Chaos Suppression Of An Underactuated Manipulator: Experimental Results
6
Supresi´ on de Caos en un Manipulador Planar Subactuado: Resultados Experimentales Ollin Pe˜ naloza Mej´ ıa 1 , Jaime Alvarez Gallegos 1 , Joaqu´ ın Alvarez Gallegos 2 Resumen— Mediante la t´ ecnica de reconstrucci ´ on de atractores y la estimaci´ on del m´ aximo exponente de Lyapunov, se muestra que la din´ amica a largo plazo de un manipulador planar subactuado puede ser ca´ otica. Se considera entonces el problema de estabilizar ´ orbitas peri´ odicas inestables (OPI’s) inmersas en el conjunto invariante ca´ otico del sistema y se dise ˜ na un esquema de control introduciendo retardos en la trayectoria de retroalimentaci´ on. La principal ventaja del m´ etodo propuesto es que resulta ser muy f´ acil de implementar en cualquier sistema f´ ısico, a ´ un cuando no se tenga informaci ´ on disponible de todas sus variables. Adem´ as, dado que el esquema de control aprovecha las propiedades inherentes del comportamiento ca´ otico, la es- tabilizaci´ on se logra con esfuerzos de control relativamente peque ˜ nos. Se presentan resultados experimentales que muestran el desempe ˜ no del sistema en lazo cerrado estabilizado alrededor de una OPI de per´ ıodo uno. Palabras Clave— Caos, Control de Caos, Manipuladores Sub- actuados, ´ Orbitas Peri´ odicas. I. I NTRODUCCI ´ ON Los robots manipuladores son sistemas ampliamente utiliza- dos en la industria, en donde pueden ser programados para ejecutar diferentes tipos de tareas repetitivas que involucran entradas peri ´ odicas a sus actuadores. La ausencia de uno de los actuadores puede conducir a un funcionamiento inadecuado del sistema, como el seguimiento err´ oneo de la trayectoria deseada o la p´ erdida de estabilidad. Este hecho puede provocar que el sistema exhiba comportamiento ca´ otico. Las oscilaciones ca´ oticas representan un tipo peculiar de comportamientos irregulares e impredecibles comunmente considerados indeseables, raz ´ on por la cual se tratan de elimi- nar de la mayor´ ı a de las situaciones en las que se presentan. Un tema interesante en el campo de los sistemas din´ amicos no lineales que ha sido abordado recientemente es el control de caos, en donde el objetivo de control consiste en estabilizar el sistema alrededor de un punto de equilibrio o de una ´ orbita peri´ odica. En este trabajo se ha escogido un manipulador elec- tromec´ anico, subactuado, planar y de dos grados de libertad (2GDL) que puede exhibir comportamiento ca´ otico, para ilus- trar la aplicaci ´ on de un m´ etodo eficiente de control en este tipo de sistemas. Este manipulador reside completamente en un plano horizontal, de manera que sus dos ejes de rotaci ´ on son verticales y la fuerza de gravedad no afecta su comportamiento 1 CINVESTAV-IPN. Depto. de Ingenier´ ıa El´ ectrica, Secci´ on de Meca- tr´ onica. Ap. Postal 14-740, 07000 M´ exico, D.F., M ´ EXICO. {openaloz, jalvarez}@mail.cinvestav.mx 2 CICESE. Depto. de Electr ´ onica y Telecomunicaciones. Km. 107 Carretera Tijuana-Ensenada, 22860 Ensenada, B.C., M ´ EXICO. [email protected] din´ amico. Dado que este manipulador horizontal puede operar en r´ egimen ca´ otico, el problema del control (estabilizaci ´ on) de ´ orbitas peri ´ odicas inestables inmersas en el conjunto invariante ca´ otico es un problema que ha sido abordado recientemente mediante el uso de varias t´ ecnicas. Un trabajo previo en estabi- lizaci´ on de ´ orbitas en un manipulador subactuado (Pendubot) es el reportado en [1], el cual est´ a basado en la t´ ecnica de control de Ott, Grebogi y York (OGY) [2]. Una t´ ecnica alternativa, muy simple comparada con el m´ eto- do OGY, para estabilizar ´ orbitas peri´ odicas inestables (OPI’s) en sistemas ca´ oticos, consiste en utilizar una retroalimentaci ´ on proporcional a la diferencia entre la salida presente y la misma salida retardada un tiempo igual al per´ ı odo de la ´ orbita que se quiere estabilizar. Esta t´ ecnica, conocida como el m´ etodo de Pyragas [3], presenta algunas ventajas sobre otros