
Nonlinear adaptive task space control for a 2DOF redundantly actuated parallel manipulator
Upload
independentCategory
view
0download
0
Mechatronics 16 (2006) 577–587
Technical note
Nonlinear PID control to improve the control performance of2 axes pneumatic artificial muscle manipulator using neural network
TU Diep Cong Thanh, Kyoung Kwan Ahn *
School of Mechanical and Automotive Engineering, University of Ulsan, San 29, Muger 2dong, Nam-gu, Ulsan, 680-764, Republic of Korea
Received 6 June 2005; accepted 14 March 2006
Abstract
The application of a robot to rehabilitation has become a matter of great concern because of the requirement of functional recoverytherapy of arm or limb. A novel pneumatic artificial muscle (PAM) actuator which has achieved increased popularity to provide theinherent safety and mobility assistance to humans performing tasks and another advantages such as high strength and power/weightratio, low cost, compactness, ease of maintenance, cleanliness, readily available and cheap power source and so on. However, the com-plex nonlinear dynamics of the PAM manipulator makes it a challenging and appealing system for modeling and control design. Theproblems with the time variance, compliance, high hysteresis and nonlinearity of pneumatic systems have made it difficult to realize pre-cise position control. In order to realize satisfactory control performance, the effect of nonlinear factors contained in the PAM manip-ulator must be considered.
The purpose of this study is to improve the control performance of 2 axes PAM manipulator using a nonlinear PID controller. Superbmixture of conventional PID controller and the neural network, which has powerful capability of learning, adaptation and tackling non-linearity, brings us a novel nonlinear PID controller using neural network. This proposed controller is appropriate for a kind of plantswith nonlinearity uncertainties and disturbances. The experiments were carried out in practical 2 axes PAM manipulator and the effec-tiveness of the proposed control algorithm was demonstrated through the experiments, which suggests its superior performance and dis-turbance rejection.� 2006 Elsevier Ltd. All rights reserved.
Keywords: Pneumatic artificial muscle; Neural network; Nonlinear PID control; Manipulator
1. Introduction
The number of humans requiring rehabilitation due tofracture of a bone and joint disease caused by traffic acci-dents and cerebral apoplexy or functional problems inmotion due to advanced age, reaches several hundreds ofthousands all over the world. Thus, the application of arobot to rehabilitation has become a matter of greatconcern. Functional recovery therapy of rehabilitation isnormally carried out by medical therapists on a person-to-person basis, but automatic equipment has been put tothe practical use in physical therapy programs that repeat
0957-4158/$ - see front matter � 2006 Elsevier Ltd. All rights reserved.
doi:10.1016/j.mechatronics.2006.03.011
* Corresponding author. Tel.: +82 52 222 1404; fax: +82 52 259 1680.E-mail address: [email protected] (K.K. Ahn).
relatively simple operations, such as a continuous passivemotion machine, a walking training device, or a torquemachine used for a single axis [1–3].
This research deals with functional recovery therapy,one important aspect of physical rehabilitation. Single-joint therapy machine has already been achieved [4–6].However, for more efficient therapy, multi-joint robotsare necessary in order to achieve more realistic motion pat-terns. This kind of robot must have a high level of safetyfor humans. Thus, the PAM manipulator has been appliedto construct a therapy robot with two degrees of freedom(DOF). For example, 2-DOF robot for functional recoverytherapy driven by pneumatic muscle was developed byZobel [7], and Raparelli [8,9], artificial muscle actuatorsfor biorobotic systems by Klute [10–13], and a pneumatic
578 T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587
muscle hand therapy device by Koeneman [14]. However,the problems with the time variance, compliance, hysteresisand nonlinearity of pneumatic systems have made it diffi-cult to realize precise position control with high speed.For widespread use of these actuators in the field of manip-ulators, it is necessary to realize precise position controlwith various input frequencies and without regard to thenonlinearity of the PAM manipulator.
In order to realize satisfactory control performance,many control strategies have been proposed to handle theeffect of nonlinear factor contained in the PAM manipula-tor. The complex nonlinear dynamics of the PAM manip-ulator made it a challenging and appealing system formodeling and control design. Among previous approaches,Repperger and his team had handled the nonlinear factorwith a nonlinear feedback controller using a gain schedul-ing method [15]. The goal of his study was to have the con-troller also switch between the inflation dynamics and thedeflation dynamics of the PAM manipulator. With a gainscheduling method, it had been implemented and shownto be able to reproduce reasonable dynamics when the ori-ginal system had dynamics which were very difficult to deal
Fig. 1. Schematic diagram of 2 axes pne
with. Having tested a feed forward – PID regulator, Cald-well and his team were turning to develop an adaptive con-troller for the PAM manipulator, which was based on theon-line identification of a model with five parameters andthree time delays. And the position regulation performanceof the joints of their arm prototype was better than ±0.5�[16–20]. Other possible approaches were sliding-modecontrol [21–23], H infinitive control [24] and variable struc-ture control [25]. The fine control performance could beobtained by using some control strategies of a sliding-modecontrol, an adaptive control and so on. However, these sys-tems were based on the assumption that the process to becontrolled should be linear and the research results are justconsidered with step reference input.
Furthermore, the intelligent control techniques haveemerged to overcome some deficiencies in conventionalcontrol methods in dealing with complex real-worldsystems in more recent years. These problems includeknowledge adaptation, learning and expert knowledgeincorporation. Balasubramanian and Rattan had proposedfeed-forward control of a nonlinear pneumatic muscle sys-tem using fuzzy logic [26]. A fuzzy inverse dynamics con-
umatic artificial muscle manipulator.

