Origins of the edge shadowing artefact in medical ultrasound imaging
10
doi:10.1016/j.ultrasmedbio.2004.07.014 ● Original Contribution ORIGINS OF THE EDGE SHADOWING ARTEFACT IN MEDICAL ULTRASOUND IMAGING ROBIN STEEL,* TAMIE L. POEPPING, † ROSEMARY S. THOMPSON* and CHARLES MACASKILL* *School of Mathematics and Statistics, University of Sydney, Sydney, NSW, Australia; and † Department of Medical Physics, University of Edinburgh, Edinburgh, UK (Received 5 March 2004, revised 25 June 2004, accepted 22 July 2004) Abstract—Ultrasound (US) B-mode images distal to smooth, rounded cavities, such as cysts, containing a fluid with a speed of sound mismatch to the surrounding tissue, often exhibit a “refractile” edge shadowing artefact. This usually appears as narrow, hypoechoic, shadow lines extending a significant distance distal to the lateral edges of the fluid cavity and parallel to the US beam. The true reasons for this artefact are likely to be complex and to vary from case to case, with many different explanations found in the literature. However, we present a simplified theoretical model for the phenomenon based on a pulsed, finite-beam solution of US scattering from circular fluid-filled cylinders that suggests that “edge” shadows can occur distal not only to edges but also to points where the incident beam intersects the cavity near to the critical angle. Both mechanisms support the view that edge shadows can arise from the combination of unusually high wavefront spreading and the speckle- generating nature of the surrounding tissue. In vitro data from a tissue-mimicking phantom confirms that the edge shadow structure depends on the sign of the speed of sound contrast between the cylinder fluid and the surrounding medium. (E-mail: [email protected]) © 2004 World Federation for Ultrasound in Medicine & Biology. Key Words: Edge artefact, Shadowing, Ultrasound, Cyst, Refraction, Refractile, Reflection, Diffraction, Sound speed, B-mode. INTRODUCTION There have been many reports in the literature describing and explaining the “refractile,” or “edge shadowing,” arte- fact. This often occurs on clinical ultrasound (US) B-mode images distal to smooth, rounded cavities, such as cysts, aneurysms and blood vessels, which contain a fluid with a speed of sound (SOS) mismatch to the surrounding tissue. It can also contaminate slice reconstructions in 3-D US (Bailey et al. 2001). The typical geometry is shown in Fig. 1a, with the corresponding, highly schematic, B-mode im- age in Fig. 1b. An early paper by Sommer et al. (1979) analysed edge shadowing distal to rounded fluid-filled cav- ities. Their explanation was based on the reflection and refraction of the US beam where it entered and exited the cavity containing the fluid of contrasting velocity (at points 1 and 2 in Fig. 1a). They argued that, when the fluid in the cavity had a SOS lower than the surrounding tissue, the cavity would act as a lens to partially focus the US in the tissue distal to the cavity and, in so doing, by bending the lateral rays inward, would leave a shadow region distal to the edges of the cavity uninsonated (region C in Fig. 1a). For the case of higher cavity SOS, they argued that total reflection of the US close to the lateral proximal edges of the cavity would again result in a shadow region, distal to the cavity edges, being relatively poorly insonated. They demonstrated edge shadowing in vitro by insonating cylin- drical cavities in a tissue-mimicking material (TMM) phan- tom that contained fluid of various SOS relative to that of the TMM, and presented several clinical images exhibiting the artefact. However, Robinson et al. (1981) argued that this explanation was incomplete, and extended the analysis to consider both the edge artefact and the enhancement typically seen distal to fluid-filled structures in the region bounded by the narrow edge shadows. They pointed out that, for a shadow to appear on the B-mode image, it is insufficient to demonstrate that there is a physical region behind the edges of the cavity that is in shadow: a shadow will appear on a line in the image only if the beam, emerg- ing from the corresponding point on the transducer face, is deflected in such a way that it returns a low-amplitude echo. Address correspondence to: Dr. Robin Steel, School of Mathe- matics and Statistics, Carslaw Building F07, University of Sydney, Sydney, NSW 2006, Australia. E-mail: [email protected] Ultrasound in Med. & Biol., Vol. 30, No. 9, pp. 1153–1162, 2004 Copyright © 2004 World Federation for Ultrasound in Medicine & Biology Printed in the USA. All rights reserved 0301-5629/04/$–see front matter 1153
Transcript of Origins of the edge shadowing artefact in medical ultrasound imaging

Ultrasound in Med. & Biol., Vol. 30, No. 9, pp. 1153–1162, 2004Copyright © 2004 World Federation for Ultrasound in Medicine & Biology
Printed in the USA. All rights reserved0301-5629/04/$–see front matter
doi:10.1016/j.ultrasmedbio.2004.07.014
● Original Contribution
ORIGINS OF THE EDGE SHADOWING ARTEFACT IN MEDICALULTRASOUND IMAGING
ROBIN STEEL,* TAMIE L. POEPPING,† ROSEMARY S. THOMPSON* and CHARLES MACASKILL**School of Mathematics and Statistics, University of Sydney, Sydney, NSW, Australia; and †Department of Medical
Physics, University of Edinburgh, Edinburgh, UK
(Received 5 March 2004, revised 25 June 2004, accepted 22 July 2004)
Abstract—Ultrasound (US) B-mode images distal to smooth, rounded cavities, such as cysts, containing a fluidwith a speed of sound mismatch to the surrounding tissue, often exhibit a “refractile” edge shadowing artefact.This usually appears as narrow, hypoechoic, shadow lines extending a significant distance distal to the lateraledges of the fluid cavity and parallel to the US beam. The true reasons for this artefact are likely to be complexand to vary from case to case, with many different explanations found in the literature. However, we present asimplified theoretical model for the phenomenon based on a pulsed, finite-beam solution of US scattering fromcircular fluid-filled cylinders that suggests that “edge” shadows can occur distal not only to edges but also topoints where the incident beam intersects the cavity near to the critical angle. Both mechanisms support the viewthat edge shadows can arise from the combination of unusually high wavefront spreading and the speckle-generating nature of the surrounding tissue. In vitro data from a tissue-mimicking phantom confirms that theedge shadow structure depends on the sign of the speed of sound contrast between the cylinder fluid and thesurrounding medium. (E-mail: [email protected]) © 2004 World Federation for Ultrasound inMedicine & Biology.
