
folding mechine (robot manipulator)
20
Laporan Robotika Folding Machine Mata Kuliah Robotika Disusun Oleh : Ryan Hary Sufrianto (1221001) Dosen Pembimbing : Wahyu Setyo Pambudi, ST., MT PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS INTERNASIONAL BATAM 2014
Transcript of folding mechine (robot manipulator)

Laporan Robotika Folding Machine
Mata Kuliah Robotika
Disusun Oleh :
Ryan Hary Sufrianto (1221001)
Dosen Pembimbing :
Wahyu Setyo Pambudi, ST., MT
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS INTERNASIONAL BATAM
2014

BAB 1
LANDASAN TEORI
1.1 Robot Manipulator
Gambar 1. Robot lengan satu sendi
Pada awalnya, aplikasi robot hampir tak dapat dipisahkan dengan industri
sehingga muncul istilah industrial robot dan robot manipulator .Satu sisi lengan yang
disebut sebagai pangkal ditanam pada bidang atau meja yang statis (tidak bergerak),
sedangkan sisi yang lain yang disebut sebagai ujung (end of effector) dapat dimuati
dengan tool tertentu sesuai dengan tugas robot.
Sistem robot secara garis besar terdiri dari sistem pengendali, elektronik dan
mekanik. Dalam bentuk diagram blok dapat dinyatakan seperti dalam Gambar 1.2
Gambar 1.2 Diagram sistem robot
G(s) adalah persamaan matematika pengendali, sedangkan H(s) adalah
persamaan untuk sistem robot secara fisik termasuk aktuator dan sistem
elektroniknya. Komponen ri adalah masukan acuan yang dalam penerapannya dapat
berupa posisi, kecepatan, dan percepatan. Dalam fungsi waktu, nilai masukan ini
dapat bervariasi dan kontinyu yang membentuk suatu konfigurasi trayektori.
Komponen e adalah nilai galat antara keluaran dan masukan acuan, sedangkan u
adalah keluaran dari pengendali dan y adalah fungsi gerak robot yang diharapkan
selalu sama dengan acuan yang didefinisikan pada masukan ri.
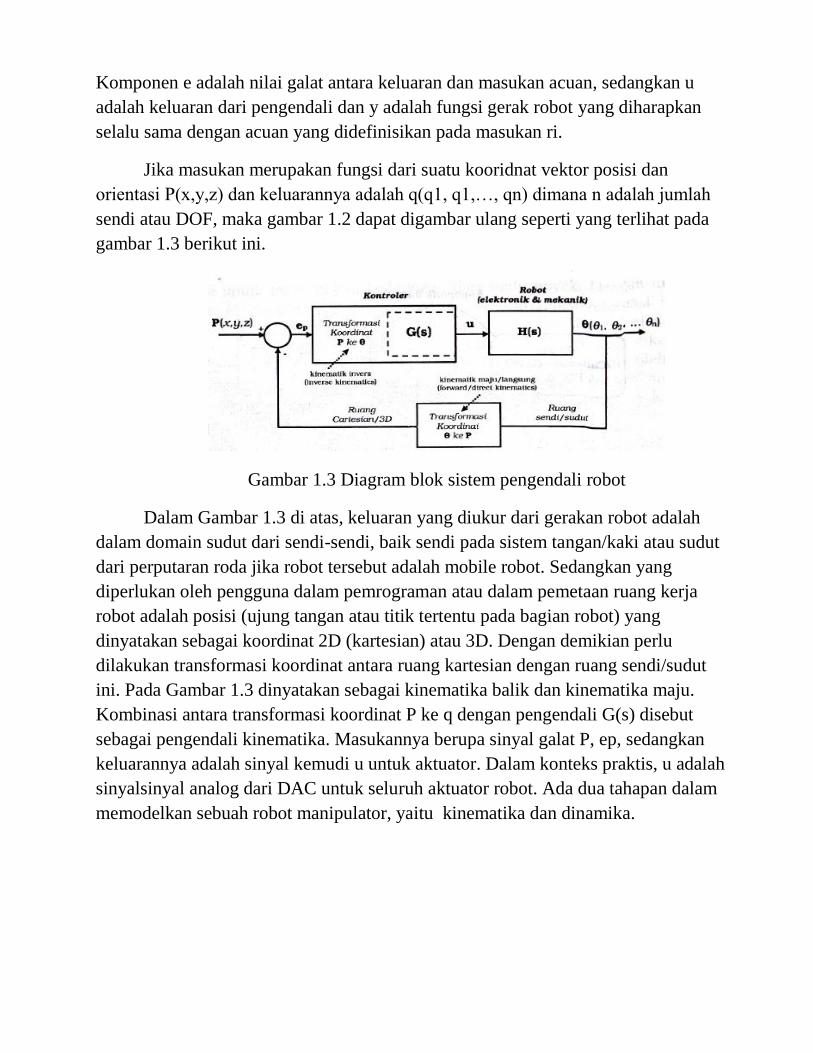
Jika masukan merupakan fungsi dari suatu kooridnat vektor posisi dan
orientasi P(x,y,z) dan keluarannya adalah q(q1, q1,…, qn) dimana n adalah jumlah
sendi atau DOF, maka gambar 1.2 dapat digambar ulang seperti yang terlihat pada
gambar 1.3 berikut ini.
Gambar 1.3 Diagram blok sistem pengendali robot
Dalam Gambar 1.3 di atas, keluaran yang diukur dari gerakan robot adalah
dalam domain sudut dari sendi-sendi, baik sendi pada sistem tangan/kaki atau sudut
dari perputaran roda jika robot tersebut adalah mobile robot. Sedangkan yang
diperlukan oleh pengguna dalam pemrograman atau dalam pemetaan ruang kerja
robot adalah posisi (ujung tangan atau titik tertentu pada bagian robot) yang
dinyatakan sebagai koordinat 2D (kartesian) atau 3D. Dengan demikian perlu
dilakukan transformasi koordinat antara ruang kartesian dengan ruang sendi/sudut
ini. Pada Gambar 1.3 dinyatakan sebagai kinematika balik dan kinematika maju.
Kombinasi antara transformasi koordinat P ke q dengan pengendali G(s) disebut
sebagai pengendali kinematika. Masukannya berupa sinyal galat P, ep, sedangkan
keluarannya adalah sinyal kemudi u untuk aktuator. Dalam konteks praktis, u adalah
sinyalsinyal analog dari DAC untuk seluruh aktuator robot. Ada dua tahapan dalam
memodelkan sebuah robot manipulator, yaitu kinematika dan dinamika.

