MultiDimensional Graph-Based Soft Iterative Receiver for MIMO-OFDM
11
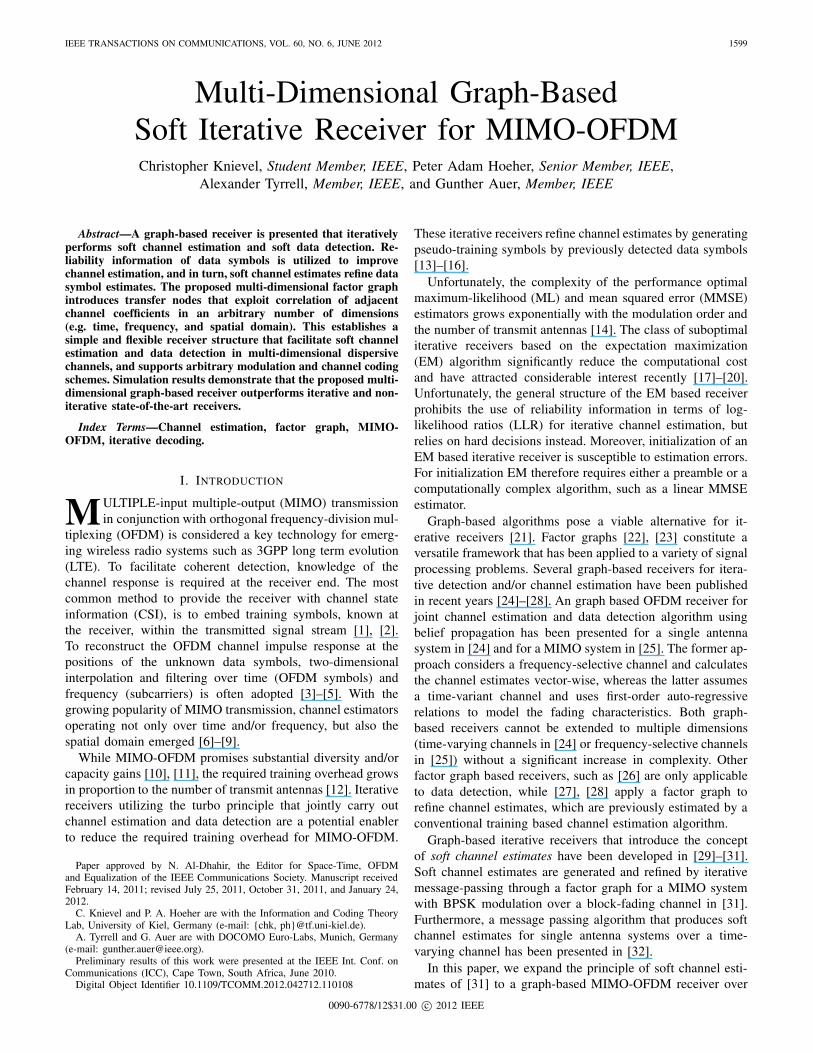
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 60, NO. 6, JUNE 2012 1599 Multi-Dimensional Graph-Based Soft Iterative Receiver for MIMO-OFDM Christopher Knievel, Student Member, IEEE, Peter Adam Hoeher, Senior Member, IEEE, Alexander Tyrrell, Member, IEEE, and Gunther Auer, Member, IEEE Abstract—A graph-based receiver is presented that iteratively performs soft channel estimation and soft data detection. Re- liability information of data symbols is utilized to improve channel estimation, and in turn, soft channel estimates refine data symbol estimates. The proposed multi-dimensional factor graph introduces transfer nodes that exploit correlation of adjacent channel coefficients in an arbitrary number of dimensions (e.g. time, frequency, and spatial domain). This establishes a simple and flexible receiver structure that facilitate soft channel estimation and data detection in multi-dimensional dispersive channels, and supports arbitrary modulation and channel coding schemes. Simulation results demonstrate that the proposed multi- dimensional graph-based receiver outperforms iterative and non- iterative state-of-the-art receivers. Index Terms—Channel estimation, factor graph, MIMO- OFDM, iterative decoding. I. I NTRODUCTION M ULTIPLE-input multiple-output (MIMO) transmission in conjunction with orthogonal frequency-division mul- tiplexing (OFDM) is considered a key technology for emerg- ing wireless radio systems such as 3GPP long term evolution (LTE). To facilitate coherent detection, knowledge of the channel response is required at the receiver end. The most common method to provide the receiver with channel state information (CSI), is to embed training symbols, known at the receiver, within the transmitted signal stream [1], [2]. To reconstruct the OFDM channel impulse response at the positions of the unknown data symbols, two-dimensional interpolation and filtering over time (OFDM symbols) and frequency (subcarriers) is often adopted [3]–[5]. With the growing popularity of MIMO transmission, channel estimators operating not only over time and/or frequency, but also the spatial domain emerged [6]–[9]. While MIMO-OFDM promises substantial diversity and/or capacity gains [10], [11], the required training overhead grows in proportion to the number of transmit antennas [12]. Iterative receivers utilizing the turbo principle that jointly carry out channel estimation and data detection are a potential enabler to reduce the required training overhead for MIMO-OFDM. Paper approved by N. Al-Dhahir, the Editor for Space-Time, OFDM and Equalization of the IEEE Communications Society. Manuscript received February 14, 2011; revised July 25, 2011, October 31, 2011, and January 24, 2012. C. Knievel and P. A. Hoeher are with the Information and Coding Theory Lab, University of Kiel, Germany (e-mail: {chk, ph}@tf.uni-kiel.de). A. Tyrrell and G. Auer are with DOCOMO Euro-Labs, Munich, Germany (e-mail: [email protected]). Preliminary results of this work were presented at the IEEE Int. Conf. on Communications (ICC), Cape Town, South Africa, June 2010. Digital Object Identifier 10.1109/TCOMM.2012.042712.110108 These iterative receivers refine channel estimates by generating pseudo-training symbols by previously detected data symbols [13]–[16]. Unfortunately, the complexity of the performance optimal maximum-likelihood (ML) and mean squared error (MMSE) estimators grows exponentially with the modulation order and the number of transmit antennas [14]. The class of suboptimal iterative receivers based on the expectation maximization (EM) algorithm significantly reduce the computational cost and have attracted considerable interest recently [17]–[20]. Unfortunately, the general structure of the EM based receiver prohibits the use of reliability information in terms of log- likelihood ratios (LLR) for iterative channel estimation, but relies on hard decisions instead. Moreover, initialization of an EM based iterative receiver is susceptible to estimation errors. For initialization EM therefore requires either a preamble or a computationally complex algorithm, such as a linear MMSE estimator. Graph-based algorithms pose a viable alternative for it- erative receivers [21]. Factor graphs [22], [23] constitute a versatile framework that has been applied to a variety of signal processing problems. Several graph-based receivers for itera- tive detection and/or channel estimation have been published in recent years [24]–[28]. An graph based OFDM receiver for joint channel estimation and data detection algorithm using belief propagation has been presented for a single antenna system in [24] and for a MIMO system in [25]. The former ap- proach considers a frequency-selective channel and calculates the channel estimates vector-wise, whereas the latter assumes a time-variant channel and uses first-order auto-regressive relations to model the fading characteristics. Both graph- based receivers cannot be extended to multiple dimensions (time-varying channels in [24] or frequency-selective channels in [25]) without a significant increase in complexity. Other factor graph based receivers, such as [26] are only applicable to data detection, while [27], [28] apply a factor graph to refine channel estimates, which are previously estimated by a conventional training based channel estimation algorithm. Graph-based iterative receivers that introduce the concept of soft channel estimates have been developed in [29]–[31]. Soft channel estimates are generated and refined by iterative message-passing through a factor graph for a MIMO system with BPSK modulation over a block-fading channel in [31]. Furthermore, a message passing algorithm that produces soft channel estimates for single antenna systems over a time- varying channel has been presented in [32]. In this paper, we expand the principle of soft channel esti- mates of [31] to a graph-based MIMO-OFDM receiver over 0090-6778/12$31.00 c 2012 IEEE
Transcript of MultiDimensional Graph-Based Soft Iterative Receiver for MIMO-OFDM
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 60, NO. 6, JUNE 2012 1599
Multi-Dimensional Graph-BasedSoft Iterative Receiver for MIMO-OFDMChristopher Knievel, Student Member, IEEE, Peter Adam Hoeher, Senior Member, IEEE,
Alexander Tyrrell, Member, IEEE, and Gunther Auer, Member, IEEE
Abstract—A graph-based receiver is presented that iterativelyperforms soft channel estimation and soft data detection. Re-liability information of data symbols is utilized to improvechannel estimation, and in turn, soft channel estimates refine datasymbol estimates. The proposed multi-dimensional factor graphintroduces transfer nodes that exploit correlation of adjacentchannel coefficients in an arbitrary number of dimensions(e.g. time, frequency, and spatial domain). This establishes asimple and flexible receiver structure that facilitate soft channelestimation and data detection in multi-dimensional dispersivechannels, and supports arbitrary modulation and channel codingschemes. Simulation results demonstrate that the proposed multi-dimensional graph-based receiver outperforms iterative and non-iterative state-of-the-art receivers.