m´ etodos de estabilizaci´ on de OPI’s basados en la t´ ecnica OGY, como se menciona en [4]. Los par´ ametros de dise˜ no del controlador propuesto en el m´ etodo de Pyragas son dos: la constante de retraso y la ganancia de retroalimentaci ´ on. Puesto que no existen resultados generales que garanticen la estabilidad del ciclo l´ ı mite generado por el sistema en lazo cerrado, en este trabajo se ha realizado un estudio experimental para el caso particular del manipulador horizontal cuando ´ este opera en r´ egimen ca´ otico. Se ha dise˜ nado un esquema de control para estabilizar ´ orbitas peri´ odicas inestables (OPI’s) empotradas en el atractor ca´ otico. En particular, en este docu- mento se ilustra el m´ etodo de identificaci´ on y estabilizaci´ on para una OPI. Sin embargo, el m´ etodo es aplicable para estabilizar m´ as OPI’s de diferente per´ ı odo. El resto del documento est´ a organizado de la siguiente manera. La secci´ on II plantea el problema de control de caos. La seccci´ on III describe la estrategia de control empleada. Las herramientas de an´ alisis de sistemas ca´ oticos se dan en la secci´ on IV. El sistema experimental utilizado en este estudio se presenta en la secci´ on V, mientras que su an´ alisis y control se hace en la secci´ on VI. Finalmente, las conclusiones del trabajo se dan en la secci´ on VII. II. PLANTEAMIENTO DEL PROBLEMA Considere que se tiene un sistema no lineal descrito por la ecuaci´ on diferencial ˙ x = f (x, t)+ Bu y = h(x) (1) donde x ∈ n es el estado, y ∈ l es la salida, h(x) es una funci´ on C ∞ (suave), B es un vector de dimension n y u es el control (funci´ on C 1 ). La funci´ on vectorial f (x, t) se asume continuamente diferenciable. El objetivo t´ ı pico de control de IEEE LATIN AMERICA TRANSACTIONS, VOL. 2, NO. 1, MARCH 2004 19
Transcript of Chaos Suppression Of An Underactuated Manipulator: Experimental Results
Supresion de Caos en un Manipulador PlanarSubactuado: Resultados Experimentales
Ollin Penaloza Mejıa1 , Jaime Alvarez Gallegos1, Joaquın Alvarez Gallegos2
Resumen—Mediante la tecnica de reconstruccion de atractoresy la estimacion del maximo exponente de Lyapunov, se muestraque la dinamica a largo plazo de un manipulador planarsubactuado puede ser caotica. Se considera entonces el problemade estabilizar orbitas periodicas inestables (OPI’s) inmersasen el conjunto invariante caotico del sistema y se disena unesquema de control introduciendo retardos en la trayectoria deretroalimentacion. La principal ventaja del metodo propuesto esque resulta ser muy facil de implementar en cualquier sistemafısico, aun cuando no se tenga informacion disponible de todas susvariables. Ademas, dado que el esquema de control aprovechalas propiedades inherentes del comportamiento caotico, la es-tabilizacion se logra con esfuerzos de control relativamentepequenos. Se presentan resultados experimentales que muestranel desempeno del sistema en lazo cerrado estabilizado alrededorde una OPI de perıodo uno.
Palabras Clave—Caos, Control de Caos, Manipuladores Sub-actuados, Orbitas Periodicas.
I. INTRODUCCION
Los robots manipuladores son sistemas ampliamente utiliza-dos en la industria, en donde pueden ser programados paraejecutar diferentes tipos de tareas repetitivas que involucranentradas periodicas a sus actuadores. La ausencia de uno de losactuadores puede conducir a un funcionamiento inadecuadodel sistema, como el seguimiento erroneo de la trayectoriadeseada o la perdida de estabilidad. Este hecho puede provocarque el sistema exhiba comportamiento caotico.
Las oscilaciones caoticas representan un tipo peculiar decomportamientos irregulares e impredecibles comunmenteconsiderados indeseables, razon por la cual se tratan de elimi-nar de la mayorı a de las situaciones en las que se presentan.Un tema interesante en el campo de los sistemas dinamicosno lineales que ha sido abordado recientemente es el controlde caos, en donde el objetivo de control consiste en estabilizarel sistema alrededor de un punto de equilibrio o de una orbitaperiodica.