1.2 Dinamika Robot
Dinamika robot adalah persamaan matematis yang menggambarkan tingkah
laku dinamis dari manipulator dengan memperhatikan gaya yang menyebabkan
pergerakan tersebut. Persamaan dinamika digunakan untuk kebutuhan :
Simulasi pergerakan lengan robot
Perancangan strategi dan algoritma kendali agar lengan robot
memenuhi tanggapan dan kinerja yang diinginkan
Evaluasi perancangan kinematika dan struktur dari lengan robot
Konsep Dinamika
Robot secara fisik adalah suatu benda yang memiliki struktur tertentu dengan
massa tertentu, sehingga dalam pergerakannya tunduk kepada hukum-hukum alam
yang berkaitan dengan gravitasi dan massa yang akan mempengaruhi kualitas
gerakan. Bila robot tersebut berada di luar angkasa yang bebas gravitasi, maka
massa saja yang dapat menimbulkan efek inersia. Setiap struktur dan massa yang
berbeda akan memberikan efek inersia yang berbeda pula sehingga penanganan
dalam pemberian torsi pada tiap sendi seharusnya berbeda pula. Jadi konsep
dinamika ini adalah hubungan antara gerakan dan gaya yang terlibat dalam robot
manipulator yang menetapkan hubungan antara posisi variable sendi robot yang
didefinisikan oleh koordinat, turunannya( kecepatan dan percepatan), gaya dan torsi
yang diterapkan pada sendi dan parameter dimensi robot
Gambar 1.4 Diagram model dinamika robot.
Perhatikan kembali Gambar 1.3 sebelumnya. Jika u adalah sinyal aktuasi pada
actuator motor DC-torsi, maka masukan pada model dinamika robot dapat
dinyatakan sebagai torsi t seperti yang terlihat pada persamaan (1)
𝜏 = 𝑖𝑎𝐾𝑎 … (1)
Seperti yang diperlihatkan pada Gambar 1.4 adalah sinyal analog (arus motor) yang
dikeluarkan oleh pengendali, dan Ka adalah konstanta motor. Karena torsi pada