Table 1Specification of PAM
Specifications Values
Internal diameter (mm) 10Nominal length (mm) 220Max. additional load (kg) 30Max. permissible contraction 25% of nominal lengthMax. hysteresis <3% of nominal lengthOperating pressure (bar) 4
Fig. 2. Structure of the pneumatic artificial muscle.
1θ
2θ
Fig. 3. Working principle of the pneumatic artificial muscle manipulator.
T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587 579
troller for a pneumatic system was designed and tested forthe trajectory tracking capability. Fuzzy controllers havebeen successfully implemented for many linear and nonlin-ear processes. However, there were obviously steady-stateerror, and also it was very difficult to implement in practicebecause of the difficulty in constructing control rule’s bases.In addition, neural network control has been successfullyused in many commercial and industrial applications inrecent years. A Kohonen-type neural network was usedfor the position control of robot end-effector within 1 cmafter learning [27]. Recently, the authors have developeda feed forward neural network controller, where joint angleand pressure of each chamber of pneumatic muscle wereused as learning data and accurate trajectory followingwas obtained, with an error of 1� [28]. An intelligent con-trol using a neuro-fuzzy network was proposed by Iskarousand Kawamura [29]. A hybrid network that combinesfuzzy and neural network was used to model and controlcomplex dynamic systems, such as the PAM system. Anadaptive controller based on the neural network wasapplied to the artificial hand, which was composed of thePAM [30]. Here, the neural network was used as a control-ler, which had the form of inverse of the model and it wasnot easy to apply these control algorithms to the PAMmanipulator with high hysteresis, which is not modeled inthe nonlinear inverse.
In addition, PID control is a very popular control strat-egy in industry due to its simple structure, easy tuning,cheap and excellent performance. However, the conven-tional PID is difficult to determine the appropriate PIDgains in case of nonlinear and unknown controlled plants.Superb mixture of conventional PID controller and theneural network, which has powerful capability of learning,adaptation and tackling nonlinearity, brings us a novelnonlinear PID controller using neural network. The pro-posed controller is appropriate for a kind of plants withnonlinearity uncertainties and disturbances.
In this paper, a nonlinear PID controller is newly pro-posed in order to improve the control performance of thePAM manipulator. Two link of the PAM manipulator isfabricated and the effectiveness of the proposed controlalgorithm is demonstrated through the experiments, whichsuggests its superior performance and disturbancerejection.
2. Experimental setup
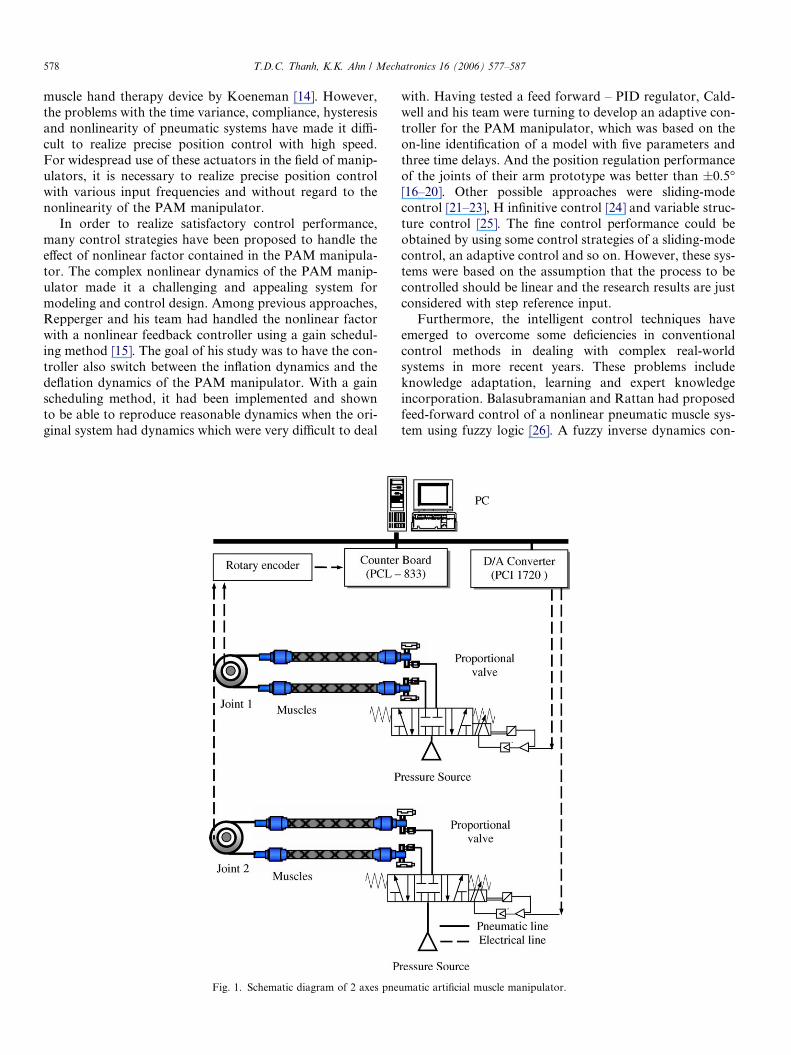
The schematic diagram of 2 axes pneumatic artificialmuscle manipulator is shown in Fig. 1. The hardwareincludes an IBM-compatible personal computer (Pentium1 GHz), which calculated the control input and controlledthe proportional valve (FESTO, MPYE-5-1/8HF-710 B)through D/A board (Advantech, PCI 1720), and twopneumatic artificial muscles (FESTO, MAS-10-N-220-AA-MCFK). The detail specification and structure ofpneumatic artificial muscle are shown in Table 1 andFig. 2, respectively. The rotating torque is generated by
the pressure difference between the antagonist artificialmuscles and the external load is rotated as a result in
PAM
Proportional Valve
Rotary Encoder Joint 1
Rotary Encoder Joint 2
Proportional Valve
Joint 1Joint 2
PAM
Fig. 4. Photograph of the experimental apparatus.