En este trabajo se ha escogido un manipulador elec-tromecanico, subactuado, planar y de dos grados de libertad(2GDL) que puede exhibir comportamiento caotico, para ilus-trar la aplicacion de un metodo eficiente de control en este tipode sistemas. Este manipulador reside completamente en unplano horizontal, de manera que sus dos ejes de rotacion sonverticales y la fuerza de gravedad no afecta su comportamiento
1 CINVESTAV-IPN. Depto. de Ingenierı a Electrica, Seccion de Meca-tronica. Ap. Postal 14-740, 07000 Mexico, D.F., MEXICO. {openaloz,jalvarez}@mail.cinvestav.mx
2 CICESE. Depto. de Electronica y Telecomunicaciones. Km. 107 CarreteraTijuana-Ensenada, 22860 Ensenada, B.C., MEXICO. [email protected]
dinamico. Dado que este manipulador horizontal puede operaren regimen caotico, el problema del control (estabilizacion) deorbitas periodicas inestables inmersas en el conjunto invariantecaotico es un problema que ha sido abordado recientementemediante el uso de varias tecnicas. Un trabajo previo en estabi-lizacion de orbitas en un manipulador subactuado (Pendubot)es el reportado en [1], el cual esta basado en la tecnica decontrol de Ott, Grebogi y York (OGY) [2].
Una tecnica alternativa, muy simple comparada con el meto-do OGY, para estabilizar orbitas periodicas inestables (OPI’s)en sistemas caoticos, consiste en utilizar una retroalimentacionproporcional a la diferencia entre la salida presente y la mismasalida retardada un tiempo igual al perı odo de la orbita quese quiere estabilizar. Esta tecnica, conocida como el metodode Pyragas [3], presenta algunas ventajas sobre otros metodosde estabilizacion de OPI’s basados en la tecnica OGY, comose menciona en [4]. Los parametros de diseno del controladorpropuesto en el metodo de Pyragas son dos: la constante deretraso y la ganancia de retroalimentacion.
Puesto que no existen resultados generales que garanticenla estabilidad del ciclo lı mite generado por el sistema en lazocerrado, en este trabajo se ha realizado un estudio experimentalpara el caso particular del manipulador horizontal cuando esteopera en regimen caotico. Se ha disenado un esquema decontrol para estabilizar orbitas periodicas inestables (OPI’s)empotradas en el atractor caotico. En particular, en este docu-mento se ilustra el metodo de identificacion y estabilizacionpara una OPI. Sin embargo, el metodo es aplicable paraestabilizar mas OPI’s de diferente perı odo.
El resto del documento esta organizado de la siguientemanera. La seccion II plantea el problema de control de caos.La secccion III describe la estrategia de control empleada.Las herramientas de analisis de sistemas caoticos se dan en laseccion IV. El sistema experimental utilizado en este estudiose presenta en la seccion V, mientras que su analisis y controlse hace en la seccion VI. Finalmente, las conclusiones deltrabajo se dan en la seccion VII.
II. PLANTEAMIENTO DEL PROBLEMA
Considere que se tiene un sistema no lineal descrito por laecuacion diferencial
x = f(x, t) + Buy = h(x) (1)
donde x ∈ �n es el estado, y ∈ �l es la salida, h(x) es unafuncion C∞ (suave), B es un vector de dimension n y u esel control (funcion C1). La funcion vectorial f(x, t) se asumecontinuamente diferenciable. El objetivo tı pico de control de
IEEE LATIN AMERICA TRANSACTIONS, VOL. 2, NO. 1, MARCH 2004 19

sistemas caoticos es la estabilizacion de una solucion (orbita)periodica inestable empotrada en el atractor.
Sea x∗(t) una solucion T -periodica del sistema (1) operandoen regimen caotico, con u ≡ 0 y con condicion inicial x∗(0) =x∗0; es decir,
x∗(t + T ) = x∗(t) ∀ t ≥ 0. (2)
Como la solucion es inestable, es razonable proponer elobjetivo de control como una estabilizacion en algun sentido.Por ejemplo, defı nase el conjunto
Γ(x∗0) = {x ∈ Rn : x = x∗(t), t ≥ 0, x∗(0) = x∗0}. (3)
Este es el conjunto de todos los puntos en el espacio de estadoque constituyen la orbita periodica que pasa por x∗0.
Consideramos entonces como objetivo de control la estabi-lizacion orbital de la trayectoria x∗(t); es decir, que el sistemaen lazo cerrado cumpla que, para cualquier ε > 0 exista δ > 0tal que, dada una condicion inicial de (1) x(0) que satisface||x(0) − x∗0|| < δ, se satisfaga distt≥0[x(t),Γ(x∗0)] < ε,donde dist(·) es una funcion distancia y x(t) es la solucionde (1) con condicion inicial x(0). Esto corresponde a unaestabilizacion orbital [5].
III. LA ESTRATEGIA DE CONTROL
Un sistema caotico puede ser considerado como si tuvierasu propia fuente de energı a. Existen fuerzas de expansion ycontraccion dentro de la dinamica caotica que mantienen lastrayectorias acotadas. Una idea original en el aprovechamientode esta caracterı stica, es tomar la energı a y redireccionarlahacia donde se tenga un desempeno deseado usando tantoesfuerzo de control suficientemente pequeno, como el menornumero posible de estados. Esta idea es realizable como semenciona en [3].