Key Words: Edge artefact, Shadowing, Ultrasound, Cyst, Refraction, Refractile, Reflection, Diffraction, Sound
speed, B-mode.INTRODUCTION
There have been many reports in the literature describingand explaining the “refractile,” or “edge shadowing,” arte-fact. This often occurs on clinical ultrasound (US) B-modeimages distal to smooth, rounded cavities, such as cysts,aneurysms and blood vessels, which contain a fluid with aspeed of sound (SOS) mismatch to the surrounding tissue.It can also contaminate slice reconstructions in 3-D US(Bailey et al. 2001). The typical geometry is shown in Fig.1a, with the corresponding, highly schematic, B-mode im-age in Fig. 1b. An early paper by Sommer et al. (1979)analysed edge shadowing distal to rounded fluid-filled cav-ities. Their explanation was based on the reflection andrefraction of the US beam where it entered and exited thecavity containing the fluid of contrasting velocity (at points1 and 2 in Fig. 1a). They argued that, when the fluid in thecavity had a SOS lower than the surrounding tissue, thecavity would act as a lens to partially focus the US in the
Address correspondence to: Dr. Robin Steel, School of Mathe-
matics and Statistics, Carslaw Building F07, University of Sydney,Sydney, NSW 2006, Australia. E-mail: [email protected]1153
tissue distal to the cavity and, in so doing, by bending thelateral rays inward, would leave a shadow region distal tothe edges of the cavity uninsonated (region C in Fig. 1a).For the case of higher cavity SOS, they argued that totalreflection of the US close to the lateral proximal edges ofthe cavity would again result in a shadow region, distal tothe cavity edges, being relatively poorly insonated. Theydemonstrated edge shadowing in vitro by insonating cylin-drical cavities in a tissue-mimicking material (TMM) phan-tom that contained fluid of various SOS relative to that ofthe TMM, and presented several clinical images exhibitingthe artefact. However, Robinson et al. (1981) argued thatthis explanation was incomplete, and extended the analysisto consider both the edge artefact and the enhancementtypically seen distal to fluid-filled structures in the regionbounded by the narrow edge shadows. They pointed outthat, for a shadow to appear on the B-mode image, it isinsufficient to demonstrate that there is a physical regionbehind the edges of the cavity that is in shadow: a shadowwill appear on a line in the image only if the beam, emerg-ing from the corresponding point on the transducer face, is
deflected in such a way that it returns a low-amplitude echo.
1154 Ultrasound in Medicine and Biology Volume 30, Number 9, 2004
They showed how strong, off-axis, point reflectors couldget “written in” to the edge shadow on the B-mode image,and argued, on ray-tracing grounds, that the beam reflectedfrom near the lateral edges of the cavity (such as ray B inFig. 1a) would diverge strongly and hence reduce rapidly inamplitude, by geometric attenuation, and so produce loweramplitude echoes — the “edge shadow.”
To further quantify the effects described by Robinsonet al. (1981), LaFollette and Ziskin (1986) reported a moredetailed ray-tracing model of the scatter of US from thetissue surrounding a fluid-filled cylinder of lower SOS, thatmade several explicit assumptions. In particular, they as-sumed that the part of the US beam that was reflected onentry to and exit from the cavity (rays B and B� in Fig. 1a),could be neglected. Ziskin et al. (1990) also studied theeffect of scan format (rectilinear or sector) on the appear-ance of the artefact, and suggested that the edge artefactresults from refraction at the fluid cavity. They character-ised the edge shadows (regions E in Fig. 1b) as anechoictriangular regions extending distally from the lateral edgesof the SOS cavity. Rubin et al. (1991b), however, arguedthat the predictions of previous ray-tracing descriptions ofthe edge artefact, in particular the predicted broadening withdepth of the shadow width for larger SOS contrasts, did notdescribe well the clinical phenomenon, which they charac-terised as “an abrupt, discrete diminution of signal.” Theyperformed in vitro experiments, insonating cylindrical wellsin a TMM phantom, demonstrating shadowing both at the
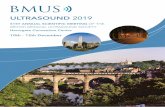
Fig. 1. (a) Simplified schematic of the simulated system (not toscale), showing, A, the transmitted pulse refracted and B,reflected at the top boundary of the contrast cylinder, with theforward propagation direction indicated by open arrows. Thin,solid arrows indicate the sound scattered isotropically from theTMM, which is received again by the transmit transduceroperating in receive mode, and used to form the B-mode image.C denotes a region of reduced insonation amplitude. (b) Sche-matic of corresponding B-mode image, showing D, the dis-torted image of the contrast cylinder and E, the approximatelocations of the edge shadows. The case illustrated is for
reduced SOS within the cylinder.
well edges, but also, interestingly, when the probe was
rotated to be parallel to the cylinder axis such that the beamintersected the flat ends of the cylinder. They were unable toexplain this latter effect by reflection or refraction. Theyalso found that the shadowing had a similar appearance forlow- and high-speed cavity fluids (an unexpected resultaccording to some of the previous ray theories) and sug-gested that a full pulse-echo solution of the wave equation,generalising the analyses of Robinson and Greenleaf (1984,1986) for plane wave insonation, might illuminate the pro-cesses involved. The previous geometrical models havebeen extended in this direction by Harpen (2000) in a studyof comet-tail artefact, and by Filipczynski et al. (1996), whoused the partial wave scattering theory for pulsed, infinite,plane wave scattering from spheres suspended in water (amodel that includes diffraction). They said that, for spheresup to 3.5 mm radius, “diffraction effects are the determinantfor the shadow formation,” and, although their analysisdemonstrated the existence of shadow regions behind var-ious spheres, this was in physical space, and, as Robinson etal. (1981) pointed out, a full explanation of the edge artefactmust account for the shadow on the B-mode image.
In this paper, building on the suggestion in Rubin etal. (1991b), we have calculated the B-mode image ofliquid cylinders, with either a SOS or a density contrast,embedded in a TMM phantom, using the pulsed finite-beam solution of the wave equation (Steel and Fish2003), neglecting absorption in all media. We first studythe effect of cylinder diameter and SOS contrast (bothpositive and negative) on the appearance of the edgeartefact. Then, following Robinson and Greenleaf(1984), we simulate a cylinder with a 10% density con-trast, but no SOS contrast. The theoretical predictions arethen compared with in vitro images acquired with alinear array on a commercial US system. Experimentalquantification of the echo signal amplitude received fromthe edge shadow regions was achieved using a speciallyconstructed “echo calibration” phantom incorporatingvarying-thickness blocks of high-attenuation TMM toprovide a range of specific reference attenuations.
