MODULO SISTEMAS DINAMICOS
291
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA PROGRAMA DE INGENIERÍA ELECTRÓNICA 201527 – SISTEMAS DINÁMICOS DIEGO FERNANDO SENDOYA LOSADA Director Nacional JAIRO HERNAN LOPEZ BAYONA Acreditador NEIVA Julio de 2009
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of MODULO SISTEMAS DINAMICOS
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA
PROGRAMA DE INGENIERÍA ELECTRÓNICA
201527 – SISTEMAS DINÁMICOS
DIEGO FERNANDO SENDOYA LOSADA Director Nacional
JAIRO HERNAN LOPEZ BAYONA Acreditador
NEIVA Julio de 2009

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
ASPECTOS DE PROPIEDAD INTELECTUAL Y VERSIONAMIENTO
El presente módulo fue diseñado en el año 2007 por el ingeniero Diego Fernando Sendoya Losada, tutor de la UNAD, y ubicado en el CEAD de Neiva, el ingeniero Sendoya es Ingeniero Electrónico de la Universidad Surcolombiana, especialista en Automatización Industrial de la Universidad de Ibagué, y candidato a Master de la misma universidad, se ha desempeñado como tutor de la UNAD desde el 2005 hasta el año 2009 y ha sido catedrático de diversas universidades del departamento del Huila. El presente módulo ha tenido dos actualizaciones desarrolladas por el mismo ingeniero Sendoya en los años 2008 y 2009. El ingeniero Sendoya se desempeña actualmente como director del cuso a nivel nacional. En el año 2009 el ingeniero Jairo Hernán López Bayona, tutor del CEAD Sogamoso, apoyó el proceso de revisión de estilo del módulo y dio aportes disciplinares, didácticos y pedagógicos en el proceso de acreditación de material didáctico desarrollado en el mes de JULIO de 2009.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
INTRODUCCIÓN El curso de Sistemas Dinámicos es de tipo metodológico, pertenece al campo de formación profesional específico y es ofrecido dentro del portafolio de cursos específicos para el área profesional del programa de tecnología e ingeniería electrónica de la Universidad Nacional Abierta y a Distancia – UNAD. Tiene como objetivo principal desarrollar en el estudiante la habilidad para el manejo de un conjunto de herramientas analíticas que le permitan modelar y analizar plantas y sistemas de control lineales e invariantes en el tiempo tanto continuo como discreto; todo esto a través de la estrategia de educación abierta y a distancia. El curso tiene 2 créditos académicos, los cuales comprenden el estudio independiente y el acompañamiento tutorial, con el propósito que el estudiante: • Reconozca sistemas dinámicos lineales e invariantes en el tiempo y esté en
capacidad de modelarlos matemáticamente para conocer su respuesta a través de los diagramas obtenidos con un proceso matemático.
• Pueda analizar la estabilidad de los sistemas de control, a partir de los
modelos matemáticos de los sistemas dinámicos. • Comparta sus logros, experiencias y dudas con su tutor y sus compañeros de
curso, futuros colegas. • Desarrolle procesos y habilidades necesarias para su continua formación en el
ámbito personal, social y profesional. Este curso está compuesto por DOS (2) unidades didácticas, a saber: Unidad 1. Representación de los Sistemas Dinámicos. Trata en primer lugar, los aspectos introductorios y la terminología referente al área de control, en segundo lugar, introduce y refuerza el manejo matemático necesario para el modelado de los sistemas dinámicos, como lo es la transformada de Laplace y la transformada Z, y en tercer lugar trata las diferentes representaciones que se pueden utilizar para analizar los sistemas dinámicos.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Unidad 2. Análisis de los sistemas dinámicos. Trata los diferentes métodos de análisis que se utilizan en control, como son el análisis en el dominio del tiempo, el análisis en el dominio de la frecuencia, análisis mediante el lugar geométrico de las raíces y análisis en el espacio de estados. La metodología a seguir será bajo la estrategia de educación a distancia. Por tal razón, será importante planificar los procesos de: • Estudio Independiente: este se desarrollará a través del trabajo personal y
del trabajo en pequeños grupos colaborativos de aprendizaje. • Acompañamiento tutorial: corresponde al acompañamiento que el tutor
realiza al estudiante para potenciar el aprendizaje y la formación. Este acompañamiento se puede adelantar de forma individual, en pequeños grupos o a nivel de grupo de curso.
La evaluación del curso se define como cualitativa - participativa, y mide la calidad de los procesos y productos de aprendizaje. Se evidencia desde las formas de: • Autoevaluación: evaluación que realiza el estudiante para valorar su propio
proceso de aprendizaje. • Coevaluación: se realiza a través de los grupos colaborativos, y pretende la
socialización de los resultados del trabajo personal. • Heteroevaluación: Es la valoración que realiza el tutor del proceso de
aprendizaje. Otro aspecto a considerar dentro del curso es el sistema de interactividades, el cual vincula a los actores del proceso mediante diversas actividades de aprendizaje que orientan el trabajo de los estudiantes hacia el logro de los objetivos que se pretenden. Se puede dar de la siguiente manera: • Tutor-estudiante: a través del acompañamiento individual. • Estudiante-estudiante: mediante la participación activa en los grupos
colaborativos de aprendizaje.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Estudiantes-tutor: a través del acompañamiento a los pequeños grupos
colaborativos de aprendizaje. • Tutor-estudiantes: mediante el acompañamiento en grupo de curso • Estudiantes-estudiantes: en los procesos de socialización que se realizan en
el grupo de curso. Para el desarrollo del curso es importante el papel que juegan los recursos didácticos y tecnológicos como medio activo e interactivo, buscando la interlocución durante todo el proceso de diálogo tutor-estudiante. Se tienen diferentes opciones y tecnologías, las cuáles deben ser empleadas de la mejor forma de acuerdo al espacio, y a los objetivos propuestos en cada curso. Algunas de las más empleadas, son: • Materiales virtuales: Son el soporte fundamental para el curso y para
favorecer los procesos de aprendizaje autodirigido. Estos contenidos serán publicados en la plataforma virtual de la UNAD.
• Sitios Web: propician el acercamiento al conocimiento, la interacción y la
producción de nuevas dinámicas educativas. • Sistemas de interactividades sincrónicas: permite la comunicación a través
de encuentros presénciales directos o de encuentros mediados (Chat, audio conferencias, videoconferencias, tutorías telefónicas).
• Sistemas de interactividades asincrónicas: permite la comunicación en
forma diferida favoreciendo la disposición del tiempo del estudiante para su proceso de aprendizaje (correo electrónico, foros, grupos de discusión, entre otros).
El acceso a documentos complementarios adquiere una dimensión de suma importancia, en tanto la información sobre el tema exige conocimientos de actualidad. En la medida que el estudiante interiorice y aplique los puntos abordados anteriormente, podrá obtener los logros propuestos en este curso, así como un

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
aprestamiento en los enfoques de la ingeniería mediante la estrategia de educación a distancia.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
INDICE DE CONTENIDO UNIDAD 1.......................................................................................................................................... 14 CAPITULO 1: SISTEMAS DE CONTROL ........................................................................................ 15 INTRODUCCIÓN............................................................................................................................... 15 Lección 1: ELEMENTOS DE UN SISTEMA DE CONTROL............................................................. 16 1. ELEMENTOS DE CONTROL........................................................................................................ 16 2. ELEMENTOS DE UN SISTEMA DE CONTROL AUTOMÁTICO ................................................. 18 3. TIPOS DE VARIABLES................................................................................................................. 21 4. SEÑALES DE COMUNICACIÓN .................................................................................................. 23 Lección 2: SISTEMAS CONTINUOS Y DISCRETOS....................................................................... 24 1. SISTEMAS DE CONTROL CONTINUOS..................................................................................... 24 2. SISTEMAS DE CONTROL DISCRETOS ..................................................................................... 25 3. EJEMPLOS DE SISTEMAS DE CONTROL ................................................................................. 27 Lección 3: TIPOS DE SISTEMAS DE CONTROL ............................................................................ 28 1. CONTROL EN LAZO CERRADO ................................................................................................. 29 2. CONTROL EN LAZO ABIERTO.................................................................................................... 29 Lección 4: EFECTOS DE LA REALIMENTACIÓN ........................................................................... 30 Lección 5: MÉTODOS DE CONTROL .............................................................................................. 33 1. MÉTODOS DE CONTROL CLÁSICO........................................................................................... 33 2. MÉTODOS DE CONTROL MODERNO........................................................................................ 34 3. MÉTODOS DE CONTROL AVANZADO....................................................................................... 35 CAPITULO 2: HERRAMIENTAS MATEMÁTICAS............................................................................ 37 INTRODUCCIÓN............................................................................................................................... 37 Lección 1: TRANSFORMADA DE LAPLACE ................................................................................... 40 1. FUNCIONES COMPLEJAS .......................................................................................................... 40 2. DEFINICIÓN DE LA TRANSFORMADA DE LAPLACE ............................................................... 43 3. TRANSFORMADA DE LAPLACE DE FUNCIONES ELEMENTALES ......................................... 45 3.1. Función Impulso ó Delta de Dirac .............................................................................................. 45 3.2. Función Escalón......................................................................................................................... 46 3.3. Función Rampa .......................................................................................................................... 47 3.4. Función Exponencial .................................................................................................................. 48 3.5. Función Senoidal........................................................................................................................ 49 Lección 2: PROPIEDADES Y TEOREMAS DE LA TRANSFORMADA DE LAPLACE.................... 52 1. MULTIPLICACIÓN POR UNA CONSTANTE ............................................................................... 52 2. LINEALIDAD.................................................................................................................................. 53 3. TRASLACIÓN COMPLEJA........................................................................................................... 53 4. TRASLACIÓN EN EL TIEMPO ..................................................................................................... 54 5. CAMBIO DE ESCALA ................................................................................................................... 54 6. DIFERENCIACIÓN REAL ............................................................................................................. 55 7. INTEGRACIÓN REAL ................................................................................................................... 56 8. DIFERENCIACIÓN COMPLEJA ................................................................................................... 57 9. TEOREMA DEL VALOR INICIAL.................................................................................................. 57 10. TEOREMA DEL VALOR FINAL .................................................................................................. 58 11. INTEGRAL DE CONVOLUCIÓN................................................................................................. 58 Lección 3: TRANSFORMADA INVERSA DE LAPLACE .................................................................. 61 1. FRACCIONES PARCIALES.......................................................................................................... 62 1.1. Raíces Reales Simples .............................................................................................................. 62

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1.2. Raíces Complejas Simples ........................................................................................................ 64 1.3. Raíces Múltiples ......................................................................................................................... 68 2. SOLUCIÓN DE ECUACIONES DIFERENCIALES....................................................................... 70 Lección 4: TRANSFORMADA Z .................................................................................................... 73 1. DEFINICIÓN DE LA TRANSFORMADA Z ................................................................................ 73 2. TRANSFORMADA Z DE FUNCIONES ELEMENTALES .......................................................... 74 2.1. Función Delta de Kronecker....................................................................................................... 74 2.2. Función Escalón Unitario ........................................................................................................... 75 2.3. Función Rampa Unitaria............................................................................................................. 75 2.4. Función Polinomial ..................................................................................................................... 76 2.5. Función Exponencial .................................................................................................................. 77 2.6. Función Senoidal........................................................................................................................ 78 3. PROPIEDADES Y TEOREMAS DE LA TRANSFORMADA Z .................................................. 81 3.1. Multiplicación por una Constante ............................................................................................... 81 3.2. Linealidad ................................................................................................................................... 81 3.3. Multiplicación por ka .................................................................................................................. 82 3.4. Traslación Compleja................................................................................................................... 83 3.5. Traslación Real .......................................................................................................................... 83 3.6. Suma de Funciones ................................................................................................................... 84 3.7. Teorema del Valor Inicial............................................................................................................ 85 3.8. Teorema del Valor Final ............................................................................................................. 85 Lección 5: TRANSFORMADA Z INVERSA ................................................................................... 86 1. MÉTODO DE DIVISIÓN DIRECTA............................................................................................... 88 2. MÉTODO DE FRACCIONES PARCIALES................................................................................... 90 3. MÉTODO DE LOS RESIDUOS..................................................................................................... 96 4. SOLUCIÓN DE ECUACIONES EN DIFERENCIA...................................................................... 100 CAPITULO 3: MODELADO DE SISTEMAS DINÁMICOS.............................................................. 102 INTRODUCCIÓN............................................................................................................................. 102 Lección 1: SISTEMAS FÍSICOS Y MODELOS............................................................................... 105 1. SISTEMAS ELÉCTRICOS .......................................................................................................... 105 2. SISTEMAS MECÁNICOS ........................................................................................................... 111 3. SISTEMAS DE NIVEL DE LÍQUIDO........................................................................................... 114 4. SISTEMAS TÉRMICOS .............................................................................................................. 121 Lección 2: FUNCIÓN DE TRANSFERENCIA ................................................................................. 125 1. RESPUESTA IMPULSO ............................................................................................................. 125 2. FUNCIÓN DE TRANSFERENCIA DE SISTEMAS CONTINUOS .............................................. 127 3. FUNCIÓN DE TRANSFERENCIA DE SISTEMAS DISCRETOS............................................... 129 3.1. Muestreo de una Señal ............................................................................................................ 129 3.2. Retención de Datos.................................................................................................................. 131 3.3. Teorema del Muestreo ............................................................................................................. 132 3.4. Función de Transferencia Pulso .............................................................................................. 137 Lección 3: SISTEMAS NO LINEALES ............................................................................................ 140 Lección 4: DIAGRAMAS DE BLOQUES......................................................................................... 144 1. ELEMENTOS DE UN DIAGRAMA DE BLOQUES ..................................................................... 144 2. REDUCCIÓN DE DIAGRAMAS DE BLOQUES PARA SISTEMAS CONTINUOS .................... 146 3. REDUCCIÓN DE DIAGRAMAS DE BLOQUES PARA SISTEMAS DISCRETOS..................... 150 4. REGLA DE MASON .................................................................................................................... 154 Lección 5: ESPACIO DE ESTADOS............................................................................................... 156 1. DEFINICIONES........................................................................................................................... 157 2. ECUACIONES DE ESTADO PARA SISTEMAS CONTINUOS.................................................. 159 3. ECUACIONES DE ESTADO PARA SISTEMAS DISCRETOS .................................................. 166 4. REPRESENTACIÓN EN EL ESPACIO DE ESTADOS .............................................................. 167 ACTIVIDADES DE AUTOEVALUACIÓN DE LA UNIDAD 1........................................................... 173
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
FUENTES DOCUMENTALES DE LA UNIDAD 1 ........................................................................... 174 UNIDAD 2........................................................................................................................................ 175 CAPITULO 4: ANÁLISIS DE LA RESPUESTA EN EL TIEMPO .................................................... 176 INTRODUCCIÓN............................................................................................................................. 176 Lección 1: SISTEMAS DE PRIMER ORDEN.................................................................................. 177 Lección 2: SISTEMAS DE SEGUNDO ORDEN ............................................................................. 181 Lección 3: SISTEMAS DE ORDEN SUPERIOR............................................................................. 189 1. CANCELACIÓN CERO-POLO.................................................................................................... 190 2. APROXIMACIÓN DE POLOS DOMINANTES............................................................................ 191 Lección 4: ERROR EN ESTADO ESTACIONARIO........................................................................ 191 Lección 5: ESTABILIDAD Y CRITERIOS DE ESTABILIDAD......................................................... 196 1. ESTABILIDAD EN SISTEMAS EN TIEMPO CONTINUO .......................................................... 196 2. ESTABILIDAD EN SISTEMAS DE TIEMPO DISCRETO ........................................................... 204 CAPITULO 5: ANÁLISIS DE RESPUESTA EN FRECUENCIA...................................................... 213 INTRODUCCIÓN............................................................................................................................. 213 Lección 1: DIAGRAMAS DE BODE ................................................................................................ 216 Lección 2: ANÁLISIS DE ESTABILIDAD DE BODE....................................................................... 220 1. MARGEN DE FASE .................................................................................................................... 225 2. MARGEN DE GANANCIA........................................................................................................... 226 Lección 3: DIAGRAMA DE NYQUIST............................................................................................. 228 Lección 4: ANÁLISIS DE ESTABILIDAD DE NYQUIST ................................................................. 230 Lección 5: RESPUESTA FRECUENCIAL DE SISTEMAS EN TIEMPO DISCRETO..................... 244 CAPITULO 6: ANÁLISIS DEL LGR Y DEL ESPACIO DE ESTADOS............................................ 252 INTRODUCCIÓN............................................................................................................................. 252 Lección 1: REGLAS DE CONSTRUCCIÓN DEL LUGAR DE LAS RAÍCES.................................. 253 Lección 2: ASPECTOS IMPORTANTES EN LA CONSTRUCCIÓN DEL LGR.............................. 270 1. EFECTOS DE ADICIÓN DE POLOS Y CEROS......................................................................... 270 2. EFECTOS DE MOVIMIENTOS DE POLOS Y CEROS.............................................................. 272 3. LGR EN SISTEMAS DISCRETOS.............................................................................................. 273 Lección 3: REPRESENTACIONES EN EL ESPACIO DE ESTADOS............................................ 275 1. FORMA CANÓNICA CONTROLABLE ....................................................................................... 276 2. FORMA CANÓNICA OBSERVABLE .......................................................................................... 277 3. FORMA CANÓNICA DIAGONAL................................................................................................ 277 4. FORMA CANÓNICA DE JORDAN ............................................................................................. 278 Lección 4: SOLUCIÓN DE LA ECUACIÓN DE ESTADOS ............................................................ 281 1. SOLUCIÓN DE LAS ECUACIONES DE ESTADO PARA EL CASO HOMOGÉNEO................ 281 2. SOLUCIÓN DE LAS ECUACIONES DE ESTADO PARA EL CASO NO HOMOGÉNEO.......... 284 Lección 5: CONTROLABILIDAD Y OBSERVABILIDAD................................................................. 286 1. CONTROLABILIDAD .................................................................................................................. 286 2. OBSERVABILIDAD ..................................................................................................................... 287

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
LISTADO DE TABLAS Table 2.1 Pares de transformadas de Laplace ................................................................................. 50 Table 2.2 Propiedades de la transformada de Laplace .................................................................... 60 Table 2.3 Pares de transformadas Z ............................................................................................. 79 Table 2.4 Propiedades de la transformada Z ................................................................................. 86 Table 2.5 Transformadas Z de ( )x k n+ y ( )x k n− .................................................................. 100 Table 3.1 Reglas del álgebra de bloques........................................................................................ 147 Table 3.2 Sistemas de control discreto en lazo cerrado ................................................................. 153 Table 4.1 Error en estado estacionario para diversos sistemas ..................................................... 195 Table 4.2 Arreglo de Jury ................................................................................................................ 209

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
LISTADO DE GRÁFICOS Y FIGURAS Figure 1.1 Diagrama general de un proceso..................................................................................... 17 Figure 1.2 Sistema de control automático......................................................................................... 18 Figure 1.3 Sistema de control de nivel.............................................................................................. 21 Figure 1.4 Intercambiador de calor ................................................................................................... 22 Figure 1.5 Diagrama de bloques del intercambiador de calor .......................................................... 22 Figure 1.6 Sistema de control continuo............................................................................................. 25 Figure 1.7 Sistema de control discreto.............................................................................................. 26 Figure 1.8 Sistema de control de dirección de un auto..................................................................... 27 Figure 1.9 Sistema de control de velocidad de un auto.................................................................... 27 Figure 1.10 Sistema de control de temperatura de un horno eléctrico............................................. 28 Figure 1.11 Sistema de control en lazo cerrado ............................................................................... 29 Figure 1.12 Sistema de control en lazo abierto................................................................................. 30 Figure 1.13 Sistema realimentado .................................................................................................... 31 Figure 2.1 Señales en tiempo continuo y en tiempo discreto ........................................................... 39 Figure 2.2 Plano complejo s ............................................................................................................ 40 Figure 2.3 Aproximación a la función impulso .................................................................................. 45 Figure 2.4 Función impulso ............................................................................................................... 46 Figure 2.5 Función escalón ............................................................................................................... 46 Figure 2.6 Función rampa ................................................................................................................. 47 Figure 2.7 Función exponencial ........................................................................................................ 48 Figure 2.8 Función senoidal .............................................................................................................. 49 Figure 2.9 Función delta de Kronecker ............................................................................................. 74 Figure 2.10 Función escalón unitario ................................................................................................ 75 Figure 2.11 Función rampa unitaria .................................................................................................. 76 Figure 2.12 Función polinomial ......................................................................................................... 76 Figure 2.13 Función exponencial ...................................................................................................... 77 Figure 2.14 Función senoidal ............................................................................................................ 78 Figure 2.15 Funciones en tiempo continuo con los mismos valores en 0, , 2 ,...t T T= .................. 87 Figure 3.1 No linealidad de saturación............................................................................................ 104 Figure 3.2 No linealidad de zona muerta ........................................................................................ 104 Figure 3.3 No linealidad de ley cuadrática ...................................................................................... 104 Figure 3.4 Circuito RL en serie........................................................................................................ 105 Figure 3.5 Circuito RC en serie ....................................................................................................... 106 Figure 3.6 Circuito RC en paralelo.................................................................................................. 107 Figure 3.7 Circuito RLC en serie ..................................................................................................... 108 Figure 3.8 Circuito RC..................................................................................................................... 109 Figure 3.9 Sistema masa-amortiguador.......................................................................................... 112 Figure 3.10 Diagrama de cuerpo libre para el sistema masa-amortiguador................................... 112 Figure 3.11 Sistema masa-resorte-amortiguador ........................................................................... 113 Figure 3.12 Diagrama de cuerpo libre para el sistema masa-resorte-amortiguador ...................... 113 Figure 3.13 Sistema de nivel de líquido .......................................................................................... 115 Figure 3.14 Sistema de nivel de líquido .......................................................................................... 117 Figure 3.15 Sistema de nivel de líquido con interacción................................................................. 119 Figure 3.16 Sistema térmico ........................................................................................................... 123 Figure 3.17 Muestreo mediante impulsos ....................................................................................... 130

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 3.18 Reconstrucción efectuada por el ZOH......................................................................... 131 Figure 3.19 Muestreo y reconstrucción de una señal ..................................................................... 133 Figure 3.20 Espectro de la señal ( )f t ........................................................................................... 133 Figure 3.21 Repetición del espectro de la señal debido al muestreo ............................................. 134 Figure 3.22 Superposición de espectros (aliasing) ......................................................................... 134 Figure 3.23 Distorsión del espectro de la señal al recuperar con el ZOH ...................................... 135 Figure 3.24 Muestreo y reconstrucción ideal .................................................................................. 136 Figure 3.25 Muestreo ideal y reconstrucción mediante ZOH.......................................................... 136 Figure 3.26 Muestreo real (ancho de pulso p ) y reconstrucción mediante ZOH .......................... 137 Figure 3.27 Sistema continuo excitado por una entrada continua.................................................. 138 Figure 3.28 Sistema continuo excitado por una entrada discreta................................................... 138 Figure 3.29 Respuesta de un sistema continuo a una entrada discreta......................................... 138 Figure 3.30 Intercambiador de calor ............................................................................................... 142 Figure 3.31 Elementos de un diagrama de bloques ....................................................................... 144 Figure 3.32 Circuito RC................................................................................................................... 145 Figure 3.33 Diagrama de bloques para el ejemplo 3.18 ................................................................. 147 Figure 3.34 Sistema muestreado mediante impulsos..................................................................... 150 Figure 3.35 Sistema muestreado con un muestreador entre los elementos en serie .................... 151 Figure 3.36 Sistema muestreado sin muestreador entre los elementos en serie........................... 152 Figure 3.37 Diagrama de bloques para el ejemplo 3.21 ................................................................. 154 Figure 3.38 Circuito RLC................................................................................................................. 157 Figure 3.39 Sistema LTI en espacio de estados............................................................................. 162 Figure 3.40 Sistema mecánico........................................................................................................ 162 Figure 4.1 Sistema de primer orden. :T Constante de tiempo del sistema ................................... 177 Figure 4.2 Respuesta escalón de un sistema de primer orden ...................................................... 178 Figure 4.3 Respuesta rampa de un sistema de primer orden......................................................... 179 Figure 4.4 Respuesta impulso de un sistema de primer orden ...................................................... 180 Figure 4.5 Ubicación de los polos en función de ζ ....................................................................... 182 Figure 4.6 Diferentes respuestas escalón de un sistema de segundo orden................................. 183 Figure 4.7 Especificaciones para un sistema con respuesta subamortiguada............................... 184 Figure 4.8 pM en función de ζ .................................................................................................... 186 Figure 4.9 Curvas envolventes de la respuesta paso..................................................................... 187 Figure 4.10 Respuestas al escalón de sistemas de segundo orden .............................................. 188 Figure 4.11 Funciones continuas según la ubicación de sus polos en el plano s ......................... 196 Figure 4.12 Estructura de un sistema de control en lazo cerrado .................................................. 197 Figure 4.13 Diagrama de bloques de un sistema de lazo cerrado ................................................. 203 Figure 4.14 Funciones discretas según la ubicación de sus polos en el plano z ......................... 205 Figure 4.15 Diagrama de bloques de un sistema de control discreto en lazo cerrado................... 205 Figure 4.16 Relación entre los planos ,s z y w ............................................................................. 206 Figure 4.17 Diagrama de bloques para el ejemplo 4.8 ................................................................... 207 Figure 5.1 Sistema de tiempo continuo........................................................................................... 214 Figure 5.2 Diagramas de Bode aproximados para sistemas de primer orden ............................... 217 Figure 5.3 Diagramas de Bode aproximados para sistemas de segundo orden............................ 218 Figure 5.4 Diagrama de Bode de magnitud para un sistema de segundo orden con distintos valores de ζ ............................................................................................................................................... 219 Figure 5.5 Diagrama de Bode de fase para un sistema de segundo orden con distintos valores de ζ .................................................................................................................................................... 219 Figure 5.6 Relación entre el LGR y los diagramas de Bode........................................................... 221 Figure 5.7 Sistema del ejemplo 5.1................................................................................................. 222 Figure 5.8 Diagrama de Bode para el ejemplo 5.1 ......................................................................... 222

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.9 Medición del MF y del MG en el diagrama de Bode para 600K = ............................. 227 Figure 5.10 Medición del MF y del MG en el diagrama de Bode para 15K = ............................. 227 Figure 5.11 Diagrama polar............................................................................................................. 228 Figure 5.12 Diagrama polar de un sistema de tercer orden ........................................................... 229 Figure 5.13 Diagrama polar de un sistema de segundo orden....................................................... 230 Figure 5.14 Teorema de la transformación conforme..................................................................... 231 Figure 5.15 Teorema de la representación ..................................................................................... 232 Figure 5.16 Recorrido de Nyquist.................................................................................................... 233 Figure 5.17 Diagrama de Nyquist a) en el plano 1 ( ) ( )G j H jω ω+ b) en el plano ( ) ( )G j H jω ω......................................................................................................................................................... 234 Figure 5.18 Recorrido de Nyquist modificado ................................................................................. 236 Figure 5.19 Sistema realimentado para el ejemplo 5.2 .................................................................. 236 Figure 5.20 Recorrido de Nyquist modificado para el ejemplo 5.2 ................................................. 237 Figure 5.21 LGR para el sistema del ejemplo 5.2........................................................................... 238 Figure 5.22 Diagrama de Nyquist para 1K = (línea continua) y simétrico (línea discontinua)..... 240 Figure 5.23 Diagrama polar que contiene al punto 1 0j− + .......................................................... 241 Figure 5.24 LGR del sistema de ejemplo........................................................................................ 242 Figure 5.25 Diagrama de Nyquist para 10,60 y 200K = ............................................................ 242 Figure 5.26 Medición del MF y del MG en el diagrama polar para 30K = ................................... 243 Figure 5.27 Medición del MF y del MG en el diagrama polar para 100K = ................................. 244 Figure 5.28 Sistema de tiempo discreto.......................................................................................... 244 Figure 5.29 Sistema discreto en lazo abierto.................................................................................. 248 Figure 5.30 Sistema discreto en lazo cerrado................................................................................. 249 Figure 6.1 Polos y ceros en lazo abierto......................................................................................... 254 Figure 6.2 LGR sobre el eje real ..................................................................................................... 254 Figure 6.3 Inicio y final del LGR ...................................................................................................... 256 Figure 6.4 Asíntotas del LGR.......................................................................................................... 256 Figure 6.5 Ubicación de las asíntotas ............................................................................................. 257 Figure 6.6 Puntos de ruptura........................................................................................................... 258 Figure 6.7 LGR sobre eje real entre dos polos ............................................................................... 259 Figure 6.8 LGR sobre eje real entre dos ceros ............................................................................... 259 Figure 6.9 LGR sobre eje real entre cero y polo ............................................................................. 260 Figure 6.10 Puntos de cruce del LGR con el eje imaginario........................................................... 260 Figure 6.11 Ángulos de arranque y llegada .................................................................................... 262 Figure 6.12 Polos y ceros del ejemplo 6.1 ...................................................................................... 263 Figure 6.13 LGR del ejemplo 6.1 .................................................................................................... 266 Figure 6.14 Polos y ceros del ejemplo 6.2 ...................................................................................... 267 Figure 6.15 LGR del ejemplo 6.2 .................................................................................................... 269 Figure 6.16 Evaluación de los ceros en lazo cerrado ..................................................................... 269 Figure 6.17 Efecto de la adición de polos sobre el LRG................................................................. 271 Figure 6.18 Efecto de la adición de un cero sobre el LGR ............................................................. 272 Figure 6.19 Efecto del movimiento de un polo hacia el semiplano derecho................................... 272 Figure 6.20 Sistema del ejemplo 6.3............................................................................................... 273 Figure 6.21 LGR del ejemplo 6.3 .................................................................................................... 274 Figure 6.22 LGR del ejemplo 6.4 .................................................................................................... 275

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
UNIDAD 1
Nombre de la Unidad Representación de los Sistemas Dinámicos
Introducción
La Unidad 1 trata en primer lugar, los aspectos introductorios y la terminología referente al área de control; en segundo lugar, introduce y refuerza el manejo matemático necesario para el modelado de los sistemas dinámicos, como lo es la transformada de Laplace y la transformada Z; y en tercer lugar trata las diferentes representaciones que se pueden utilizar para analizar los sistemas dinámicos.
Justificación
El estudiante de tecnología e ingeniería electrónica debe conocer la importancia que tiene la representación de los sistemas dinámicos dentro de la ingeniería, ya que esto le permitirá enfrentar un sistema real y obtener las bases para diseñar una solución que mejore su desempeño. En la Unidad 1 se presentan las herramientas analíticas que le permiten modelar plantas y sistemas de control lineales e invariantes en el tiempo tanto continuo como discreto. Mediante el desarrollo de las lecciones propuestas se pretende concientizar a los estudiantes del propósito que tienen los sistemas de control desde el punto de vista de la representación del sistema, la ubicación del modelamiento de sistemas dinámicos como profesión y como tarea dentro del ciclo de vida de los sistemas industriales.
Intencionalidades Formativas
Lograr que el estudiante comprenda la manera de representar y modelar sistemas dinámicos lineales e invariantes en el tiempo, empleando para ello algunas herramientas matemáticas que le permitan aplicar apropiadamente estos conocimientos en el campo tecnológico.
Denominación de Capítulos
• Capítulo 1: Sistemas de control • Capítulo 2: Herramientas matemáticas • Capítulo 3: Modelado de sistemas dinámicos

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1. CAPITULO 1: SISTEMAS DE CONTROL INTRODUCCIÓN En muchos procesos industriales (sistemas dinámicos) la función de control es realizada por un operario (ser humano), este operario es el que decide cuándo y cómo manipular las variables de tal modo que se obtenga una cadena productiva continua y eficiente. La eficiencia productiva implica el constante aumento de los niveles de producción de la maquinaria instalada, el mejoramiento de la calidad del producto final, la disminución de los costos de producción, y la seguridad tanto para el personal como para los equipos. Para lograr esto es necesario que los procesos productivos se realicen a la mayor velocidad posible y que las variables a controlar estén dentro de valores constantes. Debido a estas exigencias, la industria ha necesitado de la utilización de nuevos y más complejos procesos, que muchas veces el operario no puede controlar debido a la velocidad y exactitud requerida, además muchas veces las condiciones del espacio donde se lleva a cabo la tarea no son las más adecuadas para el desempeño del ser humano. Frente a este panorama, surgen los sistemas de control como una solución que permite llevar la producción a estándares de calidad mucho mejores. Actualmente en el mundo, se ve una introducción de los computadores y de la microelectrónica en la industria y en la sociedad, esto trae consigo una extensión del campo de los sistemas de control industrial ya que permite, a través del manejo de la información (señales, datos, mediciones, etc.), transformar los mecanismos de producción y procesos productivos de algunas industrias. El principal objetivo de este capitulo es presentar las definiciones acerca de los diferentes elementos que componen un sistema de control y los tipos de sistemas de control existentes tanto en tiempo continuo como discreto. También se realiza una introducción a los diferentes métodos de control aplicados actualmente en la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
industria con el fin de que el estudiante tenga una visión general de los alcances de la teoría de control. Antes de iniciar con este estudio hay que aclarar algunos conceptos que serán manejados a lo largo de este texto: • Control: Acción ejercida con el fin de poder mantener una variable dentro de
un rango de valores predeterminados. • Sistema de Control: Conjunto de equipos y componentes, que van a permitir
llevar a cabo las operaciones de control. • Operaciones de Control: Conjunto de acciones que buscan mantener una
variable dentro de patrones de funcionamiento deseados. • Control Automático: Es el desarrollo de la acción de control, sin la
participación directa de un ser humano (operario). Lección 1: ELEMENTOS DE UN SISTEMA DE CONTROL 1. ELEMENTOS DE CONTROL Dependiendo del tipo de proceso y la función de control requerida, los sistemas de control van desde los más simples como mantener el nivel de agua o de temperatura en un tanque, hasta los más complicados en los cuales se hace uso de equipos sofisticados y de un conjunto de algoritmos de control óptimo, control robusto, inteligencia artificial, etc. Se realiza el control de un proceso, cuando es posible regular el valor de la variable de salida, variando el valor de la señal de control o señal de entrada.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 1.1 Diagrama general de un proceso
• Planta: Es el ambiente donde se encuentran los equipos y donde se lleva a
cabo el proceso. Se puede decir que es el conjunto de objetos físicos, en los cuales es necesario desarrollar acciones especialmente organizadas con el fin de lograr los resultados de funcionamiento y desempeño deseados; estos objetos van a ser controlados por medio de acciones.
• Señales de Control: Son aquellas acciones elaboradas por el sistema de
control, o dadas por un operario, a través de las variables manipuladas. Por ejemplo, si se desea mantener un tanque a una temperatura constante, se deberá manipular el nivel de voltaje que recibe la resistencia que brinda calor al tanque.
• Perturbaciones: Son aquellas acciones que no dependen del sistema de
control ni del operario, pero intervienen positiva o negativamente en el proceso. Por ejemplo, para el caso anterior si se desea mantener una temperatura constante en un tanque, la temperatura ambiental actuará e interferirá con el calor del tanque.
• Variables de Salida: Son aquellas que caracterizan el estado de los procesos
dentro de la planta, estas variables son guiadas por variables controladas. Por ejemplo, si se cuenta con un recipiente de agua en el cual la variable de salida será el nivel, entonces la variable controlada será el flujo de líquido que ingresa al recipiente.
• Proceso Industrial (Sistema Dinámico): Es la sucesión de cambios
graduales (en el tiempo) de materia y energía, todo proceso implica una transformación; generalizando se puede decir que es todo fenómeno físico que se puede medir y controlar. Pueden ser procesos continuos (siderúrgica, petroquímica), procesos de manufactura (embotelladoras, confección de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
textiles), procesos de servicio (distribución de agua), y procesos híbridos (reciclaje de vidrio).
2. ELEMENTOS DE UN SISTEMA DE CONTROL AUTOMÁTICO Adicionalmente a los componentes anteriores, se encuentran aquellos que le van a dar la particularidad de ser automático, es decir, el sistema de control va a actuar independiente del operario y va a determinar por sí mismo los mejores valores para las señales de control. Para ello se contará con una referencia, que es un valor dado por el operario, este valor es fijo y depende del tipo de proceso y de las exigencias que este amerite; es conocido como set-point, este valor es el que se desea alcanzar y mantener.
Figure 1.2 Sistema de control automático
Así, se tienen cuatro elementos que conforman el sistema de control: • Controlador: Es aquel instrumento que compara el valor medido con el valor
deseado, en base a esta comparación calcula un error (diferencia entre valor medido y deseado), para luego actuar a fin de corregir este error. Tiene por objetivo elaborar la señal de control que permita que la variable controlada o variable de salida corresponda a la señal de referencia. Los controladores pueden ser de tipo manual, neumático o electrónico.
Los controladores electrónicos más usados son: computadores con tarjetas de adquisición de datos, PLC (Controladores Lógicos Programables) y microcontroladores (PIC).

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
El tipo de controlador más común es el PLC, el cual es un equipo electrónico basado en microprocesadores. El PLC hace uso de memorias programables y regrabables (RAM), en donde se almacenan instrucciones a manera de algoritmos que van a permitir seguir una lógica de control. Contiene interfaces que le permiten manejar gran número de entradas y salidas tanto analógicas como digitales. • Actuador: Es aquel equipo que sirve para regular la variable de control y
ejecutar la acción de control, también es conocido como elemento final de control. Los actuadores pueden ser de tres tipos:
Actuadores eléctricos: Son usados para posicionar dispositivos de movimientos lineales o rotacionales. Por ejemplo: motores, relés, switches y electroválvulas.
Actuadores neumáticos: Trabajan con señales de presión, estas
señales son convertidas a movimientos mecánicos. Por ejemplo: pistones neumáticos y válvulas.
Actuadores hidráulicos: Operan igual a los neumáticos, son usados en
tareas que requieren mayor fuerza por ejemplo levantar compuertas, mover grúas, elevadores, etc. Por ejemplo: pistones hidráulicos.
• Proceso: Esta referido al equipo que va a ser automatizado, por ejemplo
puede ser una bomba, una tolva, un tanque, un compresor, un molino, un intercambiador de calor, un horno, un secador, una caldera, etc.
• Sensor: Es un elemento de medición de parámetros o variables del proceso.
Los sensores pueden ser usados también como indicadores, para transformar la señal medida en señal eléctrica. Los sensores más comunes son los de nivel, temperatura, presencia, proximidad, flujo, presión, entre otros. Pueden ser de varios tipos:
Sensores de contacto: Son aquellos que realizan la medida en contacto directo, real y físico con el producto o materia. Por ejemplo: sensores de boya para medir nivel en un tanque, termocuplas para medir temperatura, etc.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Sensores de no contacto: Se basan en propiedades físicas de los
materiales, son más exactos, pero son propensos a interferencias del medio ambiente. Por ejemplo: sensores ultrasónicos, sensores ópticos, etc.
Sensores digitales: Trabajan con señales digitales, en código binario,
pueden representar la codificación de una señal analógica, o también la representación de dos estados ON/OFF. Por ejemplo: sensores tipo switch.
Sensores analógicos: Proporcionan medidas continuas, los rangos
típicos son de 4 a 20 mA, 0 a 5 V, entre otros. Por ejemplo: sensores capacitivos, sensores piezoresistivos, etc.
Sensores mecánicos: Son aquellos que traducen la acción física del
elemento medido, en un comportamiento mecánico, típicamente de movimiento y/o calor. Por ejemplo: barómetros, termómetros de mercurio, etc.
Sensores electro-mecánicos: Este tipo de sensor emplea un elemento
mecánico elástico combinado con un transductor eléctrico. Por ejemplo: sensores resistivos, sensores magnéticos, etc.
A continuación, se muestra un ejemplo de un sistema de control de nivel, donde el proceso esta constituido por un tanque abierto, el controlador es de tipo electrónico, y a través de un transductor se convierte la señal eléctrica a neumática, esta señal de presión de aire acciona una válvula neumática que cumple la función de actuador, finalmente se cuenta con un sensor de nivel de tipo no contacto.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 1.3 Sistema de control de nivel
3. TIPOS DE VARIABLES Se define como variable a todo aquel parámetro físico cuyo valor puede ser medido. Puede ser: • Variable Controlada: Es aquella que se busca mantener constante o con
cambios mínimos. Su valor debe seguir al set-point. • Variable Manipulada: A través de esta se debe corregir el efecto de las
perturbaciones. Sobre esta se colocará el actuador. • Variable Perturbadora: Esta dado por los cambios repentinos que sufre el
sistema y que provocan inestabilidad. • Variable Medida: Es toda variable adicional, cuyo valor es necesario registrar
y monitorear, pero que no es necesario controlar.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
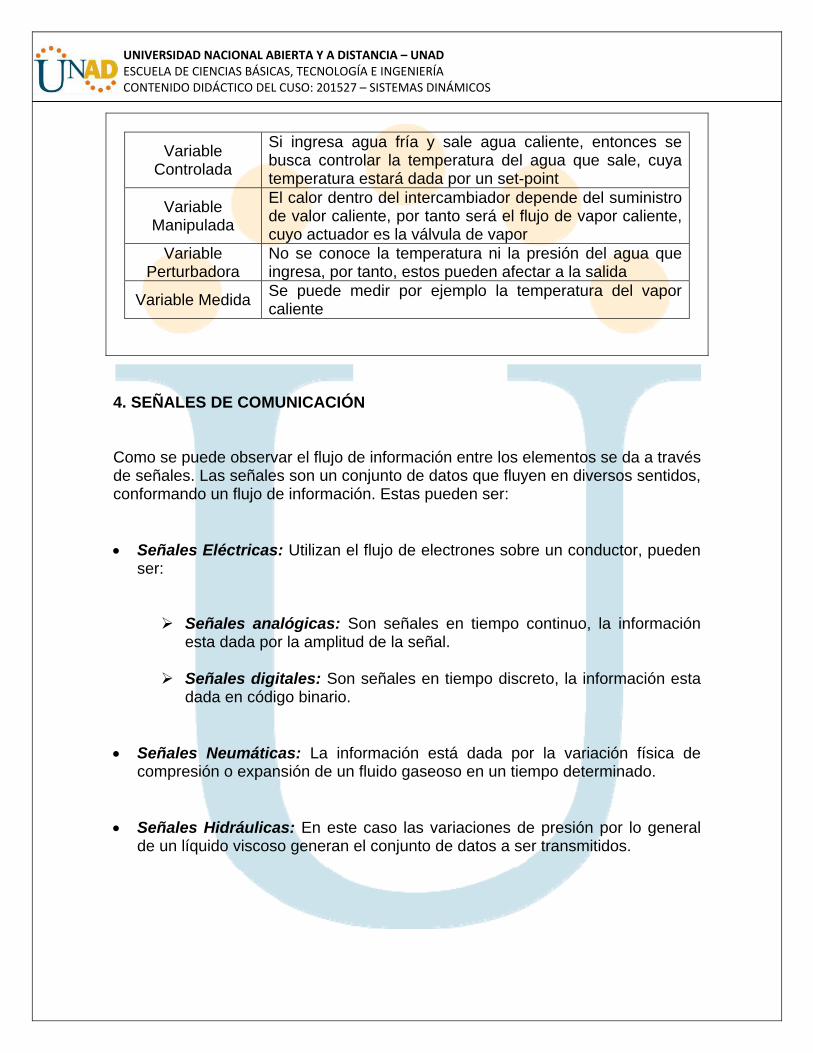
Ejemplo 1.1 La figura 1.4 muestra un intercambiador de calor. A continuación, se presenta un diagrama y un cuadro donde se describen las distintas variables que intervienen en el proceso.
Figure 1.4 Intercambiador de calor
Solución:
Figure 1.5 Diagrama de bloques del intercambiador de calor
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Variable Controlada
Si ingresa agua fría y sale agua caliente, entonces se busca controlar la temperatura del agua que sale, cuya temperatura estará dada por un set-point
Variable Manipulada
El calor dentro del intercambiador depende del suministro de valor caliente, por tanto será el flujo de vapor caliente, cuyo actuador es la válvula de vapor
Variable Perturbadora
No se conoce la temperatura ni la presión del agua que ingresa, por tanto, estos pueden afectar a la salida
Variable Medida Se puede medir por ejemplo la temperatura del vapor caliente
4. SEÑALES DE COMUNICACIÓN Como se puede observar el flujo de información entre los elementos se da a través de señales. Las señales son un conjunto de datos que fluyen en diversos sentidos, conformando un flujo de información. Estas pueden ser: • Señales Eléctricas: Utilizan el flujo de electrones sobre un conductor, pueden
ser:
Señales analógicas: Son señales en tiempo continuo, la información esta dada por la amplitud de la señal.
Señales digitales: Son señales en tiempo discreto, la información esta
dada en código binario. • Señales Neumáticas: La información está dada por la variación física de
compresión o expansión de un fluido gaseoso en un tiempo determinado. • Señales Hidráulicas: En este caso las variaciones de presión por lo general
de un líquido viscoso generan el conjunto de datos a ser transmitidos.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Señales de Sonido: Conformadas por ondas de sonido producidas por el movimiento vibratorio de los cuerpos a una determinada frecuencia; también son usadas las ondas ultrasónicas.
• Señales Electromagnéticas: La información viaja sobre una onda de radio,
microondas o satélite, empaquetada dentro de una señal portadora, recorriendo grandes distancias.
• Señales Ópticas: Se hace uso de la fibra óptica y son empleadas para
transmitir grandes volúmenes de información, generalmente usadas en redes de controladores.
Lección 2: SISTEMAS CONTINUOS Y DISCRETOS 1. SISTEMAS DE CONTROL CONTINUOS Los sistemas de control continuos son aquellos que están descritos mediante ecuaciones diferenciales que describen las leyes físicas que rigen el comportamiento de dicho sistema, y que relacionan el comportamiento de la salida de este ante una entrada determinada. Estos sistemas se caracterizan porque las variables poseen un valor para cualquier tiempo posible dentro de un intervalo de tiempo finito. Está referido a las señales analógicas, y su comportamiento matemático es similar a una onda continua. Por ejemplo un proceso de llenado de balones de gas. Recordando que un sistema de control, generalmente estará formado por diversos sistemas (planta, control, etc.). La topología típica de un sistema de control continuo es:
co01802286
Resaltado
co01802286
Resaltado
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
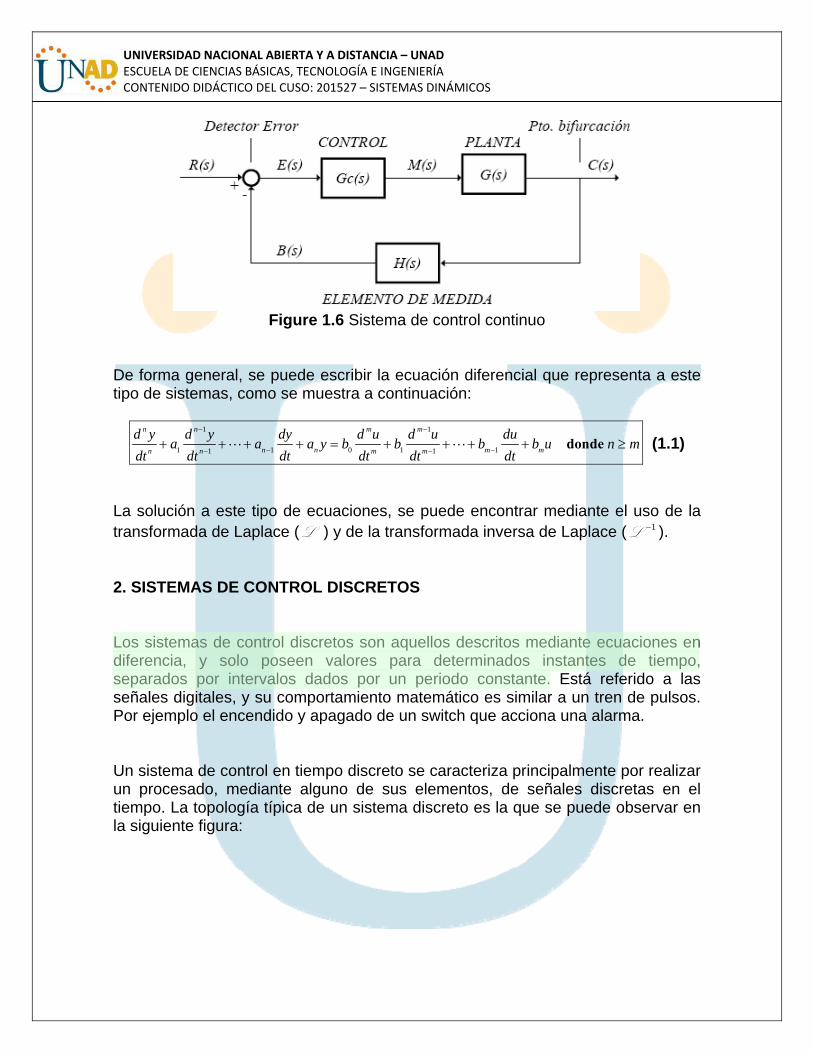
Figure 1.6 Sistema de control continuo
De forma general, se puede escribir la ecuación diferencial que representa a este tipo de sistemas, como se muestra a continuación:
1 1
1 1 0 1 11 1
n n m m
n n m mn n m m
d y d y dy d u d u dua a a y b b b b u n m
dt dt dt dt dt dt
− −
− −− −+ + + + = + + + + ≥donde (1.1)
La solución a este tipo de ecuaciones, se puede encontrar mediante el uso de la transformada de Laplace (L ) y de la transformada inversa de Laplace ( 1−L ). 2. SISTEMAS DE CONTROL DISCRETOS Los sistemas de control discretos son aquellos descritos mediante ecuaciones en diferencia, y solo poseen valores para determinados instantes de tiempo, separados por intervalos dados por un periodo constante. Está referido a las señales digitales, y su comportamiento matemático es similar a un tren de pulsos. Por ejemplo el encendido y apagado de un switch que acciona una alarma. Un sistema de control en tiempo discreto se caracteriza principalmente por realizar un procesado, mediante alguno de sus elementos, de señales discretas en el tiempo. La topología típica de un sistema discreto es la que se puede observar en la siguiente figura:
co01802286
Resaltado

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 1.7 Sistema de control discreto
Respecto a los sistemas control en tiempo continuo se observa la inclusión de algunos elementos nuevos: • Control digital o discreto: Es un sistema procesador diseñado para que el
sistema de control logre las especificaciones requeridas. Este sistema trabaja u opera en instantes de tiempo predeterminados, múltiplos del periodo de muestreo y es, por tanto, un sistema síncrono. La operatividad del sistema o su funcionamiento de procesado queda caracterizada plenamente mediante su ecuación en diferencias:
1 0 1( ) ( 1) ( ) ( ) ( 1) ( )n n m my k n a y k a y k b u k m b u k b u k n m− −+ + + + + = + + + + + ≥donde (1.2)
Este tipo de ecuaciones se pueden solucionar empleando la transformada Z y la transformada Z inversa ( 1−Z ). • Interfaces A/D y D/A: Se usan para convertir señales continuas en señales
discretas y señales discretas en señales continuas, respectivamente. Permiten la introducción de un procesador discreto en el sistema de control y reconstruyen temporalmente la señal discreta en una señal continua en el tiempo.
Debe observarse que el periodo de muestreo T depende fundamentalmente del tiempo de ciclo del programa que ejecuta el algoritmo de control; así, normalmente el tiempo de ciclo de programa suele ser mayor que el periodo de muestreo de los conversores A/D. En algunos casos, el periodo de muestreo se diseña para que sea mayor que el tiempo de ciclo (cuando las constantes de tiempo del proceso o planta son muy grandes), utilizándose el resto de tiempo del procesador para

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
realizar funciones de transmisión y representación de datos o, simplemente, funciones de gestión de posibles alarmas. Algunas ventajas del muestreo en sistemas de control son: • Mayor facilidad de realización. • No existen errores (ruido, interferencias, etc.). • Son más compactos, menos pesados. • Menor costo. • Flexibilidad de programación. 3. EJEMPLOS DE SISTEMAS DE CONTROL Un ejemplo sencillo de un sistema de control continuo, es el sistema de control de dirección de un automóvil. La dirección de las ruedas delanteras se puede considerar la variable controlada o salida ( )y t , y la dirección el volante es la señal actuante o entrada ( )u t . El proceso en este caso está compuesto por el mecanismo de la dirección y de la dinámica del automóvil completo.
Figure 1.8 Sistema de control de dirección de un auto
Por otro lado, si el objetivo es controlar la velocidad del automóvil, entonces la presión ejercida sobre el acelerador sería la señal de entrada y la velocidad del automóvil sería la señal de salida.
Figure 1.9 Sistema de control de velocidad de un auto
PLANTA
Dirección de las ruedas delanteras
( )y t
Dirección del volante
( )u t
PLANTA
Velocidad del auto
( )y t
Presión sobre acelerador
( )u t

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En ambos casos se trata de un sistema de control continuo, ya que las señales que se procesan en la planta varían continuamente en el tiempo. Otro ejemplo se muestra a continuación, donde se aprecia el diagrama esquemático del control de temperatura de un horno eléctrico.
Figure 1.10 Sistema de control de temperatura de un horno eléctrico
La temperatura del horno eléctrico se mide mediante un termómetro, que es un dispositivo analógico. La temperatura analógica se convierte a una temperatura digital mediante un convertidor A/D. La temperatura digital se introduce a un controlador, que en este caso es un computador, mediante una interfase. Esta temperatura digital se compara con una temperatura que se ingresa mediante un programa y si hay una discrepancia (error) el controlador envía una señal al calefactor, a través de una interfase, un amplificador y un relevador, para hacer que la temperatura del horno adquiera el valor deseado. En este último ejemplo se observa que se trata de un sistema de control discreto, ya que las señales que se procesan no son continuas en el tiempo, sino que son muestreadas a intervalos regulares de tiempo mediante la acción del convertidor A/D. Lección 3: TIPOS DE SISTEMAS DE CONTROL En base a su principio de funcionamiento los sistemas de control pueden emplear o no, información a cerca de la planta, a fin de elaborar o no, estrategias de supervisión y control. Se cuenta con dos tipos de sistemas de control: en lazo abierto y en lazo cerrado.
Convertidor A/D Interfase
Relevador Amplificador Interfase
ComputadorEntrada
programada
Horno
eléctrico
Calefactor
Termómetro
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
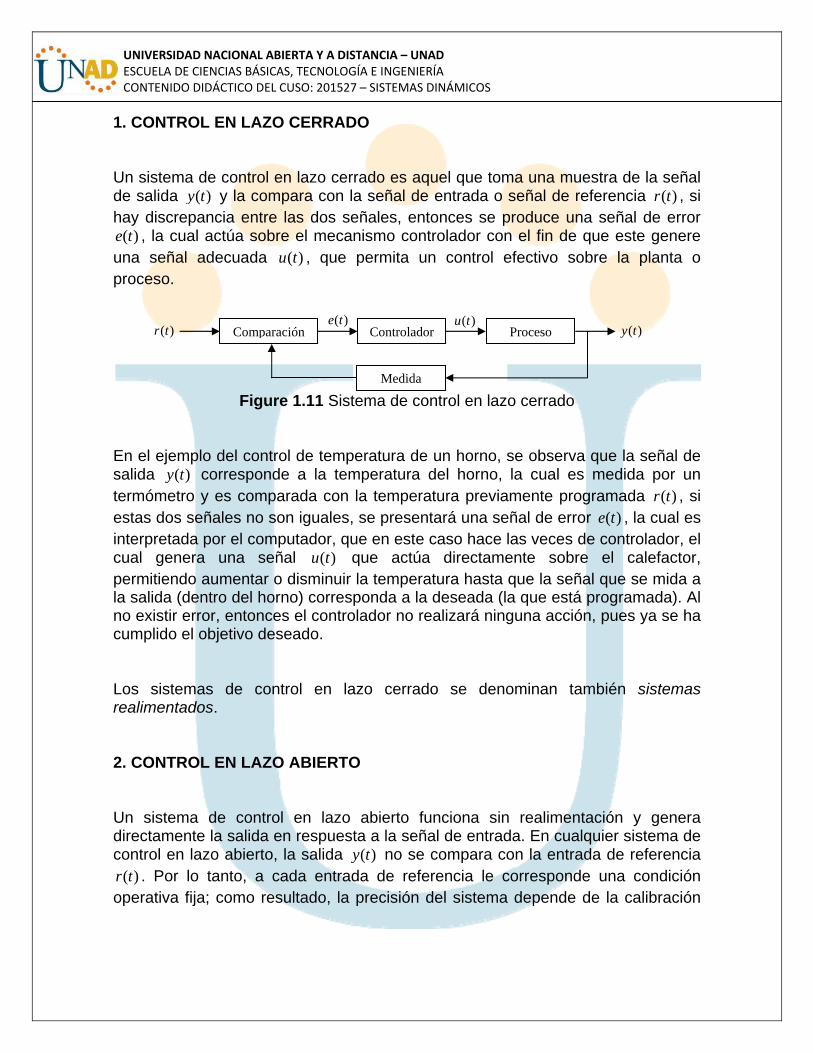
1. CONTROL EN LAZO CERRADO Un sistema de control en lazo cerrado es aquel que toma una muestra de la señal de salida ( )y t y la compara con la señal de entrada o señal de referencia ( )r t , si hay discrepancia entre las dos señales, entonces se produce una señal de error
( )e t , la cual actúa sobre el mecanismo controlador con el fin de que este genere una señal adecuada ( )u t , que permita un control efectivo sobre la planta o proceso.
Figure 1.11 Sistema de control en lazo cerrado
En el ejemplo del control de temperatura de un horno, se observa que la señal de salida ( )y t corresponde a la temperatura del horno, la cual es medida por un termómetro y es comparada con la temperatura previamente programada ( )r t , si estas dos señales no son iguales, se presentará una señal de error ( )e t , la cual es interpretada por el computador, que en este caso hace las veces de controlador, el cual genera una señal ( )u t que actúa directamente sobre el calefactor, permitiendo aumentar o disminuir la temperatura hasta que la señal que se mida a la salida (dentro del horno) corresponda a la deseada (la que está programada). Al no existir error, entonces el controlador no realizará ninguna acción, pues ya se ha cumplido el objetivo deseado. Los sistemas de control en lazo cerrado se denominan también sistemas realimentados. 2. CONTROL EN LAZO ABIERTO Un sistema de control en lazo abierto funciona sin realimentación y genera directamente la salida en respuesta a la señal de entrada. En cualquier sistema de control en lazo abierto, la salida ( )y t no se compara con la entrada de referencia
( )r t . Por lo tanto, a cada entrada de referencia le corresponde una condición operativa fija; como resultado, la precisión del sistema depende de la calibración
Comparación Controlador Proceso
Medida
( )r t ( )e t ( )u t
( )y t

