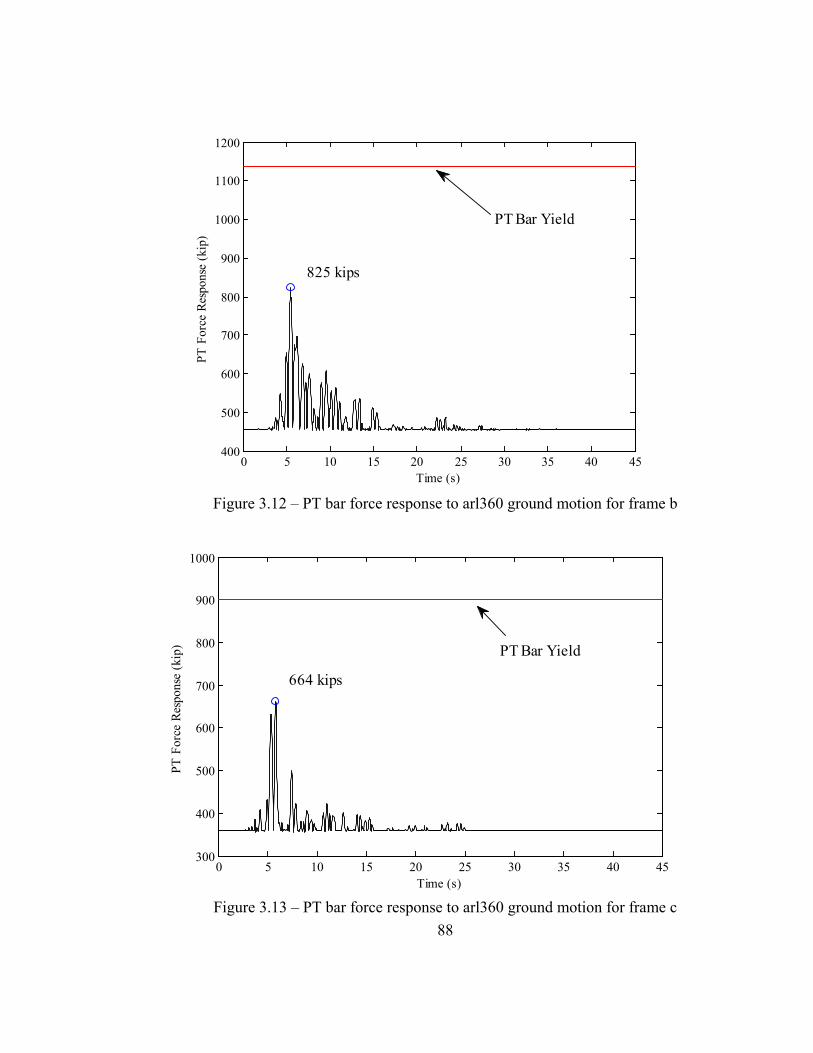
88
Figure 3.12 – PT bar force response to arl360 ground motion for frame b
Figure 3.13 – PT bar force response to arl360 ground motion for frame c
0 5 10 15 20 25 30 35 40 45400
500
600
700
800
900
1000
1100
1200
Time (s)
PT F
orce
Res
pons
e (k
ip)
825 kips
PT Bar Yield
0 5 10 15 20 25 30 35 40 45300
400
500
600
700
800
900
1000
Time (s)
PT F
orce
Res
pons
e (k
ip) PT Bar Yield
664 kips

89
Figure 3.14 – PT bar force and SC-CBF column base gap opening response to arl360 ground motion for frame a
Figure 3.15 – PT bar force and SC-CBF column base gap opening response to arl360
ground motion for frame b
0 5 10 15 20 25 30 35 40 45400
600
800
1000
1200
1400
1600
PT
Forc
e (k
ip)
Time (s)
0 5 10 15 20 25 30 35 40 450
0.5
1
1.5
2
2.5
3
Col
umn
Gap
Ope
ning
(in)
PT ForceLeft Column Gap Opening
0 5 10 15 20 25 30 35 40 450
200
400
600
800
1000
1200
PT
Forc
e (k
ip)
Time (s)
0 5 10 15 20 25 30 35 40 450
0.5
1
1.5
2
2.5
3
Col
umn
Gap
Ope
ning
(in)
PT ForceLeft Column Gap Opening
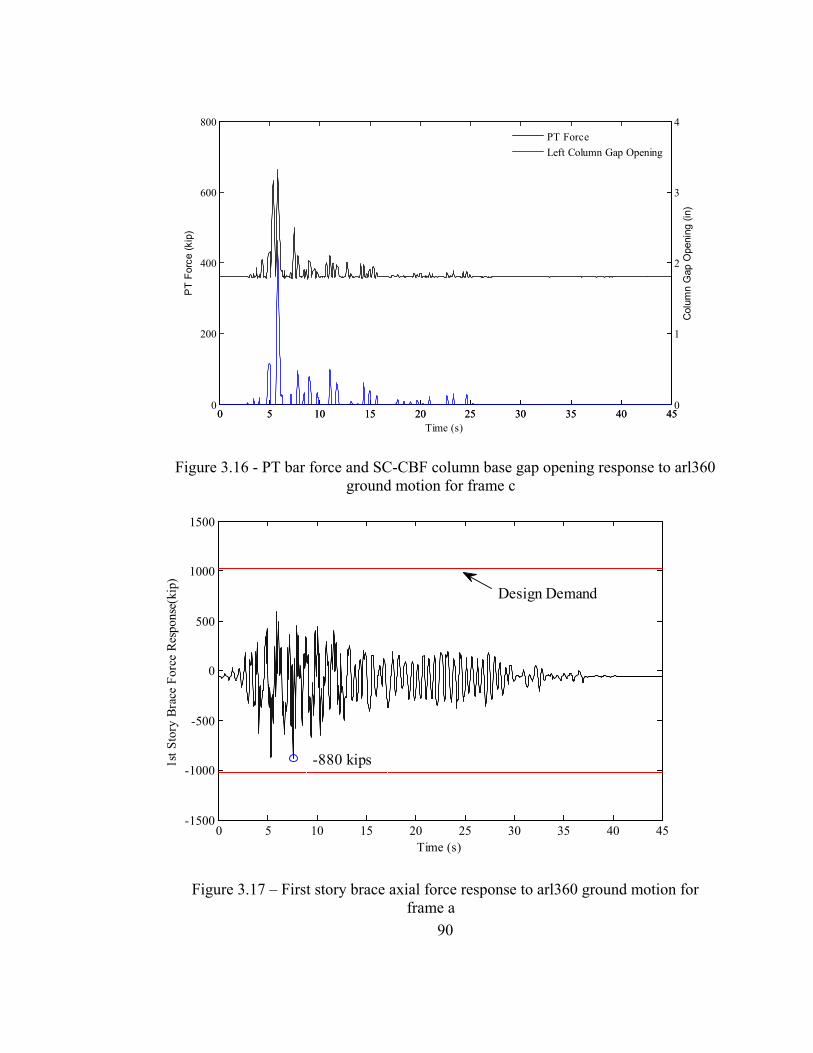
90
Figure 3.16 - PT bar force and SC-CBF column base gap opening response to arl360 ground motion for frame c
Figure 3.17 – First story brace axial force response to arl360 ground motion for frame a
0 5 10 15 20 25 30 35 40 450
200
400
600
800
PT
Forc
e (k
ip)
Time (s)
0 5 10 15 20 25 30 35 40 450
1
2
3
4
Col
umn
Gap
Ope
ning
(in)
PT ForceLeft Column Gap Opening
0 5 10 15 20 25 30 35 40 45-1500
-1000
-500
0
500
1000
1500
Time (s)
1st S
tory
Bra
ce F
orce
Res
pons
e(ki
p)
-880 kips
Design Demand

91
Figure 3.18 - First story brace axial force response to arl360 ground motion for frame
b
Figure 3.19 - First story brace axial force response to arl360 ground motion for frame
c
0 5 10 15 20 25 30 35 40 45-1500
-1000
-500
0
500
1000
1500
Time (s)
1st S
tory
Bra
ce F
orce
Res
pons
e (k
ip)
Design Demand
-812 kips
0 5 10 15 20 25 30 35 40 45-1000
-800
-600
-400
-200
0
200
400
600
800
1000
Time (s)
1st S
tory
Bra
ce F
orce
Res
pons
e (k
ip)
-765 kips
Design Demand