MATERIALS AND METHODS
Overview of the theoretical modelIn this section, we describe the model we have used to
simulate the rectilinear B-mode image of a liquid, circularcylinder, embedded in TMM, with either a SOS or a densitycontrast between the liquid comprising the cylinder and theTMM (see Fig. 1). The rectilinear B-mode image is definedas a rectangular grid of grey-scale pixels representing theamplitude of the echoes received, at various delays, follow-ing the transmission of a pulse (Wagner et al. 1983). Twopixels, differing only in their horizontal location on theimage, correspond to the echo amplitudes received for
different lateral offsets of the transducer with respect to the
Edge shadowing artefact ● R. STEEL et al. 1155
cylinder, but at the same delay from pulse transmission.Pixels, differing only in their vertical image location, cor-respond to echoes received at different delays, but for equallateral transducer-cylinder offsets. The existence of anynonzero echo amplitudes and, thus, of any B-mode image,indicates the presence of inhomogeneities in the mediumthrough which the pulse is propagating and, in general, suchinhomogeneities make simulation of the whole train ofevents, from transmission to reception, a formidable task.For this reason, we have made several simplifying assump-tions in our model:
1. Each echo-generating inhomogeneity (“scatterer”) isassumed to give rise to an initially isotropic scatteredwave that suffers no further scattering on its return tothe transducer. Interactions with the cylinder of thisscattered wave, on its return to the transducer, areaccounted for by the pulse-echo sensitivity, describedlater. Hence, the echo from all scatterers can be foundby summing those due to each scatterer individually.
2. To compute the pulse-echo sensitivity of the trans-ducer for each individual point scatterer, we assumethat the acoustic properties of both the cylinder andsurrounding TMM, although different, are each iso-tropic and homogeneous and we neglect absorption,the loss of energy from the incident field to thescattered field, due to random scattering, dispersionof the SOS and any shear wave.
3. Outside the contrast cylinder, the scatterers, each muchsmaller than the US wavelength, are uniformly distrib-uted and uncorrelated from point-to-point in space.Within the cylinder, they are absent, as would be thecase for a cyst containing a homogeneous, nonscatter-ing, fluid.
4. We neglect the “specular” part of the echo, duesimply to the cylindrical inhomogeneity, that wouldbe present even without any point scatterers.
5. The frequency-dependence of the scattering may beimplicitly incorporated as a weighting of the transmitpulse spectrum.
Although these assumptions will not all be valid for areal medium, the model is intended to provide insights intothe mechanism of the edge artefact that will be relevant, atleast qualitatively, to both the in vitro and in vivo situations.In the following two sections, we first describe the methodused to compute the pulse-echo beam sensitivity for a singlescatterer and then show how we have used this sensitivity tocalculate the amplitude of each B-mode pixel.
Calculation of the pulse-echo sensitivity fieldFor each pixel, with its corresponding transducer-
cylinder offset and transmit-receive delay, t, there is aspatial distribution of pulse-echo sensitivity, S(x,t), de-
fined such that S(x,t)e�i�t is the model for the echo signalthat would be received, at time t, from an isotropic pointscatterer located at x, in the absence of other pointscatterers. This is calculated by the method described, indetail, in Steel and Fish (2003), which derived an ex-pression for the echo received from point scatterers lo-cated inside or outside a cylindrical shell immersedwithin a homogeneous fluid. We therefore provide hereonly an outline of the method. The situation is simplifiedin the present paper, in that the insonated object is aliquid cylinder, rather than a solid cylindrical shell, andwe have neglected absorption. Because the pulse-echosensitivity may, by the assumed linearity, be calculatedusing a temporal Fourier series, from the sensitivities fora finite series of continuous-wave (CW) sensitivity fields,the problem reduces to computing CW finite-beam sen-sitivities. Assuming that the transducer is linear, passiveand reciprocal, in the sense of Foldy and Primakoff(1945), and that reciprocity holds for the acoustic fielditself (de Hoop 1990), this, in turn, reduces to the calcu-lation of the CW finite-beam transmitted field. Using thespatial angular-spectrum method to construct the CWfinite beam, this may be computed from solutions to theproblem of infinite, harmonic plane-wave incidence on afluid cylinder as summarised in Appendix 1.
The simulated transducer was a 7-MHz, 10-mmradius piston, with negligible apodisation, focussed at 5cm from its face, and placed 5 cm above the horizontalplane containing the cylinder axis. It was modelled as aplanar circular disk, with focussing achieved by progres-sive delay of its surface motion toward the centre of theaperture. On transmit, its surface velocity pulse had aGaussian envelope with a 1 �s SD and the receive andtransmit apertures were assumed to be identical. Theplane of the simulated B-mode images and, hence, of theUS beam axis, was always perpendicular to the cylinderaxis. For each pulsed finite beam, it was necessary tocompute 101 CW beams, at a 10-kHz spacing, thusspanning a 1-MHz band width, centred on 7 MHz. Thisallowed the sensitivity to be computed on a 3-cm radiusdomain, centred on the cylinder axis. The accuracy of thebeam construction method over this computational do-main was checked, for the case of a null cylindricalcavity (no SOS or density contrast), by comparison of theCW beam amplitude with that calculated by direct nu-merical evaluation of the harmonic Rayleigh integral.
Calculation of the B-mode pixel amplitude from thepulse-echo sensitivity
Having found the spatial distribution of the pulse-echosensitivity, corresponding to a given B-mode pixel, we thenmade use of our simplified tissue model, described earlier,to compute the received pixel echo amplitude from theentire insonated region. A single speckled realisation of this
pixel amplitude will result from integrating the product of
contra
1156 Ultrasound in Medicine and Biology Volume 30, Number 9, 2004
the sensitivity with the spatial distribution of random scat-terer amplitudes. The speckle noise could, in principle, beremoved by repeating this calculation for a large ensembleof realisations of random scatterers and taking the expecta-tion. However, it is shown in Appendix 2 that this expec-tation is proportional to:
�� �S�x�, t��2d x� (1)
where S(x,t) is the sensitivity distribution correspondingto the pixel and the integral extends over all spaceoutside the cylinder. The simulation images plotted in theResults section were therefore calculated by numericalevaluation of this integral. To mimic time-gain-compen-sation (TGC), all of these “expectation” echoes werenormalised by dividing through by the expectation echoamplitude for the B-line at the far right side of theimages. This line was representative of the “background”image level because it essentially “missed” the cylinder.Note that, although our method is, in theory, fully 3-D,restricted computer resources made it necessary to limitthe calculation of the B-mode amplitude to the central2-D plane, transverse to the cylinder, through the centreof the US beam.