θr(k)Nonlinear
PIDcontroller
using neural network
PAMmanipulator
+
-
θ(k)1−
Δz
T
+ -ep(k)
ei(k)
ed(k)
T
z
Δ− −11
u(k)
Fig. 5. Structure of the nonlinear PID controller using neural network.
580 T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587
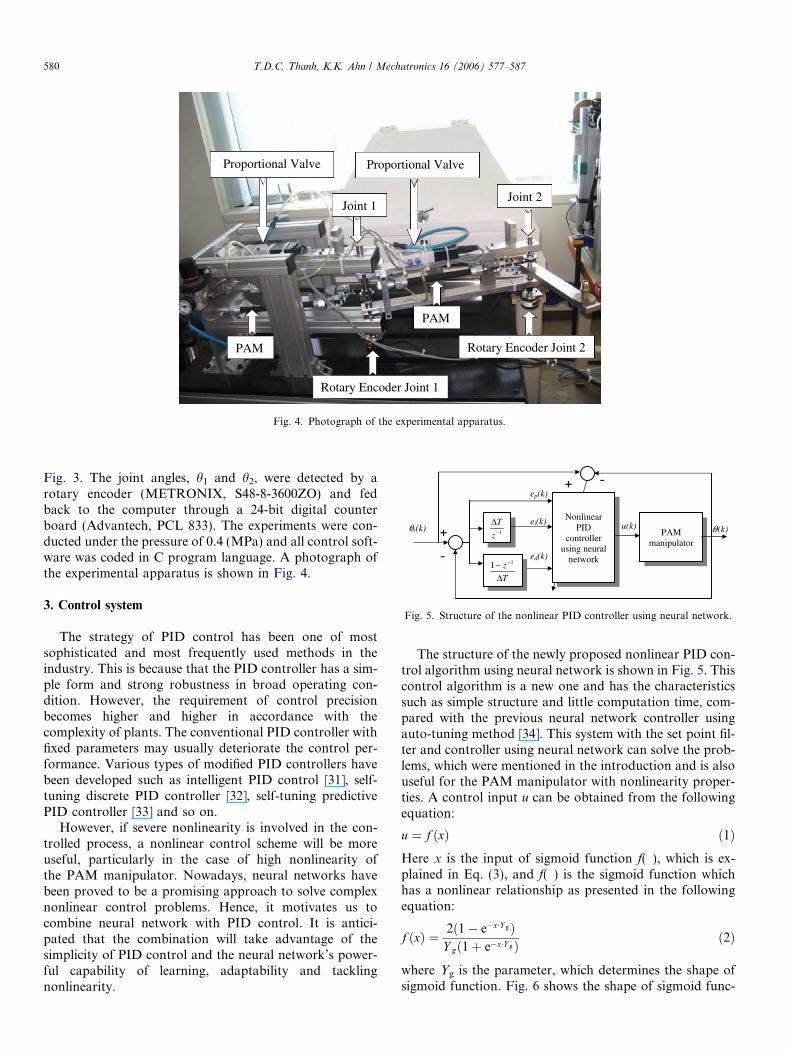
Fig. 3. The joint angles, h1 and h2, were detected by arotary encoder (METRONIX, S48-8-3600ZO) and fedback to the computer through a 24-bit digital counterboard (Advantech, PCL 833). The experiments were con-ducted under the pressure of 0.4 (MPa) and all control soft-ware was coded in C program language. A photograph ofthe experimental apparatus is shown in Fig. 4.
3. Control system
The strategy of PID control has been one of mostsophisticated and most frequently used methods in theindustry. This is because that the PID controller has a sim-ple form and strong robustness in broad operating con-dition. However, the requirement of control precisionbecomes higher and higher in accordance with thecomplexity of plants. The conventional PID controller withfixed parameters may usually deteriorate the control per-formance. Various types of modified PID controllers havebeen developed such as intelligent PID control [31], self-tuning discrete PID controller [32], self-tuning predictivePID controller [33] and so on.
However, if severe nonlinearity is involved in the con-trolled process, a nonlinear control scheme will be moreuseful, particularly in the case of high nonlinearity ofthe PAM manipulator. Nowadays, neural networks havebeen proved to be a promising approach to solve complexnonlinear control problems. Hence, it motivates us tocombine neural network with PID control. It is antici-pated that the combination will take advantage of thesimplicity of PID control and the neural network’s power-ful capability of learning, adaptability and tacklingnonlinearity.
The structure of the newly proposed nonlinear PID con-trol algorithm using neural network is shown in Fig. 5. Thiscontrol algorithm is a new one and has the characteristicssuch as simple structure and little computation time, com-pared with the previous neural network controller usingauto-tuning method [34]. This system with the set point fil-ter and controller using neural network can solve the prob-lems, which were mentioned in the introduction and is alsouseful for the PAM manipulator with nonlinearity proper-ties. A control input u can be obtained from the followingequation:
u ¼ f ðxÞ ð1ÞHere x is the input of sigmoid function f( Æ ), which is ex-plained in Eq. (3), and f( Æ ) is the sigmoid function whichhas a nonlinear relationship as presented in the followingequation:
f ðxÞ ¼ 2ð1� e�x�Y gÞY gð1þ e�x�Y gÞ ð2Þ
where Yg is the parameter, which determines the shape ofsigmoid function. Fig. 6 shows the shape of sigmoid func-
-20 -10 0 10 20
-9
-6
-3
0
3
6
9
Yg=1
Yg=0.8Yg=0.6
Yg=0.4
Yg=0.2
y
x
Fig. 6. The sigmoid function shapes.