92
Figure 3.20 – Overturning moment roof drift response to arl360 ground motion for frame a
Figure 3.21 – Overturning moment roof drift response to arl360 ground motion for frame b
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2x 10
4
Ove
rturn
ing
Mom
ent (
kip-
ft)
Roof Drift (% rad)
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2x 10
4
Ove
rturn
ing
Mom
ent (
kip-
ft)
Roof Drift (% rad)

93
Figure 3.22 - Overturning moment roof drift response to arl360 ground motion for
frame c
Figure 3.23 – Overturning moment column base gap opening response to arl360
ground motion for frame a
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-3
-2
-1
0
1
2
3
4x 10
4
Ove
rturn
ing
Mom
ent (
kip-
ft)
Roof Drift (% rad)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
-2
-1.5
-1
-0.5
0
0.5
1
1.5
x 104
Column Gap Opening (in)
Ove
rturn
ing
Mom
ent (
kip-
ft)
Left Column Gap OpeningRight Column Gap Opening
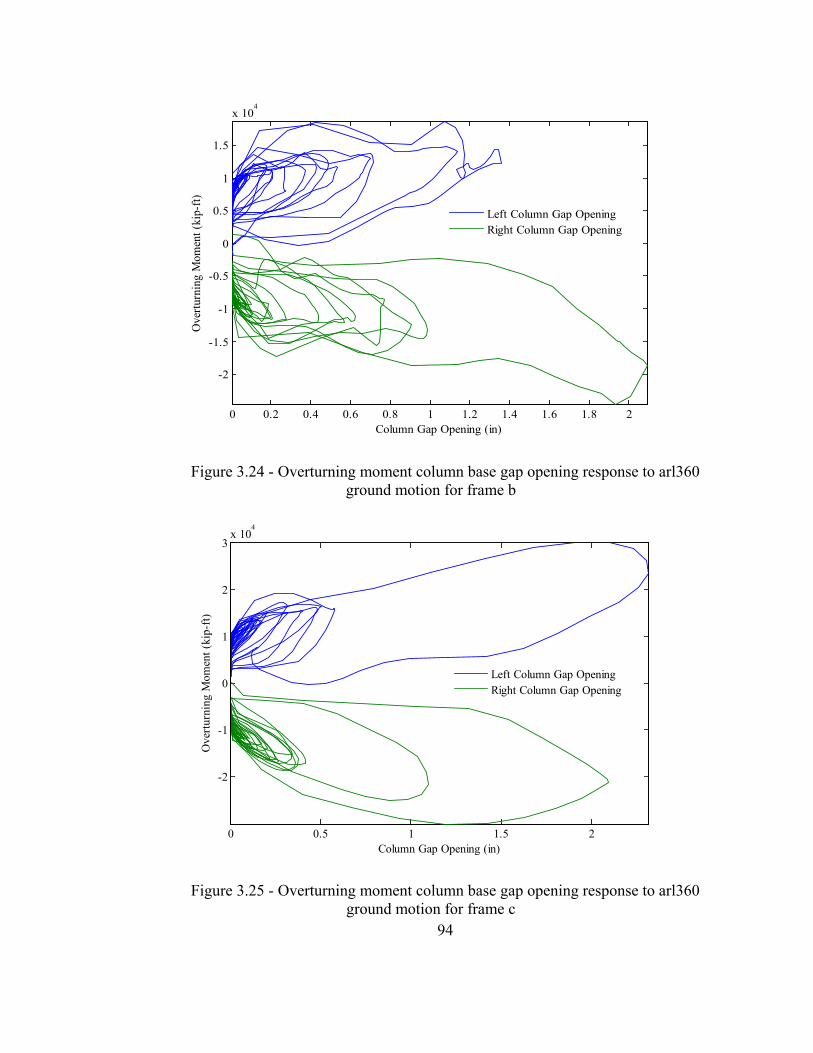
94
Figure 3.24 - Overturning moment column base gap opening response to arl360 ground motion for frame b
Figure 3.25 - Overturning moment column base gap opening response to arl360 ground motion for frame c
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
x 104
Column Gap Opening (in)
Ove
rturn
ing
Mom
ent (
kip-
ft)
Left Column Gap OpeningRight Column Gap Opening
0 0.5 1 1.5 2
-2
-1
0
1
2
3x 10
4
Column Gap Opening (in)
Ove
rturn
ing
Mom
ent (
kip-
ft)
Left Column Gap OpeningRight Column Gap Opening
95
CHAPTER IV
HIGHER MODE EFFECTS
4.1 Overview
The rocking response of SC-CBF systems tends to cause higher mode response
exceeding that of an equivalent fixed-base structure, which results in a significant
increase in member force demands (Roke et al. 2009, Wiebe and Christopoulos 2009).
This amplification of higher mode response introduces additional uncertainty in the
dynamic response. It is therefore desirable to determine which frame configuration
minimizes the higher mode effects.
To compare modal response for the various SC-CBFs, the modal demands in must be
quantified and normalized by standard measures. In this chapter, several quantification
measures (both intensity-based measures and conventional peak-based measures) are
proposed for quantifying modal responses. The effectiveness of these measures for
quantifying modal responses of SC-CBFs is then studied by applying them to several
prototype frames with varying frame geometries and friction coefficients.
96
4.2 Higher Mode Contributions in SC-CBF Design
Several conservative measures had been taken to account for large higher mode
effects in the development of the SC-CBF design procedure (Roke et al. 2010), which
modifies the conventional response spectrum analysis (RSA) design method. For design
demand calculation, a design pseudo-acceleration spectrum based on the modal
properties of the structure is used to determine the peak modal responses, similar to
conventional RSA. However, the design pseudo-acceleration values are amplified by a
safety factor, γn, as described in Section 2.6.2.2. For higher modes, γn was set equal to
2.0 to account for the significant uncertainty in the higher mode response. Furthermore,
conservative values of modal correlation coefficients (the off-diagonal correlation
coefficients, ρij, were set equal to 0.25) are used while combining the peak modal
responses by complete quadratic combination (CQC) method (as described in Section
2.6.2.2).
4.3 Prototypes for Higher Mode Quantification Study
To demonstrate and compare the modal response of SC-CBF systems, two sets of
prototype SC-CBFs are used: the prototype SC-CBFs described in Section 3.2, and an
additional set of prototypes that were initially studied by Jeffers (2012). The prototype
SC-CBFs described in Section 3.2 were designed using frame geometries a, b, and c and
have coefficients of friction equal to 0.45 at the lateral load bearings; therefore, they will
be referred to as frames a45, b45, and c45, respectively. The prototype SC-CBFs studied
by Jeffers (2012) were designed using frame geometry b and have coefficients of friction