Experimental methodsExperimental images of edge shadows on two tissue-
mimicking phantoms were acquired using L7-4 (centrefrequency � 5 MHz) and L12-5 (centre frequency � 7MHz) probes with an HDI5000 US system (Philips Ultra-sound, Bothell, WA). The phantoms were rectangularblocks of standard TMM (Ramnarine et al. 2001) (see Table1), enclosing either a 12.5-mm or 30.0-mm diameter circu-lar cylindrical cavity. The boundary of this cavity at whichthe edge shadows originated was at least 2 cm from allsurfaces of the TMM block. The US probes were attached,in turn, to an automated linear positioning system (LPS)(Hammer et al. 2003) and positioned just to contact, atnormal incidence, the flat top surface of the phantom, but
Table 1. Properties (� error estimate)
Fluid SOS, m/s (contrast)
52.8% w/w ethylene glycol 1684 � 5 (�9%)28% w/w ethylene glycol 1600 � 5 (�4%)12.5% w/w glycerol 1536 � 5 (0%)55% w/w ethanol 1445 � 5 (�6%)65% w/w isopropanol 1337 � 5 (�13%)Ethanol 1160 � 10 (�25%)TMM 1541 � 5
55% w/w ethanol is 55 g ethanol in 45 g water; SOS and impedancefreshly prepared solutions prior to use in phantom.
not to compress it. The cavity was then filled with the
degassed fluids, detailed in Table 1, to achieve various SOScontrasts with the surrounding TMM. Using the LPS, lowmechanical index (MI � 0.2) B-mode images were thenacquired from at least 100 positions along the cylinder axis,separated sufficiently so that the speckle could be assumedto be approximately independent on each image. Thesewere then registered and averaged to give reduced-speckle“expectation” images. A single focal zone was set at either2.8 cm (L7-4) or 3.0 cm (L12-5), corresponding approxi-mately to the cavity midline. All ensembles were acquiredas rapidly as possible after insertion of the cavity fluid tominimise any SOS alteration caused by diffusion betweenthe fluid and TMM. Between experiments, the cavity wasrefilled with fresh 0% SOS contrast fluid for sufficient timeto allow the TMM to recover its original SOS value.
The experimental expectation images shown in theResults section are derived from TIFF images as output bythe HDI5000. To quantify the darkness of the shadows andto circumvent any nonlinear transformation between thereal echo amplitude and this TIFF level, we adopted thefollowing procedure. A third phantom was built, incorpo-rating five rectangular blocks of high-attenuation TMM(0.95 dB/cm/MHz at 7 MHz), varying in thickness between5.0 and 25.1 mm, moulded on to the top of a standard TMM(0.56 dB/cm/MHz at 7 MHz) phantom. These blocks atten-uated the echoes received from the underlying standardTMM by a range of values (e.g., 2.7 dB to 13.7 dB for theL12-5), sufficient to allow quantification of the shadowdarkness. All shadows were quantified at an image depth 1mm below the base of the lumen. For this procedure to bevalid, the HDI5000 was set up in the same way whenimaging the blocks as when imaging the cylindrical phan-toms. The high-attenuation TMM was made in identicalmanner to the standard TMM (Ramnarine et al. 2001),except the quantities of SiC and Al2O3 powders were dou-bled. This modification did not significantly change theSOS of the TMM.
All SOS and absorption measurements were madewith a 7-MHz scanning acoustic macroscope (Ultrasonic
S contrast fluids and TMM at 7 MHz
Absorption,dB/cm/MHz Density, g/mL
Impedancecontrast %
0.09 � 0.01 1.07 � 0.01 �110.07 � 0.01 1.02 � 0.01 �10.03 � 0.01 1.02 � 0.01 �30.15 � 0.01 0.90 � 0.01 �200.24 � 0.01 0.87 � 0.01 �280.18 � 0.01 0.79 � 0.01 �430.56 � 0.01 1.05 � 0.01 0
sts are relative to TMM; All data measured at 20 � 1 °C. Data are for
of SO
Sciences Ltd, Aldershot, UK) that uses a broadband

Edge shadowing artefact ● R. STEEL et al. 1157
pulse-echo substitution technique. This compares theecho signal received from a perfect reflector immersed ina reference fluid, before and after introducing a testsample into the beam path. The SOS is derived from thetime-of-flight difference and the absorption, by measur-ing the decay in signal amplitude over a range of fre-quencies.
RESULTS
Effect of SOS contrast and cylinder diameterSimulated expectation B-mode images for � 10%
SOS contrast for two different cylinder diameters, 6 mmand 12 mm, are shown in Fig. 2 and Fig. 3. Fig. 4 showsthe simulation results for the � 20% SOS contrast,12-mm diameter cylinder. Experimental expectation im-ages of the 12.5-mm diameter cylinder for �9% and�13% SOS contrast, with both probes, are shown in Fig.5. Figure 6 shows L7-4 experimental expectation imagesof the 30-mm diameter cylinder for �13%, �6%, �4%and �9% SOS contrasts. Figure 7 shows experimentalexpectation images of the �25% SOS fluid in the12.5-mm diameter cylinder with both probes and Fig. 8shows the corresponding images for the 0% SOS contrastcase. The experimental and simulation echo levels, at thedarkest parts of the edge shadows, for these cases, quan-tified 1 mm below the base of the lumen image in allcases and expressed as an echo amplitude ratio, areshown in Tables 2 and 3.
Effect of density contrastThe 12-mm diameter, �10% density-only contrast
simulation showed no edge shadows. Attempts to con-firm this experimentally, using an isopropanol-based
Fig. 2. Simulated expectation B-mode image of �10% SOScylinder: (a) 6-mm diameter, (b) 12-mm diameter. True cavity
wall superimposed.
�9% density-only contrast fluid, were inconclusive, with
clear edge shadows always being observed, althoughthese may have been due to a residual SOS contrast.