sendi akan menghasilkan gerakan, maka keluaran (dinamika) robot dapat dinyatakan
memiliki 3 komponen yang menyatu dalam fenomena gerak rotasi tiap lengan sendi,
yaitu sudut θ, kecepatan sudut θ ̇ , dan percepatan sudut θ ̈ .
Gambar 1.5 memperlihatkan skema kendali robotik berorientasi dinamika dengan
penggambaran lebih detil tentang torsi yang dihasilkan oleh aktuator.
Gambar 1.5 Diagram sistem control robotic berorientasi dinamik
Jika keluaran sistem adalah θ, �̇�, �̈�(1, 2, … , n) dinyatakan sebagai q, maka torsi
yang diberikan keoada sendi-sendi robot adalah seperti yang terlihat pada persamaan
(2) berikut ini.
𝜏 = 𝑓(𝑞) … (2)
Persamaan ini dikenal sebagai persamaan dinamika maju. Model dinamikanya
dapat ditulis sebagai H(s). Sebaliknya, jika torsi τ diketahui (sebagai masukan),
maka q akan diketahui dengan menggunakan dinamika balik. Model dinamikanya
dinyatakan H-1
(s). Persamaannya adalah:
𝑞 = 𝑓−1(𝜏) … (3)
Hubungan model matematik dinamika balik dan dinamika maju dapat
diilustrasikan melalui gambar 1.5 berikut ini.
Gambar 1.5 Transformasi Inverse Dynamic dan Forward Dynamic

Lagrange-Euler Formulation
A. Persamaan Lagrange Euler
d
dt ⦋
∂L
∂�̇�𝑖⦌ −
∂L
∂𝑞𝑖 = τi i =1, 2, …, n
Dimana :
L = lagrangian Function = kinetic energy K – potentianl energy P
K = total kinetic energy of robot arm
P = total potential energy of the robot arm
𝑞𝑖 = generalized coordinates of the robot arm
�̇�𝑖 = first time derivative of the generalized coordinate, 𝑞𝑖
τi = generalized force (torque) applied to the system at joint i to drive link i
Model ini sangat bergantung pada keseimbangan dari gaya dalam hukum
kedua Newton (persamaan 4) atau sama dengan gerakan rotasi atau yang disebut
hukum Euler (persamaan 5).
∑ 𝐹 =𝑑
𝑑𝑡(𝑚𝑣) … (4)
∑ 𝑇 =𝑑
𝑑𝑡𝐼𝜔 = 𝐼�̇� + 𝜔 × (𝐼𝜔) … (5)
Dengan demikian, dalam kasus paling sedeerhana dari robot dengan satu
lengan ditunjukkan pada gambar 1.6. Jika ditinjau dari hokum newton,
keseimbangan kekuatan dari torsi akan menghasilkan persamaan sebagai berikut :
𝜏 − 𝑀𝑔𝐿𝑐𝑜𝑠𝜃 = 𝐼𝑑2𝜃
𝑑𝑡2 → 𝜏 = 𝑀𝐿2�̈� + 𝑀𝑔𝐿𝑐𝑜𝑠𝜃 … (6)
Gambar 1.6 Model Lengan dengan Titik Masa

Ada juga pendekatan alternative lain untuk memperoleh model ini dengan
menggunakan formulasi Lagrange berdasarkan pertimbangan energi yaitu perbedaan
antara energi kinetik (Ek) dan energi potensial (Ep). Persamaan ini didefinisi
sebagai berikut.
ℒ(𝑞(𝑡), �̇�(𝑡)) = 𝐸𝑘(𝑞(𝑡), �̇�(𝑡)) − 𝐸𝑝(𝑞(𝑡)) … (7)
𝐸𝑘 = 1
2𝑚𝑣2 ; 𝐸𝑝 = 𝑚𝑔ℎ … (8)
Dengan Lagrange L, kita dapat memecahkan persamaan Euler-Lagrange yang
bergantung pada turunan parsial dari energi kinetik dan potensial dari sistem untuk
menghitung persamaan gerak dan didefinisikan sebagai berikut.
𝐹 =𝑑
𝑑𝑡[
𝜕ℒ
𝜕�̇�] −
𝜕ℒ
𝜕𝜃 … (9)
Dalam kasus robot yang ditunjukkan pada gambar 1.6, digunakan persamaan
(8) untuk dinamik model dari robot dengan formulasi sebagai berikut
𝐸𝑘 = 1
2𝑀𝐿2�̇� ; 𝐸𝑝 = 𝑀𝑔𝐿𝑠𝑖𝑛𝜃 … (10)
Masukkan persamaan Ek dan Ep kedalam persamaan lagrange (7) sehingga
diberoleh sebagai berikut :
ℒ(𝑞(𝑡), �̇�(𝑡)) = 1
2𝑀𝐿2�̇� − 𝑀𝑔𝐿𝑠𝑖𝑛𝜃 … (10)
Sekarang dapat dihitung gaya yang diterapkan pada koordinat umum dengan
menggunakan persamaan Euler Lagrange.
𝜕ℒ
𝜕𝜃= −𝑀𝑔𝐿𝑐𝑜𝑠𝜃
𝜕ℒ
𝜕�̇�= 𝑀𝐿2�̇�
𝑑
𝑑𝑡[
𝜕ℒ
𝜕�̇�] = 𝑀𝐿2�̈�
… (11)
Dengan memasukkan persamaan (11) kedalam persamaan (9) sehingga
dihasilkan persamaan sebagai berikut
𝐹 = 𝑀𝐿2�̈� + 𝑀𝑔𝐿𝑐𝑜𝑠𝜃 … (12)