T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587 581
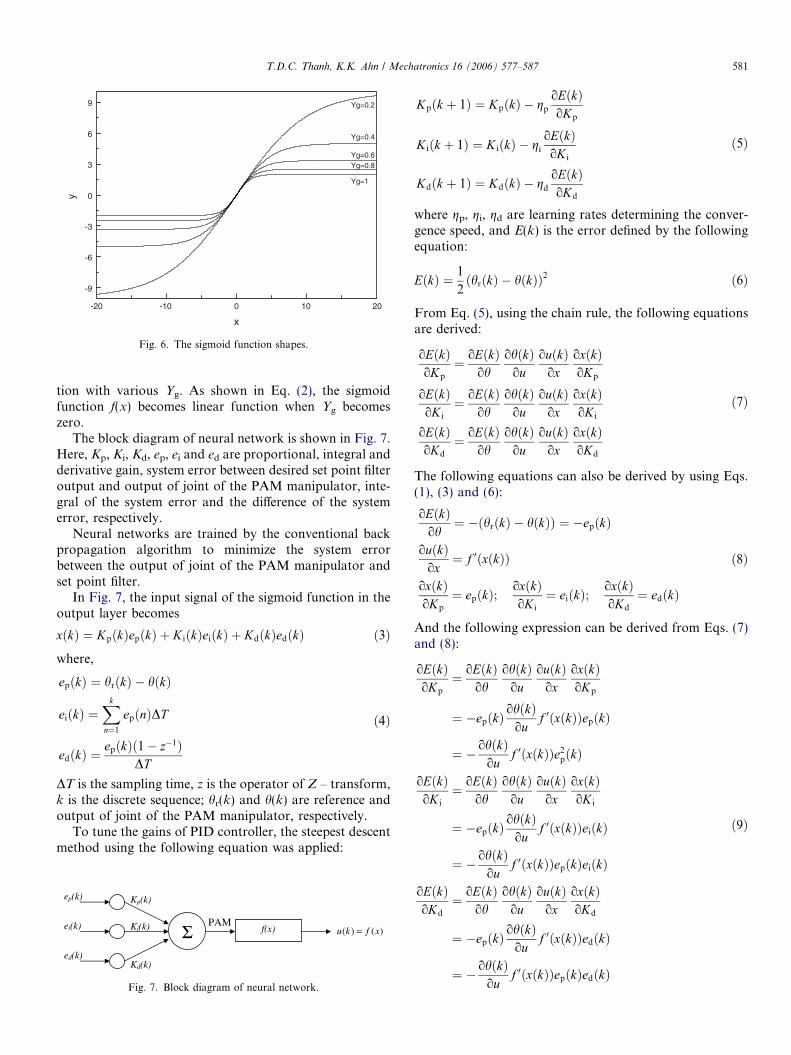
tion with various Yg. As shown in Eq. (2), the sigmoidfunction f(x) becomes linear function when Yg becomeszero.
The block diagram of neural network is shown in Fig. 7.Here, Kp, Ki, Kd, ep, ei and ed are proportional, integral andderivative gain, system error between desired set point filteroutput and output of joint of the PAM manipulator, inte-gral of the system error and the difference of the systemerror, respectively.
Neural networks are trained by the conventional backpropagation algorithm to minimize the system errorbetween the output of joint of the PAM manipulator andset point filter.
In Fig. 7, the input signal of the sigmoid function in theoutput layer becomes
xðkÞ ¼ KpðkÞepðkÞ þ K iðkÞeiðkÞ þ KdðkÞedðkÞ ð3Þwhere,
epðkÞ ¼ hrðkÞ � hðkÞ
eiðkÞ ¼Xk
n¼1
epðnÞDT
edðkÞ ¼epðkÞð1� z�1Þ
DT
ð4Þ
DT is the sampling time, z is the operator of Z – transform,k is the discrete sequence; hr(k) and h(k) are reference andoutput of joint of the PAM manipulator, respectively.
To tune the gains of PID controller, the steepest descentmethod using the following equation was applied:
ep(k)
ei(k)
ed(k)
Σ
Kp(k)
Kd(k)
Ki(k) f(x) )()( xfku =PAM
Fig. 7. Block diagram of neural network.