El metodo de Pyragas [4] consiste en utilizar unaretroalimentacion retardada, ya sea del estado o de la salida,para estabilizar una orbita τ -periodica del sistema no lineal(1).
En terminos del estado, la ley de control se expresa como
u(t) = K ′[x(t) − x(t − τ)], (4)
donde K ′ es la ganancia de retroalimentacion y τ es el retrasode tiempo. El sistema controlado queda
x = f(x, t) + K(x(t) − x(t − τ)), (5)
donde K = K ′B.
III-A. Asignacion de la ganancia K
Chen & Yu [6] han considerado el problema de seguimientode OPI’s implementando un controlador por retroalimentaciondel estado retardado para sistemas caoticos, y han obtenidoalgunas condiciones analı ticas de suficiencia derivadas de estemetodo para el ajuste de los parametros del controlador. Parael problema de seguimiento, se tiene el siguiente resultado.Teorema 1: Suponga que el sistema (1) es autonomo y u =
0. Sea J(x) = f ′(x) = ∂f(x)/∂x la matriz Jacobiana delsistema, y suponga que esta uniformemente acotada por unamatriz constante J0, tal que J(x) ≤ J0 para todo x(t) y todo
t : t0 ≤ t ≤ ∞. Entonces siempre existe una matriz constanteK, tal que [J0 + K] tiene todos sus valores propios con partereal negativa. En consecuencia, el sistema (5) converge a unciclo lı mite.
�Para la prueba del teorema, vea [6].
III-B. Estimacion de la constante de retraso τ
El metodo de identificacion del retardo que corresponde a laOPI que se desea estabilizar, utiliza el Metodo del GradienteDescendente (MGD). Para aplicar esta tecnica, el ı ndice dedesempeno a minimizar es [7]
J =1n
n∑k=1
||x(tk−1) − x(tk−1 − τ)||2, (6)
donde x(tk) es el estado medido al instante tk, con perı odode muestreo δh, y n es el numero total de datos usados en laserie de tiempo para la busqueda. El gradiente se deriva como
∂J
∂τ=
2n
n∑k=1
[x(tk−1) − x(tk−1 − τ)]T x(tk−1 − τ), (7)
y se calculaτi+1 = τi − β
∂J
∂τ, (8)
tal que J sea mı nimo. La constante positiva β se utiliza paramejorar la convergencia del algoritmo.
Aunque el metodo anterior puede utilizarse para estabilizaruna OPI de cualquier sistema dinamico, un sistema caoticotiene la propiedad de contar con un numero infinito de OPI’s,por lo que este metodo resulta muy adecuado para este tipode sistemas. Enseguida se discute un metodo para determinar,a partir de la medicion de alguna variable de un sistema, sieste se encuentra efectivamente en regimen caotico.
IV. ANALISIS DE SISTEMAS CAOTICOS
En general, no es posible resolver las ecuaciones diferen-ciales que describen el fenomeno caotico. Un aspecto impor-tante es que normalmente es posible tener la medicion de almenos una de las variables del sistema y con esto analizar elcomportamiento caotico utilizando series de tiempo. El metodode analisis empleado se basa en el teorema de empotramientopara la reconstruccion del atractor caotico usando coordenadasretrasadas de la serie de tiempo [8].
IV-A. Reconstruccion de atractoresLa reconstruccion del atractor se realiza utilizando versiones
retrasadas de una cantidad escalar s, observada desde el tiempot0 a un tiempo final t, como coordenadas para el espaciode estado. Sea x(n) = s(t0 + nΔt), n = 1, 2 . . . , paraalgun tiempo inicial t0 y un perı odo de muestreo Δt. De lasobservaciones se construye el vector
y(n) = [x(n), x(n + T ), . . . , x(n + (d − 1)T )], (9)
que se utiliza como estado del sistema. El problema asociado aesta reconstruccion es la eleccion del retraso T y la dimensionde empotramiento d. Para resolver este problema se aplican losconceptos de promedio de informacion mutua (PIM) y vecinosfalsos cercanos (VFC).
20 IEEE LATIN AMERICA TRANSACTIONS, VOL. 2, NO. 1, MARCH 2004

Fig. 1. Fotografı a del manipulador horizontal.
IV-B. Promedio de informacion mutua (PIM)
Consideremos dos mediciones x(n) = xn y x(n + T ) =xn+T . La informacion mutua entre la medicion xn y lamedicion xn+T es la cantidad aprendida por xn+T acercade xn para algun n. El promedio ponderado de toda estainformacion estadı stica se escribe como [8]
I(T ) =∑
xn,xn+T
P (xn, xn+T )log2
[P (xn, xn+T )
P (xn)P (xn+T )
], (10)
donde P (•) es la densidad de probabilidad de una mediciony P (•, •) la densidad de probabilidad conjunta de dos medi-ciones. La prescripcion para determinar si los valores de x(n)y x(n + T ) son suficientemente independientes tal que sepuedan usar para reconstruir el atractor y(n), es tomar T dondeel primer mı nimo de I(T ) ocurre [8].