Index Terms—Channel estimation, factor graph, MIMO-OFDM, iterative decoding.
I. INTRODUCTION
MULTIPLE-input multiple-output (MIMO) transmissionin conjunction with orthogonal frequency-division mul-
tiplexing (OFDM) is considered a key technology for emerg-ing wireless radio systems such as 3GPP long term evolution(LTE). To facilitate coherent detection, knowledge of thechannel response is required at the receiver end. The mostcommon method to provide the receiver with channel stateinformation (CSI), is to embed training symbols, known atthe receiver, within the transmitted signal stream [1], [2].To reconstruct the OFDM channel impulse response at thepositions of the unknown data symbols, two-dimensionalinterpolation and filtering over time (OFDM symbols) andfrequency (subcarriers) is often adopted [3]–[5]. With thegrowing popularity of MIMO transmission, channel estimatorsoperating not only over time and/or frequency, but also thespatial domain emerged [6]–[9].
While MIMO-OFDM promises substantial diversity and/orcapacity gains [10], [11], the required training overhead growsin proportion to the number of transmit antennas [12]. Iterativereceivers utilizing the turbo principle that jointly carry outchannel estimation and data detection are a potential enablerto reduce the required training overhead for MIMO-OFDM.
Paper approved by N. Al-Dhahir, the Editor for Space-Time, OFDMand Equalization of the IEEE Communications Society. Manuscript receivedFebruary 14, 2011; revised July 25, 2011, October 31, 2011, and January 24,2012.
C. Knievel and P. A. Hoeher are with the Information and Coding TheoryLab, University of Kiel, Germany (e-mail: {chk, ph}@tf.uni-kiel.de).
A. Tyrrell and G. Auer are with DOCOMO Euro-Labs, Munich, Germany(e-mail: [email protected]).
Preliminary results of this work were presented at the IEEE Int. Conf. onCommunications (ICC), Cape Town, South Africa, June 2010.
Digital Object Identifier 10.1109/TCOMM.2012.042712.110108
These iterative receivers refine channel estimates by generatingpseudo-training symbols by previously detected data symbols[13]–[16].
Unfortunately, the complexity of the performance optimalmaximum-likelihood (ML) and mean squared error (MMSE)estimators grows exponentially with the modulation order andthe number of transmit antennas [14]. The class of suboptimaliterative receivers based on the expectation maximization(EM) algorithm significantly reduce the computational costand have attracted considerable interest recently [17]–[20].Unfortunately, the general structure of the EM based receiverprohibits the use of reliability information in terms of log-likelihood ratios (LLR) for iterative channel estimation, butrelies on hard decisions instead. Moreover, initialization of anEM based iterative receiver is susceptible to estimation errors.For initialization EM therefore requires either a preamble or acomputationally complex algorithm, such as a linear MMSEestimator.
Graph-based algorithms pose a viable alternative for it-erative receivers [21]. Factor graphs [22], [23] constitute aversatile framework that has been applied to a variety of signalprocessing problems. Several graph-based receivers for itera-tive detection and/or channel estimation have been publishedin recent years [24]–[28]. An graph based OFDM receiver forjoint channel estimation and data detection algorithm usingbelief propagation has been presented for a single antennasystem in [24] and for a MIMO system in [25]. The former ap-proach considers a frequency-selective channel and calculatesthe channel estimates vector-wise, whereas the latter assumesa time-variant channel and uses first-order auto-regressiverelations to model the fading characteristics. Both graph-based receivers cannot be extended to multiple dimensions(time-varying channels in [24] or frequency-selective channelsin [25]) without a significant increase in complexity. Otherfactor graph based receivers, such as [26] are only applicableto data detection, while [27], [28] apply a factor graph torefine channel estimates, which are previously estimated by aconventional training based channel estimation algorithm.
Graph-based iterative receivers that introduce the conceptof soft channel estimates have been developed in [29]–[31].Soft channel estimates are generated and refined by iterativemessage-passing through a factor graph for a MIMO systemwith BPSK modulation over a block-fading channel in [31].Furthermore, a message passing algorithm that produces softchannel estimates for single antenna systems over a time-varying channel has been presented in [32].
In this paper, we expand the principle of soft channel esti-mates of [31] to a graph-based MIMO-OFDM receiver over
0090-6778/12$31.00 c© 2012 IEEE

1600 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 60, NO. 6, JUNE 2012
a time-variant frequency-selective channel. Transfer nodesutilize channel correlation information of multiple dimensionsin the time, frequency and spatial domains. On the basis ofthe sum-product algorithm, a symbol-wise message exchangebetween nodes of the factor graph is established. The proposedmulti-dimensional graph-based soft iterative receiver (MD-GSIR) integrates channel estimation and data detection in aconsistent way where both tasks process soft information, soas to iteratively improve performance. With a well designedmessage passing schedule, the effects of short cycles aremitigated. To our best knowledge, a complete descriptionof a graph-based receiver incorporating multiple antennas,higher-order modulation, and a realistic channel model, whilemaintaining a low computational complexity, has not beenpresented before in the literature.
The performance of MD-GSIR is evaluated for a theo-retical channel model with uniform distributed parametersin all domains, time, frequency and space; as well as fora more realistic channel model derived from measurementcampaigns [33]. The convergence of MD-GSIR with respectto (w.r.t.) the training density is analyzed by means of ex-trinsic information transfer (EXIT) charts. The MD-GSIRperformance is compared to non-iterative and iterative state-of-the-art algorithms, namely to a non-iterative symbol-wiseML detector in combination with a 2D Wiener filter, and aniterative a posteriori probability (APP) detector with EM basedchannel estimation. The presented simulation results providea comprehensive overview of the achievable performanceof advanced MIMO-OFDM receivers operating in variouschannel conditions, with different modulation formats andcode rates.
The remainder of this paper is organized as follows: Sec-tion II defines the system and channel model. The MD-GSIR and the transfer nodes are introduced in Section III.A convergence analysis of MD-GSIR based on EXIT chartsas well as numerical results for two different channel modelsare presented in Section IV. Finally, Section V draws theconclusions.
Throughout the paper, we adopt the following notationconventions: (·)∗ denotes the conjugate complex, P (x) andp(x) are the probability and the probability density function(pdf) of a random variable x, respectively. The expectationoperator is given by E {·}.
II. SYSTEM AND CHANNEL MODEL
The MIMO-OFDM system under consideration comprisesL OFDM subcarriers and K OFDM symbols per frame. Theequivalent discrete-time model of a MIMO channel with NT
transmit (Tx) and NR receive (Rx) antennas can be representedin the frequency domain (after OFDM demodulation) as
yn[l, k] =
NT∑m=1
hn,m[l, k]xm[l, k] + wn[l, k]
= hn,m[l, k] xm[l, k] +
NT∑i=1i�=m
hn,i[l, k] xi[l, k]
︸ ︷︷ ︸MAI
+wn[l, k]︸ ︷︷ ︸AWGN
,
(1)
where l ∈ {0, 1, . . . , L−1} and k ∈ {0, 1, . . . ,K−1}represent the OFDM subcarrier and OFDM symbol in-dex. The channel coefficient hn,m[l, k] ∈ C relates Txantenna m with Rx antenna n, and is normalized suchthat E{|hn,m[l, k]|2} .