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
que se le haya dado. Ante la presencia de perturbaciones, un sistema de control en lazo abierto no realiza la tarea deseada.
Figure 1.12 Sistema de control en lazo abierto
En la práctica, el control en lazo abierto sólo se usa si se conoce la relación entre la entrada y la salida y si no hay perturbaciones internas ni externas. Es evidente que estos sistemas no son de control realimentado. Observe que cualquier sistema de control que opere con una base de tiempo es en lazo abierto. Por ejemplo, el control del tránsito mediante señales operadas con una base de tiempo, o el control de la temperatura en una tostadora. Lección 4: EFECTOS DE LA REALIMENTACIÓN En la lección anterior, se ha visto que la realimentación es usada para reducir el error entre la entrada de referencia y la salida del sistema, sin embargo el efecto de la realimentación en sistemas de control es mucho más complejo que lo tratado hasta ahora. La reducción del error es sólo uno de los efectos que la realimentación realiza sobre el sistema, ya que también repercute en las características de desempeño del sistema como son: • Estabilidad • Ancho de banda • Ganancia global • Perturbaciones • Sensibilidad
Dispositivo de actuación Proceso( )r t
( )u t ( )y t
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
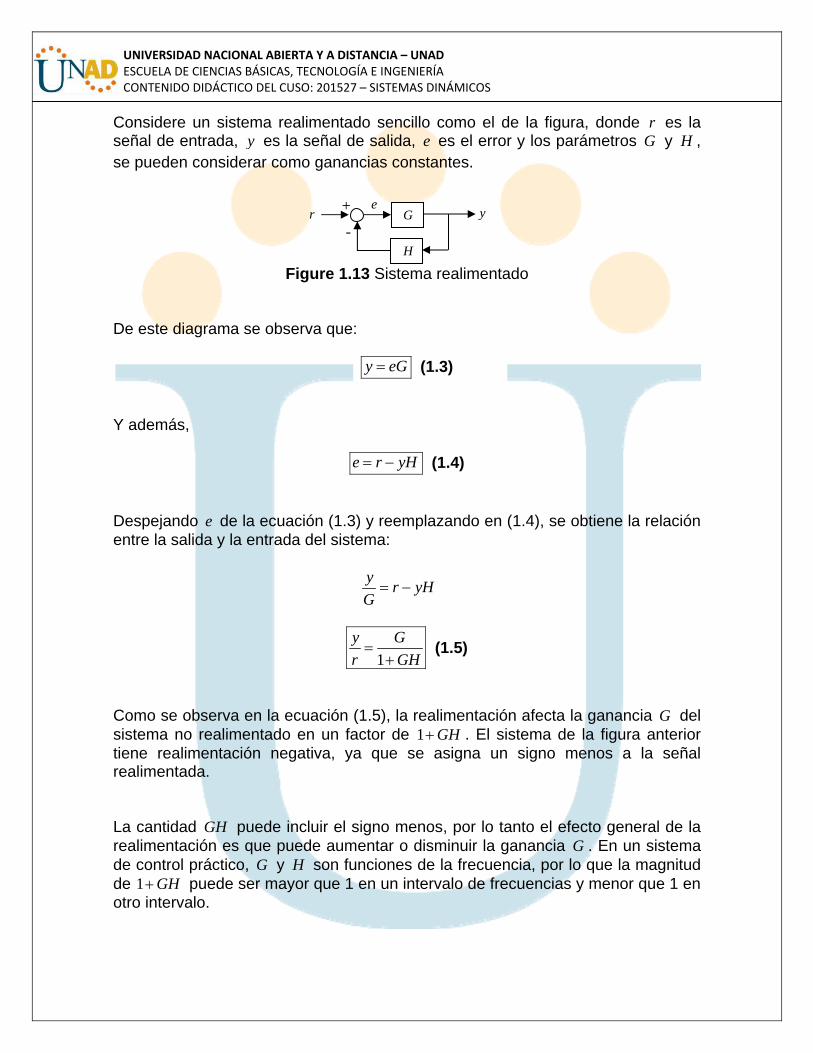
Considere un sistema realimentado sencillo como el de la figura, donde r es la señal de entrada, y es la señal de salida, e es el error y los parámetros G y H , se pueden considerar como ganancias constantes.
Figure 1.13 Sistema realimentado
De este diagrama se observa que:
y eG= (1.3) Y además,
e r yH= − (1.4) Despejando e de la ecuación (1.3) y reemplazando en (1.4), se obtiene la relación entre la salida y la entrada del sistema:
y r yHG= −
1y Gr GH=
+ (1.5)
Como se observa en la ecuación (1.5), la realimentación afecta la ganancia G del sistema no realimentado en un factor de 1 GH+ . El sistema de la figura anterior tiene realimentación negativa, ya que se asigna un signo menos a la señal realimentada. La cantidad GH puede incluir el signo menos, por lo tanto el efecto general de la realimentación es que puede aumentar o disminuir la ganancia G . En un sistema de control práctico, G y H son funciones de la frecuencia, por lo que la magnitud de 1 GH+ puede ser mayor que 1 en un intervalo de frecuencias y menor que 1 en otro intervalo.
G
H
+-
er y

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
De forma general, la estabilidad describe si un sistema es capaz de seguir un comando de entrada. Para observar el efecto de la realimentación sobre la estabilidad de un sistema nuevamente se hace referencia a la ecuación (1.5). Si
1GH = − , la salida del sistema del sistema tiende a infinito para cualquier entrada aplicada, y se dice que el sistema es inestable. Por lo tanto, se puede apreciar que la realimentación puede ocasionar que un sistema que originalmente es estable, se vuelva inestable. También puede ocurrir lo contrario, es decir, que mediante el uso de la realimentación se pueda estabilizar un sistema originalmente inestable. Desde el punto de vista de la estabilidad, el sistema de control en lazo abierto es más fácil de desarrollar, porque la estabilidad del sistema no es un problema importante. Por otra parte, la estabilidad es una función principal en el sistema de control en lazo cerrado, lo cual puede conducir a corregir en exceso errores que producen oscilaciones de amplitud constante o cambiante. Debido a que todos los elementos físicos tienen propiedades que van cambiando con el ambiente y con la edad, no se pueden considerar los parámetros de un sistema de control como completamente estacionarios durante la vida de operación del mismo, es por eso que las consideraciones sobre sensibilidad son importantes cuando se trata con sistemas de control. Una ventaja del sistema de control en lazo cerrado es que el uso de la realimentación vuelve la respuesta del sistema relativamente insensible a las perturbaciones externas y a las variaciones internas en los parámetros del sistema. Por lo tanto, es posible usar componentes relativamente precisos y baratos para obtener el control adecuado de una planta determinada, en tanto que hacer eso es imposible en el caso de un sistema en lazo abierto. Debe señalarse que, para los sistemas en los que se conocen con anticipación las entradas y en los cuales no hay perturbaciones, es aconsejable emplear un control en lazo abierto. Los sistemas de control en lazo cerrado sólo tienen ventajas cuando se presentan perturbaciones impredecibles y/o variaciones impredecibles en los componentes del sistema. En general, la realimentación también tiene efectos sobre el ancho de banda, la impedancia, la respuesta transitoria y la respuesta en frecuencia.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
La cantidad de componentes usados en un sistema de control en lazo cerrado es mayor que la que se emplea para un sistema de control equivalente en lazo abierto. Por lo tanto, el sistema de control en lazo cerrado suele tener costos más grandes. Por lo general, una combinación adecuada de controles en lazo abierto y en lazo cerrado es menos costosa y ofrecerá un desempeño satisfactorio del sistema general. Lección 5: MÉTODOS DE CONTROL Existen métodos y estrategias para realizar la acción de control, los métodos de control (clásico y moderno) permiten al controlador reaccionar mandando una señal correctiva del error, mientras que las estrategias de control, hacen más eficiente a la labor de control, ahorrando recursos y tiempo. 1. MÉTODOS DE CONTROL CLÁSICO Los métodos de control clásico son aquellos que esperan a que se produzca un error para luego realizar una acción correctiva. El error se presenta a causa de la diferencia de lectura entre la variable de salida medida y la señal de referencia, este error está presente en todo momento, y la finalidad es minimizarlo. En algunos casos suele generarse un comportamiento oscilatorio alrededor del valor de referencia. Los métodos de control clásico pueden ser: • Control ON/OFF: Este método solo acepta dos posiciones para el actuador:
encendido (100%) y apagado (0%). La lógica de funcionamiento es tener un punto de referencia, si la variable es mayor el actuador asume una posición, y si la variable es menor el actuador asume la otra posición. Por ejemplo, los sistemas de seguridad contra robos, las refrigeradoras domésticas, sistemas de aire acondicionado, etc.
• Control Proporcional: Es un control que se basa en la ganancia aplicada al
sistema, se basa en el principio de que la respuesta del controlador deber ser proporcional a la magnitud del error. No corrige ni elimina perturbaciones, puede atenuar o aumentar la señal de error.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Control Integral: Conocido como RESET. Este tipo de controlador anula errores y corrige perturbaciones, mediante la búsqueda de la señal de referencia, necesita de un tiempo para localizar dicha señal.
• Control Derivativo: Conocido como RATE. Este controlador por sí solo no es
utilizado, necesita estar junto al proporcional y al integral. Sirve para darle rapidez o aceleración a la acción de control. Necesita de una diferencial de tiempo para alcanzar la señal de referencia.
• Control Proporcional-Integral: Actúa en forma rápida, tiene una ganancia y
corrige el error, no experimenta un offset en estado estacionario. La aplicación típica es en el control de temperatura.
• Control Proporcional-Derivativo: Es estable, y reduce los retardos, es decir
es más rápido. Es usado típicamente para el control de flujo de minerales. • Control Proporcional-Integral-Derivativo: Este controlador es el más
completo y complejo, tiene una respuesta más rápida y estable siempre que esté bien sintonizado. Resumiendo se puede decir que:
El control proporcional actúa sobre el tamaño del error.
El control integral rige el tiempo para corregir el error.
El control derivativo le brinda la rapidez a la actuación. 2. MÉTODOS DE CONTROL MODERNO Los métodos de control moderno brindan nuevas técnicas que permiten ya sea compensar el error y/o eliminarlo, las más comunes son las siguientes: • Control Anticipatorio (Feedforward): Este método permite al controlador
analizar los datos de entrada y de salida y mediante algoritmos matemáticos calculará la próxima salida probable, de modo tal que auto ajusta sus parámetros con la finalidad de adecuarse al cambio, y minimizar la diferencia de medidas. Se recomienda para procesos lentos. Su desventaja radica en que es necesario medir todas las variables perturbadoras, ya que no corrige las perturbaciones no medidas. Se puede mejorar este método agregando una retroalimentación a la salida, de modo tal que se deje que se produzca un error mínimo, el cual será detectado y corregido en la siguiente medición.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Compensadores Adelanto-Atraso: Este método permite realizar un control
en el dominio de la frecuencia, en el cual se busca compensar la fase del sistema, agregando (adelanto) o quitando (atraso) fase, para lo cual se agregan nuevos componentes o nuevas funciones matemáticas al sistema. Se puede poner cuantos compensadores sean necesarios a fin de llevar la respuesta del sistema a un valor deseado.
• Realimentación de Estados: Este método permite ejercer una acción de
control mediante la medición de cada uno de los estados (del modelo en espacio estado del sistema), atribuyéndole una ganancia a cada uno de los valores leídos, de este modo el lazo de control es cerrado por medio del compensador o controlador de estados y no por el sensor.
• Sistemas de Seguimiento: Este método también es conocido como tracking,
es un complemento del método anterior, puesto que mediante el control por realimentación de estados se puede llevar la variable controlada a un valor de cero (porque no se cuenta con una referencia), con este método se podrá llevar a la variable dada a un valor deseado, puesto que se incorpora una referencia en el sistema.
• Feedback Linealization: Debido a que los procesos reales no cuentan con
modelos lineales que los representan, es necesario el uso de controladores no lineales. Este método es conocido como control con modelo de referencia, utiliza la teoría de Lyapunov para determinar la estabilidad del sistema, y el modelo matemático esta dado en la forma espacio estado.
3. MÉTODOS DE CONTROL AVANZADO Los métodos de control avanzado son aquellos que actúan en forma preventiva, de modo tal que en base a los datos tomados, actúan de modo tal que previenen la ocurrencia de error, por tanto el controlador está ajustando sus parámetros constantemente. • Control Adaptativo: Es una variante del control anticipatorio, en donde la
respuesta del controlador varía automáticamente basado en los cambios de las condiciones dentro del proceso, es decir, la respuesta del controlador será variable dependiendo del comportamiento actual del proceso. Para que se lleve a cabo esta adaptación se requiere de algoritmos matemáticos que simulen el proceso en base a los datos tomados en el instante mismo en que se realiza la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
acción, este resultado va a generar una señal compensadora que garantizará la confiabilidad del sistema.
• Control Óptimo: El control óptimo busca el mejor desempeño en la acción de
control, tiene por objetivo buscar una o varias soluciones que cumplan con ciertas restricciones impuestas por el problema y que a la vez cumpla con una función objetivo (función de costo), la cual puede ser maximizar o minimizar dicha función. El control permite diversas soluciones para un mismo problema, pero el control óptimo busca dentro de esas soluciones la más adecuada para cumplir con los requisitos planteados.
• Control Robusto: El control robusto es aquel que va a permitir mantener la
acción de control pese a perturbaciones externas e internas. Pueden existir perturbaciones externas como ruido y vibraciones propias del proceso; o perturbaciones internas como un mal modelamiento matemático, sistemas no lineales difíciles de linealizar, incertidumbre en el accionar, entre otros. El control robusto se resume a identificar y controlar la incertidumbre en los parámetros y en el comportamiento de una planta.
• Control en Tiempo Real: Se define el control de sistemas en tiempo real,
como el control realizado en un intervalo de tiempo finito y constante, es decir que la información será medida con muestras intermitentes pero todas las veces con un mismo tiempo de muestreo.
• Control Difuso: Se basa en la lógica difusa, la cual a diferencia de la lógica
binaria o booleana (verdadero/falso ó 1/0), asigna valores intermedios dentro de esta escala. Utiliza la experiencia del operador para generar una lógica de razonamiento para el controlador. No requiere del modelamiento matemático de la planta, puede representar modelos de sistemas lineales y no lineales mediante el uso de variables lingüísticas y una serie de condiciones o reglas previamente definidas.
• Control Neuronal: Hace uso de neuronas de inteligencia artificial. La neurona
artificial estándar es un elemento de procesamiento que calcula una salida multiplicando su vector de entradas por un vector de pesos y este resultado es aplicado a una función de activación; un conjunto de neuronas conforman una red neuronal. Las redes neuronales son parte de la inteligencia artificial (AI) caracterizadas por su capacidad de aprendizaje, su velocidad mediante el procesamiento masivo en paralelo de datos y por la facilidad de modelado de sistemas y controladores no lineales.
• Algoritmos Genéticos: Este método simula la evolución natural de las
especies propuesta por Charles Darwin, fue ideado por John Holland en 1970. La información va sufriendo cambios igual que lo harían las especies, es decir

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
se van adaptando al entorno, lo cual se lleva a cabo por medio de los procesos de selección natural, mezcla y mutación. En cada ciclo (iteración) una parte del conjunto de hipótesis conocido como población actual, es reemplazado por una nueva población mediante las funciones evolutivas anteriores. Así sucesivamente en cada ciclo la población es evaluada en base a una función evolutiva, siendo conservados los datos más exactos, y siendo eliminados los datos que presentan error (selección natural). Para conservar el número de individuos (datos) estos son mezclados, lo cual genera nuevos individuos similares a sus procreadores. Finalmente cada cierto tiempo o dada cierta cantidad de individuos, algunos de los nuevos individuos son mutados aleatoriamente, pudiendo ser conservados o eliminados en la próxima iteración dependiendo de su utilidad dentro del sistema.
• Sistemas Expertos: Estos sistemas tratan de emular la experiencia adquirida
por uno o más seres humanos a lo largo del tiempo para realizar un trabajo. Este sistema tendrá en su memoria una base de datos con múltiples soluciones a un mismo problema, luego el sistema tendrá que escoger de entre esas soluciones a la que pueda aplicarse a fin de lograr los mejores resultados. El sistema se crea basándose en las experiencias humanas, la elección de la estructura de control dependerá de las características del trabajo en donde se aplicará, además el sistema podrá ir aprendiendo con el tiempo y almacenar sus propias experiencias, existe mucha analogía entre los sistemas expertos y los sistemas neuro-fuzzy.
2. CAPITULO 2: HERRAMIENTAS MATEMÁTICAS INTRODUCCIÓN Para la representación y el análisis de los sistemas dinámicos se utilizan herramientas matemáticas como la transformada de Laplace, cuando se trata de un sistema en tiempo continuo; o la transformada Z , cuando se trata de un sistema en tiempo discreto. La transformada de Laplace es un método operativo que aporta muchas ventajas cuando se usa para resolver ecuaciones diferenciales lineales de la forma:
1 1
1 1 0 1 1 01 1
n n m m
n m mn n m m
d y d y dy d u d u dua a a y b b b b u n m
dt dt dt dt dt dt
− −
− −− −+ + + + = + + + + ≥donde (2.1)
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Mediante el uso de la transformada de Laplace, es posible convertir muchas funciones comunes, tales como las funciones senoidales, las funciones senoidales amortiguadas y las funciones exponenciales, en funciones algebraicas de una variable compleja s . Las operaciones tales como la diferenciación y la integración se sustituyen por operaciones algebraicas en el plano complejo. Por lo tanto, una ecuación diferencial lineal se transforma en una ecuación algebraica, en términos de la variable compleja s . Si se despeja en la ecuación algebraica en s la variable dependiente, la solución de la ecuación diferencial se puede encontrar mediante una tabla de transformadas de Laplace o empleando una técnica de expansión en fracciones parciales. Una ventaja del método de la transformada de Laplace es que permite el uso de técnicas gráficas para predecir el desempeño del sistema, sin tener que resolver las ecuaciones diferenciales del sistema. Otra ventaja del método de la transformada de Laplace es que, cuando se resuelve la ecuación diferencial, es posible obtener simultáneamente tanto el componente transitorio como el componente de estado estable de la solución. Por otra parte, una herramienta matemática muy utilizada en el análisis y la síntesis de sistemas de control en tiempo discreto es la transformada Z . El papel de la transformada Z en sistemas en tiempo discreto es similar al de la transformada de Laplace en sistemas en tiempo continuo. En un sistema de control en tiempo discreto, una ecuación en diferencias lineal caracteriza la dinámica del sistema. Para determinar la respuesta del sistema a una entrada dada, se debe resolver dicha ecuación en diferencias. Con el método de la transformada Z , las soluciones a las ecuaciones en diferencias se convierten en un problema de naturaleza algebraica. (De la misma forma en que la transformada de Laplace transforma las ecuaciones diferenciales lineales invariantes en el tiempo en ecuaciones algebraicas en s , la transformada Z transforma las ecuaciones en diferencias lineales e invariantes en el tiempo en ecuaciones algebraicas en z ). El principal objetivo de este capitulo es presentar las definiciones de las transformadas (Laplace y Z ), los teoremas básicos asociados con ellas y los métodos para encontrar las transformadas inversas. También se estudia la
co01802286
Resaltado

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
solución de ecuaciones diferenciales mediante el método de la transformada de Laplace y la solución de ecuaciones en diferencias mediante el método de la transformada Z . Antes de iniciar con este estudio hay que aclarar que las señales en tiempo discreto surgen si el sistema involucra la operación de muestreo de señales en tiempo continuo.
Figure 2.1 Señales en tiempo continuo y en tiempo discreto
La señal muestreada es, (0), ( ), (2 ),...,x x T x T donde T es el periodo de muestreo. Dicha secuencia de valores que surge de la operación de muestreo normalmente se escribe como ( )x kT . Si el sistema incluye un proceso iterativo realizado por una computadora digital, la señal involucrada es una secuencia de números
(0), (1), (2)x x x . La secuencia de números normalmente se escribe como ( )x k , donde el argumento k indica el orden en el que se presentan los números en la secuencia, por ejemplo (0), (1), (2),...x x x . Aunque ( )x k es una secuencia de números, ésta se puede considerar como una señal muestreada de ( )x t cuando el periodo de muestreo T es 1 segundo. La transformada de Laplace se aplica a la señal en tiempo continuo ( )x t , mientras que la transformada Z se aplica a la señal muestreada ( )x kT y a la secuencia de números ( )x k . Sino se presenta confusión en el estudio al tratar con la transformada Z , de manera ocasional se emplean ( )x kT y ( )x k intercambiadas, es decir, para simplificar la presentación, en ocasiones se omite la aparición explícita de T y se escribe ( )x kT como ( )x k .
HOGAR
Resaltado

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Lección 1: TRANSFORMADA DE LAPLACE 1. FUNCIONES COMPLEJAS Antes de introducir el tema de la transformada de Laplace, se estudiarán los conceptos de variable y función compleja. También se revisará el teorema de Euler, que relaciona las funciones senoidales con las funciones exponenciales. Primero hay que recordar que un número complejo está compuesto de una parte real y una parte imaginaria, ambas son constantes. Si la parte real y/o la parte imaginaria son variables, el número complejo se denomina variable compleja. La transformada de Laplace usa la notación s para la variable compleja, esto es:
s jσ ω= + (2.2) Donde σ es la parte real y ω es la parte imaginaria. De forma gráfica en el plano s , la componente real está representada por el eje σ en la dirección horizontal y la componente imaginaria se mide a lo largo del eje vertical jω . La figura 2.2 muestra el plano complejo s , en donde cualquier punto arbitrario 1s s= está definido por las coordenadas 1σ σ= y 1ω ω= , o simplemente 1 1 1s jσ ω= + .
Figure 2.2 Plano complejo s
Se dice que la función ( )G s es una función compleja, si para cada valor de s existen uno o más valores correspondientes de ( )G s . Debido a que s se define con partes real e imaginaria, la función ( )G s también está representada por sus partes real e imaginaria, esto es:
( ) x yG s G jG= + (2.3)
1s
jω
σ
1ω
1σ
1 1jσ ω+
0

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En donde xG y yG son cantidades reales. La magnitud de ( )G s es:
2 2( ) x yG s G G= + (2.4) Y el ángulo θ de ( )G s es:
1tan y
x
GG
θ − ⎛ ⎞= ⎜ ⎟
⎝ ⎠ (2.5)
El ángulo se mide en sentido opuesto al movimiento de las manecillas del reloj, a partir del eje real positivo. El complejo conjugado de ( )G s es:
( ) x yG s G jG= − (2.6)
Si para cada valor de s existe sólo un valor correspondiente de ( )G s , se dice que
( )G s es una función univaluada. Por lo general, las funciones complejas que se encuentran en el análisis de sistemas de control lineales son funciones univaluadas de s . Una función ( )G s se llama función analítica en una región del plano s , si la función y todas sus derivadas existen en dicha región. Ejemplo 2.1 Determine si la siguiente función es analítica:
1( )( 1)
G ss s
=+
Solución: Es analítica en cada punto del plano s , excepto en los puntos 0s = y 1s = − , ya que en estos dos puntos el valor de la función tiende a infinito.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Ejemplo 2.2 Determine si la siguiente función es analítica:
( ) 2G s s= +
Solución: La función es analítica en todos los puntos del plano s . Los puntos en el plano s en los cuales la función ( )G s es analítica se denominan puntos ordinarios, en tanto que los puntos en el plano s en los cuales la función
( )G s no es analítica se denominan puntos singulares. Los puntos singulares en los cuales la función ( )G s o sus derivadas tienden a infinito se denominan polos. Ejemplo 2.3 Encuentre los polos de la siguiente función:
1( )1
G ss
=+
Solución: La función tiene un polo en 1s = − . Los puntos en los cuales la función ( )G s es igual a cero se denominan ceros. Ejemplo 2.4 Encuentre los polos y los ceros de la siguiente función:
2
10( 2)( )( 1)( 3)
sG ss s s
+=
+ +
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Solución: La función tiene polos sencillos en 0s = y 1s = − , tiene un polo repetido o de orden 2 en 3s = − , además tiene un cero sencillo o simple en 2s = − . Para finalizar, se revisará el teorema de Euler, el cual es de gran ayuda, ya que con el se puede expresar la función seno y la función coseno en términos de una función exponencial, esto es:
cos sinje jθ θ θ= + (2.7) Teniendo en cuenta que je θ− es el complejo conjugado de je θ , se tiene:
cos sin cos sinj je e j jθ θ θ θ θ θ−+ = + + −
cos2
j je eθ θ
θ−+
= (2.8)
cos sin cos sinj je e j jθ θ θ θ θ θ−− = + − +
sin2
j je ej
θ θ
θ−−
= (2.9)
2. DEFINICIÓN DE LA TRANSFORMADA DE LAPLACE La transformada de Laplace es una herramienta matemática utilizada para la solución de ecuaciones diferenciales lineales de la forma:
1 1
1 1 0 1 1 01 1
n n m m
n m mn n m m
d y d y dy d u d u dua a a y b b b b u n m
dt dt dt dt dt dt
− −
− −− −+ + + + = + + + + ≥donde (2.10)
En comparación con el método clásico de resolución de ecuaciones diferenciales lineales, la transformada de Laplace tiene dos características atractivas: • La solución de la ecuación homogénea y la solución particular se obtienen en
una sola operación. • La transformada de Laplace convierte la ecuación diferencial en una ecuación
algebraica en s . Entonces es posible manipular la ecuación mediante reglas

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
algebraicas simples para obtener la solución en el dominio s . La solución final se obtiene hallando la transformada inversa de Laplace.
Primero se presenta una definición de la transformada de Laplace y después se ofrecen ejemplos de las transformadas de Laplace en varias funciones comunes. Sean,
( )f t : una función en el tiempo t , tal que ( ) 0f t = para 0t < s : una variable compleja L : un símbolo operativo que indica que la cantidad a la que antecede
se va a transformar mediante la integral de Laplace 0
ste dt∞
−∫
( )F s : la transformada de Laplace de ( )f t
La transformada de Laplace de ( )f t se obtiene mediante:
[ ]0
( ) ( ) ( ) stf t F s f t e dt∞
−= = ∫L (2.11)
El proceso inverso de encontrar la función en el tiempo ( )f t a partir de la transformada de Laplace ( )F s se denomina transformada inversa de Laplace. La notación para la transformada inversa de Laplace es 1−L , la cual se encuentra a partir de ( )F s mediante la integral de inversión:
[ ]1 1( ) ( ) ( ) 02
para c j
st
c j
F s f t F s e ds tjπ
+ ∞−
− ∞
= = >∫L (2.12)
En donde c es una constante real cuyo valor es mayor que las partes reales de todas las singularidades de ( )F s . En la práctica rara vez se emplea esta integral para encontrar ( )f t , ya que existen métodos más sencillos para obtenerla.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
A continuación, se encontraran las transformadas de Laplace de algunas funciones que se utilizan con frecuencia. 3. TRANSFORMADA DE LAPLACE DE FUNCIONES ELEMENTALES 3.1. Función Impulso ó Delta de Dirac Algunos sistemas mecánicos suelen estar sometidos a una fuerza externa (o a una tensión eléctrica en el caso de los circuitos eléctricos) de gran magnitud, que solamente actúa durante un tiempo muy corto. Por ejemplo, una descarga eléctrica podría caer sobre el ala vibrante de un avión; a un cuerpo sujeto a un resorte podría dársele un fuerte golpe con un martillo, una pelota de tenis inicialmente en reposo, podría ser enviada velozmente por los aires al ser golpeada con violencia con una raqueta de tenis. La función impulso puede servir como un modelo para tal fuerza. La función impulso, conocida también como delta de Dirac o función delta es una función infinitamente angosta, infinitamente alta, cuya integral tiene un valor unitario. Tal vez, la manera más simple de visualizar esto, es usar un pulso rectangular que va de / 2ε− a / 2ε con una altura de 1/ε .
Figure 2.3 Aproximación a la función impulso
Al hacer que 0ε → , se observa que su ancho tiende a ser cero y su altura tiende a infinito conforme su área total permanece constante con un valor de uno. La función del impulso usualmente se escribe como ( )tδ .

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 2.4 Función impulso
Entonces, la función impulso puede ser definida así:
0( )
0 0para para
tf t
t∞ =⎧
= ⎨ ≠⎩
La transformada de Laplace de la función impulso es:
[ ]( ) 1f t =L 3.2. Función Escalón En ingeniería es común encontrar funciones que corresponden a estados de sí o no, o bien activo o inactivo. Por ejemplo, una fuerza externa que actúa sobre un sistema mecánico o una tensión eléctrica aplicada a un circuito, puede tener que suspenderse después de cierto tiempo. Para tratar de forma efectiva con estas funciones discontinuas conviene introducir una función especial llamada función escalón.
Figure 2.5 Función escalón

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Se puede definir la función escalón de la siguiente forma:
0 0( )
0para para
tf t
A t<⎧
= ⎨ ≥⎩
En donde A es una constante. Su transformada de Laplace es:
[ ]00
(0) (1)st stA A A AA Ae dt es s s s
∞∞− −= = − = − + =∫L
La función escalón en donde 1A = , se denomina función escalón unitario o función de Heaviside y se denota como ( )u t . 3.3. Función Rampa
Figure 2.6 Función rampa
Sea la función rampa,
0 0( )
0para para
tf t
At t<⎧
= ⎨ ≥⎩
En donde A es una constante y corresponde a la pendiente de la recta. La transformada de Laplace de la función rampa es:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ]0 0
st stAt Ate dt A te dt∞ ∞
− −= =∫ ∫L
Usando la fórmula 2 ( 1)ax
ax exe dx axa
= −∫ , se tiene:
[ ] 2 20 0
( 1)( )
stst e AAt A te dt A st
s s
∞∞ −− ⎡ ⎤
= = − − =⎢ ⎥−⎣ ⎦∫L
La función rampa en donde 1A = , se denomina función rampa unitaria y se denota como ( )r t . 3.4. Función Exponencial
Figure 2.7 Función exponencial
Considere la función exponencial de la figura 2.7 definida como:
0 0( )
0para para at
tf t
Ae t−
<⎧= ⎨ ≥⎩
En donde A y a son constantes. La transformada de Laplace de esta función exponencial se obtiene así:
( ) ( )
00 0
(0) (1)at at st a s t a s tA A A AAe Ae e dt A e dt es a s a s a s a
∞∞ ∞− − − − + − +⎡ ⎤ = = = − = − + =⎣ ⎦ + + + +∫ ∫L

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Se aprecia que la función exponencial produce un polo en el plano complejo. 3.5. Función Senoidal
Figure 2.8 Función senoidal
Sea una función senoidal como la de la figura 2.8, definida de la siguiente forma:
0 0( )
sin 0para para
tf t
A t tω<⎧
= ⎨ ≥⎩
En donde A y ω son constantes. Usando la fórmula de integración
2 2sin ( sin cos )ax
ax ee bx dx a bx b bxa b
= −+∫ , se tiene que la transformada de Laplace
es:
[ ] 2 2 2 20 0
( sin cos )sin sinst
st Ae s t t AA t A e t dts sω ω ω ωω ωω ω
∞∞ −− − −
= = =+ +∫L
Del mismo modo, se puede verificar que la transformada de Laplace de cosA tω es:
[ ] 2 2cos AsA ts
ωω
=+
L

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
El estudiante puede realizar la comprobación de esta última ecuación, como un ejercicio complementario que le permita afianzar los conocimientos adquiridos hasta el momento. Se observa que la transformada de Laplace de cualquier función ( )f t se puede encontrar al multiplicar la función por ste− , y luego evaluar la integral del producto entre 0t = y t = ∞ . No obstante, una vez conocido el método para obtener la transformada de Laplace, es posible usar las tablas de transformadas de Laplace para encontrar la transformada de una función ( )f t determinada. La tabla 2.1 muestra las transformadas de Laplace de funciones que se utilizarán con frecuencia en el análisis de sistemas de control.
Table 2.1 Pares de transformadas de Laplace ( )f t ( )F s 1 Impulso unitario ( )tδ 1
2 Escalón unitario ( )u t 1s
3 t 2
1s
4 1
( 1, 2,3,...)( 1)!
nt nn
−
=−
1ns
5 ( 1,2,3,...)nt n = 1
!n
ns +
6 ate− 1
s a+
7 atte− 2
1( )s a+
8 11 ( 1,2,3,...)( 1)!
n att e nn
− − =−
1( )ns a+
9 ( 1,2,3,...)n att e n− = 1
!( )n
ns a ++
10 sin tω 2 2sωω+
11 cos tω 2 2
ss ω+
12 sinh tω 2 2sωω−

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Tabla 2.1 Pares de transformadas de Laplace (continuación)
13 cosh tω 2 2
ss ω−
14 1 (1 )atea
−− 1
( )s s a+
15 1 ( )at bte e
b a− −−
−
1( )( )s a s b+ +
16 1 ( )bt atbe ae
b a− −−
−
( )( )s
s a s b+ +
17 1 11 ( )at btbe aeab a b
− −⎡ ⎤+ −⎢ ⎥−⎣ ⎦
1( )( )s s a s b+ +
18 2
1 (1 )at ate atea
− −− − 2
1( )s s a+
19 2
1 ( 1 )atat ea
−− + 2
1( )s s a+
20 sinate tω− 2 2( )s aω
ω+ +
21 cosate tω− 2 2( )s a
s a ω+
+ +
22 2
2sin 1 (0 1)
1ntn
ne tζϖω ω ζ ζζ
− − < <−
2
2 22n
n ns sωζω ω+ +
23
( )2
2
1 sin 1 (0 1, 0 2)1
ntne tζϖ ω ζ φ ζ φ π
ζ−− − + < < < <
−
21 1
tanζ
φζ
−⎛ ⎞−⎜ ⎟=⎜ ⎟⎝ ⎠
2 22 n n
ss sζω ω+ +
24
( )2
2
11 sin 1 (0 1, 0 2)1
ntne tζϖ ω ζ φ ζ φ π
ζ−− − + < < < <
−2
1 1tan
ζφ
ζ−⎛ ⎞−⎜ ⎟=⎜ ⎟⎝ ⎠
2
2 2( 2 )n
n ns s sωζω ω+ +
25 1 cos tω− 2
2 2( )s sω
ω+
26 sint tω ω− 3
2 2 2( )s sω
ω+

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Tabla 2.1 Pares de transformadas de Laplace (continuación)
27 sin cost t tω ω ω− 3
2 2 2
2( )s
ωω+
28 1 sin
2t tω
ω 2 2 2( )
ss ω+
29 cost tω 2 2
2 2 2( )ss
ωω−+
30 2 21 2 1 22 2
2 1
1 (cos cos ) ( )t tω ω ω ωω ω
− ≠−
2 2 2 21 2( )( )
ss sω ω+ +
31 1 (sin cos )
2t t tω ω ω
ω+
2
2 2 2( )s
s ω+
32 1 sin
2atte tω
ω− 22 2( )
s a
s a ω
+
⎡ ⎤+ +⎣ ⎦
33 cosatte tω− 2 2
22 2
( )
( )
s a
s a
ω
ω
+ −
⎡ ⎤+ +⎣ ⎦
Lección 2: PROPIEDADES Y TEOREMAS DE LA TRANSFORMADA DE LAPLACE Las aplicaciones de la transformada de Laplace, en muchos casos se simplifican al emplear las propiedades de la transformada. 1. MULTIPLICACIÓN POR UNA CONSTANTE Sea A una constante y ( )F s la transformada de Laplace de ( )f t , entonces:
[ ] [ ]( ) ( ) ( )Af t A f t AF s= =L L (2.13)
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
2. LINEALIDAD Sean 1( )F s y 2 ( )F s las transformadas de Laplace de 1( )f t y 2 ( )f t , respectivamente, entonces:
[ ] [ ] [ ]1 2 1 2 1 2( ) ( ) ( ) ( ) ( ) ( )f t f t f t f t F s F s± = ± = ±L L L (2.14) Ejemplo 2.5 Encuentre la transformada de Laplace de la función ( ) 3 5sin 2f t t t= − Solución: Aplicando las propiedades de multiplicación por una constante y de linealidad se tiene:
[ ] [ ] [ ]2
2 2 2 2 2
1 2 7 123 5sin 2 3 5 sin 2 3 52 ( 4)
st t t ts s s s
− +⎛ ⎞ ⎛ ⎞− = − = − =⎜ ⎟ ⎜ ⎟+ +⎝ ⎠ ⎝ ⎠L L L
3. TRASLACIÓN COMPLEJA La transformada de Laplace de ( )f t multiplicada por ate∓ , donde a es una constante, es igual a la transformada de Laplace ( )F s , con s reemplazada por s a± , esto es:
[ ]( ) ( ) ( )ats s a
e f t f t F s a= ±
⎡ ⎤ = = ±⎣ ⎦L L∓ (2.15) Ejemplo 2.6 Encuentre la transformada de Laplace de la función 5 3( ) tf t e t−= Solución: Aplicando la propiedad de traslación compleja se encuentra que su transformada de Laplace es:
5 3 34 45
5
3! 6( 5)
t
s ss s
e t ts s
−
= += +
⎡ ⎤ ⎡ ⎤= = =⎣ ⎦ ⎣ ⎦ +L L

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
4. TRASLACIÓN EN EL TIEMPO La transformada de Laplace de ( )f t retrasada un tiempo a , es igual a la transformada de Laplace de ( )f t multiplicada por ase− , esto es:
[ ] [ ]( ) ( ) ( )as asf t a e f t e F s− −− = =L L (2.16) Ejemplo 2.7 Encuentre la transformada de Laplace de la función 3( ) ( 2)f t t= − Solución: Aplicando la propiedad de traslación en el tiempo se encuentra que su transformada de Laplace es:
23 2 3 2
4 4
3! 6( 2)s
s s et e t es s
−− − ⎛ ⎞⎡ ⎤ ⎡ ⎤− = = =⎜ ⎟⎣ ⎦ ⎣ ⎦ ⎝ ⎠
L L
5. CAMBIO DE ESCALA La transformada de Laplace de ( )f t a , donde a es una constante, es igual a la multiplicación de a por la transformada de Laplace ( )F s , con s reemplazada por as , esto es:
[ ] [ ]( ) ( ) ( )s as
f t a a f t aF as=
= =L L (2.17) Ejemplo 2.8 Encuentre la transformada de Laplace de la función ( ) sin( 2)f t t= Solución: Aplicando la propiedad de cambio de escala se encuentra que su transformada de
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Laplace es:
[ ] [ ] 2 222
1 2sin( 2) 2 sin 21 4 1s s
s s
t ts s=
=
⎛ ⎞= = =⎜ ⎟+ +⎝ ⎠L L
6. DIFERENCIACIÓN REAL Sea ( )F s la transformada de Laplace de ( )f t , y (0)f es la función evaluada en
0t = . La transformada de Laplace de la derivada de ( )f t con respecto al tiempo es:
( ) ( ) (0)df t sF s fdt
⎡ ⎤ = −⎢ ⎥⎣ ⎦L (2.18)
En general, para las derivadas de orden superior de ( )f t , se tiene:
1 2 1 2 ( 3) ( 2) ( 1)( )( ) (0) (0) (0) (0) (0)
nn n n n n n
n
d f ts F s s f s f s f sf f
dt− − − − −= − − − − − −
⎡ ⎤⎢ ⎥⎣ ⎦
L (2.19)
En donde ( ) (0)if denota la derivada de i-ésimo orden de ( )f t con respecto a t , evaluada en 0t = . Ejemplo 2.9 Encuentre la transformada de Laplace de la función:
'( ) cosf t tω= Solución: Como se conoce que '( ) cosf t tω= es la derivada de la función
1( ) sinf t tωω
=

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Se puede hallar su transformada de Laplace aplicando la propiedad de diferenciación real, esto es:
[ ] [ ] 2 2 2 2
1cos sin sin(0)s s st ts sωω ω
ω ω ω ω ω⎛ ⎞= − = =⎜ ⎟+ +⎝ ⎠
L L
7. INTEGRACIÓN REAL La transformada de Laplace de la integral de ( )f t con respecto al tiempo, es ( )F s dividida entre s , esto es:
0
( )( )t F sf t dt
s⎡ ⎤
=⎢ ⎥⎣ ⎦∫L (2.20)
Para la integración de n-ésimo orden se tiene:
1 2
1 20 0 0
( )( )ntt t
n n
F sf t dt dt dts
⎡ ⎤=⎢ ⎥
⎢ ⎥⎣ ⎦∫ ∫ ∫L (2.21)
Ejemplo 2.10 Hallar la transformada de Laplace de la integral de la función ( )f t , donde:
( ) sin 2f t t= Solución: Al aplicar la propiedad de la integración real se obtiene que la transformada de Laplace es:
[ ] 2 2 2
1 1 2 2sin 2 sin 22 ( 4)
tdt ts s s s s
⎛ ⎞⎡ ⎤ = = =⎜ ⎟⎣ ⎦ + +⎝ ⎠∫L L

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
8. DIFERENCIACIÓN COMPLEJA Si ( )f t se puede transformar mediante el método de Laplace, entonces:
[ ]( ) ( )dtf t F sds
= −L (2.22)
De forma general,
( ) ( 1) ( )n
n nn
dt f t F sds
⎡ ⎤ = −⎣ ⎦L (2.23)
Ejemplo 2.11 Hallar la transformada de Laplace de 2 2tt e− Solución: Aplicando la propiedad de diferenciación compleja se puede apreciar que
2( ) tf t e−= , entonces
22 2 2
2( 1) ( )t dt e F sds
−⎡ ⎤ = −⎣ ⎦L
Donde 1( )2
F ss
=+
, por lo que
2
2 2 22 3
1 2( 1)2 ( 2)
t dt eds s s
− ⎛ ⎞⎡ ⎤ = − =⎜ ⎟⎣ ⎦ + +⎝ ⎠L
9. TEOREMA DEL VALOR INICIAL Si la transformada de Laplace de ( )f t es ( )F s , entonces:
0lim ( ) lim ( )t s
f t sF s→ →∞
= (2.24)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
10. TEOREMA DEL VALOR FINAL Si la transformada de Laplace de ( )f t es ( )F s , y si ( )F s es analítica sobre el eje imaginario y en el semiplano derecho del plano s , entonces:
0lim ( ) lim ( )t s
f t sF s→∞ →
= (2.25)
Este teorema es de utilidad en diversas aplicaciones, donde puede ser necesario encontrar el valor final (valor de estado estacionario) de la salida de un sistema sin conocer la función en el dominio del tiempo. Sin embargo, el teorema del valor final sólo es válido si ( )sF s no tiene polos sobre el eje jω o en el semiplano derecho del plano s . Ejemplo 2.12 Encuentre el valor hacia el cual tiende la función ( )f t , si:
2
5( )( 2)
F ss s s
=+ +
Solución: Debido a que ( )sF s es analítica sobre el eje imaginario y en el semiplano derecho del plano s , el teorema del valor final puede ser aplicado. Utilizando la ecuación (2.25), se tiene:
20 0
5 5lim ( ) lim ( ) lim2 2t s s
f t sF ss s→∞ → →
= = =+ +
11. INTEGRAL DE CONVOLUCIÓN Sean 1( )F s y 2 ( )F s las transformadas de Laplace de 1( )f t y 2 ( )f t , respectivamente, entonces:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ] [ ] [ ]1 2 1 2 1 2 1 20
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )t
f f t d f t f t f t f t F s F sτ τ τ⎡ ⎤
− = ∗ = =⎢ ⎥⎣ ⎦∫L L L L (2.26)
Donde el símbolo “∗ ” denota la convolución en el dominio del tiempo. Ejemplo 2.13 Encuentre la transformada de Laplace de la convolución entre:
1( )f t t= y 2 ( ) 1 tf t e−= − Solución: Debido a que,
1 2
1( )F ss
= y 21 1( )
1F s
s s= −
+
Entonces la transformada de Laplace de la convolución se obtiene así:
1 2 2 3 2
1 1 1 1 1 1 1( ) (1 ) ( ) ( )1 1
tt e F s F ss s s s s s s
− ⎛ ⎞⎛ ⎞⎡ ⎤∗ − = = − = − + −⎜ ⎟⎜ ⎟⎣ ⎦ + +⎝ ⎠⎝ ⎠L
Ahora se verifica que la solución obtenida es en verdad la transformada de Laplace de la integral de convolución, primero se realiza la integral de convolución y después se le aplica la transformada de Laplace al resultado obtenido:
2( ) )
1 20 0
( ) ( ) ( )(1 ) ( )(1 ) 12
t tt ttf t f t e d t e d t eτ ττ τ τ τ− − − −∗ = − = − − = − + −∫ ∫
Entonces,
2
3 2
1 1 1 112 1
tt t es s s s
−⎡ ⎤− + − = − + −⎢ ⎥ +⎣ ⎦
L
Lo que concuerda con el resultado obtenido anteriormente.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
La tabla 2.2 resume las propiedades y teoremas de la transformada de Laplace.
Table 2.2 Propiedades de la transformada de Laplace 1 [ ]( ) ( )Af t AF s=L
2 [ ]1 2 1 2( ) ( ) ( ) ( )f t f t F s F s± = ±L
3 ( ) ( ) (0)d f t sF s fdt⎡ ⎤ = −⎢ ⎥⎣ ⎦
L
4 2
2 (1)2 ( ) ( ) (0) (0)d f t s F s sf f
dt⎡ ⎤
= − −⎢ ⎥⎣ ⎦
L
5 1
( 1) ( 1)1
1( ) ( ) (0) ( ) ( )donde
n knn n k k k
n kk
d df t s F s s f f t f tdt dt
−− − −
−=
⎡ ⎤= − =⎢ ⎥
⎣ ⎦∑L
6 0
( )( )t F sf t dt
s⎡ ⎤
=⎢ ⎥⎣ ⎦∫L
7 1 2
1 20 0 0
( )( )ntt t
n n
F sf t dt dt dts
⎡ ⎤=⎢ ⎥
⎢ ⎥⎣ ⎦∫ ∫ ∫L
8 0
0 0
( ) lim ( ) ( )si existes
f t dt F s f t dt∞ ∞
→=∫ ∫
9 ( ) ( )ate f t F s a⎡ ⎤ = ±⎣ ⎦L ∓
10 [ ]( ) ( ) 0donde asf t a e F s a−− = ≥L
11 [ ]( ) ( )dtf t F sds
= −L
12 2
22( ) ( )dt f t F s
ds⎡ ⎤ =⎣ ⎦L
13 ( ) ( 1) ( )n
n nn
dt f t F sds
⎡ ⎤ = −⎣ ⎦L
14 0
1 1( ) ( ) lim ( )si existet
s
f t F s ds f tt t
∞
→
⎡ ⎤ =⎢ ⎥⎣ ⎦ ∫L
15 [ ]( ) ( )f t a aF as=L
16 1 2 1 20
( ) ( ) ( ) ( )t
f f t d F s F sτ τ τ⎡ ⎤
− =⎢ ⎥⎣ ⎦∫L
17 [ ] 1( ) ( ) ( ) ( )2
c j
c j
f t g t F p G s p dpjπ
+ ∞
− ∞
= −∫L

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Lección 3: TRANSFORMADA INVERSA DE LAPLACE Si la transformada de Laplace de una función ( )f t es ( )F s , es decir, si
[ ]( ) ( )f t F s=L , entonces ( )f t se denomina la transformada inversa de Laplace de ( )F s y se expresa
[ ]1( ) ( )f t F s−=L (2.27) Donde 1−L se llama el operador transformada inversa de Laplace. Ejemplo 2.14 Encuentre la transformada inversa de Laplace de:
2 2( )s a
s a ω+
+ +
Solución: Conociendo que
2 2cos( )
at s ae ts a
ωω
− +⎡ ⎤ =⎣ ⎦ + +L
Entonces,
12 2 cos
( )ats a e t
s aω
ω− −⎡ ⎤+
=⎢ ⎥+ +⎣ ⎦L
Existen varios métodos para determinar transformadas inversas de Laplace, algunos de los cuales son: • Métodos de las fracciones parciales (uno de esos métodos hace uso del
teorema del desarrollo de Heaviside).

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Método de las series. • Método de las ecuaciones diferenciales. • Método de la fórmula de inversión compleja también denominada fórmula
integral de Bromwich En este texto se usará el método de expansión en fracciones parciales y se hará énfasis en algunos de los casos que se pueden presentar. 1. FRACCIONES PARCIALES Para problemas de análisis de sistemas de control, ( )F s es la transformada de Laplace de ( )f t y con frecuencia se presenta de la forma:
1 20 1 2 1
1 21 2 1
( )( )( )
m mm m m
n nn n n
b s b s b s b s bB sF sA s s a s a s a s a
−− −
−− −
+ + + + += =
+ + + + + (2.28)
En donde, ( )A s y ( )B s son polinomios en s . Durante la expansión de
( ) ( ) / ( )F s B s A s= en fracciones parciales, es importante que la potencia más alta de s en ( )A s sea mayor que la potencia más alta de s en ( )B s , en otras palabras, que el grado del polinomio ( )A s sea mayor que el grado del polinomio ( )B s . Si tal no es el caso, el numerador ( )B s debe dividirse entre el denominador ( )A s para producir un polinomio en s además de un residuo, es decir, la función sobre la cual se aplica la expansión en fracciones parciales debe ser una función propia. 1.1. Raíces Reales Simples Suponga que ( )F s puede escribirse de forma factorizada como:
1 2
1 2
( )( ) ( )( )( )( ) ( )( ) ( )
m
n
K s z s z s zB sF s m nA s s p s p s p
+ + += = <
+ + +para (2.29)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Donde 1 2, , , np p p… son los polos de la función y 1 2, , , mz z z… corresponden a los ceros. Si ( )F s sólo involucra polos distintos, entonces se puede escribir de la forma
1 2
1 2
( )( )( ) ( ) ( ) ( )
n
n
aa aB sF sA s s p s p s p
= = + + ++ + +
(2.30)
En donde 1 2, , , na a a… se denominan residuos y son valores constantes. Para determinar el valor de ka se multiplican ambos miembros de la ecuación (2.30) por
ks p+ y se evalúa la función en ks p= − , lo que conduce a lo siguiente:
1 2
1 2
( ) ( ) ( ) ( )( )( )( ) ( ) ( ) ( ) ( )
k k
k k k k n kk
k ns p s p
a s p a s p a s p a s pB ss pA s s p s p s p s p=− =−
⎡ ⎤⎡ ⎤ + + + ++ = + + + + +⎢ ⎥⎢ ⎥ + + + +⎣ ⎦ ⎣ ⎦
Se observa que todos los términos se cancelan a excepción de ka . Por lo tanto el residuo ka se encuentra a partir de:
( )( )( )
k
k ks p
B sa s pA s =−
⎡ ⎤= +⎢ ⎥⎣ ⎦
(2.31)
Ejemplo 2.15 Encuentre la función ( )f t , utilizando el método de expansión en fracciones parciales, para la función:
2
3 2
2 11 19( )6 11 6
s sF ss s s
+ +=
+ + +
Solución: Inicialmente, se reescribe la función ( )F s como:
22 11 19( )( 1)( 2)( 3) 1 2 3
s s A B CF ss s s s s s
+ += = + +
+ + + + + +
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Donde,
[ ]2 2
11 1
2
2 11 19 2 11 19( 1) ( ) ( 1)( 1)( 2)( 3) ( 2)( 3)
2( 1) 11( 1) 19 2 11 19 10 5( 1 2)( 1 3) (1)(2) 2
ss s
s s s sA s F s ss s s s s
A
=−=− =−
⎡ ⎤ ⎡ ⎤+ + + += + = + =⎢ ⎥ ⎢ ⎥+ + + + +⎣ ⎦ ⎣ ⎦
− + − + − += = = =
− + − +
[ ]2 2
22 2
2
2 11 19 2 11 19( 2) ( ) ( 2)( 1)( 2)( 3) ( 1)( 3)
2( 2) 11( 2) 19 8 22 19 5 5( 2 1)( 2 3) ( 1)(1) 1
ss s
s s s sB s F s ss s s s s
B
=−=− =−
⎡ ⎤ ⎡ ⎤+ + + += + = + =⎢ ⎥ ⎢ ⎥+ + + + +⎣ ⎦ ⎣ ⎦
− + − + − += = = = −
− + − + − −
[ ]2 2
33 3
2
2 11 19 2 11 19( 3) ( ) ( 3)( 1)( 2)( 3) ( 1)( 2)
2( 3) 11( 3) 19 18 33 19 4 2( 3 1)( 3 2) ( 2)( 1) 2
ss s
s s s sC s F s ss s s s s
C
=−=− =−
⎡ ⎤ ⎡ ⎤+ + + += + = + =⎢ ⎥ ⎢ ⎥+ + + + +⎣ ⎦ ⎣ ⎦
− + − + − += = = =
− + − + − −
Una vez determinados los residuos se sustituyen en ( )F s
22 11 19 5 5 2( )( 1)( 2)( 3) 1 2 3
s sF ss s s s s s
+ + −= = + +
+ + + + + +
Ahora se aplica la transformada inversa de Laplace a ( )F s para hallar ( )f t
[ ]1 1
1 1 1 2 3
5 5 2( ) ( )1 2 3
1 1 1( ) 5 5 2 5 5 21 2 3
t t t
f t F ss s s
f t e e es s s
− −
− − − − − −
⎡ ⎤= = − +⎢ ⎥+ + +⎣ ⎦⎡ ⎤ ⎡ ⎤ ⎡ ⎤= − + = − +⎢ ⎥ ⎢ ⎥ ⎢ ⎥+ + +⎣ ⎦ ⎣ ⎦ ⎣ ⎦
L L
L L L
1.2. Raíces Complejas Simples Ya que las raíces complejas de un polinomio con coeficientes reales siempre aparecen en pares conjugados, se puede suponer que ( )F s tiene la forma:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1
( ) ( )( )( ) ( )( ) ( )
B s B sF sA s s j s j D sα β α β
= =+ + + −
(2.32)
Donde jα β− − y jα β− + no son raíces de 1( )D s . Entonces se puede escribir
( )F s como
1( ) ( )K KF s F ss j s jα β α β
∗
= + ++ + + −
(2.33)
Donde se determina K y su complejo conjugado K ∗ . Expresado de otra forma,
1 1
( ) ( )( ) ( )( ) ( ) ( 2 ) ( )
s j
B s B jK s j F ss j D s j D j
α β
α βα βα β β α β
=− −
− −= + + = =
+ − − − − (2.34)
Una vez se han determinado K y K ∗ , pueden combinarse los dos términos correspondientes como se indica a continuación. Suponga que,
K x jy= + y K x jy∗ = − Entonces,
2 2
2 2
( )( ) ( )( )( )( )
( ) ( )( )
2 ( ) 2( )
K K x jy x jys j s j s j s j
x jy s j x jy s js j s j
xs x jx jys jy y xs x jx jys jy ys
x s ys
α β α β α β α βα β α βα β α β
α β α β α β α βα β
α βα β
∗ + −+ = +
+ + + − + + + −+ + − + − + +
=+ + + −
+ − + + + + + + − − +=
+ ++ +
=+ +
2 2 2 2
( )2 2( ) ( )
K K sx ys j s j s s
α βα β α β α β α β
∗ ++ = + +
+ + + − + + + + (2.35)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Esta última ecuación se puede usar cuando la función tiene raíces complejas. No olvidar que,
11 12 2
12 22 2
( ) cos( )
sin( )
t
t
sA Ae ts
A A e ts
α
α
α βα β
β βα β
− −
− −
⎡ ⎤+=⎢ ⎥+ +⎣ ⎦
⎡ ⎤=⎢ ⎥+ +⎣ ⎦
L
L
Ejemplo 2.16 Hallar la transformada inversa de Laplace de la función:
2
3 2
10 15 5( )2 5
s sF ss s s
+ −=
+ +
Solución: Inicialmente, se reescribe la función ( )F s como:
2 2
3 2
10 15 5 10 15 5( )2 5 ( 1 2)( 1 2) 1 2 1 2
s s s s A B BF ss s s s s j s j s s j s j
∗+ − + −= = = + +
+ + + + + − + + + −
Donde,
[ ]2 2
2 200 0
2
2
10 15 5 10 15 5( )( 2 5) 2 5
10(0) 15(0) 5 1(0) 2(0) 5
ss s
s s s sA sF s ss s s s s
A
== =
⎡ ⎤ ⎡ ⎤+ − + −= = =⎢ ⎥ ⎢ ⎥+ + + +⎣ ⎦ ⎣ ⎦
+ −= = −
+ +

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ]2
1 21 2
2 2
1 2
10 15 5( 1 2) ( ) ( 1 2)( 1 2)( 1 2)
10 15 5 10( 1 2) 15( 1 2) 5( 1 2) ( 1 2)( 1 2 1 2)
10 40 40 15 30 5 50 10 50 10( 1 2)( 4) 8 4
s js j
s j
s sB s j F s s js s j s j
s s j jBs s j j j j
j j j jBj j j
=− −=− −
=− −
⎡ ⎤+ −= + + = + +⎢ ⎥+ + + −⎣ ⎦
⎡ ⎤+ − − − + − − −= =⎢ ⎥+ − − − − − + −⎣ ⎦
+ − − − − − + − += = =
− − − − + −8 4
8 4 8 4400 200 80 40 440 120 44 12 11 3
64 16 80 8 8 2 2
jj j
j j jB j j
⎛ ⎞− −⎜ ⎟+ − −⎝ ⎠
+ − + += = = + = +
+
Como 11 32 2
B j= + , entonces su conjugado es 11 32 2
B j∗ = −
Luego,
11 3 11 31 2 2 2 2( )
1 2 1 2
j jF s
s s j s j
+ −−= + +
+ + + −
Conociendo que
11 3 11 32 2 2 2
1 2 1 2
j j x jy x jys j s j s j s jα β α β
+ − + −+ = +
+ + + − + + + −
Se tiene que
11 3, , 1, 22 2
x y α β= = = =
Sustituyendo los valores anteriores en la ecuación (2.35)
2 2 2 2 2 2 2 2
11 1 3 2 1 22 2 11 32 ( 1) 2 2 ( 1) 2 ( 1) 2 ( 1) 2
s ss s s s
+ +⎛ ⎞ ⎛ ⎞+ = +⎜ ⎟ ⎜ ⎟+ + + + + + + +⎝ ⎠ ⎝ ⎠
Se encuentra que la transformada inversa de Laplace de ( )F s es:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ]1 12 2 2 2
1 1 12 2 2 2
1 1 2( ) ( ) 11 3( 1) 2 ( 1) 2
1 1 2( ) 11 3( 1) 2 ( 1) 2
( ) 1 11 cos 2 3 sin 2t t
sf t F ss s s
sf ts s s
f t e t e t
− −
− − −
− −
⎡ ⎤+= = − + +⎢ ⎥+ + + +⎣ ⎦
⎡ ⎤ ⎡ ⎤+⎡ ⎤= − + +⎢ ⎥ ⎢ ⎥⎢ ⎥ + + + +⎣ ⎦ ⎣ ⎦ ⎣ ⎦= − + +
L L
L L L
1.3. Raíces Múltiples Suponga que ( )F s tiene la forma
0 1
( ) ( )( )( ) ( ) ( )n
B s B sF sA s s s D s
= =+
(2.36)
Donde 0s− no es una raíz de 1( )D s y en general es compleja. Entonces se puede escribir ( )F s como
11 212 1
0 0 0 0
( ) ( )( ) ( ) ( )
n nn n
K KK KF s F ss s s s s s s s
−−= + + + + +
+ + + + (2.37)
Multiplicando los dos miembros de esta ecuación por 0( )ns s+ se tiene como resultado:
1 20 1 0 2 0 1 0 0 1( ) ( ) ( ) ( ) ( ) ( ) ( )n n n n
n ns s F s K s s K s s K s s K s s F s− −−+ = + + + + + + + + +
Haciendo 0s s= − , se obtiene
00( ) ( )n
n s sK s s F s
=−= +
Para encontrar 1nK − , después de la multiplicación se derivan ambos miembros de la ecuación con respecto a s . Entonces

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
2 30 1 0 2 0
112 0 1 0 0
( ) ( ) ( 1) ( ) ( 2) ( )
( )2 ( ) 0 ( ) ( ) ( )
n n n
n nn n
d s s F s n K s s n K s sds
dF sK s s K s s n s s F sds
− −
−− −
⎡ ⎤+ = − + + − + +⎣ ⎦
+ + + + + + + +
Haciendo 0s s= − en esta ecuación, se obtiene
01 0( ) ( )n
n s s
dK s s F sds− =−
⎡ ⎤= +⎣ ⎦ (2.38)
Repitiendo el proceso,
0
2
2 022 ( ) ( )nn s s
dK s s F sds− =−
⎡ ⎤= +⎣ ⎦
Por lo que,
0
2
2 02
1 ( ) ( )2
nn s s
dK s s F sds− =−
⎡ ⎤= +⎣ ⎦
En general,
00
1 ( ) ( ) 1,2,3,..., 1!
para r
nn r r s s
dK s s F s r nr ds− =−
⎡ ⎤= + = −⎣ ⎦ (2.39)
Ejemplo 2.17 Hallar la transformada inversa de Laplace para la función:
3
2( )( 1)sF s
s s−
=+
Solución:
( )F s tiene el siguiente desarrollo en fracciones parciales
3 2 3
2( )( 1) 1 ( 1) ( 1)s A B C DF s
s s s s s s−
= = + + ++ + + +

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Donde
[ ] 3 3 300 0
2 2 (0) 2( ) 2( 1) ( 1) (0 1)s
s s
s sA sF s ss s s=
= =
⎡ ⎤ ⎡ ⎤− − −= = = = = −⎢ ⎥ ⎢ ⎥+ + +⎣ ⎦ ⎣ ⎦
0
3 30 31
11
1 2 2 1 2( 1) ( ) ( 1) 30! ( 1) 1s
ss
d s sD s F s sds s s s=−
=−=−
⎡ ⎤− − − −⎡ ⎤⎡ ⎤= + = + = = =⎢ ⎥⎣ ⎦ ⎢ ⎥+ −⎣ ⎦⎣ ⎦
1 1 1
3 31 1 3 1 21
111
1 2 2 2( 1) ( ) ( 1) 21! ( 1)s
sss
d d s d sC s F s sds ds s s ds s s=−
=−=−=−
⎡ ⎤− −⎡ ⎤⎡ ⎤= + = + = = =⎢ ⎥⎣ ⎦ ⎢ ⎥+ ⎣ ⎦⎣ ⎦
2 2 2
3 32 2 3 2 31
111
1 1 2 1 2 2( 1) ( ) ( 1) 22! 2 ( 1) 2s
sss
d d s d sB s F s sds ds s s ds s s=−
=−=−=−
⎡ ⎤− −⎡ ⎤⎡ ⎤= + = + = = − =⎢ ⎥⎣ ⎦ ⎢ ⎥+ ⎣ ⎦⎣ ⎦ Así,
2 3
2 2 2 3( )1 ( 1) ( 1)
F ss s s s
= − + + ++ + +
Utilizando una tabla de transformadas de Laplace se encuentra que
23( ) 2 2 22
t t tf t e te t e− − −= − + + +
2. SOLUCIÓN DE ECUACIONES DIFERENCIALES La transformada de Laplace se puede aplicar a un gran número de problemas de análisis y diseño de sistemas, entre ellos los sistemas de control. Las aplicaciones se basan en el uso de las propiedades de la transformada de Laplace, especialmente las asociadas a la diferenciación, la integración y la convolución. Una de las aplicaciones más comunes es la solución de ecuaciones diferenciales lineales con coeficientes constantes. Como se mencionó anteriormente esas ecuaciones se usan para representar sistemas lineales e invariantes en tiempo continuo (sistemas LTI).