Kpðk þ 1Þ ¼ KpðkÞ � gp
oEðkÞoKp
K iðk þ 1Þ ¼ K iðkÞ � gi
oEðkÞoK i
Kdðk þ 1Þ ¼ KdðkÞ � gd
oEðkÞoKd
ð5Þ
where gp, gi, gd are learning rates determining the conver-gence speed, and E(k) is the error defined by the followingequation:
EðkÞ ¼ 1
2ðhrðkÞ � hðkÞÞ2 ð6Þ
From Eq. (5), using the chain rule, the following equationsare derived:
oEðkÞoKp
¼ oEðkÞoh
ohðkÞou
ouðkÞox
oxðkÞoKp
oEðkÞoK i
¼ oEðkÞoh
ohðkÞou
ouðkÞox
oxðkÞoK i
oEðkÞoKd
¼ oEðkÞoh
ohðkÞou
ouðkÞox
oxðkÞoKd
ð7Þ
The following equations can also be derived by using Eqs.(1), (3) and (6):
oEðkÞoh¼ �ðhrðkÞ � hðkÞÞ ¼ �epðkÞ
ouðkÞox¼ f 0ðxðkÞÞ
oxðkÞoKp
¼ epðkÞ;oxðkÞoK i
¼ eiðkÞ;oxðkÞoKd
¼ edðkÞ
ð8Þ
And the following expression can be derived from Eqs. (7)and (8):
oEðkÞoKp
¼ oEðkÞoh
ohðkÞou
ouðkÞox
oxðkÞoKp
¼ �epðkÞohðkÞou
f 0ðxðkÞÞepðkÞ
¼ � ohðkÞou
f 0ðxðkÞÞe2pðkÞ
oEðkÞoK i
¼ oEðkÞoh
ohðkÞou
ouðkÞox
oxðkÞoK i
¼ �epðkÞohðkÞou
f 0ðxðkÞÞeiðkÞ
¼ � ohðkÞou
f 0ðxðkÞÞepðkÞeiðkÞ
oEðkÞoKd
¼ oEðkÞoh
ohðkÞou
ouðkÞox
oxðkÞoKd
¼ �epðkÞohðkÞou
f 0ðxðkÞÞedðkÞ
¼ � ohðkÞou
f 0ðxðkÞÞepðkÞedðkÞ
ð9Þ

582 T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587
and
f 0ðxÞ ¼ 4e�x�Y g
ð1þ e�x�Y gÞ2ð10Þ
As done by Yamada and Yabuta [34], for convenience,ohðkÞou ¼ 1 is assumed. Then Eq. (5) is expressed as follows:
0 10 20 30 40 50 60
-20
-10
0
10
20
θ 1[o ]
Time [s]
Joint 1 Reference f=0.05Hz PID Controller
0 10 20 30
-20
-10
0
10
20
θ 1[o ]
Time [s]
Joint 1 Reference f=0.1Hz PID Controller
0 10 15
-20
-10
0
10
20
θ 1[o ]
Time [s]
Joint 1 Reference f=0.2Hz PID Controller
5
Fig. 8. Comparison of tracking performance when the frequency
Kpðk þ 1Þ ¼ KpðkÞ þ gpepðkÞepðkÞ4e�x�Y g
ð1þ e�x�Y gÞ2
K iðk þ 1Þ ¼ K iðkÞ þ giepðkÞeiðkÞ4e�x�Y g
ð1þ e�x�Y gÞ2
Kdðk þ 1Þ ¼ KdðkÞ þ gdepðkÞedðkÞ4e�x�Y g
ð1þ e�x�Y gÞ2
ð11Þ
0 10 20 30 40 50 60-20
-15
-10
-5
0
5
10
15
20
θ 2[o ]
Time [s]
Joint 2 Reference f=0.05Hz PID Controller
0 10 20 30-20
-15
-10
-5
0
5
10
15
20
θ 2[o ]
Time [s]
Joint 2 Reference f=0.1Hz PID Controller
0 10 15-20
-15
-10
-5
0
5
10
15
20
θ 2[o ]
Time [s]
Joint 2 Reference f=0.2Hz PID Controller
5
of reference trajectory changes from 0.05 (Hz) to 0.2 (Hz).

0 10 20 30 40 50 60-20
-15
-10
-5
0
5
10
15
20
θ 2 [o ]
Time [s]
Joint 2 Reference f=0.05Hz PID Controller Proposed Controller
Fig. 10. Comparison between conventional PID controller and nonlinearPID controller using neural network (Joint 2, frequency of referencef = 0.05 Hz).
-20-10
01020
Joint Angle
Reference
θ 1 [o ]
4.5
5.0
5.5
Con
trol
Inpu
t
3 Proposed Controller
T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587 583
The effectiveness of the proposed nonlinear PID controlwith tuning algorithm of Kp, Ki and Kd will be demon-strated through experiments of position control.
4. Experimental results
Experiments were carried out with respect to 3 cases ofsinusoidal waveforms as reference input with 3 differentdriving frequencies (f = 0.05 Hz, 0.1 Hz and 0.2 Hz) andthe comparisons of control performance between the con-ventional PID and the proposed nonlinear PID controllerwere performed.
Fig. 8 shows the experimental results of conventionalPID controller with respect to the various frequencies ofreference input, where the parameters of PID controllerwere set to be Kp = 50 · 10�6, Ki = 1 · 10�6, Kd = 0.5 ·10�6 for Joint 1 and Kp = 100 · 10�6, Ki = 10 · 10�6,Kd = 5 · 10�6 for Joint 2. The parameters of PID control-ler were obtained by trial-and-error through experiments.
From Fig. 8, it was understood that there were a largetracking error and time delay according to the increase ofdriving frequencies of reference input.
First, the experiments were carried out to verify theeffectiveness of the proposed nonlinear PID controllerusing neural network when the frequency of reference inputwas 0.05 Hz. Figs. 9 and 10 show the experimental resultsbetween the conventional PID controller and the proposednonlinear PID controller with respect to Joints 1 and 2, andthe updating of each control parameter (Kp, Ki and Kd) wasshown in Figs. 11 and 12, respectively. In the experiment ofthe proposed nonlinear PID controller, the initial values ofKp, Ki and Kd are set to be the same as that of conventionalPID controller. The purpose of the experiment is to showthe effectiveness of the adaptability of the proposed nonlin-
0 10 20 30 40 60
-20
-10
0
10
20
θ 1 [o ]
Time [s]
Joint 1 Reference f=0.05Hz PID Controller Proposed Controller
50
Fig. 9. Comparison between conventional PID controller and nonlinearPID controller using neural network (Joint 1, frequency of referencef = 0.05 Hz).