= 1. The observation at Rx antenna n,yn[l, k] ∈ C, consists of NT superimposed signals. In orderto recover the channel input at Tx antenna m, denoted byxm[l, k] ∈ C, the signals originating from other Tx antennasi �=m are observed as multi-antenna interference (MAI). To-gether with MAI an additive white Gaussian noise (AWGN)term wn[l, k] with zero mean and variance σ2
w corrupts the re-ceived signal. The composite interference may be representedby the effective noise term vn,m[l, k]:
yn[l, k].= hn,m[l, k]xm[l, k] + vn,m[l, k]. (2)
Possible scenarios for mutually independent transmit signalsare single-user MIMO systems using spatial multiplexingand/or multi-user MIMO systems. The principle of the graph-based receiver can also be applied to the case of spatialprecoding, though this is beyond the scope of this paper.
The channel coefficients are assumed to be wide-sensestationary (WSS), complex Gaussian variables with zero mean,and can be modeled as [34]
hn,m[l, k]= limNP→∞
1√NP
NP∑i=1
{exp
(j(θi+2πfD,ikTs−2πτilF
+ 2πmdTx
λsin (ϕi)+2πn
dRx
λsin (ϑi)
))}, (3)
where Ts and F denote the OFDM symbol duration and sub-carrier spacing, respectively. Each of the NP multipath com-ponents consists of an individual random-phase θi ∈ [0, 2π),a propagation delay τi ∈ [0, τmax], and a Doppler frequencyfD,i ∈ [−fD,max,+fD,max], where τmax and fD,max denotethe maximum propagation delay and maximum Doppler fre-quency. The latter two components determine the fading infrequency and time, respectively. Moreover, a linear antennaarray is assumed, with a spacing of dTx at the transmitter sideand dRx at the receiver side. A multipath component departswith an angle of ϕi and is received with ϑi.
Training symbols are inserted in time and frequency do-main, according to Fig. 1, with an equidistant spacing intime Dt and frequency Df. Furthermore, training symbolsassociated to different Tx antennas are orthogonally multi-plexed in time and frequency, i.e., when one transmit antennais transmitting a training symbol, all other antennas remainsilent (antenna muting). Hence, multi-antenna interference attraining symbol positions is mitigated, which simplifies thegeneration of initial channel estimates.
III. MD-GSIR: MULTI-DIMENSIONAL GRAPH-BASED
SOFT ITERATIVE RECEIVER
Factor graphs are powerful graphical tools that have beenapplied to a large variety of problems in digital communica-tions [22], [23]. Generally, a factor graph is a bipartite graph,i.e., the nodes of a graph are partitioned into two disjointsets U and V such that every edge connects a node u ∈ Uwith a node of v ∈ V . An exchange of information between

KNIEVEL et al.: MULTI-DIMENSIONAL GRAPH-BASED SOFT ITERATIVE RECEIVER FOR MIMO-OFDM 1601
Fig. 1. Training grid with a periodic spacing between adjacent trainingsymbols of Df in frequency and and Dt in time.
Fig. 2. Message exchange between the GSIR receiver and the channeldecoder.
nodes of the same set is forbidden. Message exchange betweenthese sets is facilitated, e.g., according to the sum-productalgorithm [22].
The following sections explain the proposed multi-dimensional graph-based soft iterative receiver (MD-GSIR) indetail. The general factor graph structure of MIMO-OFDMand the generation of soft channel estimates are introducedin Section III-A and III-B. Section III-C derives the transfernodes that leverage multi-dimensional channel estimation.The information exchange at coefficient nodes and soft datadetection are presented in Section III-D and III-E. Finally, themessage scheduling achieving best performance is detailed inSection III-F.
A. Receiver Structure and Associated Factor Graph
Bit-interleaved coded modulation (BICM) is considered.After OFDM demodulation, the MD-GSIR jointly estimatesthe channel coefficients and data symbols as illustrated inFig. 2. The log-likelihood ratios (LLRs) of the data bits arepassed to the deinterleaver and descrambler. The channel de-coder processes the deinterleaved and descrambled LLRs andfeeds back extrinsic information of the decoded data symbols.One global iteration comprises one MD-GSIR and one Turbodecoding iteration. After interleaving and scrambling, the MD-GSIR uses the extrinsic information as a priori information insubsequent iterations.
The objective of MD-GSIR is to perform joint channelestimation and data detection, which involves the estimation oftwo types of variables, namely data bits bm,ν [l, k] and channelcoefficients hn,m[l, k]. The factor graph for a 2×2 MIMO-OFDM system employing QPSK modulation is illustrated inFig. 3. The two disjoint sets U and V are visualized by (i)circles for the unknown data bits (bit nodes), data symbols(symbol nodes) and channel coefficients (coefficient nodes)and (ii) rectangles for the received samples (observationnodes). Mapping nodes connect bit nodes with symbol nodes
Fig. 3. Factor graph structure of a 2×2 MIMO-OFDM system and QPSKmodulation. Without loss of generality, the transfer nodes connect adjacentcoefficient nodes in the time domain.
Fig. 4. 3D structure of the factor graph connecting channel coefficient nodesin time, frequency and space.
according to the modulation format, depicted as a black dotwithin a square. All messages exchanged between nodes areinstances of the sum-product algorithm.
Fig. 4 shows the connections of the channel coefficientswith the transfer nodes in three dimension; time, frequencyand space. In the spatial domain the transfer nodes utilize thechannel correlation between transmit antennas. We note thatthe number of dimension of the factor graph is not limitedto three; by also taking into account the channel correlationsbetween receive antenna elements, a four-dimensional factorgraph is obtained.
An MD-GSIR iteration is outlined below, with each stepbeing explained in detail in subsequent sections.
1. At the bit nodes bit probabilities P (bm,ν=0) andP (bm,ν=1) are sent to mapping nodes.
2. At mapping nodes symbol probabilities
P (xm)=Nb∏ν=1
P (bm,ν) are calculated, where Nb denotes

1602 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 60, NO. 6, JUNE 2012
the number of bits per symbol. Subsequently the symbolprobabilities are sent to observation nodes.
3. At the observation nodes the symbol probabilities P (xm)are utilized in combination with the received samples, tocalculate channel coefficient estimates for each symbol(cf. Section III-B).
4. In order to facilitate message exchange throughout theentire frame, channel coefficients of neighboring OFDMsubcarriers, OFDM symbols, transmit and receive an-tennas are connected via transfer nodes. A message ofa coefficient node is distributed to all other coefficientnodes (cf. Section III-C).
5. Combining the messages of neighboring coefficient nodes(cf. Section III-D), refined coefficient estimates are sentback to the observation nodes, where in turn refinedsymbol probabilities are generated (cf. Section III-E).
6. The mapping nodes finally calculate LLR values for thebit nodes, which are passed to the channel decoder forfurther processing.
B. Soft Channel Estimation
The task of channel estimation in the observation nodes is tocompute the conditional pdf p(yn|hn,m). During initialization,only the information of training symbols is utilized, whileadditional information of data symbols is exploited in subse-quent iterations. Without loss of generality, the OFDM symboland subcarrier indices k and l are omitted in the following toenhance readability.