97
equal to 0.30, 0.45, and 0.60 at the lateral load bearings; therefore, these frames will be
referred to as frames b30, b45, and b60. Note that frame b45 was designed once and used
in both studies. Each of the five prototypes was subjected to the DBE-level ground
motions described in Section 3.6.1. The nonlinear dynamic analysis results were then
used to study the modal responses.
4.4 Modal Analysis
Mode shapes for the five prototype SC-CBFs were determined using eigen value
analyses in OpenSees. Tables 4.1 and 4.2 show the modal frequencies and natural periods
of the prototype SC-CBFs. Figures 4.1 and 4.2 show the mode shapes of the prototype
SC-CBFs. Since the masses of the prototype structures are identical, any difference in
modal properties (e.g., mode shapes and frequencies) among the prototype SC-CBFs will
be a function of frame stiffness.
The change in frame geometry between frames a45, b45, and c45 significantly
affects the frame stiffness, effecting changes in the mode shapes (as shown in Figure 4.1)
and natural frequencies (as shown in Table 4.1). The frames with larger frame width
(frame c) are comparatively stiffer than narrower frames (e.g., frame a).
The change in coefficient of friction between frames b30, b45, and b60 do not
significantly affect the frame stiffness. Figure 4.2 shows the first three modes for
prototype SC-CBFs b30, b45, and b60. Although these frames are designed separately
and have member sections with different sizes, the mode shapes are nearly identical.
Since the frame geometries are identical for three frames, the slight differences in frame
98
member sizes had a negligible effect on the stiffness of the frames. Table 4.2 also shows
that the differences in the modal frequencies are negligible for frames b45 and b60.
Frame b30 has slightly higher frequencies than frames b45 and b60, though the
differences are not as significant as they were for frames a45, b45, and c45.
Two first mode displaced shapes are shown in Figures 4.1(a) and 4.2(a): the linear
first mode shape and the rocking displaced shape. The rocking displaced shape is
determined based on the assumption that there will be rigid body rotation about the base
and the floor level displacements will be proportional to the floor heights (Roke et al.
2010). Figures 4.1(a) and 4.2(a) show that the rocking displaced shape and the first mode
shapes of the frames are not identical; therefore, the rocking is not entirely a first mode
response – higher modes contribute to (and are excited by) the rocking response as well.
4.5 Modal Decomposition
Modal decomposition is used to determine modal responses from the total dynamic
response results obtained from analytical simulations. The response quantities to be
decomposed in this study can broadly be classified into two categories. The first category
comprises of the force quantities (e.g., base shear, overturning moment, and member
forces). The modal responses for these quantities are determined by modal decomposition
of the restoring force vector (Roke et al. 2009) to determine the modal effective pseudo
acceleration, αn. The second category of responses includes displacement quantities (e.g.,
roof drift and story drift). A new quantity, effective peak displacement, δn (which is

99
similar to αn) has been derived to decompose the displacement quantities. The derivation
and definition of these pseudo response quantities are discussed in detail in this section.
4.5.1 Effective Pseudo Acceleration
For linear response, the restoring force vector in the nth mode, {fr,n(t)}, can be
expressed as the modal mass distribution,{sn}, multiplied by the modal pseudo-
acceleration, An(t) (Chopra 2007):
{ } [ ] { } )()(}{)(, tAmtAstf nnnnnnr ⋅⋅⋅Γ=⋅= φ (4.1)
Since the rocking response of SC-CBFs is nonlinear, the conventional modal pseudo-
acceleration, An(t)is replaced by a similar quantity that accounts for this nonlinearity
(Roke et al 2009). This quantity, αn(t), is called the “effective” pseudo-acceleration for
the nth mode. Equation 4.1 can then be rewritten for nonlinear response as follows:
{ } )(}{)(, tstf nnnr α⋅= (4.2)
To determine αn(t), the total restoring force vector, {fr(t)} is written as a summation
of the modal restoring force vectors:
( ){ } ( ){ } [ ] { }∑∑==
⋅⋅⋅Γ==N
nnnn
N
nnrr tmtftf
11, )(αφ (4.3)
Where Γn is the modal participation factor, [m] is the mass matrix, {ϕn} is the nth
mode shape.

100
Due to modal orthogonality, pre-multiplying each side of Equation 4.3 by { nφ }T
gives the effective pseudo acceleration:
( ) { } ( ){ }nn
rT
nn M
tft
⋅Γ=
φα (4.4)
where Mn is the modal mass.
The effective pseudo-acceleration values are then used to determine the modal
restoring force vectors (Equation 4.2). Time history results of these modal restoring
forces are used to determine the modal time history results of force quantities (e.g., base
shear and base overturning moment).
4.5.2 Effective Peak Displacement
As effective pseudo-acceleration is derived from static restoring force vector,
effective peak displacement is determined from the floor displacement vector. For linear
response, the modal floor displacement vectors can be expressed in terms of modal peak
displacement as follows (Chopra 2007):
{ } )(}{)( tDtu nnnn ⋅⋅Γ= φ (4.5)
Equation 4.5 is applicable only to linear response; for nonlinear response, the term
Dn(t) will be replaced by δn(t), the effective peak displacement:
{ } )(}{)( ttu nnnn δφ ⋅⋅Γ= (4.6)

101
The total floor displacement vector, {u(t)}, may be written as the sum of the modal
displacement vectors:
( ){ } ( ){ } { }∑∑==
⋅⋅Γ==N
nnnn
N
nn ttutu
11)(δφ (4.7)
Pre-multiplying each side of the equation 4.3 by { nφ }T.[m] and then applying modal
mass orthogonality, the effective peak displacement can be determined:
( ) { } [ ] ( ){ }nn
Tn
n Mtum
t⋅Γ
⋅⋅=
φδ (4.8)
The time history values of δn(t) are put into Equation 4.6 to calculate the modal floor
displacements, which are then used to determine time history responses of modal
displacement quantities (e.g., roof drift and story drift).
4.6 Modal Decomposition Results
Time history results from OpenSees for the prototype SC-CBFs are decomposed into
modal responses as described in Section 4.5. First, the peak effective pseudo-acceleration
responses are determined and compared against the corresponding design values. The
modal values of quantities such as base shear, overturning moment, and roof drift are
then determined to compare the modal responses against the total responses. Time history
records of modal responses are presented against the corresponding total responses to
demonstrate the higher mode effects on different response quantities.

102
4.6.1 Peak Effective Pseudo-Acceleration Response
Figure 4.3 shows the distribution of peak αn values of the first three modes for the
suite of DBE-level ground motions frame b45. This distribution is typical of the modal
response of the prototype frames. The peak values of effective pseudo-acceleration are
compared against the design spectral acceleration (SAn) and factored spectral acceleration
(γnSAn) values derived from the design response spectrum (as described in Section
2.6.1.1). Figure 4.3 shows that the higher mode responses have very high dispersion
compared to the first mode responses; therefore, a higher value of γn was chosen for the
higher modes (2.0) than the value of γ1 for the first mode (1.15).
4.6.2 Modal Responses
Since ground motion arl360 was used previously for presentation of dynamic
analysis results, the same ground motion record will be used for demonstration of the
modal responses. Figures 4.4, 4.5, and 4.6 show the time history records of the modal
responses (base shear, overturning moment, and roof drift, respectively) compared
against the corresponding total responses for frame b45. Figure 4.4 suggests that the
higher modes contribute significantly to the base shear response. This is only a four-story
structure, so the second mode is the only higher mode that contributes significantly to the
base shear response; however, for taller buildings, the contributions from the third and
fourth modes are expected to increase.
Figures 4.5 and 4.6 show the overturning moment and roof drift responses,
respectively. These figures indicate that the roof drift and overturning moment responses

103
are dominated by the first mode response. The first mode dominance in the roof drift and
overturning moment responses are similar for all of the prototype frames; however, the
degree of the higher mode contribution varies.
4.7 Quantification of Higher Mode Responses
The modal response demonstrated in Section 4.6 shows that higher modes
significantly contribute to SC-CBF dynamic response, especially for base shear. The
modal responses must be quantified using normalized quantification measures so that the
higher mode effects can be compared for different prototype SC-CBFs. Three such
quantification measures are proposed in this study to quantify higher mode effects. They
are compared with the conventional measure, modal peak to total peak ratio. This section
describes all four of the quantification measures (QMs) considered in this study.
4.7.1 Modal Peak to Total Peak Ratio
The first quantification measure discussed in this study is the modal peak to total
peak ratio. For convenience, this quantification parameter will be referred to as QM0.
QM0 is expressed as the ratio of the absolute modal peak response to the absolute total
peak response. Figure 4.7 shows schematic time history plots for total response, rtot(t),
and nth mode response, rn(t), indicating the peak values rtot,max and rn,max, respectively.
QM0 for the nth mode can be expressed as follows:
max
max0 )(
)(trtr
QMtot
nn = (4.9)
104
QM0 has been the most commonly used measure for quantifying modal response
contributions (Chopra 2007). However, due to the uncertainties associated with ground
motion characteristics and dynamic responses, the times at which the modal peaks occur
may not be the same time at which the total peak occurs. Therefore, this ratio may fail to
capture the “true” modal contributions.
4.7.2 Modal Contribution Ratio at Total Peak Response
QM0 is a pre-existing quantification measure. The first proposed quantification
measure, QM1, is the ratio of the modal response at the time of peak total response to the
peak total response (as shown in Figure 4.7, at time t = tm). QM1 for the nth mode will be
expressed as:
( )( )
m
m
tttot
ttnn tr
trQM
=
==)(
)(1 (4.10)
Since QM1 considers the magnitude and sign of the response, a negative result would
imply there is negative correlation between the modal response and the total response.
This is an advantage of QM1 over QM0, since it shows the true modal correlations at a
certain instance of time. However, there may be still some limitations with this parameter
since it only considers a single instant rather than considering the response throughout the
ground motion duration.
105
4.7.3 Normalized Modal Absolute Area Intensity
The second proposed quantification measure, QM2, is developed by adopting an
intensity-based approach that considers the intensity of the response throughout the
ground motion rather than focusing on one single instant. This measure is called the
normalized modal absolute area intensity (NMAAI). To calculate this parameter for a
given response, first the absolute area (the absolute value of the area under the response
curve) of the modal time history response over the entire ground motion duration (td)
must be determined; this value is then divided by the absolute area of the total time
history response over the ground motion duration. These modal ratios are then
normalized such that the sum of all modal contributions equal to 1.0. For a structure with
N modes, QM2 for the nth mode can be expressed as:
∑ ∫∫
∫∫
=
⋅⋅
⋅⋅
= N
i ttot
ti
ttot
tn
n
dd
dd
dttrdttr
dttrdttrQM
1
2
)()(
)()(
(4.11)
4.7.4 Modified Normalized Modal Absolute Area Intensity
The third and final proposed quantification measure, QM3, is the modified NMAAI.
In contrast to QM2, which considers the absolute area intensity over the entire duration of
the ground motion, QM3 considers the absolute area intensity over half cycle of response
that includes the total peak response. As shown schematically in Figure 4.7, it starts at
time t=t1, when the response is zero before the total peak occurs, and finishes at time t =
t2, when the response is zero following the total peak.