IV-C. Vecinos falsos cercanos (VFC)
En una dimension de empotramiento que es muy baja paradesdoblar el atractor, no todos los puntos que se mantienenjuntos seran vecinos debido a la dinamica; algunos de ellosestaran alejados y apareceran como vecinos en esa dimension,dado que la geometrı a del atractor ha sido proyectada a unespacio de dimension inferior.
En un espacio de dimension d, denotando el i-esimo ve-cino cercano de y(n) por yi(n), el cuadrado de la distanciaEuclideana entre estos dos puntos es
R2d(n, i) =
d−1∑k=0
[x(n + kT ) − xi(n + kT )]2. (11)
En un espacio de dimension (d + 1) se agrega x(n + dT )como una coordenada a cada uno de los vectores y(n). Elcuadrado de la distancia Euclideana en esta dimension entreambos puntos es
R2d+1(n, i) = R2
d(n, i) + [x(n + dT ) − xi(n + dT )]2. (12)
Un criterio para encontrar vecinos falsos puede ser elincremento en distancia entre y(n) y yr(n) cuando se va desde
0 50 100 150 200 250−4
−3
−2
−1
0
q1(t
) [R
ad]
Tiempo [s]
0 50 100 150 200 250−0.5
0
0.5
1
1.5
2
2.5
q2(t
) [R
ad]
Tiempo [s]
Fig. 2. Series de tiempo para ambos eslabones.
la dimension d a la d + 1. El incremento en distancia puedeestablecerse como [8]√
R2d+1(n,i)−R2
d(n,i)
R2d(n,i)
= |x(n+dT )−xi(n+dT )|Rd(n,i) > RTH , (13)
donde RTH es algun umbral.
V. EL MANIPULADOR SUBACTUADO
V-A. DescripcionEl manipulador planar es un sistema electromecanico sub-
actuado de eslabones rı gidos, planar, rotacional y de dosgrados de libertad (2GDL). El primer eslabon es actuadodirectamente por un motor de CD (union activa) y el segundoeslabon no cuenta con actuador (union pasiva). El disenodel mecanismo permite un movimiento rotacional de 360o
de ambos eslabones. El movimiento de los eslabones residecompletamente en un plano horizontal tal que la fuerza degravedad no afecta su comportamiento dinamico.
Considerando la fotografı a del manipulador, Fig. 1, se ob-serva que la coordenada generalizada q1 mide el angulo derotacion del primer eslabon con respecto al eje x, mientrasque la coordenada generalizada q2 mide el angulo de rotaciondel segundo eslabon relativo al primero. El sentido positivode las mediciones se considera contrario al movimiento delas manecillas del reloj. Las longitudes a los centros de masade cada eslabon se denotan como lc1 y lc2 respectivamente,mientras que I1 e I2 son los momentos de inercia de loseslabones con respecto al eje que pasa a traves de sus centrosde masa.
V-B. Plataforma experimentalEl prototipo de laboratorio consta del manipulador horizon-
tal subactuado, un servomotor de corriente directa y sensoresde posicion angular (codificadores opticos), fabricado porMechatronic Systems Inc., que se encuentra en el Laboratoriode Mecatronica del Centro de Investigacion y de EstudiosAvanzados del Instituto Politecnico Nacional.
Cada articulacion cuenta con un codificador optico para lalectura de la posicion del eslabon. Uno de los codificadores
MEJÍA et al.: CHAOS SUPPRESSION OF AN UNDERACTUATED 21

0 5 10 15 20 25 30 35 40 45 501.5
2
2.5
3
3.5
4
4.5
5
5.5
6
I(T
)
Retraso, T
Fig. 3. Promedio de Informacion Mutua.
1 2 3 4 5 6 7 8 90
10
20
30
40
50
60
70
80
90
100
% V
FC
Dimensión, d
Fig. 4. Porcentaje de Vecinos Falsos Cercanos.
se encuentra en la union pasiva y el otro se localiza adjuntoal motor de CD (union activa). Ademas se emplea un servoamplificador para suministrar la corriente y voltaje necesariosal motor de CD.
Para programar las leyes de control se uso una computadorapersonal, compatible con IBM, con una tarjeta D/A, unainterfase a los codificadores y una tarjeta de temporizacion.Usando la biblioteca de rutinas programadas suministradaspor el fabricante para las tarjetas de interfase, fue posibleprogramar los algoritmos de control directamente en LenguajeC, con un perı odo de muestreo de 1ms.