1.50x10-4
3.00x10-4
4.50x10-4
Kp
0.0
5.0x10-5
1.0x10-4
Ki
0 10 20 30 40 50 60
0.0
1.0x10-4
2.0x10-4
Time [s]
Kd
-2
-1
0
1
2 PID Controller
Err
or
Fig. 11. Experimental results of nonlinear PID controller using neuralnetwork (Joint 1, frequency of reference f = 0.05 Hz).
ear PID controller. In the experiment, we set the learningrates to be gp = 8 · 10�9, gi = 8 · 10�9, gd = 15 · 10�9 for
-20-10
01020
Joint Angle Reference
θ 2 [o ]
4.64.85.05.25.4
Con
trol
Inpu
t
1.50x10-4
3.00x10-4
4.50x10-4
Kp
2.0x10-5
4.0x10-5
6.0x10-5
Ki
0 10 20 30 40 50 604.0x10-4
6.0x10-4
8.0x10-4
1.0x10-3
Time [s]
Kd
-3
0
3
6
9 Proposed Controller PID Controller
Err
or
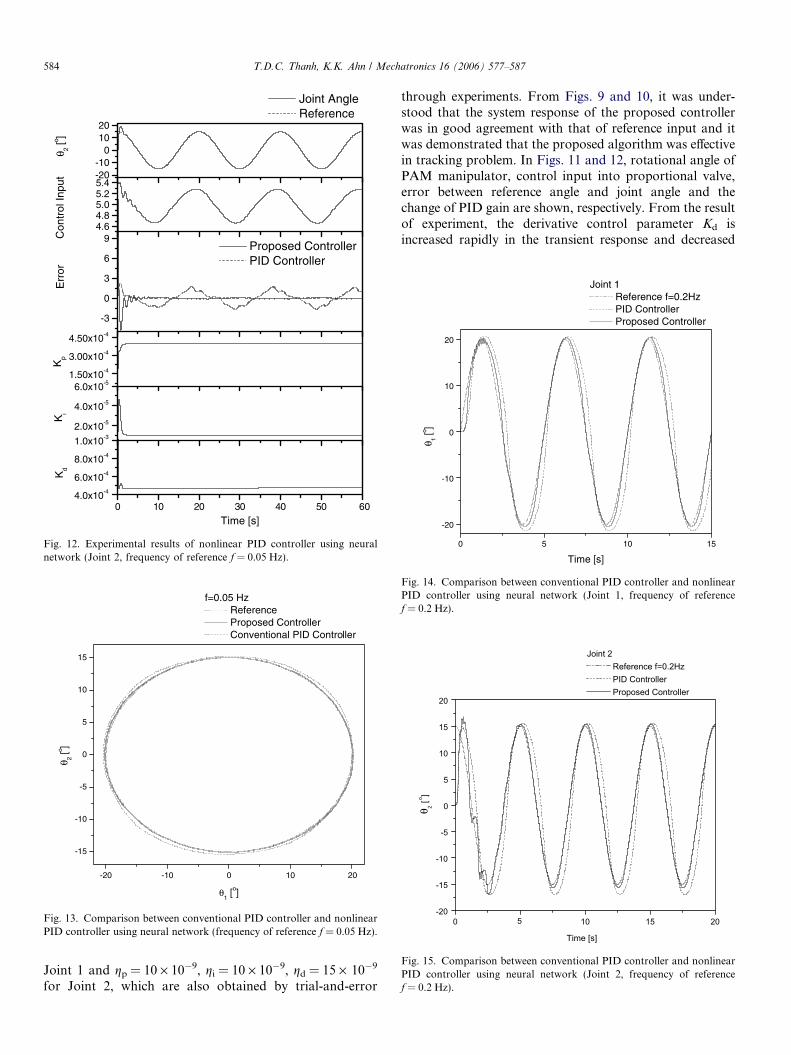
Fig. 12. Experimental results of nonlinear PID controller using neuralnetwork (Joint 2, frequency of reference f = 0.05 Hz).
-20 -10 0 10 20
-15
-10
-5
0
5
10
15
θ 2 [o ]
θ1 [o]
f=0.05 Hz Reference Proposed Controller Conventional PID Controller
Fig. 13. Comparison between conventional PID controller and nonlinearPID controller using neural network (frequency of reference f = 0.05 Hz).
0 5 10 15
-20
-10
0
10
20
θ 1 [o ]
Time [s]
Joint 1 Reference f=0.2Hz PID Controller Proposed Controller
Fig. 14. Comparison between conventional PID controller and nonlinearPID controller using neural network (Joint 1, frequency of referencef = 0.2 Hz).
0 10 15 20-20
-15
-10
-5
0
5
10
15
20
θ 2 [o ]
Time [s]
Joint 2 Reference f=0.2Hz PID Controller Proposed Controller
5
Fig. 15. Comparison between conventional PID controller and nonlinearPID controller using neural network (Joint 2, frequency of referencef = 0.2 Hz).