106
The calculation procedure of QM3 is similar to that for QM2; the only difference is in
the range over which the area is integrated. The ratio of the area intensity of the modal
response to the total time response for duration t= t1 to t= t2 is first determined. These
modal ratios are then normalized such that the sum of all modal contributions equal to
1.0. For a structure with N modes, QM3 for the nth mode can be expressed as:
∑ ∫∫
∫∫
=
⋅⋅
⋅⋅
=N
i
t
ttot
t
ti
t
ttot
t
tn
n
dttrdttr
dttrdttrQM
1
3 2
1
2
1
2
1
2
1
)()(
)()(
(4.12)
4.8 Comparison of Quantification Measures
The primary purpose of the introduction of these QMs is to compare the higher mode
contributions of different SC-CBF systems. The most effective measure would therefore
be the one which yields results that are comparable for different frames. The most
effective quantification measure is selected based on two criteria: 1) the sum of the modal
means must be equal to 1; and 2) the coefficient of variation must be small. If the sum of
the modal means is 1, the QM values for each mode will represent the percentage of
modal contribution to the total response. QM2 and QM3are normalized such that the sum
of the modal means is 1. Additionally, it is desirable to have a quantification measure
which produces results with low dispersion, as measured by the coefficient of variation
(COV).
The modal response data for all five prototype SC-CBFs have been used to extract
results as calculated by each of the four QMs. As discussed in Section 4.6.2, the base

107
shear responses have the most significant contributions from higher modes among the
studied response quantities; therefore, the response data for base shear have been used to
study the effectiveness of the proposed quantification measures. Since each frame is
subjected to 30 ground motion records, there will be 30 modal QM responses for each
quantification measure. Modal means and coefficients of variation have been determined
for each measure from these records.
Tables 4.3 and 4.4 show the results of the quantification measures for base shear
response. The modal mean values, the sum of the modal means, and the coefficients of
variation for all four quantification measures have been presented for all five prototype
frames. Table 4.3 shows the data for frames a45, b45, and c45 (i.e., frames with varying
geometry). Table 4.4 shows the data for frames b30, b45, and b60 (i.e., frames with
varying coefficients of friction. These tables show that QM1, QM2, and QM3 fulfill the
first criterion (the sum of the modal means should be 1).
The data in Tables 4.3 and 4.4 also suggest that among the four quantification
measures, QM2 generates results with the least COV. For the first mode responses, the
COV for QM2 is in the range of 4% to 11%, which is significantly lower than that of the
other QMs. For the higher mode responses, the COV of QM2 seemed to be a bit larger
compared to those of first mode responses, though they are lower than those of the other
quantification measures. Therefore, QM2, the Normalized Modal Absolute Area Intensity
(NMAAI) measure, is the best of the proposed quantification measures for modal
response of SC-CBF systems.
108
4.9 Modal Response Quantification Results
As QM2 (NMAAI) was found to be the most effective of the four described
quantification measures, only this measure is used to compare the higher mode responses
in the studied SC-CBFs. Comparisons will be made between the set of prototypes with
varying frame geometries (a45, b45, and c45) as well as prototypes with varying friction
coefficients (b30, b45, b60). In Section 4.8, only the base shear data were considered in
the presentation of the different quantification methods; here, other response quantities
(e.g., roof drift and story shear) will also be discussed.
4.9.1 Effect of Frame Geometry
The modal intensities of frames a45, b45, and c45 have been compared for different
response quantities to determine if there is any trend in the higher mode effects of SC-
CBFs with changing frame geometries. Figure 4.8 shows the distribution of normalized
modal absolute area intensities for base shear responses of frames a45, b45, and c45. By
definition, smaller first mode intensity leads to larger higher mode intensity; it is
therefore convenient to study the intensity values for the first mode rather than looking at
those for the individual higher modes (e.g., the 2nd and 3rd modes). The normalized first
mode base shear intensities are largest for frame c45 and lowest for frame a45,
suggesting that the higher mode contribution to base shear response decreases with an
increase of frame bay width.
Figure 4.9 shows the mean modal intensities of story shear responses for frames a45,
b45, and c45. The trend in the mean story shear intensities in these three frames is similar

109
to that of base shear intensities (except in the fourth story): higher mode effects in the
story shear responses seem to be the least for frame c45.
Figure 4.10 shows the distribution of normalized modal intensities for roof drift
responses for frames a45, b45, and c45. The time history records of modal responses
shown in Section 4.6.2 suggested that the higher mode contribution to roof drift is
negligible. For frames a45 and b45, the mean normalized first mode roof drift intensities
are about 90%, indicating the responses are dominated by the first mode. For frame c45,
the higher mode effects in roof drift response increase as the mean first mode intensity is
reduced to about 84%. The mean modal intensities of story drift responses shown in
Figure 4.11 also show similar trends: the higher mode effects are highest for frame c45,
indicating that higher mode contributions to displacement quantities are increased with
increasing frame bay width.
4.9.2 Effect of Friction
The modal intensities of frames b30, b45, and b60 have been compared for different
response quantities to determine trends in the higher mode contributions for frames with
changing friction coefficients. Figure 4.12 shows the normalized modal intensities for
base shear response of frames b30, b45, and b60. The higher mode effects are similar for
frames b45 and b60, though the higher mode effects for frame b30 are less significant.
Figure 4.13 shows that the trends in the mean story shear intensities are similar except for
the second story shear, which is dominated by first mode response.
110
No trend is observed in the mean modal intensities for roof drift response of frames
b30, b45, and b60 shown in Figure 4.14: the modal intensities are nearly identical for the
three frames. As shown in Figure 4.15, the first mode mean intensities for story drift are
similar for frames b30 and b60, and slightly higher for frame b45, though there is no
definite trend with the change in friction coefficients.
4.10 Summary
This chapter addressed the higher mode effects on SC-CBF systems. Additional
prototypes had been introduced before modal properties of each prototype were
presented. The approximate modal decomposition technique by using “effective” pseudo-
acceleration and “effective” peak displacement was described. This technique was
applied on the dynamic time history analysis results to determine the modal responses.
Three proposed quantification measures along with the conventional peak-based
measure were described in details. These measures were applied on the base shear
responses of each prototype and the results were compared and analyzed to select the
most appropriate and effective measure for the quantification of higher mode effects on
SC-CBF responses. Since the proposed normalized modal absolute area intensity
(NMAAI) was found to be the most effective measure, it was used to quantify and
compare the higher mode effects on prototype sets with varying frame geometries as well
as varying friction properties.