VI. ANALISIS Y CONTROL DEL MANIPULADORSUBACTUADO
Se obtuvieron series de tiempo del manipulador horizontalforzado para una excitacion de voltaje V = A sin(wt), durante250s y tomando muestras cada 1ms. Con el fin de investigarla presencia de un movimiento caotico, la amplitud A sevario desde 0.1 hasta 2.5 V y la frecuencia angular desde1 hasta 9 rad/s. Durante 250s se obtiene un movimientodesordenado con A = 1.5 V y w = 5 rad/s (Fig. 2).
Tomando la serie de tiempo del eslabon 1 de la Fig. 2,el retraso para la reconstruccion del atractor es T = 21,
Fig. 5. Espectro de frecuencias.
−3.2−3
−2.8−2.6
−2.4−2.2
−3.2
−3
−2.8
−2.6
−2.4
−2.2−3.2
−3
−2.8
−2.6
−2.4
−2.2
x(n)x(n+T)
x(n
+2
T)
Fig. 6. Proyeccion del atractor reconstruido.
de acuerdo al PIM (Fig. 3). Usando el criterio de VFC, ladimension de empotramiento resulta ser dE = 5 (Fig. 4). Laproyeccion del atractor reconstruido se muestra en la Fig. 6.
Se estimo el maximo exponente de Lyapunov λ1 usando elalgoritmo dado en [9], resultando ser λ1 = 0.4162 bits/it.Este exponente positivo satisface uno de los requisitos delcomportamiento caotico.
Podemos decir que el comportamiento del sistema es caoticoporque [1]: (a) el PIM de la senal tiene un mı nimo local,(b) el porcentaje de VFC llega a cero para una dimensionfinita, (c) la senal tiene un espectro en frecuencia amplio, (d) lageometrı a del atractor y (e) el maximo exponente de Lyapunoves positivo.
VI-A. Diseno del controlador
Con el manipulador horizontal operando en regimen caotico,el control con retardo en la trayectoria de retroalimentacionqueda
V (t) = A sin(wt) + v(t), (14)
donde v(t) es una perturbacion que tiene que ser introducida alsistema como una retroalimentacion negativa [4]. Para nuestro
22 IEEE LATIN AMERICA TRANSACTIONS, VOL. 2, NO. 1, MARCH 2004

0 50 100 150 200 2500.2
0.4
0.6
0.8
1
1.2
Tiempo [s]
||Jo(
t)||
Fig. 7. Norma de la matriz J0.
0 10 20 30 40 50 60 70 80 90 100
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
Iteraciones
Con
stan
te d
e R
etra
so
Fig. 8. Estimacion de la constante de retraso τ .
caso, su estructura es
v(t) = −k1[q1(t) − q1(t − τ)] − k3[q3(t) − q3(t − τ)]. (15)
El sistema es considerado de dimension 5, y con el propositode estimar la matriz de retroalimentacion K, se ha utilizadola proyeccion del sistema en el subespacio de posicionesangulares (q1, q3). Se ha tomado la serie caotica del eslabon1 para encontrar la matriz J0 que satisface el Teorema 1.Para ello se calculo ||J0(t)|| usando la ecuacion de estadodel sistema y los datos experimentales de la serie de tiempo.
Como puede observarse en la Fig. 7, ||J0(t)||max = 1.1758.La matriz J0 correspondiente a este valor es
J0 =[
0 10 −0.6184
]. (16)
Luego se tiene que
[J0 + K] =[ −k1 1
0 −k3 + 0.6184
], (17)
por lo que las condiciones para que los valores propios de lamatriz tengan parte real negativa es
k1, k3 > 0, k1 + k3 > 0.6184 (18)
40 40.5 41 41.5 42 42.5 43 43.5 44
−2.8
−2.6
−2.4
−2.2
−2
−1.8
Tiempo [s]
q1(t
) [R
ad]
Fig. 9. Salida controlada en estado estacionario.
40 41 42 43 44 45 46 47−0.05
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
v(t)
Tiempo [s]
Fig. 10. Control v(t) en estado estacionario.
Si se hace k = k1 = k3, se tiene que satisfacer ladesigualdad k > 0.3092. El valor propuesto, k = 0.4, cumpleesta condicion.
Para la identificacion del perı odo de la OPI se uso elMetodo del Gradiente Descendente (MGD). Partiendo de unacondicion inicial τ0 = 0.42, que corresponde a la condicioninmediata a la solucion trivial τ = 0, se establecio β = 2.5 yse empezo a calcular el ı ndice de desempeno despues de 60s,con actualizaciones cada 0.1s. La constante de retraso despuesde 40 iteraciones resulto ser τ = 0.8920, que corresponde alperı odo de la OPI deseada (Fig. 8).