In order to reduce computational cost, the effective noiseterm vn,m in (2) is approximated by a Gaussian variable,which is characterized by vn,m ∼ CN (μv,n,m, σ2
v,n,m). Theconditional pdf p(yn|hn,m) is calculated as follows:
p (yn|hn,m)=∑
xm∈XP (xm) p (yn|hn,m, xm)
=∑
xm∈XP (xm)
1
πσ2v,n,m
·
exp
(−|hn,m−(yn−μv,n,m)/xm|2
σ2v,n,m/|xm|2
), (4)
where X is the symbol alphabet. In order to reduce thecomputational complexity of calculating the mixed Gaussiandistribution, (4) is approximated by a Gaussian distribution:p(yn|hn,m) ∝ p(hn,m). If transmitted symbols are reliablydetected during iterations, we will have one symbol xi withP (xi) � P (xj), i �= j. This justifies the Gaussian approx-imation. The mean and variance of p (hn,m) are thus givenby [32]:
μh,n,m=α(yn−μv,n,m)∑
xm∈X
P (xm)
xm|xm|2 , (5)
σ2h,n,m=α
(σ2v,n,m+|yn−μv,n,m|2) ∑
xm∈X
P (xm)
|xm|4 −|μh,n,m|2,
(6)
where α is a normalization factor defined asα=1/
(∑xm∈X P (xm)/|xm|2). The mean value μh,n,m
of the channel coefficient represents the hard estimate of
the coefficient, whereas the variance σ2h,n,m is interpreted as
reliability information. Thus, a large variance results in a lessreliable estimate of the channel coefficient and vice versa.
In the high signal-to-noise ratio (SNR) region, the per-formance of factor graph based receivers is improved byscaling the variance of the coefficient message slightly. Thiseffect was observed in [35], where short cycles led to anoverestimation of the quality of the estimates, resulted in LLRvalues that were too large. For MD-GSIR the variance of thechannel coefficients is therefore increased by a factor β>1.The message sent from a coefficient node to a transfer nodetherefore yields p(hn,m) ∼ CN (μh,n,m, βσ2
h,n,m
). The value
of β = 1.02 is found by empirical measures and attains goodperformance for all studied cases.
C. Transfer Node
The channel estimation accuracy may be improved byutilizing the reliability information of neighboring channelcoefficients. This is accomplished by transfer nodes, whichdistribute messages from channel coefficients throughout alldimensions, as shown in Fig. 4, for a 3D factor graph.Specifically, a transfer node describes the deviation betweenchannel coefficients hn,m[l, k] and hn+n′,m+m′ [l+l′, k+k′],which are denoted by h and h′ to simplify the notation:
Δn′,m′ [l′, k′] .= h− ωh′, |ω| = 1. (7)
The tuning factor ω ∈ C depends on the correlation prop-erties between adjacent transfer nodes. For a symmetricallydistributed spectrum, the correlation function is real valuedsuch that ω=1, whereas the tuning factor ω = ejϕ is complexvalued for non-symmetric distributions. Given a Rayleighfading channel, a transfer node is approximated by a zero-mean Gaussian pdf:
Δn′,m′ [l′, k′] ∼ N (0, σ2Δ,n′,m′ [l′, k′]
). (8)
According to (7), information between adjacent channel coef-ficients is exchanged as follows:
μh′ = ω·μh, σ2h′ = σ2
h+σ2Δ,n′,m′ [l′, k′]. (9)
A message exchanged within a transfer node scales itsmean μh′ by a factor of ω, whereas its variance σ2
h′ isincreased by the variance of the domain-specific transfer node.Since the variance of a channel coefficient is interpreted asreliability information (cf. Section III-B), the transfer functionreduces the reliability of the message with each node; inher-ently decreasing the influence of this message on the overallmessage generation.
The variance of the transfer node is calculated as follows
σ2Δ,n′,m′ [l′, k′] = E
{|h− ωh′|2}= E
{|h|2}︸ ︷︷ ︸.=1
+E{|h′|2}︸ ︷︷ ︸.=1
−E {ωhh′∗} −E {ωh∗h′}
= 2 (1− Re [ωE {h∗h′}]) , (10)
where E{h∗h′} corresponds to the multi-dimensional auto-correlation function between the two channel coefficients hand h′.

KNIEVEL et al.: MULTI-DIMENSIONAL GRAPH-BASED SOFT ITERATIVE RECEIVER FOR MIMO-OFDM 1603
In order to prevent short cycles and the inherent ex-change of intrinsic information, a transfer node only con-nects two neighboring channel coefficients of one domain,i.e., l′=± 1→k′=n′=m′=0, k′=± 1→l′=n′=m′=0, etc., asillustrated in Fig. 4. Provided a WSS channel, the correlationfunction E{h∗h′} therefore only depends on the consideredchannel dimension, so that the transfer nodes can be calculatedindependently for each domain; either time, frequency orspace.
1) Frequency Domain: The variance for each domain de-pends on the distribution of the domain specific dispersionparameters. In case the exact distribution of the power delayprofile is not known, a common approximation is to assumethat propagation delays in (3) are uniformly distributed within[0, τmax]. Then the variance of the transfer node (10) in thefrequency domain between adjacent subcarriers amounts to
σ2Δ,f = 2
(1− sinc (τmaxF )Re
{ωfe
j2π τmax2 F
}), (11)
where τmax and F denote the maximum propagation delay andthe OFDM subcarrier spacing. The variance (11) is minimizedwhen the real part is maximized. By setting the value of thetuning factor ωf as
ωf = e−j2π τmax2 F = e−jπτmaxF , (12)
the imaginary part in (11) diminishes. By substituting (12)into (11), the minimum variance for the frequency domaintransfer node results in
σ2Δ,f = 2 (1− sinc (τmaxF )) . (13)
Note that shifting the tuning factor ωf = e−jπτmaxF isequivalent to shifting the power delay profile by −τmax/2 inthe delay domain [3], [4].
A commonly adopted distribution of the power delay profileis an exponentially decaying function:
p(τn) =
{1στ
exp(−τn/στ ) 0 ≤ τn ≤ τmax
0 else,(14)
where στ denotes the root mean square (RMS) delay spread.The variance of the frequency domain transfer node is givenby
σ2Δ,f = 2− 2 · Re
⎧⎨⎩ωf
στ·
∞∫0
exp(−2jπFτ) exp (−τ/στ ) dτ
⎫⎬⎭
= 2− 2 · Re
{ωf
1 + j2πστF
}. (15)
By setting ωf = 11−j2πστF
, (15) is minimized and results in
σ2Δ,f = 2
(1− 1
1 + 4π2σ2τF
2
). (16)
2) Time Domain: Analogous to the frequency domain,channel coefficients of adjacent OFDM symbols are connectedwith a transfer node, modeling the time-variant channel vari-ations. The variance of adjacent channel coefficients in thetime domain is determined by calculating (10) between twoadjacent OFDM symbols.
Assuming a uniform Doppler power spectral density definedover the interval [−fD,max, fD,max], the variance of σ2
Δ,t
yieldsσ2Δ,t = 2
(1− sinc (2fD,maxTs)
), (17)
where fD,max and Ts denote the maximum Doppler frequencyand the OFDM symbol duration. Due to the symmetric distri-bution of the Doppler frequencies, the time domain correlationfunction is real valued and thus, the tuning factor is set toωt=1.
A commonly used distribution of the Doppler frequenciesis given by the Jakes power spectral density [36], for whichthe variance of σ2
Δ,t results in
σ2Δ,t = 2
(1− J0 (2πfD,maxTs)
), (18)
where J0 (·) is the Bessel function of the first kind and orderzero.
3) Spatial Domain: The variance of the transfer node inthe spatial domain between neighboring transmit antennas isdependent on multiple parameters: Namely, the spacing oftransmit antennas dTx, the wavelength λ, and the distributionof the azimuth angle of departure ϕ. Starting from (10),the variance of the spatial domain (considering only transmitantennas) can be expressed by
σ2Δ,s = 2
⎛⎜⎜⎜⎝1−Re
[E
{ωs exp
(j2π
dTx
λsin(ϕ)
)}]︸ ︷︷ ︸
C
⎞⎟⎟⎟⎠ .