111
Table 4.1 – Modal properties of prototypes with varying frame geometries
Frames Circular Frequency,
ωn (rad/s) Period,
T (s) mode 1 mode 2 mode 3 mode 4 mode 1 mode 2 mode 3 mode 4
a45 10.980 35.520 48.405 64.637 0.572 0.177 0.130 0.097 b45 12.610 35.852 47.959 60.759 0.498 0.175 0.131 0.103 c45 13.794 36.834 46.683 59.342 0.455 0.171 0.135 0.106
Table 4.2 – Modal properties of prototypes with varying coefficients of friction
Frames Circular Frequency,
ωn (rad/s) Period,
T (s) mode 1 mode 2 mode 3 mode 4 mode 1 mode 2 mode 3 mode 4
b30 13.376 38.572 51.089 65.213 0.470 0.163 0.123 0.096 b45 12.610 35.852 47.959 60.759 0.498 0.175 0.131 0.103 b60 12.532 35.690 48.291 59.512 0.501 0.176 0.130 0.106

112
Table 4.3 – Quantification data of modal base shear responses for prototypes with varying frame geometries
Mean Sum of Modal Means
Coefficient of Variation Mode 1 Mode 2 Mode 3 Mode 1 Mode 2 Mode 3
QM1 a45 0.631 0.608 0.058 1.309 0.211 0.204 0.214 b45 0.715 0.507 0.025 1.259 0.177 0.216 0.270 c45 0.783 0.335 0.008 1.127 0.090 0.238 0.209
QM2 a45 0.527 0.448 0.024 1.000 0.328 0.392 0.614 b45 0.662 0.332 0.007 1.000 0.224 0.438 1.355 c45 0.750 0.248 0.003 1.000 0.109 0.322 1.138
QM3 a45 0.725 0.237 0.032 1.000 0.103 0.313 0.085 b45 0.762 0.216 0.016 1.000 0.090 0.317 0.103 c45 0.831 0.164 0.004 1.000 0.052 0.261 0.148
QM4 a45 0.783 0.208 0.008 1.000 0.250 0.912 0.801 b45 0.862 0.134 0.003 1.000 0.169 1.071 0.613 c45 0.912 0.087 0.001 1.000 0.088 0.922 0.723
Table 4.4 – Quantification data of modal base shear responses for prototypes with varying coefficients of friction
Mean Sum of Modal Means
Coefficient of Variation Mode 1 Mode 2 Mode 3 Mode 1 Mode 2 Mode 3
QM1 b30 0.769 0.400 0.023 1.194 0.139 0.280 0.167 b45 0.715 0.507 0.025 1.259 0.177 0.216 0.270 b60 0.739 0.471 0.021 1.236 0.107 0.241 0.227
QM2 b30 0.705 0.289 0.007 1.001 0.155 0.358 1.555 b45 0.662 0.332 0.007 1.000 0.224 0.438 1.355 b60 0.701 0.294 0.006 1.000 0.121 0.280 1.114
QM3 b30 0.829 0.159 0.011 1.000 0.049 0.247 0.154 b45 0.762 0.216 0.016 1.000 0.090 0.317 0.103 b60 0.771 0.214 0.011 1.000 0.070 0.244 0.134
QM4 b30 0.902 0.093 0.004 1.000 0.118 1.115 0.761 b45 0.862 0.134 0.003 1.000 0.169 1.071 0.613 b60 0.869 0.126 0.004 1.000 0.120 0.808 0.738

113
Figure 4.1 – Normalized displaced shapes of frames a45, b45, and c45 for- (a) 1st mode and rocking displaced shape; (b) 2nd mode; and (c) 3rd mode
Figure 4.2 – Normalized displaced shapes of frames b30, b45, and b60 for- (a) 1st mode and rocking displaced shape; (b) 2nd mode; and (c) 3rd mode
0
1
2
3
4
0.0 0.5 1.0
a45
b45
c45
Rocking
Normalized Displacement
Floo
r Lev
el
(a) 1st Mode
0
1
2
3
4
-2.0 -1.0 0.0 1.0 2.0Normalized Displacement
(b) 2nd Mode
0
1
2
3
4
-1.0 -0.5 0.0 0.5 1.0 1.5
(c) 3rd Mode
Normalized Displacement
0
1
2
3
4
0.0 0.5 1.0 1.5
b30b45b60rocking
Normalized Displacement
Floo
r Lev
el
(a) 1st Mode
0
1
2
3
4
-2.0 -1.0 0.0 1.0 2.0Normalized Displacement
(b) 2nd Mode
0
1
2
3
4
-1.0 -0.5 0.0 0.5 1.0 1.5Normalized Displacement
(c) 3rd Mode

114
Figure 4.3 – Distribution of modal effective pseudo-acceleration responses for frame
b45

115
Figure 4.4 – Base shear response of frame b45 to arl360: total response vs.- (a) 1st
mode response; (b) 2nd mode response; and (c) 3rd mode response
0 2 4 6 8 10 12 14 16 18 20
-500
0
500
Bas
e Sh
ear
(kip
)
(a)
Total ResponseModal Response
0 2 4 6 8 10 12 14 16 18 20
-500
0
500
Bas
e Sh
ear
(kip
)
(b)
0 2 4 6 8 10 12 14 16 18 20
-500
0
500
Bas
e Sh
ear
Res
pons
e (k
ip)
Time (s)
(c)

116
Figure 4.5 – Overturning moment response of frame b45 to arl360: total response vs.- (a) 1st mode response; (b) 2nd mode response; and (c) 3rd mode response
0 2 4 6 8 10 12 14 16 18 20
-2
-1
0
1
2x 10
5O
vert
urni
ng M
omen
t (ki
p-ft
)(a)
Total ResponseModal Response
0 2 4 6 8 10 12 14 16 18 20
-2
-1
0
1
2x 10
5
Ove
rtur
ning
Mom
ent (
kip-
ft)
(b)
0 2 4 6 8 10 12 14 16 18 20
-2
-1
0
1
2x 10
5
Ove
rtur
ning
Mom
ent (
kip-
ft)
Time (s)
(c)
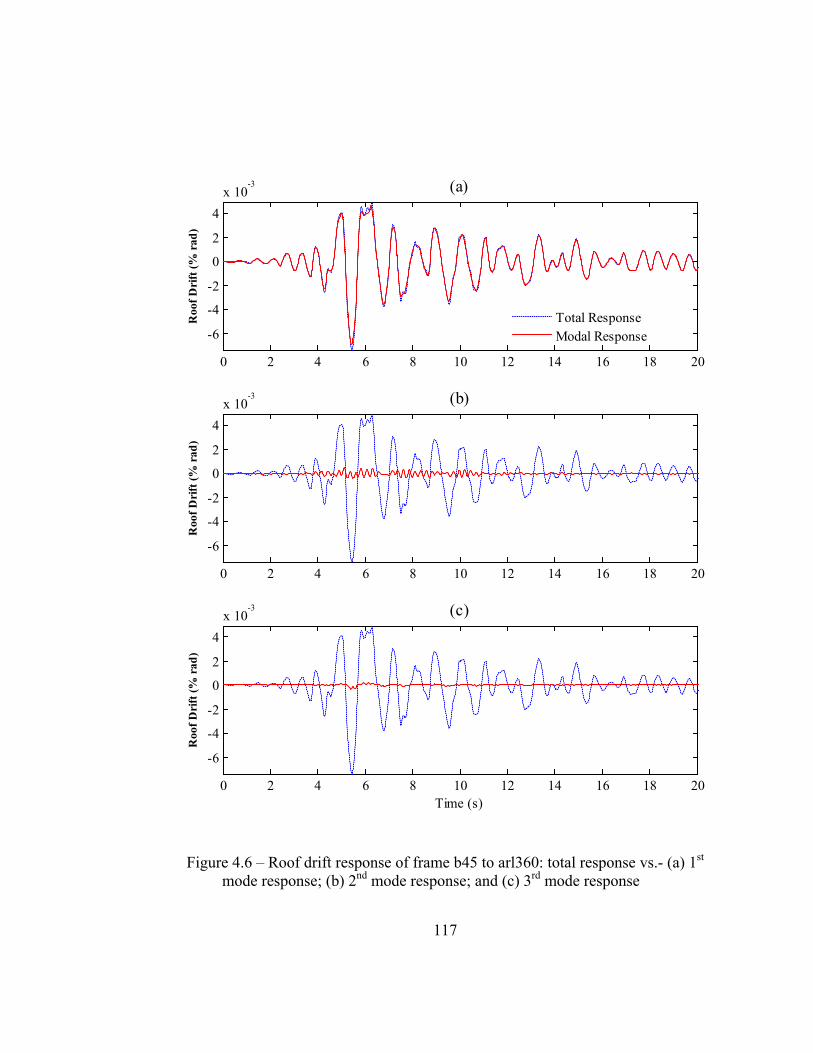
117
Figure 4.6 – Roof drift response of frame b45 to arl360: total response vs.- (a) 1st
mode response; (b) 2nd mode response; and (c) 3rd mode response
0 2 4 6 8 10 12 14 16 18 20
-6
-4
-2
0
2
4x 10
-3R
oof D
rift
(% r
ad)
(a)
Total ResponseModal Response
0 2 4 6 8 10 12 14 16 18 20
-6
-4
-2
0
2
4x 10
-3
Roo
f Dri
ft (%
rad
)
(b)
0 2 4 6 8 10 12 14 16 18 20
-6
-4
-2
0
2
4x 10
-3
Roo
f Dri
ft (%
rad
)
Time (s)
(c)