B. Kecepatan Joint dari Lengan Robot
Perhatikan gambar, dimana iri adalah posisi sebuah titk yang terletak di
link i yang ikut bergerak bersama link i.
= (𝑥𝑖 , 𝑦𝑖 , 𝑧𝑖 , 1)𝑇 𝑖𝑟𝑖 =
Titik tersebut (iri )dipandang terhadap kerangka koordinat diam
(base, 0x0y0z0)
0𝑟𝑖= 𝑜𝐴𝑖
𝑖𝑟𝑖
Dimana
𝑜𝐴𝑖 = 𝑜𝐴1
1𝐴2 … 𝑖 − 1𝐴𝑖
C. Jika joint i berbentuk revolute
D. Jika joint i berbentuk prismatic

E. Kecepatan titik iri terhadap kerangka koordinat base
F. Turunan parsial 0Ai terhadap qj
G. Jika joint i berbentuk revolute
H. Jika joint i berbentuk prismatic
I. Dengan demikian secara umum, untuk i = 1,2,…...n
Persamaan diatas dapat diinterpretasikan sebagai pengaruh dari
pergerakan joint j pada semua titik di link i
Untuk penyederhanaan notasi, didefinisikan
Sehingga persamaan diatas dapat ditulis ulang :

BAB 2
ANALISA PROGRAM
Dan di bawah ini hasil analisa program dari dosen pembimbing mata kuliah
robotika.
Dari coding di atas, adalah tahap awal dengan intalasi variable yang kita gunakan.

Gambar di atas adalah tampilan program dari folding mechine, di daerah nomer
1berfungsi memulai program dan mengakhiri program, nomer 2 adalah parameter
untuk nilai kp, ki, kd nya, di nomor 3 adalah fungsi untuk system kendali apa yang
kita gunakan, dimana disana terdapat system PID, P, PI, PD dan FUZZY PD, di
nomer 4 adalah untuk menetukan sudut target atau sudut yang ingin kita capai, dan
di nomer 5 adalah hasil dan betuk gelombang respon yang di muncul oleh program
yang kita jalan kan di sana juga akan terlihat perbedaan antara system controller
yang kita gunakan dalam artian lain kita bisa membedakan setiap respon dari setiap
system controller.
Coding di atas dalah program dari bagian perhitungan dynamic untuk 2 buah lengan
dari folding machine, dimana ada massa dan gravitasi + inersia disini lah rumus
lagrange euler kita terapkan. Pada tt2 dan tt22 merupakan percepatan sudut, tt0 dan
tt00 adalah sudut dalam bentuk radian dan deg dan deg2 merupakan sudut drajat.
Dan sudut2 tersebut akan di tampilkan di display. Untuk tho itu adalah torsi yang di
hasilkan dari controller yang kita pakai.

Untuk coding diatas kan adalah untuk menetukan nilai tetap dari arm length,set, leg
base,massa, panjang, inersia, gravitasi, gain dt, deg, kp, kid an kd nya. Di dalam
coding ini juga terdapat gain, jarna gerak dari folding machine itu lambat maka di
berilah gain untuk mempercepat gerak nya.
Coding Angle scroll ini untuk penentuan nilai dari teta.
Dan dari coding diatas ini adalah coding dari PID, P, PI, PD, FUZZY.

Disini ada timer 1 yang dimana fungsi dari coding untuk menjalan kan perintah di
time dynamic dari program folding machine.
Di timer 2 adalah coding untuk menjalan kan perintah dari time controller dan
display.

dari program diatas, dapat kita lihat bagian dari program fuzzy yang dimana ada
fuzzifikasi, ke role evolution hingga ke difuzzifikasi. Di role evolution sudah kita
buat bahas loguestik dimana ada torsi negative besar dan lain-lain yang pada inti nya
itu adalah role Bahasa manusia yang kita buat.