(19)
In the following, a uniform distribution of the angular spread ϕwithin the interval [φ+ Θ
2 , φ− Θ2 ] is assumed. With the spatial
autocorrelation function given in [37], C can be rewritten as
C=Re
⎡⎢⎢⎢⎢⎣ωs·
⎛⎜⎜⎜⎜⎝J0(z) + 2 ·
∞∑m=1
J2m(z) cos(2mφ)sin(2mΘ)
2mΘ︸ ︷︷ ︸A
+
j 2
∞∑m=0
J2m+1(z) sin((2m+ 1)φ)sin((2m+ 1)Θ)
(2m+ 1)Θ︸ ︷︷ ︸B
⎞⎟⎟⎟⎟⎠
⎤⎥⎥⎥⎥⎦ ,
(20)
with z = 2π dTxλ . To determine the spatial tuning factor
ωs = exp(jx), which maximizes C, the derivative dC/dx isset to zero:
x = tan−1
(−B
A
), (21)
which results in the tuning factor
ωs = exp
(j tan
(−B
A
)). (22)
Inserting (22) into (19) yields
σ2Δ,s = 2
(1−|A|√A2 +B2
A
). (23)

1604 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 60, NO. 6, JUNE 2012
Fig. 5. Message exchange at a coefficient node.
For an azimuth angle of φ = 0◦, ωs = 1 and the calculationof the variance in spatial domain can further be simplified as
σ2Δ,s = 2
(1− sinc
(dTx
λΘ
)). (24)
Apart from the uniform distribution, typical distributions ofthe azimuth angle of departure are the von Mises distributionor the Laplacian distribution [38].
Given identical distributions, the rule to calculate the vari-ance is independent of the domain, as can be seen from(13), (17), and (24). In case that fading is present in onedomain only, the same uncoded BER and/or mean squarederror (MSE) performance is achieved, independent in whichdomain the fading occurs. This property is elaborated furtherin Section IV-A.
D. Information Exchange at Coefficient Nodes
In general, a message generated at a node of a factor graphneeds to consider all adjacent nodes, except the node for whichthe message is generated, so to ensure that only extrinsicmessages are exchanged. For a node that is connected to Nother nodes, N−1 incoming messages have to be processed inorder to generate one outgoing message. For the MD-GSIR,a coefficient node is connected to two transfer nodes in eachdomain (time, frequency or space) and one symbol node, asillustrated in the left part of Fig. 5.
Suppose a channel coefficient receives the messagespj(h) ∼ CN (μj , σ
2j
), j ∈ {1, . . . , N} from N adjacent trans-
fer nodes. The product of Gaussian pdfs results in a complex-valued normal distribution⎛
⎝ N∏j=1,j �=i
pj(h)
⎞⎠ = pi (h) , (25)
with mean and variance
μi =
N∑j=1,j �=i
μj
σ2j
N∑j=1,j �=i
1σ2j
, σ2i =
1N∑
j=1,j �=i
1σ2j
. (26)
The exchange of extrinsic messages is depicted in theright part of Fig. 5. The combined message, denotedby p(hi
n,m) ∼ CN (μi,n,m[l, k], σ2i,n,m[l, k]
), is subsequently
sent to an observation node.
E. Soft Data Detection
Utilizing the updated message received from a coefficientnode p
(hin,m
), an observation node yn calculates
p (yn|xm) =
∫p(yn|hi
n,m, xm
)p(hin,m
)dhn,m (27)
=1
π(σ2i,n,m|xm|2+σ2
v,n,m
) ·exp
(−|yn−μi,n,mxm−μv,n,m|2
σ2i,n,m|xm|2+σ2
v,n,m
). (28)
It is important to emphasize that besides the variance of theeffective noise also the variance of the channel coefficient isconsidered in the denominator. Hence, an unreliable channelestimate reduces the log-likelihood ratio for the correspondingdata symbol.
For the calculation of the soft outputs, in the numericalresults we choose the joint Gaussian detector [39]. The LLRof bit bm,ν contained in data symbol xm is approximated as
LLR (bm,ν) ≈ maxxm,0
(−|yn − μi,n,mxm − μv,n,m|2
|xm|2σ2i,n,m + σ2
v,n,m
)−
maxxm,1
(−|yn − μi,n,mxm − μv,n,m|2
|xm|2σ2i,n,m + σ2
v,n,m
),
(29)
with xm,0, xm,1 ∈ xm(bm,ν = 0), xm(bm,ν = 1). Apart fromthe joint Gaussian detector, there exist many alternatives tocalculate the exact or approximate LLRs of bm,ν , e.g. optimumMAP detection or the max-log approximation [40].
F. Message Exchange Scheduling
The structure of the underlying factor graph is a trade-offbetween complexity and performance. It is well known thatshort cycles deteriorate the performance of the sum-productalgorithm. Short cycles occur when a message, which leavesa node, ’travels’ only a few nodes until it is send back to its ori-gin. Strategies have been developed that merge several nodesin order to prevent short cycles in the message exchange. Thisinherently involves higher computational complexity w.r.t. themessage generation. The presented symbol-wise factor graphstructure exhibits a low computational complexity. Hence,message scheduling plays an important role to achieve a goodperformance.
For a factor graph with cycles, message scheduling shouldensure that the message a node receives contains as few infor-mation of the node itself. Related to MD-GSIR, this means thatmessages of different domains should be exchanged succes-sively, e.g., messages are exchanged in the time domain first,afterwards messages are exchanged in the frequency domain,or vice versa. The underlying principle is dubbed “two-wayschedule” in [41]. A message is sent from a coefficient node toa transfer node and from there to the next coefficient node inthe same domain; thus producing a burst that traverses in thedirection of the desired domain. If the last coefficient node ofthe selected domain is reached, messages are propagated in thereversed direction. The two-way schedule is finished when thecoefficient node that started the message exchange receives a

KNIEVEL et al.: MULTI-DIMENSIONAL GRAPH-BASED SOFT ITERATIVE RECEIVER FOR MIMO-OFDM 1605
TABLE IPARAMETERS OF THE SYMMETRIC AND THE WINNER C2 NLOS CHANNEL
Symmetric channel model WINNER channel modelNormalized fading Distribution Normalized fading Distribution
Time domain 0.01 uniform 0.0106 JakesFrequency domain 0.01 uniform 0.0277 expTransmitter topology Uniform linear array 10 λ spacing Uniform linear array 10 λ spacingAzimuth angle of departure 0◦ Distributed according to [33]Angular spread 14◦ 35◦
Carrier frequency fc = 4 GHzOFDM subcarrier spacing F = 15 kHzOFDM symbol duration Ts = 71.43μs
message. The schedule hereby ensures that incoming messagesare the combination of the maximum number of outgoingmessages of one domain.
An alternative scheduling is given by the “flooding” sched-ule [41], which distributes the messages simultaneously in alldomains. However, messages arriving at a node may containintrinsic information with this schedule, which leads to adegradation w.r.t. performance.
The scheduling also determines which domain exchanges itsinformation first. During initialization, all messages are set tozero mean and a large variance, except for the training symbolswhere the mean value is known and the variance is determinedby AWGN. If messages of one domain with a low variancehave already been exchanged, messages with a larger variancecontribute less to the overall message generation. It is thereforerecommended that the domain with the largest variance shouldbe exchanged first; unless the variance exceeds a certainthreshold, in which case messages in this domain should notbe sent first. To this end, in case dTx � λ, the varianceof the spatial domain between transmit antenna elements istypically beyond such a threshold. Although these messagesare considered to be unreliable, they nevertheless contributeto a performance improvement in subsequent iterations asdemonstrated in Section IV.
IV. NUMERICAL RESULTS
The performance of MD-GSIR is evaluated by means ofMonte Carlo simulations for two different channel models.First, a symmetric channel model with a uniform distributionof all dispersion parameters in time, frequency and space.The symmetric channel model allows to analyze the possibleimprovements of each additional dimension that is utilized bythe graph based receiver. Second, a macro cellular channelmodel that represents realistic channel conditions of an urbanenvironment [33]. The parameters chosen for the symmetricas well as the WINNER channel model are given in Table I.