DISCUSSION
We comment first on the different grey scales of thesimulation and experimental expectation images. In theexperimental expectation images, TGC was applied au-tomatically to the raw echoes by the HDI5000. In thesimulations, however, we simply divided through all theraw B-lines by the rightmost B-line, which essentiallymissed the cylinder. We could have applied a second stepof TGC to the experimental images by applying thissame normalisation, but it was felt that it was preferableto present these images with minimal postprocessing,except for ensemble averaging.
All the experimental expectation images show brightregions on the cylinder midline at the top and bottom of the
Fig. 3. Simulated expectation B-mode image of �10% SOScylinder: (a) 6-mm diameter, (b) 12-mm diameter. True cavity
wall superimposed.
Fig. 4. Simulated expectation B-mode image of 12-mm diam-eter cylinder: (a) �20% SOS, (b) �20% SOS. True cavity wallsuperimposed. Straight (curved) arrow indicates critical angle
(edge) shadow.

1158 Ultrasound in Medicine and Biology Volume 30, Number 9, 2004
lumen. These are believed to result from specular reflec-tions from the cylinder boundary, but could possibly be duein part to residual air bubbles. A largely specular origin issupported by their absence on images of the cylinders takenat 45° to the cylinder axis (not shown).
Both our simulations and experiments suggest that theedge shadows for positive and negative SOS contrast cav-
Fig. 5. Experimental expectation B-mode image of 12.5-mmdiameter cylinder: (a) �9% SOS L7-4, (b) �9% SOS L12-5,(c) �13% SOS L7-4, and (d) �13% SOS L12-5. All images at
normal incidence.
Fig. 6. Experimental expectation B-mode image of 30-mmdiameter cylinder: (a) �4% SOS, (b) �9% SOS, (c) �6%SOS, (d) �13% SOS. All images at normal incidence
with L7-4.
ities differ from each other. In all the simulations, there is ashadow almost directly beneath the cylinder edge (e.g.,curved arrow in Fig. 4a). For the positive SOS simulations(Fig. 2, Fig. 4a), moving in from this “edge” shadow towardthe cylinder midline, the darkness of the shadow at firstgrows less deep before deepening again at a “critical”transducer-cylinder offset, such that the angle between thevertical and the outward normal to the cylinder surface isclose to the critical angle for total reflection (e.g., straightarrow in Fig. 4a).). The greatest shadow darkness in thesimulations occurs at this critical offset (Table 3). This may,in part, be due to the absence of absorption in the model,with the resulting critical angle discontinuity in the slope ofthe reflection coefficient at this offset. Because this criticaloffset moves away from the edge toward the cylinder mid-line with increasing positive SOS contrasts, the totalshadow width is larger for higher positive SOS contrasts(e.g., compare the shadow width on Fig. 2b with that on Fig.4a). It remains narrow, however, for the negative contrasts,where no critical angle exists.
The experimental expectation images show a nar-rower, and slightly darker, shadow in the negative contrastcases (Figs. 5c and d) than in the positive contrast cases(Figs. 5a and b), with the darkness increasing for the largerdiameter cylinder (Table 2). They do not, however, exhibitthe strong shadow at the critical offset observed in thepositive contrast simulations. The increased darkness of theexperimental negative SOS contrast cases (Table 2) could
Fig. 7. Experimental expectation B-mode image of �25% SOS12.5-mm diameter cylinder: (a) L7-4, (b) L12-5. Both images at
normal incidence.
Fig. 8. Experimental expectation B-mode image of 0% SOS12.5-mm diameter cylinder: (a) L7-4, (b) L12-5. Both images at
normal incidence.

Edge shadowing artefact ● R. STEEL et al. 1159
in part be due to these SOS fluids having a larger acousticimpedance contrast and larger absorptions (Table 1) thanthe positive SOS contrast fluids, relative to the TMM be-cause the density contrasts were almost all negative. Previ-ous studies have reached various conclusions on this issue.For example, Rubin et al. (1991b) considered positive andnegative shadows to be largely similar, but Robinson et al.(1981) found, in both of their phantoms, that the edgeshadowing for a cavity of lower SOS was less pronouncedthan that for a cavity of higher SOS. However, comparedwith Rubin et al. (1991b), who used �7.7% and �7.5%SOS fluids, Robinson and colleagues used �14.9% and�10%. They also used larger diameter cylinders, a lowerfrequency and, it seems, a significantly wider beam. Hykeset al. (1985) similarly say that lower SOS cavities produce“narrow-angle” shadows, whereas higher SOS cavities(their example was bone) produce “wide-angle“ shadows.To the extent that our simulation results are a valid guide tothe experimental beams used in these studies, they provideinsight into the conflicting observations. The higher�14.9% SOS used by Robinson et al. (1981) would resultin the critical angle shadow being displaced significantlyinward from the edge (compare our Figs. 2b and 4a for thiseffect). Thus, the final “edge” shadow, resulting from aspeckled combination of edge and critical angle shadows,would appear significantly broader than the shadow on their�10% case, which would have no critical angle compo-nent. In the case of Rubin et al. (1991b), however, the lower�7.7% SOS, combined with the smaller cylinder diameter(� 22 mm vs. 34 mm), would be insufficient to give a cleardisplacement between the edge and critical angle shadows.We would caution, however, that the different beams usedin these studies may affect the validity of these conclusions.
A related issue is the extent to which the shadowsdepend on the magnitude of the SOS contrast, rather than
Table 2. Experimental shadow echo level, at depth 1 mmbelow the base of the lumen image, expressed as an echo
amplitude ratio
SOS contrast, %
Shadow echolevel
Cylinder diameter, mmL7-4 L12-5
�9 0.71 0.73 12.5�13 0.52 0.51 12.5�25 0.53 0.45 12.5�9 0.61 – 30.0�4 0.71 – 30.0�6 0.40 – 30.0
�13 0.37 – 30.0
A ratio of 0.61 means that the echo amplitude at the darkest part ofthe shadow is 0.61 times the amplitude that would be received from thesame image depth in the absence of the cylindrical cavity.
simply its sign. Although the quantity of data is limited, the
simulation shadows appear to get slightly less dark fornegative SOS contrasts, as the magnitude of the contrastincreases, but darker for increasing positive contrasts (Table3). However, this dependence may be an artefact of the 2-Dnature of the simulations, which neglected scatterers lyingoutside the central plane through the US beam axis. Table2 suggests that the experimental shadows grow slightlydarker with increasing SOS contrast magnitude, for bothpositive and negative contrasts. Note also that the experi-mental SOS contrasts in Table 1 are for fresh fluids. Dif-fusion between the lumen fluid and the TMM caused rapidand significant changes in the SOS of both the fluid and theTMM. This is made evident, for example, in Fig. 7, wherethe fresh “�25%” fluid was used first to measure Fig. 7band then Fig. 7a. The increase in the fluid SOS during thesemeasurements resulted in the lumen appearing shorter inFig. 7a than in Fig. 7b.