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
El procedimiento es directo y sistemático, y se puede resumir en los siguientes pasos: • Dado un conjunto de condiciones iniciales, tomar la transformada de Laplace
de ambos miembros de la ecuación diferencial para obtener la ecuación algebraica ( )Y s .
• Despejar ( )Y s en la ecuación algebraica. • Tomar la transformada inversa de Laplace para obtener ( )y t . Ejemplo 2.18 Encuentre la solución para la siguiente ecuación diferencial lineal de segundo orden y de coeficientes constantes:
( ) 5 ( ) 6 ( ) ty t y t y t e−+ + = Con condiciones iniciales '(0) 1y = y (0) 2y = . Solución: Aplicando la transformada de Laplace a ambos miembros de la ecuación se obtiene:
[ ]2 1( ) 2 1 5 ( ) 2 6 ( )1
s Y s s sY s Y ss
⎡ ⎤− − + − + =⎣ ⎦ +
Despejando ( )Y s ,
2 1( 5 6) ( ) 2 111
s s Y s ss
+ + = + ++
2 2
2
2 13 12 2 13 12( )( 1)( 5 6) ( 1)( 2)( 3)
s s s sY ss s s s s s
+ + + += =
+ + + + + +

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Aplicando el método de expansión en fracciones parciales se tiene:
22 13 12( )( 1)( 2)( 3) 1 2 3
s s A B CY ss s s s s s
+ += = + +
+ + + + + +
Donde,
[ ]2 2
11 1
2
2 13 12 2 13 12( 1) ( ) ( 1)( 1)( 2)( 3) ( 2)( 3)
2( 1) 13( 1) 12 2 13 12 1( 1 2)( 1 3) (1)(2) 2
ss s
s s s sA s Y s ss s s s s
A
=−=− =−
⎡ ⎤ ⎡ ⎤+ + + += + = + =⎢ ⎥ ⎢ ⎥+ + + + +⎣ ⎦ ⎣ ⎦
− + − + − += = =
− + − +
[ ]2 2
22 2
2
2 13 12 2 13 12( 2) ( ) ( 2)( 1)( 2)( 3) ( 1)( 3)
2( 2) 13( 2) 12 8 26 12 6 6( 2 1)( 2 3) ( 1)(1) 1
ss s
s s s sB s Y s ss s s s s
B
=−=− =−
⎡ ⎤ ⎡ ⎤+ + + += + = + =⎢ ⎥ ⎢ ⎥+ + + + +⎣ ⎦ ⎣ ⎦
− + − + − + −= = = =
− + − + − −
[ ]2 2
33 3
2
2 13 12 2 13 12( 3) ( ) ( 3)( 1)( 2)( 3) ( 1)( 2)
2( 3) 13( 3) 12 18 39 12 9( 3 1)( 3 2) ( 2)( 1) 2
ss s
s s s sC s Y s ss s s s s
C
=−=− =−
⎡ ⎤ ⎡ ⎤+ + + += + = + =⎢ ⎥ ⎢ ⎥+ + + + +⎣ ⎦ ⎣ ⎦
− + − + − += = = −
− + − + − −
Por lo tanto,
22 13 12 1 1 1 9 1( ) (6)( 1)( 2)( 3) 2 1 2 2 3
s sY ss s s s s s
+ + ⎛ ⎞ ⎛ ⎞= = + −⎜ ⎟ ⎜ ⎟+ + + + + +⎝ ⎠ ⎝ ⎠
Ahora se aplica la transformada inversa de Laplace a ( )Y s para hallar ( )y t
1 1 1 2 31 1 1 9 1 1 9( ) 6 62 1 2 2 3 2 2
t t ty t e e es s s
− − − − − −⎡ ⎤ ⎡ ⎤ ⎡ ⎤= + − = + −⎢ ⎥ ⎢ ⎥ ⎢ ⎥+ + +⎣ ⎦ ⎣ ⎦ ⎣ ⎦L L L

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Lección 4: TRANSFORMADA Z 1. DEFINICIÓN DE LA TRANSFORMADA Z El método de la transformada Z es un método operacional muy poderoso cuando se trabaja con sistemas en tiempo discreto. A continuación se definirá la transformada Z de una función del tiempo o de una secuencia de números. Al considerar la transformada Z de una función del tiempo, sólo se toman en cuenta los valores muestreados de ( )x t , esto es, (0), ( ), (2 ),...,x x T x T donde T es el período de muestreo. La transformada Z de una función del tiempo ( )x t , donde t es positivo, o de la secuencia de valores ( )x kT , donde k adopta valores de cero o de enteros positivos y T es el periodo de muestreo, se define mediante la siguiente ecuación:
[ ]0
( ) ( ) ( ) k
kX z x kT x kT z
∞−
=
= =∑Z (2.40)
Para una secuencia de números ( )x k , la transformada Z se define como:
[ ]0
( ) ( ) ( ) k
k
X z x k x k z∞
−
=
= =∑Z (2.41)
En donde z es una variable compleja con parte real e imaginaria. Un significado de las ecuaciones (2.40) y (2.41) es que la transformada Z convierte la secuencia de números en el dominio real a una expresión en el dominio complejo z . Observe que la expansión del segundo miembro de la ecuación (2.40) da como resultado
1 2( ) (0) ( ) (2 ) ( ) kX z x x T z x T z x kT z− − −= + + + + + (2.42)
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
La ecuación (2.42) implica que la transformada Z de cualquier función en tiempo continuo ( )x t se puede escribir, mediante inspección, en la forma de una serie. La
kz− en esta serie indica la posición en el tiempo en la que se presenta la amplitud ( )x kT . De manera contraria, si ( )X z está dada en la forma de una serie como la
que se indicó, la transformada Z inversa se puede obtener por inspección como una secuencia de la función ( )x kT que corresponde a los valores de ( )x t en los valores de tiempo respectivos. Si la transformada Z está dada como el cociente de dos polinomios en z , entonces la transformada Z inversa se puede obtener mediante varios métodos diferentes, tales como: • Método de la división directa. • Método de expansión en fracciones parciales. • Método de los residuos 2. TRANSFORMADA Z DE FUNCIONES ELEMENTALES A continuación, se encontrarán las transformadas Z de algunas funciones que se utilizan con frecuencia. 2.1. Función Delta de Kronecker En sistemas de tiempo discreto, la función delta de Kronecker desempeña el mismo papel que la función delta de Dirac en sistemas de tiempo continuo.
Figure 2.9 Función delta de Kronecker
Puede definirse la función como:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1 0
( ) 0,1,2,...0 0
kx k k
k=⎧
= =⎨ >⎩
para donde
para
Entonces,
[ ]( ) ( ) 1X z x k= =Z 2.2. Función Escalón Unitario La función escalón unitario en tiempo discreto es el resultado del muestreo aplicado a la función escalón unitario en tiempo continuo.
Figure 2.10 Función escalón unitario
La función escalón se puede definir así:
0 0( ) 0,1,2,...
1 0para
donde para
kx k k
k<⎧
= =⎨ ≥⎩
Entonces, refiriéndose a la ecuación (2.41), se tiene
[ ] 1 2 31
0 0
1( ) 1( ) 1 11 1
k k
k k
zX z k z z z z zz z
∞ ∞− − − − −
−= =
= = = = + + + + = =− −∑ ∑Z
2.3. Función Rampa Unitaria La función rampa unitaria en tiempo discreto es el resultado del muestreo aplicado a la función rampa unitaria en tiempo continuo.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 2.11 Función rampa unitaria
La función rampa unitaria está dada por:
0 0( ) 0,1,2,...
0para
donde para
kx kT k
kT k<⎧
= =⎨ ≥⎩
Entonces, refiriéndose a la ecuación (2.40), se tiene
[ ]1
1 2 31 2 2
0 0
( ) ( 2 3 )(1 ) ( 1)
k k
k k
z TzX z kT kTz T kz T z z z Tz z
−∞ ∞− − − − −
−= =
= = = = + + + = =− −∑ ∑Z
2.4. Función Polinomial
Figure 2.12 Función polinomial
Considere la función definida como

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
0 0( ) 0,1,2,...
0para
donde para k
kx k k
a k<⎧
= =⎨ ≥⎩
Donde a es una constante. Con referencia a la definición de transformada Z dada por la ecuación (2.41), se obtiene:
1 2 2 3 3
0
1
( ) 1
1( )1
k k k
kX z a a z az a z a z
zX zaz z a
∞− − − −
=
−
⎡ ⎤= = = + + + +⎣ ⎦
= =− −
∑Z
2.5. Función Exponencial
Figure 2.13 Función exponencial
Sea la función exponencial
0 0( ) 0,1,2,...
0para
donde para akT
kx kT k
e k−
<⎧= =⎨ ≥⎩
De acuerdo a la ecuación (2.40), se tiene
1 2 2 3 3
0
1
( ) 1
1( )1
akT akT k aT aT aT
k
aT aT
X z e e z e z e z e z
zX ze z z e
∞− − − − − − − − −
=
− − −
⎡ ⎤= = = + + + +⎣ ⎦
= =− −
∑Z

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
2.6. Función Senoidal
Figure 2.14 Función senoidal
Considere la función senoidal
0 0( ) 0,1,2,...
sin 0para
donde para
kx kT k
kT kω<⎧
= =⎨ ≥⎩
Recordando que
cos sinj te t j tω ω ω= + cos sinj te t j tω ω ω− = −
Se tiene,
1sin ( )2
j kT j kTkT e ej
ω ωω −= −
Como la transformada Z de la función exponencial es:
akTaT
zez e
−−
⎡ ⎤ =⎣ ⎦ −Z
Se encuentra que,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ]
2 2
1 1( ) sin ( )2 2
1 ( ) sin( )2 ( ) 1 2 cos 1
j kT j kTj T j T
j T j T
j T j T
z zX z kT e ej j z e z e
e e z z TX zj z e e z z z T
ω ωω ω
ω ω
ω ω
ω
ωω
−−
−
−
⎡ ⎤ ⎛ ⎞= = − = −⎜ ⎟⎢ ⎥ − −⎝ ⎠⎣ ⎦⎛ ⎞−
= =⎜ ⎟− + + − +⎝ ⎠
Z Z
Del mismo modo, se puede verificar que la transformada Z de cos kTω es:
[ ]2
2
cos( ) cos2 cos 1
z z TX z kTz z T
ωωω
−= =
− +Z
El estudiante puede realizar la comprobación de esta última ecuación, como un ejercicio complementario que le permita afianzar los conocimientos adquiridos hasta el momento. De la misma forma como se trabaja con la transformada de Laplace, la tabla 2.3 de transformadas Z de las funciones comúnmente encontradas es muy útil en la resolución de problemas en el campo de los sistemas en tiempo discreto.
Table 2.3 Pares de transformadas Z ( )x kT o ( )x k ( )X z 1 Delta de Kronecker ( )kδ 1 2 ( )n kδ − kz−
3 1( )k 1
zz −
4 akTe− aT
zz e−−
5 kT 2( 1)Tz
z −
6 2( )kT 2
3
( 1)( 1)
T z zz
+−
7 3( )kT 3 2
4
( 4 1)( 1)
T z z zz+ +−
8 1 akTe−− (1 )
( 1)( )
aT
aT
e zz z e
−
−
−− −

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Table 2.3 Pares de transformadas Z (continuación)
9 akT bkTe e− −− ( )
( )( )
aT bT
aT bT
e e zz e z e
− −
− −
−− −
10 akTkTe− 2( )
aT
aT
Te zz e
−
−−
11 (1 ) akTakT e−− 2
2
(1 )( )
aT
aT
z aT e zz e
−
−
− +−
12 2( ) akTkT e− 2
3
( )( )
aT aT
aT
T e z e zz e
− −
−
+−
13 1 akTakT e−− + 2
( 1 ) (1 )( 1) ( )
aT aT aT
aT
aT e z e aTe zz z e
− − −
−
⎡ ⎤− + + − −⎣ ⎦− −
14 sin kTω 2
sin2 cos 1z T
z z Tωω− +
15 cos kTω 2
2
cos2 cos 1
z z Tz z T
ωω
−− +
16 sinakTe kTω− 2 2
sin2 cos
aT
aT aT
e z Tz e z T e
ωω
−
− −− +
17 cosakTe kTω− 2
2 2
cos2 cos
aT
aT aT
z e z Tz e z T e
ωω
−
− −
−− +
18 ka z
z a−
19 1ka − 1
z a−
20 1kka − 2( )z
z a−
21 2 1kk a − 3
( )( )z z az a+−
22 3 1kk a − 2 2
4
( 4 )( )
z z az az a+ +−
23 4 1kk a − 3 2 2 3
5
( 11 11 )( )
z z az a z az a
+ + +−
24 coska kπ z
z a+
25 ( 1)
2!k k − 3( 1)
zz −

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Table 2.3 Pares de transformadas Z (continuación)
26 ( 1) ( 2)
( 1)!k k k m
m− − +
−
( 1)m
zz −
27 2( 1)2!
kk k a −− 3( )z
z a−
28 ( 1) ( 2)
( 1)!k k k m
m− − +
−
( )m
zz a−
29 sink kTω 2
2 2
( sin sin )( 2 cos 1)z z T Tz z T
ω ωω−
− +
30 cosk kTω 2
2 2
( cos 2 cos )( 2 cos 1)
z z T z Tz z T
ω ωω
− +− +
31 sinakTke kTω− 2 2
2 2 2
( sin sin )( 2 cos )
aT aT
aT aT
ze z T e Tz ze T e
ω ωω
− −
− −
−− +
32 cosakTke kTω− 2 2
2 2
( cos 2 cos )( 2 cos 1)
aT aT aT
aT
ze z T ze e Tz ze T
ω ωω
− − −
−
− +− +
3. PROPIEDADES Y TEOREMAS DE LA TRANSFORMADA Z Las aplicaciones de la transformada Z , en muchos casos se simplifican al emplear las propiedades de la transformada. 3.1. Multiplicación por una Constante Sea a una constante y ( )X z la transformada Z de ( )x kT , entonces:
[ ] [ ]( ) ( ) ( )ax kT a x kT aX z= =Z Z (2.43) 3.2. Linealidad Sean 1( )X z y 2 ( )X z las transformadas Z de 1( )x kT y 2 ( )x kT , respectivamente, entonces:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ] [ ] [ ]1 2 1 2 1 2( ) ( ) ( ) ( ) ( ) ( )x kT x kT x kT x kT X z X z± = ± = ±Z Z Z (2.44) Ejemplo 2.19 Encuentre la transformada Z de la función ( ) 2 3sin 5x kT kT kT= − Solución: Aplicando las propiedades de multiplicación por una constante y de linealidad, se tiene:
[ ] [ ] [ ] 2 2
sin 52 3sin 5 2 3 sin 5 2 3( 1) 2 cos5 1
Tz z TkT kT kT kTz z z T
⎛ ⎞ ⎛ ⎞− = − = −⎜ ⎟ ⎜ ⎟− − +⎝ ⎠⎝ ⎠Z Z Z
3.3. Multiplicación por ka La transformada Z de ( )x kT multiplicada por ka , donde a es una constante, es igual a la transformada Z ( )X z , con z reemplazada por z a , esto es:
[ ]( ) ( )kz z a
za x kT x kT Xa=
⎛ ⎞⎡ ⎤ = = ⎜ ⎟⎣ ⎦ ⎝ ⎠Z Z (2.45)
Ejemplo 2.20 Encuentre la transformada Z de la función ( ) 2kx kT kT= Solución: Aplicando la propiedad anterior, la transformada Z se puede hallar así:
[ ] 2 222
22( 1) ( 2)
kz z
z z
Tz TzkT kTz z=
=
⎡ ⎤⎡ ⎤ = = =⎢ ⎥⎣ ⎦ − −⎣ ⎦
Z Z

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
3.4. Traslación Compleja La transformada Z de ( )x kT multiplicada por akTe∓ , donde a es una constante, es igual a la transformada Z ( ( )X z ), con z reemplazada por aTze± , esto es:
[ ]( ) ( ) ( )aTakT aT
z zee x kT x kT X ze±
±
=⎡ ⎤ = =⎣ ⎦Z Z∓ (2.46)
Ejemplo 2.21 Encuentre la transformada Z de 5( ) kTx kT e kT−= Solución: Aplicando la propiedad de traslación compleja se encuentra que su transformada Z es:
[ ] 55
5 55
2 5 2 5 2( 1) ( 1) ( )TT
T TkT
T Tz zez ze
Tz Tze Tzee kT kTz ze z e
−−
−==
⎡ ⎤ = = = =⎣ ⎦ − − −Z Z
3.5. Traslación Real La transformada Z de ( )x kT retrasada un tiempo n , es igual a la transformada Z de ( )x kT multiplicada por nz− , esto es:
[ ] [ ]( ) ( ) ( )n nx kT n z x kT z X z− −− = =Z Z (2.47) De igual forma la transformada Z de ( )x kT adelantada un tiempo n , se puede representar de la siguiente forma:
[ ] [ ]1 1
0 0
( ) ( ) ( ) ( ) ( )n n
n k n k
k k
x kT n z x kT x kT z z X z x kT z− −
− −
= =
⎧ ⎫ ⎡ ⎤+ = − = −⎨ ⎬ ⎢ ⎥⎩ ⎭ ⎣ ⎦∑ ∑Z Z (2.48)
Ejemplo 2.22 Encuentre la transformada Z de la función 2( ) ( 3)x kT kT= −

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Solución: Aplicando la propiedad de traslación real se encuentra que su transformada Z es entonces:
2 22 3 2 3
3 2 3
( 1) ( 1)( 3) ( )( 1) ( 1)
T z z T zkT z kT zz z z
− − ⎛ ⎞+ +⎡ ⎤ ⎡ ⎤− = = =⎜ ⎟⎣ ⎦ ⎣ ⎦ − −⎝ ⎠Z Z
3.6. Suma de Funciones Sea la función:
0
( ) ( ) para 0,1,2,...k
h
y k x h k=
= =∑
Desarrollando la función se obtiene que
( ) (0) (1) (2) ( 1) ( )( 1) (0) (1) (2) ( 1)
y k x x x x k x ky k x x x x k
= + + + + − +− = + + + + −
Restando estas dos expresiones se tiene
( ) ( 1) ( )y k y k x k− − = Sacando la transformada Z ,
1( ) ( ) ( )Y z z Y z X z−− = Entonces, despejando ( )Y z , se tiene que:
1
1( ) ( ) ( )1 1
zY z X z X zz z−= =
− − (2.49)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
3.7. Teorema del Valor Inicial Si la transformada Z de ( )x k es ( )X z , entonces:
0lim ( ) lim ( )k z
x k X z→ →∞
= (2.50)
3.8. Teorema del Valor Final Si la transformada Z de ( )x k es ( )X z , y si ( )X z es analítica sobre o fuera del círculo unitario 1z = en el plano z , entonces:
1lim ( ) lim( 1) ( )k z
x k z X z→∞ →
= − (2.51)
Este teorema es de gran utilidad siempre y cuando ( 1) ( )z X z− no tenga polos sobre o fuera del círculo unitario 1z = en el plano z . Ejemplo 2.23 Encuentre el valor hacia el cual tiende la siguiente función cuando k →∞
2( )1
zF sz
=−
Solución: Debido a que ( 1) ( )z X z− es analítica sobre el círculo unitario y fuera de él en el plano z , el teorema del valor final puede ser aplicado. Utilizando la ecuación (2.51), se tiene:
1 1lim ( ) lim( 1) ( ) lim 2 2k z z
x k z X z z→∞ → →
= − = =
La tabla 2.4 resume las propiedades y teoremas de la transformada Z .

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Table 2.4 Propiedades de la transformada Z 1 [ ]( ) ( )ax k aX z=Z
2 [ ]1 2 1 2( ) ( ) ( ) ( )x k x k X z X z± = ±Z
3 [ ]( 1) ( ) (0)x k zX z zx+ = −Z
4 [ ] 2 2( 2) ( ) (0) (1)x k z X z z x zx+ = − −Z
5 [ ] 1( ) ( ) (0) (1) ( 1)n n nx k n z X z z x z x zx n−+ = − − − − −Z
6 [ ]( ) ( )nx k n z X z−− =Z
7 [ ]( ) ( )dkx k z X zdz
= −Z
8 ( ) ( )ak ae x k X ze±⎡ ⎤ =⎣ ⎦Z ∓
9 ( )k za x k Xa
⎛ ⎞⎡ ⎤ = ⎜ ⎟⎣ ⎦ ⎝ ⎠Z
10 ( )k d zka x k z Xdz a
⎛ ⎞⎡ ⎤ = − ⎜ ⎟⎣ ⎦ ⎝ ⎠Z
11 (0) lim ( )z
x X z→∞
=
12 1( ) lim( 1) ( )
zx z X z
→∞ = −
13 [ ]( ) ( 1) ( 1) ( )x k x k z X z− − = −Z
14 [ ]( 1) ( ) ( 1) ( ) (0)x k x k z X z zx+ − = − −Z
15 0
( ) ( )1
n
k
zx k X zz=
⎡ ⎤ =⎢ ⎥ −⎣ ⎦∑Z
16 ( ) ( )n
n dk x k z X zdz
⎛ ⎞⎡ ⎤ = −⎜ ⎟⎣ ⎦ ⎝ ⎠Z
17 0
( ) ( ) ( ) ( )n
k
x k y n k X z Y z=
⎡ ⎤− =⎢ ⎥⎣ ⎦∑Z
Lección 5: TRANSFORMADA Z INVERSA La transformada Z en sistemas de control en tiempo discreto juega el mismo papel que la transformada de Laplace en sistemas de control en tiempo continuo. Para que la transformada Z sea útil, hay que familiarizarse con los métodos para encontrar la transformada Z inversa.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
La notación para la transformada Z inversa es 1−Z . La transformada Z inversa de ( )X z da como resultado la correspondiente secuencia de tiempo. Se debe observar que a partir de la transformada Z inversa sólo se obtiene la secuencia de tiempo en los instantes de muestreo. De esta manera, la transformada Z inversa de ( )X z da como resultado una única ( )x k , pero no da una única ( )x t . Esto significa que la transformada Z inversa da como resultado una secuencia de tiempo que especifica los valores de ( )x t solamente en los valores discretos de tiempo, 0, , 2 ,...,t T T= y no dice nada acerca de los valores de
( )x t en todos los otros tiempos. Es decir, que muchas funciones del tiempo ( )x t diferentes pueden tener la misma ( )x k .
Figure 2.15 Funciones en tiempo continuo con los mismos valores en 0, , 2 ,...t T T= Un método obvio para encontrar la transformada Z inversa es referirse a una tabla de transformadas Z . Sin embargo, a menos que se refiera a una tabla de transformadas Z muy extensa, no seria capaz de encontrar la transformada Z inversa de una función de z complicada.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Existen otros métodos para obtener la transformada Z inversa que no implican el uso de tablas: • Método de la división directa. • Método de expansión en fracciones parciales. • Método de los residuos. 1. MÉTODO DE DIVISIÓN DIRECTA En el método de la división directa, la transformada Z inversa se obtiene mediante la expansión de ( )X z en una serie infinita de potencias de 1z− . Este método es útil cuando es difícil obtener una expresión en forma cerrada para la transformada Z inversa o se desea encontrar solo algunos de los primeros términos de ( )x k . El método de la división directa proviene del hecho de que si
( )X z está expandida en una serie de potencias de 1z− , esto es, si
1 2
0( ) ( ) (0) (1) (2) ( )k k
kX z x k z x x z x z x k z
∞− − − −
=
= = + + + +∑
Entonces ( )x k es el coeficiente del término kz− . Por lo tanto, los valores de ( )x k para 0,1,2,...k = se pueden determinar por inspección. Si ( )X z está dada en la forma de una función racional, la expansión en una serie de potencias infinita en potencias crecientes de 1z− se puede lograr sencillamente al dividir el numerador entre el denominador, donde tanto el numerador como el denominador de ( )X z se escriben en potencias crecientes de 1z− . Ejemplo 2.24 Encuentre ( )x k cuando ( )X z está dada por la expresión:
1
1
1( )1 1
zX zz z
−
−= =+ +

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Solución: Al dividir el numerador entre el denominador, se obtiene
1 2 3 4
1 1
1 2
2
2 3
3
3 4
4
4 5
5
1z z z z
z zz z
zz z
zz z
zz z
z
− − − −
− −
− −
−
− −
−
− −
−
− −
−
− + − ++
+
−
− −
+
−
− −
De este modo,
1 2 3 4( )X z z z z z− − − −= − + − + Al comparar esta expansión de ( )X z se tiene,
(0) 0(1) 1(2) 1(3) 1(4) 1
xxxxx
=== −== −
Esta es una señal alternante entre 1− y 1, que empieza en 1k = . Como se ve a partir de este ejemplo, el método de la división directa se puede llevar a cabo mediante cálculos manuales si sólo se desean los primeros términos

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
de la secuencia. En general, el método no produce una expresión en forma cerrada para ( )x k , excepto en casos especiales. 2. MÉTODO DE FRACCIONES PARCIALES El método de expansión en fracciones parciales que se presenta aquí y que es idéntico al método de expansión en fracciones parciales que se utiliza en la transformada de Laplace, es muy empleado en problemas rutinarios que involucran transformadas Z . El método requiere que todos los términos de la expansión en fracciones parciales se puedan reconocer fácilmente en la tabla de pares de transformadas Z . Para encontrar la transformada Z inversa, si ( )X z tiene uno o más ceros en el origen ( 0z = ), entonces ( )X z z se expande en la suma de términos sencillos de primero o segundo orden mediante la expansión en fracciones parciales y se emplea una tabla de transformadas Z para encontrar la función del tiempo correspondiente para cada uno de los términos expandidos. Se debe observar que la única razón de que se expanda ( )X z z en fracciones parciales es que cada uno de los términos expandidos tenga una forma que se pueda encontrar fácilmente a partir de las tablas de transformadas ( )X z z de que se dispone comúnmente. El proceso de efectuar un desarrollo en fracciones parciales se analizará en tres casos. En cada uno se supondrá que
10 1 1
11 1
( ) donde m m
m mn n
n n
b z b z b z bX z n mz a z a z a
−−
−−
+ + + += ≥
+ + + + (2.52)
Para expandir ( )X z en fracciones parciales, primero se factoriza el polinomio del denominador y se encuentran los polos de ( )X z :
10 1 1
1 2
( )( )( ) ( )
m mm m
n
b z b z b z bX zz p z p z p
−−+ + + +
=− − −
(2.53)
Luego se expande ( )X z z en fracciones parciales, de manera que cada uno de los términos sea reconocido fácilmente en una tabla de transformadas Z . La
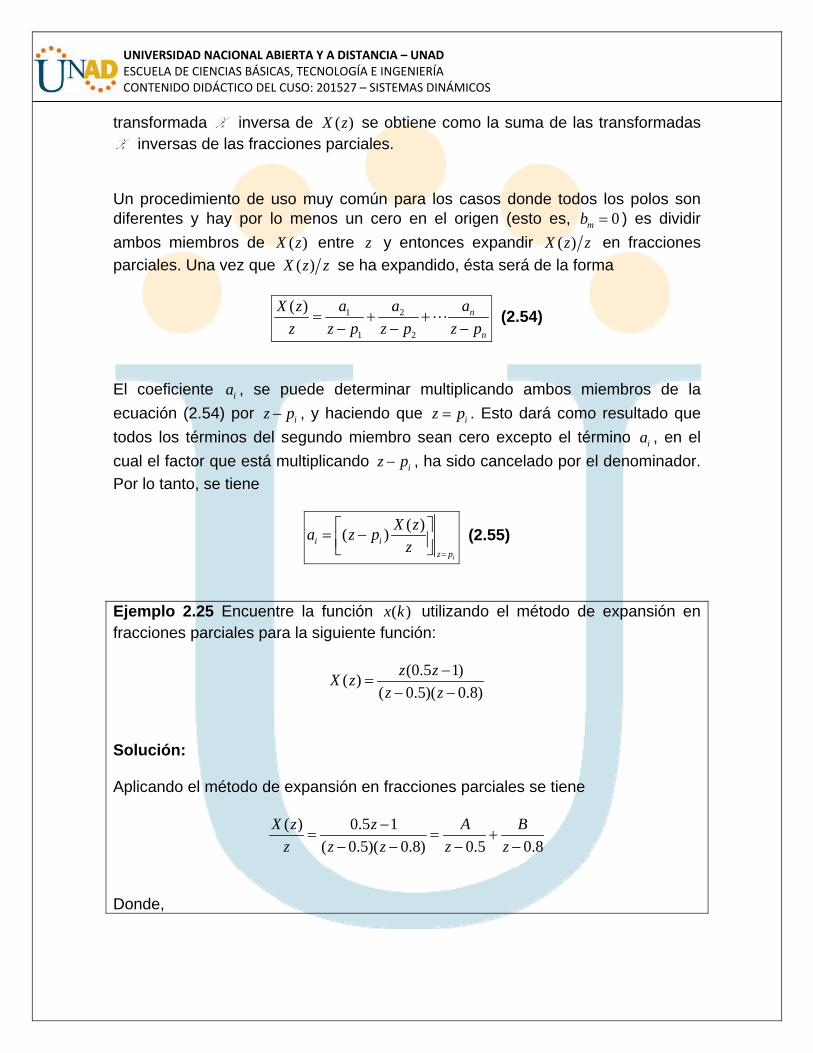
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
transformada Z inversa de ( )X z se obtiene como la suma de las transformadas Z inversas de las fracciones parciales. Un procedimiento de uso muy común para los casos donde todos los polos son diferentes y hay por lo menos un cero en el origen (esto es, 0mb = ) es dividir ambos miembros de ( )X z entre z y entonces expandir ( )X z z en fracciones parciales. Una vez que ( )X z z se ha expandido, ésta será de la forma
1 2
1 2
( ) n
n
aa aX zz z p z p z p
= + +− − −
(2.54)
El coeficiente ia , se puede determinar multiplicando ambos miembros de la ecuación (2.54) por iz p− , y haciendo que iz p= . Esto dará como resultado que todos los términos del segundo miembro sean cero excepto el término ia , en el cual el factor que está multiplicando iz p− , ha sido cancelado por el denominador. Por lo tanto, se tiene
( )( )i
i iz p
X za z pz =
⎡ ⎤= −⎢ ⎥⎣ ⎦ (2.55)
Ejemplo 2.25 Encuentre la función ( )x k utilizando el método de expansión en fracciones parciales para la siguiente función:
(0.5 1)( )( 0.5)( 0.8)
z zX zz z
−=
− −
Solución: Aplicando el método de expansión en fracciones parciales se tiene
( ) 0.5 1( 0.5)( 0.8) 0.5 0.8
X z z A Bz z z z z
−= = +
− − − −
Donde,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
0.5 0.50.5
( ) 0.5 1 0.5 1( 0.5) ( 0.5)( 0.5)( 0.8) 0.8
(0.5)(0.5) 1 0.25 1 0.75 50.5 0.8 0.3 0.3 2
z zz
X z z zA z zz z z z
A
= ==
⎡ ⎤− −⎡ ⎤ ⎡ ⎤= − = − =⎢ ⎥⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦⎣ ⎦− − −
= = = =− − −
0.8 0.80.8
( ) 0.5 1 0.5 1( 0.8) ( 0.8)( 0.5)( 0.8) 0.5
(0.5)(0.8) 1 0.4 1 0.6 20.8 0.5 0.3 0.3
z zz
X z z zB z zz z z z
B
= ==
⎡ ⎤− −⎡ ⎤ ⎡ ⎤= − = − =⎢ ⎥⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦⎣ ⎦− − −
= = = = −−
Por lo tanto,
( ) 0.5 1 5 2 2( 0.5)( 0.8) 0.5 0.8
X z zz z z z z
− −= = +
− − − −
Entonces,
5( ) (2)2 0.5 0.8
z zX zz z
⎛ ⎞= −⎜ ⎟ − −⎝ ⎠
Ahora se aplica la transformada Z inversa a ( )X z para hallar ( )x k
1 15 5( ) 2 (0.5) 2(0.8)2 0.5 0.8 2
k kz zx kz z
− −⎡ ⎤ ⎡ ⎤= − = −⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦Z Z
Observe que dicha forma para determinar ia es válida sólo para polos simples. Si ( )X z z involucra un polo múltiple, por ejemplo, un polo doble en iz p= , y no tiene más polos, entonces ( )X z z tendrá la forma
1 22
1 1
( )( )
a aX zz z p z p
= +− −
(2.56)
Donde los coeficientes 1a y 2a se determinan a partir de
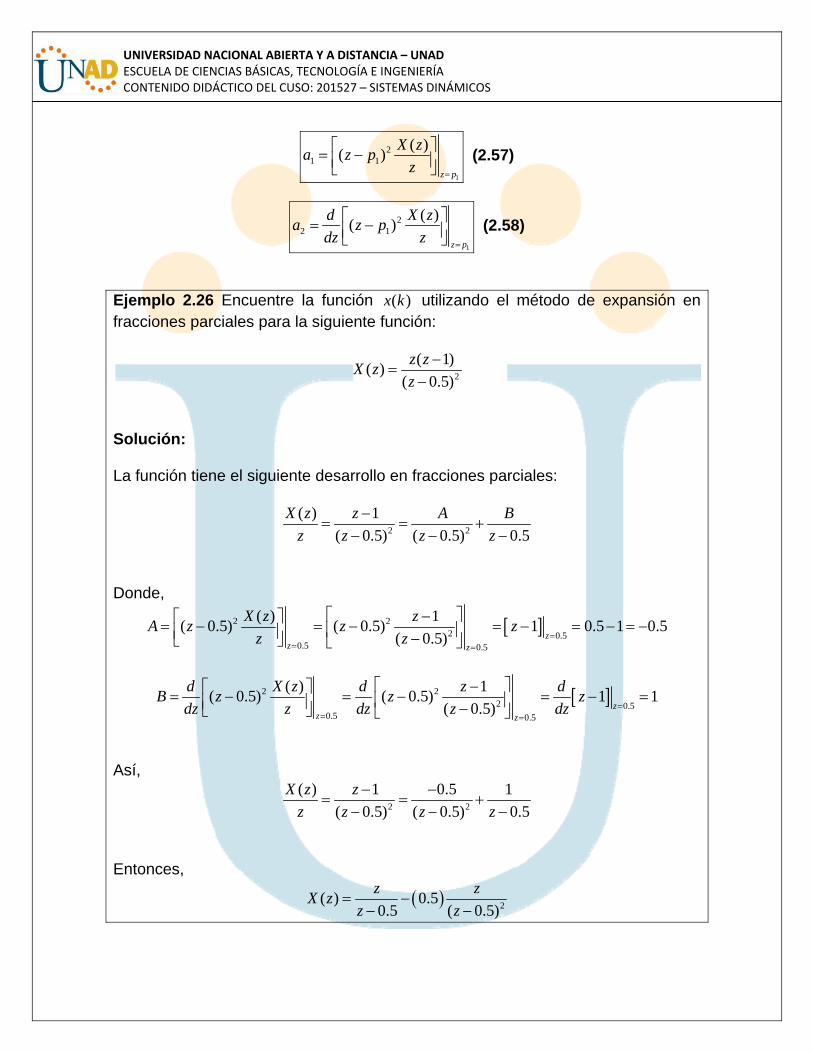
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1
21 1
( )( )z p
X za z pz =
⎡ ⎤= −⎢ ⎥⎣ ⎦ (2.57)
1
22 1
( )( )z p
d X za z pdz z =
⎡ ⎤= −⎢ ⎥⎣ ⎦ (2.58)
Ejemplo 2.26 Encuentre la función ( )x k utilizando el método de expansión en fracciones parciales para la siguiente función:
2
( 1)( )( 0.5)z zX zz
−=
−
Solución: La función tiene el siguiente desarrollo en fracciones parciales:
2 2
( ) 1( 0.5) ( 0.5) 0.5
X z z A Bz z z z
−= = +
− − −
Donde,
[ ]2 22 0.5
0.5 0.5
( ) 1( 0.5) ( 0.5) 1 0.5 1 0.5( 0.5) z
z z
X z zA z z zz z =
= =
⎡ ⎤−⎡ ⎤= − = − = − = − = −⎢ ⎥⎢ ⎥ −⎣ ⎦ ⎣ ⎦
[ ]2 22 0.5
0.5 0.5
( ) 1( 0.5) ( 0.5) 1 1( 0.5) z
z z
d X z d z dB z z zdz z dz z dz =
= =
⎡ ⎤−⎡ ⎤= − = − = − =⎢ ⎥⎢ ⎥ −⎣ ⎦ ⎣ ⎦
Así,
2 2
( ) 1 0.5 1( 0.5) ( 0.5) 0.5
X z zz z z z
− −= = +
− − −
Entonces,
( ) 2( ) 0.50.5 ( 0.5)z zX z
z z= −
− −

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Utilizando una tabla de transformadas Z se encuentra que
1( ) (0.5) 0.5 (0.5) (0.5) (0.5)k k k kx k k k−= − = − Por último, se puede considerar el caso en el que ( )X z z tiene polos complejos conjugados, por lo que la transformada inversa será una función ( )x k que involucra términos de funciones seno y coseno. No olvidar que,
21
1 12 2
12 22 2
cos cos2 cos
sin sin2 cos
aTakT
aT aT
aTakT
aT aT
z e z TA Ae kTz e z T e
e z TA A e kTz e z T e
ω ωω
ω ωω
−− −
− −
−− −
− −
⎡ ⎤−=⎢ ⎥− +⎣ ⎦
⎡ ⎤=⎢ ⎥− +⎣ ⎦
Z
Z
Ejemplo 2.27 Hallar la transformada Z inversa de:
2
( 1)( )1
z zX zz z
−=
+ +
Solución: Inicialmente, se reescribe la función ( )X z como:
2 2
2 2 2 2 2
cos sin( )1 2 cos 2 cos
aT aT
aT aT aT aT
z z z e z T e z TX z A Bz z z e z T e z e z T e
ω ωω ω
− −
− − − −
− −= = +
+ + − + − +
2
2 2
( sin cos )( )2 cos
aT aT
aT aT
Az z Be T Ae TX zz e z T e
ω ωω
− −
− −
+ −=
− +
Donde, al comparar los denominadores se observa que para 2z :
1 1=

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Para z :
1 2 cosaTe Tω−= − Para el término independiente:
21 aTe−= De esta última expresión se obtiene el valor de aT ,
ln(1) 02
aT = =−
Luego,
(0) 1aTe e− = = Por lo que se puede encontrar el valor de Tω ,
1 11cos cos ( 0.5) 2.09442
radaTTe
ω − −−
⎛ ⎞= = − =⎜ ⎟−⎝ ⎠
Ahora se comparar los numeradores
2 2 ( sin cos )aT aTz z Az Az Be T Ae Tω ω− −− = + − De donde se observa que para 2z :
1A = Para z :
1 sin cosaT aTBe T e Tω ω− −− = − Por lo que ,
cos 1 (1)( 0.5) 1 1.5 1.7321sin 1(0.8660) 0.8660
aT
aT
e TBe T
ωω
−
−
− − − −= = = = −

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Sustituyendo los valores para ( )X z :
2 2
2 2 2
cos(2.0944) sin(2.0944)( ) (1.7321)1 2 cos(2.0944) 1 2 cos(2.0944) 1
z z z z zX zz z z z z z
− −= = −
+ + − + − +
Se encuentra que la transformada Z inversa de ( )X z es:
( ) cos(2.0944 ) 1.7321sin(2.0944 )x k k k= − 3. MÉTODO DE LOS RESIDUOS Ésta es una técnica útil para la obtención de la transformada Z inversa. La integral de inversión esta dada por:
[ ]1 11( ) ( ) ( )2
k
CX z x k X z z dz
jπ− −= = ∫Z (2.59)
La ecuación que da la transformada Z inversa en términos de los residuos se puede obtener si se utiliza la teoría de la variable compleja. Ésta se puede obtener como sigue:
1 2( ) mx k K K K= + + + (2.60) Donde 1 2, ,..., mK K K denotan los residuos de 1( ) kX z z − en los polos 1 2, ,... mz z z , respectivamente. Al evaluar los residuos, observe que si el denominador de
1( ) kX z z − contiene un polo simple en iz z= , entonces el residuo K correspondiente esta dado por:
1lim ( ) ( )i
kiz z
K z z X z z −
→⎡ ⎤= −⎣ ⎦ (2.61)
Si 1( ) kX z z − contiene un polo múltiple iz de orden n , entonces el residuo K está dado por:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
11 lim ( ) ( )
( 1)! i
n kiz z
K z z X z zn
−
→⎡ ⎤= −⎣ ⎦−
(2.62)
Debe observarse que el método de la integral de inversión, cuando se evalúa por residuos, es una técnica muy sencilla para obtener la transformada Z inversa, siempre que 1( ) kX z z − , no tenga polos en el origen ( 0z = ). Sin embargo, si
1( ) kX z z − tiene un polo simple o uno múltiple en 0z = , el cálculo se puede tornar tedioso y el método de expansión en fracciones parciales podría ser más sencillo de aplicar. Por otro lado, en ciertos problemas el enfoque de expansión en fracciones parciales puede ser muy laborioso. En esos casos es más conveniente el método de los residuos. Ejemplo 2.28 Encuentre la función ( )x k , utilizando el método de los residuos, para la función:
2
2 2
( 1)( )( 1)z zX zz
−=
+
Solución: Reescribiendo la función se tiene:
2
2 2
( 1)( )( ) ( )
z zX zz j z j
−=
+ −
Donde se aprecia que la función posee dos polos complejos conjugados dobles, los cuales se encuentran ubicados en z j= ± . Entonces empleando el método en cuestión se obtienen dos residuos:
1 2( )x k K K= + Donde,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
2 12 1 2
1 2 2
2 2
1 2 2
2 2
1
1 ( 1)lim ( ) ( ) lim ( )(2 1)! ( ) ( )
( 1)lim lim( ) 2 1
( 2 )( 2 1) ( )(2lim
kk
z j z j
k k k
z j z j
k k k k k
z j
d d z z zK z j X z z z jdz dz z j z j
d z z d z zKdz z j dz z j z
kz z z z kz z z j z z z z z jK
−−
→− →−
+
→− →−
→−
⎡ ⎤−⎡ ⎤= + = +⎢ ⎥⎣ ⎦− + −⎣ ⎦⎡ ⎤ ⎡ ⎤− −
= =⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦
+ − − − − − −= 4 3 2
2)4 6 4 1z j z z j z
⎡ ⎤⎢ ⎥− − + +⎣ ⎦
Al evaluar el límite hay que recordar que j− es un número complejo, el cual puede ser representado por su magnitud y su ángulo, así
2j
j eπ
−− =
Es decir, una magnitud de 1 y un ángulo de 2π− . También hay que tener en cuenta que:
2
3
4
( ) 1( )( ) 1
jj jj
− = −
− =
− =
De esta manera se halla el valor para 1K :
2 2 2
1
2 2
1
2 2 ( 4) 2 ( 4)
16
2 2
j k j k j k
j k j k
j ke j e j e jK
jke keKj
π π π
π π
− − −
− −
⎛ ⎞ ⎛ ⎞− − − − − −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠=
= = −
Ahora se halla 2K :

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
2 12 1 2
2 2 2
2 2
2 2 2
2 2
2 4
1 ( 1)lim ( ) ( ) lim ( )(2 1)! ( ) ( )
( 1)lim lim( ) 2 1
( 2 )( 2 1) ( )(2 2)lim
kk
z j z j
k k k
z j z j
k k k k k
z j
d d z z zK z j X z z z jdz dz z j z j
d z z d z zKdz z j dz z j z
kz z z z kz z z j z z z z z jKz
−−
→ →
+
→ →
→
⎡ ⎤−⎡ ⎤= − = −⎢ ⎥⎣ ⎦− + −⎣ ⎦⎡ ⎤ ⎡ ⎤− −
= =⎢ ⎥ ⎢ ⎥+ + −⎣ ⎦ ⎣ ⎦
+ − + − − − +=
+ 3 24 6 4 1j z z j z⎡ ⎤⎢ ⎥− − +⎣ ⎦
Al evaluar el límite hay que recordar que j también es un número complejo, el cual puede ser representado por su magnitud y su ángulo, así
2j
j eπ
= Es decir, una magnitud de 1 y un ángulo de 2π . También hay que tener en cuenta que:
2
3
4
( ) 1( )( ) 1
jj jj
= −
= −
=
De esta manera se halla el valor para 2K :
2 2 2
2
2 2
1
2 2 ( 4) 2 ( 4)
16
2 2
j k j k j k
j k j k
j ke j e j e jK
jke keKj
π π π
π π
⎛ ⎞ ⎛ ⎞+ − − −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠=
−= =
Con los valores de 1K y 2K se encuentra el valor de ( )x k :
2 2 2 2
1 2( ) sin2 2 2 2
j k j k j k j kke ke e ex k K K k k k
j j j
π π π π
π− −
− ⎛ ⎞= + = − + = = ⎜ ⎟⎝ ⎠

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
4. SOLUCIÓN DE ECUACIONES EN DIFERENCIA Las ecuaciones en diferencias se pueden solucionar fácilmente mediante el uso de una computadora digital, siempre que se proporcionen los valores numéricos de todos los coeficientes y los parámetros. Sin embargo, las expresiones en forma cerrada para ( )x k no se pueden obtener a partir de la solución por computadora, excepto para casos muy especiales. La utilidad del método de la transformada Z es que permite obtener la expresión en forma cerrada para ( )x k . Considere un sistema en tiempo discreto lineal e invariante en el tiempo, caracterizado por la siguiente ecuación en diferencias:
1
0 1
( ) ( 1) ( )( ) ( 1) ( )
n
m
x k a x k a x k nb u k b u k b u k m
+ − + + −= + − + + −
(2.63)
Donde ( )u k y ( )x k son la entrada y la salida del sistema respectivamente. Al escribir dicha ecuación en diferencias en el plano z , se toma la transformada Z de cada uno de los términos de la ecuación. Entonces, ( 1), ( 2). ( 3),...x k x k x k+ + + y ( 1), ( 2). ( 3),...x k x k x k− − − se pueden expresar en términos de ( )X z y de las condiciones iniciales. Las transformadas Z de estas expresiones se resumen en la tabla 2.5.
Table 2.5 Transformadas Z de ( )x k n+ y ( )x k n− ( )x k ( )X z
( 4)x k + 4 4 3 2( ) (0) (1) (2) (3)z X z z x z x z x zx− − − − ( 3)x k + 3 3 2( ) (0) (1) (2)z X z z x z x zx− − − ( 2)x k + 2 2( ) (0) (1)z X z z x zx− − ( 1)x k + ( ) (0)zX z zx−
( )x k ( )X z ( 1)x k − 1 ( )z X z− ( 2)x k − 2 ( )z X z− ( 3)x k − 3 ( )z X z− ( 4)x k − 4 ( )z X z−
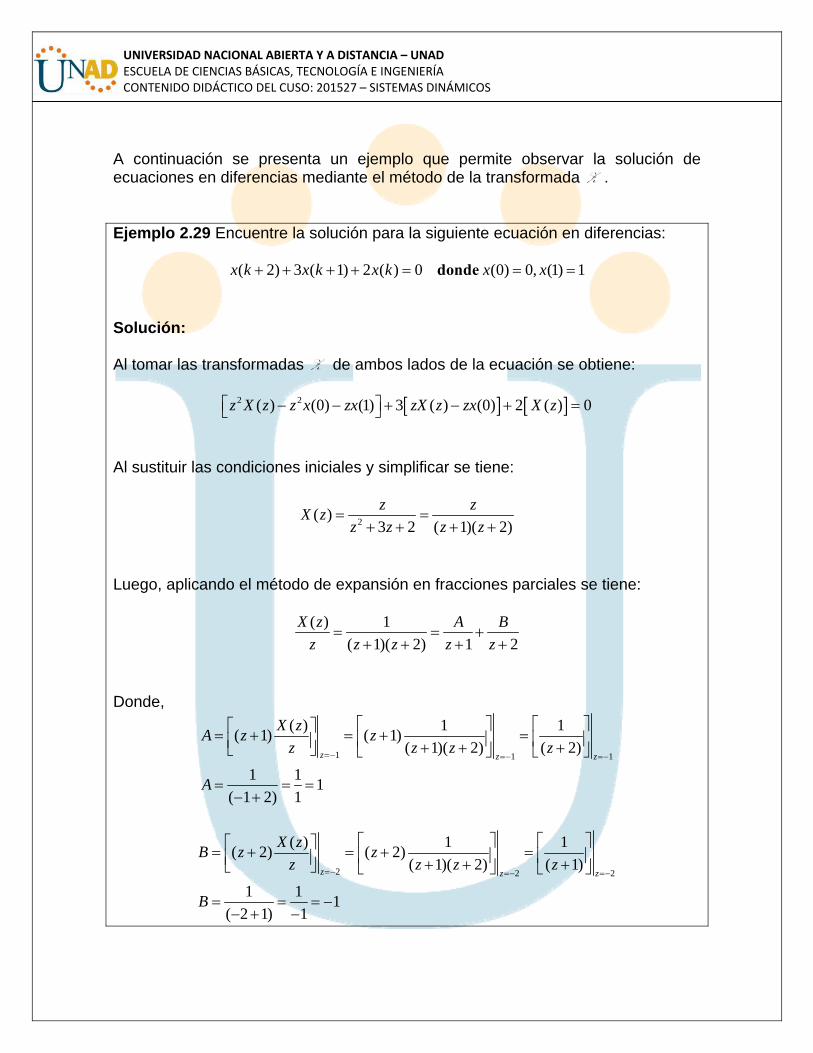
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
A continuación se presenta un ejemplo que permite observar la solución de ecuaciones en diferencias mediante el método de la transformada Z . Ejemplo 2.29 Encuentre la solución para la siguiente ecuación en diferencias:
( 2) 3 ( 1) 2 ( ) 0 (0) 0, (1) 1donde x k x k x k x x+ + + + = = = Solución: Al tomar las transformadas Z de ambos lados de la ecuación se obtiene:
[ ] [ ]2 2( ) (0) (1) 3 ( ) (0) 2 ( ) 0z X z z x zx zX z zx X z⎡ ⎤− − + − + =⎣ ⎦ Al sustituir las condiciones iniciales y simplificar se tiene:
2( )3 2 ( 1)( 2)z zX z
z z z z= =
+ + + +
Luego, aplicando el método de expansión en fracciones parciales se tiene:
( ) 1( 1)( 2) 1 2
X z A Bz z z z z
= = ++ + + +
Donde,
1 1 1
( ) 1 1( 1) ( 1)( 1)( 2) ( 2)
1 1 1( 1 2) 1
z z z
X zA z zz z z z
A
=− =− =−
⎡ ⎤ ⎡ ⎤⎡ ⎤= + = + =⎢ ⎥ ⎢ ⎥⎢ ⎥ + + +⎣ ⎦ ⎣ ⎦ ⎣ ⎦
= = =− +
2 2 2
( ) 1 1( 2) ( 2)( 1)( 2) ( 1)
1 1 1( 2 1) 1
z z z
X zB z zz z z z
B
=− =− =−
⎡ ⎤ ⎡ ⎤⎡ ⎤= + = + =⎢ ⎥ ⎢ ⎥⎢ ⎥ + + +⎣ ⎦ ⎣ ⎦ ⎣ ⎦
= = = −− + −

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Por lo tanto,
( ) 1 1 1( 1)( 2) 1 2
X zz z z z z
= = −+ + + +
Entonces,
( )1 2
z zX zz z
= −+ +
Ahora se aplica la transformada Z inversa a ( )X z para hallar ( )x k
1 1( ) ( 1) ( 2)1 2
k kz zx kz z
− −⎡ ⎤ ⎡ ⎤= − = − − −⎢ ⎥ ⎢ ⎥+ +⎣ ⎦ ⎣ ⎦Z Z
3. CAPITULO 3: MODELADO DE SISTEMAS DINÁMICOS INTRODUCCIÓN Un modelo matemático de un sistema dinámico se define como un conjunto de ecuaciones que representan la dinámica del sistema, este modelo no es único para un sistema determinado ya que el mismo sistema puede representarse en muchas formas diferentes, dependiendo de cada perspectiva. La dinámica de muchos sistemas, ya sean mecánicos, eléctricos, térmicos, económicos, biológicos, etc., se describe en términos de ecuaciones diferenciales, las cuales provienen de las leyes físicas que gobiernan un sistema determinado. Por ejemplo, los sistemas mecánicos se pueden representar mediante las leyes de Newton y los sistemas eléctricos mediante las leyes de Kirchhoff. Obtener un modelo matemático adecuado es la parte más importante de todo el proceso de análisis. Los modelos matemáticos pueden adoptar muchas formas distintas. Por ejemplo, los sistemas lineales invariantes con el tiempo que poseen una entrada y una salida se pueden representar fácilmente mediante la función de transferencia,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
mientras que los sistemas multivariables variantes en el tiempo se representan generalmente, en espacio de estados. En la obtención de un modelo matemático, se debe establecer un equilibrio entre la simplicidad del mismo y la precisión de los resultados del análisis. Al obtener un modelo matemático razonablemente simplificado, a menudo resulta necesario ignorar ciertas propiedades físicas inherentes al sistema. Si los efectos que estas propiedades ignoradas tienen sobre la respuesta son pequeños, se obtendrá un buen acuerdo entre los resultados del análisis de un modelo matemático y los resultados del estudio experimental del sistema físico. En general, cuando se soluciona un problema nuevo, es conveniente desarrollar primero un modelo simplificado para obtener una idea general de la solución y a continuación se desarrolla un modelo matemático más completo que se usa para un análisis más detallado. Si la respuesta producida por un sistema, ante la aplicación simultánea de dos funciones de entradas diferentes es la suma de las dos respuestas individuales, y además son proporcionales la causa y el efecto, el sistema se considera lineal. Los sistemas dinámicos formados por componentes de parámetros concentrados lineales e invariantes con el tiempo se describen mediante ecuaciones diferenciales lineales. Tales sistemas se denominan sistemas lineales invariantes en el tiempo o LTI. Los sistemas que se representan mediante ecuaciones diferenciales cuyos coeficientes son funciones del tiempo, se denominan sistemas lineales variantes con el tiempo. Un ejemplo de un sistema variante en el tiempo es el sistema de control de una nave espacial, ya que la masa de esta cambia debido al consumo de combustible. Por otra parte, para un sistema no lineal la respuesta a dos entradas no puede calcularse tratando cada una a la vez y sumando los resultados. En la práctica, muchos sistemas electromecánicos, hidráulicos, neumáticos, etc., involucran relaciones no lineales entre las variables. Por ejemplo, la salida de un componente puede saturarse para señales de entrada grandes (figura 3.1). Puede haber una zona muerta que afecte las señales pequeñas (figura 3.2). Puede ocurrir una no linealidad de ley cuadrática en algunos componentes (figura 3.3). Por ejemplo, los amortiguadores que se utilizan en los sistemas físicos pueden ser lineales para operaciones a baja velocidad, pero pueden volverse no lineales a altas velocidades.
co01802286
Resaltado

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 3.1 No linealidad de saturación
Figure 3.2 No linealidad de zona muerta
Figure 3.3 No linealidad de ley cuadrática
En general, los procedimientos para encontrar las soluciones a problemas que involucran sistemas no lineales son muy complicados. Por lo que resulta necesario introducir sistemas lineales “equivalentes” en lugar de los no lineales. Tales sistemas lineales equivalentes sólo son válidos para un rango limitado de operación. Una vez que se aproxima un sistema no lineal mediante un modelo matemático lineal, pueden aplicarse varias herramientas lineales para su análisis. En la ingeniería de control, una operación normal del sistema puede ocurrir alrededor de un punto de equilibrio, y las señales pueden considerarse señales pequeñas alrededor del equilibrio. Sin embargo, si el sistema opera alrededor de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
un punto de equilibrio y si las señales involucradas son pequeñas, es posible aproximar el sistema no lineal mediante un sistema lineal. Tal sistema lineal es equivalente al sistema no lineal, considerado dentro de un rango de operación limitado. Ese modelo linealizado es muy importante en la ingeniería de control. Lección 1: SISTEMAS FÍSICOS Y MODELOS 1. SISTEMAS ELÉCTRICOS Las leyes fundamentales que gobiernan los circuitos eléctricos son las leyes de corrientes y voltajes de Kirchhoff. La ley de corrientes de Kirchhoff (la ley de nodos) plantea que la suma algebraica de todas las corrientes que entran y salen de un nodo es cero. La ley de voltajes de Kirchhoff (la ley de mallas) establece que en cualquier instante determinado la suma algebraica de los voltajes alrededor de cualquier malla en un circuito eléctrico es cero. Un modelo matemático de un circuito eléctrico se obtiene aplicando una o ambas leyes de Kirchhoff. Esta sección presenta una serie de ejemplos que permiten modelar matemáticamente sistemas eléctricos sencillos, es decir, sistemas que involucran resistencias, condensadores y bobinas. Ejemplo 3.1 Encuentre un modelo matemático que relacione la tensión de entrada
( )ie t con la corriente de salida ( )oi t , para el circuito eléctrico RL en serie de la figura:
Figure 3.4 Circuito RL en serie
Solución: Si se desea relacionar la tensión de entrada ( )ie t con la corriente de salida ( )oi t , se puede aplicar la ley de voltajes de Kirchhoff a la malla, así:
( ) ( ) ( )i R Le t e t e t= +

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Donde ( )Re t corresponde al voltaje sobre la resistencia y ( )Le t es la caída de voltaje en la bobina, de esta manera se puede escribir la ecuación diferencial que relaciona ( )ie t con ( )oi t :
( )( ) ( ) oi o
di te t Ri t Ldt
= +
Reescribiendo esta última ecuación se tiene una ecuación diferencial de primer orden:
( ) 1( ) ( )oo i
di t R i t e tdt L L
+ =
Ejemplo 3.2 Encuentre un modelo matemático que relacione el voltaje de entrada
( )ie t con el voltaje de salida ( )oe t , para el circuito eléctrico RC en serie de la figura:
Figure 3.5 Circuito RC en serie
Solución: El parámetro de entrada en este caso es el voltaje ( )ie t , y el parámetro de salida es el voltaje sobre el condensador ( )oe t , como se trata de un circuito en serie, se puede aplicar la ley de voltajes de Kirchhoff para la malla de esta forma:
( ) ( ) ( )i R Ce t e t e t= + Donde ( )Re t corresponde al voltaje sobre la resistencia y ( )Ce t es la caída de voltaje en el condensador, de esta manera se puede escribir la ecuación:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1( ) ( ) ( )ie t Ri t i t dtC
= + ∫
Teniendo en cuenta que:
1( ) ( ) ( )C oe t e t i t dtC
= = ∫
Se obtiene,
( )( ) ode ti t Cdt
=
Por lo que la ecuación diferencial que relaciona ( )ie t con ( )oe t es:
( )( ) ( )oi o
de te t RC e tdt
= +
Reescribiendo esta última ecuación se tiene una ecuación diferencial de primer orden:
( ) 1 1( ) ( )oo i
de t e t e tdt RC RC
+ =
Ejemplo 3.3 Encuentre un modelo matemático que relacione la corriente de entrada ( )ii t con el voltaje de salida ( )oe t , para el circuito eléctrico RC en paralelo de la figura:
Figure 3.6 Circuito RC en paralelo

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Solución: Si se desea relacionar la corriente de entrada ( )ii t con la tensión de salida ( )oe t , se puede aplicar la ley de corrientes de Kirchhoff al nodo, así:
( ) ( ) ( )i R Ci t i t i t= + Donde ( )Ri t corresponde a la corriente a través de la resistencia y ( )Ci t es la corriente a través del condensador, de esta manera se puede escribir la ecuación diferencial que relaciona ( )ii t con ( )oe t :
( )1( ) ( ) oi o
de ti t e t CR dt
= +
Reescribiendo esta última ecuación se tiene una ecuación diferencial de primer orden:
( ) 1 1( ) ( )oo i
de t e t i tdt RC C
+ =
Ejemplo 3.4 Encuentre un modelo matemático que relacione el voltaje de entrada
( )ie t con la corriente de salida ( )oi t , para el circuito eléctrico RLC en serie de la figura:
Figure 3.7 Circuito RLC en serie
Solución: Si se desea relacionar la tensión de entrada ( )ie t con la corriente de salida ( )oi t , se puede aplicar la ley de voltajes de Kirchhoff a la malla, así:
( ) ( ) ( ) ( )i R L Ce t e t e t e t= + +