Three variants of MD-GSIR are investigated, which arecharacterized by the number of utilized channel dimensions.1D-GSIR takes into account only channel variations in thefrequency domain, whereas 2D-GSIR utilizes channel vari-ations in both time and frequency domains. Finally, 3D-GSIR exploits channel correlation in three dimensions; time,frequency and space. The system parameters are summarizedin Table II.
The performance of MD-GSIR is compared with two state-of-the-art receivers: (i) a non-iterative receiver with ML de-tection and 2D channel estimation by Wiener filtering; and
TABLE IIPARAMETERS OF THE SIMULATION SETUP
Symmetric WINNERchannel model channel model
No. of OFDM subcarriers L = 64 L = 64No. of OFDM symbols K = 64 K = 32No. of transmit antennas NT = 8 NT = 2/4No. of receive antennas NR = 8 NR = 4Training spacing Dt=16/32 Dt = 16
Df=16/32 Df = 16Ds = 1 Ds = 1
Modulation BPSK QPSK / 16-QAMChannel code (code rate) Repetition code Turbo code
R=1/4 R=1/3,1/2,3/4No. of iterations 10 10
(ii) an iterative receiver with APP detection and EM-basedchannel estimation. Specifically, for channel estimation anextension of the EM termed space alternating generalized EM(SAGE) algorithm has been implemented [20], which offersfaster convergence.
Note that the computational complexity of the comparisonalgorithms based on ML or APP detection increases exponen-tially with the modulation order and the number of transmitantennas. Thus, these algorithms can become infeasible forhigher-order modulation and multiple transmit antennas. Onthe other hand, MD-GSIR employs a Gaussian detector and,hence, the complexity is significantly lower than ML and/orAPP detection. Furthermore, the complexity is linear w.r.t.the number of transmit and receive antennas, the number ofdimensions, as well as the modulation order.
A. Symmetric Channel Model
Apart from a symmetric channel model with equivalentdispersion parameters in each dimension, a symmetric framestructure in time and frequency domain is adopted. The framestructure as well as the channel code was chosen in such away that simulation effects, e.g. limited sequence length and/oredge effects, affect the time, frequency, and spatial domainsimilarly. An 8×8 MIMO system with BPSK modulation isimplemented and the number of OFDM symbols and OFDMsubcarriers are set to K=L=64. As forward error correction arepetition code was chosen as its performance is independentof the system parameters, unlike convolutional/turbo/LDPCcodes which improve e.g. with increased sequence length.
The BER curves for the 1D, 2D and 3D-GSIR are shownin Fig. 6. Although the variance of the transfer nodes ofthe spatial domain is larger than that of the time and/or

1606 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 60, NO. 6, JUNE 2012
Fig. 6. BER performance of the MD-GSIR with eight transmit and eightreceive antennas for different training spacings in a symmetric channel model.
frequency domain, an almost constant improvement with eachadditional domain can be observed. For a training spacing ofDt = Df = 16 the performance improves by approximately3.5 dB from 1D to 2D to 3D-GSIR at a BER of 10−3.Increasing the training spacing to Dt = Df = 32 leads toa severe performance degradation for 1D-GSIR whereas 2D-GSIR and 3D-GSIR achieve similar performance as for Dt =Df = 16. The performance degradation of 3D-GSIR w.r.t. 2D-GSIR with perfect channel knowledge is roughly 2 dB. Theuniformly distributed dispersion parameters of the symmetricchannel model are a challenging environment for channelestimation and may be viewed as the worst-case scenario.Improving the quality of the initial channel estimates furtherimproves performance of MD-GSIR, which is examined in acompanion paper [42].
B. WINNER Channel Model
The macro cellular channel model WINNER C2 withoutline-of-sight (LOS) propagation path represents more realisticchannel conditions [33]. The number of OFDM symbols andsubcarriers is set to K=32 and L=64, and a fixed number of10 global iterations is used for both MD-GSIR, as well as theSAGE estimator with APP detection. The observed Dopplerfrequencies fD are distributed according to the Jakes spectrum.Perfect knowledge about the exponentially decaying powerdelay profile specified in [33] is assumed for the calculationof the transfer node variance (16) in the frequency domain.The tuning factors in (7) for the time and frequency domainsare set to ωt=1 and ωf=τmax/8, respectively.
The performance of the GSIR depends on several parame-ters including training density as well as the training pattern.Due to the structure of the factor graph, training symbolsare treated the same way as data symbols. Although arbitrarytraining patterns are possible, due to the message scheduling,it is beneficial to employ a distributed training pattern, sincethe variance of the estimated channel coefficients is kept ata comparable level throughout. Therefore, a training patternwith diamond structure (cf. Fig. 1) is adopted here for allnumerical evaluations.
1) EXIT Chart Analysis: EXIT charts [43], [44] are apowerful tool to analyze the convergence behavior of iterative
Fig. 7. EXIT chart analysis of the MD-GSIR at an SNR of 6 dB,and a varying spacing of training symbols in time and frequency domain.Additionally the transfer characteristics of MD-GSIR with perfect channelknowledge and a turbo code with code rate R=1/3 are included.
receivers. Initially developed for the convergence analysis ofiterative forward error codes, it has been adopted to a varietyof applications.
The transfer characteristic of MD-GSIR for an SNR of 6 dBis examined in Fig. 7. The density of the training symbolsdetermines the starting point on the left side, as well as theslope of the transfer characteristic. The slope of the transfercharacteristic gets steeper as the training density decreases(i.e. larger training spacings Dt and Df). If the transfercharacteristic is steep, the BER improves with iterations, sincethe output extrinsic information IE becomes more reliableas the input a priori information IA increases. Hence, thelower the training density, the more is MD-GSIR able togain from reliably detected data symbols. The flat section ofMD-GSIR in the range 0 ≤ IA ≤ 0.6 indicates that datasymbols contribute only marginally to the message generation.With increasing reliability, and in turn decreasing variance, thecontribution of data symbols improve performance.
The transfer characteristic of 2D-GSIR in Fig. 7 is superiorto that of 1D-GSIR, which leverages convergence at lowerSNR values. Alternatively, 2D-GSIR retains the same transfercharacteristic as 1D-GSIR at lower training density. The differ-ence between 2D-GSIR and 3D-GSIR is only marginal. Thecurves of the MD-GSIR with imperfect channel knowledgedo not converge in the upper right corner since full a prioriinformation (IA = 1) is only achieved for data symbols butnot for channel coefficients. For comparison the transfer char-acteristics of the MD-GSIR with perfect channel knowledgeand a turbo code with code rate R=1/3 are included inFig. 7. A crossing of the characteristics of the turbo codeand 1D-GSIR is observed at an early stage, which preventsconvergence. On the other hand, a tunnel opens betweenthe transfer characteristics of 2D and 3D-GSIR and that ofthe turbo code, and hence they are able to converge. Thisobservation is exemplified by the BER performance discussed

KNIEVEL et al.: MULTI-DIMENSIONAL GRAPH-BASED SOFT ITERATIVE RECEIVER FOR MIMO-OFDM 1607
Fig. 8. BER performance of the MD-GSIR for 2×4 MIMO with QPSK and16-QAM modulation, a turbo code with rate R=1/3, and training symbolspacings Dt=Df=16. For comparison a GSIR with perfect channel stateinformation (p. CSI), a non-iterative ML detector as well as an iterative APPdetector are included.
below.2) Bit Error Performance: Fig. 8 shows BER results for
MD-GSIR with QPSK and 16-QAM modulation employingtwo transmit and four receive antennas. A turbo code withrate R=1/3 is applied in combination with the trainingsymbol spacings Dt=Df=16 in time and frequency domain.The curves for ML and APP detection as well as 2D-GSIRwith perfect channel knowledge are included for comparison.For QPSK the difference between 2D and 3D-GSIR is onlymarginal, as predicted by the EXIT chart analysis in Fig. 7.