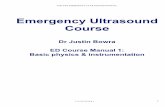
The simulation data provide some insight into thephysical processes responsible for the edge shadows. For ashadow to occur, either the pulse-echo sensitivity must havean unusually large spatial spread transverse to the propaga-tion direction, or part of the US beam energy must be withinthe cylinder lumen, which is devoid of scatterers, and so notcontributing to the echo. To investigate the former possi-bility, the spread of the simulated sensitivity was estimatedby calculating the smallest area of TMM that would yieldgreater than 75% of the total echo amplitude, with thiscalculated by including the scatter from all TMM. In allcases, it was found that images of the inverse square root ofthis sensitivity spread were qualitatively similar to the trueecho amplitude images, as plotted in the Results section.For example, Fig. 9 shows a cross-section through Fig. 2bat 1 mm below the base of the lumen, together with theidentical section taken from the image of the inverse squareroot spread. The agreement is good, except in the centre ofthe plot, which is believed to be an artefact of the 2-D natureof the simulations. The mechanism of this spreading wasstudied by plotting the advance of the sensitivity pulse,S(x,t), for a series of times, t. For incidence on the top
Table 3. Simulation shadow echo level, at depth 1 mm belowthe base of the lumen, expressed as an echo amplitude ratio
SOS contrast, %
Shadow echo level
6-mm diameter 12-mm diameter
�20 – 0.44 (0.30)�10 0.52 (0.48) 0.51 (0.43)�10 0.51 0.60�20 – 0.68
All values are for shadow minima under the edge (as shown, e.g., bycurved arrow in Fig. 4a), except bracketed values, which are thosedirectly beneath the critical angle (e.g., straight arrow in Fig. 4a).
surface of the cylinder at critical offsets just less than that

1160 Ultrasound in Medicine and Biology Volume 30, Number 9, 2004
corresponding to the critical angle (Figs. 2 and 4a), wherethe shadow is dark, this sensitivity pulse, S(x,t), after con-tacting the cylinder, appears to propagate a short distancearound the cylinder boundary, reradiating into the exteriormedium as it does so. This results in an unusually highspatial spread of the sensitivity distribution distal to thecylinder. During the interaction of the beam with the cyl-inder surface in this critical case, there appears to be sig-nificant US energy on both sides of the surface. For inci-dence at offsets nearer to the edge, the beam appears to bepredominantly reflected in the positive SOS case, with littlepenetration into the cylinder. For the negative SOS case,although the bulk of the energy seems to be reflected, asignificant amount is refracted through the cylinder. Al-though this large amplitude reflection, combined with thecylinder curvature, will usually produce high sensitivityspread, propagation of the beam a short distance around thecylinder boundary may also be contributing. Fully 3-Dsimulations will be required to state precisely how the USenergy is partitioned between the lumen and the exteriormedium, although this will depend, in part, on the relativeattenuations inside and outside the cylinder. One case whereincreased spatial sensitivity spread will not correspond to areduced echo is for “streak” type sensitivities (Steel andFish 2003), where the path of the pressure pulse reflectedfrom the cylinder boundary significantly overlaps that of theincident one, although this is unlikely to occur for in-sonation near to the transverse edges of the cylinder.
The temporary rise in the simulated shadow echoamplitude at a depth of about 24 mm in Fig. 4b, the �20%SOS case, is caused by the refracted pulse, within thecylinder, having suffered multiple reflections, emerging to
Fig. 9. Normalised echo amplitude from horizontal sectionthrough image of �10% SOS, 12-mm diameter cylinder, 1 mmbelow the base of the lumen. (—) B-mode amplitude, (----)
inverse square root of the sensitivity spread.
cross the incident beam very close to its focus. This causes
a relatively large amplitude sensitivity, with the scatterreturning direct to the transducer, rather than retraversingthe orbiting path in reverse.
The finding that the simulated �10% density-onlycontrast cylinder produces no significant edge shadowingis consistent with the theoretical and experimental find-ings of Bezuszka (1953) and Tamarkin (1949) for thefar-field and of Robinson and Greenleaf (1984, 1986) forthe near-field, who both found, for CW plane-wave in-cidence, that density contrasts disturb the scattered fieldless than SOS contrasts. This is understandable becauseit is the normal impedance mismatch, at the cylinderboundary, that determines the reflection coefficient and,thus, when there is no SOS contrast, the reflection coef-ficient is constant with angle of incidence and, in partic-ular, does not increase toward unity near the edge. Ourinability to show experimentally that a �9% density-only contrast cylinder had no edge shadows was possiblydue to a residual SOS contrast because exact and stableSOS-matching was not possible because of the signifi-cant temperature-dependence of the SOS, combined withthe rapid change of the SOS of both TMM and lumenfluid, when in contact, caused by diffusion. The shadow-forming role of a residual SOS contrast is supported bythe observation that the 0% SOS contrast glycerol solu-tion (Table 1) was shadow-free (Fig. 8), despite a densitycontrast of about 3%. In presenting the experimentalshadow images, we have assumed that it is the SOS,rather than the density, contrast that largely determinesthe shadow structure, despite the significant density con-trasts of many of the fluids in Table 1. There is alsoconsiderable variation in the absorptions of the SOSfluids used experimentally (Table 1) and in the simula-tions (zero absorption), the impact of which on the shad-ows we have not considered in detail. However, this doesexplain why the echo amplitude behind the cylinder inthe �13% case (Fig. 5c) is less than in the 0% case (Fig.8a), despite the anticipated extra enhancement due tofocussing, through the lumen, in the �13% case. It wasalso the very high absorption of glycerol that preventedits use as a �20% SOS contrast fluid.