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Donde ( )Re t corresponde al voltaje sobre la resistencia, ( )Le t es el voltaje en la bobina y ( )Ce t es la caída de voltaje en el condensador, de esta manera se puede escribir la ecuación diferencial que relaciona ( )ie t con ( )oi t :
( ) 1( ) ( ) ( )oi o o
di te t Ri t L i t dtdt C
= + + ∫
Derivando esta última ecuación se tiene que:
2
2
( ) ( ) ( ) 1 ( )i o oo
de t di t d i tR L i tdt dt dt C
= + +
Reescribiendo esta última ecuación se tiene una ecuación diferencial de segundo orden:
2
2
( ) ( ) ( )1 1( )o o io
d i t di t de tR i tdt L dt LC L dt
+ + =
Ejemplo 3.5 Encuentre un modelo matemático que relacione el voltaje de entrada
( )ie t con el voltaje de salida ( )oe t , para el circuito eléctrico de la figura:
Figure 3.8 Circuito RC
Solución: El parámetro de entrada en este caso es el voltaje ( )ie t , y el parámetro de salida es el voltaje sobre el condensador ( )oe t , se puede aplicar la ley de voltajes de Kirchhoff para la malla 1 de esta forma:
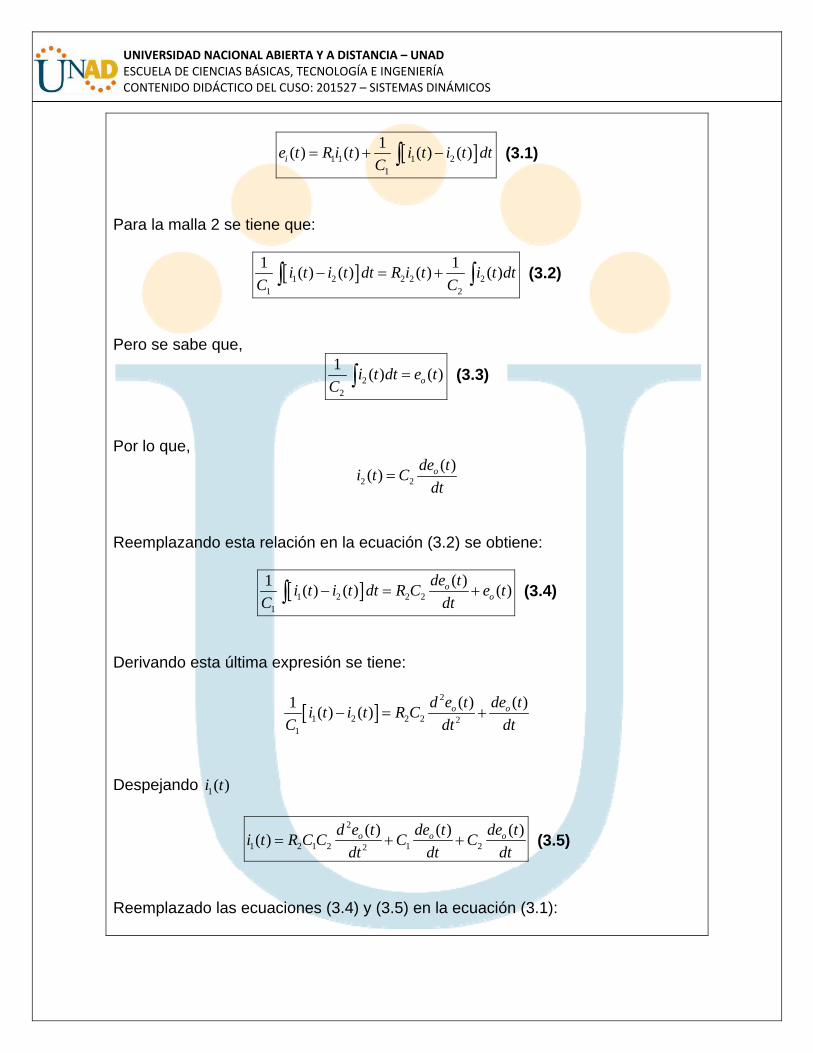
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ]1 1 1 21
1( ) ( ) ( ) ( )ie t R i t i t i t dtC
= + −∫ (3.1)
Para la malla 2 se tiene que:
[ ]1 2 2 2 21 2
1 1( ) ( ) ( ) ( )i t i t dt R i t i t dtC C
− = +∫ ∫ (3.2)
Pero se sabe que,
22
1 ( ) ( )oi t dt e tC
=∫ (3.3)
Por lo que,
2 2( )( ) ode ti t C
dt=
Reemplazando esta relación en la ecuación (3.2) se obtiene:
[ ]1 2 2 21
( )1 ( ) ( ) ( )oo
de ti t i t dt R C e tC dt
− = +∫ (3.4)
Derivando esta última expresión se tiene:
[ ]2
1 2 2 2 21
( ) ( )1 ( ) ( ) o od e t de ti t i t R CC dt dt
− = +
Despejando 1( )i t
2
1 2 1 2 1 22
( ) ( ) ( )( ) o o od e t de t de ti t R C C C Cdt dt dt
= + + (3.5)
Reemplazado las ecuaciones (3.4) y (3.5) en la ecuación (3.1):

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
2
1 2 1 2 1 1 1 2 2 22
( ) ( ) ( ) ( )( ) ( )o o o oi o
d e t de t de t de te t R R C C R C R C R C e tdt dt dt dt
= + + + +
Reescribiendo esta última ecuación se tiene una ecuación diferencial de segundo orden:
21 1 1 2 2 2
21 2 1 2 1 2 1 2 1 2 1 2
( ) ( ) 1 1( ) ( )o oo i
d e t de tR C R C R C e t e tdt R R C C dt R R C C R R C C
⎛ ⎞+ ++ + =⎜ ⎟⎝ ⎠
2. SISTEMAS MECÁNICOS En esta sección se analizará el modelado matemático de los sistemas mecánicos. La ley fundamental que controla los sistemas mecánicos es la segunda ley de Newton, que se aplica a cualquier sistema mecánico. Antes de representar los sistemas mecánicos es conveniente recordar las definiciones de masa y fuerza. • Masa: La masa de un cuerpo es la cantidad de materia que contiene, en
sistemas LTI se supone siempre constante. Físicamente, la masa es la propiedad de un cuerpo que le da inercia, es decir, resistencia a moverse o detenerse. Un cuerpo es atraído por la Tierra y la magnitud de la fuerza que ejerce la Tierra sobre él se denomina peso. En situaciones prácticas, se conoce el peso w de un cuerpo pero no su masa m . La masa m se calcula a partir de
wmg
=
En donde g es la constante de aceleración gravitacional. El valor de g varía ligeramente de un punto a otro de la superficie terrestre. Como resultado, el peso de un cuerpo varía ligeramente en diferentes puntos de la superficie de la Tierra, pero su masa permanece constante. Para propósitos de ingeniería,
29.8 m/sg =
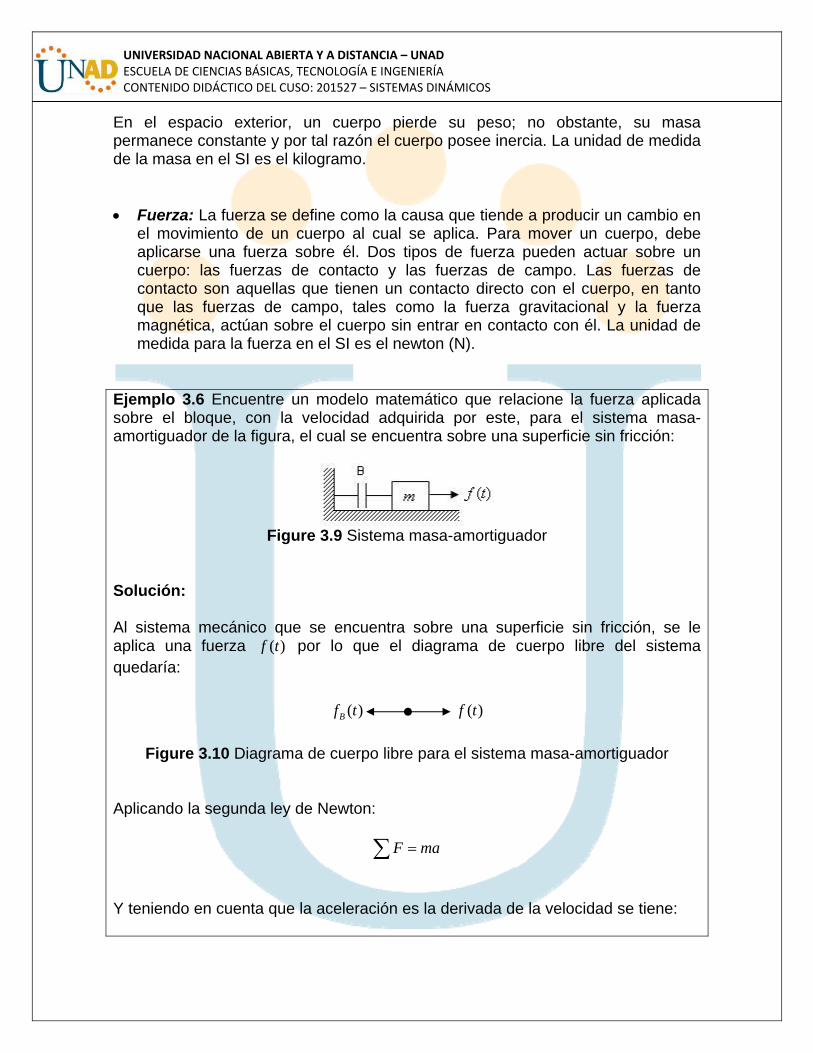
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En el espacio exterior, un cuerpo pierde su peso; no obstante, su masa permanece constante y por tal razón el cuerpo posee inercia. La unidad de medida de la masa en el SI es el kilogramo. • Fuerza: La fuerza se define como la causa que tiende a producir un cambio en
el movimiento de un cuerpo al cual se aplica. Para mover un cuerpo, debe aplicarse una fuerza sobre él. Dos tipos de fuerza pueden actuar sobre un cuerpo: las fuerzas de contacto y las fuerzas de campo. Las fuerzas de contacto son aquellas que tienen un contacto directo con el cuerpo, en tanto que las fuerzas de campo, tales como la fuerza gravitacional y la fuerza magnética, actúan sobre el cuerpo sin entrar en contacto con él. La unidad de medida para la fuerza en el SI es el newton (N).
Ejemplo 3.6 Encuentre un modelo matemático que relacione la fuerza aplicada sobre el bloque, con la velocidad adquirida por este, para el sistema masa-amortiguador de la figura, el cual se encuentra sobre una superficie sin fricción:
Figure 3.9 Sistema masa-amortiguador
Solución: Al sistema mecánico que se encuentra sobre una superficie sin fricción, se le aplica una fuerza ( )f t por lo que el diagrama de cuerpo libre del sistema quedaría:
Figure 3.10 Diagrama de cuerpo libre para el sistema masa-amortiguador Aplicando la segunda ley de Newton:
F ma=∑ Y teniendo en cuenta que la aceleración es la derivada de la velocidad se tiene:
( )f t ( )Bf t
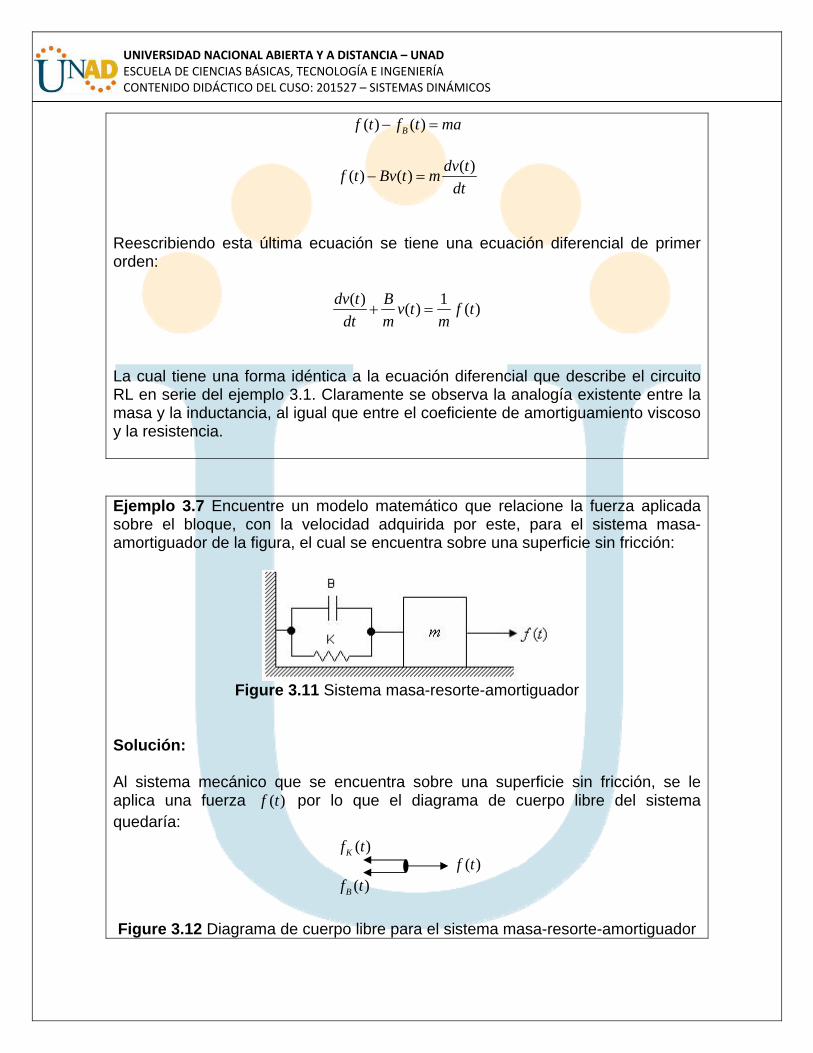
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
( ) ( )Bf t f t ma− =
( )( ) ( ) dv tf t Bv t mdt
− =
Reescribiendo esta última ecuación se tiene una ecuación diferencial de primer orden:
( ) 1( ) ( )dv t B v t f tdt m m
+ =
La cual tiene una forma idéntica a la ecuación diferencial que describe el circuito RL en serie del ejemplo 3.1. Claramente se observa la analogía existente entre la masa y la inductancia, al igual que entre el coeficiente de amortiguamiento viscoso y la resistencia. Ejemplo 3.7 Encuentre un modelo matemático que relacione la fuerza aplicada sobre el bloque, con la velocidad adquirida por este, para el sistema masa-amortiguador de la figura, el cual se encuentra sobre una superficie sin fricción:
Figure 3.11 Sistema masa-resorte-amortiguador
Solución: Al sistema mecánico que se encuentra sobre una superficie sin fricción, se le aplica una fuerza ( )f t por lo que el diagrama de cuerpo libre del sistema quedaría:
Figure 3.12 Diagrama de cuerpo libre para el sistema masa-resorte-amortiguador
( )f t
( )Bf t
( )Kf t

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Aplicando la segunda ley de Newton
F ma=∑ Y teniendo en cuenta que la aceleración es la derivada de la velocidad se tiene:
( ) ( ) ( )K Bf t f t f t ma− − =
( )( ) ( ) ( ) dv tf t K v t dt Bv t mdt
− − =∫
Derivando esta ecuación se obtiene:
2
2
( ) ( ) ( )( )df t dv t d v tKv t B mdt dt dt
− − =
Reescribiendo esta última ecuación se tiene una ecuación diferencial de segundo orden:
2
2
( ) ( ) 1 ( )( )d v t B dv t K df tv tdt m dt m m dt
+ + =
La cual tiene una forma idéntica a la ecuación diferencial que describe el circuito RLC en serie del ejemplo 3.4. 3. SISTEMAS DE NIVEL DE LÍQUIDO Un sistema de nivel de líquido (sistema hidráulico), se describe mediante ecuaciones diferenciales lineales o no lineales, en dependencia de si el flujo manipulado es laminar o turbulento, respectivamente. Esto se puede establecer de acuerdo con la magnitud del número de Reynolds. Si el número de Reynolds está entre 3000 y 4000, el flujo es turbulento. El flujo es laminar si el número de Reynolds es menor que unos 2000.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Si se introduce el concepto de resistencia y capacitancia para los sistemas del nivel de líquido, es posible describir en forma simple las características dinámicas de tales sistemas. • Resistencia: Considere el flujo a través de un tubo corto que conecta dos
tanques. La resistencia R para el flujo de líquido en tal tubo se define como el cambio en la diferencia de nivel (la diferencia entre el nivel de líquido en los dos tanques) necesaria para producir un cambio de una unidad en la velocidad del flujo; es decir,
[ ]R =
⎡ ⎤⎣ ⎦3
cambio en la diferencia de nivel mcambio en la velocidad del flujo m /s
Para entender mejor este concepto, considere el sistema del nivel de líquido de la figura 3.13. En este sistema el líquido sale a chorros a través de la válvula de carga a un lado del tanque. Si el flujo a través de esta restricción es laminar, la relación entre la velocidad del flujo en estado estable y la altura en estado estable en el nivel de la restricción se obtiene mediante
Q KH= (3.6) Donde, Q : Velocidad del flujo del líquido en estado estable, 3m /s⎡ ⎤⎣ ⎦
K : Coeficiente, 2m /s⎡ ⎤⎣ ⎦
H : Altura en estado estable, [ ]m
Figure 3.13 Sistema de nivel de líquido

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Entonces, la resistencia lR se obtiene mediante:
ldH HRdQ Q
= = (3.7)
Se aprecia que la resistencia del flujo laminar es constante y análoga a la resistencia eléctrica. Si el flujo es turbulento a través de la restricción, la velocidad del flujo en estado estable se obtiene mediante:
Q K H= (3.8) La resistencia tR para el flujo turbulento, se obtiene a partir de:
tdHRdQ
=
Derivando la ecuación (3.8) se obtiene
2KdQ dHH
= (3.9)
Reemplazando las ecuaciones (3.8) y (3.9) en la ecuación (3.7), se tiene
2t
HRQ
= (3.10)
Se observa que la resistencia de flujo turbulento depende del flujo y de la altura. Sin embargo, el valor de tR se considera constante si los cambios en la altura y en el flujo son pequeños.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Capacitancia: La capacitancia C de un tanque se define como el cambio necesario en la cantidad de líquido almacenado, para producir un cambio en la altura.
[ ]C
⎡ ⎤⎣ ⎦=3cambio en el líquido almacenado m
cambio en la altura m
Debe señalarse que la capacidad ( 3m ) y la capacitancia ( 2m ) son diferentes. La capacitancia del tanque es igual a su área transversal. Si ésta es constante, la capacitancia es constante para cualquier altura. Ejemplo 3.8 Encuentre un modelo matemático que relacione el flujo de entrada
( )iq t con el flujo de salida ( )oq t , para el sistema de nivel de líquido de la figura:
Figure 3.14 Sistema de nivel de líquido Solución: El parámetro de entrada en este caso es el flujo ( )iq t , y el parámetro de salida es el flujo ( )oq t , se puede analizar el sistema teniendo en cuenta que:
flujo de entrada - flujo de salida = flujo acumulado
Válvula de control
Válvula de carga
Capacitancia C
Resistencia R
iq
oq
h

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Es decir, ( )( ) ( )i o
dh tq t q t Cdt
− =
Teniendo en cuenta que,
( ) ( )oh t Rq t= Se obtiene:
( )( ) ( ) oi o
dq tq t q t RCdt
− =
Reescribiendo esta última ecuación se tiene una ecuación diferencial de primer orden:
( ) 1 1( ) ( )oo i
dq t q t q tdt RC RC
+ =
La cual tiene una forma idéntica a la ecuación diferencial que describe el circuito RC en serie del ejemplo 3.2. Ejemplo 3.9 Encuentre un modelo matemático que relacione el flujo de entrada
( )iq t con la altura del líquido acumulado ( )h t , para el sistema de nivel de líquido de la figura 3.14. Solución: El parámetro de entrada en este caso es el flujo ( )iq t , y el parámetro de salida es la altura del líquido acumulado ( )h t , se puede analizar el sistema teniendo en cuenta que:
flujo de entrada - flujo de salida = flujo acumulado

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Es decir, ( )( ) ( )i o
dh tq t q t Cdt
− =
Teniendo en cuenta que,
1( ) ( )oq t h tR
=
Se obtiene:
1 ( )( ) ( )idh tq t h t C
R dt− =
Reescribiendo esta última ecuación se tiene una ecuación diferencial de primer orden:
( ) 1 1( ) ( )idh t h t q t
dt RC C+ =
La cual tiene una forma idéntica a la ecuación diferencial que describe el circuito RC en paralelo del ejemplo 3.3. Ejemplo 3.10 Encuentre un modelo matemático que relacione el flujo de entrada
( )q t con el flujo de salida 2 ( )q t , para el sistema de nivel de líquido de la figura:
Figure 3.15 Sistema de nivel de líquido con interacción
1C
1R
1q 2C
2R
Tanque 1 q
1h 2h
2q
Tanque 2

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Solución: Usando los símbolos definidos en la figura, obtenemos las ecuaciones siguientes para este sistema:
11 1
( )( ) ( ) dh tq t q t Cdt
− = (3.11)
1 2 1 1( ) ( ) ( )h t h t R q t− = (3.12)
2
1 2 2( )( ) ( ) dh tq t q t C
dt− = (3.13)
2 2 2( ) ( )h t R q t= (3.14)
Derivando la ecuación (3.14) y reemplazando en la ecuación (3.13) se obtiene:
21 2 2 2
( )( ) ( ) dq tq t q t R Cdt
− =
Despejando 1( )q t de esta última ecuación y luego derivando se obtiene:
21 2 2
2 2 2
( ) ( ) ( )dq t d q t dq tR Cdt dt dt
= + (3.15)
Despejando 1( )h t de la ecuación (3.12) y luego derivando se obtiene:
1 21
( ) ( )( )dh t dh tdq tRdt dt dt
= + (3.16)
Reemplazando las ecuaciones (3.15) y (3.16) en la ecuación (3.11) se obtiene:
22 2 2 2
2 2 2 1 1 2 2 1 1 2 12
( ) ( ) ( ) ( )( ) ( )dq t d q t dq t dq tq t R C q t R C R C R C R Cdt dt dt dt
− − = + +

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Reescribiendo esta última ecuación se tiene una ecuación diferencial de segundo orden:
22 1 1 2 1 2 2 2
221 1 2 2 1 1 2 2 1 1 2 2
( ) ( ) 1 1( ) ( )d q t R C R C R C dq t q t q tdt R C R C dt R C R C R C R C
⎛ ⎞+ ++ + =⎜ ⎟⎝ ⎠
La cual tiene una forma idéntica a la ecuación diferencial que describe el circuito RC del ejemplo 3.5. 4. SISTEMAS TÉRMICOS Los sistemas térmicos son aquellos que involucran la transferencia de calor de una sustancia a otra. Estos sistemas se analizan en términos de resistencia y capacitancia, aunque la capacitancia térmica y la resistencia térmica tal vez no se representen con precisión como elementos de parámetros concentrados, dado que, por lo general, están distribuidas en todas las sustancias. Para lograr análisis precisos, deben usarse modelos de parámetros distribuidos. Sin embargo, para simplificar el análisis, se supondrá que un sistema térmico se representa mediante un modelo de parámetros concentrados, que las sustancias que se caracterizan mediante una resistencia al flujo de calor tienen una capacitancia térmica insignificante y que las sustancias que se caracterizan por una capacitancia térmica tienen una resistencia insignificante al flujo de calor. El calor fluye de una sustancia a otra de tres formas diferentes: por conducción, por convección y por radiación. Aquí sólo se considerarán la conducción y la convección, ya que la transferencia de calor por radiación sólo se aprecia si la temperatura del emisor es muy alta en comparación con la del receptor. La mayor parte de los procesos térmicos en los sistemas de control de procesos no involucran transferencia de calor por radiación. Para la transferencia de calor por conducción o convección se tiene que:
q K θ= Δ (3.17)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Donde, q : Flujo de calor, [ ]kcal/seg
θΔ : Diferencia de temperatura, [ ]ºC
K : Coeficiente, [ ]kcal/segºC El coeficiente K se obtiene mediante:
por conducciónkAKx
=Δ
(3.18)
por convecciónK HA= (3.19)
En donde, k : Conductividad térmica, [ ]kcal/m seg ºC
A : Área normal para flujo de calor, 2m⎡ ⎤⎣ ⎦
xΔ : Espesor del conductor, [ ]m
H : Coeficiente de convección, 2kcal/m seg ºC⎡ ⎤⎣ ⎦ Si se introduce el concepto de resistencia y capacitancia térmicas, es posible describir en forma simple las características dinámicas de los sistemas térmicos. • Resistencia térmica: La resistencia térmica R para la transferencia de calor
entre dos sustancias se define del modo siguiente:
[ ][ ]
R =cambio en la diferencia de temperatura ºC
cambio en el flujo de calor kcal/seg
La resistencia térmica para una transferencia de calor por conducción o por convección se obtiene mediante
( ) 1dRdq KθΔ
= = (3.20)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Dado que los coeficientes de conductividad y convección térmica son casi constantes, la resistencia térmica para la conducción o la convección es constante. • Capacitancia térmica: La capacitancia térmica C se define mediante:
[ ][ ]
C =cambio en el calor almacenado kcal
cambio en la temperatura ºC
O bien,
C mc= (3.21) En donde, m : Masa de la sustancia considerada, [ ]kg
c : Calor específico de la sustancia, [ ]kcal/kg ºC Ejemplo 3.11 Encuentre un modelo matemático que relacione el flujo de calor a la entrada ( )iq t con el flujo de calor a la salida ( )oq t , para el sistema térmico de la figura:
Figure 3.16 Sistema térmico Solución: El parámetro de entrada en este caso es el flujo de calor a la entrada ( )iq t , y el parámetro de salida es el flujo de calor a la salida ( )oq t , se puede analizar el
Líquido frío
Líquido caliente
Mezclador
Calefactor

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
sistema teniendo en cuenta que:
flujo de entrada - flujo de salida = flujo acumulado Es decir,
( )( ) ( )i od tq t q t C
dtθ
− =
Teniendo en cuenta que,
( ) ( )ot Rq tθ = Se obtiene:
( )( ) ( ) oi o
dq tq t q t RCdt
− =
Reescribiendo esta última ecuación se tiene una ecuación diferencial de primer orden:
( ) 1 1( ) ( )oo i
dq t q t q tdt RC RC
+ =
La cual tiene una forma idéntica a la ecuación diferencial que describe el circuito RC en serie del ejemplo 3.2. Ejemplo 3.12 Encuentre un modelo matemático que relacione el flujo de calor a la entrada ( )iq t con la temperatura del líquido acumulado ( )tθ , para el sistema térmico de la figura 3.16. Solución: El parámetro de entrada en este caso es el flujo de calor de entrada ( )iq t , y el parámetro de salida es la temperatura del líquido acumulado ( )tθ , se puede analizar el sistema teniendo en cuenta que:
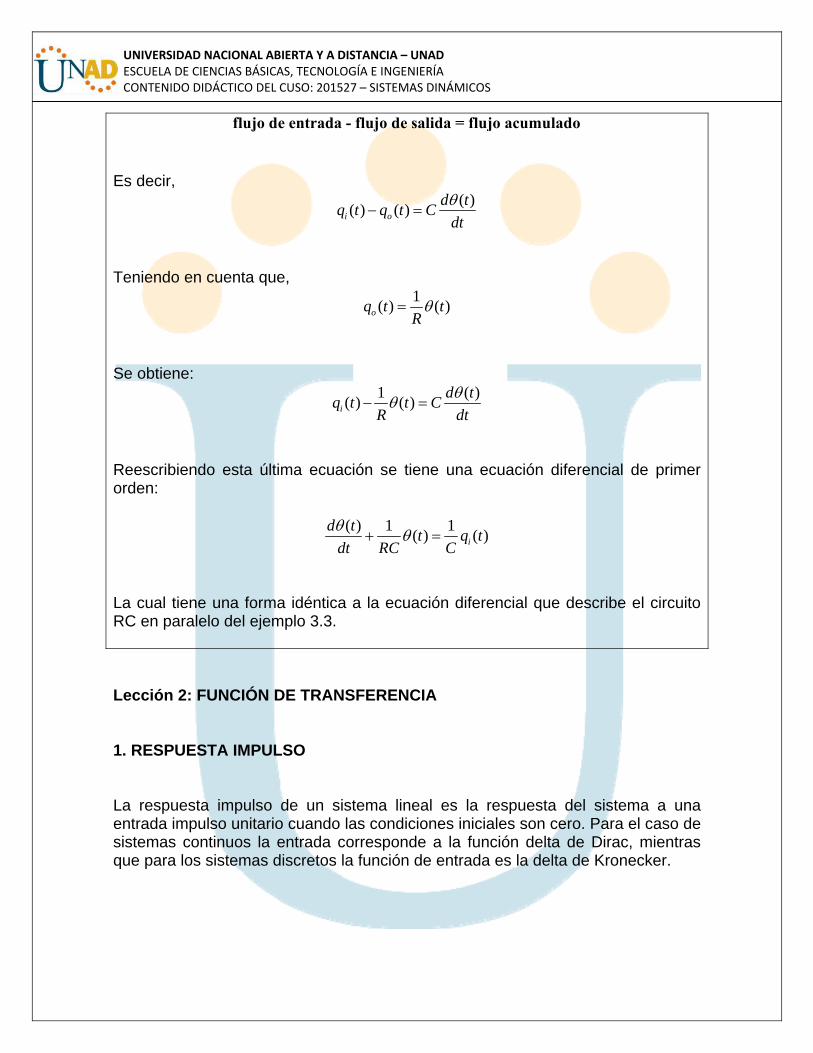
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
flujo de entrada - flujo de salida = flujo acumulado Es decir,
( )( ) ( )i od tq t q t C
dtθ
− =
Teniendo en cuenta que,
1( ) ( )oq t tRθ=
Se obtiene:
1 ( )( ) ( )id tq t t C
R dtθθ− =
Reescribiendo esta última ecuación se tiene una ecuación diferencial de primer orden:
( ) 1 1( ) ( )id t t q t
dt RC Cθ θ+ =
La cual tiene una forma idéntica a la ecuación diferencial que describe el circuito RC en paralelo del ejemplo 3.3. Lección 2: FUNCIÓN DE TRANSFERENCIA 1. RESPUESTA IMPULSO La respuesta impulso de un sistema lineal es la respuesta del sistema a una entrada impulso unitario cuando las condiciones iniciales son cero. Para el caso de sistemas continuos la entrada corresponde a la función delta de Dirac, mientras que para los sistemas discretos la función de entrada es la delta de Kronecker.
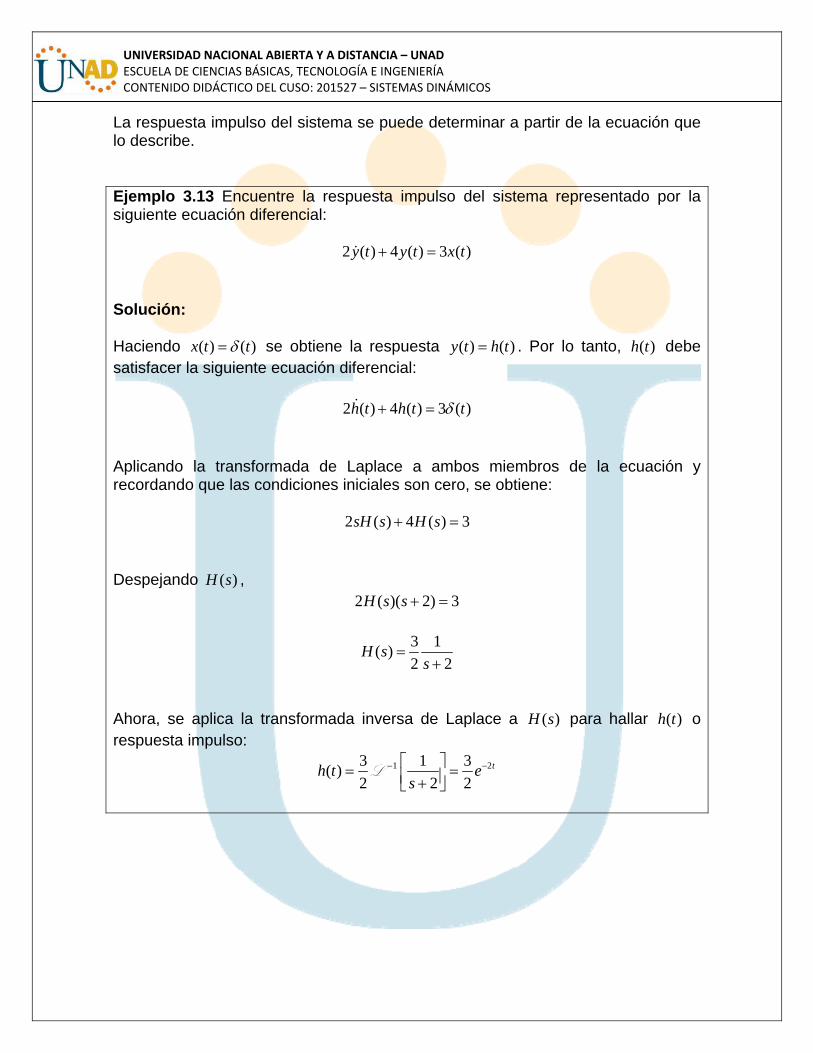
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
La respuesta impulso del sistema se puede determinar a partir de la ecuación que lo describe. Ejemplo 3.13 Encuentre la respuesta impulso del sistema representado por la siguiente ecuación diferencial:
2 ( ) 4 ( ) 3 ( )y t y t x t+ = Solución: Haciendo ( ) ( )x t tδ= se obtiene la respuesta ( ) ( )y t h t= . Por lo tanto, ( )h t debe satisfacer la siguiente ecuación diferencial:
2 ( ) 4 ( ) 3 ( )h t h t tδ+ = Aplicando la transformada de Laplace a ambos miembros de la ecuación y recordando que las condiciones iniciales son cero, se obtiene:
2 ( ) 4 ( ) 3sH s H s+ = Despejando ( )H s ,
2 ( )( 2) 3H s s + =
3 1( )2 2
H ss
=+
Ahora, se aplica la transformada inversa de Laplace a ( )H s para hallar ( )h t o respuesta impulso:
1 23 1 3( )2 2 2
th t es
− −⎡ ⎤= =⎢ ⎥+⎣ ⎦L

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
2. FUNCIÓN DE TRANSFERENCIA DE SISTEMAS CONTINUOS En general, cualquier sistema lineal invariante en el tiempo (LTI) puede modelarse mediante una ecuación diferencial de la forma:
1 1
1 1 0 1 11 1
n n m m
n n m mn n m m
d y d y dy d u d u dua a a y b b b b u n m
dt dt dt dt dt dt
− −
− −− −+ + + + = + + + + ≥donde (3.22)
Esta ecuación diferencial relaciona la señal de salida ( )y t de un sistema con la señal de entrada ( )u t del mismo, y permite conocer la respuesta de dicho sistema a una señal de entrada determinada, mediante su resolución. A esta ecuación se le denomina ecuación diferencial característica del sistema. Sin embargo, el tratamiento analítico del sistema a través de la ecuación diferencial característica es, en general, complejo. Es por ello que se introduce el concepto de función de transferencia. La función de transferencia de un sistema lineal invariante en el tiempo se obtiene realizando la transformada de Laplace de la ecuación diferencial característica del sistema, con condiciones iniciales nulas. Es decir, para obtener la función de transferencia del sistema lineal que está representado la ecuación (3.22), se aplica la transformada de Laplace en ambos lados de la ecuación y se suponen condiciones iniciales cero. El resultado es:
1 11 1 0 1 1( ) ( ) ( ) ( )n n m m
n n m ms a s a s a Y s b s b s b s b U s− −− −+ + + + = + + + +
Entonces, la función de transferencia entre ( )y t y ( )u t está dada por:
10 1 1
11 1
( )( )( )
m mm m
n nn n
b s b s b s bY sG sU s s a s a s a
−−
−−
+ + + += =
+ + + + (3.23)
Donde, ( )U s es la transformada de Laplace de la entrada del sistema y ( )Y s es la transformada de Laplace de la salida del mismo.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
La función de transferencia contiene toda la información de la dinámica del sistema. En concreto, la característica dinámica del sistema depende fundamentalmente de las raíces del polinomio del denominador de la función de transferencia; estas raíces se denominan polos de la función de transferencia. Para que un sistema sea físicamente realizable, el orden del denominador debe ser mayor o igual (de hecho en la práctica siempre es mayor) que el orden del numerador, de este modo se garantiza que el sistema es causal. Por último, hay que resaltar que la función de transferencia no ofrece información sobre la estructura física del sistema, con lo cual diversos sistemas físicos pueden tener la misma función de transferencia, aplicándose, de este modo, el concepto de sistema análogo. Los sistemas análogos son útiles cuando alguno de los sistemas es complejo, caro, frágil o de respuesta muy lenta (por ejemplo, en aplicaciones con prototipos electrónicos). Algunas de las propiedades de la función de transferencia se resumen a continuación: • La función de transferencia está definida solamente para un sistema lineal
invariante en el tiempo. No está definida para sistemas no lineales. • La función de transferencia entre un par de variables de entrada y de salida es
la relación entre la transformada de Laplace de la salida y la transformada de Laplace de la entrada.
• Todas las condiciones iniciales del sistema son cero. • La función de transferencia de un sistema de tiempo continuo se expresa sólo
como una función de la variable compleja s . No es función del tiempo, o de cualquier otra variable que se utilice como la variable independiente.
Ejemplo 3.14 Encuentre la función de transferencia del sistema que tiene como modelo matemático la siguiente ecuación diferencial:
6 8 5y y y u u+ + = − +
co01802286
Resaltado

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Solución: La función de transferencia se puede hallar aplicando la propiedad de la diferenciación real:
[ ] [ ]2 ( ) (0) (0) 6 ( ) (0) 8 ( ) ( ) (0) 5 ( )s Y s sy y sY s y Y s sU s u U s− − + − + = − − + Teniendo en cuenta que las condiciones iniciales son cero, se tiene
2 ( ) 6 ( ) 8 ( ) ( ) 5 ( )s Y s sY s Y s sU s U s+ + = − + Agrupando términos y despejando se obtiene:
2
( ) 5( )( ) 6 8
Y s sG sU s s s
− += =
+ +
3. FUNCIÓN DE TRANSFERENCIA DE SISTEMAS DISCRETOS Los sistemas de control en tiempo discreto pueden operar en parte en tiempo discreto y en parte en tiempo continuo. De esta manera, en dichos sistemas de control algunas señales aparecen como funciones en tiempo discreto y otras señales como funciones en tiempo continuo. Al analizar sistemas de control en tiempo discreto, la teoría de la transformada Z juega un papel importante. Para demostrar por qué el método de la transformada Z es útil en el análisis de sistemas de control en tiempo discreto, primero se presenta el concepto de muestreo mediante impulsos y luego se estudia la retención de datos. 3.1. Muestreo de una Señal Una señal continua se puede convertir a una señal discreta mediante un muestreador que convierte la señal en un tren de impulsos, a una rata o periodo de muestreo T , y magnitud de cada impulso igual al valor muestreado de la señal continua en el instante de muestreo.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 3.17 Muestreo mediante impulsos El tren de impulsos unitarios se puede representar mediante la ecuación:
0
( ) ( ) ( ) ( ) ( 2 )k
T t kT T t T t Tδ δ δ δ δ∞
=
= − = + − + − +∑ (3.24)
La señal muestreada se puede representar como la magnitud de la señal en el instante muestreado multiplicada por el tren de impulsos de la siguiente manera:
0*( ) ( ) ( ) (0) ( ) ( ) ( ) (2 ) ( 2 )
kx t x kT t kT x T x T t T x T t Tδ δ δ δ
∞
=
= − = + − + − +∑ (3.25)
Sacando la transformada de Laplace a la señal muestreada se tiene:
[ ] [ ] [ ] [ ]2
*( ) *( ) (0) ( ) ( ) ( ) (2 ) ( 2 )
*( ) (0) ( ) (2 )sT sT
X s x t x T x T t T x T U t T
X s x x T e x T e
δ δ δ− −
= = + − + − +
= + + +
L L L L
Ahora se puede escribir,
0
*( ) ( ) ksT
k
X s x kT e∞
−
=
=∑ (3.26)
Si sTz e= , es decir (1 ) ln( )s T z= , entonces:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
( )x t * ( )x t
( )tδ
Señal continua Muestreador Señal muestreada

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
(1 )ln( )0
*( ) ( ) ( )ks T z
k
X s x kT z X z∞
−=
=
= =∑ (3.27)
Se aprecia que la transformada de Laplace de una señal muestreada equivale a la transformada Z de dicha señal, si sTz e= . 3.2. Retención de Datos La retención de datos es un proceso de recuperación de la señal continua a partir de la señal discreta. El retenedor utiliza las muestras anteriores para extrapolar la señal continua entre el instante de muestreo presente y el siguiente. El retenedor más utilizado es el retenedor de orden cero ZOH (por sus siglas en inglés “Zero Order Hold”). Este retenedor genera una señal continua ( )h t , manteniendo o reteniendo cada valor de la muestra durante el periodo de muestreo. Esto es:
( ) ( )h kT t x kT+ = (3.28)
Figure 3.18 Reconstrucción efectuada por el ZOH
Se puede escribir ( )h t como una suma de señales paso, así:
[ ] [ ]( ) (0) ( ) ( ) (0) ( ) (2 ) ( ) ( 2 )h t x u t x T x u t T x T x T u t T= + − − + − − + Factorizando y reescribiendo se tiene,
[ ] [ ] [ ]( ) (0) ( ) ( ) ( ) ( ) ( 2 ) (2 ) ( 2 ) ( 3 )h t x u t u t T x T u t T u t T x T u t T u t T= − − + − − − + − − − +
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
ZOH
( )h t * ( )x t

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Simplificando la notación se obtiene:
[ ]0
( ) ( ) ( ) ( ( 1) )k
h t x kT u t kT u t k T∞
=
= − − − +∑
Aplicando transformada de Laplace:
( 1)
0 0
1( ) ( ) ( )ksT k sT sT
ksT
k k
e e eH s x kT x kT es s s
− − + −∞ ∞−
= =
⎡ ⎤ −= − =⎢ ⎥
⎣ ⎦∑ ∑
Como ( ) ( ) *( )ZOHH s G s X s= , se tiene que la función de transferencia del retenedor de orden cero es:
1( )sT
ZOHeG ss
−−= (3.29)
Nótese que esta función de transferencia no corresponde a ningún dispositivo físico, porque se ha deducido suponiendo funciones impulso en la entrada del retenedor de orden cero; sin embargo, si se utiliza junto con el muestreo ideal, proporcionan una buena descripción matemática del procedimiento de muestreo y reconstrucción real de las señales de un sistema de control en tiempo discreto. 3.3. Teorema del Muestreo Los sistemas de control en tiempo discreto conllevan de manera inherente operaciones de muestreo y reconstrucción de señales.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 3.19 Muestreo y reconstrucción de una señal
Estos procesos deben verificar en todo momento el teorema del muestreo, siendo este teorema fundamental en sistemas discretos, como se comprobará a continuación. Sea ( )f t una señal con espectro de banda limitada:
Figure 3.20 Espectro de la señal ( )f t
Donde 1ω es la máxima frecuencia que presenta ( )f t . Según la expresión:
*
0
1( ) ( )sn
F s F s jnT
ω∞
=
= ±∑
El muestreo ideal equivale a una repetición de este espectro centrado en snω . De este modo, el espectro de la señal muestreada con muestreo ideal puede sufrir dos situaciones diferentes:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• 12sω ω≥ :
Figure 3.21 Repetición del espectro de la señal debido al muestreo
Suponiendo que el retenedor de orden cero es un filtro pasa bajo ideal, se obtendría la señal previa al muestreo como salida del mismo. Sin embargo, un filtro paso bajo ideal no es causal, y por ello el retenedor de orden cero distorsiona y no elimina totalmente las componentes en alta frecuencia de la señal muestreada, notándose más este efecto cuanto menor es la relación 1/sω ω . En conclusión, interesa trabajar siempre con la relación 1/sω ω lo más grande posible, despreciando de este modo los efectos del muestreo y la reconstrucción. • 12sω ω< :
Figure 3.22 Superposición de espectros (aliasing)
En este caso aparece un efecto de superposición de espectros que provocan que no sea posible recuperar la señal original previa al muestreo a partir de la señal muestreada, ni en el caso en el cual se realice un filtrado con filtro pasa bajo ideal. A este efecto se le denomina aliasing y siempre debe evitarse en un proceso de muestreo.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
A la vista de las dos situaciones anteriores, se desprende la siguiente afirmación: Teorema de Shannon (o del muestreo): “La mínima frecuencia de muestreo para poder recuperar una señal previa al muestreo, a partir de la señal muestreada a través de un filtro pasa bajo ideal es 12sω ω= , donde 1ω es la máxima frecuencia que presenta la señal a muestrear.” Para poder recuperar la señal original previa al muestreo a partir de la señal muestreada, es necesario efectuar un filtrado pasa bajo. Debe observarse que este filtrado ideal no puede realizarse en la práctica debido a que un filtro con característica espectral rectangular no es causal. Dicho filtrado se realiza normalmente mediante el retenedor de datos de orden cero. En este caso la expresión del espectro del filtro resultante es:
( )2
sinsin1 1 22( ) ( )2
s
sT j T jTj soh oh
ss
Te eG s G j T e eTs j
ω πωω ω
πωω ωπω ω πωω ω ω
− − −−
⎛ ⎞⎜ ⎟− − ⎝ ⎠= ⇒ = = =
2( ) sinc s
j
ohss
G j eπω
ωπ πωω ωω−⎛ ⎞= ⎜ ⎟
⎝ ⎠ (3.30)
En la figura siguiente se observa como este filtro distorsiona la señal recuperada debido a un filtrado bastante alejado del ideal; este filtrado mejora cuanto mayor es la frecuencia de muestreo, proporcionando un resultado que coincide con el previsible a partir de una observación en dominio temporal.
Figure 3.23 Distorsión del espectro de la señal al recuperar con el ZOH
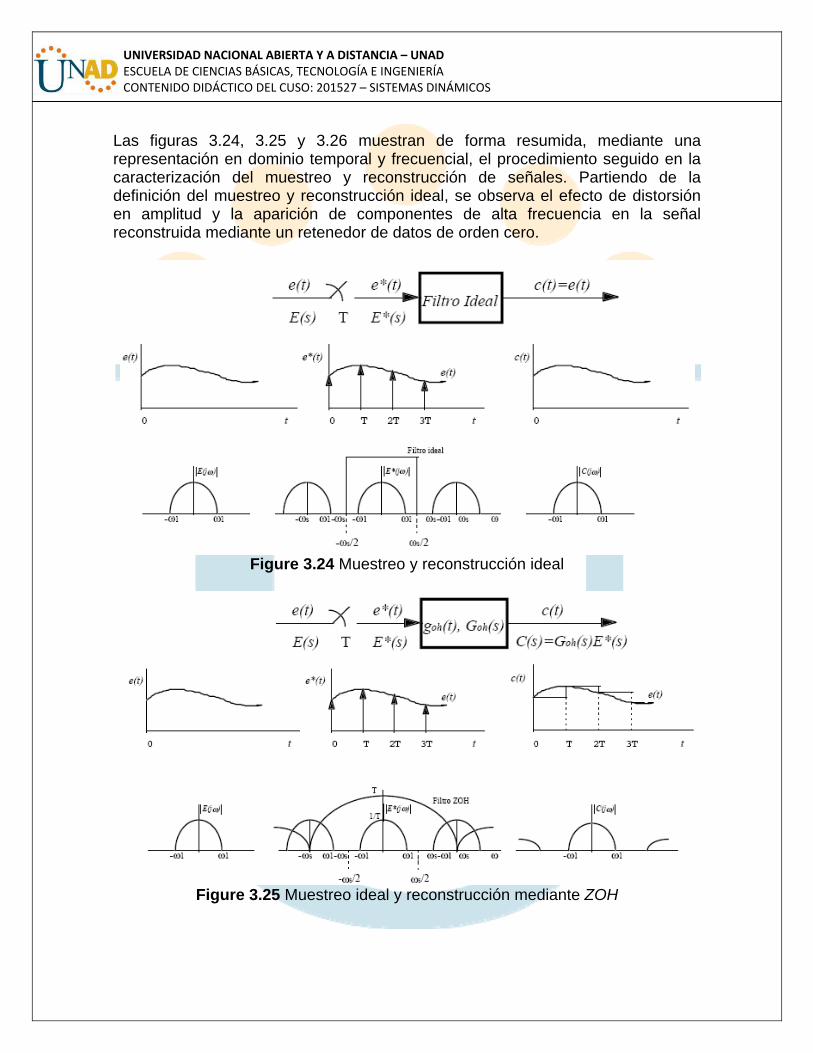
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Las figuras 3.24, 3.25 y 3.26 muestran de forma resumida, mediante una representación en dominio temporal y frecuencial, el procedimiento seguido en la caracterización del muestreo y reconstrucción de señales. Partiendo de la definición del muestreo y reconstrucción ideal, se observa el efecto de distorsión en amplitud y la aparición de componentes de alta frecuencia en la señal reconstruida mediante un retenedor de datos de orden cero.
Figure 3.24 Muestreo y reconstrucción ideal
Figure 3.25 Muestreo ideal y reconstrucción mediante ZOH

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 3.26 Muestreo real (ancho de pulso p ) y reconstrucción mediante ZOH
Por último, puede demostrarse que el análisis del efecto de la anchura real de pulso p del muestreador, proporciona como resultado una envolvente de forma sinc en el espectro de la señal muestreada, de modo que los espectros de la señal original, repetidos mediante el proceso de muestreo, se ven atenuados por dicha envolvente, conllevando un efecto de distorsión de amplitud. Afortunadamente, cuando el ancho de pulso es mucho más pequeño que el periodo de muestreo, como lo es habitualmente, dicho efecto es irrelevante frente al hecho de reconstrucción mediante retenedor de orden cero. 3.4. Función de Transferencia Pulso La función de transferencia para un sistema continuo relaciona las transformadas de Laplace de la salida en tiempo continuo con la correspondiente de la entrada en tiempo continuo, mientras que la función de transferencia pulso relaciona las transformadas Z de la salida en los instantes de muestreo con la correspondiente entrada muestreada. Un sistema continuo lineal e invariante en el tiempo queda plenamente caracterizado por su respuesta impuso o por su función de transferencia. Frente a una entrada continua, el sistema proporciona una señal continua a la salida, resultado de la convolución analógica entre la señal de entrada y la respuesta impulso del sistema. La transformada de Laplace de esta señal es igual al producto de la transformada de Laplace de la señal de entrada por la función de transferencia del sistema.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 3.27 Sistema continuo excitado por una entrada continua
La respuesta de un sistema continuo frente a una señal muestreada también sigue siendo continua, y se puede caracterizar mediante la expresión:
0
( ) ( ) ( )k
c t r kT g t kT∞
=
= −∑ (3.31)
Figure 3.28 Sistema continuo excitado por una entrada discreta
Es importante enfatizar la influencia del periodo de muestreo en la señal de salida; debe observarse en la expresión anterior que el simple hecho de cambiar el periodo de muestreo implica, de un modo directo, cambiar la señal de salida. En concreto, el aumento del periodo de muestreo origina una señal de salida mucho más diferenciada respecto a la señal de salida del sistema frente a la misma señal de entrada sin muestrear, tendiendo a tener mayor sobreimpulso y perdiendo, por tanto, estabilidad relativa. El problema de caracterización de esta señal de salida es difícil de realizar por procedimientos habituales y se plantea la cuestión del conocimiento de la señal de salida muestreada. Realizando el muestreo síncrono respeto al muestreo de la señal de entrada y con las herramientas que se dispone en el dominio discreto es posible utilizar métodos de análisis semejantes a los usados en el dominio continuo:
Figure 3.29 Respuesta de un sistema continuo a una entrada discreta
*
0
( ) ( ) ( )k
c t c kT t kTδ∞
=
= −∑ (3.32)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Donde, ( )c kT es la expresión de la convolución discreta y está dada por:
0
( ) ( ) ( )n
c kT r nT g kT nT∞
=
= −∑ (3.33)
La señal,
*
0( ) ( ) ( )
kg t g kT t kTδ
∞
=
= −∑ (3.34)
Se denomina respuesta impulso discreta y permite caracterizar el sistema como un sistema discreto que ofrece una señal de salida discreta al tener una señal de entrada muestreada. Cumpliéndose así que:
( ) ( ) ( )C z R z G z= (3.35) Donde, ( )G z es la función de transferencia en z , que puede obtenerse aplicando la transformada Z sobre la respuesta impulso discreta. De este modo, la caracterización del sistema y el conocimiento de la señal de salida muestreada son sencillos; sin embargo, por esta metodología únicamente se puede conocer la señal de salida en instantes de muestreo y no la señal continua de salida que físicamente se genera en el sistema. Obsérvese que este efecto no es muy importante cuando el periodo de muestreo es mucho más pequeño que la constante de tiempo del sistema continuo. Ejemplo 3.15 Encuentre la función de transferencia pulso ( )G z del sistema representado en la figura 3.28, donde ( )G s está dada por:
1( )G ss a
=+
Solución: Observe que existe un muestreador a la entrada de ( )G s y por tanto la función de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
transferencia pulso es [ ]( ) ( )G z G s=Z . Primero se obtiene la función de respuesta impulso del sistema, así:
[ ]1( ) ( ) atg t G s e− −= =L Por lo tanto,
( ) para 0,1,2,akTg kT e k−= = … Aplicando la transformada Z , se encuentra que la función de transferencia pulso es:
( ) aT
zG zz e−=−
Lección 3: SISTEMAS NO LINEALES En la práctica muchos de los sistemas dinámicos son no lineales. El proceso de linealizar sistemas no lineales es importante, porque linealizar ecuaciones no lineales permite aplicar numerosos métodos de análisis lineal que proporcionen información acerca del comportamiento de los sistemas no lineales. El procedimiento de linealización que se presenta aquí se basa en la expansión de la función no lineal en series de Taylor alrededor del punto de operación (set point) y la retención solo del término lineal. A continuación se presentan los aspectos matemáticos de la técnica de linealización y después se aplica esta técnica a un sistema de intercambio de calor con el fin de obtener un modelo lineal para el sistema. A fin de obtener un modelo matemático lineal para un sistema no lineal, se supone que las variables sólo se desvían ligeramente de alguna condición de operación (set point). Considere un sistema cuya entrada es ( )x t y cuya salida es ( )y t . La relación entre ( )y t y ( )x t se puede escribir así:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
( )y f x= (3.36) Si las condiciones de trabajo en el punto de operación corresponden a pox y poy , la ecuación anterior se expande en series de Taylor alrededor de este punto, del modo siguiente:
( ) ( ) ( )2 32 3
2 3
1 1( )2! 3!
po po po
po po po pox x x x x x
df d f d fy f x x x x x x xdx dx dx= = =
= + − + − + − + (3.37)
En donde las derivadas df dx , 2 2d f dx , 3 3d f dx ,… se evalúan en pox x= . Si la variación pox x− es pequeña, se pueden despreciar los términos pox x− de orden superior, pudiendo escribir esta última ecuación así:
( )po poy y K x x= + − (3.38) Donde,
( ) ypo
po pox x
dfy f x Kdx =
= =
Simplificando un poco la notación se puede escribir la ecuación linealizada del sistema dinámico no lineal así:
y K x= (3.39)
En donde,
ypo poy y y x x x= − = − Se conocen como variables de desviación y permiten observar una relación lineal entre la entrada y la salida del sistema no lineal, cuando este trabaja alrededor de un punto de operación. Ejemplo 3.16 Encuentre un modelo linealizado para el sistema de la figura 3.30, el cual representa un intercambiador de calor junto con su modelo matemático:
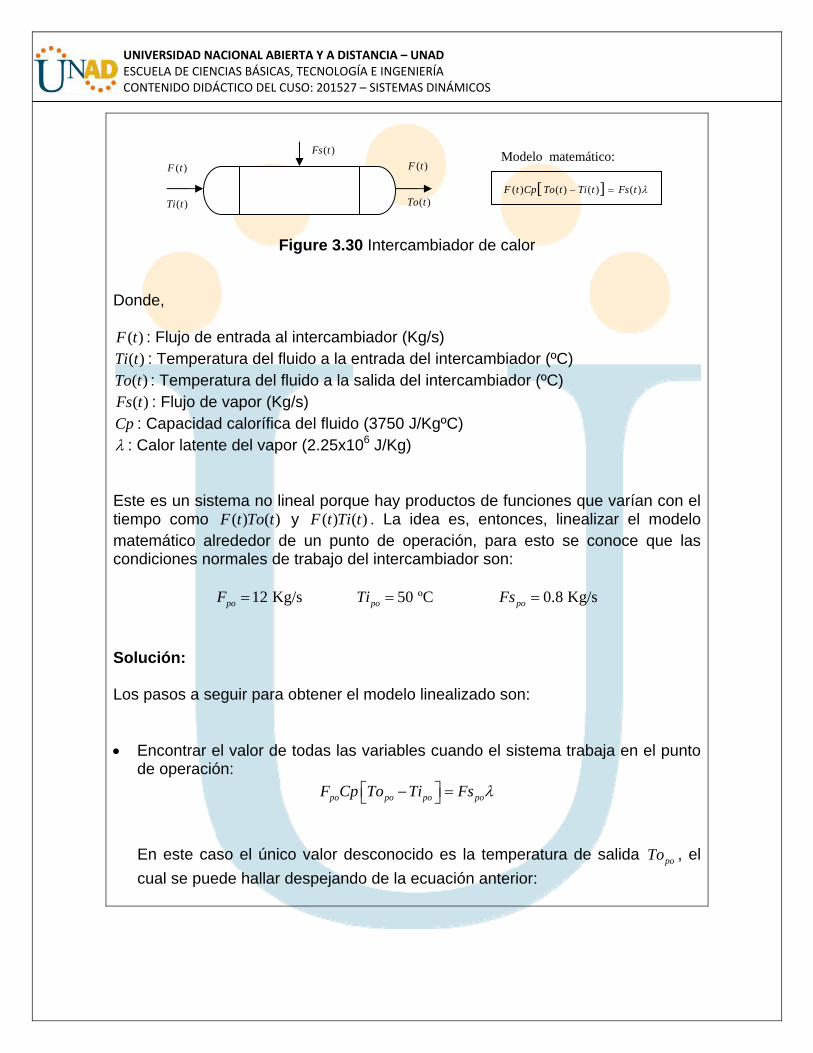
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 3.30 Intercambiador de calor Donde,
( )F t : Flujo de entrada al intercambiador (Kg/s) ( )Ti t : Temperatura del fluido a la entrada del intercambiador (ºC) ( )To t : Temperatura del fluido a la salida del intercambiador (ºC) ( )Fs t : Flujo de vapor (Kg/s)
Cp : Capacidad calorífica del fluido (3750 J/KgºC) λ : Calor latente del vapor (2.25x106 J/Kg) Este es un sistema no lineal porque hay productos de funciones que varían con el tiempo como ( ) ( )F t To t y ( ) ( )F t Ti t . La idea es, entonces, linealizar el modelo matemático alrededor de un punto de operación, para esto se conoce que las condiciones normales de trabajo del intercambiador son:
12 Kg/spoF = 50 ºCpoTi = 0.8 Kg/spoFs = Solución: Los pasos a seguir para obtener el modelo linealizado son: • Encontrar el valor de todas las variables cuando el sistema trabaja en el punto
de operación: po po po poF Cp To Ti Fs λ⎡ ⎤− =⎣ ⎦
En este caso el único valor desconocido es la temperatura de salida poTo , el cual se puede hallar despejando de la ecuación anterior:
( )F t
( )Ti t
( )Fs t( )F t
( )To t[ ]( ) ( ) ( ) ( )F t Cp To t Ti t Fs t λ− =
Modelo matemático:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
6(0.8)(2.25 10 ) (12)(3750)(50) 90 ºC(12)(3750)
po po popo
po
Fs F CpTiTo
F Cpλ + × +
= = =
• Expresar la ecuación del modelo como ( ) 0f x =
[ ]( ) ( ) ( ) ( ) 0F t Cp To t Ti t Fs t λ− − = • Obtener la función linealizada ( )f x como:
( ) 1 2 3 4( ), ( ), ( ), ( ) ( ) ( ) ( ) ( ) 0f F t To t Ti t Fs t K F t K To t K Ti t K Fs t= + + + =
Donde ( ), ( ), ( ), ( )F t To t Ti t Fs t , corresponden a las variables de desviación y están dadas por:
( ) ( ) poF t F t F= −
( ) ( ) poTo t To t To= −
( ) ( ) poTi t Ti t Ti= −
( ) ( ) poFs t Fs t Fs= − Y 1 2 3 4, , ,K K K K , son las derivadas parciales de ( )f x respecto a cada variable, evaluadas en las condiciones del punto de operación, es decir:
[ ] 51 3750 90 50 1.5 10po po
po
fK Cp To TiF∂ ⎡ ⎤= = − = − = ×⎣ ⎦∂
42 (12)(3750) 4.5 10po
po
fK F CpTo∂
= = = = ×∂
43 (12)(3750) 4.5 10po
po
fK F CpTi∂
= = − = − = − ×∂
64 2.25 10
po
fKFs
λ∂= = − = − ×∂
• Reemplazar los valores en la función linealizada para obtener el modelo lineal del sistema:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
5 4 4 61.5 10 ( ) 4.5 10 ( ) 4.5 10 ( ) 2.25 10 ( ) 0F t To t Ti t Fs t× + × − × − × = Lección 4: DIAGRAMAS DE BLOQUES 1. ELEMENTOS DE UN DIAGRAMA DE BLOQUES Un diagrama de bloques de un sistema es una representación gráfica de las funciones realizadas por cada componente y del flujo de las señales. Los elementos de un diagrama de bloques son el bloque, el punto de suma, el punto de bifurcación y las flechas que indican la dirección del flujo de señales.
Figure 3.31 Elementos de un diagrama de bloques
Las ventajas de la representación mediante diagramas de bloques de un sistema radican en que es fácil formar el diagrama de bloques general de todo el sistema con sólo conectar los bloques de los componentes de acuerdo con el flujo de señales y en que es posible evaluar la contribución de cada componente al desempeño general del sistema. El procedimiento para trazar un diagrama de bloques de un sistema es el siguiente: • Se escriben las ecuaciones que describen el comportamiento dinámico de
cada componente. • Se aplica la transformada de Laplace a cada ecuación, suponiendo
condiciones iniciales iguales a cero. • Se representa individualmente cada ecuación en forma de bloques.
Bloque
Punto de suma Punto de bifurcación (Takeoff)
a
b
a b± +
±