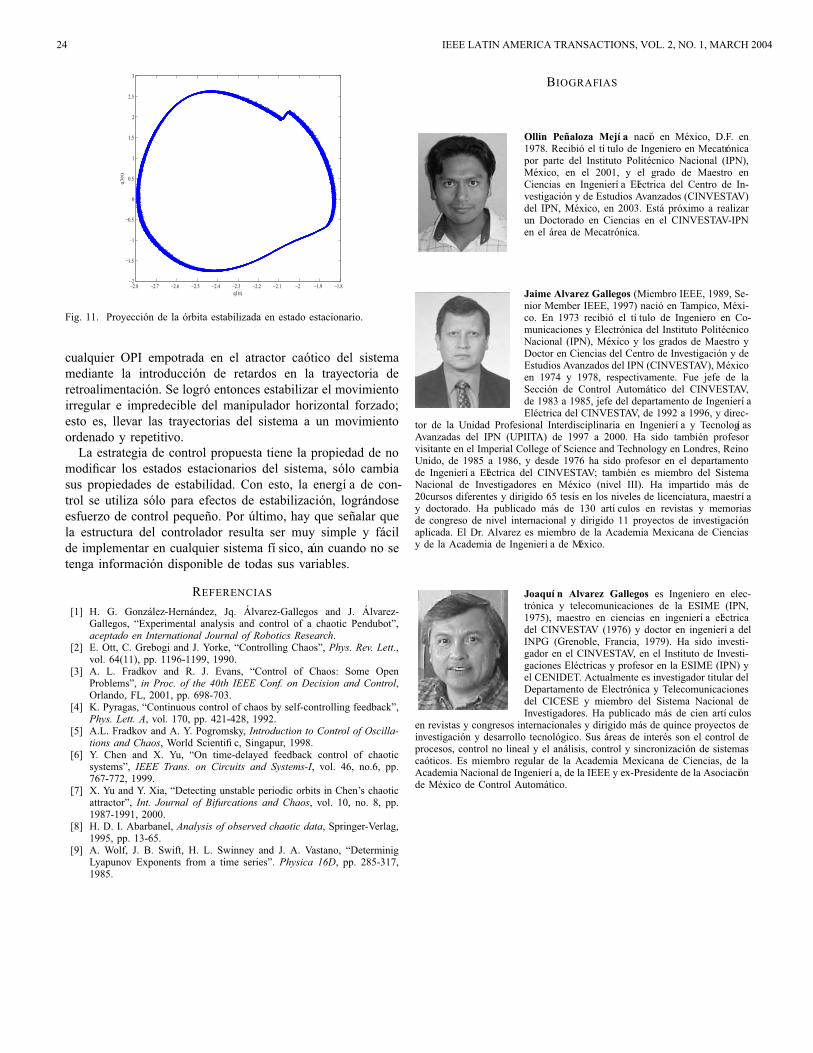
Se llevo a cabo el esquema de control (15). La Fig. 9muestra la serie de tiempo de la salida controlada en estadoestacionario, en donde puede observarse que el perı odo de os-cilacion corresponde al estimado por el MGD. La proyeccionen el plano de fase de la orbita estabilizada se muestra en laFig. 11. Finalmente, la magnitud de la variable de control v(t)se observa en la Fig. 10.
VII. CONCLUSIONES
Se mostro que la dinamica a largo plazo de un manipu-lador horizontal puede ser caotica bajo ciertas condiciones deoperacion. Se diseno un esquema de control que estabiliza
MEJÍA et al.: CHAOS SUPPRESSION OF AN UNDERACTUATED 23
−2.8 −2.7 −2.6 −2.5 −2.4 −2.3 −2.2 −2.1 −2 −1.9 −1.8−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
3
q1(t)
q3(t
)
Fig. 11. Proyeccion de la orbita estabilizada en estado estacionario.
cualquier OPI empotrada en el atractor caotico del sistemamediante la introduccion de retardos en la trayectoria deretroalimentacion. Se logro entonces estabilizar el movimientoirregular e impredecible del manipulador horizontal forzado;esto es, llevar las trayectorias del sistema a un movimientoordenado y repetitivo.
La estrategia de control propuesta tiene la propiedad de nomodificar los estados estacionarios del sistema, solo cambiasus propiedades de estabilidad. Con esto, la energı a de con-trol se utiliza solo para efectos de estabilizacion, lograndoseesfuerzo de control pequeno. Por ultimo, hay que senalar quela estructura del controlador resulta ser muy simple y facilde implementar en cualquier sistema fı sico, aun cuando no setenga informacion disponible de todas sus variables.
REFERENCIAS
[1] H. G. Gonzalez-Hernandez, Jq. Alvarez-Gallegos and J. Alvarez-Gallegos, “Experimental analysis and control of a chaotic Pendubot”,aceptado en International Journal of Robotics Research.