BAB 3
ANALISA PEMBAHASAN
Gambar di atas adalah tampilan awal pada program folding machine, dimana kita
belum menentukan controller yang kita pakai.
Untuk yang pertama, controller yang akan kita gunakan adalah:
A. Controller P.

Pada P controller, memiliki nilai rise time yang hampir di angka 0,18s dengan nilai
kp yang telah ditentukan sebesar 0,5. Dan system ini berosilasi sebesar sudut target
dan tidak mampu untuk mencapai steady state.
B. Controller PI.
Pada hasil percobaan pada controller PI ini juga tidak bisa mencapai steady state dan
tetap berosilasi sebesar sudut target. Bisa di amati bahwa I controller tidak
berpengaruh. Pada Controller PI ini memiliki nilai kp=0,5 dan ki=0,001 dengan hasil
rise time dan respon yang baik terhadap target.
C. Controller PD

Dari gambar dapat kita amati bahwa, pada controller ini nilai kp= 0,5 dan kd= 3,
Dan terjadi overshoot sebesar 18 drajad dengan nilai maksimal 98drajad. Dan dapat
di amati tidak ada terjadi nya error steady state.dan hal ini juga menunjukkan tidak
ada pengaruh ny I controller pada proses.
D. Controller PID
Pada gambar bisa kita lihat bahwa nilai kp=0.5 , kd=3, dan ki= 0.001, dengan terjadi
nya overshoot yang sama dengan PD controller dengan tidak terjadi nya error steady
state. Dari program terjadi overshoot pada saat pertama gerakkan namun masi bisa di
redam dan mengembalikan arm pada steady state dengan menghasil kan nilai torsi
yang berlawanan arah torsi yang sebelum nya. Untuk PID memiliki respon waktu
yang cepat akan tetapi terjadi overshoot.

E. Controller FUZZY PD
Pada gambar dapat diamati nilai rise time 0.01s dan delay 0.01s. terjadi overshoot
sebesar 3 drajad dengan nilai maksimum 85 drajad dan nilai steady state sytem 82
derajad. Pada proses terjadi 2 drajad error steady state. Hal ini dikarnakan belum
maksimal nya respon yang di hasilkan.hal ini bisa saja terjadi karna role yang
digunakan belum tepat untuk plant tersebut. Namun besar nya error steady state ini
dapat di toleransi karana di folding mechine ini tidak di perlukan kepresisian sudut
yang tinggi.

BAB 4
KESIMPULAN
Dinamika robot adalah persamaan matematis yang menggambarkan tingkah
laku dinamis dari manipulator dengan memperhatikan gaya yang
menyebabkan pergerakan tersebut.
Robot secara fisik adalah suatu benda yang memiliki struktur tertentu dengan
massa tertentu, sehingga dalam pergerakannya tunduk kepada hukum-hukum
alam yang berkaitan dengan gravitasi dan massa yang akan mempengaruhi
kualitas gerakan. Bila robot tersebut berada di luar angkasa yang bebas
gravitasi, maka massa saja yang dapat menimbulkan efek inersia. Setiap
struktur dan massa yang berbeda akan memberikan efek inersia yang berbeda
pula sehingga penanganan dalam pemberian torsi pada tiap sendi seharusnya
berbeda pula. Jadi konsep dinamika ini adalah hubungan antara gerakan dan
gaya yang terlibat dalam robot manipulator yang menetapkan hubungan antara
posisi variable sendi robot yang didefinisikan oleh koordinat, turunannya(
kecepatan dan percepatan), gaya dan torsi yang diterapkan pada sendi dan
parameter dimensi robot
pada proses PID dan PD didapati memiliki nilai respon waktu yang paling
cepat namun masih terjadi overshoot.
Tanpa control D respon sistem menjadi lambat dan tidak mencapai steady
state.
Untuk P dan PI di dapati berosilasi dan tidak mencapai steady state dan I
controller tidak berpengaruh.
Pada proses PID memang terbilang cepat ketimbang fuzzy dalam hal
overshoot nya. Meskipun di fuzzy memiliki error steady state tapi masih bisa
di toleransi karna nilai nya yang kecil.
Pada PID dengan menurun kan nilai D maka system ini bisa di katakan
memiliki respon terbaik karna memiliki rise time lebih cepat, tidak error
steady state dan overshoot.

Daftar Pustaka
Kumar V, “Robot Geometry and Kinematics”,www. IntroRobotKinematics5.pdf.
David I. Robles G., (2012).” PID control dynamics of a robotic arm manipulator
with two degrees of freedom”.
Mark W. Spong, Seth Hutchinson, and M. Vidyasagar,(2004), Robot Dynamics and
Control Second Edition.



