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Se integran todos los bloques en un solo diagrama de bloques. Ejemplo 3.17 Hacer una representación en diagrama de bloques del sistema eléctrico de la siguiente figura:
Figure 3.32 Circuito RC
Donde ( )ie t (voltaje de entrada) es la señal de entrada, ( )oe t (voltaje de salida) es la señal de salida e ( )i t es la corriente. Solución: El procedimiento es el siguiente: • Se escriben las ecuaciones dinámicas del sistema:
( ) ( )( ) o ie t e ti tR−
= (a)
1( ) ( )oe t i t dtC
= ∫ (b)
• Se aplica la transformada de Laplace a cada ecuación:
( ) ( )( ) o iE s E sI sR−
= (a)
1( ) ( )oE s I sCs
= (b)
• Se representa cada ecuación en forma de bloques:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
(a)
(b) • Se integran todos los bloques en un solo diagrama
2. REDUCCIÓN DE DIAGRAMAS DE BLOQUES PARA SISTEMAS CONTINUOS Un diagrama de bloques complicado que contenga muchos lazos de realimentación, se puede simplificar mediante la aplicación de las reglas del álgebra de bloques, lo que permite un reordenamiento paso a paso que culmina la reducción del sistema a un solo bloque. Algunas de las reglas más importantes del álgebra de bloque se muestran en la tabla 3.1.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Table 3.1 Reglas del álgebra de bloques
Ejemplo 3.18 Reducir el diagrama de bloques que se presenta a continuación y obtener la función de transferencia.
Figure 3.33 Diagrama de bloques para el ejemplo 3.18
Solución: En primer lugar, lleva el bloque F después del punto de suma, obteniendo:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Ahora, se combinan los bloques en serie F y G , y los bloques del lazo 1 F y J , de manera que se obtiene lo siguiente:
Después, se intercambian los puntos de suma 2 y 3:
Luego, se simplifica el subsistema realimentado que involucra los bloques I y FG , obteniendo un bloque A equivalente a:
1FGAFGI
=−
Nuevamente se simplifican los bloques en serie, en este caso A y H :

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Posteriormente, se simplifica el subsistema realimentado que involucra los bloques HA y J F , obteniendo un bloque B equivalente a:
1FGHB
FGI GHJ=
− +
Finalmente, se reduce el sistema realimentado obteniendo la función de transferencia:
( )( ) 1
C s FGHR s FGI GHJ FGH
=− + +
Otra manera, de realizar la reducción del diagrama de la figura 3.33 se presenta a continuación: Primero se traslada el bloque H antes del bloque de bifurcación y se redistribuye la ubicación de los puntos de suma de la entrada:
Ahora, se simplifica el subsistema realimentado conformado por los bloques ,G H y J , de esta forma se obtiene el bloque D ; al mismo tiempo que se reducen los lazos que llegan al punto de suma de la parte inferior, obteniendo el bloque E :

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Después, se reducen los bloques en serie F y D :
Finalmente, se simplifica el sistema realimentado obteniendo la función de transferencia del sistema. Se recomienda al estudiante realizar esta última verificación. 3. REDUCCIÓN DE DIAGRAMAS DE BLOQUES PARA SISTEMAS DISCRETOS Al analizar los sistemas de control en tiempo discreto, a menudo se encuentra que algunas señales son muestreadas y otras no. Suponga un sistema cuya función de transferencia es ( )G s , como se muestra en la figura 3.34, el cual es controlado por una señal muestreada *( )x t , que corresponde a una señal discreta de periodo T , en donde la amplitud de cada impulso equivale al valor de amplitud que tiene la señal ( )x t en el instante en que se produce el muestreo.
Figure 3.34 Sistema muestreado mediante impulsos
Entonces la ecuación de salida es:
*( ) ( ) ( )Y s G s X s=
* * *( ) ( ) ( )Y s G s X s=
( )G s ( )x t
( )X s
* ( )x t * ( )X s ( )Y s
( )y t
T
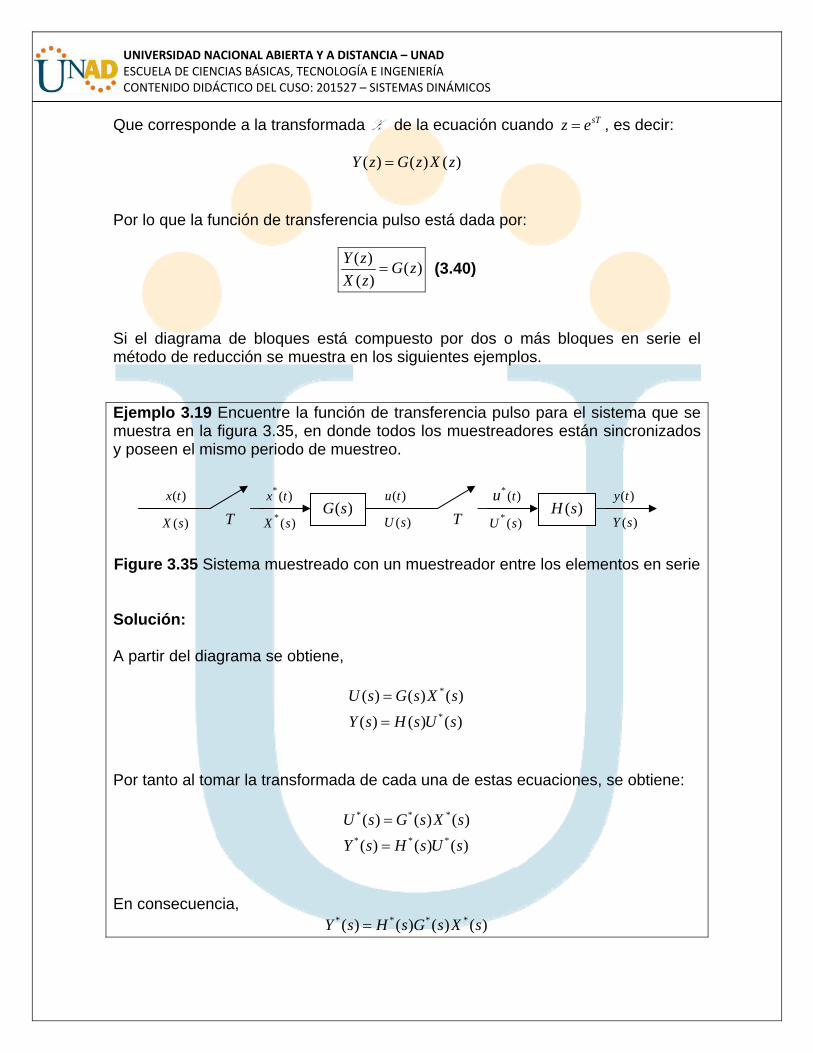
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Que corresponde a la transformada Z de la ecuación cuando sTz e= , es decir:
( ) ( ) ( )Y z G z X z= Por lo que la función de transferencia pulso está dada por:
( ) ( )( )
Y z G zX z
= (3.40)
Si el diagrama de bloques está compuesto por dos o más bloques en serie el método de reducción se muestra en los siguientes ejemplos. Ejemplo 3.19 Encuentre la función de transferencia pulso para el sistema que se muestra en la figura 3.35, en donde todos los muestreadores están sincronizados y poseen el mismo periodo de muestreo.
Figure 3.35 Sistema muestreado con un muestreador entre los elementos en serie Solución: A partir del diagrama se obtiene,
*
*
( ) ( ) ( )( ) ( ) ( )
U s G s X sY s H s U s
=
=
Por tanto al tomar la transformada de cada una de estas ecuaciones, se obtiene:
* * *
* * *
( ) ( ) ( )( ) ( ) ( )
U s G s X sY s H s U s
=
=
En consecuencia,
* * * *( ) ( ) ( ) ( )Y s H s G s X s=
( )G s ( )x t
( )X s
* ( )x t * ( )X s ( )U s
( )u t
T ( )H s
* ( )tu * ( )U s ( )Y s
( )y t
T

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En términos de la transformada Z :
( ) ( ) ( ) ( )Y z H z G z X z= Se concluye que la transformada Z de dos sistemas separados mediante un muestreador es igual al producto de las transformadas Z de los dos sistemas. Es decir, que la función de transferencia está dada mediante:
( ) ( ) ( )( )
Y z G z H zX z
= (3.41)
Ejemplo 3.20 Encuentre la función de transferencia pulso para el sistema que se muestra en la figura 3.36.
Figure 3.36 Sistema muestreado sin muestreador entre los elementos en serie
Solución: A partir del diagrama se encuentra que:
* *( ) ( ) ( ) ( ) ( ) ( )Y s G s H s X s GH s X s= = Al tomar la transformada, se obtiene
[ ]** *( ) ( ) ( )Y s GH s X s= En términos de la transformada Z ,
( ) ( ) ( )Y z GH z X z=
( )G s ( )x t
( )X s
* ( )x t * ( )X s T
( )H s ( )Y s
( )y t

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Y la función de transferencia pulso es
( ) ( )( )
Y z GH zX z
= (3.42)
Si se trata de un sistema en lazo cerrado, la salida del sistema se resume en la tabla 3.2:
Table 3.2 Sistemas de control discreto en lazo cerrado
( ) ( )( )1 ( )G z R zC z
GH z=
+ (3.43)
( ) ( )( )1 ( ) ( )
G z R zC zG z H z
=+
(3.44)
1 2
1 2
( ) ( ) ( )( )1 ( ) ( )G z G z R zC z
G z G H z=
+ (3.45)
2 1
1 2
( ) ( )( )1 ( )G z G R zC z
G G H z=
+ (3.46)
( )( )1 ( )
GR zC zGH z
=+
(3.47)
Se sugiere al estudiante verificar estos resultados, con el fin de afianzar los conocimientos en el tema.
( )G s ( )R s
( )H s
( )C s ( )C z
+ −
( )C z1( )G s
( )H s
+ −
( )R s 2 ( )G s
( )C s
1( )G s
( )H s
( )C z
+ −
( )R s 2 ( )G s
( )C s
( )H s
( )G s ( )R s ( )C s ( )C z
+ −
( )G s ( )R s
( )H s
( )C s ( )C z
+ −

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
4. REGLA DE MASON El ejemplo 3.18 pone en manifiesto que para la obtención de la función de transferencia de un sistema a partir de su diagrama de bloques es necesario desarrollar habilidad en la manipulación de los mismos. Sin embargo, existe un procedimiento general para la obtención de la función de transferencia conocido como la regla de Mason. La regla de Mason emplea las definiciones que se presentan a continuación y que se ilustran en el ejemplo 3.21. • Trayectoria directa: Conjunto de bloques que van de la entrada a la salida, sin
repetirse. • Ganancia de la trayectoria directa: Producto de las ganancias de los bloques
que forman la trayectoria directa. • Lazo cerrado: Conjunto de bloques que parten de un punto de suma o
bifurcación y llegan al mismo punto, sin repetir ningún bloque. • Ganancia de lazo cerrado: Producto de las ganancias de los bloques que
forman un lazo. • Lazos adyacentes: Lazos que comparten al menos un punto de suma o
bifurcación. • Lazos no adyacentes: Lazos que no comparten ningún punto de suma o
bifurcación. Ejemplo 3.21 Reducir el diagrama de bloques que se presenta a continuación usando la regla de Mason y obtener la función de transferencia.
Figure 3.37 Diagrama de bloques para el ejemplo 3.21

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Solución: La única trayectoria directa entre la entrada R y la salida C , está conformada por los bloques ,F G y H . Por lo tanto, la ganancia de la trayectoria directa es:
1M FGH= Además existen tres lazos cerrados, cuyas ganancias son:
1
2
3
L FGHL GHJL FGI
= −= −=
Los signos de las ganancias dependen de la realimentación existente. Estos tres lazos son adyacentes, ya que comparten puntos de suma y de bifurcación. En este ejemplo no existen lazos no adyacentes. El cálculo de la función de transferencia M , aplicando la fórmula de Mason, está dado por:
1
( )( )
Nk k
k
MC sMR s =
Δ= =
Δ∑ (3.48)
En donde, N : Número total de trayectorias directas
kM : Ganancia de la k-ésima trayectoria directa Δ : 1 – (suma de las ganancias de todos los lazos) + (suma de los productos de las ganancias de todas las combinaciones de dos lazos que no se tocan) – (suma de los productos de las ganancias de todas las combinaciones de tres lazos que no se tocan) + …
kΔ : La Δ para aquella parte del diagrama que no toca la k-ésima trayectoria directa Aplicando esta fórmula se obtiene que existe solamente una trayectoria directa:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1M FGH= Además existen tres lazos cerrados, los cuales son adyacentes entre si:
1
2
3
L FGHL GHJL FGI
= −= −=
Por lo que,
1 FGI FGH GHJΔ = − + + Y 1 1Δ = , ya que todos los lazos tocan la trayectoria directa Reemplazando todos estos valores en la fórmula de Mason se obtiene que la función de transferencia del sistema está dada por:
( )( ) 1
C s FGHR s FGI GHJ FGH
=− + +
Lo cual equivale a la solución obtenida en el ejemplo 3.18, cuando se usó el álgebra de bloques. Lección 5: ESPACIO DE ESTADOS Día a día los sistemas de ingeniería se vuelven más complejos debido a que se requiere realizar tareas más complicadas y con mayor precisión. Estos sistemas complejos pueden tener entradas y salidas múltiples, y pueden variar en el tiempo, por lo que la representación mediante funciones de transferencia no es aplicable. Es por esto, que desde 1960 se ha venido desarrollado la teoría de control moderna que permite un nuevo enfoque para el análisis y diseño de sistemas de control complejos basado en el concepto de estado, el cual ya se venía utilizando en el campo de la dinámica clásica y en otros medios.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Se observa entonces, que la teoría de control moderna contrasta con la teoría de control convencional en que la primera se aplica a sistemas con entradas y salidas múltiples, que pueden ser lineales o no lineales, en tanto que la segunda sólo se aplica a sistemas lineales con una entrada y una salida e invariantes con el tiempo. Asimismo, la teoría del control moderna es esencialmente un enfoque en el dominio del tiempo, en tanto que la teoría de control convencional es un enfoque complejo en el dominio de la frecuencia. Así pues, en esta sección se presenta el material introductorio para la representación y el análisis en espacio de estados de los sistemas dinámicos. 1. DEFINICIONES Una ecuación diferencial de n-ésimo orden se puede descomponer en n ecuaciones diferenciales de primer orden. Una ecuación de primer orden es más fácil de resolver que otra de orden más alto. Ejemplo 3.22 Escriba el modelo matemático del circuito eléctrico RLC en serie de la figura, en términos de ecuaciones diferenciales de primer orden:
Figure 3.38 Circuito RLC
Solución: El modelo matemático de este sistema es una ecuación diferencial de segundo orden:
( ) 1( ) ( ) ( )oi o o
di te t Ri t L i t dtdt C
= + + ∫
Para esta ecuación diferencial se tiene:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1
12
( ) ( )
( )( ) ( )
x t i t dt
dx tx t i tdt
=
= =
∫
Por lo que la ecuación diferencial de segundo orden se puede descomponer en dos ecuaciones diferenciales de primer orden así:
12
21 2
( ) ( )
( ) 1 1( ) ( ) ( )i
dx t x tdt
dx t Rx t x t e tdt LC L L
=
= − − +
De igual forma, para la ecuación diferencial de un sistema de n-ésimo orden:
1
1 11
( ) ( ) ( )( ) ( )
n n
n nn n
d y t d y t dy ta a a y t f t
dt dt dt
−
−−+ + + + = (3.49)
Se define,
1
2
1
1
( ) ( )( )( )
( )( )n
n n
x t y tdy tx t
dt
d y tx tdt
−
−
=
=
=
Entonces, la ecuación diferencial de n-ésimo orden se descompone en n ecuaciones diferenciales de primer orden, así:
12
23
1 1 2 2 1 1
( ) ( )
( ) ( )
( ) ( ) ( ) ( ) ( ) ( )nn n n n
dx t x tdt
dx t x tdt
dx t a x t a x t a x t a x t f tdt − −
=
=
= − − − − − +…
(3.50)
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Este conjunto de ecuaciones diferenciales de primer orden se conoce como ecuaciones de estado y 1 2, , , nx x x… son llamadas variables de estado. El estado de un sistema se refiere a las condiciones pasadas, presentes y futuras del sistema. Es conveniente definir un conjunto de variables de estado y ecuaciones de estado para modelar sistemas dinámicos. Las variables 1 2, , , nx x x… son las variables de estado de un sistema de n-ésimo orden, y las n ecuaciones diferenciales de primer orden son las ecuaciones de estado. Las variables de estado deben satisfacer las siguientes condiciones: • En cualquier tiempo inicial 0t t= las variables de estado 1 0 2 0 0( ), ( ), , ( )nx t x t x t…
definen los estados iniciales del sistema. • Una vez que las entradas del sistema para 0t t≥ y los estados iniciales antes
definidos son especificados, las variables de estado deben definir completamente el comportamiento futuro del sistema.
En otras palabras, las variables de estado de un sistema se definen como un conjunto mínimo de variables 1 2, , , nx x x… , de cuyo conocimiento en cualquier tiempo 0t y del conocimiento de la información de la entrada de excitación que se aplica subsecuentemente, se puede determinar el estado del sistema en cualquier tiempo 0t t≥ . 2. ECUACIONES DE ESTADO PARA SISTEMAS CONTINUOS Las n ecuaciones de estado de un sistema de n-ésimo orden se representan como:
1 2 1 2( ) ( ), ( ), , ( ), ( ), ( ), , ( )i
i n pdx t f x t x t x t u t u t u t
dt⎡ ⎤= ⎣ ⎦… …
co01802286
Resaltado
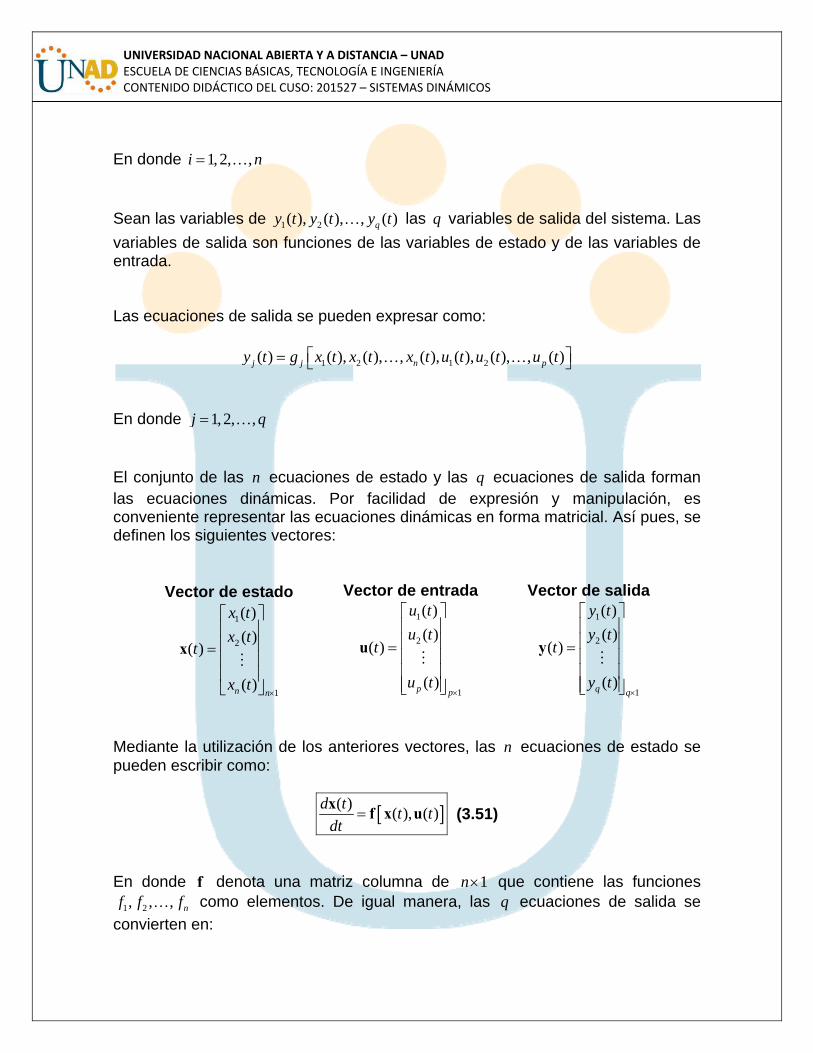
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En donde 1,2, ,i n= … Sean las variables de 1 2( ), ( ), , ( )qy t y t y t… las q variables de salida del sistema. Las variables de salida son funciones de las variables de estado y de las variables de entrada. Las ecuaciones de salida se pueden expresar como:
1 2 1 2( ) ( ), ( ), , ( ), ( ), ( ), , ( )j j n py t g x t x t x t u t u t u t⎡ ⎤= ⎣ ⎦… … En donde 1,2, ,j q= … El conjunto de las n ecuaciones de estado y las q ecuaciones de salida forman las ecuaciones dinámicas. Por facilidad de expresión y manipulación, es conveniente representar las ecuaciones dinámicas en forma matricial. Así pues, se definen los siguientes vectores:
Vector de estado 1
2
1
( )( )
( )
( )n n
x tx t
t
x t×
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
x
Vector de entrada 1
2
1
( )( )
( )
( )p p
u tu t
t
u t×
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
u
Vector de salida 1
2
1
( )( )
( )
( )q q
y ty t
t
y t×
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
y
Mediante la utilización de los anteriores vectores, las n ecuaciones de estado se pueden escribir como:
[ ]( ) ( ), ( )d t t tdt
=x f x u (3.51)
En donde f denota una matriz columna de 1n× que contiene las funciones
1 2, , , nf f f… como elementos. De igual manera, las q ecuaciones de salida se convierten en:
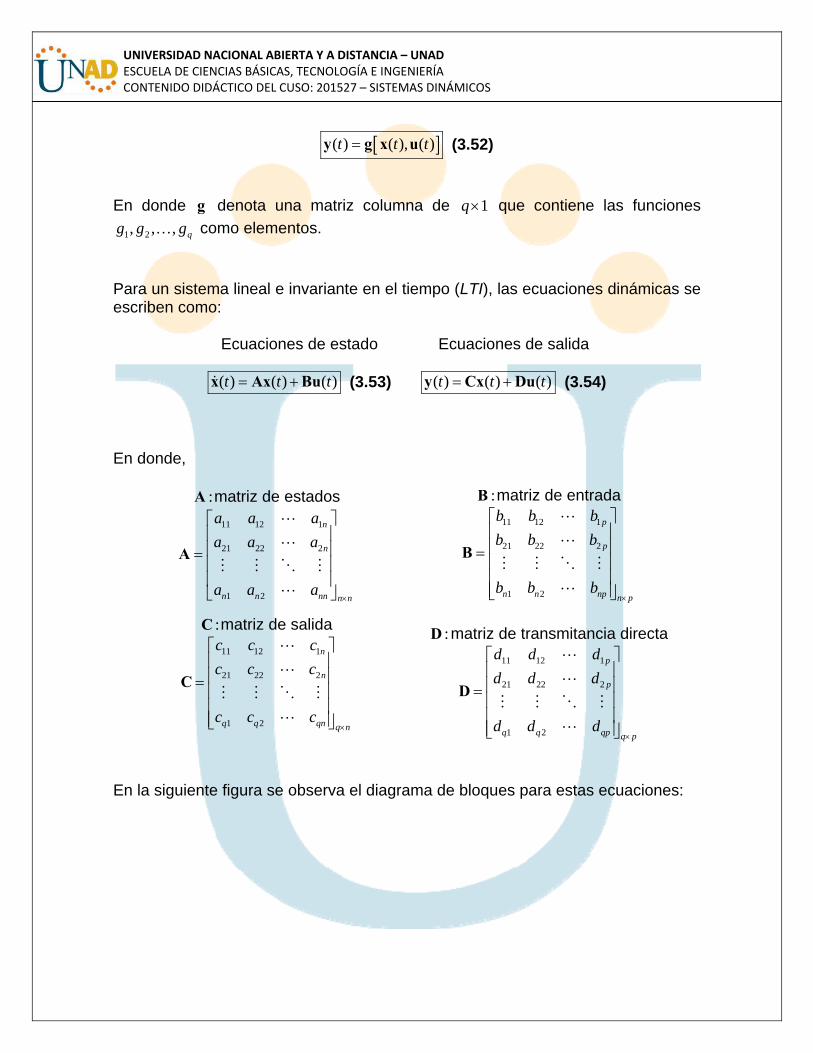
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ]( ) ( ), ( )t t t=y g x u (3.52)
En donde g denota una matriz columna de 1q× que contiene las funciones
1 2, , , qg g g… como elementos. Para un sistema lineal e invariante en el tiempo (LTI), las ecuaciones dinámicas se escriben como:
En donde,
:A matriz de estados 11 12 1
21 22 2
1 2
n
n
n n nn n n
a a aa a a
a a a×
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
A
:B matriz de entrada 11 12 1
21 22 2
1 2
p
p
n n np n p
b b bb b b
b b b×
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
B
:C matriz de salida 11 12 1
21 22 2
1 2
n
n
q q qn q n
c c cc c c
c c c×
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
C
:D matriz de transmitancia directa
11 12 1
21 22 2
1 2
p
p
q q qp q p
d d dd d d
d d d×
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
D
En la siguiente figura se observa el diagrama de bloques para estas ecuaciones:
Ecuaciones de estado
( ) ( ) ( )t t t= +x Ax Bu (3.53)
Ecuaciones de salida
( ) ( ) ( )t t t= +y Cx Du (3.54)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 3.39 Sistema LTI en espacio de estados
Ejemplo 3.23 Encuentre las ecuaciones de estado y de salida para el sistema mecánico que aparece en la figura 3.40.
Figure 3.40 Sistema mecánico
Solución: Se supone que el sistema es lineal y tiene una sola entrada y una sola salida, por lo tanto, la ecuación diferencial que caracteriza al sistema es:
my by ky u+ + = Este sistema es de segundo orden, lo cual significa que posee dos integradores. Se definen las variables de estado 1( )x t y 2 ( )x t como:
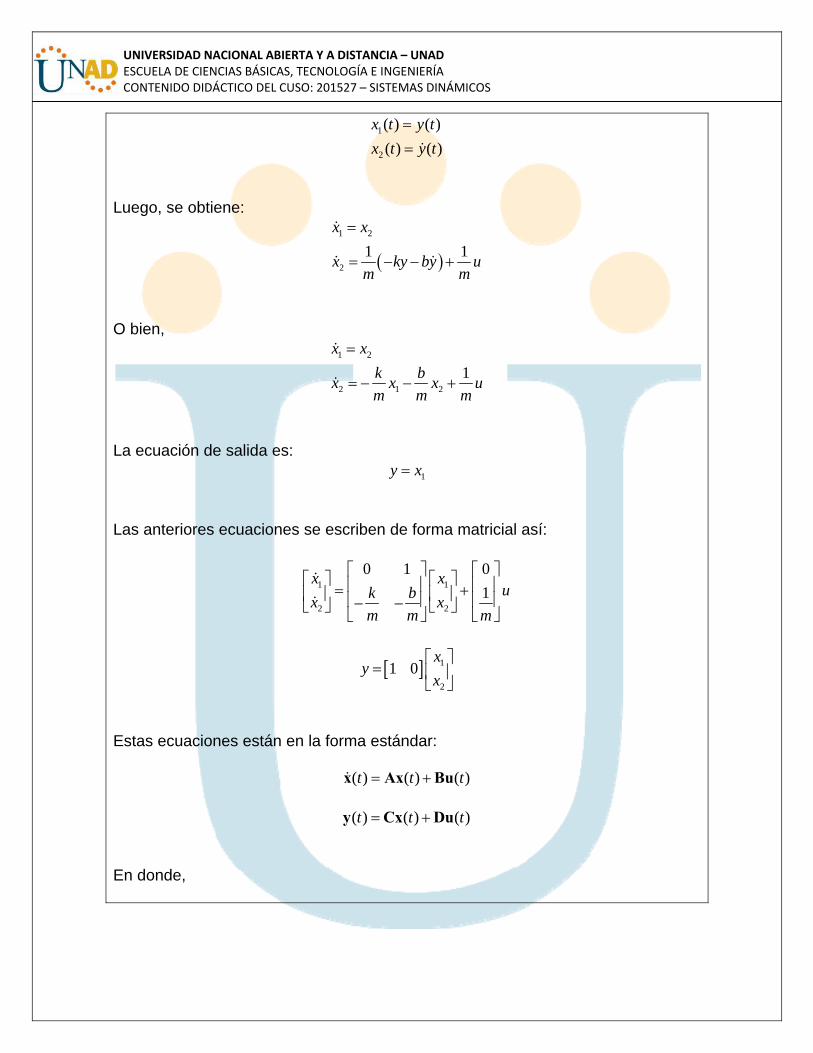
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1
2
( ) ( )( ) ( )
x t y tx t y t
==
Luego, se obtiene:
( )1 2
21 1
x x
x ky by um m
=
= − − +
O bien,
1 2
2 1 21
x xk bx x x um m m
=
= − − +
La ecuación de salida es:
1y x= Las anteriores ecuaciones se escriben de forma matricial así:
1 1
2 2
0 1 01
x xuk bx x
m m m
⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= +⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦
[ ] 1
2
1 0x
yx⎡ ⎤
= ⎢ ⎥⎣ ⎦
Estas ecuaciones están en la forma estándar:
( ) ( ) ( )t t t= +x Ax Bu
( ) ( ) ( )t t t= +y Cx Du En donde,
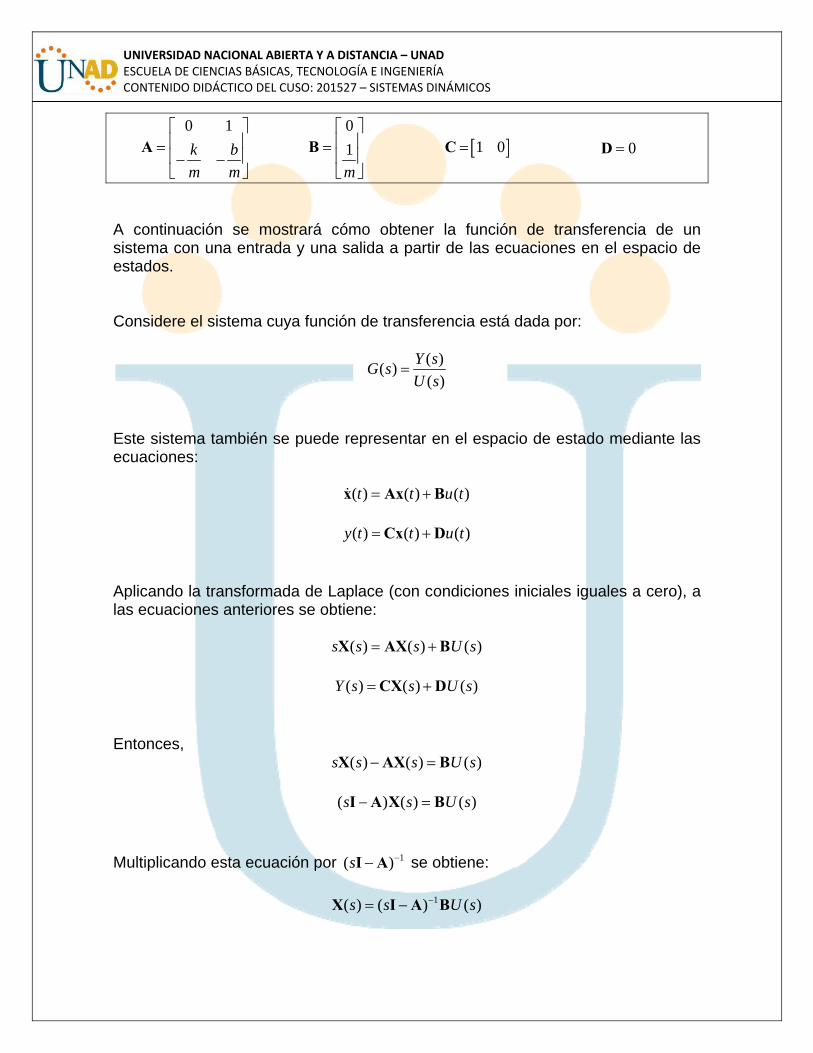
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
0 1k bm m
⎡ ⎤⎢ ⎥=⎢ ⎥− −⎣ ⎦
A 01m
⎡ ⎤⎢ ⎥=⎢ ⎥⎣ ⎦
B [ ]1 0=C 0=D
A continuación se mostrará cómo obtener la función de transferencia de un sistema con una entrada y una salida a partir de las ecuaciones en el espacio de estados. Considere el sistema cuya función de transferencia está dada por:
( )( )( )
Y sG sU s
=
Este sistema también se puede representar en el espacio de estado mediante las ecuaciones:
( ) ( ) ( )t t u t= +x Ax B
( ) ( ) ( )y t t u t= +Cx D Aplicando la transformada de Laplace (con condiciones iniciales iguales a cero), a las ecuaciones anteriores se obtiene:
( ) ( ) ( )s s s U s= +X AX B
( ) ( ) ( )Y s s U s= +CX D Entonces,
( ) ( ) ( )s s s U s− =X AX B
( ) ( ) ( )s s U s− =I A X B
Multiplicando esta ecuación por 1( )s −−I A se obtiene:
1( ) ( ) ( )s s U s−= −X I A B

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Sustituyendo este resultado en la ecuación de salida se tiene,
1( ) ( ) ( )Y s s U s−⎡ ⎤= − +⎣ ⎦C I A B D
De donde se obtiene la función de transferencia como:
1( )( ) ( )( )
Y sG s sU s
−= = − +C I A B D (3.55)
Ejemplo 3.24 Obtener la función de transferencia para el sistema del ejemplo 3.23, utilizando para ello los resultados obtenidos anteriormente. Solución: Usando la ecuación (3.55), se reemplazan los valores de , ,A B C y D para obtener la función de transferencia:
1( ) ( )G s s −= − +C I A B D
[ ]
10 1 00
( ) 1 0 010s
G s k bsm m m
−⎧ ⎫⎡ ⎤ ⎡ ⎤⎡ ⎤⎪ ⎪⎢ ⎥ ⎢ ⎥= − +⎨ ⎬⎢ ⎥ ⎢ ⎥ ⎢ ⎥− −⎣ ⎦⎪ ⎪⎣ ⎦ ⎣ ⎦⎩ ⎭
[ ]11 0
( ) 1 0 1s
G s k bsm m m
−−⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥+⎣ ⎦ ⎣ ⎦
Donde,
1
2
1 11
bs sm
k b b k ks s s sm m m m m
− ⎡ ⎤− +⎡ ⎤ ⎢ ⎥⎢ ⎥ = ⎢ ⎥⎢ ⎥+ ⎢ ⎥+ + −⎣ ⎦ ⎢ ⎥⎣ ⎦
Entonces,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ]2
011( ) 1 0 1
bsmG s b k ks s s mm m m
⎡ ⎤+ ⎡ ⎤⎢ ⎥ ⎢ ⎥= ⎢ ⎥ ⎢ ⎥⎢ ⎥+ + − ⎣ ⎦⎢ ⎥⎣ ⎦
2
1( )G sms bs k
=+ +
3. ECUACIONES DE ESTADO PARA SISTEMAS DISCRETOS La representación en espacio de estado de sistemas discretos se puede encontrar de forma muy similar a como se realizó con los sistemas continuos. Para sistemas de tiempo discreto, la ecuación de estado se pueden escribir como:
[ ]( 1) ( ), ( ),k k k k+ =x f x u (3.56) Y la ecuación de salida como:
[ ]( ) ( ), ( ),k k k k=y g x u (3.57) Para un sistema discreto lineal e invariante en el tiempo, la ecuación de estado y la ecuación de salida se escriben como:
En donde,
:G matriz de estados ( )n n×
:H matriz de entrada ( )n p×
:C matriz de salida ( )q n× :D matriz de transmitancia directa ( )q p×
Ecuación de estado
( 1) ( ) ( )k k k+ = +x Gx Hu (3.58)
Ecuación de salida
( ) ( ) ( )k k k= +y Cx Du (3.59)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
4. REPRESENTACIÓN EN EL ESPACIO DE ESTADOS Un sistema dinámico formado por una cantidad finita de elementos de parámetros concentrados se describe mediante una serie de ecuaciones diferenciales, en las cuales el tiempo es la variable independiente. Con la notación matricial, puede expresarse una ecuación diferencial de n-ésimo orden mediante una ecuación diferencial matricial de primer orden. Si n elementos del vector son un conjunto de variables de estado, la ecuación diferencial matricial es una ecuación de estado. En esta sección se presentan métodos para obtener representaciones en el espacio de estados de sistemas en tiempo continuo. En primer lugar, considere un sistema de n-ésimo orden en el cual la función de excitación no posee derivadas:
( ) ( 1)1 1
n nn ny a y a y a y u−−+ + + + =
En donde se definen n variables de estado, de la siguiente forma:
1
2
( 1)nn
x yx y
x y −
==
=
Lo cual permite reescribir la ecuación de n-ésimo orden como n ecuaciones diferenciales de primer orden, así:
1 2
2 3
1 2
1 1 2 1
n
n n n n
x xx x
x xx a x a x a x u
−
−
==
== − − − − +
O bien,
( )t u= +x Ax B

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En donde, 1
2
1n
n
xx
xx−
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
x
1 2 1
0 1 0 00 0 1 0
0 0 0 1
n n na a a a− −
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥− − − −⎣ ⎦
A
00
01
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
B
Y la salida se obtiene mediante,
[ ]
1
2
1
1 0 0 0
n
n
xx
yxx−
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
O bien,
y = Cx Donde,
[ ]1 0 0 0=C Ejemplo 3.25 Obtenga la representación en espacio de estado del sistema descrito mediante la siguiente ecuación diferencial de tercer orden:
3 2y y y u+ + = Solución: Para obtener la representación en el espacio de estado del sistema, primero se definen las variables de estado:
1
2
3
x yx yx y
===

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Derivando estas expresiones se obtiene:
1 2
2 3
3 3 23 2 3 2
x y xx y xx y y y u x x u
= == == = − − + = − − +
Ordenando estas relaciones se encuentra:
1 1 2 3
2 1 2 3
3 1 2 3
x x x x ux x x x ux x x x u
= + + += + + += − − +
0 1 0 00 0 1 00 2 3 1
Usando la representación matricial se obtiene:
1 1
2 2
3 3
x xx x ux x
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥= +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
0 1 0 00 0 1 00 -2 -3 1
[ ] [ ]1
2
3
xy x u
x
⎡ ⎤⎢ ⎥= +⎢ ⎥⎢ ⎥⎣ ⎦
1 0 0 0
Ahora, considere el sistema de n-ésimo orden, el cual involucra derivadas en la función de excitación:
( ) ( 1) ( ) ( 1)1 1 0 1 1
n n n nn n n ny a y a y a y b u b u b u b u− −− −+ + + + = + + + +
En este caso, se eligen las variables de estado de tal modo que se eliminen las derivadas de u en la ecuación de estado. Para obtener la ecuación de estado y la ecuación de salida, se definen las siguientes n variables como un conjunto de n variables de estado.
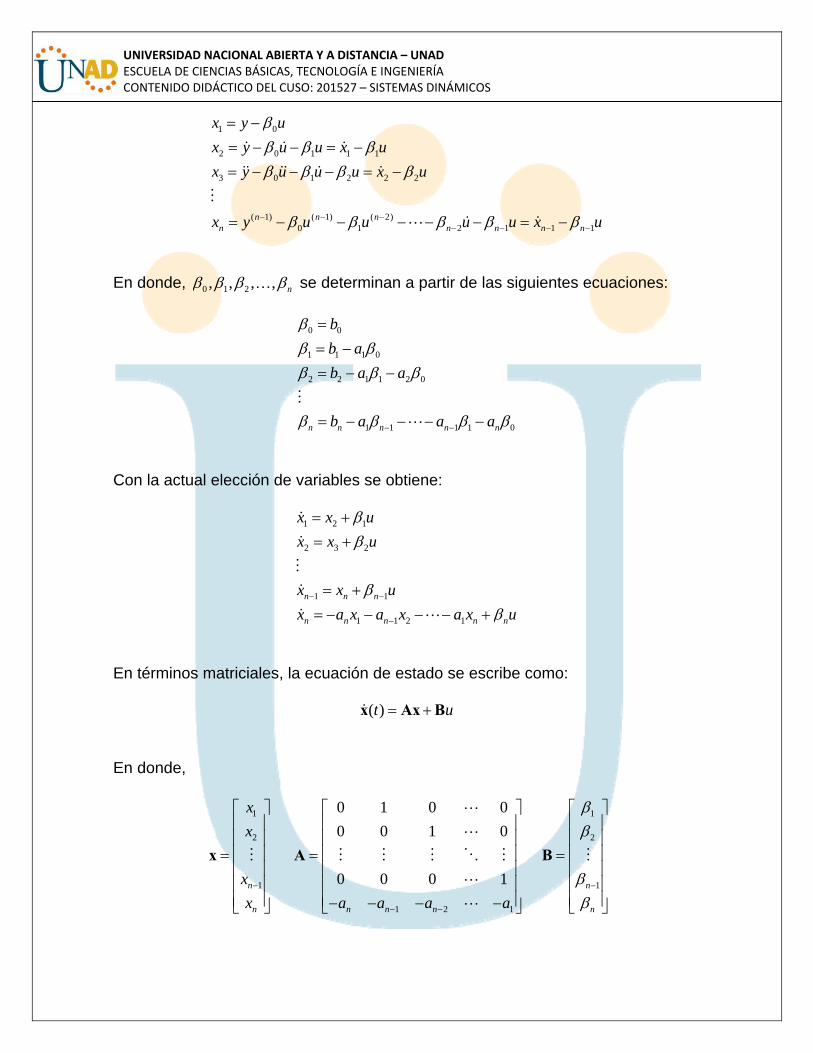
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1 0
2 0 1 1 1
3 0 1 2 2 2
( 1) ( 1) ( 2)0 1 2 1 1 1
n n nn n n n n
x y ux y u u x ux y u u u x u
x y u u u u x u
ββ β ββ β β β
β β β β β− − −− − − −
= −
= − − = −
= − − − = −
= − − − − − = −
En donde, 0 1 2, , , , nβ β β β… se determinan a partir de las siguientes ecuaciones:
0 0
1 1 1 0
2 2 1 1 2 0
1 1 1 1 0n n n n n
bb ab a a
b a a a
ββ ββ β β
β β β β− −
== −= − −
= − − − −
Con la actual elección de variables se obtiene:
1 2 1
2 3 2
1 1
1 1 2 1
n n n
n n n n n
x x ux x u
x x ux a x a x a x u
ββ
ββ
− −
−
= += +
= += − − − − +
En términos matriciales, la ecuación de estado se escribe como:
( )t u= +x Ax B En donde,
1
2
1n
n
xx
xx−
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
x
1 2 1
0 1 0 00 0 1 0
0 0 0 1
n n na a a a− −
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥− − − −⎣ ⎦
A
1
2
1n
n
ββ
ββ
−
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
B

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Y la salida se obtiene mediante,
[ ]
1
2
0
1
1 0 0 0
n
n
xx
y uxx
β
−
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥= +⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
O bien,
y u= +Cx D En donde,
[ ]1 0 0 0=C y 0β=D Ejemplo 3.26 Obtenga la representación en espacio de estado de un sistema de tiempo continuo modelado mediante la siguiente ecuación diferencial:
3 2 5y y y u u+ + = + Solución: Note que la función de entrada posee derivadas, y que la forma normalizada de la ecuación diferencial es la siguiente:
1 2 3 0 1 2 3y a y a y a y b u b u b u b u+ + + = + + + Comparando esta con la ecuación del sistema se observa que:
1 2 3
0 1 2 3
3; 2; 0;0; 0; 5; 1;
a a ab b b b= = == = = =
A continuación se encuentran los valores de β :
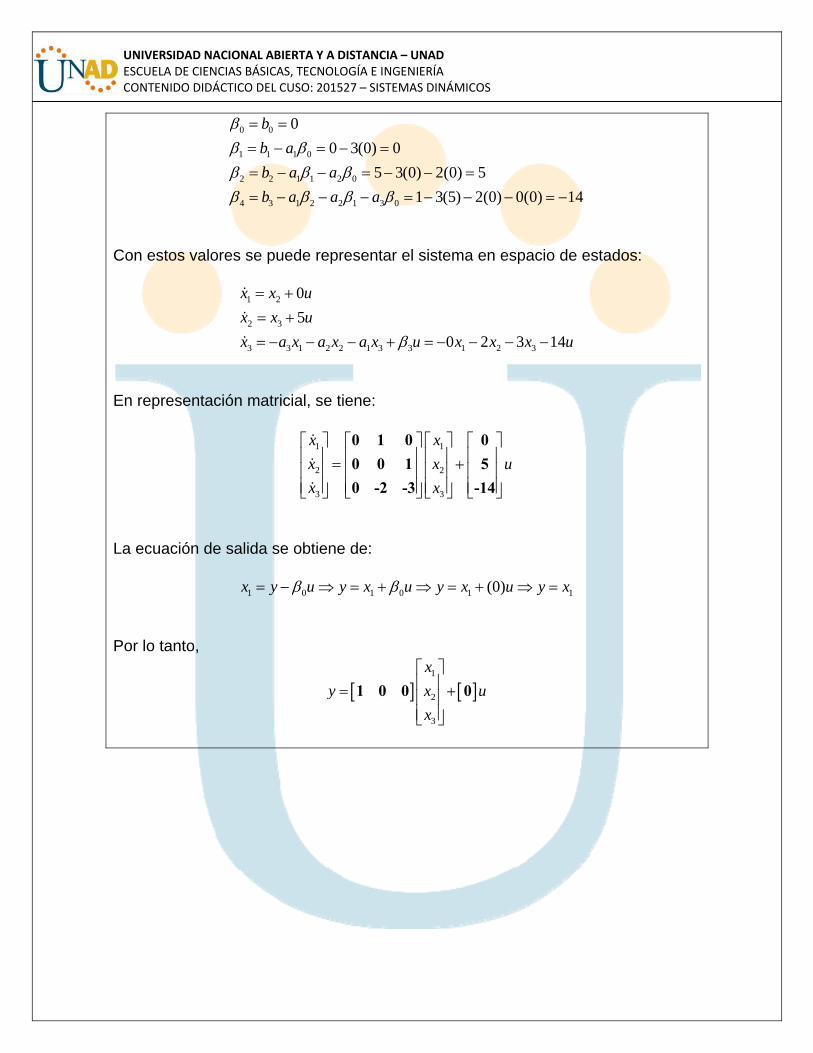
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
0 0
1 1 1 0
2 2 1 1 2 0
4 3 1 2 2 1 3 0
00 3(0) 0
5 3(0) 2(0) 51 3(5) 2(0) 0(0) 14
bb ab a ab a a a
ββ ββ β ββ β β β
= == − = − == − − = − − == − − − = − − − = −
Con estos valores se puede representar el sistema en espacio de estados:
1 2
2 3
3 3 1 2 2 1 3 3 1 2 3
05
0 2 3 14
x x ux x ux a x a x a x u x x x uβ
= += += − − − + = − − − −
En representación matricial, se tiene:
1 1
2 2
3 3
x xx x ux x
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥= +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦
0 1 0 00 0 1 50 -2 -3 -14
La ecuación de salida se obtiene de:
1 0 1 0 1 1(0)x y u y x u y x u y xβ β= − ⇒ = + ⇒ = + ⇒ = Por lo tanto,
[ ] [ ]1
2
3
xy x u
x
⎡ ⎤⎢ ⎥= +⎢ ⎥⎢ ⎥⎣ ⎦
1 0 0 0

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
ACTIVIDADES DE AUTOEVALUACIÓN DE LA UNIDAD 1 1. ¿Qué son los sistemas de control? ¿Cómo se pueden clasificar? 2. ¿Qué diferencia existe entre el control y la automatización? 3. ¿Qué elementos componen un sistema de control? Realice un ejemplo donde se evidencien todos ellos. 4. ¿Qué es un sensor? Mencione cinco ejemplos. 5. ¿Qué diferencias existen entre un sistema de control continuo y un sistema de control discreto? 6. Haga una lista de las principales ventajas y desventajas de los sistemas de control en lazo abierto. 7. Mencione dos ejemplos de sistemas de control en lazo abierto que se apliquen en su vida diaria. 8. Haga una lista de las principales ventajas y desventajas de los sistemas de control en lazo cerrado. 9. Mencione dos ejemplos de sistemas de control en lazo cerrado que se apliquen en su vida diaria. 10. ¿Qué tipos de métodos de control existen? Mencione dos ejemplos de cada uno.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
FUENTES DOCUMENTALES DE LA UNIDAD 1 DOCUMENTOS IMPRESOS DORF,Richard y BISHOP, Robert. Sistemas de control moderno. Décima edición. Madrid: Pearson Prentice-Hall, 2005. 882p. KUO, Benjamin. Sistemas de control automático. Séptima edición. México D.F.: Prentice-Hall Hispanoamericana S.A., 1996. 897p. OGATA, Katsuhiko. Ingeniería de control moderna. Tercera edición. México D.F.: Prentice-Hall Hispanoamericana S.A., 1998. 997p. OGATA, Katsuhiko. Sistemas de control en tiempo discreto. Segunda edición. México D.F.: Prentice-Hall Hispanoamericana S.A., 1996. 745p. SMITH, Carlos y CORRIPIO, Armando. Control automático de procesos: Teoría y práctica. México D.F.: Editorial Limusa S.A., 1991. 717p. DIRECCIONES DE SITIOS WEB DUARTE, Oscar. Programa universidad virtual (online), (Bogotá, Colombia), 2005 (visitado 30 de junio, 2009). http://www.virtual.unal.edu.co/cursos/ingenieria/2001619/index.html GUTIERREZ, Álvaro. Robolabo (online). (España), (visitado 30 de junio, 2009). http://138.100.21.254/labo/b_alumnos/curso_sist_control_2005/ Regents of University of Michigan. Tutoriales de control con MATLAB (online). (Michigan, USA), septiembre de 1997 (visitado 30 de junio, 2009). http://www.ib.cnea.gov.ar/~control2/Links/Tutorial_Matlab_esp/index.html SEGURA, Cristian. Introducción a señales, sistemas y control (online). (España), abril de 2007 (visitado 30 de junio, 2009). http://es.wikibooks.org/wiki/Introducci%C3%B3n_a_Se%C3%B1ales%2C_Sistemas_y_Control TORRES, Carmen y AGUILAR, José. Curso interactivo de sistemas de control (online). (Madrid, España), octubre de 2002 (visitado 30 de junio, 2009). http://www.dma.fi.upm.es/ctorres/Curso%2DInteractivo%2DControl/
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
UNIDAD 2
Nombre de la Unidad Análisis de los Sistemas Dinámicos
Introducción
La Unidad 2 trata los diferentes métodos de análisis que se utilizan en control, como son el análisis en el dominio del tiempo, el análisis en el dominio de la frecuencia, análisis mediante el lugar geométrico de las raíces y análisis en el espacio de estados.
Justificación
El estudiante de tecnología e ingeniería electrónica debe conocer la importancia que tiene el análisis de los sistemas dinámicos dentro de la ingeniería, ya que esto le permitirá enfrentar un sistema real, analizarlo para ver si es estable o inestable y obtener las bases para diseñar una solución que mejore su desempeño. En la Unidad 2 se presentan las herramientas matemáticas que le permiten al estudiante analizar plantas y sistemas de control lineales e invariantes en el tiempo, tanto continuo como discreto. Mediante el desarrollo de las lecciones propuestas se pretende concientizar a los estudiantes del propósito que tienen los sistemas de control desde el punto de vista del análisis y de las diferentes metodologías de análisis que permiten ver la estabilidad de los sistemas de control.
Intencionalidades Formativas
Capacitar a los estudiantes en la utilización de los métodos de análisis que le permitan interpretar el comportamiento y la respuesta de los diferentes sistemas dinámicos.
Denominación de Capítulos
• Capítulo 4: Análisis de la respuesta en el tiempo • Capítulo 5: Análisis de respuesta en frecuencia • Capítulo 6: Análisis del LGR y del espacio de estados

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1. CAPITULO 1: SISTEMAS DE CONTROL 2. CAPITULO 2: HERRAMIENTAS MATEMÁTICAS
3. CAPITULO 3: MODELADO DE SISTEMAS DINÁMICOS 4. CAPITULO 4: ANÁLISIS DE LA RESPUESTA EN EL TIEMPO
INTRODUCCIÓN La respuesta temporal de un sistema lineal invariante en el tiempo puede descomponerse en dos partes: la respuesta transitoria y la respuesta estacionaria. De este modo, si denominamos ( )c t a la expresión de la respuesta temporal:
( ) ( ) ( )t ssc t c t c t= + (4.1) Donde,
( ) :tc t Respuesta transitoria ( ) :ssc t Respuesta estacionaria
La respuesta transitoria es originada por la propia característica dinámica del sistema y determina el comportamiento del sistema durante la transición desde algún estado inicial hasta el estado final. La respuesta estacionaria depende fundamentalmente de la señal de excitación al sistema y, si el sistema es estable, es la respuesta que perdura cuando el tiempo crece infinitamente. De esta manera se logra determinar de un modo simple la estabilidad absoluta de un sistema; se dice que un sistema es estable si su respuesta transitoria decae a cero cuando el tiempo tiende a infinito. Además, se define el error en estado estacionario como la diferencia entre la señal de referencia y la señal realimentada en estado estacionario en sistemas estables. Este error coincide con el valor estacionario de la señal originada por el detector de error.
LEONARDO
Highlight
LEONARDO
Highlight
LEONARDO
Highlight
LEONARDO
Highlight

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Por otra parte, en sistemas de control, interesa minimizar la desviación de la señal de salida respecto a la señal de entrada en estado transitorio. Por esta razón se caracteriza la respuesta transitoria respecto a entradas típicas o estándares, conociendo que, como el sistema es lineal, la respuesta del sistema a señales más complejas es perfectamente predecible a partir del conocimiento de la respuesta a estas entradas de prueba más simples. Generalmente, las entradas típicas son: función impuso, función escalón, función rampa y función parabólica en el tiempo. Lección 1: SISTEMAS DE PRIMER ORDEN Un sistema de primer orden es aquel que únicamente posee un polo en su función de transferencia. Físicamente, este sistema representa un circuito RC, un sistema de nivel de líquido, un sistema térmico o algo similar. La figura 4.1 presenta este tipo de sistemas:
Figure 4.1 Sistema de primer orden. :T Constante de tiempo del sistema
Si a este sistema se aplica una entrada escalón, es decir ( ) 1R s s= , se obtiene la respuesta escalón del sistema:
1 1( )1
C sTs s
=+
Expandiendo en fracciones parciales, se tiene
1 1 1( )1 (1/ )
TC ss Ts s s T
= − = −+ +
Tomando la transformada inversa de Laplace de esta última expresión se obtiene:
/( ) 1 t Tc t e−= − (4.2)
LEONARDO
Highlight

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En donde 0t ≥ . Obsérvese que ( ) 1c t = cuando t tiende a infinito si >0T ; esto implica que el polo de la función de transferencia del sistema debe encontrarse en el semiplano izquierdo del plano s . Si 0T ≤ , el sistema no alcanza el estado estacionario, resultando el sistema inestable. Gráficamente:
Figure 4.2 Respuesta escalón de un sistema de primer orden
Observando la gráfica se comprueba que para t T= la señal de salida ha alcanzado el 63.2 % del valor final, siendo esta una medida típica en la caracterización de sistemas de primer orden. Para efectos prácticos, se considera que cuando han transcurrido por lo menos cuatro constantes de tiempo, la señal de salida ha alcanzado el valor final.
4 ( ) 0.982 ( ) 1sst T c t c t= → = ⇒ ≈ De este modo se deduce que entre más pequeña es la constante de tiempo de un sistema de primer orden más rápidamente alcanza el valor final. Si al mismo sistema se aplica una entrada rampa, es decir 2( ) 1R s s= , se obtiene la respuesta rampa del sistema:
2
1 1( )1
C sTs s
=+
HOGAR
Resaltado
HOGAR
Resaltado
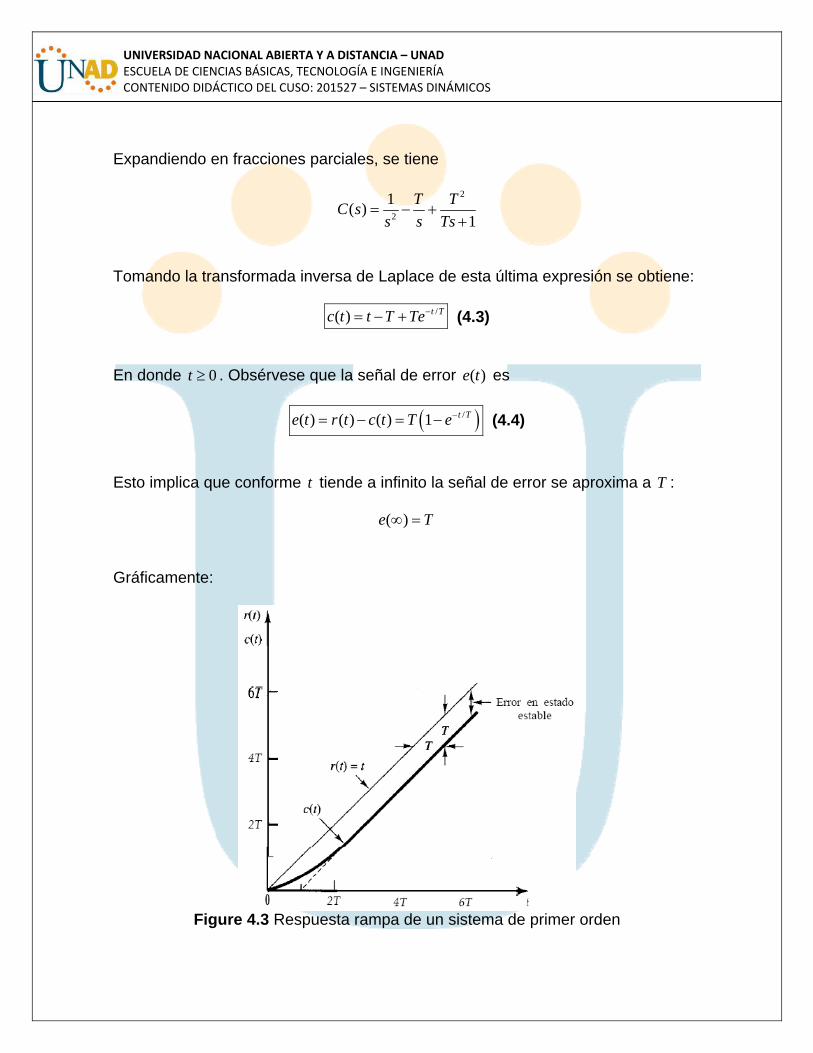
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Expandiendo en fracciones parciales, se tiene
2
2
1( )1
T TC ss s Ts
= − ++
Tomando la transformada inversa de Laplace de esta última expresión se obtiene:
/( ) t Tc t t T Te−= − + (4.3) En donde 0t ≥ . Obsérvese que la señal de error ( )e t es
( )/( ) ( ) ( ) 1 t Te t r t c t T e−= − = − (4.4) Esto implica que conforme t tiende a infinito la señal de error se aproxima a T :
( )e T∞ = Gráficamente:
Figure 4.3 Respuesta rampa de un sistema de primer orden
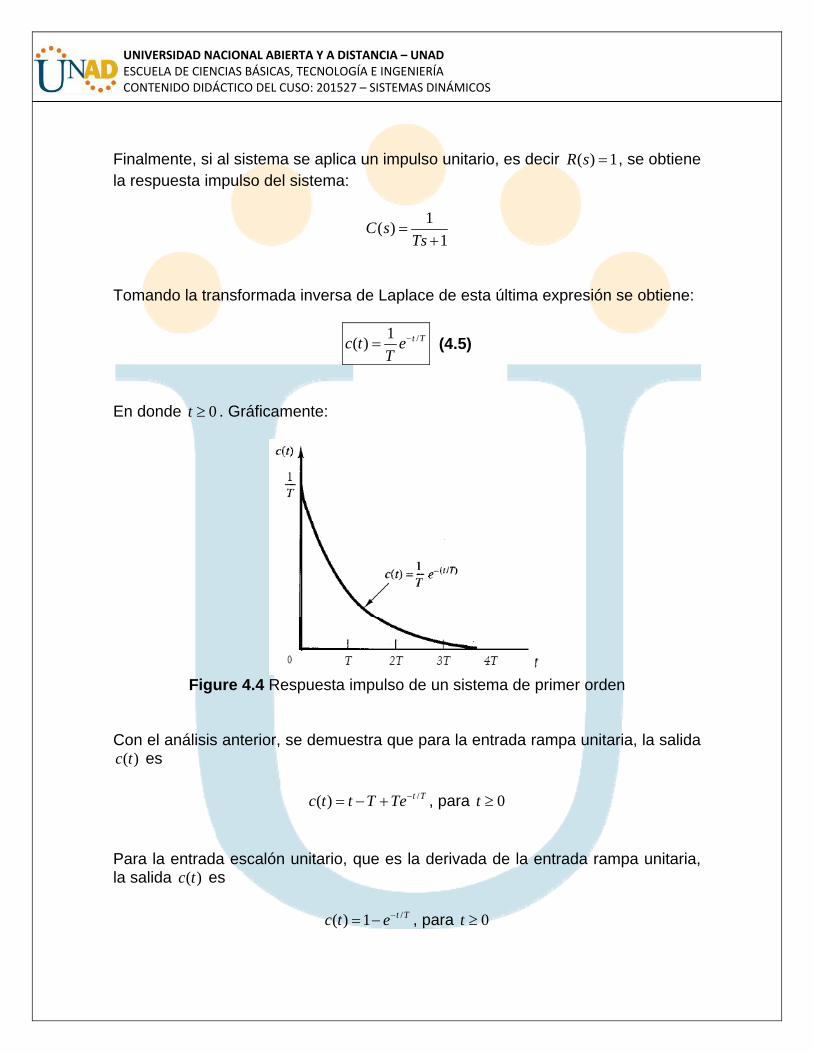
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Finalmente, si al sistema se aplica un impulso unitario, es decir ( ) 1R s = , se obtiene la respuesta impulso del sistema:
1( )1
C sTs
=+
Tomando la transformada inversa de Laplace de esta última expresión se obtiene:
/1( ) t Tc t eT
−= (4.5)
En donde 0t ≥ . Gráficamente:
Figure 4.4 Respuesta impulso de un sistema de primer orden
Con el análisis anterior, se demuestra que para la entrada rampa unitaria, la salida
( )c t es
/( ) t Tc t t T Te−= − + , para 0t ≥ Para la entrada escalón unitario, que es la derivada de la entrada rampa unitaria, la salida ( )c t es
/( ) 1 t Tc t e−= − , para 0t ≥

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Por último, para la entrada impulso unitario, que es la derivada de la entrada escalón unitario, la salida ( )c t es
/1( ) t Tc t eT
−= , para 0t ≥
Lección 2: SISTEMAS DE SEGUNDO ORDEN Un sistema de segundo orden se caracteriza por poseer dos polos en su función de transferencia. Estos sistemas se pueden representar mediante la siguiente función de transferencia normalizada:
2
2 2( )2
n
n n
G ss
ωζω ω
=+ +
(4.6)
En donde se define,
:ζ Factor de amortiguamiento :nω Frecuencia natural no amortiguada
Se observa pues, que los polos de un sistema de segundo orden vienen determinados por la expresión:
21,2 1n ns ζω ω ζ= − ± − (4.7)
En la figura 4.5 se puede apreciar la ubicación de los polos de la función de transferencia en función del valor de ζ .