The comparatively small gain of 3D-GSIR w.r.t. 2D-GSIRis reasoned in the low correlation of the transmit antennas. Onthe other hand, 2D and 3D-GSIR outperform the ML and APPdetectors by about 2.5 dB. For 16-QAM modulation 3D-GSIRconverges 0.5 dB earlier than 2D-GSIR at an SNR of 8 dB.Also for 16-QAM modulation 3D-GSIR outperforms the non-iterative ML detector and converges 5.5 dB earlier. While theiterative APP detector is able to improve BER performanceby roughly 1.5 dB compared to the non-iterative ML detector,3D-GSIR attains a 3.5 dB gain over the APP detector. Theperformance loss due to channel estimation is about 2 dB for3D-GSIR with QPSK and 16-QAM modulation, respectively.
Fig. 9 plots BER results of 2D and 3D-GSIR for 4×4MIMO with QPSK modulation and different code rates(R=1/2 and R=3/4). In Fig. 9 the robustness of the proposedreceiver is examined, by comparing the results of a ‘matched’GSIR, which has perfect knowledge of all dispersion param-eters of the transfer function (7), with a ‘mismatched’ GSIR,where channel correlations are approximated by a uniform dis-tribution. 3D-GSIR outperforms 2D-GSIR for both code rates.Additionally, the difference between matched and mismatchedreceiver is less for 3D-GSIR than for the 2D GSIR. Hence,additional correlation information enhances performance, aswell as robustness of the graph-based receiver. 3D-GSIR isabout 2.5 dB and 3 dB worse compared to the GSIR withperfect channel knowledge (p. CSI) given a code rate R=1/2and R=3/4, respectively. Higher code rates require additionaliterations and/or enhanced initialization for the MD-GSIR toimprove its performance.
Fig. 9. BER performance of MD-GSIR for 4 × 4 MIMO with QPSKmodulation and different code rates. The solid and dashed lines denote amatched and mismatched calculation of transfer variances, respectively. Forcomparison a GSIR with perfect channel state information is included.
V. CONCLUSION
A novel soft iterative channel estimation and data detectionscheme for MIMO-OFDM over multi-selective channels ispresented in this paper. Messages representing estimates ofthe channel coefficients and data symbols are efficiently gen-erated according to the sum-product algorithm and distributedthroughout the factor graph via transfer nodes. Closed-formderivations for the transfer nodes in time, frequency andspace are presented, which are able to accurately model thefading process of a mobile radio channel in three dimensions.Reliability information of both data symbols and channelestimates are used to iteratively refine each other.
Simulation results show that a gain of 3 dB with each ad-ditional domain can be achieved for a triply-selective channelmodel and i.i.d. dispersion parameters in all domains. Forthe more realistic WINNER C2 channel model, the multi-dimensional graph-based receiver outperforms non-iterativeand iterative state of the art algorithms. The complexity ofthe proposed MD-GSIR is greatly reduced by implementingthe joint Gaussian approach compared to ML or APP detectionalgorithms. The graph can easily be extended to take additionaldimensions into account, such as correlation between receiveantennas and/or polarization of antennas.
REFERENCES
[1] J. K. Cavers, “An analysis of pilot symbol assisted modulation forRayleigh fading channels,” IEEE Trans. Veh. Technol., vol. 40, no. 4,pp. 686–693, Nov. 1991.
[2] N. W. K. Lo, D. D. Falconer, and A. U. H. Sheikh, “Adaptive equaliza-tion and diversity combining for mobile radio using interpolated channelestimates,” IEEE Trans. Veh. Technol., vol. 40, no. 3, pp. 636–645, Aug.1991.
[3] P. Hoeher, “TCM on frequency-selective land-mobile fading channels,”in Proc. 1991 Tirrenia Int. Workshop Digital Commun., E. Biglieriand M. Luise, editors, Coded Modulation and Bandwidth-EfficientTransmission. Elsevier Science Publishers, 1991, pp. 317–328.
[4] P. Hoeher, S. Kaiser, and P. Robertson, “Two-dimensional pilot-symbol-aided channel estimation by Wiener filtering,” in Proc. 1997 IEEE Int.Conf. Acoustics, Speech, Signal Processing, pp. 1845–1848.
[5] G. Auer, “Channel estimation in two dimensions for OFDM systemswith multiple transmit antennas,” in Proc. 2003 IEEE Global Commun.Conf., pp. 322–326.

1608 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 60, NO. 6, JUNE 2012
[6] M. Stege, P. Zillmann, and G. Fettweis, “MIMO channel estimationwith dimension reduction,” in Proc. 2002 Int. Symp. Wireless PersonalMultimedia Commun., pp. 417–421.
[7] H. Miao and M. J. Juntti, “Space-time channel estimation and per-formance analysis for wireless MIMO-OFDM systems with spatialcorrelation,” IEEE Trans. Veh. Technol., vol. 54, no. 6, pp. 2003–2016,Nov. 2005.
[8] J.-W. Choi and Y.-H. Lee, “Complexity-reduced channel estimation inspatially correlated MIMO-OFDM systems,” IEICE Trans. Commun.,vol. E90-B, no. 9, pp. 2609–2612, Sep. 2007.
[9] G. Auer, “3D MIMO-OFDM channel estimation,” IEEE Trans. Com-mun., to be published.
[10] G. J. Foschini and M. J. Gans, “On limits of wireless communicationsin a fading environment when using multiple antennas,” Wireless Pers.Commun., vol. 6, no. 3, pp. 311–335, Mar. 1998.
[11] I. E. Telatar, “Capacity of multi-antenna Gaussian channels,” EuropeanTrans. Telecommun. (ETT), vol. 10, no. 6, pp. 585–595, Nov./Dec. 1999.
[12] B. Hassibi and B. M. Hochwald, “How much training is needed inmultiple-antenna wireless links?” IEEE Trans. Inf. Theory, vol. 49, no. 4,pp. 951–963, Apr. 2003.
[13] M. C. Valenti and B. D. Woerner, “Iterative channel estimation anddecoding of pilot symbol assisted turbo codes over flat-fading channels,”IEEE J. Sel. Areas Commun., vol. 19, no. 9, pp. 1697–1705, Sep. 2001.
[14] F. Sanzi, S. Jelting, and J. Speidel, “A comparative study of iterativechannel estimators for mobile OFDM systems,” IEEE Trans. WirelessCommun., vol. 5, no. 2, pp. 849–859, Sep. 2003.
[15] C. Cozzo and B. Hughes, “Joint channel estimation and data detectionin space-time communications,” IEEE Trans. Commun., vol. 51, no. 8,pp. 1266–1270, Aug. 2003.
[16] G. Auer and J. Bonnet, “Threshold controlled iterative channel esti-mation for coded OFDM,” in Proc. 2007 IEEE Veh. Technol. Conf. –Spring, pp. 1737–1741.
[17] B. Lu, X. Wang, and Y. Li, “Iterative receivers for space-time blockcoded OFDM systems in dispersive fading channels,” in Proc. 2001IEEE Global Commun. Conf., pp. 514–518.
[18] Y. Xie and C. N. Georghiades, “Two EM-type channel estimationalgorithms for OFDM with transmitter diversity,” IEEE Trans. Commun.,vol. 51, no. 1, pp. 106–115, Jan. 2003.
[19] M. Khalighi and J. J. Boutros, “Semi-blind channel estimation using theEM algorithm in iterative MIMO APP detectors,” IEEE Trans. WirelessCommun., vol. 5, no. 11, pp. 3165–3173, Nov. 2006.
[20] J. Ylioinas and M. Juntti, “Iterative joint detection, decoding, andchannel estimation in turbo-coded MIMO-OFDM,” IEEE Trans. Veh.Technol., vol. 58, no. 4, pp. 1784–1796, May 2009.
[21] A. P. Worthen and W. E. Stark, “Unified design of iterative receiversusing factor graphs,” IEEE Trans. Inf. Theory, vol. 47, no. 2, pp. 843–849, Feb. 2001.
[22] F. R. Kschischang, B. J. Frey, and H.-A. Loeliger, “Factor graphs andthe sum-product algorithm,” IEEE Trans. Inf. Theory, vol. 47, no. 2, pp.498–519, Feb. 2001.