118
Figure 4.7 – Schematics of total and modal time history responses

119
Figure 4.8 – Normalized modal absolute area intensities for base shear responses of
frames a45, b45, and c45
Figure 4.9 – Mean normalized modal absolute area intensities for story shear
responses of frames a45, b45, and c45
a45 b45 c450
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Nor
mal
ized
Mod
al A
bsol
ute
Are
a In
tens
ity fo
r Bas
e Sh
ear
Mean
Mean
1st Mode2nd Mode3rd Mode
0 0.2 0.4 0.6 0.8 11
2
3
4
Mean Normalized Modal Absolute Area Intensity for Story Shear
Stor
y
a45 (1st Mode)a45 (2nd Mode)b45 (1st Mode)b45 (2nd Mode)c45 (1st Mode)c45 (2nd Mode)

120
Figure 4.10 – Normalized modal absolute area intensities for roof drift responses of
frames a45, b45, and c45
Figure 4.11 – Mean normalized modal absolute area intensities for story drift
responses of frames a45,b45, and c45
a45 b45 c450
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Nor
mal
ized
Mod
al A
bsol
ute
Are
a In
tens
ity fo
r Roo
f Drif
t
Mean
Mean
1st Mode2nd Mode3rd Mode
0 0.2 0.4 0.6 0.8 11
2
3
4
Mean Normalized Modal Absolute Area Intensity for Story Drift
Stor
y
a45 (1st Mode)a45 (2nd Mode)b45 (1st Mode)b45 (2nd Mode)c45 (1st Mode)c45 (2nd Mode)

121
Figure 4.12 – Normalized modal absolute area intensities for base shear responses of
frames b30, b45, and b60
Figure 4.13 – Mean normalized modal absolute area intensities for story shear
responses of frames b30, b45, and b60
b30 b45 b600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Nor
mal
ized
Mod
al A
bsol
ute
Are
a In
tens
ity fo
r Bas
e Sh
ear
MeanMeanMean
Mean
1st Mode2nd Mode3rd Mode
0 0.2 0.4 0.6 0.8 11
2
3
4
Mean Normalized Modal Absolute Area Intensity for Story Shear
Stor
y
b30 (1st Mode)b30 (2nd Mode)b45 (1st Mode)b45 (2nd Mode)b60 (1st Mode)b60 (2nd Mode)

122
Figure 4.14 – Normalized modal absolute area intensities for roof drift responses of
frames b30, b45, and b60
Figure 4.15 – Mean normalized modal absolute area intensities for story drift
responses of frames b30, b45, and b60
b30 b45 b600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Nor
mal
ized
Mod
al A
bsol
ute
Are
a In
tens
ity fo
r Roo
f Drif
t
Mean
Mean
1st Mode2nd Mode3rd Mode
0 0.2 0.4 0.6 0.8 11
2
3
4
Mean Normalized Modal Absolute Area Intensity for Story Drift
Stor
y
b30 (1st Mode)b30 (2nd Mode)b45 (1st Mode)b45 (2nd Mode)b60 (1st Mode)b60 (2nd Mode)

123
CHAPTER V
SUMMARY AND CONCLUSIONS
5.1 Summary
This chapter summarizes the research conducted during the study. First, summaries
of the motivation for the research, the research objectives, and the research scope are
presented. Next, findings from the research are summarized. Finally, recommendations
based on the findings and ideas for further research are presented.
5.1.1 Motivation for Present Research
Conventional concentrically-braced frame (CBF) systems have been a popular lateral
force resisting systems due to their economy and high stiffness. However, the problem
associated with CBFs is that they have limited lateral drift capacity before damage
initiates in the structural members. During earthquakes, CBFs are often subjected to high
drift demands that yield or buckle the brace, which leads to residual lateral drift after the
earthquake.SC-CBF with friction based energy dissipation system had been developed to
enhance the seismic performance of conventional CBF structures. Prior research and
experimental study have seen that such systems performed very well under dynamic
earthquake loading. But further studies on different SC-CBF systems were necessary to
124
develop a larger data set that can validate their performance under DBE-level
earthquakes.
The study involved identifying key design parameters (e.g. frame geometry, friction
coefficient at lateral-load bearings) of SC-CBF structures and altering them to develop
different analytical prototype model. The prototypes with differing friction properties
have been studied by Jeffers (2012) as a part of this research initiative. But this thesis
considers the prototype sets with varying frame geometries which have been analyzed
numerically and thoroughly investigated to study the effects of frame geometry on the
overall seismic behavior of the system. Since higher mode behavior of this type of
structure is a major concern, a comprehensive study has been undertaken to analyze the
modal behavior of SC-CBF systems. For the study of higher mode effects, both sets of
prototypes (differing frame geometries and differing friction properties) are considered.
The overall purpose of this research is to recommend an optimal SC-CBF configuration.
5.1.2 Research Objectives and Scope
The primary objectives of the research presented in this thesis are: (1) to determine
the effect of frame geometry on the seismic performance of SC-CBF systems; and (2) to
study the higher mode response of SC-CBF systems with different friction and geometric
properties.
As described in Chapter 1, the specific tasks necessary to achieve the research
objectives are the following:
125
1. Design prototype SC-CBF prototypes with three different frame bay widths
using previously developed performance-based design criteria.
2. Develop analytical models for SC-CBF prototypes.
3. Perform nonlinear static analyses using OpenSees models.
4. Perform nonlinear dynamic analyses using a suite of DBE-level ground
motions.
5. Perform modal analysis to determine the modal properties of the prototypes.
6. Perform modal decomposition of dynamic time history results.
7. Develop quantification measures for quantifying and comparing higher mode
contributions to total response.
8. Assess the overall behavior and performance of all SC-CBF prototypes.
This research evaluated the seismic performance of SC-CBF systems with friction-
based energy dissipation. The lateral drift capacity before the initiation of structural
damage has been increased in SC-CBFs (in comparison to conventional CBFs) by
softening the lateral force-lateral drift behavior by designing a column base detail which
allows the SC-CBF columns to decompress and uplift at a specified level of lateral force,
initiating a rocking response. This rocking response limits the internal force demands in
the structural members