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 4.5 Ubicación de los polos en función de ζ
Se observa entonces que: • Para 0ζ = , el sistema es oscilatorio, ya que 1,2 ns jω= ± . • Para 0< <1ζ , el sistema es subamortiguado, ya que 2
1,2 1n ns jζω ω ζ= − ± − , o también se puede escribir que 1,2 ds jσ ω= − ± .
• Para 1ζ = , el sistema es críticamente amortiguado, ya que 1,2 ns ω= − . • Para >1ζ , el sistema es sobreamortiguado, ya que 2
1,2 1n ns ζω ω ζ= − ± − . Así pues, al aplicar una entrada escalón unitario a este sistema de segundo orden se obtiene la siguiente respuesta en el tiempo:
2
2 2
1( )2
n
n n
C ss s
ωζω ω
=+ +
2
1( ) 1 sin( )1
ntdc t e tζω ω θ
ζ−= − +
− (4.8)
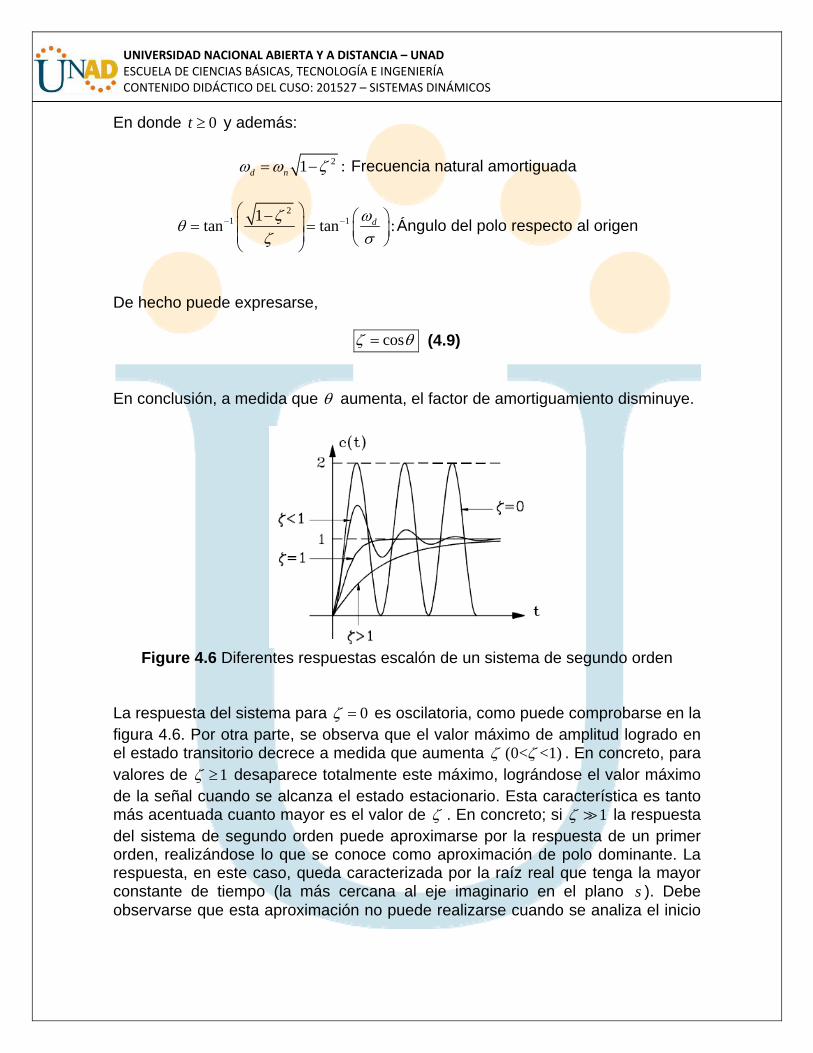
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En donde 0t ≥ y además:
21 :d nω ω ζ= − Frecuencia natural amortiguada
21 11
tan tan :dζ ωθζ σ
− −⎛ ⎞− ⎛ ⎞⎜ ⎟= = ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠
Ángulo del polo respecto al origen
De hecho puede expresarse,
cosζ θ= (4.9) En conclusión, a medida que θ aumenta, el factor de amortiguamiento disminuye.
Figure 4.6 Diferentes respuestas escalón de un sistema de segundo orden
La respuesta del sistema para 0ζ = es oscilatoria, como puede comprobarse en la figura 4.6. Por otra parte, se observa que el valor máximo de amplitud logrado en el estado transitorio decrece a medida que aumenta (0< <1)ζ ζ . En concreto, para valores de 1ζ ≥ desaparece totalmente este máximo, lográndose el valor máximo de la señal cuando se alcanza el estado estacionario. Esta característica es tanto más acentuada cuanto mayor es el valor de ζ . En concreto; si 1ζ la respuesta del sistema de segundo orden puede aproximarse por la respuesta de un primer orden, realizándose lo que se conoce como aproximación de polo dominante. La respuesta, en este caso, queda caracterizada por la raíz real que tenga la mayor constante de tiempo (la más cercana al eje imaginario en el plano s ). Debe observarse que esta aproximación no puede realizarse cuando se analiza el inicio

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
de respuesta, donde todavía perdura el efecto de la señal originada por la raíz no dominante. Generalmente, en la práctica, se especifican las características o especificaciones requeridas a un sistema de control en términos de cantidades en el dominio del tiempo. Estas cantidades vienen determinadas en términos de la respuesta transitoria frente a una entrada tipo escalón ( )u t . A esta respuesta se le denomina respuesta inicial. De este modo se caracteriza la dinámica de un sistema, aunque trabaje con otro tipo de entradas, a través de la dinámica requerida frente a una entrada escalón. El significado de los parámetros definidos en la caracterización de la respuesta inicial determina la forma de la respuesta transitoria de un sistema. En la figura 4.7 puede observarse la respuesta típica de un sistema frente a una entrada escalón.
Figure 4.7 Especificaciones para un sistema con respuesta subamortiguada
• Tiempo de retardo dt : Tiempo que tarda la respuesta en alcanzar el 50% del
valor final.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Tiempo de subida rt : En sistemas subamortiguados es el tiempo que tarda la respuesta en alcanzar el 100% del valor final; para sistemas sobreamortiguados se define como el tiempo que tarda la respuesta en pasar del 10% al 90% del valor final.
En términos de ζ y nω se puede calcular el tiempo de subida, mediante la siguiente expresión:
21
2 2
11 tan1 1
rdn n
tζ π θ π θ
ζ ωω ζ ω ζ−⎛ ⎞− − −⎜ ⎟= − = =⎜ ⎟− −⎝ ⎠
(4.10)
En donde θ corresponde al ángulo que forma el polo respecto al origen. En el caso de poseer raíces imaginarias puras ( 0)ζ = , el tiempo de subida coincide con un cuarto del periodo de señal ( 2 )r nt π ω= ; a su vez, cuando las raíces son reales ( 1)ζ = , el sistema tiene una característica de amortiguamiento crítico y el tiempo de subida, según la expresión anterior, es infinito, lo que conlleva la necesidad de variar su definición. • Tiempo de pico pt : Es el tiempo que tarda la respuesta en alcanzar el primer
máximo. Sólo existe en sistemas subamortiguados. En términos de ζ y nω se puede calcular el tiempo de pico, mediante la siguiente expresión:
21p
dn
t π πωω ζ
= =−
(4.11)
De este modo, a medida que aumente la parte imaginaria de los polos del sistema, el tiempo de pico disminuirá. • Máximo sobreimpulso pM : Es el valor de pico máximo de la curva de
respuesta ponderado por el valor final obtenido.
( ) ( )(%) 100(%)
( )p
p
c t cM
c− ∞
= ×∞

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
El máximo sobreimpulso es un parámetro indicativo de la “estabilidad relativa” del sistema. En términos de ζ y nω se puede calcular sobreimpulso máximo, mediante la siguiente expresión:
21 dpM e e
πζπσ
ζ ω−
−−= = (4.12)
Observando la expresión anterior puede trazarse una gráfica que relacione pM en función de ζ :
Figure 4.8 pM en función de ζ
De hecho, cuanto mayor es ζ , menor es el máximo sobreimpulso obtenido en la respuesta transitoria. Expresado de otro modo, cuanto mayor es el ángulo que forma el polo del sistema respecto al eje real mayor es el sobreimpulso de la respuesta. En conclusión, el aumento de la parte real (en valor absoluto) o la disminución de la parte imaginaria de las raíces conlleva la reducción del pM . De la figura 4.8 se puede observar que para >0.6ζ el pM es menor al 10%. • Tiempo de establecimiento st : Es el tiempo requerido por la curva de
respuesta para alcanzar y mantenerse dentro de determinado rango (habitualmente 5% o 2%) del valor final. Generalmente está relacionado con las constantes de tiempo más grandes del sistema.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Para determinar las expresiones del tiempo de establecimiento en un sistema subamortiguado, se considera que la respuesta queda comprendida entre envolventes, que permiten aproximar el tiempo de establecimiento en función de la parte real de los polos del sistema. Así, considerando los errores:
3 35%
4 42%
sn
sn
t
t
ζω σ
ζω σ
⇒ ≈ =
⇒ ≈ = (4.13)
El tiempo de establecimiento es inversamente proporcional a la parte real (en valor absoluto) de las raíces del sistema subamortiguado.
Figure 4.9 Curvas envolventes de la respuesta paso
En la figura 4.10 se presentan gráficas de las respuestas temporales al escalón unitario para tres sistemas de segundo orden con diferentes posiciones de polos en el plano s . En estas figuras se pueden verificar, mediante las expresiones anteriores, las relaciones entre las posiciones de los polos y las características temporales de tiempo de subida, tiempo de pico, máximo sobreimpulso y tiempo de establecimiento.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 4.10 Respuestas al escalón de sistemas de segundo orden
Idealmente interesará lograr siempre sistemas de control que minimicen el máximo sobreimpulso y los tiempos de respuesta transitoria, manteniendo la máxima precisión posible. Ejemplo 4.1 Obtenga el tiempo de subida, el tiempo de pico, el sobreimpulso máximo y el tiempo de establecimiento, para un sistema de segundo orden, en el que 0.6ζ = y 5 rad/segnω = , cuando el sistema está sujeto a una entrada escalón unitario. Solución: A partir de los valores dados de ζ y nω , se obtiene 21 4p nω ω ζ= − = y
3nσ ζω= = . El tiempo de subida es:
3.144r
d
t π θ θω− −
= =

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En donde θ se obtiene mediante
1 1 4tan tan 0.93 rad3
dωθσ
− −⎛ ⎞ ⎛ ⎞= = =⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
Por tanto, el tiempo de subida es:
3.14 0.93 0.55 seg4rt−
= =
El tiempo de pico es:
3.14 0.785 seg4p
d
t πω
= = =
El sobreimpulso máximo es:
(3.14)(3)4 0.095d
pM e eπσ
ω− −
= = = Por tanto, el porcentaje de sobrepaso máximo es 9.5%. Para el criterio del 2%, el tiempo de establecimiento es:
4 4 1.33 seg3st σ
= = =
Para el criterio del 5%:
3 3 1 seg3st σ
= = =
Lección 3: SISTEMAS DE ORDEN SUPERIOR Un sistema de orden superior (supuesto estable) puede caracterizarse mediante una función de transferencia, que admite una expresión de la respuesta a una entrada escalón unitario de la forma:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1 1
2 2 2 2
1 1 1 1
( ) ( )( ) 1( )( ) ( ) ( 2 ) ( ) ( 2 )
m m
i ii i
p pr r
j k k k j k k kj k j k
K s z K s zC s C sR s ss p s s s p s sζ ω ω ζ ω ω
= =
= = = =
+ += → =
+ + + + + +
∏ ∏
∏ ∏ ∏ ∏
Desarrollando en fracciones parciales y aplicando la transformada inversa de Laplace:
1 1( ) ( ) cos( ) sin( )j k k k k
q rp t t t
j k dk k dkj k
c t au t a e b e t c e tζ ω ζ ωω ω− − −
= =
⎡ ⎤= + + +⎣ ⎦∑ ∑ (4.14)
En la expresión aparecen términos que dependen de la parte real de los polos. Dos consideraciones permiten aproximar la dinámica de un sistema de orden superior por la dinámica de un sistema de primer o segundo orden. 1. CANCELACIÓN CERO-POLO Se basa en el análisis resultante en la determinación del valor de los residuos cuando el polo se encuentra cercano a un cero; en este caso, puede expresarse
i iz p ε= + , donde 0ε → . El cálculo del residuo resulta:
1
2 2
1 1
( )lim ( )
( ) ( 2 )i
m
hh
i iq rs p
j k k kj k
K s za s p
s s p s sζ ω ω
=
→−
= =
+= +
+ + +
∏
∏ ∏
1
11
2 2
1 1
( )lim
( ) ( 2 )i
m
hh
i q rs p
j k k kj k
K s za
s s p s sε
ζ ω ω
−
=−→−
= =
+=
+ + +
∏
∏ ∏
En la segunda expresión no existen los términos ( )is z+ en el numerador ni ( )is p+ en el denominador. En conclusión, en el caso en el cual el polo y el cero se encuentren muy cercanos 0 0iaε → ⇒ → , perdiendo importancia el término exponencial de la respuesta transitoria originado por este polo frente al resto de
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
términos de la respuesta total. De este modo puede simplificarse en un orden la dinámica del sistema. Debe considerarse que se obtienen resultados análogos en el caso de poseer ceros complejos conjugados cercanos a polos complejos conjugados, lo cual permite generalizar esta aproximación a cualquier tipo de sistemas de orden superior. 2. APROXIMACIÓN DE POLOS DOMINANTES Los polos más alejados del eje imaginario poseen constantes de tiempo menores (sean o no reales, en el caso de raíces complejas conjugadas existe una dependencia respecto a su parte real), de manera que puede afirmarse que las exponenciales debidas a estos polos son importantes en el inicio de la respuesta transitoria, pero que decaen a cero mucho más rápidamente que las exponenciales debidas a raíces con constantes de tiempo mayores. Son estas últimas las que caracterizan plenamente la respuesta transitoria (exceptuando en el origen de la respuesta) y permiten reducir el orden del sistema; se dice en este caso que “dominan” la respuesta del sistema, despreciándose el efecto de las raíces con parte real mayor (en valor absoluto). Lección 4: ERROR EN ESTADO ESTACIONARIO Un sistema lineal estable alcanza el régimen o estado estacionario cuando, al ser excitado por una señal de entrada, la respuesta transitoria decae a cero. En sistemas de control, la precisión o exactitud del sistema se convierte en una de las especificaciones más importantes que verificar; el sistema de control debe “seguir” la señal de referencia en estado estacionario del modo más preciso posible. Por esta razón, en sistemas de control en lazo cerrado se obtienen las expresiones de los errores estacionarios del sistema en función del tipo de señal de referencia introducida y de las funciones de transferencia que contiene. Los sistemas de control se clasifican de acuerdo con su capacidad de seguir entradas escalón, rampa, parábola, etc. Éste es un esquema de clasificación razonable, porque las entradas reales con frecuencia se consideran combinaciones de las entradas mencionadas. Las magnitudes de los errores en estado estable producidos por estas entradas individuales indican la bondad del sistema.
HOGAR
Resaltado
HOGAR
Resaltado

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Considere el sistema de control con realimentación unitaria con la siguiente función de transferencia en lazo abierto ( )G s :
1 2
( 1)( 1) ( 1)( )( 1)( 1) ( 1)
a b mN
p
K T s T s T sG ss T s T s T s
+ + +=
+ + + (4.15)
Este sistema contiene el término Ns en el denominador, que representa un polo de multiplicidad N en el origen. El esquema de clasificación actual se basa en la cantidad de integraciones indicadas por la función de transferencia en lazo abierto. Un sistema se denomina de tipo 0, de tipo 1, de tipo 2,… si 0, 1, 2,...N N N= = = , respectivamente. Tome en cuenta que esta clasificación es diferente de la que se basa en el orden del sistema. Conforme el número del tipo es mayor, mejora la precisión; sin embargo, aumentar el número del tipo agrava el problema de la estabilidad. Siempre es necesario un equilibrio entre la precisión en estado estable y la estabilidad relativa. En la práctica, es muy raro tener sistemas de tipo 3 o superiores, pues, por lo general, resulta difícil diseñar sistemas estables que tengan, dos o más integradores en la trayectoria directa. Así pues, si ( )G s se escribe para que cada término del numerador y del denominador, excepto el término Ns , tienden a la unidad, conforme s tiende a cero, entonces la ganancia en lazo abierto K está directamente relacionada con el error en estado estable. Analizando el diagrama de bloques de un sistema en lazo cerrado se obtiene la señal de error como:
( )( )1 ( )LA
R sE sG s
=+
(4.16)
Donde,
( ) :LAG s Función de transferencia del sistema en lazo abierto
Se define, entonces el error en estado estacionario:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
0 0
( )lim ( ) lim ( ) lim1 ( )ss t s s
LA
sR se e t sE sG s→∞ → →
= = =+
(4.17)
Particularizando para los diversos tipos de entradas se pueden obtener los errores de posición, de velocidad y de aceleración: • Error en estado estacionario de posición:
1( ) ( )1ssp
p
r t u t eK
= → =+
(4.18)
0lim ( ) coeficiente de posiciónp LAs
K G s→
= → (4.19)
• Error en estado estacionario de velocidad:
1( ) ssvv
r t t eK
= → = (4.20)
0lim ( ) coeficiente de velocidadv LAs
K sG s→
= → (4.21)
• Error en estado estacionario de aceleración:
2 1( )2 ssa
a
tr t eK
= → = (4.22)
2
0lim ( ) coeficiente de aceleracióna LAs
K s G s→
= → (4.23)
Obsérvese que, entre mayores son los coeficientes de error, menor es el error estacionario cometido. El error en estado estacionario en lazo cerrado puede obtenerse a partir de la función de transferencia en lazo abierto, de modo que, cuanto mayor es su valor en continua (para frecuencia cero) menor es el error cometido. Para poder eliminar el error de posición es necesario que la función de transferencia en lazo abierto contenga un polo en origen; en este caso se dice que existe un elemento integrador en dicha función.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Por último, hay señalar que este error estacionario no es más que el valor que adquiere la señal de salida del detector de error en estado estacionario. En el caso en el cual la realimentación fuese unitaria, coincidiría con la diferencia que se tendría en estado estacionario entre la señal de referencia y la señal de salida del sistema. Si la realimentación no es unitaria, existirá un factor de proporcionalidad entre ambas señales que vendrá determinado por el elemento de medida. Las expresiones de los errores estacionarios de un sistema de control discreto en lazo cerrado se presentan a continuación. Análogamente al caso anterior la señal de error es:
( )( )1 ( )LA
R zE zG z
=+
(4.24)
Donde,
( ) :LAG z Función de transferencia del sistema discreto en lazo abierto
Se define, entonces el error en estado estacionario:
11
1 1
(1 ) ( )lim ( ) lim(1 ) ( ) lim1 ( )ss k z z
LA
z R ze e kT z E zG z
−−
→∞ → →
−= = − =
+ (4.25)
Particularizando para los diversos tipos de entradas, se pueden obtener los errores de posición, velocidad y aceleración, de manera muy similar al caso continuo. • Error en estado estacionario de posición:
1( ) ( )1ssp
p
r t u t eK
= → =+
(4.26)
1lim ( ) coeficiente de posiciónp LAz
K G z→
= → (4.27)
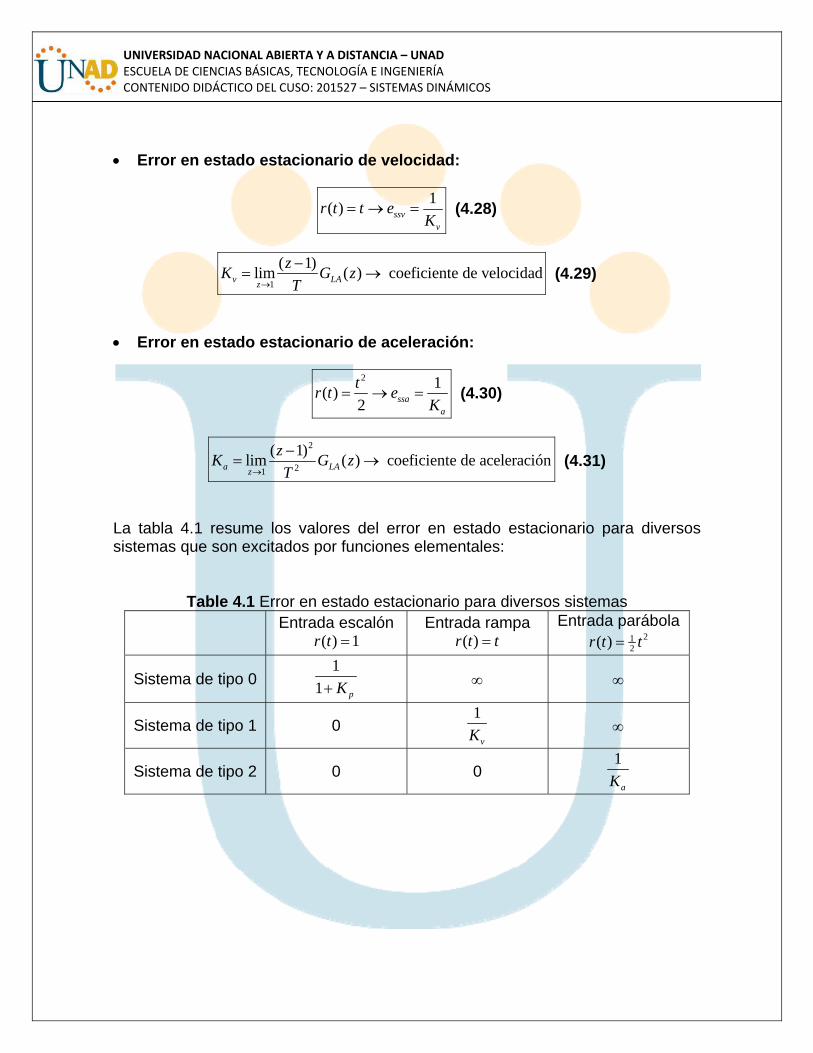
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Error en estado estacionario de velocidad:
1( ) ssvv
r t t eK
= → = (4.28)
1
( 1)lim ( ) coeficiente de velocidadv LAz
zK G zT→
−= → (4.29)
• Error en estado estacionario de aceleración:
2 1( )2 ssa
a
tr t eK
= → = (4.30)
2
21
( 1)lim ( ) coeficiente de aceleracióna LAz
zK G zT→
−= → (4.31)
La tabla 4.1 resume los valores del error en estado estacionario para diversos sistemas que son excitados por funciones elementales:
Table 4.1 Error en estado estacionario para diversos sistemas
Entrada escalón ( ) 1r t =
Entrada rampa ( )r t t=
Entrada parábola 21
2( )r t t=
Sistema de tipo 0 1
1 pK+ ∞ ∞
Sistema de tipo 1 0 1
vK ∞
Sistema de tipo 2 0 0 1
aK
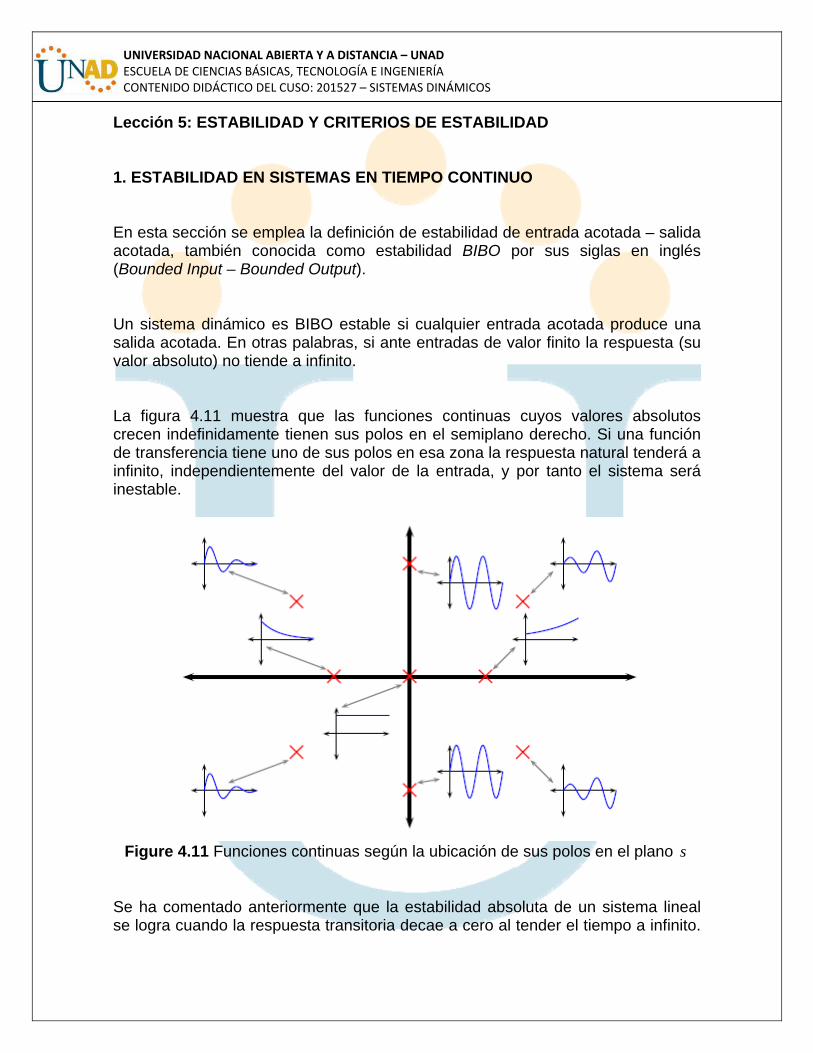
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Lección 5: ESTABILIDAD Y CRITERIOS DE ESTABILIDAD 1. ESTABILIDAD EN SISTEMAS EN TIEMPO CONTINUO En esta sección se emplea la definición de estabilidad de entrada acotada – salida acotada, también conocida como estabilidad BIBO por sus siglas en inglés (Bounded Input – Bounded Output). Un sistema dinámico es BIBO estable si cualquier entrada acotada produce una salida acotada. En otras palabras, si ante entradas de valor finito la respuesta (su valor absoluto) no tiende a infinito. La figura 4.11 muestra que las funciones continuas cuyos valores absolutos crecen indefinidamente tienen sus polos en el semiplano derecho. Si una función de transferencia tiene uno de sus polos en esa zona la respuesta natural tenderá a infinito, independientemente del valor de la entrada, y por tanto el sistema será inestable.
Figure 4.11 Funciones continuas según la ubicación de sus polos en el plano s
Se ha comentado anteriormente que la estabilidad absoluta de un sistema lineal se logra cuando la respuesta transitoria decae a cero al tender el tiempo a infinito.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Se puede demostrar que para que un sistema lineal sea estable es necesario que posea todos los polos de su función de transferencia en el semiplano izquierdo del plano transformado s . En sistemas de control, el problema fundamental es la determinación de las raíces del sistema en Lazo Cerrado a partir del conocimiento de las raíces en Lazo Abierto. Recordando la expresión de la función de transferencia en Lazo Cerrado.
Figure 4.12 Estructura de un sistema de control en lazo cerrado
( ) ( )( )( )( ) 1 ( ) ( ) ( )
cLC
c
G s G sC sG sR s G s G s H s
= =+
(4.32)
La ecuación característica del sistema en Lazo Cerrado 1 ( ) ( ) ( ) 0cG s G s H s+ = no es fácilmente resoluble en general; por ello aparecen métodos algorítmicos para poder determinar la estabilidad de un sistema en lazo cerrado, el más importante de estos métodos es el criterio de estabilidad de Routh Hurwitz. El criterio de estabilidad de Routh Hurwitz permite determinar el número de raíces de una ecuación de variable compleja que se encuentran en el semiplano derecho, utilizándose, de este modo, para determinar si existen polos de una función de transferencia en el semiplano derecho del plano transformado s . Criterio de estabilidad de Routh Hurwitz: El criterio de estabilidad de Routh Hurwitz es un criterio de estabilidad absoluta. Se basa en la determinación del número de raíces de un polinomio que se encuentran en el semiplano derecho del plano s . Para su aplicación deben verificarse dos condiciones:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• Condición necesaria: Dada la función de transferencia,
10 1 1
10 1 1
( )( )
m mm m
n nn n
b s b s b s bC sR s a s a s a s a
−−
−−
+ + + +=
+ + + +
Debe escribirse el denominador de la forma 1
0 1 1 0n nn na s a s a s a−−+ + + + = , con
0na ≠ (se eliminan las raíces en el eje imaginario). Si existe algún coeficiente negativo o cero en presencia de algún coeficiente positivo, entonces existen una o más raíces imaginarias puras o con parte real positiva, lo cual implica que el sistema es inestable. En otros términos, para garantizar estabilidad, a partir del primer 0ia ≠ todos los coeficientes deben estar presentes y ser positivos. • Condición suficiente: Debe aplicarse el algoritmo de formación siguiente:
1
0 1 1 0n nn na s a s a s a−−+ + + + =
0 2 4 6
11 3 5 7
21 2 3 4
31 2 3 4
21 2
11
01
n
n
n
n
s a a a as a a a as b b b bs c c c c
s e es fs g
−
−
−
Las primeras filas se obtienen directamente del polinomio característico, el resto de coeficientes se obtienen según las expresiones:
1 2 0 3 1 4 0 5 1 6 0 71 2 3
1 1 1
; ;a a a a a a a a a a a ab b ba a a− − −
= = =

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1 3 1 2 1 5 1 3 1 7 1 41 2 3
1 1 1
; ;b a a b b a a b b a a bc c cb b a− − −
= = =
Como observación debe indicarse que puede multiplicarse o dividirse toda una fila por una constante positiva. El criterio de estabilidad de Routh Hurwitz determina que el número de raíces con parte real positiva del polinomio estudiado es igual al número de cambios de signo de la primera columna del algoritmo de formación. De este modo la condición necesaria y suficiente para que un sistema sea estable es: • Todos los coeficientes del polinomio característico deben existir y ser positivos. • Todos los coeficientes de la primera columna del algoritmo de formación deben
de ser positivos. Ejemplo 4.2 Determine la estabilidad de un sistema que posee la siguiente ecuación característica de tercer orden, aplicando el criterio de estabilidad de Routh Hurwitz:
3 20 1 2 3 0a s a s a s a+ + + =
Solución: Se verifica la condición necesaria: 0 1 2 3, , , >0a a a a Verificando la condición suficiente, se obtiene:
30 2
21 3
1 1 2 0 3
10
3
s a as a a
a a a asa
s a
−

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Para que no existan cambios de signo en la primera columna 1 2 0 3 >0a a a a− Ejemplo 4.3 Determine la estabilidad de un sistema que posee la siguiente ecuación característica, aplicando el criterio de estabilidad de Routh Hurwitz:
4 3 22 3 4 5 0s s s s+ + + + = Solución: Se verifica la condición necesaria, y verificando la condición suficiente, se obtiene:
4
3
2
1
0
1 3 52 41 56
5
sssss
−
Se observan dos cambios de signo en la primera columna, lo cual indica dos raíces con parte real positiva, volviendo el sistema inestable. Si un término de la primera columna es cero en presencia de otros diferentes de cero: Cuando esta situación ocurre, puede afirmarse que el sistema es inestable. Para determinar la ubicación de las raíces que proporcionan la inestabilidad debe realizarse el siguiente procedimiento: • Sustituir el cero por >0ε con 1ε . • Aplicar el procedimiento habitual. • Aplicar el criterio: Si los coeficientes superior e inferior a ε son de igual signo,
entonces existen raíces sobre el eje imaginario; si los coeficientes superior e inferior tienen signo diferente, entonces existen raíces en el semiplano derecho.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Ejemplo 4.4 Determine la estabilidad de un sistema que posee la siguiente ecuación característica, aplicando el criterio de estabilidad de Routh Hurwitz:
3 22 2 0s s s+ + + = Solución: Se verifica la condición necesaria, y verificando la condición suficiente, se obtiene:
3
2
1
0
1 12 2
02
ssss
ε≈
Como no hay cambios de signo, entonces deben existir raíces en el eje imaginario. Ejemplo 4.5 Determine la estabilidad de un sistema que posee la siguiente ecuación característica, aplicando el criterio de estabilidad de Routh Hurwitz:
3 3 2 0s s− + = Solución: No se verifica la condición necesaria por lo que el sistema es inestable, y verificando la condición suficiente, se obtiene:
3
2
1
0
1 30 2
23
2
ss
s
s
ε
ε
−≈
− −
Existen dos cambios de signo, entonces deben existir dos raíces con parte real positiva.
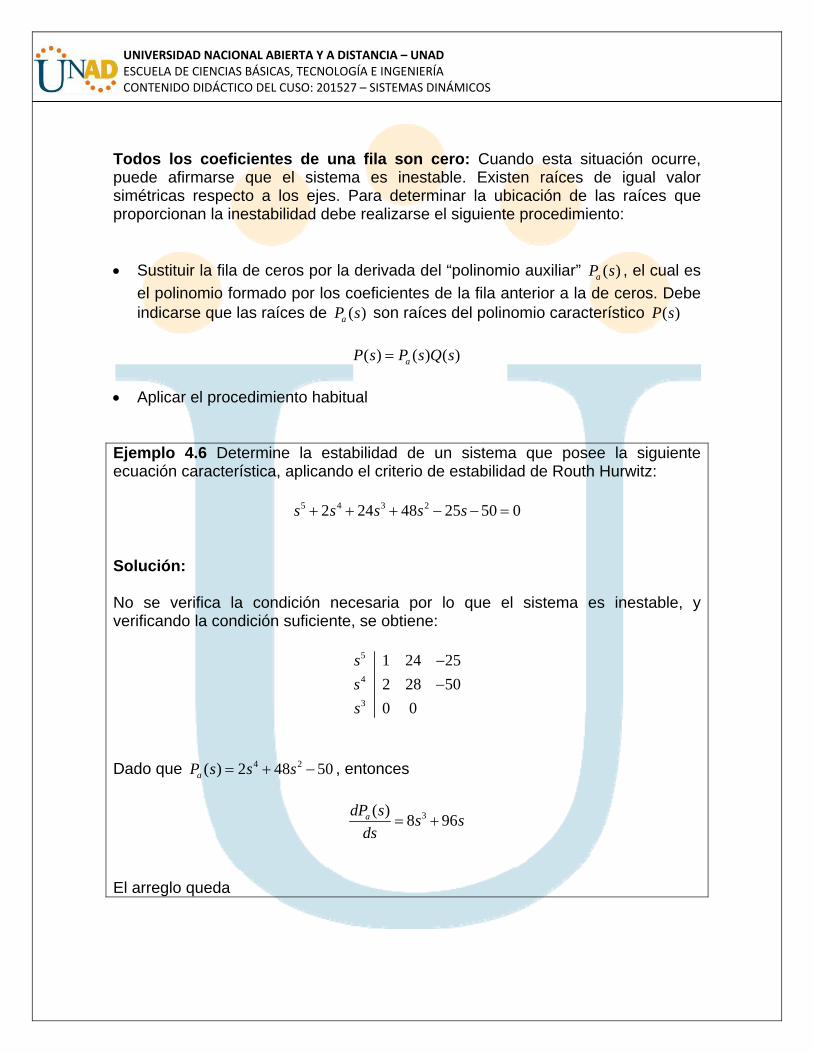
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Todos los coeficientes de una fila son cero: Cuando esta situación ocurre, puede afirmarse que el sistema es inestable. Existen raíces de igual valor simétricas respecto a los ejes. Para determinar la ubicación de las raíces que proporcionan la inestabilidad debe realizarse el siguiente procedimiento: • Sustituir la fila de ceros por la derivada del “polinomio auxiliar” ( )aP s , el cual es
el polinomio formado por los coeficientes de la fila anterior a la de ceros. Debe indicarse que las raíces de ( )aP s son raíces del polinomio característico ( )P s
( ) ( ) ( )aP s P s Q s=
• Aplicar el procedimiento habitual Ejemplo 4.6 Determine la estabilidad de un sistema que posee la siguiente ecuación característica, aplicando el criterio de estabilidad de Routh Hurwitz:
5 4 3 22 24 48 25 50 0s s s s s+ + + − − = Solución: No se verifica la condición necesaria por lo que el sistema es inestable, y verificando la condición suficiente, se obtiene:
5
4
3
1 24 252 28 500 0
sss
−−
Dado que 4 2( ) 2 48 50aP s s s= + − , entonces
3( ) 8 96adP s s sds
= +
El arreglo queda
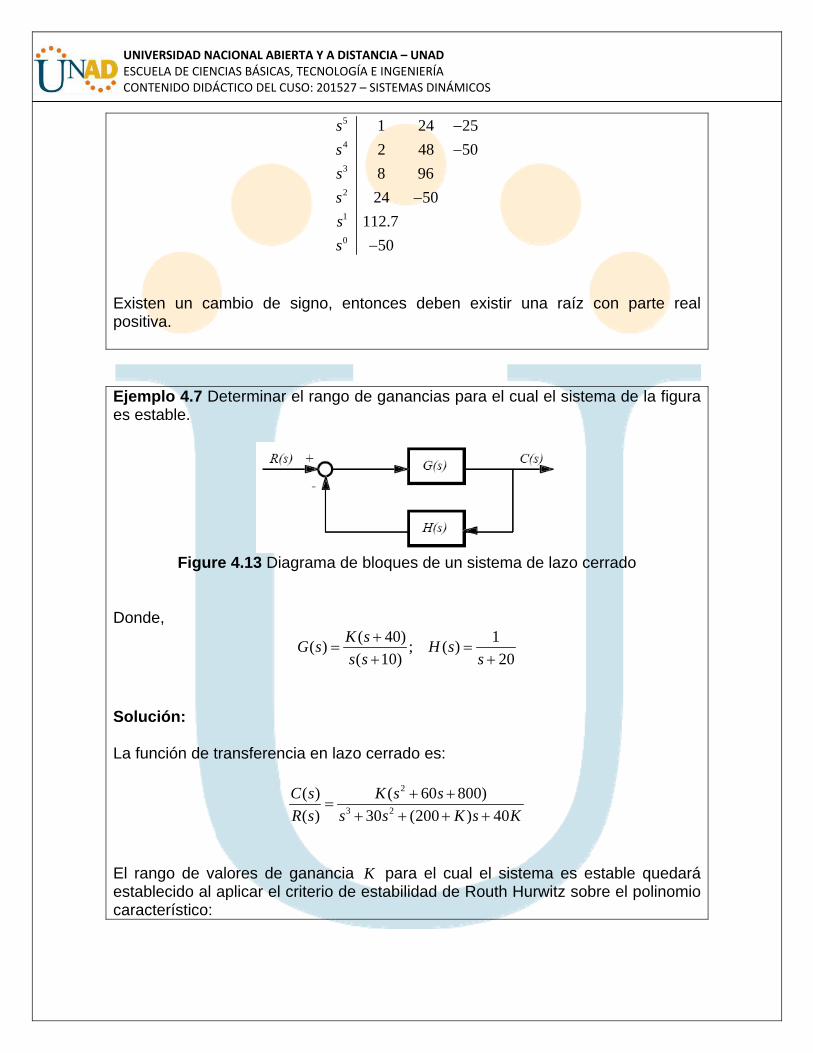
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
5
4
3
2
1
0
1 24 252 48 508 9624 50
112.750
ssssss
−−
−
−
Existen un cambio de signo, entonces deben existir una raíz con parte real positiva. Ejemplo 4.7 Determinar el rango de ganancias para el cual el sistema de la figura es estable.
Figure 4.13 Diagrama de bloques de un sistema de lazo cerrado
Donde,
( 40) 1( ) ; ( )( 10) 20
K sG s H ss s s
+= =
+ +
Solución: La función de transferencia en lazo cerrado es:
2
3 2
( ) ( 60 800)( ) 30 (200 ) 40
C s K s sR s s s K s K
+ +=
+ + + +
El rango de valores de ganancia K para el cual el sistema es estable quedará establecido al aplicar el criterio de estabilidad de Routh Hurwitz sobre el polinomio característico:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
3 230 (200 ) 40 0s s K s K+ + + + = Se verifica la condición necesaria para valores de K positiva, y verificando la condición suficiente, se obtiene:
3
2
1
0
1 20030 40
(30)(200) 1030
40
s Ks K
Ks
s K
+
−
El rango de valores de K para los que permanece el sistema estable es 0<K<600 . Para 600K = el sistema se encuentra sobre la estabilidad límite siendo oscilatorio; puede determinarse la frecuencia de oscilación calculando las raíces imaginarias que la caracterizan. 2. ESTABILIDAD EN SISTEMAS DE TIEMPO DISCRETO Se puede demostrar que un sistema discreto es estable cuando posee todos los polos de su función de transferencia en el interior del círculo de radio uno en el plano transformado z . La figura 4.14 muestra que las funciones discretas cuyos valores absolutos crecen indefinidamente tienen sus polos por fuera del círculo unitario. Si una función de transferencia tiene uno de sus polos en esa zona la respuesta natural tenderá a infinito, independientemente del valor de la entrada, y por tanto el sistema será inestable.
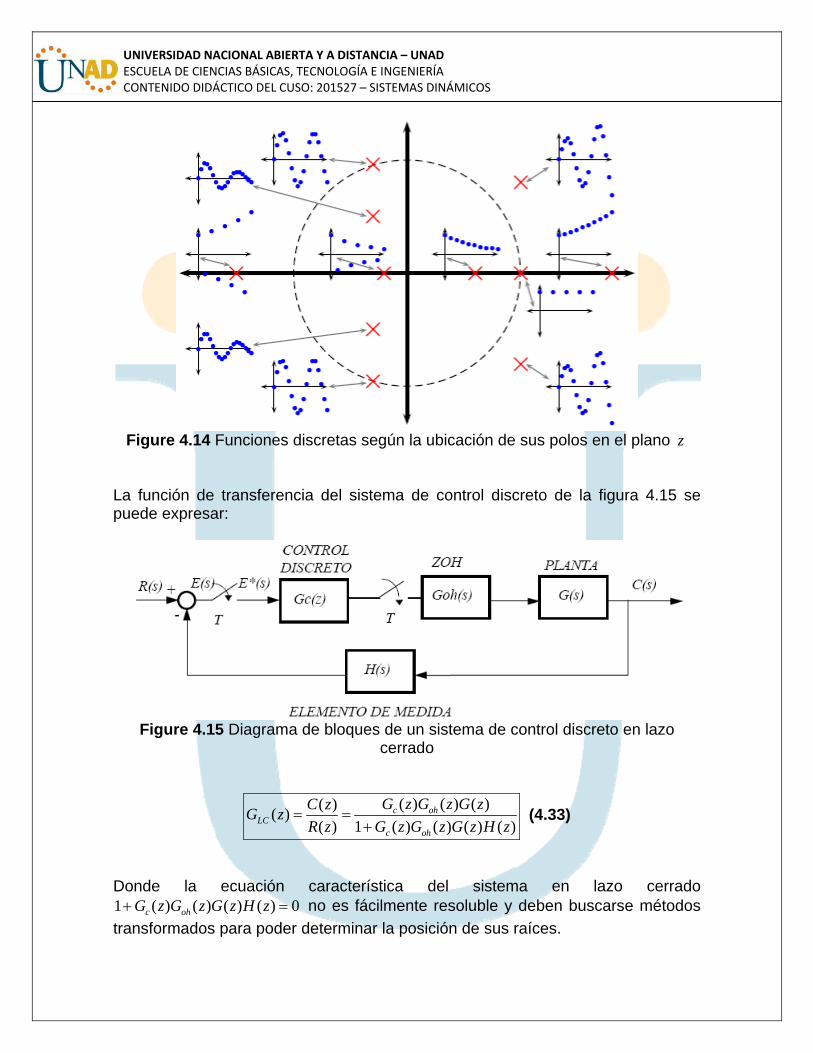
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 4.14 Funciones discretas según la ubicación de sus polos en el plano z
La función de transferencia del sistema de control discreto de la figura 4.15 se puede expresar:
Figure 4.15 Diagrama de bloques de un sistema de control discreto en lazo
cerrado
( ) ( ) ( )( )( )( ) 1 ( ) ( ) ( ) ( )
c ohLC
c oh
G z G z G zC zG zR z G z G z G z H z
= =+
(4.33)
Donde la ecuación característica del sistema en lazo cerrado 1 ( ) ( ) ( ) ( ) 0c ohG z G z G z H z+ = no es fácilmente resoluble y deben buscarse métodos transformados para poder determinar la posición de sus raíces.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En este caso, la aplicación directa del criterio de estabilidad de Routh Hurwitz no es útil, porque determina el número de raíces de la ecuación característica que se encuentran en semiplano derecho y no en el exterior del círculo de radio uno. Sin embargo, sí es posible aplicar el criterio de estabilidad de Routh Hurwitz tras una transformación que convierta el interior y el exterior del circulo de radio uno en un semiplano izquierdo y un semiplano derecho respectivamente; a esta transformación se le denomina transformación bilineal. La definición de la transformación bilineal no es única; sin embargo, la más conocida se realiza mediante el cambio de variable:
1 2 12 ;11
2
T w zz wT T zw
+ −⎛ ⎞= = ⎜ ⎟+⎝ ⎠− (4.34)
La transformación del círculo de radio uno ofrece el resultado:
sin2 1 2 1 2 22 tan1 1 2cos 2
j T
j T
Tz e Tw j jTT z T e T T
ω
ω
ω ωω
⎛ ⎞⎛ ⎞− −⎛ ⎞ ⎛ ⎞⎜ ⎟= = = =⎜ ⎟⎜ ⎟ ⎜ ⎟+ + ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠ (4.35)
Que efectivamente corresponde con el eje imaginario del plano transformado w .
Figure 4.16 Relación entre los planos ,s z y w
En conclusión, el círculo de radio uno del plano z se transforma, mediante la transformada bilineal, en el eje imaginario del plano w , de manera que puede
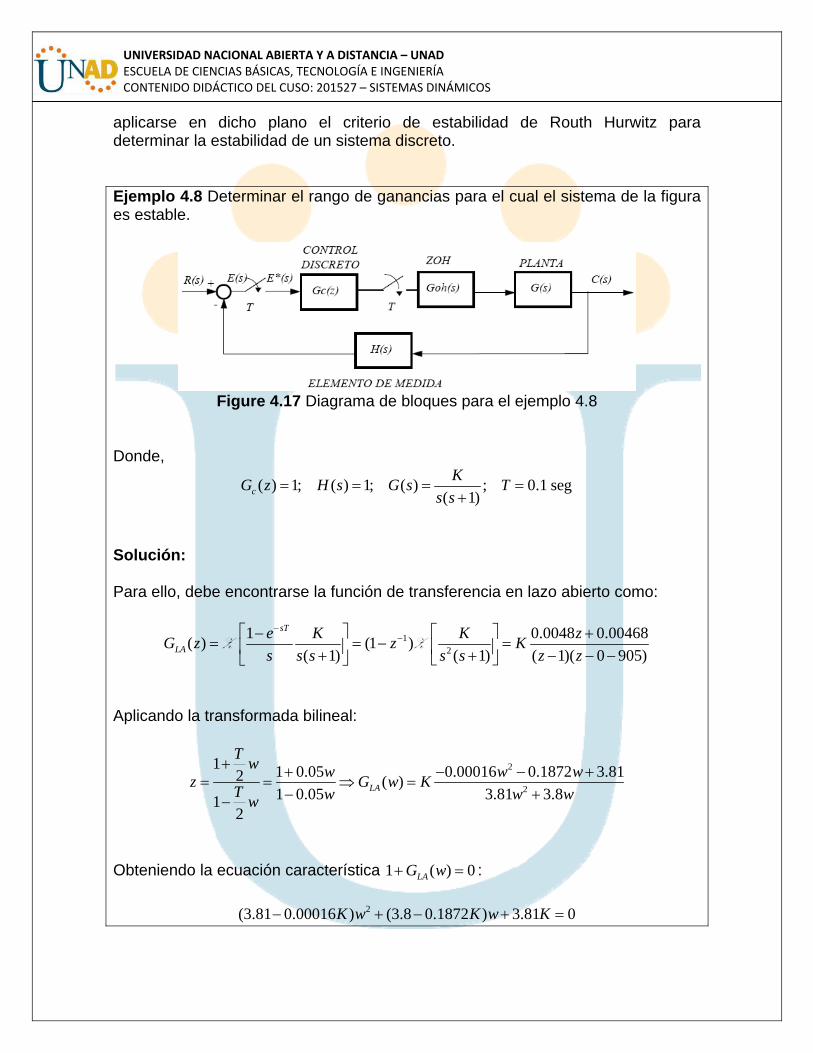
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
aplicarse en dicho plano el criterio de estabilidad de Routh Hurwitz para determinar la estabilidad de un sistema discreto. Ejemplo 4.8 Determinar el rango de ganancias para el cual el sistema de la figura es estable.
Figure 4.17 Diagrama de bloques para el ejemplo 4.8
Donde,
( ) 1; ( ) 1; ( ) ; 0.1 seg( 1)c
KG z H s G s Ts s
= = = =+
Solución: Para ello, debe encontrarse la función de transferencia en lazo abierto como:
12
1 0.0048 0.00468( ) (1 )( 1) ( 1) ( 1)( 0 905)
sT
LAe K K zG z z Ks s s s s z z
−−⎡ ⎤ ⎡ ⎤− +
= = − =⎢ ⎥ ⎢ ⎥+ + − − −⎣ ⎦⎣ ⎦Z Z
Aplicando la transformada bilineal:
2
2
1 1 0.05 0.00016 0.1872 3.812 ( )1 0.05 3.81 3.81
2
LA
T w w w wz G w KT w w ww
+ + − − += = ⇒ =
− +−
Obteniendo la ecuación característica 1 ( ) 0LAG w+ = :
2(3.81 0.00016 ) (3.8 0.1872 ) 3.81 0K w K w K− + − + =

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
El resultado, aplicando el criterio de estabilidad de Routh Hurwitz, indica que el sistema es estable para los valores de : 0<K<20.3K . En concreto, para 20.3K = se pueden obtener los puntos de corte con el eje imaginario en plano w para, posteriormente, determinar la frecuencia de oscilación del sistema discreto. Así, considerando del polinomio auxiliar:
[ ] 23.81 (0.00016)(20.3) (3.81)(20.3) 0 4.5075w w j− + = ⇒ = ± La frecuencia de oscilación es:
1 12 2 (4.5075)(0.1)tan tan 4.433 rad/seg2 0.1 2
wTT
ω − −⎛ ⎞ ⎛ ⎞= = =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Resultado muy parecido a la frecuencia que se obtenía en plano w debido a que la frecuencia de muestreo es suficientemente elevada,
2 62.83 rad/segs Tπω = =
Debe observarse que, así como un sistema continuo de segundo orden con realimentación unitaria siempre es estable (partiendo de un sistema en lazo abierto estable), un sistema discreto no tiene por qué serlo debido al efecto desestabilizador del periodo de muestreo. En concreto, realizando el mismo ejemplo con un periodo de muestreo mayor (por ejemplo 1 segT = ), el margen de valores de ganancia para garantizar estabilidad disminuye (0<K<2.39) . Otro método utilizado se conoce como el criterio de Jury, el cual permite determinar cuántas raíces tiene un polinomio en el interior del círculo unitario. Cumple, para el caso discreto, un papel análogo al que cumple el criterio de Routh Hurwitz en el caso continuo. Dado el polinomio característico ( )P z :
1 21 2 1 0( ) n n
n nP z a z a z a z a z a−−= + + + + + (4.36)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En donde los coeficientes ia son reales y na es positivo, es posible construir el Arreglo de Jury de ( )P z a partir de los coeficientes ia que aparecen en la ecuación anterior. Para ello, inicialmente se construye el arreglo que se muestra en la tabla 4.2: la primera línea contiene los coeficientes de ( )P z en orden, desde
0a hasta na , y en la segunda línea en orden inverso. En general, cada línea par contiene los mismos coeficientes que la línea inmediatamente anterior pero en el orden inverso. Los elementos de las líneas impares se construyen así:
0 0 1 0 2
1 2
; ; ;n k n k n kk k k
n k n k n k
a a b b c cb c d
a a b b c c− − − − −
− −
= = =
Table 4.2 Arreglo de Jury 0 1 2 2 1
0 1 2 2 1
1 2 2 1 0
0 1 2 2 1
1 2 3 1 1 0
0 1 2 2
2 3 4 2 0
0 1 2 3
3 2 1 0
0 1 2
Fila123456
2 52 42 3
n k n n n
n k n n n
n n n k
n k n n
n n n k
n k n
n n n k
z z z z z z za a a a a a aa a a a a a ab b b b b b
b b b b b bc c c c c
c c c c c
n p p p pn p p p pn q q q
− − −
− − −
− −
− − −
− − − −
− −
− − − −
−−−
Es decir, el primer elemento de una fila impar se calcula como el determinante de la matriz construida tomando de las dos líneas inmediatamente anteriores la primera y la última columna; el segundo elemento de forma similar pero con la primera y la penúltima columna; el tercero con la primera y la antepenúltima, y así sucesivamente. Dado que el último elemento sería el determinante de la matriz formada con dos columnas iguales (la primera dos veces), este valor sería siempre cero, y por tanto no se escribe en el arreglo (se ha eliminado).
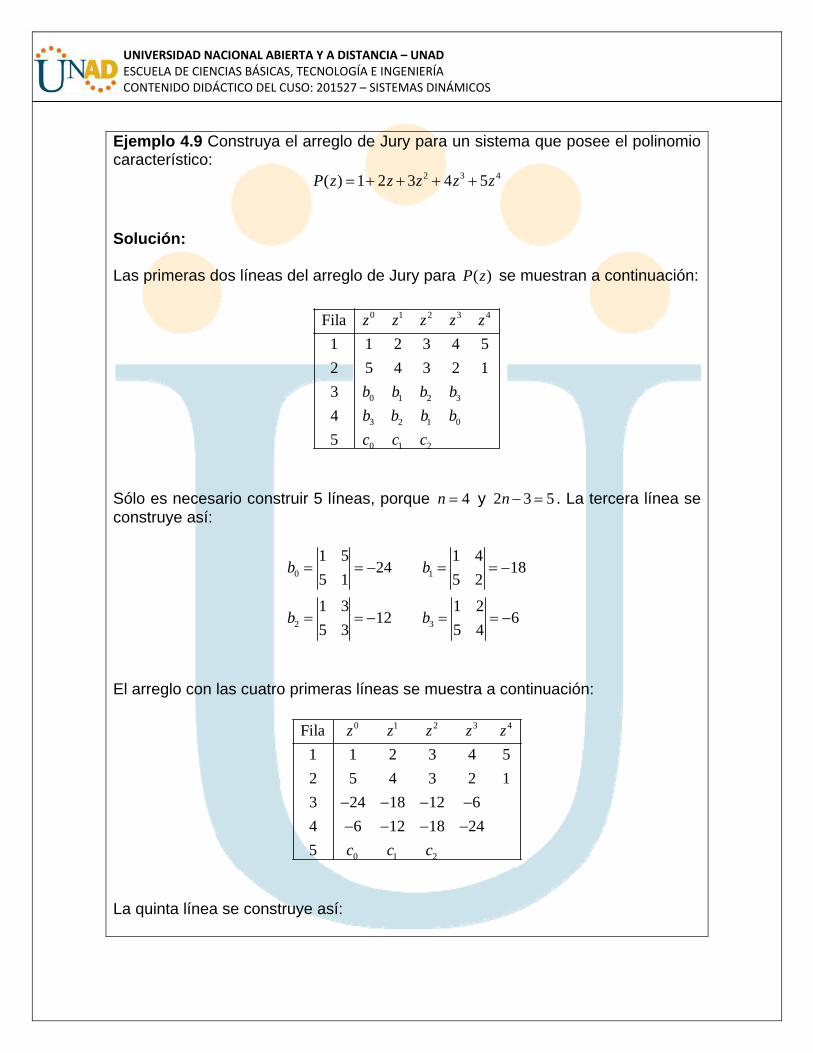
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Ejemplo 4.9 Construya el arreglo de Jury para un sistema que posee el polinomio característico:
2 3 4( ) 1 2 3 4 5P z z z z z= + + + + Solución: Las primeras dos líneas del arreglo de Jury para ( )P z se muestran a continuación:
0 1 2 3 4
0 1 2 3
3 2 1 0
0 1 2
Fila1 1 2 3 4 52 5 4 3 2 1345
z z z z z
b b b bb b b bc c c
Sólo es necesario construir 5 líneas, porque 4n = y 2 3 5n − = . La tercera línea se construye así:
0 1
2 3
1 5 1 424 18
5 1 5 2
1 3 1 212 6
5 3 5 4
b b
b b
= = − = = −
= = − = = −
El arreglo con las cuatro primeras líneas se muestra a continuación:
0 1 2 3 4
0 1 2
Fila1 1 2 3 4 52 5 4 3 2 13 24 18 12 64 6 12 18 245
z z z z z
c c c
− − − −− − − −
La quinta línea se construye así:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
0 1 2
24 6 24 12 24 18504 360 180
6 24 6 18 6 12c c c
− − − − − −= = = = = =
− − − − − −
0 1 2 3 4Fila
1 1 2 3 4 52 5 4 3 2 13 24 18 12 64 6 12 18 245 504 360 180
z z z z z
− − − −− − − −
Las condiciones necesarias y suficientes para que ( )P z tenga todas sus raíces en el interior del círculo unitario del plano z son:
(1)>0P (4.37)
>0 si es par( 1)
<0 si es imparn
Pn
⎧− ⎨
⎩ (4.38)
0
0 1
0 2
0 2
<>> 1 condiciones
>
n
n
n
a ab bc c n
q q
−
−
⎫⎪⎪⎪ −⎬⎪⎪⎪⎭
(4.39)
Nótese que este criterio se reduce a unas condiciones muy simples para el caso de polinomios de segundo orden ( 2)n = :
(1)>0P ( 1)>0P − 0 2a a< Ejemplo 4.10 Encuentre la estabilidad del sistema descrito por el polinomio característico ( )P z del ejemplo 4.9, cuyo arreglo de Jury se conoce.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Solución: Las condiciones de estabilidad se convierten en:
1 2 3 4(1) 1 2(1) 3(1) 4(1) 5(1) 15 0P = + + + + = >
1 2 3 4( 1) 1 2( 1) 3( 1) 4( 1) 5( 1) 3 0P − = + − + − + − + − = >
0 4
0 3
0 2
1 < 524 > 6
504 > 180
a ab bc c
= == == =
Por lo que ( )P z tiene todas sus raíces en el interior del círculo unitario. Ejemplo 4.11 Determinar el rango de ganancias para el cual un sistema discreto realimentado es estable. Conociendo que,
1 1( ) ( )0.3 0.7
G z H zz z
= =+ +
Solución: La función de transferencia del sistema realimentado es:
2
( ) ( 0.7)( )1 ( ) ( ) ( 0.21)
KG z K zF zKG z H z z z K
+= =
+ + + +
Para que el denominador de ( )F z tenga todas sus raíces en el círculo unitario, y por tanto el sistema realimentado sea estable, se deben satisfacer todas las condiciones de estabilidad del criterio de Jury; como el denominador es de segundo orden, estas condiciones se convierten en:
(1) 1 1 (0.21 ) 0P K= + + + >
( 1) 1 1 (0.21 ) 0P K− = − + + >