[23] H.-A. Loeliger, J. Dauwels, J. Hu, S. Korl, L. Ping, and F. R. Kschis-chang, “The factor graph approach to model-based signal processing,”Proc. IEEE, vol. 95, no. 6, pp. 1295–1322, June 2007.
[24] C. Novak, G. Matz, and F. Hlawatsch, “Factor graph based designof an OFDM-IDMA receiver performing joint data detection, channelestimation, and channel length selection,” in Proc. 2009 IEEE Int. Conf.Acoustics, Speech, Signal Processing, pp. 2561–2564.
[25] Y. Zhu, D. Guo, and M. L. Honig, “A message-passing approach forjoint channel estimation, interference mitigation and decoding,” IEEETrans. Wireless Commun., vol. 8, no. 12, pp. 6008–6018, Dec. 2009.
[26] D. Fertonani, A. Barbieri, and G. Colavolpe, “Novel graph-basedalgorithms for soft-output detection over dispersive channels,” in Proc.2008 IEEE Global Commun. Conf.
[27] H. Niu, M. Shen, J. Ritcey, and H. Liu, “A factor graph approach toiterative channel estimation and LDPC decoding over fading channels,”IEEE Trans. Wireless Commun., vol. 4, no. 4, pp. 1345–1350, July 2005.
[28] G. E. Kirkelund, C. N. Manchon, L. P. B. Christensen, E. Riegler, andB. H. Fleury, “Variational message-passing for joint channel estimationand decoding in MIMO-OFDM,” in Proc. 2010 IEEE Global Commun.Conf.
[29] T. Wo, J. C. Fricke, and P. A. Hoeher, “A graph-based iterative Gaussiandetector for frequency-selective MIMO channels,” in Proc. 2006 IEEEInf. Theory Workshop, pp. 581–585.
[30] T. Wo, C. Liu, and P. A. Hoeher, “Graph-based iterative Gaussiandetection with soft channel estimation for MIMO systems,” in Proc.2008 Int. ITG-Conf. Source Channel Coding.
[31] ——, “Graph-based soft channel and data estimation for MIMO systemswith asymmetric LDPC codes,” in Proc. 2008 IEEE Int. Conf. Commun.,pp. 620–624.
[32] Z. Shi, T. Wo, P. A. Hoeher, and G. Auer, “Graph-based soft iterativereceiver for higher-order modulation,” in Proc. 2010 IEEE Int. Conf.Commun. Technol.
[33] IST-4-027756 WINNER II, “D1.1.2 WINNER II channel models,” Sep.2007.
[34] P. Hoeher, “A statistical discrete-time model for the WSSUS multipathchannel,” IEEE Trans. Veh. Technol., vol. 41, no. 4, pp. 461–468, Nov.1992.
[35] M. R. Yazdani, S. Hemati, and A. H. Banihashemi, “Improving beliefpropagation on graphs with cycles,” IEEE Commun. Lett., vol. 8, no. 1,p. 57, Jan. 2004.
[36] W. C. Jakes, Microwave Mobile Communications. John Wiley & SonsInc., 1975.
[37] J. Salz and J. Winters, “Effect of fading correlation on adaptive arraysin digital mobile radio,” IEEE Trans. Veh. Technol., vol. 43, no. 4, pp.1049–1057, Nov. 1994.
[38] B. H. Fleury, “First and second-order characterization of directiondispersion and space selectivity in the radio channel,” IEEE Trans. Inf.Theory, vol. 46, no. 6, pp. 2027–2044, Sep. 2000.
[39] L. Liu, W. K. Leung, and L. Ping, “Simple iterative chip-by-chipmultiuser detection for CDMA systems,” in Proc. 2003 IEEE Veh.Technol. Conf. – Spring, pp. 2157–2161.
[40] P. Robertson, P. Hoeher, and E. Villebrun, “Optimal and sub-optimalmaximum a posteriori algorithms suitable for turbo decoding,” EuropeanTrans. Telecommun., vol. 8, no. 2, pp. 119–125, Mar./Apr. 1997.
[41] F. R. Kschischang and B. J. Frey, “Iterative decoding of compoundcodes by probability propagation in graphical models,” IEEE J. Sel.Areas Commun., vol. 16, no. 2, pp. 219–230, Feb. 1998.
[42] C. Knievel, P. A. Hoeher, G. Auer, and A. Tyrrell, “Particle swarmenhanced graph-based channel estimation for MIMO-OFDM,” in Proc.2011 IEEE Veh. Technol. Conf. – Spring.
[43] S. ten Brink, “Convergence behavior of iteratively decoded parallelconcatenated codes,” IEEE Trans. Commun., vol. 49, pp. 1727–1737,Oct. 2001.
[44] S. ten Brink, G. Kramer, and A. Ashikhmin, “Design of low-densityparity-check codes for modulation and detection,” IEEE Trans. Com-mun., vol. 52, no. 4, pp. 670–678, Apr. 2004.
Christopher Knievel (S’11) received the Dipl.-Ing.degree in electrical engineering from the Universityof Kiel, Germany, in 2009. He is currently workingtowards his Dr.-Ing. (Ph.D.) degree at the Informa-tion and Coding Theory Lab, University of Kiel.
His research interests include iterative receiveralgorithms in multiple-input multiple-output multi-carrier systems, and evolutionary algorithms andtheir application to channel estimation.
Peter Adam Hoeher (SM’97) received Dipl.-Ing.(M.Sc.) and Dr.-Ing. (Ph.D.) degrees in electrical en-gineering from RWTH Aachen University, Aachen,Germany, and the University of Kaiserslautern,Kaiserslautern, Germany, in 1986 and 1990, respec-tively.
From October 1986 to September 1998, he hasbeen with the German Aerospace Center (DLR),Oberpfaffenhofen, Germany. From December 1991to November 1992, he was on leave at AT&T BellLaboratories, Murray Hill, NJ.
In October 1998, he joined the University of Kiel, Germany, where he isa professor of electrical and information engineering. His research interestsare in the general area of communication theory and applied informa-tion theory with applications in wireless communications and underwatercommunications, including advanced digital modulation techniques, channelcoding, iterative processing, equalization, multiuser detection, interferencecancellation, channel estimation, and joint communication and navigation.
Dr. Hoeher received the Hugo-Denkmeier-Award (’90) and the ITG award(’07). Between 1999 and 2006, he served as an Associated Editor for theIEEE TRANSACTIONS ON COMMUNICATIONS.

KNIEVEL et al.: MULTI-DIMENSIONAL GRAPH-BASED SOFT ITERATIVE RECEIVER FOR MIMO-OFDM 1609
Alexander Tyrrell studied at the Ecole Supérieured’Ingénieurs en Electronique et Electrotechnique(ESIEE) in Paris, France, where he received amaster’s degree in electrical engineering, with amajor in signal processing and telecommunications,in 2005. Parallel to his final year, he did a master’sof research in digital telecommunications systemsat the Ecole Nationale Supérieure des Télécommu-nications (ENST) in Paris, France. From 2005 to2009, he worked towards his Ph.D. on the topic ofdecentralized synchronization for wireless networks
in DOCOMO Euro-Labs in Munich, Germany, together with KlagenfurtUniversity, Austria. Afterwards, he worked as a researcher in the area ofwireless communications with DOCOMO Euro-Labs until May 2011, and isnow working at Rohde & Schwarz in Munich, Germany, as a protocol stackdeveloper for 3GPP LTE systems.
Gunther Auer (M’02) received the Dipl.-Ing. de-gree in electrical engineering from the UniversitätUlm, Germany, in 1996, and the Ph.D. degree fromthe University of Edinburgh, UK, in 2000. From2000 to 2001, he was a research and teaching assis-tant with the Universität Karlsruhe (TH), Germany.Since 2001, he has been with NTT DOCOMOEuro-Labs, Munich, Germany, where he is a teamleader and research manager in wireless technolo-gies research. His research interests include green ra-dio, self-organized networks, and multi-carrier based
communication systems, in particular, medium access, cross-layer design,channel estimation, and synchronization techniques.