[2] E. Ott, C. Grebogi and J. Yorke, “Controlling Chaos”, Phys. Rev. Lett.,vol. 64(11), pp. 1196-1199, 1990.
[3] A. L. Fradkov and R. J. Evans, “Control of Chaos: Some OpenProblems”, in Proc. of the 40th IEEE Conf. on Decision and Control,Orlando, FL, 2001, pp. 698-703.
[4] K. Pyragas, “Continuous control of chaos by self-controlling feedback”,Phys. Lett. A, vol. 170, pp. 421-428, 1992.
[5] A.L. Fradkov and A. Y. Pogromsky, Introduction to Control of Oscilla-tions and Chaos, World Scientifi c, Singapur, 1998.
[6] Y. Chen and X. Yu, “On time-delayed feedback control of chaoticsystems”, IEEE Trans. on Circuits and Systems-I, vol. 46, no.6, pp.767-772, 1999.
[7] X. Yu and Y. Xia, “Detecting unstable periodic orbits in Chen’s chaoticattractor”, Int. Journal of Bifurcations and Chaos, vol. 10, no. 8, pp.1987-1991, 2000.
[8] H. D. I. Abarbanel, Analysis of observed chaotic data, Springer-Verlag,1995, pp. 13-65.
[9] A. Wolf, J. B. Swift, H. L. Swinney and J. A. Vastano, “DeterminigLyapunov Exponents from a time series”. Physica 16D, pp. 285-317,1985.
BIOGRAFIAS
Ollin Penaloza Mejı a nacio en Mexico, D.F. en1978. Recibio el tı tulo de Ingeniero en Mecatronicapor parte del Instituto Politecnico Nacional (IPN),Mexico, en el 2001, y el grado de Maestro enCiencias en Ingenierı a Electrica del Centro de In-vestigacion y de Estudios Avanzados (CINVESTAV)del IPN, Mexico, en 2003. Esta proximo a realizarun Doctorado en Ciencias en el CINVESTAV-IPNen el area de Mecatronica.
Jaime Alvarez Gallegos (Miembro IEEE, 1989, Se-nior Member IEEE, 1997) nacio en Tampico, Mexi-co. En 1973 recibio el tı tulo de Ingeniero en Co-municaciones y Electronica del Instituto PolitecnicoNacional (IPN), Mexico y los grados de Maestro yDoctor en Ciencias del Centro de Investigacion y deEstudios Avanzados del IPN (CINVESTAV), Mexicoen 1974 y 1978, respectivamente. Fue jefe de laSeccion de Control Automatico del CINVESTAV,de 1983 a 1985, jefe del departamento de Ingenierı aElectrica del CINVESTAV, de 1992 a 1996, y direc-
tor de la Unidad Profesional Interdisciplinaria en Ingenierı a y Tecnologı asAvanzadas del IPN (UPIITA) de 1997 a 2000. Ha sido tambien profesorvisitante en el Imperial College of Science and Technology en Londres, ReinoUnido, de 1985 a 1986, y desde 1976 ha sido profesor en el departamentode Ingenierı a Electrica del CINVESTAV; tambien es miembro del SistemaNacional de Investigadores en Mexico (nivel III). Ha impartido mas de20cursos diferentes y dirigido 65 tesis en los niveles de licenciatura, maestrı ay doctorado. Ha publicado mas de 130 artı culos en revistas y memoriasde congreso de nivel internacional y dirigido 11 proyectos de investigacionaplicada. El Dr. Alvarez es miembro de la Academia Mexicana de Cienciasy de la Academia de Ingenierı a de Mexico.
Joaquı n Alvarez Gallegos es Ingeniero en elec-tronica y telecomunicaciones de la ESIME (IPN,1975), maestro en ciencias en ingenierı a electricadel CINVESTAV (1976) y doctor en ingenierı a delINPG (Grenoble, Francia, 1979). Ha sido investi-gador en el CINVESTAV, en el Instituto de Investi-gaciones Electricas y profesor en la ESIME (IPN) yel CENIDET. Actualmente es investigador titular delDepartamento de Electronica y Telecomunicacionesdel CICESE y miembro del Sistema Nacional deInvestigadores. Ha publicado mas de cien artı culos
en revistas y congresos internacionales y dirigido mas de quince proyectos deinvestigacion y desarrollo tecnologico. Sus areas de interes son el control deprocesos, control no lineal y el analisis, control y sincronizacion de sistemascaoticos. Es miembro regular de la Academia Mexicana de Ciencias, de laAcademia Nacional de Ingenierı a, de la IEEE y ex-Presidente de la Asociacionde Mexico de Control Automatico.
24 IEEE LATIN AMERICA TRANSACTIONS, VOL. 2, NO. 1, MARCH 2004