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
0 40.21 1K a a+ = < =
Estas condiciones se convierten en
2.21K > −
0.21K > −
1.21 0.79K− < <
Lo que es equivalente a
0.21 0.79K− < <
5. CAPITULO 5: ANÁLISIS DE RESPUESTA EN FRECUENCIA INTRODUCCIÓN El término respuesta en frecuencia, se refiere a la respuesta de un sistema en estado estable ante una entrada senoidal. En los métodos de la respuesta en frecuencia, la frecuencia de la señal de entrada se varía en un cierto rango, para estudiar la respuesta resultante. Una ventaja del enfoque de la respuesta en frecuencia es que las pruebas de la respuesta en frecuencia son, en general, sencillas y pueden ser muy precisas con el uso de generadores de señales senoidales que se obtienen con facilidad y un equipo de medición preciso. Por lo común las funciones de transferencia de los componentes complicados se determinan experimentalmente mediante pruebas de la respuesta en frecuencia. En el presente capítulo se describirá la metodología de análisis basada en la respuesta frecuencial de un sistema de control. Dicha metodología requiere el conocimiento de la respuesta frecuencial del sistema en lazo abierto (que puede obtenerse de un modo sencillo a partir de medidas de la respuesta en régimen permanente senoidal – RPS) para, posteriormente, aplicar técnicas como los diagramas de Bode y de Nyquist, que permitirán determinar la estabilidad absoluta del sistema en lazo cerrado.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Para entender mejor este concepto considere el sistema de la figura 5.1:
Figure 5.1 Sistema de tiempo continuo
Donde,
[ ] 2 2( ) sin( )( )
E s ts s j s jω ωωω ω ω
= = =+ − +
L (5.1)
En el sistema definido, se obtiene el régimen permanente senoidal (RPS) considerando la respuesta del sistema estable cuando el tiempo tiende a infinito y se posee una señal de entrada senoidal.
( )( )( )( )
G sC ss j s j
ωω ω
=+ −
(5.2)
Para obtener la transformada inversa de Laplace debe desarrollarse ( )C s en fracciones parciales:
1 2( ) ( )gK KC s C s
s j s jω ω= + +
+ − (5.3)
Los dos primeros términos del desarrollo son originados por las raíces de la transformada de Laplace de la señal senoidal de entrada, mientras que ( )gC s contiene la serie de términos correspondientes al desarrollo en fracciones parciales de los polos de ( )G s . El RPS únicamente existe en sistemas estables, dado que ello implica que los términos temporales que caracterizan la respuesta transitoria del sistema desaparecen cuando el tiempo crece suficientemente:
1 ( ) ( ) 0 cuando g gC s c t t− ⎡ ⎤ = → →∞⎣ ⎦L (5.4) Denominando ( )ssC s a la transformada de Laplace de la señal que perdura cuando el tiempo crezca infinitamente (estado estacionario):

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1 2( )ss
K KC ss j s jω ω
= ++ −
(5.5)
Calculando los residuos:
1 2( ) ( )( ) ( ) ;2 2s j
G j G jK C s s j Kj jω
ω ωω=−
−= + = − = (5.6)
Debe observarse que,
( ) ( )s j
G j G sω
ω=
=
Es la respuesta frecuencial del sistema de tiempo continuo, esto es, debe evaluarse la función de transferencia en un punto del plano s ubicado sobre el eje imaginario. A partir de la descripción del procedimiento de cálculo puede indicarse que ( )G jω es una función de variable compleja, y se verifica que:
( )( ) ( ) j G jG j G j e ωω ω ∠= (5.7)
( ) ( )( ) ( ) ( )j G j j G jG j G j e G j eω ωω ω ω∠ − − ∠− = − = (5.8) Realizando la transformada de inversa de Laplace de la ecuación de ( )ssC s , se obtiene:
( ) ( )1 2( ) j t j tssc t K e K eω ω−= + (5.9)
Sustituyendo las expresiones de los residuos 1 2y K K :
( ) ( )
( )( ) ( )
( ) ( ) ( ) sin ( )2
j t G j j t G j
sse ec t G j G j t G j
j
ω ω ω ω
ω ω ω ω+∠ − +∠⎡ ⎤−
= = +∠⎢ ⎥⎣ ⎦
(5.10)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En conclusión, la respuesta de un sistema de tiempo continuo en RPS es una señal senoidal con igual frecuencia que la señal de entrada, con una amplitud igual al producto de la amplitud de entrada por el módulo de la respuesta frecuencial, y cuya fase es igual a la suma de fases de la señal de entrada y la fase de su respuesta frecuencial. De este modo, no es necesario realizar la transformada inversa de Laplace para determinar cuál es la salida de un sistema de tiempo continuo estable en RPS. Debe observarse que la obtención de medidas experimentales de la respuesta frecuencial de un sistema es muy sencilla, debido a que puede utilizarse la propia señal de excitación para realizar el sincronismo de la medida. De este modo, se puede obtener la respuesta frecuencial a partir de medidas experimentales sin necesidad de conocer la función de transferencia del sistema. Lección 1: DIAGRAMAS DE BODE El valor de una función de transferencia ( )F s , para un s específico, es un número complejo cuya amplitud es ( )F s y cuyo ángulo es { }arg ( )F s . Los diagramas de Bode para sistemas continuos muestran cómo varía la amplitud y el ángulo de ese número complejo, cuando s toma todos los posibles valores del eje imaginario positivo ( ; (0, ))s jω ω= ∈ ∞ . Específicamente se definen los siguientes diagramas: • Diagrama de magnitud: La abscisa (eje horizontal) muestra el valor de ω en
escala logarítmica. La ordenada (eje vertical) muestra la magnitud de ( )F jω medida en decibeles:
en dB( ) 20log ( )F j F jω ω=
• Diagrama de fase: La abscisa (eje horizontal) muestra el valor de ω en escala
logarítmica. La ordenada (eje vertical) muestra el ángulo de ( )F jω medido en grados o radianes.
La ventaja principal de usar diagramas de Bode es que la multiplicación de magnitudes se convierte en adición. Además, cuenta con un método simple para
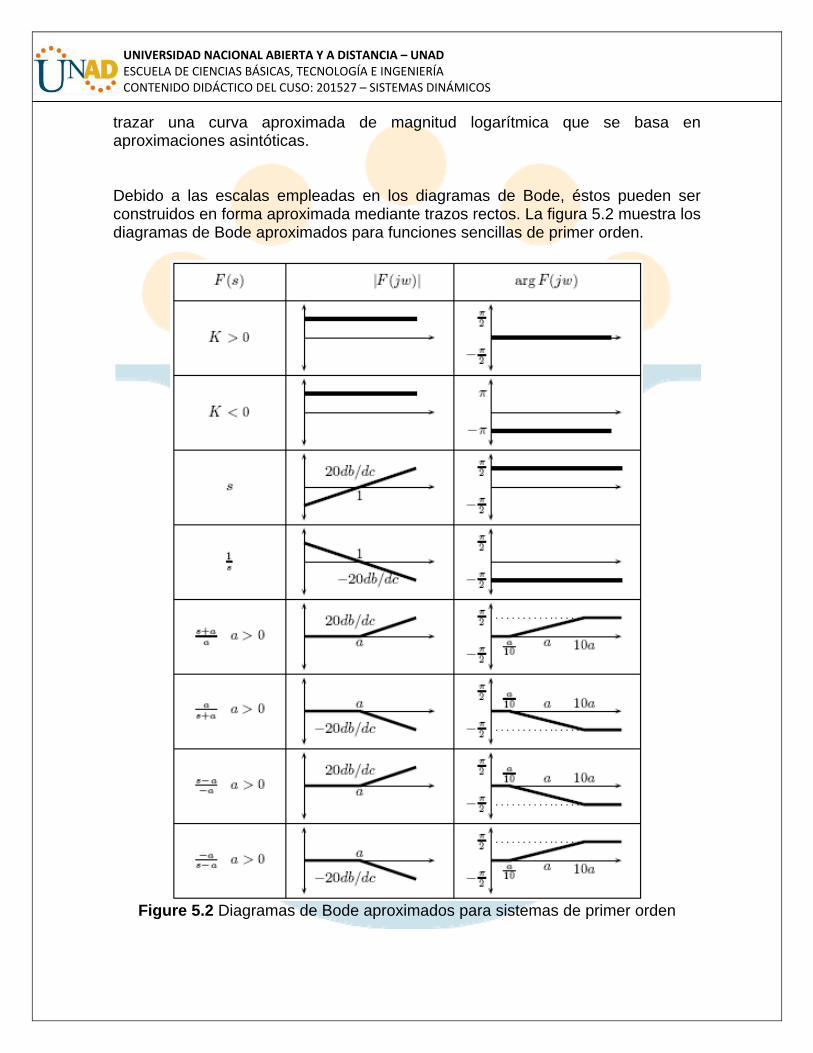
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
trazar una curva aproximada de magnitud logarítmica que se basa en aproximaciones asintóticas. Debido a las escalas empleadas en los diagramas de Bode, éstos pueden ser construidos en forma aproximada mediante trazos rectos. La figura 5.2 muestra los diagramas de Bode aproximados para funciones sencillas de primer orden.
Figure 5.2 Diagramas de Bode aproximados para sistemas de primer orden
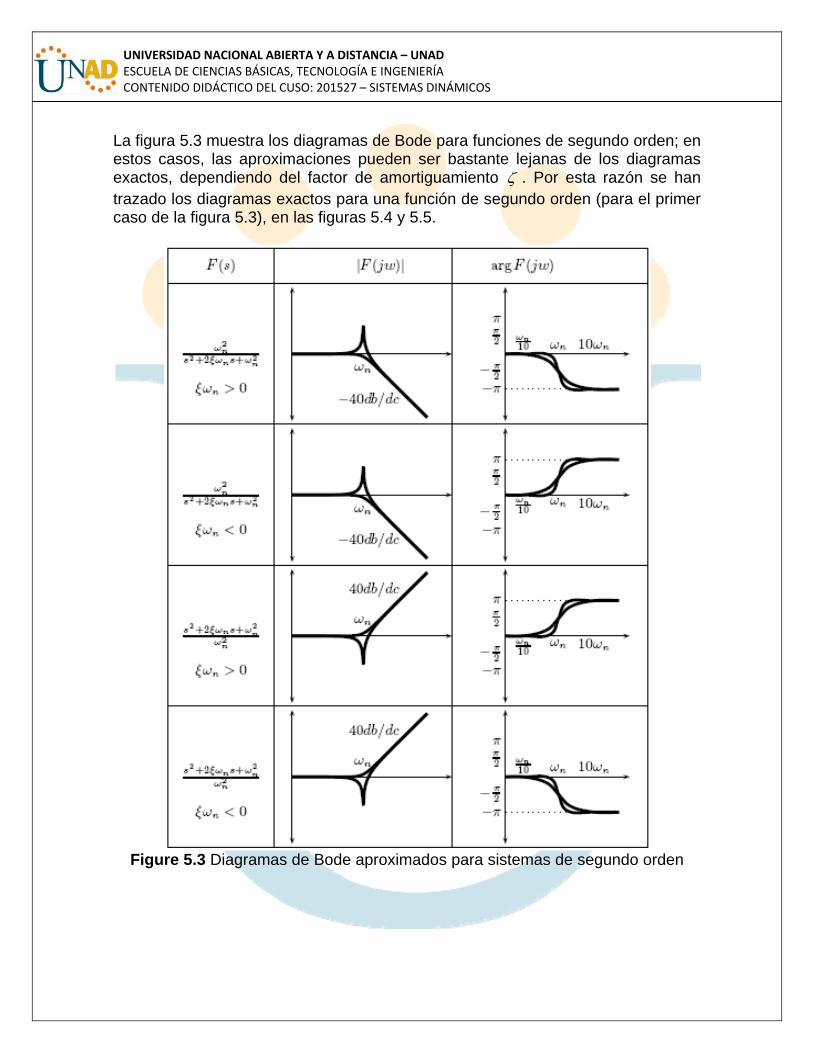
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
La figura 5.3 muestra los diagramas de Bode para funciones de segundo orden; en estos casos, las aproximaciones pueden ser bastante lejanas de los diagramas exactos, dependiendo del factor de amortiguamiento ζ . Por esta razón se han trazado los diagramas exactos para una función de segundo orden (para el primer caso de la figura 5.3), en las figuras 5.4 y 5.5.
Figure 5.3 Diagramas de Bode aproximados para sistemas de segundo orden

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Para funciones de transferencia más sofisticadas que las de las figuras 5.2 y 5.3 se descompone la función de transferencia como productos de términos más sencillos, se trazan los diagramas de Bode estas de funciones y luego se suman punto a punto para obtener los diagramas de la función original.
Figure 5.4 Diagrama de Bode de magnitud para un sistema de segundo orden con
distintos valores de ζ
Figure 5.5 Diagrama de Bode de fase para un sistema de segundo orden con
distintos valores de ζ

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Esta aproximación, mediante asíntotas (líneas rectas), es suficiente si sólo se necesita información general sobre la característica de la respuesta en frecuencia. Si se desea obtener curvas exactas, es fácil corregir las curvas asintóticas. Lección 2: ANÁLISIS DE ESTABILIDAD DE BODE El análisis del lugar geométrico de las raíces permite establecer la ubicación de los polos de un sistema conforme cambia el valor de K . Si se está interesado en estudiar la estabilidad del sistema, debemos analizar los puntos en los cuales las ramas del LGR cruzan el eje imaginario, pues es en ese punto en donde los polos pasan del semiplano izquierdo al derecho, o viceversa, y por lo tanto son los puntos en donde puede cambiar la estabilidad del sistema realimentado. Además, el LGR es simétrico respecto al eje horizontal, por lo cual basta con estudiar en qué momento las ramas atraviesan una de las dos mitades del eje imaginario, generalmente la mitad positiva. Este hecho sugiere otra posibilidad de estudiar la estabilidad de los sistemas realimentados: En lugar de estudiar en dónde están ubicadas las ramas del LGR en todo el plano complejo, se centra la atención únicamente en el eje imaginario positivo, y detectar cuándo es atravesado por alguna rama del LGR. Recuerde que los puntos del plano complejo que forman parte del LGR son tales que al evaluar en ellos la función ( ) ( )G s H s el ángulo del número complejo resultante debe ser 180º± o 0º. De acuerdo con lo anterior, los puntos en donde puede cambiar la estabilidad del sistema realimentado coincide con aquellos puntos jω del eje imaginario en donde
{ }180º
arg ( ) ( )0º
G j H jω ω±⎧
= ⎨⎩
(5.11)
Para encontrar cuáles son los valores de ω que satisfacen esta condición pueden trazarse los diagramas de Bode de ( ) ( )G s H s y buscar gráficamente en el

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
diagrama de fase cuáles son los puntos en donde el ángulo de ( ) ( )G j H jω ω vale 180º± o 0º, tal como se muestra en la figura 5.6.
Figure 5.6 Relación entre el LGR y los diagramas de Bode
Para determinar los valores de K en los cuales la rama del LGR atraviesa el eje imaginario, puede emplearse
1( ) ( )G j H jK
ω ω = (5.12)
El valor de ( ) ( )G j H jω ω puede leerse (en decibeles) en el diagrama de bode de magnitud, tal como se muestra en la figura 5.6. A partir de ese valor, y empleando esta última condición, puede determinarse los valores de K para los cuales una rama del LGR atraviesa el eje imaginario ( cK en la figura 5.6). Ejemplo 5.1 Dibujar el diagrama de Bode para el sistema de la figura:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.7 Sistema del ejemplo 5.1
Donde los bloques ( )G s y ( )H s son:
1 1( ) ; ( )( 1)( 2) ( 3)
G s H ss s s
= =+ + +
Solución: La figura 5.8 muestra los diagramas de Bode de ( ) ( )G s H s .
Figure 5.8 Diagrama de Bode para el ejemplo 5.1
Debido a que los puntos en los cuales puede cambiar la estabilidad del sistema realimentado son:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
{ }180º
arg ( ) ( )0º
G j H jω ω±⎧
= ⎨⎩
Es decir, aquellos en los que el ángulo de ( ) ( )G j H jω ω es 0º o es ± 180º. Al observar la figura 5.8 se nota que el ángulo de ( ) ( )G j H jω ω es 180º− para una frecuencia de 0.528 Hz , es decir, para 2 0.528 3316 rad/segω π= = . En esa frecuencia el valor de la magnitud de ( ) ( )G j H jω ω es de 35.56 dB− , lo que significa que la magnitud de K , en decibeles, para la cual una rama del LGR atraviesa el eje imaginario es tal que,
en dB
1 35.56K
= −
Lo que equivale a,
en dB en dB 35.5620 20 201 10 10 10 60
K K
K KK
−− −
= ⇒ = ⇒ = =
Como 0K > entonces 60K = . También se debe buscar los puntos para los cuales el ángulo de ( ) ( )G j H jω ω es 0º. En la figura 8.8 se observa que el diagrama de fase es asintótico a 0º, es decir, que para 0ω = el ángulo de ( ) ( )G j H jω ω es 0º. El diagrama de magnitud de ( ) ( )G j H jω ω es asintótico a 15.56 dB− , lo que significa que la magnitud de K , en decibeles, para la cual una rama del LGR complementario atraviesa el eje imaginario es tal que,
en dB
1 15.56K
= −
Lo que equivale a,
en dB en dB 15.5620 20 201 10 10 10 6
K K
K KK
−− −
= ⇒ = ⇒ = =
Como 0K < entonces 6K = − . Se ha encontrado los valores de K para los cuales un polo cruza el eje imaginario, y han resultado ser – 6 y 60. Esto significa que al

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
variar K desde −∞ hasta ∞ , la estabilidad del sistema realimentado sólo puede cambiar en – 6 y 60. En consecuencia, se pueden definir tres intervalos para K en los cuales la estabilidad es constante; para conocer la estabilidad de cada intervalo basta con determinar la de uno de sus puntos: • ( , 6) :K ∈ −∞ − Se selecciona 10K = − de tal manera que la ecuación
característica del sistema se convierte en
3 26 11 4s s s+ + − Como el denominador tiene coeficientes de signos diferentes al menos tiene una raíz en el semiplano derecho, y en consecuencia el sistema realimentado es inestable. • ( 6,60) :K ∈ − Se selecciona 0K = de tal manera que la ecuación característica
del sistema se convierte en
3 26 11 6 ( 1)( 2)( 3)s s s s s s+ + + = + + + Las raíces del denominador son negativas (–1, –2 y –3), y en consecuencia el sistema realimentado es estable. • (60, ) :K ∈ ∞ Se selecciona 100K = de tal manera que la ecuación
característica del sistema se convierte en
3 26 11 106s s s+ + + Cuyas raíces son 6.71− y 0.36 3.96j± , es decir que tiene dos raíces en el semiplano derecho y en consecuencia el sistema realimentado es inestable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1. MARGEN DE FASE Las ecuaciones (5.11) y (5.12) establecen dos condiciones que deben cumplir los puntos jω del plano complejo para formar parte LGR; una de las condiciones hace referencia a la ganancia de ( ) ( )G s H s y la otra a su fase. La idea de los márgenes de estabilidad consiste en suponer que 1K = , y explorar qué margen se tiene cuando se cumple una de esas condiciones. El margen de fase consiste en el menor valor que se le debe sumar al ángulo de
( ) ( )G s H s cuando se satisface la segunda condición, para que simultáneamente se cumpla la primera condición. Es decir,
180º ( )LA tMF G jω= +∠ (5.13) En donde,
en dB1 ó 20log ( ) 0 dB
( )t
LA tLA t
G jG j
ωω
ω= = (5.14)
tω se denomina frecuencia de transición del sistema y, como puede observarse en la expresión, se mide mediante la función de transferencia en lazo abierto.
0 sistema estableCriterio:
0 sistema inestableMF
MF> ⇒⎧
⎨ < ⇒⎩ (5.15)
De este modo, el margen de fase es la cantidad de fase que puede quitarse al sistema en lazo abierto permaneciendo estable el sistema en lazo cerrado. Para el caso en que 0K > , el margen de fase puede leerse en los diagramas de Bode como 180º φ− , donde φ es el ángulo a la frecuencia en la que la ganancia es de 0dB. Para el caso en que 0K < , el margen de fase puede leerse en los diagramas de Bode como φ− , donde φ es el ángulo a la frecuencia en la que la ganancia es de 0dB.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
2. MARGEN DE GANANCIA El margen de ganancia consiste en el menor valor por el que se debe amplificar la ganancia de ( ) ( )G s H s cuando se satisface la primera condición, para que simultáneamente se cumpla la segunda condición. Es decir,
dB dB
1 ó 20log ( )( ) LA i
LA i
MG MG G jG j
ωω
= = − (5.16)
Donde,
180º( )i
LA iG jω
ω= ±
∠ (5.17)
iω es la frecuencia para la cual el sistema el lazo abierto adquiere 180º± .
dB
dB
1 ( 0 dB) sistema estableCriterio:
1 ( 0 dB) sistema inestableMG MG
MG MG> > ⇒⎧
⎨ < < ⇒⎩ (5.18)
De este modo, el margen de ganancia es la cantidad de ganancia que puede añadirse al sistema en lazo abierto permaneciendo estable el sistema en lazo cerrado. En las figuras 5.9 y 5.10 pueden observarse las mediciones del margen de fase y el margen de ganancia en el diagrama de Bode para diversos valores de K del sistema:
1( )( 1)( 2)( 3)LAG ss s s
=+ + +
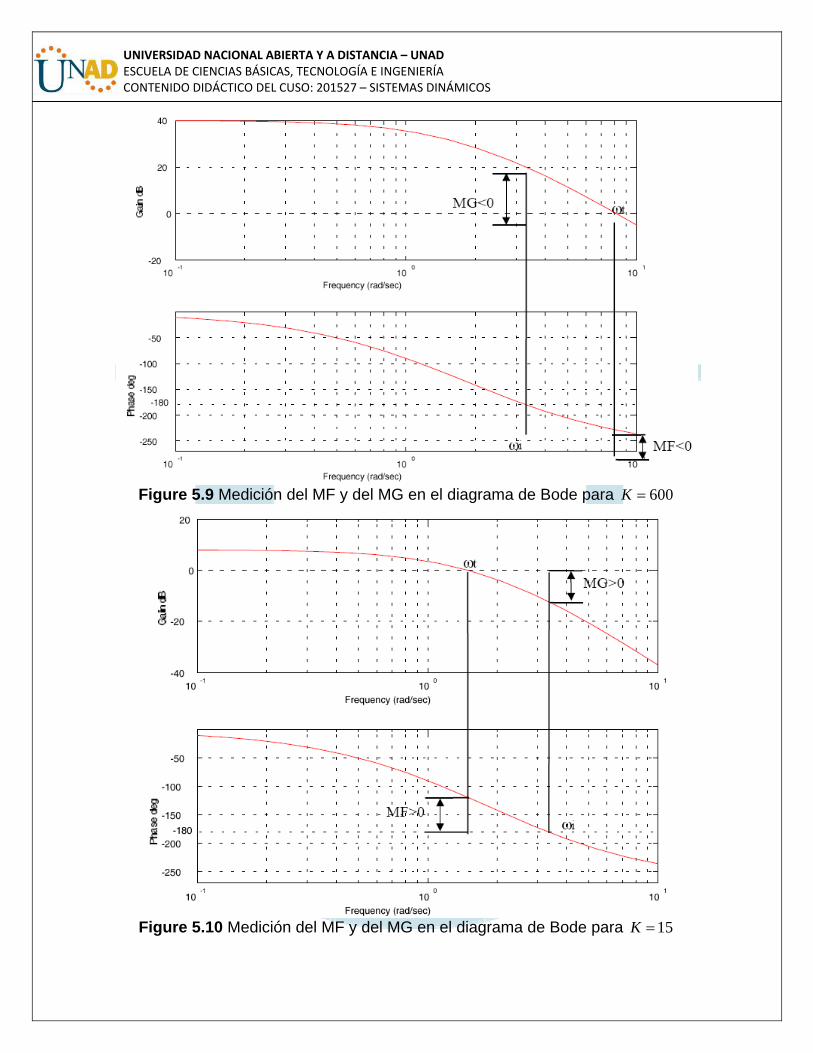
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.9 Medición del MF y del MG en el diagrama de Bode para 600K =
Figure 5.10 Medición del MF y del MG en el diagrama de Bode para 15K =

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Para el caso en que 0K > , el margen de ganancia puede leerse (en decibeles) en los diagramas de Bode como el valor negativo de la ganancia a la frecuencia en la que la fase es de 180º± . Para el caso en que 0K < , el margen de ganancia puede leerse (en decibeles) en los diagramas de Bode como el valor negativo de la ganancia a la frecuencia en la que la fase es de 0º. Lección 3: DIAGRAMA DE NYQUIST Las formas más habituales de representar la respuesta frecuencial de un sistema son: • Diagrama de Bode en magnitud y fase: Diagrama en módulo o fase de
( )G jω respecto a un eje frecuencial. • Diagrama polar: Diagrama de módulo y fase de ( )G jω en el plano ( )G jω
(0 )ω≤ < ∞ . En la figura 5.11 se muestran los ejes coordenados de un diagrama polar, así como la información de módulo y fase que puede extraerse de un punto de dicho diagrama.
Figure 5.11 Diagrama polar
0( )0 0 0 0( ) ( ) ( ) ( ) j G jG j A jB G j e ωω ω ω ω ∠= + = (5.19)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En la figura 5.12 se representa el diagrama polar de un sistema de tercer orden, donde se puede observar la evolución de la fase desde 0º hasta 270º− correspondientes a 0ω → y ω →∞ , respectivamente. Debe observarse que el diagrama posee un sentido en frecuencias crecientes, de manera que 0 1 2ω ω ω< < . El diagrama polar posee la información de fase y módulo de la respuesta frecuencial en una única representación, a diferencia del diagrama de Bode que los representa en gráficas separadas.
Figure 5.12 Diagrama polar de un sistema de tercer orden
Para mostrar la información contenida en un diagrama polar, pueden observarse las distintas respuestas frecuenciales que se muestran en la figura 5.13, correspondientes al siguiente sistema de segundo orden:
2
1( )2 1
G ss sζ
=+ +

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.13 Diagrama polar de un sistema de segundo orden
En dicha figura se puede ver el efecto de resonancia cuando 0ζ < , así como la frecuencia natural o de paso por la fase 90º− . Lección 4: ANÁLISIS DE ESTABILIDAD DE NYQUIST El criterio de estabilidad de Nyquist permite determinar la estabilidad absoluta de un sistema lineal invariante en el tiempo en lazo cerrado. Para su aplicación, únicamente se necesita conocer la respuesta frecuencial del sistema en lazo abierto. De hecho, a partir de la respuesta frecuencial en lazo abierto, el criterio de estabilidad de Nyquist permite determinar el número de raíces de la ecuación característica (polos en lazo cerrado) que existen en el semiplano derecho. Obviamente, el sistema es estable en lazo cerrado cuando el resultado de la aplicación del criterio de Nyquist es cero. El criterio de estabilidad de Nyquist se basa en los teoremas de la transformación conforme y el teorema de la representación, los cuales se exponen a continuación: • Transformación conforme: Dada una función ( )F s analítica (continua y
derivable) en todo el plano s salvo en sus polos, todo camino cerrado continuo en s que no pase por ningún punto singular de ( )F s se transforma en una

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
curva cerrada continua en el plano ( )F s , preservándose distancias y ángulos de corte. La figura 5.14 muestra el teorema de la transformación conforme de un modo gráfico.
Figure 5.14 Teorema de la transformación conforme
• Teorema de la representación: Dada una función ( )F s con P polos y Z ceros, considerando inclusive su multiplicidad, incluidos en un contorno cerrado continuo del plano s recorrido en sentido horario que no pase por ningún punto singular de ( )F s , éste se transforma en una curva cerrada continua en el plano
( )F s en la cual se producen N rodeos en sentido horario al origen, tal que:
0 sentido horario; donde:
0 sentido antihorarioN
N Z PN
> ⇒⎧= − ⎨ < ⇒⎩
(5.20)
En la figura 5.15 se muestra el teorema de la representación de un modo gráfico. En dicha figura puede observarse que se rodea un polo de la función ( )F s en sentido horario. Rodear un polo de una función en un sentido implica lograr un rodeo al origen en sentido contrario; este resultado es lógico al realizar dicho polo una contribución total de 360º de fase en la función (en oposición de fase debido a la característica de un polo). El efecto contrario se verificaría al evaluar un cero.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.15 Teorema de la representación
El criterio de estabilidad de Nyquist escoge como función evaluable el propio polinomio característico, y evalúa la existencia de ceros de dicho polinomio en un contorno que contiene todo el semiplano derecho del plano s mediante la aplicación del teorema de la representación. Así ( ) 1 ( ) ( )F s G s H s= + , donde se supone el conocimiento, a priori, de la función de transferencia en lazo abierto
( ) ( )G s H s (de este modo, el parámetro P queda determinado como el número de polos en lazo abierto que se encuentran en el semiplano derecho del plano s ). Mediante la transformación del contorno denominado recorrido de Nyquist (que contiene todo el semiplano derecho del plano s ) a través de la función ( )F s , se conocen el número de rodeos al origen en el plano ( )F s (y su signo); y, por último, aplicando el teorema de la representación, se determina el número de ceros de la ecuación característica Z (polos en lazo cerrado) que existen en semiplano derecho del plano s . Obsérvese que, si bien este procedimiento es suficiente para determinar si un sistema es estable, este método permitirá además determinar la existencia de raíces de la ecuación característica sobre el eje imaginario. El recorrido de Nyquist es un contorno cerrado continuo recorrido en sentido horario que contiene todo el semiplano derecho en su interior. Debe conocerse la transformación de dicho recorrido mediante la función ( ) 1 ( ) ( )F s G s H s= + para determinar el número de rodeos al origen existentes en el plano ( )F s . Para poder aplicar la transformación conforme es necesario presuponer que no existen polos de ( )F s (esto es, no existen polos en lazo abierto) en el eje imaginario.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.16 Recorrido de Nyquist
La transformación del recorrido de Nyquist puede descomponerse en dos tramos que a continuación se estudiarán por separado, tal y como muestra la figura 5.16: • Transformación del tramo ABC mediante la función ( ) 1 ( ) ( ).F s G s H s= +
( )s →∞ . Dado que el sistema en lazo abierto es causal se cumple:
lim1 ( ) ( ) ctes
G s H s→∞
+ =
Donde esta constante es igual a la unidad cuando el grado del denominador es mayor que el grado del numerador en la función de transferencia en lazo abierto. En conclusión, la transformación del tramo ABC (zona del recorrido de Nyquist trazada para s →∞ no puede proporcionar rodeos al origen porque implica un único punto en el plano ( )F s . De este modo la transformación de este tramo no debe considerarse en el análisis del criterio de estabilidad de Nyquist. • Transformación del tramo CA . s jω= . Como el tramo CA , es en definitiva el
eje imaginario del plano s , en este caso:
1 ( ) ( ) 1 ( ) ( )s j
G s H s G j H jω
ω ω=
+ = +
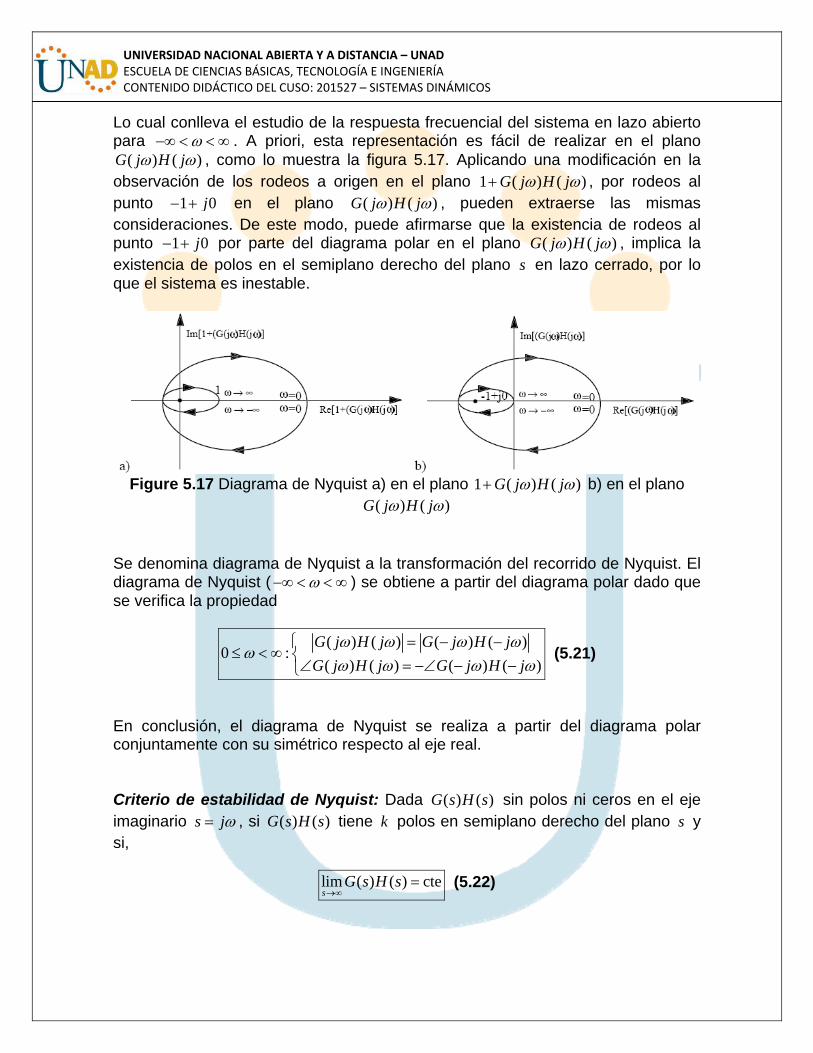
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Lo cual conlleva el estudio de la respuesta frecuencial del sistema en lazo abierto para ω−∞ < < ∞ . A priori, esta representación es fácil de realizar en el plano
( ) ( )G j H jω ω , como lo muestra la figura 5.17. Aplicando una modificación en la observación de los rodeos a origen en el plano 1 ( ) ( )G j H jω ω+ , por rodeos al punto 1 0j− + en el plano ( ) ( )G j H jω ω , pueden extraerse las mismas consideraciones. De este modo, puede afirmarse que la existencia de rodeos al punto 1 0j− + por parte del diagrama polar en el plano ( ) ( )G j H jω ω , implica la existencia de polos en el semiplano derecho del plano s en lazo cerrado, por lo que el sistema es inestable.
Figure 5.17 Diagrama de Nyquist a) en el plano 1 ( ) ( )G j H jω ω+ b) en el plano
( ) ( )G j H jω ω Se denomina diagrama de Nyquist a la transformación del recorrido de Nyquist. El diagrama de Nyquist ( ω−∞ < < ∞ ) se obtiene a partir del diagrama polar dado que se verifica la propiedad
( ) ( ) ( ) ( )0 :
( ) ( ) ( ) ( )G j H j G j H jG j H j G j H j
ω ω ω ωω
ω ω ω ω⎧ = − −
≤ < ∞ ⎨∠ = −∠ − −⎩
(5.21)
En conclusión, el diagrama de Nyquist se realiza a partir del diagrama polar conjuntamente con su simétrico respecto al eje real. Criterio de estabilidad de Nyquist: Dada ( ) ( )G s H s sin polos ni ceros en el eje imaginario s jω= , si ( ) ( )G s H s tiene k polos en semiplano derecho del plano s y si,
lim ( ) ( ) ctes
G s H s→∞
= (5.22)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Para que el lugar ( ) ( )G j H jω ω tenga estabilidad al variar ω desde −∞ a ∞ deben producirse k rodeos al punto 1 0j− + en sentido antihorario. Esto es, definiendo: • N =Número de rodeos a 1 0j− + ; en sentido horario ( 0)N > y sentido
antihorario ( 0)N < . • P =Polos en lazo abierto en semiplano derecho del plano s . • Z =Polos en lazo cerrado en semiplano derecho del plano s . Para que un sistema sea estable debe cumplir la condición:
0Z N P= + = (5.23) Al aplicar el criterio de estabilidad de Nyquist sobre un sistema de control se producirá uno de los siguientes casos: • No existe ningún rodeo a 1 0j− + . En este caso 0N = , lo que implica Z P= . De
este modo, el sistema en lazo cerrado es estable si también lo es el sistema en lazo abierto.
• Hay uno o varios rodeos en sentido antihorario a 1 0j− + . En este caso el
sistema en lazo cerrado es estable si el número de rodeos coincide con el número de polos en lazo abierto en semiplano derecho del plano s .
• Hay uno o varios rodeos en sentido horario a 1 0j− + . El sistema lazo cerrado
es inestable. Cuando un sistema tiene polos en lazo abierto en el eje imaginario, es necesario modificar el recorrido de Nyquist, debido a que el teorema de la representación no puede aplicarse. El nuevo recorrido de Nyquist considera todo el semiplano derecho del plano s , evitando las singularidades sobre el eje imaginario, de modo que no deban contabilizarse en el parámetro P , tal y como muestra la figura 5.18.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.18 Recorrido de Nyquist modificado
La aparición de singularidades sobre el eje imaginario conlleva arcos de radio infinito en el plano transformado, que deberán considerarse en el estudio del número de rodeos al punto 1 0j− + por parte del diagrama de Nyquist. Ejemplo 5.2 Existe una estrecha relación entre la estabilidad deducida mediante las técnicas del lugar geométrico de las raíces y el criterio de estabilidad de Nyquist. Dado el sistema mostrado en la figura 5.19.
Figure 5.19 Sistema realimentado para el ejemplo 5.2
Donde,
2
3
( 1)( ) sG s Ks+
=
a) Trazar el lugar geométrico de las raíces determinando: LGR sobre eje real,
asíntotas, puntos de ruptura y cortes del LGR con el eje imaginario. Determinar el rango de valores de K para el cual el sistema es estable.
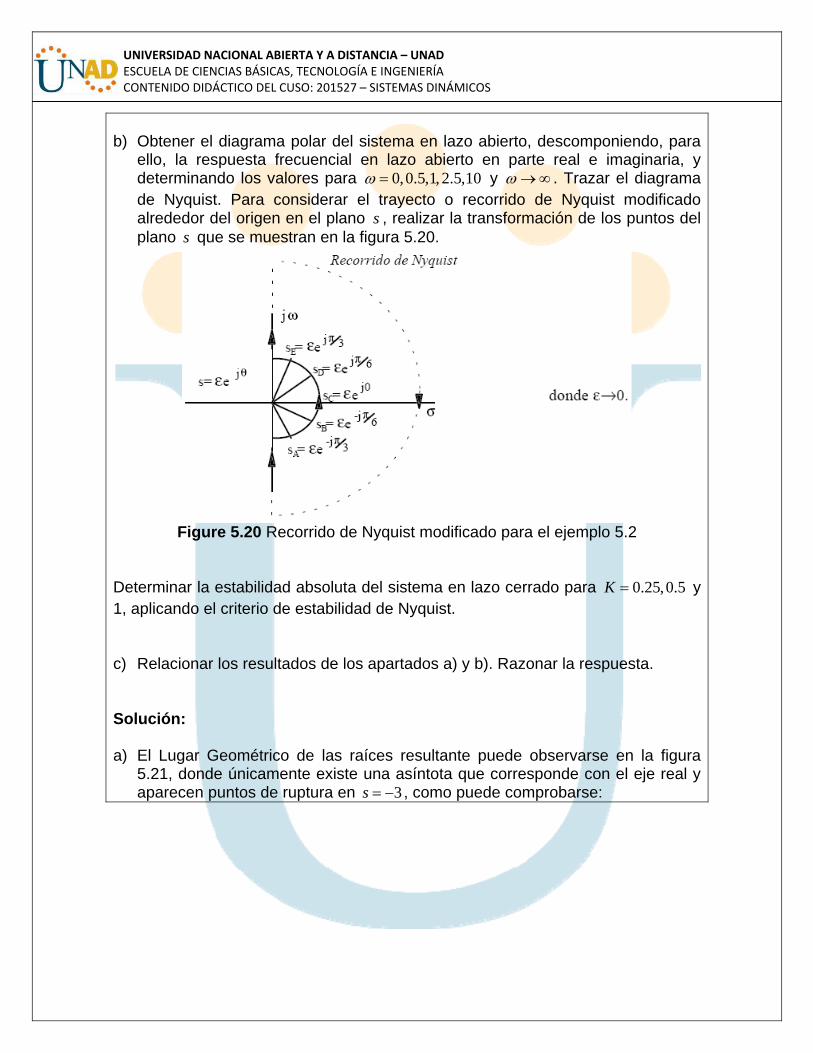
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
b) Obtener el diagrama polar del sistema en lazo abierto, descomponiendo, para
ello, la respuesta frecuencial en lazo abierto en parte real e imaginaria, y determinando los valores para 0,0.5,1,2.5,10ω = y ω →∞ . Trazar el diagrama de Nyquist. Para considerar el trayecto o recorrido de Nyquist modificado alrededor del origen en el plano s , realizar la transformación de los puntos del plano s que se muestran en la figura 5.20.
Figure 5.20 Recorrido de Nyquist modificado para el ejemplo 5.2
Determinar la estabilidad absoluta del sistema en lazo cerrado para 0.25,0.5K = y 1, aplicando el criterio de estabilidad de Nyquist. c) Relacionar los resultados de los apartados a) y b). Razonar la respuesta. Solución: a) El Lugar Geométrico de las raíces resultante puede observarse en la figura
5.21, donde únicamente existe una asíntota que corresponde con el eje real y aparecen puntos de ruptura en 3s = − , como puede comprobarse:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.21 LGR para el sistema del ejemplo 5.2
32 2 3
2
27; 0 3 ( 1) 2( 1) 0 3( 1) 4
s dKK s s s s s Ks ds
= − = ⇒ + − + = ⇒ = − ⇒ =+
Aplicando el algoritmo de Routh Hurwitz a la ecuación característica:
3 2 2 0s Ks Ks K+ + + = El corte con el eje imaginario ocurre para s j= ± , donde 1/ 2K = . Entonces, el sistema es estable para: 1/ 2K > b) Diagrama polar:
2 2 2 2
3 3 3 2 3
( 1) ( 1) 1 2 2 1( ) ( )s j j KG s K G j K K jKs j j
ω ω ω ωωω ω ω ω
+ + + + −= ⇒ = = = − +
− −
[ ] [ ]2
2 3
2 1Re ( ) ; Im ( )KG j G j K ωω ωω ω
−= − =
A partir de estas expresiones puede realizarse el siguiente cuadro:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ]Re ( )G jω [ ]Im ( )G jω
0ω = −∞ ∞ 0.5ω = 8K− 6K 1ω = 2K− 0 2ω = / 2K− 3 / 8K− 5ω = 2 / 25K− 24 /125K−
10ω = 2 /100K− 94 /1000K− ω = ∞ 0− 0−
En la figura 5.22 puede observarse el diagrama polar. El diagrama de Nyquist se forma a partir del diagrama polar realizando los rodeos en infinito adecuados, debido a la aparición de un polo en lazo abierto en origen. Para ello, se realizan las transformaciones de los puntos ( , , , y )A B C D Ds s s s s que se muestra en el enunciado del problema.
js e θε=
2 3
3 3
( 1)( ) ; ya que 0( )
j j
j
e eG s K Ke
θ θ
θ
ε εε ε
−+= → →
De este modo se puede obtener el siguiente cuadro:
Punto inicial Punto transformado
3jAs e
πε −= je π∞
6jBs e
πε −= 2je
π∞
0jCs eε= 0je∞
6jDs e
πε= 2je
π−∞ 3j
Es eπ
ε= je π−∞
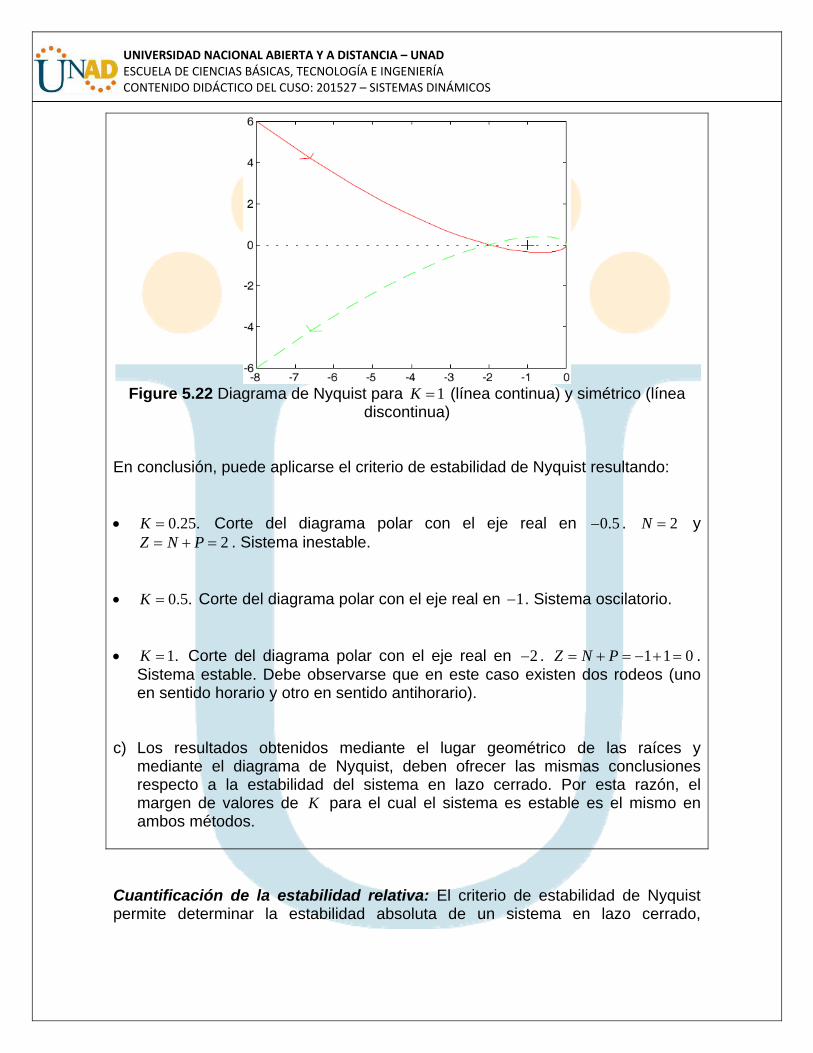
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.22 Diagrama de Nyquist para 1K = (línea continua) y simétrico (línea
discontinua) En conclusión, puede aplicarse el criterio de estabilidad de Nyquist resultando: • 0.25.K = Corte del diagrama polar con el eje real en 0.5− . 2N = y
2Z N P= + = . Sistema inestable. • 0.5.K = Corte del diagrama polar con el eje real en 1− . Sistema oscilatorio. • 1.K = Corte del diagrama polar con el eje real en 2− . 1 1 0Z N P= + = − + = .
Sistema estable. Debe observarse que en este caso existen dos rodeos (uno en sentido horario y otro en sentido antihorario).
c) Los resultados obtenidos mediante el lugar geométrico de las raíces y
mediante el diagrama de Nyquist, deben ofrecer las mismas conclusiones respecto a la estabilidad del sistema en lazo cerrado. Por esta razón, el margen de valores de K para el cual el sistema es estable es el mismo en ambos métodos.
Cuantificación de la estabilidad relativa: El criterio de estabilidad de Nyquist permite determinar la estabilidad absoluta de un sistema en lazo cerrado,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
observando, para ello, la cantidad de raíces de la ecuación característica existentes en semiplano derecho del plano s . Cuando el diagrama polar del sistema en lazo abierto contenga al punto 1 0j− + (ver figura 5.23), el criterio de estabilidad de Nyquist queda indeterminado. En esta situación, existe una frecuencia para la cual la ecuación característica tiene una solución de la forma
( ) 1LA cG jω = − , esto es, existe una raíz en cs jω= , lo cual implica que el sistema en lazo cerrado es oscilatorio.
Figure 5.23 Diagrama polar que contiene al punto 1 0j− +
Para mostrar la propiedad anteriormente comentada, obsérvese el lugar geométrico de las raíces (figura 5.24) y los diagramas de Nyquist (figura 5.25) del sistema:
1( )
( 1)( 2)( 3)LAG ss s s
=+ + +
En estas gráficas se comprueba como para 60K = el sistema es oscilatorio, para
10K = es estable y para 200K = el sistema es inestable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.24 LGR del sistema de ejemplo
Figure 5.25 Diagrama de Nyquist para 10,60 y 200K =
• En sistemas de fase mínima, cuanto más cerca se ubique el diagrama polar de
( )LAG jω del punto 1 0j− + , más riesgo de inestabilidad presenta el sistema. De este modo, se puede utilizar la proximidad de ( )LAG jω al punto 1 0j− + como una medida de la estabilidad relativa del sistema. Cuantitativamente se puede definir la estabilidad relativa como una medida de la cercanía del sistema a la inestabilidad. La medida del margen de fase y margen de ganancia permite

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
determinar el grado de estabilidad relativa del sistema. Así, cuando estos parámetros adquieren un valor elevado, el sistema se encuentra alejado de la inestabilidad y presentará una respuesta con un valor bajo de máximo sobreimpulso en su dinámica.
En las figuras 5.26 y 5.27 pueden observarse las mediciones del margen de fase y el margen de ganancia en el diagrama polar para diversos valores de K del sistema:
1( )( 1)( 2)( 3)LAG ss s s
=+ + +
Figure 5.26 Medición del MF y del MG en el diagrama polar para 30K =

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.27 Medición del MF y del MG en el diagrama polar para 100K =
Lección 5: RESPUESTA FRECUENCIAL DE SISTEMAS EN TIEMPO DISCRETO Dado el sistema discreto de la figura:
Figure 5.28 Sistema de tiempo discreto
Donde,
[ ] sin( ) sin( )( )j T j T
z TE z tz e z eω ω
ωω −= =− −
Z (5.24)
En el sistema definido, se obtiene el régimen permanente senoidal considerando la respuesta del sistema estable cuando el tiempo tiende a infinito y se posee una señal de entrada senoidal.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
( ) sin( )
( )( )j T j T
G z z TC zz e z eω ω
ω−=
− − (5.25)
Para obtener la transformada Z inversa debe desarrollarse ( )C z en fracciones parciales:
1 2( ) ( )gj T j T
K z K zC z C zz e z eω ω−= + +− −
(5.26)
Los dos primeros términos del desarrollo son originados por las raíces de la transformada Z de la señal senoidal muestreada, mientras que ( )gC z los términos debidos a los polos de ( )G z . Dado que el RPS únicamente existe en sistemas estables:
1 ( ) ( ) 0 cuando g gC z c kT k− ⎡ ⎤ = → →∞⎣ ⎦Z (5.27) Denominando ( )ssC z a la transformada Z de la señal que perdura cuando el tiempo crezca infinitamente (estado estacionario):
1 2( )ss j T j T
K z K zC zz e z eω ω−= +− −
(5.28)
Calculando los residuos:
1 2( ) ( )( ) ;2 2j T
j T j T j T
z e
z e G e G eK C z Kz j jω
ω ω ω−
=
−= = = (5.29)
Debe observarse que,
( ) ( ) j Tj T
z eG e G z ω
ω=
= Es la respuesta frecuencial del sistema discreto; esto es, debe evaluarse la función de transferencia z en un punto ubicado sobre el círculo de radio uno y con fase Tω respecto a origen, donde existe una dependencia respecto a la señal de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
entrada. Obviamente, la evaluación de la función planteada en plano z resulta difícil, debido a que no pueden utilizarse técnicas asintóticas para resolverla. A partir de la descripción del procedimiento de cálculo puede indicarse que
( )j TG e ω es una función de variable compleja, y se verifica que:
( )( ) ( )j Tj T j T j G eG e G e eωω ω ∠= (5.30)
( ) ( )( ) ( ) ( )
j T j Tj T j T j G e j T j G eG e G e e G e eω ωω ω ω−− − ∠ − ∠= = (5.31)
Realizando la transformada Z inversa de la ecuación de ( )ssC z , se obtiene:
( ) ( )1 2( )k kj T j T
ssc kT K e K eω ω−= + (5.32) Sustituyendo las expresiones de 1 2y K K :
( ) ( )( )
( ) ( )
( ) ( ) ( ) sin ( )2
j T j Tj kT G e j kT G ej T j T j T
sse ec kT G e G e kT G e
j
ω ωω ωω ω ωω
+∠ − +∠⎡ ⎤−⎢ ⎥= = +∠⎢ ⎥⎣ ⎦
(5.33)
En conclusión, la respuesta de un sistema discreto en RPS es una señal senoidal con igual frecuencia que la señal de entrada, con amplitud igual al producto de la amplitud de entrada por el módulo de la respuesta frecuencial y con fase igual a la suma de fases de la señal de entrada y la fase de su respuesta frecuencial. De este modo, no es necesario realizar la transformada Z inversa para determinar cuál es la salida de un sistema de tiempo discreto estable en RPS. Existen importantes diferencias entre la respuesta frecuencial de un sistema de tiempo continuo y la respuesta frecuencial de un sistema de tiempo discreto; entre estas consideraciones a tener en cuenta, destacan: • Es periódica de periodo sω , dado el efecto de bandas repetidas en plano s que
se produce en un sistema muestreado. Así, en conclusión, la respuesta frecuencial no debe evaluarse, en general, en el plano z , debido a que se realizarán múltiples vueltas sobre el círculo de radio uno en el plano z a medida que aumente la frecuencia de la señal de entrada.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• La respuesta frecuencial trazada en plano transformado bilineal ( )w no será
periódica, debido a que únicamente contiene la información de la banda primaria del sistema discreto en plano s . Sin embargo, esta sentencia no es muy importante, dado que, en su funcionamiento correcto, el sistema discreto utilizará señales que verificarán el teorema de Shannon. Ello conlleva un análisis detallado de la evaluación de la respuesta frecuencial mediante la transformada bilineal, debido a que la información aparece con una distorsión en el eje frecuencial; en conclusión, deberá considerarse la relación no lineal existente entre la frecuencia bilineal y la frecuencia real de la señal.
• Aplicando la transformada bilineal:
12
12
( ) ( ) ( ) ( )w
T wwz w jT w
G w G z G j G wω
ω+= =−
= ⇒ = (5.34)
Pueden trazarse mediante métodos asintóticos los diagramas de Bode de ( )wG jω y ( )wG jω∠ , que ofrecen la información de la respuesta frecuencial evaluada sobre la banda primaria, considerando:
12 2tan tan2 2w
wT T
T Tω ωω ω− ⎛ ⎞ ⎛ ⎞= ⇒ = ⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠ (5.35)
Cuando el número de muestras por ciclo sea elevado, el sistema continuo equivalente tendrá un diagrama de Bode similar, sin distorsión, al sistema discreto. Sin embargo, a medida que aumenta la frecuencia de la señal de entrada, el número de muestras por ciclo disminuye, observándose diferencias entre los diagramas de Bode del sistema continuo y del sistema discreto obtenido mediante la transformada bilineal. A partir del diagrama de Bode, puede trazarse el diagrama polar de un sistema discreto, y de este modo es posible aplicar el criterio de estabilidad de Nyquist. Debe observarse que la distorsión sufrida en la transformación de frecuencias no es relevante en el diagrama polar, determinándose la estabilidad absoluta y relativa del sistema discreto sin ninguna consideración adicional, es decir, sin necesidad de conocer el número de muestras por ciclo de la señal de salida. En conclusión, podrán definirse los conceptos de margen de fase (MF) y margen de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
ganancia (MG) en el plano transformado bilineal ( w ), análogamente a como ocurría en sistemas de tiempo continuo. Si se garantiza frecuencialmente una buena estabilidad relativa, el sistema discreto responderá adecuadamente, con independencia del número de muestras por ciclo y del número de muestras por constante de tiempo. En el diseño en el dominio temporal, estos parámetros debían observarse para garantizar una buena descripción de la respuesta del sistema discreto. Ejemplo 5.3 Dado el sistema de la figura:
Figure 5.29 Sistema discreto en lazo abierto
Donde,
1 10( ) ; ( ) ; ( ) ( ) ( )10
sT
oh p oh peG s G s G s G s G ss s
−−= = =
+
a) Con 0.01 segT = encontrar la transformada bilineal de ( )G s { }( )G w . Comparar
los polos y ceros, así como la ganancia en continua (para 0, 0w s= = ) de la función ( )G w con los de la función ( )pG s . ¿Queda distorsionado el diagrama de Bode de la función de transferencia ( )G w respecto al diagrama de Bode de
( )pG s a bajas frecuencias? Razonar la respuesta. b) Con 1 segT = encontrar la transformada bilineal de ( )G s { }( )G w . Comparar los
polos y ceros, así como la ganancia en continua (para 0, 0w s= = ) de la función ( )G w con los de la función ( )pG s . ¿Queda distorsionado el diagrama de Bode
de la función de transferencia ( )G w respecto al diagrama de Bode de ( )pG s a bajas frecuencias? Razonar la respuesta.
Dado el sistema en lazo cerrado de la figura:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 5.30 Sistema discreto en lazo cerrado
c) Encontrar la función de transferencia ( ) / ( )C s R s del sistema continuo,
eliminando el muestreador y el retenedor de datos. d) Calcular el número de muestras por constante de tiempo del sistema del
apartado anterior si se muestrea la señal de salida con un periodo de 0.01 segT = . ¿Y con 1 segT = ? Relacionar los resultados obtenidos con los
apartados a) y b). e) Encontrar la función de transferencia ( ) / ( )C z R z para 0.01 segT = y para
1 segT = . Trazar los diagramas de polos y ceros en lazo cerrado (en ambos casos) y razonar los resultados, relacionándolos con los obtenidos en los apartados anteriores.
Solución: a) Para 0.01 segT = :
1 10 0.0952 0.0952 0.0952(1 0.005 )( ) (1 ) ; ( ) 1 0.005( 10) 0.9048 0.0952 0.00950.90481 0.005
wG z z G w ws s z ww
− ⎡ ⎤ −= − = = =⎢ ⎥ ++ − +⎣ ⎦ −
−
Z