584 T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587
Joint 1 and gp = 10 · 10�9, gi = 10 · 10�9, gd = 15 · 10�9
for Joint 2, which are also obtained by trial-and-error
through experiments. From Figs. 9 and 10, it was under-stood that the system response of the proposed controllerwas in good agreement with that of reference input and itwas demonstrated that the proposed algorithm was effectivein tracking problem. In Figs. 11 and 12, rotational angle ofPAM manipulator, control input into proportional valve,error between reference angle and joint angle and thechange of PID gain are shown, respectively. From the resultof experiment, the derivative control parameter Kd isincreased rapidly in the transient response and decreased

-20-10
01020
Joint Angle Reference
θ 1 [o ]
4.24.44.64.85.05.25.45.6
Con
trol
Inpu
t
2.50x10-45.00x10-47.50x10-41.00x10-3
Kp
0.0
5.0x10-5
Ki
0 10 20 30 40 50 60
0.0
1.0x10-4
2.0x10-4
Time [s]
Kd
-10
-5
0
5
10
15 Proposed Controller PID Controller
Err
or
Fig. 16. Experimental results of nonlinear PID controller using neuralnetwork (Joint 1, frequency of reference f = 0.2 Hz).
25
-20-10
01020
Joint Angle Reference
θ 2 [o ]
4.64.85.05.25.4
Con
trol
Inpu
t
3.0x10-4
6.0x10-4
9.0x10-4
Kp
2.0x10-5
4.0x10-5
6.0x10-5
8.0x10-5
Ki
0 10 20 30 40 50 607.0x10-4
8.0x10-4
9.0x10-4
1.0x10-3
Time [s]
Kd
-6-30369
1215
Proposed Controller PID Controller
Err
or
Fig. 17. Experimental results of nonlinear PID controller using neuralnetwork (Joint 2, frequency of reference f = 0.2 Hz).
-20 -10 0 10 20-20
-15
-10
-5
0
5
10
15
20
θ 2 [o ]
θ1 [o]
f=0.2 Hz Reference Proposed Controller Conventional PID Controller
Fig. 18. Comparison between conventional PID controller and nonlinearPID controller using neural network (frequency of reference f = 0.2 Hz).
T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587 585
after the end of rising time. Also the proposed nonlinearPID controller is verified to be very effective from the errorgraph (third row at Figs. 11 and 12). In Fig. 13, comparisonbetween conventional PID controller and the proposed non-linear PID controller using neural network was performedwith respect to two-dimensional ellipsoidal trajectory. Fromthe experimental results, the response of the proposed con-troller is in good agreement with that of reference.
Next, experiments were carried out to investigate thecontrol performance when the driving frequency of refer-ence input is 0.2 Hz. Figs. 14 and 15 show the comparisonof the performance of position control between the conven-tional PID controller and the proposed nonlinear PID con-troller. From the results of tracking error, it is understoodthat the control performance of the proposed nonlinearPID controller is superior to that of conventional PID con-troller. The updating of PID gain is shown in Figs. 16 and17, respectively. The effectiveness of the proposed nonlin-ear PID controller with respect to the change of drivingfrequencies was also verified by the above experiments.Fig. 18 shows the tracking performance of 2 axes PAMmanipulator with ellipsoid reference when the drivingfrequency of reference input is 0.2 Hz.
From the experimental results above, the proposed non-linear PID controller using neural network was verified tobe very effective in the control of 2 axes PAM manipulator
and showed the adaptability of PID gain tuning to mini-mize the position control performance.

586 T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587
5. Conclusions
A nonlinear PID control using neural network was pro-posed in this study. It has shown that the proposed methodhad a good control performance for the nonlinear system,such as the PAM manipulator. The controller had an adap-tive control capability and the control parameters wereoptimized via the back propagation algorithm. The con-troller designed by this method does not need any trainingprocedure in advance, but it uses only the input and outputof the plant for the adaptation of control parameter andcan tune the parameters iteratively.
From the experiments of the position control of thePAM manipulator, it was verified that the proposed con-trol algorithm presented in this study was online controlwith simple structure and had better dynamic property,strong robustness and it was suitable for the control of var-ious plants, including linear and nonlinear process, com-pared to the conventional PID controller.
The results show that the proposed nonlinear PID con-troller using neural network is one of effective methods todevelop a practically available human friendly robot byusing the PAM manipulator.
Acknowledgement
This work was partly supported by the University ofUlsan Research Fund 2006 at University of Ulsan.
References
[1] Doi Y. Exercise apparatus for restoration of function. J Soc Biomech1993;17(2):99–105.
[2] Fujie MG, Tani T, Hirano K, Yoshida T, Wada N. Walkingrehabilitation system for the elderly. In: Proceedings of the IEEEinternational conference on advanced robotic systems, 3, 1994. p.1655–62.
[3] Fujie MG, Tani T, Hirano K, Yoshida T, Wada N. Improvement ofwalking rehabilitation system for elderly. In: Proceedings of the IEEEinternational conference on robotics and automation, 3, 1995. p. 32–9.
[4] Ahn KK, Thanh TDC. Improvement of the control performance ofpneumatic artificial muscle manipulators using an intelligent switch-ing control method. KSME Int J 2004;8(8):1388–400.
[5] Ahn KK, Thanh TDC. Nonlinear PID control to improve the controlperformance of PAM manipulators using neural network. KSME IntJ 2005;19(1):106–15.
[6] Ahn KK, Thanh TDC, Ahn YK. Performance improvement of PAMmanipulators using Magneto-rheological brake. KSME Int J2005;19(3):777–90.
[7] Zobel PB, Durante F, Raparelli T. The experience of the Universityof L’Aquila on the pneumatic muscle actuators for a 2 DOFmanipulator for function recovery therapy. Seminar on Biomech-anics, Warsaw, Poland, 1999.
[8] Raparelli T, Zobel PB, Durante F. The design of a 2 DOF robot forfunctional recovery therapy driven by pneumatic muscles. Interna-tional workshop on robotics in ALPA – DRIA – DANUBE region,2001.