126
The performance based design criteria developed by Roke et al. (2010) were
implemented in this research. The design procedure is based on specified probabilities of
the responses under earthquake loading exceeding the design demands for selected limit
states. Three four-story prototype buildings with different floor plans were designed for a
site in Van Nuys, California. The design results for the prototype frames were compared
to determine how frame geometry affects SC-CBF design.
Detailed nonlinear analytical models for the prototype SC-CBFs were developed
using OpenSees (Mazzoni et al. 2009). The analytical models included the structural
members (i.e., the beams, columns, braces, and struts) of the SC-CBF, as well as the
adjacent gravity columns and the lean-on column. The lean-on-column accounts for the
stiffness of the gravity columns that are within the tributary area of the SC-CBF and the
P-Δ effects from gravity loads. Nonlinearity was included only in the PT bar elements,
the column base gap opening elements, and the lateral-load bearing elements. Nonlinear
behavior was not modeled in the SC-CBF members; therefore, the model is incapable of
predicting nonlinear behavior of the members.
Monotonic and cyclic static pushovers were conducted on each prototype SC-CBF
system. The results of these analyses were evaluated and compared for each SC-CBF to
determine which frame geometry generated the most desirable behavior under static
lateral loading. Nonlinear response history analyses were performed by subjecting each
prototype to fifteen pairs of DBE-level ground motions. The results of the analyses were
evaluated to verify that the SC-CBF systems exhibited the expected behavior under
seismic loading. The results of the analyses were also compared for each SC-CBF to

127
determine which frame geometry produced the most desirable response to DBE-level
seismic loading.
As determined from the dynamic analysis results, SC-CBFs are prone to significant
higher mode effects. A detailed study was therefore undertaken to investigate the modal
behavior of the SC-CBF systems. The prototype SC-CBFs used in this thesis, as well as
additional prototypes with varying friction properties that were designed and analyzed by
Jeffers (2012), were considered for the study of higher mode effects on the seismic
responses of SC-CBF systems. Modal analyses were carried out for each of five
prototype SC-CBFs and the results were compared to study the effect of frame geometry
and the coefficient of friction at the lateral-load bearings on the modal properties of SC-
CBF systems.
An approximate modal decomposition technique using effective pseudo-acceleration
and effective peak displacement was presented. The modal responses determined using
these decomposition techniques were compared against the total response for several
response quantities. Since base shear was found to be the response quantity that was most
affected by higher-mode response, the modal base shear response results were then used
to quantify the higher mode effects. Three intensity-based measures were proposed for
quantification of higher mode effects. The effectiveness of these proposed measures, as
well as the effectiveness of the conventionally-used peak-based measure, was studied by
applying the measures to the modal base shear responses. The comparative study on these
measures shows that the proposed normalized modal absolute area intensity (NMAAI)

128
modal response quantification measure is the most effective and reliable measure of those
considered in this study.
The NMAAI quantification measure was then applied on several different modal
response quantities (base shear, roof drift, story shear, and story drift) to quantify the
higher mode effects on these response quantities. As expected, the higher mode effects
are different on different response quantities. The NMAAI values for the set of
prototypes with varying frame geometries (frames a45, b45, and c45) are studied to
determine the effect of frame geometry on the higher mode responses of SC-CBF
systems. Similarly, the NMAAI values for the set of prototypes with varying friction
properties (frames b30, b45, and b60) are studied to determine the effect of friction on the
higher mode responses of SC-CBF systems.
5.2 Findings
This section summarizes the results of the research described in this thesis.
5.2.1 SC-CBF Design Results
• As the SC-CBF width bSC-CBF increases, the area of PT steel APT decreases.
• As bSC-CBF increases, the hysteretic energy dissipation ratio βE and design
parameter η increase.
• As bSC-CBF increases, the member sizes tend to decrease. However, the
total SC-CBF weight does not follow the same trend due to the differing
frame width (i.e., beam and brace length) of the prototype SC-CBFs.
129
• As bSC-CBF increases, kelastic and kpd increase.
• The η values for all three SC-CBFs were less than 0.50, so each SC-CBF
was expected to self-center.
5.2.2 Nonlinear Static Analysis Results
• The monotonic pushover results show that there is no trend in the values
of overturning moment at decompression OMD and overturning moment at
PT bar yielding OMY with the change of bSC-CBF.
• The monotonic pushover results show that frames a and b had similar
OMD and OMY values; therefore, the increase in bSC-CBF (i.e., the moment
arm of the frame weight and PT force) for these frames is offset by the
differences in the frame weight and APT.
• The monotonic pushover results show that bSC-CBF does not significantly
affect the roof drift at column decompression. However, the roof drift
capacities at PT bar yielding decreases with the increase of bSC-CBF.
• The cyclic pushover results show that as bSC-CBF increases, the width of the
hysteresis loop increases. This is consistent with the increase in βE.
5.2.3 Nonlinear Dynamic Analysis Results
• Dynamic analysis results for the complete suite of DBE-level ground
motion show that as bSC-CBF increases, the mean values of peak base shear
130
and peak SC-CBF column gap opening increase (i.e., the magnitude of the
rocking response increases).
• Dynamic analysis results for the complete suite of DBE-level ground
motion show that as bSC-CBF increases, the mean value of peak roof drift
response decreases. The results also show that story drifts are typically
larger for higher stories (3rd and 4th stories) than for lower stories (1st and
2nd stories). As bSC-CBF increases, the mean values of story drift tend to
decrease.
• Dynamic analysis results for the complete suite of DBE-level ground
motion show that the mean values of brace force and PT bar force
response decrease as bSC-CBF increases. However, the probability of PT bar
yielding increases with the increase of frame bay width, due in part to the
decreased value of APT.
5.2.4 Higher Mode Quantification Results
• The modal analysis results show that as bSC-CBF increases, modal natural
frequency (e.g., SC-CBF stiffness) increases.
• The modal analysis results show that changing the coefficient of friction
(μ) has negligible effect on the modal properties.

131
• The modal decomposition results show that overturning moment and roof
drift responses are primarily dominated by the first mode, while base shear
responses have large higher mode contributions.
• The comparative study of quantification measures show that the proposed
intensity-based NMAAI (normalized modal absolute area intensity)
quantification measure produces the most consistent and reliable results
with the least dispersion.
• The quantification results using NMAAI show that as bSC-CBF increases,
the higher mode effect on base shear response decreases. The higher mode
effect on story shear also typically decreases with the increase of bSC-CBF.
• The quantification results using NMAAI show that the higher mode effect
on roof drift is very small, but increases with the increase of bSC-CBF. The
trend in the higher mode effects on story drift responses is typically
similar to that of roof drift.
• The quantification results using NMAAI show that there is no definitive
trend in the higher mode effects on the SC-CBF responses with the change
in friction coefficient.
5.3 Conclusions
The major conclusions of the research described in this thesis are:

132
• As the frame unbraced bay width bSC-CBF increases, APT decreases, leading
to more economical designs.
• As bSC-CBF increases, βE and η increase, leading to increased energy
dissipation.
• The η values for all three SC-CBFs were less than 0.50, so each of the
studied SC-CBFs was expected to self-center.
• The frame bay width bSC-CBF does not significantly affect the roof drift at
column decompression; however, the roof drift capacity at PT bar yielding
decreases with the increase of bSC-CBF.
• As the frame bay width bSC-CBF increases, the width of the hysteresis loop
increases. This is consistent with the increase in βE.
• With this specific suite of DBE-level ground motions, as the frame bay
width bSC-CBF increases, the sample means of peak base shear and peak
column base gap opening increase, indicating an increase in the magnitude
of the rocking response.
• The rocking responses soften the structural responses. Therefore, as the
frame bay width bSC-CBF increases, the peak roof drift, the peak PT bar
force response and the peak brace force responses decrease.
133
• The friction coefficient at the lateral-load bearings has a negligible effect
on the mode shapes and frequencies, which are largely driven by frame
geometries.
• The intensity-based NMAAI modal response quantification measure is
better than the conventionally used peak-based measure for quantifications
of higher mode responses of SC-CBF systems.
• The higher mode effects on base shear and story shear responses typically
decrease with an increase of bSC-CBF. The higher mode effects on roof drift
and story drift responses exhibit the opposite trend, though the higher
mode effects on roof drift are typically negligible compared those on base
shear responses.
• There is no definitive trend in the higher mode effects on the response
quantities for SC-CBFs with varying friction properties.
• In general engineering practice, use of a higher frame bay width of the SC-
CBF with any friction coefficient is recommended, as long as η is less than
0.50 to permit the system to self-center, as the higher frame bay width
leads to improved system response and less higher mode effects.
5.4 Original Contributions of Research
This research explored the effects of the frame geometry on the seismic behavior of
SC-CBF systems with friction-based energy dissipation. The research also studied the

134
effects of higher modes on the seismic responses of SC-CBF prototypes with varying
friction and geometric properties. The specific original contributions of this research are:
• Developed analytical models for SC-CBF systems with friction-based
energy dissipation. Detailed nonlinear analytical models of three designed
SC-CBF prototypes with varying frame geometries were constructed in
OpenSees (Mazzoni et al. 2009). The primary components of the model
are the SC-CBF, the adjacent gravity columns, and the lean-on column,
which is introduced to account for P-Δ effects on the SC-CBF system.
• Performed nonlinear static and dynamic analyses using the analytical
models of the designed SC-CBF systems. The nonlinear analytical models
developed for the three SC-CBF systems were subjected to a number of
static and dynamic analyses. Nonlinear static analyses were performed to
determine the response of the prototypes to monotonic and cyclic
pushovers. Nonlinear dynamic analyses were carried out to determine the
responses of the prototypes to a suite of 15 pairs of DBE-level ground
motions.
• Analyzed the results of the static and dynamic numerical simulations. The
results of this parametric study increased the knowledge base of SC-CBF
seismic response and also provided important insight into a major design
parameter for SC-CBF systems.