We have not considered the effect on the edge shad-ows of the focal depth relative to the cylinder depth, al-though it is likely this will be significant. Rubin et al.(1991a, b) also commented on the importance of the focus-sing regimen used, and did experiments using both a singletransmit focal zone and multiple zones. They found that theedge shadowing, around fluid cylinders, was best seen intheir in vitro system when they used a single transmit focalzone, set at the level of the SOS contrast cylinder (the samefocal setting as we have used). The focal behaviour is justone of many beam parameters likely to have a significantimpact on the edge shadows. The beam simulated in this
study was different in many ways from the array beams
Edge shadowing artefact ● R. STEEL et al. 1161
used experimentally (e.g., dynamic vs. static receive focus-sing, different shaped apertures, different side and gratinglobe strengths, apodisations, pulse lengths and beamwidths). We do not yet have sufficient data to say whetherthe differences between the experimental and simulatedimages are due principally to these real beam differences, orif our model itself is deficient. Clarification of these issuesmust await experiments with transducers that match thesimulated beam more closely than in this initial study,together with a more comprehensive series of simulations.
In this paper, we have presented results for the sim-plest case of a fluid-filled circular-cylindrical cavity withSOS contrast. According to Jellins et al. (1977), structuressuch as cysts, particularly larger examples, can depart fromcircular symmetry, often appearing approximately ellipti-cal. The method we have used can be generalised to studythe shadows distal to such smooth noncircular geometriesusing the point-matching method employed by Thompsonet al. (2004) or the mode-matching method (Yasuura andIkuno 1971; Yamashita 1990), although we have found thecomputational burden to be very much higher using thesemethods. It would also be possible to incorporate a shearwave into the model, as in Steel and Fish (2003), to allowstudy of shadows distal to bone and to solid lesions, at leastthose with a relatively smooth outline, although Jellins et al.(1977) reported that the edge artefact is not often seen distalto solid lesions. Nevertheless, it can occur distal to bone(Kremkau 2002), fibroadenomas and some carcinomas(Solbiati and Rizzatto 1995), for example. Sector scanscould also be modelled with our method, although wewould expect the underlying cause of the edge artefact to bethe same in sector and rectilinear scans. Our simulationscould be modified relatively simply to use spherical, insteadof cylindrical, SOS contrast cavities, and to look at the edgeartefact in images of walled cavities, rather than simply ofcylinders and spheres, following up the suggestion of Zag-zebski (1989) that enhanced absorption in the cavity wall,when one exists, may sometimes contribute to the edgeshadow. Generalisation to multilayered cylinders may pro-vide insight into the recurrent shadowing on uterineleiomyomas (Caoili et al. 2000).
CONCLUSIONS
In this study, we have attempted to set out a frame-work, both theoretical and experimental, to yield a thoroughunderstanding of edge shadowing and its causes. Theoret-ically, we have shown how our existing model for scatter-ing from cylindrical cavities, insonated by a piston trans-ducer, may be combined with a simple model of tissuescatter, to provide simulated B-mode images of edge shad-ows. Our experimental protocol has provided very preciseimages of the shadow structure and permitted quantification
of the shadow darkness. It is clear, however, that the ap-pearance of shadowing artefacts is complex and dependssignificantly on a wide variety of both physical factors andinstrument settings, and that a general theoretical analysis iscorrespondingly difficult. We have demonstrated that edgeshadows on cylinders with positive SOS contrasts differ inboth structure and darkness from those with negative SOScontrasts, and we have presented data on the dependence ofthe shadow darkness on cylinder diameter and SOS contrastmagnitude. The realisation that the shadow geometry anddarkness depend on the acoustic properties of the tissues,rather than simply on their geometry, may enable tissueproperties in, for example, atherosclerotic arterial lesions, tobe discerned by studying the shadows that they cast. As aninitial step toward this goal, straightforward generalisationsof our model should provide insight into “edge” shadowsdistal to more complex geometries, such as those compris-ing walled cavities or multiple concentric tissue layers.
Acknowledgements—The authors thank Dr Peter Hoskins for hosting avisit to Edinburgh by R. Steel and for making available the experimen-tal facilities used in this study, including the precision positioningsystem, designed by Steven Hammer. This work was partly funded bythe Australian Research Council, and was supported by an award underthe Merit Allocation Scheme on the National Facility of the AustralianPartnership for Advanced Computing (APAC).
REFERENCES
Bailey JE, Bude RO, Tuthill T. US artifacts: Effects on out-of-plane USimages reconstructed from three-dimensional data sets. Radiology2001;218:592–597.
Bezuszka SJ. Scattering of underwater plane ultrasonic waves by liquidcylindrical obstacles. J Acoust Soc Am 1953;25:1090–1095.
Burckhardt CB. Speckle in ultrasound B-mode scans. IEEE TransSonics Ultrason 1978;25:1–6.
Caoili EM, Hertzberg BS, Kliewer MA, DeLong D, Bowie JD. Re-fractory shadowing from pelvic masses on sonography: A usefuldiagnostic sign for uterine leiomyomas. Am J Roentgenol 2000;174:97–101.
de Hoop AT. Reciprocity theorems for acoustic wave fields in fluid/solid configurations. J Acoust Soc Am 1990;87:1932–1937.
Filipczynski L, Kujawska T, Tymkiewicz R, Wojcik J. Amplitude,isobar and grey-scale imaging of ultrasonic shadows behind rigid,elastic and gaseous spheres. Ultrasound Med Biol 1996;22:261–270.
Foldy LL, Primakoff H. A general theory of passive linear elec-troacoustic transducers and the electroacoustic reciprocity theorem.I J Acoust Soc Am 1945;17:109–120.
Hammer SJ, Beech-Brandt J, Chen C, et al. Design and Developmentof a 3D Ultrasound Phantom Scanner. Proceedings of the IEEEEngineering in Medicine and Biology conference 2003;2:1184–1187.
Harpen MD. Partial wave analysis of the ultrasound comet tail artifact.Med Phys 2000;27:2072–2076.
Hykes DL, Hedrick WR, Starchman DE. Ultrasound physics and in-strumentation. New York: Churchill Livingstone, 1985.
Jellins J, Kossoff G, Reeve TS. Detection and classification of liquid-filled masses in the breast by gray scale echography. Radiology1977;125:205–212.
Kremkau FW. Diagnostic ultrasound: Principles and instruments. 6thed. Philadelphia: WB Saunders, 2002.