[9] Raparelli T, Zobel PB, Durante F. Development of a robot driven bypneumatic muscles. In: Proceeding of the RAAD, workshop onrobotics in ALPA – DRIA – DANUBE region, 2003.
[10] Klute GK, Czerniecki JM, Hannaford B. Artificial muscles: actuatorsfor biorobotic systems. Int J Robotics Res 2002;21(4):295–309.
[11] Klute GK, Czerniecki J, Hannaford B. McKibben artificial muscles:actuators with biomechanical intelligence. In: Proceedings of theIEEE/ASME international conference on advanced intelligent mech-atronics, 1999. p. 221–6.
[12] Klute GK, Czerniecki J, Hannaford B. Artificial tendons: biome-chanical properties for prosthetic lower limbs. In: Proceedings of theIEEE international conference on medical physics and biomedicalengineering, 3, 2000. p. 1972–75.
[13] Klute GK, Czerniecki J, Hannaford B. Muscle-like pneumaticactuators for below-knee prostheses. In: Proceedings of the interna-tional conference on new actuators, 2003. p. 289–92.
[14] Koeneman EJ, Schultz RS, Wolf SL, Herring DE, Koeneman JB. Apneumatic muscle hand therapy device. In: Proc IEEE/EMBSinternational conference, 2004. p. 2711–3.
[15] Repperger DW, Johnson KR, Phillips CA. Nonlinear feedbackcontroller design of a pneumatic muscle actuator system. In: ProcAmerican control conference, 3, 1999. p. 1525–9.
[16] Caldwell DG, Medrano-Cerda GA, Goodwin MJ. Braided pneumaticactuator control of a multi-jointed manipulator. In: Proc IEEEinternational conference on systems, man and cybernetics, LeTouque, France, 1993. p. 423–8.
[17] Caldwell DG, Medrano-Cerda GA, Goodwin MJ. Control ofpneumatic muscle actuators. IEEE Contol Syst Mag 1995;15(1):40–8.
[18] Caldwell DG, Medrano-Cerda GA, Goodwin MJ. Characteristicsand adaptive control of pneumatic muscle actuators for a roboticelbow. In: Proceedings of the IEEE international conference onrobotics and automation, 4, 1994. p. 3558–63.
[19] Medrano-Cerda GA, Bowler CJ, Caldwell DG. Adaptive positioncontrol of antagonistic pneumatic muscle actuators. In: Proc EEE/RSJ international conference on intelligent robots and systems,human robot interaction and cooperative robots, Pittsburgh (PA),1995. p. 378–83.
[20] Bowler CJ, Caldwell DG, Medrano-Cerda GA. Pneumatic muscleactuators; Musculature for an anthropomorphic robot arm. In: Proc.IEE colloqium on actuator technology current practice and newdevelopments, London, 1996. p. 8/1–5.
[21] Cai D, Yamaura H. A VSS control method for a manipulator drivenby an McKibben artificial muscle actuator. Electron Commun Jpn1997;80(3):55–63.
[22] Tondu B, Lopex P. Modeling and control of Mckbben artificialmuscle robot actuators. IEEE Control Syst Mag 2000;20(1):15–38.
[23] Carbonell P, Jiang ZP, Repperger DW. Nonlinear control of apneumatic muscle actuator: backstepping vs. sliding-mode. In:Proceeding of the IEEE international conference on control applica-tions, Mexico City, Mexico, 2001. p. 167–72.
[24] Osuka K, Kimura T, Ono T. H1 control of a certain nonlinearactuator. In: Proceeding of the IEEE international conference ondecision and control, Honolulu, Hawai, 1(1), 1990. p. 370–1.
[25] Hamerlain M., An anthropomorphic robot arm driven by artificialmuscles using a variable structure control. In: IEEE/RSJ interna-tional conference on intelligent robots and systems, 1, 1995. p. 550–5.
[26] Balasubramanian V, Rattan KS. Feedforward control of a non-linearpneumatic muscle system using fuzzy logic. In: IEEE internationalconference on fuzzy systems, 1, 2003. p. 272–7.
[27] Hesselroth T, Sarkar K, Patrick van der Smagt P, Schulten K. Neuralnetwork control of a pneumatic robot arm. IEEE Trans Syst ManCyber 1994;24(1):28–38.
[28] Patrick van der Smagt P, Groen F, Schulten K. Analysis and controlof a Rubbertuator arm. Biol Cyber 1996;75:433–40.
[29] Iskarous M, Kawamura K. Intelligent control using a neuro-fuzzynetwork, In: Proc IEEE/RSI international conference on intelligentrobots and systems, 3, 1995. p. 350–5.
[30] Folgheraiter M, Gini G, Perkowski M, Pivtoraiko M. Adaptive reflexcontrol for an artificial hand. In: Proc SYROCO 2003, symposium onrobot control, Holliday Inn, Wroclaw, Poland, 2003.

T.D.C. Thanh, K.K. Ahn / Mechatronics 16 (2006) 577–587 587
[31] Astrom KJ, Hang CC, Persson P, Ho WK. Toward intelligentPID control. In: International conference on automatic, 28, 1992.p. 1–9.
[32] Kim JH, Choi KK. Self-turning discrete PID controller. IEEE TransInd Electron 1987;43:298–300.
[33] Vega P, Prada C, Aleixander V. Self-tuning predictive PID controller.IEE Proc 1991;3:303–11.
[34] Yamada T, Yabuta T. Neural network controller using autotuningmethod for nonlinear functions. IEEE Trans Neural Networks1992;3:595–601.
Copyright © 2022 FDOKUMEN




