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Ambas respuestas frecuenciales mantienen la misma posición respecto a sus polos y ganancia en continua. Pero la función ( )G w tiene un cero finito más, aunque está situado muy a la derecha, es decir a altas frecuencias, y por tanto el diagrama de Bode no queda distorsionado a bajas frecuencias. b) Para 1 segT = :
15
5
10 1 1 1 0.5( ) (1 ) ; ( ) 1 0.5( 10) 4.53 10 1 0.54.53 101 0.5
wG z z G w ws s z ww
−−
−
⎡ ⎤ −= − = = =⎢ ⎥ ++ − × +⎣ ⎦ − ×
−
Z
polo en 2
( ) :cero en 2
wG w
w= −⎧
⎨ =⎩
El cero que se introduce se sitúa sobre el polo produciendo una cancelación cero–polo en el módulo de la respuesta frecuencial, dando lugar a un diagrama de Bode plano en módulo y una variación de fase asintóticamente a 180º− . Con lo cual sí que se distorsiona el diagrama de Bode. c) Diagrama de bloques del sistema continuo

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
d) La constante de tiempo es:
1 0.0520
τ = =
Para 0.01 segT = se tiene:
0.05 5 muestras/cte de tiempo0.01T
τ= =
Para 1 segT = se tiene:
0.05 0.05 muestras/cte de tiempo1T
τ= =
Para 1 segT = no se tiene ni una muestra por constante de tiempo y por eso se distorsiona la transformada bilineal. Para 0.01 segT = el número de muestras es suficiente y la transformada bilineal no queda distorsionada. e)
( ) 0.09520.01( ) 0.8096( ) ( )
( ) 1( ) 1 ( ) 1( ) 1
C zTR z zC z G zC zR z G z TR z z
⎧ = ⇒ =⎪ −⎪= ⇒ ⎨+ ⎪ = ⇒ =⎪ +⎩
La zona donde deberían ubicarse los polos para garantizar una buena simulación análoga equivalente es aquella que rodea al punto 1z = en el interior del círculo unitario. • Para 0.01 seg polo 0.809 se sitúa dentro de la zonaT z= ⇒ = ⇒ • Para 1 seg polo 1 se sitúa fuera de la zonaT z= ⇒ = − ⇒ , y por esto el sistema
continuo análogo queda distorsionado.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
6. CAPITULO 6: ANÁLISIS DEL LGR Y DEL ESPACIO DE ESTADOS INTRODUCCIÓN Debido a la necesidad de conocer los polos de un sistema en lazo cerrado, que determinarán las características básicas de la respuesta transitoria, se desarrolla el método del lugar geométrico de las raíces – LGR – (también denominado Lugar de Evans). Este método permite ubicar en un gráfico los polos de un sistema en lazo cerrado a partir del conocimiento de los polos en lazo abierto, en función de un parámetro variable. Para ello considérese la ecuación característica de un sistema en lazo cerrado:
1 ( ) ( ) ( ) 0 1 ( ) 0 ( ) 1c LA LAG s G s H s G s G s+ = ⇒ + = ⇒ = − (6.1) La resolución de esta ecuación implica la verificación de dos condiciones: • Condición de ángulo: { }arg ( ) 180º (2 1);LAG s λ λ= ± + ∈N • Condición de módulo: ( ) 1LAG s = Debe observarse que, de este modo, se pasa del estudio del sistema en lazo cerrado al estudio de características del sistema en lazo abierto, lo cual debe permitir mayor facilidad en el cálculo. Se define el lugar geométrico de las raíces como el conjunto de puntos del plano s en los que se verifica la condición de ángulo. En conclusión, un punto que pertenece al lugar geométrico de las raíces es un posible polo del sistema en lazo cerrado; para ello únicamente es necesario validar la condición de módulo, y ésta se cumplirá para un valor determinado de la ganancia del sistema en lazo abierto. Sin embargo, un punto del plano s que no pertenezca al LGR no puede ser polo en lazo cerrado porque no verifica la condición de ángulo, aunque varíe la ganancia del sistema en lazo abierto. De este modo, variando el parámetro K :

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1
1
( ) ( )( ) ; 0( ) ( )
mLA
n
s z s zG s K Ks p s p+ +
= ≤ < ∞+ +
(6.2)
Se logra trazar el lugar geométrico de las raíces que proporciona los valores de los polos en lazo cerrado en función de K . Por otra parte, dado que un sistema moderno complejo posee muchas entradas y muchas salidas que se relacionan entre sí en una forma complicada. Para analizar un sistema de este tipo, es esencial reducir la complejidad de las expresiones matemáticas, además de recurrir a una computadora que realice gran parte de los tediosos cálculos necesarios en el análisis. El enfoque en el espacio de estados para el análisis de sistemas es el más conveniente desde este punto de vista. En tanto que la teoría de control convencional se basa en la relación entrada-salida, o función de transferencia, la teoría de control moderna se basa en la descripción de las ecuaciones de un sistema en términos de n ecuaciones diferenciales de primer orden, que se combinan en una ecuación diferencial matricial de primer orden. El uso de la notación matricial simplifica enormemente la representación matemática de los sistemas de ecuaciones. El incremento en la cantidad de variables de estado, de entradas o de salidas no aumenta la complejidad de las ecuaciones. De hecho, el análisis de los sistemas complicados con entradas y salidas múltiples se realiza mediante procedimientos sólo ligeramente más complicados que los requeridos para el análisis de sistemas de ecuaciones diferenciales escalares de primer orden. Este capítulo aborda el análisis de los sistemas de control en el espacio de estados. El material básico de análisis en el espacio de estados, incluyendo la representación de sistemas en el espacio de estados, la controlabilidad y la observabilidad, se presenta a continuación. Lección 1: REGLAS DE CONSTRUCCIÓN DEL LUGAR DE LAS RAÍCES Dado que los polos y ceros complejos de la función de transferencia en lazo abierto tienen asociados sus complejos conjugados, el LGR será simétrico respecto al eje real. Las reglas para construir el LGR se resumen a continuación:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1) Trazar el diagrama polos y ceros en lazo abierto Sea la ecuación característica de un sistema dinámico:
10 1 1 1
10 1 1 1
( ) ( )1 ( ) 0 1 0 1 0( ) ( )
m mm m m
LA n nn n n
b s b s b s b s z s zG s Ka s a s a s a s p s p
−−
−−
+ + + + ++ = ⇒ + = ⇒ + =
+ + + + + (6.3)
Donde,
is z= − son ceros y is p= − son polos en lazo abierto
Figure 6.1 Polos y ceros en lazo abierto
2) Lugar geométrico de las raíces sobre el eje real Los polos y ceros complejos conjugados no afectan en la evaluación del LGR sobre el eje real, dado que en su contribución suman múltiplos de 360º. Observando, únicamente, los polos y ceros en lazo abierto sobre el eje real, puede aplicarse la siguiente consideración: un punto del eje real pertenece al LGR cuando el número de total de polos y ceros a su derecha es impar (la suma angular total será un múltiplo de 180º).
Figure 6.2 LGR sobre el eje real

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
3) Puntos de inicio y final del LGR El trazado del lugar geométrico de las raíces se inicia en los polos en lazo abierto y finaliza en los ceros en lazo abierto (en este caso, deben considerarse los ceros infinitos). Puede demostrarse esta sentencia resolviendo: • Inicio en polos de lazo abierto:
1 1
0 01 1
( ) ( ) ( ) ( )1 1lim lim( ) ( ) ( ) ( )
m m
K Kn n
s z s z s z s zs p s p K s p s p K→ →
⎡ ⎤+ + + + ⎡ ⎤= − ⇒ = − = ∞⎢ ⎥ ⎢ ⎥+ + + + ⎣ ⎦⎣ ⎦ (6.4)
Para que esta expresión sea cierta es necesario que is p→− . En conclusión, los polos en lazo cerrado coinciden con los polos en lazo abierto cuando 0K = . Debe indicarse que, lógicamente, este efecto es relevante únicamente a nivel analítico, dado que no es posible tener 0K = a nivel real. • Final en ceros en lazo abierto:
1 1
1 1
( ) ( ) ( ) ( )1 1lim lim 0( ) ( ) ( ) ( )
m m
K Kn n
s z s z s z s zs p s p K s p s p K→∞ →∞
⎡ ⎤+ + + + ⎡ ⎤= − ⇒ = − =⎢ ⎥ ⎢ ⎥+ + + + ⎣ ⎦⎣ ⎦ (6.5)
Para que esta expresión sea cierta es necesario que is z→− ó s →∞ (en el caso para el cual el grado del denominador sea mayor que el grado del numerador). En conclusión, los polos en lazo cerrado coinciden con los ceros en lazo abierto cuando K →∞ . Así el lugar geométrico puede tener ramas que finalicen en infinito; ahora bien, dado que el sistema es causal nunca puede iniciarse el LGR en infinito.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 6.3 Inicio y final del LGR
El LGR se origina en los polos en lazo abierto y finaliza en los ceros en lazo abierto (finitos e infinitos). El número de ramas del lugar geométrico indica el número de polos en lazo cerrado y coincide con el número de polos en lazo abierto y el número de ceros en lazo abierto (finitos e infinitos). 4) Asíntotas del LGR El estudio asintótico se realiza para s →∞ . En ese caso, las contribuciones angulares por parte de todas las raíces son prácticamente iguales, y existe un efecto de cancelación de contribución angular entre polos y ceros. De este modo, la expresión de los ángulos de las asíntotas vendrá dada por:
180º (2 1)Asíntotan m
λ± +∠ =
− (6.6)
Donde n y m son los grados de denominador y numerador de la función de transferencia en lazo abierto, respectivamente, y λ es un número natural.
Figure 6.4 Asíntotas del LGR
Para demostrar esta expresión debe considerarse la ecuación característica:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
( ) ( ) ( ) 1 ( ) 1c LAG s G s H s G s= − ⇒ = −
1 1
1 1
( ) ( ) ( ) ( )1 lim( ) ( ) ( ) ( )
m mn ms
n n
s z s z s z s z KK Ks p s p s p s p s −→∞
⎡ ⎤+ + + += − ⇒ →⎢ ⎥+ + + +⎣ ⎦
Recordando la condición de ángulo:
{ } 180º (2 1)arg ;sn m
λ λ± += ∈
−N
Así por ejemplo, si 3n m− = entonces
{ }60º 0
180º (2 1)arg 180º 13
300º 2s
λλ λ
λ
± =⎧± + ⎪= = ± =⎨
⎪± =⎩
El punto de intersección de las asíntotas con el eje real, necesario para poder realizar el trazado de las asíntotas, viene dado por la expresión:
1 1
n m
i ji j
a
p z
n mσ = =
−=
−
∑ ∑ (6.7)
Figure 6.5 Ubicación de las asíntotas

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Debe observarse que en el caso de 1n m− = , esto es, poseer únicamente una asíntota, no debe calcularse el punto de intersección, dado que todo el eje real constituye la propia asíntota. 5) Puntos de ruptura Por definición, un punto de ruptura en el LGR corresponde a una raíz múltiple de la ecuación característica, esto es, un punto de ruptura implica un polo en lazo cerrado múltiple. Debe resaltarse que los puntos de ruptura pueden ser reales o complejos conjugados. Los puntos de ruptura pueden dividirse en puntos de ruptura de dispersión (en los cuales el valor de K alcanza un máximo relativo) y puntos de ruptura de confluencia (para los cuales K alcanza un mínimo relativo).
Figure 6.6 Puntos de ruptura
Para determinar el procedimiento de cálculo de puntos de ruptura, se realiza la evaluación de K cuando aparece un punto de ruptura sobre el eje real, diferenciándose los casos: • LGR sobre eje real entre dos polos: En este caso, el punto de ruptura
aparece cuando K alcanza un máximo relativo, determinándose según la expresión:
1
1
( ) ( ) ( ) ( )1 ( ) 0 1 0 1 0( ) ( ) ( ) ( )
mLA
n
s z s z A s B sG s K K Ks p s p B s A s+ +
+ = ⇒ + = ⇒ + = ⇒ = −+ +
0 '( ) ( ) '( ) ( ) 0dK B s A s A s B sds
= ⇒ − =

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 6.7 LGR sobre eje real entre dos polos
Las soluciones de la ecuación anterior son puntos de ruptura si pertenecen al LGR y la K asociada es real y positiva. Obviamente, las soluciones de la ecuación anterior pueden proporcionar puntos de ruptura complejo conjugados. • LGR sobre eje real entre dos ceros: En este caso, el punto de ruptura
aparece cuando K alcanza un mínimo relativo, determinándose análogamente al caso anterior.
Figure 6.8 LGR sobre eje real entre dos ceros

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
• LGR sobre eje real entre cero y polo: En este caso, existe la posibilidad de que no aparezcan puntos de ruptura, o bien, que existan en pares de dispersión y confluencia.
Figure 6.9 LGR sobre eje real entre cero y polo
6) Puntos de cruce del LGR con el eje imaginario
Figure 6.10 Puntos de cruce del LGR con el eje imaginario
Con el fin de encontrar los puntos de cruce con el eje imaginario se pueden aplicar los siguientes métodos: • Sustituir s jω= en la ecuación característica, igualando parte real e imaginaria
a cero:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Re( ) 01 ( ) ( ) 0 1 ( ) ( ) 0 Re( ) Im( ) 0
Im( ) 0G s H s G j H j j
ωω ω ω ω
ω=⎧
+ = ⇒ + = ⇒ + = ⇒ ⎨ =⎩
• Aplicando el algoritmo de Routh, anulando una fila de coeficientes. Por
ejemplo: 3 2 0s bs cs Kd+ + + =
3
2
1
0
1s cs b Kd
bc Kdsb
s Kd
−
Anulando filas,
0bc Kd bcKb d−
= ⇒ =
0K =
Usando el polinomio auxiliar:
2( ) 0aP s bs Kd s j c= + = ⇒ = ± 7) Ángulos de arranque y llegada Los ángulos de arranque del LGR de los polos en lazo abierto y los ángulos de llegada del LGR a los ceros en lazo abierto se determinan a partir de la distribución del diagrama de polos y ceros en lazo abierto. Para ello, se presupone un punto perteneciente al LGR suficientemente cercano a la singularidad sobre la que se quiere determinar el ángulo de partida o llegada como para poder considerarlo en la misma posición que la propia singularidad; de este modo, al aplicar la condición de ángulo todas las contribuciones angulares serán conocidas exceptuando el ángulo de arranque o llegada incógnita.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 6.11 Ángulos de arranque y llegada
Ejemplo 6.1 Dibujar el LGR de un sistema que presenta la siguiente función de transferencia en lazo abierto:
( )( )2 2
23( )
10 73LA
K sG s
s s s
−=
+ +
Solución: 1) Polos y ceros en lazo abierto
11
2,32
2 0 (doble)3ceros ; polos 5 2.06 (triple) 3
pzp jz
=⎧ ⎧=⎪ ⎪⎨ ⎨ = − ±= ∞⎪ ⎪⎩⎩
2) LGR en el eje real

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 6.12 Polos y ceros del ejemplo 6.1
3) Asíntotas
4 (No. de polos finitos) y 1 (No. de ceros finitos)n m= =
{ }60º 0
180º (2 1)arg 180º 13
300º 2s
λλ λ
λ
± =⎧± + ⎪= = ± =⎨
⎪± =⎩
4) Intersección de las asíntotas con el eje real
( )1 15 5 20 0 2.06 2.063 3 3 1.33
4 1
n m
i ji j
a
p z j j
n mσ = =
− + − + − − −= = = −
− −
∑ ∑
5) Puntos de ruptura Al no existir ninguna rama entre polo y cero, no se cumple la condición necesaria para que existan puntos de ruptura. Por tanto sólo se calcularán al final si las condiciones geométricas lo requieren. 6) Ángulos de arranque y llegada A continuación se calcula el ángulo de arranque de las ramas de los polos complejos conjugados. Para ello, en el polo 5 3 2.06j− + se toma un punto P de su entorno tal que LGRP∈ .
{ } [ ]1 1 2 3arg 2 180º (2 1)P θ φ φ φ λ= − + + = ± +
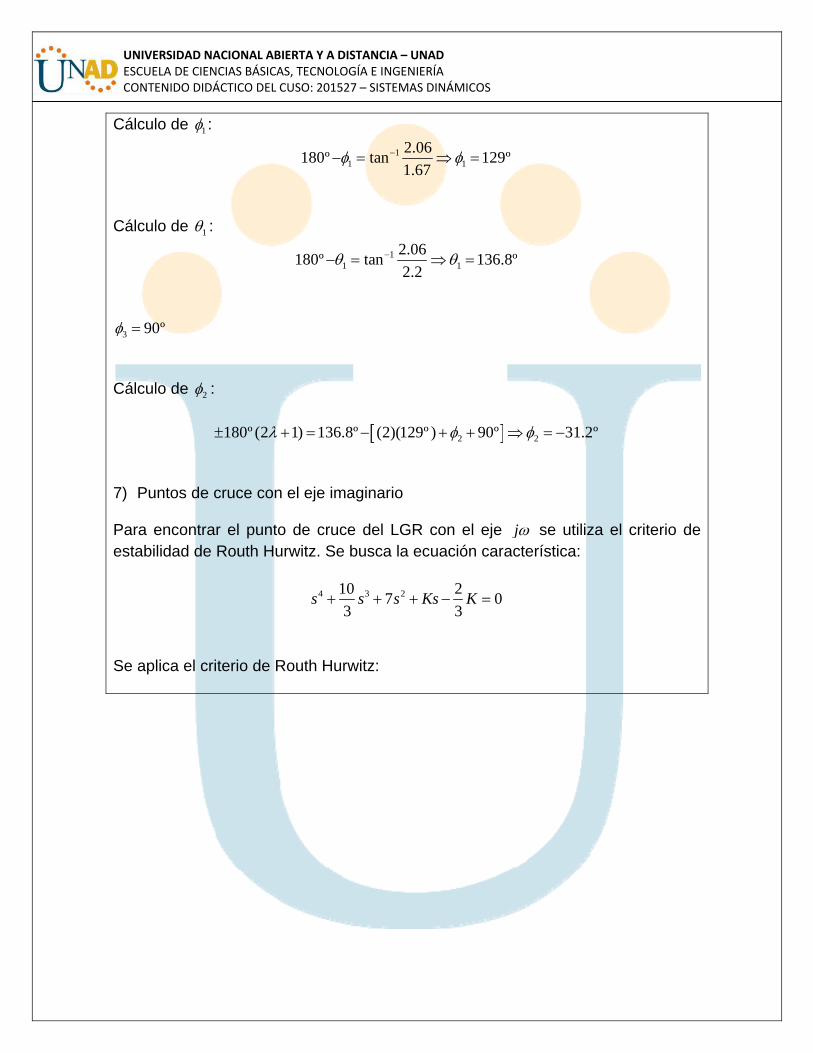
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Cálculo de 1φ : 1
1 12.06180º tan 129º1.67
φ φ−− = ⇒ =
Cálculo de 1θ :
11 1
2.06180º tan 136.8º2.2
θ θ−− = ⇒ =
3 90ºφ = Cálculo de 2φ :
[ ]2 2180º (2 1) 136.8º (2)(129º ) 90º 31.2ºλ φ φ± + = − + + ⇒ = − 7) Puntos de cruce con el eje imaginario Para encontrar el punto de cruce del LGR con el eje jω se utiliza el criterio de estabilidad de Routh Hurwitz. Se busca la ecuación característica:
4 3 210 27 03 3
s s s Ks K+ + + − =
Se aplica el criterio de Routh Hurwitz:
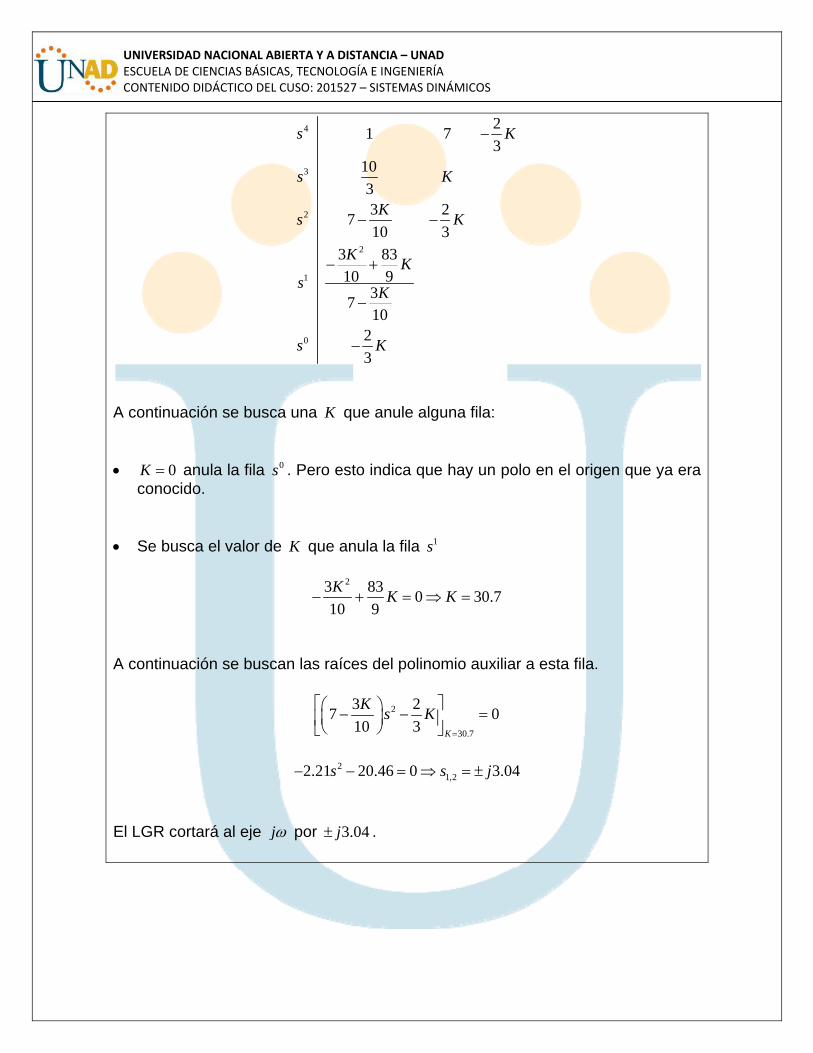
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
4
3
2
2
1
0
21 73
1033 2710 3
3 8310 9
3710
23
s K
s K
Ks K
K Ks K
s K
−
− −
− +
−
−
A continuación se busca una K que anule alguna fila: • 0K = anula la fila 0s . Pero esto indica que hay un polo en el origen que ya era
conocido. • Se busca el valor de K que anula la fila 1s
23 83 0 30.710 9K K K− + = ⇒ =
A continuación se buscan las raíces del polinomio auxiliar a esta fila.
2
30.7
3 27 010 3 K
K s K=
⎡ ⎤⎛ ⎞− − =⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
2
1,22.21 20.46 0 3.04s s j− − = ⇒ = ± El LGR cortará al eje jω por 3.04j± .

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 6.13 LGR del ejemplo 6.1
Ejemplo 6.2 Dibujar el LGR de un sistema que presenta la siguiente función de transferencia en lazo abierto:
( )( )2
2( )
1LA
K sG s
s+
=+
Solución: 1) Polos y ceros en lazo abierto
{11
2
2ceros ; polos 1 (doble)
zp
z= −⎧
= −⎨ = ∞⎩
2) LGR en el eje real

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 6.14 Polos y ceros del ejemplo 6.2
3) Asíntotas
2 (No. de polos finitos) y 1 (No. de ceros finitos)n m= =
{ }180º 0180º (2 1)arg540º 11
sλλλ
± =⎧± += = ⎨± =⎩
La única asíntota es el eje real negativo. 4) Intersección de las asíntotas con el eje real Serán todos los puntos del semieje real negativo. 5) Puntos de ruptura Existe una rama de ceros, por tanto existirá como mínimo un punto de ruptura. De la ecuación característica se obtiene:
2( 1)( 2)sKs+
= −+
2
2
2( 1)( 2) ( 1) 0( 2)
dK s s sds s
+ + − += − =
+
12
2
14 3 0
3r
r
ss s
s= −⎧
+ + = ⇒ ⎨ = −⎩
Los dos puntos pertenecen al LGR y poseen 1( ) 0rK s = y 2( ) 4rK s = mayores o iguales a cero y por tanto son puntos de ruptura.
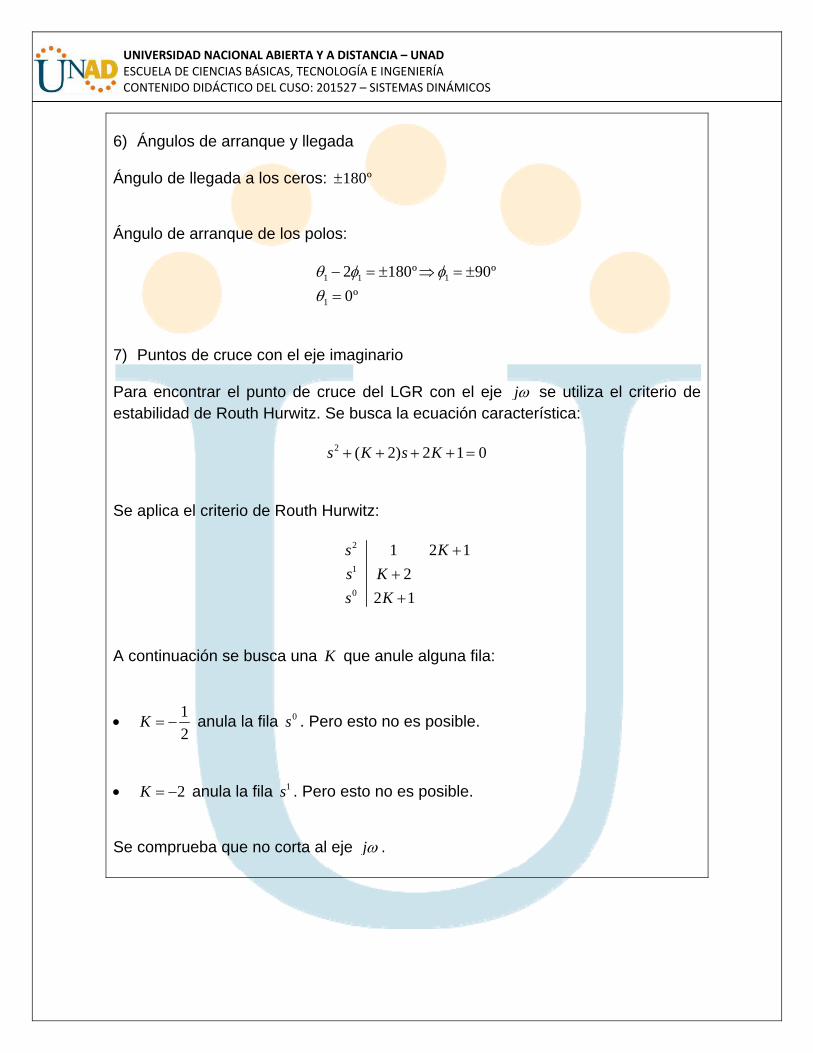
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
6) Ángulos de arranque y llegada Ángulo de llegada a los ceros: 180º± Ángulo de arranque de los polos:
1 1 1
1
2 180º 90º0º
θ φ φθ− = ± ⇒ = ±=
7) Puntos de cruce con el eje imaginario Para encontrar el punto de cruce del LGR con el eje jω se utiliza el criterio de estabilidad de Routh Hurwitz. Se busca la ecuación característica:
2 ( 2) 2 1 0s K s K+ + + + = Se aplica el criterio de Routh Hurwitz:
2
1
0
1 2 12
2 1
s Ks Ks K
+++
A continuación se busca una K que anule alguna fila:
• 12
K = − anula la fila 0s . Pero esto no es posible.
• 2K = − anula la fila 1s . Pero esto no es posible. Se comprueba que no corta al eje jω .

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 6.15 LGR del ejemplo 6.2
La determinación de los ceros en lazo cerrado debe realizarse cuidadosamente, dado que no aparecen de un modo directo en el LGR y su influencia es importante en la respuesta del sistema. Observando las topologías que se muestran en la figura 6.16, puede decirse que los ceros en lazo cerrado son los ceros en lazo directo conjuntamente con los polos del elemento de medida.
Figure 6.16 Evaluación de los ceros en lazo cerrado
Las funciones de transferencia en lazo cerrado de los sistemas descritos son:
2 2
( ) ( 1)( 2) ( ) ( 2)y( ) ( 1) ( 2) ( ) ( 1) ( 2)
C s K s s C s K sR s s K s R s s K s
+ + += =
+ + + + + +

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Los dos sistemas tienen la misma ecuación característica, lo cual implica que tienen los mismos polos en lazo cerrado para el mismo valor de K . El trazado del lugar geométrico de las raíces es el mismo, pero los ceros en lazo cerrado son diferentes debido al efecto de la función de transferencia del elemento de medida. De este modo, para conocer los ceros en lazo cerrado es necesario observar la estructura concreta del sistema. Interesará minimizar el efecto del cero de lazo cerrado introducido por el elemento de medida; para ello, deberá alejarse substancialmente del eje imaginario del plano s respecto a los polos en lazo cerrado. En conclusión, los polos del elemento de medida deben tener constantes de tiempo mucho menores que las características de la planta, esto es, el elemento de medida debe “procesar” muy rápidamente la información respecto a la respuesta transitoria de la planta. Lección 2: ASPECTOS IMPORTANTES EN LA CONSTRUCCIÓN DEL LGR 1. EFECTOS DE ADICIÓN DE POLOS Y CEROS La adición de un polo a la función de transferencia en lazo abierto ( )LAG s en el semiplano izquierdo del plano s tiene el efecto de “empujar” el LGR hacia el semiplano derecho. De este modo, manteniendo la ganancia del sistema, su dinámica tenderá a empeorar.
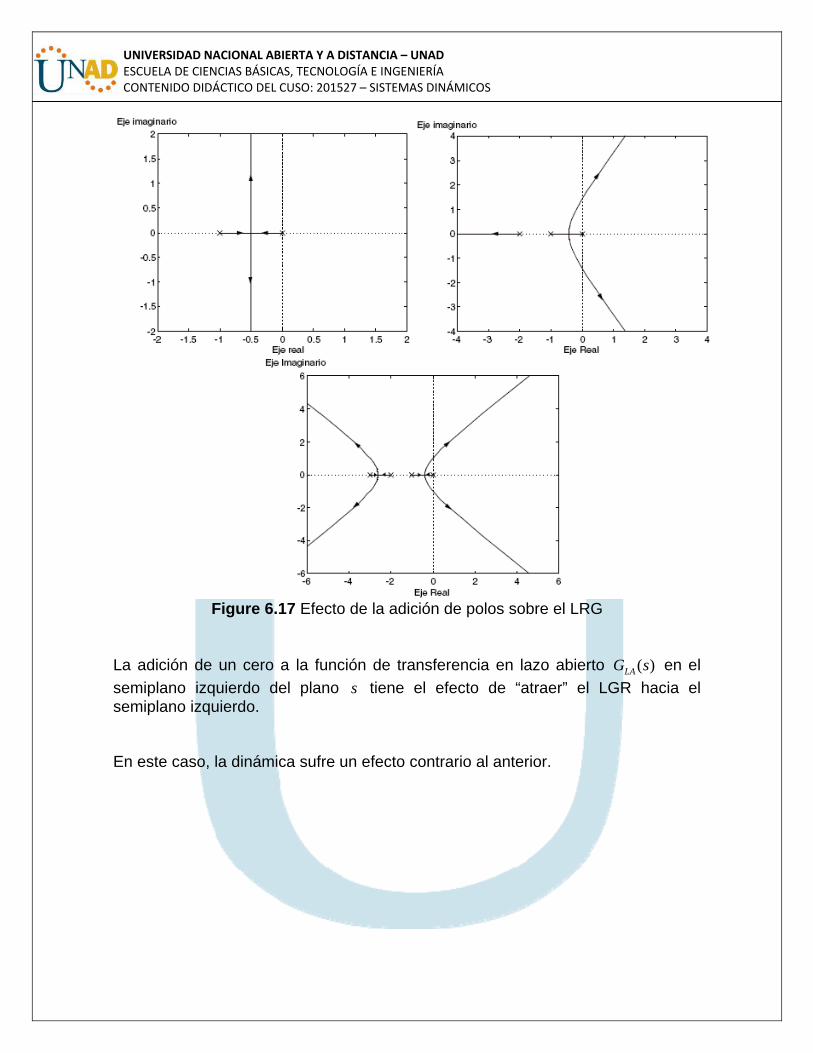
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 6.17 Efecto de la adición de polos sobre el LRG
La adición de un cero a la función de transferencia en lazo abierto ( )LAG s en el semiplano izquierdo del plano s tiene el efecto de “atraer” el LGR hacia el semiplano izquierdo. En este caso, la dinámica sufre un efecto contrario al anterior.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Figure 6.18 Efecto de la adición de un cero sobre el LGR
2. EFECTOS DE MOVIMIENTOS DE POLOS Y CEROS A medida que un polo en lazo abierto se acerca al eje imaginario, las ramas del LGR se acercan más al semiplano derecho. Observaríamos el efecto contrario en el caso del movimiento de un cero en lazo abierto.
Figure 6.19 Efecto del movimiento de un polo hacia el semiplano derecho
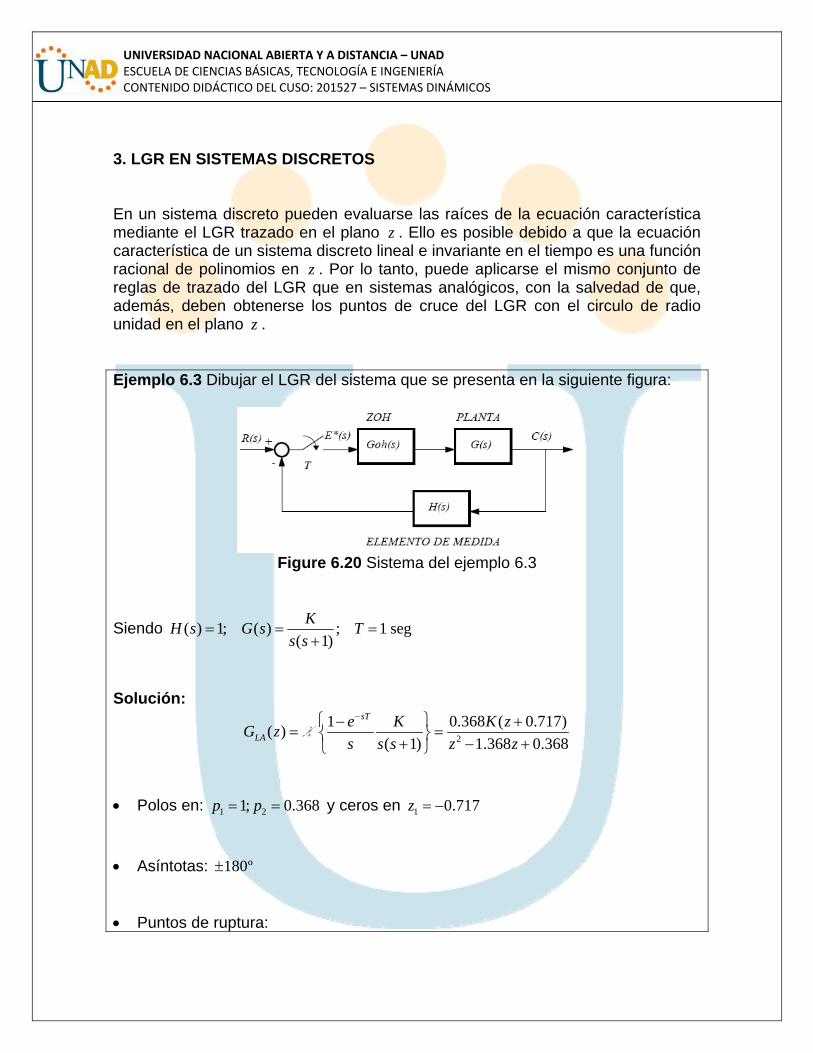
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
3. LGR EN SISTEMAS DISCRETOS En un sistema discreto pueden evaluarse las raíces de la ecuación característica mediante el LGR trazado en el plano z . Ello es posible debido a que la ecuación característica de un sistema discreto lineal e invariante en el tiempo es una función racional de polinomios en z . Por lo tanto, puede aplicarse el mismo conjunto de reglas de trazado del LGR que en sistemas analógicos, con la salvedad de que, además, deben obtenerse los puntos de cruce del LGR con el circulo de radio unidad en el plano z . Ejemplo 6.3 Dibujar el LGR del sistema que se presenta en la siguiente figura:
Figure 6.20 Sistema del ejemplo 6.3
Siendo ( ) 1; ( ) ; 1 seg( 1)
KH s G s Ts s
= = =+
Solución:
2
1 0.368 ( 0.717)( )( 1) 1.368 0.368
sT
LAe K K zG zs s s z z
−⎧ ⎫− += =⎨ ⎬+ − +⎩ ⎭Z
• Polos en: 1 21; 0.368p p= = y ceros en 1 0.717z = − • Asíntotas: 180º± • Puntos de ruptura:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1 1
2 2
0.67; ( ) 0.1962.11; ( ) 15.01
r r
r r
z K zz K z
= == − =
• Corte con el eje imaginario: 1.161j± • Corte con el círculo unitario: Para calcular estos puntos se aplica el criterio de
Routh Hurwitz sobre el plano transformado w , ya que el círculo de radio uno del plano z se transforma mediante la transformada bilineal en el eje imaginario del plano w .
1 0.51 0.5
( ) ( ) wLA LA zw
G w G z +=−
=
2(1 0.038 ) (0.924 0.386 ) 0.9241 ( ) 0
( 0.924)LAK w K w KG w
w w− + − +
+ = =+
Si a continuación se aplica el criterio de Routh Hurwitz, se encuentra que el sistema será estable para 0 2.39K< < . Si se sustituye el valor límite de K en la ecuación característica, se encuentra la posición del LGR sobre el circulo unitario,
0.245 0.97 (módulo=1; fase= 75.8º)z j= ± ±
Figure 6.21 LGR del ejemplo 6.3
Por último, debe indicarse que disminuir el periodo de muestreo conlleva modificar

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
el LGR, de manera que aumenta el margen de valores de K para el cual el sistema es estable, y se produce un acercamiento de las ramas del LGR a 1z = , indicativo de la menor desvirtuación del sistema discreto frente al sistema continuo equivalente. Ejemplo 6.4 Dibujar el LGR del sistema que se presenta en el ejemplo 6.3, tomando 0.1 segT = . Solución: Con 0.1 segT = se obtiene el siguiente LGR:
Figure 6.22 LGR del ejemplo 6.4
Donde el rango de valores de K para el cual el sistema es estable es 0 20.3K< < . Se deja al estudiante la solución completa de este ejercicio como método de profundización en el tema. Lección 3: REPRESENTACIONES EN EL ESPACIO DE ESTADOS Existen muchas técnicas para obtener representaciones en el espacio de estados de los sistemas basados en la función de transferencia. Esta sección aborda las

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
representaciones en el espacio de estados en la forma canónica controlable, observable, diagonal o de Jordan. Considere un sistema definido mediante:
( ) ( 1) ( ) ( 1)1 1 0 1 1
n n m mn n m my a y a y a y b u b u b u b u− −− −+ + + + = + + + + (6.8)
Donde y es la salida y u es la entrada. Esta ecuación también se puede escribir como:
10 1 1
11 1
( )( )
m mm m
n nn n
b s b s b s bY sU s s a s a s a
−−
−−
+ + + +=
+ + + + (6.9)
A continuación se presentan las representaciones en el espacio de estados del sistema definido mediante estas ecuaciones en una forma canónica controlable, en una forma canónica observable y en una forma canónica diagonal (o de Jordan). 1. FORMA CANÓNICA CONTROLABLE La siguiente representación en el espacio de estados se denomina forma canónica controlable:
1 1
2 2
1 1
1 2 1
0 1 0 0 00 0 1 0 0
0 0 0 1 01
n n
n n n n n
x xx x
ux xx a a a a x− −
− −
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥= +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − − − ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(6.10)
[ ]1
20 1 1 0 1 1 0 0n n n n
n
xx
y b a b b a b b a b b u
x
− −
⎡ ⎤⎢ ⎥⎢ ⎥= − − − +⎢ ⎥⎢ ⎥⎣ ⎦
(6.11)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
La forma canónica controlable es importante cuando se analiza el enfoque de ubicación de polos para el diseño de sistemas de control. 2. FORMA CANÓNICA OBSERVABLE La siguiente representación en el espacio de estados se denomina forma canónica observable:
1 1 0
2 2 1 1 01
3 2 2 02
1
1 1 01
0 0 01 0 00 1 0
0 0 1
n nn
n nn
n nn
n
n n
x x b a bax x b a bax b a b ua
xx x b a ba
− −−
− −−
−
−−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ −−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥= + −−⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ −−⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(6.12)
[ ]1
200 0 1
n
xx
y b u
x
⎡ ⎤⎢ ⎥⎢ ⎥= +⎢ ⎥⎢ ⎥⎣ ⎦
(6.13)
3. FORMA CANÓNICA DIAGONAL Considere el sistema representado por la función de transferencia en la que el polinomio del denominador sólo contiene raíces distintas, la ecuación se escribe como:
10 1 1 1 2
01 2 1 2
( )( ) ( )( ) ( )
m mm m n
n n
b s b s b s b cc cY s bU s s p s p s p s p s p s p
−−+ + + +
= = + + + ++ + + + + +
(6.14)
La forma canónica diagonal de la representación en el espacio de estados de este sistema se obtiene mediante

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1 1 1
2 2 2
1 1 1
0 0 0 10 0 0 1
0 0 0 10 0 0 1
n n n
n n n
x p xx p x
ux p xx p x− − −
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥= +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥− ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(6.15)
[ ]1
21 2 0n
n
xx
y c c c b u
x
⎡ ⎤⎢ ⎥⎢ ⎥= +⎢ ⎥⎢ ⎥⎣ ⎦
(6.16)
4. FORMA CANÓNICA DE JORDAN A continuación considere el caso en el que el polinomio del denominador de la función de transferencia contiene raíces múltiples, para el cual la forma canónica diagonal anterior debe modificarse a la forma canónica de Jordan. Suponga, por ejemplo, que todas las ip , excepto las primeras tres, son diferentes entre sí, o sea
1 2 3p p p= = . En este caso, la forma factorizada de ( ) / ( )Y s U s se vuelve
10 1 1
31 4 5
( )( ) ( ) ( )( ) ( )
m mm m
n
b s b s b s bY sU s s p s p s p s p
−−+ + + +
=+ + + +
(6.17)
La expansión en fracciones parciales de esta última ecuación se convierte en
3 51 2 40 3 2
1 1 1 4 5
( )( ) ( ) ( )
n
n
c c cc c cY s bU s s p s p s p s p s p s p
= + + + + + + ++ + + + + +
(6.18)
Una representación en el espacio de estados de este sistema en la forma canónica de Jordan se obtiene mediante

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
1 1 1
2 1 2
3 1 3
4 4 4
1 0 0 0 00 1 00 0 0 0 10 0 0 0 1
0 0 0 0 1n n n
x p xx p xx p x
ux p x
x p x
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥−
= +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥
−⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(6.19)
[ ]1
21 2 0n
n
xx
y c c c b u
x
⎡ ⎤⎢ ⎥⎢ ⎥= +⎢ ⎥⎢ ⎥⎣ ⎦
(6.20)
Ejemplo 6.5 Obtener las representaciones en el espacio de estados en la forma canónica controlable, en la forma canónica observable y en la forma canónica diagonal, para el sistema representado mediante
2
( ) 3( ) 3 2
Y s sU s s s
+=
+ +
Solución: Forma canónica controlable:
1 1
2 2
0 1 02 3 1
x xu
x x⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤
= +⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦
[ ] 1
2
3 1x
yx⎡ ⎤
= ⎢ ⎥⎣ ⎦
Forma canónica observable:
1 1
2 2
0 2 31 3 1
x xu
x x−⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤
= +⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ] 1
2
0 1x
yx⎡ ⎤
= ⎢ ⎥⎣ ⎦
Forma canónica diagonal:
1 1
2 2
1 0 10 2 1
x xu
x x−⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤
= +⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦
[ ] 1
2
2 1x
yx⎡ ⎤
= − ⎢ ⎥⎣ ⎦
Los valores característicos de una matriz A de n n× son las raíces de la ecuación característica.
0λ =I - A (6.21)
Los valores característicos también se denominan raíces características. Por ejemplo, considere la matriz A siguiente:
0 1 00 0 16 11 6
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥− − −⎣ ⎦
A
La ecuación característica es:
1 00 16 11 6
λλ λ
λ
−⎡ ⎤⎢ ⎥− = −⎢ ⎥⎢ ⎥−⎣ ⎦
I A
3 26 11 6 0 ( 1)( 2)( 3) 0λ λ λ λ λ λ λ− = + + + = ⇒ + + + =I A
Los valores característicos de A son las raíces de la ecuación característica, es decir 1, 2, 3− − − .

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Lección 4: SOLUCIÓN DE LA ECUACIÓN DE ESTADOS En esta sección se obtendrá la solución general de la ecuación de estado lineal e invariante con el tiempo. Primero se considerará el caso homogéneo y luego el no homogéneo. 1. SOLUCIÓN DE LAS ECUACIONES DE ESTADO PARA EL CASO HOMOGÉNEO Antes de resolver las ecuaciones diferenciales matriciales, observe la solución de la ecuación diferencial escalar
x ax= (6.22) Tomando la transformada de Laplace, se obtiene
( ) (0) ( )sX s x aX s− =
Despejando ( )X s :
1( ) (0)X s xs a
=−
La transformada inversa de Laplace de esta última ecuación produce la solución,
( ) (0)atx t e x= (6.23) El enfoque anterior para la solución de la ecuación diferencial escalar homogénea se extiende a la ecuación de estado homogénea:
( ) ( )t t=x Ax (6.24) Tomando la transformada de Laplace, se obtiene
( ) (0) ( )s s s− =X x AX

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Por tanto,
1( ) ( ) (0)s s −= −X I A x
La transformada inversa de Laplace de esta última ecuación produce la solución,
( ) (0)tt e= Ax x (6.25) Donde,
1 1 2 21 1( )2! !
t k ke s t t tk
− −⎡ ⎤= − = + + + + +⎣ ⎦A I A I A A AL (6.26)
Ahora si se escribe la solución de la ecuación de estado homogénea ( ) ( )t t=x Ax como
( ) ( ) (0)t t=x Φ x (6.27) En donde ( )tΦ es una matriz de n n× que satisface la condición
( ) ( ); (0)t t= =Φ AΦ Φ I (6.28) Es claro que ( )tΦ puede estar dada por
( ) tt e= AΦ (6.29) La matriz única ( )tΦ se denomina matriz de transición de estados. La matriz de transición de estados contiene toda la información acerca del movimiento libre del sistema. Si los valores característicos 1 2, , , nλ λ λ… , de la matriz A son distintos, entonces
( )tΦ contendrá las n exponenciales
1 2, , , ntt te e eλλ λ …

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
En particular, si la matriz A es diagonal, entonces
1
2
0 00 0
( )
0 0 n
t
tt
t
ee
t e
e
λ
λ
λ
⎡ ⎤⎢ ⎥⎢ ⎥= =⎢ ⎥⎢ ⎥⎣ ⎦
AΦ (6.30)
Si hay una multiplicidad en los valores característicos, por ejemplo, si los valores característicos de A son 1 1 1 4 5, , , , , , nλ λ λ λ λ λ… , entonces ( )tΦ contendrá además de las exponenciales 51 4, , , , nt tt te e e eλ λλ λ … , términos como 1 12 y t tte t eλ λ A continuación se resumen algunas propiedades importantes de la matriz de transición de estados ( )tΦ : • 0(0) 1e= =AΦ • ( ) [ ]1 1 1( ) ( ) ; ( ) ( )t tt e e t t t
− −− −= = = − = −A AΦ Φ Φ Φ • 1 2 1 2( )
1 2 1 2 2 1( ) ( ) ( ) ( ) ( )t t t tt t e e e t t t t++ = = = =A A AΦ Φ Φ Φ Φ • [ ]( ) ( )nt nt=Φ Φ Ejemplo 6.6 Obtener la matriz de transición de estados ( )tΦ del siguiente sistema:
1 1
2 2
0 12 3
x xx x⎡ ⎤ ⎡ ⎤⎡ ⎤
=⎢ ⎥ ⎢ ⎥⎢ ⎥− −⎣ ⎦⎣ ⎦ ⎣ ⎦
Solución: La matriz de transición de estados ( )tΦ se obtiene mediante
1 1( ) ( )tt e s− −⎡ ⎤= = −⎣ ⎦AΦ I AL

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Dado que,
0 0 1 10 2 3 2 3s s
ss s
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤− = − =⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − +⎣ ⎦ ⎣ ⎦ ⎣ ⎦
I A
La inversa de ( )s −I A se obtiene mediante:
1
3 13 1 ( 1)( 2) ( 1)( 2)1( )
2 2( 1)( 2)( 1)( 2) ( 1)( 2)
ss s s s s
ss ss s
s s s s
−
+⎡ ⎤⎢ ⎥+ + + + +⎡ ⎤ ⎢ ⎥− = =⎢ ⎥− −+ + ⎢ ⎥⎣ ⎦⎢ ⎥+ + + +⎣ ⎦
I A
Por tanto,
2 21 1
2 2
2( ) ( )
2 2 2
t t t tt
t t t t
e e e et e s
e e e e
− − − −− −
− − − −
⎡ ⎤− −⎡ ⎤= = − = ⎢ ⎥⎣ ⎦ − + − +⎣ ⎦
AΦ I AL
2. SOLUCIÓN DE LAS ECUACIONES DE ESTADO PARA EL CASO NO HOMOGÉNEO La solución de la ecuación de estado no homogénea
= +x Ax Bu (6.31) También puede obtenerse mediante el enfoque de la transformada de Laplace. La transformada de Laplace de esta última ecuación produce
( ) (0) ( ) ( )s s s s− = +X x AX BU Por tanto,
1 1( ) ( ) (0) ( ) ( )s s s s− −= − + −X I A x I A BU O bien,
( ) (0) ( )t ts e e s⎡ ⎤ ⎡ ⎤= +⎣ ⎦ ⎣ ⎦A AX x BUL L (6.32)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
La transformada inversa de Laplace de esta última ecuación se obtiene a partir de la integral de convolución, del modo siguiente:
( )
0
( ) (0) ( )t
t tt e e dτ τ τ−= + ∫A Ax x Bu (6.33)
Ejemplo 6.7 Obtener la respuesta en el tiempo del siguiente sistema:
1 1
2 2
0 1 02 3 1
x xu
x x⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤
= +⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦
Solución: La matriz de transición de estados ( ) tt e= AΦ se obtuvo en el ejemplo 6.6 como
2 2
2 2
2( )
2 2 2
t t t tt
t t t t
e e e et e
e e e e
− − − −
− − − −
⎡ ⎤− −= = ⎢ ⎥− + − +⎣ ⎦
AΦ
La respuesta a la entrada escalón se obtiene entonces como
[ ]( ) 2( ) ( ) 2( )
( ) 2( ) ( ) 2( )0
02( ) (0) 1
12 2 2
t t t t tt
t t t t
e e e et e d
e e e e
τ τ τ τ
τ τ τ ττ
− − − − − − − −
− − − − − − − −
⎡ ⎤− − ⎡ ⎤= + ⎢ ⎥ ⎢ ⎥− + − + ⎣ ⎦⎣ ⎦
∫Ax x
O bien,
22 21 1
2 222 2
1 1( ) (0)22 2
( ) (0)2 2 2
t tt t t t
t t t tt t
x t x e ee e e ex t xe e e e e e
− −− − − −
− − − −− −
⎡ ⎤⎡ ⎤ − +− −⎡ ⎤ ⎡ ⎤ ⎢ ⎥= +⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− + − +⎣ ⎦ ⎣ ⎦⎣ ⎦ −⎣ ⎦
Si el estado inicial es cero, entonces ( )tx se puede simplificar a:
21
22
1 1( )2 2
( )
t t
t t
x t e ex t e e
− −
− −
⎡ ⎤− +⎡ ⎤ ⎢ ⎥=⎢ ⎥ ⎢ ⎥⎣ ⎦ −⎣ ⎦

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Lección 5: CONTROLABILIDAD Y OBSERVABILIDAD 1. CONTROLABILIDAD La controlabilidad se ocupa del problema de poder dirigir un sistema de un estado inicial dado, a un estado arbitrario. Se dice que un sistema de control es de estado completamente controlable, si es posible transferir el sistema de un estado inicial arbitrario a cualquier estado deseado (también un estado arbitrario), en un periodo finito. Es decir, un sistema de control es controlable si todas las variables de estado pueden ser controladas en un periodo finito, mediante alguna señal de control no restringida. Si cualquiera de las variables de estado es independiente de la señal de control, entonces resulta imposible controlar esa variable de estado y, por lo tanto, el sistema es no controlable. Considere el sistema está definido por
= +x Ax Bu
= +y Cx Du Donde,
: vector de estado ( 1): vector de control ( 1): vector de salida (1 ): matriz ( ): matriz ( ): matriz ( ): matriz ( )
nrm
n nn rm nm r
××
×××××
xuyABCD
Controlabilidad completa del estado: La condición para la controlabilidad completa del estado es que la matriz de controlabilidad de dimensiones n nr× , dada por
-1n⎡ ⎤⎣ ⎦B AB A B (6.34)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
Sea de rango n , o que contenga n vectores columna, linealmente independientes. La condición para controlabilidad completa del estado también se puede enunciar en términos de las funciones de transferencia o de las matrices de transferencia. Una condición necesaria y suficiente para la controlabilidad completa del estado es que no ocurra cancelación en la función de transferencia o en la matriz de transferencia. Si ocurre cancelación, el sistema no puede ser controlado en la dirección del modo cancelado. Controlabilidad de la salida: La controlabilidad completa del estado no es necesaria ni suficiente para controlar la salida de un sistema de control en tiempo continuo lineal e invariante en el tiempo. Se puede demostrar que la condición para la controlabilidad completa de la salida es que el rango de la matriz:
2 -1n⎡ ⎤⎣ ⎦D CB CAB CA B CA B (6.35) Sea igual a m , ya que esta matriz tiene dimensiones ( 1)m n r× + . 2. OBSERVABILIDAD La observabilidad se ocupa del problema de determinar el estado de un sistema dinámico a partir de observaciones de los vectores de salida y de control. Se dice que un sistema es observable si se puede determinar el estado del mismo, a partir de la observación de los vectores de salida y de control. El concepto de observabilidad es útil para resolver el problema de la reconstrucción de variables de estado no medibles. En la práctica, en los sistemas de control con realimentación de estado se encuentra la dificultad de que algunas de las variables de estado no son accesibles para su medición directa, entonces se requiere estimar las variables de estado no medibles, a fin de construir señales de control de realimentación. Considere el sistema está definido por
=x Ax
=y Cx Donde,

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
: vector de estado ( 1): vector de salida (1 ): matriz ( ): matriz ( )
nm
n nm n
××
××
xyAC
Observabilidad completa: La condición para la observabilidad completa es que la matriz de observabilidad de dimensiones nm n× , dada por:
-1n
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
CCA
CA
(6.36)
Sea de rango n . La matriz de observabilidad también puede ser escrita en términos de la transpuesta conjugada, en este caso la matriz de observabilidad tendrá dimensiones n nm× y se puede escribir de esta forma:
1( )n−⎡ ⎤⎣ ⎦* * * * *C A C A C (6.37)
De igual manera se busca que esta matriz sea de rango n , o que contenga n vectores columna, linealmente independientes. Ejemplo 6.8 Determinar la controlabilidad y observabilidad del siguiente sistema:
1 1
2 2
1 1 02 1 1
x xu
x x⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤
= +⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− −⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦
[ ] 1
2
1 0x
yx⎡ ⎤
= ⎢ ⎥⎣ ⎦
Solución: Dado que se trata de un sistema de segundo orden, la matriz de controlabilidad queda:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
[ ] 0 11 1⎡ ⎤
= ⎢ ⎥−⎣ ⎦B AB
Cuyo rango es 2, lo que indica que el sistema es de estado completamente controlable. Para la controlabilidad de la salida se encuentra que la matriz:
[ ] [ ]0 1=CB CAB Tiene rango 1, por lo tanto, el sistema tiene una salida completamente controlable. Para probar la condición de observabilidad, se encuentra la matriz de observabilidad de la siguiente forma:
1 10 1⎡ ⎤⎡ ⎤ = ⎢ ⎥⎣ ⎦ ⎣ ⎦
* * *C A C
El rango de la matriz de observabilidad es 2, por lo tanto, el sistema es completamente observable.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
ACTIVIDADES DE AUTOEVALUACIÓN DE LA UNIDAD 2 1. ¿Qué condiciones debe tener un sistema de tiempo continuo y un sistema de tiempo discreto para que sean estables? 2. ¿Qué se entiende por error en estado estacionario? 3. ¿Qué diferencia existe entre el “orden” del sistema y el “tipo” de sistema? Escriba algunos ejemplos para sistemas de tiempo continuo y discreto. 4. ¿Qué se entiende por respuesta transitoria? ¿Cuáles son las especificaciones para un sistema de segundo con respuesta subamortiguada? 5. ¿Qué es el lugar geométrico de las raíces y para qué se utiliza? 6. Mencione los pasos necesarios para construir el lugar geométrico de las raíces en sistemas de tiempo continuo y discreto. 7. ¿Qué se entiende por respuesta frecuencial? ¿Qué diagramas se pueden utilizar para realizar el análisis frecuencial? 8. Defina ancho de banda, margen de ganancia y margen de fase. 9. ¿Cuáles son las maneras de representar un sistema en espacio de estado? De dos ejemplos de cada una. 10. ¿Qué se entiende por controlabilidad y observabilidad?

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNADESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CUSO: 201527 – SISTEMAS DINÁMICOS
FUENTES DOCUMENTALES DE LA UNIDAD 2 DOCUMENTOS IMPRESOS DORF,Richard y BISHOP, Robert. Sistemas de control moderno. Décima edición. Madrid: Pearson Prentice-Hall, 2005. 882p. KUO, Benjamin. Sistemas de control automático. Séptima edición. México D.F.: Prentice-Hall Hispanoamericana S.A., 1996. 897p. OGATA, Katsuhiko. Ingeniería de control moderna. Tercera edición. México D.F.: Prentice-Hall Hispanoamericana S.A., 1998. 997p. OGATA, Katsuhiko. Sistemas de control en tiempo discreto. Segunda edición. México D.F.: Prentice-Hall Hispanoamericana S.A., 1996. 745p. SMITH, Carlos y CORRIPIO, Armando. Control automático de procesos: Teoría y práctica. México D.F.: Editorial Limusa S.A., 1991. 717p. DIRECCIONES DE SITIOS WEB DUARTE, Oscar. Programa universidad virtual (online), (Bogotá, Colombia), 2005 (visitado 30 de junio, 2009). http://www.virtual.unal.edu.co/cursos/ingenieria/2001619/index.html GUTIERREZ, Álvaro. Robolabo (online). (España), (visitado 30 de junio, 2009). http://138.100.21.254/labo/b_alumnos/curso_sist_control_2005/ Regents of University of Michigan. Tutoriales de control con MATLAB (online). (Michigan, USA), septiembre de 1997 (visitado 30 de junio, 2009). http://www.ib.cnea.gov.ar/~control2/Links/Tutorial_Matlab_esp/index.html SEGURA, Cristian. Introducción a señales, sistemas y control (online). (España), abril de 2007 (visitado 30 de junio, 2009). http://es.wikibooks.org/wiki/Introducci%C3%B3n_a_Se%C3%B1ales%2C_Sistemas_y_Control TORRES, Carmen y AGUILAR, José. Curso interactivo de sistemas de control (online). (Madrid, España), octubre de 2002 (visitado 30 de junio, 2009). http://www.dma.fi.upm.es/ctorres/Curso%2DInteractivo%2DControl/