Lafollette PS, Ziskin MC. Geometric and intensity distortion in echog-
raphy. Ultrasound Med Biol 1986;12:953–963.
1162 Ultrasound in Medicine and Biology Volume 30, Number 9, 2004
Ramnarine KV, Anderson T, Hoskins PR. Construction and geometricstability of physiological flow rate wall-less stenosis phantoms.Ultrasound Med Biol 2001;27:245–250.
Robinson BS, Greenleaf JF. Measurement and simulation of scatteringof ultrasound by penetrable cylinders. In: Kaveh M, Mueller RK,eds. Acoustical imaging. New York: Plenum, 1984:351–363.
Robinson BS, Greenleaf JF. The scattering of ultrasound by cylin-ders—Implications for diffraction tomography. J Acoust Soc Am1986;80:40–49.
Robinson DE, Wilson LS, Kossoff G. Shadowing and enhancement inultrasonic echograms by reflection and refraction. J Clin Ultrasound1981;9:181–188.
Rubin JM, Adler RS, Bude RO, Fowlkes JB, Carson PL. Clean anddirty shadowing at US–A reappraisal. Radiology 1991a;181:231–236.
Rubin JM, Adler RS, Fowlkes JB, Carson PL. Phase cancellation—Acause of acoustical shadowing at the edges of curved surfaces inB-mode ultrasound images. Ultrasound Med Biol 1991b;17:85–95.
Solbiati L, Rizzatto G. Ultrasound of superficial structures. Edinburgh:Churchill Livingstone, 1995.
Sommer TG, Filly RA, Minton MJ. Acoustic shadowing due to refrac-tive and reflective effects. Am J Roentgenol 1979;132:973–977.
Steel R, Fish PJ. A simulation study of sample volume sensitivity foroblique pulsed finite beam insonation of Doppler ultrasound flowphantom cylindrical vessels. IEEE Trans Ultrason Ferroelec FreqControl 2003;50:58–67.
Tamarkin P. Scattering of an underwater ultrasonic beam from liquidcylindrical obstacles. J Acoust Soc Am 1949;21:612–616.
Thompson RS, Macaskill C, Fraser WB, Farnell L. Acoustic intensityfor a long vessel with non-circular cross-section. IEEE Trans Ul-trason Ferroelec Freq Control 2004;51:566–575.
Wagner RF, Smith SW, Sandrik JM, Lopez H. Statistics of speckle inultrasound B-scans. IEEE Trans Sonics Ultrason 1983;30:156–163.
Yamashita E. Analysis Methods for Electromagnetic Wave Problems.Norwood: Artech House, 1990.
Yasuura K, Ikuno H. On the modified Rayleigh hypothesis and themode-matching method. International symposium on antennas andpropagation, Sendai, Japan, 1971;173–174 . The Institute of Elec-tronics, Information and Communication Engineers.
Zagzebski JA. Images and Artifacts. In: Hagen-Ansert SL, ed. Text-book of Diagnostic Ultrasonography, 3rd ed. St Louis: The CVMosby Company, 1989.
Ziskin MC, Lafollette PS, Blathras K, Abraham V. Effect of ScanFormat on Refraction Artifacts. Ultrasound Med Biol 1990;16:183–191.
APPENDIX 1
We outline here the method used to solve for plane-wave inci-dence on a cylinder. We assume that the scalar displacement potential,�, everywhere satisfies the Helmholtz equation:
�2� � k2� � 0 (A1.1)
with
k ��
c, (A1.1a)
angular frequency, �, and sound speed, c, chosen appropriately foreach medium. We then use the separation of variables technique incylindrical polar coordinates, to express the solution to eqn (A1.1), forplane-wave incidence, as an infinite sum of partial waves:
� �
�in
J k r � g H(1) k r cos n � (A1.2)
out �n�0out� n� out � n n � out �� � � n
�in � �n�0
�
qnJn�kinr�cos �n��n (A1.3)
where
�n �P0
in�2�ni
nexp �ikzz i�t�, (A1.3a)
P0 is the incident pressure amplitude, �n is the Neumann factor, out andin are the densities of the incident medium and interior (cylinder)medium, respectively, kz � kout sin(�) is the real wave number alongthe cylinder axis, kout � koutcos(�) is the incident radial wave number,kout is the incident wave number, r is the cylindrical radial coordinate, is the azimuthal angle about the cylinder axis, kin � kin cos(��) is thelumen radial wave number, kin is the lumen wave number,
� � � arcsin kout
kinsin ���, (A1.3b)
� is the angle between the incident wave vector and the cylinder normal(e.g., � � 0 for normal incidence), Jn is the Bessel function and H n
(1)
is the outgoing Hankel function, both of order n. The partial wavecoefficients, gn and qn, in eqns (A1.2) and (A1.3) are found by enforc-ing equality of pressure and of radial displacement at the cylinderboundary. For all plane wave components used to construct the beam,it was verified that the computed scattered wave coefficients, gn of eqn(A1.2), satisfied the optical theorem, expressing energy conservation(Yamashita 1990), given here as
�n�0
�
�n�gn�2 � Im i�n�0
�
�ngn� 0, (A1.4)
where Im denotes the imaginary part.
APPENDIX 2
Based on the analysis of Wagner et al. (1983), we explain herehow the expectation pixel amplitudes from an ensemble of randomscatterer distributions can be evaluated using an integral involving thepulse-echo sensitivity. A single realisation of the complex, speckled,echo amplitude for a given pixel, E(t), is found by integrating theproduct of the sensitivity, S(x,t), with the spatial distribution of randomscatterer amplitudes, a(x), giving:
E(t) � � dx� a(x�)S(x�, t)e i�t. (A2.1)
It may be shown, using a 2-D random walk, that |E(t)| is Ray-leigh-distributed (Burckhardt 1978). It therefore follows, from theproperties of the Rayleigh distribution, that the echo magnitude expec-tation, �|E(t)|, is proportional to the root-mean-square echo amplitude,
���E(t)�2� (A2.1a)
From eqn (A2.1), we have:
���E�t��2� � �� dx�dz� S�x�, t�S * �z�, t��a�x��a * �z���
���2� �S�x�, t��2dx�, (A2.2)
where we have used our earlier assumption that a(x) is �-correlatedspatially, with �2 �a(x)a*(x), and the asterisk denotes complex
conjugation.