135
• Performed modal decomposition of dynamic responses of the prototypes
with varying geometric and friction properties. Five prototype SC-CBFs
with varying geometric and friction properties were considered for
studying the higher mode behavior of SC-CBF systems. Modal
decomposition was carried out on the dynamic responses for each of the
prototypes to determine modal responses.
• Proposed three measures for quantification of higher mode responses and
performed a comparative study of the proposed measures and the
conventionally used peak-based measure. Three quantification measures
have been proposed to quantify the modal contributions on the total
responses. The proposed measures and the conventionally used peak-
based measure were applied to the modal base shear responses for each
prototype SC-CBF. The results were studied to find the most effective
measure for quantification of higher mode effects.
• Compared the higher mode effects on frames with varying friction and
geometric properties. The proposed intensity-based measure was applied
to various modal response quantities (e.g., base shear, story shear, roof
drift, and story drift) of each prototype SC-CBF. The results were studied
to determine the effect of friction and geometric properties on the higher
mode responses of SC-CBF systems.
136
5.5 Future Work
This research explored the seismic performance of SC-CBF systems with friction-
based energy dissipation. This section identifies research that can further develop the
knowledge base on SC-CBF systems with friction-based energy dissipation.
• This thesis considered three prototypes to study the effect of frame
geometry. Studying more prototypes would help to make more accurate
prediction about this key design parameter.
• This thesis considered four-story buildings as prototypes for the study of
higher mode effects. Taller buildings should be considered in future
research.
• Only DBE-level dynamic response was included in this research. Further
research of the response of SC-CBF systems under MCE-level ground
motions is needed.
• This thesis did not include experimental research. Further experimental
simulations performed on SC-CBF test structures are necessary to validate
analytical results.
• A detailed investigation of the hysteretic behavior of the SC-CBF systems
should be undertaken to determine the reasons for the fluctuations from
the ideal flag-shaped hysteresis loops.

137
• Research into the behavior of SC-CBFs displaced out of plane is needed
(i.e., three-dimensional studies of buildings with SC-CBFs as the lateral
force resisting system).
• A comparative study of the life-cycle costs of buildings with SC-CBF
systems and the life-cycle costs of buildings with conventional CBF
systems should be undertaken to illustrate the cost-effectiveness of a
damage-free SC-CBF system.

138
REFERENCES
AISC (2005a). Seismic Provisions for Structural Steel Buildings. American Institute of
Steel Construction, Chicago, IL.
AISC (2005b). Specification for Structural Steel Buildings. American Institute of Steel Construction, Chicago, IL.
AISC (2005c). Steel Construction Manual, 13th Edition. American Institute of Steel Construction, Chicago, IL.
ASCE (2010). Minimum Design Loads for Buildings and Other Structures, ASCE7-10.American Society of Civil Engineers (ASCE), Reston, VA.
Aoyama, H. (1987). “Earthquake Resistant Design of Reinforced Concrete Frame Buildings with ‘Flexural’ Walls,” Journal of the Faculty of Engineering, The University of Tokyo, 39(2), pp 87-109.
BSSC (2003). NEHRP Recommended Provisions for Seismic Regulations for New Buildings and Other Structures. FEMA 450.Building Seismic Safety Council, National Institute of Building Sciences, Washington, D.C.
Chopra, A.K. (2007). Dynamics of Structures – Theory and Applications to Earthquake Engineering, 3rd Edition. Prentice Hall, Upper Saddle River, NJ.
Christopoulos, C.; Tremblay, R.; Kim, H.-J.; and Lacerte, M. (2008). “Self-Centering Energy Dissipative Bracing System for the Seismic Resistance of Structures: Development and Validation,” ASCE Journal of Structural Engineering, 134(1),pp 96-107.
Jeffers, B. (2012). “Parametric Study of Self-Centering Concentrically Braced Frames with Friction-Based Energy Dissipation.” M.S. Thesis, Department of Civil and Environmental Engineering, University of Akron, Akron, OH.
Kabeyasawa, T. (1987). “Ultimate-State Design of Reinforced Concrete Wall-Frame Structures,” Proceedings of the 10th Pacific Conference on Earthquake Engineering, Wairakei, New Zealand, August 5-8.

139
Kurama, Y. C.; Pessiki, S.; Sause, R.; and Lu, L.-W. (1999), “Seismic Behavior and Design of Unbonded Post-Tensioned Precast Concrete Wall,” PCI Journal, 44(3), 72-89.
Mazzoni, S.; McKenna, F.; Scott, M.H.; Fenves, G.L.; et al. (2009). Open System for Earthquake Engineering Simulation (OpenSees) User Command-Language Manual. Pacific Earthquake Engineering Research Center, University of California, Berkeley.
New Zealand Standards (NZS) (2006), Appendix B: Special Provisions for the Seismic Design of Ductile Jointed Precast Concrete Structural Systems, NZS 3101:2006, Concrete Standard, Wellington, New Zealand.
Priestley, M. J. N.; Sritharan, S.; Conley, J. R.; and Pampanin, S. (1999). “Preliminary Results and Conclusions from the PRESSS Five-Story Precast Concrete Test Building,’’ PCI Journal 44(6), 42–67.
Ricles, J.M.; Sause, R.; Garlock, M.M.; and Zhao, C. (2001). “Posttensioned Seismic- Resistant Connections for Steel Frames,” ASCE Journal of Structural Engineering, 127(2), pp 113-121.
Roke, D.; Sause, R.; Ricles, J.M.; Seo, C.-Y.; and Lee, K.-S. (2006). “Self-Centering Seismic-Resistant Steel Concentrically-Braced Frames,” Proceedings of the 8th U.S. National Conference on Earthquake Engineering, EERI, San Francisco, April 18-22.
Roke, D.; Sause, R.; Ricles, J.M.; and Gonner, N. (2009). “Damage-Free Seismic-Resistant Self-Centering Steel Concentrically-Braced Frames,” STESSA 2009, Proceedings of the 6th International Conference on Behavior of Steel Structures in Seismic Areas, Philadelphia, August 16-20.
Roke, D.; Sause, R.; Ricles, J.M.; & Chancellor, N.B. (2010). “Damage-Free Seismic-Resistant Self-Centering Concentrically-Braced Frames,” ATLSS Report 10-09, Lehigh University, Bethlehem, PA, USA.
Seo, C.-Y.; and Sause, R. (2005). “Ductility Demands on Self-Centering Systems Under Earthquake Loading,” ACI Structural Journal, 102(2), pp 275-285.
Seo, C.-Y.(2005). “Influence of Ground Motion Characteristics and Structural Parameters on Seismic Responses of SDOF Systems.” Ph.D. Dissertation, Department of Civil and Environmental Engineering, Lehigh University, Bethlehem, PA.
Wiebe, L.; and Christopoulos, C. (2009), “Mitigation of Higher Mode Effects in Base-Rocking Systems by Using Multiple Rocking Sections”, Journal of Earthquake Engineering, 13(S1), pp83-108.














![kkt_6_dan_7_pemupukan_2014 [Compatibility Mode]](https://static.fdokumen.com/doc/165x107/6322b43c28c445989105e2db/kkt6dan7pemupukan2014-compatibility-mode.jpg)




